JP2005296510A - 監視カメラを備えた自走式掃除機 - Google Patents
監視カメラを備えた自走式掃除機 Download PDFInfo
- Publication number
- JP2005296510A JP2005296510A JP2004120605A JP2004120605A JP2005296510A JP 2005296510 A JP2005296510 A JP 2005296510A JP 2004120605 A JP2004120605 A JP 2004120605A JP 2004120605 A JP2004120605 A JP 2004120605A JP 2005296510 A JP2005296510 A JP 2005296510A
- Authority
- JP
- Japan
- Prior art keywords
- self
- security
- suspicious person
- human body
- stepwise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images


















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING SYSTEMS, e.g. PERSONAL CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B13/00—Burglar, theft or intruder alarms
- G08B13/18—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength
- G08B13/189—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems
- G08B13/194—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems
- G08B13/196—Actuation by interference with heat, light, or radiation of shorter wavelength; Actuation by intruding sources of heat, light, or radiation of shorter wavelength using passive radiation detection systems using image scanning and comparing systems using television cameras
- G08B13/19697—Arrangements wherein non-video detectors generate an alarm themselves
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0272—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising means for registering the travel distance, e.g. revolutions of wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0242—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using non-visible light signals, e.g. IR or UV signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Multimedia (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Electric Vacuum Cleaner (AREA)
- Burglar Alarm Systems (AREA)
- Alarm Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
【課題】 不審者か否かの判断は正確ではなく、不審者の可能性が少しでもあれば何らかの警報を発するようにすると誤報が多くなるし、不審者の可能性が上がらないと警報を発しないようにすると本当に不審者が侵入したときの対処が遅れるという課題があった。
【解決手段】 本自走式掃除機では、人体センサ21によって不審者の可能性がある人体を検知したときに、照明の点灯(ステップS482)、照明の点滅(ステップS488)、大音量の発生(ステップS494)、退去メッセージの発生(ステップS500)、警察への通報メッセージの発生(ステップS506)という段階的警備を実施可能であり、各段階において室内の様子を撮影して外出中の家人に送信し、家人からの指示に応じて段階的実行の可否を判断するようにしている。
【選択図】 図17
【解決手段】 本自走式掃除機では、人体センサ21によって不審者の可能性がある人体を検知したときに、照明の点灯(ステップS482)、照明の点滅(ステップS488)、大音量の発生(ステップS494)、退去メッセージの発生(ステップS500)、警察への通報メッセージの発生(ステップS506)という段階的警備を実施可能であり、各段階において室内の様子を撮影して外出中の家人に送信し、家人からの指示に応じて段階的実行の可否を判断するようにしている。
【選択図】 図17
Description
本発明は、掃除機構を備えた本体と、操舵及び駆動が可能な駆動機構とを備えるとともに、監視カメラを備えた自走式掃除機に関するものである。
従来、自律して走行可能なロボットが警備も行なうものとして特許文献1〜特許文献3に開示されたものが知られている。ここで、特許文献1は、警備情報を取得したら、無線で送信する自走式の清掃ロボットを開示しており、特許文献2は、人体検知センサが侵入者を検知すると、番犬の吠え立て音を発するロボットを開示しており、特許文献3は、訪問者を識別できないとロックを解除しない自律行動ロボットを開示している。
特開2000−342498号公報
特開2002−254374号公報
特開2003−281653号公報
上述した従来の自走式ロボットにおいては、警備も行なうことが可能であるものの、不審者か否かの判断は正確ではない。このため、不審者の可能性が少しでもあれば何らかの警報を発するようにすると誤報が多くなるし、不審者の可能性が上がらないと警報を発しないようにすると本当に不審者が侵入したときの対処が遅れるという課題があった。
本発明は、上記課題に鑑みてなされたもので、信頼性の高い警備を実現する自走式掃除機を提供することを目的とする。
本発明は、上記課題に鑑みてなされたもので、掃除機構を備えた本体と、操舵及び駆動が可能な駆動機構とを備える自走式掃除機であって、撮影指示を受けて撮影を行い、撮像イメージデータを出力可能なカメラ素子と、所定のデータを無線で外部に送信し、外部より所定の指示を受信可能な無線送受信手段と、室内の電灯を含む室内の家電機器を制御するための制御信号送信手段と、不審者の情報を取得する不審者情報取得手段と、予め定めた複数の段階的警備指示に基づき、上記不審者情報取得手段にて不審者の情報を取得すると、上記制御信号送信手段によって室内の家電機器の制御と、上記カメラ素子による撮影と、上記無線送受信手段による外部との無線交信を実行し、外部からの指示に対応して上記段階的警備指示に従って順次段階を上げて警備を実行する段階的警備実行制御手段とを具備する構成としてある。
上記のように構成した本発明においては、不審者情報取得手段により不審者の情報を取得することが可能となっており、この不審者情報取得手段にて不審者の情報を取得すると、予め定めた複数の段階的警備指示に基づき、段階的警備実行制御手段が外部からの指示に対応して順次段階を上げて警備を実行する。すなわち、段階的警備指示に従って上記段階的警備実行制御手段は、上記制御信号送信手段によって室内の家電機器の制御と、上記カメラ素子による撮影と、上記無線送受信手段による外部との無線交信を実行する。
このように、予め複数の段階的警備を定めてあり、外部からの指示を仰ぎながら順次段階を上げていくようにしており、各段階で外部からの指示を仰ぐことにより、早期に連絡はしつつも、いきなり高度な警備を実施してしまうことがなくなり、全体としての信頼性を向上させることができる。
不審者の情報は、扉などに備えた防犯検知器から得ても良いし、外部のインターホンから得るなど、各種のものを利用可能であり、その一例として、請求項3にかかる発明では、上記不審者情報取得手段は、本体の周囲における所定距離の範囲内での人体の有無を検知する人体センサを有し、上記段階的警備実行制御手段は、上記人体センサにより人体が至近距離にあることを検知すると、予め指定しておいた走行経路を走行するように上記駆動機構を制御して退避行動を実現する構成としてある。
段階的な警備を実現することで、例えば不明確な情報に基づいていきなり警備会社などに通報することは防止できるものの、不審者に見つけられて破壊されかねない。上記のように構成した場合、上記不審者情報取得手段における人体センサは、本体の周囲における所定距離の範囲内での人体の有無を検知することが可能であり、上記人体センサにより人体が至近距離にあることを検知すると、上記段階的警備実行制御手段は、予め指定しておいた走行経路を走行するように上記駆動機構を制御して退避行動を実現する。
従って、至近距離に不審者がいるような状況であれば、退避行動をして捕捉されたり、破壊されてしまう最悪の状態を未然に防ぐことができる。
また、仮に破壊行動を受けたような場合にも予め指定したとおりの段階的警備をしていると間に合わなくなる可能性もあり、このため、請求項4にかかる発明では、上記不審者情報取得手段は、加速度センサを有し、上記段階的警備実行制御手段は、不審者の情報を取得したときに上記加速度センサによりショックを表す大きな加速度を検知したときに段階の繰り上げを早める構成としてある。
また、仮に破壊行動を受けたような場合にも予め指定したとおりの段階的警備をしていると間に合わなくなる可能性もあり、このため、請求項4にかかる発明では、上記不審者情報取得手段は、加速度センサを有し、上記段階的警備実行制御手段は、不審者の情報を取得したときに上記加速度センサによりショックを表す大きな加速度を検知したときに段階の繰り上げを早める構成としてある。
上記のように構成した場合、不審者の情報を取得した段階で、上記加速度センサによりショックを表す大きな加速度を検知したときは、不審者からの攻撃を受けた可能性があると判断できるから、上記段階的警備実行制御手段は、警備の段階の繰り上げを早める。これにより、最終的な警備段階の実行が遅れるということがなくなる。
家電機器の制御は各種の手法を採用可能であり、その一例として、請求項5にかかる発明では、上記制御信号送信手段は、上記家電機器を遠隔操作する赤外線信号を送信する赤外線信号送信手段を有し、上記段階的警備実行制御手段は、上記制御信号送信手段により上記家電機器を同赤外線信号により制御する構成としてある。
上記のように構成した場合、上記段階的警備実行制御手段は、赤外線信号送信手段により上記家電機器を遠隔操作する赤外線信号を送信するようにしている。家電機器は赤外線信号によって遠隔操作されることが多く、汎用的に利用できるし、赤外線信号送信手段に加えて赤外線信号受信手段をユニット化して装着するようにすれば、赤外線による情報通信が可能であり、利便性も向上する。
外部からの指示を仰ぐ好適な一例として、請求項6にかかる発明では、上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信する構成としてある。
上記のように構成した場合、まず、室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信するので、外部からは室内の様子が分かりやすく、的確な指示を与えることが可能となる。
段階的警備の一例として、請求項7にかかる発明では、上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の照明を点滅させて不審者に対する威嚇を行う構成としてある。
上記のように構成した場合、室内の照明を点滅させるようにしており、不審者にとっては無人と思っているところに室内の照明が点滅することで、誰かがいるかのごとくの錯覚を招き、有意義な威嚇を与えることができる。
また、段階的警備の他の一例として、請求項8にかかる発明では、上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の音響機器から音声を送出させて不審者に対する威嚇を行う構成としてある。
上記のように構成した場合、室内の音響機器から音声を送出させるようにしており、不審者にとっては無人と思っているところに室内の音響機器から音声が聞こえれば誰かがいるかのごとくの錯覚を招き、有意義な威嚇を与えることができる。
無線で外部に通信する好適な一例として、請求項9にかかる発明では、上記無線送信手段は、無線LANモジュールを有し、無線LANで有線LANに接続し、同有線LANとインターネットを介して外部と通信を行う構成としてある。
上記のように構成した場合、有線LANが存在することを前提として、本体に備えられた無線LANモジュールを介して同有線LANに備えられたアクセスポイントに接続し、LANを介して所定の通信相手に情報や撮像イメージデータを送信することができる。従って、家人はインターネットにアクセスしうる状況であれば、情報を受信したり、指示を送信することができる。
上記のように構成した場合、室内の照明を点滅させるようにしており、不審者にとっては無人と思っているところに室内の照明が点滅することで、誰かがいるかのごとくの錯覚を招き、有意義な威嚇を与えることができる。
また、段階的警備の他の一例として、請求項8にかかる発明では、上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の音響機器から音声を送出させて不審者に対する威嚇を行う構成としてある。
上記のように構成した場合、室内の音響機器から音声を送出させるようにしており、不審者にとっては無人と思っているところに室内の音響機器から音声が聞こえれば誰かがいるかのごとくの錯覚を招き、有意義な威嚇を与えることができる。
無線で外部に通信する好適な一例として、請求項9にかかる発明では、上記無線送信手段は、無線LANモジュールを有し、無線LANで有線LANに接続し、同有線LANとインターネットを介して外部と通信を行う構成としてある。
上記のように構成した場合、有線LANが存在することを前提として、本体に備えられた無線LANモジュールを介して同有線LANに備えられたアクセスポイントに接続し、LANを介して所定の通信相手に情報や撮像イメージデータを送信することができる。従って、家人はインターネットにアクセスしうる状況であれば、情報を受信したり、指示を送信することができる。
近年においては、携帯電話を介してインターネットの電子メールの送受信が極めて容易に実現でき、このような携帯電話への情報の送受信を行える無線LAN環境によって確実に情報の送受信が可能となる。
本体に備えられる掃除機構については、吸引タイプによる掃除機構を採用しても良いし、ブラシにより掻き込むタイプの掃除機構を採用しても良いし、両者を組み合わせて採用しても良い。また、操舵及び駆動が可能な駆動機構についても、各種の構成が可能である。駆動機構は、車輪のみならず、無端ベルトを駆動する構成で実現しても良い。むろん、これ以外にも、4輪、6輪など、各種の構成で駆動機構を実現可能である。
本体に備えられる掃除機構については、吸引タイプによる掃除機構を採用しても良いし、ブラシにより掻き込むタイプの掃除機構を採用しても良いし、両者を組み合わせて採用しても良い。また、操舵及び駆動が可能な駆動機構についても、各種の構成が可能である。駆動機構は、車輪のみならず、無端ベルトを駆動する構成で実現しても良い。むろん、これ以外にも、4輪、6輪など、各種の構成で駆動機構を実現可能である。
そして、以上のような構成を踏まえたより具体的な構成の一例として、請求項1にかかる発明は、掃除機構を備えた本体と、同本体における左右に配置されて個別に回転を制御可能で操舵と駆動を実現する駆動輪を有する駆動機構とを備える自走式掃除機であって、上記本体には、撮影指示を受けて撮影を行い、撮像イメージデータを出力可能なカメラ素子と、側面に複数備えられて赤外線の受光光量の変化に基づいて赤外線発光動体を検知する人体センサと、無線LANモジュールを有し、無線LANで有線LANに接続し、同有線LANとインターネットを介して外部と通信を行い、所定のデータを無線で外部に送信し、外部より所定の指示を受信可能な無線送受信手段と、室内の電灯を含む室内の家電機器を遠隔操作するための赤外線信号を送信可能な赤外線制御信号送信手段と、上記不審者情報取得手段にて不審者の情報を取得すると、上記赤外線信号送信手段からの赤外線信号により室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信するとともに、予め定めた複数の段階的警備指示に基づき、上記制御信号送信手段によって室内の家電機器の制御を実行するとともに、上記無線送受信手段による外部との無線交信に基づく外部からの指示に対応し、上記段階的警備指示に従って順次段階を上げて警備を実行する段階的警備実行制御手段とを具備する構成としてある。
上記のような構成とすることにより、本体の側面に赤外線の受光光量の変化に基づいて赤外線発光動体を検知する人体センサが複数備えられており、室内の電灯を含む室内の家電機器を遠隔操作するための赤外線信号を送信可能な赤外線制御信号送信手段と、この人体センサにて不審者の情報を取得すると、段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信する。また、上記段階的警備実行制御手段は、予め定めた複数の段階的警備指示に基づき、上記制御信号送信手段によって室内の家電機器の制御を実行するとともに、上記無線送受信手段の無線LANモジュールによって、無線LANと有線LANとインターネットを介して外部と通信を行い、外部からの指示に対応し、上記段階的警備指示に従って順次段階を上げて警備を実行する。
このようにして外部とインタラクティブに連絡を行い、段階的に警備を上げることで、全体の信頼性を向上させることが可能となるという効果がある。
図1は、本発明にかかる自走式掃除機の概略構成をブロック図により示している。
同図に示すように、各ユニットを制御する制御ユニット10と、周囲に人間がいるか否かを検知する人体感知ユニット20と、周囲の障害物を検知するための障害物監視ユニット30と、移動を実現する走行系ユニット40と、掃除を行うためのクリーナ系ユニット50と、所定範囲を撮影するカメラ系ユニット60と、無線でLANに接続するための無線LANユニット70と、オプションユニット80とから構成されている。なお、本体BDは薄型の略円筒形状をなしている。
同図に示すように、各ユニットを制御する制御ユニット10と、周囲に人間がいるか否かを検知する人体感知ユニット20と、周囲の障害物を検知するための障害物監視ユニット30と、移動を実現する走行系ユニット40と、掃除を行うためのクリーナ系ユニット50と、所定範囲を撮影するカメラ系ユニット60と、無線でLANに接続するための無線LANユニット70と、オプションユニット80とから構成されている。なお、本体BDは薄型の略円筒形状をなしている。
図2は、各ユニットを具体的に実現する電気系の構成をブロック図により示している。
制御ユニット10として、CPU11と、ROM13と、RAM12がバス14を介して接続されている。CPU11は、ROM13に記録されている制御用プログラムおよび各種パラメータテーブルに従い、RAM12をワークエリアとして使用して各種の制御を実行する。上記制御用プログラムの内容については後述する。
制御ユニット10として、CPU11と、ROM13と、RAM12がバス14を介して接続されている。CPU11は、ROM13に記録されている制御用プログラムおよび各種パラメータテーブルに従い、RAM12をワークエリアとして使用して各種の制御を実行する。上記制御用プログラムの内容については後述する。
また、バス14には操作パネルユニット15が備えられ、同操作パネルユニット15には、各種の操作用スイッチ15aと、液晶表示パネル15bと、表示用LED15cが備えられている。液晶表示パネルは多階調表示が可能なモノクロ液晶パネルを使用しているが、カラー液晶パネルなどを使用することも可能である。
本自走式掃除機はバッテリー17を有しており、CPU11はバッテリ監視回路16を介してバッテリー17の残量をモニター可能となっている。なお、同バッテリー17は誘導コイル18aを介して非接触で供給される電力を用いて充電する充電回路18を備えている。バッテリー監視回路16は主にバッテリー17の電圧を監視して残量を検知する。
人体感知ユニット20として、四つの人体センサ21(21fr,21rr,21fl,21rl)が前方左右斜め方向と後方左右斜め方向に対面させて備えられている。各人体センサ21は赤外線の受光センサを備えるとともに受光した赤外線の光量の変化に基づいて人体の有無を検知するものであり、変化する赤外線照射物体を検知したとき出力用のステータスを変化させるため、CPU11は上記バス14を介して同人体センサ21の検知を取得することが可能となっている。すなわち、CPU11は所定時間毎に各人体センサ21fr,21rr,21fl,21rlのステータスを取得しにいき、取得したステータスが変化していれば、同人体センサ21fr,21rr,21fl,21rlの対向方向に人体の存在を検知することが可能となる。
ここでは赤外線の光量変化に基づくセンサによって人体センサを構成しているが、人体センサはこれに限られるものではない。例えば、CPUの処理量が上がればカラー画像を撮影し、人体に特徴的な肌色の領域を探し、同領域の大きさ、変化に基づいて人体を検知するという構成を実現することもできる。
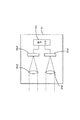
障害物監視ユニット30は、オートフォーカス(以下、AFと呼ぶ。)用測距センサとしてのAF用パッシブセンサ31(31R,31FR,31FM,31FL,31L,31CL))とその通信用インターフェイスであるAFセンサ通信I/O32と、照明用LED33と、各LEDに駆動電流を供給するLEDドライバ34とから構成されている。まず、AF用パッシブセンサ31の構成について説明する。図3はAF用パッシブセンサ31の概略構成を示している。二軸のほぼ平行な光学系31a1,31a2と、同光学系31a1,31a2の結像位置にほぼそれぞれ配設されたCCDラインセンサ31b1,31b2と、各CCDラインセンサ31b1,31b2の撮像イメージデータを外部に出力するための出力I/O31cとを備えている。
CCDラインセンサ31b1,31b2は160〜170画素のCCDセンサを有しており、各画素ごとに光量を表す8ビットのデータを出力可能となっている。光学系が二軸であるので、結像イメージには距離に応じたずれが生じており、それぞれのCCDラインセンサ31b1,31b2が出力するデータのずれに基づいて距離を計測できる。例えば、近距離になるほど結像イメージのずれが大きく、遠距離になるほど結像イメージのずれはなくなっていく。従って、一方の出力データにおける4〜5画素毎のデータ列を画報の出力データ中でスキャンし、元のデータ列のアドレスと発見されたデータ列のアドレスとの相違を求め、相違量で予め用意しておいた相違量−距離変換テーブルを参照し、実際の距離を求めることになる。
AF用パッシブセンサ31R,31FR,31FM,31FL,31L,31CLのうち、AF用パッシブセンサ31FR,31FM,31FLは正面の障害を検知するために利用され、AF用パッシブセンサ31R,31Lは前方左右直前の障害を検知するために利用され、AF用パッシブセンサ31CLは前方天井までの距離を検知するために利用されている。
図4は正面と前方左右直前の障害をAF用パッシブセンサ31で検知する際の原理を示している。これらのAF用パッシブセンサ31は周囲の床面に対して斜めに向けて配置されている。対向方向に障害物が無い場合、AF用パッシブセンサ31による測距距離はほぼ全撮像範囲においてL1となる。しかし、図面で一点鎖線で示すように段差がある場合、その測距距離はL2となる。測距距離が伸びたら下がる段差があると判断できる。また、二点鎖線で示すように上がる段差があれば測距距離はL3となる。障害物があるときも上がる段差と同様に測距距離は同障害物までの距離として計測され、床面よりも短くなる。
本実施形態においては、AF用パッシブセンサ31を前方の床面に斜めに配向した場合、その撮像範囲は約10cmとなった。本自走式クリーナの幅が30cmであったので、三つのAF用パッシブセンサ31FR,31FM,31FLについては撮像範囲が重ならないように僅かに角度を変えて配置している。これにより、三つのAF用パッシブセンサ31FR,31FM,31FLにより前方方向の30cmの範囲での障害物と段差を検知できるようになっている。むろん、検知幅はセンサの仕様や取付位置などに応じて変化し、実際に必要となる幅に応じた数のセンサを利用すればよい。
一方、前方左右直前の障害を検知するAF用パッシブセンサ31R,31Lについては撮像範囲を垂直方向を基準として床面に対して斜めに配置している。また、AF用パッシブセンサ31Rを本体左方に取り付けつつ本体中央を横切って右方直前位置から本体幅を超えた右方の範囲を撮像するように対向させてあり、AF用パッシブセンサ31Lを本体右方に取り付けつつ本体中央を横切って左方直前位置から本体幅を超えた左方の範囲を撮像するように対向させてある。
クロスさせないで左右の直前位置を撮影するようにすると、センサは急角度で床面に対面させなければならず、このようにすると撮像範囲が極めて狭くなってしまうので、複数のセンサが必要となる。このため、敢えてクロスさせる配置とし、撮像範囲を広げて少ない数のセンサで必要範囲をカバーできるようにしている。また、撮像範囲を垂直方向を基準として斜めに配置するのは、CCDラインセンサの並び方向が垂直方向に向くことを意味しており、図5に示すように撮像できる幅がW1となる。ここで、撮像範囲の右側で床面までの距離L4は短く、左側で距離L5が長くなっている。本体BDの側面の境界ラインが図面上の波線位置Bであると、境界ラインまでの撮像範囲は段差の検知などに利用され、境界ラインを超える撮像範囲は壁面の有無を検知するために利用される。
前方天井までの距離を検知するAF用パッシブセンサ31CLは天井に対面している。通常はAF用パッシブセンサ31CLが検知する床面から天井までの距離が一定であるが、壁面に近づいてくると撮像範囲が天井ではなく壁面となるので、測距距離が短くなってくる。従って、前方壁面の存在をより正確に検知できる
図6は各AF用パッシブセンサ31R,31FR,31FM,31FL,31L,31CLの本体BDへの取り付け位置を示すとともに、それぞれの床面での撮像範囲を括弧付きの符号で対応させて示している。なお、天井については撮像範囲は省略している。
図6は各AF用パッシブセンサ31R,31FR,31FM,31FL,31L,31CLの本体BDへの取り付け位置を示すとともに、それぞれの床面での撮像範囲を括弧付きの符号で対応させて示している。なお、天井については撮像範囲は省略している。
AF用パッシブセンサ31R,31FR,31FM,31FL,31Lの撮像を証明するように白色LEDからなる右照明用LED33Rと、左照明用LED33Lと、前照明用LED33Mを備えており、LEDドライバ34はCPU11からの制御指示に基づいて駆動電流を供給して照明できるようになっている。これにより、夜間であったり、テーブルの下などの暗い場所でもAF用パッシブセンサ31から有効な撮像イメージのデータを得ることができるようになる。
走行系ユニット40は、モータドライバ41R,41Lと、駆動輪モータ42R,42Lと、この駆動輪モータ42R,42Lにて駆動される図示しないギアユニットと駆動輪を備えている。駆動輪は本体BDの左右に一輪ずつ配置されており、この他に駆動源を持たない自由転動輪が本体の前方側中央下面に取り付けられている。駆動輪モータ42R,42Lは回転方向と回転角度をモータドライバ41R,41Lによって詳細に駆動可能であり、各モータドライバ41R,41LはCPU11からの制御指示に応じて対応する駆動信号を出力する。また、駆動輪モータ42R,42Lと一体的に取り付けられているロータリーエンコーダの出力から現実の駆動輪の回転方向と回転角度が正確に検知できるようになっている。なお、ロータリーエンコーダは駆動輪と直結させず、駆動輪の近傍に自由回転可能な従動輪を取り付け、同従動輪の回転量をフィードバックさせることによって駆動輪にスリップが生じているような場合でも現実の回転量を検知できるようにしても良い。走行系ユニット40には、この他に地磁気センサ43が備えられており、地磁気に照らし合わせて走行方向を判断できるようになっている。また、加速度センサ44はXYZ三軸方向における加速度を検知し、検知結果を出力する。
ギアユニットや駆動輪は各種のものを採用可能であり、円形のゴム製タイヤを駆動させるようにしたり、無端ベルトを駆動させるようにして実現しても良い。
本自走式掃除機における掃除機構は、前方両サイドに配置されて本体BDの進行方向における両側寄りのゴミなどを当該本体BDにおける中央付近にかき寄せるサイドブラシと、本体の中央付近にかき寄せられたゴミをすくい上げるメインブラシと、同メインブラシによりすく上げられるゴミを吸引してダストボックス内に収容する吸引ファンとから構成されている。クリーナ系ユニット50は、各ブラシを駆動するサイドブラシモータ51R,51Lとメインブラシモータ52、それぞれのモータに駆動電力を供給するモータドライバ53R,53L,54と、吸引ファンを駆動する吸引モータ55と、同吸引モータに駆動電力を供給するモータドライバ56とから構成されている。サイドブラシやメインブラシを使用した掃除は床面の状況やバッテリーの状況やユーザの指示などに応じてCPU11が適宜判断して制御するようにしている。
本自走式掃除機における掃除機構は、前方両サイドに配置されて本体BDの進行方向における両側寄りのゴミなどを当該本体BDにおける中央付近にかき寄せるサイドブラシと、本体の中央付近にかき寄せられたゴミをすくい上げるメインブラシと、同メインブラシによりすく上げられるゴミを吸引してダストボックス内に収容する吸引ファンとから構成されている。クリーナ系ユニット50は、各ブラシを駆動するサイドブラシモータ51R,51Lとメインブラシモータ52、それぞれのモータに駆動電力を供給するモータドライバ53R,53L,54と、吸引ファンを駆動する吸引モータ55と、同吸引モータに駆動電力を供給するモータドライバ56とから構成されている。サイドブラシやメインブラシを使用した掃除は床面の状況やバッテリーの状況やユーザの指示などに応じてCPU11が適宜判断して制御するようにしている。
カメラ系ユニット60は、それぞれ視野角の異なる二つのCMOSカメラ61,62を備えており、本体BDの正面方向であってそれぞれことなる仰角にセットされている。また、各カメラ61,62への撮像を指示するとともに撮像イメージを出力するためのカメラ通信I/O63も備えられている。さらに、カメラ61,62の撮像方向に対面させて15コの白色LEDからなるカメラ用照明LED64と、同LEDに照明用駆動電力を供給するためのLEDドライバ65を備えている。
図10は、カメラ系ユニット60の外観を斜視図により示している。
カメラ系ユニット60はオプションとして取り付け可能となっており、本体BDには金属板材を屈曲加工した取り付けベース66が備えられている。上記CMOSカメラ61,62やカメラ用照明LED64などを載置した基板67が提供され、同取り付けベース66にネジ止め固定するようになっている。取り付けベース66は基部66aと、当該基部66aを水平方向から約45度傾斜させて保持するために上記基部66aの下方縁部の両側端から後方に延設された二つの脚部66bと、二つの脚部66bの間で基部66aに対してほぼ垂直に屈曲されて上記基板67の下方縁部を支持する支持用凸縁部66cと、基部66aの上方縁部の両端から上方に帯板状に延設されるとともに二回90度屈曲されることによって先端側を基部66aと平行に対面させ、かつ、雌ねじ穴を形成された固定片66dを備えている。
カメラ系ユニット60はオプションとして取り付け可能となっており、本体BDには金属板材を屈曲加工した取り付けベース66が備えられている。上記CMOSカメラ61,62やカメラ用照明LED64などを載置した基板67が提供され、同取り付けベース66にネジ止め固定するようになっている。取り付けベース66は基部66aと、当該基部66aを水平方向から約45度傾斜させて保持するために上記基部66aの下方縁部の両側端から後方に延設された二つの脚部66bと、二つの脚部66bの間で基部66aに対してほぼ垂直に屈曲されて上記基板67の下方縁部を支持する支持用凸縁部66cと、基部66aの上方縁部の両端から上方に帯板状に延設されるとともに二回90度屈曲されることによって先端側を基部66aと平行に対面させ、かつ、雌ねじ穴を形成された固定片66dを備えている。
図11に示すように、先に基板67の上端を上記固定片66dと基部66aとの間に入り込ませ、奥まで入った時点で下端を支持用凸縁部66cの上に載せるように押し込み、最後に雌ねじ穴66d1に雄ねじ66d2を螺合させて基板67がずれないように固定する。なお、基板67の上端両側部と、下端中央部には上記固定片66dと支持用凸縁部66cに合わせた切り込み67a,67bを形成してあり、正確な位置決めが可能となっている。
CMOSカメラ61は、視野角110度の広角(レンズ)カメラであり、基板67に対して撮影方向が垂直となるように固定されている。視野角が110度であり、基板67自体が45度傾斜した取り付けベース66に取り付けられるので、撮影範囲は水平面より下方に10度の範囲から110度の範囲となる。従って、この意味で撮影範囲の一部には床面を含むことになる。
CMOSカメラ62は、視野角58度の標準(レンズ)カメラであり、基板67に対して15度傾斜して取り付けるためのくさび形アダプタ62aを敷いて固定されている。視野角が58度であるから、撮影範囲は水平方向に対して1度〜57度の範囲であり、被写体から2m離れたところで撮影すると、0.034m〜3.078mの範囲となる。この場合は被写体を撮影できる可能性が高い。これに対して被写体が近接して1m離れたところで撮影すると、0.017m〜1.539mの範囲となり、姿勢によっては侵入者の顔が撮影されないこともある。
しかし、CMOSカメラ61の撮影範囲は水平面より下方に10度の範囲から110度の範囲であるから、撮影範囲としては十分カバーされているし、床面から1m+(カメラの高さ)の高さを中心として上方天井までが撮影されているので、侵入者の顔が撮影されている可能性は非常に高い。
また、CMOSカメラ61,62は後述するように本体BDのポジショニング後、即座に同時に撮影されているので、カメラのポジショニングやフォーカシングの時間が不要であり、シャッターチャンスを逃さない。
無線LANユニット70は、無線LANモジュール71を有しており、CPU11は所定のプロトコルに従って外部LANと無線によって接続可能となっている。無線LANモジュール71は、図示しないアクセスポイントの存在を前提として、同アクセスポイントはルータなどを介して外部の広域ネットワーク(例えばインターネット)に接続可能な環境となっていることとする。従って、インターネットを介した通常のメールの送受信やWEBサイトの閲覧といったことが可能である。なお、無線LANモジュール71は、規格化されたカードスロットと、同スロットに接続される規格化された無線LANカードなどから構成されている。むろん、カードスロットは他の規格化されたカードを接続することも可能である。
無線LANユニット70は、無線LANモジュール71を有しており、CPU11は所定のプロトコルに従って外部LANと無線によって接続可能となっている。無線LANモジュール71は、図示しないアクセスポイントの存在を前提として、同アクセスポイントはルータなどを介して外部の広域ネットワーク(例えばインターネット)に接続可能な環境となっていることとする。従って、インターネットを介した通常のメールの送受信やWEBサイトの閲覧といったことが可能である。なお、無線LANモジュール71は、規格化されたカードスロットと、同スロットに接続される規格化された無線LANカードなどから構成されている。むろん、カードスロットは他の規格化されたカードを接続することも可能である。
オプションユニット80は、赤外線通信ユニットと警報発生装置を備えている。赤外線通信ユニットは電灯を含む室内の家電機器に対応した遠隔操作用の赤外線信号を送信する。本実施形態においては、室内の電灯、TVのリモコンとして機能するようになっている。電灯やTVに対する遠隔操作用の赤外線信号は、一旦、各リモコンから赤外線信号を赤外線通信ユニットに向けて送信し、同赤外線通信ユニットが赤外線信号を受信してパターンを記憶し、記憶したパターンを上記CPU11からの指示に従って送信できるようになっている。なお、赤外線信号のパターンの認識は、赤外線通信ユニットがキャリアに搬送されているディジタルパターンをCPU11に対して出力し、同CPUがディジタルパターンを検出するようにしても良い。警報発生装置は、不審者に対して警告を発するものであり、音声合成機能とスピーカを備えている。
次に、上記構成からなる自走式掃除機の動作について説明する。
(1)清掃動作について説明する。
図7及び図8は上記CPU11が実行する制御プログラムに対応したフローチャートを示しており、図9は同制御プログラムに従って本自走式掃除機が走行する走行順路を示す図である。
電源オンにより、CPU11は図7の走行制御を開始する。ステップS110ではAF用パッシブセンサ31の検知結果を入力し、前方エリアを監視する。前方エリアの監視に使用するのはAF用パッシブセンサ31FR,31FM,31FLの検知結果であり、平坦な床面であれば、その撮像イメージから得られるのは図4に示す斜め下方の床面までの距離L1である。それぞれのAF用パッシブセンサ31FR,31FM,31FLの検知結果に基づき、本体BD幅に一致する前方の床面が平坦であるか否かが判断できる。ただし、この時点では、各AF用パッシブセンサ31FR,31FM,31FLが対面している床位置と本体の直前位置までの間の情報は何も得られていないので死角となる。
(1)清掃動作について説明する。
図7及び図8は上記CPU11が実行する制御プログラムに対応したフローチャートを示しており、図9は同制御プログラムに従って本自走式掃除機が走行する走行順路を示す図である。
電源オンにより、CPU11は図7の走行制御を開始する。ステップS110ではAF用パッシブセンサ31の検知結果を入力し、前方エリアを監視する。前方エリアの監視に使用するのはAF用パッシブセンサ31FR,31FM,31FLの検知結果であり、平坦な床面であれば、その撮像イメージから得られるのは図4に示す斜め下方の床面までの距離L1である。それぞれのAF用パッシブセンサ31FR,31FM,31FLの検知結果に基づき、本体BD幅に一致する前方の床面が平坦であるか否かが判断できる。ただし、この時点では、各AF用パッシブセンサ31FR,31FM,31FLが対面している床位置と本体の直前位置までの間の情報は何も得られていないので死角となる。
ステップS120ではモータドライバ41R,41Lを介して駆動輪モータ42R,42Lに対してそれぞれ回転方向を異にしつつ同回転量の駆動を指示する。これにより本体BDはその場で回転を始める。同じ場所での360度の回転(スピンターン)に要する駆動モータ42R,42Lの回転量は予め分かっており、CPU11は同回転量をモータドライバ41R,41Lに指示している。
スピンターン中、CPU11はAF用パッシブセンサ31R,31Lの検知結果を入力し、本体BDの直前位置の状況を判断する。上述した死角はこの間の検知結果により、ほぼなくなり、段差、障害物が何も無い場合、周囲の平坦な床面の存在を検知できる。
ステップS130ではCPU11はモータドライバ41R,41Lを介して駆動輪モータ42R,42Lに対してそれぞれ同回転量の駆動を指示する。これにより本体BDは直進を開始する。直進中、CPU11はAF用パッシブセンサ31FR,31FM,31FLの検知結果を入力し、正面に障害物がいないか判断しながら前進する。そして、同検知結果から正面に障害物たる壁面が検知できたら、その壁面の所定距離だけ手前で停止する。
ステップS130ではCPU11はモータドライバ41R,41Lを介して駆動輪モータ42R,42Lに対してそれぞれ同回転量の駆動を指示する。これにより本体BDは直進を開始する。直進中、CPU11はAF用パッシブセンサ31FR,31FM,31FLの検知結果を入力し、正面に障害物がいないか判断しながら前進する。そして、同検知結果から正面に障害物たる壁面が検知できたら、その壁面の所定距離だけ手前で停止する。
ステップS140では右に90度回転する。ステップS130で壁面の所定距離だけ手前で停止したが、この所定距離は本体BDが回転動作するときに同壁面に衝突せず、また、直前および左右の状況を判断するためのAF用パッシブセンサ31R,31Lが検知する本体幅の外側にあたる範囲の距離である。すなわち、ステップS130にてAF用パッシブセンサ31FR,31FM,31FLの検知結果に基づいて停止し、ステップS140にて90度回転するときには、少なくともAF用パッシブセンサ31Lが壁面の位置を検知できる程度の距離となるようにしている。また、90度回転するときには、上記AF用パッシブセンサ31R,31Lの検知結果に基づいて直前位置の状況を判断しておく。図9はこのようにしてたどり着いた平面図で見たときの部屋の左下角を清掃開始位置として清掃走行を開始する状況を示している。
清掃走行開始位置へたどり着く方法はこれ以外にも各種の方法がある。壁面に当接する状況において右に90度回転するだけでは、最初の壁面の途中から始めることになることもあるため、図9に示すように左下角の最適位置にたどり着くのであれば、壁面に当接して左90度回転し、正面の壁面に当接するまで前進し、当接した時点で180度回転することも望ましい走行制御である。
ステップS150では、清掃走行を実施する。同清掃走行のより詳細なフローを図8に示している。前進走行するにあたり、ステップS210〜S240にて各種のセンサの検知結果を入力している。ステップS210では前方監視センサデータ入力しており、具体的にはAF用パッシブセンサ31FR,31FM,31FL,31CLの検知結果を入力し、走行範囲の前方に障害物あるいは壁面が存在しないか否かの判断に供することになる。なお、前方監視という場合には、広い意味での天井の監視も含めている。
ステップS220では段差センサデータ入力をしており、具体的にはAF用パッシブセンサ31R,31Lの検知結果を入力し、走行範囲の直前位置に段差がないか否かの判断に供することになる。また、壁面や障害物に沿って平行に移動するときには壁面や障害物までの距離を計測し、平行に移動しているか否かの判断に供することになる。
ステップS230では地磁気センサデータ入力をしており、具体的には地磁気センサ43の検知結果を入力し、直進走行中に走行方向が変化していないか否かを判断するのに利用する。例えば、清掃走行開始時の地磁気の角度を記憶しておき、走行中に検出される角度が記憶されている角度と異なった場合には、左右の駆動輪モータ42R,42Lの回転量をわずかに異ならせて進行方向を修正し、元の角度へ戻す。例えば、地磁気の角度に基づいて角度が増加する方向へ変化(359度から0度への変化は例外点となる))したら左方向へ軌道を修正する必要があり、右の駆動輪モータ42Rの回転量を左の駆動輪モータ42Lの回転量よりも僅かに増やすようにそれぞれのモータドライバ41R,41Lへ駆動を制御する指示を出力する。
ステップS240では、加速度センサデータ入力をしており、具体的には加速度センサ44の検知結果を入力し、走行状態の確認に供することになる。例えば、直進走行開始時に概ね一定の方向への加速度を検知できれば正常な走行と判断できるが、回転する加速度を検知すれば片方の駆動輪モータが駆動されていないような異常を判断できる。また、正常な範囲の加速度値を超えたら段差などから落下したり、横転したような異常を判断できる。そして、前進中に後方にあたる方向への大きな加速度を検知したら前方の障害物に当接した異常を判断できる。このように、加速度値を入力して目標加速度を維持するとか、その積分値に基づいて速度を得るというような走行に対する直接的な制御をすることはないが、異常検出の目的として加速度値を有効に利用している。
ステップS250では、ステップS210とステップS220で入力したAF用パッシブセンサ31FR,31FM,31CL,31FL,31R,31Lの検知結果に基づいて障害物の判定を行う。障害物の判定は、正面、天井、直前のそれぞれの部位毎に行う。正面は障害物あるいは壁面の意味として判定し、直前は段差の判定とともに走行範囲外の左右の状況、例えば壁面の有無などを判定する。天井は鴨居などによって天井までの距離が下がってきているときに正面に障害物がないとしても、そこからは廊下であって室外に出てしまうことを判定するのに利用される。
ステップS260では、各センサからの検知結果を総合的に判断し、回避の必要があるか否かを判断する。回避の必要がない限りステップS270の清掃処理を実行する。清掃処理は、サイドブラシとメインブラシを回転させつつ、ゴミを吸引する処理であり、具体的にはモータドライバ53R,53L,54,56に各モータ51R,51L,52,55を駆動させる指示を出力する。むろん、走行中は常に同指示を出しているのであり、後述するように清掃走行の終端条件が成立したときに停止させることになる。
一方、回避が必要と判断されると、ステップS280にて右に90度ターンを実施する。このターンは同じ位置での90度ターンであり、モータドライバ41R,41Lを介して駆動輪モータ42R,42Lに対してそれぞれ回転方向を異にしつつ90度ターンに必要なだけの回転量の駆動を指示する。回転方向は右の駆動輪に対して後退の方向であり、左の駆動輪に対して前進の方向となる。回転中は段差センサであるAF用パッシブセンサ31R,31Lの検知結果を入力し、障害物の状況を判断する。例えば、正面に障害を検知し、右90度ターンを実施したとき、AF用パッシブセンサ31Rが前方右方の直前位置に壁面を検知しなければ単に正面の壁面に当接したといえるが、回転後も前方右方の直前位置に壁面を検知しているのであれば、角部に入り込んでいるといったことが判断できる。また、右90度回転時にAF用パッシブセンサ31R,31Lのいずれもが前方直前に障害を検知しなければ、壁面に当接したのではなく、小さな障害物などであったと判断できる。
ステップS290では障害物を走査しながらの進路変更のため前進する。壁面に当接し、右90度回転後、前進していく。壁面の手前で停止したのであれば、前進の走行量は概ね本体BDの幅分である。その分の前進後、ステップS300では再度右90度ターンを実施する。
以上の移動の間、正面の障害物、前方左右の障害物の有無は常に走査して状況を確認しており、部屋の中の障害物の有無の情報として記憶していく。
ところで、上述した説明では、右90度ターンを2度実行したが、次に前方に壁面を検知した時点で右90度ターンを実行すると元に戻ってしまうので、二度の90度ターンは、右を繰り返したら、次は左を繰り返し、その次は右というように交互に行っていく。従って、奇数回目の障害物回避では右ターン、偶数回目の障害物回避では左ターンとなる。
ところで、上述した説明では、右90度ターンを2度実行したが、次に前方に壁面を検知した時点で右90度ターンを実行すると元に戻ってしまうので、二度の90度ターンは、右を繰り返したら、次は左を繰り返し、その次は右というように交互に行っていく。従って、奇数回目の障害物回避では右ターン、偶数回目の障害物回避では左ターンとなる。
以上のように障害物を回避しながら、部屋の中をつづら折り状に走査して清掃走行を継続していく。そして、部屋の終端にきたか否かをステップS310にて判断する。清掃走行の終端は、二度目のターン後に、壁面に沿って前進して清掃走行を実施し、その後で前方に障害物を検知した場合と、既に走行した部位に入り込んだ場合である。すなわち、前者はつづれ折り状に走行していった最後の端から端への走行後に生じる終了条件であり、後者は後述するように未清掃エリアを発見して再度清掃走行を開始したときの終了条件になる。
この終端条件が成立していなければ、ステップS210へ戻って以上の処理を繰り返す。終端条件が成立していれば、本清掃走行のサブルーチン処理を終了し、図7に示す処理へ復帰する。
復帰後、ステップS160では、これまでの走行経路と走行経路の周囲の状況から未清掃エリアが残っていないか判断する。未清掃エリアの有無の判断は公知の各種の手法を利用可能であり、一例としてこれまでの走行経路をマッピングして記憶していく手法を利用可能である。この例では、上述したロータリーエンコーダの検知結果に基づいて室内での走行経路と、走行中に検出した壁面の有無を記憶領域に確保指定あるマップ上に書き込んでいっており、周囲の壁面が途絶えることなく連続し、かつ、室内の存在していた障害物の周囲も連続し、かつ、室内で障害物を除く範囲を全て走行したか否かで判断する。未清掃エリアが見つかれば、ステップS170で未清掃エリアの開始点へと移動し、ステップS150に戻って清掃走行を再開する。
復帰後、ステップS160では、これまでの走行経路と走行経路の周囲の状況から未清掃エリアが残っていないか判断する。未清掃エリアの有無の判断は公知の各種の手法を利用可能であり、一例としてこれまでの走行経路をマッピングして記憶していく手法を利用可能である。この例では、上述したロータリーエンコーダの検知結果に基づいて室内での走行経路と、走行中に検出した壁面の有無を記憶領域に確保指定あるマップ上に書き込んでいっており、周囲の壁面が途絶えることなく連続し、かつ、室内の存在していた障害物の周囲も連続し、かつ、室内で障害物を除く範囲を全て走行したか否かで判断する。未清掃エリアが見つかれば、ステップS170で未清掃エリアの開始点へと移動し、ステップS150に戻って清掃走行を再開する。
未清掃エリアが複数箇所に散在していたとしても、上述したような清掃走行の終端条件が成立するごとに、未清掃エリアの検出を繰り返していくことにより、最終的には未清掃エリアがなくなる。
(2)セキュリティモードの動作について説明する。
図12は、動作選択の際の液晶表示パネル15bの表示状況を示している。カメラ系ユニット60が装着されていれば、動作選択が行える。操作用スイッチ15aにより、セキュリティモードを選択すると、図13に示すフローチャートに従ってセキュリティモードの動作を実行する
セキュリティモードでは、ステップS400にて各人体センサ21fr,21rr,21fl,21rlの検知結果を入力する。いずれも人体を検知していないときは、一旦セキュリティーモードを終了し、他の処理を実施した後、定期的に本セキュリティモードを繰り返し起動することになる。
(2)セキュリティモードの動作について説明する。
図12は、動作選択の際の液晶表示パネル15bの表示状況を示している。カメラ系ユニット60が装着されていれば、動作選択が行える。操作用スイッチ15aにより、セキュリティモードを選択すると、図13に示すフローチャートに従ってセキュリティモードの動作を実行する
セキュリティモードでは、ステップS400にて各人体センサ21fr,21rr,21fl,21rlの検知結果を入力する。いずれも人体を検知していないときは、一旦セキュリティーモードを終了し、他の処理を実施した後、定期的に本セキュリティモードを繰り返し起動することになる。
ステップS400にていずれかの人体センサ21fr,21rr,21fl,21rlによって人体らしきものを検知した場合には、ステップS410にで無線LANモジュール71の電源と照明用LED64の電源をオンにする。セキュリティモードは家人の留守中は常に起動していなければならず、バッテリーで動作する本自走式掃除機においては節電の必要性が高い。このため、待機時は必須の構成装置のみを起動しておき、必要時に他の構成装置に通電するようにしている。無線LANモジュール71も待機時は通電しておらず、侵入者らしきものを検知した場合のみ通電する。
ステップS420では各人体センサ21fr,21rr,21fl,21rlの検知結果に基づいて検知物体と本体BDとの相対角度を検知する。各人体センサ21が赤外線発光動体における赤外線強度を出力する場合と、単に赤外線発光動体の有無を出力する場合とがある。
赤外線強度を出力する場合、単一の人体センサ21だけが検知するのではなく、複数の人体センサ21が検知すると考えられる。この場合、強度の強い二つの人体センサ21の検知出力を得て、それぞれの対向方向に挟まれる90度の角度範囲内で赤外線発光動体の角度を検知する。この場合、二つの人体センサ21の検知出力の強度比を求め、同強度比を利用して予め実験して作成しておいたテーブルを参照する。このテーブルには強度比と角度との対応が関連づけて記憶されているので、同90度の範囲内での検知対象物の角度が判断でき、さらに検知出力を利用した二つの人体センサ21の取り付け位置に基づいて本体BDとの相対角度を求める。例えば、検知出力の強度の強い二つの人体センサ21が右側面の人体センサ21fr,21rrであり、かつ、強度比から90度の範囲内における人体センサ21frの側の30度の角度が上記テーブルから参照されたとすると、右側面の90度の範囲内で前方側の30度の角度であるから、本体正面に対しては、45度+30度=75度の相対角度ということになる。
一方、単に赤外線発光動体の有無を出力する場合は、基本的に本体BDに対する8つの相対角度だけを検知する。すなわち、いずれか一つの人体センサ21だけが検知出力を出した場合は、同検知出力を出力した人体センサ21の取付位置の角度を相対角度とし、二つの人体センサ21が検知出力を出した場合は、これら二つの人体センサ21の取付位置の中間の角度を相対角度とし、三つの人体センサ21が検知出力を出した場合は、人体センサ21の取付位置の角度を相対角度とする。すなわち、等間隔で複数の人体センサが取り付けられている場合、偶数個であれば中央の二つの人体センサの取付位置の中間であり、奇数個であれば中央の人体センサの取付位置となる。
ステップS430では、同相対角度に本体BDの正面が対面するように左右の駆動輪を駆動させるポジショニングを行う。回転動作であるから、同じ場所でのターン動作であり、左右の駆動輪モータ42R,42Lを逆方向に所定の回転量だけ駆動させるようにモータドライバ41R,41Lに指示を与える。
ステップS440では、ポジショニングを終了して二つのCMOSカメラ61,62に撮影指示を与え、撮影後にその撮像イメージデータを取得する。撮影の指示とデータの取得はバス14とカメラ通信I/O63を介して行なう。
撮像イメージデータの取得後、ステップS450では、無線LANモジュールでの通信が可能か否か、あるいは記憶領域がフルとなったかを判断し、いずれかがオンとなるまでステップS420〜S440を繰り返す。すなわち、無線LANモジュール71はステップS410にて電源オンとされるまで起動しておらず、起動して通信可能となるまでにはいくらかの時間がかかることが普通である。このため、最初の撮影直後に撮像イメージデータを送信できるとは限らず、一方、通信できるまで待機しているだけよりは、さらなる撮影をしておいた方が撮影ミスを防ぐことも可能となる。このため、通信可能となるまでは撮影を繰り返すことを選択している。
撮像イメージデータの取得後、ステップS450では、無線LANモジュールでの通信が可能か否か、あるいは記憶領域がフルとなったかを判断し、いずれかがオンとなるまでステップS420〜S440を繰り返す。すなわち、無線LANモジュール71はステップS410にて電源オンとされるまで起動しておらず、起動して通信可能となるまでにはいくらかの時間がかかることが普通である。このため、最初の撮影直後に撮像イメージデータを送信できるとは限らず、一方、通信できるまで待機しているだけよりは、さらなる撮影をしておいた方が撮影ミスを防ぐことも可能となる。このため、通信可能となるまでは撮影を繰り返すことを選択している。
一方、撮影した撮像イメージデータは記憶しておく必要があり、記憶容量は有限であるから、待機している間は撮影し続けることが可能であるわけでもない。このため、記憶領域がフルとなってしまった場合は撮影を終える。
ステップS450にていずれかの条件が満たされたら、ステップS460にて無線LANで撮像イメージデータを送信し、ステップS470にて無線LANモジュールの電源と照明用LED64の電源をオフにする。その後は、再度、定期的に本セキュリティモードが起動され、さらなる監視を継続する。
ステップS450にていずれかの条件が満たされたら、ステップS460にて無線LANで撮像イメージデータを送信し、ステップS470にて無線LANモジュールの電源と照明用LED64の電源をオフにする。その後は、再度、定期的に本セキュリティモードが起動され、さらなる監視を継続する。
ところで、撮像イメージデータの取得は二つのCMOSカメラ61,62の両方から行うことが好ましい。しかしながら、ユーザの選択により、広角カメラで連続撮影をすることを選択したり、標準カメラで連続撮影をすることを選択するようにしても良い。また、変則的に、広角カメラでは一枚のみ撮影し、以後は標準カメラで撮影するようにしても良い。撮像イメージデータの転送に時間がかかる場合は、複数枚の撮像イメージデータを送信するのに要する時間を考慮すると、広角カメラの画像は一枚で十分であり、それよりも標準カメラの画像を複数枚取得した方が有意義である場合もあるからである。また、標準カメラでの撮影範囲が狭いことを補うため、撮影後、本体BDを少し回転させ、再度、撮影するということを繰り返しても良い。この場合、最初に上記相対角度をなくす方向に対面して撮影し、次に、この位置を基準としてわずかに左に回転して撮影し、その次に右に回転して撮影するというようにしてもよい。むろん、この振り幅を徐々に広げていって撮影範囲を広げていくようにしても良い。
上述した例では撮像イメージデータを無線LAN経由で送信するようにしている。送信先は、サーバの所定領域であっても良いし、インターネットを介して電子メールの添付データとして送信することも可能である。この場合、図14に示すように、液晶表示パネル15bで、セキュリティオプションとして送信方法を選択できるようにしておく。同図に示す例では、「サーバ記憶」と、「無線LANで電子メール送信」と、「本体内記憶」とを表示しており、操作用スイッチ15aにていずれかを選択できるようにしている。そして、電子メールで送信する場合は、図15に示すように電子メール送信アドレスを設定できるようにしておく。
また、上述した実施例では撮影と送信だけを行うようにしているが、撮影後、無線LANで送信できるようになるまでの間に、本体BDを破壊されかねない。従って、撮影後、退避行動を実行するようにしても良い。図16は退避行動を選択できるようにするための液晶表示パネル15bでの選択画面を示している。退避行動は、ジグザグに後退するようにしたり、あるいは予め決定しておいた退避場所へ逃げ込むというようにしてもよい。退避場所は本自走式掃除機が入り込める狭い隙間などがよい。
(3)セキュリティモードの動作の他の例について説明する。
図17は、上記セキュリティモードにおけるステップS410〜S470に代えて行う不審者対応処理のフローチャートである。
上述したステップS400にて人体センサ21が不審者である人体を検知したが、ステップS480以降において段階的な警備を実施する。ここで、人体センサ21による検知結果が不審者情報に相当する。ステップS480では、ステップS410と同様に無線LANの送信準備を実施する。ステップS482では、部屋の照明を付け、室内撮影し、データを無線LANで送信する。
図17は、上記セキュリティモードにおけるステップS410〜S470に代えて行う不審者対応処理のフローチャートである。
上述したステップS400にて人体センサ21が不審者である人体を検知したが、ステップS480以降において段階的な警備を実施する。ここで、人体センサ21による検知結果が不審者情報に相当する。ステップS480では、ステップS410と同様に無線LANの送信準備を実施する。ステップS482では、部屋の照明を付け、室内撮影し、データを無線LANで送信する。
予め、赤外線通信ユニットは室内の電灯を遠隔操作するための赤外線信号のパターンを送出できるようにしてあるため、CPU11は同赤外線通信ユニットに対して電灯を点灯させる赤外線信号を送出させる。また、二つのCMOSカメラ61,62に撮影指示を与え、撮影後にその撮像イメージデータを取得する。撮影の指示とデータの取得はバス14とカメラ通信I/O63を介して行なう。なお、ステップS430と同様にポジショニングをしておいても良い。そして、撮像イメージデータの取得後、無線LANで撮像イメージデータを送信する。送信先は、図14に示す液晶表示パネル15bにて「無線LANで電子メール送信」を選択し、図15に示す電子メール送信アドレスで指定した送信先としている。
以上により、不審者が侵入した時点で、部屋を明るくして威嚇を与え、その時点で室内を撮影して外出中の家人に送信するという第一段階の警備を実現したことになる。
ステップS484では、指定時間内に第二段階移行の指示があるか否かを判断する。ステップS482にて家人に室内の撮像イメージデータを送信しており、家人は例えば携帯電話などで同イメージを確認できている。家人はこの時点で不審者が写っていることもなく、また、その形跡が全くないというようであれば、第二段階移行の必要性はないと判断することも可能である。そして、明確に移行させる必要がないと判断したのであれば、外出先より、インターネットと有線LANと無線LANとを介して本自走式掃除機に対して「不要」の文字を含む電子メールを送信する。本自走式掃除機は、ステップS484の判断に加えて、ステップS486では「移行不可の指示」があるか否かを判断するが、この具体的内容は電子メールを受信し、同電子メール内に「不要」の文字が入っているか否かを判断する処理に対応する。もし、電子メール内に「不要」の文字が入っていれば、「移行不可」と判断する。電子メールを受信できないか、受信しても「不要」の文字が入っていなければ、「移行不可」とは判断しない。
ステップS484では、指定時間内に第二段階移行の指示があるか否かを判断する。ステップS482にて家人に室内の撮像イメージデータを送信しており、家人は例えば携帯電話などで同イメージを確認できている。家人はこの時点で不審者が写っていることもなく、また、その形跡が全くないというようであれば、第二段階移行の必要性はないと判断することも可能である。そして、明確に移行させる必要がないと判断したのであれば、外出先より、インターネットと有線LANと無線LANとを介して本自走式掃除機に対して「不要」の文字を含む電子メールを送信する。本自走式掃除機は、ステップS484の判断に加えて、ステップS486では「移行不可の指示」があるか否かを判断するが、この具体的内容は電子メールを受信し、同電子メール内に「不要」の文字が入っているか否かを判断する処理に対応する。もし、電子メール内に「不要」の文字が入っていれば、「移行不可」と判断する。電子メールを受信できないか、受信しても「不要」の文字が入っていなければ、「移行不可」とは判断しない。
また、家人はすぐに第二段階の警備を実施させた方が良いと判断すれば、本自走式掃除機に対して「移行」の文字を含む電子メールを送信する。本自走式掃除機は明確に「移行」させる指示があるか、時間内に返答がないか、明確に「不要」とさせる指示がない場合に、第二段階の警備を実施する。なお、家人がリアルタイムに本自走式掃除機からの電子メールを受信して見れるとは限らないので、タイムアウトとすべき時間を指定している。
ステップS488は、第二段階の警備に相当し、部屋の照明を点滅し、室内を再撮影し、データを無線LANで送信する。部屋の点滅はCPU11が赤外線通信ユニットに対して対応する赤外線信号を送信させることで実現し、撮影及びデータの送信はステップS482と同様にして行う。
以上により、不審者がいるかもしれないことを前提として、部屋の電灯を数回点滅させることで、不審者には家人がいるかもしれないとの警戒をさせることができる。不審者は自分の姿を明確に見られていないのであれば、何も盗らずに逃げ出す方を選択するはずであり、点滅による威嚇が効果をなす可能性が大きい。むろん、点滅させた後も、室内を撮影して外出中の家人に送信する。これらにより第似段階の警備を実現したことになる。
ステップS490では指定時間内に第三段階移行の指示があるか判断し、ステップS492では「移行不可の指示」があるか否かを判断する。これらの判断は、ステップS484,S486と全く同様である。家人は、部屋の照明を点滅させることで威嚇してみた結果、不審者が退去したことを明確に判断できれば上述したように「不要」の文字を含む電子メールを送信すればよい。一方、不審者の映像がいまだに映っているとか、不審者の気配を感じ取れるなど、すぐに第三段階の警備を実施させた方が良いと判断すれば、本自走式掃除機に対して「移行」の文字を含む電子メールを送信する。
ステップS494は、第三段階の警備に相当し、TVなどのオーディオ機器を大音量で動作し、室内撮影し、データを無線LANで送信する。照明と同様に予め赤外線通信ユニットはTVやオーディオ機器など、音を発生できる機器を遠隔操作するための赤外線信号のパターンを送出できるようにしてあり、CPU11は同赤外線通信ユニットに対してこのような機器から大音量の音声を出させるように指示する。TVであれば、電源をオンにしてボリュームを上げるという制御信号を出させればよいし、ステレオであれば、電源をオンにしてラジオを選択し、ボリュームを上げるという制御信号を出させればよい。撮影及びデータの送信はステップS482と同様にして行う。
以上により、照明の点灯、点滅によって不審者には相当の威嚇を与えているはずであるが、さらなる威嚇として突然大音量を聞かせることになる。不審者はそれまで電灯の点滅程度であれば、さほど威嚇を感じないとしても、大音量が聞こえることで、近隣の気配を引くことも考慮に入れることになり、威嚇の効果が大きい。
その後、ステップS496では指定時間内に第四段階移行の指示があるか判断し、ステップS498では「移行不可の指示」があるか否かを判断する。これらの判断は、ステップS484,S486と全く同様である。家人は、上述したように「不要」の文字を含む電子メールを送信するか、「移行」の文字を含む電子メールを送信すればよい。
ステップS500は、第四段階の警備に相当し、警報発生装置により、室内からの退去を促す音声を出力後、室内撮影し、データを無線LANで送信する。CPU11は音声合成機能とスピーカを有する警報発生装置に対して予め指定しておいた退去メッセージを発生させる。撮影及びデータの送信はステップS482と同様にして行う。退去メッセージが発生されれば、不審者も充実したセキュリティが装着されていることを明確に認識できるので、十分な威嚇は与えられることになる。
その後、ステップS502では指定時間内に第五段階移行の指示があるか判断し、ステップS504では「移行不可の指示」があるか否かを判断する。これらの判断は、ステップS484,S486と全く同様である。家人は、上述したように「不要」の文字を含む電子メールを送信するか、「移行」の文字を含む電子メールを送信すればよい。
これまでの警備でも十分であるが、最後の第五段階の警備として、ステップS506では、警報発生装置により、警察に通報した旨の音声を出力後、室内撮影し、データを無線LANで送信する。CPU11は上記警報発生装置に対して予め指定しておいた警察に通報した旨のメッセージを発生させる。実際に警察に通報するか否かは法的な整備に依存する。一方、警察に通報するのではなく、警備会社に対して通報し、警備会社を経て警察に通報させることも可能である。この場合、上述した無線LANモジュール71を使用し、電子メールを警備会社に送信しても良いし、IP電話機能を利用して警備会社に電話を掛け、音声合成機能により登録しておいた住所などの所在地とともに現在の警備段階を通報するようにしても良い。むろん、併せて家人の連絡先を通報しても良い。
以上のようにステップS482,S488,S494,S500,S506と五段階を設定しておくことが複数の段階的警備指示に相当するし、このフローチャートに従って警備を実行するCPU11などが段階的警備実行制御手段を構成する。
(4)セキュリティモードのオプション動作について説明する。
図18と図19は上述したセキュリティモードに加えて実施することが可能なオプション動作のフローチャートである。
図18は図16に示す退避行動と同様の退避を実現する処理を示している。図17に示すような段階的警備を実施すると、慎重であるが故に、不審者が本自走式掃除機の存在に気が付く可能性も出てくる。本自走式掃除機がセキュリティを実施していることに気が付けば、本自走式掃除機を破壊しようと試みることが考えられるため、ステップS510にて人体を至近距離に検知したか否かを判断し、至近距離に検知したら、ステップS512にて退避行動パターンに基づいて駆動機構を制御する。
(4)セキュリティモードのオプション動作について説明する。
図18と図19は上述したセキュリティモードに加えて実施することが可能なオプション動作のフローチャートである。
図18は図16に示す退避行動と同様の退避を実現する処理を示している。図17に示すような段階的警備を実施すると、慎重であるが故に、不審者が本自走式掃除機の存在に気が付く可能性も出てくる。本自走式掃除機がセキュリティを実施していることに気が付けば、本自走式掃除機を破壊しようと試みることが考えられるため、ステップS510にて人体を至近距離に検知したか否かを判断し、至近距離に検知したら、ステップS512にて退避行動パターンに基づいて駆動機構を制御する。
至近距離か否かの判断は、人体センサ21が赤外線強度を出力するのであれば、強度に対応する距離を設定しておき、検知した強度に基づいて至近距離でらうか否かを推定すればよい。また、単に赤外線発光動体の有無を出力する場合は、近くに来ると複数の人体センサ21が反応するはずであるとの想定のもと、検知結果を出力する人体センサ21の数で至近距離であるか否かを推定しても良い。
このような退避行動処理は、タイマー割り込みなどにより、定期的に実施するのが有効である。従って、ステップS400にて人体センサ21からの検知出力があると判断した後、このタイマー割り込みを有効にし、繰り返し実行する。
また、これと並行して攻撃対処処理を実施しても良い。
図19は、攻撃を受けたときの対処の処理を示している。不審者を至近距離に検知すれば退避行動をとるが、退避行動をとる前に攻撃を受けることがある。物を投げつけられたり、蹴られたり、投げられたりした場合、大きなショックを受けるはずであり、ショックを受けた場合は攻撃を受けたものとして警備段階を繰り上げるようにしている。
また、これと並行して攻撃対処処理を実施しても良い。
図19は、攻撃を受けたときの対処の処理を示している。不審者を至近距離に検知すれば退避行動をとるが、退避行動をとる前に攻撃を受けることがある。物を投げつけられたり、蹴られたり、投げられたりした場合、大きなショックを受けるはずであり、ショックを受けた場合は攻撃を受けたものとして警備段階を繰り上げるようにしている。
ステップS520では、駆動機構を駆動中であるか判断し、駆動中でないときにはステップS522に加速度センサ44から加速度値を取得し、同加速度値が予め決めておいたしきい値よりも大きいか否かを判断する。ステップS520で駆動中であるか否かを判断しているのは、移動中なら、大きな加速度値を検知してしまうこともあるので、誤作動となるからである。
移動中でないときに大きな加速度を得たのであれば、ステップS524に現在の警備段階を取得し、ステップS26にて警備段階を一段階繰り上げる。例えば、第一段階の警備を実行中であれば第二段階の警備を実行させることになるし、第二段階の警備を実行中であれば第三段階の警備を実行させることになる。
繰り上げる段階の数は、一段階である必要はなく、一気に最後の段階まで繰り上げるようにしても良いし、ショックの大きさに応じて比例的に段階の数を繰り上げるということも可能である。むろん、上述した段階的警備は一例に過ぎないので、段階的警備の内容に対応させて繰り上げる段階数を制御しても良い。
この攻撃対処処理も、退避行動処理と同様に、タイマー割り込みなどにより、定期的に実施するのが有効である。従って、ステップS400にて人体センサ21からの検知出力があると判断した後、このタイマー割り込みを有効にし、繰り返し実行する。
以上説明したように、本自走式掃除機では、人体センサ21によって不審者の可能性がある人体を検知したときに、照明の点灯(ステップS482)、照明の点滅(ステップS488)、大音量の発生(ステップS494)、退去メッセージの発生(ステップS500)、警察への通報メッセージの発生(ステップS506)という段階的警備を実施可能であり、各段階において室内の様子を撮影して外出中の家人に送信し、家人からの指示に応じて段階的実行の可否を判断するようにしている。
以上説明したように、本自走式掃除機では、人体センサ21によって不審者の可能性がある人体を検知したときに、照明の点灯(ステップS482)、照明の点滅(ステップS488)、大音量の発生(ステップS494)、退去メッセージの発生(ステップS500)、警察への通報メッセージの発生(ステップS506)という段階的警備を実施可能であり、各段階において室内の様子を撮影して外出中の家人に送信し、家人からの指示に応じて段階的実行の可否を判断するようにしている。
段階的に警備を決めておき、家人からの指示を待ちつつ、徐々に警備の段階を上げていくことができ、誤作動を防止してセキュリティの信頼性を向上させることができる。
10…制御ユニット
20…人体感知ユニット
30…障害物監視ユニット
40…走行系ユニット
50…クリーナ系ユニット
60…カメラ系ユニット
70…無線LANユニット
80…オプションユニット
20…人体感知ユニット
30…障害物監視ユニット
40…走行系ユニット
50…クリーナ系ユニット
60…カメラ系ユニット
70…無線LANユニット
80…オプションユニット
Claims (9)
- 掃除機構を備えた本体と、同本体における左右に配置されて個別に回転を制御可能で操舵と駆動を実現する駆動輪を有する駆動機構とを備える自走式掃除機であって、
上記本体には、
撮影指示を受けて撮影を行い、撮像イメージデータを出力可能なカメラ素子と、
側面に複数備えられて赤外線の受光光量の変化に基づいて赤外線発光動体を検知する人体センサと、
無線LANモジュールを有し、無線LANで有線LANに接続し、同有線LANとインターネットを介して外部と通信を行い、所定のデータを無線で外部に送信し、外部より所定の指示を受信可能な無線送受信手段と、
室内の電灯を含む室内の家電機器を遠隔操作するための赤外線信号を送信可能な赤外線制御信号送信手段と、
上記人体センサにて不審者の情報を取得すると、上記赤外線信号送信手段からの赤外線信号により室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信するとともに、予め定めた複数の段階的警備指示に基づき、上記制御信号送信手段によって室内の家電機器の制御を実行するとともに、上記無線送受信手段による外部との無線交信に基づく外部からの指示に対応し、上記段階的警備指示に従って順次段階を上げて警備を実行する段階的警備実行制御手段とを具備することを特徴とする自走式掃除機。 - 掃除機構を備えた本体と、操舵及び駆動が可能な駆動機構とを備える自走式掃除機であって、
撮影指示を受けて撮影を行い、撮像イメージデータを出力可能なカメラ素子と、
所定のデータを無線で外部に送信し、外部より所定の指示を受信可能な無線送受信手段と、
室内の電灯を含む室内の家電機器を制御するための制御信号送信手段と、
不審者の情報を取得する不審者情報取得手段と、
予め定めた複数の段階的警備指示に基づき、上記不審者情報取得手段にて不審者の情報を取得すると、上記制御信号送信手段によって室内の家電機器の制御と、上記カメラ素子による撮影と、上記無線送受信手段による外部との無線交信を実行し、外部からの指示に対応して上記段階的警備指示に従って順次段階を上げて警備を実行する段階的警備実行制御手段とを具備することを特徴とする自走式掃除機。 - 上記不審者情報取得手段は、本体の周囲における所定距離の範囲内での人体の有無を検知する人体センサを有し、上記段階的警備実行制御手段は、上記人体センサにより人体が至近距離にあることを検知すると、予め指定しておいた走行経路を走行するように上記駆動機構を制御して退避行動を実現することを特徴とする請求項2に記載の自走式掃除機。
- 上記不審者情報取得手段は、加速度センサを有し、上記段階的警備実行制御手段は、不審者の情報を取得したときに上記加速度センサによりショックを表す大きな加速度を検知したときに段階の繰り上げを早めることを特徴とする請求項2または請求項3のいずれかに記載の自走式掃除機。
- 上記制御信号送信手段は、上記家電機器を遠隔操作する赤外線信号を送信する赤外線信号送信手段を有し、上記段階的警備実行制御手段は、上記制御信号送信手段により上記家電機器を同赤外線信号により制御することを特徴とする請求項2〜請求項4のいずれかに記載の自走式掃除機。
- 上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の照明を点灯させてから上記カメラ素子にて室内を撮影し、同カメラ素子から得られる撮像イメージデータを上記無線送受信手段により外部に送信することを特徴とする請求項5に記載の自走式掃除機。
- 上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の照明を点滅させて不審者に対する威嚇を行うことを特徴とする請求項5または請求項6のいずれかに記載の自走式掃除機。
- 上記段階的警備実行制御手段は、上記赤外線信号送信手段からの赤外線信号により室内の音響機器から音声を送出させて不審者に対する威嚇を行うことを特徴とする請求項5〜請求項7のいずれかに記載の自走式掃除機。
- 上記無線送信手段は、無線LANモジュールを有し、無線LANで有線LANに接続し、同有線LANとインターネットを介して外部と通信を行うことを特徴とする請求項2〜請求項8のいずれかに記載の自走式掃除機。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120605A JP2005296510A (ja) | 2004-04-15 | 2004-04-15 | 監視カメラを備えた自走式掃除機 |
| US11/103,009 US20050237189A1 (en) | 2004-04-15 | 2005-04-11 | Self-propelled cleaner with monitoring camera |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120605A JP2005296510A (ja) | 2004-04-15 | 2004-04-15 | 監視カメラを備えた自走式掃除機 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005296510A true JP2005296510A (ja) | 2005-10-27 |
Family
ID=35135864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004120605A Withdrawn JP2005296510A (ja) | 2004-04-15 | 2004-04-15 | 監視カメラを備えた自走式掃除機 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20050237189A1 (ja) |
| JP (1) | JP2005296510A (ja) |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007133668A (ja) * | 2005-11-10 | 2007-05-31 | Funai Electric Co Ltd | セキュリティシステム |
| JP2007183845A (ja) * | 2006-01-10 | 2007-07-19 | Kayaba Ind Co Ltd | 監視装置 |
| JP2012045383A (ja) * | 2010-08-23 | 2012-03-08 | Vorwerk & Co Interholding Gmbh | 自走式装置 |
| KR101123186B1 (ko) * | 2009-03-18 | 2012-03-20 | 에이스전자(주) | 로봇청소기 |
| JP2013125469A (ja) * | 2011-12-15 | 2013-06-24 | Sogo Keibi Hosho Co Ltd | 警備装置および警備動作切替え方法 |
| JP2014142742A (ja) * | 2013-01-23 | 2014-08-07 | Hochiki Corp | 警報システム |
| JP2016049127A (ja) * | 2014-08-28 | 2016-04-11 | 株式会社東芝 | 電気掃除機 |
| JP2016066312A (ja) * | 2014-09-25 | 2016-04-28 | 綜合警備保障株式会社 | 警備システム及び警備方法 |
| JP2017523376A (ja) * | 2014-06-03 | 2017-08-17 | ザ・セキュリティ・オラクル・インク | 防御及び拒絶システム |
| CN107667394A (zh) * | 2015-05-13 | 2018-02-06 | 德国福维克控股公司 | 用于操作自行式清洁设备的方法 |
| JP2018109849A (ja) * | 2016-12-28 | 2018-07-12 | 本田技研工業株式会社 | 制御装置、監視装置及び制御用プログラム |
| KR20200103900A (ko) * | 2019-02-13 | 2020-09-03 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| JP2021077361A (ja) * | 2019-11-12 | 2021-05-20 | ネクストヴイピーユー(シャンハイ)カンパニー リミテッドNextvpu(Shanghai)Co.,Ltd. | 移動ロボット |
| US11054838B2 (en) | 2019-11-12 | 2021-07-06 | NextVPU (Shanghai) Co., Ltd. | Mobile robot |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7477913B2 (en) * | 2005-04-04 | 2009-01-13 | Research In Motion Limited | Determining a target transmit power of a wireless transmission according to security requirements |
| US7436143B2 (en) * | 2005-04-25 | 2008-10-14 | M-Bots, Inc. | Miniature surveillance robot |
| KR20060127452A (ko) * | 2005-06-07 | 2006-12-13 | 엘지전자 주식회사 | 로봇청소기 상태알림장치 및 방법 |
| US7936276B2 (en) * | 2008-03-31 | 2011-05-03 | Heathco Llc | Method and apparatus to facilitate light source flashing |
| US8823542B2 (en) * | 2008-11-26 | 2014-09-02 | Nokia Corporation | Apparatus and methods relevant to electronic devices |
| KR20110119118A (ko) * | 2010-04-26 | 2011-11-02 | 엘지전자 주식회사 | 로봇 청소기, 및 이를 이용한 원격 감시 시스템 |
| US20120277914A1 (en) * | 2011-04-29 | 2012-11-01 | Microsoft Corporation | Autonomous and Semi-Autonomous Modes for Robotic Capture of Images and Videos |
| US9259842B2 (en) * | 2011-06-10 | 2016-02-16 | Microsoft Technology Licensing, Llc | Interactive robot initialization |
| CN204833259U (zh) | 2012-07-17 | 2015-12-02 | 米沃奇电动工具公司 | 电动工具及电动工具系统 |
| CN103728931A (zh) * | 2012-10-10 | 2014-04-16 | 苏州宝时得电动工具有限公司 | 自动行走设备远程监控系统及其远程监控方法 |
| CN103142188B (zh) * | 2013-03-22 | 2015-09-09 | 乐金电子研发中心(上海)有限公司 | 一种具有移动安全监控功能的智能吸尘器 |
| KR101592108B1 (ko) * | 2014-07-23 | 2016-02-04 | 엘지전자 주식회사 | 로봇 청소기 및 그의 제어방법 |
| DE102015111392A1 (de) * | 2015-07-14 | 2017-01-19 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Betrieb eines Flächenbearbeitungsgerätes |
| DE102015113035A1 (de) | 2015-08-07 | 2017-02-09 | Vorwerk & Co. Interholding Gmbh | Flächenbearbeitungsgerät und Basisstation |
| DE102016216291A1 (de) | 2016-08-30 | 2018-03-01 | BSH Hausgeräte GmbH | Überwachung von Raumbereichen mittels Reinigungsroboter |
| KR102662949B1 (ko) * | 2016-11-24 | 2024-05-02 | 엘지전자 주식회사 | 인공지능 이동 로봇 및 그 제어방법 |
| US10026283B1 (en) * | 2017-06-20 | 2018-07-17 | International Business Machines Corporation | Multi-sensor intrusion detection system |
| WO2019009938A1 (en) | 2017-07-05 | 2019-01-10 | Milwaukee Electric Tool Corporation | ADAPTERS FOR COMMUNICATION BETWEEN ELECTRIC TOOLS |
| CN107833424A (zh) * | 2017-10-26 | 2018-03-23 | 绵阳鑫阳知识产权运营有限公司 | 家庭式可防盗智能清洁机器人 |
| CN108806142A (zh) * | 2018-06-29 | 2018-11-13 | 炬大科技有限公司 | 一种无人安保系统,方法及扫地机器人 |
| US11011053B2 (en) | 2018-07-31 | 2021-05-18 | Tti (Macao Commercial Offshore) Limited | Systems and methods for remote power tool device control |
| US11590660B2 (en) | 2018-09-26 | 2023-02-28 | Disney Enterprises, Inc. | Interactive autonomous robot configured for deployment within a social environment |
| US11416002B1 (en) * | 2019-06-11 | 2022-08-16 | Ambarella International Lp | Robotic vacuum with mobile security function |
| KR102747100B1 (ko) * | 2019-07-05 | 2024-12-26 | 엘지전자 주식회사 | 영역별 인체 활동 데이터를 이용하여 주행하는 청소로봇 및 청소로봇을 주행시키는 방법 |
| US12273937B2 (en) | 2021-02-16 | 2025-04-08 | Milwaukee Electric Tool Corporation | Communication between a wireless dust extractor and a power tool |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6658325B2 (en) * | 2001-01-16 | 2003-12-02 | Stephen Eliot Zweig | Mobile robotic with web server and digital radio links |
| US6810305B2 (en) * | 2001-02-16 | 2004-10-26 | The Procter & Gamble Company | Obstruction management system for robots |
| US6507773B2 (en) * | 2001-06-14 | 2003-01-14 | Sharper Image Corporation | Multi-functional robot with remote and video system |
| KR100500842B1 (ko) * | 2002-10-31 | 2005-07-12 | 삼성광주전자 주식회사 | 로봇청소기와, 그 시스템 및 제어방법 |
-
2004
- 2004-04-15 JP JP2004120605A patent/JP2005296510A/ja not_active Withdrawn
-
2005
- 2005-04-11 US US11/103,009 patent/US20050237189A1/en not_active Abandoned
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007133668A (ja) * | 2005-11-10 | 2007-05-31 | Funai Electric Co Ltd | セキュリティシステム |
| JP2007183845A (ja) * | 2006-01-10 | 2007-07-19 | Kayaba Ind Co Ltd | 監視装置 |
| KR101123186B1 (ko) * | 2009-03-18 | 2012-03-20 | 에이스전자(주) | 로봇청소기 |
| JP2012045383A (ja) * | 2010-08-23 | 2012-03-08 | Vorwerk & Co Interholding Gmbh | 自走式装置 |
| JP2013125469A (ja) * | 2011-12-15 | 2013-06-24 | Sogo Keibi Hosho Co Ltd | 警備装置および警備動作切替え方法 |
| JP2014142742A (ja) * | 2013-01-23 | 2014-08-07 | Hochiki Corp | 警報システム |
| JP2017523376A (ja) * | 2014-06-03 | 2017-08-17 | ザ・セキュリティ・オラクル・インク | 防御及び拒絶システム |
| US11574206B2 (en) | 2014-06-03 | 2023-02-07 | The Security Oracle, Inc. | Defense and denial method |
| US11006802B2 (en) | 2014-08-28 | 2021-05-18 | Toshiba Lifestyle Products & Services Corporation | Vacuum cleaner |
| JP2016049127A (ja) * | 2014-08-28 | 2016-04-11 | 株式会社東芝 | 電気掃除機 |
| JP2016066312A (ja) * | 2014-09-25 | 2016-04-28 | 綜合警備保障株式会社 | 警備システム及び警備方法 |
| JP2018517966A (ja) * | 2015-05-13 | 2018-07-05 | フォルヴェルク・ウント・ツェーオー、インターホールディング・ゲーエムベーハーVorwerk & Compagnie Interholding Gesellshaft Mit Beschrankter Haftung | 自律走行式掃除機の動作方法 |
| CN107667394A (zh) * | 2015-05-13 | 2018-02-06 | 德国福维克控股公司 | 用于操作自行式清洁设备的方法 |
| JP2018109849A (ja) * | 2016-12-28 | 2018-07-12 | 本田技研工業株式会社 | 制御装置、監視装置及び制御用プログラム |
| KR20200103900A (ko) * | 2019-02-13 | 2020-09-03 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| KR102677261B1 (ko) * | 2019-02-13 | 2024-06-25 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| JP2021077361A (ja) * | 2019-11-12 | 2021-05-20 | ネクストヴイピーユー(シャンハイ)カンパニー リミテッドNextvpu(Shanghai)Co.,Ltd. | 移動ロボット |
| US11054838B2 (en) | 2019-11-12 | 2021-07-06 | NextVPU (Shanghai) Co., Ltd. | Mobile robot |
| KR20220101140A (ko) * | 2019-11-12 | 2022-07-19 | 넥스트브이피유 (상하이) 코포레이트 리미티드 | 이동 로봇 |
| KR102743768B1 (ko) * | 2019-11-12 | 2024-12-18 | 넥스트브이피유 (상하이) 코포레이트 리미티드 | 이동 로봇 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050237189A1 (en) | 2005-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005296510A (ja) | 監視カメラを備えた自走式掃除機 | |
| JP3832593B2 (ja) | 自走式掃除機 | |
| JP2005304540A (ja) | 監視カメラを備えた自走式掃除機 | |
| CN106575122B (zh) | 自律行驶体 | |
| CN102541059B (zh) | 可自动移动的设备 | |
| JP2005304516A (ja) | 自走式掃除機 | |
| US20050234611A1 (en) | Self-propelled cleaner | |
| JP6685755B2 (ja) | 自律走行体 | |
| JP2005270413A (ja) | 自走式掃除機 | |
| JP6752118B2 (ja) | 自律走行体 | |
| JP7058067B2 (ja) | 自律走行体 | |
| CA2958738C (en) | Vacuum cleaner | |
| JP6158517B2 (ja) | 警報システム | |
| JP2005275898A (ja) | 自走式掃除機 | |
| JP2016042285A (ja) | 自律型移動体 | |
| CN106255932A (zh) | 自主行走体 | |
| KR102390021B1 (ko) | Ai와 레이더를 이용한 지게차 안전시스템 | |
| JP2019103618A (ja) | 電気掃除機 | |
| JP2006043175A (ja) | 自走式掃除機 | |
| US10891866B2 (en) | Parking assist apparatus | |
| CN113391636A (zh) | 基于5g通讯的超声波传感避障的物联网智能巡防机器人 | |
| JP2006095005A (ja) | 自走式掃除機 | |
| US20050120505A1 (en) | Self-directed dust cleaner | |
| JP2006122179A (ja) | 自走式走行機 | |
| US20190005824A1 (en) | Parking Assist Apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20051221 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20060915 |