JP2010035168A - イメージング装置および方法 - Google Patents
イメージング装置および方法 Download PDFInfo
- Publication number
- JP2010035168A JP2010035168A JP2009171682A JP2009171682A JP2010035168A JP 2010035168 A JP2010035168 A JP 2010035168A JP 2009171682 A JP2009171682 A JP 2009171682A JP 2009171682 A JP2009171682 A JP 2009171682A JP 2010035168 A JP2010035168 A JP 2010035168A
- Authority
- JP
- Japan
- Prior art keywords
- image sensor
- pixel
- light
- light component
- pixels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/50—Control of the SSIS exposure
- H04N25/57—Control of the dynamic range
- H04N25/58—Control of the dynamic range involving two or more exposures
- H04N25/581—Control of the dynamic range involving two or more exposures acquired simultaneously
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/10—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths
- H04N23/12—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from different wavelengths with one sensor only
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/131—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements including elements passing infrared wavelengths
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/134—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on three different wavelength filter elements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/10—Circuitry of solid-state image sensors [SSIS]; Control thereof for transforming different wavelengths into image signals
- H04N25/11—Arrangement of colour filter arrays [CFA]; Filter mosaics
- H04N25/13—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements
- H04N25/135—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on four or more different wavelength filter elements
- H04N25/136—Arrangement of colour filter arrays [CFA]; Filter mosaics characterised by the spectral characteristics of the filter elements based on four or more different wavelength filter elements using complementary colours
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/705—Pixels for depth measurement, e.g. RGBZ
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/77—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/77—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components
- H04N25/778—Pixel circuitry, e.g. memories, A/D converters, pixel amplifiers, shared circuits or shared components comprising amplifiers shared between a plurality of pixels, i.e. at least one part of the amplifier must be on the sensor array itself
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/78—Readout circuits for addressed sensors, e.g. output amplifiers or A/D converters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
- G01S17/894—3D imaging with simultaneous measurement of time-of-flight at a 2D array of receiver pixels, e.g. time-of-flight cameras or flash lidar
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Solid State Image Pick-Up Elements (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Measurement Of Optical Distance (AREA)
- Color Television Image Signal Generators (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
【解決手段】 本発明のイメージセンサは、複数のピクセルを含み、複数のピクセルそれぞれは、光検出エレメントと、可視光成分を光検出エレメントに選択的に帯域通過させ、非可視光成分を光検出エレメントに帯域通過させるフィルタとを含む。これにより、同じピクセルを用いてカラー値および深さ値を得ることができる。
【選択図】 図1
Description
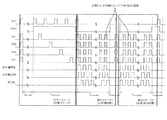
イメージセンサは、Tread_color時間区間の間に取得したカラーイメージ情報を用いて可視光線による影響を除去することができる。カラー取得時に格納された電荷Qcolは、下記の式(3)のように表される。
ここで、Tcolはカラー積分時間(color integration time)であり、TdepおよびTcol間には一定の比例関係が成立するため、この関係を下記の式(4)のように表すことができる。
ここで、kは比例定数である。

120:第1深さフレーム
130:第2カラーフレーム
140:第2深さフレーム
Claims (79)
- 複数のピクセルを含み、前記複数のピクセルのうちの少なくとも1つのピクセルからカラー値および深さ値を得るイメージセンサ。
- 前記少なくとも1つのピクセルは最小限、互いに隣接しない第1波長バンド(wavelength band)および第2波長バンドを帯域通過させる請求項1に記載のイメージセンサ。
- 前記少なくとも1つのピクセルは、第1ピクセルおよび第2ピクセルを含み、前記第1ピクセルは最小限、第1波長バンドおよび第2波長バンドを帯域通過させ、前記第2ピクセルは最小限、第2波長バンドおよび第3波長バンドを通過させる(ただし、前記第1波長バンドと前記第3波長バンドは相違する)請求項1に記載のイメージセンサ。
- 第1時間区間の間に前記少なくとも1つのピクセルから前記カラー値を得て、第2時間区間の間に前記少なくとも1つのピクセルから前記深さ値を得る請求項1に記載のイメージセンサ。
- 光源から前記第2時間区間の間に選択的に照射された光によって反射した反射光を用いて前記深さ値を得る請求項4に記載のイメージセンサ。
- 前記複数のピクセルがそれぞれのカラー値およびそれぞれの深さ値の取得に用いられる請求項1に記載のイメージセンサ。
- 光源と、
複数のピクセルを含み、前記複数のピクセルのうちの少なくとも1つのピクセルからカラー値および深さ値を得るイメージセンサと、
を含むイメージング装置。 - 前記少なくとも1つのピクセルは最小限、互いに隣接しない第1波長バンドおよび第2波長バンドを帯域通過させる請求項7に記載のイメージング装置。
- 前記少なくとも1つのピクセルは、第1ピクセルおよび第2ピクセルを含み、前記第1ピクセルは最小限、第1波長バンドおよび第2波長バンドを帯域通過させ、前記第2ピクセルは最小限、第2波長バンドおよび第3波長バンドを通過させる(ただし、前記第1波長バンドと前記第3波長バンドは相違する)請求項5に記載のイメージング装置。
- 第1時間区間の間に前記少なくとも1つのピクセルから前記カラー値を得て、第2時間区間の間に前記少なくとも1つのピクセルから前記深さ値を得る請求項7に記載のイメージング装置。
- 前記光源は前記第2時間区間の間に選択的に光を照射する請求項10に記載のイメージング装置。
- 前記照射された光は非可視光線である請求項11に記載のイメージング装置。
- 前記照射された光は赤外線である請求項12に記載のイメージング装置。
- 前記少なくとも1つのピクセルは、前記第1時間区間の間に第1光成分を感知し、前記第2時間区間の間に第2光成分を感知する請求項10に記載のイメージング装置。
- 前記第1時間区間の間に感知された前記第1光成分に基づいて前記カラー値を得て、前記第2時間区間の間に感知された前記第2光成分に基づいて前記深さ値を得る請求項14に記載のイメージング装置。
- 前記複数のピクセルがそれぞれのカラー値およびそれぞれの深さ値の取得に用いられる請求項7に記載のイメージング装置。
- 複数のピクセルを含み、
前記複数のピクセルそれぞれは、
光検出エレメントと、
可視光成分を前記光検出エレメントに選択的に帯域通過させ、非可視光成分を前記光検出エレメントに帯域通過させるフィルタと、
を含むイメージセンサ。 - 前記光検出エレメントはフォトダイオードである請求項17に記載のイメージセンサ。
- 前記非可視光成分は赤外線である請求項17に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、赤色光成分および非可視光成分を帯域通過させるフィルタを含む請求項17に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、緑色光成分および非可視光成分を帯域通過させるフィルタを含む請求項13に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、青色光成分および非可視光成分を帯域通過させるフィルタを含む請求項17に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、青緑色光成分および非可視光成分を帯域通過させるフィルタを含む請求項17に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、赤紫色光成分および非可視光成分を帯域通過させるフィルタを含む請求項17に記載のイメージセンサ。
- 前記複数のピクセルのうちの少なくとも1つのピクセルは、黄色光成分および非可視光成分を帯域通過させるフィルタを含む請求項17に記載のイメージセンサ。
- 前記複数のピクセルそれぞれが含むフィルタの面積は同じである請求項17に記載のイメージセンサ。
- 前記複数のピクセルは、繰り返される2×2ピクセルグループのアレイを含む請求項17に記載のイメージセンサ。
- 前記繰り返される2×2ピクセルグループの少なくとも1つの2×2ピクセルグループのアレイは、赤色ピクセル、青色ピクセル、および2つの緑色ピクセルを含む請求項27に記載のイメージセンサ。
- 前記繰り返される2×2ピクセルグループの少なくとも1つの2×2ピクセルグループのアレイは、青緑色ピクセル、赤紫色ピクセルエレメント、黄色ピクセル、および緑色ピクセルを含む請求項27に記載のイメージセンサ。
- 前記複数のピクセルそれぞれは、
前記光検出エレメントを浮遊拡散ノードと連結する第1伝達部と、
前記浮遊拡散ノードの電圧および行制御信号に基づいてビットラインの電圧を制御する選択駆動部と、
前記光検出エレメントをシンクラインと連結する第2伝達部と、
を備える請求項17に記載のイメージセンサ。 - 前記複数のピクセルのうちの少なくとも2つのピクセルは、それぞれの第1伝達部および共通の浮遊拡散ノードを含み、前記少なくとも2つのピクセルは、選択的に個々に(selectively separately)対応するそれぞれの光検出エレメントを前記浮遊拡散ノードに連結し、共通で(collectively)前記対応する光検出エレメントを前記浮遊拡散ノードに連結する請求項30に記載のイメージセンサ。
- 非可視光成分を生成する光源と、
複数のピクセルと、
を含み、
前記複数のピクセルそれぞれは、
光検出エレメントと、
可視光成分を前記光検出エレメントに選択的に帯域通過させ、非可視光成分を前記光検出エレメントに帯域通過させるフィルタと、
を含むイメージング装置。 - 前記複数のピクセルそれぞれは、
前記可視光成分に基づいてカラー値を得て、前記非可視光成分に基づいて深さ値を得る請求項32に記載のイメージング装置。 - 前記複数のピクセルから得られた前記カラー値を組み合わせてカラーイメージを得て、前記複数のピクセルから得られた前記深さ値を組み合わせて深さイメージを得る請求項33に記載のイメージング装置。
- 前記複数のピクセルそれぞれは、
第1時間区間の間に前記カラー値を得て、第2時間区間の間に前記深さ値を得る請求項33に記載のイメージング装置。 - 前記光源は、
前記第2時間区間の間に選択的に前記非可視光成分を生成する請求項35に記載のイメージング装置。 - 少なくとも1つのピクセルを含み、
前記少なくとも1つのピクセルは、
光検出エレメントを浮遊拡散ノードと連結する第1伝達部と、
前記浮遊拡散ノードの電圧および行制御信号に基づいてビットラインの電圧を制御する駆動部と、
前記光検出エレメントをシンクラインと連結する第2伝達部と、
を備えるイメージセンサ。 - 前記浮遊拡散ノードは、選択的に、前記少なくとも1つのピクセルの前記第1伝達部またはイメージセンサの他のピクセルの第1伝達部に電気的に連結される請求項37に記載のイメージング装置。
- 前記少なくとも1つのピクセルおよび前記他のピクセルは、選択的に個々に対応するそれぞれの光検出エレメントを前記浮遊拡散ノードに連結し、共通で前記少なくとも1つのピクセルの前記対応する光検出エレメントを前記浮遊拡散ノードに連結する請求項38に記載のイメージング装置。
- 前記第1伝達部は、活性時間区間の間に前記光検出エレメントによって生成された電荷を前記浮遊拡散ノードに伝達し、非活性時間区間の間に前記光検出エレメントおよび前記浮遊拡散ノードの間を電気的に遮断する請求項37に記載のイメージセンサ。
- 前記第2伝達部は、
前記活性時間区間の間に前記光検出エレメントおよび前記シンクラインの間を電気的に遮断し、前記非活性時間区間の間に前記光検出エレメントによって生成された電荷を前記シンクラインに伝達する請求項40に記載のイメージセンサ。 - 前記第2伝達部はトランジスタであり、
前記トランジスタのゲート端子およびソース端子は前記シンクラインに連結され、前記トランジスタのドレイン端子は前記光検出エレメントに連結される請求項40に記載のイメージセンサ。 - 前記第1伝達部は、
前記活性時間区間の間、物体と前記少なくとも1つのピクセルの間の距離に相応する正の電荷を前記浮遊拡散ノードに伝達する請求項40に記載のイメージセンサ。 - 前記少なくとも1つのピクセルは、
リセット制御信号によって前記浮遊拡散ノードの電圧をリセットするリセットトランジスタ、
をさらに備える請求項37に記載のイメージセンサ。 - 前記選択駆動部は、
駆動トランジスタと、
選択トランジスタと、
を備え、
前記駆動トランジスタのゲート端子は前記浮遊拡散ノードに連結され、前記駆動トランジスタのドレイン端子は電源に連結され、前記駆動トランジスタのソース端子は前記選択トランジスタのドレイン端子に連結され、
前記選択トランジスタのゲート端子は前記行制御信号に連結され、前記選択トランジスタのソース端子は前記ビットラインに連結される請求項37に記載のイメージセンサ。 - 前記選択駆動部は、
入力端子は前記浮遊拡散ノードに連結され、負の利得を有する増幅器と、
前記増幅器の入力端子および出力端子に連結されるコンデンサと、
リセット制御信号によって前記増幅器の入力端子および出力端子の間の電位差をリセットするリセットトランジスタと、
選択トランジスタと、
を備え、
前記選択トランジスタのゲート端子は前記行制御信号に連結され、前記選択トランジスタのドレイン端子は前記増幅器の出力端子に連結され、前記選択トランジスタのソース端子は前記ビットラインに連結される請求項37に記載のイメージセンサ。 - 4個のピクセルが1つの浮遊拡散ノードを共有する請求項37に記載のイメージセンサ。
- イメージセンサのピクセルを用いて第1時間区間の間に第1光成分を感知するステップと、
前記イメージセンサの前記ピクセルを用いて第2時間区間の間に第2光成分を感知するステップ(ただし、前記第1光成分は、前記第2光成分と相違する特徴を有する)と、
を含むイメージング方法。 - 前記第1光成分を感知するステップは、前記第1光成分の強度(intensity)を測定するステップを含み、前記第2光成分を感知するステップは、前記第2光成分のTOF(Time of flight)を測定するステップを含む請求項48に記載のイメージング方法。
- 前記第1光成分は可視光成分であり、前記第2光成分は非可視光成分である請求項48に記載のイメージング方法。
- 前記第2光成分は赤外線である請求項50に記載のイメージング方法。
- 前記第1時間区間の間に感知された前記第1光成分に基づいて前記ピクセルのカラー値を生成するステップと、
前記第2時間区間の間に感知された前記第2光成分に基づいて前記ピクセルの深さ値を生成するステップと、
をさらに含む請求項48に記載のイメージング方法。 - イメージセンサ内の共に配置された(co−located)複数のピクセルを用いて第1時間区間の間に第1光成分を感知するステップと、
前記第1時間区間以後に第2光成分を照射するステップ(ただし、前記第1光成分は、前記第2光成分と相違する特徴を有する)と、
前記イメージセンサの前記複数のピクセルを用いて前記第2光成分が物体によって反射した反射光を第2時間区間の間に感知するステップと、
前記感知された反射光から前記物体の深さイメージを得るステップと、
を含むイメージング方法。 - 前記第1光成分を感知するステップは、前記第1光成分の強度を測定するステップを含み、前記第2光成分を感知するステップは、前記第2光成分のTOFを測定するステップを含む請求項53に記載のイメージング方法。
- 前記第1光成分は可視光成分であり、前記第2光成分は非可視光成分である請求項53に記載のイメージング方法。
- 前記第2光成分は赤外線である請求項55に記載のイメージング方法。
- 前記第1時間区間の間に感知された前記第1光成分に基づいて前記物体のカラーイメージを生成するステップ、
をさらに含む請求項53に記載のイメージング方法。 - 前記物体のカラーイメージを生成するステップは、
前記イメージセンサの前記複数のピクセルそれぞれを用いて感知された前記第1光成分に基づいて前記共に配置された複数のピクセルそれぞれのカラー値を生成するステップと、
前記複数のピクセルそれぞれのカラー値を組み合わせて前記物体のカラーイメージを生成するステップと、
を含む請求項57に記載のイメージング方法。 - 前記物体のカラーイメージを得るステップは、
前記第1時間区間の間に感知された前記第1光成分に基づいて第1感知情報を生成するステップと、
前記第1感知情報に対して前記第1光成分以外の他の光成分の影響によって発生した雑音を除去するステップと、
を含む請求項57に記載のイメージング方法。 - 前記第1光成分以外の他の光成分は第2光成分である請求項59に記載のイメージング方法。
- 前記物体の深さイメージを生成するステップは、
前記イメージセンサの前記複数のピクセルそれぞれを用いて感知された前記反射光に基づいて前記複数のピクセルそれぞれの深さ値を生成するステップと、
前記複数のピクセルそれぞれの深さ値を組み合わせて前記物体の深さイメージを生成するステップと、
を含む請求項53に記載のイメージング方法。 - 前記物体の深さイメージを生成するステップは、
前記第2時間区間の間に感知された前記第2光成分に基づいて第2感知情報を生成するステップと、
前記第2感知情報に対して前記第2光成分以外の他の光成分の影響によって発生した雑音を除去するステップと、
を含む請求項53に記載のイメージング方法。 - 前記第2光成分以外の他の光成分は前記第1光成分である請求項62に記載のイメージング方法。
- 前記物体の深さイメージを生成するステップは、
前記第2光成分を照射するステップおよび前記反射光を前記第2時間区間の間に感知するステップが閾値回数だけ繰り返して実行された後に実行される請求項53に記載のイメージング方法。 - 前記反射光を前記第2時間区間の間に感知するステップは、
前記第2時間区間の活性時間区間の間に前記感知された反射光によって生成された電荷に関連する情報をビットラインに伝達するステップと、
前記第2時間区間の非活性時間区間の間に前記感知された反射光によって生成された電荷を放電するステップと、
を含む請求項53に記載のイメージング方法。 - 少なくとも1つのピクセルをイメージセンサで構成し、前記少なくとも1つのピクセルは、光検出エレメントおよびバンドパスフィルタを含ませるステップを含むように構成し、
前記少なくとも1つのピクセルは、
前記光検出エレメントを浮遊拡散ノードに連結させる第1伝達部と、
前記浮遊拡散ノードの電圧および行制御信号に基づいてビットラインの電圧を制御する駆動部と、
前記光検出エレメントをシンクラインと連結する第2伝達部と、
を含むように構成するイメージセンサ製造方法。 - 前記浮遊拡散ノードは、選択的に、前記少なくとも1つのピクセルの前記第1伝達部および前記イメージセンサの他のピクセルの第2伝達部に電気的に連結されるようにさらに構成する請求項66に記載のイメージセンサ製造方法。
- 前記少なくとも1つのピクセルおよび前記他のピクセルは、選択的に個々に、1つの対応する光検出エレメントを前記浮遊拡散ノードに連結し、前記少なくとも1つのピクセルおよび前記他のピクセルの前記対応する光検出エレメントを前記浮遊拡散ノードに共通に連結されるようにさらに構成する請求項67に記載のイメージセンサ製造方法。
- 前記第1伝達部は、前記光検出エレメントによって生成された電荷を特定の活性時間周期(defined active time period)の間に前記浮遊拡散ノードに伝達し、特定の非活性時間周期(defined inactive time period)の間に前記光検出エレメントと前記浮遊拡散ノードの間の連結を断絶するようにさらに構成する請求項66に記載のイメージセンサ製造方法。
- 前記第2伝達部は、前記活性時間周期の間に前記光検出エレメントと前記シンクラインの間の連結を断絶し、前記光検出エレメントによって生成された電荷を前記非活性時間周期の間に前記シンクラインに伝達するようにさらに構成する請求項69に記載のイメージセンサ製造方法。
- 前記第2伝達部は、ゲート端子(gate terminal)およびソース端子(source terminal)が前記シンクラインに連結され、ドレイン端子(drain terminal)が前記光検出エレメントに連結されるトランジスタとなるようにさらに構成される請求項69に記載のイメージセンサ製造方法。
- 前記第1伝達部は、前記少なくとも1つのピクセルによって感知された光に対応する蓄積電荷(accumulated charge)を前記活性時間周期の間に前記浮遊拡散ノードに伝達するようにさらに構成する請求項69に記載のイメージセンサ製造方法。
- 前記少なくとも1つのピクセルがリセットトランジスタ(reset transistor)およびリセット制御線(reset control line)をさらに含むようにさらに構成する(ただし、前記リセットトランジスタは、前記リセット制御線のリセット制御信号に対応して前記浮遊拡散ノードの電圧をリセットする)請求項66に記載のイメージセンサ製造方法。
- 前記駆動部が駆動トランジスタ(drivind transistor)および選択トランジスタ(selective transistor)をさらに含むように構成され、
前記駆動トランジスタのゲート端子は、前記浮遊拡散ノードに連結され、前記駆動トランジスタのドレイン端子は電源に連結され、前記駆動トランジスタのソース端子は、前記選択トランジスタのドレイン端子に連結され、
前記選択トランジスタのゲート端子は行信号線(row signal line)に連結され、前記選択トランジスタのソース端子は前記ビットライン信号線に連結される請求項66に記載のイメージセンサ製造方法。 - 前記駆動部は、
負の利得(negative gain)を有する増幅器(amplifier)と、
前記浮遊拡散ノードに連結された入力端子と、
前記入力端子および前記増幅器の出力端子に連結されたキャパシタ(capacitor)と、
リセット信号に対応して、前記入力端子および前記増幅器の前記出力端子の間の電圧差をリセットするリセットトランジスタと、
を含むように構成され、
前記駆動部は、ゲート端子が前記行信号線に連結され、ドレイン端子が前記増幅器の前記出力端子に連結され、ソース端子が前記ビットライン信号線に連結された、選択トランジスタを含むように構成する請求項66に記載のイメージセンサ製造方法。 - 前記イメージセンサは、複数のピクセルグループを含むように構成し、
前記複数のピクセルグループのうち、1つのピクセルグループは単一の浮遊拡散ノードを共有し、前記1つのピクセルグループは、前記1つのグループを構成するピクセルそれぞれから蓄積された電荷を選択的に前記単一浮遊拡散ノードに共通または分割して伝達するようにさらに構成する請求項66に記載のイメージセンサ製造方法。 - 前記イメージング方法を実行する少なくとも1つの処理装置を制御するコンピュータ読み取り可能なコード(computer readable code)を含む請求項48に記載のコンピュータ読み取り可能な記録媒体。
- 前記イメージング方法を実行する少なくとも1つの処理装置を制御するコンピュータ読み取り可能なコードを含む請求項53に記載のコンピュータ読み取り可能な記録媒体。
- 前記イメージセンサ製造方法を実行する少なくとも1つの処理装置を制御するコンピュータ読み取り可能なコードを含む請求項48に記載のコンピュータ読み取り可能な記録媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080072992A KR101467509B1 (ko) | 2008-07-25 | 2008-07-25 | 이미지 센서 및 이미지 센서 동작 방법 |
| KR10-2008-0072992 | 2008-07-25 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010035168A true JP2010035168A (ja) | 2010-02-12 |
| JP5599170B2 JP5599170B2 (ja) | 2014-10-01 |
Family
ID=41228399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009171682A Active JP5599170B2 (ja) | 2008-07-25 | 2009-07-23 | イメージング装置及びイメージング方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US8344306B2 (ja) |
| EP (1) | EP2148514A1 (ja) |
| JP (1) | JP5599170B2 (ja) |
| KR (1) | KR101467509B1 (ja) |
| CN (2) | CN101635860B (ja) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012216692A (ja) * | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | 単位画素及び固体撮像装置並びに単位画素の信号加算方法 |
| JP2013068606A (ja) * | 2011-08-19 | 2013-04-18 | Semiconductor Energy Lab Co Ltd | 半導体装置の駆動方法 |
| WO2013099537A1 (en) * | 2011-12-26 | 2013-07-04 | Semiconductor Energy Laboratory Co., Ltd. | Motion recognition device |
| WO2013133143A1 (en) * | 2012-03-09 | 2013-09-12 | Semiconductor Energy Laboratory Co., Ltd. | Method for driving semiconductor device |
| WO2014122714A1 (ja) * | 2013-02-07 | 2014-08-14 | パナソニック株式会社 | 撮像装置及びその駆動方法 |
| US9018573B2 (en) | 2011-03-31 | 2015-04-28 | Honda Motor Co., Ltd. | Solid-state image sensing device with a change-over switch |
| KR20150090778A (ko) * | 2014-01-29 | 2015-08-06 | 엘지이노텍 주식회사 | 깊이 정보 추출 장치 및 방법 |
| KR20150092612A (ko) * | 2014-02-05 | 2015-08-13 | 엘지전자 주식회사 | 입체적 형상을 감지하기 위한 카메라 및 그것의 제어 방법 |
| JP2015192341A (ja) * | 2014-03-28 | 2015-11-02 | キヤノン株式会社 | 撮像システム |
| US9455289B2 (en) | 2013-05-10 | 2016-09-27 | Canon Kabushiki Kaisha | Solid-state image sensor and camera |
| WO2017098725A1 (ja) * | 2015-12-08 | 2017-06-15 | パナソニックIpマネジメント株式会社 | 固体撮像装置、距離測定装置および距離測定方法 |
| US9729809B2 (en) | 2014-07-11 | 2017-08-08 | Semiconductor Energy Laboratory Co., Ltd. | Semiconductor device and driving method of semiconductor device or electronic device |
| JP2019047486A (ja) * | 2017-08-31 | 2019-03-22 | キヤノン株式会社 | 固体撮像素子及び撮像装置 |
| JP2019109219A (ja) * | 2017-10-27 | 2019-07-04 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | ダイクロイックミラーを使用する、自律走行車のための3d−lidarシステム |
| CN110072069A (zh) * | 2018-01-23 | 2019-07-30 | 三星电子株式会社 | 图像传感器 |
| KR20190089701A (ko) * | 2018-01-23 | 2019-07-31 | 삼성전자주식회사 | 이미지 센서 |
| US10401217B2 (en) | 2016-08-30 | 2019-09-03 | Samsung Electronics Co., Ltd. | Data output device |
| US10612973B2 (en) | 2017-06-22 | 2020-04-07 | Denso Corporation | Light detection device |
| KR20200108735A (ko) * | 2019-03-11 | 2020-09-21 | 엘지이노텍 주식회사 | 카메라 장치 |
| JP2021534378A (ja) * | 2018-08-09 | 2021-12-09 | アウスター インコーポレイテッド | マルチスペクトル測距/撮像センサアレイ及びシステム |
| JP2022522952A (ja) * | 2019-01-15 | 2022-04-21 | エコール ポリテクニーク フェデラル デ ローザンヌ (イーピーエフエル) | 飛行時間型装置および3d光学検出器 |
| US11558572B2 (en) | 2012-02-17 | 2023-01-17 | Canon Kabushiki Kaisha | Photoelectric conversion apparatus and image pickup system |
| US11658193B2 (en) | 2018-01-23 | 2023-05-23 | Samsung Electronics Co., Ltd. | Image sensor |
| WO2023145782A1 (ja) | 2022-01-28 | 2023-08-03 | 国立大学法人静岡大学 | 固体撮像装置 |
| US11733092B2 (en) | 2018-08-09 | 2023-08-22 | Ouster, Inc. | Channel-specific micro-optics for optical arrays |
| WO2024071095A1 (ja) * | 2022-09-27 | 2024-04-04 | ヌヴォトンテクノロジージャパン株式会社 | 撮像装置、測距装置及び撮像装置の製造方法 |
| JP2024062980A (ja) * | 2018-07-16 | 2024-05-10 | ギガジョット テクノロジー,インコーポレイテッド | 非アバランシェ光検出器を有する高感度深度センサ |
Families Citing this family (177)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5584982B2 (ja) * | 2009-02-09 | 2014-09-10 | ソニー株式会社 | 固体撮像素子およびカメラシステム |
| KR101483462B1 (ko) * | 2008-08-27 | 2015-01-16 | 삼성전자주식회사 | 깊이 영상 획득 장치 및 방법 |
| US8194149B2 (en) * | 2009-06-30 | 2012-06-05 | Cisco Technology, Inc. | Infrared-aided depth estimation |
| US8405751B2 (en) * | 2009-08-03 | 2013-03-26 | International Business Machines Corporation | Image sensor pixel structure employing a shared floating diffusion |
| KR101648353B1 (ko) * | 2009-09-25 | 2016-08-17 | 삼성전자 주식회사 | 거리 센서를 포함하는 이미지 센서 |
| US20110175981A1 (en) * | 2010-01-19 | 2011-07-21 | Chun-Hung Lai | 3d color image sensor |
| KR101108742B1 (ko) * | 2010-03-02 | 2012-02-24 | 국립대학법인 울산과학기술대학교 산학협력단 | 투명 적외선 센서를 이용한 단안 3차원 영상 포획 소자 |
| US8279418B2 (en) * | 2010-03-17 | 2012-10-02 | Microsoft Corporation | Raster scanning for depth detection |
| KR101289269B1 (ko) * | 2010-03-23 | 2013-07-24 | 한국전자통신연구원 | 영상 시스템에서 영상 디스플레이 장치 및 방법 |
| US8514269B2 (en) * | 2010-03-26 | 2013-08-20 | Microsoft Corporation | De-aliasing depth images |
| US8330804B2 (en) * | 2010-05-12 | 2012-12-11 | Microsoft Corporation | Scanned-beam depth mapping to 2D image |
| JP5663573B2 (ja) * | 2010-06-22 | 2015-02-04 | 富士フイルム株式会社 | 撮像装置及び撮像方法 |
| JP5751766B2 (ja) * | 2010-07-07 | 2015-07-22 | キヤノン株式会社 | 固体撮像装置および撮像システム |
| WO2012014553A1 (ja) * | 2010-07-28 | 2012-02-02 | 富士フイルム株式会社 | 撮像装置及び撮像方法 |
| US8381976B2 (en) * | 2010-08-10 | 2013-02-26 | Honeywell International Inc. | System and method for object metrology |
| US8687174B2 (en) * | 2010-08-11 | 2014-04-01 | Samsung Electronics Co., Ltd. | Unit pixel, photo-detection device and method of measuring a distance using the same |
| KR101697519B1 (ko) | 2010-09-08 | 2017-01-19 | 삼성전자주식회사 | 깊이 센싱 장치 및 방법 |
| US8548270B2 (en) | 2010-10-04 | 2013-10-01 | Microsoft Corporation | Time-of-flight depth imaging |
| KR101925137B1 (ko) | 2010-10-29 | 2018-12-06 | 삼성전자주식회사 | 전기 신호를 이용하여 선택적으로 가시광선과 적외선을 투과하는 필터 |
| US8542348B2 (en) * | 2010-11-03 | 2013-09-24 | Rockwell Automation Technologies, Inc. | Color sensor insensitive to distance variations |
| EP2453252B1 (de) * | 2010-11-15 | 2015-06-10 | Cedes AG | Energiespar-3D-sensor |
| EP2466560A1 (en) * | 2010-12-20 | 2012-06-20 | Axis AB | Method and system for monitoring the accessibility of an emergency exit |
| KR101887099B1 (ko) * | 2010-12-29 | 2018-08-09 | 삼성전자주식회사 | 이미지 처리 시스템 및 이미지 처리 방법 |
| US9076706B2 (en) | 2011-01-07 | 2015-07-07 | Samsung Electronics Co., Ltd. | Image sensor based on depth pixel structure |
| US8742309B2 (en) | 2011-01-28 | 2014-06-03 | Aptina Imaging Corporation | Imagers with depth sensing capabilities |
| CN103270757B (zh) * | 2011-03-11 | 2015-07-22 | 富士胶片株式会社 | 图像传感装置和控制其操作的方法 |
| KR20120105169A (ko) * | 2011-03-15 | 2012-09-25 | 삼성전자주식회사 | 복수의 거리 픽셀들을 포함하는 3차원 이미지 센서의 구동 방법 |
| KR101305885B1 (ko) | 2011-06-24 | 2013-09-06 | 엘지이노텍 주식회사 | 픽셀, 픽셀 어레이, 이를 포함하는 이미지센서 및 그 구동방법 |
| KR101823347B1 (ko) | 2011-07-08 | 2018-02-01 | 삼성전자주식회사 | 센서와 이를 포함하는 데이터 처리 시스템 |
| KR101869371B1 (ko) * | 2011-07-21 | 2018-06-21 | 삼성전자주식회사 | 거리 측정 방법 및 이를 수행하는 3차원 이미지 센서 |
| KR20130011692A (ko) * | 2011-07-22 | 2013-01-30 | 삼성전자주식회사 | 깊이 영상과 컬러 영상을 획득하는 픽셀 구조를 가진 이미지 센서 |
| KR20130015915A (ko) | 2011-08-05 | 2013-02-14 | 에스케이하이닉스 주식회사 | 이미지 센서 |
| US10015471B2 (en) | 2011-08-12 | 2018-07-03 | Semiconductor Components Industries, Llc | Asymmetric angular response pixels for single sensor stereo |
| KR101709282B1 (ko) | 2011-11-15 | 2017-02-24 | 삼성전자주식회사 | 이미지 센서, 이의 동작 방법, 및 이를 포함하는 장치들 |
| KR101334099B1 (ko) * | 2011-11-17 | 2013-11-29 | (주)실리콘화일 | 이중 감지 기능을 가지는 기판 적층형 이미지 센서 |
| US9294700B2 (en) * | 2011-12-27 | 2016-03-22 | Sony Corporation | Imaging element, imaging device, electronic device, and imaging method |
| US8642938B2 (en) * | 2012-01-13 | 2014-02-04 | Omnivision Technologies, Inc. | Shared time of flight pixel |
| EP2624172A1 (en) * | 2012-02-06 | 2013-08-07 | STMicroelectronics (Rousset) SAS | Presence detection device |
| US9554115B2 (en) | 2012-02-27 | 2017-01-24 | Semiconductor Components Industries, Llc | Imaging pixels with depth sensing capabilities |
| US8686367B2 (en) * | 2012-03-01 | 2014-04-01 | Omnivision Technologies, Inc. | Circuit configuration and method for time of flight sensor |
| KR20140009774A (ko) * | 2012-07-13 | 2014-01-23 | 삼성전자주식회사 | 3d 이미지 센서 및 이를 포함하는 시스템 |
| US8988598B2 (en) * | 2012-09-14 | 2015-03-24 | Samsung Electronics Co., Ltd. | Methods of controlling image sensors using modified rolling shutter methods to inhibit image over-saturation |
| KR101938648B1 (ko) | 2012-10-23 | 2019-01-15 | 삼성전자주식회사 | 이미지 센서를 포함하는 모바일 기기, 이미지 센서의 구동 방법 및 모바일 기기의 구동 방법 |
| KR101932587B1 (ko) | 2012-11-20 | 2018-12-26 | 삼성전자주식회사 | 컬러-깊이 디모자이킹 영상 처리 장치 및 방법 |
| KR102070778B1 (ko) | 2012-11-23 | 2020-03-02 | 엘지전자 주식회사 | Rgb-ir 센서 및 이를 이용한 3차원 영상 획득 방법 및 장치 |
| KR102007279B1 (ko) | 2013-02-08 | 2019-08-05 | 삼성전자주식회사 | 3차원 이미지 센서의 거리 픽셀, 이를 포함하는 3차원 이미지 센서 및 3차원 이미지 센서의 거리 픽셀의 구동 방법 |
| US20140347442A1 (en) * | 2013-05-23 | 2014-11-27 | Yibing M. WANG | Rgbz pixel arrays, imaging devices, controllers & methods |
| US9247109B2 (en) | 2013-03-15 | 2016-01-26 | Samsung Electronics Co., Ltd. | Performing spatial and temporal image contrast detection in pixel array |
| WO2014156018A1 (ja) * | 2013-03-29 | 2014-10-02 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 推定装置、推定方法、集積回路およびプログラム |
| JP6442710B2 (ja) * | 2013-07-23 | 2018-12-26 | パナソニックIpマネジメント株式会社 | 固体撮像装置、撮像装置及びその駆動方法 |
| US9182490B2 (en) | 2013-11-27 | 2015-11-10 | Semiconductor Components Industries, Llc | Video and 3D time-of-flight image sensors |
| KR102153045B1 (ko) | 2013-12-04 | 2020-09-07 | 삼성전자주식회사 | 파장 분리 소자 및 이를 포함하는 3차원 영상 획득 장치 |
| CN103796001B (zh) * | 2014-01-10 | 2015-07-29 | 深圳奥比中光科技有限公司 | 一种同步获取深度及色彩信息的方法及装置 |
| US9491442B2 (en) | 2014-04-28 | 2016-11-08 | Samsung Electronics Co., Ltd. | Image processing device and mobile computing device having the same |
| US9940527B2 (en) * | 2014-07-28 | 2018-04-10 | Hyundai Mobis Co., Ltd. | Driving assist system for vehicle and method thereof |
| KR20160025729A (ko) * | 2014-08-28 | 2016-03-09 | 에스케이하이닉스 주식회사 | 깊이 검출 픽셀을 구비한 이미지 센서 및 이를 이용한 깊이 정보 생성 방법 |
| US12401911B2 (en) | 2014-11-07 | 2025-08-26 | Duelight Llc | Systems and methods for generating a high-dynamic range (HDR) pixel stream |
| US12401912B2 (en) | 2014-11-17 | 2025-08-26 | Duelight Llc | System and method for generating a digital image |
| US9627424B2 (en) * | 2014-11-19 | 2017-04-18 | Silicon Laboratories Inc. | Photodiodes for ambient light sensing and proximity sensing |
| GB201421512D0 (en) | 2014-12-03 | 2015-01-14 | Melexis Technologies Nv | A semiconductor pixel unit for simultaneously sensing visible light and near-infrared light, and a semiconductor sensor comprising same |
| US20160182846A1 (en) * | 2014-12-22 | 2016-06-23 | Google Inc. | Monolithically integrated rgb pixel array and z pixel array |
| US9741755B2 (en) | 2014-12-22 | 2017-08-22 | Google Inc. | Physical layout and structure of RGBZ pixel cell unit for RGBZ image sensor |
| US9425233B2 (en) * | 2014-12-22 | 2016-08-23 | Google Inc. | RGBZ pixel cell unit for an RGBZ image sensor |
| US9591247B2 (en) | 2014-12-22 | 2017-03-07 | Google Inc. | Image sensor having an extended dynamic range upper limit |
| US9871065B2 (en) * | 2014-12-22 | 2018-01-16 | Google Inc. | RGBZ pixel unit cell with first and second Z transfer gates |
| TWI585726B (zh) * | 2015-03-25 | 2017-06-01 | 鴻海精密工業股份有限公司 | 畫素結構 |
| TWI696278B (zh) | 2015-03-31 | 2020-06-11 | 日商新力股份有限公司 | 影像感測器、攝像裝置及電子機器 |
| CN114420712A (zh) * | 2015-04-14 | 2022-04-29 | 索尼公司 | 光检测装置 |
| US12445736B2 (en) | 2015-05-01 | 2025-10-14 | Duelight Llc | Systems and methods for generating a digital image |
| US9628735B2 (en) * | 2015-06-22 | 2017-04-18 | Omnivision Technologies, Inc. | Imaging systems with single-photon-avalanche-diodes and sensor translation, and associated methods |
| US9921298B2 (en) * | 2015-07-20 | 2018-03-20 | Google Llc | Method and apparatus for increasing the resolution of a time of flight pixel array |
| EP3136528B1 (de) * | 2015-08-31 | 2020-04-22 | Siemens Aktiengesellschaft | Differentialschutzverfahren, differentialschutzeinrichtung und differentialschutzsystem |
| KR102497281B1 (ko) * | 2015-08-31 | 2023-02-08 | 삼성디스플레이 주식회사 | 표시 장치, 헤드 마운트 표시 장치, 및 화상 표시 방법 |
| US10663608B2 (en) * | 2015-09-21 | 2020-05-26 | Shanghai United Imaging Healthcare Co., Ltd. | System and method for calibrating a PET scanner |
| CN105306796A (zh) * | 2015-10-10 | 2016-02-03 | 安霸半导体技术(上海)有限公司 | 具有定期红外照明和全局快门cmos传感器的夜视设备 |
| US10942261B2 (en) | 2015-10-21 | 2021-03-09 | Samsung Electronics Co., Ltd | Apparatus for and method of range sensor based on direct time-of-flight and triangulation |
| CN105611258A (zh) * | 2015-12-18 | 2016-05-25 | 广东欧珀移动通信有限公司 | 图像传感器的成像方法、成像装置和电子装置 |
| JP2017118191A (ja) * | 2015-12-21 | 2017-06-29 | ソニー株式会社 | 撮像素子及びその駆動方法、並びに撮像装置 |
| KR102512729B1 (ko) * | 2015-12-24 | 2023-03-22 | 엘지전자 주식회사 | 야간 영상표시 장치 및 그 영상처리 방법 |
| CN107275359B (zh) * | 2016-04-08 | 2021-08-13 | 乐金显示有限公司 | 有机发光显示装置 |
| WO2017210250A1 (en) * | 2016-05-31 | 2017-12-07 | BAE Systems Imaging Solutions Inc. | Photodetector adapted to provide additional color information |
| JP7014150B2 (ja) * | 2016-06-15 | 2022-02-01 | ソニーグループ株式会社 | 撮影装置、撮影方法、プログラム |
| KR102523377B1 (ko) * | 2016-07-15 | 2023-04-20 | 삼성디스플레이 주식회사 | 유기 발광 표시 장치 및 이를 포함하는 두부 장착 표시 시스템 |
| KR102549621B1 (ko) * | 2016-09-02 | 2023-06-28 | 삼성전자주식회사 | 반도체 장치 |
| FR3056332A1 (fr) * | 2016-09-21 | 2018-03-23 | Stmicroelectronics (Grenoble 2) Sas | Dispositif comportant un capteur d'image 2d et un capteur de profondeur |
| GB2555585A (en) * | 2016-10-31 | 2018-05-09 | Nokia Technologies Oy | Multiple view colour reconstruction |
| CN106657826B (zh) * | 2016-12-08 | 2019-08-13 | 中国科学院上海高等研究院 | 一种单光子雪崩二极管型像素电路 |
| US10616519B2 (en) * | 2016-12-20 | 2020-04-07 | Microsoft Technology Licensing, Llc | Global shutter pixel structures with shared transfer gates |
| US10389957B2 (en) | 2016-12-20 | 2019-08-20 | Microsoft Technology Licensing, Llc | Readout voltage uncertainty compensation in time-of-flight imaging pixels |
| US10271037B2 (en) | 2017-01-20 | 2019-04-23 | Semiconductor Components Industries, Llc | Image sensors with hybrid three-dimensional imaging |
| US10075663B2 (en) | 2017-01-20 | 2018-09-11 | Semiconductor Components Industries, Llc | Phase detection pixels with high speed readout |
| US10527728B2 (en) * | 2017-01-27 | 2020-01-07 | Samsung Electronics Co., Ltd | Apparatus and method for range measurement |
| WO2019014494A1 (en) * | 2017-07-13 | 2019-01-17 | Apple Inc. | EARLY-DELAYED PULSE COUNTING FOR DEPTH SENSORS EMITTING LIGHT |
| US10593712B2 (en) * | 2017-08-23 | 2020-03-17 | Semiconductor Components Industries, Llc | Image sensors with high dynamic range and infrared imaging toroidal pixels |
| EP3451655B1 (en) * | 2017-08-31 | 2020-10-21 | Canon Kabushiki Kaisha | Solid-state image sensor and image capture apparatus |
| KR102016942B1 (ko) | 2017-09-20 | 2019-09-02 | 연세대학교 산학협력단 | 차량용 라이다 센서 및 라이다 센서의 동작 방법 |
| US10580807B2 (en) | 2017-10-24 | 2020-03-03 | Stmicroelectronics, Inc. | Color pixel and range pixel combination unit |
| CN107742631B (zh) * | 2017-10-26 | 2020-02-14 | 京东方科技集团股份有限公司 | 深度摄像器件及制造方法、显示面板及制造方法、装置 |
| US10545224B2 (en) | 2017-12-06 | 2020-01-28 | Samsung Electronics Co., Ltd. | Time-resolving sensor using SPAD + PPD or capacitors in pixel for range measurement |
| CA3083227A1 (en) | 2017-12-13 | 2019-06-20 | Magic Leap, Inc. | Global shutter pixel circuit and method for computer vision applications |
| CN108492157B (zh) * | 2017-12-18 | 2023-04-18 | 上海云拿智能科技有限公司 | 无人售货系统及无人售货方法 |
| KR102643112B1 (ko) * | 2018-03-30 | 2024-02-29 | 삼성전자주식회사 | 전자 디바이스 및 그 제어 방법 |
| KR101965529B1 (ko) * | 2018-04-06 | 2019-04-03 | 한양대학교 산학협력단 | 양자점층을 포함하는 듀얼 이미지 센서 |
| US10942274B2 (en) | 2018-04-11 | 2021-03-09 | Microsoft Technology Licensing, Llc | Time of flight and picture camera |
| CN110603457A (zh) * | 2018-04-12 | 2019-12-20 | 深圳市汇顶科技股份有限公司 | 影像传感系统及电子装置 |
| US10598936B1 (en) * | 2018-04-23 | 2020-03-24 | Facebook Technologies, Llc | Multi-mode active pixel sensor |
| WO2019221799A1 (en) | 2018-05-17 | 2019-11-21 | Hi Llc | Stacked photodetector assemblies |
| US10158038B1 (en) | 2018-05-17 | 2018-12-18 | Hi Llc | Fast-gated photodetector architectures comprising dual voltage sources with a switch configuration |
| US10340408B1 (en) | 2018-05-17 | 2019-07-02 | Hi Llc | Non-invasive wearable brain interface systems including a headgear and a plurality of self-contained photodetector units configured to removably attach to the headgear |
| US10420498B1 (en) | 2018-06-20 | 2019-09-24 | Hi Llc | Spatial and temporal-based diffusive correlation spectroscopy systems and methods |
| US11213206B2 (en) | 2018-07-17 | 2022-01-04 | Hi Llc | Non-invasive measurement systems with single-photon counting camera |
| CN108900772A (zh) * | 2018-07-19 | 2018-11-27 | 维沃移动通信有限公司 | 一种移动终端及图像拍摄方法 |
| CN109001927B (zh) * | 2018-07-24 | 2021-10-01 | 京东方科技集团股份有限公司 | 一种显示面板、显示装置和显示装置的空间定位方法 |
| EP3605606B1 (en) * | 2018-08-03 | 2022-06-15 | ams Sensors Belgium BVBA | Imaging system comprising an infrared light source and an image sensor |
| CN109005326B (zh) * | 2018-08-30 | 2021-03-26 | Oppo广东移动通信有限公司 | 成像装置及电子设备 |
| KR102683411B1 (ko) * | 2018-10-05 | 2024-07-10 | 삼성전자주식회사 | 복조 대비 성능을 향상시키기 위한 픽셀 구조를 포함하는 이미지 센서 및 이미지 처리 시스템 |
| US11435476B2 (en) | 2018-10-12 | 2022-09-06 | Microsoft Technology Licensing, Llc | Time-of-flight RGB-IR image sensor |
| WO2020131148A1 (en) | 2018-12-21 | 2020-06-25 | Hi Llc | Biofeedback for awareness and modulation of mental state using a non-invasive brain interface system and method |
| WO2020190206A1 (en) * | 2019-03-21 | 2020-09-24 | Mit Semiconductor Pte Ltd | Monochrome imaging using multiple wavelengths of light |
| JP7539926B2 (ja) | 2019-05-06 | 2024-08-26 | エイチアイ エルエルシー | 時間相関単一光子計数法向けの光検出器アーキテクチャ |
| WO2020236371A1 (en) | 2019-05-21 | 2020-11-26 | Hi Llc | Photodetector architectures for efficient fast-gating |
| AU2020287839B2 (en) | 2019-06-06 | 2025-04-17 | Hi Llc | Photodetector systems with low-power time-to-digital converter architectures |
| CN110398477B (zh) * | 2019-07-03 | 2022-06-24 | 香港光云科技有限公司 | 材质分类及识别方法 |
| CN110441784B (zh) * | 2019-08-27 | 2025-01-10 | 浙江舜宇光学有限公司 | 深度图像成像系统和方法 |
| CN112461154B (zh) * | 2019-09-09 | 2023-11-10 | 睿镞科技(北京)有限责任公司 | 3d成像方法、装置和深度相机 |
| CN111048540B (zh) * | 2019-11-15 | 2023-07-21 | 西安电子科技大学 | 一种门控式像素单元以及3d图像传感器 |
| US11079515B2 (en) | 2019-12-18 | 2021-08-03 | Microsoft Technology Licensing, Llc | Micro lens time-of-flight sensor having micro lens heights that vary based on image height |
| US12029558B2 (en) | 2020-02-21 | 2024-07-09 | Hi Llc | Time domain-based optical measurement systems and methods configured to measure absolute properties of tissue |
| WO2021167876A1 (en) | 2020-02-21 | 2021-08-26 | Hi Llc | Methods and systems for initiating and conducting a customized computer-enabled brain research study |
| US11950879B2 (en) | 2020-02-21 | 2024-04-09 | Hi Llc | Estimation of source-detector separation in an optical measurement system |
| US11969259B2 (en) | 2020-02-21 | 2024-04-30 | Hi Llc | Detector assemblies for a wearable module of an optical measurement system and including spring-loaded light-receiving members |
| US11096620B1 (en) | 2020-02-21 | 2021-08-24 | Hi Llc | Wearable module assemblies for an optical measurement system |
| US12144653B2 (en) | 2020-02-21 | 2024-11-19 | Hi Llc | Systems, circuits, and methods for reducing common-mode noise in biopotential recordings |
| WO2021167893A1 (en) | 2020-02-21 | 2021-08-26 | Hi Llc | Integrated detector assemblies for a wearable module of an optical measurement system |
| US11883181B2 (en) | 2020-02-21 | 2024-01-30 | Hi Llc | Multimodal wearable measurement systems and methods |
| WO2021167892A1 (en) | 2020-02-21 | 2021-08-26 | Hi Llc | Wearable devices and wearable assemblies with adjustable positioning for use in an optical measurement system |
| WO2021188489A1 (en) | 2020-03-20 | 2021-09-23 | Hi Llc | High density optical measurement systems with minimal number of light sources |
| US11819311B2 (en) | 2020-03-20 | 2023-11-21 | Hi Llc | Maintaining consistent photodetector sensitivity in an optical measurement system |
| US11877825B2 (en) | 2020-03-20 | 2024-01-23 | Hi Llc | Device enumeration in an optical measurement system |
| WO2021188486A1 (en) | 2020-03-20 | 2021-09-23 | Hi Llc | Phase lock loop circuit based adjustment of a measurement time window in an optical measurement system |
| US12138068B2 (en) | 2020-03-20 | 2024-11-12 | Hi Llc | Techniques for characterizing a nonlinearity of a time-to-digital converter in an optical measurement system |
| US11245404B2 (en) | 2020-03-20 | 2022-02-08 | Hi Llc | Phase lock loop circuit based signal generation in an optical measurement system |
| US11857348B2 (en) | 2020-03-20 | 2024-01-02 | Hi Llc | Techniques for determining a timing uncertainty of a component of an optical measurement system |
| WO2021188496A1 (en) | 2020-03-20 | 2021-09-23 | Hi Llc | Photodetector calibration of an optical measurement system |
| US12085789B2 (en) | 2020-03-20 | 2024-09-10 | Hi Llc | Bias voltage generation in an optical measurement system |
| WO2021188487A1 (en) | 2020-03-20 | 2021-09-23 | Hi Llc | Temporal resolution control for temporal point spread function generation in an optical measurement system |
| US11864867B2 (en) | 2020-03-20 | 2024-01-09 | Hi Llc | Control circuit for a light source in an optical measurement system by applying voltage with a first polarity to start an emission of a light pulse and applying voltage with a second polarity to stop the emission of the light pulse |
| US12059262B2 (en) | 2020-03-20 | 2024-08-13 | Hi Llc | Maintaining consistent photodetector sensitivity in an optical measurement system |
| US11443447B2 (en) | 2020-04-17 | 2022-09-13 | Samsung Electronics Co., Ltd. | Three-dimensional camera system |
| US12059270B2 (en) | 2020-04-24 | 2024-08-13 | Hi Llc | Systems and methods for noise removal in an optical measurement system |
| CN111584673A (zh) * | 2020-05-22 | 2020-08-25 | 成都天马微电子有限公司 | 传感器、传感器的制造方法及电子设备 |
| US11941857B2 (en) | 2020-05-26 | 2024-03-26 | Hi Llc | Systems and methods for data representation in an optical measurement system |
| CN113869096B (zh) * | 2020-06-30 | 2024-11-29 | 敦泰电子股份有限公司 | 指纹像素单元、指纹显示设备及驱动其之集成电路及方法 |
| TWI773133B (zh) * | 2020-07-10 | 2022-08-01 | 大陸商廣州印芯半導體技術有限公司 | 測距裝置以及測距方法 |
| WO2022035626A1 (en) | 2020-08-11 | 2022-02-17 | Hi Llc | Maintaining consistent photodetector sensitivity in an optical measurement system |
| US11789533B2 (en) | 2020-09-22 | 2023-10-17 | Hi Llc | Synchronization between brain interface system and extended reality system |
| US12356740B2 (en) | 2020-09-25 | 2025-07-08 | Apple Inc. | Transistor integration with stacked single-photon avalanche diode (SPAD) pixel arrays |
| TW202213978A (zh) * | 2020-09-28 | 2022-04-01 | 大陸商廣州印芯半導體技術有限公司 | 影像感測裝置以及影像感測方法 |
| GB2600958B (en) | 2020-11-12 | 2023-10-25 | X Fab Global Services Gmbh | Semiconductor imaging apparatus and method |
| US11954877B2 (en) * | 2020-12-08 | 2024-04-09 | Zoox, Inc. | Depth dependent pixel filtering |
| WO2022150155A1 (en) | 2021-01-06 | 2022-07-14 | Hi Llc | Devices, systems, and methods using wearable time domain-based activity tracker |
| KR102887864B1 (ko) * | 2021-01-20 | 2025-11-18 | 에스케이하이닉스 주식회사 | 이미지 센싱 장치 및 그의 동작 방법 |
| CN112887577A (zh) * | 2021-02-08 | 2021-06-01 | 革点科技(深圳)有限公司 | 一种抗环境光的rgb-d三维相机 |
| US12433517B2 (en) | 2021-02-19 | 2025-10-07 | Hi Llc | Devices, systems, and methods for calibrating an optical measurement device |
| WO2022182528A1 (en) | 2021-02-26 | 2022-09-01 | Hi Llc | Systems and methods for calibration of an optical measurement system |
| WO2022182526A1 (en) | 2021-02-26 | 2022-09-01 | Hi Llc | Brain activity tracking during electronic gaming |
| KR20220141624A (ko) * | 2021-04-13 | 2022-10-20 | 에스케이하이닉스 주식회사 | 이미지 센싱 장치 |
| US11543885B2 (en) | 2021-05-26 | 2023-01-03 | Hi Llc | Graphical emotion symbol determination based on brain measurement data for use during an electronic messaging session |
| US12235154B2 (en) | 2021-06-15 | 2025-02-25 | Hi Llc | Maintaining consistent photodetector sensitivity in an optical measurement system |
| US12294011B2 (en) | 2021-07-28 | 2025-05-06 | Magvision Semiconductor (Beijing) Inc. | Image sensor pixel with deep trench isolation structure |
| US12078531B2 (en) | 2021-07-28 | 2024-09-03 | Hi Llc | Devices, systems, and methods for calibrating an optical measurement device |
| US12069391B2 (en) | 2021-07-29 | 2024-08-20 | Omnivision Technologies, Inc. | Readout architectures for dark current reduction in indirect time-of-flight sensors |
| US11658201B2 (en) | 2021-08-25 | 2023-05-23 | Silead Inc. | Dual conversion gain image sensor pixels |
| WO2023180021A1 (en) * | 2022-03-21 | 2023-09-28 | Sony Semiconductor Solutions Corporation | Time-of-flight system and method |
| CN117221686B (zh) * | 2022-05-30 | 2025-03-18 | 华为技术有限公司 | 一种图像传感器的像素和图像传感器 |
| US12502079B2 (en) | 2022-11-17 | 2025-12-23 | Hi Llc | Instrument response function monitor on an optical measurement device |
| KR20240145268A (ko) | 2023-03-27 | 2024-10-07 | 삼성전자주식회사 | 플로팅 확산 영역을 공유하는 픽셀들의 듀얼 컨버전 게인 동작을 최적화하기 위한 픽셀 어레이 및 이를 포함하는 이미지 센서 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000196961A (ja) * | 1998-12-28 | 2000-07-14 | Canon Inc | 撮像装置 |
| JP2003169251A (ja) * | 2001-09-20 | 2003-06-13 | Sony Corp | 固体撮像装置及びその制御方法 |
| JP2003324751A (ja) * | 2002-05-07 | 2003-11-14 | Toshiba Corp | 情報入力装置 |
| JP2005175391A (ja) * | 2003-12-15 | 2005-06-30 | Toshiba Corp | 固体撮像装置およびそれを利用した撮像システム |
| JP2008219370A (ja) * | 2007-03-02 | 2008-09-18 | Canon Inc | 撮像装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06204445A (ja) | 1993-01-01 | 1994-07-22 | Canon Inc | 光センサ及びそれを有する画像情報処理装置 |
| AU5646299A (en) | 1999-09-08 | 2001-04-10 | 3Dv Systems Ltd. | 3d imaging system |
| JP2001337166A (ja) * | 2000-05-26 | 2001-12-07 | Minolta Co Ltd | 3次元入力方法および3次元入力装置 |
| JP4453189B2 (ja) | 2000-10-31 | 2010-04-21 | 株式会社豊田中央研究所 | 撮像装置 |
| WO2002049366A1 (en) | 2000-12-14 | 2002-06-20 | 3Dv Systems, Ltd. | 3d camera |
| EP1265291A1 (fr) * | 2001-06-08 | 2002-12-11 | EM Microelectronic-Marin SA | Capteur d'image CMOS et procédé permettant d'opérer un capteur d'image CMOS avec une dynamique accrue |
| KR100454447B1 (ko) | 2002-02-07 | 2004-10-28 | 주식회사 네오콤 | 일체형 ccd카메라 |
| US6946715B2 (en) * | 2003-02-19 | 2005-09-20 | Micron Technology, Inc. | CMOS image sensor and method of fabrication |
| US20050133879A1 (en) * | 2003-04-07 | 2005-06-23 | Takumi Yamaguti | Solid-state imaging device, signal processing device, camera, and spectral device |
| US20040256561A1 (en) * | 2003-06-17 | 2004-12-23 | Allyson Beuhler | Wide band light sensing pixel array |
| JP3906202B2 (ja) * | 2003-12-15 | 2007-04-18 | 株式会社東芝 | 固体撮像装置およびそれを利用した撮像システム |
| JP4665422B2 (ja) * | 2004-04-02 | 2011-04-06 | ソニー株式会社 | 撮像装置 |
| JP2005309072A (ja) | 2004-04-21 | 2005-11-04 | Fujinon Corp | 可視光・赤外光撮影用アダプター |
| JP2006067194A (ja) | 2004-08-26 | 2006-03-09 | Hitachi Kokusai Electric Inc | 固体撮像装置 |
| US20060065811A1 (en) * | 2004-09-27 | 2006-03-30 | Hongil Yoon | Wide dynamic range CMOS image sensor having controllabale photo-response characteristic and control method thereof |
| JP4882297B2 (ja) | 2004-12-10 | 2012-02-22 | ソニー株式会社 | 物理情報取得装置、半導体装置の製造方法 |
| KR100598015B1 (ko) * | 2005-02-07 | 2006-07-06 | 삼성전자주식회사 | 공유 구조 상보성 금속 산화막 반도체 액티브 픽셀 센서어레이의 레이 아웃 |
| US7262402B2 (en) | 2005-02-14 | 2007-08-28 | Ecole Polytechnique Federal De Lausanne | Integrated imager circuit comprising a monolithic array of single photon avalanche diodes |
| JP4997794B2 (ja) | 2006-03-08 | 2012-08-08 | ソニー株式会社 | 固体撮像素子 |
| US7638852B2 (en) * | 2006-05-09 | 2009-12-29 | Taiwan Semiconductor Manufacturing Company, Ltd. | Method of making wafer structure for backside illuminated color image sensor |
| JP2007311447A (ja) | 2006-05-17 | 2007-11-29 | Sanyo Electric Co Ltd | 光電変換装置 |
| WO2007140602A1 (en) * | 2006-06-07 | 2007-12-13 | Polyvalor, Société En Commandite | Color image sensor |
| KR20080029051A (ko) | 2006-09-28 | 2008-04-03 | 엠텍비젼 주식회사 | 이미지 센서를 구비한 장치 및 영상 획득 방법 |
| KR100821469B1 (ko) * | 2006-10-13 | 2008-04-11 | 매그나칩 반도체 유한회사 | 개선된 컬러 크로스토크를 갖는 소형 cmos 이미지 센서및 그 제조 방법 |
| US7935560B2 (en) * | 2007-09-06 | 2011-05-03 | International Business Machines Corporation | Imagers having electrically active optical elements |
| US8456517B2 (en) * | 2008-07-09 | 2013-06-04 | Primesense Ltd. | Integrated processor for 3D mapping |
| US8717416B2 (en) * | 2008-09-30 | 2014-05-06 | Texas Instruments Incorporated | 3D camera using flash with structured light |
-
2008
- 2008-07-25 KR KR1020080072992A patent/KR101467509B1/ko active Active
-
2009
- 2009-07-16 EP EP09165648A patent/EP2148514A1/en not_active Ceased
- 2009-07-17 CN CN2009101403649A patent/CN101635860B/zh active Active
- 2009-07-17 CN CN201310277025.1A patent/CN103369339B/zh active Active
- 2009-07-22 US US12/458,788 patent/US8344306B2/en active Active
- 2009-07-23 JP JP2009171682A patent/JP5599170B2/ja active Active
-
2012
- 2012-12-28 US US13/729,880 patent/US8633431B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000196961A (ja) * | 1998-12-28 | 2000-07-14 | Canon Inc | 撮像装置 |
| JP2003169251A (ja) * | 2001-09-20 | 2003-06-13 | Sony Corp | 固体撮像装置及びその制御方法 |
| JP2003324751A (ja) * | 2002-05-07 | 2003-11-14 | Toshiba Corp | 情報入力装置 |
| JP2005175391A (ja) * | 2003-12-15 | 2005-06-30 | Toshiba Corp | 固体撮像装置およびそれを利用した撮像システム |
| JP2008219370A (ja) * | 2007-03-02 | 2008-09-18 | Canon Inc | 撮像装置 |
Cited By (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012216692A (ja) * | 2011-03-31 | 2012-11-08 | Honda Motor Co Ltd | 単位画素及び固体撮像装置並びに単位画素の信号加算方法 |
| US9018573B2 (en) | 2011-03-31 | 2015-04-28 | Honda Motor Co., Ltd. | Solid-state image sensing device with a change-over switch |
| US9054014B2 (en) | 2011-03-31 | 2015-06-09 | Honda Motor Co., Ltd. | Unit pixel for accurately removing reset noise, solid-state image sensing device, and method for summing unit pixel signals |
| JP2013068606A (ja) * | 2011-08-19 | 2013-04-18 | Semiconductor Energy Lab Co Ltd | 半導体装置の駆動方法 |
| WO2013099537A1 (en) * | 2011-12-26 | 2013-07-04 | Semiconductor Energy Laboratory Co., Ltd. | Motion recognition device |
| US9264693B2 (en) | 2011-12-26 | 2016-02-16 | Semiconductor Energy Laboratory Co., Ltd. | Motion recognition device |
| US11558572B2 (en) | 2012-02-17 | 2023-01-17 | Canon Kabushiki Kaisha | Photoelectric conversion apparatus and image pickup system |
| JP2013217911A (ja) * | 2012-03-09 | 2013-10-24 | Semiconductor Energy Lab Co Ltd | 半導体装置の駆動方法 |
| US9082676B2 (en) | 2012-03-09 | 2015-07-14 | Semiconductor Energy Laboratory Co., Ltd. | Method for driving semiconductor device |
| WO2013133143A1 (en) * | 2012-03-09 | 2013-09-12 | Semiconductor Energy Laboratory Co., Ltd. | Method for driving semiconductor device |
| WO2014122714A1 (ja) * | 2013-02-07 | 2014-08-14 | パナソニック株式会社 | 撮像装置及びその駆動方法 |
| JPWO2014122714A1 (ja) * | 2013-02-07 | 2017-01-26 | パナソニックIpマネジメント株式会社 | 撮像装置及びその駆動方法 |
| US10687002B2 (en) | 2013-02-07 | 2020-06-16 | Panasonic Intellectual Property Management Co., Ltd. | Image-capturing device and drive method therefor |
| US10187591B2 (en) | 2013-02-07 | 2019-01-22 | Panasonic Intellectual Property Management Co., Ltd. | Image-capturing device and drive method therefor |
| US9455289B2 (en) | 2013-05-10 | 2016-09-27 | Canon Kabushiki Kaisha | Solid-state image sensor and camera |
| US9978792B2 (en) | 2013-05-10 | 2018-05-22 | Canon Kabushiki Kaisha | Solid-state image sensor and camera which can detect visible light and infrared light at a high S/N ratio |
| US10475833B2 (en) | 2013-05-10 | 2019-11-12 | Canon Kabushiki Kaisha | Solid-state image sensor and camera which can detect visible light and infrared light at a high S/N ratio |
| US10690484B2 (en) | 2014-01-29 | 2020-06-23 | Lg Innotek Co., Ltd. | Depth information extracting device and method |
| KR102400992B1 (ko) | 2014-01-29 | 2022-05-23 | 엘지이노텍 주식회사 | 깊이 정보 추출 장치 및 방법 |
| KR20210090134A (ko) * | 2014-01-29 | 2021-07-19 | 엘지이노텍 주식회사 | 깊이 정보 추출 장치 및 방법 |
| KR102277309B1 (ko) * | 2014-01-29 | 2021-07-14 | 엘지이노텍 주식회사 | 깊이 정보 추출 장치 및 방법 |
| KR20150090778A (ko) * | 2014-01-29 | 2015-08-06 | 엘지이노텍 주식회사 | 깊이 정보 추출 장치 및 방법 |
| JP2017506740A (ja) * | 2014-01-29 | 2017-03-09 | エルジー イノテック カンパニー リミテッド | 深さ情報抽出装置および方法 |
| KR102158212B1 (ko) | 2014-02-05 | 2020-09-22 | 엘지전자 주식회사 | 입체적 형상을 감지하기 위한 카메라 및 그것의 제어 방법 |
| KR20150092612A (ko) * | 2014-02-05 | 2015-08-13 | 엘지전자 주식회사 | 입체적 형상을 감지하기 위한 카메라 및 그것의 제어 방법 |
| JP2015192341A (ja) * | 2014-03-28 | 2015-11-02 | キヤノン株式会社 | 撮像システム |
| US9729809B2 (en) | 2014-07-11 | 2017-08-08 | Semiconductor Energy Laboratory Co., Ltd. | Semiconductor device and driving method of semiconductor device or electronic device |
| US10516842B2 (en) | 2014-07-11 | 2019-12-24 | Semiconductor Energy Laboratory Co., Ltd. | Driving method of semiconductor device and electronic device |
| US11223789B2 (en) | 2014-07-11 | 2022-01-11 | Semiconductor Energy Laboratory Co., Ltd. | Driving method of semiconductor device and electronic device |
| US11882376B2 (en) | 2014-07-11 | 2024-01-23 | Semiconductor Energy Laboratory Co., Ltd. | Driving method of semiconductor device and electronic device |
| US12401924B2 (en) | 2014-07-11 | 2025-08-26 | Semiconductor Energy Laboratory Co., Ltd. | Driving method of semiconductor device and electronic device |
| US10838066B2 (en) | 2015-12-08 | 2020-11-17 | Panasonic Intellectual Property Management Co., Ltd. | Solid-state imaging device, distance measurement device, and distance measurement method |
| WO2017098725A1 (ja) * | 2015-12-08 | 2017-06-15 | パナソニックIpマネジメント株式会社 | 固体撮像装置、距離測定装置および距離測定方法 |
| JPWO2017098725A1 (ja) * | 2015-12-08 | 2018-09-20 | パナソニックIpマネジメント株式会社 | 固体撮像装置、距離測定装置および距離測定方法 |
| US10401217B2 (en) | 2016-08-30 | 2019-09-03 | Samsung Electronics Co., Ltd. | Data output device |
| US11604092B2 (en) | 2016-08-30 | 2023-03-14 | Samsung Electronics Co., Ltd. | Data output device |
| US12061115B2 (en) | 2016-08-30 | 2024-08-13 | Samsung Electronics Co., Ltd. | Data output device |
| US11125615B2 (en) | 2016-08-30 | 2021-09-21 | Samsung Electronics Co., Ltd. | Data output device |
| US10612973B2 (en) | 2017-06-22 | 2020-04-07 | Denso Corporation | Light detection device |
| JP2019047486A (ja) * | 2017-08-31 | 2019-03-22 | キヤノン株式会社 | 固体撮像素子及び撮像装置 |
| US11758111B2 (en) | 2017-10-27 | 2023-09-12 | Baidu Usa Llc | 3D lidar system using a dichroic mirror for autonomous driving vehicles |
| JP2019109219A (ja) * | 2017-10-27 | 2019-07-04 | バイドゥ ユーエスエー エルエルシーBaidu USA LLC | ダイクロイックミラーを使用する、自律走行車のための3d−lidarシステム |
| US11658193B2 (en) | 2018-01-23 | 2023-05-23 | Samsung Electronics Co., Ltd. | Image sensor |
| CN110072069A (zh) * | 2018-01-23 | 2019-07-30 | 三星电子株式会社 | 图像传感器 |
| CN110072069B (zh) * | 2018-01-23 | 2023-06-20 | 三星电子株式会社 | 图像传感器 |
| KR20190089701A (ko) * | 2018-01-23 | 2019-07-31 | 삼성전자주식회사 | 이미지 센서 |
| KR102497658B1 (ko) * | 2018-01-23 | 2023-02-13 | 삼성전자주식회사 | 이미지 센서 |
| JP7627793B2 (ja) | 2018-07-16 | 2025-02-06 | ギガジョット テクノロジー,インコーポレイテッド | 非アバランシェ光検出器を有する高感度深度センサ |
| JP2024062980A (ja) * | 2018-07-16 | 2024-05-10 | ギガジョット テクノロジー,インコーポレイテッド | 非アバランシェ光検出器を有する高感度深度センサ |
| US12072237B2 (en) | 2018-08-09 | 2024-08-27 | Ouster, Inc. | Multispectral ranging and imaging systems |
| JP7426377B2 (ja) | 2018-08-09 | 2024-02-01 | アウスター インコーポレイテッド | マルチスペクトル測距/撮像センサアレイ及びシステム |
| US11733092B2 (en) | 2018-08-09 | 2023-08-22 | Ouster, Inc. | Channel-specific micro-optics for optical arrays |
| US12320696B2 (en) | 2018-08-09 | 2025-06-03 | Ouster, Inc. | Multispectral ranging and imaging systems |
| JP2021534378A (ja) * | 2018-08-09 | 2021-12-09 | アウスター インコーポレイテッド | マルチスペクトル測距/撮像センサアレイ及びシステム |
| JP2022522952A (ja) * | 2019-01-15 | 2022-04-21 | エコール ポリテクニーク フェデラル デ ローザンヌ (イーピーエフエル) | 飛行時間型装置および3d光学検出器 |
| US12481038B2 (en) | 2019-01-15 | 2025-11-25 | Ecole polytechnique fédérale de Lausanne (EPFL) | Time-of-flight device and 3D optical detector |
| KR20200108735A (ko) * | 2019-03-11 | 2020-09-21 | 엘지이노텍 주식회사 | 카메라 장치 |
| KR102736067B1 (ko) | 2019-03-11 | 2024-12-02 | 엘지이노텍 주식회사 | 카메라 장치 |
| WO2023145782A1 (ja) | 2022-01-28 | 2023-08-03 | 国立大学法人静岡大学 | 固体撮像装置 |
| WO2024071095A1 (ja) * | 2022-09-27 | 2024-04-04 | ヌヴォトンテクノロジージャパン株式会社 | 撮像装置、測距装置及び撮像装置の製造方法 |
| WO2024071088A1 (ja) * | 2022-09-27 | 2024-04-04 | ヌヴォトンテクノロジージャパン株式会社 | 撮像装置、測距装置及び撮像装置の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5599170B2 (ja) | 2014-10-01 |
| US20100020209A1 (en) | 2010-01-28 |
| EP2148514A1 (en) | 2010-01-27 |
| KR20100011676A (ko) | 2010-02-03 |
| US8633431B2 (en) | 2014-01-21 |
| US8344306B2 (en) | 2013-01-01 |
| CN103369339A (zh) | 2013-10-23 |
| CN103369339B (zh) | 2016-12-28 |
| CN101635860B (zh) | 2013-11-20 |
| CN101635860A (zh) | 2010-01-27 |
| US20130120623A1 (en) | 2013-05-16 |
| KR101467509B1 (ko) | 2014-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5599170B2 (ja) | イメージング装置及びイメージング方法 | |
| US12166062B2 (en) | Solid-state imaging device, driving method therefor, and electronic apparatus | |
| US10475833B2 (en) | Solid-state image sensor and camera which can detect visible light and infrared light at a high S/N ratio | |
| US9608027B2 (en) | Stacked embedded SPAD image sensor for attached 3D information | |
| JP4630901B2 (ja) | 杆体および錐体応答センサ | |
| KR101605046B1 (ko) | 싱글 게이트 픽셀 및 싱글 게이트 픽셀 동작 방법 | |
| US8785982B2 (en) | Pixel for depth sensor and image sensor including the pixel | |
| US9544513B2 (en) | Image sensor having pixel architecture for capturing depth image and color image | |
| US8446499B2 (en) | Image capturing apparatus, image capturing system, and processing method | |
| US20190230302A1 (en) | Image sensor | |
| JP6362511B2 (ja) | 撮像装置及びその制御方法 | |
| KR101246141B1 (ko) | 광역 동적범위를 가지는 이미지 센서의 화소 회로 및 그 구동 방법 | |
| US20150296157A1 (en) | Image sensing device | |
| JP2026004570A (ja) | 撮像素子 | |
| US8059175B2 (en) | Image capture device and method of operating the same | |
| US20210152770A1 (en) | Systems and methods for generating time trace information | |
| HK1224820A1 (en) | Pixel array and image sensing system | |
| HK1224820B (zh) | 像素阵列及图像感测系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120330 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121129 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140805 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140812 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5599170 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |