ES2833377T3 - Materiales marcadores y formas de localizar un marcador magnético - Google Patents
Materiales marcadores y formas de localizar un marcador magnético Download PDFInfo
- Publication number
- ES2833377T3 ES2833377T3 ES16728722T ES16728722T ES2833377T3 ES 2833377 T3 ES2833377 T3 ES 2833377T3 ES 16728722 T ES16728722 T ES 16728722T ES 16728722 T ES16728722 T ES 16728722T ES 2833377 T3 ES2833377 T3 ES 2833377T3
- Authority
- ES
- Spain
- Prior art keywords
- magnetic
- marker
- anisotropy
- susceptibility
- deployment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/43—Detecting, measuring or recording for evaluating the reproductive systems
- A61B5/4306—Detecting, measuring or recording for evaluating the reproductive systems for evaluating the female reproductive systems, e.g. gynaecological evaluations
- A61B5/4312—Breast evaluation or disorder diagnosis
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F1/00—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties
- H01F1/01—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials
- H01F1/03—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity
- H01F1/032—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of hard-magnetic materials
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F1/00—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties
- H01F1/01—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials
- H01F1/03—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity
- H01F1/12—Magnets or magnetic bodies characterised by the magnetic materials therefor; Selection of materials for their magnetic properties of inorganic materials characterised by their coercivity of soft-magnetic materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3904—Markers, e.g. radio-opaque or breast lesions markers specially adapted for marking specified tissue
- A61B2090/3908—Soft tissue, e.g. breast tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3925—Markers, e.g. radio-opaque or breast lesions markers ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3987—Applicators for implanting markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3995—Multi-modality markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0223—Magnetic field sensors
Abstract
Un marcador magnético para el marcaje de un sitio en un tejido del cuerpo, comprendiendo el marcador al menos un material magnéticamente blando que tiene una coercitividad magnética menor de 7,96 kA/m (100 Oe) con una susceptibilidad de la masa magnética de >0,05 m3 kg-1 y siendo elástica o flexiblemente deformable entre una configuración compactada no esférica antes del despliegue, que tiene un mayor cociente entre la respuesta magnética máxima y la respuesta magnética mínima (anisotropía de la susceptibilidad magnética) y una configuración desplegada descompactada después del despliegue, en donde el marcador tiene una menor anisotropía de la susceptibilidad magnética de menos de 5.
Description
DESCRIPCIÓN
Materiales marcadores y formas de localizar un marcador magnético
Solicitudes relacionadas
Esta solicitud reivindica prioridad respecto de la Solicitud de Patente Provisional de EE.UU. 62/170.768 presentada el 4 de junio de 2015.
Campo de la invención
La invención se refiere de forma general al campo de los marcadores magnéticos para la detección médica, y más específicamente a marcadores médicos magnéticos.
Antecedentes de la invención
Con la creciente prevalencia de los programas de detección sistemática por mamografía, la mayoría de los cánceres de mama se detectan como pequeñas lesiones no palpables (u ocultas) que son susceptibles de un tratamiento conservador de la mama. La localización exacta de los cánceres de mama no palpables es clave para permitir la eliminación quirúrgica del tumor completo con unos márgenes adecuados. Si el tumor no se extirpa completamente, es necesario que los pacientes experimenten una operación adicional para eliminar cualquier tejido canceroso residual. La localización exacta también ayuda a evitar la extirpación del exceso de tejido mamario que podría dar como resultado unos resultados cosméticos adversos. La localización exacta es necesaria en otros cánceres tales como colorrectal, de próstata y de pulmón, así como en otras afecciones conocidas por los expertos habituales en esta técnica.
El actual criterio de referencia para la localización de lesiones no palpables durante la cirugía es la localización guiada por hilo (WGL). Aunque esta técnica se usa ampliamente, la WGL tiene varios inconvenientes. En primer lugar, implica dos procedimientos individuales y puede presentar dificultades logísticas y de programación entre los departamentos de radiología y de cirugía. En segundo lugar, el posicionamiento del hilo de guía puede no ser óptimo para conseguir el resultado cosmético deseado en la posterior cirugía. En tercer lugar, el hilo de gancho puede migrar lejos del sitio de la lesión o quedar desplazado durante la mamografía o el movimiento del paciente. En cuarto lugar, la inserción del hilo puede ser dolorosa para los pacientes, y finalmente, el riesgo de infección significa que la cirugía debe tener lugar normalmente el mismo día que la inserción del hilo.
Con objeto de superar estos inconvenientes, se han desarrollado otras técnicas de localización. Una de dichas técnicas es la localización radioguiada de lesiones ocultas (Radioguided Occult Lesión Localization, ROLL) usando un radiomarcador inyectado en el tumor y detectado por una sonda gamma de mano. Aunque esto elimina la complejidad logística de la WGL, la técnica introduce el inconveniente del uso de materiales radioactivos, que requiere procedimientos especiales de manipulación y de eliminación.
También se usan marcadores magnéticos, y superan el inconveniente y los retos logísticos que aparecen por el uso de un material radioactivo como marcador, y también evitan los inconvenientes de los hilos de guía. Sin embargo, los marcadores magnéticos son relativamente complejos de fabricar en comparación con los hilos de guía.
Todos los dispositivos de marcaje conocidos, incluyendo los hilos de guía y los marcadores magnéticos, se introducen a través de una aguja hueca o cánula. Para minimizar el malestar del paciente, esta aguja tiene normalmente un diámetro estrecho. El pequeño diámetro de la aguja restringe la sección transversal del marcador. Para las agujas de biopsia convencionales, esta dimensión es generalmente de calibre 14 a 18. Esto significa que la aguja tiene generalmente un diámetro interno de 0,8 mm a 1,5 mm, pero posiblemente puede ser tan grande como de 1,8 mm para ciertos diseños de aguja. Si se usa una aguja al vacío, la dimensión de la aguja es normalmente de calibre 11, con un diámetro interno de 2,3 a 2,5 mm. Por lo tanto, los marcadores magnéticos normalmente están restringidos para que tengan menos de 1,5 mm de diámetro. En la práctica, estas restricciones de tamaño limitan la respuesta magnética, y a su vez, la facilidad con la que puede localizarse el marcador con una sonda magnética. Por tanto, se desea una respuesta magnética más fuerte.
Otro reto de los marcadores magnéticos para biopsias es que para conseguir una respuesta magnética eficaz, es necesario maximizar el volumen de material. Estas necesidades de volumen dan como resultado normalmente un marcador conformado que tiene una longitud significativamente mayor que su diámetro. Dichos marcadores están en la región de 1 mm a 12 mm, con un cociente entre longitud y diámetro mayor de 5. Este cociente de aspecto da como resultado una respuesta magnética no uniforme, obteniéndose una señal mucho más fuerte cuando el eje mayor del marcador está alineado con una sonda, y una señal más débil cuando el eje mayor del marcador es transversal a la sonda. Generalmente se desea una respuesta más uniforme.
Además, el marcador generalmente es guiado a su posición y confirmado en su sitio con ultrasonidos o imágenes estereotácticas por rayos X. Esto significa que es deseable que el marcador sea claramente visible bajo rayos X e
imágenes de ultrasonidos, y preferentemente con imágenes de RM, que también se pueden usarse para este fin.
Lo que se necesita es un marcador que tenga una pequeña cantidad de material sin reducir la intensidad de la señal detectable y que proporcione una respuesta más uniforme desde cualquier dirección relativa a la sonda magnética.
La presente invención aborda esta necesidad.
El documento US 2008/097199 A1 divulga un marcador para el marcaje de un sitio dentro del cuerpo de un paciente mamífero posicionado dentro del tejido de un paciente. El marcador puede colocarse en primera instancia mediante una aguja o similar, o colocarse donde se haya extraído una muestra de tejido. El marcador tiene una pluralidad de bucles, cada uno a diversos ángulos entre sí, de forma que cuando se posicionan dentro del paciente, uno de los bucles está posicionado octogonal al campo magnético de un detector de metales. Las técnicas de administración normales tales como agujas, catéteres o cánulas, pueden posicionar fácilmente el marcador dentro del paciente. El marcador se comprime en el interior de la cánula y el profesional lo posiciona. Después de salir de la cánula, el marcador se expande y se descomprime parcial o completamente. Después de la descompresión, el marcador mostrará una pluralidad de bucles, uno o más de los cuales estará posicionado ortogonal al campo del detector de metales.
El documento US 2006/079805 A1 divulga un marcador de un sitio intracorpóreo que está adaptado para ser implantado en una cavidad de biopsia, que incluye una pluralidad de globos o partículas. Los globos o las partículas están bien sinterizados entre sí o bien unidos entre sí. También se divulgan otras realizaciones alternativas marcadores de sitio visibles con diversos modos de obtención de imágenes.
Sumario de la invención
La presente invención se define por las características de la reivindicación independiente. Las realizaciones preferidas se proporcionan en las reivindicaciones dependientes.
La invención se refiere a marcadores magnéticos para uso quirúrgico. En particular, se refiere a marcadores magnéticos con una respuesta magnética más uniforme una vez desplegados de lo que se esperaría por su geometría antes del despliegue.
En un aspecto, se proporcionan marcadores cuya forma se elige de forma que proporcionen una respuesta magnética más uniforme.
En otro aspecto, se proporcionan marcadores cuya configuración geométrica cambia una vez desplegados, de forma que proporcionan una respuesta magnética más uniforme.
En otro aspecto, se proporcionan marcadores cuya composición del material se elige de forma que proporcionen una respuesta magnética más uniforme de lo que se esperaría por su geometría antes del despliegue.
En un aspecto, el marcador está en una configuración no esférica que tiene un cociente de anisotropía de la susceptibilidad magnética menor de 5. Una realización, el marcador está en una configuración no esférica que tiene un cociente de anisotropía de la susceptibilidad magnética menor de 3. En una realización, la configuración no esférica del marcador tiene la forma seleccionada del grupo que comprende un cilindro, un cable, una forma de "mancuerna", una microesfera y un ovillo. En otra realización, el cilindro se flexiona tras su colocación en el tejido. En otra realización más, la configuración no esférica es facetada.
En una realización, el marcador es un marcador magnético para el marcaje de un sitio en un tejido del cuerpo que comprende: una pluralidad de componentes magnéticos unidos por componentes no magnéticos flexibles que se compactan tras su colocación en el sitio. En otra realización, el marcador magnético para el marcaje de un sitio en un tejido del cuerpo incluye un componente magnético con una primera forma localizado dentro de una matriz no magnética con una segunda forma. En otra realización más, el marcador magnético para el marcaje de un sitio en un tejido del cuerpo incluye un núcleo de material magnético dentro de una vaina de material magnético. En otra realización más, uno del núcleo y la vaina es un material magnético blando.
En una realización, el marcador magnético para el marcaje de un sitio en un tejido del cuerpo incluye una pluralidad de componentes magnéticos que se autoensamblan en el marcador magnético después de la colocación de los marcadores en el cuerpo. En otra realización, cada componente magnético está encerrado dentro de un recubrimiento superhidrófobo. En otra realización más, el marcador magnético para el marcaje de un sitio en un tejido del cuerpo incluye un vidrio metálico magnético.
Breve descripción de los dibujos
La estructura y la función de la invención puede comprenderse mejor a partir de la descripción del presente documento, junto con las figuras adjuntas. Las figuras no están necesariamente a escala, poniéndose más bien el énfasis
generalmente en los principios ilustrativos. Las figuras deben considerarse ilustrativas en todos los aspectos y no pretenden limitar la invención, cuyo ámbito está definido únicamente por las reivindicaciones.
Las Figs. 1(A) y (B) son las curvas de magnetización de un material magnético blando y duro respectivamente;
La Fig. 2(A) es una gráfica de la influencia del ángulo de flexión del marcador sobre la anisotropía de la susceptibilidad de un marcador;
La Fig.2(B) es un diagrama de una realización de una configuración de análisis para medir la anisotropía magnética de un marcador;
La Fig.2(C) es una señal a una distancia constante con respecto a marcadores de hierro (99,5 %) de 5 mm con diversos ángulos inclusivos, donde 180 grados es un cilindro recto y 0 grados es en forma de U;
La Fig. 2(D) es una gráfica de una señal a una distancia constante con respecto a marcadores de acero inoxidable multisoporte de 7 mm con diversos ángulos inclusivos, donde 180 grados es un cilindro recto y 0 grados es en forma de U;
La Fig. 3(A) es un diagrama de una realización de la invención en forma de una "píldora" o una "microesfera";
Las Figs. 3(B) y (C) son secciones transversales de microesferas magnéticas con extremos conformados;
Las Figs. 4(A)-(D) son diagramas de realizaciones de la invención en forma de formas de "mancuerna";
Las Figs. 5(A) y (B) son diagramas de secciones transversales de realizaciones de la invención en forma de cable; Las Figs. 6(A) y 6(B) son diagramas de una realización de la invención en forma de un "ovillo";
La Fig. 7 es un diagrama de una realización de la invención en forma de a "farolillo chino";
Las Figs. 8 (A)-(G) son diagramas de realizaciones de la invención con enlaces de bisagra;
La Fig. 9 es una colección de diagramas de secciones transversales de realizaciones de marcadores de la invención con unos números de facetas crecientes;
La Fig.10 es un diagrama de la sección transversal de una realización de la invención en forma de núcleo y vaina; La Fig. 11 es un diagrama del dibujo de una realización de la invención que tiene una vaina y múltiples núcleos; Las Figs. 12(A) y (B) son diagramas de realizaciones de la invención como marcadores segmentados;
Las Figs. 13 (A), (B) y (C) son diagramas de realizaciones de la invención en los que la forma del material magnético y la forma externa del marcador son diferentes;
Las Figs. 14 (A)-(E) son diagramas de realizaciones de la invención en forma de marcadores conformados con bisagras hechas de diversos materiales;
La Fig. 15 es un diagrama de una realización de la invención construida por autoensamblaje;
La Fig. 16 es un diagrama de una realización de la invención construida por autoensamblaje hidrófobo;
Las Figs. 17 (A) y (B) son diagramas de otras realizaciones de la invención construidas por autoensamblaje;
La Fig. 18 es un diagrama de una realización de dos marcadores entrelazados con forma de U.
Descripción de las realizaciones preferidas
En la Patente de EE.UU. n° 6.173.715 se describe un método para fabricar marcadores magnéticos como imanes permanentes. Los implantes de imanes permanentes tienen el inconveniente de que atraerán cualquier material magnético que esté en las proximidades, y por lo tanto podrían interactuar indeseablemente con otros implantes o moverse en el tejido, por ejemplo, cuando haya cerca una herramienta quirúrgica hecha de un material magnético.
En la Publicación de EE.UU. n° 2014/0314679 se describe un método para fabricar marcadores formados a partir de nanopartículas de óxido de hierro superparamagnético (SPIO) en una forma bioabsorbible. Las partículas de SPIO evitan los problemas que se producen con los marcadores magnéticos permanentes, debido a que dichos materiales no tienen remanencia magnética y no son magnéticos por sí mismos, sino que únicamente se magnetizan cuando
están en presencia de un campo magnético. La detección y localización de estos marcadores magnéticos de SPIO puede realizarse con un magnetómetro sensible (o susceptómetro) que genera un campo magnético alterno que excita magnéticamente el marcador y detecta la firma del campo magnético generado por el marcador, como se divulga en la Publicación de EE.UU. n° 2011/0133730.
Otro reto de los marcadores magnéticos para biopsias es que para conseguir una respuesta magnética eficaz, es necesario maximizar el volumen de material. Estos requisitos dan como resultado un marcador típico que tiene una longitud significativamente mayor que el diámetro debido a que el marcador debe ser administrado a través de una aguja, y las agujas con calibres (diámetros) más pequeños son menos dolorosas para los pacientes. Dichos marcadores están en la región de 1 mm a 12 mm, con un cociente entre longitud y diámetro mayor de 5. En la práctica, estas restricciones de tamaño limitan la respuesta magnética, y a su vez, la facilidad con la que puede localizarse el marcador con una sonda magnética. Por lo tanto, se desea una respuesta más fuerte.
Además, el marcador generalmente es guiado a su posición y confirmado en su sitio con ultrasonidos o imágenes estereotácticas por rayos X. Esto significa que es deseable que el marcador sea claramente visible bajo rayos X e imágenes de ultrasonidos, y preferentemente con imágenes de RM, que también se pueden usarse para este fin. Las partículas de SPIO tienen una visibilidad limitada bajo rayos X, pero pueden hacerse visibles a los ultrasonidos combinándolas en una matriz de un material ecogénico, por ejemplo, un polímero. Aunque los marcadores magnéticos superan los inconvenientes de los hilos de guía y de las estrategias radioactivas, sigue habiendo una necesidad de un marcador magnético que pueda ser introducido a través de una aguja estrecha, que proporcione una fuerte respuesta magnética, que sea visible bajo rayos X y ultrasonidos y que pueda ser fabricado de una forma simple.
El requisito de que el marcador sea localizable magnéticamente requiere una cierta respuesta magnética desde el material implantado, y que esta respuesta sea medible a una distancia alejada del material. Esta respuesta está relacionada con el parámetro susceptibilidad magnética. En unidades del SI, la susceptibilidad magnética es una constante de proporcionalidad adimensional que indica el grado de magnetización inducido en un material en respuesta a un campo magnético aplicado, y está definida por:
M = * H
donde M es la magnetización del material (el momento del dipolo magnético por volumen unitario), medida en amperios por metro, H es la fuerza del campo magnético, medida también en amperios por metro, y x es la constante de proporcionalidad adimensional, la susceptibilidad magnética. Estrictamente hablando, x sólo es constante para los materiales paramagnéticos o diamagnéticos, sin embargo, en los materiales magnéticos blandos o superparamagnéticos donde el efecto de histéresis magnética es pequeño, y para unos campos aplicados H que son mucho menores que el campo requerido para saturar magnéticamente los materiales, la relación lineal M = x H es una buena aproximación.
La susceptibilidad magnética puede medirse mediante un abanico de métodos conocidos que incluyen la balanza de Faraday, la balanza de Gouy, el método de resonancia magnética y el método inductivo con un magnetómetro SQUID. La susceptibilidad magnética también puede calcularse usando paquetes informáticos de modelado de elementos magnéticos finitos tales como ANSYS Maxwell (ANSYS Inc., Canonsburg, PA), mediante el modelado del marcador en un campo homogéneo y midiendo las distorsiones causadas por el marcador que se corresponden con la susceptibilidad magnética. Véase, por ejemplo, el método descrito en: "Magnetic Susceptibility Modelling Using ANSYS", K. Bartusek et al., Progress In Electromagnetics Research Symposium Proceedings, Marrakesh, Marruecos, 20-23 de marzo de 2011.
Para un material dado, puede definirse una susceptibilidad de la masa magnética, que es la respuesta magnética inducida por masa unitaria del material. Susceptibilidad de la masa magnética, x p =k/p donde p es la densidad del material y Xp tiene unidades de m3/kg. Esta es una susceptibilidad normalizada y permite comparar las susceptibilidades relativas de diferentes materiales. Por ejemplo, la susceptibilidad de la masa magnética de acero inoxidable 316, un material patrón para marcadores de biopsia, tiene un intervalo de aproximadamente es aproximadamente de 3,80 x 10-7 a 1,27 x 10-6, un imán de neodimio permanente tiene un valor de aproximadamente 6,67 x 10-6, los marcadores basados en óxido de hierro superparamagnético (SPIO) tienen un valor de aproximadamente 2,5 x 10-5-1,0 x 10-3, dependiendo de la densidad de partículas en una matriz, mientras que las NiZn-ferritas tienen un intervalo de aproximadamente 3 x 10-3 a 1,22 x 10-1. Por tanto, las NiZn-ferritas requieren la detección de menos material que los SPIO, que a su vez requieren menos material que el material magnético permanente de neodimio o el acero inoxidable 316.
Para un marcador magnéticamente blando de volumen V, sometido a un campo H en la región de susceptibilidad lineal, el momento inducido total en el marcador será m = M V = x V H. Este momento dará lugar a su propio campo magnético Hmarcador, que a una distancia alejada del marcador puede ser aproximado al debido a un momento dipolar puntual equivalente, en concreto:
H r, - ^ - 1 í 3 r ( m r ) m\n m arcadorr'^4 n ^ r5 r 3^
donde r es el vector unitario. Es este campo inducido, Hmarcador, el que es medible y que hace que el marcador magnético sea localizable.
Sin embargo, hay otros factores que pueden afectar a la facilidad con la que puede localizarse un marcador dado - o en otras palabras, afectan a la fuerza del campo inducido, Hmarcador, a un r dado. Uno de estos se conoce como "desmagnetización". Este es un fenómeno que se produce en objetos con un tamaño finito, donde el campo inducido debido a la magnetización en una parte del cuerpo actúa desmagnetizando otra parte del mismo cuerpo. El efecto es muy complejo de predecir en geometrías distintas a las más simples, y por lo tanto se describe lo más a menudo, como aquí, para el caso especial de que el objeto sea un elipsoide de revolución (por ejemplo, una esfera, un cilindro o un disco). En tal caso, la magnetización inducida en el objeto es uniforme, y el campo magnético local se escribe normalmente:
Hlocal _ H - Hdesmag _ H - N M
donde Hdesmag es el "campo de desmagnetización" y N es el "factor de desmagnetización", aunque de forma más precisa, Hdesmag debería estar definido a lo largo de los ejes principales x,y,z del elipsoide, como:
Hdesmag = NxMx,H^esmag = NyMy,y Hlesmag = NZMZ.
En unidades del SI Nx Ny Nz = 1. Para el caso de una esfera, Nx = Ny = Nz = A. Para el caso de un cilindro con el eje z largo, Nx = Ny = A y Nz = 0. Para el caso de un disco delgado en el plano xy, Nx = Ny = 0 y Nz = 1. En el caso de un marcador hecho a partir de un único material dado con una masa dada, la forma de ese marcador afectará a la facilidad con la que puede ser localizado.
Por ejemplo: si el marcador es una esfera, experimentará un Hlocal = H - 1 M, independientemente de la orientación del marcador con respecto al campo aplicado. Por lo tanto, el momento inducido será:
m = x V Hlocal = X V H - 1V x m o m = x V H / ( 1 V3 x)
El campo inducido, Hmarcador, por lo tanto, también estará reducido en un factor de (1 A / ) a cualquier r dado, pero esta reducción estará presente independientemente de la orientación del marcador con respecto al campo magnetizante H.
Por el contrario: si el marcador fuera un cilindro, entonces, si H estuviera dirigido perpendicular al eje largo del cilindro, entonces Hmarcador se reduciría en un factor de (1 A / ) , mientras que si H estuviera dirigido a lo largo del eje largo, Hmarcador no se reduciría en absoluto. En este caso, el cociente Z = (1 A x) / 1 representa la señal de localización anisotrópica que presentaría el cilindro frente a cualquier método dependiente de la magnitud de Hmarcador por su fuerza de la señal.
En el caso de un cilindro de longitud finita, este cociente puede aproximarse como:

donde N-l = Nx = Ny y Nii = Nz = 1 - 2 NL Por ejemplo, en el caso de las muestras de acero inoxidable ferrítico indicadas en la Tabla 2, para las cuales x es aproximadamente 140, el cociente Z medido de 10,3:1 para un cilindro con un cociente de aspecto de 7:1 se corresponde con un Nl de aproximadamente 0,48; mientras que el mismo material en un cilindro con un cociente de aspecto de 3,7:1 mostraba un cociente de anisotropía Z de aproximadamente 4,7:1, que se corresponde con un Nl de aproximadamente 0,44.
Por lo tanto, para un marcador magnético, la respuesta magnética depende en parte de la susceptibilidad de la masa de su material o materiales constituyentes, y en parte de la forma del marcador, y para una forma dada, la respuesta puede cambiar según la orientación del marcador. La anisotropía de la respuesta magnética puede calcularse usando los factores de desmagnetización como se ha descrito anteriormente. Sin embargo, como los factores de desmagnetización son muy difíciles de calcular para las formas reales, se necesita una estrategia más práctica para definir la anisotropía de la respuesta. El cambio en la respuesta magnética según la orientación para un marcador dado puede considerarse un cambio en la "susceptibilidad eficaz" del marcador. La susceptibilidad subyacente del material marcador no cambia, pero el cambio en la respuesta magnética debido a la combinación de material, forma y orientación puede definirse como si estuviera variando la susceptibilidad.
Por lo tanto, para cualquier marcador dado, puede definirse un cociente entre la susceptibilidad magnética máxima (eficaz) y la susceptibilidad magnética mínima (eficaz). Este cociente puede denominarse anisotropía de la susceptibilidad magnética, y proporciona una indicación de la uniformidad de la respuesta de la susceptibilidad magnética a lo largo de los diferentes ejes del marcador o desde diferentes direcciones.
Susceptibilidad magnética máxima
Anisotropía de la susceptibilidad maqnética = -------- :—:------------- —------ ——Susceptibilidad magnética mínima
Dado que la susceptibilidad magnética es adimensional, la anisotropía de la susceptibilidad magnética, al ser un cociente de dos cantidades adimensionales, también es adimensional. Si la anisotropía es 1, la susceptibilidad es la misma desde cualquier dirección. Si la anisotropía es alta, la susceptibilidad es muy poco uniforme con respecto a la orientación del marcador.
El concepto de anisotropía de la susceptibilidad magnética está descrito en la técnica y puede medirse mediante diversos métodos. Por ejemplo, se describen dos tipos de medidores de la susceptibilidad direccional en A. K. Dubey, "Understanding an Orogenic Belt", Springer Geology: Un puente de la misma impedancia donde puede insertarse el espécimen en una bobina; y un sistema transformador equilibrado donde se coloca el espécimen dentro de un anillo de ferrita. Un método adicional denominado medidor de la susceptibilidad anisotrópica magnética tridimensional se describe en la Patente de EE.UU. n° 3.492.566. En cada caso, se aplica un campo magnético constante a la muestra, y se mide la variación en la respuesta magnética inducida según varía la orientación de la muestra. Uno de dichos métodos adicionales se muestra en la Figura 2(C) en la que se usa una sonda de susceptometría para medir la respuesta magnética inducida. Usando un sistema de susceptrómetro magnético, similar al descrito en la Publicación de EE.UU. n° 2011/0133730, se pudieron medir las señales máxima y mínima de los marcadores producidos a partir de diversos materiales a una distancia fija. Los resultados se muestran en la Tabla 3.
La medición de la anisotropía de la susceptibilidad magnética usando una sonda o un medidor de la susceptibilidad magnética es la estrategia ideal para definir la uniformidad de la respuesta magnética de un marcador. Sin embargo, existen estrategias alternativas para determinar el nivel de anisotropía de la susceptibilidad magnética. Por ejemplo, puede medirse el área proyectada del marcador en cualquier dirección y determinarse las áreas máxima y mínima proyectadas. Para un volumen dado de material marcador, una menor área proyectada implica un mayor efecto de concentración del campo, y viceversa. Dado que el efecto de concentración es inversamente proporcionar al área proyectada, la uniformidad de respuesta puede definirse por tanto por el cociente entre el área proyectada mínima y el área proyectada máxima del marcador fuera de todo los puntos de observación o direcciones disponibles. Esto es el cociente de anisotropía del área proyectada del marcador magnético, y proporciona una aproximación útil a la anisotropía de la susceptibilidad magnética. Un marcador esférico tendría un cociente entre el área proyectada mínima y el área proyectada máxima = 1. Un marcador con forma de varilla con un diámetro, d = 0,75 y una longitud, 1 = 7,5 tendría un cociente de d x 1 / (pi x d2/4) = 12,7.
También puede observarse que este cociente de áreas proyectadas es aproximadamente igual al factor de forma del marcador, que se define como el cociente entre la dimensión mayor y la dimensión menor del marcador, y esto también puede usarse como una aproximación de la anisotropía de la susceptibilidad magnética. Estos dos métodos geométricos no tienen en cuenta las variaciones en las propiedades magnéticas del marcador.
Donde se use el término "anisotropía de la susceptibilidad magnética" o anisotropía magnética de principio a fin, se entiende que el término "anisotropía del área proyectada" o "cociente entre la dimensión mayor y la menor" son medidas alternativas intercambiables de la uniformidad de la respuesta magnética.
La anisotropía de la susceptibilidad magnética puede determinarse para el marcador tanto antes del despliegue, cuando está en el dispositivo de administración, como después del despliegue. Cuando cambia la configuración del marcador, la anisotropía de la susceptibilidad magnética puede tener un valor diferente antes y después del despliegue.
Desde una perspectiva práctica, durante la cirugía para detectar el marcador usando una sonda magnética como se describe en el documento WO2014/013235, una alta anisotropía es indeseable: la señal magnética a una distancia constante variará dependiendo de la orientación del marcador con respecto a la sonda, y hace que el marcador parezca estar más cerca cuando se aproxima desde algunas orientaciones y más lejos desde otras. Al minimizar la anisotropía del marcador implantado mejora la capacidad de cirujano para localizar el marcador, lo que lo hace más intuitivo y aumenta la capacidad del cirujano para eliminar unos márgenes seguros de tejido alrededor de una lesión. Lo ideal es un cociente de anisotropía de 1, proporcionando una respuesta uniforme desde cualquier dirección. Sin embargo, en la práctica esto es difícil de conseguir dentro de las restricciones geométricas de la administración a través de una pequeña aguja, como se describe en el presente documento. Es deseable un cociente de anisotropía menor de 7 (es decir, entre 1 y 7), preferentemente menor de 5, y más preferentemente menor de 3. Debido a que la respuesta magnética se reduce exponencialmente con la distancia, un cociente de anisotropía menor de 2 está lo suficientemente cerca del ideal para su uso práctico.
Un marcador magnético queda magnetizado en presencia de un campo magnético y no muestra una remanencia magnética permanente (magnetización conservada) cuando se elimina el campo, o en otras palabras, un marcador ideal es magnéticamente blando, es decir, formado a partir de material magnéticamente blando o que se comporta como si fuera magnéticamente blando. Aquí, magnéticamente blando se define como que tiene una coercitividad magnética, Hc, menor o igual a 79,68 kA/m (1.000 Oe), o preferentemente menor o igual a 7,96 kA/m (100 Oe), o más
preferentemente menor o igual a 3,98 kA/m (50 Oe), que se desea en varias realizaciones. Durante la detección, el marcador es magnetizado y sigue la curva de puntos mostrada en la Fig. 1, volviendo a través de la línea continua cuando se elimina o se revierte el campo magnético. Cuando se aplica un campo magnético alterno, el campo de impulso magnetizante (H) empuja al material a lo largo de la curva continua de magnetización alrededor del bucle una vez para cada ciclo. El campo inducido en el material (denominado magnetización, M) es detectado por la sonda del susceptómetro, por ejemplo, la sonda de la Publicación de EE.UU. n° 2011/0133730. Los materiales marcadores ideales son blandos y tienen una curva de magnetización similar a la de la Fig. 1A.
Debería apreciarse que los imanes permanentes son magnéticamente duros, que tienen tanto una elevada remanencia magnética como una elevada coercitividad magnética (Fig. 1(B)). Generalmente no son adecuados para su uso como marcador magnético en esta solicitud debido a que pueden atraer o ser atraídos por otros objetos ferromagnéticos tales como herramientas quirúrgicas, y debido a que normalmente tienen una susceptibilidad magnética muy baja.
La cantidad de material que es necesario implantar para hacer que un marcador magnético sea detectable depende de la susceptibilidad magnética (x v) del material, más específicamente de la susceptibilidad de la masa magnética (x p = X v/p), que puede expresarse como:
X p = (Mr- 1)/p
donde Mr es la permeabilidad magnética relativa y p es la densidad del material.
El material usado en el marcador magnético debería tener una permeabilidad relativa mayor de 100, y preferentemente mayor de 500. Cuando se usan materiales magnéticos especializados, tales como hierro de alta pureza, o materiales amorfos tales como vidrios metálicos, la permeabilidad relativa es mayor de 1.000 y preferentemente mayor de 5.000. El marcador debería tener una alta susceptibilidad de la masa magnética, x p. Para materiales magnéticos convencionales tales como hierros, aceros y ferritas, x p debería ser mayor o igual a 0,05 m3 kg-1, preferentemente mayor o igual a 0,1 m3 kg-1 y más preferentemente mayor o igual a 1 m3 kg-1. El uso de materiales magnéticos especializados, tales como hierro de alta pureza, o de materiales amorfos tales como vidrios metálicos, permite unas susceptibilidades de la masa magnética incluso mayores, y / P es preferentemente mayor de 5 m3 kg-1 y más preferentemente mayor de 10 m3 kg-1.
Si la susceptibilidad de la masa magnética del material es lo suficientemente alta, un marcador esférico, que es susceptible de ser desplegado desde la aguja convencional descrita, sería susceptible de ser localizado magnéticamente y de proporcionar una señal perfectamente isotrópica. La Tabla 1 muestra las susceptibilidades de la masa de varios materiales magnéticos.
Tabla 1

continuación

La detección y localización de estos marcadores magnéticos puede realizarse con un magnetómetro sensible (o susceptómetro) que genera un campo magnético alterno, para excitar magnéticamente el marcador, y detecta la firma del campo magnético generada por el marcador, como se divulga en la Publicación de EE.UU. n° 2011/0133730. El marcador también podría detectarse con nuestras técnicas tales como imágenes de RM, imágenes de la partícula magnética, medición de las corrientes parásitas, efecto Hall o magnetotomografía.
En un aspecto de la invención, el marcador comprende partículas superparamagnéticas. Las partículas superparamagnéticas normalmente contienen un núcleo de óxido de hierro (magnetita y/o maghemita) rodeado por un recubrimiento biocompatible tal como dextrano, carboxidextrano, otros azúcares, albúmina, PEG o polímeros biocompatibles. Para mostrar un comportamiento superparamagnético, es necesario que los núcleos magnéticos de las partículas estén por debajo de un diámetro crítico, normalmente en el intervalo de 3-25 nm dependiendo del material y de la estructura.
El óxido de hierro es el material preferido para el núcleo superparamagnético debido a su baja toxicidad, pero existen otros materiales que podría formar un núcleo superparamagnético. El material del núcleo debería ser uno que fuera susceptible de ser ordenado magnéticamente. Puede ser un metal, tal como cobalto, hierro o níquel; una aleación metálica, una aleación de tierras raras y un metal de transición, una ferrita de tipo M o espinela que contenga aluminio, bario, bismuto, cerio, cromo, cobalto, cobre, disprosio, erbio, europio, gadolinio, holmio, hierro, lantano, lutecio, manganeso, molibdeno, neodimio, níquel, niobio, paladio, platino, praseodimio, promecio, samario, estroncio, terbio, tulio, titanio, vanadio, iterbio e itrio, o una mezcla de los mismos.
El núcleo también puede formarse mediante la oxidación de una combinación de una sal de (II) y otra sal metálica. Las sales metálicas que son beneficiosas incluyen sales de aluminio, bario, bismuto, cerio, cromo, cobalto, cobre, disprosio, erbio, europio, gadolinio, holmio, hierro, lantano, lutecio, manganeso, molibdeno, neodimio, níquel, niobio, paladio, platino, praseodimio, promecio, samario, estroncio, terbio, tulio, titanio, vanadio, iterbio e itrio.
En otro aspecto de la invención, el marcador comprende un material sólido magnéticamente blando para proporcionar una respuesta magnética significativamente aumentada cuando es localizado con una sonda de susceptometría magnética. Los marcadores producidos a partir de materiales magnéticamente blandos pueden incluir diversos materiales paramagnéticos, ferromagnéticos y ferrimagnéticos tales como hierro, níquel, cobalto y sus aleaciones, hierro eléctrico (incluyendo FM, hierro eléctrico consumet), silicio-hierros (incluyendo las variantes "A", "A-FM", "B", "B-FM", "C") hierro-fósforo, níquel-hierro (por ejemplo, aleaciones HyRa, aleaciones HyMu, Hipernom, Parmalloy, Superalloy, Mu-metal), aleaciones Heusler, aleaciones Fernico (aleaciones basadas en Hierro-Níquel-Cobalto), aleaciones Cunife (aleaciones basadas en Cobre-Níquel-Hierro), aleaciones Alcomax (aleaciones basadas en Hierro-Níquel-Aluminio-Cobalto-Cobre), varios aceros inoxidables de las series 300 (por ejemplo 302, 304, 316), de las series 400 (por ejemplo 410, 416, 420, 430, 440, 446, 470) así como aleaciones especializadas de acero inoxidable (por ejemplo, aleaciones de cromo-hierro tales como la serie Chrome-Core® (Carpenter Technology Corp, Wyomissing PA), aceros inoxidables martensíticos), ferritas tales como MnZn-ferritas, NiZn-ferritas, MgZn-ferritas, Ba-ferritas, MnMgZn-ferritas y MgZnCu-ferritas.
En un aspecto preferido de la invención, el marcador comprende un vidrio metálico con una susceptibilidad de la masa magnética muy alta para proporcionar una respuesta magnética significativamente mejorada. Los vidrios metálicos también se conocen como metal amorfo o vidrios metálicos masivos, e incluyen material basado en Fe o Co tal como los producidos por Metglas Inc. (Conway, SC) o Neomax Materials Co. Ltd (Osaka, Japón); y alótropos magnéticos del carbono (por ejemplo, fullerenos, grafito pirolítico altamente orientado, nanoespumas de carbono, carbono nanoporoso). Algunos ejemplos de vidrios metálicos incluyen, pero no se limitan a: FINEMET, NANOPERM, HITPERM (todos de Hitachi Metals, Tokio, Japón), METGLAS #2605, METGLAS #2826, METGLAS #2615, METGLAS #2714A, METGLAS #2605.
Con objeto de garantizar la biocompatibilidad, estos materiales pueden estar recubiertos por, o contenidos en, un
material biocompatible o inerte, por ejemplo, Bioglass, carbono de tipo diamante (DLC), oro, hidroxiapatito, Hierro, magnesio, nitinol, parileno, polímero de fosforilcolina (PC), metacrilato de polibutilo (PMBA) y acetato de polietilenvinilo (PEVA), polietileno, PET, politetrafluoroetileno (PTFE), PEBAX, PEEK, PEKK, platino, silicona, titanio y similares.
Además, un material conformado tal como un acero para muelles o aleaciones de materiales con memoria de forma tales como Nitinol, y polímeros con memoria de forma tales como copolímeros en bloque de PEO-PET y PEEK también podrían proporcionar la función adicional de formar una forma específica al desplegarse si rodean o están rodeados por un material magnéticamente blando.
El material magnético podría estar además contenido en una matriz biocompatible, tal como colágeno, gelatina y otros materiales basados en celulosa, alcohol polivinílico (PVA), poligliconato, materiales basados en poliéster (formados por la homopolimerización o la copolimerización de uno o más de estos monómeros: glicólido, L-lactida y sus isómeros, £-caprolactona, p-dioxanona y carbonato de trimetileno (TMC). Estos pueden incluir homopolímeros tales como: poli(L-lactida) Poli(DL-lactida), Poli(TMC), policaprolactona (PCL), poliglicólido (PGA), poli(glicólido-L-lactida) (PGL) o poli(pdioxanona) (PDS); o copolímeros tales como: L-lactida/DL-lactida, L-lactida/glicólido, L-lactida/caprolactona, DL-lactida/glicólido, DL-lactida/caprolactona, glicólido/caprolactona, L-lactida/glicólido/caprolactona, DL-lactida/glicólido/caprolactona, poli(dioxinona co-carbonato de trimetileno-co-glicólido) Glykomer 631 (comercializado como Biosyn®); o copolímeros de éstos con PDS, hidrogeles (de uno o más monómeros de metacrilato de hidroxietilo, metacrilato de hidroxietoxietilo, metacrilato de hidroxidietoxietilo, metacrilato de metoxietilo, metacrilato de metoxietoxietilo, metacrilato de metoxidietoxietilo, dimetacrilato de etilenglicol, N-vinil-2-pirrolidona, N-isopropil AAm, acetato de vinilo, ácido acrílico, MAA, N-(2-hidroxipropil) metacrilamida, etilenglicol, acrilato de PEG, metacrilato de PEG, diacrilato de PEG, dimetacrilato de Pe G).
En un aspecto de la invención, el marcador implantado está hecho a partir de un material magnéticamente blando, y el marcador está conformado para reducir la anisotropía de la respuesta magnética. Esta anisotropía se define como el cociente entre la respuesta magnética máxima y la respuesta magnética mínima. La anisotropía aparece en las formas con un cociente de aspecto largo y delgado debido a que los materiales magnéticamente blandos se concentran en cualquier línea de un campo magnético que las atraviese. El efecto de concentración depende de la cantidad de material en la dirección de las líneas del campo. Por lo tanto, una forma larga y delgada, cuando su eje largo está alineado con el campo, concentra muchas más líneas de campo a través del material que cuando su eje largo es perpendicular a las líneas del campo. El resultado es que la respuesta magnética medida por un susceptómetro es mucho mayor a la dirección del eje largo que en la dirección del eje corto.
La Tabla 2 muestra los cocientes de anisotropía de varios cilindros de material magnético de diversos tamaños.
Cocientes de anisotropía de la susceptibilidad magnética de cilindros de diversos tamaños y materiales a una distancia constante. Tabla 2

Al alterar la forma para influir sobre el efecto de concentración, puede alterarse la anisotropía. Por ejemplo, creando una flexión en el marcador, el cociente de anisotropía para un cociente dimensional previo al despliegue dado puede reducirse significativamente (Tabla 3). Un ángulo incluido de 130° reduce sorprendentemente el cociente de 6,7 a 4,5 y una flexión en U lo reduce adicionalmente a 2,1. En otro ejemplo, una flexión de 90° reduce el cociente de 10,7 a 2,6, y un ángulo incluido de 60° reduce el cociente adicionalmente a 1,28. Haciendo referencia de nuevo a la Tabla 2, usando un sistema de susceptrómetro magnético, similar al descrito en la Publicación de EE.UU. n° 2011/0133730, se pudieron medir las señales máxima y mínima de los marcadores producidos a partir de diversos materiales a una distancia fija. La gráfica muestra que hay un ángulo óptimo para una señal uniforme cuando el ángulo es de entre 0° y 90°, y más preferentemente de entre 0° y 45°. La Figura 18 muestra cómo varía la señal con el ángulo de detección con respecto al eje principal del marcador para marcadores con diferentes ángulos incluidos.
Cociente de anisotropía de varias formas y tamaños de marcador magnético a una distancia constante Tabla 3

(continuación)

(continuación)

(continuación)

(continuación)

La Fig. 2(A) es una gráfica del cambio relativo en el cociente de anisotropía según se reduce el ángulo incluido de una flexión en el marcador. Las mediciones se realizaron usando la configuración de análisis de la Fig. 2(B). La gráfica (Fig. 2A) muestra que hay un ángulo óptimo para una señal uniforme cuando el ángulo es de entre 0° y 90°, y más preferentemente de entre 0° y 45°. La Fig. 2(C) es una gráfica que muestra cómo varía la señal con el ángulo de detección con respecto al eje principal del marcador para marcadores de hierro con diferentes ángulos incluidos. La Fig. 2(D) es una gráfica que muestra cómo varía la señal con el ángulo de detección con respecto al eje principal del marcador para marcadores de hierro con diferentes ángulos incluidos.
En algunos casos, puede ser ventajoso que el marcador asuma la forma únicamente después de que haya sido desplegado, de forma que pueda estar compactado más eficazmente en la aguja de despliegue antes de su despliegue. Para facilitar esto puede usarse un material elástico o una sección de material elástico.
Dichas formas incluyen, pero no se limitan a, las siguientes:
- formas de "píldora" o "microesfera" (Fig. 3(A)), que reducen la anisotropía proporcionando más material magnético en el eje transversal (perpendicular al eje largo de la microesfera). Dichos marcadores pueden incluir unos extremos conformados que comprenden secciones más estrechas que concentran el campo en una dirección alejada del eje principal (Figs. 3(B) y (C)). Por ejemplo, un modelo de elemento finito del marcador de la Fig. 3(C) y una sonda del tipo descrito en la Publicación de EE.UU. n° 2011/0133730, con el marcador a una distancia de 20 mm del extremo de la sonda, dieron un cociente de anisotropía de la susceptibilidad magnética de 2,5;
- los diseños de "tipo mancuerna" como se muestran en las Figs. 4 (A)-(D), están construidos a partir de segmentos del mismo material. Este diseño proporciona de forma similar más material magnético a lo largo del eje transversal. En diversas realizaciones, los marcadores tienen aproximadamente 5-10 mm de longitud, y son útiles para reducir las corrientes parásitas opuestas. Por ejemplo, un modelo de elemento finito del marcador de la Fig. 4(E) y una sonda del tipo descrito en la Publicación de EE.UU. n° 2011/0133730, con el marcador a una distancia de 20 mm del extremo de la sonda, dieron un cociente de anisotropía de la susceptibilidad magnética de 2,6;
- el cable o las hebras multihilo como se muestran en las Figs. 5(A) y (B) y pueden estar trenzados. Se ilustran varias formas trenzadas, pero igualmente son posibles otras formas trenzadas tales como 1 x 4, 1 x 5 etc., con 3, 4, 5, 6, 7 o más hebras; el uso de hebras reduce la pérdida por corrientes parásitas opuestas, y al tener múltiples facetas proporciona una respuesta a ultrasonidos superior. Los hilos también podrían estar huecos, como se ilustra, o incluir áreas vacías entre las hebras;
- hilos o tubos flexionados que incluyen ángulos agudos y obtusos, formas en U, formas en X (Tabla 3);
- una única longitud de marcador cilíndrico dividida en dos o más porciones pequeñas con un tamaño similar proporciona un cociente de anisotropía mejorado menor de 5;
- un marcador cilíndrico con una sección central de mayor diámetro y secciones exteriores de menor diámetro también proporciona un cociente de anisotropía mejorado;
- marcadores formados por dos elementos entrelazados conformados en U (Fig. 18).
En un aspecto de la invención, el marcador implantado está hecho principalmente a partir de un material magnéticamente blando, y el marcador tiene un cociente de aspecto largo y delgado antes del despliegue, pero cambia la configuración después del despliegue a una forma con una baja anisotropía de la susceptibilidad magnética. Antes del despliegue, el marcador puede tener un cociente entre longitud y diámetro o factor de forma mayor de 5, y un cociente de anisotropía magnética de la susceptibilidad mayor de 5 o incluso mayor de 7 o 9, resultando dichos valores de la longitud extendida del marcador antes del despliegue y siendo beneficioso aumentar el volumen del marcador contenido en la aguja, de forma que se maximice la respuesta magnética una vez desplegado. Tras el despliegue, el cociente de anisotropía magnética de la susceptibilidad es menor de 5 y preferentemente menor de 3, e idealmente de 2 o menos, para proporcionar una respuesta magnética más uniforme.
En un aspecto, el marcador es deformable elásticamente o deformable flexiblemente, de forma que cambia elásticamente o flexiblemente en la forma y el tamaño desde una forma compactada o previa al despliegue dentro de la aguja o el dispositivo de despliegue con un factor de forma asociado, a una forma y factor de forma posterior al despliegue. La elasticidad o la flexibilidad pueden derivar, por ejemplo, del uso de un material elástico o flexible, o de una estructura elástica, flexible o desplegable, o combinaciones de los mismos. De acuerdo con la invención, el marcador magnético es deformable elásticamente o flexiblemente entre una configuración compactada que tiene una anisotropía de la susceptibilidad magnética mayor, y una configuración desplegada / descompactada que tiene una anisotropía de la susceptibilidad magnética menor. Alternativamente, el marcador magnético es deformable elásticamente o flexiblemente entre una configuración compactada que tiene un cociente de anisotropía del área proyectada mayor, y una configuración desplegada / descompactada que tiene un cociente de anisotropía del área proyectada menor.
De acuerdo con la invención, la configuración desplegada o administrada del marcador tiene una anisotropía de la susceptibilidad magnética menor de 5, más preferentemente menor de 3 e idealmente menor de 2, con objeto de dar la señal de detección más uniforme; antes del despliegue mientras está en el interior del dispositivo de administración, el marcador, en su configuración compactada, tiene una anisotropía de la susceptibilidad magnética mayor de 5 y más preferentemente mayor de 7, con objeto de maximizar el volumen de material en el marcador, dado el restringido diámetro del dispositivo de administración. Por analogía, el marcador en su configuración compactada, tiene un
cociente de anisotropía del área proyectada mayor de 5, y más preferentemente mayor de 7; pero en una configuración desplegada / descompactada tiene un cociente de anisotropía del área proyectada menor de 5, más preferentemente menor de 3 e idealmente menor de 2. Con objeto de conseguir este cambio en la configuración, el marcador requiere un grado de flexibilidad mediante el cual una dimensión (por ejemplo, el diámetro perpendicular al eje principal) del marcador cambia en un factor de, al menos, 1,5 veces de su valor compactado a su valor desplegado. Preferentemente, la dimensión desplegada es mayor que la dimensión compactada en un factor mayor de 2, y más preferentemente mayor de 3, con objeto de proporcionar un factor de forma (cociente entre la dimensión máxima y la dimensión mínima) próximo a 1 o 2 en el despliegue, teniendo todavía suficiente material para ser detectado.
El marcador magnético en su configuración compactada está compactado en el interior de un dispositivo de administración antes de su uso. Es necesario que el dispositivo de administración sea capaz de administrar el marcador a través de la piel para marcar el área tisular de interés, por ejemplo, una lesión cancerosa. Los dispositivos de administración adecuados incluyen cualquier sistema de administración basado en aguja o en cánula, comprendiendo normalmente una aguja y un medio para impulsar el marcador a través del extremo o fuera del lateral de la aguja, tal como un émbolo o un estilete. La aguja tiene preferentemente un calibre de 14 a 18. Esto significa que la aguja tiene generalmente un diámetro interno de 0,8 mm a 1,5 mm, pero posiblemente puede ser tan grande como de 1,8 mm para ciertos diseños de aguja. Preferentemente tiene entre 1,0 y 1,5 mm de diámetro. Si se usa una aguja al vacío, la dimensión de la aguja es normalmente de calibre 11, con un diámetro interno de 2,3 a 2,5 mm.
Los marcadores que consiguen el cambio deseado en la anisotropía de la susceptibilidad magnética entre sus configuraciones compactada y descompactada incluyen, pero no se limitan a, las siguientes:
formas de tipo "ovillo" (Figs. 6(A) y (B)) que reducen la anisotropía proporcionando una cantidad sustancialmente uniforme de material magnético en cualquier eje dado del marcador. Las múltiples facetas proporcionan también una respuesta a ultrasonidos superior. Un ovillo está formado preferentemente a partir de un material con una gran respuesta magnética, tal como un vidrio metálico o un material magnéticamente blando de la lista anterior. La bola puede estar formada a partir de un hilo fino con un diámetro, por ejemplo, de entre 10 pm y 250 pm y una longitud, por ejemplo, de entre 5 mm y 150 mm, y flexionado con la forma de la bola. El marcador puede ser deformable elásticamente o deformable flexiblemente. El marcador está comprimido para que se ajuste al interior de la aguja de despliegue o dispositivo de administración, donde, antes de la administración, puede estar restringido para que adopte una forma más cilíndrica. Durante el despliegue, la bola se expande hasta casi su tamaño original y adopta una forma sustancialmente esférica. La Tabla 3 muestra que este marcador puede conseguir un cociente de anisotropía próximo al ideal de 1.
Formas de "farolillo chino" (Fig. 7). Durante el despliegue, este marcador está dispuesto de tal forma que se reconfigura flexiblemente desde un cilindro hasta una configuración de farolillo más comprimida, aumentando por tanto la uniformidad de la respuesta magnética (reduciendo la anisotropía) debido a que la cantidad de material en el eje transversal está aumentada con respecto a la de un cilindro. Las múltiples facetas proporcionan también una respuesta a ultrasonidos superior.
Marcadores que comprenden una pluralidad de elementos magnéticamente blandos unidos por bisagras como se muestra en la Fig. 8(A)-(G) que se deforman en su forma durante el despliegue (ya sea plásticamente, pretensado o a través de la acción de una memoria de forma en el material). La mayor longitud del marcador en esta realización es posible debido a que la forma del marcador en la aguja de despliegue es lineal, pero se pliega en otra configuración tras la inyección en un sitio. Esto reduce la anisotropía proporcionando una cantidad sustancialmente uniforme de material magnético en cualquier eje dado del marcador.
Ventajosamente, las múltiples facetas proporcionan también una respuesta a ultrasonidos superior. Es deseable tener al menos 3 elementos para obtener una respuesta uniforme, y pueden añadirse muchos más, aunque por complejidad, el número es preferentemente menor de 20 y más preferentemente menor de 10. Las formas de bisagra y otras formas flexibles o deformables flexiblemente pueden comprender una pluralidad de unidades o componentes magnéticos menores unidos por uniones no magnéticas flexibles o deformables flexiblemente tales como plástico o materiales con memoria de forma. También pueden incluirse combinaciones de estas formas, por ejemplo, hilo flexible hecho a partir de un cable multihebra. Como se muestra en la Tabla 3, un marcador de esta clase con múltiples elementos de bola y un cociente entre la longitud geométrica previa al despliegue y el diámetro de 8 puede tener una anisotropía magnética de la susceptibilidad posterior al despliegue menor de 2.
Marcadores que comprenden una pluralidad de elementos unidos por uniones colapsables entre ellos, de forma que durante el despliegue, los elementos colapsan entre sí para formar una región amorfa con un bajo cociente de anisotropía magnética de la susceptibilidad. Las uniones pueden estar formadas a partir de un material de tipo cadena tal como sutura u otro polímero. Preferentemente, los elementos magnéticamente blandos son uniones de una cadena que pueden colapsar sobre sí mismos después del despliegue.
Marcadores que comprenden un hilo deformable elástica o flexiblemente, o una forma cilíndrica antes del despliegue que durante el despliegue forma una estructura o malla de hilo. Dichas estructuras pueden incluir una bobina cilíndrica, una hélice, una bobina cónica, una bobina esférica, un "ovillo" aleatorio o un poliedro tal como un tetraedro o parte del
mismo.
Marcadores que comprenden un muelle helicoidal deformable flexiblemente enrollado o conformado que está comprimido antes del despliegue y se expande tras el despliegue hasta una forma con un bajo cociente de anisotropía magnética de la susceptibilidad. Por ejemplo, un muelle helicoidal conformado en un círculo da un cociente de anisotropía magnética de la susceptibilidad sorprendentemente bajo (Tabla 3). Preferentemente, el cociente entre el diámetro del círculo y el diámetro del muelle helicoidal es menor de 5 con objeto de mantener una respuesta magnética más uniforme.
Marcadores que comprenden dos o más elementos conectados por una unión formada a partir de un material elástico o deformable flexiblemente o elástico de forma que los elementos, una vez desplegados, se tensan en una nueva configuración, dando una baja anisotropía magnética de la susceptibilidad. La Tabla 4 ilustra una de dichas realizaciones que comprende dos elementos cilíndricos cortos formados por un material magnéticamente blando unidos por un filamento en muelle. En la aguja de despliegue, los dos elementos están restringidos a estar alineados axialmente unidos por el filamento. El filamento está inclinado de forma que durante el despliegue los dos elementos se retensan uno entre el otro para aproximarse a una forma tetraédrica con un bajo cociente de anisotropía magnética de la susceptibilidad menor de 2. El filamento del muelle puede estar formada a partir de acero para muelles, un material con memoria de forma u otro material elástico o deformable flexiblemente. Preferentemente, la longitud de los elementos cilíndricos es entre 2 y 5 veces su diámetro para proporcionar una buena uniformidad de la respuesta combinada con una forma compacta. En una realización adicional de este concepto, se despliegan múltiples elementos de un material elástico desde la aguja, y el material elástico está inclinado de forma que durante el despliegue los elementos conforman una estructura. Algunos ejemplos de estructuras pueden incluir una bobina cilíndrica, una hélice, una bobina cónica, una bobina esférica, un "ovillo" aleatorio o un tetraedro o parte del mismo. En estos diseños, la longitud del marcador, cuando está en su configuración compactada, puede ser entre 2 y 5 veces su diámetro, pero podría ser incluso mayor, por ejemplo, hasta 10 o más veces el diámetro, dependiendo del grado de elasticidad de la estructura de material que se esté usando, permitiendo por tanto que se despliegue más material magnético para maximizar la detectabilidad del marcador.
Un beneficio adicional de las formas en "ovillo" (Fig. 6) trenzadas o multifacetadas es la superior visibilidad para las técnicas de imágenes reflectantes tales como ultrasonidos, IR o radar de banda ultra ancha. Estos beneficios también pueden apreciarse mediante la revisión de la superficie externa de las otras formas mencionadas, incluyendo las secciones que no son bisagras de las formas de bisagra (Fig. 7) desde formas cilíndricas hasta facetadas o estriadas tales como, pero no se limitan a, triangular, pentagonal, dodecágono, secciones transversales dentadas (Fig. 9). Puede observarse un efecto similar en ultrasonidos de materiales sinterizados tales como ferritas. La correcta elección del material blando en cualquiera de las formas mencionadas puede proporcionar visibilidad a las imágenes de rayos X. Las U entrelazadas ocupan un espacio similar a las U pero con un aumento en la señal y una reducción en la anisotropía (Fig. 18).
Las anteriores características pueden combinarse para proporcionar un marcador con una reducida anisotropía y unas imágenes mejoradas.
En un aspecto adicional de la invención, el cociente de anisotropía magnética de la susceptibilidad del marcador implantado es modificado variando las propiedades magnéticas del material magnéticamente blando que forma el marcador a lo largo de su longitud.
En otro aspecto de la invención, la reducción en la anisotropía magnética de la susceptibilidad puede conseguirse a través del uso de materiales compuestos tales como la formación de ferrita a través de una sinterización con dos o más materiales donde al menos un material es un material blando distribuido para proporcionar una respuesta menos anisotrópica. Pueden crearse formas similares, como se ha mencionado previamente, donde se usan múltiples materiales en el marcador. Una de dichas realizaciones es un marcador de segmento único con una sección transversal constante.
Un beneficio adicional de este aspecto de la invención es que la distribución blanda o la forma pueden ser independientes de la forma externa, y pueden crearse unas secciones transversales que mejoren la visibilidad de las imágenes bajo ultrasonidos o rayos X. Algunos ejemplos adicionales de marcadores magnéticos compuestos con una reducida anisotropía incluyen marcadores blandos distribuidos en una estructura colapsable de tipo endoprótesis, específicamente aquellos que son autoexpandibles.
Adicionalmente, en un cable o en hebras multihilo (especialmente donde estén trenzados), algunas realizaciones incluyen versiones huecas donde los hilos individuales están formados a partir de diferentes materiales o formados a partir de un material compuesto, por ejemplo, un núcleo y un material de recubrimiento o vaina donde al menos uno o más de estos son materiales magnéticamente blandos. Un ejemplo específico de esto es donde el núcleo o el material de recubrimiento está hecho de Nitinol o de otro material con memoria de forma (incluyendo polímeros con memoria de forma) que se usa para formar la forma posterior al despliegue (Fig. 10). Igualmente es posible crear un hilo donde se produce un núcleo producido a partir de múltiples materiales cubierto por el material de la vaina y bien se usa directamente como marcador magnético o bien se usa posteriormente en forma de cable o multihebra (Fig. 11).
También podrían usarse los hilos o uno de los segmentos de hilos multinúcleo para proporcionar una visibilidad mejorada bajo rayos X.
Las Figs. 12(A) y (B) son ejemplos de un marcador segmentado (nota: son posibles más o menos segmentos). La segmentación aumenta las pérdidas entre las secciones en la dirección axial y resuelve el efecto de las corrientes parásitas opuestas, reduciendo la anisotropía.
Las Figs 13(A) y (B) muestran ejemplos de un material blando (gris oscuro) que puede ser moldeado en una forma que es independiente de la forma externa del marcador (nota: en la construcción podrían usarse más de dos materiales). La anisotropía se mejora proporcionando más material magnético en el eje transversal y reduciendo la corriente parásita opuesta a través de la combinación de los materiales seleccionados. En una realización mostrada en la Fig. 13(C), el núcleo magnéticamente blando está formado a partir de un material con una respuesta magnética muy alta, tal como un vidrio metálico, de forma que puede obtenerse una respuesta magnética suficiente a partir de únicamente una esfera muy pequeña del material. El núcleo está encerrado en una capa protectora que comprende un recubrimiento biocompatible o una cápsula, por ejemplo, una cubierta de titanio o un recubrimiento de polímero biocompatible. Debido a que el núcleo es esférico, el cociente de anisotropía magnética de la susceptibilidad es próximo a 1.
Los marcadores conformados con bisagras de plástico/pretensados/con memoria de forma de múltiples materiales con diferentes propiedades magnéticas se muestran en las Figs. 14(A-E). Estas configuraciones mejoran el ajuste de la respuesta con objeto de reducir la anisotropía proporcionando una respuesta sustancialmente uniforme en cualquier eje dado del marcador. Las múltiples facetas proporcionan también una respuesta a ultrasonidos superior.
En otro aspecto de la invención, un marcador largo y delgado está dividido en varios marcadores más pequeños. Los múltiples marcadores que están compactados entre sí antes del desfile tienen las mismas dimensiones globales y material, y pueden usarse para reducir la anisotropía con respecto a las dimensiones globales del material. Por ejemplo, las porciones de marcador de 3 x 2 mm de largo o de 2 x 3 mm de largo o de 6 x 1 mm de largo han reducido la anisotropía en comparación con un marcador de 1 x 6 mm de largo con el mismo diámetro exterior. Sorprendentemente, esta reducción en la anisotropía se produce incluso cuando los segmentos se alinean uno detrás del otro con la misma forma que un marcador individual de las dimensiones combinadas. (Tabla 5) Por ejemplo, un único marcador con una dimensión de 5 mm de acero inoxidable ferrítico da un cociente de anisotropía de 6,7. Dos marcadores de los marcadores de 3 mm del mismo material dan un cociente de anisotropía de entre 3,2 y 4,6 dependiendo de las orientaciones relativas.
Tabla 5

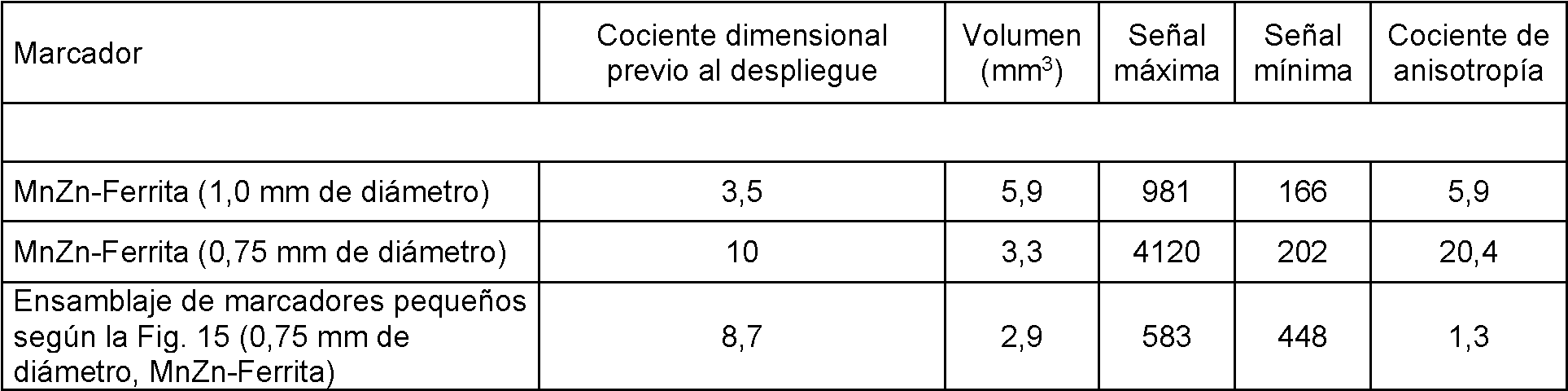
En un ejemplo específico adicional de esto, un conjunto de marcadores o de partículas magnéticas producidas a partir de un material magnéticamente blando puede conservar una pequeña cantidad de magnetismo. Una vez desplegadas en el paciente, estas partículas magnéticas pueden a continuación autoensamblarse en un marcador magnético asociado que posee una menor anisotropía magnética de la susceptibilidad. Múltiples marcadores magnéticamente blandos con una pequeña remanencia magnética se autoensamblarán en un marcador magnético asociado con una cantidad sustancialmente uniforme de material en cada dirección, minimizando por tanto la anisotropía (Fig. 15). Esta pequeña remanencia magnética puede superarse mediante la excitación magnética del campo de excitación del magnetómetro (o susceptómetro) como se describió anteriormente. La Tabla 6 muestra los parámetros de las partículas ensambladas mediante dos tipos de composiciones magnéticas.
Tabla 6
En un ejemplo adicional de esto, los marcadores o partículas magnéticamente blandos encerrados en el interior de superficies hidrófobas (nanotexturación a través del efecto loto, nanorrecubrimientos de sílice, EnBio CoBlast PTFE, hidroxiapitito, recubrimientos de nanotubos de carbono, carburo de calcio precipitado y recubrimiento de un ácido graso con látex polimérico, nanocompuestos de poliestireno de óxido de manganeso o de poliestireno de óxido de cinc) o esferas, se juntarán (autoensamblarán) durante el despliegue en el paciente. Para minimizar la energía superficial, esta realización formará una forma muy compactada tal como una esfera o un sistema elipsoidal que tendrá una anisotropía magnética de la susceptibilidad mejorada con respecto a las partículas del interior del sistema de administración, que estarán restringidas en una forma alargada que va a ser alargada. La Fig. 16 representa marcadores o partículas recubiertas hidrofóbicamente que se autoensamblan, para minimizar la energía superficial, en un marcador magnético asociado con una cantidad de material sustancialmente uniforme en todas las direcciones, minimizando la anisotropía.
En otro aspecto de la invención, puede suspenderse pequeños micromarcadores o micropartículas de un material blando en el interior de una matriz biocompatible (Figs. 17(A) y (B)). El control de la distribución de las partículas magnéticas, de una forma similar a la analizada con respecto a las Figs. 10-12, permite una disminución en la anisotropía magnética de la susceptibilidad, así como la independencia de la forma exterior. También puede usarse para garantizar una ubicación establecida y una orientación entre los marcadores magnéticos.
En un ejemplo adicional de esto para el caso, usando una matriz de gel con una suspensión de partículas magnéticamente blandas y dimensionando estas partículas apropiadamente, el gel y las partículas pueden ser desplegados a través de la aguja de despliegue (Fig. 17(B)). La forma del gel y las partículas desplegadas estará restringida únicamente por el sitio de inyección (es decir, el tejido de una lesión) que es menor en comparación con el de la aguja. Este gel también puede establecerse con la inyección, haciendo que sea menos probable que migre de su ubicación desplegada y que sea más fácil de eliminar quirúrgicamente si se está eliminando el tejido. Si fuera necesario, podría realizarse la adición de otras partículas tales como oro para proporcionar una respuesta radiopaca adicional para la visualización con rayos X. Para la localización del marcador, la anisotropía debería ser menor o igual a 9, preferentemente menor o igual a 6, más preferentemente menor o igual a 3.
La presente divulgación proporciona varias formas de fabricar marcadores magnéticos con un anisotropía aceptable sin afectar a la facilidad de administración de las partículas.
En otro aspecto de la divulgación, se proporciona un método para marcar un sitio de tejido blando de interés, tal como el sitio de un tumor o una lesión benigna, por ejemplo, dentro de la mama, el pulmón, el intestino/colon, el recto, la próstata u otro órgano afectado con cáncer, o un nódulo linfático de la axila u otro lecho linfático del cuerpo. El método incluye las etapas de (i) insertar dicho marcador magnético en un tejido próximo a la lesión o sitio objetivo, y (ii) detectar dicho marcador usando un susceptómetro, y opcionalmente (iii) extirpar quirúrgicamente el tejido objetivo alrededor del marcador. Preferentemente, el susceptómetro detecta el marcador proporcionando un campo magnético en la región del marcador y midiendo la magnetización inducida en el marcador.
Salvo que se indique lo contrario, todas las cifras que expresan longitudes, anchuras, profundidades u otras dimensiones, y similares, usados en la memoria descriptiva y en las reivindicaciones, debe entenderse en todos los casos que indican tanto los valores exactos según se muestran como que están modificadas por el término "aproximadamente". Por consiguiente, a menos que se indique lo contrario, los parámetros numéricos establecidos en la memoria descriptiva y en las reivindicaciones son aproximaciones que pueden variar dependiendo de las propiedades deseadas que se desean obtener. Finalmente, y no como un intento de limitar la aplicación de la doctrina de equivalentes al ámbito de las reivindicaciones, cada parámetro numérico debe interpretarse al menos a la luz del número de cifras significativas notificadas y aplicando las técnicas de redondeo habituales.
Debe interpretarse que los términos "un/a" "uno/a", "el/la" y los referentes similares usados en el contexto de descripción de la invención (especialmente en el contexto de las siguientes reivindicaciones) cubren tanto el singular como el plural, salvo que se indique lo contrario en el presente documento o el contexto lo contradiga claramente. Todos los métodos descritos en el presente documento pueden realizarse en cualquier orden adecuado salvo que se indique lo contrario en el presente documento o que de otro modo el contexto lo contradiga claramente. El uso de cualquiera y todos los ejemplos o lenguaje ejemplar (por ejemplo, "tal como") proporcionados en el presente
documento pretende simplemente iluminar mejor la invención y no supone una limitación del ámbito de cualquier reivindicación. Debería interpretarse que ningún lenguaje de la memoria descriptiva indica cualquier elemento no reivindicado esencial para la práctica de la invención.
No debe interpretarse la agrupación de elementos o de realizaciones alternativas divulgadas en el presente documento como limitaciones. Cada miembro del grupo puede estar indicado y reivindicado individualmente o en cualquier combinación con otros miembros del grupo u otros elementos encontrados en el presente documento. Se anticipa que uno o más miembros de un grupo puede ser incluido en, o eliminado de, un grupo por razones de conveniencia y/o de patentabilidad. Cuando se produce cualquiera de dichas inclusiones o deleciones, se considera que la memoria descriptiva contiene el grupo como se ha modificado, cumpliendo por tanto la descripción escrita de todos los grupos de Markush usados en las reivindicaciones adjuntas.
En el presente documento se describen ciertas realizaciones, que incluyen el mejor modo conocido por el inventor para llevar a cabo el espíritu de la presente divulgación. Por supuesto, para los expertos habituales en la técnica serán evidentes variaciones de estas realizaciones descritas tras la lectura de la anterior descripción. El inventor espera que los artesanos expertos empleen dichas variaciones según sea apropiado, y el inventor pretende que la invención se lleve a la práctica de un modo distinto al descrito específicamente en el presente documento.
En conclusión, debe entenderse que las realizaciones divulgadas en el presente documento son ilustrativas de los principios de las reivindicaciones. Otras modificaciones que pudieran emplearse están en el ámbito de las reivindicaciones. Por lo tanto, a modo de ejemplo, pero no como limitación, pueden utilizarse realizaciones alternativas de acuerdo con las enseñanzas del presente documento. Por consiguiente, las reivindicaciones no están limitadas a las realizaciones exactamente como se muestra y se describe.
Claims (13)
1. Un marcador magnético para el mareaje de un sitio en un tejido del cuerpo, comprendiendo el marcador al menos un material magnéticamente blando que tiene una coercitividad magnética menor de 7,96 kA/m (100 Oe) con una susceptibilidad de la masa magnética de >0,05 m3 kg-1 y siendo elástica o flexiblemente deformable entre una configuración compactada no esférica antes del despliegue, que tiene un mayor cociente entre la respuesta magnética máxima y la respuesta magnética mínima (anisotropía de la susceptibilidad magnética) y una configuración desplegada descompactada después del despliegue, en donde el marcador tiene una menor anisotropía de la susceptibilidad magnética de menos de 5.
2. El marcador magnético de la reivindicación 1 en donde el cociente de aspecto del marcador antes del despliegue es mayor de 4.
3. El marcador magnético de la reivindicación 1 en donde la configuración compactada no esférica antes del despliegue tiene anisotropía de la susceptibilidad magnética mayor de 5.
4. El marcador magnético de una cualquiera de las reivindicaciones anteriores en donde el marcador comprende un hilo o una forma cilíndrica elástica o flexiblemente deformable que durante el despliegue forma una estructura o malla de hilo.
5. El marcador magnético de una cualquiera de las reivindicaciones 1 a 4 en donde el marcador comprende un material magnético amorfo.
6. El marcador magnético de la reivindicación 1 en donde el marcador es deformable flexiblemente entre la configuración compactada no esférica, que tiene un mayor cociente de anisotropía del área proyectada, y la configuración desplegada descompactada, que tiene un menor cociente de anisotropía del área proyectada, siendo dicho cociente de anisotropía del área proyectada un cociente entre el área proyectada mínima y un área proyectada máxima del marcador en todas las direcciones, en donde un marcador que tiene un área proyectada uniforme en todas las direcciones tiene un cociente de 1.
7. El marcador magnético de la reivindicación 1 en donde la configuración compactada no esférica tiene la forma seleccionada del grupo que comprende un cilindro, un cable, una microesfera, una forma de "mancuerna" y un ovillo.
8. El marcador magnético de la reivindicación 7 en donde el cilindro o el cable está adaptado para flexionarse tras su colocación en el tejido.
9. El marcador magnético de la reivindicación 1 que comprende una pluralidad de elementos materiales magnéticamente blandos unidos por bisagras que se deforman en una forma durante el despliegue.
10. El marcador magnético de la reivindicación 1 en donde el marcador comprende dos o más elementos conectados por una conexión formada a partir de un material elástico o deformable flexiblemente de forma que durante el despliegue, los dos o más elementos forman una estructura que incluye un tetraedro o parte del mismo, que tiene la menor anisotropía de la susceptibilidad magnética.
11. El marcador magnético de la reivindicación 1 en donde la configuración desplegada descompactada tiene una anisotropía de la susceptibilidad magnética menor de 3.
12. El marcador magnético de una cualquiera de las reivindicaciones anteriores en donde el material magnético blando tiene una coercitividad magnética menor de 3,98 kA/m (50 Oe).
13. Un dispositivo de administración basado en un aguja o en una cánula que contiene un marcador magnético de acuerdo con una cualquiera de las reivindicaciones anteriores, en donde el dispositivo de administración basado en una aguja o en una cánula restringe el marcador en su configuración compactada no esférica, expandiéndose el marcador hasta su configuración desplegada descompactada tras su despliegue desde el dispositivo basado en un aguja o en una cánula.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562170768P | 2015-06-04 | 2015-06-04 | |
| PCT/GB2016/051649 WO2016193753A2 (en) | 2015-06-04 | 2016-06-03 | Marker materials and forms for magnetic marker localization (mml) |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| ES2833377T3 true ES2833377T3 (es) | 2021-06-15 |
Family
ID=56119700
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| ES16728722T Active ES2833377T3 (es) | 2015-06-04 | 2016-06-03 | Materiales marcadores y formas de localizar un marcador magnético |
Country Status (10)
| Country | Link |
|---|---|
| US (3) | US10595957B2 (es) |
| EP (3) | EP4085866A3 (es) |
| JP (1) | JP6821665B2 (es) |
| KR (1) | KR102589814B1 (es) |
| CN (2) | CN113558782A (es) |
| AU (1) | AU2016272550B2 (es) |
| CA (1) | CA2988065C (es) |
| ES (1) | ES2833377T3 (es) |
| MX (1) | MX2017015588A (es) |
| WO (1) | WO2016193753A2 (es) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9936892B1 (en) | 2009-05-04 | 2018-04-10 | Cortex Manufacturing Inc. | Systems and methods for providing a fiducial marker |
| US11883246B2 (en) | 2012-11-21 | 2024-01-30 | Trustees Of Boston University | Tissue markers and uses thereof |
| EP3302700A1 (en) * | 2015-06-04 | 2018-04-11 | Koninklijke Philips N.V. | Determination of positions of objects, such as brachytherapy seeds |
| CN105852984B (zh) * | 2016-03-23 | 2020-02-18 | 堃博生物科技(上海)有限公司 | 肺内标记物 |
| JP2019535339A (ja) * | 2016-09-09 | 2019-12-12 | サニーブルック リサーチ インスティテュート | 磁気的な潜在的病変の位置特定と画像化のためのシステムおよび方法 |
| GB2582123B (en) * | 2018-01-25 | 2021-04-28 | Endomagnetics Ltd | Systems and methods for detecting magnetic markers for surgical guidance |
| GB2573500B (en) | 2018-03-23 | 2020-11-04 | Endomagnetics Ltd | Magnetic markers for surgical guidance |
| WO2020077207A1 (en) | 2018-10-12 | 2020-04-16 | Focal Therapeutics Inc. | Tissue localization device and method of use thereof |
| WO2020154934A1 (zh) * | 2019-01-30 | 2020-08-06 | 唐山哈船科技有限公司 | 手术辅助定位器 |
| KR102251651B1 (ko) * | 2019-03-19 | 2021-05-14 | 오스템임플란트 주식회사 | 파노라믹 영상 생성을 위한 커브 라인 자동 생성방법 및 이를 위한 치과영상 처리장치 |
| CN113873963A (zh) * | 2019-05-30 | 2021-12-31 | Devicor医疗产业收购公司 | 用于有限迁移的活检部位标记物 |
| GB2585034A (en) * | 2019-06-25 | 2020-12-30 | Endomagnetics Ltd | Hyperthermia implants and a method and system for heating the implant |
| JP7273428B2 (ja) * | 2019-07-10 | 2023-05-15 | 京都府公立大学法人 | 医療用イメージガイダンスマーカー |
| US20230329832A1 (en) * | 2019-10-23 | 2023-10-19 | Clemson University | A Breast Tissue Marker and Localization System |
| US11166782B1 (en) | 2020-07-19 | 2021-11-09 | Sirius Medical Systems B.V. | Implantable marker and a method of implanting markers |
| CN116096462A (zh) * | 2020-10-07 | 2023-05-09 | 卡姆汤姆萨姆有限责任公司 | 放射治疗参考定位标记 |
| JPWO2023007702A1 (es) * | 2021-07-30 | 2023-02-02 | ||
| GB2612598B (en) * | 2021-11-03 | 2024-03-20 | Endomagnetics Ltd | Magnetic markers for imaging and surgical guidance |
| GB2620722A (en) | 2022-04-05 | 2024-01-24 | Endomagnetics Ltd | Improvements in or relating to susceptibility probes for detecting surgical markers |
| GB2617357A (en) | 2022-04-05 | 2023-10-11 | Endomagnetics Ltd | Improvements in or relating to susceptibility probes for detecting surgical markers |
Family Cites Families (175)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2614164A (en) | 1947-11-12 | 1952-10-14 | Schlumberger Well Surv Corp | Mutual inductance system |
| US3449662A (en) | 1963-10-16 | 1969-06-10 | American Mach & Foundry | Magnetic inspection method and apparatus using resilient magnetizing means and resilient sensors |
| US3445928A (en) | 1966-03-25 | 1969-05-27 | Bunker Ramo | Magnetometer method of manufacture |
| US3492566A (en) | 1967-09-01 | 1970-01-27 | Canadian Patents Dev | Three dimensional magnetic anisotropic susceptibility meter |
| US4324255A (en) | 1980-03-07 | 1982-04-13 | Barach John P | Method and apparatus for measuring magnetic fields and electrical currents in biological and other systems |
| GB2109112A (en) | 1981-10-06 | 1983-05-25 | Pantatron Systems Limited | Eddy current test probe |
| JPH0768117B2 (ja) | 1983-05-06 | 1995-07-26 | ベスター・インコーポレイテツド | 薬剤放出調整用小胞製剤 |
| US4823113A (en) * | 1986-02-27 | 1989-04-18 | Allied-Signal Inc. | Glassy alloy identification marker |
| US5055288A (en) | 1987-06-26 | 1991-10-08 | Advanced Magnetics, Inc. | Vascular magnetic imaging method and agent comprising biodegradeable superparamagnetic metal oxides |
| US5261403A (en) | 1987-03-30 | 1993-11-16 | Hitachi, Ltd. | Magnetic resonance imaging apparatus |
| US5414356A (en) | 1987-09-21 | 1995-05-09 | Hitachi, Ltd. | Fluxmeter including squid and pickup coil with flux guiding core and method for sensing degree of deterioration of an object |
| US4825162A (en) | 1987-12-07 | 1989-04-25 | General Electric Company | Nuclear magnetic resonance (NMR) imaging with multiple surface coils |
| JP2613275B2 (ja) | 1988-09-16 | 1997-05-21 | 株式会社日立製作所 | 超電導量子干渉素子を用いた磁束計 |
