JP2010007701A - 摺動式トリポード型等速ジョイント - Google Patents
摺動式トリポード型等速ジョイント Download PDFInfo
- Publication number
- JP2010007701A JP2010007701A JP2008164967A JP2008164967A JP2010007701A JP 2010007701 A JP2010007701 A JP 2010007701A JP 2008164967 A JP2008164967 A JP 2008164967A JP 2008164967 A JP2008164967 A JP 2008164967A JP 2010007701 A JP2010007701 A JP 2010007701A
- Authority
- JP
- Japan
- Prior art keywords
- tripod
- outer ring
- pair
- power transmission
- constant velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Landscapes
- Rolling Contact Bearings (AREA)
Abstract
【解決手段】外輪10の軌道溝11の側面の両側からトリポード軸部22を挟むように配置され、且つ、トリポード軸部22に対して揺動可能に設けられる一対の中間部材40a、40bと、軌道溝11の側面と一対の中間部材40a、40bの軌道溝11の側面に対向する動力伝達面42との間に、軌道溝11の側面に沿って転動可能に設けられる複数の転動体50と、転動体50が一対の中間部材40a、40bの外周を循環可能となるように転動体50を支持する保持器60とを備える。
【選択図】図3
Description
筒状からなり、内周面に外輪回転軸方向に延びる3本の軌道溝が形成された外輪と、
シャフトに連結されるボス部、および、前記ボス部の外周面からそれぞれ前記ボス部の径方向外方に延びるように立設されそれぞれの前記軌道溝に挿入される3本のトリポード軸部を備えるトリポードと、
前記軌道溝の側面の両側から前記トリポード軸部を挟むように配置され、且つ、前記トリポード軸部に対して揺動可能に設けられる一対の中間部材と、
前記軌道溝の側面と前記一対の中間部材の前記軌道溝の側面に対向する動力伝達面との間に、前記軌道溝の側面に沿って転動可能に設けられる複数の転動体と、
前記転動体が前記一対の中間部材の外周を循環可能となるように前記転動体を支持する保持器と、
を備えることを特徴とする。
前記トリポード軸部の外周面は球面凸状であり、
前記外輪回転軸と前記シャフト回転軸が一致している姿勢において、
前記転動体のトリポード軸方向の幅中心を通りトリポード軸と直交する平面におけるトリポード軸上の点と、前記外輪回転軸との距離を外輪PCRとし、
前記トリポード軸部の外周面の曲率中心と、前記シャフト回転軸との距離をトリポードPCRとし、
前記トリポードPCRは、前記外輪PCRより大きく設定されるとよい。
前記一対の中間部材には、循環する前記転動体を前記動力伝達面へ円滑に接触案内するように、前記動力伝達面に対して滑らかな中間部材導入面を形成するとよい。
前記保持器により循環する前記転動体の軌跡である循環路は、
前記動力伝達面を移動する前記転動体の循環路であって前記動力伝達面に倣う第一の循環路と、
前記中間部材導入面を移動する前記転動体の循環路であって前記中間部材導入面に倣い且つ前記第一の循環路に滑らかに接続する第二の循環路と、
前記第二の循環路のうち前記第一の循環路と反対側端部に滑らかに接続する第三の循環路と、を有するとよい。
前記保持器は、前記一対の中間部材に対して動力伝達方向に規制されていないようにするとよい。
前記トリポード軸部の外周面は、球面凸状であり、
前記一対の中間部材の内面は、前記トリポード軸部の外周面に嵌合される球面凹状であってもよい。
前記転動体は、円柱状のニードルであり、
前記外輪回転軸と前記シャフト回転軸が一致している姿勢において、
前記保持器は、前記ニードルの円柱軸方向が前記トリポード軸方向と平行となるように前記ニードルを支持し、
前記一対の中間部材は、前記ニードルに対し前記外輪径方向に摺動可能な前記動力伝達面を形成してもよい。
また、転動体は、球状またはバレル状コロであり、
外輪回転軸とシャフト回転軸が一致している姿勢において、
一対の中間部材は、転動体に対し外輪径方向に揺動可能な動力伝達面を形成されてもよい。
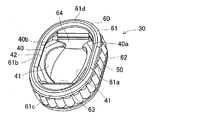
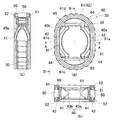
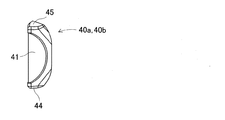
第一実施形態の等速ジョイント1について、図1〜図8を参照して説明する。図1は、第一実施形態の等速ジョイント1の一部の組付け状態における、外輪10の開口側から見た図である。図2は、等速ジョイント1の一部の径方向断面図である。図3は、ローラユニット30の斜視図である。図4(a)は、ローラユニット30の平面図であり、図4(b)は、ローラユニット30のA−A断面図(短径側の断面図)であり、図4(c)は、ローラユニット30のB−B部分断面図(長径側の部分断面を含む図)である。図5は、一対の中間部材40の一つの斜視図である。図6(a)は、中間部材40の正面図であり、図6(b)は、中間部材40のE−E部分断面図であり、図6(c)は、中間部材40のF方向矢視図であり、図6(d)は、中間部材40のG−G断面図であり、図6(e)は、中間部材40のH−H断面図である。図7は、保持器60の斜視図である。図8(a)は、保持器60の平面図であり、図8(b)は、保持器60のC−C断面図(短径側の断面図)であり、図8(c)は、保持器60のD−D断面図(長径側の部分断面を含む図)である。
上述した第一実施形態において、一対の中間部材40a、40bのトリポード接触面41は、球面凹状であるとした。この他に、一対の中間部材40a、40bのトリポード接触面41は、円筒面とすることもできる。
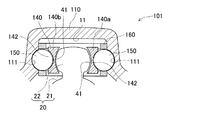
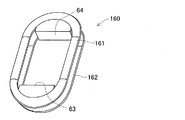
第二実施形態の等速ジョイント101について、図9〜図14を参照して説明する。図9は、第二実施形態の等速ジョイント101の一部の径方向断面図である。図10は、ローラユニット130の斜視図である。図11は、保持器160の斜視図である。図12(a)は、保持器160の平面図であり、図12(b)は、保持器160のJ方向矢視図であり、図12(c)は、保持器160のK−K断面図(長径側の部分断面を含む図)である。図13は、一対の中間部材140の一つの斜視図である。図14(a)は、中間部材140の正面図であり、図14(b)は、中間部材140のL−L部分断面図であり、図14(c)は、中間部材140のM方向矢視図であり、図14(d)は、中間部材140のN−N断面図である。
第三実施形態の等速ジョイント201について、図15を参照して説明する。図15は、第三実施形態の等速ジョイント201の一部の径方向断面図である。図15に示すように、等速ジョイント201は、外輪110と、トリポード20と、ローラユニット230とから構成される。ここで、第三実施形態の等速ジョイント201は、第二実施形態の等速ジョイント101の転動体150を、球体からバレル状コロに変更した点が相違する。以下相違点のみについて説明する。
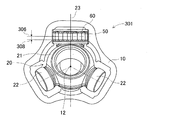
第四実施形態の等速ジョイント301について、図16を参照して説明する。第四実施形態の等速ジョイント301は、第一実施形態の等速ジョイント1の構成を基本とした場合において、外輪PCR(ピッチ円半径)302とトリポードPCR303とを異なるように設定したものである。図16は、第四実施形態の等速ジョイント301の一部の径方向断面図である。なお、第四実施形態の等速ジョイント301は、実質的に、第一実施形態の等速ジョイント1と同一構成からなるため、各構成部品には同一符号を用いる。
第五実施形態の等速ジョイント401について、図20および図21を参照して説明する。図20は、第五実施形態の等速ジョイント401の一部の径方向断面図である。図21は、オフセット量別のジョイント角と回転ガタ量を示すグラフである。図21において、(a)はオフセット量0mmであり、(b)はオフセット量0.2mmであり、(c)はオフセット量0.3mmであり、(d)はオフセット量0.6mmである。
10、110:外輪、 11、111:軌道溝、 12:係止突起
13:外輪回転軸
20:トリポード、 21:ボス部、 21a:内周スプライン
22:トリポード軸部、 23:中間シャフト回転軸
30、130:ローラユニット
40、140:中間部材、 40a、40b、140a、140b:各中間部材
41:トリポード接触面、 42、142:動力伝達面
43、143:中間部材導入面、 44、45:軸方向端面
50、150、250:転動体、 51:円柱状部、 52:小径軸部
60、160:保持器
61、62、161、162:循環路形成部材
61a、61b:直線部、 61c、61d:湾曲部、 63、64:連結部
302:外輪PCR、 303:トリポードPCR、 304:交点
305:曲率中心、 306:基準荷重点
307:第一の荷重点、 308:第二の荷重点
Claims (8)
- 筒状からなり、内周面に外輪回転軸方向に延びる3本の軌道溝が形成された外輪と、
シャフトに連結されるボス部、および、前記ボス部の外周面からそれぞれ前記ボス部の径方向外方に延びるように立設されそれぞれの前記軌道溝に挿入される3本のトリポード軸部を備えるトリポードと、
前記軌道溝の側面の両側から前記トリポード軸部を挟むように配置され、且つ、前記トリポード軸部に対して揺動可能に設けられる一対の中間部材と、
前記軌道溝の側面と前記一対の中間部材の前記軌道溝の側面に対向する動力伝達面との間に、前記軌道溝の側面に沿って転動可能に設けられる複数の転動体と、
前記転動体が前記一対の中間部材の外周を循環可能となるように前記転動体を支持する保持器と、
を備えることを特徴とする摺動式トリポード型等速ジョイント。 - 前記トリポード軸部の外周面は球面凸状であり、
前記外輪回転軸と前記シャフト回転軸が一致している姿勢において、
前記転動体のトリポード軸方向の幅中心を通りトリポード軸と直交する平面におけるトリポード軸上の点と、前記外輪回転軸との距離を外輪PCRとし、
前記トリポード軸部の外周面の曲率中心と、前記シャフト回転軸との距離をトリポードPCRとし、
前記トリポードPCRは、前記外輪PCRより大きく設定されることを特徴とする請求項1に記載の摺動式トリポード型等速ジョイント。 - 前記一対の中間部材には、循環する前記転動体を前記動力伝達面へ円滑に接触案内するように、前記動力伝達面に対して滑らかな中間部材導入面を形成することを特徴とする請求項1または2に記載の摺動式トリポード型等速ジョイント。
- 前記保持器により循環する前記転動体の軌跡である循環路は、
前記動力伝達面を移動する前記転動体の循環路であって前記動力伝達面に倣う第一の循環路と、
前記中間部材導入面を移動する前記転動体の循環路であって前記中間部材導入面に倣い且つ前記第一の循環路に滑らかに接続する第二の循環路と、
前記第二の循環路のうち前記第一の循環路と反対側端部に滑らかに接続する第三の循環路と、
を有することを特徴とする請求項3に記載の摺動式トリポード型等速ジョイント。 - 前記保持器は、前記一対の中間部材に対して動力伝達方向に規制されていないことを特徴とする請求項1〜4のいずれか一項に記載の摺動式トリポード型等速ジョイント。
- 前記トリポード軸部の外周面は、球面凸状であり、
前記一対の中間部材の内面は、前記トリポード軸部の外周面に嵌合される球面凹状であることを特徴とする請求項1〜5のいずれか一項に記載の摺動式トリポード型等速ジョイント。 - 前記転動体は、円柱状のニードルであり、
前記外輪回転軸と前記シャフト回転軸が一致している姿勢において、
前記保持器は、前記ニードルの円柱軸方向が前記トリポード軸方向と平行となるように前記ニードルを支持し、
前記一対の中間部材は、前記ニードルに対し前記外輪径方向に摺動可能な前記動力伝達面を形成することを特徴とする請求項1〜6のいずれか一項に記載の摺動式トリポード型等速ジョイント。 - 前記転動体は、球状またはバレル状コロであり、
前記外輪回転軸と前記シャフト回転軸が一致している姿勢において、
前記一対の中間部材は、前記転動体に対し前記外輪径方向に揺動可能な前記動力伝達面を形成することを特徴とする請求項1〜6のいずれか一項に記載の摺動式トリポード型等速ジョイント。
Priority Applications (15)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164967A JP5240506B2 (ja) | 2008-06-24 | 2008-06-24 | 摺動式トリポード型等速ジョイント |
| PCT/JP2009/061411 WO2009157448A1 (ja) | 2008-06-24 | 2009-06-23 | 摺動式トリポード型等速ジョイント |
| EP13002280.9A EP2623809B1 (en) | 2008-06-24 | 2009-06-23 | Sliding type tripod constant velocity joint |
| EP13002278.3A EP2623807B1 (en) | 2008-06-24 | 2009-06-23 | Sliding type tripod constant velocity joint |
| EP09770158.5A EP2299135B1 (en) | 2008-06-24 | 2009-06-23 | Sliding type tripod constant velocity joint |
| US12/737,243 US8540581B2 (en) | 2008-06-24 | 2009-06-23 | Sliding type tripod constant velocity joint |
| CN201310263095.1A CN103352926B (zh) | 2008-06-24 | 2009-06-23 | 滑动式三角架等速度接头 |
| CN201310263957.0A CN103352927B (zh) | 2008-06-24 | 2009-06-23 | 滑动式三角架等速度接头 |
| CN201310263091.3A CN103352925B (zh) | 2008-06-24 | 2009-06-23 | 滑动式三角架等速度接头 |
| CN200980132142.0A CN102124243B (zh) | 2008-06-24 | 2009-06-23 | 滑动式三角架等速度接头 |
| EP13002279.1A EP2623808B1 (en) | 2008-06-24 | 2009-06-23 | Sliding type tripod constant velocity joint |
| US13/495,997 US8454448B2 (en) | 2008-06-24 | 2012-06-13 | Sliding type tripod constant velocity joint |
| US13/523,202 US8376867B2 (en) | 2008-06-24 | 2012-06-14 | Sliding type tripod constant velocity joint |
| US13/523,181 US8550924B2 (en) | 2008-06-24 | 2012-06-14 | Sliding type tripod constant velocity joint |
| US13/937,034 US8727895B2 (en) | 2008-06-24 | 2013-07-08 | Sliding type tripod constant velocity joint |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008164967A JP5240506B2 (ja) | 2008-06-24 | 2008-06-24 | 摺動式トリポード型等速ジョイント |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010007701A true JP2010007701A (ja) | 2010-01-14 |
| JP5240506B2 JP5240506B2 (ja) | 2013-07-17 |
Family
ID=41588450
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008164967A Expired - Fee Related JP5240506B2 (ja) | 2008-06-24 | 2008-06-24 | 摺動式トリポード型等速ジョイント |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5240506B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011163443A (ja) * | 2010-02-09 | 2011-08-25 | Jtekt Corp | 摺動式トリポード型等速ジョイント |
| JP2016136061A (ja) * | 2015-01-16 | 2016-07-28 | 株式会社ジェイテクト | スライド式等速ジョイント |
| DE102016110983A1 (de) | 2015-06-18 | 2016-12-22 | Jtekt Corporation | Homokinetisches Verschiebegelenk |
| DE102016110984A1 (de) | 2015-06-18 | 2016-12-22 | Jtekt Corporation | Homokinetisches Verschiebegelenk |
| CN112211914A (zh) * | 2020-09-28 | 2021-01-12 | 万向钱潮股份有限公司 | 一种三球销结构 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5940016A (ja) * | 1982-08-31 | 1984-03-05 | Ntn Toyo Bearing Co Ltd | 等速自在継手 |
| JPS62255616A (ja) * | 1986-03-31 | 1987-11-07 | ゼネラル モ−タ−ズ コ−ポレ−シヨン | 伸縮式三脚型自在継手 |
| JPS63163031A (ja) * | 1986-12-16 | 1988-07-06 | グレンツアー スピーセル | トランスミッション連結装置 |
| JPH03172622A (ja) * | 1989-11-03 | 1991-07-26 | Loehr & Bromkamp Gmbh | トリポード型自在継ぎ手 |
| JPH07501126A (ja) * | 1991-10-15 | 1995-02-02 | ジーケーエヌ オートモウティブ インコーポレイテッド | ローラベアリング及び保持器組立体 |
| JP2763624B2 (ja) * | 1989-10-31 | 1998-06-11 | エヌティエヌ株式会社 | 等速ジョイント |
| US6174239B1 (en) * | 1997-02-11 | 2001-01-16 | Gkn Automotive Ag | Tripod sliding constant velocity joint |
| JP2002147482A (ja) * | 2000-10-16 | 2002-05-22 | Delphi Technologies Inc | トリポード型等速ジョイント |
-
2008
- 2008-06-24 JP JP2008164967A patent/JP5240506B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5940016A (ja) * | 1982-08-31 | 1984-03-05 | Ntn Toyo Bearing Co Ltd | 等速自在継手 |
| JPS62255616A (ja) * | 1986-03-31 | 1987-11-07 | ゼネラル モ−タ−ズ コ−ポレ−シヨン | 伸縮式三脚型自在継手 |
| JPS63163031A (ja) * | 1986-12-16 | 1988-07-06 | グレンツアー スピーセル | トランスミッション連結装置 |
| JP2763624B2 (ja) * | 1989-10-31 | 1998-06-11 | エヌティエヌ株式会社 | 等速ジョイント |
| JPH03172622A (ja) * | 1989-11-03 | 1991-07-26 | Loehr & Bromkamp Gmbh | トリポード型自在継ぎ手 |
| JPH07501126A (ja) * | 1991-10-15 | 1995-02-02 | ジーケーエヌ オートモウティブ インコーポレイテッド | ローラベアリング及び保持器組立体 |
| US6174239B1 (en) * | 1997-02-11 | 2001-01-16 | Gkn Automotive Ag | Tripod sliding constant velocity joint |
| JP2002147482A (ja) * | 2000-10-16 | 2002-05-22 | Delphi Technologies Inc | トリポード型等速ジョイント |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011163443A (ja) * | 2010-02-09 | 2011-08-25 | Jtekt Corp | 摺動式トリポード型等速ジョイント |
| JP2016136061A (ja) * | 2015-01-16 | 2016-07-28 | 株式会社ジェイテクト | スライド式等速ジョイント |
| DE102016110983A1 (de) | 2015-06-18 | 2016-12-22 | Jtekt Corporation | Homokinetisches Verschiebegelenk |
| DE102016110984A1 (de) | 2015-06-18 | 2016-12-22 | Jtekt Corporation | Homokinetisches Verschiebegelenk |
| CN112211914A (zh) * | 2020-09-28 | 2021-01-12 | 万向钱潮股份有限公司 | 一种三球销结构 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5240506B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5741633B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5240506B2 (ja) | 摺動式トリポード型等速ジョイント | |
| WO2009157448A1 (ja) | 摺動式トリポード型等速ジョイント | |
| JP2006112495A (ja) | 等速ジョイント | |
| JP5176717B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP4952667B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5604889B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP2011163410A (ja) | 摺動式トリポード型等速ジョイント | |
| JP5240507B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5760560B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5316329B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5287519B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5585032B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5083067B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5564865B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP2012197803A (ja) | 摺動式トリポード型等速ジョイント | |
| JP5293512B2 (ja) | 摺動式トリポード型等速ジョイント | |
| JP5726694B2 (ja) | 等速ジョイント | |
| JP2010071393A (ja) | 等速自在継手 | |
| JP2009014179A (ja) | トリポード型等速自在継手 | |
| JP2010144898A (ja) | 摺動式トリポード型等速ジョイント及びローラユニット | |
| JP2010014198A (ja) | 摺動式トリポード型等速ジョイント | |
| JP2017008989A (ja) | スライド式等速ジョイント | |
| JP2006090512A (ja) | 等速自在継手 | |
| JP2006090515A (ja) | 等速自在継手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110221 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130208 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130307 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130320 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |