JP2009014367A - 回転角度検出装置及びこれを用いた電動機駆動装置 - Google Patents
回転角度検出装置及びこれを用いた電動機駆動装置 Download PDFInfo
- Publication number
- JP2009014367A JP2009014367A JP2007173669A JP2007173669A JP2009014367A JP 2009014367 A JP2009014367 A JP 2009014367A JP 2007173669 A JP2007173669 A JP 2007173669A JP 2007173669 A JP2007173669 A JP 2007173669A JP 2009014367 A JP2009014367 A JP 2009014367A
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- angle detection
- electric motor
- resolver
- excitation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000005284 excitation Effects 0.000 claims abstract description 85
- 238000001514 detection method Methods 0.000 claims description 78
- 238000006243 chemical reaction Methods 0.000 claims description 9
- 230000004907 flux Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 3
- 238000000819 phase cycle Methods 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- OOYGSFOGFJDDHP-KMCOLRRFSA-N kanamycin A sulfate Chemical group OS(O)(=O)=O.O[C@@H]1[C@@H](O)[C@H](O)[C@@H](CN)O[C@@H]1O[C@H]1[C@H](O)[C@@H](O[C@@H]2[C@@H]([C@@H](N)[C@H](O)[C@@H](CO)O2)O)[C@H](N)C[C@@H]1N OOYGSFOGFJDDHP-KMCOLRRFSA-N 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
Images
Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
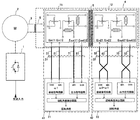
【解決手段】90度の位相差を有する2つの交流の励磁信号51、61を与えると共通の回転軸5の回転角度情報を含む出力信号71、81を出力するレゾルバ11と、レゾルバ11に励磁信号51、61を与え、且つ出力信号71、81から回転軸5の回転角度を検出する制御手段21とで回転角度検出ユニット41を構成する。同様にレゾルバ12と制御手段22とで回転角度検出ユニット41を構成し、これらの回転角度検出ユニット2組で回転角度検出装置を構成する。そして、一方の回転角度検出ユニットの励磁信号の相順を、他方の回転角度検出ユニットの交流励磁信号の相順とは逆となるようにする。
【選択図】図1
Description
Ein11=cosω1t (1)
Ein12=sinω1t (2)
が成立しているものとする。このときのレゾルバ11の出力信号71、81を夫々Eout11、Eout12とし、電動機2の回転速度をNとすると、
Eout11=−Ksin(ω1+N)t (3)
Eout12=Kcos(ω1+N)t (4)
となる。但しここで、励磁信号をEin1、Ein2、出力信号をEout1、Eout2としたときのレゾルバ11の出力電圧方程式は、以下の(5)、(6)式であるものとし、また励磁周波数ω1は回転速度nに対して十分大きい値であるものとする。
Eout2=K(Ein1・cosNt−Ein2・sinNt) (6)
(1)、(2)式に示したように、励磁信号の周波数がω1であり、(3)、(4)式に示したように出力信号の周波数がω1+Nであるので、励磁信号と出力信号の位相差を検出することによって電動機2の回転角度を検出することが可能となる。尚、ここで励磁信号を2相分与えるのは回転磁界を作るために必要であり、回転角のゼロ点を検出するために2相出力としている。
Ein21=sinω1t (7)
Ein22=cosω1t (8)
が成立する。このときのレゾルバ22の出力信号72、82を夫々Eout21、Eout22とすると、レゾルバ22はレゾルバ21を同一の構成となっているので、
Eout21=−Kcos(ω1−N)t (9)
Eout22=Ksin(ω1−N)t (10)
となる。そしてこの出力信号の相順を反転させて制御装置22の出力信号回路に与えれば、制御装置21と同一の制御装置22の構成及び動作原理によって、電動機2の回転角度を検出することができる。
で表すことができる。
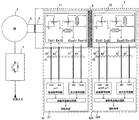
Ein21=cosω2t (11)
Ein22=sinω2t (12)
となり、レゾルバ12の出力信号Eout21、Eout22は、
Eout21=−Ksin(ω2+N)t (13)
Eout22=Kcos(ω2+N)t (14)
となる。(11)、(12)式に示したように、励磁信号の周波数がω2であり、(13)、(14)式に示したように出力信号の周波数がω2+Nであるので、励磁信号と出力信号の位相差を検出することによって電動機2の回転角度を検出することが可能となる。
2 電動機
3 回転子軸
4 回転角度検出器
5 回転軸
6 遮蔽部材
11、12 レゾルバ
21、22 制御装置
31、32 制御信号線
41、42 回転角度検出ユニット
51、52、61、62 励磁信号
71、72、81、82 出力信号
Claims (6)
- 90度の位相差を有する2つの交流の励磁信号を与えると共通の回転軸の回転角度情報を含む出力信号を出力するレゾルバと、
前記レゾルバに前記励磁信号を与え、且つ前記出力信号から前記回転軸の回転角度を検出する制御手段と
で構成される回転角度検出ユニット
を2組備え、
一方の前記回転角度検出ユニットの前記励磁信号の相順を、
他方の前記回転角度検出ユニットの前記励磁信号の相順とは逆となるようにしたことを特徴とする回転角度検出装置。 - 90度の位相差を有する2つの交流の励磁信号を与えると共通の回転軸の回転角度情報を含む出力信号を出力するレゾルバと、
前記レゾルバに前記励磁信号を与え、且つ前記出力信号から前記回転軸の回転角度を検出する制御手段と
で構成される回転角度検出ユニット
を複数組備え、
各々の前記回転角度検出ユニットの前記励磁信号の周波数を互いに異なる値としたことを特徴とする回転角度検出装置。 - 前記複数台のレゾルバで構成される回転角度検出器は、
共通のフレームによって一体構造となっていることを特徴とする請求項1または請求項2に記載の回転角度検出装置。 - 電動機と、
前記電動機の回転速度及び回転位置の少なくとも一方を制御する制御部を有し、前記電動機を駆動する電力変換装置と、
前記電動機の回転角度を検出する回転角度検出装置と
で構成される電動機駆動装置であって、
前記回転角度検出装置は、
90度の位相差を有する2つの交流の励磁信号を与えると前記電動機と共通の回転軸の回転角度情報を含む出力信号を出力するレゾルバと、
前記レゾルバに前記励磁信号を与え、且つ前記出力信号から前記回転軸の回転角度を検出する制御手段と
で構成される回転角度検出ユニット
を2組備え、
一方の前記回転角度検出ユニットの前記励磁信号の相順を、
他方の前記回転角度検出ユニットの前記励磁信号の相順とは逆となるようにし、
前記制御部は、
何れかの前記回転角度検出ユニットの検出信号を用いて前記電力変換装置を制御するようにしたことを特徴とする電動機駆動装置。 - 電動機と、
前記電動機の回転速度及び回転位置の少なくとも一方を制御する制御部を有し、前記電動機を駆動する電力変換装置と、
前記電動機の回転角度を検出する回転角度検出装置と
で構成される電動機駆動装置であって、
前記回転角度検出装置は、
90度の位相差を有する2つの交流の励磁信号を与えると前記電動機と共通の回転軸の回転角度情報を含む出力信号を出力するレゾルバと、
前記レゾルバに前記励磁信号を与え、且つ前記出力信号から前記回転軸の回転角度を検出する制御手段と
で構成される回転角度検出ユニット
を複数組備え、
各々の前記回転角度検出ユニットの前記励磁信号の周波数を互いに異なる値とし、
前記制御部は、
何れかの前記回転角度検出ユニットの検出信号を用いて前記電力変換装置を制御するようにしたことを特徴とする電動機駆動装置。 - 前記複数台のレゾルバで構成される回転角度検出器は、
共通のフレームによって一体構造となっていることを特徴とする請求項4または請求項5に記載の電動機駆動装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007173669A JP5055042B2 (ja) | 2007-07-02 | 2007-07-02 | 回転角度検出装置及びこれを用いた電動機駆動装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007173669A JP5055042B2 (ja) | 2007-07-02 | 2007-07-02 | 回転角度検出装置及びこれを用いた電動機駆動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009014367A true JP2009014367A (ja) | 2009-01-22 |
| JP5055042B2 JP5055042B2 (ja) | 2012-10-24 |
Family
ID=40355468
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007173669A Active JP5055042B2 (ja) | 2007-07-02 | 2007-07-02 | 回転角度検出装置及びこれを用いた電動機駆動装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5055042B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014025757A (ja) * | 2012-07-25 | 2014-02-06 | Aisan Ind Co Ltd | 角度センサ及び自動車 |
| JP2018080937A (ja) * | 2016-11-14 | 2018-05-24 | 多摩川精機株式会社 | 検出器 |
| JP2019124508A (ja) * | 2018-01-15 | 2019-07-25 | トヨタ自動車株式会社 | 回転角度検出装置 |
| WO2021144977A1 (ja) * | 2020-01-17 | 2021-07-22 | 三菱電機株式会社 | レゾルバおよび電動パワーステアリング装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6536632B2 (ja) * | 2016-12-09 | 2019-07-03 | Tdk株式会社 | 角度センサおよび角度センサシステム |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004271284A (ja) * | 2003-03-06 | 2004-09-30 | Nsk Ltd | 角度位置検出装置 |
| JP2005003620A (ja) * | 2003-06-13 | 2005-01-06 | Toyota Motor Corp | 磁気的位置検出装置 |
-
2007
- 2007-07-02 JP JP2007173669A patent/JP5055042B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004271284A (ja) * | 2003-03-06 | 2004-09-30 | Nsk Ltd | 角度位置検出装置 |
| JP2005003620A (ja) * | 2003-06-13 | 2005-01-06 | Toyota Motor Corp | 磁気的位置検出装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014025757A (ja) * | 2012-07-25 | 2014-02-06 | Aisan Ind Co Ltd | 角度センサ及び自動車 |
| JP2018080937A (ja) * | 2016-11-14 | 2018-05-24 | 多摩川精機株式会社 | 検出器 |
| JP2019124508A (ja) * | 2018-01-15 | 2019-07-25 | トヨタ自動車株式会社 | 回転角度検出装置 |
| WO2021144977A1 (ja) * | 2020-01-17 | 2021-07-22 | 三菱電機株式会社 | レゾルバおよび電動パワーステアリング装置 |
| JPWO2021144977A1 (ja) * | 2020-01-17 | 2021-07-22 | ||
| EP4092889A4 (en) * | 2020-01-17 | 2023-01-04 | Mitsubishi Electric Corporation | RESOLVER AND ELECTRIC POWER STEERING DEVICE |
| JP7297103B2 (ja) | 2020-01-17 | 2023-06-23 | 三菱電機株式会社 | レゾルバおよび電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5055042B2 (ja) | 2012-10-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5826292B2 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| WO2017159091A1 (ja) | モータ制御装置 | |
| JP5055042B2 (ja) | 回転角度検出装置及びこれを用いた電動機駆動装置 | |
| KR20130098809A (ko) | 모터용 위치검출센서의 페일 세이프 방법, 장치 및 시스템 | |
| JP2008050075A (ja) | エレベータの制御装置 | |
| JP2006023164A (ja) | レゾルバ故障診断回路 | |
| JP2008278622A (ja) | 1ピストンロータリーコンプレッサーのトルク制御方法 | |
| JP2008309755A (ja) | 回転角検出装置、及び電動パワーステアリング装置 | |
| JP2007028889A (ja) | 多相電動機の回転角検出装置 | |
| WO2019163341A1 (ja) | 制御装置 | |
| KR20200082358A (ko) | Bldc 모터 제어시스템 및 그 제어방법 | |
| WO2017010274A1 (ja) | 電力変換装置およびそれを搭載した電動パワーステアリング装置 | |
| JP2015010904A (ja) | 故障検知装置 | |
| US8928312B2 (en) | Method, device and system for monitoring the determination of a rotor angle of a rotating shaft by means of a resolver | |
| JP2020176885A (ja) | 冗長系センサ装置 | |
| JP2003164187A (ja) | モータ制御におけるセンサシステム | |
| WO2019054089A1 (ja) | モータ駆動装置、モータ、および電動パワーステアリング装置 | |
| JP2007318822A (ja) | センサレスブラシレスモータの駆動装置 | |
| JP5737604B2 (ja) | 電力変換装置 | |
| US12085418B2 (en) | Abnormality detection apparatus for resolver | |
| WO2006051590A1 (ja) | 回転検出装置 | |
| JP2006271064A (ja) | 電動パワーステアリング装置 | |
| WO2018092261A1 (ja) | 異常検出装置 | |
| JP4222425B2 (ja) | 多相負荷駆動装置 | |
| JP2002369570A (ja) | モータの制御方法およびモータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100519 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120106 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120404 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120717 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120730 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5055042 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150803 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |