JP2004284704A - 物品搬送装置 - Google Patents
物品搬送装置 Download PDFInfo
- Publication number
- JP2004284704A JP2004284704A JP2003076668A JP2003076668A JP2004284704A JP 2004284704 A JP2004284704 A JP 2004284704A JP 2003076668 A JP2003076668 A JP 2003076668A JP 2003076668 A JP2003076668 A JP 2003076668A JP 2004284704 A JP2004284704 A JP 2004284704A
- Authority
- JP
- Japan
- Prior art keywords
- lifting
- elevating
- pair
- guide
- article
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000003028 elevating effect Effects 0.000 claims abstract description 122
- 238000012546 transfer Methods 0.000 claims description 16
- 230000032258 transport Effects 0.000 claims description 13
- 230000005856 abnormality Effects 0.000 claims description 10
- 238000004804 winding Methods 0.000 abstract description 13
- 230000002452 interceptive effect Effects 0.000 abstract description 5
- 241000282472 Canis lupus familiaris Species 0.000 description 9
- 239000003638 chemical reducing agent Substances 0.000 description 6
- 230000002159 abnormal effect Effects 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000000034 method Methods 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 239000006096 absorbing agent Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000032683 aging Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0435—Storage devices mechanical using stacker cranes with pulling or pushing means on either stacking crane or stacking area
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0421—Storage devices mechanical using stacker cranes with control for stacker crane operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0428—Transfer means for the stacker crane between the alleys
Abstract
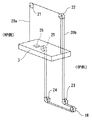
【解決手段】駆動輪体である巻き取りスプロケット18から案内されるリターン側の昇降用チェーン20(20a,20b)は、下部フレーム2の中央部の第4案内スプロケット24から昇降台3の中央に案内されて、第5案内スプロケット25を介してチェーンテンショナー26に連結される構成とする。この構成により、リターン側の昇降用チェーン20は前後の昇降マスト4から十分に離れて配置され、よって走行時に揺れて昇降マスト4に干渉することを防止できる。
【選択図】 図2
Description
【発明の属する技術分野】
本発明は、物品を収納する棚の複数の物品収納部と、所定の搬入出口との間で前記物品の搬送を行う物品搬送装置に関するものである。
【0002】
【従来の技術】
従来の上記物品搬送装置であるスタッカークレーンは、走行レール(一定経路を形成する軌道)に案内されて走行する下部フレーム(走行車体)と、物品を移載するフォーク装置(移載装置)が備えた昇降台と、前記下部フレーム上に立設され前記昇降台を昇降操作自在に案内支持する前後一対の昇降マスト(昇降柱体)と、これら昇降マストの上端部を連結する上部フレーム(上部車体)を備えている。
【0003】
前記昇降台は、その前後両側上部にそれぞれ連結された一対の昇降用チェーンにて吊下げ支持されており、各昇降用チェーンは、上部フレームと一方の昇降マストの上端に設けた案内スプロケットに案内され、続いて前記一方の昇降マストの外方に設けた巻き取りドラム(駆動輪体)に案内され、さらに巻き取りドラムから下部フレーム内のチェーンテンショナーを介して下部フレーム内の前後両側下部位置にそれぞれ設けた案内スプロケットに案内され、これら案内スプロケットから上方へ案内されて昇降台の前後両側下部に連結されている。
【0004】
また前記下部フレームの前記昇降マストより外方位置に、走行レール上を走行自在な前後一対の車輪と、これら前後一対の車輪の一方の車輪(駆動車輪)に連結され、走行車体の走行を行う走行用駆動ユニットと、前記巻き取りドラムに連結され、昇降用チェーンの繰り出しや巻き取り駆動を行う昇降用駆動ユニットが設けられている。また下部フレーム上で、かつ昇降用駆動ユニットを設けた側とは反対側の昇降マストより外方位置に、スタッカークレーンの制御盤が前方向きで昇降マストにサポートされて設置されている。(例えば、特許文献1参照。)
【0005】
【特許文献1】
特公平5−67530号公報
【0006】
【発明が解決しようとする課題】
しかし、従来の上記スタッカークレーンでは、昇降用チェーンは、その一端が昇降台の前後両側上部に連結され、他端が昇降台の前後両側下部に連結されており、一対の昇降用チェーンはそれぞれ前後の昇降マストの近隣に配置されているため、スタッカークレーンの走行時に昇降用チェーン、特に昇降台の前後両側下部に連結されるリターン側のチェーンが揺れて昇降マストに干渉しないように、チェーンテンショナーによる昇降用チェーンの張力(テンション)設定を大きくしなければならず、よって構造が強固なチェーンテンショナーを用意しなければならなかった。また昇降用チェーンに張力設定を上げた、すなわち高価なチェーンを使用しなければならないという問題があった。
【0007】
そこで、本発明は、走行時における前記リターン側のチェーンの昇降マストへの干渉を防止でき、さらにシンプルな構造とする物品搬送装置を提供することを目的としたものである。
【0008】
【課題を解決するための手段】
前述した目的を達成するために、本発明のうち請求項1記載の発明は、軌道に沿って走行する走行車体と、物品を移載する移載装置を設けた昇降台と、前記走行車体に垂直方向に連結され前記昇降台を昇降自在に案内支持する前後一対の昇降柱体を備え、前記物品を収納する複数の物品収納部と、所定の搬入出口との間で前記物品の搬送を行う物品搬送装置であって、
前記昇降台を、この昇降台の前後両側上部にその一端が連結された一対の昇降用索体にて吊下げ支持し、これら一対の昇降用索体を、索体の繰り出し駆動と巻き取り駆動を行う駆動輪体を介して前記走行車体の中央部付近まで案内し、前記一対の昇降用索体の他端を前記昇降台の中央付近に連結したことを特徴とするものである。
【0009】
上記構成によれば、リターン側の昇降用索体は走行車体の中央部付近から昇降台の中央付近に案内されて連結されることにより、昇降柱体から十分に離れて配置され、よって走行車体の走行時に、リターン側の昇降用索体が揺れて昇降柱体に干渉することが防止される。また昇降用索体は、駆動輪体から離れない(歯飛びしない)最低の張力で張ればよくなり、昇降用索体の負担が軽減され、昇降用索体の番手を落とすことが可能となるとともに、テンショナー構造を簡易化とすることが可能となる。
【0010】
また請求項2に記載の発明は、上記請求項1に記載の発明であって、前記昇降台に、前記一対の昇降用索体の張力を設定する張力設定装置を配置したことを特徴とするものである。
【0011】
上記構成によれば、昇降台に張力設定装置を配置したことにより走行車体内に従来のチェーンテンショナーの設置スペースが空き、また従来の「リターン側の昇降用索体をそれぞれ上方へ案内する案内スプロケット」を設置していたスペースが空くことから、走行車体を支持する車輪を内方へ寄せて走行車体へ取付けることができ、走行車体の長さ(機長)を短くすることが可能となる。またリターン側の昇降用索体側のスプロケットの数が最小数となり、昇降用索体の磨耗箇所が減り、長寿命化が図られる。
【0012】
また請求項3に記載の発明は、上記請求項2に記載の発明であって、前記張力設定装置として、前記昇降用索体の張力を設定するバネ体を設け、前記昇降台に、前記バネ体の伸びにより前記昇降用索体の異常を検出する異常検出手段を設けたことを特徴とするものである。
【0013】
上記構成によれば、バネ体により昇降用索体の張力が設定され、またバネ体の伸びにより昇降用索体の異常が検出される。このように昇降用索体の異常、たとえば初期の伸びが検出されると、昇降用索体が弛みが検査され、昇降用索体の張力が再設定される。
【0014】
また請求項4に記載の発明は、上記請求項2に記載の発明であって、前記張力設定装置として、バネ体と、一端が前記昇降用索体の他端に連結され、他端が前記バネ体の一端に連結された移動体と、前記バネ体の他端に連結され、前記昇降用索体の張力を設定する設定治具と、前記移動体の移動位置により、前記昇降用索体の伸びの異常を検出し、前記昇降用索体が切れたことを検出する検出器を設けたことを特徴とするものである。
【0015】
上記構成によれば、昇降用索体(他端)は、移動体とバネ体を介して設定治具に接続され、設定治具によりバネ体の張力を設定することにより、昇降用索体の張力が設定される。また移動体の移動位置により、昇降用索体の伸びに異常が発生したこと、あるいは昇降用索体が切れたことが検出される。このように昇降用索体の伸び異常、たとえば初期の伸びが検出されると、昇降用索体が検査され、昇降用索体の張力が再設定され、また昇降用索体が切れたことが検出されると、昇降用索体が取換えられる。
【0016】
また請求項5に記載の発明は、上記請求項1〜請求項4のいずれかに記載の発明であって、前記駆動輪体を、前記走行車体の前後方向の端部に配置したことを特徴とするものである。
【0017】
上記構成によれば、駆動輪体が走行車体の前後方向の端部に配置されたことにより、昇降用索体を駆動輪体から走行車体の中央部まで案内する途中に案内スプロケットを設ける必要がなくなり、部品点数を少なくでき、シンプルな構造にできる。
【0018】
また請求項6に記載の発明は、上記請求項5に記載の発明であって、一方の昇降柱体の上部に、前記一対の昇降用索体の一方の索体を、前記昇降台の上部一端から水平方向へ案内する第1案内輪体を設け、他方の昇降柱体の上部に、前記第1案内輪体から案内された一方の索体を下方へ案内し、前記一対の昇降用索体の他方の索体を前記昇降台の上部他端から下方へ案内する一対の第2案内輪体を設け、前記他方の昇降柱体の下部に、前記第2案内輪体から案内された一対の昇降用索体を前記駆動輪体へ案内する一対の第3案内輪体を設け、前記走行車体の中央部に、前記駆動輪体から案内された前記一対の昇降用索体を前記昇降台の中央下部に案内する一対の第4案内輪体を設けたことを特徴とするものである。
【0019】
上記構成によれば、昇降用索体の一方の索体は、昇降台の前側上部から、順に第1案内輪体、第2案内輪体、第3案内輪体、駆動輪体、第4案内輪体と案内されて昇降台の下部に連結され、また昇降用索体の他方の索体は、昇降台の後側上部から、順に第2案内輪体、第3案内輪体、駆動輪体、第4案内輪体と案内されて昇降台の下部に連結される。
【0020】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の実施の形態における物品搬送装置を備えた自動倉庫設備の概略斜視図である。
【0021】
図1に示すように、自動倉庫設備FSには、物品出し入れ方向が互いに対向するように間隔を隔てて設置した2基の保管棚Aと、それらの保管棚Aどうしの間に形成された作業通路Bを自動走行するスタッカークレーン(物品搬送装置の一例)Cとが設けられ、各保管棚Aには物品(商品など)Fを載せたパレットPを保管する複数の物品保管部(物品を収納する物品収納部の一例)Dが上下多段かつスタッカークレーンCの走行方向(以下、前後方向と称す)に並設されている。
【0022】
前記作業通路Bには、保管棚Aの長手方向に沿って走行レール(軌道の一例)1が設置され、作業通路Bの一端側(スタッカークレーンのホーム・ポジション側;HP側)に設置した物品搬出入部Eには、スタッカークレーンCを制御して搬入出口と物品保管部Dとの間において物品Fの出し入れを行うとともに、各物品保管部Dに保管されている物品Fを管理する地上コントローラ102(図14)を内蔵した地上制御盤E1と、走行レール1を挟んで、物品捌き手段および搬入出口を形成する一対の物品受け台E2(E2a,E2b)とが設けられ、スタッカークレーンCは、入出庫データに基づいて走行レール1に沿って走行して、物品受け台E2と物品保管部Dとの間での物品Fの搬送・出し入れを行う入出庫用の搬送車として構成されている。
【0023】
なお、前記物品保管部Dの保管棚Aにおける位置(棚番;物品保管部Dを特定する情報)は、バンクのナンバー(保管棚Aの列ナンバー)とレベルのナンバー(保管棚Aの最も下段の物品保管部Dからの段のナンバー)とベイのナンバー(HP位置からの物品保管部Dの前後方向ナンバー)により特定され、物品保管部Dに対する前記入出庫データは、「作業モード(実行する作業情報;入庫作業、出庫作業、ピッキング作業のいずれかが指定される)」、「使用する物品受け台E2の別(左右のいずれか一方が指定される)」、「棚番(作業を実行する物品保管部Dのバンク−ベイ−レベル)」から構成される。
【0024】
前記スタッカークレーンCは、物品保管部Dに沿い、走行レール1に沿って走行する下部フレーム(走行車体の一例)2と、物品保管部Dと物品受け台E2においてパレットP(物品F)を移載するフォーク装置(移載装置の一例)5を設けた昇降台3と、下部フレーム2に垂直方向に連結され昇降台3を昇降自在に案内支持する前後一対の昇降マスト(昇降柱体の一例)4と、これら前後一対の昇降マスト4の上部を連結するとともに、走行レール1に対向して天井部に保管棚Aの長手方向に沿って敷設されたガイドレール(上部軌道の一例)6に案内され、スタッカークレーンCの走行に伴ってスタッカークレーンCの上部位置を規制する上部フレーム(上部車体の一例)7を備えている。上記フォーク装置5は、ランニングフォークを使用したフォーク方式としている。
【0025】
また図2〜図6に示すように、上記下部フレーム2と前後一対の昇降マスト4と上部フレーム7はそれぞれ角パイプ(角状の筒体の一例)により形成されており、下部フレーム2を形成する角パイプの両端部でその長尺方向側面(側方)にそれぞれ、昇降マスト4を形成する角パイプの下端部でその長尺方向側面(側方)が連結され、また上部フレーム7を形成する角パイプの両端部でその長尺方向側面(側方)にそれぞれ、昇降マスト4を形成する角パイプの上端部でその長尺方向側面(側方)が連結されている。また上部部材をフレーム7を形成する角パイプと下部フレーム2を形成する角パイプはそれぞれ、図5および図6に示すように、昇降マスト4を形成する角パイプの同じ側面(側方)側に配置している。
【0026】
また図4に示すように、昇降マスト4の左右方向(スタッカークレーンCが走行する前後方向とは直角な方向)の中心位置CLをスタッカークレーンCの左右方向の略中心位置とし、この略中心位置を両保管棚4間の作業通路Bの略中心位置と一致させている。その結果、下部フレーム2の左右方向中心に位置する走行レール1は、作業通路Bの中心位置よりずれて敷設されている。
【0027】
また図6に示すように、上部フレーム7の前後端部には、長尺方向側面(側方)で、昇降マスト4とは反対の側面にそれぞれ、ガイドレール6を左右から挟み込んで、スタッカークレーンCの走行に伴ってスタッカークレーンCの上部位置を規制する左右一対の上部カイドローラ8が設けられている。また上部フレーム2の長尺方向側面(側方)で、昇降マスト4を設けた側面に、そして一対の昇降マスト4間に、上部フレームカバー9を設けている。
【0028】
また図2〜図5に示すように、下部フレーム2を支持し走行レール1に案内される車輪41を支持する前後一対の車輪ユニット10が、下部フレーム2を形成する角パイプ内で、かつ昇降マスト4が連結された位置と重なるように略同じ位置(下部フレーム2を形成する角パイプの両端部)に配置されている。また前方(HP側)の車輪ユニット10は従動車輪ユニット10a、後方(HPとは前後方向反対のアウトポジション側;OP側)の車輪ユニット10は駆動車輪ユニット10bとされており、駆動車輪ユニット10bの近傍で、かつ下部フレーム2を形成する角パイプの長尺方向側面(側方)で、昇降マスト4が連結された側とは反対側の側面(側方)に、駆動車輪ユニット10bの車輪41の車軸41aに連結され、この車輪41を駆動する走行駆動装置11が配置されている。
【0029】
また下部フレーム2を形成する角パイプの後端部(OP側)の短尺方向側面(側方)に、昇降台3を昇降する昇降駆動装置12が配置され、また下部フレーム2を形成する角パイプ上で、昇降マスト4を形成する角パイプのOP側外方位置に水平支持部材14が取付けられ、この水平支持部材14上にスタッカークレーンCの制御盤13が、その側面が前後方向で、そのOP側の側面に開閉扉13aを設けて配置され、水平支持部材14に防振ゴム体15を介して取付けられている。また制御盤13には両保管棚Aに向いたそれぞれの側面に、ボルト止めで開閉可能な扉13bが設けられている。また制御盤13は自立している。
【0030】
前記昇降駆動装置12は、垂直パネル16に固定されたモータ付き減速装置17からなり、前記垂直パネル16により上記下部フレーム2の後端部に、モータ付き減速装置17の回転駆動軸17aが左右方向を向き、かつ回転中心が下部フレーム2の上面高さより低く、さらに昇降マスト4側へ突出するように固定されている。前記回転駆動軸17a(突出部)に左右一対の巻取りスプロケット(駆動輪体の一例)18が固定され、その結果、巻取りスプロケット18は、下部フレーム2の後方(OP側)の端部(前後方向の端部の一例)で、下部フレーム2の長尺方向側面(側方)の昇降マスト4側外方に位置し、かつ下部フレーム2の略上面高さに配置されている。
【0031】
また図2〜図6に示すように、前記昇降台3は、昇降台3の前後両側上部にその一端が連結された一対の昇降用チェーン20にて吊下げ支持されており、一方(HP側)の昇降マスト4の上部に、一対の昇降用チェーン20の一方のチェーン20aを、昇降台3の前方(HP側)上部一端から水平方向へ案内する第1案内スプロケット(第1案内輪体の一例)21が設けられ、他方(OP側)の昇降マスト4の上部に、第1案内スプロケット21から案内された一方のチェーン20aを下方へ案内し、また一対の昇降用チェーン20の他方のチェーン20bを昇降台3の後方(OP側)上部他端から下方へ案内する一対の第2案内スプロケット(第2案内輪体の一例)22が設けられている。さらに前記他方の昇降マスト4の下部に、第2案内スプロケット22から、他方の昇降マスト4の角パイプ中空部を通って案内された一対の昇降用チェーン20a,20bを巻取りスプロケット18へ案内する一対の第3案内スプロケット(第3案内輪体の一例)23が設けられ、さらに下部フレーム2の中央部付近で、昇降マスト4を設けた長尺方向側面(側方)に、一対の巻取りスプロケット18から案内されたリターン側一対の昇降用チェーン20a,20bを昇降台3の中央下部に案内する一対の第4案内スプロケット(第4案内輪体の一例)24が設けられている。
【0032】
また昇降台3の中央付近の下部に、一対の第4案内スプロケット24により垂直方向へ案内されたリターン側一対の昇降用チェーン20a,20bを水平方向へ案内する一対の第5案内スプロケット(第5案内輪体)25が設けられ、この一対の第5案内スプロケット25により水平に案内された昇降用チェーン20a,20bの他端は、昇降台3内に配置され、一対の昇降用チェーン20a,20bの張力を設定するチェーンテンショナー(張力設定器の一例)26に連結されている。
【0033】
これら案内スプロケット21,22,23,24,25と巻取りスプロケット18の構成により、図7に示すように、一対の昇降用チェーン20の一方のチェーン20aは、昇降台3の前方(HP側)上部一端から、昇降マスト4上部の第1案内スプロケット21、第2案内スプロケット22、さらに他方の昇降マスト4下部の第3案内スプロケット23、チェーンの繰り出し駆動と巻き取り駆動を行う巻取りスプロケット18を介して、下部フレーム2の中央部の第4案内スプロケット24まで案内され、さらに垂直に昇降台3の中央(下部)まで案内され、昇降台3の中央下部の第5案内スプロケット25を介してチェーンテンショナー26に連結されている。また一対の昇降用チェーン20の他方のチェーン20bは、昇降台3の後方(OP側)上部他端から、他方の昇降マスト4上部の第2案内スプロケット22、他方の昇降マスト4下部の案内スプロケット23、巻取りスプロケット18を介して、下部フレーム2の中央部の第4案内スプロケット24まで案内され、さらに垂直に昇降台3の中央(下部)まで案内され、昇降台3の中央下部の第5案内スプロケット25を介してチェーンテンショナー26に連結されている。
【0034】
前記チェーンテンショナー26は、図8に示すように、
各昇降用チェーン20a,20bの張力をそれぞれ設定するための一対のテンションスプリング(バネ体の一例)31と、
前記一対の第5案内スプロケット25の回転軸をそれぞれ左右方向向きに水平に支持する一対のテンショナーブラケット32と、
これらテンショナーブラケット32に開口された水平溝32aに沿ってそれぞれ水平方向に自在に移動可能で、一端に第5案内スプロケット25により水平に案内された各昇降用チェーン20a,20bの他端が連結され、他端に各テンションスプリング31の一端が連結される一対のドグ(移動体の一例)33と、
各テンションスプリング31の他端が連結され、昇降用チェーン20a,20bの張力を設定する一対のチェーンボルト(設定治具の一例)34と、
これらチェーンボルト31を支持するチェーンボルトブラケット35と、
各ドグ33の下端部にそれぞれ水平に取り付けられたコ字状の部材33aにより動作され、ドグ33の移動位置により、各昇降用チェーン20a,20bの伸びの異常を検出し、昇降用チェーン20a,20bが切れたことを検出する2方向動作の一対のレバー式リミットスイッチ(検出器、異常検出手段の一例)36と、
第5案内スプロケット25へ案内される各昇降用チェーン20a,20bが後方(OP側)へ揺れて外れることを防止する一対の下部アイドラ37
から構成されている。
【0035】
このチェーンテンショナー26の構成により、各昇降用チェーン20a,20bの張力が、ドグ33、テンションスプリング31を介して連結された一対のチェーンボルト34の繰り出し長さを調整することにより調整され、また昇降用チェーン20aまたは20bの伸びに異常が発生したとき(経年変化でチェーンが伸びたとき)または切れたとき、リミットスイッチ36が動作することにより、昇降用チェーン20aまたは20bの異常が検出される。
【0036】
以下、上記車輪ユニット10(従動車輪ユニット10aと駆動車輪ユニット10b)について説明する。
図9〜図11に示すように、車輪ユニット10は、下部フレーム2を支持し走行レール1に案内される車輪41と、この車輪41を走行レール1に案内させるために、前後方向とは直角な左右方向に配置される左右一対のガイドローラ(案内輪体の一例)55とを備えた一体構造とされており、下部フレーム2を形成する角パイプ内に取付自在とされている。
【0037】
すなわち、前記車輪41は、この車輪41の車軸(回転軸)41aが一対の軸受42により回転自在に水平に支持され、これら軸受42はそれぞれ一対の専用の車輪ハウジング(枠体の一例)43により支持され、図11に示すように、軸受42の外輪42aがそれぞれ車輪ハウジング43に押さえ部材44により外方から固定され、また一方の軸受42の内輪42bが、一方の車軸41a外端に設けられたネジ溝にナット45を絞めることにより車軸(回転軸)41aに固定されている。また各車輪ハウジング43の側方前後端部の下方にはそれぞれ、貫通孔46が設けられ、また上部前後端にはそれぞれ、下部フレーム2への取付用ネジ穴47が設けられ、また後面下方位置にはそれぞれ、後述するローラブランケットを固定するネジ穴48が設けられている。
【0038】
また前記一対の車輪ハウジング43は合わされると、車輪41の上部と下部がそれぞれ突出する上方中央部と下方中央部が開放された箱体となるように構成されており、前記貫通孔46を通したボルト49をナット(図示せず)で絞めることにより連結されて、車輪41と一対の軸受42と一対の車輪ハウジング43からなる車輪支持部(車輪装置の一例)50が形成されている。
【0039】
また左右一対のガイドローラ55は、これら回転軸55aが左右対称にローラブランケット(支持部材の一例)56により回転自在に垂直に支持され、このローラブランケット56には、車輪支持部50の後部下方位置の左右一対の前記ネジ穴48にそれぞれ対向するボルト孔57を有する取付部56aが設けられており、ローラブランケット56は前記ネジ穴48とボルト孔57を合わせて、ボルト孔57を通したボルト58を絞めることにより、車輪支持部50(車輪ハウジング43)の下方位置で後面に連結される。
【0040】
このように車輪支持部50に、ガイドローラ55を支持するローラブランケット56が取付けられて、車輪41とガイドローラ55が一体構造とされた車輪ユニット10が形成され、車輪ユニット10は、車輪ハウジング43の四方に配置された前記ネジ穴47と下部フレーム2に設けた貫通孔(図示せず)を合わせて、この貫通孔を通したボルト60をネジ穴47で絞めることにより、角パイプから形成される下部フレーム2内に取り付けられる。
【0041】
前記駆動車輪ユニット10bは、車輪ユニット10(従動車輪ユニット10aに相当する)の車軸(回転軸)41aに走行駆動装置11を連結して構成される。走行駆動装置11は、モータ付き減速装置63と、このモータ付き減速装置63を下部フレーム2に支持するトルクアーム(支持部材の一例)64と、モータ付き減速装置63の回転軸63aと車輪ユニット10の車軸(回転軸)41aを連結する連結器65から構成されている。
【0042】
トルクアーム64は、図12,図13に示すように、
モータ付き減速装置63の回転軸63a(図11)を通す貫通孔71と、モータ付き減速装置63(減速部)の内側面に設けたネジ孔(図示せず)に対向する4ヶ所の貫通孔72を有し、モータ付き減速装置63(減速部)が貫通孔72を通したボルト73(図11)により固定される平板状の第1部材74と、
垂直方向に貫通孔75を有し、その側面に縦方向の3つのネジ孔76を有する筒状の第2部材77と、
第2部材77を垂直姿勢で入れることが可能で、第2部材77の貫通孔75に合わせて上下面にそれぞれ貫通孔78を設けた断面コ字状の板材から形成され、第1部材74の前方向(前後方向の一例)の一方の端面に前記板材の上下面の端部が固定される第3部材79と、
第3部材79の上下の貫通孔78および第2部材77の貫通孔75を通って設けられ、第3部材79に第2部材77を、これら第3部材79,第2部材77間に隙間(遊び)tを設けて連結する、先端にネジ部を設けたピン80およびピン80の先端ネジ部に絞められるナット81(連結材の一例)と、
下部フレーム2に固定される固定面82aと下部フレーム2に対して左右方向に突出させた取付面82bを有するL字状の板材から形成され、取付面82bに前記筒状の第2部材77の3つのネジ孔76に対向した3つの貫通孔83を有し、各貫通孔83を通したボルト84により第2部材77が垂直な姿勢で固定されるブラケット82と
が設けられている。
【0043】
上記トルクアーム64の組立ては次のような手順で行われる。
まず3本のボルト84により第2部材77が垂直な姿勢でブラケット82が固定され、このブラケット82は下部フレーム2の車輪ユニット10より前方の長尺方向側面に固定される。次に、モータ付き減速装置63の回転軸63aを貫通孔71に通して、モータ付き減速装置63(減速部)が貫通孔72を通したボルト73により第1部材74に固定される。次に、モータ付き減速装置63が固定された第1部材74と第3部材79は、第3部材79の空間に第2部材77を入れた姿勢で連結材により、すなわちピン80を第3部材79の上下の貫通孔78および第2部材77の貫通孔75を通してナット81を締めることにより第2部材77に連結され、下部フレーム2に固定されたブラケット82に取り付けられる。このとき、第3部材79と第2部材77の接触面に隙間(遊び)tが設けられる。
【0044】
このトルクアーム64の構成により、モータ付き減速装置63が(駆動)車輪41を回転させるときの駆動反力でその回転軸(駆動軸)63aの周りに発生するトルク(図12に矢印で示す)は、モータ付き減速装置63を固定した第3部材79と第2部材77の接触面で受けられる。このとき、接触面の隙間(遊び)tにより、第2部材77に作用するトルクが弱められることにより、第3部材79と第2部材77が強いトルクで破損することを避けることができる。このようにトルクは第3部材79と第2部材77の接触面で受けられることにより、ピン80にトルクが作用せず、ピン80は単に位置決めとして使用されている。
【0045】
また図1〜図4に示すように、下部フレーム2上のHP側の端部に、物品搬出入部Eの地上コントローラ102とのデータの送受信を行う第1光送受信器91が設けられている。
【0046】
また図1〜図4に示すように、下部フレーム2を形成する角パイプの両端部の長尺方向側方で、昇降マスト4が連結された側とは反対側の側方にそれぞれ、走行レール1の両端(HP側とOP側)にそれぞれ設けたバンパー(衝撃吸収体の一例)92の先端部がスタッカークレーンCの前後端より内方で(機長より引き込むように)接触するように接触板(接触面の一例)92aが配置されて、機長を延ばすことがないようにしている。
【0047】
また図5に示すように、HP側の昇降マスト4のHP側側面下部には、作業通路Bの一端側(HP側)に設置されたレーザ測距計93(図14)から投射されたビーム光を反射する反射体93aが設けられ、また図3および図5に示すように、下部フレーム2上のOP側の端部に垂直方向に昇降台3の垂直測距用のビーム光を投射し、昇降台3の下部に対向して設けられた反射体(図示せず)により反射された反射光により距離を測定するレーザ測距計94が設けられている。
【0048】
また図4(b)に示すように、昇降マスト4が連結された側とは反対側の保管棚Aの下端部に、長手方向(前後方向)に沿って給電レール95が敷設され、下部フレーム2のOP側の長尺方向側方で、昇降マスト4が連結された側とは反対側の側方に、図2、図4(b)、図5に示すように、給電レール95より給電される集電子96が設けられている。この集電子96より、図14に示すように、制御盤13内に設けられた電源装置97と昇降用インバータ98と走行・移載用インバータ99に給電され、また電源装置97より制御盤13内に設けたコントローラ100へ給電されている。
【0049】
図14に示すように、走行・移載用インバータ99は、リレイ101により走行用モータ付き減速装置63およびフォーク装置5が切り換えられるように接続されており、走行・移載用インバータ99は、コントローラ100より出力される指令信号に応じて走行用モータつき減速装置63またはフォーク装置5を駆動する。また前記昇降用インバータ98は、コントローラ100より出力される指令信号に応じて昇降用モータ付き減速装置17を駆動する。
【0050】
また地上制御盤E1に地上コントローラ102が収納され、物品搬出入部Eには、上記第1光送受信器91に対向して第2光送受信器103が設けられ、地上コントローラ102に、この第2光送受信器103とレーザ測距計93が接続されている。
【0051】
上記コントローラ100によりパレットPの入出庫作業が実行される。すなわち、地上制御盤E1の地上コントローラ102から第2光送受信器103、第1光送受信器61を介して上記入出庫データと走行用レーザ測距計93により測定された下部フレーム2の走行位置データを受け、前記入出庫データに基づく昇降台3の昇降位置を目標値とし、昇降用レーザ測距計94により測定された昇降台3の昇降位置データをフィードバックデータとして昇降用インバータ98を介して昇降用モータつき減速装置17を制御して昇降台3の昇降制御を実行し、また前記入出庫データに基づく下部フレーム2の走行位置を目標値とし、入力した上記下部フレーム2の走行位置データをフィードバックデータとして走行・移載用インバータ99を介して走行用モータつき減速装置63を制御して下部フレーム2の走行制御を実行し、さらにパレットPの移載に際してリレイ101を切り換えて走行・移載用インバータ99を介して移載用のフォーク装置5の出退制御を実行している。
【0052】
以上のように本実施の形態によれば、リターン側の昇降用チェーン20(20a,20b)は下部フレーム2の中央部付近の第4案内スプロケット24から昇降台3の中央付近に案内されて、第5案内スプロケット25を介してチェーンテンショナー26に連結されることにより、前後の昇降マスト4から十分に離れて配置され、よって下部フレーム2の走行時にリターン側の昇降用チェーン20が揺れて昇降マスト4に干渉することを防止でき、さらに昇降用チェーン20を駆動輪体である巻き取りスプロケット18から離れない(歯飛びしない)最低の張力で張ればよくなり、昇降用チェーン20の負担を軽減でき、よって昇降用チェーン20の番手を落とすことが可能となり、またチェーンテンショナー26の構造を簡単な構造(昇降用チェーン20に強い張力を発生させる必要がない構造)とすることができ、コストを低減することができる。
【0053】
また本実施の形態によれば、昇降台3にチェーンテンショナー26を配置したことにより下部フレーム2内に従来のチェーンテンショナーの設置スペースが空き、さらに巻き取りスプロケット18とこの巻き取りスプロケット18からリターン側の昇降用チェーン20を案内する第4案内スプロケット24を長尺方向の側方に配置したことにより、下部フレーム2内のスペースが空くことから、下部フレーム2を支持する車輪ユニット10(10a,10b)を内方へ寄せて下部フレーム2内へ取付けることができ、下部フレーム10の長さ(機長)を短くすることができる。よって、狭いスペースへの配置を有利とすることができる。またリターン側の昇降用チェーン20を案内するスプロケットの数を最小数とすることができ、よって昇降用チェーン20の磨耗箇所を減らすことができ、より長寿命とすることができる。
【0054】
また本実施の形態によれば、図8に示すように、昇降用チェーン20(他端)は、ドグ33、テンションスプリング31、チェーンボルト34と接続され、チェーンボルト34の調整によりテンションスプリング31の張力を設定することにより、このような簡易化された構造でも昇降用チェーン20の張力を設定することができる。またドグ33の移動位置によりリミットスイッチ36が動作し、昇降用チェーン20の伸びに異常が発生したこと、あるいは昇降用チェーン20が切れたことを検出することができる。このように昇降用チェーン20の伸び異常、たとえば初期の伸びが検出されると、昇降用チェーン20の弛みが検査され、チェーンボルト34の調整により昇降用チェーン20の張力が再設定され、チェーン20が案内スプロケット21,22,23,24,25や巻き取りスプロケット18から外れてしまうことを防止することができる。また昇降用チェーン20が切れたことが検出されることにより、昇降用チェーン20を取換えることができる。
【0055】
また本実施の形態によれば、図5に示すように、巻き取りスプロケット18が下部フレーム2の後方向の端部で、長尺方向側方の昇降マスト4側外方に位置し、かつ下部フレーム2の略上面高さに配置されたことにより、昇降用チェーン20を巻き取りスプロケット18から下部フレーム2の中央部まで案内する途中に案内スプロケットを設ける必要がなくなり、部品点数を少なくすることができ、、シンプルな構造にできる。
【0056】
また本実施の形態によれば、角パイプ(角状の筒体の一例)により形成されている下部フレーム2の前後方向側面(長尺方向側方)に、角パイプにより形成される昇降マスト4の下端部を連結したことにより、昇降マスト4に対向する下部フレーム2を形成する角パイプ内に、下部フレーム2を支持する車輪ユニット10(10a,10b)を取付けることが可能となり、走行時の安定を確保しながらスタッカークレーンCの長さ(機長)を短くすることができ、狭いスペースへの配置を有利とすることができる。またスタッカークレーンCを主に構成する、下部フレーム2と昇降マスト4がそれぞれ角パイプで構成されることにより、全体を軽量化でき、輸送コストを低減することができる。
【0057】
また本実施の形態によれば、角パイプにより形成される下部フレーム2の側方に、角パイプにより形成される昇降マスト4の下端部を連結し、角パイプにより形成される上部フレーム7の側方に、角パイプにより形成される昇降マスト4の上端部を連結したことにより、少なくともスタッカークレーンCの高さを上部フレーム4の角パイプ分(短尺方向側面の長さ分)だけ低くすることができ、天井までの高さに制限があるときに有利とすることができる。
【0058】
また本実施の形態によれば、角パイプにより形成される上部フレーム7と角パイプにより形成される下部フレーム2をそれぞれ、角パイプにより形成される昇降マスト4の同じ側方に配置したことにより、スタッカークレーンCの左右方向のバランスを良くすることができ、よってスタッカークレーンCを案内するガイドレール6への負担を軽減することができ、ガイドレール6の設置を有利とすることができる。
【0059】
また本実施の形態によれば、昇降マスト4の位置を前後に走行するスタッカークレーンCのほぼ中心位置としたことにより、昇降マスト4に対して左右方向へ突出する下部フレーム2とは反対側に左右方向のスペースを確保でき、作業通路Bやメンテナンスエリアとして使用することができる。
【0060】
また本実施の形態によれば、下部フレーム2の前後方向側面(長尺方向側方)に、昇降マスト4の下端部を連結し、下部フレーム2に、この下部フレーム2を支持する車輪ユニット10(10a,10b)を昇降マスト4が連結された位置と重なるように設けたことにより、走行時の安定を確保しながらスタッカークレーンCの機長を短くすることが可能となる。よって、狭いスペースへの配置を有利とすることができる。
【0061】
また本実施の形態によれば、走行駆動装置11を、昇降マスト4が連結された側とは反対側の下部フレーム2の前後方向側面に配置することにより、昇降マスト4に対向する下部フレーム2を形成する角パイプ内に取付けた駆動車輪ユニット10bに、最も接近して走行駆動装置10を配置することができる。
【0062】
また本実施の形態によれば、下部フレーム2を形成する角パイプの左右方向側面(短尺方向側方)に昇降駆動装置12を配置したことにより、昇降台3を昇降する昇降用チェーン20の駆動は下部フレーム2の側方で行うことが可能となり、よってこの昇降駆動装置12により駆動される巻き取りスプロケット18からリターンする昇降用チェーン20の引廻しを、下部フレーム2より低い位置から行うことが可能となり、昇降用チェーン20を巻き取りスプロケット18から下部フレーム2の中央部まで案内する途中に案内スプロケットを設ける必要をなくすことができ、部品点数を少なくすることができる。
【0063】
また本実施の形態によれば、作業通路B(下部フレーム2が走行する走行レール1と物品保管部Dとの間の空間)に作業者が入ってスタッカークレーンCの調整・点検を行うとき、制御盤13の側面が前後方向を向いていることから制御盤13と物品保管部D(保管棚A)との左右方向間隔を広くとることが可能となることから、作業者は作業通路Bを移動しやすくなり、また前記間隔内で制御盤13の開閉扉13aの開閉を行うことができることから作業者は作業しやすくなり、作業効率を向上させることができる。さらに制御盤13の側面が前後方向を向いていることから、自立させて設置することができ、昇降マスト4からサポートする必要をなくすことができる。
【0064】
また本実施の形態によれば、走行レール1の終端にバンパー(衝撃吸収体)92を配置したことにより、衝突時の衝撃がバンパー92により吸収されてスタッカークレーンCの破損を回避できるとともに、バンパー92への接触板92aをスタッカークレーンCの前後端より内方に配置したことにより、バンパー92との接触面がスタッカークレーンCの機長から突出してしまうことを避けることができ、スタッカークレーンCの機長を短くすることができ、狭いスペースへの配置を有利とすることができる。
【0065】
また本実施の形態によれば、トルクアーム64の構成により、モータ付き減速装置63が車輪41を回転させるときの駆動反力でその回転軸(駆動軸)63aの周りに発生するトルクが、モータ付き減速装置63を固定した第3部材79と第2部材77の接触面で受けられることによって、ピン80にトルクが作用せず、ピン80は単に位置決めとして使用されることから、従来のようにモータ付き減速装置63の容量が大きくなると、ピン80の径を大きくしなければならないとか、ピン80とモータ付き減速装置63の距離を離さなければならないとかする必要をなくすことができ、トルクアーム64をコンパクトにすることができ、その結果、モータ付き減速装置63を加えた走行駆動装置11の形状をコンパクトとすることができ、下部フレーム2への取り付けを容易にすることができる。またモータ付き減速装置63の容量が大きくなっても、第3部材79と第2部材77(ブラケット側)で好きな強度を持たせることができ、コンコン当るところの強度を上げてやることでモータ付き減速装置63の容量が大きくなっても大きくする必要をなくすことができる。
【0066】
また本実施の形態によれば、第3部材79と第2部材77の接触面の隙間(遊び)tにより、第2部材77に作用するトルクを弱めることができ、第3部材79と第2部材77が強いトルクで破損することを避けることができる。
【0067】
また本実施の形態によれば、一対の軸受42をそれぞれ専用の車輪ハウジング43により支持する構成としたことにより、各車輪ハウジング43を加工精度を持たせて製作でき、よって従来のように自動調心軸受を使用する必要がなくなり、軸受42として一般の安価な玉軸受けを使用することができ、コストを低減することができる。さらに車輪ハウジング43を合わせた車輪支持部50の形状がコンパクトになることから、車輪ユニット10をコンパクトとすることができる。
【0068】
また本実施の形態によれば、前後一対の車輪ユニット10はコンパクトとなることにより、角パイプから形成される下部フレーム2内に余裕を持って収めることができ、よって従来のように車輪が下部フレーム2の前後外方に配置されたときと比較して、スタッカークレーンCの機長を短くすることができ、狭いスペースへの配置を有利とすることができる。
【0069】
また本実施の形態によれば、車輪ハウジング43にガイドローラ55用のローラブラケット56が固定されることにより、車輪41とガイドローラ55を一体化でき、一体化した状態、すなわち車輪41とガイドローラ55が一体構造となった車輪ユニット10が下部フレーム2に取付けられることにより、取り付け作業が容易となり、作業効率を改善できる。
【0070】
なお、本実施の形態では、物品搬送装置であるスタッカークレーンCを、下部フレーム2と昇降台3と昇降マスト4と上部フレーム7を備えた構成としているが、必ずしも上部フレーム7を設けない構成とすることも可能である。このとき、昇降マスト4の上部に天井のガイドレール6に案内されるガイドローラ8を設ける。
【0071】
また本実施の形態では、物品搬送装置であるスタッカークレーンCの昇降マスト4を前後一対(2本)としているが、必ずしも前後一対必要ではなく、1本の昇降マストとすることも可能である。このとき、昇降台3は1本の昇降マストに沿って上下に案内され、1本の昇降索体(チェーン)により昇降駆動される。
【0072】
また本実施の形態では、リターン側の昇降用チェーン20(20a,20b)を導く第4案内スプロケット24を、下部フレーム2の中央部付近に配置し、第4案内スプロケット24に対向する第5案内スプロケット25を、昇降台3の中央付近に設けているが、これら第4案内スプロケット24と第5案内スプロケット25は、リターン側の昇降用チェーン20(20a,20b)を前後の昇降マスト4から離れて導くことができる箇所に設ければよい。このとき、第4案内スプロケット24を、下部フレーム2の昇降マスト4から離れた箇所、第5案内スプロケット25を、昇降台3の昇降マスト4から離れた箇所に設ける。
【0073】
また本実施の形態では、昇降用索体としてチェーンを使用しているが、ワイヤやロープを使用することもできる。このとき、スプロケットに代えてシーブやプーリーを使用する。
【0074】
また本実施の形態では、昇降用チェーン20a,20bの一端を昇降台3の前後上部に固定し、駆動輪体である巻き取りスプロケット18まで引廻して他端を昇降台3の下部に固定しているが、各昇降用マスト4内の中空部にそれぞれ上下に移動可能なカウンタウェイトを設け、巻き取りスプロケット18から案内されたリターン側の昇降用チェーン20a,20bを再び各昇降マスト4の上部まで引廻し、他端をそれぞれ前記カウンタウェイトに接続するようにすることも可能である。
【0075】
また本実施の形態では、チェーンテンショナー26において、ドグ33を介して各昇降用チェーン20a,20bとテンションスプリング31を接続しているが、必ずしもドグ33は必要ない。このとき、各昇降用チェーン20a,20bとテンションスプリング31を直接接続する。
【0076】
また本実施の形態では、バンパー92を走行レール1の両終端に配置し、バンパー92への接触板92aをスタッカークレーンCに設けているが、逆にバンパー92をスタッカークレーンCの接触板92aを取り付けている位置に設け、バンパー92への接触板92aを、バンパー92を設けている走行レール1の両終端に配置してもよい。
【0077】
また本実施の形態では、物品収納部を保管棚Aの物品保管部Dにより形成しているが、棚構造の物品収納部に限ることはなく、物品Fを載置したパレットPを平置きするような物品収納部であってもよい。また物品収納部である保管棚Aを、左右方向に並設しているが、片方にだけ配置した構成とすることもできる。また各保管棚Aをそれぞれ、前後方向に物品保管部Dを有する構成としているが、各保管棚Aを前後方向のみでなく左右方向(奥行き方向)に物品保管部Dを並べた構成とすることもできる。このとき、フォーク装置5を、フォーク(出し入れ具)が各保管棚Aの左右方向の各物品保管部Dに対して位置決め出退可能な構成(ダブルディープタイプ)とする。
【0078】
また本実施の形態では、物品Fの移載を行うフォーク装置(移載装置の一例)5をランニングフォークを使用したフォーク方式としているが、フォーク方式に限ることはなく、互いに接近離間方向に移動自在で物品Fの側面を挟持する一対の搬送用ベルトを備えたサイドベルト方式、あるいは互いに接近離間方向に移動自在で物品Fの側面を挟持して物品Fを移載する一対のフォークを備えたサイドクランプ方式、あるいは物品Fに取っ手がある場合にこの取っ手を把持あるいは支持して物品Fを移載するフック方式、あるいは物品Fに裏面にフォークが移動して裏面から物品Fを押して物品保管部Dから昇降台3上へ移載し、物品Fの前面にフォークが移動して前面から物品Fを押して昇降台3から物品保管部D上へ移載するアーム方式のフォーク装置とすることができる。
【0079】
また本実施の形態では、搬入出部Eの一対の固定式の物品受け台E2a,E2bを物品Fの搬入出を行う搬入出口として使用しているが、これら物品受け台E2a,E2bを、物品Fの搬入口専用または搬出口専用として使用することもできる。また物品Fの捌き手段として、物品受け台E2a,E2bを使用しているが、コンベヤ装置、自走台車、リフター付物品受け台などを使用することもできる。
【0080】
また本実施の形態では、移載装置5と走行用モータ付き減速装置63で兼用する走行・移載用インバータ99を設けているが、移載装置5と走行用モータ付き減速装置63にそれぞれ専用のインバータを設けてもよい。
【0081】
【発明の効果】
以上述べたように本発明によれば、リターン側の昇降用索体は走行車体の中央部付近から昇降台の中央付近に案内されて連結され、昇降柱体から十分に離れて配置されることにより、走行車体の走行時にリターン側の昇降用索体が昇降柱体に干渉することを防止できる。
【図面の簡単な説明】
【図1】本発明の実施の形態におけるスタッカークレーンを備えた自動倉庫設備の斜視図である。
【図2】同スタッカークレーンの概略側面図である。
【図3】同スタッカークレーンの要部側面拡大図である。
【図4】同スタッカークレーンの下部正面および下部背面図である。
【図5】同スタッカークレーンの下部フレーム平面図である。
【図6】同スタッカークレーンの上部フレーム平面および側面および正面図である。
【図7】同スタッカークレーンの昇降用チェーンの張設状態を示す説明図である。
【図8】同スタッカークレーンのチェーンテンショナーの平面および側面図である。
【図9】同スタッカークレーンの走行駆動部側面および背面図である。
【図10】同スタッカークレーンの車輪ユニットの平面および側面図である。
【図11】同スタッカークレーンの駆動車輪ユニットの断面図である。
【図12】同スタッカークレーンのトルクアームの側面および一部断面図である。
【図13】同スタッカークレーンのトルクアームの組立て図である。
【図14】同スタッカークレーンを備えた自動倉庫設備の制御構成図である。
【符号の説明】
FS 自動倉庫設備
A 保管棚
B 作業通路
C スタッカークレーン
D 物品保管部
E 搬入出部
F 物品
P パレット
1 走行レール
2 下部フレーム
3 昇降台
4 昇降マスト
5 フォーク装置
6 ガイドレール
7 上部フレーム
10 車輪ユニット
11 走行駆動装置
12 昇降駆動装置
13 制御盤
17 昇降用モータ付き減速装置
18 巻き取りスプロケット
20 昇降用チェーン
21,22,23,24,25 案内スプロケット
26 チェーンテンショナー
31 テンションスプリング
33 ドグ
34 チェーンボルト
36 リミットスイッチ
41 車輪
42 軸受
43 車輪ハウジング
50 車輪支持部
55 ガイドローラ
56 ローラブラケット
63 走行用モータ付き減速装置
64 トルクアーム
74 第1部材
77 第2部材
79 第3部材
80 ピン
92 バンパー
100 コントローラ
Claims (6)
- 軌道に沿って走行する走行車体と、物品を移載する移載装置を設けた昇降台と、前記走行車体に垂直方向に連結され前記昇降台を昇降自在に案内支持する前後一対の昇降柱体を備え、
前記物品を収納する複数の物品収納部と、所定の搬入出口との間で前記物品の搬送を行う物品搬送装置であって、
前記昇降台を、この昇降台の前後両側上部にその一端が連結された一対の昇降用索体にて吊下げ支持し、これら一対の昇降用索体を、索体の繰り出し駆動と巻き取り駆動を行う駆動輪体を介して前記走行車体の中央部付近まで案内し、前記一対の昇降用索体の他端を前記昇降台の中央付近に連結したこと
を特徴とする物品搬送装置。 - 前記昇降台に、前記一対の昇降用索体の張力を設定する張力設定装置を配置したこと
を特徴とする請求項1に記載の物品搬送装置。 - 前記張力設定装置として、
前記昇降用索体の張力を設定するバネ体を設け、
前記昇降台に、前記バネ体の伸びにより前記昇降用索体の異常を検出する異常検出手段を設けたこと
を特徴とする請求項2に記載の物品搬送装置。 - 前記張力設定装置として、
バネ体と、一端が前記昇降用索体の他端に連結され、他端が前記バネ体の一端に連結された移動体と、前記バネ体の他端に連結され、前記昇降用索体の張力を設定する設定治具と、前記移動体の移動位置により、前記昇降用索体の伸びの異常を検出し、前記昇降用索体が切れたことを検出する検出器を設けたこと
を特徴とする請求項2に記載の物品搬送装置。 - 前記駆動輪体を、前記走行車体の前後方向の端部に配置したこと
を特徴とする請求項1〜請求項4のいずれかに記載の物品搬送装置。 - 一方の昇降柱体の上部に、前記一対の昇降用索体の一方の索体を、前記昇降台の上部一端から水平方向へ案内する第1案内輪体を設け、
他方の昇降柱体の上部に、前記第1案内輪体から案内された一方の索体を下方へ案内し、前記一対の昇降用索体の他方の索体を前記昇降台の上部他端から下方へ案内する一対の第2案内輪体を設け、
前記他方の昇降柱体の下部に、前記第2案内輪体から案内された一対の昇降用索体を前記駆動輪体へ案内する一対の第3案内輪体を設け、
前記走行車体の中央部に、前記駆動輪体から案内された前記一対の昇降用索体を前記昇降台の中央下部に案内する一対の第4案内輪体を設けたこと
を特徴とする請求項5に記載の物品搬送装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003076668A JP2004284704A (ja) | 2003-03-20 | 2003-03-20 | 物品搬送装置 |
| US10/796,508 US20040228710A1 (en) | 2003-03-20 | 2004-03-09 | Article conveying apparatus |
| CN200410030151.8A CN1532124B (zh) | 2003-03-20 | 2004-03-19 | 物品输送装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003076668A JP2004284704A (ja) | 2003-03-20 | 2003-03-20 | 物品搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004284704A true JP2004284704A (ja) | 2004-10-14 |
Family
ID=33291617
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003076668A Pending JP2004284704A (ja) | 2003-03-20 | 2003-03-20 | 物品搬送装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20040228710A1 (ja) |
| JP (1) | JP2004284704A (ja) |
| CN (1) | CN1532124B (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008184280A (ja) * | 2007-01-30 | 2008-08-14 | Daifuku Co Ltd | 昇降装置 |
| JP2012193004A (ja) * | 2011-03-15 | 2012-10-11 | Daifuku Co Ltd | スタッカークレーンにおける昇降台昇降装置 |
| CN105858029A (zh) * | 2016-05-20 | 2016-08-17 | 九州通医药集团物流有限公司 | 一种用于穿梭车的提升机 |
| KR101765732B1 (ko) * | 2016-01-27 | 2017-08-07 | 이건희 | 이송 장치 |
| CN108263675A (zh) * | 2018-03-27 | 2018-07-10 | 瑞光(上海)电气设备有限公司 | 一种包装袋送袋装置 |
| CN113233166A (zh) * | 2021-05-13 | 2021-08-10 | 哈尔滨岛田大鹏工业股份有限公司 | 一种用于多种船用发动机缸体的推料输送装置 |
| KR102351483B1 (ko) * | 2021-05-04 | 2022-01-17 | 대양비엔티(주) | 승강식 작업대 |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7156582B2 (en) * | 2002-01-16 | 2007-01-02 | Angel Garcia Ballesteros | Inspectable tunnel for underground pipes and cables |
| JP2006076699A (ja) * | 2004-09-08 | 2006-03-23 | Daifuku Co Ltd | 物品搬送車 |
| JP4756371B2 (ja) * | 2006-09-05 | 2011-08-24 | 株式会社ダイフク | 物品収納設備 |
| US8033778B2 (en) * | 2007-02-01 | 2011-10-11 | Daifuku Co., Ltd. | Elevating conveyance device |
| CN101070116B (zh) * | 2007-06-14 | 2011-05-04 | 王树生 | 轮对立体存储库 |
| JP5278724B2 (ja) | 2007-07-26 | 2013-09-04 | 株式会社ダイフク | 物品収納設備 |
| US9221604B2 (en) | 2008-09-05 | 2015-12-29 | Daifuku Co., Ltd. | Article storage facility and method of operation therefor |
| HU229022B1 (hu) * | 2009-03-02 | 2013-07-29 | Antal Zombori | Tárolóberendezés raktározáshoz |
| TWI410364B (zh) * | 2009-07-02 | 2013-10-01 | Ihi Corp | 設有昇降機構之軌道行走台車 |
| JP5110051B2 (ja) * | 2009-07-21 | 2012-12-26 | 株式会社Ihi | 昇降機構付き軌道走行台車 |
| CA2838313C (en) * | 2011-09-28 | 2018-12-18 | Dematic Accounting Services Gmbh | Multi-tier automated warehouse |
| CN103851154A (zh) * | 2012-12-06 | 2014-06-11 | 苏州宏瑞达新能源装备有限公司 | 一直带配重块的链传动升降机构 |
| GB201502792D0 (en) * | 2015-02-19 | 2015-04-08 | Pare Andre | Storage rack systeme and method |
| JP6222135B2 (ja) * | 2015-02-25 | 2017-11-01 | 村田機械株式会社 | 自動倉庫 |
| WO2016191777A1 (de) * | 2015-05-29 | 2016-12-08 | Tgw Mechanics Gmbh | Transportfahrzeug und verfahren zum einlagern bzw. auslagern von stückgütern sowie lagersystem |
| CN104986694A (zh) * | 2015-07-23 | 2015-10-21 | 无锡中鼎物流设备有限公司 | 一种堆垛机紧凑式起升导向轮 |
| CN105083834A (zh) * | 2015-09-02 | 2015-11-25 | 广运机电(苏州)有限公司 | 一种多层穿梭车上的行走机构 |
| CN105109947A (zh) * | 2015-09-06 | 2015-12-02 | 广运机电(苏州)有限公司 | 一种多层穿梭车上的输送机构 |
| CN106144944A (zh) * | 2016-08-09 | 2016-11-23 | 无锡德林船舶设备有限公司 | 一种链条式载货提升机构 |
| CN106315101B (zh) * | 2016-09-13 | 2018-12-21 | 金华市新鑫机电设备有限公司 | 一种物品存取装置 |
| CN106477218B (zh) * | 2016-09-13 | 2018-12-21 | 金华市新鑫机电设备有限公司 | 一种物品存取装置 |
| CN106628775B (zh) * | 2016-09-13 | 2019-01-22 | 浙江源端网络科技有限公司 | 一种移动式物品存取装置 |
| CN106477481A (zh) * | 2016-12-19 | 2017-03-08 | 湖南顶立科技有限公司 | 一种吊装设备 |
| CN106966179B (zh) * | 2017-01-24 | 2019-08-16 | 山东华滋自动化技术股份有限公司 | 一种高速码垛收料装置 |
| IT201700010427A1 (it) * | 2017-01-31 | 2018-07-31 | Tor Mec Ambrosi S R L | Magazzino automatico modulare per lo stoccaggio di prodotti industriali |
| JP6729491B2 (ja) * | 2017-05-25 | 2020-07-22 | 株式会社ダイフク | 物品移載装置 |
| IT201700092004A1 (it) * | 2017-08-08 | 2019-02-08 | Thomas Ambrosi | Sistema di gestione automatico e modulare di colture idroponiche |
| CN107628578B (zh) * | 2017-11-09 | 2019-08-02 | 绍兴蓝之印家纺有限公司 | 地铁施工时使用的起吊设备 |
| US10703563B2 (en) * | 2017-11-10 | 2020-07-07 | Taiwan Semiconductor Manufacturing Co., Ltd. | Stocker |
| DE102018102752A1 (de) * | 2018-02-07 | 2019-08-08 | Dematic Gmbh | Heber mit mindestens einer vertikal verfahrbaren Hubplattform mit einem Riemenantrieb |
| CN108792383B (zh) * | 2018-04-17 | 2020-06-02 | 青岛海纳重工集团公司(原青岛铸造机械集团公司) | 一种智能化铸造模型仓库系统 |
| CN109279268A (zh) * | 2018-12-05 | 2019-01-29 | 大连英蕴科技有限公司 | 一种船舶内垂直升降机及方法 |
| CN110949932B (zh) * | 2020-01-01 | 2020-10-13 | 中工美(北京)供应链物流管理有限责任公司 | 一种物流快递件自动升降摆放架 |
| CN113104767A (zh) * | 2021-03-03 | 2021-07-13 | 中国十七冶集团有限公司 | 一种工程施工用物料升降台及使用方法 |
| CN113493083A (zh) * | 2021-07-30 | 2021-10-12 | 因格(苏州)智能技术有限公司 | 一种轻型立体仓库及物料自动存取方法 |
| NO347126B1 (en) * | 2021-11-16 | 2023-05-30 | Autostore Tech As | Lifting frame assembly with extendible and retractable guide members, container handling vehicle and storage system, and associated method. |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US940878A (en) * | 1909-02-03 | 1909-11-23 | John Reece Jones | Box-handling attachment for shelves. |
| US3881424A (en) * | 1968-06-14 | 1975-05-06 | Interlake Inc | Storage and retrieval arrangement |
| US3593823A (en) * | 1968-06-14 | 1971-07-20 | Interlake Steel Corp | Load carriers |
| US3662860A (en) * | 1970-05-28 | 1972-05-16 | Clark Equipment Co | Elevator vertical shift and lateral dolly control system |
| NL177098C (nl) * | 1972-07-01 | 1985-08-01 | Kito Kk | Opslagsysteem, alsmede rolbrug toe te passen bij het opslagsysteem. |
| US3891063A (en) * | 1972-11-15 | 1975-06-24 | Lucasey Manufacturing Corp | Portable elevator apparatus |
| US4252217A (en) * | 1978-02-28 | 1981-02-24 | Litton Systems, Inc. | Semi-automated warehousing system |
| CA2004852C (en) * | 1988-12-13 | 1994-05-10 | Alfred Reimer | Parking garage |
| US5199840A (en) * | 1990-08-01 | 1993-04-06 | John Castaldi | Automated storage and retrieval system |
| US5149241A (en) * | 1991-02-11 | 1992-09-22 | Eaton-Kenway, Inc. | Dual mast apparatus for storage and retrieval vehicles |
| KR100196671B1 (ko) * | 1992-12-24 | 1999-06-15 | 이도 스스므 | 보수용 승강체 부착 입출장치 |
| GB2293590B (en) * | 1993-03-01 | 1997-03-26 | Kawasaki Steel Co | A Stacker Crane having a Fork-lift Apparatus |
| US5839873A (en) * | 1996-03-28 | 1998-11-24 | Hk Systems, Inc. | Storage and retrieval machine with pre-tensioned shuttle guides |
| US5810540A (en) * | 1996-04-30 | 1998-09-22 | Castaldi; John | Automated storage and retrieval system and bin insertion/extraction mechanism therefor |
| US5915909A (en) * | 1997-11-17 | 1999-06-29 | Kardex Systems, Inc. | Automatic vertical storage and retrieval system |
| US6113336A (en) * | 1999-10-05 | 2000-09-05 | Chang; Tien-Sheng | Warehousing system having a conveying device for transferring articles between two levels of a multistory building |
| JP2004284702A (ja) * | 2003-03-20 | 2004-10-14 | Daifuku Co Ltd | 物品搬送装置 |
-
2003
- 2003-03-20 JP JP2003076668A patent/JP2004284704A/ja active Pending
-
2004
- 2004-03-09 US US10/796,508 patent/US20040228710A1/en not_active Abandoned
- 2004-03-19 CN CN200410030151.8A patent/CN1532124B/zh not_active Expired - Lifetime
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008184280A (ja) * | 2007-01-30 | 2008-08-14 | Daifuku Co Ltd | 昇降装置 |
| JP2012193004A (ja) * | 2011-03-15 | 2012-10-11 | Daifuku Co Ltd | スタッカークレーンにおける昇降台昇降装置 |
| KR101765732B1 (ko) * | 2016-01-27 | 2017-08-07 | 이건희 | 이송 장치 |
| CN105858029A (zh) * | 2016-05-20 | 2016-08-17 | 九州通医药集团物流有限公司 | 一种用于穿梭车的提升机 |
| CN108263675A (zh) * | 2018-03-27 | 2018-07-10 | 瑞光(上海)电气设备有限公司 | 一种包装袋送袋装置 |
| CN108263675B (zh) * | 2018-03-27 | 2024-04-02 | 瑞光(上海)电气设备有限公司 | 一种包装袋送袋装置 |
| KR102351483B1 (ko) * | 2021-05-04 | 2022-01-17 | 대양비엔티(주) | 승강식 작업대 |
| CN113233166A (zh) * | 2021-05-13 | 2021-08-10 | 哈尔滨岛田大鹏工业股份有限公司 | 一种用于多种船用发动机缸体的推料输送装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1532124B (zh) | 2010-09-29 |
| CN1532124A (zh) | 2004-09-29 |
| US20040228710A1 (en) | 2004-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004284704A (ja) | 物品搬送装置 | |
| JP2004284702A (ja) | 物品搬送装置 | |
| JP5282971B2 (ja) | 物品保管設備 | |
| JP5729570B2 (ja) | 搬送機構体 | |
| JP5598721B2 (ja) | 長尺物品用の搬送装置 | |
| KR950012649B1 (ko) | 물품의 저장설비 | |
| JP2009132510A (ja) | 荷台昇降式移載装置 | |
| JP5447941B2 (ja) | スタッカークレーン | |
| KR100591111B1 (ko) | 스태커 크레인 | |
| JP2009084006A (ja) | 自動倉庫 | |
| JP5293999B2 (ja) | スタッカークレーンと物品収納設備 | |
| JP4093091B2 (ja) | 物品搬送装置 | |
| JP3985704B2 (ja) | 物品搬送装置 | |
| JP4260729B2 (ja) | 機械式駐輪場 | |
| JP4314521B2 (ja) | 物品搬送装置 | |
| JP2002293409A (ja) | 物品保管設備 | |
| JP5170543B2 (ja) | スタッカークレーンと物品収納設備 | |
| KR100661098B1 (ko) | 스태커 크레인 및 스태커 크레인 시스템 | |
| JP3561819B2 (ja) | スタッカクレーンにおける保守用昇降機の落下防止装置 | |
| JPH11165812A (ja) | 物流倉庫設備の自動搬送装置 | |
| JP2003002409A (ja) | 自動倉庫 | |
| JP2012193004A (ja) | スタッカークレーンにおける昇降台昇降装置 | |
| JP2006213442A (ja) | 物品搬送設備 | |
| JP2696599B2 (ja) | 被搬送物吊り下げ装置付き搬送台車 | |
| JP2962106B2 (ja) | 吊下搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050121 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070419 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070515 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070717 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070925 |