JP2009006465A - ダイレクト操作装置および配電作業用ロボット - Google Patents
ダイレクト操作装置および配電作業用ロボット Download PDFInfo
- Publication number
- JP2009006465A JP2009006465A JP2007172670A JP2007172670A JP2009006465A JP 2009006465 A JP2009006465 A JP 2009006465A JP 2007172670 A JP2007172670 A JP 2007172670A JP 2007172670 A JP2007172670 A JP 2007172670A JP 2009006465 A JP2009006465 A JP 2009006465A
- Authority
- JP
- Japan
- Prior art keywords
- force sensor
- connector
- robot
- force
- hook
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Abstract
【解決手段】ダイレクト操作装置2を、基部20と、基部20に固定された複数の雄コネクタ21と、雄コネクタ21のいずれか1個に接続固定される雌コネクタ22とから構成し、雌コネクタ22が雄コネクタ21の接続を検知する圧電スイッチを内蔵した接合部と、接合部に設けられる力センサ部と、力センサ部を介して立設された少なくとも2自由度の回転機構を備えたフック部とを備え、力センサ部がフック部の引き回しによる力を検知して制御装置10へ出力するようにした。
【選択図】図1
Description
しかし、このようなコントローラは、複雑なスイッチ操作のために誤操作が発生しやすいといった問題があった。
また、このような問題に対処するために、別の構造のジョイスティック型コントローラは、ジョイスティックの外表面を軸方向で分割することにより該ジョイスティックの軸方向に複数の操作領域を形成して、制御対象と作動方向を特定することが出来るようにしたものもあった(例えば、特許文献2参照)。
また、作業者が作業中誤ってジョイスティックに接触し傾動操作を行ってしまい、ロボットの誤動作が発生して作業者への危険源が増加することも起こり得る。特に、配電作業用ロボットの操作においては絶縁性を考慮すると、直接素手で操作することが困難であり、安全上の観点から問題となっていた。
また、配電作業環境は屋外電柱上であり、その作業環境周囲には配電機器が多種多様に設置され、ダイレクト操作を行った際に装柱機器がロボットに接触して誤動作し、装柱機器などの周辺機器が触れただけで動作する可能性があり、非常に危険であるという問題があった。
本発明はこのような問題点に鑑みてなされたものであり、実際の配電作業での適用に耐えうる配電作業用ロボットのダイレクト操作装置とそれを用いたロボットを提供することを目的とする。
請求項2記載の発明は、請求項1記載のダイレクト操作装置において、前記複数の第1コネクタ部の接続端子配置が互いに異なっており、かつ前記第2コネクタ部は前記複数の第1コネクタ部の前記各接続端子と接続可能な構造となっていることを特徴としている。
請求項3記載の発明は、請求項2記載のダイレクト操作装置において、前記複数の第1コネクタ部は3個であり、それぞれ取付け軸の軸方向に直角な断面で90度、180度、270度の位置に設けられたことを特徴としている。
請求項4記載の発明は、請求項3記載のダイレクト操作装置において、前記フック部が前記取付け軸先端の複数の方向からの取り付けができ、前記力センサ部は取り付け位置の同定をする信号の出力をすることを特徴としている。
請求項5記載の発明は、請求項4記載のダイレクト操作装置において、前記フック部が前記力センサの正常状態を示すLEDを備えたことを特徴としている。
請求項6記載の発明は、請求項1〜5記載のダイレクト操作装置を搭載した配電作業用ロボットであって、長尺状の棒の先端に引っ掛け部を、その把持部にイネーブルスイッチと非常停止スイッチを備えた絶縁性の操作棒を備え、前記引っ掛け部を前記フック部に引っかけて操作することを特徴としている。
請求項7記載の発明は、請求項4又は5記載のダイレクト操作装置を搭載した配電作業用ロボットであって、前記力センサのセンサ情報を基に制御する制御装置と、前記力センサのセンサ情報と前記取り付け位置同定信号を無線で送信する無線通信手段とバッテリとを備え、前記制御装置は操作位置指令量を生成するインピーダンス制御部と、前記インピーダンス制御部の位置指令を入力して位置・速度制御処理を行う位置・速度制御部と、前記位置・速度制御部の出力に応じて前記ロボットの各関節部のモータを制御するサーボアンプ部を備えたことを特徴としている。
また、対象作業に応じて操作位置を変更することが可能となり、作業性が格段に向上する。
また、マニピュレータの絶縁性が確実に確保されるため、極めて安全であり、またケーブルがないため耐久性と信頼性が増す。
また、作業者は力センサの異常状態を早期に発見することが可能となるため、作業者とロボットへの安全性が向上する。
また、絶縁操作棒の手元に、イネーブルSWと非常停止SWを備えているため、非常に安全な操作手段である。
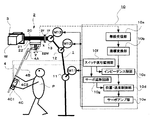
図1において、1は配電作業用ロボットである。ロボット1の先端にはフランジ1Fが取り付けてあり、このフランジ1Fに本発明に係るダイレクト操作装置2の基端部に設けられたフランジ2Fによって互いに固定されている。このダイレクト操作装置2の反対方向先端部分にはハンド3が設けられている。図ではハンド3によって部品Wが把持されている様子を例示している。また、ロボット1のアームをダイレクト操作装置2の基端部として用いてもよい。この場合、フランジ1F、2Fは省略できる。
ダイレクト操作装置2はフランジ2Fに固定される基部20(ロボット1のアーム)とこの基部20に固定された3個の第1コネクタ部(雄コネクタ)21(図1では1個のみ見えるが、図2では21a、21b、21cの3個が見える。)とこれら3個の第1コネクタ部21のいずれか1個と接続固定される第2コネクタ部(雌コネクタ)22(図3参照)とから構成されている。雄コネクタ
21と雌コネクタ22とは雄雌逆であってももちろん構わない。
3個の第1コネクタ部21a、21b、21cのうち2個の21aと21cは基部20の長さ方向に直角な断面で切った面で見て互いに180度離れた部位に埋込み固定され、第1コネクタ部21bは第1コネクタ部21aと21cの中間部位にて埋込み固定されている。各第1コネクタ部はそれぞれ矩形断面の差込ピン(21a1、21b1、21c1)と円形断面の差込ピン(21a2、21b2、21c2)とを備えている点で共通しているが、2種の差込ピンの互いの位置関係がそれぞれ異なっている点が特徴である。
(b)の断面図において、22Aは接合部、22Bは力センサ部、22Cはベース部、22Dはベース部22Cに取り付けられバッテリを内蔵した無線通信部、22Eはダイレクト操作装置2のロボット1への取り付け位置を検出してスイッチングデータ処理を行い取り付け位置を同定する取り付け位置同定出力部、22Fは力センサ22Bの上に立設された円筒状ロッド、22Gは円筒状ロッド22Fの軸中心周りに相対的に回転するロッド回転部、22Lはロッド回転部ロッド回転部22Gの孔に挿通され回転自在に固定されたフック部である。また、22Mはロッド回転部22Gの頂部に埋め込まれたLED(発光ダイオード)で、力センサ部22Bが正常状態であることをフック部22Lが表示している。作業者PはLED22Mで力センサの異常状態を早期に発見することが可能となるため、作業者Pとロボット1への安全性が向上する。
接合部22Aには矩形断面の嵌着孔221と円形断面の嵌着孔22a2、22b2、22c2がとそれぞれ90度間隔で設けられ、中に圧電スイッチ221k、22ak、22bk、22ck(図では221k1と22akが見える)が配置されている。各圧電スイッチから配線(図では22B1と22B2が見える)が取り付け位置同定出力部22Eまで延びている。
上述したように、力センサ22Bの底部にある接合部22Aに設けられた1箇所の矩形断面の嵌着孔221と3箇所の円形断面の嵌着孔22a2、22b2、22c2の孔には、それぞれ圧電スイッチ221k、22ak、22bk、22ckが配設されており、作業者Pが操作装置2の基部を持って第2コネクタ部22を3個の第1コネクタ部21a、21b、21cのいずれかに押し当てて接続固定すると、押し当てられた2個の圧電スイッチがONとなり、このONパターンを位置同定出力部22Eはスイッチングデータ処理することでどの第1コネクタ部21a、21b、21cが使用されるのかを知ることが出来る。例えば第2コネクタ部22の接合部22A(図2)を第1コネクタ部21aに接続固定すると圧電スイッチ221k(図3)と圧電スイッチ22ak(図3)がONとなり、このONパターンをスイッチングデータ処理部22E(図3)が無線通信部22D(図3)を介して座標変換部10b(図1)に送るようになる。
また、作業者Pが接合部22Aを第1コネクタ部21b(図2)に押し当てて固定すると圧電スイッチ221kと圧電スイッチ22bkがONとなり、また、接合部22Aを第1コネクタ部21c(図2)に押し当てて固定すると圧電スイッチ221kと圧電スイッチ22ckがONとなり、このONパターンを位置同定出力部22Eが無線通信部22Dを介して座標変換部10bに送るようになる。このようにして位置の同定が自動的にできる。
また、対象作業に応じて第1コネクタ部21を選択して操作位置を変更することが可能となるので、作業性が格段に向上する。さらに、位置同定出力部22Eを設けることで、ダイレクト操作装置2の位置を自動的に同定することができ、力センサ22Bのセンサ座標系とロボット1のロボット座標系との間の同次変換行列を一意に決定することができる。
制御装置10は、ダイレクト操作装置2の操作信号を受信する無線受信部10aと、操作棒4のイネーブルスイッチ4C1と非常停止スイッチ4C2の出力信号を入力して制御するスイッチ信号監視部10fと、スイッチ信号監視部10fの出力に応じてサーボ動力の遮断を行うサーボ遮断回路10gと、ダイレクト操作装置2の取り付け位置同定出力部(図3の22E)の出力に応じて、力センサ22Bの取り付け方向を決定して座標変換を実行する座標変換部10bと、力センサ22Bの出力に応じて操作位置指令量を生成するインピーダンス制御部10cと、インピーダンス制御部10cの位置指令を入力して、位置速度制御処理を行う位置・速度制御部10dと、位置・速度制御部10dの出力に応じて、ロボット1の各関節部11、12、13にある各モータM11、M12、M13を電流制御するサーボアンプ部10eで構成される。

M:慣性係数
B:粘性係数
K:バネ係数
従って、慣性係数Mと粘性係数B、バネ係数Kを調整することで、ロボット1のダイレクト操作性能を調整することが出来る。
インピーダンス制御自体は公知技術であるため、これ以上の詳細な説明は割愛する。
操作棒4はFRPなどの絶縁材料でできた棒であり、先端に鉤型形状の引っ掛け部4Aがあり、反対側近傍に操作部4Cがあり、操作部4Cにはイネーブルスイッチ4C1と非常停止スイッチ4C2が設置されている。引っ掛け部4Aと操作部4Cの間の中間部分が取っ手4Bとなっている。
ダイレクト操作例としては、ダイレクト操作装置2のフック部22Lに作業者Pが把持した操作棒4の先端に鉤型形状の引っ掛け部4Aを引っ掛けてダイレクト操作を行う。ダイレクト操作装置2のフック部22Lの回転機構としては、力センサ22Bに円筒状ロッド22Fのベース部22Cが固定され、円筒状のロッド22Fの軸中心周りに相対的に回転するロッド回転部22Gがベース部に対してZ軸周りに回転自在とする。また、ダイレクト操作装置2のフック部22Lは回転部22GのX軸方向に設けられた穴に貫通し、X軸周りに回転自在とする。
作業者Pがダイレクト操作を行いたい場合、操作棒4の先端部4Aをダイレクト操作装置2のフック部22Lに引っ掛けて引き回し操作することで、回転部22Gが2自由度の回転機構を備えているため、操作棒4側に無理な力が作用することなく、操作棒4の作用力に倣う方向を維持したまま並進方向の操作力を正確に力センサ22Bに伝達することが可能となる。このように回転自在のフック機構であるため、絶縁を有した操作棒の着脱が容易で、かつ作業者の操作力を確実に伝達することが可能となる。また、絶縁性操作棒4により絶縁性が確実に確保されるため、極めて安全であり、またケーブルがないため耐久性と信頼性が増す。
また、作業者Pが把持する把持部4Bの近傍の操作部4Cにあるイネーブルスイッチ4C1のオンで動作開始し、オフで動作中止する。また、非常停止スイッチ4C2は非常のために設けられた停止スイッチである。
作業者Pは、図1においてロボット1の下方に位置してロボット1をダイレクト操作する。この場合、作業者Pは、配電作業で発生する6000V以上の電圧がある活線作業においては、絶縁性を確保するために、FRPなどの絶縁素材で構成された操作棒4を把持して、ロボット1のフック部22Lに、操作棒4の引っ掛け部4Aを掛けて、所望の操作方向に操作力を作用させる。
操作力は力センサ22Bで検出され、検出信号は、無線通信部22Dを介して、制御装置10の座標変換部10bに送られる。送られた検出信号は位置同定出力部22Eの出力結果に応じて、公知技術である同次変換行列により座標変換処理され、インピーダンス制御部10cに入力され、位置修正量が、位置速度制御部10dに入力される。
但しこの場合、イネーブルスイッチ4C1が押された時に、サーボ遮断回路10gが無効となり、インピーダンス制御部10cの出力が位置速度制御部10dに入力され、サーボアンプ10eへ電流指令が出力され、ロボット1が動作可能となる。作業者Pが異常を感じてイネーブルスイッチ4C1をオフすれば、サーボ遮断回路10gが有効となり、ハードブレーキがONされた状態となり、ロボット1は動作せずに、作業者Pの安全性を確保することができる。このように、絶縁性操作棒4の手元にイネーブルスイッチ4C1と非常停止スイッチ4C2を備えているため、非常に安全な操作手段となっている。
以上述べたように、ロボットのダイレクト操作装置において、2自由度の回転機構を備えているため、操作棒4側に無理な力が作用することなく、操作棒4の作用力に倣う方向を維持したまま並進方向の操作力を正確に力センサ22Bに伝達することが可能となり、実際の配電作業での適用に耐えうる安全性の高いダイレクト操作装置を提供することができる。
11、12、13 ロボット関節部
M11、M12、M13 モータ
1F ロボット側フランジ
10 制御装置
10a 無線受信部
10b 座標変換部
10c インピーダンス制御部
10d 位置・速度制御部
10e サーボアンプ部
10f スイッチ信号監視部
10g サーボ遮断回路
2 ダイレクト操作装置
2F ダイレクト操作装置側フランジ
20 基部
21、21a、21b、21c 第1コネクタ部(雄コネクタ)
21a1、21b1、21c1 矩形断面の差込ピン
21a2、21b2、21c2 円形断面の差込ピン
22 第2コネクタ部(雌コネクタ)
22A 接合部
22B 力センサ部
22C ベース部
22D 無線通信部
22E 取り付け位置同定出力部(スイッチングデータ処理部)
22F 円筒状ロッド
22G ロッド回転部
22L フック部
221 矩形断面の嵌着孔
22a2、22b2、22c2 円形断面の嵌着孔
221k、22ak、22bk、22ck 圧電スイッチ
22M LED(発光ダイオード)
3 ハンド
4 操作棒
4A 引っ掛け部
4B 取っ手
4C 操作部
4C1 イネーブルスイッチ
4C2 非常停止スイッチ
W 部品
P 作業者
Claims (7)
- 基部と、前記基部に固定された複数の第1コネクタ部(雄または雌)と、前記第1コネクタ部(雄または雌)のいずれか1個に接続固定される第2コネクタ部(雌または雄)とから構成されるダイレクト操作装置であって、前記第2コネクタ部が前記第1コネクタ部の接続を検知する圧電スイッチを内蔵した接合部と、前記接合部に設けられる力センサ部と、前記力センサ部を介して立設された少なくとも2自由度の回転機構を備えたフック部とを備え、前記力センサ部が前記フック部の引き回しによる力を検知して出力することを特徴とするダイレクト操作装置。
- 前記複数の第1コネクタ部の接続端子配置が互いに異なっており、かつ前記第2コネクタ部は前記複数の第1コネクタ部の前記各接続端子と接続可能な構造となっていることを特徴とする請求項1記載のダイレクト操作装置。
- 前記複数の第1コネクタ部は3個であり、それぞれ取付け軸の軸方向に直角な断面で90度、180度、270度の位置に設けられたことを特徴とする請求項2記載のダイレクト操作装置。
- 前記フック部は前記取付け軸先端の複数の方向からの取り付けができ、前記力センサ部は取り付け位置の同定をする信号の出力をすることを特徴とする請求項3記載のダイレクト操作装置。
- 前記フック部が前記力センサの正常状態を示すLEDを備えたことを特徴とする請求項4記載のダイレクト操作装置。
- 請求項1〜5記載のダイレクト操作装置を搭載した配電作業用ロボットであって、長尺状の棒の先端に引っ掛け部を、その把持部にイネーブルスイッチと非常停止スイッチを備えた絶縁性の操作棒を備え、前記引っ掛け部を前記フック部に引っかけて操作することを特徴とする配電作業用ロボット。
- 請求項4又は5記載のダイレクト操作装置を搭載した配電作業用ロボットであって、前記力センサのセンサ情報を基に制御する制御装置と、前記力センサのセンサ情報と前記取り付け位置同定信号を無線で送信する無線通信手段とバッテリとを備え、前記制御装置は操作位置指令量を生成するインピーダンス制御部と、前記インピーダンス制御部の位置指令を入力して位置・速度制御処理を行う位置・速度制御部と、前記位置・速度制御部の出力に応じて前記ロボットの各関節部のモータを制御するサーボアンプ部を備えたことを特徴とする配電作業用ロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007172670A JP4866799B2 (ja) | 2007-06-29 | 2007-06-29 | ダイレクト操作装置および配電作業用ロボット |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007172670A JP4866799B2 (ja) | 2007-06-29 | 2007-06-29 | ダイレクト操作装置および配電作業用ロボット |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009006465A true JP2009006465A (ja) | 2009-01-15 |
| JP2009006465A5 JP2009006465A5 (ja) | 2010-05-27 |
| JP4866799B2 JP4866799B2 (ja) | 2012-02-01 |
Family
ID=40322088
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007172670A Expired - Fee Related JP4866799B2 (ja) | 2007-06-29 | 2007-06-29 | ダイレクト操作装置および配電作業用ロボット |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4866799B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010207981A (ja) * | 2009-03-11 | 2010-09-24 | Panasonic Corp | マニピュレータ装置 |
| CN102642301A (zh) * | 2012-05-11 | 2012-08-22 | 河南机电高等专科学校 | 一种真空吸塑成型模 |
| JP2014117783A (ja) * | 2012-12-18 | 2014-06-30 | Kawasaki Heavy Ind Ltd | ロボットのハンドガイドシステムおよびハンドガイド装置 |
| JP2016103145A (ja) * | 2014-11-28 | 2016-06-02 | ファナック株式会社 | 可動部を直接手動で操作可能な数値制御工作機械 |
| CN108839023A (zh) * | 2018-07-03 | 2018-11-20 | 上海节卡机器人科技有限公司 | 拖动示教系统和方法 |
| DE102018219920A1 (de) | 2017-11-28 | 2019-05-29 | Fanuc Corporation | Roboterbetätigungsvorrichtung |
| US11034022B2 (en) | 2017-11-28 | 2021-06-15 | Fanuc Corporation | Robot teaching system, controller and hand guide unit |
| CN113370220A (zh) * | 2021-07-13 | 2021-09-10 | 崔成武 | 一种机械手臂控制系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01103279A (ja) * | 1987-10-16 | 1989-04-20 | Nissan Motor Co Ltd | 三次元計測ロボット |
| JPH0440506A (ja) * | 1990-06-06 | 1992-02-10 | Murata Mach Ltd | ロボットの教示装置 |
| JPH05324020A (ja) * | 1992-05-19 | 1993-12-07 | Nissan Motor Co Ltd | ロボット制御装置 |
| JPH0976183A (ja) * | 1995-09-14 | 1997-03-25 | Yaskawa Electric Corp | ロボットのダイレクトティーチング装置 |
| JPH09150382A (ja) * | 1995-11-29 | 1997-06-10 | Yaskawa Electric Corp | ロボットの直接教示装置 |
| JPH11277470A (ja) * | 1998-03-25 | 1999-10-12 | Sumitomo Heavy Ind Ltd | ティーチング装置 |
-
2007
- 2007-06-29 JP JP2007172670A patent/JP4866799B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01103279A (ja) * | 1987-10-16 | 1989-04-20 | Nissan Motor Co Ltd | 三次元計測ロボット |
| JPH0440506A (ja) * | 1990-06-06 | 1992-02-10 | Murata Mach Ltd | ロボットの教示装置 |
| JPH05324020A (ja) * | 1992-05-19 | 1993-12-07 | Nissan Motor Co Ltd | ロボット制御装置 |
| JPH0976183A (ja) * | 1995-09-14 | 1997-03-25 | Yaskawa Electric Corp | ロボットのダイレクトティーチング装置 |
| JPH09150382A (ja) * | 1995-11-29 | 1997-06-10 | Yaskawa Electric Corp | ロボットの直接教示装置 |
| JPH11277470A (ja) * | 1998-03-25 | 1999-10-12 | Sumitomo Heavy Ind Ltd | ティーチング装置 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010207981A (ja) * | 2009-03-11 | 2010-09-24 | Panasonic Corp | マニピュレータ装置 |
| CN102642301A (zh) * | 2012-05-11 | 2012-08-22 | 河南机电高等专科学校 | 一种真空吸塑成型模 |
| JP2014117783A (ja) * | 2012-12-18 | 2014-06-30 | Kawasaki Heavy Ind Ltd | ロボットのハンドガイドシステムおよびハンドガイド装置 |
| CN105643339B (zh) * | 2014-11-28 | 2019-04-30 | 发那科株式会社 | 能够直接以手动操作可动部的数控机床 |
| JP2016103145A (ja) * | 2014-11-28 | 2016-06-02 | ファナック株式会社 | 可動部を直接手動で操作可能な数値制御工作機械 |
| CN105643339A (zh) * | 2014-11-28 | 2016-06-08 | 发那科株式会社 | 能够直接以手动操作可动部的数控机床 |
| US10088823B2 (en) | 2014-11-28 | 2018-10-02 | Fanuc Corporation | Numerically controlled machine tool for direct and manual operation of movable part |
| JP2019093539A (ja) * | 2017-11-28 | 2019-06-20 | ファナック株式会社 | ロボット操作装置 |
| DE102018219920A1 (de) | 2017-11-28 | 2019-05-29 | Fanuc Corporation | Roboterbetätigungsvorrichtung |
| US10807247B2 (en) | 2017-11-28 | 2020-10-20 | Fanuc Corporation | Robot operation apparatus |
| DE102018219920B4 (de) * | 2017-11-28 | 2021-05-12 | Fanuc Corporation | Roboterbetätigungsvorrichtung |
| US11034022B2 (en) | 2017-11-28 | 2021-06-15 | Fanuc Corporation | Robot teaching system, controller and hand guide unit |
| CN108839023A (zh) * | 2018-07-03 | 2018-11-20 | 上海节卡机器人科技有限公司 | 拖动示教系统和方法 |
| CN108839023B (zh) * | 2018-07-03 | 2021-12-07 | 上海节卡机器人科技有限公司 | 拖动示教系统和方法 |
| CN113370220A (zh) * | 2021-07-13 | 2021-09-10 | 崔成武 | 一种机械手臂控制系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4866799B2 (ja) | 2012-02-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4866799B2 (ja) | ダイレクト操作装置および配電作業用ロボット | |
| US11071599B2 (en) | Surgical instrument engagement detection | |
| JP6581056B2 (ja) | ロボット制御部と通信する教示操作盤を備えたロボットシステム | |
| KR101527176B1 (ko) | 수술 로봇 장치 및 수술 로봇 장치의 제어 방법 | |
| KR102094439B1 (ko) | 산업용 원격조작 로봇시스템 | |
| JP6262754B2 (ja) | フラックス伝送コネクタ及びシステム、フラックス除去、並びにフラックス供給路をマッピングするためのシステム及び方法 | |
| JP5204214B2 (ja) | 可動機械制御システム | |
| CN111714207A (zh) | 手术机器人的控制系统及手术机器人 | |
| JP2021118844A (ja) | 電気手術接続ユニット | |
| US11007655B2 (en) | Manipulation unit and robot with manipulated switch | |
| JP6853675B2 (ja) | ロボットシステムとロボットの制御装置 | |
| JP5394136B2 (ja) | 無線教示操作盤およびロボット制御システム | |
| CN115551433A (zh) | 机器人系统以及退出方法 | |
| JP2017056507A (ja) | パラレルメカニズム | |
| JP5545380B1 (ja) | ロボットシステム | |
| JP2009066678A (ja) | ロボットハンドおよびロボットハンドシステム | |
| JP7202767B2 (ja) | 操作可能制御システム及びそれを備えたロボット支援手術装置 | |
| US10579034B2 (en) | Control system for electrically controlled systems | |
| US20210186306A1 (en) | Manipulator system, and control method of manipulator system | |
| JP2017087366A (ja) | ロボット、制御装置およびロボットシステム | |
| US20210397165A1 (en) | Fully automated assembly and contacting of electrical components | |
| US20210162603A1 (en) | Manipulation device and manipulation system | |
| JP4226996B2 (ja) | 誤接続検出システム | |
| US9527210B2 (en) | Robot apparatus | |
| JP6829292B2 (ja) | 制御装置、制御システム、制御方法及び制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100413 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100413 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111018 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111114 |
|
| FPAY | Renewal fee payment (prs date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141118 Year of fee payment: 3 |
|
| R150 | Certificate of patent (=grant) or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |