EP2998260B1 - Aufzugsanlage mit kabine und gegengewicht - Google Patents
Aufzugsanlage mit kabine und gegengewicht Download PDFInfo
- Publication number
- EP2998260B1 EP2998260B1 EP15193206.8A EP15193206A EP2998260B1 EP 2998260 B1 EP2998260 B1 EP 2998260B1 EP 15193206 A EP15193206 A EP 15193206A EP 2998260 B1 EP2998260 B1 EP 2998260B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- counterweight
- elevator
- safety gear
- safety
- catch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 claims description 14
- 238000009434 installation Methods 0.000 description 18
- 239000000725 suspension Substances 0.000 description 7
- 238000001514 detection method Methods 0.000 description 6
- 238000004146 energy storage Methods 0.000 description 4
- 238000012806 monitoring device Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 108010066114 cabin-2 Proteins 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 125000000524 functional group Chemical group 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 239000003380 propellant Substances 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/12—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions in case of rope or cable slack
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/12—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions in case of rope or cable slack
- B66B5/125—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions in case of rope or cable slack electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/16—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well
- B66B5/18—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces
- B66B5/22—Braking or catch devices operating between cars, cages, or skips and fixed guide elements or surfaces in hoistway or well and applying frictional retarding forces by means of linearly-movable wedges
Definitions
- the invention relates to an elevator system with cabin and counterweight and with safety gears, which are mounted on the car and the counterweight.
- Elevator systems are installed in a building. They consist essentially of an elevator car, which are connected by carrying ropes or straps with a counterweight. By means of a drive which acts selectively on the suspension means, directly on the car or the counterweight, the car and the counterweight are moved along, substantially vertical, guide rails.
- the elevator system is used to transport people and goods within the building over single or multiple floors.
- the elevator system includes devices to secure the elevator car in the event of failure of the drive or the suspension means or to protect even with a stop in a floor from unwanted drifting or crashes.
- safety devices are usually used, which can slow down the elevator car on the guide rails in case of need. To date, such safety gears have been activated by mechanical speed limiters.
- electronic monitoring devices are also used today, which can activate braking or safety gear if required.
- electromechanical actuator units are required, which can operate with appropriate control safety gears.
- EP0543154 Such a device is known.
- an auxiliary caliper brake is required, with a guide rail engaged and this auxiliary caliper brake operates an existing lever system whereby safety gears are operated.
- This auxiliary clamp brake is designed to move the lever system and mass parts of the safety gear can.
- the required electromagnetic units must be dimensioned correspondingly large.
- brake systems or safety devices on the counterweight are also required in elevator installations. This is the case in particular if accessible spaces are present below the elevator shaft or if, for example, brake devices are required on the counterweight to prevent an uncontrolled upward movement.
- the invention thus aims to provide at least one alternative solution for the operation and possibly also for restoring a safety gear in an elevator installation by means of electrical control and its integration into the elevator installation.
- solutions for equipping the counterweight with braking or catching devices are to be shown, in which case the counterweight should also be dispensed with the use of a mechanical limiter.
- This solution or solutions should preferably be able to be combined with conventional safety gears.
- Other aspects such as a quick operation of the safety gear, low energy consumption, ease of installation, behavior of the device in case of power failure or component faults should be taken into account as far as possible.
- An elevator system is used to transport goods and people in buildings.
- the elevator system includes at least one elevator car for receiving persons and goods, and usually a counterweight.
- Counterweight and elevator car are about suspension such as a carrying rope, a strap or other types of suspension means interconnected. These support means are guided over a deflection roller, or a drive pulley, and the counterweight and the elevator car thus move in the same way in the building, or in an elevator shaft provided in the building.
- both the elevator car as well as the counterweight - to prevent is at least the elevator car and the counterweight with a safety gear equipped.
- the driving bodies each contain two catching devices, which are each assigned to a guide rail.
- the guide rails usually two guide rails - lead the carriage along the elevator shaft and they include a bridge on which the safety gear can intervene for the purpose of braking.
- One embodiment of a conventional safety gear includes two slips.
- the catch wedges are mounted and guided vertically displaceable in the safety gear. In normal operation of the elevator installation, the catch wedges are in a lower standby position. If necessary, the catch wedges are pushed by a device for actuating the safety gear, along an inclined track upwards until they clamp the web of the guide rail.
- the means for actuating and possibly also for restoring the safety gear includes a single pressure accumulator, which moves the two catch wedges of the above-explained safety gear, if necessary, substantially synchronously, from the standby position to the web of the guide rail in a catching position.
- the device preferably includes a remotely actuable reset device which can tension the accumulator back into a standby position. This takes place when the vehicle is to be released again after braking and checking the safety state of the elevator system.
- the common pressure accumulator allows safe operation of the safety gear, because both wedges can be operated simultaneously and without jamming.
- the common pressure accumulator can also be easily coupled to safety gears, for example via a lever system.
- a roller lock safety gear can be operated accordingly, being operated in such safety gear instead of catch wedges, fishing wheels or other similar catching organs.
- An embodiment of such a device for actuating and also for restoring the safety gear is disclosed in an application of the same applicant, with the file reference EP10195781.9 filed on the same priority date.
- Another solution for driving, or for operating a safety gear is another application of the same applicant disclosed, the file number EP10195791.8 filed on the same priority date.
- a driving body is used which can be controlled by means of electromagnet. The driving body is pressed in case of need to the guide rail and he can thereby actuate a coupled with the driving body safety gear.
- This embodiment is particularly suitable for safety gear, which can brake in both directions, as the driving body can operate the safety gear as a result of relative movement between the guide rail and safety gear.
- the device for the operation and possibly also for the provision of a safety gear is installed in a housing, or the housing is a part of the device.
- This housing is shaped and provided with connection plates, that the device can be attached to a safety gear or that it can be mounted together with the safety gear to the car, or the counterweight.
- today's safety gears are usually actuated by means of a lever mechanism, which is actuated by a governor rope.
- These safety gears usually include a lower connection point, which allows attachment of guide shoes.
- the present-shaped housing is now advantageously designed so that it can be attached to this junction.
- the connection plate is for example between guide shoe and entrained safety gear or it is mitschraschraubt between the vehicle body and safety gear.
- the means for actuating and possibly also for returning the safety gear to an existing elevator installation, or an existing safety gear can be grown. It is thus ideally suited for the modernization of elevator installations.
- the device for operating the safety gear can be used together with a corresponding safety gear in different configurations in elevator systems.
- a pair of safety gears with associated means for operating the safety gears are arranged on the car.
- the devices for actuating the safety gear are controlled by an electronic limiter and any reset device is controlled by a brake control unit.
- the electronic limiter controls, for example, directly or via the corresponding brake control unit, the electromagnets of the devices for actuation and occasionally also for restoring the safety gears.
- the electromagnets are preferably connected in series.
- the electronic limiter may be, for example, a speed monitoring device, as shown in the WO03004397 is used, or it may be a monitoring device which evaluates a rotational speed of rollers which roll on the cab along the guide rails, or it may be a safety supervisory system as shown in FIG EP1602610 is presented.
- the electronic limiter, or the associated device is advantageously equipped with electrical energy storage, such as batteries, batteries, capacitor bank. With the help of this energy storage, the safety device is kept active for a predetermined amount of time during a power failure in the building.
- electrical energy storage such as batteries, batteries, capacitor bank
- the counterweight is equipped with one or more pairs of safety gears with associated facilities for actuation and possibly also for restoring the safety gears. This is especially true for elevator systems with large transport heights or elevator systems where below the elevator more rooms, such as basement or garage rooms, are often required. Even with these counterweights electronic limiters, as shown in the cabin, possible. In a modified configuration variant, however, the counterweight does not have its own speed limiter, but the counterweight is controlled by a cabin-side safety system via signal lines, which are integrated, for example, in a compensating cable. In a further configuration variant, the counterweight has its own electronic limiter.
- the electronic limiter in this case includes, for example, rollers which are arranged on the counterweight and there roll along the guide rails of the counterweight or the electronic limiter is installed in a support roller of the counterweight or driven by it.
- rollers which are arranged on the counterweight and there roll along the guide rails of the counterweight or the electronic limiter is installed in a support roller of the counterweight or driven by it.
- at least two rollers are equipped with speed sensors. On the basis of the two speed pickups the speed of the counterweight is determined and if a too high speed is detected, the device for actuating the safety gear is actuated, so that the counterweight is safely stopped.
- the counterweight can be supplied with energy via the compensating cable and status signals can be transmitted via a communication bus.
- the communication bus can be made via a powerline connection or via its own data line.
- a power supply of the counterweight can also be effected by means of rechargeable batteries, which are supplied, for example, by a generator, which can be integrated in the reels, or which are each filled in a recharge cycle. Recharging can take place, for example, in stops where energy can be transmitted via a contact bridge, such as a sliding contact or via an induction coil, etc.
- a possible reset command can be transmitted wirelessly, for example.
- a status signal of the safety gear, or the device for actuating the safety gear can be transmitted wirelessly.
- the safety gear or the device for actuating the safety gear, is additionally actuated by a detection device for detecting an unintentional driving away of the elevator car from a standstill.
- a detection device for detecting an unintentional driving away of the elevator car from a standstill.
- the detection device includes a sensor which detects a rotation of the Mitlaufrads when it is pressed against the track at a standstill by a predetermined angle of rotation and the excess when exceeding the predetermined rotation angle, the control circuit to the electromagnets of the device Operation of the safety gear interrupts.
- the safety gear is actuated and further slippage of the elevator car is prevented.
- a brake or safety gear can be used, as in the filed on the same priority date European patent application EP10195791.8 is used.
- This brake or safety gear is in one embodiment, a double-acting braking device, which includes, for example, an Exzenterfangvorraum. This is advantageous if only a slack rope actuated safety gear is used in the counterweight.
- the double-acting braking device of the elevator car can secure all uncontrolled movements of the elevator car and the slack rope actuated safety gear of the counterweight is only to hedge the fall of the counterweight, for example as a result of breakage of the carrying and propellant. This error can be detected by slack rope monitoring.
- a braking device like the one from the registration EP10156865 is known, can be grown and used in an ideal manner to the elevator car.
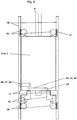
- Fig. 1 along with Fig. 2 show a schematic elevator system 1 in an overall view.
- the elevator installation 1 is installed in a building or in an elevator shaft 6 of the building and serves for the transport of persons or goods within the building.
- the elevator installation 1 includes an elevator cage 2, which can move up and down along guide rails 10.
- the elevator car 2 is accessible from the building via doors.
- a drive 5 is used to drive and hold the elevator car 2.
- the drive 5 is arranged in the upper region of the elevator shaft 6 and the car 2 is connected to the drive 5 with support means 4, for example carrying ropes or carrying straps.
- the support means 4 are guided via the drive 5 on to a counterweight 3.
- the counterweight compensates for a mass fraction of the elevator car 2, so that the drive 5 has to compensate for the main thing only an imbalance between the car 2 and counterweight 3.
- the drive 5 is arranged in the example in the upper region of the elevator shaft 6. It could, of course, also be arranged at another location in the building, or in the area of the car 2 or the counterweight 3.
- the drive 5 usually includes a tachometer 51, which measures a real speed of the prime mover and transmits it to an elevator and drive control 50.
- the elevator and drive control 50 regulates and monitors the elevator operation, it controls the drive 5 and actuates any braking devices 52 of the drive unit 5.
- the elevator and drive control 50 is usually connected via a communication bus with other control devices of the elevator system.
- the elevator and drive control 50 is usually connected to a hanging cable 48 to the car 2. About this hanging cable 48, the cabin is powered and the hanging cable 48 also includes the required communication lines.
- the elevator and drive control 50 can be designed to be single-spaced. However, various functional groups of the elevator and drive control 50 can also in their own cases at different locations in the elevator system be arranged.
- the elevator car 2 is equipped with a safety gear 11, or in the example with a pair of safety gears 11a, 11b, which is suitable for securing and / or decelerating the elevator car 2 during an unexpected movement, at overspeed or in a stop.
- the safety gear 11, 11a, 11b is arranged below the car 2 in the example.
- the safety gear 11, or each of the safety gear 11a, 11b is connected to a respective device for actuating the safety gear 14, 14a, 14b.
- the means for operating the safety gear 14, 14a, 14b is connected to a brake control 46, which comprises the means for actuating the safety gear 14, 14a, 14b for the purpose of actuating the safety gear 11, 11a, 11b and possibly also for returning the device 14, 14a, 14b can control.
- the brake control 46 includes or is connected to an electronic limiter or a corresponding speed sensor 57.
- a mechanical speed limiter, as it is commonly used, can therefore be omitted.
- the electronic limiter, or the corresponding speed sensor 57 is executed as already described in the general part and will not be explained here. Of course, the electronic limiter or the corresponding speed sensor 57 can be arranged directly on the car 2 or signals from the elevator control 50 can also be used.
- the device for actuating the safety gear 14, 14a, 14b and the brake control 46 is connected in the illustrated example to an energy store 44 with associated charger 45 and voltage converter 59. Details of this embodiment are related to Fig. 4 described.
- the counterweight 3 equipped with safety gears 11g. These in turn are suitable for securing and / or delaying the counterweight 3 in the event of unexpected movement or overspeeding.
- the safety gear 11 g is also arranged below the counterweight 3 in the example.
- the counterweight is connected by means of a compensating cable 49 to the car 3. Compensation cable 49 are used, especially in larger buildings, to compensate for a weight of the support means 4, which shifts during the process of car 2 and counterweight 3 against each other.
- this compensating cable 49 electrical lines, which on the one hand supplies the counterweight 3, or arranged there brake control 46g, an energy storage 44g and an associated charger 45g with voltage converter 59g with energy and required electrical signals.
- the arrangement and function of the safety gear 11g, the means for operating the safety gear 14g and associated parts substantially corresponds to the embodiment shown in the car 2.
- the safety gear 11g on the counterweight 3 usually at least a pair of safety gears 11g with associated means for actuating the respective safety gear.
- the counterweight 3 has its own electronic limiter, or a corresponding speed sensor 57g.
- This sensor essentially consists in that a rotational speed of rollers, for example, is made of guide rollers. With this arrangement, no further security-relevant data is required.
- the compensating cable 49 accordingly does not have to transmit any security-relevant data.
- Fig. 3 is a drive body, or an elevator car 2 or, analogously, a counterweight 3 with an attached safety gear 11 and associated device for actuation and in the example also shown for resetting the safety gear 14.
- the elevator car 2 or counterweight 3 is suspended on a suspension element 4 and is guided by means of guide shoes 58 along guide rails 10.
- the triggering of the safety gear is initialized by an electronic speed limiter eGB 57 via a brake control 46.
- a speed sensor 57 is integrated in at least two rollers. The rollers rotate along a travel speed of the driving body according to the guide rails 10.
- An evaluation unit (not shown) compares the signals of the two speed sensors 57 with each other and determines the actual driving speed.
- An alarm is triggered and the system is shut down. If one or both signals of the two speed sensors 57 show too high a travel speed, the control circuit of the two devices for actuating the safety gear 14 is interrupted and the safety gears 11 are actuated.
- Other versions of the electronic speed limiter eGB 57 are possible as described in the general part.
- the speed limiter eGB 57 may be located on the cab or counterweight or in the engine room, or it may be arranged in redundant form at multiple locations.
- An energy module 43 advantageously provides the energy at the same time for the brake control, possibly the speed measurement and the possible operation of the restoring device. It is usually powered by a hanging cable, or a compensating cable with energy.
- Fig. 4 shows an exemplary arrangement and electrical circuit of the capture device in an elevator system.
- the elevator and drive control 50 includes a safety circuit 42.
- This safety circuit 42 is interrupted when the elevator installation is in a safety-relevant state which is not compatible with normal driving. Such a condition exists, for example, when an access door to the car is not properly closed, or when an emergency switch is actuated, etc.
- the elevator and drive control 50 In the event of an interruption of the safety circuit 42, generally the drive of the elevator installation is stopped and a drive brake 52 is actuated.
- the elevator and drive control 50 also has information about the driving speed of the drive, which is generally transmitted from a drive speed sensor 51 to the elevator and drive control 50.
- the elevator and drive control 50 is preferably further connected by means of a communication bus 47 to the rest of the elevator system and of course the elevator system has an electrical power network 53.
- various other electrical components which are connected via the hanging cable 48, for example via the communication bus 47 but also the safety circuit 42 to the elevator and drive control 50.
- These components among other operational parts, such as door control, lighting, etc., the brake control 46, usually an electronic speed limiter 57, a power module 43 and the means for operating the safety gear 14th
- the device for actuating the safety gear 14 is attached to the respective safety gear 14 and can actuate them in case of need and reset, if necessary, depending on the embodiment.
- the device for actuating the safety gear 14 is actuated by the brake control 46, for example via a control circuit electromagnet 54 to actuate the safety gear 11 and to reset them, for example via a control circuit restoring device 55, again.
- the device for actuating the safety gear 14 is preferably incorporated in the safety circuit 42. This causes that when triggered device for actuating the safety gear 14 inevitably the safety circuit 42 is opened and the drive of the elevator system is stopped.
- the energy module 43 supplies the safety device 62 with the associated brake control 46 and preferably also with the device for actuating the safety gear 14 with energy.
- the optional return device of the safety gear 14 is supplied with a voltage of 12V DC and the brake controller 46 is supplied with a voltage of 24V DC.
- the energy module 43 has an energy store 44, which in the example is connected to the power grid 53 via a charger 45 and charged by it.
- a voltage converter 59 is provided in the example.
- commercially available products for example from the automotive industry, can be used, for example as a resetting device, since 12V components are available there very cheaply.
- the counterweight 3 is in the example after Fig. 4 also equipped with safety gears 11g.
- the safety gears 11g are in turn provided with means for operating the safety gears 14g and the counterweight has its own safety device 62g with associated brake control 46g and energy module 43g which are essentially the same as explained in the example of the cabin 2.
- a compensating cable 49 is the power grid 53 and the communication bus 47 led to the counterweight 3.
- the safety circuit 42 is not performed in this embodiment to the counterweight 3, but the safety messages of the safety gear 11g and the means for actuating the safety gear 14g are processed in the brake control 46g and transmitted via the communication channel 47 to the elevator control 50.
- the counterweight 3 has first and second speed sensors 57g which measure a traveling speed of the counterweight. At the counterweight, the speed sensors are preferably installed in rollers. The two speed sensors 57g can be monitored for compliance and from this a safe speed signal can be generated. Due to this safe speed signal, the brake control can operate the safety gears 11g when a too high counterweight is detected.
- Alternative designs and combinations are possible.
- a follower pulley generator can charge the energy storage of the counterweight 44g, and instead of the wired communication bus, a wireless communication bus can be used. Thus, could be dispensed with the compensating cable 49.
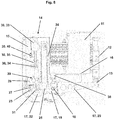
- Fig. 5 now shows the safety gear 11 with attached device for actuation and with a provision of the safety gear 14.
- the safety gear 11 is in the example to a single-acting Gleitfangvorraum.
- Catches 12 are pressed in case of need by the means for actuating and resetting the safety gear 14 via an actuator 17 by means of lever arms 20a, 20b upwards into a catching position, or until they rest against the guide rail 10. Then, the movement of the mass to be braked, or the car 2 or the counterweight 3 and the friction between the arresting wedge 12 and rail 10 ensures the construction of a normal and braking force.
- the mass to be braked To reset the safety gear, the mass to be braked must first move upward, so that the slips 12 are released from its clamping position.
- the slipper 12 can be returned to a standby position by the lever arms 20a, 20b via connecting plates 13.
- the device for actuating and resetting the safety gear 14 is screwed by means of a connection plate 16 with the safety gear 11.
- the safety gear is operated from below, Alternatively, the operation can also be done from above by the means for actuating and resetting the safety gear pulls up the slips for actuation from above and then pushes back for retraction the slips.
- the safety gear is further used in such a way that it brakes a downward movement of the driving body, or of the car or of the counterweight.
- the device could also be used in reverse, along with the safety gear, in that the device for operating and resetting the safety gear retains slips in an upper operating position and, as required, moves them downwardly to decelerate an unintended ride upwards.
- a safety gear 11 is shown with catch wedges.
- the presented device for actuating and resetting the safety gear can, of course, also work together with a roller catching device, wherein instead of catching wedges, catching rollers are actuated.
- a use of Exzenterfangvorraumen is possible, in which case the eccentric means of an actuating rod is rotated by the means for actuating and resetting the safety gear.
- Fig. 6 to 9 is a structure and operation of a device for operating and with provision of the safety gear, in connection with in Fig. 5 illustrated safety gear explained.
- Fig. 6 shows the electrically actuated safety gear 11 together with the means for actuating and resetting the safety gear 14 in the ready position or in a normal position, as it corresponds to the normal operation of the elevator system.
- the device for actuating and resetting the safety gear 14 is mounted by means of a connecting plate 16 to the safety gear 11, preferably screwed.
- the catch wedges 12 are in the normal position shown at the bottom and have horizontally several millimeters distance from the guide rail, so that they can not touch the same in the process of driving body (not shown).
- the catch wedges 12 are from the actuator 17, or from the integrated lever 17 in the actuator 20, or integrated in the actuator 17 lever arms 20a, 20b (see Fig. 5 ) by means of, or the connection tabs 13, held.
- the actuator 17 is pivotally mounted in the housing 15 on a pivot axis 18 and it further comprises a control arm 22 which cooperates via a retaining lug 23 and retaining pawl 27 with an electromagnet 28.
- lever arm 20 is preferably installed via a vertical joint 21 in the actuator 17.
- This joint allows lateral compensation when the catch wedge 12 shifts laterally when pushed along a wedge slope.
- the lever arm 20 itself can also be designed to be elastic, or the connecting lug 13 can be designed so that a lateral displacement is made possible.
- the lever arms 20a, 20b are then preferably assembled to the actuator 17 via a central pivot body 19.
- the actuator 17 is made of various individual parts, such as pivoting body 19, Lever arms 20, 20a, 20b and control arm 22 constructed.
- the actuator can also be constructed in one piece, for example as a molded part.
- a lever distance between the connecting plate 13 and the pivot axis 18 in comparison to the control distance between the pressure axis 25 and pivot axis 18 is selected to be large. This leverage is about 5: 1.
- engagement paths on the accumulator and control arm are small. This is advantageous because it allows a quick operation of the safety gear can be achieved.
- a required stroke of the slips 12 is about 100mm until a clamping of the slips on the guide rail takes place. Because of the 5: 1 ratio, the stroke on the pressure axis is only about 20mm.
- the mass of the two catch wedges With a pressure storage force of about 1000N to 1400N, the mass of the two catch wedges, which in the example is about 2 x 1.5 kg, can be moved to the catching position within less than 0.1 seconds.
- This fast response time can be optimized.
- the design of the pressure accumulator is chosen so that, for example, even if a compression spring - which is equivalent to a power loss of a spring coil - there is still enough residual power to operate the safety gear.
- the electromagnet 28 is operated according to the quiescent current principle. That is, a holding force is present as long as current flows. In this state, therefore, the solenoid 28 holds the retaining latch 27, which in turn holds on the retaining lug 23 the control arm 22 and thus the pressure accumulator 24.
- the actuator 17 is fixed and the catch wedges 12 are held on the lever 20 and the terminal plate 13.
- accidental operation of the catch wedges for example, by accidental strip the guide rail, prevented.
- the position of the actuator 17 is monitored by a first position sensor 38.
- the means for operating and resetting the safety gear 14, as further in FIG Fig. 6 can be seen, provided with a mounting lock 41.
- the mounting lock 41 can, for easy installation in the housing, as in the Fig. 6 shown by dash-dotted outline, are used and then holds the actuator, preferably mechanically in the ready position. As a result, the device can be easily retracted and mounted in the terminal lugs. This is helpful because during assembly of the safety gear, or the device for actuating and resetting the safety gear usually electrical parts are not wired.
- this mounting lock is coupled to the position sensor 38 in order to prevent commissioning of the elevator installation with a mounting lock inserted.
- the mounting lock 41 can be removed and deposited, for example, in the housing with a retaining clip, and the means for actuating and resetting the safety gear 14 is then like previously explained by the electromagnet 28 held in the standby position.
- the retaining pawl 27 gives, as in Fig. 7 can be seen, the retaining lug 25 of the control arm 22, and the actuator 17 free and the operating force of the accumulator 24 now pushes the catch wedges 12 upwards in the catching position.
- the driving body, or the elevator car or the counterweight is necessarily braked. Simultaneously with the operation of the slips 12 of the first position sensor 38 is actuated, whereby the safety circuit 42 of the elevator system (see Fig. 4 ) is interrupted.
- This second position sensor 39 may be used to early detect an accidental opening of the retaining pawl 27, or to control a provision of the device for actuating and resetting the safety gear 14 as explained below.
- the device for actuating and resetting the safety gear 14 comprises a return lever 31, on which the electromagnet 28 is arranged together with the retaining pawl 27 and the second position sensor 39.
- the return lever 31 is pivotally mounted on the pivot axis 18, so that a pivot radius of the retaining lug 23 of the control arm 22 and the retaining pawl 27 follow the same pivot path.
- the return lever 31 is connected to a return device 30.
- the restoring device 30 comprises in the example a spindle slide 35 which is connected to the return lever 31.
- the spindle slide 35 is by means of a Spindle axis 34 of a spindle drive 33 moves back and forth.
- the restoring device 30 comprises a third position sensor 40, again preferably a microswitch, which detects a retracted position of the spindle carriage 35 and thus of the return lever 31.
- the spindle slide 35 is connected in one embodiment via a force limiter 36, such as a screen spring 37 to the return lever.
- a force limiter 36 such as a screen spring 37 to the return lever.
- the force limiter 36 limits the pressure force in the return device, or in the spindle axis 34 to about 100N. If the maximum value is exceeded, then the clamping lever can move in the freewheel. To retighten the cocking lever, the tension member is moved upwards.
- a shape of the retaining pawl 27 is selected such that the retaining pawl is in turn opened when, for example, the still wedged catch wedges 12 prevent retraction of the same.
- Fig. 10 shows an advantageous connection of the electromagnets 28 in a typical use of two means for actuation and recovery of a pair of safety gears.
- the two electromagnets 28 are in this case connected in series and are acted upon via the brake control 46 with a required holding current. With this serial connection, the two devices for actuating and resetting the safety gear are exactly synchronized to milliseconds electrically.
- the two to be operated safety gear thus trigger simultaneously.
- a mechanical synchronization with a lever linkage is no longer necessary.
- Fig. 11 is one to the Fig. 1 or 3 complementary or alternative embodiment of the safety concept of a lift installation 1 which is not part of the invention shown.
- the elevator car 2 with safety gears 11, 11a, 11b and associated means for actuating the safety gear 14, 14a, 14b equipped with brake control 46, as previously in connection with the Fig. 1 to 3 is described.
- This also includes optional a corresponding speed sensor 57 and / or a safety sensor 62.
- the elevator car 2 further includes an optional detection means 60 for detecting an unwanted driving away of the elevator car from a standstill. In this case, a follower wheel is pressed in case of need to a track of the elevator car. In normal operation, the idler wheel is distanced from the track, it is not driven.
- the detection device 60 includes a sensor, which rotates the Mitlaufrads when it is pressed against the raceway at a standstill, by a predetermined angle of rotation and interrupts the device for operating the safety gear 14, 14a, 14b when exceeding the predetermined rotation angle. As a result, the safety gear 11, 11a, 11b is actuated and further slippage of the elevator car is prevented.
- a detection device 60 in the form of a monitoring device is in the European application EP10195788.4 of the same applicant filed on the same day.
- the counterweight 3 is in contrast equipped with a substantially known safety gear 11g, which is actuated by a slack rope release 56.
- the safety gear 11g is operated when a suspension force decreases below a preset value for a predetermined period of time. Breaking thus, for example, the support means 4 in the elevator system, the safety gear of the elevator car 2 would be actuated via the brake control 46 and the elevator car would be braked safely, and because of the now suddenly missing load capacity in the suspension means the slack rope release 56 would operate the safety gear 11g of the counterweight and the counterweight Save 3 from a crash.
- a deceleration device 63 for example by means of a damping device, in the slack rope release 56, it is achieved that, in the case of a short-term oscillation process, no triggering of the safety gear 11g takes place.
- the elevator expert can arbitrarily change the set shapes and arrangements.
- the brake control 46 and / or the power module 43 and / or the speed sensors 57 can be designed as separate assemblies, or these assemblies can be combined in a security package.
- This security package can also be part of an elevator control.
- the device for actuation and possibly for restoring the safety gear can be mounted as a module to a safety gear, or it can also be used with a safety gear, in Essentially be assembled in one piece.
- a safety gear with means for operating the safety gear according to the disclosure of the European application EP10195791.8 or another electrically actuated brake can be used.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
- Types And Forms Of Lifts (AREA)
- Motorcycle And Bicycle Frame (AREA)
Description
- Die Erfindung betrifft eine Aufzugsanlage mit Kabine und Gegengewicht und mit Fangvorrichtungen, welche an die Kabine und das Gegengewicht angebaut sind.
- Aufzugsanlagen sind in einem Gebäude eingebaut. Sie bestehen im Wesentlichen aus einer Aufzugskabine, welche über Tragseile oder Tragriemen mit einem Gegengewicht verbunden sind. Mittels eines Antriebes, der wahlweise auf die Tragmittel, direkt auf die Kabine oder das Gegengewicht einwirkt, werden die Kabine sowie das Gegengewicht entlang von, im Wesentlichen vertikalen, Führungsschienen verfahren. Die Aufzugsanlage wird verwendet um Personen und Güter innerhalb des Gebäudes über einzelne oder mehrere Etagen hinweg zu befördern.
Die Aufzugsanlage beinhaltet Vorrichtungen um die Aufzugskabine im Falle des Versagens des Antriebes oder der Tragmittel zu sichern oder auch bei einem Halt in einer Etage vor ungewolltem Wegdriften oder Abstürzen zu bewahren. Dazu werden in der Regel Fangvorrichtungen verwendet, welche im Bedarfsfalle die Aufzugskabine auf den Führungsschienen abbremsen können.
Bis heute wurden derartige Fangvorrichtungen durch mechanische Geschwindigkeitsbegrenzer aktiviert. Zunehmend werden heute aber auch elektronische Überwachungseinrichtungen verwendet, welche im Bedarfsfalle Brems- oder Fangvorrichtungen aktivieren können.
Um trotzdem auf bekannte und bewährte Fangeinrichtungen zurückgreifen zu können sind elektromechanische Betätigungseinheiten erforderlich, welche bei entsprechender Ansteuerung Fangvorrichtungen betätigen können. - Aus
EP0543154 ist eine derartige Vorrichtung bekannt. Hierbei wird eine Hilfszangenbremse bedarfsweise mit einer Führungsschiene in Eingriff gebracht und diese Hilfszangenbremse betätigt ein bestehendes Hebelsystem wodurch Fangvorrichtungen betätigt werden. Diese Hilfszangenbremse wird ausgelegt um das Hebelsystem und Massenteile der Fangvorrichtung bewegen zu können. Die erforderlichen elektromagnetischen Einheiten müssen entsprechend gross dimensioniert werden. - Aus
US7575099 ist eine weitere derartige Einrichtung bekannt. Bei dieser Lösung werden im Bedarfsfalle Fangkeile einer Fangvorrichtung durch Federn direkt betätigt. Die Federn sind durch einen Elektromagneten vorgespannt und die vorgespannten Federn werden im Bedarfsfalle freigegeben. Die Federn lassen sich allenfalls durch einen Spindelantrieb wiederum zurückstellen, bzw. spannen. Auch dieser Elektromagnet ist entsprechend gross zu dimensionieren, da die gesamte Vorspannkraft mehrerer Federn direkt aufgenommen und gehalten werden muss. - Vielfach werden in Aufzugsanlagen auch Brems- oder Fangeinrichtungen am Gegengewicht verlangt. Dies ist im Besonderen der Fall, wenn unterhalb des Aufzugsschachtes begehbare Räume vorhanden sind oder wenn beispielsweise zur Verhinderung einer unkontrollierten Aufwärtsfahrt Bremseinrichtungen am Gegengewicht benötigt werden.
- Aus der
US2008/017456 ist eine Aufzugsanlage mit an der Aufzugskabine und am Gegengewicht angeordneten Fangvorrichtungspaaren bekannt. Die Fangvorrichtungen können mittels elektrischen Signalen, welche einen Elektromagneten der Fangvorrichtung beaufschlagen, aktiviert oder deaktiviert werden. Hierbei verbleibt offen, wie diese Fangvorrichtungen angesteuert werden. - Die Erfindung bezweckt somit die Bereitstellung mindestens einer alternativen Lösung zur Betätigung und allenfalls auch zur Rückstellung einer Fangvorrichtung in einer Aufzugsanlage mittels elektrischer Ansteuerung und deren Integration in die Aufzugsanlage. Im Besonderen sollen Lösungen zur Ausrüstung des Gegengewichts mit Brems- oder Fangeinrichtungen aufgezeigt werden, wobei hierbei auch beim Gegengewicht auf die Verwendung eines mechanischen Begrenzers verzichtet werden soll.
Diese Lösung oder Lösungen sollen vorzugsweise mit herkömmlichen Fangvorrichtungen kombiniert werden können.
Weitere Aspekte wie eine schnelle Betätigung der Fangvorrichtung, geringer Energiebedarf, einfache Montage, Verhalten der Einrichtung bei Energieausfall oder Bauteilfehlern sollen nach Möglichkeit mitberücksichtigt werden. - Die in den unabhängigen Patentansprüchen definierten Lösungen erfüllen zumindest einzelne dieser Anforderungen und sie berücksichtigen mit ihren Ausgestaltungen gemäss den abhängigen Ansprüchen weitere nutzbringende Aspekte.
- Eine Aufzugsanlage dient dem Transport von Gütern und Personen in Gebäuden. Die Aufzugsanlage beinhaltet dazu zumindest eine Aufzugskabine zur Aufnahme der Personen und Güter, und in der Regel ein Gegengewicht. Gegengewicht und Aufzugskabine sind über Tragmittel wie beispielsweise ein Tragseil, einen Tragriemen oder andere Arten von Tragmittel miteinander verbunden. Diese Tragmittel sind über eine Umlenkrolle, bzw. eine Antriebsscheibe geführt und das Gegengewicht und die Aufzugskabine bewegen sich somit gegengleich im Gebäude, bzw. in einem im Gebäude vorgesehenem Aufzugsschacht. Um einen Absturz der Kabine und im Besonderen auch des Gegengewichts zu verhindern, oder auch um anderes Fehlverhalten dieser Fahrkörper - unter Fahrkörper ist im Folgenden sowohl die Aufzugskabine wie auch das Gegengewicht verstanden - zu verhindern, ist zumindest die Aufzugskabine und auch das Gegengewicht mit einer Fangvorrichtung ausgerüstet. Die Fahrkörper beinhalten dabei in der Regel jeweils zwei Fangvorrichtungen, welche je einer Führungsschiene zugeordnet sind. Die Führungsschienen - in der Regel zwei Führungsschienen - führen den Fahrkörper dem Aufzugsschacht entlang und sie beinhalten einen Steg auf den die Fangvorrichtung zum Zwecke des Bremsens eingreifen kann. Eine Ausführungsart einer herkömmlichen Fangvorrichtung beinhaltet zwei Fangkeile. Die Fangkeile sind in der Fangvorrichtung vertikal verschiebbar gelagert und geführt. Im Normalbetrieb der Aufzugsanlage befinden sich die Fangkeile in einer unteren Bereitschaftsposition. Im Bedarfsfalle werden die Fangkeile durch eine Einrichtung zur Betätigung der Fangvorrichtung, entlang einer geneigten Führungsbahn nach oben geschoben, bis sie den Steg der Führungsschiene klemmen. Die durch die Klemmung entstehende Reibkraft bewegt nun - bei sich weiterbewegender Fangvorrichtung, bzw. Fahrkörper - die Fangkeile weiter in ein Gehäuse der Fangvorrichtung bis zu einem Keilanschlag. Durch diese Weiterbewegung wird, durch die Keilwirkung der Fangkeile, das Gehäuse, welches entsprechend federnd ausgeführt ist, aufgedrückt. Dieses Aufdrücken bestimmt schlussendlich eine Andrückkraft der Fangkeile an den Steg der Führungsschiene und damit eine Bremskraft welche den Fahrkörper bremst.
- In einer Ausführung beinhaltet die Einrichtung zur Betätigung und gegebenenfalls auch zur Rückstellung der Fangvorrichtung einen einzelnen Druckspeicher, welcher im Bedarfsfalle die zwei Fangkeile der vorgängig erläuterten Fangvorrichtung, im Wesentlichen synchron, von der Bereitschaftsposition bis an den Steg der Führungsschiene, in eine Fangposition bewegt. Weiter beinhaltet die Einrichtung vorzugsweise eine fernbetätigbare Rückstelleinrichtung die den Druckspeicher wieder in eine Bereitschaftsposition spannen kann. Dies erfolgt wenn der Fahrkörper nach erfolgter Bremsung und Prüfung des Sicherheitszustands der Aufzugsanlage wieder freigegeben werden soll.
Der gemeinsame Druckspeicher ermöglicht eine sichere Betätigung der Fangvorrichtung, da beide Keile gleichzeitig und verklemmungsfrei betätigt werden können. Der gemeinsame Druckspeicher kann auch einfach, beispielsweise über ein Hebelsystem an Fangvorrichtungen gekoppelt werden.
Selbstverständlich lassen sich auch andersartige Fangvorrichtungen, wie beispielsweise eine Rollensperr-Fangvorrichtung entsprechend betätigen, wobei bei derartigen Fangvorrichtungen anstelle von Fangkeilen, Fangrollen oder entsprechende andere Fangorgane betätigt werden.
Eine Ausführung einer derartigen Einrichtung zur Betätigung und auch zur Rückstellung der Fangvorrichtung ist in einer Anmeldung des gleichen Anmelders offenbart, die mit dem AktenzeichenEP10195781.9
Eine andere Lösung zur Ansteuerung, bzw. zur Betätigung einer Fangvorrichtung ist einer anderen Anmeldung des gleichen Anmelders offenbart, die mit dem AktenzeichenEP10195791.8
Vorzugsweise ist die Einrichtung für die Betätigung und gegebenenfalls auch für die Rückstellung einer Fangvorrichtung in ein Gehäuse eingebaut, bzw. das Gehäuse ist ein Bestandteil der Einrichtung. Dieses Gehäuse ist derart geformt und mit Anschlussplatten versehen, dass die Einrichtung an eine Fangvorrichtung angebaut werden kann oder dass sie zusammen mit der Fangvorrichtung an die Kabine, bzw. das Gegengewicht angebaut werden kann. Wie Eingangs schon erwähnt werden heutige Fangvorrichtungen in der Regel mittels einer Hebelmechanik betätigt, welche von einem Begrenzerseil betätigt wird. Diese Fangvorrichtungen beinhalten in der Regel eine untere Anschlussstelle, welche ein Befestigen von Führungsschuhen ermöglicht. Das vorliegend geformte Gehäuse ist nun vorteilhafterweise so ausgestaltet, dass es an diese Anschlussstelle angebaut werden kann. Die Anschlussplatte wird beispielsweise zwischen Führungsschuh und Fangvorrichtung mitverschraubt oder sie wird zwischen Fahrkörper und Fangvorrichtung mitverschraubt. Damit kann die Einrichtung zur Betätigung und gegebenenfalls auch zur Rückstellung der Fangvorrichtung an eine bestehende Aufzugsanlage, bzw. eine bestehende Fangvorrichtung angebaut werden. Es ist somit hervorragend für die Modernisierung von Aufzugsanlagen geeignet. - Die Einrichtung zur Betätigung der Fangvorrichtung kann zusammen mit einer entsprechenden Fangvorrichtung in verschiedenen Konfigurationen in Aufzugsanlagen eingesetzt werden.
- In einer Konfigurationsvariante sind ein Paar Fangvorrichtungen mit zugehörigen Einrichtungen zur Betätigung der Fangvorrichtungen auf der Kabine angeordnet. Die Einrichtungen zur Betätigung der Fangvorrichtungen werden durch einen elektronischen Begrenzer angesteuert und eine allfällige Rückstelleinrichtung wird durch ein Bremssteuergerät gesteuert. Der elektronische Begrenzer steuert beispielsweise direkt oder über das entsprechende Bremssteuergerät die Elektromagneten der Einrichtungen zur Betätigung und fallweise auch zur Rückstellung der Fangvorrichtungen an. Die Elektromagneten sind vorzugsweise in Serie geschalten.
- Der elektronische Begrenzer kann beispielsweise eine Geschwindigkeits-Überwachungseinrichtung sein, wie sie in der
WO03004397 EP1602610 vorgestellt ist. Der elektronische Begrenzer, bzw. die dazu gehörende Einrichtung ist vorteilhafterweise mit elektrischen Energiespeichern, wie Batterien, Akkus, Kondensatorbatterie ausgerüstet. Mit Hilfe dieser Energiespeicher wird bei einem Energieausfall im Gebäude die Sicherheitseinrichtung über eine vordefinierte Zeit aktiv gehalten.
Selbstverständlich können anstelle eines Paares von Fangvorrichtungen auch mehrere Paare von Fangvorrichtungen mit jeweils zugehörigen Einrichtungen zur Betätigung der Fangvorrichtung an die Kabine angebaut werden. - In einer Konfigurationsvariante ist das Gegengewicht mit einem, oder mehreren Paaren Fangvorrichtungen mit zugehörigen Einrichtungen zur Betätigung und allenfalls auch zur Rückstellung der Fangvorrichtungen ausgerüstet. Dies ist vor allem bei Aufzugsanlagen mit grossen Transporthöhen oder bei Aufzugsanlagen bei denen sich unterhalb des Aufzuges weitere Räume, wie beispielsweise Keller- oder Garagenräume, befinden vielfach erforderlich. Auch bei diesen Gegengewichten sind elektronische Begrenzer, wie sie bei der Kabine dargestellt sind, möglich.
In einer abgewandelten Konfigurationsvariante verfügt jedoch das Gegengewicht über keinen eigenen Geschwindigkeitsbegrenzer, sondern das Gegengewicht wird von einem kabinenseitigen Sicherheitssystem über Signalleitungen, welche beispielsweise in einem Ausgleichskabel integriert sind angesteuert.
In einer weiteren Konfigurationsvariante verfügt das Gegengewicht über einen eigenen elektronischen Begrenzer. Der elektronischen Begrenzer beinhaltet hierbei beispielsweise Rollen, welche auf dem Gegengewicht angeordnet sind und dort entlang der Führungsschienen des Gegengewichts rollen oder der elektronische Begrenzer ist in eine Tragrolle des Gegengewichts eingebaut oder von ihr angetrieben. Vorzugsweise sind mindestens zwei Rollen mit Drehzahlaufnehmern ausgerüstet. Anhand der zwei Drehzahlaufnehmer wird die Geschwindigkeit des Gegengewichts ermittelt und bei Feststellung einer zu hohen Geschwindigkeit wird die Einrichtung zur Betätigung der Fangvorrichtung betätigt, so dass das Gegengewicht sicher stillgesetzt wird.
Das Gegengewicht kann hierbei über das Ausgleichskabel mit Energie versorgt werden und über einen Kommunikationsbus können Statussignale übermittelt werden. Der Kommunikationsbus kann über eine Powerlineverbindung oder über eine eigene Datenleitung erfolgen.
Eine Energieversorgung des Gegengewichts kann natürlich auch über Akkus erfolgen, welche beispielsweise von einem Generator, welcher in den Rollen integriert sein kann, gespeist ist oder welche jeweils in einem Nachtladezyklus gefüllt werden. Ein Nachladen kann beispielsweise in Haltestellen erfolgen wo Energie über eine Kontaktbrücke, wie einen Schleifkontakt oder über eine Induktionsspulen, etc. übertragen werden kann. Ein allfälliger Rückstellbefehl kann beispielsweise drahtlos (wireless) übermittelt werden. Gleichermassen kann auch ein Statussignal der Fangvorrichtung, bzw. der Einrichtung zur Betätigung der Fangvorrichtung drahtlos übermittelt werden. - In einer anderen Konfigurationsvariante einer Aufzugsanlage ist die Fangvorrichtung, bzw. die Einrichtung zur Betätigung der Fangvorrichtung, zusätzlich von einer Detektionseinrichtung zur Feststellung eines ungewollten Wegfahrens der Aufzugskabine aus einem Stillstand angesteuert. In einer besonders einfachen Ausführung einer derartigen Detektionseinrichtung wird ein Mitlaufrad im Bedarfsfalle an eine Laufbahn der Aufzugskabine angedrückt. Im Normabetrieb ist das Mitlaufrad von der Laufbahn distanziert, es wird nicht angetrieben. Die Detektionseinrichtung beinhaltet einen Sensor, welcher ein Drehen des Mitlaufrads, wenn es im Stillstand an die Laufbahn angedrückt wird, um einen vorbestimmten Drehwinkel feststellt und der bei Überschreitung des vorbestimmten Drehwinkels den Steuerkreis zu den Elektromagneten der Einrichtung zur Betätigung der Fangvorrichtung unterbricht. Dadurch wird die Fangvorrichtung betätigt und einem weiteren Wegrutschen der Aufzugskabine ist vorgebeugt.
- Kombinationen der für das Gegengewicht und die Kabine gezeigten Konfigurationsvarianten sind natürlich möglich. Im Besonderen kann beispielsweise auf der Aufzugskabine eine Brems- oder Fangvorrichtung verwendet werden, wie sie in der am gleichen Prioritätstag eingereichten europäischen Patentanmeldung
EP10195791.8 EP10156865 - Im Folgenden wird die Erfindung anhand eines bevorzugten Ausführungsbeispieles im Zusammenhang mit den Figuren beispielhaft erläutert.
Es zeigen: -
Fig. 1 eine schematische Ansicht einer Aufzugsanlage, -
Fig. 2 eine schematische Draufsicht der Aufzugsanlage vonFig. 1 , -
Fig. 3 eine Aufzugskabine in eingebautem Zustand in der Aufzugsanlage, -
Fig. 4 eine schematische Darstellung einer möglichen elektrischen Zusammenschaltung der Fangeinrichtungen einer Aufzugsanlage, -
Fig. 5 eine einzelne Fangvorrichtung mit angebauter Einrichtung für die Betätigung und eine Rückstellung der Fangvorrichtung, -
Fig. 6 die Einrichtung mit der Fangvorrichtung in Bereitschaftsposition, -
Fig. 7 die Einrichtung mit der Fangvorrichtung in eingerückter Stellung, -
Fig. 8 die Einrichtung mit der Fangvorrichtung in Rückstellposition, -
Fig. 9 die Einrichtung mit der Fangvorrichtung in Rückstellposition mit geschlossener Halteklinke, -
Fig. 10 ein Serieschaltung eines Paar Elektromagneten der Einrichtung zur Betätigung der Fangvorrichtung -
Fig. 11 eine andere Konfigurationsvariante einer Aufzugsanlage mit Kabine und Gegengewicht mit integrierter Sicherheitseinrichtung, - In den Figuren sind für gleichwirkende Teile über alle Figuren hinweg dieselben Bezugszeichen verwendet.
Fig. 1 zusammen mitFig. 2 zeigen eine schematische Aufzugsanlage 1 in einer Gesamtschau. Die Aufzugsanlage 1 ist in einem Gebäude, bzw. in einen Aufzugsschacht 6 des Gebäudes eingebaut, und sie dient dem Transport von Personen oder Gütern innerhalb des Gebäudes. Die Aufzugsanlage 1 beinhaltet eine Aufzugskabine 2, welche sich entlang von Führungsschienen 10 auf- und abwärts bewegen kann. Die Aufzugskabine 2 ist vom Gebäude über Türen zugänglich. Ein Antrieb 5 dient zum Antreiben und Halten der Aufzugskabine 2. Der Antrieb 5 ist im oberen Bereich des Aufzugsschachts 6 angeordnet und die Kabine 2 ist mit Tragmitteln 4, beispielsweise Tragseilen oder Tragriemen, zum Antrieb 5 verbunden. Die Tragmittel 4 sind über den Antrieb 5 weiter zu einem Gegengewicht 3 geführt. Das Gegengewicht gleicht einen Massenanteil der Aufzugskabine 2 aus, so dass der Antrieb 5 zur Hauptsache lediglich ein Ungleichgewicht zwischen Kabine 2 und Gegengewicht 3 ausgleichen muss. Der Antrieb 5 ist im Beispiel im oberen Bereich des Aufzugsschachts 6 angeordnet. Er könnte selbstverständlich auch an einem anderen Ort im Gebäude, oder im Bereich der Kabine 2 oder des Gegengewichts 3 angeordnet sein. Der Antrieb 5 beinhaltet in der Regel einen Drehzahlmesser 51, der eine wirkliche Drehzahl der Antriebsmaschine misst und an eine Aufzugs- und Antriebssteuerung 50 übermittelt. Die Aufzugs- und Antriebssteuerung 50 regelt und überwacht den Aufzugsbetrieb, sie steuert den Antrieb 5 und betätigt allfällige Bremseinrichtungen 52 der Antriebseinheit 5. Die Aufzugs- und Antriebssteuerung 50 ist in der Regel über einen Kommunikationsbus mit übrigen Kontrolleinrichtungen der Aufzugsanlage verbunden. Die Aufzugs- und Antriebssteuerung 50 ist in der Regel mit einem Hängekabel 48 zur Kabine 2 verbunden. Über dieses Hängekabel 48 wird die Kabine mit Energie versorgt und das Hängekabel 48 beinhaltet auch die erforderlichen Kommunikationsleitungen.
Die Aufzugs- und Antriebssteuerung 50 kann selbstverständlich eingehäusig ausgeführt sein. Verschiedene Funktionsgruppen der Aufzugs- und Antriebssteuerung 50 können jedoch auch in eigenen Gehäusen an unterschiedlichen Orten in der Aufzugsanlage angeordnet sein.
Die Aufzugskabine 2 ist mit einer Fangvorrichtung 11, bzw. im Beispiel mit einem Paar von Fangvorrichtungen 11a, 11b ausgerüstet, welche geeignet ist um die Aufzugskabine 2 bei einer unerwarteten Bewegung, bei Übergeschwindigkeit oder in einem Halt zu sichern und/oder zu verzögern. Die Fangvorrichtung 11, 11a, 11b ist im Beispiel unterhalb der Kabine 2 angeordnet. - Die Fangvorrichtung 11, bzw. jede der Fangvorrichtungen 11a, 11b ist zu jeweils einer Einrichtung zur Betätigung der Fangvorrichtung 14, 14a, 14b verbunden. Die Einrichtungen zur Betätigung der Fangvorrichtung 14, 14a, 14b ist zu einer Bremssteuerung 46 verbunden, welche die Einrichtung zur Betätigung der Fangvorrichtung 14, 14a, 14b zum Zwecke der Betätigung der Fangvorrichtung 11, 11a, 11b und gegebenenfalls auch zur Rückstellung der Einrichtung 14, 14a, 14b ansteuern kann. Die Bremssteuerung 46 beinhaltet einen elektronischen Begrenzer, bzw. eine entsprechende Geschwindigkeitssensorik 57, bzw. ist zu einer solchen verbunden. Ein mechanischer Geschwindigkeitsbegrenzer, wie er üblicherweise verwendet ist, kann deswegen entfallen. Der elektronische Begrenzer, bzw. die entsprechende Geschwindigkeitssensorik 57 ist wie im generellen Teil bereits beschrieben ausgeführt und wird hier nicht näher erläutert. Der elektronische Begrenzer, bzw. die entsprechende Geschwindigkeitssensorik 57 kann natürlich direkt auf der Kabine 2 angeordnet sein oder es können auch Signale aus der Aufzugssteuerung 50 verwendet sein.
- Die Einrichtung zur Betätigung der Fangvorrichtung 14, 14a, 14b und die Bremssteuerung 46 ist im dargestellten Beispiel zu einem Energiespeicher 44 mit zugehörigem Ladegerät 45 und Spannungswandler 59 verbunden.
Details dieser Ausgestaltung sind im Zusammenhang mitFig. 4 beschrieben. - Im dargestellten Beispiel gemäss den
Fig. 1 und 2 ist auch das Gegengewicht 3 mit Fangvorrichtungen 11g ausgerüstet. Diese sind ihrerseits geeignet um das Gegengewicht 3 bei einer unerwarteten Bewegung oder bei Übergeschwindigkeit zu sichern und/oder zu verzögern. Die Fangvorrichtung 11g ist im Beispiel ebenfalls unterhalb des Gegengewichts 3 angeordnet. Das Gegengewicht ist mittels eines Ausgleichskabels 49 zur Kabine 3 verbunden. Ausgleichskabel 49 werden, vor allem bei grösseren Gebäuden verwendet, um ein Gewicht der Tragmittel 4, das sich während dem Verfahren von Kabine 2 und Gegengewicht 3 gegeneinander verschiebt auszugleichen. Im vorliegenden Beispiel beinhaltet dieses Ausgleichskabel 49 elektrische Leitungen, welche einerseits das Gegengewicht 3, bzw. eine dort angeordnete Bremssteuerung 46g, einen Energiespeicher 44g sowie ein zugehöriges Ladegerät 45g mit Spannungswandler 59g mit Energie und erforderlichen elektrischen Signalen versorgt.
Die Anordnung und Funktion der Fangvorrichtung 11g, der Einrichtung zur Betätigung der Fangvorrichtung 14g und zugehöriger Teile entspricht im Wesentlichen der bei der Kabine 2 dargestellten Ausführung. Selbstverständlich beinhaltet auch die Fangvorrichtung 11g am Gegengewicht 3 in der Regel mindestens ein Paar Fangvorrichtungen 11g mit zugehörigen Einrichtungen zur Betätigung der jeweiligen Fangvorrichtungen. - Im dargestellten Beispiel verfügt im Besonderen das Gegengewicht 3 über einen eigenen elektronischen Begrenzer, bzw. eine entsprechende Geschwindigkeitssensorik 57g. Diese Sensorik besteht im Wesentlichen darin, dass eine Drehgeschwindigkeit von Rollen, beispielsweise von Führungsrollen vorgenommen wird. Bei dieser Anordnung werden keine weiteren sicherheitsrelevanten Daten benötigt. Das Ausgleichskabel 49 muss dementsprechend keine sicherheitsrelevanten Daten übertragen.
- In
Fig. 3 ist einen Fahrkörper, bzw. eine Aufzugskabine 2 oder sinngemäss ein Gegengewicht 3 mit einer angebauten Fangvorrichtung 11 und zugehöriger Einrichtung zur Betätigung und im Beispiel auch zur Rückstellung der Fangvorrichtung 14 dargestellt. Die Aufzugskabine 2 oder -Gegengewicht 3 ist an einem Tragmittel 4 aufgehängt und wird mittels Führungsschuhen 58 an Führungsschienen 10 entlang geführt.
Das Auslösen der Fangvorrichtung wird von einem elektronischen Geschwindigkeitsbegrenzer eGB 57 über eine Bremssteuerung initialisiert 46.
In einer Ausführung ist jeweils ein Drehzahlsensor 57 in mindestens zwei Rollen integriert. Die Rollen drehen einer Verfahrgeschwindigkeit des Fahrkörpers entsprechend den Führungsschienen 10 entlang. Eine Auswerteeinheit (nicht dargestellt) vergleicht die Signale der beiden Drehzahlsensoren 57 miteinander und ermittelt die wirkliche Fahrgeschwindigkeit. Bei Feststellung von Unstimmigkeit zwischen den Signalen wird ein Alarm ausgelöst und die Anlage wird stillgesetzt. Zeigt ein oder beide Signale der beiden Drehzahlsensoren 57 eine zu hohe Fahrgeschwindigkeit, wird der Steuerkreis der beiden Einrichtung zur Betätigung der Fangvorrichtung 14 unterbrochen und die Fangvorrichtungen 11 werden betätigt.
Andere Ausführungen des elektronischen Geschwindigkeitsbegrenzers eGB 57 sind möglich wie es im generellen Teil beschrieben ist. Der Geschwindigkeitsbegrenzers eGB 57 kann auf der Kabine oder dem Gegengewicht oder im Maschinenraum, oder er ist in redundanter Form an mehreren Orten angeordnet.
Ein Energiemodul 43 stellt die Energie vorteilhafterweise zugleich für die Bremsteuerung, allenfalls die Geschwindigkeitsmessung und den allfälligen Betrieb der Rückstelleinrichtung zur Verfügung. Sie wird in der Regel über ein Hängekabel, bzw. ein Ausgleichskabel mit Energie versorgt. -
Fig. 4 zeigt eine beispielhafte Anordnung und elektrische Schaltung der Fangeinrichtung in einer Aufzugsanlage. Im Schacht 6, vorteilhafterweise in der Nähe des Antriebs ist die Aufzugs- und Antriebssteuerung 50 angeordnet. Die Aufzugs- und Antriebssteuerung 50 beinhaltet einen Sicherheitskreis 42. Dieser Sicherheitskreis 42 wird unterbrochen, wenn sich die Aufzugsanlage in einem sicherheitsrelevanten Zustand befindet der mit einer Normalfahrt nicht vereinbar ist. Ein solcher Zustand liegt beispielsweise vor, wenn eine Zugangstüre zur Kabine nicht ordnungsgemäss geschlossen wird, oder wenn ein Notschalter betätigt wird, u.s.w. Bei einem Unterbruch des Sicherheitskreises 42 wird in der Regel der Antrieb der Aufzugsanlage stillgesetzt und eine Antriebsbremse 52 wird betätigt. Die Aufzugs- und Antriebssteuerung 50 verfügt in der Regel auch über eine Information zur Fahrgeschwindigkeit des Antriebs, welche in der Regel von einem Antriebsdrehzahlgeber 51 zur Aufzugs- und Antriebssteuerung 50 übermittelt wird. Die Aufzugs- und Antriebssteuerung 50 ist vorzugsweise weiter mittels eines Kommunikationsbusses 47 zum übrigen Aufzugssystem verbunden und selbstverständlich verfügt die Aufzugsanlage über ein elektrisches Energienetz 53.
Auf der Kabine 2 befinden sich verschiedene weitere elektrische Komponenten, welche über das Hängekabel 48, beispielsweise über den Kommunikationsbus 47 aber auch den Sicherheitskreis 42, zur Aufzugs- und Antriebssteuerung 50 verbunden sind. Diese Komponenten sind neben weiteren betriebsbedingten Teilen, wie Türsteuerung, Beleuchtung, etc., die Bremssteuerung 46, in der Regel ein elektronischer Geschwindigkeitsbegrenzer 57, ein Energiemodul 43 und die Einrichtung zur Betätigung der Fangvorrichtung 14.
Die Einrichtung zur Betätigung der Fangvorrichtung 14 ist an die jeweilige Fangvorrichtung 14 angebaut und kann diese im Bedarfsfalle betätigen und allenfalls, je nach Ausführungsart, wieder rückstellen. Die Einrichtung zur Betätigung der Fangvorrichtung 14 wird durch die Bremssteuerung 46, beispielsweise über einen Steuerkreis-Elektromagnet 54 angesteuert um die Fangvorrichtung 11 zu betätigen und um sie, beispielsweise über einen Steuerkreis-Rückstelleinrichtung 55, auch wieder zurückzustellen. Die Einrichtung zur Betätigung der Fangvorrichtung 14 ist vorzugsweise in den Sicherheitskreis 42 eingebunden. Dies bewirkt, dass bei ausgelöster Einrichtung zur Betätigung der Fangvorrichtung 14 zwangsläufig der Sicherheitskreis 42 geöffnet und der Antrieb der Aufzugsanlage stillgesetzt wird. Das Energiemodul 43 versorgt die Sicherheitseinrichtung 62 mit der zugehörenden Bremssteuerung 46 und vorzugsweise auch die Einrichtung zur Betätigung der Fangvorrichtung 14 mit Energie. Im dargestellten Beispiel wird die optionale Rückstelleinrichtung der Fangvorrichtung 14 mit einer Spannung von 12V DC versorgt und die Bremssteuerung 46 wird mit einer Spannung von 24V DC versorgt. Das Energiemodul 43 verfügt dazu über einen Energiespeicher 44, welcher im Beispiel über ein Ladegerät 45 zum Energienetz 53 verbunden und von diesem aufgeladen ist. Zur Generierung unterschiedlicher Spannungen ist im Beispiel ein Spannungswandler 59 vorgesehen. Dadurch können, beispielsweise zur als Rückstelleinrichtung, marktübliche Produkte, beispielsweise aus dem Automobilbau verwendet werden, da dort 12V Komponenten sehr günstig verfügbar sind.
Das Gegengewicht 3 ist im Beispiel nachFig. 4 ebenfalls mit Fangvorrichtungen 11g ausgerüstet. Die Fangvorrichtungen 11g sind ihrerseits mit Einrichtungen zur Betätigung der Fangvorrichtungen 14g versehen und das Gegengewicht verfügt über eine eigene Sicherheitseinrichtung 62g mit zugehöriger Bremssteuerung 46g und Energiemodul 43g welche im Wesentlichen gleich aufgebaut sind wie am Beispiel der Kabine erklärt 2. Über ein Ausgleichskabel 49 ist das Energienetz 53 und der Kommunikationsbus 47 zum Gegengewicht 3 geführt. Der Sicherheitskreis 42 ist in dieser Ausführung nicht bis zum Gegengewicht 3 geführt, sondern die Sicherheitsmeldungen der Fangvorrichtung 11g und der Einrichtung zur Betätigung der Fangvorrichtung 14g werden in der Bremssteuerung 46g verarbeitet und über den Kommunikationskanal 47 an die Aufzugssteuerung 50 übermittelt. Weiter verfügt in dieser Ausführung das Gegengewicht 3 über einen ersten und einen zweiten Geschwindigkeitssensor 57g, welche eine Fahrgeschwindigkeit des Gegengewichts messen. Am Gegengewicht sind die Geschwindigkeitssensoren vorzugsweise in Rollen eingebaut. Die zwei Geschwindigkeitssensoren 57g können auf Übereinstimmung überwacht werden und daraus kann ein sicheres Geschwindigkeitssignal erzeugt werden. Aufgrund dieses sicheren Geschwindigkeitssignals kann die Bremssteuerung bei Feststellung einer zu hohen Geschwindigkeit des Gegengewichts die Fangvorrichtungen 11g betätigen.
Alternative Ausführungen und Kombinationen sind möglich. Anstelle des Energienetzes auf dem Gegengewicht kann ein mitlaufender Rollengenerator den Energiespeicher des Gegengewichts 44g laden und anstelle des drahtgebundenen Kommunikationsbusses kann ein Wireless- Kommunikationsbus verwendet sein. Somit könnte auf das Ausgleichskabel 49 verzichtet werden. -
Fig. 5 zeigt nun die Fangvorrichtung 11 mit angebauter Einrichtung zur Betätigung und mit einer Rückstellung der Fangvorrichtung 14. Bei der Fangvorrichtung 11 handelt es sich im Beispiel um eine einfachwirkende Gleitfangvorrichtung. Fangkeile 12 werden im Bedarfsfalle von der Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 über einen Betätiger 17 mittels Hebelarmen 20a, 20b nach oben in eine Fangposition gedrückt, bzw. bis sie an der Führungsschiene 10 anliegen. Dann sorgt die Bewegung der zu bremsenden Masse, bzw. der Kabine 2 oder des Gegengewichts 3 und die Reibung zwischen Fangkeil 12 und Schiene 10 für den Aufbau einer Normal- und Bremskraft.
Um die Fangvorrichtung zurückzustellen muss sich die zu bremsende Masse zuerst nach oben bewegen, damit die Fangkeile 12 aus ihrer Klemmposition gelöst werden. Dann, wenn die Reibungskraft zwischen Fangkeil und Schiene genügend klein ist, kann der Fangkeil 12 von den Hebelarmen 20a, 20b über Anschlusslaschen 13 nach unten in eine Bereitschaftsposition zurückgesetzt werden. Die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 ist mittels einer Anschlussplatte 16 mit der Fangvorrichtung 11 verschraubt.
Im Beispiel wird die Fangvorrichtung von unten betätigt, Alternativ kann die Betätigung auch von oben erfolgen, indem die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung die Fangkeile zur Betätigung von oben hochzieht und dann zur Zurückstellung die Fangkeile wiederum nach unten drückt. Im Beispiel ist weiter die Fangvorrichtung derart verwendet dass sie eine Abwärtsbewegung des Fahrkörpers, bzw. der Kabine oder des Gegengewichts bremst. Die Einrichtung könnte, zusammen mit der Fangvorrichtung auch umgekehrt verwendet sein, dass die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung Fangkeile in einer oberen Betriebslage hält und sie Bedarfsgemäss nach unten bewegt um einen unbeabsichtigte fahrt aufwärts abzubremsen.
Im Beispiel ist eine Fangvorrichtung 11 mit Fangkeilen gezeigt. Die vorgestellte Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung kann selbst verständlich auch mit einer Rollenfangvorrichtung zusammenarbeite, wobei anstelle von Fangkeilen Fangrollen betätigt werden. Auch eine Verwendung von Exzenterfangvorrichtungen ist möglich, wobei dann der Exzenter mittels einer Betätigungsstange durch die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung verdreht wird. - In den folgenden
Fig. 6 bis 9 ist ein Aufbau und Funktionsablauf einer Einrichtung zur Betätigung und mit Rückstellung der Fangvorrichtung, im Zusammenhang mit der inFig. 5 dargestellten Fangvorrichtung erläutert.
Fig. 6 zeigt die elektrisch betätigbare Fangvorrichtung 11 zusammen mit der Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 in Bereitschaftsstellung bzw. in einer Normalstellung, wie sie dem Normalbetrieb der Aufzugsanlage entspricht. Die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 ist mittels einer Anschlussplatte 16 an die Fangvorrichtung 11 angebaut, vorzugsweise verschraubt. Die Fangkeile 12 sind in der dargestellten Normalstellung ganz unten und haben horizontal mehrere Millimeter Abstand zur Führungsschiene, so dass sie dieselbe beim Verfahren des Fahrkörpers, (nicht dargestellt) nicht streifen können. Die Fangkeile 12 werden vom Betätiger 17, bzw. von dem im Betätiger 17 integrierten Hebelarm 20, bzw. den im Betätiger 17 integrierten Hebelarmen 20a, 20b (sieheFig. 5 ) mittels der, bzw. den Anschlusslaschen 13, festgehalten. Der Betätiger 17 ist im Gehäuse 15 schwenkbar auf einer Schwenkachse 18 gelagert und er weist weiter einen Steuerarm 22 auf, welcher über eine Haltenase 23 und Halteklinke 27 mit einem Elektromagneten 28 zusammenwirkt. Ein Druckspeicher 24, im Beispiel als Druckfeder ausgeführt, greift über eine Druckachse 25 ebenfalls am Steuerarm 22, bzw. am Betätiger 17 an und stellt eine erforderliche Betätigungskraft bereit um im Bedarfsfalle, das heisst bei Freigabe der Haltenase 23, die Fangvorrichtung zu betätigen.
Weiter ist der Hebelarm 20 vorzugsweise über ein vertikales Gelenk 21 im Betätiger 17 eingebaut. Dieses gelenk ermöglicht einen seitlichen Ausgleich, wenn sich der Fangkeil 12 beim Hochschieben entlang einer Keilschräge seitlich verschiebt. Anstelle des gelenkes 21 kann natürlich auch der Hebelarm 20 selbst entsprechend elastisch ausgeführt sein, oder die Anschlusslasche 13 kann so ausgeführt sein, dass eine seitliche Verschiebung ermöglicht ist.
In den Ansichten gemässFig. 6 bis 9 ist jeweils lediglich 1 Hebelarm 20 sichtbar. Es ist jedoch im Zusammenhang mitFig. 5 klar, dass jeweils zwei Hebelarme 20a, 20b nebeneinander angeordnet sind, welche die zugeordneten Fangkeile betätigen. Die Hebelarme 20a, 20b sind dann vorzugsweise über einen zentralen Schwenkkörper 19 zum Betätiger 17 zusammengebaut.
Im Beispiel ist der Betätiger 17 aus verschiedenen Einzelteilen, wie Schwenkkörper 19, Hebelarme 20, 20a, 20b und Steuerarm 22 aufgebaut. Selbstverständlich kann der Betätiger auch einstückig, beispielsweise als Formgussteil aufgebaut sein. - Im Beispiel ist ein Hebelabstand zwischen Anschlusslasche 13 und Schwenkachse 18 im Vergleich zum Steuerabstand zwischen Druckachse 25 und Schwenkachse 18 gross gewählt. Dieses Hebelverhältnis beträgt etwa 5:1. Dadurch werden Einrückwege am Druckspeicher und Steuerarm klein. Dies ist vorteilhaft, da dadurch eine schnelle Betätigung der Fangvorrichtung erreicht werden kann. In einem ausgeführten Beispiel beträgt ein benötigter Hub der Fangkeile 12 etwa 100mm bis eine Klemmung der Fangkeile an der Führungsschiene stattfindet. Wegen der 5:1 Übersetzung beträgt der Hub an der Druckachse lediglich etwa 20mm. Mit einer Druckspeicherkraft von etwa 1000N bis 1400N kann die Masse der zwei Fangkeile, welche im Beispiel etwa 2 x 1.5 kg beträgt, innerhalb von weniger als 0.1 Sekunden in die Fangposition bewegt werden. Durch Massnahmen am Betätiger, welche die Masse des Betätigers reduzieren, wie gelochte Hebel oder Hebelwerkstoff aus Aluminium oder anderen leichten und doch festen Materialien, kann diese schnelle Reaktionszeit optimiert werden.
Die Kraftauslegung des Druckspeichers ist dabei so gewählt, dass beispielsweise auch bei Bruch einer Druckfeder - was gleichbedeutend einem Kraftverlust einer Federwindung ist - noch genügend Restkraft zur Betätigung der Fangvorrichtung besteht. - Der Elektromagnet 28 wird nach dem Ruhestromprinzip betrieben. Das heisst, eine Haltekraft ist vorhanden solange Strom fliesst. In diesem Zustand hält somit der Elektromagnet 28 die Halteklinke 27 fest, welche ihrerseits über die Haltenase 23 den Steuerarm 22 und damit den Druckspeicher 24 festhält. Damit ist der Betätiger 17 fixiert und die Fangkeile 12 sind über den Hebel 20 und die Anschlusslasche 13 festgehalten. Dadurch ist auch einer versehentlichen Betätigung der Fangkeile, beispielsweise durch versehentliches streifen der Führungsschiene, vorgebeugt.
Weiter ist die Stellung des Betätigers 17 durch einen ersten Positionssensor 38 überwacht. - In einer Ausführung ist die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14, wie weiter in
Fig. 6 ersichtlich, mit einer Montagesperre 41 versehen. Die Montagesperre 41 kann, zur einfachen Montage im Gehäuse, wie in derFig. 6 mittels strichpunktiertem Umriss dargestellt, eingesetzt werden und hält dann den Betätiger, vorzugsweise mechanisch in der Bereitschaftsstellung. Dadurch kann die Einrichtung einfach in die Anschlusslaschen eingefahren und montiert werden. Dies ist hilfreich, da während einer Montage der Fangvorrichtung, bzw. der Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung in der Regel elektrische Teile noch nicht verdrahtet sind. In einer vorteilhaften Ausführung ist diese Montagesperre mit dem Positionssensor 38 gekoppelt, um eine Inbetriebnahme der Aufzugsanlage mit eingesetzter Montagesperre zu verhindern. Nach Montage der Einrichtung, bzw. nach erfolgte elektrischer Verdrahtung und Ansteuerung der Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 kann die Montagesperre 41 entfernt und beispielsweise im Gehäuse mit einer Halteklammer deponiert werden, und die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 ist dann wie vorgängig erläutert vom Elektromagneten 28 in der Bereitschaftsstellung gehalten. - Wird nun der Stromfluss im Elektromagneten 28, beispielsweise durch die Bremssteuerung 46 (siehe
Fig. 1 bis 4 ) oder eine andere Sicherheitseinrichtung, unterbrochen, dann verschwindet dessen Magnetkraft. Die Halteklinke 27 gibt, wie inFig. 7 ersichtlich, die Haltenase 25 des Steuerarms 22, bzw. den Betätiger 17 frei und die Betätigungskraft des Druckspeichers 24 drückt nun die Fangkeile 12 nach oben in die Fangposition. Der Fahrkörper, bzw. die Aufzugskabine oder das Gegengewicht wird zwangsläufig gebremst. Gleichzeitig mit der Betätigung der Fangkeile 12 wird der erste Positionssensor 38 betätigt, womit der Sicherheitskreis 42 der Aufzugsanlage (sieheFig. 4 ) unterbrochen wird. Vorteilhafterweise ist beim Elektromagneten 28 ein zweiter Positionssensor 39, beispielsweise ein Mikroschalter, angeordnet, der die Stellung der Halteklinke 27 selbst überwacht. Dieser zweite Positionssensor 39 kann verwendet sein um ein versehentliches öffnen der Halteklinke 27 frühzeitig zu erkennen, oder auch um eine Rückstellung der Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 zu steuern wie nachfolgend erläutert. - In
Fig. 7 bis 9 wird das Zurückstellen oder Lösen der Fangvorrichtung beispielhaft gezeigt. Die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 umfasst dazu einen Rückführhebel 31, auf welchem der Elektromagnet 28 zusammen mit der Halteklinke 27 und dem zweiten Positionssensor 39 angeordnet ist. Der Rückführhebel 31 ist auf der Schwenkachse 18, schwenkbar gelagert, so dass ein Schwenkradius der Haltenase 23 des Steuerarms 22 und die Halteklinke 27 derselben Schwenkbahn folgen. Der Rückführhebel 31 ist zu einer Rückstelleinrichtung 30 verbunden. Die Rückstelleinrichtung 30 umfasst im Beispiel einen Spindelschlitten 35 der zum Rückführhebel 31 verbunden ist. Der Spindelschlitten 35 wird mittels einer Spindelachse 34 von einem Spindelantrieb 33 vor- und zurückbewegt. Im Weiteren umfasst die Rückstelleinrichtung 30 einen dritten Positionssensor 40, wiederum vorzugsweise einen Mikroschalter, der eine eingefahrene Position des Spindelschlittens 35 und damit des Rückführhebels 31 feststellt. - Bevor nun eine Rückstellung initialisiert wird, ist in der Regel die Fahrkörper entgegen der Fangrichtung zurückbewegt worden. Damit werden die Fangkeile 12 aus ihrer Klemmposition gelöst und sie liegen im Wesentlichen lose, bzw. lediglich durch eine Kraft des Druckspeichers 24 belastet an den Führungsschienen an.
Nach einer erfolgten Bremsung des Fahrkörpers durch die Fangvorrichtung 11 und entsprechend betätigter Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14, wie sie inFig. 7 dargestellt ist, schwenkt nun der Spindelantrieb 33 - nach einer Initialisierung durch die Bremssteuerung 46 (Fig. 4 ) - über die Spindelachse 34 und den Spindelschlitten 35 den Rückführhebel 31 nach unten zum Steuerhebel 22. damit wird die Halteklinke 27 zur Haltenase 23 bewegt, wie inFig. 8 dargestellt. Mit Erreichen der Haltenase 23 drückt die Haltenase 23 die Halteklinke 27 zurück an den eingeschalteten Elektromagneten 28, der nun die Halteklinke 27 wiederum festhält, wie inFig. 9 ersichtlich. Diese Position wird durch den zweiten Positionssensor 39 festgestellt. Dies ist zugleich ein Steuerinput an die Bremssteuerung die Verfahrrichtung des Spindelantriebs 33 zu wenden und den Spindelschlitten 35, nun zusammen mit dem Steuerarm in die Bereitschaftsposition, entsprechend dargestellt inFig. 6 , zurückzubewegen. Diese Bereitschaftsposition ist erreicht, sobald der dritte Positionssensor 40 durch den zurückbewegten Spindelschlitten 35 betätigt wird, wodurch die Rückstellung abgeschlossen und die Einrichtung zur Betätigung und Rückstellung der Fangvorrichtung 14 wieder in ihrer Bereitschaftsposition ist, da gleichzeitig mit dem Zurückziehen des Steuerarms 22 natürlich auch der Druckspeicher 24 wieder gespannt wurde. Ersichtlich ist, dass nun während einem Zurückfahren der Einrichtung, bei einem Fehlverhalten des Fahrkörpers jederzeit, durch Abschaltung des Elektromagneten 28, die Fangvorrichtung direkt wieder betätigt werden kann.
Ergänzend ist zu vermerken, dass anstelle der Spindelrückstellung natürlich auch andere Antriebsarten, wie ein Linearmotor oder ein anderer Schwenkantrieb verwendet werden können. Ein Spindelantrieb ist vorteilhaft, da derartige Spindelantriebe beispielsweise zur Betätigung von Autofenstern häufig verwendet und entsprechend günstig zu beschaffen sind.
Weiter vorteilhafte Ergänzungen sind weiter in denFig. 6 bis 9 ersichtlich. - So ist der Spindelschlitten 35 in einer Ausführung über einen Kraftbegrenzer 36, beispielsweise eine Rasterfeder 37 mit dem Rückführhebel verbunden. Damit ist einer Überlastung der Rückstelleinrichtung 30 vorgebeugt, wenn der Fahrkörper während der Rückstellbewegung selbst bewegt wird, wodurch über die Fangkeile 12 eine unerwartete Druckkraft auf die Rückstelleinrichtung wirken könnte. Der Kraftbegrenzer 36 begrenzt die Druckkraft in der Rückstelleinrichtung, bzw. in der Spindelachse 34 auf etwa 100N. Wird der Maximalwert überschritten, dann kann sich der Spannhebel im Freilauf verschieben. Um den Spannhebel wieder einzurasten wird das Zugglied nach oben bewegt.
Weiter ist eine Form der Halteklinke 27 derart gewählt, dass die Halteklinke wiederum geöffnet wird wenn beispielsweise die nach wie vor festgeklemmten Fangkeile 12 ein zurückziehen derselben verhindern. In diesem Falle kann durch die Kraft der Rückstelleinrichtung 30 die Halteklinke wiederum geöffnet werden. Da zu diesem Zeitpunkt der zweite Positionssensor 39 ebenfalls wieder geöffnet, bzw. betätigt wird, kann die Bremssteuerung diesen Zustand erkennen und die Rückstellung erneut starten.Fig. 10 zeigt eine vorteilhafte Verschaltung der Elektromagneten 28 bei einer typischen Verwendung von zwei Einrichtungen zur Betätigung und Rückstellung von einem Paar Fangvorrichtungen. Hierbei ist, wie in denFig. 1 bis 4 erläutert, jeweils eine Einrichtung zur Betätigung der Fangvorrichtung mit einer Fangvorrichtung verbunden. Die zwei Elektromagneten 28 sind hierbei in Serie geschalten und sind über die Bremssteuerung 46 mit einem erforderlichen Haltestrom beaufschlagt. Mit dieser seriellen Verschaltung sind die beiden Einrichtungen zur Betätigung und Rückstellung der Fangvorrichtung auf Millisekunden genau elektrisch synchronisiert. Die beiden zu betätigenden Fangvorrichtungen lösen somit gleichzeitig aus.
Gleichzeitig wird dadurch auch sichergestellt dass bei einem elektrischen Unterbruch in einer Spule der Elektromagneten 28 beide Fangvorrichtungen auslösen und kein einseitiges schädliches Fangen stattfindet. Eine mechanische Synchronisation mit einem Hebelgestänge ist nicht mehr notwendig. - In
Fig. 11 ist eine zu denFig. 1 bzw. 3 ergänzende oder alternative Ausführung des Sicherheitskonzepts einer Aufzugsanlage 1 welche nicht Teil der Erfindung ist, dargestellt. Hierbei ist die Aufzugskabine 2 mit Fangvorrichtungen 11, 11a, 11b und zugehörigen Einrichtungen zur Betätigung der Fangvorrichtung 14, 14a, 14b mit Bremsteuerung 46 ausgerüstet, wie es vorgängig im Zusammenhang mit denFig. 1 bis 3 beschrieben ist. Dazu gehören optionalerweise auch eine entsprechende Geschwindigkeitssensorik 57 und / oder eine Sicherheitsensorik 62. In diesem Ausführungsbeispiel beinhaltet die Aufzugskabine 2 weiter eine optionale Detektionseinrichtung 60 zur Feststellung eines ungewollten Wegfahrens der Aufzugskabine aus einem Stillstand. Hierbei wird ein Mitlaufrad im Bedarfsfalle an eine Laufbahn der Aufzugskabine angedrückt. Im Normabetrieb ist das Mitlaufrad von der Laufbahn distanziert, es wird nicht angetrieben. Die Detektionseinrichtung 60 beinhaltet einen Sensor, welcher ein Drehen des Mitlaufrads, wenn es im Stillstand an die Laufbahn angedrückt wird, um einen vorbestimmten Drehwinkel feststellt und der bei Überschreitung des vorbestimmten Drehwinkels die Einrichtung zur Betätigung der Fangvorrichtung 14, 14a, 14b unterbricht. Dadurch wird die Fangvorrichtung 11, 11a, 11b betätigt und einem weiteren Wegrutschen der Aufzugskabine ist vorgebeugt. Eine derartige Detektionseinrichtung 60 in der Form einer Überwachungseinrichtung ist in der europäischen AnmeldungEP10195788.4
Das Gegengewicht 3 ist im Unterschied dazu mit einer im Wesentlichen bekannten Fangvorrichtung 11g ausgerüstet, welche durch eine Schlaffseilauslösung 56 betätigt wird. Dies bedeutet, dass die Fangvorrichtung 11g betätigt wird, wenn eine Aufhängekraft, während einer vorbestimmten Zeitdauer unter einen voreingestellten Wert sinkt. Brechen somit beispielsweise die Tragmittel 4 in der Aufzugsanlage, würde die Fangvorrichtung der Aufzugskabine 2 über die Bremssteuerung 46 betätigt und die Aufzugskabine würde sicher gebremst, und wegen der nun plötzlich fehlenden Tragkraft im Tragmittel würde die Schlaffseilauslösung 56 die Fangvorrichtung 11g des Gegengewichts betätigen und das Gegengewicht 3 von einem Absturz sichern. Mittels einer Verzögerungseinrichtung 63, wie beispielsweise mittels Dämpfeinrichtung, in der Schlaffseilauslösung 56 wird erreicht, dass bei einem kurzzeitigen Schwingvorgang keine Auslösung der Fangvorrichtung 11g erfolgt. - Bei Kenntnis der vorliegenden Erfindung kann der Aufzugsfachmann die gesetzten Formen und Anordnungen beliebig verändern. Beispielsweise können. So kann die Bremssteuerung 46 und / oder das Energiemodul 43 und / oder die Geschwindigkeitssensoren 57 als separate Baugruppen ausgeführt sein, oder dieses Baugruppen können in einem Sicherheitspaket zusammengefasst sein. Dieses Sicherheitspaket kann auch Bestandteil einer Aufzugssteuerung sein. Die Einrichtung zur Betätigung sowie allenfalls zur Rückstellung der Fangvorrichtung kann als Baugruppe an eine Fangvorrichtung angebaut sein, oder sie kann auch mit einer Fangvorrichtung, im Wesentlichen eingehäusig zusammengebaut sein.
Im Weiteren kann natürlich anstelle der in denFig. 5 bis 9 dargestellten Fangvorrichtung mit angebauter Einrichtung für die Betätigung und eine Rückstellung der Fangvorrichtung eine Fangvorrichtung mit Einrichtung zur Betätigung der Fangvorrichtung gemäss der Offenbarung der europäischen AnmeldungEP10195791.8
Claims (6)
- Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3), welche jeweils mittels mindestens zwei Führungsschienen (10) geführt sind, das Gegengewicht und die Aufzugskabine sind über ein Tragmittel (4) miteinander verbunden und getragen, wobei das Tragmittel (4) über eine Umlenkrolle oder eine Antriebsscheibe geführt ist, so dass sich das Gegengewicht (3) und die Aufzugskabine (2) gegengleich im Gebäude bewegen,
wobei die Aufzugskabine (2) mindestens zwei an der Aufzugskabine (2) angeordnete Fangvorrichtungen (11,11a, 11b) beinhaltet, welche je einer Führungsschiene (10) zugeordnet sind und welche je mittels einem Fangelement (12) die Führungsschienen (10) zum bedarfsgemässen Abbremsen und Festhalten der Aufzugskabine (2) an den Führungsschienen (10) greifen, und
mit einer an der Aufzugskabine (2) angeordneten Einrichtung (14) für die Betätigung der Fangvorrichtungen, welche mit mindestens einer der Fangvorrichtungen (11,11a, 11b), zur Betätigung derselben in Verbindung steht, und
mit mindestens einer elektronischen Sicherheitseinrichtung (62), welche einen Sicherheitszustand der Aufzugsanlage überwacht und welche im Bedarfsfalle die Einrichtung für die Betätigung der Fangvorrichtungen (14) zur Betätigung der Fangvorrichtung (11,11a, 11b) ansteuert,
wobei das Gegengewicht (3) mindestens zwei an dem Gegengewicht (3) angeordnete Fangvorrichtungen (11,11g) beinhaltet, welche je einer Führungsschiene (10) zugeordnet sind und welche je mittels einem Fangelement (12) die Führungsschienen (10) zum bedarfsgemässen Abbremsen und Festhalten des Gegengewichts (3) an den Führungsschienen (10) greifen,
wobei die Fangvorrichtungen (11,11g) des Gegengewichts (3) mittels einer an dem Gegengewicht (3) angeordneten Einrichtung (14g) für die Betätigung der Fangvorrichtungen, welche mit mindestens einer der Fangvorrichtungen (11,11g), zur Betätigung derselben in Verbindung steht, betätigt werden, und
wobei die an dem Gegengewicht (3) angeordnete Einrichtung (14g) für die Betätigung und Rückstellung der Fangvorrichtung von einer elektronischen Sicherheitseinrichtung (62g) angesteuert ist, und
wobei diese Sicherheitseinrichtung (62g) über ein Ausgleichskabel (49) mit integriertem Kommunikationsbus (47) angesteuert ist. - Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3) gemäss Anspruch 1, wobei das Gegengewicht hierbei über das Ausgleichskabel mit Energie versorgt ist.
- Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3) gemäss Anspruch 2, wobei der Kommunikationsbus zur Übermittlung von Statussignalen verwendet ist.
- Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3) gemäss Anspruch 3, wobei der Kommunikationsbus über eine Powerlineverbindung im Kommunikationsbus geführt ist.
- Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3) nach Anspruch 1, wobei die Energieversorgung des Gegengewichts über einen Akku erfolgt, und wobei der Akkus von einem Generator, welcher in einem Führungsrad, welche das Gegengewicht führt, integriert ist, gespeist ist,
oder wobei der Akku jeweils in einer Halteposition der Aufzugskabine oder des Gegengewichts über eine Kontaktbrücke gespeist ist. - Aufzugsanlage mit einer Aufzugskabine (2) und einem Gegengewicht (3) nach einem der Ansprüche 1 - 5, wobei das Gegengewicht von einem kabinenseitigen Sicherheitssystem über Signalleitungen, welche vorzugsweise in einem Ausgleichskabel integriert sind angesteuert ist.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP10195785 | 2010-12-17 | ||
| PCT/EP2011/072278 WO2012080106A2 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
| EP11791597.5A EP2651808B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
Related Parent Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11791597.5A Division-Into EP2651808B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
| EP11791597.5A Division EP2651808B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2998260A1 EP2998260A1 (de) | 2016-03-23 |
| EP2998260B1 true EP2998260B1 (de) | 2018-10-17 |
Family
ID=44010138
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP15193206.8A Active EP2998260B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
| EP11791597.5A Active EP2651808B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11791597.5A Active EP2651808B1 (de) | 2010-12-17 | 2011-12-09 | Aufzugsanlage mit kabine und gegengewicht |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US9309091B2 (de) |
| EP (2) | EP2998260B1 (de) |
| CN (2) | CN105668375B (de) |
| AU (2) | AU2011344433B2 (de) |
| BR (2) | BR122020024188B1 (de) |
| CA (2) | CA2819799C (de) |
| ES (2) | ES2575327T3 (de) |
| HK (1) | HK1185330A1 (de) |
| MX (2) | MX2013006934A (de) |
| MY (1) | MY167502A (de) |
| NZ (2) | NZ611166A (de) |
| PL (1) | PL2651808T3 (de) |
| RU (1) | RU2583829C2 (de) |
| WO (1) | WO2012080106A2 (de) |
| ZA (1) | ZA201304621B (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11591184B2 (en) | 2019-07-05 | 2023-02-28 | Otis Elevator Company | Elevator assembly with counterweight blocking stop |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2352689B1 (de) * | 2008-12-04 | 2013-04-10 | Inventio AG | Verfahren zum lösen eines lastaufnahmemittels oder eines ausgleichsgewichts eines aufzugs aus einer fangstellung |
| EP2785626B1 (de) * | 2011-11-29 | 2015-10-14 | Inventio AG | Sicherheitsbremse mit zurückstellung |
| US9136749B1 (en) * | 2012-09-28 | 2015-09-15 | John M. Callier | Elevator electrical power system |
| CN103754721B (zh) * | 2014-01-21 | 2016-08-17 | 刘小木 | 电梯轿箱人工刹车制动装置 |
| CN106458511B (zh) | 2014-06-12 | 2019-04-12 | 奥的斯电梯公司 | 用于悬挂结构的制动系统重置机构 |
| ES2713691T3 (es) | 2014-06-12 | 2019-05-23 | Otis Elevator Co | Mecanismo de accionamiento del miembro de freno |
| ES2727947T3 (es) * | 2014-08-07 | 2019-10-21 | Inventio Ag | Sistema de ascensor, sistema de freno para un sistema de ascensor y procedimiento para el control de una instalación de freno de un sistema de ascensor |
| WO2016096320A1 (de) * | 2014-12-17 | 2016-06-23 | Inventio Ag | Aufzugsanlage mit einem bremssystem |
| WO2017019236A1 (en) * | 2015-07-27 | 2017-02-02 | Wurtec Elevator Products & Services | Elevator counterweight signaling system |
| US10584014B2 (en) | 2015-12-07 | 2020-03-10 | Otis Elevator Company | Robust electrical safety actuation module |
| US20170267492A1 (en) * | 2016-03-15 | 2017-09-21 | Otis Elevator Company | Self-powered elevator car |
| US10252884B2 (en) | 2016-04-05 | 2019-04-09 | Otis Elevator Company | Wirelessly powered elevator electronic safety device |
| US10246295B2 (en) * | 2016-04-06 | 2019-04-02 | Otis Elevator Company | Protective device for speed sensing device |
| US10315886B2 (en) * | 2016-04-11 | 2019-06-11 | Otis Elevator Company | Electronic safety actuation device with a power assembly, magnetic brake and electromagnetic component |
| US10214387B2 (en) | 2016-05-13 | 2019-02-26 | Otis Elevator Company | Magnetic elevator drive member and method of manufacture |
| US10587180B2 (en) * | 2016-05-13 | 2020-03-10 | Otis Elevator Company | Magnetic elevator drive member and method of manufacture |
| EP3312125A1 (de) * | 2016-10-19 | 2018-04-25 | Aip Aps | Aufzugsysteme |
| US10501286B2 (en) | 2017-05-12 | 2019-12-10 | Otis Elevator Company | Simultaneous elevator car and counterweight safety actuation |
| CN107043051A (zh) * | 2017-05-27 | 2017-08-15 | 合肥酷特信息科技有限公司 | 一种电梯安全控制系统 |
| US20190002241A1 (en) * | 2017-06-28 | 2019-01-03 | Otis Elevator Company | Elevator car power supply system |
| CN107601204A (zh) * | 2017-10-19 | 2018-01-19 | 中联重科股份有限公司 | 升降机 |
| ES2922492T3 (es) | 2017-12-07 | 2022-09-15 | Inventio Ag | Dispositivo paracaídas para un cuerpo móvil, instalación de ascensor con un dispositivo paracaídas y procedimiento para el desbloqueo de un dispositivo paracaídas |
| EP3587327B1 (de) * | 2018-06-28 | 2020-10-14 | Otis Elevator Company | Elektromagnetische führung für elektronischen sicherheitsauslöser |
| EP3608276A1 (de) * | 2018-08-10 | 2020-02-12 | Otis Elevator Company | Elektrischer aufzugssicherheitsaktuator |
| EP3608275B1 (de) * | 2018-08-10 | 2021-07-28 | Otis Elevator Company | Steuergerät eines elektrischen aufzugssicherheitsaktuators |
| DE202018104891U1 (de) * | 2018-08-24 | 2018-10-08 | Wittur Holding Gmbh | Bremsfangvorrichtung für den Montagebetrieb |
| EP3620419A1 (de) | 2018-09-07 | 2020-03-11 | KONE Corporation | Progressives sicherheitsgetriebesystem mit konstanter verzögerung |
| KR101996595B1 (ko) * | 2018-09-19 | 2019-07-04 | 주식회사 휴먼엔티 | 엘리베이터의 안전장치 |
| US11807493B1 (en) | 2018-10-15 | 2023-11-07 | Otis Elevator Company | Retrofitted hoist machine |
| EP3670416A1 (de) | 2018-12-20 | 2020-06-24 | Otis Elevator Company | Sicherheitsbremse für ein gegengewicht, aktivierbar durch ein tragmittel |
| CN111377336A (zh) * | 2018-12-27 | 2020-07-07 | 三菱电机上海机电电梯有限公司 | 电梯安全钳楔块 |
| CN111891873B (zh) * | 2020-08-05 | 2022-01-25 | 鹤山扬阳智能机械装备有限公司 | 一种电梯制动组件 |
| CN113830641B (zh) * | 2021-09-15 | 2024-05-07 | 康力电梯股份有限公司 | 上行超速保护装置 |
| DE102022113871A1 (de) | 2022-06-01 | 2023-12-07 | Tk Elevator Innovation And Operations Gmbh | Sicherheitsvorrichtung für einen Fahrkorb einer Aufzugsanlage mit einer Sensoreinrichtung |
| US11975945B1 (en) | 2022-11-28 | 2024-05-07 | Otis Elevator Company | Frictionless safety brake actuator |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2493553A (en) * | 1948-08-18 | 1950-01-03 | Otis Elevator Co | Safety apparatus for elevators |
| US2490653A (en) * | 1948-09-02 | 1949-12-06 | Otis Elevator Co | Safety mechanism for elevators |
| SU550327A1 (ru) * | 1969-01-10 | 1977-03-15 | Чкд Прага Обороны Подни (Фирма) | Устройство дл подачи сигналов из клети шахтной подъемной установки |
| US3601227A (en) * | 1970-06-15 | 1971-08-24 | Clark Equipment Co | Emergency brake control system for elevators |
| AU548742B2 (en) * | 1981-06-15 | 1986-01-02 | Anglo American Corporation Of South Africa Limited | Slack rope detecting apparatus |
| ES2109972T3 (es) | 1991-11-18 | 1998-02-01 | Inventio Ag | Dispositivo de activacion de equipos de seguridad. |
| JPH06180653A (ja) | 1992-10-02 | 1994-06-28 | Hudson Soft Co Ltd | 割り込み処理方法および装置 |
| US6173813B1 (en) * | 1998-12-23 | 2001-01-16 | Otis Elevator Company | Electronic control for an elevator braking system |
| CN101028900B (zh) * | 2001-06-29 | 2012-02-15 | 三菱电机株式会社 | 电梯紧急制动装置 |
| JP4987213B2 (ja) * | 2001-06-29 | 2012-07-25 | 三菱電機株式会社 | エレベータの非常ブレーキ装置 |
| DK1401757T4 (da) | 2001-07-04 | 2011-10-24 | Inventio Ag | Fremgangsmåde til forhindring af en uforsvarligt høj kørehastighed af en elevators lastoptagelsesmiddel |
| US7575099B2 (en) | 2003-10-07 | 2009-08-18 | Otis Elevator Company | Remotely resettable ropeless emergency stopping device for an elevator |
| EP2189410B1 (de) | 2004-06-02 | 2013-12-25 | Inventio AG | Überwachungssystem für ein Aufzug |
| RU2356824C2 (ru) * | 2004-12-29 | 2009-05-27 | Отис Элевейтэ Кампэни | Способ компенсации дисбаланса нагрузки в лифтовой установке и лифтовая установка |
| FI119877B (fi) * | 2005-08-19 | 2009-04-30 | Kone Corp | Hissin turvajärjestely |
| TW200744936A (en) * | 2005-11-28 | 2007-12-16 | Inventio Ag | Lift installation with equipment for compensation for the weight difference between the cage runs and the counterweight runs of the support means and method of realising such compensation |
| CN101223097B (zh) * | 2006-03-20 | 2012-08-08 | 三菱电机株式会社 | 电梯装置 |
| KR100973881B1 (ko) * | 2006-07-27 | 2010-08-03 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터 장치 |
| TWI394705B (zh) * | 2007-02-02 | 2013-05-01 | Inventio Ag | 升降機及監視此升降機之方法 |
| CN101646619B (zh) * | 2007-04-26 | 2012-05-09 | 三菱电机株式会社 | 电梯装置 |
| KR101573552B1 (ko) * | 2007-11-14 | 2015-12-11 | 인벤티오 아게 | 승강실을 구동 및 지탱시키기 위한 승강기 구동장치 및 방법, 대응하는 방법 및 승강실을 감속 및 지탱시키기 위한 제동 장치 및 방법, 및 관련된 방법 |
| EP2263961B1 (de) * | 2008-04-15 | 2015-10-21 | Mitsubishi Electric Corporation | Aufzugsvorrichtung |
| FI20105033A (fi) * | 2010-01-18 | 2011-07-19 | Kone Corp | Menetelmä hissikorin liikkeen valvomiseksi sekä hissijärjestelmä |
| EP2560909B1 (de) * | 2010-04-19 | 2014-08-20 | Inventio AG | Betriebszustandsüberwachung von tragmitteln in einer aufzugsanlage |
| WO2012004268A1 (de) * | 2010-07-09 | 2012-01-12 | Inventio Ag | Überwachung von tragmitteln in einer aufzugsanlage |
| CA2855873C (en) * | 2011-12-20 | 2020-06-16 | Inventio Ag | Lift installation |
-
2011
- 2011-12-09 AU AU2011344433A patent/AU2011344433B2/en active Active
- 2011-12-09 CN CN201610086132.XA patent/CN105668375B/zh active Active
- 2011-12-09 NZ NZ611166A patent/NZ611166A/en not_active IP Right Cessation
- 2011-12-09 NZ NZ70490411A patent/NZ704904A/en not_active IP Right Cessation
- 2011-12-09 CN CN201180060620.9A patent/CN103261073B/zh active Active
- 2011-12-09 WO PCT/EP2011/072278 patent/WO2012080106A2/de active Application Filing
- 2011-12-09 EP EP15193206.8A patent/EP2998260B1/de active Active
- 2011-12-09 MY MYPI2013002155A patent/MY167502A/en unknown
- 2011-12-09 MX MX2013006934A patent/MX2013006934A/es active IP Right Grant
- 2011-12-09 EP EP11791597.5A patent/EP2651808B1/de active Active
- 2011-12-09 BR BR122020024188-8A patent/BR122020024188B1/pt active IP Right Grant
- 2011-12-09 ES ES11791597.5T patent/ES2575327T3/es active Active
- 2011-12-09 BR BR112013014977-9A patent/BR112013014977B1/pt active IP Right Grant
- 2011-12-09 CA CA2819799A patent/CA2819799C/en active Active
- 2011-12-09 ES ES15193206T patent/ES2703362T3/es active Active
- 2011-12-09 RU RU2013130305/11A patent/RU2583829C2/ru active
- 2011-12-09 PL PL11791597.5T patent/PL2651808T3/pl unknown
- 2011-12-09 CA CA3028212A patent/CA3028212C/en active Active
- 2011-12-09 US US13/989,960 patent/US9309091B2/en active Active
- 2011-12-09 MX MX2015013929A patent/MX343414B/es unknown
-
2013
- 2013-06-21 ZA ZA2013/04621A patent/ZA201304621B/en unknown
- 2013-11-14 HK HK13112778.8A patent/HK1185330A1/zh unknown
-
2017
- 2017-04-07 AU AU2017202323A patent/AU2017202323B2/en active Active
Non-Patent Citations (1)
| Title |
|---|
| None * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11591184B2 (en) | 2019-07-05 | 2023-02-28 | Otis Elevator Company | Elevator assembly with counterweight blocking stop |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2998260B1 (de) | Aufzugsanlage mit kabine und gegengewicht | |
| EP2651810B1 (de) | Einrichtung für die betätigung und die rückstellung einer fangvorrichtung | |
| EP2651809B1 (de) | Betätigung einer fangvorrichtung | |
| EP2547617B1 (de) | Aufzugsanlage mit bremseinrichtung | |
| EP2651807B1 (de) | Überwachungseinrichtung zur feststellung eines ungewollten wegfahrens einer aufzugskabine aus einem stillstand | |
| EP1733992B2 (de) | Bremsfangvorrichtung | |
| EP2760777B1 (de) | Bremseinrichtung mit elektromechanischer betätigungseinrichtung | |
| EP3197812B1 (de) | Aufzugbremse | |
| EP3197811B1 (de) | Aufzugbremse | |
| EP2352689B1 (de) | Verfahren zum lösen eines lastaufnahmemittels oder eines ausgleichsgewichts eines aufzugs aus einer fangstellung | |
| WO2014075954A1 (de) | Aufzug mit einer sicherheitsbremse | |
| EP3122679A1 (de) | Bremseinrichtung für einen fahrkorb einer aufzuganlage | |
| DE202019105584U1 (de) | Auslöseeinheit zum Betätigen einer Aufzugbremsvorrichtung | |
| DE102012016336A1 (de) | Geschwindigkeitsbegrenzer für ein Aufzugsystem | |
| EP2043936A1 (de) | Mehrfunktionale elektronische notbremsfangeinrichtung typ,,isg | |
| EP3617119B1 (de) | Bremsfangvorrichtung für den montagebetrieb | |
| DE102008049379A1 (de) | Notbefreiungssystem für Aufzüge | |
| DE102019106627A1 (de) | Fangbremseinrichtung und Fangbremsverfahren | |
| DE102009040109A1 (de) | Geschwindigkeitsbegrenzer für ein Aufzugsystem | |
| WO2011032582A1 (de) | Notbefreiungssystem, insbesondere für aufzüge |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 2651808 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| 17P | Request for examination filed |
Effective date: 20160908 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20180508 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AC | Divisional application: reference to earlier application |
Ref document number: 2651808 Country of ref document: EP Kind code of ref document: P |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502011014884 Country of ref document: DE Ref country code: AT Ref legal event code: REF Ref document number: 1053760 Country of ref document: AT Kind code of ref document: T Effective date: 20181115 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20181211 Year of fee payment: 4 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20181017 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2703362 Country of ref document: ES Kind code of ref document: T3 Effective date: 20190308 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190117 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190217 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190117 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190118 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190217 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502011014884 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181209 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| 26N | No opposition filed |
Effective date: 20190718 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20181231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181017 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20181017 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20111209 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1053760 Country of ref document: AT Kind code of ref document: T Effective date: 20191209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20211220 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20220110 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231219 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20240130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20231226 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221210 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20221210 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231227 Year of fee payment: 13 Ref country code: CH Payment date: 20240102 Year of fee payment: 13 |