JP2009096366A - 車体ロール抑制システム - Google Patents
車体ロール抑制システム Download PDFInfo
- Publication number
- JP2009096366A JP2009096366A JP2007270568A JP2007270568A JP2009096366A JP 2009096366 A JP2009096366 A JP 2009096366A JP 2007270568 A JP2007270568 A JP 2007270568A JP 2007270568 A JP2007270568 A JP 2007270568A JP 2009096366 A JP2009096366 A JP 2009096366A
- Authority
- JP
- Japan
- Prior art keywords
- roll
- wheel side
- force
- vehicle body
- front wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001629 suppression Effects 0.000 title claims abstract description 247
- 230000008859 change Effects 0.000 claims abstract description 16
- 230000000452 restraining effect Effects 0.000 claims description 402
- 230000009467 reduction Effects 0.000 claims description 178
- 238000006073 displacement reaction Methods 0.000 claims description 128
- 238000013016 damping Methods 0.000 claims description 54
- 239000000725 suspension Substances 0.000 claims description 49
- 230000033001 locomotion Effects 0.000 claims description 48
- 230000001965 increasing effect Effects 0.000 claims description 15
- 230000001419 dependent effect Effects 0.000 claims description 12
- 238000005096 rolling process Methods 0.000 claims description 8
- 230000003247 decreasing effect Effects 0.000 claims description 7
- 239000003381 stabilizer Substances 0.000 abstract description 130
- 230000001133 acceleration Effects 0.000 description 35
- 238000000034 method Methods 0.000 description 34
- 230000006870 function Effects 0.000 description 25
- 239000003638 chemical reducing agent Substances 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000012545 processing Methods 0.000 description 9
- 238000004364 calculation method Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 7
- 238000012937 correction Methods 0.000 description 6
- 239000006096 absorbing agent Substances 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000035939 shock Effects 0.000 description 5
- 238000013500 data storage Methods 0.000 description 4
- 230000005764 inhibitory process Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 230000007935 neutral effect Effects 0.000 description 4
- 230000004043 responsiveness Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000003111 delayed effect Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000013475 authorization Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 239000000837 restrainer Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000763 evoking effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 239000004615 ingredient Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0165—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input to an external condition, e.g. rough road surface, side wind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G21/00—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces
- B60G21/02—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected
- B60G21/04—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected mechanically
- B60G21/05—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected mechanically between wheels on the same axle but on different sides of the vehicle, i.e. the left and right wheel suspensions being interconnected
- B60G21/055—Stabiliser bars
- B60G21/0551—Mounting means therefor
- B60G21/0553—Mounting means therefor adjustable
- B60G21/0555—Mounting means therefor adjustable including an actuator inducing vehicle roll
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/10—Type of spring
- B60G2202/13—Torsion spring
- B60G2202/135—Stabiliser bar and/or tube
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/052—Angular rate
- B60G2400/0522—Pitch rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/052—Angular rate
- B60G2400/0523—Yaw rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/10—Acceleration; Deceleration
- B60G2400/104—Acceleration; Deceleration lateral or transversal with regard to vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/20—Speed
- B60G2400/208—Speed of wheel rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/25—Stroke; Height; Displacement
- B60G2400/252—Stroke; Height; Displacement vertical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/40—Steering conditions
- B60G2400/41—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/01—Attitude or posture control
- B60G2800/012—Rolling condition
- B60G2800/0122—Roll rigidity ratio; Warping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/24—Steering, cornering
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
【解決手段】ばね上部とばね上部との間に左右において互いに逆向きの力となるロール抑制力を発生させるとともにアクチュエータの作動によってそのロール抑制力を変更可能に構成されたアクティブスタビライザ装置14を、車両の前輪側および後輪側の各々に対して設けたシステムにおいて、それらスタビライザ装置の発生させるロール抑制力を当該車両が走行する路面の起伏に起因して生じる車体のロールを抑制するための力として作用させるための制御、つまり、路面起伏起因ロール抑制制御202を実行可能に構成される。例えば、従来のスタビライザ装置で行っていた車両の旋回に起因するロールを抑制する制御200に加え、上記路面起伏起因ロール抑制制御を実行可能とすれば、車両の乗り心地が向上する。
【選択図】 図11
Description
それぞれが、左右の車輪の一方に対応するばね上部とばね下部とを接近させつつ左右の車輪の他方に対応するばね上部とばね下部とを離間させる力となるロール抑制力を発生させるとともに、アクチュエータを有して、そのアクチュエータの作動によってそのロール抑制力を変更可能に構成された前輪側および後輪側ロール抑制装置と、
それら前輪側および後輪側のロール抑制装置の各々が発生させるべきロール抑制力である目標装置個別ロール抑制力を決定し、その決定された目標装置個別ロール抑制力に基づいて前記前輪側および後輪側のロール抑制装置の各々が有する前記アクチュエータの作動を制御することで、その各々を制御する制御装置と
を備え、
前記制御装置が、
当該車両が走行する路面の起伏に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標路面起伏起因ロール抑制力を決定する路面起伏起因ロール抑制力決定部を有する車体ロール抑制システム。
路面起伏起因ロール抑制力決定部によって決定された前記目標路面起因ロール抑制力を、設定配分比に基づいて、前記前輪側および後輪側のロール抑制装置の各々の目標装置個別ロール抑制力に配分するロール抑制力配分部を有する(1)項に記載の車体ロール抑制システム。
当該車両の旋回に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標車両旋回起因ロール抑制力を決定する車両旋回起因ロール抑制力決定部を有する(1)項ないし(3)項のいずれか1つに記載の車体ロール抑制システム。
前記路面起伏起因ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力を、設定配分比に基づいて、前記前輪側および後輪側のロール抑制装置の各々の目標装置個別ロール抑制力に配分するロール抑制力配分部を有し、
そのロール抑制力配分部が、
前記路面起伏起因ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力と、前記車両旋回起因ロール抑制力決定部によって決定された前記目標車両旋回起因ロール抑制力とを合わせた力を、前記設定配分比に基づいて、前記前輪側および後輪側のロール抑制装装置の各々の目標装置個別ロール抑制力に配分するように構成された(4)項に記載の車体ロール抑制システム。
当該車両の旋回に起因して車体に作用するロールモーメントを指標する車両旋回起因ロールモーメント指標の値に基づいて、前記目標車両旋回依拠ロール抑制力を決定するように構成された(4)項または(5)項に記載の車体ロール抑制システム。
前記車両旋回起因ロールモーメント指標の値として、車体に生じる横加速度,当該車両のヨーレート,当該車両の走行速度,車両の操舵量から選ばれる1以上のものの値に基づいて、前記目標車両旋回依拠ロール抑制力を決定するように構成された(6)項に記載の車体ロール抑制システム。
前記ロール挙動モデルとして、車体のロールを抑制するためのスカイフックスプリングとスカイフックダンパとの少なくとも一方が配備されたスカイフックモデルを採用し、そのスカイフックモデルに従って、前記スカイフックスプリングと前記スカイフックダンパとの少なくとも一方が車体のロールを抑制する力の推定を行い、その推定された力に基づいて、前記目標路面起伏起因ロール抑制力を決定するように構成されたスカイフック型ロール抑制力決定部と、
前記ロール挙動モデルとして、前記サスペンション装置が有するサスペンションスプリングおよびダンパによって発生させられる力であって、前輪側および後輪側の左右のばね下部の相対変位動作に依存して生じて車体のロールを生じさせる力であるロール強制力を、低減させるための強制力低減モデルを採用し、その強制力低減モデルに従って、前記サスペンションスプリングおよびダンパが実際に発生させるロール強制力と低減させたロール強制力との差である低減力の推定を行い、その推定に基づいて、前記目標路面起伏起因ロール抑制力を決定するように構成された強制力低減型ロール抑制力決定部と
の少なくとも一方を有する(8)項に記載の車体ロール抑制システム。
前記スカイフックモデルに従って車体のロール動作の推定を行い、その推定に基づいて、前記スカイフックスプリングとスカイフックダンパとの少なくとも一方が発生させるロール抑制力を推定するように構成された(10)項に記載の車体ロール抑制システム。
前輪側の左右のばね上部とばね下部との距離の相対変動である前輪側の相対ストローク動作と後輪側の左右のばね上部とばね下部との距離の相対変動である後輪側の相対ストローク動作との少なくとも一方に基づいて、前記車体のロール動作の推定を行うように構成された(11)項に記載の車体ロール抑制システム。
測定された前記前輪側の左右のばね上部とばね下部との距離に基づく前記前輪側の相対ストローク動作と、その測定された前輪側の左右のばね上部とばね下部との距離,当該車両の走行速度および当該車両のホイールベースに基づいて推定された前記後輪側の相対ストローク動作とに基づいて、前記車体のロール動作の推定を行うように構成された(12)項に記載の車体ロール抑制システム。
当該車両の旋回に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標車両旋回依拠ロール抑制力を決定する車両旋回起因ロール抑制力決定部を有し、
前記スカイフック型ロール抑制力決定部が、
前記車両旋回起因ロール抑制力決定部によって決定された目標車両旋回依拠ロール抑制力によって生じる前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作との少なくとも一方を推定し、その推定された前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作との少なくとも一方を除外した前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作との少なくとも一方に基づいて、前記車体のロール動作の推定を行うように構成された(12)項または(13)項に記載の車体ロール抑制システム。
前記強制力低減モデルが、それら前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものを低減させるように設定されたものである(15)項または(16)項に記載の車体ロール抑制システム。
前記前輪側スプリング強制力,前記後輪側スプリング強制力が、それぞれ、前記前輪側スプリングの各々のばね定数によって定まる前輪側ロールばね定数,前記後輪側スプリングの各々のばね定数によって定まる前輪側ロールばね定数に依拠した大きさの力となり、前記前輪側ダンパ強制力,前記後輪側ダンパ強制力が、それぞれ、前記前輪側ダンパの各々の減衰係数によって定まる前輪側ロール減衰係数,前記後輪側ダンパの各々の減衰係数によって定まる後輪側ロール減衰係数に依拠した大きさの力となるように設定され、かつ、
それら前輪側ロールばね定数,後輪側ロールばね定数,前輪側ロール減衰係数,後輪側ロール減衰係数のうちの1以上のものを、その1以上の各々に対応する前記前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものに対して設定された前記低減率に基づいて低減させるように設定されたものである(18)項に記載の車体ロール抑制システム。
車体のロールを抑制するための力を車体のロール量に応じて車体に作用させるロール抑制スプリングと車体のロール速度に応じて車体に作用させるロール抑制ダンパとの少なくとも一方が配備されたものであり、かつ、
前記前輪側ロールばね定数と前記後輪側ロールばね定数との少なくとも一方を低減させる場合には、それらの低減させる分に相当するロールばね定数を有する前記ロール抑制スプリングが少なくとも配備され、前記前輪側ロール減衰定数と前記後輪側ロール減衰定数との少なくとも一方を低減させる場合には、それらの低減させる分に相当するロール減衰定数を有する前記ロール抑制ダンパが少なくとも配備されたものである(19)項に記載の車体ロール抑制システム。
前記前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものの各々に対して設定された前記低減率のうちの1以上のものを、当該車両の走行速度に基づいて変更するように構成された(18)項ないし(20)項のいずれか1つに記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度以下である場合に、前記前輪側スプリング強制力および前記前輪側ダンパ強制力に対して設定された前記低減率を0とし、前記後輪側スプリング強制力および前記後輪側ダンパ強制力に対して設定された前記低減率を1とするように構成された(21)項に記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度以上である場合において、当該車両の走行速度が高いときに、低いときに比較して、前記前輪側スプリング強制力に対して設定された前記低減率を大きくするように構成された(21)項または(22)項に記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度以上である場合において、当該車両の走行速度が高いときに、低いときに比較して、前記前輪側ダンパ強制力に対して設定された前記低減率を小さくするように構成された(21)項ないし(23)項のいずれか1つに記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度以上である場合において、当該車両の走行速度が高いときに、低いときに比較して、前記後輪側スプリング強制力に対して設定された前記低減率を小さくするように構成された(21)項ないし(24)項のいずれか1つに記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度以上である場合において、当該車両の走行速度が高いときに、低いときに比較して、前記後輪側ダンパ強制力に対して設定された前記低減率を大きくするように構成された(21)項ないし(25)項のいずれか1つに記載の車体ロール抑制システム。
前記強制力低減モデルに従って前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行い、その推定に基づいて、前記低減力を推定するように構成された(15)項ないし(26)項のいずれか1つに記載の車体ロール抑制システム。
(i)前輪側における左輪側のばね上部とばね下部との距離と右輪側のばね上部とばね下部との距離との相対変動である前輪側の相対ストローク動作と、後輪側における左輪側のばね上部とばね下部との距離と右輪側のばね上部とばね下部との距離との相対変動である後輪側の相対ストローク動作との少なくとも一方と、(ii)車体のロール動作との少なくとも一方に基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成された(27)項に記載の車体ロール抑制システム。
前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定と、前記車体のロール動作に基づく推定とを、択一的に行うように構成された(28)項に記載の車体ロール抑制システム。
当該車両の走行速度が設定閾速度より高い場合において、前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定を行い、当該車両の走行速度が設定閾速度より低い場合において、前記車体のロール動作に基づく推定を行うように構成された(29)項に記載の車体ロール抑制システム。
前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定を行う場合において、測定された前輪側の左右のばね上部とばね下部との距離に基づく前記前輪側の相対ストローク動作と、その測定された前輪側の左右のばね上部とばね下部との距離,当該車両の走行速度および当該車両のホイールベースに基づいて推定された前記後輪側の相対ストローク動作とに基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成された(28)項ないし(30)項のいずれか1つに記載の車体ロール抑制システム。
前記車体のロール動作に基づく推定を行う場合において、測定された車体のロール量に基づく車体のロール動作車体のロール動作と、当該車両の走行速度および当該車両のホイールベースとに基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成された(28)項ないし(31)項のいずれか1つに記載の車体ロール抑制システム。
当該車両の旋回に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標車両旋回依拠ロール抑制力を決定する車両旋回起因ロール抑制力決定部を有し、
前記強制力低減型ロール抑制力決定部が、
前記車両旋回起因ロール抑制力決定部によって決定された目標車両旋回依拠ロール抑制力によって生じる前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作ととの少なくとも一方と車体のロール動作との少なくとも一方を推定し、その推定された前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作との少なくとも一方と車体のロール動作との少なくとも一方を除外した前記前輪側の相対ストローク動作と前記後輪側の相対ストローク動作との少なくとも一方と車体のロール動作との少なくとも一方に基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成された(28)項ないし(32)項のいずれか1つに記載の車体ロール抑制システム。
前記スカイフック型ロール抑制力決定部と前記強制力低減型ロール抑制力決定部との両方を有する(9)項ないし(33)項のいずれか1つに記載の車体ロール抑制システム。
前記スカイフック型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力と、前記強制力低減型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力とを、設定重み付け係数を用いた重み付けをして和することにより、前記目標路面起伏起因ロール抑制力を決定するように構成された(34)項に記載の車体ロール抑制システム。
当該車両が走行する路面に起因した車体のロール振動が、比較的高い周波数の振動成分が大きい場合には、前記スカイフック型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力に対する重み付けを大きく、比較的低い周波数の振動成分が大きい場合には、前記強制力低減型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力に対する重み付けを大きくするように構成された(35)項に記載の車体ロール抑制システム。
前記前輪側および後輪側のロール抑制装置の各々が、
左右のサスペンション装置が有する車輪保持部材に両端部が連結されてロール抑制力を発生させるスタビライザバーを備え、前記アクチュエータが自身の作動量に応じて前記スタビライザバーが発生させるロール抑制力を変更するように構成された(1)項ないし(36)項のいずれか1つに記載の車体ロール抑制システム。
それぞれが、車幅方向に延びる1つの軸線上に配設されるトーション部と、そのトーション部に連続してそのトーション部と交差して延びるとともに先端部において前記車輪保持部材に連結されるアーム部とを有する1対のスタビライザバー部材を含んで構成され、
前記アクチュエータが、前記1対のスタビライザバー部材のトーション部を前記軸線のまわりに相対回転させるものである(37)項に記載の車体ロール抑制システム。
(a)全体構成
図1に、本実施例の車体ロール抑制システム10を模式的に示す。本車体ロール抑制システム10は、車両の前輪側、後輪側の各々に配設された1対のロール抑制装置である1対のスタビライザ装置14を含んで構成されている。スタビライザ装置14はそれぞれ、両端部において左右の車輪16を保持する車輪保持部材としてのサスペンションアーム(図2,3参照)に連結されたスタビライザバー20を備えている。そのスタビライザバー20は、それが分割された1対のスタビライザバー部材22を含む構成のものとされている。それら1対のスタビライザバー部材22は、アクチュエータ26によって相対回転可能に接続されている。
本システム10を搭載する車両には、各車輪16に対応した4つのサスペンション装置が設けられている。転舵輪である前輪のサスペンション装置と非転舵輪である後輪のサスペンション装置とは、車輪を転舵可能とする機構を除き略同様の構成とみなせるため、説明の簡略化に配慮して、後輪のサスペンション装置を代表して説明する。図2,3に示すように、サスペンション装置30は、独立懸架式のものであり、マルチリンク式サスペンション装置とされている。サスペンション装置30は、それぞれがサスペンションアームである第1アッパアーム32,第2アッパアーム34,第1ロアアーム36,第2ロアアーム38,トーコントロールアーム40を備えている。5本のアーム32,34,36,38,40のそれぞれの一端部は、車体に回動可能に連結され、他端部は、車輪16を回転可能に保持するアクスルキャリア42に回動可能に連結されている。それら5本のアーム32,34,36,38,40により、アクスルキャリア42は、車体に対して略一定の軌跡を描くような上下動が可能とされている。また、サスペンション装置30は、サスペンションスプリングであるコイルスプリング44と、ダンパである液圧式のショックアブソーバ46とを備えており、それらは、それぞれ、タイヤハウジングに設けられたマウント部と、第2ロアアーム38との間に、互いに並列的に配設されている。つまり、サスペンション装置30は、車輪16と車体とを、つまり、ばね下部とばね上部とを、弾性的に相互支持するとともに、それらの接近離間動作(以下、「ストローク動作」という場合がある)に対する減衰力を発生させる構造とされている。
スタビライザ装置14の各スタビライザバー部材22はそれぞれ、図2,3に示すように、概して車幅方向に延びるトーションバー部50と、トーションバー部50と一体をなしてそれと交差して概ね車両の前方に延びるアーム部52とに区分することができる。各スタビライザバー部材22のトーションバー部50は、アーム部52に近い箇所において、車体に固定的に設けられた保持具54によって回転可能に保持され、互いに同軸的に配置されている。各トーションバー部50の端部(アーム部52側とは反対側の端部)は、それぞれ、後に詳しく説明するようにアクチュエータ26に接続されている。一方、各アーム部52の端部(トーションバー部50側とは反対側の端部)は、リンクロッド56を介して第2ロアアーム38に連結されている。第2ロアアーム38には、リンクロッド連結部58が設けられ、リンクロッド56の一端部は、そのリンクロッド連結部58に、他端部はスタビライザバー部材22のアーム部52の端部に、それぞれ遥動可能に連結されている。
以上の構成から、車両が旋回する場合にはその旋回に起因して、車両が起伏のある路面を走行する場合にはその路面の起伏に起因して、車体にロールモーメントが作用する。そのロールモーメントによって、各サスペンション装置30には、左右の車輪16の一方と車体との距離と、左右の車輪16の他方と車体との距離とを相対変化させる力、つまり、左右におけるばね上部とばね下部との距離を相対変動させる力が作用し、相対ストローク動作が発生する。この相対ストローク動作に対して、前輪側および後輪側の各々の左右のコイルスプリング44は、相対ストローク量を減少させる向きに弾性反力を発生させる。また、前輪側および後輪側の各々の左右のショックアブソーバ46は、相対ストローク速度に応じた減衰力を発生させる。上記弾性反力は、左右のコイルスプリング44のばね定数によって定まる特定のロールばね定数に依拠した大きさの力となり、上記減衰力は、左右のショックアブソーバ46の減衰係数によって定まる特定のロール減衰係数に依拠した大きさの力となる。
F’=KSST+KSD ・・・(1’)
KS:スタビライザバーのロールばね定数
ST:相対ストローク量
D:スタビライザ装置の作動量
ここで、スタビライザバー20のロールばね定数KSは、2つのスタビライザバー部材22が一体化されたと仮定した場合のロールばね定数であり、スタビライザバー20自体の固有値である。相対ストローク量STは、左輪側のばね上部とばね下部との距離と右輪側のばね上部とばね下部との距離の差と考えることができる。また、スタビライザ装置14の作動量Dとは、アクチュエータ26の作動によって相対ストローク量ST換算で自身がどのぐらい作動したかを示す量と観念できるものであり、次式(2)で近似することができる。
D=ALA/R ・・・(2)
A:アクチュエータの作動量(回転角)
LA:スタビライザバー部材のアーム部の長さ
R:第2ロアアームのレバー比
ちなみに、アクチュエータの作動量Aは、スタビライザ装置14の作動量Dが0である状態を基準とした作動量、つまり、中立位置からの作動量である。
F=KSD ・・・(1)
本車体ロール抑制システム10では、図1に示すように、2つのスタビライザ装置14を統括して制御する電子制御ユニット(ECU)90が設けられている。ECU90は、各スタビライザ装置14、詳しくは、各アクチュエータ26の作動を個別に制御可能な制御装置であり、それぞれが各アクチュエータ26が有する電動モータ60に対応した駆動回路である2つのインバータ92と、CPU,ROM,RAM等を備えたコンピュータを主体とするコントローラ96とを備えている(図11参照)。インバータ92の各々は、コンバータ98を介してバッテリ100に接続されており、対応するスタビライザ装置14の電動モータ60に接続されている。電動モータ60は定電圧駆動され、電動モータ60への供給電力は、供給電流量を変更することによって変更される。供給電流量の変更は、インバータ92がPWM(Pulse Width Modulation)によるパルスオン時間とパルスオフ時間との比(デューティ比)を変更することによって行われる。
本車体ロール抑制システム10において行われるロール抑制制御は、車両の旋回に起因する車体のロールを抑制するための車両旋回起因ロール抑制制御と、車両が走行する路面の起伏に起因する車体のロールを抑制する路面起伏起因ロール抑制制御との2つの制御があり、本システム10では、それら2つの制御が同時に実行可能とされ、2つの制御のいずれにおいても、前輪側および後輪側のスタビライザ装置14が個別に制御される。以下に、上記2つの制御を順に説明し、その後に、それらの制御が同時に実行された場合におけるロール抑制力の2つのスタビライザ装置への配分について説明する。
車両旋回起因ロール抑制制御は、車両の旋回に起因して車体に作用するロールモーメント指標に基づいて、前輪側および後輪側のスタビライザ装置14の両者によって発生させるべきロール抑制力を、目標車両旋回起因ロール抑制力FTとして決定して行われる。決定された目標車両旋回起因ロール抑制力FTは、前輪側および後輪側のスタビライザ装置14の各々が発生させるべきロール抑制力である目標装置個別ロール抑制力FD(前輪側装置個別ロール抑制力FDf、後輪側装置個別ロール抑制力FDrと区別して呼ぶ場合がある)に配分され、その目標装置個別ロール抑制力FDに基づいて、各スタビライザ装置14が制御作動させられることによって行われる。
GY *=εcGYc+εrGYr ・・・(3)
GYc:推定横加速度
GYr:実横加速度
εc:制御ゲイン
εr:制御ゲイン
推定横加速度GYcは、ステアリングホイールの操作角δと車速vに基づいて推定される。操作角δは、車両の操舵量(操舵角)を指標するものであり、ステアリングセンサ102によって検出された値が用いられる。車速vは、ブレーキECU108において車輪速センサ110の検出値に基づいて推定され、ブレーキECU108から送られてくる値が用いられる。実横加速度GYrは、横加速度センサ104による検出値が用いられる。制御ゲインεc,εrは、車両旋回起因ロール抑制制御の応答性等に鑑み、適切な値に設定されている。
路面起伏起因ロール抑制制御は、設定されたロール挙動モデルに従って、前輪側および後輪側のスタビライザ装置14の両者によって発生させるべきロール抑制力の合計を、目標路面起伏起因ロール抑制力FUとして決定して行われる。決定された目標車両旋回起因ロール抑制力FUは、前輪側および後輪側のスタビライザ装置14の各々が発生させるべきロール抑制力である目標装置個別ロール抑制力FDに配分され、その目標装置個別ロール抑制力FDに基づいて、各スタビライザ装置14が制御作動させられることによって行われる。
図5に、実際のサスペンション装置およびスタビライザ装置の構成に基づくロール挙動モデル(以下、「実装置モデル」という場合がある)を示す。このモデルは、路面起伏ロール抑制制御において目標となるロール抑制力である目標路面起伏起因ロール抑制力FUを決定するために、後に説明する2つの理想制御状態モデルと対照されるモデルである。
[Is2+(Cf+Cr)s+(Kf+Kr)]X
=(Cfs+Kf)Xf+(Crs+Kr)Xr+KSfDf+KSrDr ・・・(4)
s:ラプラス演算子、d/dt,iω
I:車体慣性モーメント
X:車体ロール量
Xf:前輪側ばね下部相対変位量
Xr:後輪側ばね下部相対変位量
Cf:前輪側ダンパロール減衰係数
Cr:後輪側ダンパロール減衰係数
Kf:前輪側スプリングロールばね定数
Kr:後輪側スプリングロールばね定数
KSf:前輪側スタビライザバーのロールばね定数
KSr:後輪側スタビライザバーのロールばね定数
Df:前輪側スタビライザ装置作動量
Dr:後輪側スタビライザ装置作動量
上記式(4)に基づけば、前輪側および後輪側のスタビライザ装置14が発生させるロール抑制力F(詳しくは、制御ロール抑制力)は、下記式(5)のようになる。
F=KSfDf+KSrDr ・・・(5)
先に説明したように、スタビライザバー20の基本的ロール抑制力は、車体のロールを抑制するために相対ストローク対応スプリング144によって発生させられる力の一部と擬制しているため、下記式(6),(7)が成立している。
Kf=KCf+KSf ・・・(6)
Kr=KCr+KSr ・・・(7)
KCf:前輪側相対ストローク対応スプリングのみに基づくロールばね定数
KCr:後輪側相対ストローク対応スプリングのみに基づくロールばね定数
また、前輪側のばね下部の相対変位に対しての後輪側のばね下部の相対変位の遅れ、つまり、後輪側ばね下部変位遅れに基づけば、下記式(8),(9),(10)が成立する。
Xr=Xfe-τs ・・・(8)
e-τs≒ (2−τs)/(2+τs) ・・・(9)
τ=L/v ・・・(10)
L:ホイールベース
v:車速
e-τs:後輪側ばね下部変位遅れ係数
ちなみに、上記式(9)は、近似のための式である。
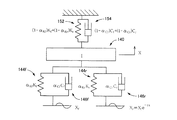
前述の2つのタイプの制御のうちの1つであるスカイフック型ロール抑制制御では、上記実装置モデルと対照される理想制御状態モデルとして、図6に示すスカイフックモデルを採用する。このスカイフックモデルでは、前輪側(図における左側)のばね上部とばね下部との間に、前輪側スプリング144fおよび前輪側ダンパ146fとが配備され、後輪側(図における右側)のばね上部とばね下部との間に、後輪側スプリング144rおよび後輪側ダンパ146rが配備されている。そのような基本的モデルに加え、スカイフックモデルでは、スカイフックスプリング148およびスカイフックダンパ150が配備されている。それらスカイフックスプリング148およびスカイフックダンパ150は、車体140のロールをスカイフック理論に基づいて抑制する機能を有する。
[Is2+(Cfs+Kf)+(Crs+Kr)+(ΔCs+ΔK)]X
=(Cfs+Kf)Xf+(Crs+Kr)Xr ・・・(11)
ΔC:スカイフックダンパのロール減衰係数
ΔK:スカイフックスプリングのロールばね定数
ちなみに、上記式(11)の右辺は、いわゆるロール強制力と呼ぶことができる力を意味している。このロール強制力とは、左右のばね下部の相対変位動作に依存して生じ、車体のロールを生じさせる力と考えることができる。一方、左辺は、車体のロールを抑制するための力と考えることができる。
FS=KSfDf+KSrDr=−(ΔCs+ΔK)X ・・・(12)
STf=Xf−X ・・・(13)
なお、本システム10では、先に説明したように、車両旋回起因ロール抑制制御も実行されており、測定された前輪側相対ストローク量STfは、その制御の影響を受けている。そこで、現時点で発生させられている目標車両旋回起因ロール抑制力FTに基づき、先に説明した車両旋回起因ロール抑制力マップが参照されて抑制相対ストローク量ΔSTが求められ、その抑制相対ストローク量ΔSTを除外する補正が、下記式(14)に従い、車体のロール量Xを推定に先立って行われる。
STf=STf−ΔST ・・・(14)
X=STf[(Cfs+Kf)+(Crs+Kr)e-τs]
/[Is2+(1−e-τs)(Crs+Kr)+(ΔCs+ΔK)] ・・・(15)
この推定された車体のロール量Xに基づいて、先の式(12)に従って、スカイフック型ロール抑制力FSが決定されるのである。
iii-a)強制力低減モデル
前述の2つのタイプの制御のうちのもう1つである強制力低減型ロール抑制制御では、上記実装置モデルと対照される理想制御状態モデルとして、図7に示す強制力低減モデルを採用する。この強制力低減モデルでは、前述の基本的モデルに加え、ロール抑制スプリング152およびロール抑制ダンパ154が配備されている。
[Is2+[αCfCfs+αKfKf]+[αCrCrs+αKrKr]
+[(1−αCf)Cf+(1−αCr)Cr]s+[(1−αKf)Kf+(1−αKr)Kr]]X
=(αCfCfs+αKfKf)Xf+(αCrCrs+αKrKr)Xr ・・・(16)
αCf:前輪側ダンパ強制力低減ゲイン
αCr:後輪側ダンパ強制力低減ゲイン
αKf:前輪側スプリング強制力低減ゲイン
αKr:後輪側スプリング強制力低減ゲイン
上記式(16)を簡単にすると、下記式(17)のようになる。
[Is2+(Cf+Cr)s+(Kf+Kr)]X
=(αCfCfs+αKfKf)Xf+(αCrCrs+αKrKr)Xr ・・・(17)
ちなみに、前記スカイフックモデルと同様、上記式(16),(17)の右辺は、いわゆるロール強制力を意味しており、左辺は、車体のロールを抑制するための力と考えることができる。
KC=(1−αKf)Kf+(1−αKr)Kr ・・・(18)
CC=(1−αCf)Cf+(1−αCr)Cr ・・・(19)
つまり、ロール抑制スプリング152およびロール抑制ダンパ154は、ロール強制力の低減によって生じた車体のロールの減衰能力の低下を、低減力に応じて補完する機能を有するものと考えることができるのである。この機能により、発生した車体のロールが効果的に減衰されることになる。
FR=KSfDf+KSrDr
=−[(1−αCf)Cfs+(1−αKfKf)]Xf
−[(1−αCr)Crs+(1−αKrKr)]Xr ・・・(20)
上記式(20)から解るように、強制力低減型ロール抑制力FSの決定においては、前輪側、後輪側の各々のばね下部相対変位量Xf,Xrを推定する必要がある。そこで、本システム10の強制力低減型ロール抑制制御では、それらばね下部相対変位量Xf,Xrの推定が行われるのであるが、その推定は、2つの互いに異なる推定手法のいずれかによって行われる。
Xf=STf[Is2+(Cf+Cr)s+(Kf+Kr)]/B ・・・(21)
〔B=Is2+(1−αCf)Cfs+(1−αCre-τs)Crs
+(1−αKf)Kf+(1−αKre-τs)Kr〕
Xr=Xfe-τs ・・・(22)
X=X−ΔX ・・・(23)
また、第2推定手法に従う推定においても、後輪側ばね下部変位遅れ係数e-τsに基づく推定、つまり、前記式(8)に従う後輪側ばね下部相対変位量Xrの推定が利用される。この第2推定手法では、ばね下部相対変位量Xf,Xrは、下記式(24),(25)に従って推定される。
Xf=X[Is2+(Cf+Cr)s+(Kf+Kr)]
/[(αCfCfs+αKfKf)+(αCrCrs+αKrKr)e-τs] ・・・(24)
Xr=Xfe-τs ・・・(25)
次に、ロール強制力の低減率、つまり、上記抑制力低減ゲインの設定に関して説明する。本強制力低減モデルにおいて、ロール強制力は、前輪側および後輪側の左右のばね下部の相対変位に依存して、相対ストローク対応スプリング144f,144rと相対ストローク対応ダンパ146f,146rによって発生させられる力である。具体的には、前記式(16),(17)における右辺が示す力であり、前輪側ロール強制力FEf,後輪側ロール強制力FErは、それぞれ、下記式(26),(27)のように表し、総称的にロール強制力FEとして表せば、下記式(28)のようになる。
FEf=(αCfCfs+αKfKf)Xf ・・・(26)
FEr=(αCrCrs+αKrKr)Xr ・・・(27)
FE=(αCCs+αKK)X ・・・(28)
上記式(28)から解るように、(αCCsX)は、ダンパ強制力であり、(αKKX)は、スプリング強制力である。
路面起伏起因ロール抑制制御では、上述した2つのタイプの制御、つまり、スカイフック型ロール抑制制御と強制力低減型ロール抑制制御が、情況に応じて、選択的に、あるいは、同時に実行される。
FU=FR ・・・(29)
FU=FRIL/(IL+IH)+FSIH/(IL+IH) ・・・(30)
IL:低周波振動成分強度
IH:高周波振動成分強度
この結果、車両走行速度が、設定閾速度v0を超えている場合において、高周波振動成分が相対的に大きいときには、スカイフック型ロール抑制制御に重きが置かれ、低周波振動成分が相対的大きいときには、強制力低減型ロール抑制制御に重きが置かれた路面起伏起因ロール抑制制御が実行されることになる。
以上のようにして決定された目標車両旋回起因ロール抑制力FTおよび標路面起伏起因ロール抑制力FUは、下記式(31)のようにして、単純に、合計される。その合計が、車両旋回起因ロール抑制制御と路面起伏ロール抑制制御とが統合されたロール抑制制御において、前輪側および後輪側のスタビライザ装置14によって発生させられるべきロール抑制力である目標ロール抑制力F*となる。
F*=FT+FU ・・・(31)
FDf=βF* ・・・(32)
FDr=(1−β)F* ・・・(33)
上記式(32),(33)から解るように、β:(1−β)が、前輪側スタビライザ装置14fと後輪側スタビライザ装置14rへの目標ロール抑制力F*の設定配分比となる。
Df=FDf/KSf ・・・(34)
Dr=FDr/KSr ・・・(35)
Af *=DfR/LA ・・・(36)
Ar *=DrR/LA ・・・(37)
上記決定されたアクチュエータ26の目標作動量Af *,Ar *に基づき、前輪側および後輪側のスタビライザ装置14の各々のアクチュエータ26の作動制御が行われる。アクチュエータ26の作動量Aと、電動モータ60の回転角であるモータ回転角θとは、減速機62の減速比によって対応付けられている。そのため、アクチュエータ26の作動制御はモータ回転角θに基づいて行われる。先ず、各アクチュエータ26の目標作動量Af *,Ar *に基づいて、各電動モータ60の制御の目標となる目標モータ回転角θf *,θr *が決定される。各電動モータ60の実際のモータ回転角である実モータ回転角θf,θrは、モータ回転角センサ78によって検出されており、それぞれの電動モータ60の実モータ回転角θf,θrが、それぞれの目標モータ回転角θf *,θr *になるように、電動モータ60が制御されるのである。
if *=γPΔθf+γIInt(Δθf) ・・・(38)
ir *=γPΔθr+γIInt(Δθr) ・・・(39)
Δθf,Δθr:モータ回転角偏差
Int(Δθf),Int(Δθr):偏差の時間的積分値
γP:比例項ゲイン
γI:積分項ゲイン
上記式は(38),(39)は、PI制御則に従う式であり、第1項,第2項は、それぞれ、目標供給電流i*の、モータ回転角偏差Δθに関する比例項成分、積分項成分を意味する。このような供給電流が電動モータ60に供給されることにより、スタビライザ装置14は、適切な目標ロール抑制力F*を発生させる。
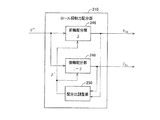
本システム10における上記ロール抑制制御は、制御装置としてのECU90のコントローラ96が、所定のロール抑制制御プログラムを実行することによって行われる。コントローラ96は、そのプログラムの実行によって、それぞれが、自身に割り当てられた処理を実行する複数の機能部を有することになる。以下、コントローラ96の複数の機能部の各々と、その各々による処理を、ロール抑制制御についての先の説明を参照しつつ説明する。
Claims (22)
- (a)ばね上部とばね下部とを弾性的に連結するサスペンションスプリングと(b)ばね上部とばね下部との相対動作に対しての減衰力を発生させるダンパとを有するサスペンション装置を前輪側および後輪側の左右の車輪の各々に対して備えた車両に設けられ、当該車両の車体のロールを抑制するための車体ロール抑制システムであって、
それぞれが、左右の車輪の一方に対応するばね上部とばね下部とを接近させつつ左右の車輪の他方に対応するばね上部とばね下部とを離間させる力となるロール抑制力を発生させるとともに、アクチュエータを有して、そのアクチュエータの作動によってそのロール抑制力を変更可能に構成された前輪側および後輪側ロール抑制装置と、
それら前輪側および後輪側のロール抑制装置の各々が発生させるべきロール抑制力である目標装置個別ロール抑制力を決定し、その決定された目標装置個別ロール抑制力に基づいて前記前輪側および後輪側のロール抑制装置の各々が有する前記アクチュエータの作動を制御することで、その各々を制御する制御装置と
を備え、
前記制御装置が、
当該車両が走行する路面の起伏に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標路面起伏起因ロール抑制力を決定する路面起伏起因ロール抑制力決定部を有する車体ロール抑制システム。 - 前記制御装置が、
路面起伏起因ロール抑制力決定部によって決定された前記目標路面起因ロール抑制力を、設定配分比に基づいて、前記前輪側および後輪側のロール抑制装置の各々の目標装置個別ロール抑制力に配分するロール抑制力配分部を有する請求項1に記載の車体ロール抑制システム。 - 前記ロール抑制力配分部が、前記前輪側および後輪側のロール抑制装置の各々の負荷に基づいて、前記設定配分比を変更するように構成された請求項2に記載の車体ロール抑制システム。
- 前記制御装置が、
当該車両の旋回に起因して生じる車体のロールを抑制するために、前記前輪側および後輪側のロール抑制装置の両方によって発生させるべきロール抑制力である目標車両旋回起因ロール抑制力を決定する車両旋回起因ロール抑制力決定部を有する請求項1ないし請求項3のいずれか1つに記載の車体ロール抑制システム。 - 前記制御装置が、
前記路面起伏起因ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力を、設定配分比に基づいて、前記前輪側および後輪側のロール抑制装置の各々の目標装置個別ロール抑制力に配分するロール抑制力配分部を有し、
そのロール抑制力配分部が、
前記路面起伏起因ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力と、前記車両旋回起因ロール抑制力決定部によって決定された前記目標車両旋回起因ロール抑制力とを合わせた力を、前記設定配分比に基づいて、前記前輪側および後輪側のロール抑制装装置の各々の目標装置個別ロール抑制力に配分するように構成された請求項4に記載の車体ロール抑制システム。 - 前記車両旋回起因ロール抑制力決定部が、
当該車両の旋回に起因して車体に作用するロールモーメントを指標する車両旋回起因ロールモーメント指標の値に基づいて、前記目標車両旋回依拠ロール抑制力を決定するように構成された請求項4または請求項5に記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、当該車両が走行する路面の起伏に起因して生じる車体のロールを抑制するために設定された仮想的なロール挙動モデルに従って、前記目標路面起伏起因ロール抑制力を決定するように構成された請求項1ないし請求項6のいずれか1つに記載の車体ロール抑制システム。
- 前記路面起伏起因ロール抑制力決定部が、
前記ロール挙動モデルとして、車体のロールを抑制するためのスカイフックスプリングとスカイフックダンパとの少なくとも一方が配備されたスカイフックモデルを採用し、そのスカイフックモデルに従って、前記スカイフックスプリングと前記スカイフックダンパとの少なくとも一方が車体のロールを抑制する力の推定を行い、その推定された力に基づいて、前記目標路面起伏起因ロール抑制力を決定するように構成されたスカイフック型ロール抑制力決定部と、
前記ロール挙動モデルとして、前記サスペンション装置が有するサスペンションスプリングおよびダンパによって発生させられる力であって、前輪側および後輪側の左右のばね下部の相対変位動作に依存して生じて車体のロールを生じさせる力であるロール強制力を、低減させるための強制力低減モデルを採用し、その強制力低減モデルに従って、前記サスペンションスプリングおよびダンパが実際に発生させるロール強制力と低減させたロール強制力との差である低減力の推定を行い、その推定に基づいて、前記目標路面起伏起因ロール抑制力を決定するように構成された強制力低減型ロール抑制力決定部と
の少なくとも一方を有する請求項7に記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、少なくとも前記スカイフック型ロール抑制力決定部を有し、
そのスカイフック型ロール抑制力決定部が、
前記スカイフックモデルに従って車体のロール動作の推定を行い、その推定に基づいて、前記スカイフックスプリングとスカイフックダンパとの少なくとも一方が発生させるロール抑制力を推定するように構成された請求項8に記載の車体ロール抑制システム。 - 前記スカイフック型ロール抑制力決定部が、
前輪側の左右のばね上部とばね下部との距離の相対変動である前輪側の相対ストローク動作と後輪側の左右のばね上部とばね下部との距離の相対変動である後輪側の相対ストローク動作との少なくとも一方に基づいて、前記車体のロール動作の推定を行うように構成され、かつ、
測定された前記前輪側の左右のばね上部とばね下部との距離に基づく前記前輪側の相対ストローク動作と、その測定された前輪側の左右のばね上部とばね下部との距離,当該車両の走行速度および当該車両のホイールベースに基づいて推定された前記後輪側の相対ストローク動作とに基づいて、前記車体のロール動作の推定を行うように構成された請求項9に記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、少なくとも前記強制力低減型ロール抑制力決定部を有し、
前記ロール強制力が、前記前輪側のサスペンション装置が有する2つのサスペンションスプリングである前輪側スプリングによって発生させられる前輪側スプリング強制力と、前記前輪側のサスペンション装置が有する2つのダンパである前輪側ダンパによって発生させられる前輪側ダンパ強制力と、前記後輪側のサスペンション装置が有する2つのサスペンションスプリングである後輪側スプリングによって発生させられる後輪側スプリング強制力と、前記後輪側のサスペンション装置が有する2つのダンパである後輪側ダンパによって発生させられる後輪側ダンパ強制力とを成分として含み、
前記強制力低減モデルが、それら前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものをその1以上のものの各々に対して設定された低減率に基づいて低減させるように設定されたものである請求項8ないし請求項11のいずれか1つに記載の車体ロール抑制システム。 - 前記強制力低減モデルが、
前記前輪側スプリング強制力,前記後輪側スプリング強制力が、それぞれ、前記前輪側スプリングの各々のばね定数によって定まる前輪側ロールばね定数,前記後輪側スプリングの各々のばね定数によって定まる前輪側ロールばね定数に依拠した大きさの力となり、前記前輪側ダンパ強制力,前記後輪側ダンパ強制力が、それぞれ、前記前輪側ダンパの各々の減衰係数によって定まる前輪側ロール減衰係数,前記後輪側ダンパの各々の減衰係数によって定まる後輪側ロール減衰係数に依拠した大きさの力となるように設定され、かつ、
それら前輪側ロールばね定数,後輪側ロールばね定数,前輪側ロール減衰係数,後輪側ロール減衰係数のうちの1以上のものを、その1以上の各々に対応する前記前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものに対して設定された前記低減率に基づいて低減させるように設定されたものである請求項11に記載の車体ロール抑制システム。 - 前記強制力低減モデルが、
車体のロールを抑制するための力を車体のロール量に応じて車体に作用させるロール抑制スプリングと車体のロール速度に応じて車体に作用させるロール抑制ダンパとの少なくとも一方が配備されたものであり、かつ、
前記前輪側ロールばね定数と前記後輪側ロールばね定数との少なくとも一方を低減させる場合には、それらの低減させる分に相当するロールばね定数を有する前記ロール抑制スプリングが少なくとも配備され、前記前輪側ロール減衰定数と前記後輪側ロール減衰定数との少なくとも一方を低減させる場合には、それらの低減させる分に相当するロール減衰定数を有する前記ロール抑制ダンパが少なくとも配備されたものである請求項12に記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
前記前輪側スプリング強制力,前輪側ダンパ強制力,後輪側スプリング強制力,後輪側ダンパ強制力のうちの1以上のものの各々に対して設定された前記低減率のうちの1以上のものを、当該車両の走行速度に基づいて変更するように構成された請求項11ないし請求項13のいずれか1つに記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
当該車両の走行速度が設定閾速度以下である場合に、前記前輪側スプリング強制力および前記前輪側ダンパ強制力に対して設定された前記低減率を1とし、前記後輪側スプリング強制力および前記後輪側ダンパ強制力に対して設定された前記低減率を0とするように構成された請求項14に記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
当該車両の走行速度が設定閾速度以上である場合において、当該車両の走行速度が高いときに、低いときに比較して、(A)前記前輪側スプリング強制力に対して設定された前記低減率を大きくすることと、(B)前記前輪側ダンパ強制力に対して設定された前記低減率を小さくすることと、(C)前記後輪側スプリング強制力に対して設定された前記低減率を小さくすることと、(D)前記後輪側ダンパ強制力に対して設定された前記低減率を大きくすることとの、いずれか1以上を行うように構成された請求項14または請求項15に記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、少なくとも前記強制力低減型ロール抑制力決定部を有し、
その強制力低減型ロール抑制力決定部が、
前記強制力低減モデルに従って前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行い、その推定に基づいて、前記低減力を推定するように構成された請求項11ないし請求項16のいずれか1つに記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
(i)前輪側における左輪側のばね上部とばね下部との距離と右輪側のばね上部とばね下部との距離との相対変動である前輪側の相対ストローク動作と、後輪側における左輪側のばね上部とばね下部との距離と右輪側のばね上部とばね下部との距離との相対変動である後輪側の相対ストローク動作との少なくとも一方と、(ii)車体のロール動作との少なくとも一方に基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成された請求項17に記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定と、前記車体のロール動作に基づく推定とを、択一的に行うように構成され、かつ、
当該車両の走行速度が設定閾速度より高い場合において、前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定を行い、当該車両の走行速度が設定閾速度より低い場合において、前記車体のロール動作に基づく推定を行うように構成された請求項18に記載の車体ロール抑制システム。 - 前記強制力低減型ロール抑制力決定部が、
前記前輪側の相対ストローク動作と後輪側の相対ストローク動作との少なくとも一方に基づく推定を行う場合において、測定された前輪側の左右のばね上部とばね下部との距離に基づく前記前輪側の相対ストローク動作と、その測定された前輪側の左右のばね上部とばね下部との距離,当該車両の走行速度および当該車両のホイールベースに基づいて推定された前記後輪側の相対ストローク動作とに基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行うように構成と、
前記車体のロール動作に基づく推定を行う場合において、測定された車体のロール量に基づく車体のロール動作と、当該車両の走行速度および当該車両のホイールベースとに基づいて、前記前輪側の左右のばね下部の相対変位動作と前記後輪側の左右のばね下部の相対変位動作との少なくとも一方の推定を行う構成と
との少なくとも一方を有する請求項18または請求項19に記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、
前記スカイフック型ロール抑制力決定部と前記強制力低減型ロール抑制力決定部との両方を有し、
前記スカイフック型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力と、前記強制力低減型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力とを、設定重み付け係数を用いた重み付けをして和することにより、前記目標路面起伏起因ロール抑制力を決定するように構成された請求項8ないし請求項20のいずれか1つに記載の車体ロール抑制システム。 - 前記路面起伏起因ロール抑制力決定部が、
当該車両が走行する路面に起因した車体のロール振動が、比較的高い周波数の振動成分が大きい場合には、前記スカイフック型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力に対する重み付けを大きく、比較的低い周波数の振動成分が大きい場合には、前記強制力低減型ロール抑制力決定部によって決定された前記目標路面起伏起因ロール抑制力に対する重み付けを大きくするように構成された請求項21に記載の車体ロール抑制システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270568A JP4333792B2 (ja) | 2007-10-17 | 2007-10-17 | 車体ロール抑制システム |
| CN200880107065.9A CN101801696B (zh) | 2007-10-17 | 2008-09-22 | 车身侧倾抑制系统 |
| EP08840611.1A EP2202105B1 (en) | 2007-10-17 | 2008-09-22 | Vehicle body roll constraint system |
| PCT/JP2008/067077 WO2009050983A1 (ja) | 2007-10-17 | 2008-09-22 | 車体ロール抑制システム |
| US12/677,232 US7949446B2 (en) | 2007-10-17 | 2008-09-22 | Body-roll restraining system for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007270568A JP4333792B2 (ja) | 2007-10-17 | 2007-10-17 | 車体ロール抑制システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009096366A true JP2009096366A (ja) | 2009-05-07 |
| JP4333792B2 JP4333792B2 (ja) | 2009-09-16 |
Family
ID=40567256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007270568A Expired - Fee Related JP4333792B2 (ja) | 2007-10-17 | 2007-10-17 | 車体ロール抑制システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7949446B2 (ja) |
| EP (1) | EP2202105B1 (ja) |
| JP (1) | JP4333792B2 (ja) |
| CN (1) | CN101801696B (ja) |
| WO (1) | WO2009050983A1 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012066612A1 (ja) * | 2010-11-15 | 2012-05-24 | トヨタ自動車株式会社 | 車両制御装置 |
| US10703160B2 (en) * | 2017-04-03 | 2020-07-07 | Toyota Jidosha Kabushiki Kaisha | Roll control apparatus for vehicle |
| US10906529B2 (en) | 2017-12-28 | 2021-02-02 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for four-wheel-drive vehicle |
| DE102021104969A1 (de) | 2020-03-04 | 2021-09-09 | Toyota Jidosha Kabushiki Kaisha | Vorrichtung zur vorausschauenden Dämpfungssteuerung für ein Fahrzeug und Verfahren zur vorausschauenden Dämpfungssteuerung für ein Fahrzeug |
| EP3904134A2 (en) | 2020-04-28 | 2021-11-03 | Toyota Jidosha Kabushiki Kaisha | Damping control device for vehicle, damping control system, damping control method, and data providing device |
| DE102021113136A1 (de) | 2020-06-02 | 2021-12-02 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren |
| DE102021113130A1 (de) | 2020-06-04 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren |
| DE102021113685A1 (de) | 2020-06-05 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Positionsschätzvorrichtung und positionsschätzverfahren |
| DE102021114120A1 (de) | 2020-06-08 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Fahrzeug-fahrzustand-steuervorrichtung und fahrzeug-fahrzustand-steuerverfahren |
| EP3922491A1 (en) | 2020-06-04 | 2021-12-15 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| DE102021114540A1 (de) | 2020-06-10 | 2021-12-16 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuerungsvorrichtung und dämpfungssteuerungsverfahren für fahrzeuge |
| DE102021114293A1 (de) | 2020-06-10 | 2021-12-16 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren für ein fahrzeug |
| EP3926532A1 (en) | 2020-06-16 | 2021-12-22 | Toyota Jidosha Kabushiki Kaisha | Data processing device and data processing system |
| DE102021116116A1 (de) | 2020-06-24 | 2021-12-30 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren für fahrzeuge |
| EP3932704A1 (en) | 2020-06-29 | 2022-01-05 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| US11279195B2 (en) * | 2019-07-30 | 2022-03-22 | Honda Motor Co., Ltd. | Individual active torsional springs |
| EP3992002A1 (en) | 2020-10-29 | 2022-05-04 | Toyota Jidosha Kabushiki Kaisha | Control method of vehicle and control apparatus thereof |
| US11904864B2 (en) | 2020-12-11 | 2024-02-20 | Toyota Jidosha Kabushiki Kaisha | Update system for related value information and update method for related value information |
| US11938775B2 (en) | 2020-10-30 | 2024-03-26 | Toyota Jidosha Kabushiki Kaisha | Damping control system |
| US12049115B2 (en) | 2020-04-28 | 2024-07-30 | Toyota Jidosha Kabushiki Kaisha | Vibration damping control apparatus for vehicle, and vibration damping control method |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4404018B2 (ja) * | 2005-06-16 | 2010-01-27 | トヨタ自動車株式会社 | 車両用スタビライザシステム |
| JP2010519089A (ja) | 2007-02-22 | 2010-06-03 | ダウ・コーニング・コーポレイション | 優れた耐火性及び耐衝撃性を有する複合品並びにそれの製造方法 |
| JP2009120009A (ja) * | 2007-11-14 | 2009-06-04 | Toyota Motor Corp | 車両用サスペンションシステム |
| JP4930411B2 (ja) * | 2008-02-26 | 2012-05-16 | トヨタ自動車株式会社 | 車両用サスペンションシステム |
| JP5724524B2 (ja) * | 2011-03-29 | 2015-05-27 | 日産自動車株式会社 | 車体振動制御装置、および車体振動制御方法 |
| JP5724523B2 (ja) * | 2011-03-29 | 2015-05-27 | 日産自動車株式会社 | 車体振動制御装置、および車体振動制御方法 |
| JP5979246B2 (ja) * | 2012-12-11 | 2016-08-24 | トヨタ自動車株式会社 | 車両の状態検出装置 |
| DE102013223424B4 (de) * | 2013-07-17 | 2021-03-04 | Schaeffler Technologies AG & Co. KG | Verfahren für den Betrieb eines Kraftfahrzeugs zur Erkennung einer Überbeanspruchung eines Wankstabilisators |
| KR102109475B1 (ko) * | 2013-11-26 | 2020-05-12 | 현대모비스 주식회사 | 차량용 액추에이터 및 이를 구비하는 차량 자세 제어 장치 |
| WO2017168065A1 (fr) * | 2016-03-29 | 2017-10-05 | Psa Automobiles S.A. | Systeme de suspension hydraulique d'un vehicule |
| US10435016B2 (en) | 2016-05-15 | 2019-10-08 | Mechanical Simulation Corporation | System and method to stabilize motorcycles |
| JP6443395B2 (ja) * | 2016-06-06 | 2018-12-26 | トヨタ自動車株式会社 | スタビライザ制御装置 |
| US10618370B2 (en) * | 2016-09-02 | 2020-04-14 | Mando Corporation | Active roll stabilizer |
| CN106314060A (zh) * | 2016-09-14 | 2017-01-11 | 合肥工业大学智能制造技术研究院 | 一种电动式主动稳定杆的控制系统及其控制方法 |
| JP6285591B1 (ja) * | 2017-03-24 | 2018-02-28 | 株式会社ショーワ | サスペンション制御装置、および、サスペンション装置 |
| DE102017209144A1 (de) * | 2017-05-31 | 2018-12-06 | Zf Friedrichshafen Ag | Vorrichtung und Verfahren zur Wankstabilisierung |
| CN107740843A (zh) * | 2017-11-17 | 2018-02-27 | 北京市劳动保护科学研究所 | 一种凸轮滚子负刚度结构低频隔振器 |
| DE102018217992A1 (de) * | 2018-10-22 | 2020-04-23 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Aktuators einer aktiven Fahrwerkeinrichtung und aktive Fahrwerkeinrichtung |
| CN109466269B (zh) * | 2018-10-29 | 2021-11-23 | 江苏大学 | 一种基于车联网的弯道预瞄空气悬架控制系统的控制方法 |
| DE102019213272A1 (de) * | 2019-09-03 | 2021-03-04 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines verstellbaren Wankstabilisators |
| US11383575B2 (en) * | 2020-02-25 | 2022-07-12 | GM Global Technology Operations LLC | Variable tire lateral load transfer distribution |
| JP2022147002A (ja) * | 2021-03-23 | 2022-10-06 | 本田技研工業株式会社 | ダンパ制御装置 |
| CN114571939A (zh) * | 2022-01-28 | 2022-06-03 | 安徽工程大学 | 一种可增强移动机器人路面通过性的力矩平衡系统及其控制方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6060024A (ja) * | 1983-09-09 | 1985-04-06 | Nissan Motor Co Ltd | 車両におけるロ−ル剛性制御装置 |
| JPS6064016A (ja) * | 1983-09-20 | 1985-04-12 | Nissan Motor Co Ltd | 車両におけるスタピライザ制御装置 |
| JPS60157911A (ja) * | 1984-01-27 | 1985-08-19 | Nissan Motor Co Ltd | 車両におけるサスペンシヨン制御装置 |
| DE3408292A1 (de) * | 1984-03-07 | 1985-08-29 | Daimler-Benz Ag, 7000 Stuttgart | Aktives federungssystem |
| JPH0811484B2 (ja) * | 1985-09-27 | 1996-02-07 | 日産自動車株式会社 | 車両のサスペンシヨン制御装置 |
| JPH0717137B2 (ja) * | 1986-10-16 | 1995-03-01 | 日本電装株式会社 | 油圧スタビライザ制御装置 |
| JP3037735B2 (ja) * | 1990-10-26 | 2000-05-08 | マツダ株式会社 | 車両のサスペンション装置 |
| JPH07228114A (ja) | 1994-02-16 | 1995-08-29 | Toyota Motor Corp | ショックアブソーバのための電気制御装置 |
| US6702265B1 (en) * | 1999-02-10 | 2004-03-09 | Erik Zapletal | Balanced suspension system |
| AU2003263180A1 (en) * | 2002-07-22 | 2004-02-09 | Michelin Recherche Et Technique S.A. | Vehicle wheel suspension device |
| EP1391330B1 (en) * | 2002-08-20 | 2010-02-24 | Mando Corporation | An anti-roll or anti-yaw suspension device for vehicles |
| JP4356305B2 (ja) * | 2002-11-19 | 2009-11-04 | 株式会社デンソー | 車両制御装置 |
| KR100534700B1 (ko) * | 2003-08-13 | 2006-01-09 | 현대자동차주식회사 | 자동차의 서스펜션 및 그 제어방법 |
| JP4421330B2 (ja) * | 2004-02-26 | 2010-02-24 | アイシン精機株式会社 | スタビライザ制御装置 |
| JP2005238971A (ja) * | 2004-02-26 | 2005-09-08 | Aisin Seiki Co Ltd | スタビライザ制御装置 |
| JP2006151262A (ja) * | 2004-11-30 | 2006-06-15 | Toyota Motor Corp | 車両用サスペンションシステム |
| JP4506522B2 (ja) * | 2005-03-16 | 2010-07-21 | トヨタ自動車株式会社 | サスペンションシステム |
| JP2006321296A (ja) | 2005-05-17 | 2006-11-30 | Toyota Motor Corp | 車両のロール抑制装置 |
| US8108104B2 (en) * | 2006-11-16 | 2012-01-31 | Ford Global Technologies, Llc | Tripped rollover mitigation and prevention systems and methods |
-
2007
- 2007-10-17 JP JP2007270568A patent/JP4333792B2/ja not_active Expired - Fee Related
-
2008
- 2008-09-22 US US12/677,232 patent/US7949446B2/en not_active Expired - Fee Related
- 2008-09-22 EP EP08840611.1A patent/EP2202105B1/en not_active Not-in-force
- 2008-09-22 WO PCT/JP2008/067077 patent/WO2009050983A1/ja active Application Filing
- 2008-09-22 CN CN200880107065.9A patent/CN101801696B/zh not_active Expired - Fee Related
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012066612A1 (ja) * | 2010-11-15 | 2012-05-24 | トヨタ自動車株式会社 | 車両制御装置 |
| US10703160B2 (en) * | 2017-04-03 | 2020-07-07 | Toyota Jidosha Kabushiki Kaisha | Roll control apparatus for vehicle |
| US10906529B2 (en) | 2017-12-28 | 2021-02-02 | Toyota Jidosha Kabushiki Kaisha | Control apparatus for four-wheel-drive vehicle |
| US11279195B2 (en) * | 2019-07-30 | 2022-03-22 | Honda Motor Co., Ltd. | Individual active torsional springs |
| US11919521B2 (en) | 2020-03-04 | 2024-03-05 | Toyota Jidosha Kabushiki Kaisha | Preview damping control apparatus for vehicle and preview damping control method for vehicle |
| DE102021104969A1 (de) | 2020-03-04 | 2021-09-09 | Toyota Jidosha Kabushiki Kaisha | Vorrichtung zur vorausschauenden Dämpfungssteuerung für ein Fahrzeug und Verfahren zur vorausschauenden Dämpfungssteuerung für ein Fahrzeug |
| EP3904134A2 (en) | 2020-04-28 | 2021-11-03 | Toyota Jidosha Kabushiki Kaisha | Damping control device for vehicle, damping control system, damping control method, and data providing device |
| US12049115B2 (en) | 2020-04-28 | 2024-07-30 | Toyota Jidosha Kabushiki Kaisha | Vibration damping control apparatus for vehicle, and vibration damping control method |
| US11932074B2 (en) | 2020-04-28 | 2024-03-19 | Toyota Jidosha Kabushiki Kaisha | Damping control device for vehicle, damping control system, damping control method, and data providing device |
| DE102021113136A1 (de) | 2020-06-02 | 2021-12-02 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren |
| EP3922491A1 (en) | 2020-06-04 | 2021-12-15 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| DE102021113130A1 (de) | 2020-06-04 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren |
| US11912090B2 (en) | 2020-06-04 | 2024-02-27 | Toyota Jidosha Kabushiki Kaisha | Damping control device and damping control method |
| US11584183B2 (en) | 2020-06-04 | 2023-02-21 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| DE102021113685A1 (de) | 2020-06-05 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Positionsschätzvorrichtung und positionsschätzverfahren |
| US11733396B2 (en) | 2020-06-05 | 2023-08-22 | Toyota Jidosha Kabushiki Kaisha | Position estimation device and position estimation method |
| DE102021114120A1 (de) | 2020-06-08 | 2021-12-09 | Toyota Jidosha Kabushiki Kaisha | Fahrzeug-fahrzustand-steuervorrichtung und fahrzeug-fahrzustand-steuerverfahren |
| US11897301B2 (en) | 2020-06-08 | 2024-02-13 | Toyota Jidosha Kabushiki Kaisha | Vehicle travel state control device and vehicle travel state control method |
| DE102021114120B4 (de) | 2020-06-08 | 2023-04-20 | Toyota Jidosha Kabushiki Kaisha | Fahrzeug-Fahrzustand-Steuervorrichtung und Fahrzeug-Fahrzustand-Steuerverfahren |
| DE102021114540B4 (de) | 2020-06-10 | 2022-12-08 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuerungsvorrichtung und dämpfungssteuerungsverfahren für fahrzeuge |
| DE102021114293B4 (de) | 2020-06-10 | 2022-12-08 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren für ein fahrzeug |
| US12103347B2 (en) | 2020-06-10 | 2024-10-01 | Toyota Jidosha Kabushiki Kaisha | Damping control device and damping control method for vehicle |
| DE102021114540A1 (de) | 2020-06-10 | 2021-12-16 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuerungsvorrichtung und dämpfungssteuerungsverfahren für fahrzeuge |
| US11945275B2 (en) | 2020-06-10 | 2024-04-02 | Toyota Jidosha Kabushiki Kaisha | Damping control device and damping control method for vehicle |
| DE102021114293A1 (de) | 2020-06-10 | 2021-12-16 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren für ein fahrzeug |
| EP3926532A1 (en) | 2020-06-16 | 2021-12-22 | Toyota Jidosha Kabushiki Kaisha | Data processing device and data processing system |
| US11814120B2 (en) | 2020-06-16 | 2023-11-14 | Toyota Jidosha Kabushiki Kaisha | Data processing device and data processing system |
| DE102021116116A1 (de) | 2020-06-24 | 2021-12-30 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und dämpfungssteuerverfahren für fahrzeuge |
| DE102021116116B4 (de) | 2020-06-24 | 2023-04-20 | Toyota Jidosha Kabushiki Kaisha | Dämpfungssteuervorrichtung und Dämpfungssteuerverfahren für Fahrzeuge |
| US11919353B2 (en) | 2020-06-24 | 2024-03-05 | Toyota Jidosha Kabushiki Kaisha | Damping control device and damping control method for vehicle |
| EP3932704A1 (en) | 2020-06-29 | 2022-01-05 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| US11884118B2 (en) | 2020-06-29 | 2024-01-30 | Toyota Jidosha Kabushiki Kaisha | Damping control apparatus and method for a vehicle |
| US11814036B2 (en) | 2020-10-29 | 2023-11-14 | Toyota Jidosha Kabushiki Kaisha | Control method of vehicle and control apparatus thereof |
| EP3992002A1 (en) | 2020-10-29 | 2022-05-04 | Toyota Jidosha Kabushiki Kaisha | Control method of vehicle and control apparatus thereof |
| US11938775B2 (en) | 2020-10-30 | 2024-03-26 | Toyota Jidosha Kabushiki Kaisha | Damping control system |
| US11904864B2 (en) | 2020-12-11 | 2024-02-20 | Toyota Jidosha Kabushiki Kaisha | Update system for related value information and update method for related value information |
Also Published As
| Publication number | Publication date |
|---|---|
| US7949446B2 (en) | 2011-05-24 |
| EP2202105B1 (en) | 2013-04-24 |
| EP2202105A4 (en) | 2011-12-21 |
| WO2009050983A1 (ja) | 2009-04-23 |
| CN101801696B (zh) | 2012-07-04 |
| CN101801696A (zh) | 2010-08-11 |
| US20100324780A1 (en) | 2010-12-23 |
| JP4333792B2 (ja) | 2009-09-16 |
| EP2202105A1 (en) | 2010-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4333792B2 (ja) | 車体ロール抑制システム | |
| US11958329B2 (en) | Roll vibration damping control system for vehicle, target roll moment computing method therefor, and non-transitory computer-readable storage medium | |
| JP4127298B2 (ja) | 車輪車体間距離調整装置および車輪車体間距離調整システム | |
| JP4386101B2 (ja) | 車両用サスペンションシステム | |
| JP4877240B2 (ja) | 車両用サスペンションシステム | |
| JP4244999B2 (ja) | 車両用スタビライザシステム | |
| JP4519113B2 (ja) | 車両用サスペンションシステム | |
| KR100978772B1 (ko) | 차량 스태빌라이저 시스템 | |
| US8116939B2 (en) | Suspension system for vehicle | |
| WO2012066612A1 (ja) | 車両制御装置 | |
| JP2006151262A (ja) | 車両用サスペンションシステム | |
| JP2009120009A (ja) | 車両用サスペンションシステム | |
| US20230249714A1 (en) | Vehicle behavior control system | |
| JP6753911B2 (ja) | 減衰力可変ダンパの制御装置 | |
| JP2009202621A (ja) | 車両用スタビライザシステム | |
| JPH1191329A (ja) | 接地荷重制御装置 | |
| JP2008162333A (ja) | 車両用サスペンションシステム | |
| JP2010006343A (ja) | 車両用サスペンションシステム | |
| JP2007083853A (ja) | 車両用サスペンションシステム | |
| JP2011084164A (ja) | サスペンション装置 | |
| WO2012029183A1 (ja) | 車両制御システム及び制御装置 | |
| JP2006182239A (ja) | 車両用サスペンションシステム | |
| JP2007186072A (ja) | 車両用スタビライザシステム | |
| JP2009179089A (ja) | 減衰力可変ダンパの制御装置 | |
| JP2009166631A (ja) | 車両用サスペンションシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090602 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4333792 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130703 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |