EP1020173A2 - Gehwagen - Google Patents
Gehwagen Download PDFInfo
- Publication number
- EP1020173A2 EP1020173A2 EP99124233A EP99124233A EP1020173A2 EP 1020173 A2 EP1020173 A2 EP 1020173A2 EP 99124233 A EP99124233 A EP 99124233A EP 99124233 A EP99124233 A EP 99124233A EP 1020173 A2 EP1020173 A2 EP 1020173A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- walking trolley
- frame
- walker
- handle
- walking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 claims description 2
- 241001272996 Polyphylla fullo Species 0.000 description 7
- 239000000969 carrier Substances 0.000 description 4
- 239000003814 drug Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 210000000245 forearm Anatomy 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 239000012141 concentrate Substances 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000008092 positive effect Effects 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
- A61H2003/043—Wheeled walking aids for patients or disabled persons with a drive mechanism
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/04—Wheeled walking aids for patients or disabled persons
- A61H2003/046—Wheeled walking aids for patients or disabled persons with braking means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1614—Shoulder, e.g. for neck stretching
Definitions
- the invention relates to a walker to support the walking process of a human being, with a frame on which two rear wheels with brakes and at least one steerable front wheel are arranged, which is a device has to support the upper body, and arranged on the at least one handle is.
- walkers People who are unable or difficult to stand or walk on their own can often use so-called walkers as aids. Have this a frame that largely bears the weight of the user. To the The frame has several wheels attached, which on the one hand have a secure stand should ensure, and on the other hand, enable the walker during of going to roll forward.
- walkers that help the user keep their balance. This type is mainly used by older people who then turn to Support the walker with your own strength and keep it in front of you push here.
- walkers are used by the disabled for regular use Standing or walking is important from a medical point of view, but not or only are partially able to carry their own weight. With these walkers it is not enough if the user can rely on it, he must rather are held by the walker so securely that a fall is avoided.
- Similar walkers are also used in rehabilitation medicine. She are used to help people after an accident or a long illness Gain or regain the ability to walk. Often such a person cannot carry their own weight, and often that is too Coordination ability impaired.
- All of these types of walkers are usually equipped with brakes, thus an uncontrolled rolling away on sloping ground or when entering of the walker is prevented.
- the front wheels are steerable with these walkers, and the brakes act on the two rear wheels.
- There is a brake handle for each rear wheel provided with which the brake of the wheel in question can be operated.
- the disadvantage here is that the two rear wheels are separated from each other but equally strong and have to be braked at the same time. However, this is sufficient good coordination ability of the user ahead. When uneven or the walker performs uncontrolled braking of the two wheels after a time delay Movements. In extreme situations, this can even cause the User.
- the task is solved in a walker of the type mentioned above by that one connected to the brakes of both rear wheels Brake actuator is provided on the handle.
- the handle with the brake actuator is optionally in one position to operate by the right hand or in a position to operate by the left hand can be arranged, a user can use the walker regardless of whether he brakes this activity with the right or with the left hand can execute.
- the handle can preferably be moved between the two positions because then the walker can be adapted to the possibilities of the respective user can.
- the frame has one of the support surfaces opening to support the upper body. If a user is concerned with his upper body in this opening, he can on the Support the contact surfaces. It can then be held entirely by the frame or at least stick to it with little effort. This enables weak users to use the walker.
- armpads are provided in the walker, they can absorb the entire weight of the user. Without any action on his part, he becomes safe held and cannot fall. The burden on the user is reduced to one Reduced to a minimum, e.g. Rehabilitation patients particularly early can start training again. This will improve them Chances of success considerably.
- the user has by pressing both brakes with an actuator at all times safely under the walker Control. That gives him self-confidence and self-confidence that also have a positive effect on therapy.
- the armpits should be adjustable in height to accommodate the physical peculiarities to be adapted to the respective user. Because of this, there are many Users will be able to use the possibilities of the walker.
- the walker can be adapted even more flexibly to the respective user, if the armpits are also laterally adjustable to each other, or if they are pivotable about a vertical axis.
- the stability of the walker increases considerably.
- a further development of the walker is characterized by a drive for Moving the walker out. This makes it a user Moving the walker is easier. Even users who are unable are able to move the walker forward automatically with such a train the powered walker to walk. Because the walker through the If the drive is moved, you only need to move the legs accordingly follow the movement of the walker. A walking movement of the user is forced as it were.
- the structure of such a Realize the walker particularly easily. Because the front wheel is steerable curves can also be made.
- On the handle of the walker should be a driving switch to control the Drive arranged because the user then moving the Control the walker and the walker with the brake actuator on the Handle can brake.
- a further training is characterized by two handles, the Brake actuator is arranged on one of the handles, and by Travel switch on both handles, the drive only for driving of the walker is controlled when the driving switch is on both handles be operated. This can avoid that the walker by accidental touch of a travel switch.
- Means for controlling the front wheel should be provided so that the User can determine the direction in which the walker is moved.
- an actuating device for the Control means is provided on the handle. So the user can Check the direction of movement with the handle.
- the walker can be made more flexible because of the lower and the upper subframe each take on different tasks to which they can then be specifically tailored.
- the upper partial frame is then preferably adjustable in height on the lower one Subframe arranged. This allows the walker to adapt to the body size of the Be customized.
- gas springs can be used to support the height adjustment of the upper subframe.
- the height of the Easy adjustment of the walker which means that even weak users can set the correct height for themselves.
- the width of the opening is adjustable. This allows adjust the walker to users of different body sizes.
- Rails for attaching accessories should be provided on the walker his. Especially when the walker is used in rehabilitation medicine will enable accident patients to learn to walk again Rails e.g. to attach a drip to it. It is then not necessary in addition to carry a drip stand with the walker.
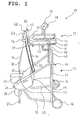
- Fig. 1 shows a walker 10 with an upper frame 11, on the later is discussed in more detail, and with a lower subframe 12, the after rear (to the right in Fig. 1) is open, so that a user from behind in the lower subframe 12 can occur.
- two rear wheels 14, 16 are arranged, each have a brake, not shown in FIG. 1.
- Two lower legs 18, 20 of the lower subframe 12 extend from the two rear wheels 14, 16 forward (in Fig. 1 to the left) and are on their front ends crescent-shaped so that their openings point downwards. At the front ends of the two lower legs 18, 20 there is one Support wheel arranged, of which only the one support wheel 22 can be seen in FIG. 1 is.
- the track of the two support wheels is similar to the track of the two rear wheels 14, 16.
- a box-shaped housing 24 arranged, the batteries and electronics for a drive motor records, which is described in more detail below.
- the housing 24 has a flap 26 that can be opened for maintenance work.
- a front wheel 28 steerably attached. The front wheel 28 is driven by a wheel hub motor as the drive motor, which is not shown in FIG. 1 is drawn.
- a tongue-shaped housing part 30 projects out of the housing 24 toward the front in front.
- a motor for steering the front wheel 28 and a slip ring contact arranged to power the Drive motor even with a rotation of the front wheel 28 to 360 ° and guaranteed beyond that.
- the motor for the steering and the Slip ring contacts are not shown in Fig. 1.
- One to the user facing surface 32 of the housing 24 are not shown in FIG. 1 Control elements such as a main power switch and a charge / capacity indicator arranged for the accumulators.
- Two standpipes 34, 36 in run at the rear of the lower subframe 12 about vertically from bottom to top, which are open towards the top.
- the Standpipes 34, 36 are telescopic two support tubes 38, 40 of the upper one Subframe 11 and gas springs not shown in Fig. 1 arranged. The gas springs tension the support tubes 38, 40 upwards.
- At the top of the Standpipes are arranged two adjustment levers, of which only one in Fig. 1 Adjustment lever 44 is located. By loosening the two adjustment levers the two support tubes 38, 40 in the two standpipes 34, 36 upwards or are shifted below, whereby the height of the upper subframe 11 can be adjusted. By tightening the two adjustment levers, the support tubes become 38, 40 found in the standpipes 34, 36.
- the support tubes 38, 40 are mutually alternate at their upper ends, initially bent forward and then upward.
- the upper end of the support tube 38 is attached to a first bracket 46 and the upper end of the support tube 40 attached to a second support 48.
- the first and second carriers 46, 48 each have a padded pad 50, 52 on their tops. Together the carriers 46, 48 together with the supports 50, 52 form a U-shaped Support surface.
- the first carrier 46 is one with the second carrier 48 vertical axis pivotally connected.
- a lever 54 provided with which the carriers 46, 48 can be locked to each other.
- the lever 54 is released, the first carrier 46 and the second can be Swing carrier 48 towards each other about the vertical axis. This allows the Size of the opening of the U-shaped support surface can be changed.
- an armpit support 56, 58 On the outer sides of the carrier 46, 48 is an armpit support 56, 58 with each a mutually curved rod and a pad.
- clamping lever of which only one clamping lever 60 for the axillary support 58 is shown, the armpit supports 56, 58 can be fixed on the supports 46, 48 become. If the respective clamping lever 60 is released, the height of the corresponding axillary support 56, 58 adjusted and this about a vertical axis be rotated.
- Handles 62, 64 On the underside of the carriers 46, 48 are L-shaped in the front area Handles 62, 64 arranged so that they from the bottom of the carrier 46, 48th point forward and are then bent upwards.
- the handles 62, 64 have at their tops a driving switch 66, 68, which by a Control line 70, 72 each with the electronics for the engine control in the Housing 24 are connected.
- a brake handle 74 is provided on the handle 64, which is operated via two cable pulls 76, 78 is connected to the brakes of the rear wheels 14, 16, respectively.
- Fig. 2 shows another view of a part of the stroller 10. Same Elements as in Fig. 1 have the same reference numerals as there.
- the padding of the axillary supports 56, 58 are rotatable on the curved rods and can each be by means of a Wing screw 57, 59 can be fixed.
- a main power switch 82 On the surface 32 of the housing 24 are a main power switch 82 and one State of charge / capacity indicator 84 arranged for the batteries.
- Fig. 3 shows the handle 62 with the travel switch 66.
- The is not shown Control line 70.
- the handle 62 has a supporting tube 86 and attached to it a clamp 88, the opening of which preferably has a rectangular cross section.
- the clamp 88 is placed on an upward-pointing pin 90 of a holder 92, which is attached to the underside of the carrier 46, not shown in FIG. 3.
- the pin 90 preferably has a slightly smaller one, the opening of the clamp 88 corresponding rectangular cross section.
- the handle 64 is similar removably attached to a bracket.
- a user steps into the lower frame part 12 between the wheels 14, 16, 28. His upper body is then in the opening of the U-shaped support surface.
- the walker can be used by the user be adjusted.
- the axillary supports 56, 58 preferably support the user under his armpits so that practically his entire weight from them will be carried.
- the height of the padded pads 50, 52 should be like this that the user places his forearms on the supports 50, 52 can hang up.
- the size of the opening of the U-shaped support surface between The pads 50, 52 are set so that the user can comfortably seat them finds. If the settings are made in this way, the individual elements the upper subframe 11 by tightening the levers 44, 54, 60 fixed.
- the handles 62, 64 by plugging onto the pin 90 of the Brackets 92 are interchanged.
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Rehabilitation Tools (AREA)
- Liquid Crystal (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
Abstract
Description
- Fig. 1
- ein Ausführungsbeispiel eines Gehwagens,
- Fig. 2
- einen Teil des Gehwagens in einer anderen Ansicht, und
- Fig. 3
- einen umsteckbaren Griff des Gehwagens.
Claims (21)
- Gehwagen (10) zum Unterstützen des Gehvorganges eines Menschen, mit einem Rahmen, an dem zwei hintere Räder (14, 16) mit Bremse und mindestens ein lenkbares vorderes Rad (28) angeordnet sind, der eine Vorrichtung zum Abstützen des Oberkörpers hat, und an dem mindestens ein Handgriff (62, 64) angeordnet ist, dadurch gekennzeichnet, daß ein mit den Bremsen beider hinterer Räder (14, 16) verbundenes Bremsbetätigungsorgan (74) an dem Handgriff (64) vorgesehen ist.
- Gehwagen (10) nach Anspruch 1, dadurch gekennzeichnet, daß, der Handgriff (64) mit dem Bremsbetätigungsorgan (74) wahlweise in einer Position zum Betätigen durch die rechte Hand oder in einer Position zum Betätigen durch die linke Hand angeordnet sein kann.
- Gehwagen (10) nach Anspruch 2, dadurch gekennzeichnet, daß der Handgriff (64) zwischen beiden Positionen umsetzbar ist.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß der Rahmen eine von Auflageflächen (50, 52) zum Abstützen des Oberkörpers umgebene Öffnung hat.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß Achselstützen (56, 58) vorgesehen sind.
- Gehwagen (10) nach Anspruch 5, dadurch gekennzeichnet, daß die Achselstützen (56, 58) höhenverstellbar sind.
- Gehwagen (10) nach Anspruch 5 oder 6, dadurch gekennzeichnet, daß die Achselstützen (56, 58) seitlich verstellbar sind.
- Gehwagen (10) nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, daß die Achselstützen (56, 58) um eine vertikale Achse schwenkbar sind.
- Gehwagen (10) nach Anspruch 8, dadurch gekennzeichnet, daß die Achselstützen (56, 58) exzentrisch zu der Achse an dem Rahmen befestigt sind.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, gekennzeichnet durch zwei Stützräder (22), die jeweils neben dem vorderen Rad (28) in einem axialen Abstand von diesem an dem Rahmen angeordnet sind.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß ein Antrieb zum Fortbewegen des Gehwagens (10) vorgesehen ist.
- Gehwagen (10) nach Anspruch 11, dadurch gekennzeichnet, daß der Antrieb das vordere Rad (28) antreibt.
- Gehwagen (10) nach Anspruch 11 oder 12, dadurch gekennzeichnet, daß ein Fahrschalter (68) zum Steuern des Antriebs an dem Handgriff (64) angeordnet ist.
- Gehwagen (10) nach Anspruch 13, gekennzeichnet durch zwei Handgriffe (62, 64), wobei das Bremsbetätigungsorgan (74) an einem der Handgriffe (64) angeordnet ist, und durch Fahrschalter (66, 68) an beiden Handgriffen (62, 64), wobei der Antrieb nur dann zum Antreiben des Gehwagens (10) gesteuert wird, wenn die Fahrschalter (66, 68) an beiden Handgriffen (62, 64) betätigt werden.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß Mittel zum Steuern des vorderen Rades (28) vorgesehen sind.
- Gehwagen (10) nach Anspruch 15, dadurch gekennzeichnet, daß eine Betätigungsvorrichtung für die Steuermittel an dem Handgriff (64) vorgesehen ist.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß der Rahmen einen unteren Teilrahmen (12) und einen damit verbundenen oberen Teilrahmen (11) hat.
- Gehwagen (10) nach Anspruch 17, dadurch gekennzeichnet, daß der obere Teilrahmen (11) höhenverstellbar an dem unteren Teilrahmen (12) angeordnet ist.
- Gehwagen (10) nach Anspruch 18, dadurch gekennzeichnet, daß Gasfedern zum Unterstützen der Höhenverstellung des oberen Teilrahmens (11) vorgesehen sind.
- Gehwagen (10) nach einem der Ansprüche 4 bis 19, dadurch gekennzeichnet, daß die Breite der Öffnung verstellbar ist.
- Gehwagen (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß Schienen zum Befestigen von Zubehör vorgesehen sind.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE29900419U | 1999-01-13 | ||
| DE29900419U DE29900419U1 (de) | 1999-01-13 | 1999-01-13 | Gehwagen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1020173A2 true EP1020173A2 (de) | 2000-07-19 |
| EP1020173A3 EP1020173A3 (de) | 2001-06-20 |
Family
ID=8067868
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99124233A Withdrawn EP1020173A3 (de) | 1999-01-13 | 1999-12-03 | Gehwagen |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1020173A3 (de) |
| DE (1) | DE29900419U1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9289347B2 (en) | 2014-02-06 | 2016-03-22 | Richard Randal Powell | Erect posture mobility device with low turn radius |
| DE102017127568B3 (de) | 2017-11-22 | 2019-05-16 | Disco Drives Kirschey Gmbh | Rollator mit elektrischem Antrieb |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10110735A1 (de) * | 2001-03-01 | 2002-09-19 | Cheryl Iona Benger | Gerät zum Erlernen/Ausüben des Eis- und Rollschuhlaufens. Abw. Gerät wie oben, jedoch zusätzlich mit Plattform zum Stehen |
| DE102006028105A1 (de) * | 2006-06-19 | 2007-12-20 | Reinhart, Anton | Bremshilfsgefährt für Rollschuhfahrer, insbesondere für Inline-Skater |
| DE202008009807U1 (de) | 2008-07-21 | 2008-10-02 | Bongartz, Karin | Entlastungseinrichtung für einen Rollator |
| DE102008049035A1 (de) | 2008-09-25 | 2010-04-01 | Schaeffler Kg | Stützhilfe zur Unterstützung einer Person |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3872945A (en) * | 1974-02-11 | 1975-03-25 | Falcon Research And Dev Co | Motorized walker |
| US4212493A (en) * | 1978-09-25 | 1980-07-15 | Ledesky Eugenia A | Apparatus for assisting semi-invalid person to walk |
| US4226413A (en) * | 1978-11-08 | 1980-10-07 | Daugherty Wilma J | Wheel mounted walker with foot pedal brake |
| US4443902A (en) * | 1981-07-06 | 1984-04-24 | Baer Richard K | Invalid walker and transfer device |
| SE452105B (sv) * | 1985-02-19 | 1987-11-16 | Avesta Ab | Gastol |
| DE9206417U1 (de) * | 1992-05-17 | 1992-10-29 | MEYRA Wilhelm Meyer GmbH & Co KG, 4925 Kalletal | Gehhilfe |
| US5538268A (en) * | 1994-01-03 | 1996-07-23 | Miller; Jonathan J. | Foldable walking stabilizer device for physically disabled persons |
| DE19619078A1 (de) * | 1996-05-13 | 1997-11-20 | Expresso Deutschland | In eine Transportkarre umwandelbare Gehhilfe |
-
1999
- 1999-01-13 DE DE29900419U patent/DE29900419U1/de not_active Expired - Lifetime
- 1999-12-03 EP EP99124233A patent/EP1020173A3/de not_active Withdrawn
Non-Patent Citations (1)
| Title |
|---|
| None |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9289347B2 (en) | 2014-02-06 | 2016-03-22 | Richard Randal Powell | Erect posture mobility device with low turn radius |
| DE102017127568B3 (de) | 2017-11-22 | 2019-05-16 | Disco Drives Kirschey Gmbh | Rollator mit elektrischem Antrieb |
| US10675206B2 (en) | 2017-11-22 | 2020-06-09 | Disco Drives Kirschey Gmbh | Electrically driven wheeled walker |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1020173A3 (de) | 2001-06-20 |
| DE29900419U1 (de) | 1999-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2750653B1 (de) | Therapeutischer gehtrainer | |
| DE69533978T2 (de) | Rollstuhl | |
| DE19921503A1 (de) | Anbaueinheit für eine Bahre | |
| DE102007061708B4 (de) | Personenfahrzeug | |
| DE2341190A1 (de) | Rollstuhl mit eigenantrieb | |
| DE102015000270A1 (de) | Mobile Geh- und Transporthilfe-Vorrichtung | |
| EP0068215A1 (de) | Vorrichtung für eine passive Beinbewegung | |
| DE102012015758A1 (de) | Rollstuhl | |
| DE102009022560A1 (de) | Vorrichtung zur therapeutischen Behandlung und/oder zum Training der unteren Extremitäten eines Menschen | |
| EP2258331B1 (de) | Einrichtung zum Aufrichten einer Person | |
| DE1203907B (de) | Standstuetze | |
| DE102009026283A1 (de) | Lenkrollen-Arretierungssystem für medizinische Transportfahrzeuge | |
| WO2018086659A1 (de) | Ankipphilfe für rollatoren | |
| EP1020173A2 (de) | Gehwagen | |
| DE69934191T2 (de) | Bewegungshilfe | |
| WO1992019202A1 (de) | Rollstuhl, insbesondere für querschnittgelähmte menschen | |
| DE29802643U1 (de) | Fortbewegungs- und/oder Trainingsgerät | |
| DE840575C (de) | Zimmerfahrstuhl mit Handantrieb fuer Koerperbehinderte | |
| DE202015000207U1 (de) | Mobile Geh- und Transporthilfe-Vorrichtung | |
| DE112020006000T5 (de) | Sitz für fahrgeschäfte und system zum ein- und aussteigen von fahrgästen auf/von mindestens einen/einem sitz | |
| DE202010001916U1 (de) | Gehhilfe zur Unterstützung der Fortbewegung einer gehbehinderten Person | |
| DE69612393T2 (de) | Zusammenbau eines bettes zur bewegungsunterstützung für eine in das bett ein- und aussteigende person | |
| DE202011110430U1 (de) | Rollator | |
| DE202019004058U1 (de) | Gehhilfe | |
| EP4059486B1 (de) | Schiebevorrichtung zum einsatz als gehhilfe oder zum transport einer last |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| AKX | Designation fees paid | ||
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: 8566 |
|
| 18W | Application withdrawn |
Withdrawal date: 20020304 |