本発明は、進入路に沿って縦、若しくは左右横方向に配置された駐車枠に駐車しようとする際に、駐車操作の案内をする駐車支援装置及び駐車支援方法に関する。
駐車枠への駐車を容易とするための駐車支援装置として、従来、特許文献の特許第3632632号公報に開示されたものがある。
これは、目標の駐車枠への縦列駐車に際して、まず自車両を目標の駐車枠と平行でかつ目標の駐車枠に隣接する前方の駐車枠の後端ラインに運転席が並ぶ位置に停止させて、この位置を基準位置として互いに外接する円弧を組み合わせた軌跡に沿って設定した第1〜第4位置を経て目標駐車位置へ案内するようにしたものである。
特許第3632632号公報
しかしながら、上記従来の装置は駐車案内開始の基準位置を目標の駐車枠と平行でかつ前方の駐車枠の後端ラインに運転席が並ぶ位置に限定しているので、駐車支援がとくに求められる初心者にとっては、この基準位置の条件を満たすこと自体が困難であり、目標駐車位置へ駐車することが難しい。
したがって本発明は、駐車のため停止する位置が任意位置であっても、容易に目標駐車位置への駐車が可能となる駐車支援装置及び駐車支援方法を提供することを目的とする。
このため本発明は、車両の複数位置に設置されたカメラで自車両周囲を撮像し、その撮像信号をカメラ光軸を路面に垂直にした視点からの画像信号へ変換合成して俯瞰画像を作成し、俯瞰画像における自車両の現在位置に基づく案内指標を設定して、俯瞰画像に案内指標を配置した重畳画像を作成し、この重畳画像を表示手段に表示することを特徴とする。
本発明によれば、自車両周囲を撮像して得られた撮像信号を変換合成して俯瞰画像を作成し、俯瞰画像における自車両の現在位置に基づく案内指標を設定し、俯瞰画像に案内指標を配置して作成された重畳画像を表示することで、運転者は表示された案内指標を参照することで駐車枠への進入位置を容易に把握することができる。
以下、本発明の実施の形態を実施例1〜5により詳細に説明する。
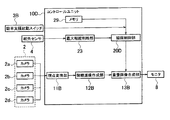
図1は実施例1に係る駐車支援装置1Bの構成を示すブロック図である。
駐車支援装置1Bは、コントロールユニット10Bに対して、カメラ2(2a、2b、2c、2d)、駐車支援起動スイッチ3B、モニタ8、が接続されて構成される。
カメラ2は車両の4隅または4辺にそれぞれ設置された複数台からなり、自車両周囲の所定距離範囲、例えば5mの範囲の路面を撮像して、撮像信号をコントロールユニット10Bに出力する。
駐車支援起動スイッチ3Bは車室内インストメントパネル(インパネ)、若しくは、ステアリングに設置されており、図2に示すような駐車の方向や方式を運転者が選択できるようになっている。
図2において、自車両アイコン31は自車両を表し、スイッチノブ32〜36は自車両の方向に対して、いずれの方向の駐車枠へ駐車しようとしているのかを選択するスイッチとなっている。具体的に、スイッチノブ32は自車両の左方向に位置する駐車枠に対して前進して並列駐車を行う場合、スイッチノブ33は自車両の右方向に位置する駐車枠に対して前進して並列駐車を行う場合、スイッチノブ34は自車両の左方向に位置する駐車枠に対して後退して並列駐車を行う場合、スイッチノブ35は自車両の右方向に位置する駐車枠に対して後退して並列駐車を行う場合、スイッチノブ36は自車両の左方向に位置する駐車枠に対して後退して縦列駐車を行う場合に操作する。
駐車支援起動スイッチ3Bは、駐車支援表示の開始をコントロールユニット10Bへ出力すると共に、描画制御部20Bに運転者に選択された駐車方式を出力する。
モニタ8は、インストルメントパネルに設置され、コントロールユニット10Bの出力により支援情報を画像表示する。モニタ8としては液晶やCRTなど適宜選択可能である。
コントロールユニット10Bは、内部メモリを備えたCPUで構成され、以下の機能部位を有する。
すなわち、視点変換部11Bは、カメラ2からの画像信号による画像フレームが、カメラ光軸を路面に垂直にした視点からの画像フレームになるように、画素を並べ替えた画像信号へ変換する。
俯瞰画像作成部12Bは、各カメラ2の視点変換された画像信号をもとに画像合成して、自車両の直上から見た自車両周囲の俯瞰画像を作成する。図5に自車両アイコンMcで表される自車両の側方に駐車枠Sを区画する枠線Hがある場合の俯瞰画像例を示す。枠線Hは、駐車枠Sの並びを示す駐車枠線、壁面、あるいは駐車車両の列を象徴化して示している。自車両周囲の俯瞰画像は重畳画像合成部13Bへ送られる。
メモリ29には、モニタ8に表示する自車両アイコンMc、ならびに運転者に駐車を支援する際の案内指標(アイコン)の画像データが格納されている。
図3にこれらの画像データに基づく案内指標の一例を示す。
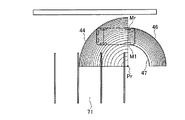
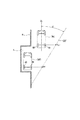
図3(a)は縦列後退駐車用の案内指標で、前部最外周の案内指標44と後部最外周の案内指標46からなり、前部最外周の案内指標44は自車両(自車両アイコンMc)の右側の旋回中心点Pcrを中心(要)として、自車両(自車両アイコンMc)の車体の左前端を通る旋回円軌跡の1/4の円弧を外縁とする扇形状をなしている。後部最外周の案内指標46は、同図に示すように、同じ旋回中心点Pcrを中心(要)として、自車両後端部を通る旋回円軌跡の1/4の円弧を外縁とする扇形状をなしている。
なお、後部最外周の案内指標46は、旋回時の自車両車体後部の通過領域を示すものであるから、その外縁は、前部最外周の案内指標44と同様に車体の左後端を通るものとしてもよいが、ここでは簡単のため左後輪Wlの接地点を通るものとしている。したがって、外縁が旋回外側の後輪の接地点から左後端の間を通る円上の円弧であれば後部最外周の案内指標46として適当である。
前部最外周の案内指標44と後部最外周の案内指標46は、それぞれ外縁部分が強調されるように、要から外縁へ向かうほどに濃くなるようにグラデーションが施されているとともに、半透明で他の画像の上に重なったときでも当該他の画像も認識可能となるように設定される。
また、上記案内指標44,46は、旋回中心点を右側としているが、左側を旋回中心点Pclとした場合でも、左右を逆にすることで同様に案内指標が設定される。
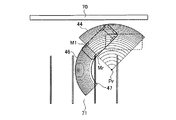
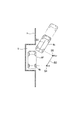
図3(b)は並列後退駐車用の案内指標で、同図(a)に示す案内指標に対して、自車両(自車両アイコンMc)の左側の旋回中心点Pclを基準にして後部最内周の案内指標47を追加したものである。後部最内周の案内指標47は、同じ旋回中心点Prlを中心として、自車両後端部を通る旋回円軌跡の1/4の円弧をなしている。
なお、後部最内周の案内指標47と後部最外周の案内指標46の外縁で囲まれた領域では、旋回時の自車両車体後部の通過領域を示すものであるから、案内指標47は、前部最外周の案内指標44と同様に車体の右後端を通るものとしてもよいが、ここでは簡単のため左後輪Wlの接地点を通るものとしている。したがって、案内指標47は旋回内側の後輪の接地点から左後端の間を通る円上の円弧であれば後部最内周の案内指標として適当である。
後部最内周の案内指標47と後部最外周の案内指標46の外縁で囲まれた領域は、前部最外周の案内指標44や後部最外周の案内指標46と同様に、それぞれ外縁部分が強調されるように、要から外縁へ向かうほどに濃くなるようにグラデーションが施されているとともに、半透明で他の画像の上に重なったときでも当該他の画像も認識可能となるように設定される。
図3(b)では自車両の左方向に存在する駐車枠に対して、後退並列駐車を行う場合の案内指標の例を説明したが、駐車支援起動スイッチ3Bで右方向の並列後退駐車が選択された場合には、右側の旋回中心点Pcrを中心(要)として左右方向を反転した案内指標を表示する。
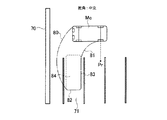
図3(c)は並列前進駐車用の案内指標で、最大転舵状態で前進し、自車両の向きが略90°変化するまでの前進自車両軌跡を示すものである。具体的に、案内指標80は自車両の左側の旋回中心点Pclを中心にして自車両外側(右)前端が前進時に描く軌跡を表し、案内指標81は同条件で自車両内側(左)後輪が描く軌跡を表し、案内指標82は自車両が略90°変化するまで前進した時の位置における自車両前部(略自車両大)を表し、案内指標83は案内指標82と同様に前進した時の位置おける自車両の側部(略自車両大)を表し、案内指標84は自車両を表し、案内指標80〜83で囲まれた領域で、外縁部分が強調され、且つ半透明で他の画像の上に重なったときでも当該他の画像も認識可能となるように設定される。
なお、案内指標81は旋回時の自車両車体後部の通過領域を示すものであるから、その外縁は車体端を通るものとしてもよいが、ここでは簡単のため左後輪Wlの接地点を通るものとしている。したがって、外縁が旋回内側の後輪の接地点から左後端の間を通る円上の円弧であれば案内指標として適当である。
図3(c)では自車両の左方向に存在する駐車枠に対して、前進並列駐車を行う場合の案内指標の例を説明したが、駐車支援起動スイッチ3Bで右方向の並列前進駐車が選択された場合には、右側の旋回中心点Pcrを中心に左右方向を反転した案内指標を表示する。
図3において、モニタ8の画面に表示される現在旋回中心点(右側はPcr、左側はPcl)の現在旋回中心点アイコンは、点をイメージさせる小径の円形状である。自車両の形状、サイズや上記案内指標のサイズ等は、車両の仕様によって定まる固有のものであるから、各アイコンの画像データは予め設定されてメモリ29に格納されている。
図1に戻り、描画制御部20Bは、駐車支援起動スイッチ3Bがオンされたときに起動し、運転者によって選択された方式の駐車支援表示用の案内指標をメモリ29に格納された案内指標の画像データの中から呼び出し、重畳画像合成部13Bへ送る。更に、描画制御部20Bは現在旋回中心点Prの情報に基づいて各案内指標の配置を制御する。
重畳画像合成部13Bは、俯瞰画像作成部12B、描画制御部20Bに接続され、自車両周囲の俯瞰画像上に、上記自車両アイコンMcや案内指標を重ねた重畳画像を作成し、モニタ8に当該重畳画像を表示させる。
図4はコントロールユニット10Bにおける制御処理の流れを示すフローチャートである。図4に示す制御手順は、運転者が駐車枠を視認して任意の位置で停車し、駐車支援起動スイッチ3Bがオンされることにより開始する。最初の停車位置は厳密でなくてよい。
まず、ステップ300において、カメラ2を撮像開始させ、路面を撮像させる。
ステップ301では、俯瞰画像作成部12Bが、視点変換部11Bを経た撮像信号(画像信号)をもとに自車両周囲の俯瞰画像を作成する。
ステップ302で、現在位置における自車両の最小回転半径に基づくの現在旋回中心点Pcを設定する。
ステップ303において、描画制御部20Bがメモリ29から自車両アイコン、運転者のスイッチ操作によって選択された案内指標、現在旋回中心点アイコンの画像データを読み出し、ステップ304において、重畳画像合成部13Bに対して俯瞰画像へのアイコン重畳を行なわせる。
これにより、モニタ8には駐車支援のための画像として、自車両周囲の俯瞰画像に自車両等のアイコンが重畳されて表示される。
ステップ305において、駐車支援起動スイッチ3Bがオフされたか否かを監視し、オフされた場合にはステップ306で自車両アイコン、及び、現在旋回中心点アイコンの表示を消して処理を終了する。一方、ステップ305において、駐車支援起動スイッチ3Bがオフされない場合には処理を継続する。
なお、俯瞰画像はカメラ2で撮像した自車両の周囲であるから、モニタ8では自車両アイコンを画面中央に位置させて表示するのが画像処理上は簡便であるが、駐車支援起動スイッチ3Bがオンされた時点で最初に生成される俯瞰画像における駐車枠Sを含む周囲画像を固定し、モニタ画面では相対的に現在位置の自車両アイコンの位置が変化する表示としてもよい。
図6のモニタ画面に示すように、前部最外周の案内指標44はその扇形状の要を現在位置の自車両アイコンMcの左右後輪(Ml,Mr)の接地点を通る直線K上にある現在旋回中心点Prに一致させ、扇形状の左辺を上記直線Kにそわせて配置される。また、後部最外周の案内指標46は扇形状の要を現在旋回中心点Prに一致させ、扇形状の右辺を上記直線Kにそわせて配置される。前部最外周の案内指標44と後部最外周の案内指標46は半透明であるから、自車両アイコンMcは透過視認できる。
次に、各駐車方法についてのアイコンの使い方を説明する。
先ず図5〜図10を参照して、駐車支援起動スイッチ3Bの縦列後退駐車用のスイッチノブ36が操作された場合の使い方を説明する。
図5は駐車枠Hに対して、駐車枠Sが存在して(Sは駐車枠線で囲まれた領域でもよいし、又は前後の停車車両間のギャップであってもよい)、該駐車枠Sの手前で自車両(自車両アイコンMc)が、停車している様子を俯瞰画像にして、車室内のモニタ8へ表示したものである。
図6は図5の車両位置において、駐車支援起動スイッチ3Bの縦列後退駐車用のスイッチノブ36を操作した様子を示す。具体的には、自車両アイコンMcに対して、図3(a)で説明した案内指標44,46が付加された状態で、該案内指標44,46は自車両アイコンMc側に固定されるため、以降自車両位置が変化した場合でも、モニタ8内での自車両アイコンMcの位置が変化しない表示方式においては、案内指標の位置も変化しないので、モニタ8内の駐車枠Hや駐車枠S等の撮像側が変化するのみとなる。
図7は図6の位置から前進し、縦列後退駐車を開始する位置へ移動した様子を示す。駐車枠Sの大きさにもよるが、目安として、案内指標の前部と後部との境界(後輪車軸の延長線)が駐車枠Sの上部を越える位置まで前進する。
図8は図6の位置から左方向へ最大転舵してから後退した様子を示す。最大転舵後退の目安としては、以降の操作を含めて、前部の案内指標44が駐車枠Sの上部と接触せず、且つ後部の案内指標46が駐車枠Sの左側面と接触しない両条件を満足する位置へ、直進後退で到達可能となる位置(角度)まで後退する。
図9は図8の位置からハンドルを中立位置に戻してから真っ直ぐに後退した様子を示す。 上記図5〜図9においては、真っ直ぐに後退することによって、前部の案内指標44が駐車枠Sの上部と接触しない程度に接近し、且つ後部の案内指標46が駐車枠左側面と接触しない程度に接近する両条件を成立させるよう説明したが、特に真っ直ぐ後退せずとも、図8に示す最大転舵後退で、上記の両条件を満たすことができれば、図7に示す工程は不要となり、省略してもかまわない。
図10は図9の位置から右方向へ最大転舵してから後退した様子を示す。最大転舵状態で後退する位置の目安は、自車両と駐車枠Sとの角度が平行で、且つ自車両後部が駐車枠Sの後部からはみ出さない位置である。また、後退する時にも、自車両の最も外周となる左前部の描く軌跡と、後退時の進行方向前側になる左後部(若しくは左後輪部)の軌跡とが、図7に示す状態と同じであるため、図7において駐車枠Sと案内指標44とが接触しない状態であれば、そのまま最大転舵後退しても駐車枠Sと接触することはない。
但し、自車両の後部と駐車枠Sの下部分との接触については、運転者自身が注意して停車位置を決定する必要がある。同様に、駐車枠Sと自車両とが平行になった以降も、更に後退を行った場合も、自車両後部と駐車枠Sの下部分、及び自車両の左前部と駐車枠Sの側面とが接触する可能性もでてくるので、運転者自身による注意が必要である。
次に、図11〜図14を参照して、上記と同様に駐車支援起動スイッチ3Bの縦列後退駐車用のスイッチノブ36が操作された場合の他の使い方を説明する。なお、図11は図6、図13は図9、図14は図10と同様なのでその説明は省略する。
図12は図11に示す車両位置から、先の図5〜図10で説明した直進前進→最大転舵後退のように移動するのではなく、駐車枠Sの手前から一気に図12に示す位置へ、右旋回しながら前進する様子を示す。このように、直進前進→最大転舵後退の二つのタスクを、右旋回しながら前進の一つのタスクに置き換えることができるため、操作の負荷が低減できる。更に、上記で最大転舵後退タスクは特に初心者においては負荷が高く、上手くいかない場合には何度も切り返すといった難易度の高いタスクを、初心者でも容易に行える前進タスクに置き換えられるので、更なる操作負荷の低減を行うことができる。
次に、図15〜図20を参照して、駐車支援起動スイッチ3Bの並列後退駐車用のスイッチノブ34、または35が操作された場合の使い方を説明する。
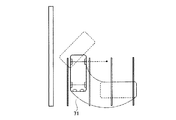
図15は駐車枠71(駐車枠線で囲まれた領域でもよいし、又は左右の停車車両間のギャップであってもよい)に対して、該駐車枠71の手前で自車両(自車両アイコンMc)が、停車している様子を俯瞰画像にして、車室内のモニタ8に表示したものである。また、立体の障害物70は駐車枠71に対向して存在する立体の障害物で、例えば壁や対向駐車枠に駐車された車両の前端のようなものを表している。
図16は図15の車両位置において、駐車支援起動スイッチ3Bの並列後退駐車用のスイッチノブ34を操作した様子を示す。具体的には、自車両アイコンMcに対して、図3(b)で説明した案内指標47が付加された状態を示す。
図17は図16の位置から前進し、並列後退駐車を開始する位置へ移動した様子を示す。駐車枠71と障害物70との距離にもよるが、目安として、前部の案内指標44が障害物70と接触せず、且つ後部の案内指標の旋回内側の案内指標47が駐車枠71の左側に一致する位置まで前進する。
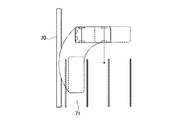
図18〜図19は図17の位置から左方向へ最大転舵してから後退した様子を示す。最大転舵後退の目安としては、自車両と駐車枠71との角度が平行で、且つ自車両後部が駐車枠71からはみ出さない位置である。また、後退する時にも、自車両の最も外周となる右前部の描く軌跡と、後退時の進行方向前側になる左右後部(若しくは左右後輪部)の軌跡とが、図17、図18ならびに図19の状態とで同じであるため、図17において駐車枠71と後部の案内指標46,47とが接触しない状態であれば、そのまま最大転舵後退しても駐車枠71と接触することはない。
以上は駐車支援起動スイッチ3Bのスイッチノブ34が操作された場合で説明してきたが、図20はスイッチノブ35が操作された場合のアイコン表示を示す。具体的には、スイッチノブ34が操作された時の案内指標に対して、車両前後方向の中心軸を基準にして左右勝手違いである。但し、右方向転舵時の最小回転半径と、左方向転舵時の最小回転半径とが異なる車両については、図3で説明した条件を満足するような旋回方向毎の案内指標を個別に用意する必要がある。
次に、図21〜図26を参照して、駐車支援起動スイッチ3Bの並列前進駐車用のスイッチノブ32,33が操作された場合の使い方を説明する。
図21は最も端の駐車枠71(駐車枠線で囲まれた領域でもよいし、又は停車車両と障害物間とのギャップであってもよい)に対して、該駐車枠71の手前で自車両(自車両アイコンMc)が、停車している様子を俯瞰画像にして、車室内のモニタ8に表示したものである。また、立体の障害物70は先と同様である。
図22は図21の車両位置において、駐車支援起動スイッチ3Bの並列前進駐車用のスイッチノブ32を操作した様子を示す。具体的には、自車両アイコンMcに対して、図3(c)で説明した案内指標が付加された状態である。
図23は図22の位置から前進し、並列前進駐車を開始する位置へ移動した様子を示す。駐車枠71と障害物70との距離にもよるが、案内指標の先端部にある略自車大の案内指標82、83が駐車枠71の左右枠線に接触せず、且つ前部の案内指標80が障害物70と接触しない位置まで前進する。
図24〜図25は図23の位置から左方向へ最大転舵してから前進した様子を示す。最大転舵前進の目安としては、自車両と駐車枠71との角度が平行になる位置である。即ち、図23で駐車枠71にセットした案内指標の先端部にある略自車大の案内指標82、83の位置に自車両が到達するまでの位置である。
また、前進する時にも、自車両の最も外周となる右前部の描く軌跡と、障害物70との位置関係とが、図23、図24ならびに図25の状態とで同じであるため、図23において障害物70と案内指標80とが接触しない状態であれば、そのまま最大転舵前進しても、障害物70と接触することはない。
以上は駐車支援起動スイッチ3Bのスイッチノブ32が操作された場合で説明してきたが、図26はスイッチノブ33が操作された場合のアイコン表示を示す。具体的には、スイッチノブ32が操作された時の案内指標に対して、車両前後方向の中心軸を基準にして左右勝手違いである。但し、右方向転舵時の最小回転半径と、左方向転舵時の最小回転半径とが異なる車両については、図3で説明した条件を満足するような旋回方向毎の案内指標を個別に用意する必要がある。
後述する実施例4の図56(a)に示すように、縦列後退駐車用の案内指標では、モニタ8の画面において、駐車枠Sの前端側における枠線Hの角部と前部最外周の案内指標44とが干渉している場合、または自車両が同図(b)に示すように、駐車枠Sの側壁と後部最外周の案内指標46とが干渉しているような場合は、このまま最大転舵状態で後退して枠線Hの角部、若しくは駐車枠Sの側壁と干渉することが把握できるため、両案内指標が接触しないよう再度前進して後退(位置へ切り返し)する。
同様に、図27に示すように、並列後退駐車用の案内指標では、前部の案内指標44が駐車車両(図示せず)、若しくは障害物70に干渉している場合や、後部の案内指標46、47が既駐車車両(図示せず)に干渉したり、駐車枠線を跨いだ状態の場合は、現在位置からでは駐車枠71に収めることができないことを容易に把握することができる。
一方、図28に示す並列前進駐車用の案内指標では、前部の案内指標44が駐車車両(図示せず)、若しくは障害物70に干渉している場合は、現在位置からでは駐車枠71に収めることができないことを容易に把握することができる。
上記に説明したように、現在位置からでは他車両や周囲障害物に干渉しないで駐車することができない状態であることが容易に把握できるため、最大転舵を開始する位置をずらし、各案内指標が障害物と干渉しない位置まで移動するように、運転者自身が駐車戦略(駐車の仕方)を変更するようになる。
本実施例1においては、図4のフローチャートにおけるステップ301が俯瞰画像作成手段を構成し、ステップ303、304が重畳画像合成手段を構成し、モニタ8が表示手段に相当する。
本実施例1は以上のように構成され、カメラ2で撮像した自車両周囲状況を真上から見た俯瞰画像としてモニタ8に表示するとともに、現在位置における自車両Mcの最小回転半径での右側(進入路側)の現在旋回中心点Pcを求め、俯瞰画像にそれぞれ扇形状の要を現在旋回中心点Pcにおいた各案内指標44,46,47,80〜84を駐車方法に応じて適切に選択して俯瞰画像に重畳して表示するので、駐車枠S内まで他との干渉なしに進入可能であるか否かをモニタ8の画面上で容易に確認することができる。これにより、運転者は並列や縦列といった駐車の仕方に応じた適切な案内指標の案内指標を選択して参照することで、運転者は容易に駐車を行うことが可能となる。したがって、本実施例1の装置においては、運転者に対して的確かつ十分に駐車支援を行うことができる。
次に、本発明の実施例2について説明する。
図29は実施例2に係る駐車支援装置の構成を示すブロック図である。
この実施例2で採用した駐車支援装置1Cのコントロールユニット10Cは、先の実施例1におけるコントロールユニット10Bに対して、駐車枠検出部14、駐車枠接触検出部40、ならびに描画制御部20Bに代えて描画制御部20Cを備えた点が異なる。
そして、メモリ29には自車両アイコンMc、実施例1で説明した各種の案内指標(44、46、47、80〜84)に加えて、本実施例2で用いる現在旋回中心点アイコン56の各画像データが格納される。各アイコンの画像データは予め設定されてメモリ29に格納されている。
駐車枠検出部14は、俯瞰画像作成部12Bに接続されて、俯瞰画像を画像処理して枠線Hを抽出して枠線Hで区画される駐車枠Sを検出する。
駐車枠接触検出部40には、駐車枠検出部14とメモリ29が接続され、駐車枠検出部14で検出された駐車枠Sに、俯瞰画像に表示された自車両アイコンMcの一部が入ったことを検出し、描画制御部20Cへ送信する。
描画制御部20Cは、駐車支援起動スイッチ3Bがオンされたときに起動し、メモリ29に格納された画像データを重畳画像合成部13Bへ送るとともに、その画像データに基づくアイコンの配置を制御する。更に、描画制御部20Cは、駐車枠接触検出部40で自車両アイコンMcと駐車枠Sとの接触が検出された場合には、自車両前方の一部の案内指標をモニタ8の画面表示から削除する。
他の構成は、図1に示した実施例1と同様である。
図30はコントロールユニット10Cにおける制御処理の流れを示すフローチャートである。
まず、ステップ400において、カメラ2を撮像開始させ、路面を撮像させる。
ステップ401では、俯瞰画像作成部12Bが、視点変換部11Bを経た撮像信号(画像信号)をもとに自車両周囲の俯瞰画像を作成する。
ステップ402では、駐車枠検出部14が、俯瞰画像を画像処理して駐車枠Sを検出する。
ステップ403では、現在位置における自車両の最小回転半径に基づく右側の現在旋回中心点Prを設定する。
ステップ404では、描画制御部20Cがメモリ29から自車両アイコンMc、運転者のスイッチ操作によって選択された案内指標、現在旋回中心点アイコン56の画像データを読み出し、ステップ405において、重畳画像合成部13Bに対して俯瞰画像へのアイコン重畳を行なわせる。これにより、モニタ8には駐車支援のための画像として、自車両周囲の俯瞰画像に自車両等のアイコンが重畳されて表示される。
ステップ406では、ステップ402で検出した駐車枠Sと、ステップ405で重畳した自車両アイコンMcとの位置関係を監視し、駐車枠Sの左右線の間に自車両アイコンMcの一部が入った(接触)か否かを判断する。判別の結果、自車両アイコンMcが駐車枠Sと接触した場合には、ステップ407へ進み、接触していない場合にはステップ406を繰り返して両者の接触を監視する。
ステップ407では、自車両の一部が駐車枠Sに入っているため、周囲との接触確認が不要となった案内指標(44、若しくは82、83、84)をモニタ8の表示から削除する。
ステップ408では、駐車支援起動スイッチ3Bがオフされたか否かを監視し、オフされた場合にはステップ409で自車両アイコンMc、及び現在旋回中心点アイコン56の表示を消して処理を終了する。一方、ステップ408において、駐車支援起動スイッチ3Bがオフされない場合には処理を継続する。
次に、図31〜図33を参照して、駐車支援起動スイッチ3Bの並列後退駐車用のスイッチノブ34が操作された場合の使い方を説明する。
先ず、先の図15〜図17に示すと同様の状態を経た後、図31は自車両の位置から駐車枠検出部14で検出した駐車枠(左右の駐車枠線からなる長方形)と、自車両アイコンMcとが接触した状態を示す。即ち、駐車枠71の左右駐車枠線端を結ぶ直線と、自車両アイコンMcとが接触(若しくは、所定画素数以上が上記直線を超えた)したことを、駐車枠接触検出部40によって検出された状態である。
図32は図31と同じ自車両位置ではあるが、前部の案内指標44をモニタ表示から消した状態を示す。自車両の後部が左右の駐車枠線間に入ったため、それまで注意していた前部の案内指標44については障害物をパスした状態となる、ゆえに、以降の操作で注意資源を投入すべき個所としての後部の案内指標46に注力させる意味をこめて、前部の案内指標44を表示から消して、後部の案内指標46のみを表示させる。
図33は図32の位置から更に後退した状態で駐車枠線と平行になり停車した状態を示す。
次に、図34〜図37を参照して、駐車支援起動スイッチ3Bの並列前進駐車用のスイッチノブ32が操作された場合の使い方を説明する。
先ず、先の図21〜図23に示すと同様の状態を経た後、図34は図21に示す自車両位置から前進し、駐車枠検出部14で検出した駐車枠(左右の駐車枠線からなる長方形)と、自車両アイコンMcとが接触した状態を示す。即ち、駐車枠71の左右駐車枠線端を結ぶ直線と、自車両アイコンMcとが接触(若しくは、所定画素数以上が上記直線を超えた)したことを、駐車枠接触検出部40によって検出された状態である。
図35は図34と同じ自車両位置ではあるが、前部の案内指標82、83、84をモニタ表示から消し、自車両端部の破線で表示された案内指標80、81を実線で表示された案内指標90、91に変更した状態を示す。
並列前進駐車用の案内指標については、先端部に自車両大の形状があるため、自車両の前進に伴って駐車枠71に設定した自車両大の案内指標82〜84も移動してしまい停車部位がわかりずらくなる。ゆえに、前進時に障害物との接触を確認するための軌跡線となる案内指標90、91はモニタ表示に残して、停車位置がわかりずらくなる原因となる案内指標82〜84をモニタ表示から削除する。
図36、図37は先の図24、図25と同じ自車両位置ではあるが、自車両大の案内指標82〜84を表示しない状態を示す。
本実施例2は以上のように構成され、カメラ2で撮像した自車両周囲状況を真上から見た俯瞰画像としてモニタ8に表示するとともに、現在位置における自車両の最小回転半径での右側(進入路側)の現在旋回中心点Prを求め、俯瞰画像にそれぞれ扇形状の要を現在旋回中心点Prにおいた各種の案内指標を俯瞰画像に重畳して表示するので、駐車枠S内まで他との干渉なしに進入可能であるか否かをモニタ8の画面上で容易に確認することができる。
これにより、運転者は並列や縦列といった駐車の形態に応じた適切な案内指標の案内指標を選択して参照することで、運転者は容易に駐車を行うことが可能となる。したがって、本実施例2の装置においては、運転者に対して的確かつ十分に駐車支援を行うことができる。
また、駐車枠の位置を検出し、自車両アイコンが駐車枠に接触しているか否かを監視することで、駐車枠に自車両が移動する状況を的確かつ詳細に運転者に認知させることが可能となり、駐車支援能力を向上させることができる。
さらに、駐車支援の過程において、不要になった案内指標をモニタ画面から消去することで、運転者の注意をモニタ画面に表示されて今後の駐車支援に有用となる案内指標に集中させることが可能となり、駐車支援能力を向上させることができる。
次に、本発明の実施例3について説明する。
図38は実施例3に係る駐車支援装置の構成を示すブロック図である。
この実施例3で採用した駐車支援装置1Dのコントロールユニット10Dは、先の実施例1におけるコントロールユニット10Bに対して、舵角センサ4ならびに最大転舵判断部23、ならびに描画制御部20Bに代えて描画制御部20Dを備えた点が異なる。
舵角センサ4は不図示のステアリングシャフトに付設されて、ステアリングハンドルの操舵方向と操舵角を検出する。
最大転舵判断部23には舵角センサ4が接続され、ハンドルが右、若しくは、左一杯に操舵されたことを検出して、描画制御部20Dへ送信する。
描画制御部20Dは、駐車支援起動スイッチ3Bがオンされたときに起動し、メモリ29に格納された画像データを重畳画像合成部13Bへ送るとともに、その画像データに基づくアイコンの配置を制御する。
更に、最大転舵判断部23でハンドルが右、若しくは、左一杯に操舵されたことが検出された場合には、自車両前方の一部の案内指標をモニタ8から消す。
他の構成は、図1に示した実施例1と同様である。
図39はコントロールユニット10Dにおける制御処理の流れを示すフローチャートである。
まず、ステップ500において、カメラ2を撮像開始させ、路面を撮像させる。
ステップ501では、俯瞰画像作成部12Bが、視点変換部11Bを経た撮像信号(画像信号)をもとに自車両周囲の俯瞰画像を作成する。
ステップ502では、現在位置における自車両の最小回転半径に基づく右側の現在旋回中心点Prを設定する。
ステップ503では、描画制御部20Dがメモリ29から自車両アイコン、運転者のスイッチ操作によって選択された案内指標、現在旋回中心点アイコン56の画像データを読み出し、ステップ504において、重畳画像合成部13Bに対して俯瞰画像へのアイコン重畳を行なわせる。これにより、モニタ8には駐車支援のための画像として、自車両周囲の俯瞰画像に自車両等のアイコンが重畳されて表示される。
ステップ505では、最大転舵判断部23が舵角センサ4の出力を監視する。
ステップ506では、最大転舵判断部23でハンドルが右、若しくは、左一杯に操舵されたか否かを判断する。判別の結果、最大転舵が検出された場合はステップ507へ進み、最大転舵が検出されない場合には、ステップ506を繰り返し最大転舵に操作されるのを監視する。
ステップ507では、駐車したい駐車枠71に設定され、且つそちらへ向けた最大転舵操作が行われた状態であるため、周囲との接触確認が不要となった案内指標(82、83、84)をモニタ表示から消す。
ステップ508では、駐車支援起動スイッチ3Bがオフされたか否かを監視し、オフされた場合にはステップ509で自車両アイコンMc、及び現在旋回中心点アイコン56の表示を消して処理を終了する。一方、ステップ508において、駐車支援起動スイッチ3Bがオフされない場合には処理を継続する。
次に、図40〜図43を参照して、駐車支援起動スイッチ3Bの並列前進駐車用のスイッチノブ32が操作された場合の使い方を説明する。
先ず、先の図21〜図22に示すのと同様の状態を経た後、図40は図22で示す位置からハンドルを中立状態に保持したまま前進し、停車した状態を示す。
図41は図40の車両位置と同じではあるが、図40の位置に停車した状態でハンドルを左いっぱいに切った状態、即ち、舵角センサ4を監視する最大転舵判断部23が最大転舵であることを検出した状態を示す。最大転舵を検出した描画制御部20Dは前部の案内指標の先端部で略自車大の案内指標82、83、84をモニタ表示から消し、自車両端部の案内指標については、破線表示の案内指標80、81を実線表示の案内指標90、91に変更した状態を示す。
並列前進駐車用の案内指標については、先端部に自車両大の形状があるため、自車両の前進に伴って駐車枠に設定した自車両大の案内指標も移動してしまい停車部位がわかりずらくなる。なお、先の実施例2では自車両アイコンMcが駐車枠線間に接触する迄のわずかな間でも自車両大の案内指標が移動し、最終駐車位置を設定したにも関わらず、該目標位置が動いてしまい煩わしかった。
ゆえに、本実施例3では、前進時に障害物との接触を確認するための案内指標90、91はモニタ表示に残して、停車位置がわかりずらくなる原因となる自車両大の案内指標80〜84をモニタ8の表示画面から削除した。
図42は図36、図43は図37と同様であり、自車両大の案内指標を表示しない状態を示す。
本実施例3は以上のように構成され、カメラ2で撮像した自車両周囲状況を真上から見た俯瞰画像としてモニタ8に表示するとともに、現在位置における自車両Mcの最小回転半径での右側(進入路側)の現在旋回中心点Prを求め、俯瞰画像にそれぞれ案内指標を俯瞰画像に重畳して表示するので、駐車枠S内まで他との干渉なしに進入可能であるか否かをモニタ8の画面上で容易に確認することができる。
これにより、運転者は並列や縦列といった駐車の形態に応じた適切な案内指標の案内指標を選択して参照することで、運転者は容易に駐車を行うことが可能となる。したがって、本実施例3の装置においては、運転者に対して的確かつ十分に駐車支援を行うことができる。
また、自車両の舵角により最大転舵を判別し、その判別結果に基づいて今後の駐車支援に不要となる案内指標をモニタ画面から削除するようにしたので、モニタ画面に表示されて今後の駐車支援に必要となる案内指標に運転者の注意を集中させることが可能となり、駐車支援能力を向上させることができる。
次に、本発明の実施例4について説明する。
図44は、実施例4に係る駐車支援装置1の構成を示すブロック図である。
駐車支援装置1は、コントロールユニット10に対して、カメラ2(2a、2b、2c、2d)、駐車支援起動スイッチ3、舵角センサ4、インヒビタスイッチ5、ヨーレートセンサ6、車輪速センサ7、モニタ8、およびスピーカ9が接続されて構成され、特に縦列駐車を支援する。
カメラ2は車両の4隅または4辺にそれぞれ設置された複数台からなり、自車両周囲の所定距離範囲、例えば5mの範囲の路面を撮像して、撮像信号をコントロールユニット10へ出力する。
舵角センサ4は不図示のステアリングシャフトに付設されて、ステアリングハンドルの操舵方向と操舵角を検出する。
インヒビタスイッチ5は不図示のシフトレバーの操作に連動して、シフトポジションを検出する。
ヨーレートセンサ6は自車両が旋回するときの車両前後方向軸の角度変化速度を検出する。
車輪速センサ7は車輪あるいはプロペラシャフト周辺に設置されて、車輪回転速度を検出するが、その出力を基に自車両の前進、後退の別、および進行距離を求めることができる。
モニタ8は、インストルメントパネルに設置され、スピーカ9は車室内に設置されて、それぞれコントロールユニット10の出力により支援情報を画像表示、音声出力する。モニタ8としては液晶やCRTなど適宜選択可能である。
コントロールユニット10は、内部メモリを備えたCPUで構成され、以下の機能部位を有する。
すなわち、視点変換部11は、カメラ2からの画像信号による画像フレームが、カメラ光軸を路面に垂直にした視点からの画像フレームになるように、画素を並べ替えた画像信号へ変換する。
俯瞰画像作成部12は各カメラ2の視点変換された画像信号をもとに画像合成して、自車両の直上から見た自車両周囲の俯瞰画像を作成する。
図45は自車両の側方に駐車枠Sを区画する枠線Hがある場合の俯瞰画像例を示す。
なお、本実施例4は、自車両の進行方向に対して左側の駐車枠に駐車しようとする場合について説明する。
枠線Hは、駐車枠Sの並びを示す駐車枠線、壁面、あるいは駐車車両の列を象徴化して示している。破線で示した領域は自車両の位置であり、ここには後述する自車両アイコンが重畳される。
自車両周囲の俯瞰画像は重畳画像合成部13へ送られる。
俯瞰画像作成部12には駐車枠検出部14が接続され、俯瞰画像を画像処理して枠線Hを抽出し、枠線Hで区画される駐車枠Sを検出する。
駐車位置設定部15は、検出された駐車枠S内に自車両が最終的に位置すべき最終駐車位置を設定する。ここで最終駐車位置は、自車両の車両前後方向軸を基準にして、車体後端を駐車枠の後端から例えば10〜20cmに位置させ、車両前後方向軸を駐車枠Sの幅中央に位置させるように設定される。
最終旋回中心設定部16は、図46に示すように駐車枠Sに最終的に位置したときの、すなわち最終駐車位置の自車両(Mf)の最小回転半径に基づく最終旋回中心点Pfを設定する。最終旋回中心点Pfは自車両の後輪アクスルの延長線上に位置し、路面上では、左右の後輪Wl、Wrの接地点を通る直線上に位置する。
俯瞰画像作成部12にはさらに、自車位置検出部17を経て旋回中心検出部18が接続されている。
自車両の現在位置は俯瞰画像の基準位置であるが、最終旋回中心点を基準としたときの移動する自車両およびその現在旋回中心点の位置を定めるため、自車位置検出部17は俯
瞰画像上の最終旋回中心点に対する自車両の相対的な位置を検出する。
旋回中心検出部18は、図46に示すように、現在位置における自車両(Mc)の最小回転半径に基づく右側の現在旋回中心点Pcrを検出する。
現在旋回中心点Pcrも自車両の左右後輪の接地点を通る直線上に位置する。
旋回角度演算部19は最終旋回中心点Pfと現在旋回中心点Pcrの情報を描画制御部20へ転送するとともに、図46に示すように、最終旋回中心点Pfと現在旋回中心点Pcrを結ぶ直線50’を演算し、その直線50’と現在位置における自車両の車両前後方向軸CLとの角度差αを求めてヨー角変化監視部21へ出力する。
メモリ29には、モニタ8に表示する自車両、自車両の車両前後方向軸線、前部最外周のシールドおよび後部最外周のシールド、最終旋回中心点と現在旋回中心点の各アイコンの画像データが格納されている。
図47にこれらの画像データに基づくアイコン例を示す。
車両前後方向軸線アイコン51は、(a)に示すように、自車両Mの車幅中央位置を通る直線である。
前部最外周の案内指標44は、(b)に示すように、自車両の右側の旋回中心点prを中心(要)として、自車両Mの車体の左前端を通る旋回円軌跡の1/4の円弧を外縁とする扇形状をなしている。
後部最外周の案内指標46は、(c)に示すように、同じ旋回中心点prを中心(要)として、自車両後端部を通る旋回円軌跡の1/4の円弧を外縁とする扇形状をなしている。
なお、後部最外周の案内指標46は旋回時の自車両車体後部の通過領域を示すものであるから、その外縁は、前部最外周の案内指標44と同様に車体の左後端を通るものとしてもよいが、ここでは簡単のため左後輪Wlの接地点を通るものとしている。したがって、外縁が旋回外側の後輪の接地点から左後端の間を通る円上の円弧であれば後部最外周の案内指標として適当である。
前部最外周の案内指標44と後部最外周の案内指標46は、それぞれ外縁部分が強調されるように、要から外縁へ向かうほどに濃くなるようにグラデーションが施されているとともに、半透明で他の画像の上に重なったときでも当該他の画像も認識可能となるように設定される。
最終旋回中心点アイコン54と現在旋回中心点アイコン56(図51参照)は、それぞれ点をイメージさせる小径の円形状である。
自車両の形状、サイズや上記案内指標のサイズ等は、車両の仕様によって定まる固有のものであるから、各アイコンの画像データは予め設定されてメモリ29に格納されている。
図44に戻り、描画制御部20は、駐車支援起動スイッチ3がオンされたときに起動し、メモリ29に格納されたアイコンの画像データを重畳画像合成部13へ送るとともに、旋回角度演算部19を経て入力される最終旋回中心点と現在旋回中心点の情報に基づいて各アイコンの配置を制御する。
重畳画像合成部13は、俯瞰画像作成部12、描画制御部20および後述のメッセージ制御部30に接続され、自車両周囲の俯瞰画像上に、上記自車両アイコンや案内指標、および後述の支援メッセージを重ねた重畳画像を作成し、モニタ8に当該重畳画像を表示させる。
ヨー角変化監視部21は、ヨーレートセンサ6および車輪速センサ7からの出力に基づいて、旋回角度演算部19で求められた直線50’と自車両の車両前後方向軸CLとの角度関係を監視し、自車両の移動に伴って重畳画像における上記直線50’と車両前後方向軸CLの角度が一致するタイミングを監視する。
アイコン状態判断部22は、重畳画像において最終旋回中心点Pfに配置された最終旋回中心点アイコン54と現在旋回中心点Pcrに配置された現在旋回中心点アイコン56が重なったかどうか、最終駐車位置の自車両アイコンMfに現在位置の自車両アイコンMcが重なったかどうかを判断する。アイコン状態判断部22はまた、所定のタイミングで前部最外周のシールドおよび後部最外周の案内指標44、46と枠線Hとの接触状態を判断する。
ヨー角変化監視部21およびアイコン状態判断部22における監視、判断検出結果はメッセージ制御部30へ送られる。
最大転舵判断部23は、舵角センサ4の出力を監視し、自車両が最大転舵状態、すなわち最小回転半径で前進または後退可能になった状態とその転舵方向を判断して、メッセージ制御部30へ判断結果を送る。
メッセージ制御部30は、ヨー角変化監視部21による角度関係、アイコン状態判断部22によるアイコン状態、最大転舵判断部23による最大転舵状態か否か、およびインヒビタスイッチ5からのシフトポジション等に基づいて、所定のタイミングで、重畳画像合成部13へ支援情報としての支援メッセージを送り、モニタ8の画像に支援メッセージを重畳表示させる。メッセージ制御部30はまた音声提示に適した支援メッセージをスピーカ9に送って音声出力させる。
なお、支援メッセージは本実施の形態を通じて、以下、単にメッセージと略称する。
図48、図49、図50はコントロールユニット10における制御処理の流れを示すフローチャートである。
制御は、運転者が駐車枠を視認して車両後部が駐車枠の前端付近になる位置で停車し、駐車支援起動スイッチ3がオンされることにより開始する。最初の停車位置は厳密でなくてよい。
まず、ステップ100において、カメラ2を撮像開始させ、路面を撮像させる。
ステップ101では、俯瞰画像作成部12が、視点変換部11を経た撮像信号(画像信号)をもとに自車両周囲の俯瞰画像を作成する。
ステップ102では、駐車枠検出部14が、俯瞰画像を画像処理して駐車枠Sを検出する。
続いて、ステップ103において、駐車位置設定部15が駐車枠Sにおける最終駐車位置を設定する。
そして、ステップ104において、最終旋回中心設定部16が、検出された駐車枠Sにおける最終駐車位置での最小回転半径に基づく車両の右側(進入路側)の最終旋回中心点Pfを設定する。
ステップ105において、自車位置検出部が最終旋回中心点Pfに対する自車両の位置を検出して、ステップ106で、旋回中心検出部18が現在位置における自車両の最小回転半径に基づく右側の現在旋回中心点Pcrを設定する。
ステップ107では、旋回角度演算部19が、先の図46に示すように、最終旋回中心点Pfと現在旋回中心点Pcrを通る直線50’を演算し、現在位置における自車両の車両前後方向軸CLとの角度差αを算出する。なお、図46には理解を容易にするためアイコンと同形状の自車両(Mc)を示している。
ステップ108において、描画制御部20がメモリ29から自車両アイコン、車両前後方向軸線アイコン、最終旋回中心点アイコンと現在旋回中心点アイコンの画像データを読み出し、ステップ109において、重畳画像合成部13に対して俯瞰画像へのアイコン重畳を行なわせる。また、最終旋回中心点Pfと現在旋回中心点Pcrの間を結ぶガイド直線50を重畳させる。これにより、モニタ8には駐車支援のための画像として、自車両周囲の俯瞰画像に自車両等のアイコンが重畳されて表示される。
図51は、このときのモニタ8の画面表示を示す。
すなわち、枠線Hで区画された駐車枠Sを示す俯瞰画像において、実線で示すように現在位置での自車両アイコンMcが表示されるとともに、駐車枠Sの最終駐車位置に位置したとしたときの自車両アイコンMfが破線で表示される。
現在位置での自車両アイコンMcには車両前後方向軸線アイコン51が重ねられる。
なお、最終駐車位置に位置する自車両アイコンMfは図示の破線のほか、細線あるいは低濃度で現在位置での自車両アイコンMcと識別可能に表示されてもよい。
そして、現在位置での自車両アイコンMcの最小回転半径での右側の現在旋回中心点Pcrに現在旋回中心点アイコン56が表示されるとともに、最終駐車位置に位置したとしたときの自車両アイコンMfの最小回転半径での右側の最終旋回中心点Pfに最終旋回中心点アイコン54が表示され、現在旋回中心点アイコン56と最終旋回中心点アイコン54間がガイド直線50で結ばれている。
なお、旋回中心点アイコン54、56を自車両アイコンMf、Mcの後輪に図示のように破線等でつなぐと、旋回中心点であることがわかりやすい。
続くステップ110において、メッセージ制御部30が「停止してください」との音声メッセージをスピーカ9から出力させる。また、音声メッセージと同時に、重畳画像合成部13を介して同趣旨の文字メッセージをモニタ8の画面に表示させる。
なお、以下では、メッセージの出力先であるモニタ8とスピーカ9についてはとくに個別に言及せず、単に「メッセージを出力させる」旨、簡単に記載する。
ステップ111では、ヨー角変化監視部21が、車輪速センサ7の出力をチェックして、自車両が停止していることを確認すると、その旨をメッセージ制御部30へ通知する。
ヨー角変化監視部21はこの時点において旋回角度演算部19で算出された直線50’と車両前後方向軸CLとの角度差αを保持する。
ステップ112において、メッセージ制御部30が、ステップ110で出力させたメッセージを消し、「右いっぱいにハンドルを切ってください」など、右最大転舵を行なうべき旨のメッセージを出力させる。
ステップ113において、メッセージ制御部30は最大転舵判断部23からの出力により自車両が左方向の最大転舵状態になっているかどうかをチェックする。
上記チェックを繰り返して、最大転舵状態になると、ステップ114へ進んで、メッセージ制御部30は、先のメッセージをモニタ8から消して、「前進してください」のメッセージを出力させる。
これらメッセージを受けて運転者は右最大転舵で自車両を前進させる。運転者は、モニタ画面において、自車両の車両前後方向軸線アイコン51の向きが現在旋回中心点アイコン56と最終旋回中心点アイコン54間のガイド直線50に近づいていくのを確認することができる。
ステップ115において、ヨー角変化監視部21は、ヨーレートセンサ6から出力される角速度を時間積分して自車両の車両前後方向軸CLの角度変化量を求め、その角度変化
量が自車両が停止しているときに保持した角度差αに至った(現在位置での角度差=0)かどうかをチェックする。
前進による角度変化量が上記角度差に至るまで上記チェックを繰り返し、角度変化量が角度差に一致したときに、ステップ116へ進む。
このときのモニタ画面の表示は図52に示すようになる。
なお、俯瞰画像はカメラ2で撮像した自車両の周囲であるから、モニタ8では自車両アイコンMcを画面中央に位置させて表示するのが画像処理上は簡便であるが、駐車支援起動スイッチ3がオンされた時点で最初に生成される俯瞰画像における駐車枠Sを含む周囲画像を固定し、モニタ画面では相対的に現在位置の自車両アイコンMcの位置が変化する表示としてもよい。
図52では、図51のモニタ画面に対して理解を容易とするため周囲画像を固定して示している。実施の形態を通じて、以下同様である。
ステップ116では、メッセージ制御部30が、ステップ113で出力させたメッセージを消し、「停止してください」のメッセージを出力させる。
次のステップ117において、ヨー角変化監視部21が、車輪速センサ7の出力をチェックして、自車両が停止していることを確認すると、その旨をメッセージ制御部30へ通知する。
これに応じて、ステップ118では、メッセージ制御部30が、ステップ116で出力させたメッセージを消し、「ハンドルを中立位置にして後退してください」など、中立転舵後後退すべき旨のメッセージを出力させる。
この際、モニタ8の画面に重畳表示されたガイド直線50は後退方向の指標となる。
ステップ119において、メッセージ制御部30は、インヒビタスイッチ5の出力からRレンジ(後退)のシフトポジションが選択されたかどうかをチェックする。
Rレンジが選択されて自車両が後退すると、図53に示すように、現在旋回中心点Pcrは最終旋回中心点Pfに近づいてゆき、最終旋回中心点Pf(最終旋回中心点アイコン54)と現在旋回中心点Pcr(現在旋回中心点アイコン56)を結ぶガイド直線50は俯瞰画像上において短くなっていく。
上記チェックを繰り返して、Rレンジの選択状態になると、ステップ120へ進み、メッセージ制御部30は、アイコン状態判断部22の出力により、重畳画像における現在旋回中心点アイコン56が最終旋回中心点アイコン54に重なったかをチェックする。
現在旋回中心点アイコン56と最終旋回中心点アイコン54が重なれば、現在旋回中心点Pcrと最終旋回中心点Pfが重なったことを意味し、この位置からは最終旋回中心点Pfまわりに最小回転半径で旋回すれば最終駐車位置へ到達可能となる。
現在旋回中心点アイコン56が最終旋回中心点アイコン54に重なるまで上記のチェックを繰り返し、図54に示すように両アイコンが重なると、ステップ121において、メッセージ制御部30は、ステップ118で出力させたメッセージを消し、「停止してください」のメッセージを出力させる。
また、ステップ122では、描画制御部20が、上記両アイコン54、56が重なった旨のアイコン状態判断部22からの出力に応じて、車両前後方向軸線アイコン51と最終旋回中心点アイコン54の表示を消す。なお、両アイコンが重なった時点において、ガイド直線50も消えている。
続いてステップ123において、描画制御部20はメモリ29から前部最外周の案内指標44と後部最外周の案内指標46の画像データを読み出し、ステップ124において、駐車枠S周囲との干渉有無の確認のため、重畳画像合成部13に対して俯瞰画像へのアイコン重畳を行なわせる。
ここでは、図55のモニタ画面に示すように、前部最外周の案内指標44はその扇形状の要を現在位置の自車両アイコンMcの左右後輪の接地点を通る直線K上にある現在旋回中心点Pcrに一致させ、扇形状の左辺を上記直線Kにそわせて配置される。また、後部最外周の案内指標46は扇形状の要を現在旋回中心点Pcrに一致させ、扇形状の右辺を上記直線Kにそわせて配置される。
前部最外周の案内指標44と後部最外周の案内指標46は半透明であるから、自車両アイコンMc、Mfは透過視認できる。
つぎのステップ125では、アイコン状態判断部22が、駐車枠Sを区画する枠線Hと前部最外周の案内指標44または後部最外周の案内指標46とが干渉する(重なる)かどうかを判断し、判断結果をメッセージ制御部30へ出力する。
図56の(a)に示すように、モニタ画面において、駐車枠Sの前端側における枠線Hの角部と前部最外周の案内指標44とが干渉している場合、または自車両Mcがガイド直線50と平行に移動しなかったなどの原因で、現在旋回中心点アイコン56と最終旋回中心点アイコン54とは重なったが、現在旋回中心点Pcrが最終旋回中心点Pfからずれて、(b)に示すように、駐車枠Sの側壁と後部最外周の案内指標46とが干渉しているような場合は、ステップ134へ進んで、メッセージ制御部30は、ステップ121で出力させたメッセージを消して、「この駐車枠には駐車案内できません」など、駐車案内不可のメッセージを出力させる。
このあとは後述するステップ135へ進む。
一方、ステップ125の判断において、図55のように、前部最外周の案内指標44および後部最外周の案内指標46のいずれも枠線Hと干渉しない場合は、ステップ126へ進む。
ステップ126では、メッセージ制御部30が、ステップ121で出力させたメッセージを消して、「右いっぱいにハンドルを切ってください」など、右最大転舵を行なうべき旨のメッセージを出力させる。
ステップ127において、メッセージ制御部30は、最大転舵判断部23からの出力により自車両が右方向の最大転舵状態になっているかどうかをチェックする。
上記チェックを繰り返して、最大転舵状態になると、ステップ128へ進んで、メッセージ制御部30は、ステップ126で出力させたメッセージをモニタ8から消して、「後退してください」のメッセージを出力させる。併せて、ステップ129において、メッセージ制御部30からの指示に基づいて、描画制御部20が重畳画像合成部13に対して、前部最外周の案内指標44と後部最外周の案内指標46の表示を消させる。
ステップ130では、メッセージ制御部30は、あらためてインヒビタスイッチ5の出力からRレンジ(後退)のシフトポジションが選択されたかどうかをチェックする。
Rレンジが選択されて後退していくと、自車両は駐車枠S内の最終駐車位置へ近づいていくことになる。
上記チェックを繰り返して、Rレンジの選択状態になったあと、ステップ131では、メッセージ制御部30はアイコン状態判断部22の出力により、自車両が最終駐車位置に位置したかどうかをチェックする。
後退に伴って、モニタ8には駐車枠S内へ進入していく自車両アイコンMcが表示されるので、運転者は、図57に示すように、駐車枠S内に位置した破線の自車両アイコンMfに実線の自車両アイコンMcが重なったモニタ表示からも、駐車枠Sの最終駐車位置に到達したことを知ることができる。
自車両が最終駐車位置に到達すると、ステップ132において、メッセージ制御部30は、ステップ128で出力させたメッセージをモニタ8から消して、「駐車が完了しました」のメッセージを出力させる。
このとき、さらに自車両アイコンMcの表示色を変えたり、あるいは点滅させてもよい。
このあと、ステップ133へ進んで、こんどはPレンジ(パーキング)のシフトポジションが選択されたかどうかをチェックする。これは、運転者が車両停止させたことを確認するものである。
Pレンジ選択状態になるまでステップ133を繰り返したあと、ステップ135において、メッセージ制御部30が、重畳画像合成部13を制御して、モニタ8の全表示を消して処理を終了する。
また上記フローのどの段階でも駐車支援起動スイッチ3がオフされると処理は中止され、駐車支援の制御は終了する。
本実施例4おいては、図48〜図50のフローチャートにおけるステップ101が発明における俯瞰画像作成手段を構成し、ステップ102が駐車枠検出手段を、ステップ103が最終駐車位置設定手段を、ステップ104が第1旋回点設定手段を、ステップ105が現在位置検出手段を、そしてステップ106が第2旋回点設定手段を構成している。
最終旋回中心点が第1の旋回点に該当し、現在旋回中心点が第2の旋回点に該当する。
ガイド直線50が第1の旋回点と第2の旋回点を通る直線に該当し、車両前後方向軸線アイコン51が車両前後方向軸を示す画像に該当する。
また、ステップ108、109、122〜124、129が重畳画像合成手段を構成し、ステップ107が角度差演算手段を、ステップ115がヨー角変化監視手段を、ステップ120が旋回点状態判断手段を、そしてステップ110〜114、116〜118、121、126〜128、130〜132、134が支援情報制御手段を構成している。
モニタ8とスピーカ9がメッセージ提示手段に該当する。
本実施例4は以上のように構成され、カメラ2で撮像した自車両周囲状況を真上から見た俯瞰画像としてモニタ8に表示するとともに、俯瞰画像から検出した駐車枠S内に自車両が最終的に位置すべき最終駐車位置を設定して、最終駐車位置における自車両Mfの最小回転半径での右側(進入路側)の最終旋回中心点Pfを求め、また現在位置における自車両Mcの最小回転半径での右側(進入路側)の現在旋回中心点Pcrを求め、俯瞰画像に最終旋回中心点Pfと現在旋回中心点Pcrを結ぶガイド直線50を重畳合成するものとしたので、運転者はモニタ画面のガイド直線50を参照して、駐車枠Sへの進入角度を容易に把握することができる。
また、自車両Mcの車両前後方向軸線アイコン51も俯瞰画像に重畳させることにより、車両前後方向軸線アイコン51を参照して自車両をガイド直線50と平行にもっていく操作が容易となり、駐車枠Sへ向かう間の方向保持の確認も容易となる。
とくに、自車両の車両前後方向軸CL(車両前後方向軸線アイコン51)と直線50’(ガイド直線50)が平行になった位置において、中立転舵のうえ後退させるメッセージを出力するので、転舵のタイミングがいっそう正確となる。
また、その後、最終旋回中心点アイコン54と現在旋回中心点アイコン56が重なった位置において、現在旋回中心点Pcrを旋回中心とする方向に最大転舵のうえ後退させる旨の支援メッセージを出力するので、最終段階移動として、最小回転半径で最終駐車位置へ到達することができる。
さらに、最終旋回中心点アイコン54と現在旋回中心点アイコン56が重なったときに、最終駐車位置への最終段階移動開始の後退をさせる前、すなわち最大転舵のうえ後退させるメッセージを出力する前に、それぞれ扇形状の要を現在旋回中心点Pcrにおいた前部最外周の案内指標44と後部最外周の案内指標46を俯瞰画像に重畳して表示するので、駐車枠S内の最終駐車位置まで他との干渉なしに進入可能であるかをモニタ画面上で容易に確認することができる。
なお、俯瞰画像に重畳されるガイド直線50は最終旋回中心点アイコン54と現在旋回中心点アイコン56の間を結ぶものとしたが、これに限定されず、適宜両方向に延ばしてもよい。
車両前後方向軸線アイコン51の長さも同様に任意に設定してよい。
また、制御フローのステップ120では、現在旋回中心点Pcrと最終旋回中心点Pfが重なったことを、現在旋回中心点アイコン56と最終旋回中心点アイコン54の重なりを判断するアイコン状態判断部22の出力によりチェックするものとしたが、アイコンの重なりではなく、旋回角度演算部19を介して得られる現在旋回中心点Pcrと最終旋回中心点Pfの直接情報を用いてこれらの旋回中心点が一致するタイミングを判断するようにしてもよい。
次に、本発明の実施例5について説明する。
図58は、実施例5に係る駐車支援装置の構成を示すブロック図である。
駐車支援装置1Aのコントロールユニット10Aは、先の実施例4におけるコントロールユニット10に対して、旋回中心検出部18、描画制御部20、ヨー角変化監視部21、アイコン状態判断部22、メッセージ制御部30の代わりに、それぞれ旋回中心検出部18A、描画制御部20A、ヨー角変化監視部21A、アイコン状態判断部22A、メッセージ制御部30Aを備える点が異なる。
さらに、旋回角度演算部19の代わりに進入角度演算部26を備え、最終旋回中心設定部16と進入角度演算部26の間に接線演算部25、旋回中心検出部18Aと接線演算部25の間に円弧設定部24を有している。
そして、メモリ29には第1の実施例におけると同じ自車両アイコンMc、Mf、前部最外周の案内指標44および後部最外周の案内指標46、車両前後方向軸線アイコン51、最終旋回中心点アイコン54および現在旋回中心点アイコン56と、さらに円弧アイコン60の各画像データが格納される。
各アイコンの画像データは予め設定されてメモリ29に格納されている。
描画制御部20Aは、駐車支援起動スイッチ3がオンされたときに起動し、メモリ29に格納された画像データを重畳画像合成部13へ送るとともに、その画像データに基づくアイコンの配置を制御する。
また、旋回中心検出部18Aは、現在位置での左右の現在旋回中心点PclとPcrを検出する。
円弧設定部24は、図59に示すように、自車両(Mc)の最小回転半径に基づく左側(駐車枠側)の現在旋回中心点Pclと右側(進入路側)の現在旋回中心点Pcr間の距離を半径とする円の1/2の円弧60’を設定するもので、左側の現在旋回中心点Pclを中心とした右側の現在旋回中心点Pcrの旋回軌跡を表わしている。円弧設定部24は円弧60’が現在旋回中心点Pcrを始点として後方へ延びるように設定する。
メモリ29に画像データが格納される円弧アイコン60はこの円弧60’に対応するものである。
接線演算部25は、最終旋回中心点Pfを通り円弧60’に接する接線52’を演算し、当該接線52’と円弧60’との接点Gの位置を算出する。
進入角度演算部26は、接線52’の傾きを駐車枠Sへの進入角度として演算する。また、接線演算部25を介して入手した最終旋回中心点Pf、現在旋回中心点Pcl、Pcrや円弧60’の設定位置、接点Gの位置などの情報を描画制御部20Aへ転送する。
ヨー角変化監視部21Aは、ヨーレートセンサ6および車輪速センサ7からの出力に基づいて、進入角度演算部26で求められた接線52’と自車両の車両前後方向軸CLとの角度関係を監視し、自車両の移動に伴って重畳画像における上記接線52’と車両前後方向軸CLの角度が一致するタイミングを監視する。
ヨー角変化監視部21Aにおける監視結果はメッセージ制御部30Aへ送られる。
メッセージ制御部30A、アイコン状態判断部22Aの動作については、後述の制御処理において説明する。
他の構成は図44に示した実施例4と同じである。
図60、図61、図62はコントロールユニット10Aにおける制御処理の流れを示すフローチャートである。
ステップ200〜205、225〜237は、実施例4の図48〜図50におけるステップ100〜105、123〜135と同じである。
ステップ206では、現在位置での左右の現在旋回中心点Pcl、Pcrが検出、設定される。
ステップ207では、円弧設定部24が、先の図59に示すように、自車両(Mc)の左側の旋回中心点Pclを中心として左側の旋回中心点Pclと右側の旋回中心点Pcr間の距離を半径とする円弧60’を、その始点を右側の旋回中心点Pcrに置いて設定する。
ステップ208において、接線演算部25は最終旋回中心点Pfを通り円弧60’に接する接線52’を演算し、当該接線52’と円弧60’との接点Gを算出する。
そして、ステップ209において、進入角度演算部26は、接線52’の傾きを駐車枠Sへの進入角度として演算し、現在位置における自車両の車両前後方向軸CLとの角度差βを算出する。
ステップ210において、描画制御部20Aがメモリ29から自車両アイコンMc、Mf、車両前後方向軸線アイコン51、最終旋回中心点アイコン54と右側の現在旋回中心点アイコン56、円弧アイコン60の画像データを読み出す。
そして、ステップ211において、重畳画像合成部13に対して俯瞰画像へのアイコン重畳を行なわせる。描画制御部20Aは進入角度演算部26からの情報に基づいて各アイコンの配置を制御し、さらに接線52’と円弧60’との接点Gと最終旋回中心点Pfの間を結ぶガイド接線52を重畳させる。
これにより、モニタ8には駐車支援のための画像として、図63に示すように、自車両周囲の俯瞰画像に自車両等のアイコンが重畳されて表示される。
モニタ8に各アイコンが重畳表示されると、ステップ212において、メッセージ制御部30Aが「停止してください」とのメッセージを出力させる。
そして、ステップ213において、ヨー角変化監視部21Aが、車輪速センサ7の出力をチェックして、自車両が停止していることを確認すると、その旨をメッセージ制御部30Aへ通知する。
ヨー角変化監視部21Aはこの時点において進入角度演算部26で算出された接線
52’と車両前後方向軸CLとの角度差βを保持する。
ステップ214において、メッセージ制御部30Aは、ステップ212で出力させたメッセージを消し、「左いっぱいにハンドルを切ってください」など、左最大転舵を行なうべき旨のメッセージを出力させる。
ステップ215では、メッセージ制御部30Aは最大転舵判断部23からの出力により自車両が左方向の最大転舵状態になっているかどうかをチェックする。
上記チェックを繰り返して、最大転舵状態になると、ステップ216へ進んで、メッセージ制御部30Aは、先のメッセージをモニタ8から消して、「後退してください」のメッセージを出力させる。
これらのメッセージを受けて運転者は左最大転舵で自車両を後退させる。運転者は、モニタ画面において、自車両Mcの車両前後方向軸線アイコン51の向きが接点Gと最終旋回中心点アイコン54間のガイド接線52に近づいていくのを確認することができる。
つぎに、ステップ217において、ヨー角変化監視部21Aは、ヨーレートセンサ6から出力される角速度を時間積分して自車両の車両前後方向軸CLの角度変化量を求め、その角度変化量が自車両が停止しているときに保持した接線52’との角度差βに至った(現在位置での角度差=0)かどうかをチェックする。
後退による角度変化量が上記角度差に至るまで上記チェックを繰り返し、角度変化量が角度差に一致したときに、ステップ218へ進む。
このときのモニタ画面の表示は図64に示すようになる。円弧60の始点(Pcr)が円弧60とガイド接線52の接点Gに到達し、現在旋回中心点アイコン56が接点Gの位置に重なる。
ステップ218では、メッセージ制御部30Aは、ステップ216で出力させたメッセージを消し、「停止してください」のメッセージを出力させる。
次のステップ219において、ヨー角変化監視部21が、車輪速センサ7の出力をチェックして、自車両が停止していることを確認すると、その旨をメッセージ制御部30Aへ通知する。
これに応じて、ステップ220では、メッセージ制御部30が、ステップ218で出力させたメッセージを消し、「ハンドルを中立位置にして後退してください」など、中立転舵後後退すべき旨のメッセージを出力させる。
この際、モニタ8の画面に重畳表示されたガイド接線52は後退方向の指標となる。
このとき、さらにガイド接線52と旋回中心点アイコン54、56の表示色を変えたり、あるいは点滅させて、運転者の注意を喚起するようにしてもよい。
ステップ221では、メッセージ制御部30Aは、インヒビタスイッチ5の出力からRレンジ(後退)のシフトポジションが選択されたかどうかをチェックする。
上記チェックを繰り返して、Rレンジの選択状態になると、ステップ222へ進む。
Rレンジが選択されて自車両が後退すると、ガイド接線52は自車両の車両前後方向軸CLと平行になっているから、モニタ画面上、現在旋回中心点アイコン56はガイド接線52にそって最終旋回中心点アイコン54へ近づいていく。
この間、アイコン状態判断部22Aは現在旋回中心点アイコン56と最終旋回中心点アイコン54の位置関係を監視している。
ステップ222では、メッセージ制御部30Aが、アイコン状態判断部22Aの出力により、重畳画像における現在旋回中心点アイコン56(接点G)が最終旋回中心点アイコン54に重なったかをチェックする。
上記チェックを繰り返し、図65のモニタ画面に示すように、現在旋回中心点アイコン56が最終旋回中心点アイコン54に重なった時点で、ステップ223へ進む。
ステップ223では、メッセージ制御部30Aが、「停止してください」のメッセージを出力させる。
また、ステップ224では、描画制御部20Aが、現在旋回中心点アイコン56と最終旋回中心点アイコン54が重なった旨のアイコン状態判断部22Aの出力を受けて、車両前後方向軸線アイコン51、最終旋回中心点アイコン54、および円弧アイコン60の表示を消させる。なお、この時点でガイド接線52も消えている。
続いて描画制御部20Aは、ステップ225において、メモリ29から前部最外周の案内指標44と後部最外周の案内指標46の画像データを読み出し、ステップ226において、重畳画像合成部13に対して俯瞰画像へのアイコン重畳を行なわせる。
このあとのステップ227〜237は、実施例4おける図55〜図57を参照した処理ステップ125〜135と同じである。
すなわち、枠線Hと前部最外周の案内指標44または後部最外周の案内指標46のいずれかとの干渉の有無をチェックして、干渉する場合には駐車案内不可のメッセージを出力させ、干渉しない場合は、右最大転舵後、後退を行なわせることにより、自車両は旋回中心点アイコン54(Pf)を中心として旋回して、図57に示されるように、駐車枠Sの最終駐車位置へ到達できる。
したがって、以降のステップの詳細説明は省略する。
実施例2においては、図60〜図62のフローチャートにおけるステップ201が俯瞰画像作成手段を構成し、ステップ202が駐車枠検出手段を、ステップ203が最終駐車位置設定手段を、ステップ204が第1旋回点設定手段を、ステップ205が現在位置検出手段を、そしてステップ206〜208が第2旋回点設定手段を構成している。
最終旋回中心点Pfが第1の旋回点に該当し、接点Gが第2の旋回点に該当する。
車両前後方向軸線アイコン51が車両前後方向軸を示す画像に該当し、ガイド接線52が第1の旋回点と第2の旋回点を通る直線に、円弧アイコン60が円弧を示す画像に該当する。
また、ステップ210、211、224〜226、231が重畳画像合成手段を構成し、ステップ212〜216、218〜220、223、228〜230、232〜234、236が支援情報制御手段を構成している。
また、モニタ8とスピーカ9がメッセージ提示手段に該当する。
実施例5は以上のように構成され、カメラ2で撮像した自車両周囲状況を真上から見た俯瞰画像としてモニタ8に表示するとともに、俯瞰画像から検出した駐車枠S内に自車両が最終的に位置すべき最終駐車位置を設定して、最終駐車位置における自車両の最小回転半径での右側(進入路側)の最終旋回中心点Pfを求め、現在位置における自車両の左側の旋回中心点Pclを中心として左側の旋回中心点Pclと右側の旋回中心点Pcr間の距離を半径とする円弧60’を設定して、最終旋回中心点Pfを通り円弧60’に接点Gで接するガイド接線52を俯瞰画像に重畳するものとしたので、運転者はモニタ画面のガイド接線52を参照して、駐車枠Sへの進入角度を容易に把握することができる。
また、自車両Mcの車両前後方向軸線アイコン51も俯瞰画像に重畳させることにより、車両前後方向軸線アイコン51を参照して自車両をガイド接線52と平行にもっていく操作が容易となり、駐車枠Sへ向かう間の方向保持の確認も容易となる。
さらには、左側の旋回中心点Pclを中心とする円弧アイコン60も俯瞰画像に重畳させるので、運転者は自車両をガイド接線52と平行にもっていくための転舵方向を直感的に認識することができる。
とくに、自車両の車両前後方向軸CL(車両前後方向軸線アイコン51)と接線52’(ガイド接線52)が平行になった位置において、中立転舵のうえ後退させるメッセージを出力するので、転舵のタイミングがいっそう正確となる。
また、その後、最終旋回中心点アイコン54と現在旋回中心点アイコン56が重なった位置において、現在旋回中心点Pcrを旋回中心とする方向に最大転舵のうえ後退させる旨の支援メッセージを出力するので、最終段階移動として、最小回転半径で最終駐車位置へ到達することができる。
さらに、最終旋回中心点アイコン54と現在旋回中心点アイコン56が重なったときに、最終駐車位置への最終段階移動開始の後退をさせる前、すなわち最大転舵のうえ後退させるメッセージを出力する前に、それぞれ扇形状の要を現在旋回中心点Pcrにおいた前部最外周の案内指標44と後部最外周の案内指標46を俯瞰画像に重畳して表示するので、駐車枠S内の最終駐車位置まで他との干渉なしに進入可能であるかをモニタ画面上で容易に確認することができる。
なお、俯瞰画像に重畳されるガイド接線52は最終旋回中心点アイコン54と接点Gの間を結ぶものとしたが、これに限定されず、適宜両方向に延ばしてもよい。
車両前後方向軸線アイコン51の長さも同様に任意に設定してよい。
また、制御フローのステップ217では、自車両の車両前後方向軸CLの向きが接線52’と平行になったことを確認するのに、ヨー角変化監視部21Aによりヨーレートセンサ6の出力を用いた角度変化量を監視して行なうものとしたが、このほか、進入角度演算部26を介して得られる情報を用いて、現在旋回中心点Pcrが接点Gに重なったこと、あるいは現在旋回中心点Pcrが接線52’と接触したことから判断することもできる。
あるいはまた、現在旋回中心点アイコン56が接点Gに重なったこと、または現在旋回中心点アイコン56がガイド接線52と接触したことを、アイコン状態判断部22Aで判断するようにしてもよい。
さらに、ステップ222では、現在旋回中心点Pcrと最終旋回中心点Pfが重なったことを、現在旋回中心点アイコン56と最終旋回中心点アイコン54の重なりを判断するアイコン状態判断部22Aの出力によりチェックするものとしたが、アイコンの重なりではなく、進入角度演算部26を介して得られる現在旋回中心点Pcrと最終旋回中心点Pfの直接情報を用いてこれらの旋回中心点が一致するタイミングを判断するようにしてもよい。
また、ステップ224において、車両前後方向軸線アイコン51とともに、円弧アイコン60の表示を消させるものとしたが、円弧アイコン60はこれより前の接線52’と車両前後方向軸CLの角度差が0となったあとならいつでも消してよい。
上記実施例4,5では、最終駐車位置への最終段階移動開始に先立って、自車両の通過領域を示す案内指標44、46を俯瞰画像に重畳して、枠線Hとの干渉がないことを確認した後は、後退の教示に続いてステップ129(ステップ231)で案内指標を消すものとしているが、最終駐車位置に至るまで案内指標を重畳したままとして最後まで確認を行えるようにしてもよい。
実施例4,5ではまた、ステップ131、132(ステップ233、234)でメッセージ制御部30(30A)がアイコン状態判断部22(22A)の出力により、自車両が最終駐車位置に位置したことをチェックして、駐車完了のメッセージを出力させるものとしたが、駐車枠Sの最終駐車位置に到達したかどうかは実際の車両周囲状況あるいはモニタ8の画面からも運転者が確認できるので、装置自体としては上記チェックおよびメッセージ処理を省略して、例えばステップ133(ステップ235)のチェックで、Pレンジ(パーキング)のシフトポジションが選択されたことにより、最終駐車位置に到達したものとして支援の制御処理を終了するものとしてもよい。
なお、案内指標44、46と枠線Hが干渉した場合には、駐車案内不可としてモニタ8の表示を消して制御処理を終了するものとしたが、運転者が支援に頼らずに同じ駐車枠への駐車操作を行う際の参考となるように、駐車支援起動スイッチ3がオフされるまでは現在位置における自車両アイコンMcを重畳した俯瞰画像の表示を継続するようにしてもよい。
実施例4,5では、自車両の進行方向に対して左側の駐車枠に駐車しようとする場合について説明したが、進行方向に対して右側の駐車枠に駐車しようとする場合は、上記説明における左右を反転させればよい。
本発明の実施例1に係る駐車支援装置の構成を示す図である。
実施例1に係る駐車支援起動スイッチの構成を示す図である。
駐車を支援する案内指標を示す図である
実施例1における制御処理の流れを示すフローチャートである。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における縦列駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列後退駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
実施例1における並列前進駐車時の案内指標の様子を示す図である。
本発明の実施例2に係る駐車支援装置の構成を示す図である。
実施例2における制御処理の流れを示すフローチャートである。
実施例2における並列後退駐車時の案内指標の様子を示す図である。
実施例2における並列後退駐車時の案内指標の様子を示す図である。
実施例2における並列後退駐車時の案内指標の様子を示す図である。
実施例2における並列前進駐車時の案内指標の様子を示す図である。
実施例2における並列前進駐車時の案内指標の様子を示す図である。
実施例2における並列前進駐車時の案内指標の様子を示す図である。
実施例2における並列前進駐車時の案内指標の様子を示す図である。
本発明の実施例3に係る駐車支援装置の構成を示す図である。
実施例3における制御処理の流れを示すフローチャートである。
実施例3における並列前進駐車時の案内指標の様子を示す図である。
実施例3における並列前進駐車時の案内指標の様子を示す図である。
実施例3における並列前進駐車時の案内指標の様子を示す図である。
実施例3における並列前進駐車時の案内指標の様子を示す図であ
本発明の実施例4に係る駐車支援装置の構成を示す図である。
俯瞰画像例を示す図である。
旋回中心点の設定と直線の算出要領を示す説明図である。
実施例4におけるアイコン例を示す図である。
実施例4における制御処理の流れを示すフローチャートである。
実施例4における制御処理の流れを示すフローチャートである。
実施例4における制御処理の流れを示すフローチャートである。
駐車支援起動スイッチがオンされた時のモニタ画面表示を示す図である。
直線と車両前後方向軸の角度差が0となったときのモニタ画面表示を示す図である。
直線と車両前後方向軸の角度差が0で後退中のモニタ画面表示を示す図である。
現在旋回中心点アイコンが最終旋回中心点アイコンに重なった状態を示す図である。
前部最外周の案内指標と後部最外周の案内指標を重畳した状態を示す図である。
枠線と案内指標が干渉した状態を示す図である。
自車両アイコンが駐車枠の最終駐車位置に到達した状態を示す図である。
本発明の実施例5に係る駐車支援装置の構成を示す図である。
円弧と接線の設定要領を示す説明図である。
実施例5における制御処理の流れを示すフローチャートである。
実施例5における制御処理の流れを示すフローチャートである。
実施例5における制御処理の流れを示すフローチャートである。
駐車支援起動スイッチがオンされた時のモニタ画面表示を示す図である。
接線と車両前後方向軸の角度差が0となったときのモニタ画面表示を示す図である。
現在旋回中心点アイコンが最終旋回中心点アイコンに重なった状態を示す図である。
符号の説明
1、1A、1B、1C、1D 駐車支援装置
2、2a、2b、2c、2d カメラ
3、3B 駐車支援起動スイッチ
4 舵角センサ
5 インヒビタスイッチ
6 ヨーレートセンサ
7 車輪速センサ
8 モニタ
9 スピーカ
10、10A、10B、10C、10D コントロールユニット
11、11B 視点変換部
12、12B 俯瞰画像作成部
13、13B 重畳画像合成部
14 駐車枠検出部
15 駐車位置設定部
16 最終旋回中心設定部
17 自車位置検出部
18、18A 旋回中心検出部
19 旋回角度演算部
20、20A、20B、20C、20D 描画制御部
21、21A ヨー角変化監視部
22、22A アイコン状態判断部
23 最大転舵判断部
24 円弧設定部
25 接線演算部
26 進入角度演算部
29 メモリ
30、30A メッセージ制御部
40 駐車枠接触検出部
44 前部最外周の案内指標
46 後部最外周の案内指標
50 ガイド直線
50’ 直線
51 車両前後方向軸線アイコン
52 ガイド接線
52’ 接線
54 最終旋回中心点アイコン
56 現在旋回中心点アイコン
60 円弧アイコン
60’ 円弧
81〜84 並列駐車用の案内指標
CL 車両前後方向軸
G 接点
H 枠線
Mc、Mf 自車両アイコン
Pc、Pcl、Pcr 現在旋回中心点
Pf 最終旋回中心点
S 駐車枠
Wl、Wr 後輪