JP2004106945A - 自動倉庫 - Google Patents
自動倉庫 Download PDFInfo
- Publication number
- JP2004106945A JP2004106945A JP2002267825A JP2002267825A JP2004106945A JP 2004106945 A JP2004106945 A JP 2004106945A JP 2002267825 A JP2002267825 A JP 2002267825A JP 2002267825 A JP2002267825 A JP 2002267825A JP 2004106945 A JP2004106945 A JP 2004106945A
- Authority
- JP
- Japan
- Prior art keywords
- stacker crane
- traveling
- stacker
- storage
- cranes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000001514 detection method Methods 0.000 claims description 9
- 230000000593 degrading effect Effects 0.000 abstract 1
- 238000000034 method Methods 0.000 description 7
- 238000013459 approach Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
Images


Landscapes
- Warehouses Or Storage Devices (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
【課題】大幅な収容効率の低下を招くことなく、効率的な入出庫作業が行える構成とされた自動倉庫を提供することを目的とする。
【解決手段】左右一対の収納棚1,2がスタッカークレーン側列と反スタッカークレーン側列の左右2列からなり、収納棚1,2と並行して2列の走行レール10,20が設けられると共に、各走行レール上を走行するスタッカークレーン11,21を備える。各スタッカークレーンには、当該スタッカークレーンに近い側の収納棚のスタッカークレーン側列と反スタッカークレーン側列とに入出庫可能であり、且つ遠い側の収納棚のスタッカークレーン側列に入出庫可能とされた、左右方向に進退動作するスライドフォーク15,25が設けられている。
【選択図】 図1
【解決手段】左右一対の収納棚1,2がスタッカークレーン側列と反スタッカークレーン側列の左右2列からなり、収納棚1,2と並行して2列の走行レール10,20が設けられると共に、各走行レール上を走行するスタッカークレーン11,21を備える。各スタッカークレーンには、当該スタッカークレーンに近い側の収納棚のスタッカークレーン側列と反スタッカークレーン側列とに入出庫可能であり、且つ遠い側の収納棚のスタッカークレーン側列に入出庫可能とされた、左右方向に進退動作するスライドフォーク15,25が設けられている。
【選択図】 図1
Description
【0001】
【発明の属する技術分野】
本発明は収納棚間を走行するスタッカークレーンを備える自動倉庫に関し、特には作業効率を向上させる技術に関する。
【0002】
【従来の技術】
従来の自動倉庫としては、対向配置された収納棚間に1台のスタッカークレーンを配し、このスタッカークレーンにより収納棚への入出庫作業を行うようにしたものが知られているが、より効率的に作業を行うために、例えば同一レール上を複数台のスタッカークレーンが走行するようにしたものや、収納棚の両側にそれぞれ1台ずつスタッカークレーンを有するもの等が提案されている(下記文献参照)。尚、同一レール上を複数台(例えば2台)のスタッカークレーンが走行する場合には、スタッカークレーン同士が衝突や追突を起こす危険性があることから、例えば下記文献に示すように、自車、他車それぞれの位置情報に基づいて走行を制御し衝突や追突を未然に防ぐことなどが行われている。
【0003】
又、作業の効率化を図るための別法として、収納棚の奥行方向に複数の物品を収納するようにし、多段階に進退動作するスライドフォークにて入出庫作業を行うようにした自動倉庫なども提案されている(下記文献参照)。
【0004】
【文献1】特開平10−152207号公報(第2頁、図1)
【文献2】実開平5−46805号公報(第4頁、図1)
【文献3】特許第2857836号公報(第2−4頁、図1−3)
【文献4】特開昭62−157102号公報(第3頁、図6−9)
【0005】
【発明が解決しようとする課題】
同一レール上を複数台のスタッカークレーンが走行するよう構成する場合には、入出庫ステーションを複数箇所に設けたり、入出庫ステーションが収納棚の一方にのみ設けられている自動倉庫では、スタッカークレーンとは別の搬送装置(レール台車)を設けたりしなければ作業効率を高めることができないため、実施する上での制約が大きいという問題がある。
【0006】
収納棚の両側をそれぞれ1台ずつのスタッカークレーンが走行するよう構成する場合には、入出庫ステーションが収納棚の一方にのみ設けられている自動倉庫であっても実施可能であるが、例えば左右一対の収納棚を有する自動倉庫では3台のスタッカークレーンを設置することになり、自動倉庫の収容効率が大幅に低下するという問題がある。
【0007】
本発明は、上記従来の技術の課題を解決するためのものであり、大幅な収容効率の低下を招くことなく容易に実施可能であり、且つ効率的な入出庫作業が行える構成とされた自動倉庫を提供することを目的とする。
【0008】
【課題を解決するための手段】
上記の目的を達成するため、本発明は、左右一対の収納棚間に、該収納棚と並行して複数列の走行レールが設けられると共に、各走行レール上に少なくとも1台のスタッカークレーンが備えられており、各スタッカークレーンには、左右の収納棚との間で物品の入出庫を行う、左右方向に進退動作可能なスライドフォークが設けられていることを特徴とする自動倉庫とする、という技術的手段を採用する。
【0009】
本発明によれば、複数列の走行レール上を走行する複数台のスタッカークレーンにより左右の収納棚への入出庫作業を行うことができるため、スタッカークレーンの台数に応じて搬送量が増大することになり、入出庫作業の効率を向上させることが可能となる。又、入出庫位置が収納棚の両端に配されている場合は勿論のこと、収納棚の一端のみに配されている場合にも適用でき、上記の優れた効果を得ることができる。但し、各走行レール上複数台のスタッカークレーンを備える構成とする際には、入出庫位置を収納棚の複数箇所に配することが好ましい。又更に、本発明によれば、上記の通り作業効率を高めながら、収納棚の両側にスタッカークレーンを設置する場合に比べ収容効率の低下を抑えることができるという効果が得られる。
【0010】
本発明において、収納棚が、スタッカークレーン側列と反スタッカークレーン側列の左右2列からなると共に、収納棚間には2列の走行レールが設けられている場合には、各走行レール上を走行するスタッカークレーンに、該スタッカークレーンが走行する走行レールに近い側の収納棚のスタッカークレーン側列と反スタッカークレーン側列とに入出庫可能であり、且つ遠い側の収納棚のスタッカークレーン側列に入出庫可能とされた、左右方向に進退動作するスライドフォークを設けるようにすることができる。
【0011】
このようにすれば、例えば左の収納棚に対し左のスタッカークレーンが入出庫を行っている最中に、右のスタッカークレーンにより左の収納棚のスタッカークレーン側列への入出庫を行うといったことが可能であり、入出庫作業の効率をすこぶる高めることができる。
【0012】
又、本発明において、各走行レール上を走行するスタッカークレーンの位置を検出する位置検出手段と、スライドフォークの作動状態を検出する状態検出手段と、位置検出手段及び状態検出手段の検出結果に基づきスタッカークレーンの走行を制御する走行制御手段と、を備え、走行制御手段が、隣り合う走行レール上のスタッカークレーンのそれぞれの位置から両スタッカークレーンの車間距離を導出すると共に、該車間距離が所定値以下であり、且つスライドフォークが車間距離導出の対象となるスタッカークレーン側へ進出している場合には、両スタッカークレーンが互いに近づく向きの走行を禁止する制御を行うようにすることができる。
【0013】
このようにすれば、隣り合う走行レール上のスタッカークレーン同士が衝突することを防止でき、安全に入出庫作業を行うことができる。ここで所定値は、例えばブレーキ装置によりスタッカークレーンを急停車させるために必要な制動距離よりも若干大きな値と設定することができ、又、スタッカークレーンの走行速度に応じて異なる値と設定することもできる。尚、スタッカークレーンの走行速度に応じて異なるよう設定された所定値に基づいた走行制御とすれば、必要以上に車間距離が確保されることがなくなるので、作業効率の低下を防止することができる。
【0014】
【発明の実施の形態】
以下、本発明の実施の形態について、図面に参照して詳細に説明する。尚、図1は本実施形態に係る自動倉庫の斜視図、図2は本実施形態に係るスタッカークレーンの斜視図、図3は本実施形態に係る自動倉庫の要部の機能ブロック図であり、図4は本実施形態に係る自動倉庫の制御フロー図である。又、図5及び図6は本実施形態に係る自動倉庫の稼動状況を示す概略平面図である。
【0015】
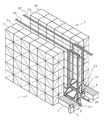
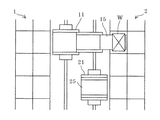
図1に示すように、本実施形態に係る自動倉庫は、物品を収納する収納部を上下方向、及び前後方向にそれぞれ多数備えた左右1対の収納棚1,2と、これら収納棚1,2の間に、収納棚1,2に並行して前後方向に設けられた走行レール10,20と、各走行レール上を走行するスタッカークレーン11,21とを備え、このスタッカクレーン11,21によって、収納棚1,2の前後方向一端側に設けられた左右1対の入出庫ステーション3,4と、収納棚1,2との間の物品の搬送が行われるようになっている。
【0016】
収納棚1(2)は、スタッカークレーン側列1a(2a)と反スタッカークレーン側列1b(2b)との左右2列の収納部を備えており、いずれの収納部もスタッカークレーン11,21の少なくとも一方による物品の入出庫が行えるよう、スタッカークレーン側に開口されて形成されている。尚、この実施例では、収納棚1,2のスタッカークレーン側列1a,2aの一端側に入出庫ステーション3,4が併設されているが、収納棚1,2の両端側に入出庫ステーションを設けるようにしても構わない。
【0017】
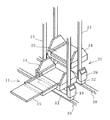
図2に示すように、スタッカークレーン11,21は、それぞれ主に走行レール10,20上を前後方向に走行するための台車12,22と、台車12,22に立設されたマスト13,23と、マスト13,23に案内されて上下方向に昇降自在とされた、物品を載置させるキャリッジ14,24とからなり、各キャリッジ14,24には、収納棚1,2の収納部、及び入出庫ステーション3,4との間で物品を受け渡しするための左右方向に進退動作可能なスライドフォーク15,25が備えられている。台車12,22には車輪を回転駆動させる走行モータ及びこの走行用モータに制動をかけるブレーキ装置を有する走行駆動装置16,26、及び昇降用モータを有する昇降駆動装置17,27が搭載され、キャリッジ14,24にはスライド用モータを有する進退駆動装置18,28が搭載されており、台車12,22には更にこれら各駆動装置を制御する制御装置19,29が搭載されている。そして、制御装置19,29により、走行駆動装置16,26が制御されて台車12,22は走行し、昇降駆動装置17,27が制御されてキャリッジ14,24は昇降し、進退駆動装置18,28が制御されてスライドフォーク15,25は進退する。
【0018】
ここで、スタッカークレーン11のスライドフォーク15は2段階に進退する構造とされており、スタッカークレーン11に近い側の収納棚である収納棚1のスタッカークレーン側列1a及び反スタッカークレーン側列1bの収納部と、スタッカークレーン11から遠い側の収納棚である収納棚2のスタッカークレーン側列2aの収納部と、入出庫ステーション3,4との間で物品の受け渡しが可能である。又、スタッカークレーン21のスライドフォーク25も同様に2段階に進退する構造とされており、スタッカークレーン21に近い側の収納棚である収納棚2のスタッカークレーン側列2a及び反スタッカークレーン側列2bの収納部と、スタッカークレーン21から遠い側の収納棚である収納棚1のスタッカークレーン側列1aの収納部と、入出庫ステーション3,4との間で物品の受け渡しが可能である。
【0019】
図3は本実施形態に係る自動倉庫の要部の機能ブロック図であり、この図3に示すように、上記スタッカクレーン11,21の台車12,22の走行、キャリッジ14,24の昇降、及びスライドフォーク15,25の進退動作は管理機5によって一括的に制御されるようになっており、管理機5からの動作指令信号が各スタッカークレーン11,21に搭載された制御装置19,29へと送信されると共に、各制御装置19,29が上記指令信号に基づいてスタッカークレーン11,21が備える走行駆動装置16,26、昇降駆動装置17,27、及び進退駆動装置18,28を制御する。又、台車12,22には、台車12,22に備えられた車輪の回転数を検出するエンコーダE1,E2がそれぞれ設けられ、またキャリッジ14,24には各スライドフォーク15,25が隣りのスタッカークレーン側へと進出するとオンされるようマイクロスイッチSW1,SW2がそれぞれ設けられおり、これらの検出信号が管理機5へ送信されるようになっている。尚、このようなマイクロスイッチSW1,SW2が、本発明におけるフォーク状態検出手段に相当する。
【0020】
管理機5は、作業者が入出庫の指示を行うために操作する操作パネル6と、操作パネル6によって入力される信号とエンコーダE1,E2及びマイクロスイッチSW1,SW2からの検出信号とに従って、以下に詳述する処理を行い動作指令信号を送信する演算装置7とを備えている。そして、作業者が操作パネル6を操作して、入庫/出庫と、入庫である場合には入出庫ステーション3,4のいすれから収納棚1,2の何処に物品を入庫するか、出庫である場合には収納棚1,2の何処に収納されている物品を入出庫ステーション3,4のいすれに出庫するか、といった指示を入力すると、この入力に従って、演算装置7が各スタッカークレーン11,21をどのように動作させるかを表す動作指令信号を各スタッカークレーン11,21へ送信する。尚、一連の入出庫作業が完了すると、演算装置7は各スタッカークレーン11,21へホームポジション、すなわち入出庫ステーション3,4の側方の待機位置に移動するよう動作指令信号を送信し、スタッカークレーン11,21をこのホームポジションで次の入出庫作業まで待機させるようになっている。
【0021】
次に、本実施形態に係る両スタッカークレーンの衝突を回避するための制御について、図4に示す制御フロー図並びに図5ないし図7に示す自動倉庫の稼動状況を示す概略平面図を参照して説明する。尚、説明上、スタッカークレーンが上記ホームポジションから遠ざかる方向をスタッカークレーンの前進方向、ホームポジションへ近付く方向を後進方向とする。
【0022】
管理機5の演算装置7は、先ずエンコーダE1,E2及びマイクロスイッチSW1,SW2からの検出信号を取込み(S1)、エンコーダE1,E2の検出信号に基づいて、各スタッカークレーン11,21のホームポジションを基準とした走行レール10,20上の位置L1,L2をそれぞれ導出し(S2)、導出した各位置から前後方向に両スタッカークレーン11,21が離間している距離(車間距離)を導出する(S3)。具体的には、演算装置7は、エンコーダE1,E2からの検出信号として入力される車輪の回転数に車輪の径を乗算して走行距離を求め、この走行距離を累算することによりホームポジションからの距離、つまり現在の位置を導出する。このような演算装置7による演算処理、並びに車輪の回転数を検出するエンコーダE1,E2により、本発明における位置検出手段が構成されている。そして、演算装置7は、各スタッカークレーン11,21のホームポジションからの距離の差を求めることで、両スタッカークレーン11,21の前後方向の車間距離を導出する。
【0023】
続いて、演算装置7は、導出された両スタッカークレーン11,21の車間距離が所定値L以下であるか否かを判断する(S4)。ここで所定値Lを、例えばブレーキ装置によりスタッカークレーンを急停車させるために必要な制動距離よりも若干大きな値と設定しておけば、車間距離が所定値L以下となった時点でブレーキ装置にて制動をかければ、衝突することなくスタッカークレーンを停車させることができることになる。S4において、両スタッカークレーン11,21の車間距離が所定値Lよりも大きいと判断されれば(S4のNO)、両スタッカークレーン11,21が衝突する恐れはないので、走行を禁止させることはせず、両スタッカークレーン11,21とも前後いずれの方向にも走行可能である。S4において、両スタッカークレーン11,21の車間距離が所定値L以下であると判断されれば(S4のYES)、マイクロスイッチSW1,SW2のいずれかがオンであるか否かが判断される(S5,S6)。
【0024】
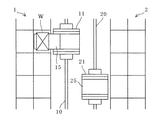
マイクロスイッチSW1,SW2のいずれもオンではないと判断されれば(S5のNO,S6のNO)、両スタッカークレーン11,21が衝突する恐れはないので、走行を禁止させることはせず、両スタッカークレーン11,21とも前後いずれの方向にも走行可能である。すなわち、例えば図5に示すように、スタッカークレーン11が停車しスタッカークレーン21とは反対側の収納棚1へスライドフォーク15を進出させて物品Wの入庫/出庫作業を行っている場合には、スタッカークレーン21をスタッカークレーン11へ近付くようと前進、或いは後進させることができる。スタッカークレーン11の横を通過させることもできるので、例えば図6に示すように、スタッカークレーン11が入出庫作業を行っている位置よりも更に前方位置でスタッカークレーン21を停車させ、収納棚1へスライドフォーク25を進出させて物品Wの入庫/出庫作業を行うことが可能である。又、スタッカークレーン11の横でスタッカークレーン21を停車させ、収納棚2へスライドフォーク25を進出させて入出庫作業を行うこともできる。
【0025】
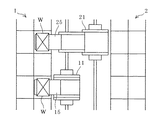
マイクロスイッチSW1,SW2のいずれか一方がオンであると判断されれば(S5のYES,S6のYES)、両スタッカークレーン11,21の位置L1,L2が比較される(S7)。スタッカークレーン11の位置L1がスタッカークレーン21の位置L2よりも遠ければ(S7のYES)、演算装置7は、両スタッカークレーンが互いに近付く向きの走行、すなわちスタッカークレーン11の後進とスタッカークレーン21の前進とを禁止する旨の指令信号を制御装置19,29へと送信する。そして、この指令信号に従って、制御装置19は走行駆動装置16がスタッカークレーン11を後進させるよう作動することを禁止し、制御装置29は走行駆動装置26がスタッカークレーン21を前進させるよう作動することを禁止する(S8)。走行駆動装置16が既にスタッカークレーン11を後進させるよう作動している、或いは走行駆動装置26が既にスタッカークレーン21を前進させるよう作動しているときには、制御装置19,29は各走行駆動装置が備えるブレーキ装置を作動させて、走行を停止させる。例えば図7に示すように、スタッカークレーン11が停車しスタッカークレーン21側の収納棚2へスライドフォーク15を進出させて物品Wの入庫/出庫作業を行っている場合には、スタッカークレーン21がスタッカークレーン11へと前進することが禁止され、仮にスタッカークレーン21が走行中であったとしても停車させられるので、両スタッカークレーン11,21の衝突が未然に防止される。又、スタッカークレーン11がスタッカークレーン21へと後進することも禁止されるので、上記のようにして停車したスタッカークレーン21に対しスライドフォーク15がキャリッジ14へ完全に収納されていない状態のスタッカークレーン11が衝突することも防止される。
【0026】
又、スタッカークレーン11の位置L1がスタッカークレーン21の位置L2よりも近ければ(S7のNO)、演算装置7は、両スタッカークレーンが互いに近付く向きの走行、すなわちスタッカークレーン11の前進とスタッカークレーン21の後進とを禁止する旨の指令信号を制御装置19,29へと送信する。そして、この指令信号に従って、制御装置19は走行駆動装置16がスタッカークレーン11を前進させるよう作動することを禁止し、制御装置29は走行駆動装置26がスタッカークレーン21を後進させるよう作動することを禁止する(S9)。走行駆動装置16が既にスタッカークレーン11を前進させるよう作動している、或いは走行駆動装置26が既にスタッカークレーン21を後進させるよう作動しているときには、制御装置19,29は各走行駆動装置が備えるブレーキ装置を作動させて、走行を停止させる。尚、以上で説明した演算装置7による車間距離の導出処理、並びに演算装置7、制御装置19,29によるスタッカークレーンの走行禁止に係る処理が、本発明における走行制御手段に相当する。
【0027】
このように、本実施形態によれば、2台のスタッカークレーン11,21により同時的に入出庫作業を行うことが可能であることから、スタッカークレーンが1台のみである場合よりも搬送量が増大し、入出庫作業の効率がすこぶる向上することとなると共に、両スタッカークレーン11,21が衝突することなく走行するよう制御されるので、安全に入出庫作業を行うことができる。しかも、2台のスタッカークレーン11,21は並走するように構成されていることから、入出庫ステーション3,4が収納棚1,2にのみ設けられている場合でも充分に作業効率が高められる。又、本実施形態では、収納棚1に2列(1a,1b)、収納棚2に2列(2a,2b)の計4列の収納部に対し、2列、各1台のスタッカークレーン11,21で物品の搬送を行うようにしているので、スタッカークレーンが2列で配設されることによる自動倉庫の収容効率の低下が抑えられている。
【0028】
本実施形態によれば、更に、左右一対の入出庫ステーション3,4が設けられていることから両入出庫ステーション3,4から同時に物品を入庫させたり、同時に物品を出庫させたり、一方で入庫し他方で出庫するといったことを同時に行わせたりすることができる。又、スタッカークレーン11と右の入出庫ステーション4、或いは右の収納棚2のスタッカークレーン側列2aとの間で物品の受け渡しをさせたり、スタッカークレーン21と左の入出庫ステーション3、或いは左の収納棚1のスタッカークレーン側列1aとの間で物品の受け渡しをさせたりすることができるので、極めて自由度の高い入出庫作業が可能であり、作業者は適切な方法(例えば、入出庫作業の所要時間が最小となる方法)で自動倉庫を運用することができる。
【0029】
【発明の効果】
本発明によれば、複数台のスタッカークレーンにより入出庫作業が行えることから、入出庫作業の効率をすこぶる高めることができ、しかも安全に自動倉庫を運用することが可能となる。
【図面の簡単な説明】
【図1】本発明に係る自動倉庫の斜視図である。
【図2】本発明に係るスタッカークレーンの斜視図である。
【図3】本発明に係る自動倉庫の要部の機能ブロック図である。
【図4】本発明に係る自動倉庫の制御フロー図である。
【図5】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【図6】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【図7】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【符号の説明】
1、2 収納棚
3、4 入出庫ステーション
5 管理機
10、20 走行レール
11、21 スタッカークレーン
15、25 スライドフォーク
19、29 制御装置
E1、E2 エンコーダ
SW1、SW2 マイクロスイッチ
【発明の属する技術分野】
本発明は収納棚間を走行するスタッカークレーンを備える自動倉庫に関し、特には作業効率を向上させる技術に関する。
【0002】
【従来の技術】
従来の自動倉庫としては、対向配置された収納棚間に1台のスタッカークレーンを配し、このスタッカークレーンにより収納棚への入出庫作業を行うようにしたものが知られているが、より効率的に作業を行うために、例えば同一レール上を複数台のスタッカークレーンが走行するようにしたものや、収納棚の両側にそれぞれ1台ずつスタッカークレーンを有するもの等が提案されている(下記文献参照)。尚、同一レール上を複数台(例えば2台)のスタッカークレーンが走行する場合には、スタッカークレーン同士が衝突や追突を起こす危険性があることから、例えば下記文献に示すように、自車、他車それぞれの位置情報に基づいて走行を制御し衝突や追突を未然に防ぐことなどが行われている。
【0003】
又、作業の効率化を図るための別法として、収納棚の奥行方向に複数の物品を収納するようにし、多段階に進退動作するスライドフォークにて入出庫作業を行うようにした自動倉庫なども提案されている(下記文献参照)。
【0004】
【文献1】特開平10−152207号公報(第2頁、図1)
【文献2】実開平5−46805号公報(第4頁、図1)
【文献3】特許第2857836号公報(第2−4頁、図1−3)
【文献4】特開昭62−157102号公報(第3頁、図6−9)
【0005】
【発明が解決しようとする課題】
同一レール上を複数台のスタッカークレーンが走行するよう構成する場合には、入出庫ステーションを複数箇所に設けたり、入出庫ステーションが収納棚の一方にのみ設けられている自動倉庫では、スタッカークレーンとは別の搬送装置(レール台車)を設けたりしなければ作業効率を高めることができないため、実施する上での制約が大きいという問題がある。
【0006】
収納棚の両側をそれぞれ1台ずつのスタッカークレーンが走行するよう構成する場合には、入出庫ステーションが収納棚の一方にのみ設けられている自動倉庫であっても実施可能であるが、例えば左右一対の収納棚を有する自動倉庫では3台のスタッカークレーンを設置することになり、自動倉庫の収容効率が大幅に低下するという問題がある。
【0007】
本発明は、上記従来の技術の課題を解決するためのものであり、大幅な収容効率の低下を招くことなく容易に実施可能であり、且つ効率的な入出庫作業が行える構成とされた自動倉庫を提供することを目的とする。
【0008】
【課題を解決するための手段】
上記の目的を達成するため、本発明は、左右一対の収納棚間に、該収納棚と並行して複数列の走行レールが設けられると共に、各走行レール上に少なくとも1台のスタッカークレーンが備えられており、各スタッカークレーンには、左右の収納棚との間で物品の入出庫を行う、左右方向に進退動作可能なスライドフォークが設けられていることを特徴とする自動倉庫とする、という技術的手段を採用する。
【0009】
本発明によれば、複数列の走行レール上を走行する複数台のスタッカークレーンにより左右の収納棚への入出庫作業を行うことができるため、スタッカークレーンの台数に応じて搬送量が増大することになり、入出庫作業の効率を向上させることが可能となる。又、入出庫位置が収納棚の両端に配されている場合は勿論のこと、収納棚の一端のみに配されている場合にも適用でき、上記の優れた効果を得ることができる。但し、各走行レール上複数台のスタッカークレーンを備える構成とする際には、入出庫位置を収納棚の複数箇所に配することが好ましい。又更に、本発明によれば、上記の通り作業効率を高めながら、収納棚の両側にスタッカークレーンを設置する場合に比べ収容効率の低下を抑えることができるという効果が得られる。
【0010】
本発明において、収納棚が、スタッカークレーン側列と反スタッカークレーン側列の左右2列からなると共に、収納棚間には2列の走行レールが設けられている場合には、各走行レール上を走行するスタッカークレーンに、該スタッカークレーンが走行する走行レールに近い側の収納棚のスタッカークレーン側列と反スタッカークレーン側列とに入出庫可能であり、且つ遠い側の収納棚のスタッカークレーン側列に入出庫可能とされた、左右方向に進退動作するスライドフォークを設けるようにすることができる。
【0011】
このようにすれば、例えば左の収納棚に対し左のスタッカークレーンが入出庫を行っている最中に、右のスタッカークレーンにより左の収納棚のスタッカークレーン側列への入出庫を行うといったことが可能であり、入出庫作業の効率をすこぶる高めることができる。
【0012】
又、本発明において、各走行レール上を走行するスタッカークレーンの位置を検出する位置検出手段と、スライドフォークの作動状態を検出する状態検出手段と、位置検出手段及び状態検出手段の検出結果に基づきスタッカークレーンの走行を制御する走行制御手段と、を備え、走行制御手段が、隣り合う走行レール上のスタッカークレーンのそれぞれの位置から両スタッカークレーンの車間距離を導出すると共に、該車間距離が所定値以下であり、且つスライドフォークが車間距離導出の対象となるスタッカークレーン側へ進出している場合には、両スタッカークレーンが互いに近づく向きの走行を禁止する制御を行うようにすることができる。
【0013】
このようにすれば、隣り合う走行レール上のスタッカークレーン同士が衝突することを防止でき、安全に入出庫作業を行うことができる。ここで所定値は、例えばブレーキ装置によりスタッカークレーンを急停車させるために必要な制動距離よりも若干大きな値と設定することができ、又、スタッカークレーンの走行速度に応じて異なる値と設定することもできる。尚、スタッカークレーンの走行速度に応じて異なるよう設定された所定値に基づいた走行制御とすれば、必要以上に車間距離が確保されることがなくなるので、作業効率の低下を防止することができる。
【0014】
【発明の実施の形態】
以下、本発明の実施の形態について、図面に参照して詳細に説明する。尚、図1は本実施形態に係る自動倉庫の斜視図、図2は本実施形態に係るスタッカークレーンの斜視図、図3は本実施形態に係る自動倉庫の要部の機能ブロック図であり、図4は本実施形態に係る自動倉庫の制御フロー図である。又、図5及び図6は本実施形態に係る自動倉庫の稼動状況を示す概略平面図である。
【0015】
図1に示すように、本実施形態に係る自動倉庫は、物品を収納する収納部を上下方向、及び前後方向にそれぞれ多数備えた左右1対の収納棚1,2と、これら収納棚1,2の間に、収納棚1,2に並行して前後方向に設けられた走行レール10,20と、各走行レール上を走行するスタッカークレーン11,21とを備え、このスタッカクレーン11,21によって、収納棚1,2の前後方向一端側に設けられた左右1対の入出庫ステーション3,4と、収納棚1,2との間の物品の搬送が行われるようになっている。
【0016】
収納棚1(2)は、スタッカークレーン側列1a(2a)と反スタッカークレーン側列1b(2b)との左右2列の収納部を備えており、いずれの収納部もスタッカークレーン11,21の少なくとも一方による物品の入出庫が行えるよう、スタッカークレーン側に開口されて形成されている。尚、この実施例では、収納棚1,2のスタッカークレーン側列1a,2aの一端側に入出庫ステーション3,4が併設されているが、収納棚1,2の両端側に入出庫ステーションを設けるようにしても構わない。
【0017】
図2に示すように、スタッカークレーン11,21は、それぞれ主に走行レール10,20上を前後方向に走行するための台車12,22と、台車12,22に立設されたマスト13,23と、マスト13,23に案内されて上下方向に昇降自在とされた、物品を載置させるキャリッジ14,24とからなり、各キャリッジ14,24には、収納棚1,2の収納部、及び入出庫ステーション3,4との間で物品を受け渡しするための左右方向に進退動作可能なスライドフォーク15,25が備えられている。台車12,22には車輪を回転駆動させる走行モータ及びこの走行用モータに制動をかけるブレーキ装置を有する走行駆動装置16,26、及び昇降用モータを有する昇降駆動装置17,27が搭載され、キャリッジ14,24にはスライド用モータを有する進退駆動装置18,28が搭載されており、台車12,22には更にこれら各駆動装置を制御する制御装置19,29が搭載されている。そして、制御装置19,29により、走行駆動装置16,26が制御されて台車12,22は走行し、昇降駆動装置17,27が制御されてキャリッジ14,24は昇降し、進退駆動装置18,28が制御されてスライドフォーク15,25は進退する。
【0018】
ここで、スタッカークレーン11のスライドフォーク15は2段階に進退する構造とされており、スタッカークレーン11に近い側の収納棚である収納棚1のスタッカークレーン側列1a及び反スタッカークレーン側列1bの収納部と、スタッカークレーン11から遠い側の収納棚である収納棚2のスタッカークレーン側列2aの収納部と、入出庫ステーション3,4との間で物品の受け渡しが可能である。又、スタッカークレーン21のスライドフォーク25も同様に2段階に進退する構造とされており、スタッカークレーン21に近い側の収納棚である収納棚2のスタッカークレーン側列2a及び反スタッカークレーン側列2bの収納部と、スタッカークレーン21から遠い側の収納棚である収納棚1のスタッカークレーン側列1aの収納部と、入出庫ステーション3,4との間で物品の受け渡しが可能である。
【0019】
図3は本実施形態に係る自動倉庫の要部の機能ブロック図であり、この図3に示すように、上記スタッカクレーン11,21の台車12,22の走行、キャリッジ14,24の昇降、及びスライドフォーク15,25の進退動作は管理機5によって一括的に制御されるようになっており、管理機5からの動作指令信号が各スタッカークレーン11,21に搭載された制御装置19,29へと送信されると共に、各制御装置19,29が上記指令信号に基づいてスタッカークレーン11,21が備える走行駆動装置16,26、昇降駆動装置17,27、及び進退駆動装置18,28を制御する。又、台車12,22には、台車12,22に備えられた車輪の回転数を検出するエンコーダE1,E2がそれぞれ設けられ、またキャリッジ14,24には各スライドフォーク15,25が隣りのスタッカークレーン側へと進出するとオンされるようマイクロスイッチSW1,SW2がそれぞれ設けられおり、これらの検出信号が管理機5へ送信されるようになっている。尚、このようなマイクロスイッチSW1,SW2が、本発明におけるフォーク状態検出手段に相当する。
【0020】
管理機5は、作業者が入出庫の指示を行うために操作する操作パネル6と、操作パネル6によって入力される信号とエンコーダE1,E2及びマイクロスイッチSW1,SW2からの検出信号とに従って、以下に詳述する処理を行い動作指令信号を送信する演算装置7とを備えている。そして、作業者が操作パネル6を操作して、入庫/出庫と、入庫である場合には入出庫ステーション3,4のいすれから収納棚1,2の何処に物品を入庫するか、出庫である場合には収納棚1,2の何処に収納されている物品を入出庫ステーション3,4のいすれに出庫するか、といった指示を入力すると、この入力に従って、演算装置7が各スタッカークレーン11,21をどのように動作させるかを表す動作指令信号を各スタッカークレーン11,21へ送信する。尚、一連の入出庫作業が完了すると、演算装置7は各スタッカークレーン11,21へホームポジション、すなわち入出庫ステーション3,4の側方の待機位置に移動するよう動作指令信号を送信し、スタッカークレーン11,21をこのホームポジションで次の入出庫作業まで待機させるようになっている。
【0021】
次に、本実施形態に係る両スタッカークレーンの衝突を回避するための制御について、図4に示す制御フロー図並びに図5ないし図7に示す自動倉庫の稼動状況を示す概略平面図を参照して説明する。尚、説明上、スタッカークレーンが上記ホームポジションから遠ざかる方向をスタッカークレーンの前進方向、ホームポジションへ近付く方向を後進方向とする。
【0022】
管理機5の演算装置7は、先ずエンコーダE1,E2及びマイクロスイッチSW1,SW2からの検出信号を取込み(S1)、エンコーダE1,E2の検出信号に基づいて、各スタッカークレーン11,21のホームポジションを基準とした走行レール10,20上の位置L1,L2をそれぞれ導出し(S2)、導出した各位置から前後方向に両スタッカークレーン11,21が離間している距離(車間距離)を導出する(S3)。具体的には、演算装置7は、エンコーダE1,E2からの検出信号として入力される車輪の回転数に車輪の径を乗算して走行距離を求め、この走行距離を累算することによりホームポジションからの距離、つまり現在の位置を導出する。このような演算装置7による演算処理、並びに車輪の回転数を検出するエンコーダE1,E2により、本発明における位置検出手段が構成されている。そして、演算装置7は、各スタッカークレーン11,21のホームポジションからの距離の差を求めることで、両スタッカークレーン11,21の前後方向の車間距離を導出する。
【0023】
続いて、演算装置7は、導出された両スタッカークレーン11,21の車間距離が所定値L以下であるか否かを判断する(S4)。ここで所定値Lを、例えばブレーキ装置によりスタッカークレーンを急停車させるために必要な制動距離よりも若干大きな値と設定しておけば、車間距離が所定値L以下となった時点でブレーキ装置にて制動をかければ、衝突することなくスタッカークレーンを停車させることができることになる。S4において、両スタッカークレーン11,21の車間距離が所定値Lよりも大きいと判断されれば(S4のNO)、両スタッカークレーン11,21が衝突する恐れはないので、走行を禁止させることはせず、両スタッカークレーン11,21とも前後いずれの方向にも走行可能である。S4において、両スタッカークレーン11,21の車間距離が所定値L以下であると判断されれば(S4のYES)、マイクロスイッチSW1,SW2のいずれかがオンであるか否かが判断される(S5,S6)。
【0024】
マイクロスイッチSW1,SW2のいずれもオンではないと判断されれば(S5のNO,S6のNO)、両スタッカークレーン11,21が衝突する恐れはないので、走行を禁止させることはせず、両スタッカークレーン11,21とも前後いずれの方向にも走行可能である。すなわち、例えば図5に示すように、スタッカークレーン11が停車しスタッカークレーン21とは反対側の収納棚1へスライドフォーク15を進出させて物品Wの入庫/出庫作業を行っている場合には、スタッカークレーン21をスタッカークレーン11へ近付くようと前進、或いは後進させることができる。スタッカークレーン11の横を通過させることもできるので、例えば図6に示すように、スタッカークレーン11が入出庫作業を行っている位置よりも更に前方位置でスタッカークレーン21を停車させ、収納棚1へスライドフォーク25を進出させて物品Wの入庫/出庫作業を行うことが可能である。又、スタッカークレーン11の横でスタッカークレーン21を停車させ、収納棚2へスライドフォーク25を進出させて入出庫作業を行うこともできる。
【0025】
マイクロスイッチSW1,SW2のいずれか一方がオンであると判断されれば(S5のYES,S6のYES)、両スタッカークレーン11,21の位置L1,L2が比較される(S7)。スタッカークレーン11の位置L1がスタッカークレーン21の位置L2よりも遠ければ(S7のYES)、演算装置7は、両スタッカークレーンが互いに近付く向きの走行、すなわちスタッカークレーン11の後進とスタッカークレーン21の前進とを禁止する旨の指令信号を制御装置19,29へと送信する。そして、この指令信号に従って、制御装置19は走行駆動装置16がスタッカークレーン11を後進させるよう作動することを禁止し、制御装置29は走行駆動装置26がスタッカークレーン21を前進させるよう作動することを禁止する(S8)。走行駆動装置16が既にスタッカークレーン11を後進させるよう作動している、或いは走行駆動装置26が既にスタッカークレーン21を前進させるよう作動しているときには、制御装置19,29は各走行駆動装置が備えるブレーキ装置を作動させて、走行を停止させる。例えば図7に示すように、スタッカークレーン11が停車しスタッカークレーン21側の収納棚2へスライドフォーク15を進出させて物品Wの入庫/出庫作業を行っている場合には、スタッカークレーン21がスタッカークレーン11へと前進することが禁止され、仮にスタッカークレーン21が走行中であったとしても停車させられるので、両スタッカークレーン11,21の衝突が未然に防止される。又、スタッカークレーン11がスタッカークレーン21へと後進することも禁止されるので、上記のようにして停車したスタッカークレーン21に対しスライドフォーク15がキャリッジ14へ完全に収納されていない状態のスタッカークレーン11が衝突することも防止される。
【0026】
又、スタッカークレーン11の位置L1がスタッカークレーン21の位置L2よりも近ければ(S7のNO)、演算装置7は、両スタッカークレーンが互いに近付く向きの走行、すなわちスタッカークレーン11の前進とスタッカークレーン21の後進とを禁止する旨の指令信号を制御装置19,29へと送信する。そして、この指令信号に従って、制御装置19は走行駆動装置16がスタッカークレーン11を前進させるよう作動することを禁止し、制御装置29は走行駆動装置26がスタッカークレーン21を後進させるよう作動することを禁止する(S9)。走行駆動装置16が既にスタッカークレーン11を前進させるよう作動している、或いは走行駆動装置26が既にスタッカークレーン21を後進させるよう作動しているときには、制御装置19,29は各走行駆動装置が備えるブレーキ装置を作動させて、走行を停止させる。尚、以上で説明した演算装置7による車間距離の導出処理、並びに演算装置7、制御装置19,29によるスタッカークレーンの走行禁止に係る処理が、本発明における走行制御手段に相当する。
【0027】
このように、本実施形態によれば、2台のスタッカークレーン11,21により同時的に入出庫作業を行うことが可能であることから、スタッカークレーンが1台のみである場合よりも搬送量が増大し、入出庫作業の効率がすこぶる向上することとなると共に、両スタッカークレーン11,21が衝突することなく走行するよう制御されるので、安全に入出庫作業を行うことができる。しかも、2台のスタッカークレーン11,21は並走するように構成されていることから、入出庫ステーション3,4が収納棚1,2にのみ設けられている場合でも充分に作業効率が高められる。又、本実施形態では、収納棚1に2列(1a,1b)、収納棚2に2列(2a,2b)の計4列の収納部に対し、2列、各1台のスタッカークレーン11,21で物品の搬送を行うようにしているので、スタッカークレーンが2列で配設されることによる自動倉庫の収容効率の低下が抑えられている。
【0028】
本実施形態によれば、更に、左右一対の入出庫ステーション3,4が設けられていることから両入出庫ステーション3,4から同時に物品を入庫させたり、同時に物品を出庫させたり、一方で入庫し他方で出庫するといったことを同時に行わせたりすることができる。又、スタッカークレーン11と右の入出庫ステーション4、或いは右の収納棚2のスタッカークレーン側列2aとの間で物品の受け渡しをさせたり、スタッカークレーン21と左の入出庫ステーション3、或いは左の収納棚1のスタッカークレーン側列1aとの間で物品の受け渡しをさせたりすることができるので、極めて自由度の高い入出庫作業が可能であり、作業者は適切な方法(例えば、入出庫作業の所要時間が最小となる方法)で自動倉庫を運用することができる。
【0029】
【発明の効果】
本発明によれば、複数台のスタッカークレーンにより入出庫作業が行えることから、入出庫作業の効率をすこぶる高めることができ、しかも安全に自動倉庫を運用することが可能となる。
【図面の簡単な説明】
【図1】本発明に係る自動倉庫の斜視図である。
【図2】本発明に係るスタッカークレーンの斜視図である。
【図3】本発明に係る自動倉庫の要部の機能ブロック図である。
【図4】本発明に係る自動倉庫の制御フロー図である。
【図5】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【図6】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【図7】本発明に係る自動倉庫の稼動状況を示す概略平面図である。
【符号の説明】
1、2 収納棚
3、4 入出庫ステーション
5 管理機
10、20 走行レール
11、21 スタッカークレーン
15、25 スライドフォーク
19、29 制御装置
E1、E2 エンコーダ
SW1、SW2 マイクロスイッチ
Claims (3)
- 左右一対の収納棚間に、該収納棚と並行して複数列の走行レールが設けられると共に、各走行レール上に少なくとも1台のスタッカークレーンが備えられており、各スタッカークレーンには、左右の収納棚との間で物品の入出庫を行う、左右方向に進退動作可能なスライドフォークが設けられていることを特徴とする自動倉庫。
- 収納棚が、スタッカークレーン側列と反スタッカークレーン側列の左右2列からなると共に、収納棚間には2列の走行レールが設けられ、
各走行レール上を走行するスタッカークレーンには、該スタッカークレーンが走行する走行レールに近い側の収納棚のスタッカークレーン側列と反スタッカークレーン側列とに入出庫可能であり、且つ遠い側の収納棚のスタッカークレーン側列に入出庫可能とされた、左右方向に進退動作するスライドフォークが設けられていることを特徴とする請求項1に記載の自動倉庫。 - 各スタッカークレーンの各走行レール上での位置を検出する位置検出手段と、各スライドフォークの作動状態を検出するフォーク状態検出手段と、位置検出手段及びフォーク状態検出手段の検出結果に基づきスタッカークレーンの走行を制御する走行制御手段と、を備え、
走行制御手段が、位置検出手段により検出される隣り合う走行レール上のスタッカークレーンそれぞれの位置から両スタッカークレーンの車間距離を導出すると共に、該車間距離が所定値以下であり、且つフォーク状態検出手段により一方のスタッカークレーンのスライドフォークが他方のスタッカークレーン側へ進出していることが検出される場合には、両スタッカークレーンが互いに近づく向きの走行を禁止する制御を行うことを特徴とする請求項1又は請求項2に記載の自動倉庫。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002267825A JP2004106945A (ja) | 2002-09-13 | 2002-09-13 | 自動倉庫 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002267825A JP2004106945A (ja) | 2002-09-13 | 2002-09-13 | 自動倉庫 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004106945A true JP2004106945A (ja) | 2004-04-08 |
Family
ID=32266215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002267825A Withdrawn JP2004106945A (ja) | 2002-09-13 | 2002-09-13 | 自動倉庫 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004106945A (ja) |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006001653A (ja) * | 2004-06-15 | 2006-01-05 | Ishikawajima Transport Machinery Co Ltd | 物品搬送装置のインターロックシステム |
| JP2009029568A (ja) * | 2007-07-26 | 2009-02-12 | Daifuku Co Ltd | 物品収納設備 |
| JP2009513457A (ja) * | 2005-07-19 | 2009-04-02 | キヴァ システムズ,インコーポレイテッド | 在庫目録品ホルダーを保管するための方法およびシステム |
| JP2010047336A (ja) * | 2008-08-19 | 2010-03-04 | Daifuku Co Ltd | スタッカークレーン及び物品収納設備 |
| WO2010026842A1 (ja) * | 2008-09-05 | 2010-03-11 | 株式会社ダイフク | 物品収納設備とその作動方法 |
| JP2010058956A (ja) * | 2008-09-05 | 2010-03-18 | Daifuku Co Ltd | 物品収納設備 |
| JP2010058957A (ja) * | 2008-09-05 | 2010-03-18 | Daifuku Co Ltd | 物品収納設備 |
| EP2330059A1 (de) * | 2009-12-02 | 2011-06-08 | Weets, Jakob | Vertikalförderer |
| US8036771B2 (en) | 2006-12-15 | 2011-10-11 | Murata Machinery, Ltd. | Transportation vehicle system and method of controlling transportation vehicle |
| JP2012148861A (ja) * | 2011-01-20 | 2012-08-09 | Univ Of Tokyo | 移動体システム |
| KR101236877B1 (ko) | 2005-05-27 | 2013-02-26 | 가부시키가이샤 다이후쿠 | 물품 수납 설비 |
| JP2013040052A (ja) * | 2012-11-30 | 2013-02-28 | Daifuku Co Ltd | 物品収納設備 |
| JP2013056779A (ja) * | 2012-12-28 | 2013-03-28 | Daifuku Co Ltd | 物品収納設備 |
| US8483869B2 (en) | 2005-07-19 | 2013-07-09 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| DE102012112828A1 (de) * | 2012-12-20 | 2014-06-26 | Witron Logistik + Informatik Gmbh | Lager und Lagerbediengeräte mit Passierfunktion |
| DE102013102994A1 (de) * | 2013-03-22 | 2014-09-25 | Witron Logistik + Informatik Gmbh | Lager und lagerbediengeräte mit passierfunktion |
| US9330373B2 (en) | 2005-07-19 | 2016-05-03 | Amazon Technologies, Inc. | Method and system for storing inventory holders |
| CN106429163A (zh) * | 2016-11-08 | 2017-02-22 | 苏州博达特机电科技有限公司 | 立体仓库 |
| JP2019006567A (ja) * | 2017-06-26 | 2019-01-17 | 株式会社ダイフク | 物品搬送設備、及び、物品搬送車 |
| WO2019111221A1 (en) * | 2017-12-07 | 2019-06-13 | Modula S.P.A. | A storage system |
| KR20200093191A (ko) * | 2019-01-28 | 2020-08-05 | 현대무벡스 주식회사 | 미니로더의 이동 제어 방법 |
| CN115158942A (zh) * | 2022-07-18 | 2022-10-11 | 广东顶固集创家居股份有限公司 | 一种货物出入库系统及控制方法 |
| EP4183716A1 (en) * | 2021-11-19 | 2023-05-24 | Fameccanica.Data S.p.A. | A method for automatically handling a plurality of product containers, and a related system |
| CN116674913A (zh) * | 2023-06-30 | 2023-09-01 | 广东安达智能装备股份有限公司 | 仓储物料存取系统 |
| WO2026016721A1 (zh) * | 2024-07-19 | 2026-01-22 | 深圳市库宝软件有限公司 | 搬运机器人及其取放货定位方法、仓储系统和存储介质 |
-
2002
- 2002-09-13 JP JP2002267825A patent/JP2004106945A/ja not_active Withdrawn
Cited By (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006001653A (ja) * | 2004-06-15 | 2006-01-05 | Ishikawajima Transport Machinery Co Ltd | 物品搬送装置のインターロックシステム |
| KR101236877B1 (ko) | 2005-05-27 | 2013-02-26 | 가부시키가이샤 다이후쿠 | 물품 수납 설비 |
| JP2009513457A (ja) * | 2005-07-19 | 2009-04-02 | キヴァ システムズ,インコーポレイテッド | 在庫目録品ホルダーを保管するための方法およびシステム |
| JP2009096637A (ja) * | 2005-07-19 | 2009-05-07 | Kiva Systems Inc | 在庫目録品ホルダーを保管するための方法およびシステム |
| US9582783B2 (en) | 2005-07-19 | 2017-02-28 | Amazon Technologies, Inc. | Method and system for storing inventory holders |
| US9330373B2 (en) | 2005-07-19 | 2016-05-03 | Amazon Technologies, Inc. | Method and system for storing inventory holders |
| US9090400B2 (en) | 2005-07-19 | 2015-07-28 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| US8626335B2 (en) | 2005-07-19 | 2014-01-07 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| US8483869B2 (en) | 2005-07-19 | 2013-07-09 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| US8036771B2 (en) | 2006-12-15 | 2011-10-11 | Murata Machinery, Ltd. | Transportation vehicle system and method of controlling transportation vehicle |
| JP2009029568A (ja) * | 2007-07-26 | 2009-02-12 | Daifuku Co Ltd | 物品収納設備 |
| JP2010047336A (ja) * | 2008-08-19 | 2010-03-04 | Daifuku Co Ltd | スタッカークレーン及び物品収納設備 |
| CN102143899A (zh) * | 2008-09-05 | 2011-08-03 | 株式会社大福 | 物品收纳设备及其动作方法 |
| TWI462861B (zh) * | 2008-09-05 | 2014-12-01 | Daifuku Kk | 物品收納設備 |
| WO2010026842A1 (ja) * | 2008-09-05 | 2010-03-11 | 株式会社ダイフク | 物品収納設備とその作動方法 |
| JP2010058956A (ja) * | 2008-09-05 | 2010-03-18 | Daifuku Co Ltd | 物品収納設備 |
| EP2332859A4 (en) * | 2008-09-05 | 2013-08-07 | Daifuku Kk | ARTICLE STORAGE DEVICE AND OPERATING METHOD THEREFOR |
| CN102143899B (zh) * | 2008-09-05 | 2013-12-04 | 株式会社大福 | 物品收纳设备及其动作方法 |
| US9221604B2 (en) | 2008-09-05 | 2015-12-29 | Daifuku Co., Ltd. | Article storage facility and method of operation therefor |
| JP2010058957A (ja) * | 2008-09-05 | 2010-03-18 | Daifuku Co Ltd | 物品収納設備 |
| EP2330059A1 (de) * | 2009-12-02 | 2011-06-08 | Weets, Jakob | Vertikalförderer |
| JP2012148861A (ja) * | 2011-01-20 | 2012-08-09 | Univ Of Tokyo | 移動体システム |
| JP2013040052A (ja) * | 2012-11-30 | 2013-02-28 | Daifuku Co Ltd | 物品収納設備 |
| DE102012112828A1 (de) * | 2012-12-20 | 2014-06-26 | Witron Logistik + Informatik Gmbh | Lager und Lagerbediengeräte mit Passierfunktion |
| JP2013056779A (ja) * | 2012-12-28 | 2013-03-28 | Daifuku Co Ltd | 物品収納設備 |
| DE102013102994A1 (de) * | 2013-03-22 | 2014-09-25 | Witron Logistik + Informatik Gmbh | Lager und lagerbediengeräte mit passierfunktion |
| CN106429163A (zh) * | 2016-11-08 | 2017-02-22 | 苏州博达特机电科技有限公司 | 立体仓库 |
| JP2019006567A (ja) * | 2017-06-26 | 2019-01-17 | 株式会社ダイフク | 物品搬送設備、及び、物品搬送車 |
| WO2019111221A1 (en) * | 2017-12-07 | 2019-06-13 | Modula S.P.A. | A storage system |
| KR20200093191A (ko) * | 2019-01-28 | 2020-08-05 | 현대무벡스 주식회사 | 미니로더의 이동 제어 방법 |
| KR102174172B1 (ko) * | 2019-01-28 | 2020-11-04 | 현대무벡스 주식회사 | 미니로더의 이동 제어 방법 |
| EP4183716A1 (en) * | 2021-11-19 | 2023-05-24 | Fameccanica.Data S.p.A. | A method for automatically handling a plurality of product containers, and a related system |
| CN115158942A (zh) * | 2022-07-18 | 2022-10-11 | 广东顶固集创家居股份有限公司 | 一种货物出入库系统及控制方法 |
| CN115158942B (zh) * | 2022-07-18 | 2025-01-10 | 广东顶固集创家居股份有限公司 | 一种货物出入库系统及控制方法 |
| CN116674913A (zh) * | 2023-06-30 | 2023-09-01 | 广东安达智能装备股份有限公司 | 仓储物料存取系统 |
| WO2026016721A1 (zh) * | 2024-07-19 | 2026-01-22 | 深圳市库宝软件有限公司 | 搬运机器人及其取放货定位方法、仓储系统和存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004106945A (ja) | 自動倉庫 | |
| JP4666213B2 (ja) | 物品収納設備 | |
| JP4232112B2 (ja) | 物品搬送設備 | |
| KR102463268B1 (ko) | 물품 반송 설비, 및 물품 반송차 | |
| JP4329034B2 (ja) | 物品搬送装置 | |
| TWI400187B (zh) | 物品收納設備及其控制方法 | |
| JP4971326B2 (ja) | 自動搬送車とワーク積載台車とによるワーク搬送設備システム | |
| JP2005089059A (ja) | 物品移載装置 | |
| JP4273423B2 (ja) | 搬送装置 | |
| KR102606070B1 (ko) | 이송 장치 및 그 제어 방법 | |
| WO2014092284A1 (ko) | 측면 이중 포크 캐리지형 무인운반차 | |
| JPH08324712A (ja) | 立体自動倉庫 | |
| JP4577554B2 (ja) | 搬送装置 | |
| JP5103714B2 (ja) | 搬送設備 | |
| JPH1159819A (ja) | 有軌道台車システム | |
| JPH11116005A (ja) | 自動倉庫システム | |
| KR100751567B1 (ko) | 전동랙 및 스태커 크레인을 이용한 입출고 장치 및 방법 | |
| JP6263416B2 (ja) | 駐車システムにおける搬送台車の停止方法 | |
| JP3596408B2 (ja) | 搬送装置 | |
| JP2003034406A (ja) | 工程間搬送システム | |
| JPH09216704A (ja) | 無人搬送車の停止装置 | |
| JP2007217076A (ja) | 搬送車 | |
| JP4844826B2 (ja) | 物品収納設備 | |
| JPH0412006Y2 (ja) | ||
| JPH02210169A (ja) | 駐車場設備の移載コンベヤ制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20060110 |