JP2012063243A - 角速度および加速度検出用複合センサ - Google Patents
角速度および加速度検出用複合センサ Download PDFInfo
- Publication number
- JP2012063243A JP2012063243A JP2010207506A JP2010207506A JP2012063243A JP 2012063243 A JP2012063243 A JP 2012063243A JP 2010207506 A JP2010207506 A JP 2010207506A JP 2010207506 A JP2010207506 A JP 2010207506A JP 2012063243 A JP2012063243 A JP 2012063243A
- Authority
- JP
- Japan
- Prior art keywords
- acceleration
- angular velocity
- terminal
- electrode
- vibrator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Gyroscopes (AREA)
Abstract
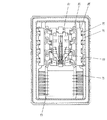
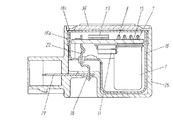
【解決手段】振動子61を防振端子81を介してケース70に固定するとともに、加速度検出素子87をケース70にリジッドに固定する構成とした。
【選択図】図1
Description
70 ケース
75 端子電極
76 電源電極
77 GND電極
78 出力電極
81 防振端子
87 加速度検出素子
88 IC
Claims (1)
- 角速度を検出する振動子と、加速度を検出する加速度検出素子と、前記振動子から発生する角速度出力信号を処理するとともに加速度検出素子から発生する加速度出力信号を処理するICと、前記振動子、加速度検出素子およびICを収納するとともに、内側面に端子電極を設け、さらに外底面に電源電極、GND電極および出力電極を設けたケースとを備え、前記振動子を防振端子を介してケースに固定するとともに、加速度検出素子をケースにリジッドに固定するように構成した角速度および加速度検出用複合センサ。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010207506A JP2012063243A (ja) | 2010-09-16 | 2010-09-16 | 角速度および加速度検出用複合センサ |
| PCT/JP2011/000842 WO2011102121A1 (ja) | 2010-02-18 | 2011-02-16 | 角速度センサおよび角速度および加速度検出用複合センサ |
| EP11744412.5A EP2538175B1 (en) | 2010-02-18 | 2011-02-16 | Angular speed sensor and composite sensor for detecting angular speed and acceleration |
| EP14200345.8A EP2876411A1 (en) | 2010-02-18 | 2011-02-16 | Angular speed sensor and composite sensor for detecting angular speed |
| US13/579,346 US9091543B2 (en) | 2010-02-18 | 2011-02-16 | Angular speed sensor for detecting angular speed |
| US14/568,953 US20150135830A1 (en) | 2010-02-18 | 2014-12-12 | Angular velocity sensor and angular velocity and acceleration detecting composite sensor |
| US14/745,686 US9448068B2 (en) | 2010-02-18 | 2015-06-22 | Angular velocity sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010207506A JP2012063243A (ja) | 2010-09-16 | 2010-09-16 | 角速度および加速度検出用複合センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012063243A true JP2012063243A (ja) | 2012-03-29 |
Family
ID=46059107
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010207506A Pending JP2012063243A (ja) | 2010-02-18 | 2010-09-16 | 角速度および加速度検出用複合センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012063243A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9933261B2 (en) | 2015-01-06 | 2018-04-03 | Seiko Epson Corporation | Physical quantity sensor, electronic apparatus and moving object |
| US11372018B2 (en) | 2019-11-29 | 2022-06-28 | Seiko Epson Corporation | Sensor unit, electronic apparatus, and moving object |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283424A (ja) * | 2004-03-30 | 2005-10-13 | Denso Corp | 力学量センサ装置 |
| WO2006132277A1 (ja) * | 2005-06-09 | 2006-12-14 | Matsushita Electric Industrial Co., Ltd. | 複合センサ |
| JP2007040766A (ja) * | 2005-08-01 | 2007-02-15 | Toyota Motor Corp | センサユニット |
| JP2009080107A (ja) * | 2007-09-03 | 2009-04-16 | Panasonic Corp | 慣性力センサ |
-
2010
- 2010-09-16 JP JP2010207506A patent/JP2012063243A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005283424A (ja) * | 2004-03-30 | 2005-10-13 | Denso Corp | 力学量センサ装置 |
| WO2006132277A1 (ja) * | 2005-06-09 | 2006-12-14 | Matsushita Electric Industrial Co., Ltd. | 複合センサ |
| JP2007040766A (ja) * | 2005-08-01 | 2007-02-15 | Toyota Motor Corp | センサユニット |
| JP2009080107A (ja) * | 2007-09-03 | 2009-04-16 | Panasonic Corp | 慣性力センサ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9933261B2 (en) | 2015-01-06 | 2018-04-03 | Seiko Epson Corporation | Physical quantity sensor, electronic apparatus and moving object |
| US11372018B2 (en) | 2019-11-29 | 2022-06-28 | Seiko Epson Corporation | Sensor unit, electronic apparatus, and moving object |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2011102121A1 (ja) | 角速度センサおよび角速度および加速度検出用複合センサ | |
| JP2003004450A (ja) | 角速度および加速度検出用複合センサ | |
| US9453851B2 (en) | Composite sensor for detecting angular velocity and acceleration | |
| JP3807404B2 (ja) | 角速度センサ | |
| JP4715153B2 (ja) | 角速度センサ | |
| TW201344156A (zh) | 振動片及陀螺儀感測器以及電子機器及移動體 | |
| JP4449504B2 (ja) | 角速度センサ | |
| JP2001264070A (ja) | 角速度センサ | |
| JP2012063243A (ja) | 角速度および加速度検出用複合センサ | |
| CN112014588B (zh) | 惯性传感器单元的安装方法以及惯性传感器单元 | |
| WO2001020258A1 (en) | Angular velocity sensor | |
| JP2008170295A (ja) | 角速度センサ | |
| JP5786114B2 (ja) | 角速度センサ | |
| JP4529286B2 (ja) | 角速度センサ | |
| JP4304742B2 (ja) | 角速度センサ | |
| JP2009229071A (ja) | 角速度センサ | |
| JP2013120179A (ja) | 角速度センサ | |
| JP2014085263A (ja) | 角速度センサ | |
| JP2016188809A (ja) | 角速度センサ | |
| JP2009192459A (ja) | 角速度センサ | |
| JP2013205155A (ja) | 角速度センサ | |
| JP2012242230A (ja) | 角速度センサ | |
| JP2013200240A (ja) | 角速度センサおよびその製造方法 | |
| JP2012108090A (ja) | 角速度センサ | |
| JP2008232889A (ja) | 角速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130917 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20131015 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140108 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20140417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140701 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20141007 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141104 |