| EP0390935A1 (de) | 1989-03-29 | 1990-10-10 | Siemens Aktiengesellschaft | Verfahren zum Kalibrieren von Mehrkanal-Squid-Systemen mit Gradiometern beliebiger Ordnung |
| US5442289A (en) | 1989-07-31 | 1995-08-15 | Biomagnetic Technologies, Inc. | Biomagnetometer having flexible sensor |
| DE4003330A1 (de) | 1990-02-05 | 1991-08-08 | Foerster Inst Dr Friedrich | Wirbelstrompruefgeraet |
| US5005001A (en) | 1990-04-05 | 1991-04-02 | Pitney Bowes Inc. | Field generation and reception system for electronic article surveillance |
| CA2088918C (en) | 1991-06-04 | 1996-07-02 | Seigo Ando | Magnetic detecting method and apparatus therefor |
| US5293119A (en) | 1992-02-20 | 1994-03-08 | Sqm Technology, Inc. | Electromagnetic microscope for evaluation of electrically conductive and magnetic materials |
| JP2882167B2 (ja) | 1992-03-06 | 1999-04-12 | ダイキン工業株式会社 | Squid磁束計 |
| FR2689638B1 (fr) | 1992-04-06 | 1996-08-09 | Aerospatiale | Capteur a courants de foucault. |
| US5313192A (en) * | 1992-07-02 | 1994-05-17 | Sensormatic Electronics Corp. | Deactivatable/reactivatable magnetic marker having a step change in magnetic flux |
| ATE179185T1 (de) | 1992-08-05 | 1999-05-15 | Meito Sangyo Kk | Verbundmaterial mit kleinem durchmesser, welches ein wasserlösliches carboxylpolysaccharid und magnetisches eisenoxid enthaltet |
| DE4226814A1 (de) | 1992-08-13 | 1994-02-17 | Philips Patentverwaltung | Spulenanordnung für MR-Untersuchungen der Mamma |
| US6023165A (en) | 1992-09-28 | 2000-02-08 | Fonar Corporation | Nuclear magnetic resonance apparatus and methods of use and facilities for incorporating the same |
| US5575794A (en) | 1993-02-12 | 1996-11-19 | Walus; Richard L. | Tool for implanting a fiducial marker |
| JPH06324021A (ja) | 1993-03-16 | 1994-11-25 | Hitachi Ltd | 非破壊検査装置 |
| US5537037A (en) | 1993-03-16 | 1996-07-16 | Hitachi, Ltd. | Apparatus with cancel coil assembly for cancelling a field parallel to an axial direction to the plural coils and to a squid pick up coil |
| DE69433588T2 (de) | 1993-04-26 | 2005-02-03 | St. Louis University | Anzeige der lage einer sonde |
| US5590654A (en) | 1993-06-07 | 1997-01-07 | Prince; Martin R. | Method and apparatus for magnetic resonance imaging of arteries using a magnetic resonance contrast agent |
| US5363845A (en) | 1993-08-13 | 1994-11-15 | Medical Advances, Inc. | Breast coil for magnetic resonance imaging |
| BE1007459A3 (nl) | 1993-08-24 | 1995-07-04 | Philips Electronics Nv | Magnetisch resonantie apparaat. |
| US5437280A (en) | 1993-09-20 | 1995-08-01 | Hussman; Karl L. | Magnetic resonance breast localizer |
| JPH0815229A (ja) | 1994-06-27 | 1996-01-19 | Mitsubishi Heavy Ind Ltd | 高分解能渦電流探傷装置 |
| US5402094A (en) | 1994-08-15 | 1995-03-28 | Enge; Harald A. | MRI mammography magnet |
| DE69534233T2 (de) | 1994-09-16 | 2005-10-27 | Ethicon Endo-Surgery, Inc., Cincinnati | Vorrichtungen zum bestimmen und markieren von gewebe |
| JP3910222B2 (ja) | 1995-03-10 | 2007-04-25 | 株式会社豊田中央研究所 | 疲労度測定装置 |
| US5657756A (en) | 1995-06-07 | 1997-08-19 | Ctf Systems Inc. | Method and systems for obtaining higher order gradiometer measurements with lower order gradiometers |
| JP3580905B2 (ja) | 1995-06-13 | 2004-10-27 | 大日本印刷株式会社 | 磁気センサ |
| JP3499054B2 (ja) | 1995-07-11 | 2004-02-23 | 独立行政法人 国立印刷局 | 安全保護紙の真偽判定装置 |
| US5842986A (en) | 1995-08-16 | 1998-12-01 | Proton Sciences Corp. | Ferromagnetic foreign body screening method and apparatus |
| DE19532676C1 (de) | 1995-09-05 | 1997-05-07 | Inst Physikalische Hochtech Ev | Anordnung zur Bestimmung der Position eines Markers in einem Hohlraum innerhalb des Organismus eines Lebewesens |
| BR9707081A (pt) | 1996-01-25 | 1999-05-25 | Schering Ag | Soluções de injeção e infusão concentradas aperfeiçoadas para aplicação intravasal |
| JP2000509014A (ja) | 1996-03-11 | 2000-07-18 | フォーカル,インコーポレイテッド | 放射性核種および放射性医薬品のポリマー送達 |
| US6549800B1 (en) | 1996-04-25 | 2003-04-15 | Johns Hopkins Unversity School Of Medicine | Methods for in vivo magnetic resonance imaging |
| JPH1038854A (ja) | 1996-07-17 | 1998-02-13 | Agency Of Ind Science & Technol | 導電性材料の非破壊検査方法および装置 |
| EP1284123B1 (en) | 1996-08-12 | 2005-07-20 | Ethicon Endo-Surgery, Inc. | Apparatus for marking tissue |
| WO1998007052A1 (en) | 1996-08-16 | 1998-02-19 | Jon Neal Weaver | Anti-shoplifting security system |
| US5844140A (en) | 1996-08-27 | 1998-12-01 | Seale; Joseph B. | Ultrasound beam alignment servo |
| US5997473A (en) | 1996-09-06 | 1999-12-07 | Olympus Optical Co., Ltd. | Method of locating a coil which consists of determining the space occupied by a source coil generating a magnetic field |
| DE29724862U1 (de) | 1996-09-18 | 2004-12-30 | Ifm Electronic Gmbh | Induktiver Näherungsschalter |
| US6304075B1 (en) | 1996-12-27 | 2001-10-16 | Bic-Niesse GmbH —Business and Innovation Centre in der Euroregion Neisse | Magnetic resonance sensor |
| US6406420B1 (en) | 1997-01-02 | 2002-06-18 | Myocor, Inc. | Methods and devices for improving cardiac function in hearts |
| WO2000045697A1 (en) | 1997-02-27 | 2000-08-10 | Uri Rapoport | Method and apparatus for detecting a magnetically responsive substance |
| GB9712524D0 (en) | 1997-06-16 | 1997-08-20 | Nycomed Imaging As | Method |
| FR2770779B1 (fr) | 1997-11-10 | 2000-07-21 | Bernstein Veronique | Solute hypotonique ou hypoosmolaire au plasma utilise dans le traitement de la cellulite, les fibroses, et de l'hirsutisme |
| US6270464B1 (en) | 1998-06-22 | 2001-08-07 | Artemis Medical, Inc. | Biopsy localization method and device |
| US6205352B1 (en) | 1997-11-19 | 2001-03-20 | Oncology Innovations, Inc. | Sentinel node identification using non-isotope means |
| CA2260703A1 (en) | 1998-04-07 | 1999-10-07 | Dennis W. Szymaitis | Disposal container for detecting, distinguishing and counting objects |
| US6161034A (en) | 1999-02-02 | 2000-12-12 | Senorx, Inc. | Methods and chemical preparations for time-limited marking of biopsy sites |
| US6347241B2 (en) | 1999-02-02 | 2002-02-12 | Senorx, Inc. | Ultrasonic and x-ray detectable biopsy site marker and apparatus for applying it |
| US5941890A (en) | 1998-06-26 | 1999-08-24 | Ethicon Endo-Surgery, Inc. | Implantable surgical marker |
| US6419847B1 (en) * | 1998-11-26 | 2002-07-16 | Sumitomo Special Metals Co., Ltd. | Ferrite magnet powder and magnet using said magnet powder, and method for preparing them |
| US6371904B1 (en) | 1998-12-24 | 2002-04-16 | Vivant Medical, Inc. | Subcutaneous cavity marking device and method |
| US6356782B1 (en) | 1998-12-24 | 2002-03-12 | Vivant Medical, Inc. | Subcutaneous cavity marking device and method |
| US6230038B1 (en) | 1999-02-01 | 2001-05-08 | International Business Machines Corporation | Imaging of internal structures of living bodies by sensing implanted magnetic devices |
| US6862470B2 (en) | 1999-02-02 | 2005-03-01 | Senorx, Inc. | Cavity-filling biopsy site markers |
| US6725083B1 (en) | 1999-02-02 | 2004-04-20 | Senorx, Inc. | Tissue site markers for in VIVO imaging |
| US7983734B2 (en) | 2003-05-23 | 2011-07-19 | Senorx, Inc. | Fibrous marker and intracorporeal delivery thereof |
| US6173715B1 (en) | 1999-03-01 | 2001-01-16 | Lucent Medical Systems, Inc. | Magnetic anatomical marker and method of use |
| GB9908179D0 (en) * | 1999-04-09 | 1999-06-02 | Univ Cambridge Tech | Magnetic materials |
| AU4656400A (en) | 1999-04-21 | 2000-11-17 | Government of The United States of America, as represented by The Secretary Department of Health & Human Services, The National Institutes of Health, The | Method for enhancing contrast produced by mri |
| US6292678B1 (en) * | 1999-05-13 | 2001-09-18 | Stereotaxis, Inc. | Method of magnetically navigating medical devices with magnetic fields and gradients, and medical devices adapted therefor |
| US6766186B1 (en) | 1999-06-16 | 2004-07-20 | C. R. Bard, Inc. | Post biospy tissue marker and method of use |
| JP2001000430A (ja) | 1999-06-24 | 2001-01-09 | Alcare Co Ltd | 画像撮影用のマ−カ− |
| WO2001008578A1 (en) * | 1999-07-30 | 2001-02-08 | Vivant Medical, Inc. | Device and method for safe location and marking of a cavity and sentinel lymph nodes |
| US6835572B1 (en) | 1999-10-18 | 2004-12-28 | Institute For Magnetic Resonance Research | Magnetic resonance spectroscopy of breast biopsy to determine pathology, vascularization and nodal involvement |
| JP2001255358A (ja) | 2000-03-10 | 2001-09-21 | Sumitomo Electric Ind Ltd | 磁気センサ |
| AU2001251348A1 (en) | 2000-04-07 | 2001-10-23 | The Johns-Hopkins University | Apparatus for sensing human prostate tumor |
| US6889073B2 (en) | 2000-05-08 | 2005-05-03 | David A. Lampman | Breast biopsy and therapy system for magnetic resonance imagers |
| JP2002004118A (ja) * | 2000-06-21 | 2002-01-09 | Unitika Ltd | 徘徊患者用衣服 |
| AU2001273133A1 (en) | 2000-08-10 | 2002-02-25 | Cook Incorporated | Localizer needle |
| US6394965B1 (en) | 2000-08-15 | 2002-05-28 | Carbon Medical Technologies, Inc. | Tissue marking using biocompatible microparticles |
| AU2003267309A1 (en) | 2000-11-16 | 2004-04-08 | Microspherix Llc | Flexible and/or elastic brachytherapy seed or strand |
| DE60043788D1 (de) | 2000-11-17 | 2010-03-18 | Calypso Medical Inc | System zur lokalisierung und definition einer zielposition in einem menschlichen körper |
| AU2002239290A1 (en) | 2000-11-20 | 2002-06-03 | Senorx, Inc. | Tissue site markers for in vivo imaging |
| FR2823092B1 (fr) | 2001-04-10 | 2004-03-05 | Eurorad 2 6 | Dispositif per-operatoire pour la localisation de tissus marques et procede utilisant un tel dispositif |
| AU2002307762A1 (en) * | 2001-04-18 | 2002-10-28 | Bbms Ltd. | Navigating and maneuvering of an in vivo vechicle by extracorporeal devices |
| JP4193382B2 (ja) | 2001-07-19 | 2008-12-10 | 株式会社日立製作所 | 磁場計測装置 |
| US6850065B1 (en) | 2001-07-27 | 2005-02-01 | General Electric Company | MRI coil system for breast imaging |
| US6592608B2 (en) | 2001-12-07 | 2003-07-15 | Biopsy Sciences, Llc | Bioabsorbable sealant |
| ITSV20010029A1 (it) | 2001-08-14 | 2003-02-14 | Esaote Spa | Macchina per il rilevamento di immagini in risonanza magnetica nucleare (mri) |
| US20030141868A1 (en) | 2001-08-23 | 2003-07-31 | Bakharev Alexander A. | High balance gradiometer |
| US7135978B2 (en) | 2001-09-14 | 2006-11-14 | Calypso Medical Technologies, Inc. | Miniature resonating marker assembly |
| US7701209B1 (en) | 2001-10-05 | 2010-04-20 | Fonar Corporation | Coils for horizontal field magnetic resonance imaging |
| WO2006067692A2 (en) | 2004-12-22 | 2006-06-29 | Philips Intellectual Property & Standards Gmbh | Arrangement and method for determining the spatial distribution of magnetic particles |
| JP4090722B2 (ja) | 2001-10-23 | 2008-05-28 | 純一 小川 | 磁性流体検出装置 |
| US20030216632A1 (en) | 2001-10-29 | 2003-11-20 | Mednovus, Inc. | Ferromagnetic sensing method and apparatus |
| JP2003149212A (ja) | 2001-11-09 | 2003-05-21 | Japan Science & Technology Corp | 非破壊検査装置 |
| WO2003048810A2 (en) | 2001-12-03 | 2003-06-12 | Fabian Carl E | Portable surgical implement detector |
| IL162483A (en) | 2001-12-14 | 2010-11-30 | Monteris Medical Inc | Hyperthermia treatment apparatus and probe therefor |
| JP2003315373A (ja) | 2002-04-18 | 2003-11-06 | Toshiba Corp | 電流検出装置及び半導体装置 |
| US7329414B2 (en) * | 2002-05-03 | 2008-02-12 | Biopsy Sciences, Llc | Biodegradable polymer for marking tissue and sealing tracts |
| JP4221192B2 (ja) | 2002-06-14 | 2009-02-12 | 株式会社日立ハイテクノロジーズ | 生体磁気計測装置 |
| US20040162477A1 (en) | 2002-10-04 | 2004-08-19 | Olympus Corporation | Apparatus for detecting magnetic fluid identifying sentinel-lymph node |
| US20060173283A1 (en) | 2002-11-27 | 2006-08-03 | Oskar Axelsson | Method of magnetic resonance imaging |
| DE60231925D1 (de) | 2002-12-13 | 2009-05-20 | E O Ospedali Galliera | Suszeptibilitätmessgerät zur nichtinvasiven messung des eisengehalts in einem körper |
| US7009398B2 (en) | 2003-03-20 | 2006-03-07 | Siemens Aktiengesellschaft | Portable magnetic resonance surface coil unit with an access opening for manual gripping |
| US7877133B2 (en) | 2003-05-23 | 2011-01-25 | Senorx, Inc. | Marker or filler forming fluid |
| US7783336B2 (en) | 2003-06-06 | 2010-08-24 | Ethicon Endo-Surgery, Inc. | Subcutaneous biopsy cavity marker device |
| US7744852B2 (en) | 2003-07-25 | 2010-06-29 | Rubicor Medical, Llc | Methods and systems for marking post biopsy cavity sites |
| US20050033157A1 (en) | 2003-07-25 | 2005-02-10 | Klein Dean A. | Multi-modality marking material and method |
| US7001341B2 (en) | 2003-08-13 | 2006-02-21 | Scimed Life Systems, Inc. | Marking biopsy sites |
| US7084631B2 (en) | 2003-11-19 | 2006-08-01 | General Electric Company | Magnetic resonance imaging array coil system and method for breast imaging |
| EP1541083A3 (en) | 2003-12-09 | 2006-03-01 | Olympus Corporation | Magnetic fluid detection device |
| JP4217599B2 (ja) | 2003-12-09 | 2009-02-04 | オリンパス株式会社 | 磁性流体検出装置 |
| US8118754B1 (en) | 2007-11-15 | 2012-02-21 | Flynn Edward R | Magnetic needle biopsy |
| US7386338B2 (en) | 2004-04-30 | 2008-06-10 | General Electric Company | Bilateral imaging apparatus |
| US7708751B2 (en) | 2004-05-21 | 2010-05-04 | Ethicon Endo-Surgery, Inc. | MRI biopsy device |
| JP3896489B2 (ja) | 2004-07-16 | 2007-03-22 | 国立大学法人 岡山大学 | 磁気検知装置及び物質判定装置 |
| US7116094B2 (en) | 2004-07-28 | 2006-10-03 | International Business Machines Corporation | Apparatus and method for transmission and remote sensing of signals from integrated circuit devices |
| US20080097199A1 (en) * | 2004-08-20 | 2008-04-24 | David Mullen | Tissue Marking Devices and Systems |
| US20060074295A1 (en) | 2004-10-01 | 2006-04-06 | Nexgen | Combined MR coil technology in medical devices |
| US20060079805A1 (en) * | 2004-10-13 | 2006-04-13 | Miller Michael E | Site marker visable under multiple modalities |
| US8060183B2 (en) | 2004-10-13 | 2011-11-15 | Suros Surgical Systems, Inc. | Site marker visible under multiple modalities |
| US8280486B2 (en) | 2004-10-13 | 2012-10-02 | Suros Surgical Systems, Inc. | Site marker visable under multiple modalities |
| US20100125191A1 (en) | 2004-11-18 | 2010-05-20 | Nedim Turan Sahin | Mri as a therapeutic device |
| WO2006056739A2 (en) | 2004-11-23 | 2006-06-01 | Quantum Medical Technology Limited | Surgical tag, magnetometer, and associated system |
| EP1830704A2 (en) * | 2004-12-22 | 2007-09-12 | Koninklijke Philips Electronics N.V. | Marker for position determination with a magnetic method |
| DE102005002944A1 (de) * | 2005-01-18 | 2006-07-27 | Charité - Universitätsmedizin Berlin (Charité) | Endoskopisches Markierungsmittel sowie Instrumente zur Applikation und Detektion des Markierungsmittels sowie zur operativen Fixierung des markierten Gewebebereichs |
| US8467849B2 (en) | 2005-02-03 | 2013-06-18 | ORGAMEND Inc. | Magnetic resonance imaging device |
| US7842178B2 (en) * | 2005-04-18 | 2010-11-30 | University Of Iowa Research Foundation | Magnet incorporated electrically conductive electrodes |
| GB2425610A (en) | 2005-04-29 | 2006-11-01 | Univ London | Magnetic properties sensing system |
| US7831293B2 (en) | 2005-05-10 | 2010-11-09 | Advanced Clinical Solutions, Inc. | Method of defining a biological target for treatment |
| US20060293581A1 (en) | 2005-05-12 | 2006-12-28 | Sunnybrook And Women's College Health Sciences Centre | Marker device for X-ray, ultrasound and MR imaging |
| US7570056B2 (en) | 2005-08-10 | 2009-08-04 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus |
| GB0519391D0 (en) | 2005-09-22 | 2005-11-02 | Aion Diagnostics Ltd | Imaging agents |
| ATE536140T1 (de) * | 2005-09-30 | 2011-12-15 | Cook Medical Technologies Llc | Beschichtete gefässverschlussvorrichtung |
| US7479784B2 (en) | 2005-10-12 | 2009-01-20 | New York University | Arrangements, systems and methods for facilitating and collecting information associated with fluxes of magnetic fields provided at various angles from one another |
| EP1942868B2 (en) | 2005-11-01 | 2023-10-04 | Wyeth LLC | Sodium chloride solution for drug reconstitution or dilution |
| US8193804B2 (en) | 2005-11-16 | 2012-06-05 | Rex Chin-Yih Hong | Device for measuring AC magnetization of materials |
| US7702378B2 (en) | 2005-11-17 | 2010-04-20 | Breast-Med, Inc. | Tissue marker for multimodality radiographic imaging |
| US8078260B2 (en) | 2006-05-02 | 2011-12-13 | ORGAMEND Inc. | Method for improving magnetic resonance imaging of the breast |
| US8064987B2 (en) | 2006-10-23 | 2011-11-22 | C. R. Bard, Inc. | Breast marker |
| US20090024022A1 (en) | 2006-10-25 | 2009-01-22 | Siemens Corporate Research, Inc. | System and method for lymph node imaging using co-registration of ct and mr imagery |
| US20080124281A1 (en) * | 2006-11-29 | 2008-05-29 | Board Of Regents, The University Of Texas System | Nanotubular probes as ultrasensitive mr contrast agent |
| US20080146914A1 (en) | 2006-12-19 | 2008-06-19 | General Electric Company | System, method and apparatus for cancer imaging |
| DE102007009016A1 (de) | 2007-02-23 | 2008-08-28 | Siemens Ag | Markierung und Verfahren zur Positionsbestimmung eines Zielgewebes |
| US20080228164A1 (en) | 2007-03-14 | 2008-09-18 | Nicoson Zachary R | Implant delivery system |
| US8062215B2 (en) | 2007-04-13 | 2011-11-22 | Ethicon Endo-Surgery, Inc. | Fluorescent nanoparticle scope |
| WO2008131391A1 (en) | 2007-04-23 | 2008-10-30 | Device Evolutions, Llc | Surgical metal detection apparatus and methods |
| US8137320B2 (en) | 2007-05-01 | 2012-03-20 | Suros Surgical Systems, Inc. | Securement for a surgical site marker and deployment device for same |
| US9763597B2 (en) | 2007-05-03 | 2017-09-19 | Wisconsin Alumni Research Foundation | Local MRI breast coil and method of use |
| US20090082662A1 (en) | 2007-09-24 | 2009-03-26 | Israel Henry M | Mri breast image magnet structure |
| DE102007046186A1 (de) | 2007-09-26 | 2009-04-02 | Amedo Smart Tracking Solutions Gmbh | Gewebemarkierung |
| US8731635B2 (en) | 2007-11-07 | 2014-05-20 | University of Pittsburgh—of the Commonwealth System of Higher Education | Coils for magnetic resonance spectroscopy and imaging of human breast |
| WO2009103938A1 (en) * | 2008-02-22 | 2009-08-27 | University Of Exeter | Controllable magnetic systems |
| DE102008015781B4 (de) * | 2008-03-26 | 2011-09-29 | Malte Neuss | Vorrichtung zum Verschluss von Defekten im Gefäßsystem |
| US8050742B2 (en) | 2008-07-30 | 2011-11-01 | Devicor Medical Products, Inc. | Biopsy device |
| DE102008048291B4 (de) | 2008-09-22 | 2012-02-16 | Siemens Aktiengesellschaft | Brustspulenanordnung für Magnetresonanzanwendungen |
| GB2465771A (en) * | 2008-11-28 | 2010-06-02 | Helyn Margaret Wright | Surgical Localisation Device |
| ES2843628T3 (es) | 2009-06-26 | 2021-07-19 | Cianna Medical Inc | Sistema para localizar marcadores o estructuras de tejido dentro un cuerpo |
| GB0916334D0 (en) | 2009-09-17 | 2009-10-28 | Renovo Ltd | Inhibition of tendon adhesions |
| US9427186B2 (en) | 2009-12-04 | 2016-08-30 | Endomagnetics Ltd. | Magnetic probe apparatus |
| US10634741B2 (en) | 2009-12-04 | 2020-04-28 | Endomagnetics Ltd. | Magnetic probe apparatus |
| JP5678565B2 (ja) | 2009-12-08 | 2015-03-04 | Jnc株式会社 | 磁性微粒子およびその製造方法 |
| US8870898B2 (en) | 2010-01-05 | 2014-10-28 | GI Windows, Inc. | Self-assembling magnetic anastomosis device having an exoskeleton |
| JP2012177691A (ja) * | 2011-02-04 | 2012-09-13 | Hitachi Maxell Ltd | 磁性マーカー粒子 |
| DE102011081445A1 (de) * | 2011-08-23 | 2013-02-28 | Epflex Feinwerktechnik Gmbh | Medizinischer Führungsdraht und Herstellungsverfahren |
| JP5924641B2 (ja) * | 2011-10-17 | 2016-05-25 | 学校法人東京電機大学 | 医療用チューブの先端位置検出システムおよび当該システムに適用する医療用チューブ |
| US8798716B1 (en) * | 2011-11-03 | 2014-08-05 | Solstice Corporation | Fiducial markers and related methods |
| EP2809256B1 (en) * | 2012-02-01 | 2017-07-12 | Koninklijke Philips N.V. | Multimodal fiducial marker and marker arrangement |
| US20140018663A1 (en) * | 2012-07-16 | 2014-01-16 | Endomagnetics Ltd. | Magnetic Marker for Surgical Localization |
| WO2014140543A1 (en) | 2013-03-11 | 2014-09-18 | Endomagnetics Ltd. | Hypoosmotic solutions for lymph node detection |
| JP6305869B2 (ja) * | 2014-08-19 | 2018-04-04 | 日立建機株式会社 | 建設機械用エンジン制御装置 |
-
2016
- 2016-06-03 ES ES16728722T patent/ES2833377T3/es active Active
- 2016-06-03 KR KR1020187000167A patent/KR102589814B1/ko active IP Right Grant
- 2016-06-03 EP EP22176363.4A patent/EP4085866A3/en active Pending
- 2016-06-03 US US15/172,187 patent/US10595957B2/en active Active
- 2016-06-03 CN CN202110644795.XA patent/CN113558782A/zh active Pending
- 2016-06-03 CN CN201680039792.0A patent/CN107920865B/zh active Active
- 2016-06-03 WO PCT/GB2016/051649 patent/WO2016193753A2/en active Application Filing
- 2016-06-03 CA CA2988065A patent/CA2988065C/en active Active
- 2016-06-03 EP EP20180295.6A patent/EP3782575A1/en active Pending
- 2016-06-03 EP EP16728722.6A patent/EP3302338B1/en active Active
- 2016-06-03 AU AU2016272550A patent/AU2016272550B2/en active Active
- 2016-06-03 MX MX2017015588A patent/MX2017015588A/es unknown
- 2016-06-03 JP JP2018515358A patent/JP6821665B2/ja active Active
-
2019
- 2019-11-19 US US16/688,318 patent/US11504207B2/en active Active
-
2022
- 2022-11-16 US US17/988,146 patent/US20230320811A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016193753A2 (en) | 2016-12-08 |
| CA2988065A1 (en) | 2016-12-08 |
| KR20180015234A (ko) | 2018-02-12 |
| EP4085866A2 (en) | 2022-11-09 |
| US11504207B2 (en) | 2022-11-22 |
| CN107920865A (zh) | 2018-04-17 |
| EP3302338B1 (en) | 2020-09-30 |
| WO2016193753A3 (en) | 2017-01-12 |
| AU2016272550B2 (en) | 2021-01-28 |
| US20160354178A1 (en) | 2016-12-08 |
| US20200121415A1 (en) | 2020-04-23 |
| CN113558782A (zh) | 2021-10-29 |
| MX2017015588A (es) | 2018-04-13 |
| CN107920865B (zh) | 2021-07-09 |
| CA2988065C (en) | 2024-03-26 |
| JP6821665B2 (ja) | 2021-01-27 |
| KR102589814B1 (ko) | 2023-10-13 |
| JP2018526160A (ja) | 2018-09-13 |
| EP4085866A3 (en) | 2023-01-18 |
| US10595957B2 (en) | 2020-03-24 |
| US20230320811A1 (en) | 2023-10-12 |
| AU2016272550A1 (en) | 2018-01-18 |
| EP3302338A2 (en) | 2018-04-11 |
| EP3782575A1 (en) | 2021-02-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| ES2833377T3 (es) | Materiales marcadores y formas de localizar un marcador magnético | |
| CN110074787B (zh) | 检测用于手术指导的磁性标记物的系统和方法 | |
| EP1615559B1 (en) | Method to determine the spatial distribution of magnetic particles and magnetic particle administering compositions | |
| JP5250778B2 (ja) | 棒状体 | |
| ES2861224T3 (es) | Dispositivos, sistemas y métodos para la administración de agentes terapéuticos asistidos por campo magnético | |
| CA2879083A1 (en) | Magnetic marker for surgical localization | |
| JP2014519375A (ja) | 位置決めマーカ | |
| Engelmann | Assessing magnetic fluid hyperthermia: magnetic relaxation simulation, modeling of nanoparticle uptake inside pancreatic tumor cells and in vitro efficacy | |
| CN109381259A (zh) | 跟踪包括铁磁流体的传感器的系统和方法 | |
| CA3234906A1 (en) | Magnetic markers for imaging and surgical guidance | |
| Luo et al. | Physical Properties, Toxicity, and Physiological Effects of Magnets | |
| AU2022381847B2 (en) | Improvements in or relating to implantable ferromagnetic markers |