JP2004237767A - 動力車両の変速装置 - Google Patents
動力車両の変速装置 Download PDFInfo
- Publication number
- JP2004237767A JP2004237767A JP2003026068A JP2003026068A JP2004237767A JP 2004237767 A JP2004237767 A JP 2004237767A JP 2003026068 A JP2003026068 A JP 2003026068A JP 2003026068 A JP2003026068 A JP 2003026068A JP 2004237767 A JP2004237767 A JP 2004237767A
- Authority
- JP
- Japan
- Prior art keywords
- transmission
- power
- toroidal
- vehicle speed
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
- Arrangement And Driving Of Transmission Devices (AREA)
- Control Of Transmission Device (AREA)
Abstract
【課題】車速設定が容易で動力伝達効率が高く、作業中に機体の暴走や油温上昇によるトラブルが少ない変速装置を提供する。
【解決手段】トロイダル型変速機8を有する動力車両1において、パワーローラ38の角度を制御する車速設定具7を設け、対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を機体が受けたときには4駆状態に切換え、同時にトロイダル型変速機8を車速減側に切換える。さらに、左右ローリング自在に連結した対地作業機85を水平姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能とする。トロイダル型変速機8のパワーローラ38制御用の油圧シリンダ40内に流出入する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる。
【選択図】 図3
【解決手段】トロイダル型変速機8を有する動力車両1において、パワーローラ38の角度を制御する車速設定具7を設け、対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を機体が受けたときには4駆状態に切換え、同時にトロイダル型変速機8を車速減側に切換える。さらに、左右ローリング自在に連結した対地作業機85を水平姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能とする。トロイダル型変速機8のパワーローラ38制御用の油圧シリンダ40内に流出入する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる。
【選択図】 図3
Description
【0001】
【発明の属する技術分野】
本発明は、トラクターや乗用芝刈機、乗用管理機等の動力車両の変速装置に利用できる。
【0002】
【従来の技術】
近年、トラクターや乗用芝刈機等の動力農機においても操作性や作業性の向上を図るために無段変速装置が搭載されつつある。
無段変速装置で一番手近な方法は2組の割プーリ間にベルトを巻き回してプーリの間隙を変えることによって出力プーリ側の変速を行なわせるものである(例えば、特許文献1参照)。
【0003】
また、ベルト伝動に変わるものとして静油圧式無段変速装置(所謂HST)を搭載したものも知られている(例えば、特許文献2参照)。
【0004】
【特許文献1】
特開平12−225863号公報(図4)
【特許文献2】
特開平12−16102号公報(図2)
【0005】
【発明が解決しようとする課題】
ところで、上記従来のトラクター等において、ベルト伝動では熱の問題が発生することがあり、高温になるとベルトの耐久性が低下することが多く、また、静油圧式無段変速装置の場合は伝動効率の点で機械式変速装置よりも劣るという欠点があった。
【0006】
【課題を解決するための手段】
この発明は、機械的伝動効率に優れ、そのうえ変速操作が簡単で農作業開始時には機体のダッシングを防止できると共に農作業中にあっては油温上昇による変速装置のトラブルを未然に防止でき、かつ水平制御も確実に行なえる動力車両を提供することを目的とする。
【0007】
このため、次のような技術的手段を講じた。
即ち、請求項1記載の本発明では、2駆4駆切換装置を備え、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、機体後部に装着した対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を機体が受けたときには前記2駆4駆切換装置を4駆側に切換え、さらに前記トロイダル型変速機8を車速減側に切換える制御手段95を設けたことを特徴とする動力車両の変速装置の構成とした。
【0008】
請求項2の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1の後部に対地作業機85を左右ローリング自在に連結し、本機側には機体の左右傾斜量を検出する傾斜センサ24と前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、対地作業機85を所定の傾斜姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能としたことを特徴とする動力車両の変速装置の構成とした。
【0009】
また、請求項3記載の発明では、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、前記トロイダル型変速機8のパワーローラ38制御用の油圧シリンダ40内に流出入する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる制御手段95を設けたことを特徴とする動力車両の変速装置の構成とした。
【0010】
【作用】
エンジン5の回転をトロイダル変速機8の入力軸34に伝えると入力ディスク35が回転駆動される。車速設定具7を操作すると出力ディスク37に対するパワーローラ38の傾斜角度が変更されて減速比が調節され、この伝動下手に設けられた遊星機構との差動により駆動車輪2,3の回転数が変更調節される。
【0011】
機体後部に連結した例えばロータリ耕耘装置のような作業機を着地させたときに作業機側から機体を前進させようとする大きな推進力を受けたときには前輪2にも動力が伝達される4駆状態となり、同時にコントローラからの指令により車速は減速される。
【0012】
そして、ロータリ耕耘装置を用いて水平制御を実行しながら耕耘作業を行なうとき水平制御用の油圧シリンダー21aに制御信号が出力されていると、トロイダル変速装置8による変速制御が一時的にカットされ、水平制御が優先される。また、パワーローラ38の傾きを調節する油圧シリンダ40内に流出入するオイルの温度が異常に高くなると速度を増速させる方向の変速制御は中断される。
【0013】
このような作用により、圃場の土が硬い場所であっても作業開始時に機体がダッシングする恐れがなく、耕耘作業は安全に、且つ効率的に行なえると共にロータリ耕耘装置を用いた水平制御は精度よく行なえるものである。
【0014】
【発明の実施の形態】
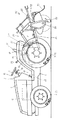
以下に、この発明の実施の形態について図面を参照しながら構成を説明する。図1の符号1は、この発明に係るトラクターを示しており、トラクター1は機体の下部四隅に駆動車輪としての前輪2,2と後輪3,3を備えている。
【0015】
機体前部のボンネット4内にはエンジン5が設けられ、エンジン5の回転動力をミッションケース6内のトロイダル変速装置8に伝達している。トロイダル変速装置8については後述する。
トラクター1の運転席11の前方には計器盤10とステアリングハンドル12と機体の進行方向を切換える前後進切換レバー19が設けられ、運転席11横の操作パネル14には車速設定具としてのダイヤル調整式つまみ7を設けている。このダイヤル調整式つまみ7に代えて従来周知のHSTペダルのような変速ペダル又はパワーシフトのように前後に操作して変速を行なう変速操作レバーを設けても良く、変速ペダルの場合はフロア17の右側に設け、変速操作レバーの場合には操作パネル14に前後方向に移動操作可能に設ける。車速設定具7はポテンショメータで構成されていて、操作量を電圧に換算して後述するコントローラ95に入力する。
【0016】
また、図2から明らかなように、フロア17の右側前部には左右独立したブレーキペダル9a,9bを設け、フロア17の左側前部にはクラッチペダル15を設けている。ブレーキ装置13は機体後部に左右設けられ、右ブレーキペダル9aを踏むと右側ブレーキ装置13aが作動し、左ブレーキペダル9bを踏むと左側ブレーキ装置13が作動する。
【0017】
また、ミッションケース6の後上部には油圧シリンダケース16が設けられ、この油圧シリンダケース16の左右両側にはリフトアーム18,18が回動自由に枢着されている。リフトアーム18,18と機体後下部に枢着したロワーリンク20,20との間にはリフトロッド21,21が介装連結されていて、これらのロワーリンク20,20とリフトロッド21,21とトップリンク22とにより作業機を連結する3点リンク機構23が構成されている。
【0018】
なお、この実施例では、右側のリフトロッドは油圧シリンダー21aで構成され、機体に搭載した傾斜センサー24の信号を受けて3点リンク機構23に連結された作業機85を設定された水平姿勢に制御するように構成している。
作業機の水平制御は従来周知の方法で行なわれ、作業機の左右ローリング角度を設定する傾斜設定器25と、機体の傾斜角度を検出する傾斜センサー24と、機体と作業機85との相対的角度差を検出するストロークセンサ26とにより油圧シリンダー21aの伸縮制御量がコントローラ95で算出され、常に機体が設定された左右傾斜姿勢になるようにコントロールされる。通常は作業機が水平状態になるように制御される。
【0019】
油圧操作レバー27を前後方向に回動操作することにより、油圧シリンダケース16内の油圧シリンダ(図示省略)に作動油が供給されて、あるいは排出されてリフトアーム18,18が昇降回動する。
次に図3に示す動力伝達線図について構成を説明する。
【0020】
エンジン5の回転動力は主クラッチ30を介して動力分配ギヤ32に伝達される。動力分配ギヤ32を固着支持している入力軸34には前後一対の入力ディスク35,35が一体的に設けられ、これらのディスク35,35に対向するように出力ディスク37,37が入力軸34の上に回転自在に遊嵌されている。
【0021】
符号38は入力ディスク35から出力ディスク37に動力を伝達するパワーローラで外周部が両デイスク35,37に常時接するように設けられ、油圧シリンダ40のピストンロッド(図示省略)によりその傾斜角度が適宜変更調節される。
【0022】
なお、前記入力ディスク35と出力ディスク37とパワーローラ38およびパワーローラ38の姿勢を変更する機構をまとめてバリエータVと呼ぶものとする。
入力ディスク35から出力ディスク37へ伝達される回転速度はパワーローラ38の傾斜角度によって変化する。符号39は入力ディスク35を外側から押圧してトルクを調節するトルク制御用ピストンである。油圧により作動し、このトルク制御用ピストン39を軸芯方向に押圧することにより伝達するトルクを加減できる。
【0023】
なお、パワーローラ38が相対的に高い半径位置で入力ディスク35に接すると共に、相対的に低い半径位置で出力ディスク37と接触すると出力ディスク37の回転数は増加し、反対にパワーローラ38が相対的に低い半径位置で入力ディスク35に接すると共に、相対的に高い半径位置で出力ディスク37と接触すると出力ディスク37の回転数は減少する。
【0024】
出力ディスク37にはこれと一体で出力スプロケット41が設けられ、前記入力軸34と平行に設けられた出力軸44上に遊嵌されたカウンタ軸45に固着の入力スプロケット46との間にチェン48が介装されている。
なお、これら出力スプロケット41、入力スプロケット46、チェン48を一組のプーリとベルトからなるベルト伝動機構(図示省略)によって構成しても良い。
【0025】
前記カウンタ軸45の前端にはサンギヤ49が固着され、後端には高速時に入り状態になる高速用油圧クラッチ50が設けられている。
サンギヤ49は遊星ギヤ52と噛み合い、更にこの遊星ギヤ52はインターナルギヤ54と常時噛み合う。
【0026】
インターナルギヤ54は出力軸44と一体的に固着されると共に、遊星ギヤ52を支えるキャリヤ55は低速側の油圧クラッチ58と一体化されている。
また、この低速側の油圧クラッチ58の入力側にはギヤ60が一体的に固着されており、このギヤ60は前記動力分配ギヤ32と常時噛み合っている。
【0027】
従って、低速側油圧クラッチ58が接続されているときには、動力分配ギヤ32からの回転動力がキャリヤ55に支持された遊星ギヤ52に伝達され、一方、バリエータVを介して減速された回転動力がサンギヤ49に伝達され、キャリヤ55及びサンギヤ52の噛み合いによる合成した回転動力がインターナルギヤ54を介して出力軸44に伝達されるように構成している。
【0028】
このようにバリエータVによる増減速操作によって出力軸44には前進から後進までの回転が無段階で取れるようになっている。なお、バリエータVの増減速、言い換えるとパワーローラ38,38の角度調整は、ダイヤル調整式つまみ7によって行なわれるものである(変速ペダル又は変速操作レバーであってもよい)。
【0029】
変速ペダルの場合、変速ペダルを前進側に踏み込むと出力軸44の回転は正転方向(前進側)に回転し、反対に後進側に踏み込むと出力軸44は逆転方向(後進側)に回転して機体を後退させるように構成している。
変速ペダルに代えて変速操作レバーを設けた場合も同様で、変速操作レバーを前方に倒せばその倒し角度に略比例して機体は前進速度を増大させ、逆に変速操作レバーを後方に倒せばそれに応じて後進速度が増大するように構成している。
【0030】
ダイヤル調整式つまみ7の場合には、これを一方の側に回すと前進速が得られ、反対方向に回すと後進速が得られる。前進、後進共に停止位置(中立位置)からつまみ7を大きく回す程進行速度が増大するようにしている。
そして、変速ペダル、変速操作レバー、ダイヤル式調整つまみ7いずれの場合にあっても、車速が速くなると自動的に低速側油圧クラッチ58が切れて高速側油圧クラッチ50が入り、従って、遊星ギヤ機構を全く介さないで高速の回転がギヤ62,63,64,65を順次介して出力軸44に伝達されるようにしている。これらの制御はコントローラ95からの指令によって行なわれる。
【0031】
なお、図3において、符号67は後輪デフ装置、68は最終減速ギヤ機構、70は前輪駆動系に動力を伝える前輪駆動ギヤ、74は前輪増速装置、76は前輪デフ装置である。
前輪増速装置74は従来周知の構造であるため、詳細な説明は省略するが、ステアリングハンドル12を略直進方向に維持して作業をしているときは等速クラッチ74aが接続されて前輪2と後輪3の回転周速が略等しくなり、畦際等でステアリングハンドル12を回動操作したときには増速クラッチ74bが接続されて前輪2の周速が後輪3の周速の約2倍程度に増速されて前輪2が速く回されるように構成している。
【0032】
なお、前輪増速装置74を構成する等速クラッチ74aと増速クラッチ74bは油圧方式のため、いずれも作動させない2輪駆動(後輪のみ駆動)の状態も作り出せ、この実施例では走行モード設定器72を適宜切替えて前後輪の駆動形態を変更するようにしている。したがって、走行モード設定器72を路上走行モードにすると如何なる場合も後輪3しか駆動されず、走行モード設定器72を作業モードに切替えると直進中は等速クラッチ74aが作動して4輪駆動状態になり、旋回時に操舵角センサ93がONになると増速クラッチ74bが作動する。なお、前述の説明から明らかなように、この実施例では、前輪増速装置74が2駆4駆切換装置を兼ねる構成としている。この実施例のような前輪増速装置によらず単純な油圧クラッチを介装して2駆と4駆の切換えを行なうように構成してもよい。
【0033】
図3において、PTO駆動系について説明すると、動力分配ギヤ32の回転はPTO駆動軸75上のPTO入力ギヤ77に伝達され、更にPTOクラッチ78、PTO変速装置80を順次介して機体後部に設けられたPTO軸82に伝達される。PTOクラッチ78は油圧方式であり、ステアリングハンドル12あるいは運転席11の近傍に設けたスイッチを押すことにより走行系とは独立して動力を入切できる。
【0034】
次にトラクター1の後部に連結されたロータリ耕耘装置85の構成を説明すると、ロータリ耕耘装置85は耕耘軸86とこの耕耘軸86に取り付けられた耕耘爪87とこれらの上方を覆う耕耘カバー88と後部カバー89等からなり、本機側に設けた耕深設定器90で設定した耕耘深さとなるように油圧昇降機構が制御される。このため、ロータリ耕耘装置85側には耕深センサ92が設けられ、この耕深センサ92は耕耘カバー88の後部に取り付けられ、後部カバー89の揺動角を耕深変化として捉えるようにしている。後述するが、前記耕深設定器90による設定値と耕深センサ92による検出値が常時比較され、設定耕深となうようにコントローラ95から油圧昇降装置の上昇用比例弁96と下降用比例弁97に対して制御指令が出される。
【0035】
図4は本願発明に係る制御系のブロック図であり、構成を説明すると、マイコンからなるコントローラ95の入力側には前記耕深設定器90と耕深センサ92と車速設定器7が接続されている。ここで云う車速設定器7は前述の通り変速ペダル又は変速操作レバー又はダイヤル調整式つまみであり、これらのうちの1つがコントローラ95に接続されてバリエータの一部を構成する油圧シリンダ40を制御する。変速制御に必要な車速センサー73も接続されている。
【0036】
その他、前後進切換レバー19の切換位置を検出する前後進切換スイッチ94、操舵角センサー93、走行モード設定器72、傾斜センサー24、傾斜設定器25、ストロークセンサー26、機体のダッシングを感知する衝撃感知センサー98、パワーローラ38作動用オイルの油温感知センサー99がコントローラ95の入力側に接続されている。
【0037】
一方、コントローラ95の出力側にはパワーローラ38の傾き調節用油圧シリンダ40を伸縮させる伸長用ソレノイド40aと短縮用ソレノイド40bが接続され、さらにリフトアーム18を昇降回動させる上昇用比例弁96と下降用比例弁97が接続され、これら以外に前輪増速用ソレノイド101と等速用ソレノイド102が接続されている。
【0038】
次に作用を説明する。
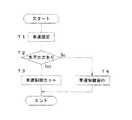
前記コントローラ95を搭載したトラクター1を用いて耕耘作業を行なう場合には、図5に示すように、まず、車速設定具7で耕耘作業速度を決定し(ステップS1)、ロータリ耕耘装置85に動力を伝達させた状態で作業機を着地させる。このとき、圃場が硬い場合には回転する耕耘爪87により機体全体が前方に大きく飛び出すほどの推進力を受けることになるが、このような場合には衝撃感知センサー98がONとなり(ステップS2)、2駆4駆切換装置を兼ねる前輪増速装置74が等速側に切換えられ、同時にトロイダル変速装置8が車速低側に切換えられる(ステップS3,S4)。
【0039】
このため、前輪2と後輪3に同時に動力が伝達される状態になり、前輪2が後輪3に対してブレーキとなると共に、車速も減速されるので機体の飛び出しが防止される。
そして、ロータリ耕耘装置85を着地後、水平制御機構を働かせて耕耘作業を行なうと、トラクター1の左右ローリングに拘わらずロータリ耕耘装置85を常時水平に維持すべく油圧シリンダ21aが伸縮作動してロータリ耕耘装置85が左右水平姿勢に維持される。
【0040】
水平制御中は、同時にトラクター1の車速を設定された車速に維持する車速制御も行なわれているのであるが、パワーローラ38に対する制御出力とロータリ耕耘装置85に対する水平制御出力が同時に出たときには、図6のフローチャートに示すように水平制御が優先され、車速を維持するために必要なパワーローラ38に対する制御出力は一時的にカットされる。
【0041】
この発明では、作業機が水平に復帰してから車速制御を実行させるものであるから、耕耘跡が美麗であり、後工程で実施される畦立作業や播種作業等に支障を与えることがない。
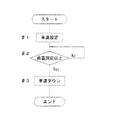
また、作業中にパワーローラ38伸縮制御用の油圧オイルの温度が異常に高くなると、トロイダル変速装置8の作動異常を招く恐れがあるが、この発明では図7のフローチャートに示すように、油温が設定された温度を越えて異常に高くなる場合にはその作動に制限を加える方向の制御が実施される。この発明では、車速を増速する方向にパワーローラ38の傾きが修正される制御は許可されず、減速方向のみ可能になるように制御される。したがって、油温がさらに上昇してトロイダル変速装置8が異常を起こす不具合が回避されるものである。
【0042】
なお、図示は省略するが、前述のトラクター1において、坂道での機体の暴走を防止するために機体が停止したときに前後輪2,3にトルクのみ伝わるギヤードニュートラル状態を作り出すようにバリエータのトルク制御用ピストン39を制御することも可能である。この場合には、前後進切換レバー19を中立にしたとき、あるいはクラッチペダル15かブレーキペダル9を踏み込んだときに前記トルク制御用ピストン39を作動させて出力ディスク37を押さえつけるようにする。このようにすることによって、例えばクラッチペダル15を長時間踏み続けていても機体が坂道を暴走するようなことはない。
【0043】
【発明の効果】
本発明は、以上説明したような形態で実施され、以下に記載されるような効果を奏する。
即ち、請求項1記載の発明では、2駆4駆切換装置を備え、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、機体後部に装着した対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を受けたときには前記2駆4駆切換装置を4駆側に切換え、さらに前記トロイダル型変速機8を車速減側に切換える制御手段を設けたので、硬い圃場で機体がダッシングするような危険性がなく安全に作業を行なえる。
【0044】
また、請求項2の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1の後部に対地作業機を左右ローリング自在に連結し、本機側には機体の左右傾斜量を検出する傾斜センサと前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、対地作業機を所定の姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能としたので、作業精度が向上し、耕耘跡を美麗にすることができる。
【0045】
また、請求項3の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、前記トロイダル型変速機8のパワーローラ38を制御する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる制御手段を設けたので、負荷が増大し続けることによるトロイダル型変速機8の機械的トラブルを避けることができる。
【図面の簡単な説明】
【図1】トラクターとロータリ耕耘装置の側面図である。
【図2】トラクターの平面図である。
【図3】動力伝達線図である。
【図4】制御ブロック図である。
【図5】フローチャートである。
【図6】フローチャートである。
【図7】フローチャートである。
【符号の説明】
1 トラクター
2 前輪
3 後輪
4 ボンネット
5 エンジン
6 ミッションケース
7 車速設定具(ダイヤル調整式つまみ)
8 トロイダル変速装置
9 ブレーキペダル
10 計器盤
11 運転席
12 ステアリングハンドル
14 操作パネル
15 クラッチペダル
19 前後進切換レバー
24 傾斜センサ
38 パワーローラ
40 油圧シリンダ
85 対地作業機(ロータリ耕耘装置)
95 制御手段(コントローラ)
【発明の属する技術分野】
本発明は、トラクターや乗用芝刈機、乗用管理機等の動力車両の変速装置に利用できる。
【0002】
【従来の技術】
近年、トラクターや乗用芝刈機等の動力農機においても操作性や作業性の向上を図るために無段変速装置が搭載されつつある。
無段変速装置で一番手近な方法は2組の割プーリ間にベルトを巻き回してプーリの間隙を変えることによって出力プーリ側の変速を行なわせるものである(例えば、特許文献1参照)。
【0003】
また、ベルト伝動に変わるものとして静油圧式無段変速装置(所謂HST)を搭載したものも知られている(例えば、特許文献2参照)。
【0004】
【特許文献1】
特開平12−225863号公報(図4)
【特許文献2】
特開平12−16102号公報(図2)
【0005】
【発明が解決しようとする課題】
ところで、上記従来のトラクター等において、ベルト伝動では熱の問題が発生することがあり、高温になるとベルトの耐久性が低下することが多く、また、静油圧式無段変速装置の場合は伝動効率の点で機械式変速装置よりも劣るという欠点があった。
【0006】
【課題を解決するための手段】
この発明は、機械的伝動効率に優れ、そのうえ変速操作が簡単で農作業開始時には機体のダッシングを防止できると共に農作業中にあっては油温上昇による変速装置のトラブルを未然に防止でき、かつ水平制御も確実に行なえる動力車両を提供することを目的とする。
【0007】
このため、次のような技術的手段を講じた。
即ち、請求項1記載の本発明では、2駆4駆切換装置を備え、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、機体後部に装着した対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を機体が受けたときには前記2駆4駆切換装置を4駆側に切換え、さらに前記トロイダル型変速機8を車速減側に切換える制御手段95を設けたことを特徴とする動力車両の変速装置の構成とした。
【0008】
請求項2の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1の後部に対地作業機85を左右ローリング自在に連結し、本機側には機体の左右傾斜量を検出する傾斜センサ24と前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、対地作業機85を所定の傾斜姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能としたことを特徴とする動力車両の変速装置の構成とした。
【0009】
また、請求項3記載の発明では、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、前記トロイダル型変速機8のパワーローラ38制御用の油圧シリンダ40内に流出入する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる制御手段95を設けたことを特徴とする動力車両の変速装置の構成とした。
【0010】
【作用】
エンジン5の回転をトロイダル変速機8の入力軸34に伝えると入力ディスク35が回転駆動される。車速設定具7を操作すると出力ディスク37に対するパワーローラ38の傾斜角度が変更されて減速比が調節され、この伝動下手に設けられた遊星機構との差動により駆動車輪2,3の回転数が変更調節される。
【0011】
機体後部に連結した例えばロータリ耕耘装置のような作業機を着地させたときに作業機側から機体を前進させようとする大きな推進力を受けたときには前輪2にも動力が伝達される4駆状態となり、同時にコントローラからの指令により車速は減速される。
【0012】
そして、ロータリ耕耘装置を用いて水平制御を実行しながら耕耘作業を行なうとき水平制御用の油圧シリンダー21aに制御信号が出力されていると、トロイダル変速装置8による変速制御が一時的にカットされ、水平制御が優先される。また、パワーローラ38の傾きを調節する油圧シリンダ40内に流出入するオイルの温度が異常に高くなると速度を増速させる方向の変速制御は中断される。
【0013】
このような作用により、圃場の土が硬い場所であっても作業開始時に機体がダッシングする恐れがなく、耕耘作業は安全に、且つ効率的に行なえると共にロータリ耕耘装置を用いた水平制御は精度よく行なえるものである。
【0014】
【発明の実施の形態】
以下に、この発明の実施の形態について図面を参照しながら構成を説明する。図1の符号1は、この発明に係るトラクターを示しており、トラクター1は機体の下部四隅に駆動車輪としての前輪2,2と後輪3,3を備えている。
【0015】
機体前部のボンネット4内にはエンジン5が設けられ、エンジン5の回転動力をミッションケース6内のトロイダル変速装置8に伝達している。トロイダル変速装置8については後述する。
トラクター1の運転席11の前方には計器盤10とステアリングハンドル12と機体の進行方向を切換える前後進切換レバー19が設けられ、運転席11横の操作パネル14には車速設定具としてのダイヤル調整式つまみ7を設けている。このダイヤル調整式つまみ7に代えて従来周知のHSTペダルのような変速ペダル又はパワーシフトのように前後に操作して変速を行なう変速操作レバーを設けても良く、変速ペダルの場合はフロア17の右側に設け、変速操作レバーの場合には操作パネル14に前後方向に移動操作可能に設ける。車速設定具7はポテンショメータで構成されていて、操作量を電圧に換算して後述するコントローラ95に入力する。
【0016】
また、図2から明らかなように、フロア17の右側前部には左右独立したブレーキペダル9a,9bを設け、フロア17の左側前部にはクラッチペダル15を設けている。ブレーキ装置13は機体後部に左右設けられ、右ブレーキペダル9aを踏むと右側ブレーキ装置13aが作動し、左ブレーキペダル9bを踏むと左側ブレーキ装置13が作動する。
【0017】
また、ミッションケース6の後上部には油圧シリンダケース16が設けられ、この油圧シリンダケース16の左右両側にはリフトアーム18,18が回動自由に枢着されている。リフトアーム18,18と機体後下部に枢着したロワーリンク20,20との間にはリフトロッド21,21が介装連結されていて、これらのロワーリンク20,20とリフトロッド21,21とトップリンク22とにより作業機を連結する3点リンク機構23が構成されている。
【0018】
なお、この実施例では、右側のリフトロッドは油圧シリンダー21aで構成され、機体に搭載した傾斜センサー24の信号を受けて3点リンク機構23に連結された作業機85を設定された水平姿勢に制御するように構成している。
作業機の水平制御は従来周知の方法で行なわれ、作業機の左右ローリング角度を設定する傾斜設定器25と、機体の傾斜角度を検出する傾斜センサー24と、機体と作業機85との相対的角度差を検出するストロークセンサ26とにより油圧シリンダー21aの伸縮制御量がコントローラ95で算出され、常に機体が設定された左右傾斜姿勢になるようにコントロールされる。通常は作業機が水平状態になるように制御される。
【0019】
油圧操作レバー27を前後方向に回動操作することにより、油圧シリンダケース16内の油圧シリンダ(図示省略)に作動油が供給されて、あるいは排出されてリフトアーム18,18が昇降回動する。
次に図3に示す動力伝達線図について構成を説明する。
【0020】
エンジン5の回転動力は主クラッチ30を介して動力分配ギヤ32に伝達される。動力分配ギヤ32を固着支持している入力軸34には前後一対の入力ディスク35,35が一体的に設けられ、これらのディスク35,35に対向するように出力ディスク37,37が入力軸34の上に回転自在に遊嵌されている。
【0021】
符号38は入力ディスク35から出力ディスク37に動力を伝達するパワーローラで外周部が両デイスク35,37に常時接するように設けられ、油圧シリンダ40のピストンロッド(図示省略)によりその傾斜角度が適宜変更調節される。
【0022】
なお、前記入力ディスク35と出力ディスク37とパワーローラ38およびパワーローラ38の姿勢を変更する機構をまとめてバリエータVと呼ぶものとする。
入力ディスク35から出力ディスク37へ伝達される回転速度はパワーローラ38の傾斜角度によって変化する。符号39は入力ディスク35を外側から押圧してトルクを調節するトルク制御用ピストンである。油圧により作動し、このトルク制御用ピストン39を軸芯方向に押圧することにより伝達するトルクを加減できる。
【0023】
なお、パワーローラ38が相対的に高い半径位置で入力ディスク35に接すると共に、相対的に低い半径位置で出力ディスク37と接触すると出力ディスク37の回転数は増加し、反対にパワーローラ38が相対的に低い半径位置で入力ディスク35に接すると共に、相対的に高い半径位置で出力ディスク37と接触すると出力ディスク37の回転数は減少する。
【0024】
出力ディスク37にはこれと一体で出力スプロケット41が設けられ、前記入力軸34と平行に設けられた出力軸44上に遊嵌されたカウンタ軸45に固着の入力スプロケット46との間にチェン48が介装されている。
なお、これら出力スプロケット41、入力スプロケット46、チェン48を一組のプーリとベルトからなるベルト伝動機構(図示省略)によって構成しても良い。
【0025】
前記カウンタ軸45の前端にはサンギヤ49が固着され、後端には高速時に入り状態になる高速用油圧クラッチ50が設けられている。
サンギヤ49は遊星ギヤ52と噛み合い、更にこの遊星ギヤ52はインターナルギヤ54と常時噛み合う。
【0026】
インターナルギヤ54は出力軸44と一体的に固着されると共に、遊星ギヤ52を支えるキャリヤ55は低速側の油圧クラッチ58と一体化されている。
また、この低速側の油圧クラッチ58の入力側にはギヤ60が一体的に固着されており、このギヤ60は前記動力分配ギヤ32と常時噛み合っている。
【0027】
従って、低速側油圧クラッチ58が接続されているときには、動力分配ギヤ32からの回転動力がキャリヤ55に支持された遊星ギヤ52に伝達され、一方、バリエータVを介して減速された回転動力がサンギヤ49に伝達され、キャリヤ55及びサンギヤ52の噛み合いによる合成した回転動力がインターナルギヤ54を介して出力軸44に伝達されるように構成している。
【0028】
このようにバリエータVによる増減速操作によって出力軸44には前進から後進までの回転が無段階で取れるようになっている。なお、バリエータVの増減速、言い換えるとパワーローラ38,38の角度調整は、ダイヤル調整式つまみ7によって行なわれるものである(変速ペダル又は変速操作レバーであってもよい)。
【0029】
変速ペダルの場合、変速ペダルを前進側に踏み込むと出力軸44の回転は正転方向(前進側)に回転し、反対に後進側に踏み込むと出力軸44は逆転方向(後進側)に回転して機体を後退させるように構成している。
変速ペダルに代えて変速操作レバーを設けた場合も同様で、変速操作レバーを前方に倒せばその倒し角度に略比例して機体は前進速度を増大させ、逆に変速操作レバーを後方に倒せばそれに応じて後進速度が増大するように構成している。
【0030】
ダイヤル調整式つまみ7の場合には、これを一方の側に回すと前進速が得られ、反対方向に回すと後進速が得られる。前進、後進共に停止位置(中立位置)からつまみ7を大きく回す程進行速度が増大するようにしている。
そして、変速ペダル、変速操作レバー、ダイヤル式調整つまみ7いずれの場合にあっても、車速が速くなると自動的に低速側油圧クラッチ58が切れて高速側油圧クラッチ50が入り、従って、遊星ギヤ機構を全く介さないで高速の回転がギヤ62,63,64,65を順次介して出力軸44に伝達されるようにしている。これらの制御はコントローラ95からの指令によって行なわれる。
【0031】
なお、図3において、符号67は後輪デフ装置、68は最終減速ギヤ機構、70は前輪駆動系に動力を伝える前輪駆動ギヤ、74は前輪増速装置、76は前輪デフ装置である。
前輪増速装置74は従来周知の構造であるため、詳細な説明は省略するが、ステアリングハンドル12を略直進方向に維持して作業をしているときは等速クラッチ74aが接続されて前輪2と後輪3の回転周速が略等しくなり、畦際等でステアリングハンドル12を回動操作したときには増速クラッチ74bが接続されて前輪2の周速が後輪3の周速の約2倍程度に増速されて前輪2が速く回されるように構成している。
【0032】
なお、前輪増速装置74を構成する等速クラッチ74aと増速クラッチ74bは油圧方式のため、いずれも作動させない2輪駆動(後輪のみ駆動)の状態も作り出せ、この実施例では走行モード設定器72を適宜切替えて前後輪の駆動形態を変更するようにしている。したがって、走行モード設定器72を路上走行モードにすると如何なる場合も後輪3しか駆動されず、走行モード設定器72を作業モードに切替えると直進中は等速クラッチ74aが作動して4輪駆動状態になり、旋回時に操舵角センサ93がONになると増速クラッチ74bが作動する。なお、前述の説明から明らかなように、この実施例では、前輪増速装置74が2駆4駆切換装置を兼ねる構成としている。この実施例のような前輪増速装置によらず単純な油圧クラッチを介装して2駆と4駆の切換えを行なうように構成してもよい。
【0033】
図3において、PTO駆動系について説明すると、動力分配ギヤ32の回転はPTO駆動軸75上のPTO入力ギヤ77に伝達され、更にPTOクラッチ78、PTO変速装置80を順次介して機体後部に設けられたPTO軸82に伝達される。PTOクラッチ78は油圧方式であり、ステアリングハンドル12あるいは運転席11の近傍に設けたスイッチを押すことにより走行系とは独立して動力を入切できる。
【0034】
次にトラクター1の後部に連結されたロータリ耕耘装置85の構成を説明すると、ロータリ耕耘装置85は耕耘軸86とこの耕耘軸86に取り付けられた耕耘爪87とこれらの上方を覆う耕耘カバー88と後部カバー89等からなり、本機側に設けた耕深設定器90で設定した耕耘深さとなるように油圧昇降機構が制御される。このため、ロータリ耕耘装置85側には耕深センサ92が設けられ、この耕深センサ92は耕耘カバー88の後部に取り付けられ、後部カバー89の揺動角を耕深変化として捉えるようにしている。後述するが、前記耕深設定器90による設定値と耕深センサ92による検出値が常時比較され、設定耕深となうようにコントローラ95から油圧昇降装置の上昇用比例弁96と下降用比例弁97に対して制御指令が出される。
【0035】
図4は本願発明に係る制御系のブロック図であり、構成を説明すると、マイコンからなるコントローラ95の入力側には前記耕深設定器90と耕深センサ92と車速設定器7が接続されている。ここで云う車速設定器7は前述の通り変速ペダル又は変速操作レバー又はダイヤル調整式つまみであり、これらのうちの1つがコントローラ95に接続されてバリエータの一部を構成する油圧シリンダ40を制御する。変速制御に必要な車速センサー73も接続されている。
【0036】
その他、前後進切換レバー19の切換位置を検出する前後進切換スイッチ94、操舵角センサー93、走行モード設定器72、傾斜センサー24、傾斜設定器25、ストロークセンサー26、機体のダッシングを感知する衝撃感知センサー98、パワーローラ38作動用オイルの油温感知センサー99がコントローラ95の入力側に接続されている。
【0037】
一方、コントローラ95の出力側にはパワーローラ38の傾き調節用油圧シリンダ40を伸縮させる伸長用ソレノイド40aと短縮用ソレノイド40bが接続され、さらにリフトアーム18を昇降回動させる上昇用比例弁96と下降用比例弁97が接続され、これら以外に前輪増速用ソレノイド101と等速用ソレノイド102が接続されている。
【0038】
次に作用を説明する。
前記コントローラ95を搭載したトラクター1を用いて耕耘作業を行なう場合には、図5に示すように、まず、車速設定具7で耕耘作業速度を決定し(ステップS1)、ロータリ耕耘装置85に動力を伝達させた状態で作業機を着地させる。このとき、圃場が硬い場合には回転する耕耘爪87により機体全体が前方に大きく飛び出すほどの推進力を受けることになるが、このような場合には衝撃感知センサー98がONとなり(ステップS2)、2駆4駆切換装置を兼ねる前輪増速装置74が等速側に切換えられ、同時にトロイダル変速装置8が車速低側に切換えられる(ステップS3,S4)。
【0039】
このため、前輪2と後輪3に同時に動力が伝達される状態になり、前輪2が後輪3に対してブレーキとなると共に、車速も減速されるので機体の飛び出しが防止される。
そして、ロータリ耕耘装置85を着地後、水平制御機構を働かせて耕耘作業を行なうと、トラクター1の左右ローリングに拘わらずロータリ耕耘装置85を常時水平に維持すべく油圧シリンダ21aが伸縮作動してロータリ耕耘装置85が左右水平姿勢に維持される。
【0040】
水平制御中は、同時にトラクター1の車速を設定された車速に維持する車速制御も行なわれているのであるが、パワーローラ38に対する制御出力とロータリ耕耘装置85に対する水平制御出力が同時に出たときには、図6のフローチャートに示すように水平制御が優先され、車速を維持するために必要なパワーローラ38に対する制御出力は一時的にカットされる。
【0041】
この発明では、作業機が水平に復帰してから車速制御を実行させるものであるから、耕耘跡が美麗であり、後工程で実施される畦立作業や播種作業等に支障を与えることがない。
また、作業中にパワーローラ38伸縮制御用の油圧オイルの温度が異常に高くなると、トロイダル変速装置8の作動異常を招く恐れがあるが、この発明では図7のフローチャートに示すように、油温が設定された温度を越えて異常に高くなる場合にはその作動に制限を加える方向の制御が実施される。この発明では、車速を増速する方向にパワーローラ38の傾きが修正される制御は許可されず、減速方向のみ可能になるように制御される。したがって、油温がさらに上昇してトロイダル変速装置8が異常を起こす不具合が回避されるものである。
【0042】
なお、図示は省略するが、前述のトラクター1において、坂道での機体の暴走を防止するために機体が停止したときに前後輪2,3にトルクのみ伝わるギヤードニュートラル状態を作り出すようにバリエータのトルク制御用ピストン39を制御することも可能である。この場合には、前後進切換レバー19を中立にしたとき、あるいはクラッチペダル15かブレーキペダル9を踏み込んだときに前記トルク制御用ピストン39を作動させて出力ディスク37を押さえつけるようにする。このようにすることによって、例えばクラッチペダル15を長時間踏み続けていても機体が坂道を暴走するようなことはない。
【0043】
【発明の効果】
本発明は、以上説明したような形態で実施され、以下に記載されるような効果を奏する。
即ち、請求項1記載の発明では、2駆4駆切換装置を備え、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、機体後部に装着した対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を受けたときには前記2駆4駆切換装置を4駆側に切換え、さらに前記トロイダル型変速機8を車速減側に切換える制御手段を設けたので、硬い圃場で機体がダッシングするような危険性がなく安全に作業を行なえる。
【0044】
また、請求項2の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1の後部に対地作業機を左右ローリング自在に連結し、本機側には機体の左右傾斜量を検出する傾斜センサと前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、対地作業機を所定の姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能としたので、作業精度が向上し、耕耘跡を美麗にすることができる。
【0045】
また、請求項3の発明は、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、前記トロイダル型変速機8のパワーローラ38を制御する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる制御手段を設けたので、負荷が増大し続けることによるトロイダル型変速機8の機械的トラブルを避けることができる。
【図面の簡単な説明】
【図1】トラクターとロータリ耕耘装置の側面図である。
【図2】トラクターの平面図である。
【図3】動力伝達線図である。
【図4】制御ブロック図である。
【図5】フローチャートである。
【図6】フローチャートである。
【図7】フローチャートである。
【符号の説明】
1 トラクター
2 前輪
3 後輪
4 ボンネット
5 エンジン
6 ミッションケース
7 車速設定具(ダイヤル調整式つまみ)
8 トロイダル変速装置
9 ブレーキペダル
10 計器盤
11 運転席
12 ステアリングハンドル
14 操作パネル
15 クラッチペダル
19 前後進切換レバー
24 傾斜センサ
38 パワーローラ
40 油圧シリンダ
85 対地作業機(ロータリ耕耘装置)
95 制御手段(コントローラ)
Claims (3)
- 2駆4駆切換装置を備え、エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、機体後部に装着した対地作業機を下降接地させた際に機体を前進させる所定以上の推進力を機体が受けたときには前記2駆4駆切換装置を4駆側に切換え、さらに前記トロイダル型変速機8を車速減側に切換える制御手段95を設けたことを特徴とする動力車両の変速装置。
- エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1の後部に対地作業機85を左右ローリング自在に連結し、本機側には機体の左右傾斜量を検出する傾斜センサ24と前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、対地作業機85を所定の傾斜姿勢に維持させるべく水平制御の出力が生じているときには、前記トロイダル型変速機8に対する変速制御を中断し、水平出力が停止した時点で変速制御を可能としたことを特徴とする動力車両の変速装置。
- エンジン5からの動力をミッションケース6内のトロイダル型変速機8に伝えて車輪2,3を駆動する動力車両1において、運転席11の近傍に前記トロイダル型変速機8のパワーローラ38の角度を制御する車速設定具7を設け、前記トロイダル型変速機8のパワーローラ38制御用の油圧シリンダ40内に流出入する油圧オイルの油温が所定値以上に上昇したときには車速上昇側の制御出力を一時的に停止させる制御手段95を設けたことを特徴とする動力車両の変速装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003026068A JP2004237767A (ja) | 2003-02-03 | 2003-02-03 | 動力車両の変速装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003026068A JP2004237767A (ja) | 2003-02-03 | 2003-02-03 | 動力車両の変速装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004237767A true JP2004237767A (ja) | 2004-08-26 |
Family
ID=32954185
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003026068A Pending JP2004237767A (ja) | 2003-02-03 | 2003-02-03 | 動力車両の変速装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004237767A (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006095720A1 (ja) * | 2005-03-07 | 2006-09-14 | Iseki & Co., Ltd. | 作業用車両 |
| JP2007170416A (ja) * | 2005-12-19 | 2007-07-05 | Iseki & Co Ltd | トロイダル無段変速式トラクター |
| JP2008032171A (ja) * | 2006-07-31 | 2008-02-14 | Iseki & Co Ltd | 作業車の無段変速制御装置 |
| JP2008032194A (ja) * | 2006-07-31 | 2008-02-14 | Iseki & Co Ltd | 作業車の無段変速制御装置 |
| JP2008543643A (ja) * | 2005-06-14 | 2008-12-04 | トロトラク・(ディヴェロプメント)・リミテッド | 自動車のための動力取り出し装置 |
| CN103958253A (zh) * | 2011-11-28 | 2014-07-30 | 卡特彼勒公司 | 机器动力传动系和方法 |
-
2003
- 2003-02-03 JP JP2003026068A patent/JP2004237767A/ja active Pending
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2006095720A1 (ja) * | 2005-03-07 | 2006-09-14 | Iseki & Co., Ltd. | 作業用車両 |
| EP1857714A1 (en) * | 2005-03-07 | 2007-11-21 | Iseki & Co., Ltd. | Work vehicle |
| US7832520B2 (en) | 2005-03-07 | 2010-11-16 | Iseki & Co., Ltd. | Work vehicle |
| EP1857714A4 (en) * | 2005-03-07 | 2011-06-01 | Iseki Agricult Mach | WORKING VEHICLE |
| JP2008543643A (ja) * | 2005-06-14 | 2008-12-04 | トロトラク・(ディヴェロプメント)・リミテッド | 自動車のための動力取り出し装置 |
| US8733191B2 (en) | 2005-06-14 | 2014-05-27 | Torotrak (Development) Limited | Power take off arrangement for a motor vehicle |
| JP2007170416A (ja) * | 2005-12-19 | 2007-07-05 | Iseki & Co Ltd | トロイダル無段変速式トラクター |
| JP4569461B2 (ja) * | 2005-12-19 | 2010-10-27 | 井関農機株式会社 | トロイダル無段変速式トラクター |
| JP2008032171A (ja) * | 2006-07-31 | 2008-02-14 | Iseki & Co Ltd | 作業車の無段変速制御装置 |
| JP2008032194A (ja) * | 2006-07-31 | 2008-02-14 | Iseki & Co Ltd | 作業車の無段変速制御装置 |
| CN103958253A (zh) * | 2011-11-28 | 2014-07-30 | 卡特彼勒公司 | 机器动力传动系和方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2567846B1 (en) | Hybrid working vehicle | |
| JP4858515B2 (ja) | 作業車両 | |
| JP2009040409A5 (ja) | ||
| JP2004237767A (ja) | 動力車両の変速装置 | |
| JP4300723B2 (ja) | トラクタ | |
| JP4487474B2 (ja) | 動力車両 | |
| JP2006304805A (ja) | 農作業機の操作装置 | |
| EP0850555B1 (en) | Operating device for a working vehicle | |
| JP2003129879A (ja) | トラクタの走行制御方法 | |
| JP4749762B2 (ja) | 乗用トラクタの走行速度制御装置 | |
| JP4249197B2 (ja) | 走行クローラの旋回機構 | |
| JP2004058947A (ja) | 動力車両の変速装置 | |
| JP4313802B2 (ja) | 走行クローラの制御機構 | |
| JPH0746091Y2 (ja) | 移動農機の操向装置 | |
| JP4329400B2 (ja) | 田植機 | |
| JP2950256B2 (ja) | 動力車両の操作レバー装置 | |
| JP2001122148A (ja) | 管理作業車 | |
| WO2024203636A1 (ja) | 作業車 | |
| JPH11315911A (ja) | 移動農機 | |
| JP4797599B2 (ja) | トロイダル無段変速式トラクタの変速制御装置 | |
| JP3635852B2 (ja) | 苗移植機 | |
| JP2006329235A (ja) | 走行車両 | |
| JP2003039964A (ja) | 動力車両の走行制御装置 | |
| JP4248714B2 (ja) | クローラ走行車 | |
| JPH11346513A (ja) | 田植機 |