JP2010014712A - モーションキャプチャー装置及びモーションキャプチャー方法 - Google Patents
モーションキャプチャー装置及びモーションキャプチャー方法 Download PDFInfo
- Publication number
- JP2010014712A JP2010014712A JP2009155856A JP2009155856A JP2010014712A JP 2010014712 A JP2010014712 A JP 2010014712A JP 2009155856 A JP2009155856 A JP 2009155856A JP 2009155856 A JP2009155856 A JP 2009155856A JP 2010014712 A JP2010014712 A JP 2010014712A
- Authority
- JP
- Japan
- Prior art keywords
- motion capture
- measurement sensor
- fuselage
- sensor
- capture device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 title claims abstract description 198
- 238000000034 method Methods 0.000 title claims abstract description 100
- 238000005259 measurement Methods 0.000 claims description 159
- 210000000707 wrist Anatomy 0.000 claims description 27
- 210000003423 ankle Anatomy 0.000 claims description 19
- 230000003542 behavioural effect Effects 0.000 claims description 9
- 210000004197 pelvis Anatomy 0.000 claims description 8
- 210000003127 knee Anatomy 0.000 claims description 7
- 230000001133 acceleration Effects 0.000 claims 2
- 210000001513 elbow Anatomy 0.000 claims 2
- 210000002832 shoulder Anatomy 0.000 claims 2
- 238000013507 mapping Methods 0.000 abstract description 3
- 230000008569 process Effects 0.000 description 46
- 210000002683 foot Anatomy 0.000 description 17
- 238000010586 diagram Methods 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000007429 general method Methods 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 210000004247 hand Anatomy 0.000 description 2
- 210000000629 knee joint Anatomy 0.000 description 2
- 210000002414 leg Anatomy 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 210000003371 toe Anatomy 0.000 description 2
- 210000001113 umbilicus Anatomy 0.000 description 2
- 238000012800 visualization Methods 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 210000002310 elbow joint Anatomy 0.000 description 1
- 230000005021 gait Effects 0.000 description 1
- 210000001624 hip Anatomy 0.000 description 1
- 210000004394 hip joint Anatomy 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000007794 visualization technique Methods 0.000 description 1
Images















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
- G06V40/23—Recognition of whole body movements, e.g. for sport training
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1116—Determining posture transitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor, mobility of a limb
- A61B5/1121—Determining geometric values, e.g. centre of rotation or angular range of movement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/10—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game characterized by input arrangements for converting player-generated signals into game device control signals
- A63F2300/105—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game characterized by input arrangements for converting player-generated signals into game device control signals using inertial sensors, e.g. accelerometers, gyroscopes
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63F—CARD, BOARD, OR ROULETTE GAMES; INDOOR GAMES USING SMALL MOVING PLAYING BODIES; VIDEO GAMES; GAMES NOT OTHERWISE PROVIDED FOR
- A63F2300/00—Features of games using an electronically generated display having two or more dimensions, e.g. on a television screen, showing representations related to the game
- A63F2300/60—Methods for processing data by generating or executing the game program
- A63F2300/66—Methods for processing data by generating or executing the game program for rendering three dimensional images
- A63F2300/6607—Methods for processing data by generating or executing the game program for rendering three dimensional images for animating game characters, e.g. skeleton kinematics
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2218/00—Aspects of pattern recognition specially adapted for signal processing
Abstract
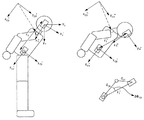
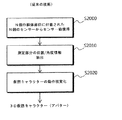
【解決手段】 少数のセンサーを用いて効果的に3D仮想キャラクターのリアルタイム動作を生成する装置及び方法が開示される。より具体的に、本発明の一態様によるモーションキャプチャー方法は、胴体の動作を骨格モデルにマッピングして3次元仮想キャラクターの動作を生成するモーションキャプチャー方法において、胴体に付着される測定センサー及び測定基準位置を提供する基準センサーを用いて、該当部位に対する測定基準位置からの距離及び回転角を測定する段階及び測定された距離及び回転角を用いて、胴体の各部分に対する相対的な回転角及び位置座標を推定する段階を含みうる。
【選択図】 図1
Description
頭及び胴体の回転角を決定するための過程は、図10で図示されたものと同じである。
前記式で、それぞれのk値は一定の加重値を表わし、ψ4及びψ5は足首から測定されたセンサー値を表わす。ψC1値は、センサー座標系1で得られた回転値を全く同じく使うことができるので、前記式を通じて胴体の回転角を推定することが可能である。
頭及び胴体のx軸方向の動き(例えば、前に下げること)は、図12で図示されたように求めることができる。
胴体のy軸に対する回転角θc2及び頭のy軸に対する回転角θc1に対することは、細部過程1−2とその方向のみ異なり、残りは同一であるので、詳しい説明は省略する。
両足の回転角を決定するための過程は、図13で図示されたものと同じである。
両腕の回転角を決定するための過程は、図15に図示されたものと同じである。
まず、ψR3が0より大きいか同じである場合は、図18と同じである。

ψR3が0より小さい場合(例えば、手の甲を外側に回転させる場合)は、図19と同じである。
102 計算モジュール
103 基準センサー
104 測定センサー
105 測定部
106 推定部
107 仮想キャラクター生成部
108 1自由度関節
109 3自由度関節
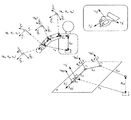
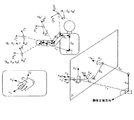
201 回転中心
202 第1関節
203 第2関節
Claims (52)
- 胴体の部分に位置して基準位置までの距離を測定する測定センサーによって、前記基準位置と前記測定センサーとの距離表現及び前記測定センサーの少なくとも1以上の回転角に基づいて、前記測定センサーが位置する前記胴体の部分とは異なる前記胴体の多数部分の回転角を少なくとも1以上含む姿勢情報を推定する推定部を含むことを特徴とするモーションキャプチャー装置。
- 前記胴体の多数部分は、多数の運動自由度を有する前記胴体の第1部分を含み、前記胴体の第2部分に対する前記姿勢情報の推定は、前記第2部分から測定された姿勢情報に基づかないことを特徴とする請求項1に記載のモーションキャプチャー装置。
- 前記測定センサーが位置する前記胴体の部分は、多数の運動自由度を有することを特徴とする請求項2に記載のモーションキャプチャー装置。
- 前記測定センサーと前記基準位置との前記距離表現は、三角形の何れか一つの辺を定義し、前記三角形の他の二辺は、前記胴体の部分の間の距離と定義され、前記推定部は、前記三角形の少なくとも1以上の内角を定義することによって、前記姿勢情報を推定することを特徴とする請求項1に記載のモーションキャプチャー装置。
- 前記推定部は、
前記胴体の多数部分のうち何れか一つの選択可能な位置を表現するために、前記距離表現に基づいて平行四辺形を定義し、前記平行四辺形の各辺は、前記胴体の部分の間の距離として定義されることを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記推定部は、
前記距離表現を半径で有する第1球と前記胴体の部分の間の距離を半径で有する第2球との交差点に基づいて、前記選択可能な位置のうちから何れか一つを前記胴体の多数部分のうち何れか一部分の位置に選択することを特徴とする請求項5に記載のモーションキャプチャー装置。 - 前記推定部は、
前記測定センサーが位置する前記胴体の部分に対する軸と前記胴体の多数部分に対する軸とを平面に投映して、前記胴体の多数部分に対する姿勢情報を推定することを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記胴体の部分に位置し、前記距離表現を測定する測定センサーとをさらに含むことを特徴とする請求項1に記載のモーションキャプチャー装置。
- 基準位置情報を出力する基準センサーをさらに含み、
前記測定センサーは、前記距離表現を測定するために、前記基準センサーの出力を受信することを特徴とする請求項8に記載のモーションキャプチャー装置。 - 前記基準センサーは、
前記基準位置に位置することを特徴とする請求項9に記載のモーションキャプチャー装置。 - 前記基準センサーは、
前記胴体に位置することを特徴とする請求項10に記載のモーションキャプチャー装置。 - 前記基準センサーは、
前記胴体の基準位置部分に位置し、前記胴体の基準位置部分は、前記測定センサーが位置する前記胴体の部分及び前記測定センサーが位置していない前記胴体の多数部分とは異なることを特徴とする請求項11に記載のモーションキャプチャー装置。 - 前記測定センサーは、
それぞれ相異なる前記胴体の部分に位置する少なくとも4個の測定センサーを含み、前記推定部は、前記少なくとも4個の測定センサーを用いて、前記姿勢情報を推定することを特徴とする請求項12に記載のモーションキャプチャー装置。 - それぞれ相異なる前記胴体の部分に位置する少なくとも4個の測定センサーを含む測定センサーをさらに含み、
前記推定部は、前記少なくとも4個の測定センサーを用いて、前記姿勢情報を推定することを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記胴体の部分に位置し、前記距離表現を測定する測定センサーをさらに含み、
前記測定センサーは、測定された慣性情報に基づいて、前記測定センサーが位置した前記胴体の部分に対する位置及び回転角を得る慣性センサーを含むことを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記慣性センサーは、
少なくとも1以上の軸に対する加速度及び角速度を測定し、前記慣性情報は、測定された加速度及び角速度を含むことを特徴とする請求項15に記載のモーションキャプチャー装置。 - 前記姿勢情報は、
前記胴体の多数部分に対する回転角及び位置座標を含み、前記測定センサーは、前記測定センサーが位置する前記胴体の部分に対する姿勢情報を測定することを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記姿勢情報は、
前記胴体をリンク構造を有する骨格モデルとして解析して推定されることを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記リンクの先端地点中で関節運動の中心となる地点が回転中心と定義され、前記推定部は、前記回転中心と前記基準位置との距離を考慮して、前記姿勢情報を推定することを特徴とする請求項18に記載のモーションキャプチャー装置。
- 前記推定部は、
人の行動学的パターンを考慮して関節の回転角度を制限するか、状況による動作面を決定して、前記相対的な回転角及び位置座標を推定することを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記測定センサーは、
前記胴体の頭、手首、及び足首に位置されることを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記測定センサーは、
前記胴体の手首及び足首に隣接した部位にそれぞれ付着されることを特徴とする請求項21に記載のモーションキャプチャー装置。 - 前記基準位置は、
前記胴体の中心部であることを特徴とする請求項1に記載のモーションキャプチャー装置。 - 前記胴体は、
人の胴体であることを特徴とする請求項1に記載のモーションキャプチャー装置。 - 3次元仮想キャラクターの動作を生成するために胴体の運動を骨格モデルにマッピングするモーションキャプチャー方法において、
胴体の部分に位置して基準位置までの距離を測定する測定センサーによって、前記基準位置と前記測定センサーとの距離表現及び前記測定センサーの少なくとも1以上の回転角に基づいて、前記測定センサーが位置する前記胴体の部分とは異なる前記胴体の多数部分の回転角を少なくとも1以上含む姿勢情報を推定する段階を含むことを特徴とするモーションキャプチャー方法。 - 前記胴体の多数部分は、多数の運動自由度を有する前記胴体の第1部分を含み、前記胴体の第2部分に対する前記姿勢情報の推定は、前記第2部分から測定された姿勢情報に基づかないことを特徴とする請求項25に記載のモーションキャプチャー方法。
- 前記測定センサーが位置する前記胴体の部分は、多数の運動自由度を有することを特徴とする請求項26に記載のモーションキャプチャー方法。
- 前記測定センサーと前記基準位置との前記距離表現は、三角形の何れか一つの辺を定義し、前記三角形の他の二辺は、前記胴体の部分の間の距離として定義され、前記推定する段階は、前記三角形の少なくとも1以上の内角を定義することによって、前記姿勢情報を推定することを特徴とする請求項25に記載のモーションキャプチャー方法。
- 前記推定する段階は、
前記胴体の多数部分のうち何れか一つの選択可能な位置を表現するために、前記距離表現に基づいて平行四辺形を定義する段階を含み、前記平行四辺形の各辺は、前記胴体の部分の間の距離として定義されることを特徴とする請求項25に記載のモーションキャプチャー方法。 - 前記推定する段階は、
前記距離表現を半径で有する第1球と前記胴体の部分の間の距離を半径で有する第2球との交差点に基づいて、前記選択可能な位置のうちから何れか一つを前記胴体の多数部分のうち何れか一部分の位置に選択する段階を含むことを特徴とする請求項29に記載のモーションキャプチャー方法。 - 前記推定する段階は、
前記測定センサーが位置する前記胴体の部分に対する軸と前記胴体の多数部分に対する軸とを平面に投映して、前記胴体の多数部分に対する姿勢情報を推定する段階を含むことを特徴とする請求項25に記載のモーションキャプチャー方法。 - 基準センサーが基準位置情報を出力し、前記測定センサーが前記基準センサーの出力を受信して、前記距離表現を測定することを特徴とする請求項25に記載のモーションキャプチャー方法。
- 前記基準センサーは、
前記基準位置に位置することを特徴とする請求項32に記載のモーションキャプチャー方法。 - 前記基準センサーは、
前記胴体に位置することを特徴とする請求項33に記載のモーションキャプチャー方法。 - 前記基準センサーは、
前記胴体の基準位置部分に位置し、前記胴体の基準位置部分は、前記測定センサーが位置する前記胴体の部分及び前記測定センサーが位置していない前記胴体の多数部分とは異なることを特徴とする請求項34に記載のモーションキャプチャー方法。 - 前記測定センサーは、
それぞれ前記胴体の他の部位に位置する少なくとも4個の測定センサーを含み、前記推定する段階は、前記少なくとも4個の測定センサーを用いて、前記姿勢情報を推定することを特徴とする請求項35に記載のモーションキャプチャー方法。 - 前記測定センサーは、それぞれ前記胴体の他の部位に位置する少なくとも4個の測定センサーを含み、前記推定する段階は、前記少なくとも4個の測定センサーを用いて、前記姿勢情報を推定することを特徴とする請求項25に記載のモーションキャプチャー方法。
- 前記姿勢情報を用いて、前記胴体に対応する3次元仮想キャラクターを生成する段階をさらに含むことを特徴とする請求項25に記載のモーションキャプチャー方法。
- 前記姿勢情報は、
前記胴体をリンク構造を有する骨格モデルとして解析して推定されることを特徴とする請求項25に記載のモーションキャプチャー方法。 - 前記リンクの先端地点中で関節運動の中心となる地点が回転中心と定義され、前記推定する段階は、前記回転中心と前記基準位置との距離を考慮して、前記姿勢情報を推定することを特徴とする請求項39に記載のモーションキャプチャー方法。
- 前記回転中心が、前記基準位置である場合、1自由度を有する関節の回転角が3自由度を有する関節の回転角より先に計算されることを特徴とする請求項40に記載のモーションキャプチャー方法。
- 前記回転中心が、前記基準位置ではない場合、1自由度を有する関節の回転角及び回転軸候補を選定し、前記胴体の行動学的パターンが考慮された動作面を設定した後、残りの関節の回転角を計算することを特徴とする請求項40に記載のモーションキャプチャー方法。
- 前記推定する段階は、
人の行動学的パターンを考慮して関節の回転角度を制限するか、状況による動作面を決定して、前記相対的な回転角及び位置座標を推定することを特徴とする請求項25に記載のモーションキャプチャー方法。 - 前記測定センサーは、
前記胴体の頭、手首、及び足首に位置されることを特徴とする請求項25に記載のモーションキャプチャー方法。 - 前記測定センサーは、
前記胴体の手首及び足首に隣接した部位にそれぞれ付着されることを特徴とする請求項44に記載のモーションキャプチャー方法。 - 前記基準位置は、
前記胴体の中心部であることを特徴とする請求項25に記載のモーションキャプチャー方法。 - 請求項25による方法を行うためのコードが記録されたコンピュータが判読可能な記録媒体。
- 多数の測定センサーによって測定された少なくとも1以上の距離表現及び回転角に基づいて、胴体の非−末端部分の回転角を少なくとも1以上含む姿勢情報を推定する推定部を含み、
前記非−末端部分は、両ヒジ、両肩、両ヒザ、及び骨盤のうち少なくとも何れか一つを含み、前記測定センサーは、手首及び/または足首周辺に位置し、
前記測定センサーは、前記測定センサーと基準位置との距離を測定することを特徴とするモーションキャプチャー装置。 - 前記胴体の末端部分に位置し、前記距離表現を測定する測定センサーをさらに含むことを特徴とする請求項48に記載のモーションキャプチャー装置。
- 多数の測定センサーによって測定された少なくとも1以上の距離表現及び回転角に基づいて、胴体の非−末端部分の回転角を少なくとも1以上含む姿勢情報を推定する段階を含み、
前記非−末端部分は、両ヒジ、両肩、両ヒザ、及び骨盤のうち少なくとも何れか一つを含み、前記測定センサーは、手首及び/または足首周辺に位置し、
前記測定センサーは、前記測定センサーと基準位置との距離を測定することを特徴とするモーションキャプチャー方法。 - 前記測定センサーによって、前記距離表現が測定される段階をさらに含むことを特徴とする請求項50に記載のモーションキャプチャー方法。
- 請求項50による方法を行うためのコードが記録されたコンピュータが判読可能な記録媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2008-0062837 | 2008-06-30 | ||
| KR20080062837A KR101483713B1 (ko) | 2008-06-30 | 2008-06-30 | 모션 캡쳐 장치 및 모션 캡쳐 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010014712A true JP2010014712A (ja) | 2010-01-21 |
| JP5657216B2 JP5657216B2 (ja) | 2015-01-21 |
Family
ID=41138610
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009155856A Active JP5657216B2 (ja) | 2008-06-30 | 2009-06-30 | モーションキャプチャー装置及びモーションキャプチャー方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8988438B2 (ja) |
| EP (1) | EP2141632A3 (ja) |
| JP (1) | JP5657216B2 (ja) |
| KR (1) | KR101483713B1 (ja) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013535039A (ja) * | 2010-04-13 | 2013-09-09 | サムスン エレクトロニクス カンパニー リミテッド | 仮想世界処理装置及び方法 |
| JP2013181966A (ja) * | 2012-03-05 | 2013-09-12 | Toyota Central R&D Labs Inc | ダミー計測装置 |
| JP2014509011A (ja) * | 2011-02-18 | 2014-04-10 | マイクロソフト コーポレーション | 動き認識 |
| JP2016198962A (ja) * | 2015-04-10 | 2016-12-01 | 凸版印刷株式会社 | 三次元造形物作成装置 |
| JP2016206081A (ja) * | 2015-04-24 | 2016-12-08 | 株式会社東芝 | 動作推測装置および動作推測方法 |
| JP2017511906A (ja) * | 2014-01-09 | 2017-04-27 | イクセンス・ホールディング・ベー・フェーXsens Holding B.V. | 数を減らした装着センサセットを用いたモーショントラッキング |
| JP2017146116A (ja) * | 2016-02-15 | 2017-08-24 | オムロン株式会社 | 演算装置、演算方法及び演算プログラム |
| JP6257825B1 (ja) * | 2017-05-26 | 2018-01-10 | 株式会社コロプラ | 仮想空間を介して通信するための方法、当該方法をコンピュータに実行させるためのプログラム、および当該プログラムを実行するための情報処理装置 |
| JP2018200671A (ja) * | 2017-05-26 | 2018-12-20 | 株式会社コロプラ | 仮想空間を介して通信するための方法、当該方法をコンピュータに実行させるためのプログラム、および当該プログラムを実行するための情報処理装置 |
| WO2020049847A1 (ja) * | 2018-09-06 | 2020-03-12 | 株式会社ソニー・インタラクティブエンタテインメント | 推定装置、学習装置、推定方法、学習方法及びプログラム |
| JP2020047239A (ja) * | 2018-09-19 | 2020-03-26 | 未來市股▲ふん▼有限公司 | トラッキングシステム及びそのトラッキング方法 |
| JP2020047235A (ja) * | 2018-09-20 | 2020-03-26 | 未來市股▲ふん▼有限公司 | 追跡方法及び追跡方法を使用する追跡システム |
| WO2020070928A1 (ja) * | 2018-10-03 | 2020-04-09 | 株式会社ソニー・インタラクティブエンタテインメント | スケルトンモデル更新装置、スケルトンモデル更新方法及びプログラム |
| JP2020077374A (ja) * | 2018-11-07 | 2020-05-21 | 学校法人法政大学 | 仮想体の動作制御システム、人体拘束治具、及び仮想体の動作制御方法 |
| JP2021174239A (ja) * | 2020-04-24 | 2021-11-01 | グリー株式会社 | コンピュータプログラム、サーバ装置及び方法 |
Families Citing this family (113)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2933185B1 (fr) * | 2008-06-27 | 2017-07-21 | Movea Sa | Systeme et procede de determination d'informations representatives du mouvement d'une chaine articulee |
| KR101483713B1 (ko) * | 2008-06-30 | 2015-01-16 | 삼성전자 주식회사 | 모션 캡쳐 장치 및 모션 캡쳐 방법 |
| US8421854B2 (en) * | 2008-07-24 | 2013-04-16 | Noah Zerkin | System and method for motion capture |
| FR2941805A1 (fr) | 2009-02-02 | 2010-08-06 | Laurent Philippe Nanot | Dispositif pour la visite guidee virtuelle interactive de sites/evenements historiques ou de projets de construction et scenarios d'entrainement |
| WO2013052123A1 (en) * | 2011-10-03 | 2013-04-11 | Centauri Medical Inc. | System and method for analyzing patient orientation, location and movement |
| US10729357B2 (en) | 2010-04-22 | 2020-08-04 | Leaf Healthcare, Inc. | Systems and methods for generating and/or adjusting a repositioning schedule for a person |
| US11278237B2 (en) | 2010-04-22 | 2022-03-22 | Leaf Healthcare, Inc. | Devices, systems, and methods for preventing, detecting, and treating pressure-induced ischemia, pressure ulcers, and other conditions |
| KR101640458B1 (ko) * | 2009-06-25 | 2016-07-18 | 삼성전자주식회사 | 영상 장치 및 컴퓨터 판독 기록매체 |
| US8334842B2 (en) | 2010-01-15 | 2012-12-18 | Microsoft Corporation | Recognizing user intent in motion capture system |
| US20110246123A1 (en) * | 2010-03-30 | 2011-10-06 | Welch Allyn, Inc. | Personal status monitoring |
| US11369309B2 (en) | 2010-04-22 | 2022-06-28 | Leaf Healthcare, Inc. | Systems and methods for managing a position management protocol based on detected inclination angle of a person |
| US10758162B2 (en) | 2010-04-22 | 2020-09-01 | Leaf Healthcare, Inc. | Systems, devices and methods for analyzing a person status based at least on a detected orientation of the person |
| US11272860B2 (en) | 2010-04-22 | 2022-03-15 | Leaf Healthcare, Inc. | Sensor device with a selectively activatable display |
| US11051751B2 (en) | 2010-04-22 | 2021-07-06 | Leaf Healthcare, Inc. | Calibrated systems, devices and methods for preventing, detecting, and treating pressure-induced ischemia, pressure ulcers, and other conditions |
| KR101102778B1 (ko) * | 2010-04-22 | 2012-01-05 | 한국과학기술원 | 리깅 복제를 통한 캐릭터 리깅 자동화 방법 및 장치 |
| US20110279368A1 (en) * | 2010-05-12 | 2011-11-17 | Microsoft Corporation | Inferring user intent to engage a motion capture system |
| US20120094600A1 (en) | 2010-10-19 | 2012-04-19 | Welch Allyn, Inc. | Platform for patient monitoring |
| US8655810B2 (en) | 2010-10-22 | 2014-02-18 | Samsung Electronics Co., Ltd. | Data processing apparatus and method for motion synthesis |
| CN101976451B (zh) * | 2010-11-03 | 2012-10-03 | 北京航空航天大学 | 一种基于加速度传感器的运动控制与动画生成方法 |
| US9357948B2 (en) * | 2010-12-01 | 2016-06-07 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Method and system for determining the values of parameters representative of a movement of at least two limbs of an entity represented in the form of an articulated line |
| JP5118220B2 (ja) * | 2011-02-16 | 2013-01-16 | 株式会社スクウェア・エニックス | 動作モデリング装置及び方法、並びにプログラム |
| US8831794B2 (en) | 2011-05-04 | 2014-09-09 | Qualcomm Incorporated | Gesture recognition via an ad-hoc proximity sensor mesh for remotely controlling objects |
| US20120280902A1 (en) * | 2011-05-05 | 2012-11-08 | Qualcomm Incorporated | Proximity sensor mesh for motion capture |
| US8792869B2 (en) * | 2011-05-18 | 2014-07-29 | Qualcomm Incorporated | Method and apparatus for using proximity sensing for augmented reality gaming |
| KR101214227B1 (ko) | 2011-05-25 | 2012-12-20 | 한국과학기술연구원 | 동작 추적 방법. |
| JP5786463B2 (ja) * | 2011-06-01 | 2015-09-30 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| WO2013070171A1 (en) * | 2011-11-08 | 2013-05-16 | Nanyang Technological University | Method and apparatus for calibrating a motion tracking system |
| US8773429B2 (en) * | 2011-11-15 | 2014-07-08 | Cyberlink Corp. | Method and system of virtual touch in a steroscopic 3D space |
| KR101327995B1 (ko) * | 2012-04-12 | 2013-11-13 | 동국대학교 산학협력단 | 디지털 캐릭터를 이용한 무대 공연을 처리하는 장치 및 방법 |
| KR101338958B1 (ko) * | 2012-05-18 | 2013-12-09 | 한국과학기술원 | 멀티터치 단말기에서 가상물체의 3차원 움직임 조작시스템 및 방법 |
| JP5635161B2 (ja) * | 2012-08-01 | 2014-12-03 | 株式会社スクウェア・エニックス | キャラクタ表示装置 |
| US20140045593A1 (en) * | 2012-08-07 | 2014-02-13 | Microsoft Corporation | Virtual joint orientation in virtual skeleton |
| WO2014042121A1 (ja) * | 2012-09-12 | 2014-03-20 | 独立行政法人産業技術総合研究所 | 動作評価装置及びそのプログラム |
| JP2014090841A (ja) * | 2012-11-02 | 2014-05-19 | Sony Corp | 情報処理装置および情報処理方法、並びにプログラム |
| KR101459445B1 (ko) * | 2012-12-18 | 2014-11-07 | 현대자동차 주식회사 | 차량내 손목각을 이용한 사용자 인터페이스 조작 시스템 및 방법 |
| US20140276095A1 (en) * | 2013-03-15 | 2014-09-18 | Miriam Griggs | System and method for enhanced goniometry |
| KR102085180B1 (ko) * | 2013-10-08 | 2020-03-05 | 삼성전자주식회사 | 몸 방향 추정 방법, 상기 방법을 기록한 컴퓨터 판독 가능 저장매체 및 몸 방향 추정 장치. |
| JP6526026B2 (ja) | 2013-10-20 | 2019-06-05 | オアフ グループ,リミティド ライアビリティ カンパニー | 物体の動作判定方法及びシステム |
| US20150220158A1 (en) * | 2014-01-07 | 2015-08-06 | Nod Inc. | Methods and Apparatus for Mapping of Arbitrary Human Motion Within an Arbitrary Space Bounded by a User's Range of Motion |
| EP3094249B1 (en) * | 2014-01-13 | 2021-09-15 | Eiffel Medtech Inc. | Method and system for the visual representation of the kinematics of a patient's joint and associated parameters |
| WO2016003529A2 (en) * | 2014-04-23 | 2016-01-07 | University Of Southern California | Rapid avatar capture and simulation using commodity depth sensors |
| KR102420313B1 (ko) * | 2014-06-30 | 2022-07-13 | 소니그룹주식회사 | 정보 처리 장치 및 정보 처리 방법, 컴퓨터 프로그램, 그리고 화상 처리 시스템 |
| KR101515845B1 (ko) | 2014-08-07 | 2015-05-04 | 스타십벤딩머신 주식회사 | 동작 인식 방법 및 동작 인식 장치 |
| KR101656940B1 (ko) * | 2014-09-18 | 2016-09-13 | 한국산업기술대학교산학협력단 | 관성 측정 장치를 이용한 인체 관절 가동 범위 측정시스템 |
| GB2530754B (en) | 2014-09-30 | 2017-05-03 | 270 Vision Ltd | Mapping the trajectory of a part of the anatomy of the human or animal body |
| GB2566850A (en) * | 2014-09-30 | 2019-03-27 | 270 Vision Ltd | Mapping trajectories of the anatomy of the human or animal body for comparative analysis |
| CN104298358B (zh) * | 2014-10-29 | 2017-11-21 | 指挥家(厦门)科技有限公司 | 一种基于关节空间位置数据的动态3d手势识别方法 |
| CN104407709B (zh) | 2014-12-09 | 2015-12-02 | 北京银河润泰科技有限公司 | 可穿戴设备的穿戴状态的处理方法及装置 |
| JP6583605B2 (ja) * | 2014-12-12 | 2019-10-02 | カシオ計算機株式会社 | 運動情報生成装置及び運動情報生成方法、運動情報生成プログラム |
| EP3241133B1 (en) * | 2014-12-29 | 2021-02-03 | NCS Lab S.r.l. | System and method for identifying alterations in a musculoskeletal system of a specific subject |
| KR101685280B1 (ko) * | 2015-01-22 | 2016-12-09 | 한국해양대학교 산학협력단 | 인체동작 수집 및 분석 시스템 |
| CN104764491A (zh) * | 2015-04-08 | 2015-07-08 | 深圳市康康网络技术有限公司 | 设备使用状态识别方法及电子设备 |
| CN104825168B (zh) * | 2015-05-23 | 2017-04-26 | 京东方科技集团股份有限公司 | 颈椎活动测量装置及测量方法 |
| US10248188B2 (en) * | 2015-06-03 | 2019-04-02 | James M. O'Neil | System and method for generating wireless signals and controlling digital responses from physical movement |
| US11237624B2 (en) * | 2015-06-03 | 2022-02-01 | James M. O'Neil | System and method for adapting auditory biofeedback cues and gait analysis using wireless signals and digital responses |
| US10949716B2 (en) * | 2015-11-25 | 2021-03-16 | Jakob Balslev | Methods and systems of real time movement classification using a motion capture suit |
| US11419521B2 (en) * | 2016-01-29 | 2022-08-23 | Janssen Pharmaceutica Nv | Sensor device and carriers |
| KR101751176B1 (ko) * | 2016-03-09 | 2017-06-27 | 이화여자대학교 산학협력단 | 가상 우주 체험을 제공하는 장치 및 방법 |
| US10509469B2 (en) | 2016-04-21 | 2019-12-17 | Finch Technologies Ltd. | Devices for controlling computers based on motions and positions of hands |
| US11033223B2 (en) * | 2016-04-29 | 2021-06-15 | Regents Of The University Of Minnesota | 3D shoulder motion measurement device and scapular angle locator |
| US11006856B2 (en) * | 2016-05-17 | 2021-05-18 | Harshavardhana Narayana Kikkeri | Method and program product for multi-joint tracking combining embedded sensors and an external sensor |
| CN106123896B (zh) * | 2016-06-14 | 2019-03-01 | 上海锡月科技有限公司 | 一种动作捕捉系统 |
| CN106293083B (zh) * | 2016-08-07 | 2019-06-04 | 南京仁光电子科技有限公司 | 一种大屏幕交互系统及其交互方法 |
| US20180104561A1 (en) * | 2016-10-15 | 2018-04-19 | William Alan Kostuj | Golf grip hand structure efficiency device and method of use |
| WO2018081795A1 (en) | 2016-10-31 | 2018-05-03 | Zipline Medical, Inc. | Systems and methods for monitoring physical therapy of the knee and other joints |
| KR101950359B1 (ko) | 2016-11-30 | 2019-02-20 | (주)코어센스 | 하이브리드 모션캡쳐 시스템의 위치 추정 방법 |
| KR102640420B1 (ko) * | 2016-12-22 | 2024-02-26 | 삼성전자주식회사 | 홈 로봇 장치의 동작 운용 방법 및 이를 지원하는 홈 로봇 장치 |
| CN108256403B (zh) * | 2016-12-29 | 2022-03-25 | 晶翔微系统股份有限公司 | 将肢体运动特性数据化的装置及方法 |
| CN211073605U (zh) * | 2017-02-20 | 2020-07-24 | 菲利尔探测公司 | 将传感器模块安装到无人地面车辆 |
| US10705113B2 (en) | 2017-04-28 | 2020-07-07 | Finch Technologies Ltd. | Calibration of inertial measurement units attached to arms of a user to generate inputs for computer systems |
| TWI635318B (zh) * | 2017-04-28 | 2018-09-11 | 宏星技術股份有限公司 | 頭戴式顯示器、控制方法,以及非暫時性電腦可讀取媒體 |
| US10540006B2 (en) * | 2017-05-16 | 2020-01-21 | Finch Technologies Ltd. | Tracking torso orientation to generate inputs for computer systems |
| US10379613B2 (en) | 2017-05-16 | 2019-08-13 | Finch Technologies Ltd. | Tracking arm movements to generate inputs for computer systems |
| GB2566923B (en) * | 2017-07-27 | 2021-07-07 | Mo Sys Engineering Ltd | Motion tracking |
| CN107741196B (zh) | 2017-12-04 | 2019-11-12 | 成都思悟革科技有限公司 | 一种人体姿态获得方法及系统 |
| US10521011B2 (en) | 2017-12-19 | 2019-12-31 | Finch Technologies Ltd. | Calibration of inertial measurement units attached to arms of a user and to a head mounted device |
| US10509464B2 (en) * | 2018-01-08 | 2019-12-17 | Finch Technologies Ltd. | Tracking torso leaning to generate inputs for computer systems |
| US11016116B2 (en) * | 2018-01-11 | 2021-05-25 | Finch Technologies Ltd. | Correction of accumulated errors in inertial measurement units attached to a user |
| WO2019167214A1 (ja) * | 2018-03-01 | 2019-09-06 | 株式会社ソニー・インタラクティブエンタテインメント | 推定装置、推定方法及びプログラム |
| CN108664896A (zh) * | 2018-04-16 | 2018-10-16 | 彭友 | 基于OpenPose的击剑动作获取方法及计算机存储介质 |
| US10416755B1 (en) | 2018-06-01 | 2019-09-17 | Finch Technologies Ltd. | Motion predictions of overlapping kinematic chains of a skeleton model used to control a computer system |
| US11474593B2 (en) | 2018-05-07 | 2022-10-18 | Finch Technologies Ltd. | Tracking user movements to control a skeleton model in a computer system |
| WO2020009715A2 (en) * | 2018-05-07 | 2020-01-09 | Finch Technologies Ltd. | Tracking user movements to control a skeleton model in a computer system |
| US11009941B2 (en) * | 2018-07-25 | 2021-05-18 | Finch Technologies Ltd. | Calibration of measurement units in alignment with a skeleton model to control a computer system |
| GB2574074B (en) | 2018-07-27 | 2020-05-20 | Mclaren Applied Tech Ltd | Time synchronisation |
| JP7058198B2 (ja) * | 2018-08-21 | 2022-04-21 | グリー株式会社 | 画像表示システム、画像表示方法及び画像表示プログラム |
| WO2020085537A1 (ko) * | 2018-10-25 | 2020-04-30 | (주)리얼감 | 동작인식 디바이스 및 이를 이용한 동작인식 방법 |
| WO2020085538A1 (ko) * | 2018-10-25 | 2020-04-30 | (주)리얼감 | 동작인식 시스템 및 이를 이용한 동작인식 방법 |
| WO2020116837A1 (ko) * | 2018-12-06 | 2020-06-11 | (주)코어센스 | 융합형 모션 캡쳐 시스템 기반의 모션 구현 장치 및 그 방법 |
| CN109815930B (zh) * | 2019-02-01 | 2021-04-09 | 中国人民解放军总医院第六医学中心 | 一种动作模仿拟合度评价方法 |
| WO2020244846A1 (en) * | 2019-06-03 | 2020-12-10 | Thyssenkrupp Elevator Innovation Center S.A. | Passenger detection system for passenger moving systems |
| CN110413110A (zh) * | 2019-07-05 | 2019-11-05 | 深圳市工匠社科技有限公司 | 虚拟角色的控制方法及相关产品 |
| JP6670028B1 (ja) * | 2019-07-18 | 2020-03-18 | 任天堂株式会社 | 情報処理システム、情報処理プログラム、情報処理装置、および情報処理方法 |
| US10809797B1 (en) | 2019-08-07 | 2020-10-20 | Finch Technologies Ltd. | Calibration of multiple sensor modules related to an orientation of a user of the sensor modules |
| GB2586473A (en) * | 2019-08-19 | 2021-02-24 | Mechatech Ltd | Joint motion capture |
| US11175729B2 (en) * | 2019-09-19 | 2021-11-16 | Finch Technologies Ltd. | Orientation determination based on both images and inertial measurement units |
| US10976863B1 (en) | 2019-09-19 | 2021-04-13 | Finch Technologies Ltd. | Calibration of inertial measurement units in alignment with a skeleton model to control a computer system based on determination of orientation of an inertial measurement unit from an image of a portion of a user |
| GB2588236B (en) | 2019-10-18 | 2024-03-20 | Mclaren Applied Ltd | Gyroscope bias estimation |
| US11145102B2 (en) * | 2019-11-04 | 2021-10-12 | Volvo Car Corporation | Using a handheld device to recreate a human pose or align an object in an augmented reality or virtual reality environment |
| CN111027431A (zh) * | 2019-11-29 | 2020-04-17 | 广州幻境科技有限公司 | 一种基于惯性传感器的上肢姿态模糊定位方法及系统 |
| KR102237124B1 (ko) * | 2020-02-14 | 2021-04-06 | 고려대학교 산학협력단 | 신경망 기반 모션 리타겟팅 방법 및 장치 |
| US11805157B2 (en) * | 2020-05-12 | 2023-10-31 | True Meeting Inc. | Sharing content during a virtual 3D video conference |
| KR102478415B1 (ko) * | 2020-07-17 | 2022-12-19 | 주식회사 아이팝 | 교차 공분산을 이용한 3차원 좌표 추정 방법 |
| KR102456069B1 (ko) * | 2020-07-17 | 2022-10-18 | 주식회사 아이팝 | 현실 가상 모델 간 비율 보정 방법 |
| KR102486140B1 (ko) | 2020-10-12 | 2023-01-10 | 한국과학기술연구원 | 대상의 신체 치수의 비율을 교정하는 시스템 및 방법 |
| CN112504188B (zh) * | 2020-11-19 | 2021-11-23 | 东风汽车集团有限公司 | 一种生成人体模型的方法 |
| CN112526154B (zh) * | 2020-11-21 | 2021-09-03 | 西安交通大学 | 一种计算机视觉下的圆模板匹配旋转结构运动无标记测量方法 |
| CN112535475B (zh) * | 2020-11-24 | 2021-11-19 | 中国标准化研究院 | 基于刚性上臂模型的功能性肩关节旋转中心定位方法 |
| CN112634415B (zh) * | 2020-12-11 | 2023-11-10 | 北方信息控制研究院集团有限公司 | 一种基于人体骨骼模型的人员动作实时仿真方法 |
| US11887259B2 (en) * | 2021-01-25 | 2024-01-30 | Walker L. Sherk | Method, system, and apparatus for full-body tracking with magnetic fields in virtual reality and augmented reality applications |
| CN114271815B (zh) * | 2021-12-27 | 2023-04-25 | 江西边际科技有限公司 | 一种无规律分布式位姿数据收集及处理装置 |
| CN114562993A (zh) * | 2022-02-28 | 2022-05-31 | 联想(北京)有限公司 | 一种轨迹处理方法、装置及电子设备 |
| KR102557953B1 (ko) * | 2023-03-16 | 2023-07-20 | 주식회사 케이에이씨미디어그룹 | 안무 분석 시스템 |
Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08221599A (ja) * | 1995-02-15 | 1996-08-30 | Matsushita Electric Ind Co Ltd | 3次元の動き生成および解析方法 |
| JPH09138863A (ja) * | 1995-11-13 | 1997-05-27 | Matsushita Electric Ind Co Ltd | 3次元の動き生成装置 |
| JPH09330424A (ja) * | 1996-06-07 | 1997-12-22 | Matsushita Electric Ind Co Ltd | 3次元骨格構造の動き変換装置 |
| JPH1021424A (ja) * | 1996-06-28 | 1998-01-23 | Atr Tsushin Syst Kenkyusho:Kk | 3次元映像作成装置 |
| JPH10154238A (ja) * | 1996-09-25 | 1998-06-09 | Matsushita Electric Ind Co Ltd | 動作生成装置 |
| JPH10261090A (ja) * | 1997-03-19 | 1998-09-29 | Tokyo Electric Power Co Inc:The | モーションキャプチャシステム |
| JP2003308532A (ja) * | 2002-02-12 | 2003-10-31 | Univ Tokyo | 受動的光学式モーションキャプチャデータの処理法 |
| JP2004157850A (ja) * | 2002-11-07 | 2004-06-03 | Olympus Corp | 運動検出装置 |
| JP2005535031A (ja) * | 2002-08-02 | 2005-11-17 | 本田技研工業株式会社 | 人体測定に基づく骨格フィッティング |
| JP2006020780A (ja) * | 2004-07-07 | 2006-01-26 | Nec Tokin Corp | 四肢訓練装置 |
| JP2006034343A (ja) * | 2004-07-22 | 2006-02-09 | Tamagawa Seiki Co Ltd | 生体のリハビリ用姿勢モニタリング方法及び装置 |
| JP2006343114A (ja) * | 2005-06-07 | 2006-12-21 | International Rescue System Institute | フレキシブルセンサチューブ |
| WO2007058526A1 (en) * | 2005-11-16 | 2007-05-24 | Xsens Technologies B.V. | Motion tracking system |
| JP2007333690A (ja) * | 2006-06-19 | 2007-12-27 | Sony Corp | モーションキャプチャ装置及びモーションキャプチャ方法、並びにモーションキャプチャプログラム |
| WO2008026357A1 (fr) * | 2006-08-29 | 2008-03-06 | Microstone Corporation | Procédé de capture de mouvements |
| JP2008533459A (ja) * | 2005-03-09 | 2008-08-21 | コミッサリア タ レネルジー アトミーク | 幾何学的形状の取得のための方法及び装置 |
| JP2008289866A (ja) * | 2007-03-15 | 2008-12-04 | Xsens Technologies Bv | 較正ユニットを使った動作追跡のためのシステムと方法 |
| JP2010088628A (ja) * | 2008-10-07 | 2010-04-22 | Akita Univ | 手指関節位置推定装置、及び手指関節位置推定方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5930741A (en) * | 1995-02-28 | 1999-07-27 | Virtual Technologies, Inc. | Accurate, rapid, reliable position sensing using multiple sensing technologies |
| US5744953A (en) * | 1996-08-29 | 1998-04-28 | Ascension Technology Corporation | Magnetic motion tracker with transmitter placed on tracked object |
| US5990908A (en) * | 1997-09-22 | 1999-11-23 | Lamb & Company | Method and apparatus for processing full motion computer animation |
| WO2002037827A2 (en) * | 2000-10-30 | 2002-05-10 | Naval Postgraduate School | Method and apparatus for motion tracking of an articulated rigid body |
| US20030215130A1 (en) * | 2002-02-12 | 2003-11-20 | The University Of Tokyo | Method of processing passive optical motion capture data |
| US7403202B1 (en) * | 2005-07-12 | 2008-07-22 | Electronic Arts, Inc. | Computer animation of simulated characters using combinations of motion-capture data and external force modelling or other physics models |
| FR2916069B1 (fr) * | 2007-05-11 | 2009-07-31 | Commissariat Energie Atomique | Procede de traitement pour la capture de mouvement d'une structure articulee |
| KR101483713B1 (ko) * | 2008-06-30 | 2015-01-16 | 삼성전자 주식회사 | 모션 캡쳐 장치 및 모션 캡쳐 방법 |
-
2008
- 2008-06-30 KR KR20080062837A patent/KR101483713B1/ko active IP Right Grant
-
2009
- 2009-06-30 EP EP09164139.9A patent/EP2141632A3/en not_active Ceased
- 2009-06-30 US US12/458,103 patent/US8988438B2/en active Active
- 2009-06-30 JP JP2009155856A patent/JP5657216B2/ja active Active
Patent Citations (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08221599A (ja) * | 1995-02-15 | 1996-08-30 | Matsushita Electric Ind Co Ltd | 3次元の動き生成および解析方法 |
| JPH09138863A (ja) * | 1995-11-13 | 1997-05-27 | Matsushita Electric Ind Co Ltd | 3次元の動き生成装置 |
| JPH09330424A (ja) * | 1996-06-07 | 1997-12-22 | Matsushita Electric Ind Co Ltd | 3次元骨格構造の動き変換装置 |
| JPH1021424A (ja) * | 1996-06-28 | 1998-01-23 | Atr Tsushin Syst Kenkyusho:Kk | 3次元映像作成装置 |
| JPH10154238A (ja) * | 1996-09-25 | 1998-06-09 | Matsushita Electric Ind Co Ltd | 動作生成装置 |
| JPH10261090A (ja) * | 1997-03-19 | 1998-09-29 | Tokyo Electric Power Co Inc:The | モーションキャプチャシステム |
| JP2003308532A (ja) * | 2002-02-12 | 2003-10-31 | Univ Tokyo | 受動的光学式モーションキャプチャデータの処理法 |
| JP2005535031A (ja) * | 2002-08-02 | 2005-11-17 | 本田技研工業株式会社 | 人体測定に基づく骨格フィッティング |
| JP2004157850A (ja) * | 2002-11-07 | 2004-06-03 | Olympus Corp | 運動検出装置 |
| JP2006020780A (ja) * | 2004-07-07 | 2006-01-26 | Nec Tokin Corp | 四肢訓練装置 |
| JP2006034343A (ja) * | 2004-07-22 | 2006-02-09 | Tamagawa Seiki Co Ltd | 生体のリハビリ用姿勢モニタリング方法及び装置 |
| JP2008533459A (ja) * | 2005-03-09 | 2008-08-21 | コミッサリア タ レネルジー アトミーク | 幾何学的形状の取得のための方法及び装置 |
| JP2006343114A (ja) * | 2005-06-07 | 2006-12-21 | International Rescue System Institute | フレキシブルセンサチューブ |
| WO2007058526A1 (en) * | 2005-11-16 | 2007-05-24 | Xsens Technologies B.V. | Motion tracking system |
| JP2007333690A (ja) * | 2006-06-19 | 2007-12-27 | Sony Corp | モーションキャプチャ装置及びモーションキャプチャ方法、並びにモーションキャプチャプログラム |
| WO2008026357A1 (fr) * | 2006-08-29 | 2008-03-06 | Microstone Corporation | Procédé de capture de mouvements |
| JP2008289866A (ja) * | 2007-03-15 | 2008-12-04 | Xsens Technologies Bv | 較正ユニットを使った動作追跡のためのシステムと方法 |
| JP2010088628A (ja) * | 2008-10-07 | 2010-04-22 | Akita Univ | 手指関節位置推定装置、及び手指関節位置推定方法 |
Non-Patent Citations (1)
| Title |
|---|
| JPN6014003230; Daniel Roetenberg、外2名: 'Ambulatory Position and Orientation Tracking Fusing Magnetic and Inertial Sensing' IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING VOL.54,NO.5, 200705, p.883-890, IEEE * |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013535039A (ja) * | 2010-04-13 | 2013-09-09 | サムスン エレクトロニクス カンパニー リミテッド | 仮想世界処理装置及び方法 |
| JP2016026342A (ja) * | 2010-04-13 | 2016-02-12 | サムスン エレクトロニクス カンパニー リミテッド | 仮想世界処理装置及び方法 |
| US9597592B2 (en) | 2010-04-13 | 2017-03-21 | Samsung Electronics Co., Ltd. | Method and apparatus for processing virtual world |
| JP2014509011A (ja) * | 2011-02-18 | 2014-04-10 | マイクロソフト コーポレーション | 動き認識 |
| JP2013181966A (ja) * | 2012-03-05 | 2013-09-12 | Toyota Central R&D Labs Inc | ダミー計測装置 |
| JP2017511906A (ja) * | 2014-01-09 | 2017-04-27 | イクセンス・ホールディング・ベー・フェーXsens Holding B.V. | 数を減らした装着センサセットを用いたモーショントラッキング |
| JP2016198962A (ja) * | 2015-04-10 | 2016-12-01 | 凸版印刷株式会社 | 三次元造形物作成装置 |
| JP2016206081A (ja) * | 2015-04-24 | 2016-12-08 | 株式会社東芝 | 動作推測装置および動作推測方法 |
| US10856772B2 (en) | 2016-02-15 | 2020-12-08 | Omron Corporation | Calculation device, calculation method, and non-transitory computer readable recording medium |
| WO2017141565A1 (ja) * | 2016-02-15 | 2017-08-24 | オムロン株式会社 | 演算装置、演算方法及び演算プログラム |
| JP2017146116A (ja) * | 2016-02-15 | 2017-08-24 | オムロン株式会社 | 演算装置、演算方法及び演算プログラム |
| CN107923741A (zh) * | 2016-02-15 | 2018-04-17 | 欧姆龙株式会社 | 运算装置、运算方法及运算程序 |
| JP2018200568A (ja) * | 2017-05-26 | 2018-12-20 | 株式会社コロプラ | 仮想空間を介して通信するための方法、当該方法をコンピュータに実行させるためのプログラム、および当該プログラムを実行するための情報処理装置 |
| JP2018200671A (ja) * | 2017-05-26 | 2018-12-20 | 株式会社コロプラ | 仮想空間を介して通信するための方法、当該方法をコンピュータに実行させるためのプログラム、および当該プログラムを実行するための情報処理装置 |
| JP6257825B1 (ja) * | 2017-05-26 | 2018-01-10 | 株式会社コロプラ | 仮想空間を介して通信するための方法、当該方法をコンピュータに実行させるためのプログラム、および当該プログラムを実行するための情報処理装置 |
| JPWO2020049847A1 (ja) * | 2018-09-06 | 2021-08-12 | 株式会社ソニー・インタラクティブエンタテインメント | 推定装置、学習装置、推定方法、学習方法及びプログラム |
| WO2020049847A1 (ja) * | 2018-09-06 | 2020-03-12 | 株式会社ソニー・インタラクティブエンタテインメント | 推定装置、学習装置、推定方法、学習方法及びプログラム |
| US11763464B2 (en) | 2018-09-06 | 2023-09-19 | Sony Interactive Entertainment Inc. | Estimation apparatus, learning apparatus, estimation method, learning method, and program |
| JP7171745B2 (ja) | 2018-09-06 | 2022-11-15 | 株式会社ソニー・インタラクティブエンタテインメント | 推定装置、学習装置、推定方法、学習方法及びプログラム |
| JP2020047239A (ja) * | 2018-09-19 | 2020-03-26 | 未來市股▲ふん▼有限公司 | トラッキングシステム及びそのトラッキング方法 |
| US10817047B2 (en) | 2018-09-19 | 2020-10-27 | XRSpace CO., LTD. | Tracking system and tacking method using the same |
| JP2020047235A (ja) * | 2018-09-20 | 2020-03-26 | 未來市股▲ふん▼有限公司 | 追跡方法及び追跡方法を使用する追跡システム |
| WO2020070928A1 (ja) * | 2018-10-03 | 2020-04-09 | 株式会社ソニー・インタラクティブエンタテインメント | スケルトンモデル更新装置、スケルトンモデル更新方法及びプログラム |
| WO2020070812A1 (ja) * | 2018-10-03 | 2020-04-09 | 株式会社ソニー・インタラクティブエンタテインメント | スケルトンモデル更新装置、スケルトンモデル更新方法及びプログラム |
| US11605192B2 (en) | 2018-10-03 | 2023-03-14 | Sony Interactive Entertainment Inc. | Skeleton model update apparatus, skeleton model update method, and program |
| JPWO2020070928A1 (ja) * | 2018-10-03 | 2021-09-02 | 株式会社ソニー・インタラクティブエンタテインメント | スケルトンモデル更新装置、スケルトンモデル更新方法及びプログラム |
| JP7038847B2 (ja) | 2018-10-03 | 2022-03-18 | 株式会社ソニー・インタラクティブエンタテインメント | スケルトンモデル更新装置、スケルトンモデル更新方法及びプログラム |
| JP2020077374A (ja) * | 2018-11-07 | 2020-05-21 | 学校法人法政大学 | 仮想体の動作制御システム、人体拘束治具、及び仮想体の動作制御方法 |
| JP7359422B2 (ja) | 2018-11-07 | 2023-10-11 | 学校法人法政大学 | 仮想体の動作制御システム、人体拘束治具、及び仮想体の動作制御方法 |
| JP7250726B2 (ja) | 2020-04-24 | 2023-04-03 | グリー株式会社 | コンピュータプログラム、サーバ装置及び方法 |
| JP2021174239A (ja) * | 2020-04-24 | 2021-11-01 | グリー株式会社 | コンピュータプログラム、サーバ装置及び方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2141632A2 (en) | 2010-01-06 |
| US8988438B2 (en) | 2015-03-24 |
| KR20100002803A (ko) | 2010-01-07 |
| JP5657216B2 (ja) | 2015-01-21 |
| US20090322763A1 (en) | 2009-12-31 |
| KR101483713B1 (ko) | 2015-01-16 |
| EP2141632A3 (en) | 2014-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5657216B2 (ja) | モーションキャプチャー装置及びモーションキャプチャー方法 | |
| JP6973388B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| US11586276B2 (en) | Systems and methods for generating complementary data for visual display | |
| JP5931215B2 (ja) | 姿勢を推定する方法及び装置 | |
| CN101579238B (zh) | 人体运动捕获三维再现系统及其方法 | |
| US11481029B2 (en) | Method for tracking hand pose and electronic device thereof | |
| JP2017503225A (ja) | モーションキャプチャシステム | |
| Chen et al. | Real-time human motion capture driven by a wireless sensor network | |
| CN110609621B (zh) | 姿态标定方法及基于微传感器的人体运动捕获系统 | |
| JPH09330424A (ja) | 3次元骨格構造の動き変換装置 | |
| JPWO2009116597A1 (ja) | 姿勢把握装置、姿勢把握プログラム、及び姿勢把握方法 | |
| CN109781104B (zh) | 运动姿态确定及定位方法、装置、计算机设备及介质 | |
| Yang et al. | 3-D markerless tracking of human gait by geometric trilateration of multiple Kinects | |
| Tao et al. | Human modeling and real-time motion reconstruction for micro-sensor motion capture | |
| CN113268141B (zh) | 一种基于惯性传感器和织物电子的动作捕获方法及装置 | |
| Xiang et al. | Comparing real-time human motion capture system using inertial sensors with microsoft kinect | |
| CN109003300B (zh) | 一种基于人体质心位移计算算法的虚拟现实系统 | |
| JP2937834B2 (ja) | 3次元の動き生成装置 | |
| WO2020174586A1 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| KR101731188B1 (ko) | 동작 추정 장치 및 그 방법 | |
| Payandeh et al. | Experimental Study of a Deep-Learning RGB-D Tracker for Virtual Remote Human Model Reconstruction | |
| JP2014117409A (ja) | 身体関節位置の計測方法および装置 | |
| Usta | Comparison of quaternion and euler angle methods for joint angle animation of human figure models | |
| JPH1021424A (ja) | 3次元映像作成装置 | |
| WO2021001911A1 (ja) | 情報処理装置、情報処理方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120216 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130311 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130314 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130411 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140204 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140501 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141028 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5657216 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |