JP2010005676A - 摩擦攪拌接合装置 - Google Patents
摩擦攪拌接合装置 Download PDFInfo
- Publication number
- JP2010005676A JP2010005676A JP2008169808A JP2008169808A JP2010005676A JP 2010005676 A JP2010005676 A JP 2010005676A JP 2008169808 A JP2008169808 A JP 2008169808A JP 2008169808 A JP2008169808 A JP 2008169808A JP 2010005676 A JP2010005676 A JP 2010005676A
- Authority
- JP
- Japan
- Prior art keywords
- tool
- friction stir
- stir welding
- welding apparatus
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000003756 stirring Methods 0.000 title claims abstract description 115
- 238000003466 welding Methods 0.000 title claims abstract description 115
- 230000005540 biological transmission Effects 0.000 claims abstract description 7
- 238000005452 bending Methods 0.000 claims abstract description 3
- 238000003825 pressing Methods 0.000 claims description 15
- 238000005304 joining Methods 0.000 abstract description 20
- 230000007246 mechanism Effects 0.000 abstract description 3
- 238000006243 chemical reaction Methods 0.000 description 16
- 239000002184 metal Substances 0.000 description 10
- 229910052751 metal Inorganic materials 0.000 description 10
- 238000000034 method Methods 0.000 description 10
- 239000000463 material Substances 0.000 description 6
- 239000004033 plastic Substances 0.000 description 6
- 229920003023 plastic Polymers 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- 239000000725 suspension Substances 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 229920006351 engineering plastic Polymers 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 229920003002 synthetic resin Polymers 0.000 description 2
- 239000000057 synthetic resin Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
Images





Landscapes
- Pressure Welding/Diffusion-Bonding (AREA)
Abstract
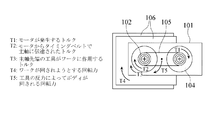
【解決手段】摩擦攪拌接合装置1は、先端部をL字状に屈曲させて工具8を回動可能に支持する工具保持部22が形成された横長の胴体2を備え、この胴体2の後端部の駆動力部23に工具8の駆動力を発生する主軸回転モータ4が配設され、胴体2の後端部と先端部との間に主軸回転モータ4で発生した駆動力を工具8に伝達するためのシャフト5及び笠歯車6,7aからなる伝達機構が配設されている。反力の発生する工具8に対してアーム部21の長さ以上の距離を離して重量の重い主軸回転モータ4などの駆動力源を配置することにより、摩擦攪拌接合装置1の慣性モーメント(工具8からの距離L2×駆動力部23の質量m)を大きくし、この慣性モーメントにより摩擦攪拌接合時の工具8の回転力の反力を緩和する。
【選択図】図1
Description
1に示す摩擦攪拌接合装置1は、側面視で横長、どちらかといえば棒形状である点に特徴を有する。摩擦攪拌接合装置1の形状を、このように横長の棒形状にしているのは、作業者が把持し易くするというだけでなく、主として慣性モーメント(工具からの距離×重量物の質量)を大きくし、その慣性モーメントにより摩擦攪拌接合開始時の非常に大きな摩擦力に起因して装置本体に生じる衝撃力を緩和し、作業者による摩擦攪拌接合装置の操作性や作業性を好適にするためである。

2 胴体
21 アーム部
22 主軸保持部(工具保持部)
22a 第2押さえ(第2の押さえ手段)
22b バネ
23 駆動力部
24 支持部
24a アーム支持ピン
25 吊り金具
3 揺動アーム(アーム)
31 工具受け(受け手段)
32 第1押さえ(第1の押さえ手段)
4 主軸回転モータ(電動モータ)
5 シャフト(伝達手段の要素)
6 笠歯車(伝達手段の要素、第1の笠歯車)
7 主軸
7a 笠歯車(伝達手段の要素、第2の笠歯車)
7b 穴
8 工具
8a 突起
9 加圧装置(加圧手段)
91 加圧モータ
92 加圧ボールスクリュー
92a スクリュー
92b ナット
93,94 笠歯車
10 制御装置(制御手段)
Claims (8)
- 工具を回転させながら被接合物の接合点に圧接させることで摩擦力を発生させ、その摩擦熱により前記接合点周辺を塑性流動させて前記被接合物の接合を行う摩擦攪拌接合装置において、
先端部をL字状に屈曲させて前記工具を回動可能に支持する工具保持部が形成された横長の胴体を備え、
前記胴体の後端部に前記工具の駆動力を発生させる駆動力発生手段が配設され、前記胴体の後端部と先端部との間に前記駆動力発生手段で発生した駆動力を前記工具保持部に支持された前記工具に伝達する伝達手段が配設されていることを特徴とする摩擦攪拌接合装置。 - 前記駆動力発生手段は、電動モータであり、
前記伝達手段は、一方端が前記電動モータのロータに固着され、他方端が前記胴体の長手方向の軸に沿って前記工具保持部に延びるシャフトと、このシャフトの他方端に固着された第1の笠歯車と、前記工具の回転軸に設けられ、前記第1の笠歯車に歯合した第2の笠歯車とで構成されている、請求項1に記載の摩擦攪拌接合装置。 - 前記工具保持部には、前記工具を装着脱することが可能な主軸が回転可能に設けられ、前記第2の笠歯車は前記主軸に形成されている、請求項2に記載の摩擦攪拌接合装置。
- 前記胴体の下側に当該胴体の横長方向と略平行に配置され、中間位置が前記胴体に揺動可能に支持されたアームと、
前記アームの一方端部の、前記工具と対向する位置に設けられ、前記工具との間で前記被接合物を挟持する受け手段と、
前記アームの他方端部を前記胴体から離間する方向に加圧する力を発生する加圧手段と、
をさらに備えている、請求項1乃至3のいずれかに記載の摩擦攪拌接合装置。 - 前記加圧手段は、前記アームの他方端部に設けられたボールスクリューと、このボールスクリューの回転トルクを発生する加圧モータとを含む、請求項4に記載の摩擦攪拌接合装置。
- 前記加圧手段は、前記胴体の後端部における前記駆動力発生手段の配設位置の下方位置に配設されている、請求項4又は5に記載の摩擦攪拌接合装置。
- 前記胴体の後端部には、更に前記駆動力発生手段および前記加圧手段の駆動を制御する制御手段が配置されている、請求項4乃至6のいずれかに記載の摩擦攪拌接合装置。
- 前記アームの一方端部の前記工具保持部と対向する面に設けられる第1の押え手段と、
前記工具保持部の先端に上下に移動可能に取り付けられた第2の押え手段と、
前記工具保持部に設けられ、前記第2の押え手段を前記第1の押え手段の方向に付勢する付勢手段と、
をさらに備えている、請求項4乃至7のいずれかに記載の摩擦攪拌接合装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008169808A JP5155036B2 (ja) | 2008-06-30 | 2008-06-30 | 摩擦攪拌接合装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008169808A JP5155036B2 (ja) | 2008-06-30 | 2008-06-30 | 摩擦攪拌接合装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010005676A true JP2010005676A (ja) | 2010-01-14 |
| JP2010005676A5 JP2010005676A5 (ja) | 2011-06-16 |
| JP5155036B2 JP5155036B2 (ja) | 2013-02-27 |
Family
ID=41586740
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008169808A Active JP5155036B2 (ja) | 2008-06-30 | 2008-06-30 | 摩擦攪拌接合装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5155036B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103521914A (zh) * | 2013-10-16 | 2014-01-22 | 哈尔滨正晨焊接切割设备制造有限公司 | 单主轴箱一次装卡的双头相位摩擦焊机 |
| JP2019098464A (ja) * | 2017-12-01 | 2019-06-24 | 株式会社マキタ | 電動工具 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002153978A (ja) * | 2000-11-22 | 2002-05-28 | Kawasaki Heavy Ind Ltd | スポット接合方法およびスポット接合装置 |
| JP2004276029A (ja) * | 2003-03-12 | 2004-10-07 | Obara Corp | 摩擦撹拌接合装置 |
| JP2005271026A (ja) * | 2004-03-24 | 2005-10-06 | Honda Motor Co Ltd | 摩擦撹拌接合方法及びその装置 |
| JP2006015350A (ja) * | 2004-06-30 | 2006-01-19 | Honda Motor Co Ltd | 摩擦撹拌接合装置 |
-
2008
- 2008-06-30 JP JP2008169808A patent/JP5155036B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002153978A (ja) * | 2000-11-22 | 2002-05-28 | Kawasaki Heavy Ind Ltd | スポット接合方法およびスポット接合装置 |
| JP2004276029A (ja) * | 2003-03-12 | 2004-10-07 | Obara Corp | 摩擦撹拌接合装置 |
| JP2005271026A (ja) * | 2004-03-24 | 2005-10-06 | Honda Motor Co Ltd | 摩擦撹拌接合方法及びその装置 |
| JP2006015350A (ja) * | 2004-06-30 | 2006-01-19 | Honda Motor Co Ltd | 摩擦撹拌接合装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103521914A (zh) * | 2013-10-16 | 2014-01-22 | 哈尔滨正晨焊接切割设备制造有限公司 | 单主轴箱一次装卡的双头相位摩擦焊机 |
| JP2019098464A (ja) * | 2017-12-01 | 2019-06-24 | 株式会社マキタ | 電動工具 |
| JP7078384B2 (ja) | 2017-12-01 | 2022-05-31 | 株式会社マキタ | 電動工具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5155036B2 (ja) | 2013-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4218888B2 (ja) | C型摩擦撹拌スポット接合ガン | |
| JP3538406B2 (ja) | 摩擦攪拌接合装置 | |
| JP5155036B2 (ja) | 摩擦攪拌接合装置 | |
| JP5081609B2 (ja) | 摩擦撹拌スポット接合装置 | |
| WO2015146185A1 (ja) | 摩擦攪拌接合装置及び摩擦攪拌接合方法 | |
| JP4956029B2 (ja) | 摩擦攪拌接合装置および摩擦攪拌接合方法 | |
| JP3956832B2 (ja) | 摩擦撹拌接合装置 | |
| JP7278300B2 (ja) | 摩擦攪拌接合装置、その運転方法、及び継手構造 | |
| JP4454674B2 (ja) | ねじ締付装置 | |
| JP3210630U (ja) | 溶接部品供給補助装置 | |
| JP5312126B2 (ja) | 摩擦攪拌接合用アタッチメント | |
| KR20200117002A (ko) | 마찰 교반 점 접합 장치 및 그 운전 방법 | |
| JP4628774B2 (ja) | 摩擦撹拌接合装置 | |
| CN108162408A (zh) | 单面结合机器 | |
| JP2002219577A (ja) | 抵抗溶接装置および抵抗溶接方法 | |
| JP2013031900A (ja) | ねじ締め装置およびねじ締め方法 | |
| JP4218895B2 (ja) | 摩擦撹拌スポット接合装置 | |
| JP2006116566A (ja) | 摩擦攪拌接合冶具および摩擦攪拌接合方法 | |
| JP2869701B2 (ja) | スポット溶接ガンの揺動装置 | |
| JP4360537B2 (ja) | X型摩擦撹拌スポット接合ガン | |
| CN216541310U (zh) | 一种自动焊接设备 | |
| JP3963336B2 (ja) | 電動x型ガン用駆動装置 | |
| JP4313020B2 (ja) | 摩擦撹拌接合装置および摩擦撹拌接合方法 | |
| JP2001038670A (ja) | 産業用ロボット | |
| JP2018058131A (ja) | 作業ツール支持ユニット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110422 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110422 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120920 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121017 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121206 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5155036 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |