-
HINTERGRUND DER ERFINDUNG
-
Technisches Gebiet
-
Die
vorliegende Erfindung bezieht sich auf ein mobiles Endgerät und einen
Server in einem Navigationssystem zum Vorsehen einer Fahrtroutenführung für ein Fahrzeug,
und insbesondere auf ein mobiles Endgerät und einen Server, die in
einem Navigationssystem vorgesehen sind, in welchem die Navigationsfunktion durch
Verwendung eines Nachfragesystems durch Kommunikationen zwischen
dem mobilen Endgerät,
das nicht mit einer Kartendatenbank ausgestattet ist, und einem
Server, der mit einer Kartendatenbank ausgestattet ist, erhalten
werden kann.
-
Stand der Technik
-
Herkömmlich wurden
verschiedene Navigationssysteme dieser Art offenbart, wobei ein
derartiger Fall derjenige ist, der in der nationalen
japanischen Veröffentlichung der übersetzten
Version Nr. 10-505420 offenbarte ist.
-
1 ist
ein schematisches Diagramm, das die Ausbildung eines herkömmlichen
Navigationssystems zeigt, das in der vorgenannten nationalen Veröffentlichung
offenbart ist. In der Figur bezeichnet die Zahl 1 ein mobiles
Teil, die Zahl 2 bezeichnet ein festes Teil, und die Zahl 3 bezeichnet
ein Mobiltelefon-Netzwerk, durch das das feste Teil 1 und
das mobile Teil 2 gegenseitig miteinander verbunden sind.
-
In
dem mobilen Teil bezeichnet die Zahl 10 ein Mobiltelefon
wie ein Freisprech-Mobiltelefon, die Zahl 11 bezeichnet
einen Audioausgang, 12 bezeichnet einen Audioeingang, und 13 bezeichnet
eine Funkantenne. Die Zahl 14 bezeichnet einen DTMF(Tastwahl)-Decodierer
zum Übersetzen
von DTMF-Signalen, die Zahl 15 bezeichnet einen GPS(Globales
Positionierungssystem)-Satellitenempfänger zum
Erhalten der geographischen Position des Mobilteils 1,
in welchem der GPS-Empfänger selbst
vorgesehen ist, 16 bezeichnet einen DTMF-Codierer zum Codieren
von Signalen in DTMF-Signale, 17 bezeichnet
eine Schnittstellen-Steuervorrichtung zum Empfangen von Signalen
von dem DTMF-Decodierer 14 und
dem GPS-Empfänger 15 und
auch zum Zuführen
von Signalen zu dem DTMF-Codierer 16, die Zahl 18 bezeichnet
einen Lautsprecher, um dem Telefon 10 zu ermöglichen,
für Sprache
verwendet zu werden, und die Zahl 19 bezeichnet ein Mikrofon,
das für
denselben Zweck verwendet wird.
-
In
dem festen Teil 2 bezeichnet die Zahl 20 einen
DTMF-Decodierer, 21 bezeichnet einen DTMF-Codierer, und 22 bezeichnet
eine Schnittstellen-Steuervorrichtung. Weiterhin bezeichnet die
Zahl 23 einen Computer, der mit dem Mobiltelefon-Netzwerk 3 mittels
des DTMF-Decodierers 20 und des DTMF-Codierers 21 und auch
mittels der Schnittstelle 22 verbunden ist, und die Zahl 24 bezeichnet
eine den Computer 23 bildende Anzahl von Servern. Die Zahl 25 bezeichnet
eine geographische Datenbank, zu der durch jeden dieser Server 24 zugegriffen
wird, die Zahl 26 bezeichnet eine Datenbank von Nachrichten, 29 bezeichnet
einen Eingang zum Aktualisieren der geographischen Datenbank 25,
und die Zahl 28 bezeichnet Sprachnachrichten, die von dem
Computer 23 erzeugt und zu dem Mobiltelefon-Netzwerk 3 übertragen
werden.
-
Die
Arbeitsweise der herkömmlichen
Vorrichtung wird nun wie folgt erläutert.
-
Hier
ist jeder der Server 24 innerhalb des Computers 23 jedem
der aktiven Mobilteile 1 mittels des Mobiltelefon-Netzwerks 3 zugewiesen.
Das Mobilteil 1 erhält
Ortsinformationen durch Verwendung des GPS-Empfängers 15 und überträgt die so
erhaltenen Informationen zusammen mit einer Anforderung für Richtungen
zu einem bestimmten Bestimmungsort zu dem festen Teil 2.
In dem festen Teil 2 bezieht der entsprechende Server 24 die
Ortsinformationen auf seine geographische Datenbank 25,
erhält
mit dem Ort assoziierte Nachrichteninformationen von der Nachrichtendatenbank 26 und überträgt die Informationen
zurück
zu dem Mobilteil 1.
-
Der
Computer 23 kann Nachrichten im DTMF-Code durch Verwendung
des DTMF-Codierers 21 übertragen,
oder er kann Sprachnachrichten erzeugen, die über einen Sprachausgang 28 zu
dem Mobiltelefon-Netzwerk übertragen
werden.
-
Wenn
die Position eines Fahrzeugs (das heißt, die Position des Mobilteils 1)
durch Verwendung der DTMF-Signale
zu dem Computer 23 übertragen
wird, kann der Computer 23 einem Fahrzeug oder einer dritten Person,
die dies anfordert, Informationen oder eine Routenführung liefern.
-
Zuerst
fordert am Beginn der Fahrt der Fahrer eines Fahrzeugs, in welchem
das Mobilteil 1 befestigt ist, einen Service durch Aktivieren
einer vorgewählten
Steuerung an dem Mobiltelefon 10 an. Diese Serviceanforderung
wird über
das Mobiltelefon-Netzwerk 3 zu der Schnittstellen-Steuervorrichtung 22 in
dem festen Teil 2 übertragen.
Die Schnittstellen-Steuervorrichtung 22 teilt dann einen
freien Server 24 zu, um den Ruf zu beantworten und den
GPS-Empfänger 15 des
Mobilteils 1 für
die Bestimmung seiner geographischen Position zu befragen. Die von
dem GPS-Empfänger 15 ausgegebenen
Längen-
und Breitengrad-Datenwerte werden durch dem DTMF-Codierer 16 des
Mobilteils 1 in DTMF-Tonpaare übersetzt.
-
Das
Mobiltelefon 10 koppelt dieses Audiosignal in seinen Spracheingangspfad
des Audioeingangs 12, und der mit dem Lautsprecher 18 gekoppelte
DTMF-Decodierer 14 decodiert
die Überwachungsdaten
im DTMF-Format, die von dem entsprechenden Server 24 des
festen Teils 2 zurückkommen,
um den Empfang von Ortsnachrichten zu bestätigen.
-
Weiterhin
kann der Computer 23 in dem festen Teil 2 einerseits
das Mobilteil 1 rufen, das automatisch auf diesen Ruf antwortet,
und dann seinen Ort unter Verwendung des DTMF-Signalisierungssystems
vorsehen, oder andererseits kann er einen Ruf von dem Mobilteil 1 empfangen,
das die DTMF-codierte Identität
des Mobilteils 1 enthalten kann, und auch den Fahrzeugort
unter Verwendung der Schnittstellen-Steuervorrichtung 17 vorsehen.
-
Der
Server 24 greift dann zu der geographischen Datenbank 25 auf
der Grundlage der gegenwärtigen Position
des Benutzers und identifiziert den Bereich, in den diese gegenwärtige Position
fällt.
Der Server 24 verschafft sich auch jede permanente benutzerspezifische
Information wie den Typ des Fahrzeugs, die relevant für die auszuwählende Route
sein kann, beispielsweise aufgrund von Höhen- oder Gewichtsbeschränkungen.
Der Benutzer kann solche Anforderungen für gegenwärtige Daten, die nicht permanent,
aber für
die gegenwärtige
Informationsanforderung spezifisch sind (insbesondere seinen Bestimmungsort)
codieren unter Verwendung der Telefontastatur des Mobiltelefons 10 mit
Bezug auf Sprachanforderungen. Es ist jedoch zu beachten, dass bei
einem bevorzugten Ausführungsbeispiel
der Ruf einem menschlichen Operator für die Beschaffung dieser Daten
präsentiert
wird, und dies ermöglicht
dem Benutzer, Unterstützung
beim Identifizieren seines gewünschten
Bestimmungsorts zu dem System zu erhalten, und ermöglicht auch,
seine Anforderungen zu sprechen, wodurch seine Augen und seine Hände für das Fahren
freigehalten werden.
-
Der
Operator führt
dann eine Fernprogrammierung der Schnittstellen-Steuervorrichtung 17 in
dem Mobilteil 1 mit Systemdaten, die den Fahrzeug-Bestimmungsort identifizieren,
zur Verwendung für
nachfolgende Datenaktualisierungsvorgänge durch und veranlasst die
Erzeugung von sprachgegebenen Richtungen und Anweisungen an den
Fahrer durch ein Spracherzeugungs-Subsystem des Computerservers 24 des
festen Teils 2.
-
Positionsfixierungen
können
in regelmäßigen Intervallen
wie nach jeweils 2 Minuten oder nach jedem Kilometer durchgeführt werden.
Alternativ kann das feste Teil 2 das Mobilteil 1 auffordern,
seine nächste
Position nach einem bestimmten Intervall oder Abstand zu senden.
-
Wenn
der Fahrer der Route folgt, können
weitere Anweisungen automatisch gesendet werden, wenn der Fahrer
in einen neuen Bereich eintritt, der Fahrer kann darauf aufmerksam
gemacht werden, wenn die Route verlassen wurde oder wenn neue Verkehrsprobleme
erfasst wurden, die den individuellen Fahrer beeinträchtigen.
-
Dieses
System ist so ausgebildet, dass, wenn dieses System ein Mobilteil
lokalisiert, das in einen Bereich eintritt, der eine für es bestimmte
Nachricht hat, beispielsweise die nächste Wendeanweisung (oder
eine Fehlernachricht für
den Fall, dass das Mobilteil 1 die ausgewählte Route
verlassen hat), diese Nachricht gesendet wird. Dieses System kann
auch so ausgebildet sein, dass es Nachrichten zu Benutzern überträgt, die andere
als das fragliche Mobilteil 1 sind, beispielsweise, um
die Bewegung von wertvollen Ladungen zu überwachen.
-
Bei
dem wie vorstehend ausgebildeten herkömmlichen Navigationssystem
ist das mobile Endgerät (Mobilteil 1)
eine Vorrichtung zum rechtzeitigen Liefern der Informationen zu
einem Benutzer, die dieser benötigt, um
seinen Bestimmungsort zu erreichen, durch Mitteilen der Ortsinformationen
von ihm selbst zumindest in jedem Bereich zu dem Server 24 des
festen Teils 2, so dass selbst in dem Fall, in welchem
keine neuen Informationen von dem Server 24 erforderlich
sind, jedes Mal, wenn er in einen neuen Bereich eintritt, Kommunikationen
zum Erhalten von für
das Erreichen des Bestimmungsorts benötigter Informationen durchgeführt werden,
was zu einer Zunahme des Gesamtkommunikationsverkehrs führt.
-
Weiterhin
ist nichts über
eine Verbesserung des Verfahrens für einen Benutzer, um seinen
Bestimmungsort dem Server 24 des festen Teils 2 mitzuteilen,
gesagt.
-
Es
ist darauf hinzuweisen, dass das Navigationssystem, in welchem ein
mobiles Endgerät
nicht mit einer Kartendatenbank ausgestattet ist, sondern die Navigationsfunktion
durch Erhalten der Kartendatenbank mittels Kommunikationen ausführen kann,
auch in einem anderen Dokument offenbart ist, nämlich der
japanischen Patentanmeldung Nr. 7-320196 und
dergleichen. Das Navigationssystem in diesem Dokument ist dasjenige,
bei dem die durch das GPS erhaltenen Ortsinformationen, die auf
der Seite des mobilen Endgeräts empfangen
werden, zu dem Zentrum (Server) mittels eines PHP-Endgeräts übertragen
werden, und das Zentrum sendet diese Kartendaten und Verkehrsinformationen
auf der Grundlage der Ortsinformationen zurück.
-
Jedoch
werden in diesem Dokument, obgleich das Verfahren zum Herunterladen
der Kartendaten und der Verkehrsinformationen mittels eines PHP-Endgeräts auf der
Seite des mobilen Endgeräts
offenbart ist, weder konkrete Verfahrensschritte für den Herunterladevor gang
noch die Weise, in der sie verwendet werden, erläutert.
-
Die
DE 43 00 927 A offenbart
ein Navigationssystem, in welchem ein mobiles Endgerät, das nicht
mit einer Karte an Bord versehen ist, eine Ortserfassungsvorrichtung
aufweist und mit einem zentralen Server kommuniziert. Der zentrale
Server berechnet eine Route auf der Grundlage der gegenwärtigen Position
und des gewünschten
Bestimmungsorts, die ihm von dem mobilen Endgerät durch Verwendung des Mobilfunks übertragen
wurden. In dem mobilen Endgerät
erfolgt ein Vergleich zwischen der gegenwärtigen Position und den Fahrtroutendaten,
die von dem zentralen Server übertragen
wurden, um das das mobile Endgerät
tragende Fahrzeug zu dem Bestimmungsort zu führen. Es ist möglich, dass
der Benutzer die von dem zentralen Server übertragenen Fahrtroutendaten
korrigiert, indem er Korrekturdaten über eine Tastatur in das mobile
Endgerät
eingibt, für
den Fall, dass die gegenwärtige
Position von der berechneten Route abweicht. Diese Korrekturdaten
werden auch von dem mobilen Endgerät zu dem zentralen Server übertragen.
-
Die
EP-A-0 580 167 beschreibt
eine Fahrzeugrouten-Führungsvorrichtung,
in der eine Routenführungsschaltung
die von einer Bestimmungsschaltung für die gegenwärtige Position
erhaltene gegenwärtige Position
und die durch eine Routenberechnungsschaltung erhaltene Route vergleicht
für die
Erfassung eines Routenabweichzustands. Wenn der Routenabweichzustand
erfasst wird, werden eine Suchtaste sowie die Route und der gegenwärtige Ort
auf einer Anzeigevorrichtung angezeigt. Wenn die Suchtaste berührt wird,
erfolgt wieder eine Suche nach einer neuen Route von der gegenwärtigen Position
zu dem Bestimmungsort. Dann wird die Routenführung wieder gestartet in Abhängigkeit
von dem Suchergebnis. Wenn die Suchtaste nicht berührt wird,
werden die Route und der gegenwärtige
Ort weiterhin angezeigt, während
das die Vorrichtung tragende Fahrzeug außerhalb der Route fährt, wodurch
wirksam verhindert wird, dass die Vorrichtung einen unnötigen Suchvorgang
durchführt,
wenn der Fahrer absichtlich außerhalb
der Route fährt.
-
Weiterhin
zeigt die
US-A-5 243
528 eine Fahrzeugnavigationsvorrichtung, die eine visuelle
Anzeige einer berechneten Navigationsroute mit einer visuellen Anzeige
der Richtung der gewünschten
Fahrt entlang der Navigationsroute vorsieht. Ein Außerroutenkarten-Anzeigebereich ist
vorgesehen, der eine visuelle Navigationsroutenanzeige in einer
Farbe hat, und in einer zweiten kontrastierenden Farbe eine visuelle
Anzeige der tatsächlichen
Fahrzeugfahrt. Ein separates zusätzliches
Merkmal besteht darin, dass die Außerroutenanzeige einen visuellen
Anzeigebereich von mehreren vom Operator auswählbaren Außerrouten-Wiedergewinnungsoptionen
vorsieht. Außerrouten-Wiedergewinnungsmittel
sind derart vorgesehen, dass der Fahrzeugoperator die visuell angezeigten
Wiedergewinnungsoptionen implementieren kann. Das Ergebnis ist ein
Navigationssystem, das visuell Fahrzeugnavigationsinformationen
für den
Fahrzeugoperator in einem verbesserten minimalen Verständniszeitformat
vorsieht und dem Fahrzeugoperator ermöglicht, selbst auszuwählen, wie die
Wiedergewinnung von einem Außerroutenzustand
erfolgen soll.
-
Schließlich offenbart
die
DE 196 51 146 A einen
Server in einem Navigationssystem, der eine Kartendatenbank aufweist
und Routenführungsdaten
auf der Grundlage der Karte zu mobilen Benutzern unter Verwendung
der Funktelefonie überträgt. Der
Server empfängt
Daten, die die gegenwärtige
Position darstellen, einen gewünschten
Bestimmungsort und eine Routenanforderung von einem mobilen Endgerät, zieht
eine Route heraus und überträgt sie zu
dem Endgerät.
Der Benutzer gibt die Bestimmungsortdaten in das Endgerät ein, falls
erforderlich, mit der Hilfe eines Adressenspeichers, der in dem
Endgerät
installiert ist. Der Server prüft,
ob die Bestimmungsortdaten korrekt, vollständig und eindeutig sind.
-
Die
vorliegende Erfindung wurde vorgeschlagen, um die vorgenannten Probleme
zu lösen,
und es ist eine Aufgabe der vorliegenden Erfindung, ein mobiles
Endgerät
in einem Navigationssystem vorzusehen, das in der Lage ist, die
Frequenz von Kommunikationen zwischen dem mobilen Endgerät und dem
Server auf einen minimalen Pegel herabzusetzen und die Navigationsfunktion
unter Verwendung eines Nachfragesystems durchzuführen, wobei das mobile Endgerät nicht
mit einer Kartendatenbank ausgestattet ist.
-
OFFENBARUNG DER ERFINDUNG
-
Diese
Aufgabe wird erfindungsgemäß gelöst durch
ein mobiles Endgerät,
das die Merkmale des Anspruchs 1 aufweist. Bevorzugte Ausführungsbeispiele
des Endgeräts
sind in den jeweiligen abhängigen
Ansprüchen
definiert.
-
Gemäß einem
ersten Aspekt der vorliegenden Erfindung weist ein mobiles Endgerät in einem
Navigationssystem zum Durchführen
von Kommunikationen im Wege einer Kommunikationsleitung enthaltend
eine Funktelefonleitung und zum Vorsehen einer Routenführung für Benut zer
auf der Grundlage der durch die Kommunikationen enthaltenen Daten
auf: eine Ortserfassungsvorrichtung zum kontinuierlichen Erfassen
des Ortes des mobilen Endgeräts
selbst, eine Empfangsvorrichtung zum Empfangen von Daten einer ersten
empfehlbaren Fahrtroute, die von einer Kartendatenbank über die
Kommunikationsleitung übertragen
wurden, welche Daten einer ersten empfehlbaren Fahrtroute eine optimale
Route darstellen, die den Ort des mobilen Endgeräts selbst an einem Startpunkt
und einen von dem Benutzer ausgewählten Bestimmungsort verbindet,
eine Vergleichsvorrichtung zum Vergleichen der Daten einer ersten
empfehlbaren Fahrtroute mit dem gegenwärtigen Ort, der von der Ortserfassungsvorrichtung
erfasst wurde, eine Anzeigevorrichtung zum Anzeigen einer Richtung,
in der sich der Benutzer bewegen sollte, auf der Grundlage des Ergebnisses
des von der Vergleichsvorrichtung durchgeführten Vergleichs, und eine
Anforderungsvorrichtung für
eine neue Route zum Übertragen einer
Anforderung nach Daten einer zweiten empfehlbaren Fahrtroute zu
der Kartendatenbank über
die Kommunikationsleitung für
den Fall, dass als ein Ergebnis des Vergleichs eine vorbestimmte
Abweichung des Ortes des mobilen Endgeräts von der geführten Route
gemäß den Daten
der ersten empfehlbaren Fahrtroute überschritten wird, wobei die
Daten der zweiten empfehlbaren Fahrtroute eine optimale Route darstellen,
die den Ort des mobilen Endgeräts
selbst an dem Punkt, an dem die Abweichung erfasst wurde, und den
Bestimmungsort verbindet, wobei die Empfangsvorrichtung für den Empfang
auch der Daten der zweiten empfehlbaren Fahrroute vorgesehen ist,
die von der Kartendatenbank über
die Kommunikationsleitung übertragen
wurden, und die Vergleichsvorrichtung auch für den Vergleich der Daten der
zweiten empfehlbaren Fahrtroute mit dem von der Ortserfassungsvorrichtung
erfassten gegenwärtigen Ort
vorgesehen ist, eine Speichervorrichtung zum Speichern der über die
Kommunikationsleitung empfangenen Daten in einem Speicher, eine
Verarbeitungsvorrichtung zum aufeinanderfolgenden Verarbeiten der über die
Kommunikationsleitung empfangenen Daten, eine Speicherüberwachungsvorrichtung
zum überwachen,
ob die summierte Größe des Speicherbereichs,
der nach der Beendigung der von der Verarbeitungsvorrichtung durchgeführten Verarbeitung
verfügbar gemacht
wurde, ausreichend groß ist
für den
Empfang weiterer Daten oder nicht, und eine Anforderungsvorrichtung
für fortgesetzte
Daten zum Übertragen
einer Anforderung zur Übertragung
der fortgesetzten Daten zu der Kommunikationsleitung für den Fall,
dass das Ergebnis der Überwachung
ausreichend groß für den Empfang
weiterer Daten ist und angezeigt wird, dass die empfangenen Daten
fortgesetzte Daten enthalten.
-
KURZBESCHREIBUNG DER ZEICHNUNGEN
-
1 ist
ein schematisches Diagramm, das die Systemkonfiguration eines herkömmlichen
Navigationssystems zeigt.
-
2 ist
ein schematisches Diagramm, das die gesamte Ausbildung des Navigationssystems
gemäß der vorliegenden
Erfindung zeigt.
-
3 ist
eine Illustration, die die allgemeine Ansicht eines das Navigationssystem
nach 2 bildenden mobilen Endgeräts zeigt.
-
4 ist
ein schematisches Diagramm, das die innere Ausbildung eines tragbaren
Telefons innerhalb des mobilen Endgeräts zeigt.
-
5 ist
ein schematisches Diagramm, das die innere Ausbildung des Informationsendgeräts vom am Fahrzeug
befestigten Typ innerhalb der mobilen Endgerätevorrichtung zeigt.
-
6 ist
ein Flussdiagramm, das die Arbeitsweise des Navigationssystems nach
der vorliegenden Erfindung zeigt.
-
7 ist
eine Illustration, die die Veränderung
von auf dem Monitor des Navigationssystems während des seines Betriebs angezeigten
Bildern zeigt.
-
8 ist
eine Illustration, die einen beispielhaften Fall für eine von
dem Navigationssystem nach der vorliegenden Erfindung herausgezogenen
Routenkarte zeigt.
-
9 ist
ein Flussdiagramm, das im Einzelnen den wichtigen Teil der Operation
des Navigationssystems zeigt.
-
10 ist
ein Flussdiagramm, das die Arbeitsweise des Navigationssystems zeigt.
-
11 ist
eine Illustration, die den wichtigen Teil der Bildanzeige während des
Betriebs zeigt.
-
12 ist
eine Illustration, die eine Rückkehr
zu der Führungsroute
erläutert.
-
13 ist
ein Flussdiagramm, das die Arbeitsweise des Navigationssystems zeigt.
-
14 ist
ein Flussdiagramm, das die Arbeitsweise des Navigationssystems zeigt.
-
BESTE ART DER AUSFÜHRUNG DER
ERFINDUNG
-
Die
vorliegende Erfindung wird nun mit Bezug auf angefügte Zeichnungen
erläutert,
um die vorliegende Erfindung im Einzelnen zu erklären.
-
Erstes Vergleichsbeispiel
-
Das
Navigationssystem gemäß dem ersten
Beispiel ist als seine gesamte in 2 gezeigte
Systemkonfiguration versehen mit einem in einem Fahrzeug vorgesehenen
mobilen Endgerät 101 und
einem in dem Kommunikationszentrum vorgesehenen Server 102.
Das mobile Endgerät 101 ist über ein
Mobiltelefon-Netzwerk 103 und ein Netzwerk 104 für ein festes
Telefon wie ein Netzwerk für
ein leitungsgebundenes Telefon oder dergleichen mit dem Server 102 verbunden,
so dass Datenkommunikationen möglich
sind. Der Server 102 ist mit einer Kartendatenbank 105 wie
einem CD-ROM, in welchem Kartendaten gespeichert sind, versehen.
-
Es
ist festzustellen, dass, wie in der allgemeinen Ansicht von 3 gezeigt
ist, das mobile Endgerät 101 durch
ein Informationsendgerät 200 vom
mit einem Fahrzeug verbundenen Typ und ein tragbares Telefon 210 gebildet
ist, wobei das tragbare Telefon 210 mit dem Endgerät 200 verbunden
ist und Datenkommunikationen mit dem Server 102 über das
Mobiltelefon-Netzwerk 103 und das Telefonnetzwerk 104 durchführt, und versehen
ist mit einer Funktion des Erfassens seiner Position durch Empfangen
eines Signals von dem GPS-Satelliten.
Die Bezugszahl 201 innerhalb des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ ist eine Monitorvorrichtung wie ein
LCD-Monitor, und die Zahl 202 bezeichnet einen Operationsschalter.
-
Hier
wird, für
den Fall, dass ein Cursor auf dem Schirm der Monitorvorrichtung 201 beobachtet
wird, durch Herunterdrücken
der Pfeile (↑, →, ↓, ←), die auf
den Operationsschaltern angezeigt sind, der Cursor in der Richtung,
die durch die derart heruntergedrückten Pfeile bestimmt ist,
aufeinanderfolgend von einem wirksamen Punkt zu einem anderen auf
dem Schirm verschoben, und durch Herunterdrücken des Mittelbereichs der
Operationstaste 202 (der durch ☐ angezeigte Bereich),
nachdem der Cursor einen gewünschten
Bereich erreicht hat, wird die Position des Cursors wirksam gemacht,
und die Operation geht zu dem nächsten
Vorgang. Weiterhin ist die Bezugszahl 211 in dem tragbaren
Telefon 210 eine in einem Notfall zu verwendende Betätigungstaste,
wobei durch Herunterdrücken
dieser Betätigungstaste 211 die
Informationen, die den Umstand anzeigen, dass dies ein Notfall ist,
und seine Ortsinformationen automatisch zu einem vorbestimmten Notfallzentrum
oder dergleichen übertragen
werden.
-
Als
Nächstes
ist die detaillierte innere Ausbildung des tragbaren Telefons 210 in 4 gezeigt.
In der Figur bezeichnet die Zahl 301 eine Antenne, 302 bezeichnet
eine GPS-Empfängerschaltung
und 303 bezeichnet eine Ortsberechnungsschaltung, wobei
ein von dem GPS-Satelliten gesendetes Signal als ein elektrisches Signal
von der Antenne 301 empfangen wird und die über die
Antenne 301 empfangenen Ortsinformationen als sein Breiten-
und Längengrad
durch diese GPS-Empfängerschaltung 302 und
die Ortsberechnungsschaltung 303 erhalten werden. Das Erhalten
der Ortsinformationen durch Verwendung dieser Antenne 301,
der GPS-Empfängerschaltung 302 und
der Ortsberechnungsschaltung 303 entspricht der "Ortserfassungsvorrichtung" in jedem der Ansprüche.
-
Die
Zahl 304 bezeichnet eine für das Senden und/oder Empfangen
von Funkwellen in normalen tragbaren Telefonen verwendete Antenne, 305 bezeichnet
eine Hochfrequenzschaltung eines tragbaren Telefons zum Verarbeiten
von Hochfrequenzsignalen, und die Zahl 306 be zeichnet eine
Signalverarbeitungsschaltung eines tragbaren Telefons zum Verarbeiten
von Audio- und digitalen Signalen. Die Zahl 307 bezeichnet
ein Mikrofon zur Eingabe von zu übertragender
menschlicher Sprache, die Zahl 308 bezeichnet eine Tastatur
zur Verwendung für
die Telefonwahl und so weiter, 309 bezeichnet einen Lautsprecher
zum Ausgeben empfangener menschlicher Sprache, und die Zahl 310 bezeichnet
eine Monitorvorrichtung zum Anzeigen von Eingaben in die Tastatur 308 oder
dergleichen. Durch diese Elemente wird die Funktion als ein normales
tragbares Telefon erhalten.
-
Weiterhin
bezeichnet die Zahl 311 eine Schnittstellenschaltung (nachfolgend
nur als "I/F-Schaltung" bezeichnet), die
Zahl 312 bezeichnet einen I/F-Verbinder. Diese I/F-Schaltung 311 erhält die Ortsinformationen von
der Ortsberechnungsschaltung 303, wenn der Benutzer seine
Ortsinformationen durch Herunterdrücken der Operationstaste 211 oder
dergleichen wie in 3 gezeigt überträgt, und überträgt sie zu der Signalverarbeitungsschaltung 306 des
tragbaren Telefons. Weiterhin überträgt die I/F-Schaltung 311 Informationen
auch in dem Fall, in welchem sie eine Anforderung zur Übertragung
der Ortsinformationen von einem externen Personalcomputer oder dergleichen
(nicht gezeigt) über
den I/F-Verbinder 312 empfängt, und sie stellt auch eine Anpassung
zwischen dem Personalcomputer und der Signalverarbeitungsschaltung 306 des
mobilen Telefons in dem Fall her, in welchem der Personalcomputer
Datenkommunikationen oder dergleichen über das später erläuterte Mobiltelefon-Netzwerk 103 durchführt. Es
ist festzustellen, dass seine Kopplung mit dem Informationsendgerät 200 vom
am Fahrzeug befestigten Typ auch über den I/F-Verbinder 312 durchgeführt wird.
-
Als
Nächstes
ist die innere Ausbildung des Informationsendgeräts 200 vom am Fahrzeug
befestigten Typ in 5 gezeigt. In der Figur bezeichnet
die Zahl 401 einen Verbinder zum Verbinden des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ und des tragbaren Telefons 210,
die Zahl 402 bezeichnet einen Mikrocomputer, 403 bezeichnet
einen Speicher, der mit dem Mikrocomputer 402 verbunden
ist und Daten speichert. Die Zahlen 404a, 404b, 404c, 404d und 404e bezeichnen
Schalter, von denen jeder in Verbindung mit der Betätigung des
entsprechenden der Pfeile (↑, →, ↓, ←), die auf
den Betätigungstasten
angezeigt sind, oder der Betätigung
des Mittelbereichs hiervon (der durch ☐ angezeigte Bereich)
arbeitet.
-
Die
Arbeitsweise des Navigationssystems wird nachfolgend erläutert.
-
Hier
ist 6 ein Flussdiagramm, das die Arbeitsweise des
in den 3 bis 5 gezeigten Navigationssystems
zeigt, wobei die linke Hälfte
der Illustration den in dem mobilen Endgerät 101 ablaufenden
Vorgang anzeigt, während
die rechte Hälfte
den Vorgang im Server 102 anzeigt. 7 ist eine
Illustration, die aufeinanderfolgend die Veränderung von auf dem Monitor 201 des
Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ dargestellten Bildern erläutert, wenn
das System gemäß dem vorgenannten
Flussdiagramm betrieben wird. Hier zeigen alle dargestellten Beispiele
aus Gründen
der Zweckmäßigkeit
den Fall, in welchem es in den Vereinigten Staaten verwendet wird.
-
7(a) zeigt ein anfängliches Bild, das auf dem
Monitor 201 des Informationsendgeräts 200 vom am Fahrzeug
befestigten Typ dargestellt ist. In diesem Zustand kann eine Auswahl
erfolgen durch Herunterdrücken
eines der Pfeile der Operationstaste 202, um den Cursor
innerhalb der Monitorvorrichtung zu bewegen, um entweder "Enroute" (zum Verschieben
des dargestellten Bildes zu demjenigen für die Einstellung der Routenerfassung)
oder "Audio" (zum Verschieben
des dargestellten Bildes zu demjenigen für die Einstellung der Audiofunktion)
auszuwählen,
und danach wird die Auswahl beendet durch Herunterdrücken des
Mittelbereichs der entsprechenden Operationstaste 202 (des
durch ☐ angezeigten Bereichs).
-
Es
wird hier angenommen, dass "Enroute" ausgewählt ist.
Da die Audiofunktion nicht auf die vorliegende Erfindung bezogen
ist, wird die Erläuterung
hiervon hier weggelassen. Jedoch ist leicht vorstellbar, dass der
Mikrocomputer 402 ein Bild auf dem Monitor 201 darstellt,
das die Betätigung
des Benutzers veranlasst, so dass er verschiedenen audiobezogene
Einheiten (nicht gezeigt) steuert, die in dem Informationsendgerät 200 vom
am Fahrzeug befestigten Typ vorinstalliert oder mit diesem verbunden
sind.
-
Wenn "Enroute" ausgewählt ist,
versucht zuerst der Mikrocomputer 402 des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ, Bestimmungsort-Einstelldaten zum Einstellen
des Bestimmungsorts in den Schritten ST601A und ST601B von dem Server
zu erhalten. Mit anderen Worten, im Schritt ST601A wählt der
Mikrocomputer 402 die voreingestellte Nummer des Servers 102 an
und weist das tragbare Telefon 210 an, eine Datenkommunikation
zu ermöglichen.
Wenn die Telefonverbindung hergestellt ist, fordert der Mikrocomputer 402 eine Übertragung
der Bestimmungsort-Einstelldaten über das
tragbare Telefon 210, das Mo biltelefon-Netzwerk 103 und
das Telefonnetzwerk 104 zu dem Server 102 an.
Bei Empfang dieser Anforderung überträgt der Server 102 die
Bestimmungsort-Einstelldaten im Schritt ST601B zu dem Telefonnetzwerk 104. Diese
Bestimmungsort-Einstelldaten werden von dem Telefonnetzwerk 104 zu
dem Informationsendgerät 200 vom
am Fahrzeug befestigten Typ über
das Mobiltelefon-Netzwerk 103 und
das tragbare Telefon 210 übertragen und schließlich über den
Verbinder 401 in den Mikrocomputer 402 eingegeben.
Bei Empfang dieser Bestimmungsort-Einstelldaten bestimmt der Mikrocomputer 402 im
Schritt ST602 einen Bestimmungsort durch Kommunikation mit dem Benutzer,
wie nachfolgend erläutert
wird.
-
Die 7(b) und 7(c) sind
dargestellte Bilder zur Anzeige, in welchem Teil der Vereinigten
Staaten der Bestimmungsort existiert. Zuerst wird, wie in 7(b) gezeigt ist, der Benutzer aufgefordert,
einen Anfangsbuchstaben des Namens eines Zielstaats auszuwählen. Danach
bewegt der Benutzer den Cursor durch Betätigen der Operationstaste 202 des
Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ, um den vorgenannten Anfangsbuchstaben
zu spezifizieren. Hier wird der Buchstabe "M" ausgewählt.
-
Nachdem
der Anfangsbuchstabe bestätigt
ist, wird das auf dem Monitor 201 des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ dargestellte Bild zu dem in 7(c) gezeigten geändert. In derselben Figur sind
Namen von acht Staaten aus ganz Amerika, die mit dem Buchstaben "M" beginnen, aufgeführt und auf dem Monitor 201 angezeigt.
Es ist zu beachten, dass, obgleich nur vier Namen in 7(c) aufgeführt sind, durch Drücken der
Pfeile (↑, ↓) der Operationstaste 202 der
Cursor aufwärts
und abwärts
verschoben wird, um die Namen der Staaten zu verschieben, und durch
weiteres Drücken
dieser Pfeile, selbst nachdem der oberste oder unterste Bereich
erreicht ist, können
die Namen sämtlicher
dieser acht Staaten angezeigt werden. Der Benutzer kann den Namen
eines gewünschten
Staats durch Drücken
dieser Operationstaste 202 bestimmen unter Bezugnahme auf
das auf dem Monitor 201 dargestellte Bild. Hier wird der
Staat "Michigan" ausgewählt.
-
Wenn "Michigan" ausgewählt ist,
wird als Nächstes
eine Stadt oder ein Landkreis darin bestimmt. Die 7(d) und 7(e) sind Bilder, die angezeigt werden
zum Bestimmen einer Stadt oder eines Landkreises innerhalb des Staats
Michigan. Die Bestimmung einer dieser Städte oder Landkreise wird auch
in derselben Weise wie die der Bestimmung eines der Staaten durchgeführt. Mit
anderen Worten, in 7(d) wählt der
Benutzer den Anfangsbuchstaben einer Stadt oder eines Landkreises
aus. Hier wurde der Buchstabe "D" ausgewählt. Danach
werden, wie in 7(e) gezeigt ist, Städte und
Landkreise, deren Namen mit "D" beginnen, sämtlich aufgeführt. Obgleich
angenähert
20 Städte
und Landkreise, die mit dem Buchstaben "D" beginnen,
im Staat Michigan existieren, wurde die Stadt "Detroit" hier ausgewählt.
-
Wenn
der Name "Detroit" ausgewählt ist,
wird ein Bild wie in 7(f) gezeigt
auf dem Monitor 201 dargestellt, und eine Auswahl des Typs
des Bestimmungsorts wird erbeten. Der Benutzer wählt eine der Kategorien des
Bestimmungsorts aus der Gruppe "Flughafen", "Krankenhaus", "Station", "Museum", "Bank" und "Einkaufen" aus. Hier wird "Flughafen" ausgewählt.
-
Wenn "Flughafen" ausgewählt ist,
wird ein Bild wie in 7(g) dargestellt,
und Namen von elf Flughäfen
innerhalb oder in den Vororten der Stadt Detroit werden aufgeführt. Der
Benutzer wählt
den Namen des Bestimmungsorts (Name des Flughafens) aus. Hier wird "Detroit City Airport" ausgewählt.
-
Wie
vorstehend erläutert
ist, entspricht der Umstand, dass alle Auswahlvorgänge im Bereich
von dem des Anfangsbuchstabens eines Staates zu dem des Namens des
Bestimmungsorts aufeinanderfolgend von dem Server 102 übertragen
werden, der "Übertragungsvorrichtung
für Bestimmungsort-Einstellinformationen".
-
Durch
die vorstehend erläuterten
Kommunikationen zwischen dem mobilen Endgerät 100 und dem Server 102 wird
der Bestimmungsort als "Detroit
City Airport" bestimmt.
Dieser "Name des
Bestimmungsorts" entspricht
den im Anspruch 2 definierten "Bestimmungsortinformationen". Wenn der Bestimmungsort
bestimmt ist, wird das auf dem Monitor 201 dargestellte
Bild zu dem in 7(h) gezeigten geändert, und
danach wird der Benutzer aufgefordert, entweder die Berechnung des
Abstands zwischen dem Startpunkt und dem Bestimmungsort, das Einstellen
weiterer Bestimmungsorte oder das Löschen des so bestimmten Bestimmungsorts auszuwählen. Bei
dem in 7(h) gezeigten, auf dem Monitor
dargestellten Bild kann durch Herunterdrücken der Pfeile (→, ←) in der
Operationstaste 202 der Cursor zu dem Punkt der in derselben
Figur gezeigten Markierung 203 verschoben werden. Diese
Markierung 203 zeigt das Zurückgehen zu dem vorhergehenden
Bild an.
-
Wenn
der Mittelbereich der Operationstaste 202 (der durch ☐ angezeigte
Bereich) heruntergedrückt wird, wobei
der Cursor sich auf "Löschen enroute" befindet, kann der
durch die vorstehend durchgeführten Operationen
erhaltenen Bestimmungsort gelöscht
werden, und das dargestellte Bild geht zu dem in 7(a) gezeigten
zurück.
-
Wenn
der Mittelbereich der Operationstaste 202 (der durch ☐ angezeigte
Bereich) heruntergedrückt wird,
während
sich der Cursor auf "Füge nächsten Bestimmungsort
hinzu" befindet,
geht das dargestellte Bild zu dem in 7(b) gezeigten
zurück,
so dass der zweite Bestimmungsort durch dasselbe Verfahren wie vorstehend
erläutert
eingestellt werden kann.
-
Wenn
der Mittelbereich der Operationstaste 202 (der durch ☐ angezeigte
Bereich) heruntergedrückt wird,
wobei der Cursor sich auf "Ja" befindet, geht der
Vorgang zum Schritt ST603 weiter. In diesem Schritt ST603 speichert
zuerst der Mikrocomputer 402 des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ mehrere durch die vorbeschriebenen Operationen
und/oder Kommunikationen bestimmten Bestimmungsorte in dem Speicher 403,
und danach fordert der Mikrocomputer 402 eine Übertragung
der Ortsinformationen von der Ortsberechnungsschaltung 303 des
tragbaren Telefons 210 an. Die Ortsberechnungsschaltung 303 empfängt die
gesamten Zeitsignale von dem GPS-Satelliten, wenn sie in Betrieb
ist, und wenn sie Signale von dem GPS-Satelliten empfängt, zieht
sie ihre eigene Position als den Wert des Breiten- und des Längengrads hiervon
heraus. Die Ortsberechnungsschaltung 303 überträgt die letzten
Ortsinformationen aus allen bereits herausgezogenen Ortsinformationen
als Antwort auf die Anforderung von dem vorgenannten Mikrocomputer 402.
Diese "Ortsinformationen" entsprechen den "Ortsinformationen
von sich selbst",
die im Anspruch 2 definiert sind.
-
Der
Mikrocomputer 402, der die Ortsinformationen empfangen
hat, überträgt die so
empfangenen Ortsinformationen und den/die vorgenannten einen oder
mehreren Bestimmungsortnamen (Detroit City Airport, Detroit, Michigan)
zu dem Server 102. Diese Übertragung der Ortsinformationen
und der bestimmten Bestimmungsortnamen, die von dem Mikrocomputer 402 durchgeführt wird,
entspricht der in Anspruch 2 definierten Übertragungsvorrichtung".
-
Danach
geht der Vorgang zum Schritt ST604 weiter, und der Server 102,
der die Ortsinformationen und die Bestimmungsortnamen von dem Mikrocomputer 402 empfangen
hat, bestimmt, ob die Orte von diesen innerhalb des Straßennetzwerks
sind oder nicht, wobei er auf die Kartendatenbank 105 Bezug
nimmt. Weiterhin zieht der Server 102 eine optimale Route
aus dem Straßennetzwerk
heraus, die diese beiden Punkte verbindet. Da viele Extraktionsverfahren
für die
optimale Route bereits vorgeschlagen wurden, wird die detaillierte Erläuterung
hiervon hier weggelassen. Es ist zu beachten, dass diese "optimale Route" und ihr Extraktionsverfahren
der "empfehlbaren
Fahrtroute" und
der "Routenextraktionsvorrichtung" entsprechen. 8 zeigt
ein Beispiel der Karte der herausgezogenen Route.
-
Der
Server 102 überträgt eine
herausgezogene optimale Route zusammen mit dem Namen der Straße zu dem
mobilen Endgerät 101.
Die Übertragung
dieser Route von dem Server 102 zu dem mobilen Endgerät 101 entspricht
der "Übertragungsvorrichtung". Ein Beispiel des
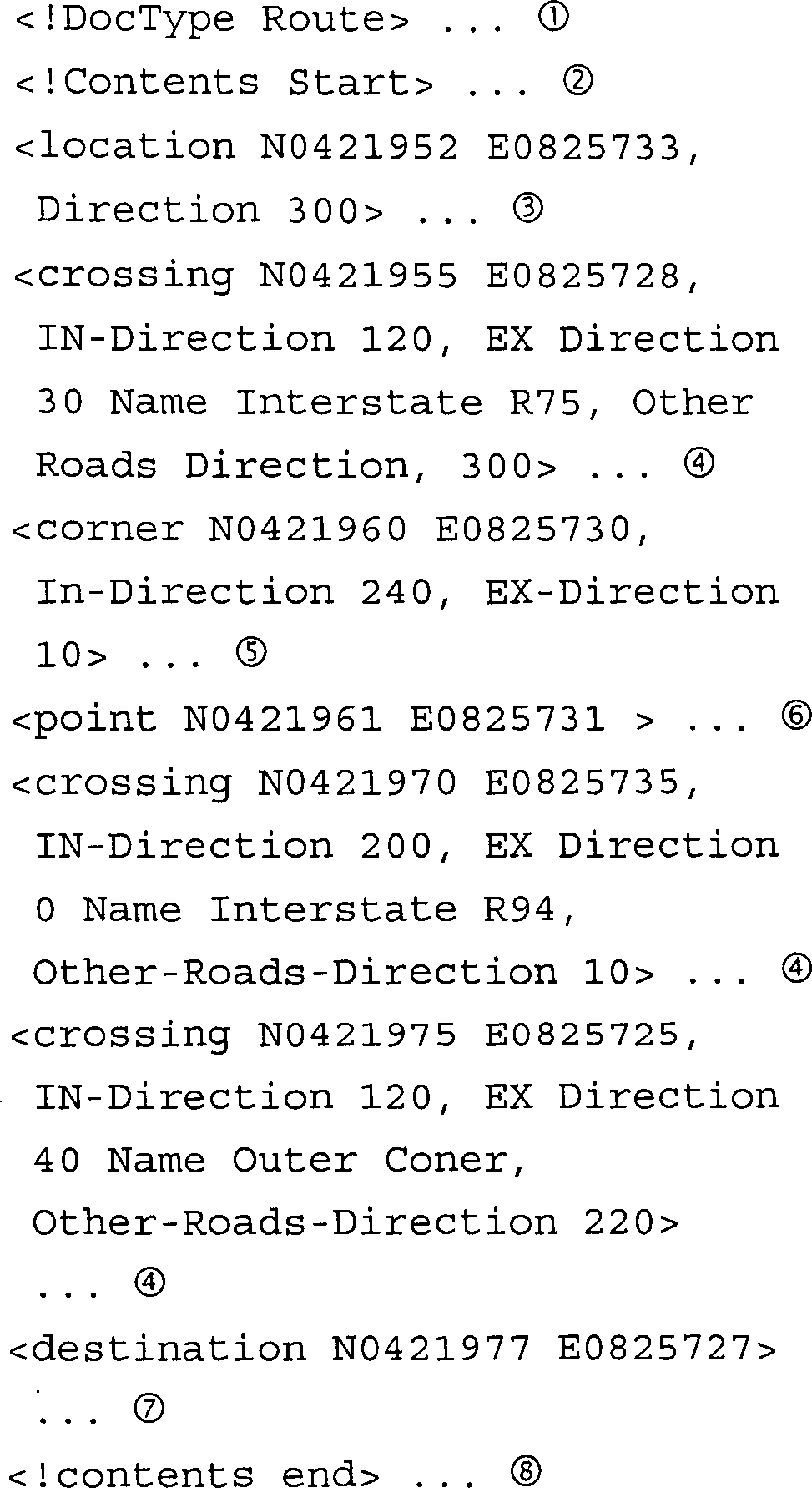
Signalmodus des von dem Server 102 zu dem mobilen Endge rät 101 übertragenen Übertragungssignals
ist nachfolgend gezeigt.
-
-
In
dem vorstehenden Signalmodus erklärt die Zahl ➀, dass
sich die folgende Beschreibung auf eine Route bezieht. Die Zahl ➁ zeigt
an, dass die Routendaten hier starten und aufeinanderfolgend beschrieben sind.
Die Zahl ➂ zeigt den gegenwärtigen Ort und die Richtung
an, die der Benutzer nehmen sollte. Die Zahl ➃ zeigt den
Ort einer Kreuzung, den Eintrittswinkel in die und den Austrittswinkel
aus der Kreuzung, den Straßennamen,
den Winkel anderer Straßen
mit Bezug auf die Kreuzung an. Die Zahl ➄ zeigt den Ort
eines Punkts an, der gekrümmt,
aber keine Kreuzung ist, und den Eintritts- sowie den Austrittswinkel.
Die Zahl zeigt einen Punkt auf der Straße an. Die Zahl ➆ zeigt
den Ort des Bestimmungsorts des Benutzers an. Es ist zu beachten, dass
in dem Fall, in welchem mehrere Bestimmungsorte vorliegen, ➃ bis ➆ nach
der Beschreibung von ➆ weiter beschrieben werden. Die Zahl ➇ zeigt
an, dass die Beschreibung der Routendaten beendet ist. Hier wird der
Ort durch den nördlichen
Breitengrad und den östlichen
Längengrad
angezeigt, und Winkel werden in der Richtung entgegen dem Uhrzeigersinn
beginnend vom Norden als "0" Grad gemessen. Mit
anderen Worten, durch Fahren entlang der Route, wie von ➂ bis ➆ angezeigt
ist, kann der Benutzer seinen Bestimmungsort erreichen.
-
Es
ist zu beachten, dass das "übertragene
Signal" in diesem
Signalmodus den in jedem Anspruch definierten "ersten Informationen" entspricht. Es ist auch zu beachten,
dass in dem hier gezeigten Beispiel die aus der vorbeschriebenen
Erläuterung
des Bestimmungsorts und der Ortsinformationen herausgezogene Route
nicht gezeigt ist.
-
Danach
geht der Vorgang zum Schritt ST605 weiter, in welchem die von dem
Server 102 wie vorstehend gezeigt gesendeten Routendaten über das
Telefonnetzwerk 104 und das Mobiltelefon-Netzwerk 103 von dem
tragbaren Telefon 210 empfangen werden. In dem tragbaren
Telefon 210 werden die vorgenannten Routendaten über die
Antenne 304 empfangen und über die Hochfrequenzschaltung 305 des
tragbaren Telefons, die Signalverarbeitungsschaltung 306 des
tragbaren Telefons, die I/F-Schaltung 311 und
den I/F-Verbinder 312 zu dem Infor mationsendgerät 200 vom
am Fahrzeug befestigten Typ übertragen.
In dem Informationsendgerät 200 vom
am Fahrzeug befestigten Typ werden diese Routendaten von dem Mikrocomputer 402 empfangen und
in dem Speicher 403 gespeichert. Auf diese Weise entspricht
der Vorgang vom Empfang der "Routendaten" durch die Antenne 304 bis
zu deren Speicherung in dem Speicher 403 der "Empfangsvorrichtung" in jedem Anspruch,
und insbesondere entspricht der Vorgang des Speicherns der "Routendaten" im Speicher 403 der
im Anspruch 1 definierten "Speichervorrichtung".
-
Als
Nächstes
erfasst im Schritt ST606 der Mikrocomputer 402 seinen gegenwärtigen Ort
nach demselben Verfahren wie dem im Schritt ST603. Normalerweise
sind, da die Vorgänge
vom Schritt ST603 bis zum Schritt ST606 sehr schnell durchgeführt werden,
die von dem mobilen Endgerät 101 im
Schritt ST603 übertragenen
Informationen über
den gegenwärtigen
Ort und die Informationen über
den gegenwärtigen
Ort in der Anfangsstufe des Schrittes ST606 nicht sehr verschieden
voneinander. Mit anderen Worten, der gegenwärtige Ort stimmt im Wesentlichen
mit der durch ➂ der vorgenannten Routendaten angezeigten
Position überein.
-
In
dem nächsten
Schritt ST607 wird die Abweichung zwischen dem gegenwärtigen Ort
und der Linie, die gebildet wird durch aufeinanderfolgendes Verbinden
jedes der durch die Routendaten angezeigten Punkte (Führungsroute),
ausgewertet. Diese Auswertung der Abweichung entspricht der in jedem
Anspruch definierten "Vergleichsvorrichtung". In dem Fall, in
welchem beispielsweise eine Abweichung von mehr als 100 Metern (nachfolgend
als "100 m" bezeichnet) besteht,
wird beurteilt, dass das mobile Endgerät 101 von der herausgezogenen
Route abweicht, und der Vorgang geht zum Schritt ST603 zurück, während in
dem Fall, in welchem die Abweichung weniger als 100 m beträgt, dann
beurteilt wird, dass sich das mobile Endgerät 101 auf der herausgezogenen
Route befindet, und das Verfahren schreitet dann zum Schritt ST608
weiter. In diesem Moment kann beurteilt werden, dass es auf der
Route ist, so dass der Vorgang zum Schritt ST608 fortschreitet.
-
Im
Schritt ST608 wird bestimmt, ob der Benutzer sich dem in den Routendaten
beschriebenen Punkt nähert.
Diese Bestimmung wird durchgeführt
in Abhängigkeit
davon, ob der Abstand zwischen dem in ➂ der Routendaten
beschriebenen gegenwärtigen
Ort und dem unmittelbar nach ➂ der Routendaten beschriebenen Ort
innerhalb 300 m ist, für
den Fall, dass 300 m der Beurteilungsschwellenwert ist. Wenn der
Abstand von dem gegenwärtigen
Ort zu dem Punkt, der nach ➂ der Routendaten beschrieben
ist, mehr als 300 m beträgt, besteht
keine Notwendigkeit, spezifische Informationen wie eine Kreuzung
oder dergleichen vorzusehen, so dass der Benutzer angewiesen wird,
entlang der gegenwärtigen
Route anhand des wie in 7(i) gezeigten, dargestellten
Bildes zu fahren. Der Vorgang kehrt zum Schritt ST606 zurück, nachdem
das in 7(i) gezeigte Bild dargestellt
ist.
-
Es
wird nun angenommen, dass der Benutzer eine Weile entlang der gegenwärtigen Route
fährt und zu
dem Punkt innerhalb 300 m von dem unmittelbar nach ➂ beschriebenen
Punkt gelangt ist. In diesem Fall wird er zuerst im Schritt ST608
erfasst. Wenn erfasst wird, dass der Benutzer zu dem Punkt innerhalb
300 m von dem unmittelbar nach ➂ im Kreis beschriebenen
Punkt gekommen ist, geht der Vorgang vom Schritt ST608 zum Schritt
ST609 weiter. Im Schritt ST609 wird ein Bild wie in 7(j) gezeigt
auf dem Monitor 201 dargestellt, um den Benutzer anzuweisen,
wie er über
die Kreuzung fahren sollte und wie die Straße, zu der der Benutzer nicht
weiter fahren sollte, zu der Kreuzung bezogen ist und so weiter,
gemäß dem beschriebenen Inhalt
der Routendaten. Es ist zu beachten, dass diese "Bilddarstellung" der in jedem Anspruch definierten "Anzeigevorrichtung" entspricht. Der
Benutzer erkennt seine Route mit Bezug auf dieses dargestellte Bild.
In diesem Bespiel erkennt der Benutzer, dass er nach rechts abbiegen
sollte. Danach geht der Vorgang zurück zum Schritt ST606, und die
Vorgänge
vom Schritt ST606 zum Schritt ST608 oder die Vorgänge vom
Schritt ST606 bis zum Schritt ST609 werden wiederholt durchgeführt. Aufgrund
dessen erhält
der Benutzer eine zweckmäßige Routenführung.
-
Wenn
der Benutzer durch die vorbeschriebenen Vorgänge seinen Bestimmungsort erreicht,
wird der Name des entsprechenden Bestimmungsorts gelöscht. Wenn
mehrere Bestimmungsorte in dem Speicher 403 gespeichert
sind und in dieser Stufe ein nächster
Bestimmungsort vorhanden ist, geht der Vorgang zurück zum Schritt
ST606 und wiederholt die Routenführung
zu dem nächsten
Bestimmungsort.
-
Es
wird hier angenommen, dass das mobile Endgerät 101 fälschlicherweise
zu dem durch die in 8 gezeigte Markierung "⌾" angezeigten Punkt gekommen ist, und
im Schritt ST607 wird beurteilt, dass der gegenwärtige Ort mehr als 100 m von
der geführten
Route (nachfolgend als die "Führungsroute" bezeichnet) abgewichen
ist. In diesem Fall bestimmt der Mikrocomputer 402 den
nächsten
Punkt von dem gegenwärtigen
Ort auf der durch eine in 8 gezeigte
ausgezogene Linie angezeigten Führungsroute.
Dann bestimmt der Mikro computer 402 die Richtung zu dem
vorstehend bestimmten Punkt, beobachtet von dem gegenwärtigen Ort, und
stellt ein wie in 7(k) gezeigtes Bild
auf dem Monitor 201 dar, um den Benutzer darüber zu informieren, dass
er von der Führungsroute
abgewichen ist, und zeigt ihm auch die Richtung, in der der nächste Punkt
der Führungsroute
liegt. Die Anzeige dieser Abweichung von der Führungsroute und die Richtung
zu dem nächsten
Punkt der Führungsroute
entsprechen der im Anspruch 3 definierten "Rückkehranzeigevorrichtung". Es ist zu beachten,
dass in 7(k) der Cursor bereits auf "enRoute" as ein Vorgabewert
gesetzt ist. Wenn der mittlere Bereich der Operationstaste 202 (der
durch ☐ angezeigte Bereich) in diesem Zustand gedrückt wird,
geht der Vorgang zum Schritt ST603 zurück.
-
Die
Ortsberechnungsschaltung überträgt die letzte
der bereits herausgezogenen Ortsinformationen als Antwort auf die
Anforderung von dem Mikrocomputer 402. Der Mikrocomputer 402,
der diese Ortsinformation empfangen hat, überträgt die entsprechende Ortsinformation
und den/die vorgenannten einen oder mehr als einen Bestimmungsortnamen
wie (Detroit City Airport, Detroit, Michigan) zu dem Server 102.
Es ist zu beachten, dass die Übertragung
dieser Ortsinformation und der Bestimmungsortnamen zu dem Server 102 der in
jedem Anspruch definierten "Anforderungsvorrichtung
für eine
neue Route" entspricht.
-
Danach
zieht im Schritt ST604 der Server
102, der diese Ortsinformation
und den Bestimmungsortnamen empfangen hat, eine optimale Route aus
den beiden Informationen heraus. Diese "Routeninformation" entspricht der in jedem Anspruch definierten "zweiten Information". Die so herausgezogene
Route wird von dem Server
102 zu dem mobilen Endgerät
101 übertragen.
Mit anderen Worten, der Benutzer kann die Routendaten von dem gegenwärtigen Ort,
der von der durch die Markierung "O" angezeigten
Route abgewichen ist, zu dem vorher eingestellten Ort, der durch
die Markierung "
" angezeigt ist, erhalten,
so dass der Benutzer seinen Ort natürlich zu dem Bestimmungsort
verschieben kann, ohne seine Bewegung anzuhalten.
-
Als
Nächstes
wird der Vorgang der Bestimmung des Bestimmungsorts, der in den
in 6 gezeigten Schritten ST601A bis ST602 durchgeführt wird,
wie folgt erläutert.
Es ist festzustellen, dass 9 ein Flussdiagramm
ist, das die in diesen Schritten ST601A bis ST602 durchgeführten Vorgänge im Einzelnen
zeigt.
-
Wenn "Enroute" auf der in 7(a) dargestellten Monitoranzeige ausgewählt ist,
fordert das mobile Endgerät 101 im
Schritt ST901 eine Übertragung
der Bestimmungsort-Einstelldaten von dem Server 102 an. Der
Server 102, der diese Anforderung empfangen hat, überträgt eine
Liste der Namen der Staaten zu dem mobilen Endgerät 101 und
veranlasst den Benutzer, im Schritt ST902 einen der Namen der Staaten
auszuwählen.
Es wird hier angenommen, dass die Datenmenge weniger als 1 Kbyte
beträgt.
-
Wenn
das mobile Endgerät 101 diese
Anweisung empfängt,
wird der Benutzer veranlasst, im Schritt ST903 den Anfangsbuchstaben
eines Staates unter Verwendung des in 7(b) dargestellten
Bildes auszuwählen.
Danach wird im Schritt ST904 der Benutzer veranlasst, den Namen
des so ausgewählten
Staates durch Verwendung des in 7(c) dargestellten
Bildes auszuwählen,
um einen Staat zu bestimmen, in welchem sein Bestimmungsort liegt.
Da die Bedeutung des dargestell ten Bildes und die von dem Benutzer
vorzunehmende Operation in dieser Stufe bereits vorstehend erläutert wurden,
wird eine detaillierte Beschreibung hierüber hier weggelassen. Der so
bestimmte Name des Staates wird von dem mobilen Endgerät 101 zu
dem Server 102 zurückgesandt.
-
Als
Nächstes überträgt im Schritt
ST905 der Server 102, der den zurückgesandten Namen des Staates empfangen
hat, eine Liste der Namen von Städten
oder Landkreisen innerhalb des so ausgewählten Staates, um die Auswahl
des Namens einer Stadt oder eines Landkreises anzuweisen. Die Menge
dieser Daten kann auf angenähert
1 Kbyte geschätzt
werden. Wenn das mobile Endgerät 101 diese
Daten empfängt,
zeigt es im Schritt ST906 ein Bild wie in 7(d) dargestellt
an, und im Schritt ST907 wird ein Bild wie in 7(e) dargestellt
anzeigt, um den Benutzer zu veranlassen, eine Stadt oder einen Landkreis
zu bestimmen, in der/dem sein Bestimmungsort liegt. Der Name der
so bestimmten Stadt oder des Landkreises wird zu dem Server 102 übertragen.
-
Als
Nächstes überträgt der Server 102 eine
Liste der POI(Punkt des Interesses)-Kategorien zu dem mobilen Endgerät 101,
um den Benutzer zu veranlassen, im Schritt ST908 eine der POI-Kategorien
auszuwählen.
Die Menge dieser Daten kann auf angenähert 100 Bytes abgeleitet werden.
Das mobile Endgerät 101,
das diese Daten empfangen hat, liefert im Schritt ST909 dem Benutzer
eine Liste der so gesandten POI-Kategorien gemäß 7(f),
um ihn zu veranlassen, eine der Kategorien der POI-Kategorien auszuwählen. Die
so ausgewählte
POI-Kategorie wird zu dem Server 102 übertragen.
-
Der
Server, der die POI-Kategorie empfangen hat, überträgt im Schritt ST910 eine Liste
der POI-Namen der ausgewählten
POI-Kategorie, die innerhalb der bestimmten Stadt oder des Landkreises
liegen, um den Benutzer zu veranlassen, einen der POI-Namen auszuwählen. Die
Menge dieser Daten kann auf weniger als 100 Bytes abgeleitet werden.
Das mobile Endgerät 101,
das die Liste empfangen hat, liefert dem Benutzer die so gesandte
Liste der POI-Namen gemäß 7(g), um ihn zu veranlassen, einen der
POI-Namen als seinen Bestimmungsort im Schritt ST911 auszuwählen. Wie
vorstehend erläutert
ist, entspricht die aufeinanderfolgende Übertragung der Auswahlkandidaten
von der Stufe der Auswahl des Anfangsbuchstabens eines Staates bis
zu der Stufe zur Auswahl des POI-Namens der "Übertragungsvorrichtung
der Bestimmungsort-Einstellinfomationen".
-
Der
gemäß dem vorbeschriebenen
Verfahren ausgewählte
POI-Name wird zu dem Server 102 übertragen, und es wird darin
hierauf sowie auf den Namen des ausgewählten Staates und denjenigen
der Stadt oder des Landkreises Bezug genommen, um für die Berechnung
der Route im Schritt ST604 verwendet zu werden.
-
Wie
vorstehend erläutert
ist, besteht bei dem Bestimmungsort-Einstellprozess, da die Speicherkapazität der von
dem Server 102 zu dem mobilen Endgerät 101 übertragenen
Daten nicht mehr als 1 Kbyte beträgt, wenn der Speicher 403 eine
Kapazität
hat, die gerade ausreichend ist, diese zu bewältigen, keine Notwendigkeit,
seine Kapazität
zu erhöhen,
so dass er ohne das Erfordernis einer Erhöhung der Speicherkapazität realisiert
werden kann.
-
Wie
vorstehend erläutert
ist, kann, da die Navigationsfunktion nur durch Kommunikation mit
dem Server 102 bei dem anfänglichen Zustand der Routenführung und
bei dem Zeitablauf, bei dem das mobile Endgerät 101 von der Route
abgewichen ist, erhalten werden kann, die Navigationsfunktion mit
einer minimalen Frequenz von Kommunikationen zwischen dem mobilen
Endgerät 101 und
dem Server 102 durchgeführt
werden, wobei das Endgerät 101 nicht
mit Kartendaten wie einem CD-ROM und so weiter ausgestattet ist.
-
Weiterhin
können,
da der Server 102 auch mehrere Punkte auf dem Wege der
Fahrt des Fahrzeugs gesendet hat, wenn der Server 102 veranlasst
wird, die Route zu berechnen, diese Punkte eingestellt werden, und
da die Richtung zu der nächsten
Führungsroute
angezeigt wird, selbst wenn das Fahrzeug von der Route abgewichen
ist, wird eine Rückkehr
zu der Führungsroute
ermöglicht,
und weiterhin kann, da der Server 102 die Bestimmungsort-Einstelldaten
in einer geschichteten Form enthält,
die zum Einstellen des Bestimmungsorts erforderliche Speicherkapazität klein
gemacht werden, so dass die Größe des Informationsendgeräts 200 vom
am Fahrzeug befestigten Typ insgesamt minimiert werden kann, wobei
dennoch die leichte Handhabbarkeit für den Benutzer erhalten bleibt.
-
[Zweites Vergleichsbeispiel]
-
Als
Nächstes
wird das zweite Vergleichsbeispiel der vorliegenden Erfindung nachfolgend
erläutert.
-
Bei
dem Navigationssystem gemäß dem ersten
Vergleichsbeispiel wird, selbst in dem Fall, in welchem der Ort
des Fahrzeugs selbst von der Führungsroute abgewichen
ist, nicht mehr als die Richtung des Fahrzeugs zur Rückkehr zu
der Führungsroute,
wie in 7(k) gezeigt ist, gezeigt,
und wie der Benutzer zu der Führungsroute
zurückkehren
kann, wird überhaupt
nicht erläutert.
Somit ist, wenn ein Bild gemäß 7(k) in derartigen Fällen angezeigt wird, der Benutzer
gezwungen, "enRoute" auszuwählen. Das
Navigationssystem nach dem zweiten Beispiel bezieht sich auf eine
Verbesserung des Verfahrens zur Bewältigung des Falles, in welchem
der Fahrzeugort von der Führungsroute
abgewichen ist.
-
Hier
ist 10 ein Flussdiagramm, das den Operationsfluss
des Navigationssystems nach diesem zweiten Beispiel zeigt, wobei
die Schritte ST606 bis ST609 gemäß 6 verbessert
wurden. Es ist zu beachten, dass in dieser 10 die
Schritte, die jedem Schritt in 6 entsprechen,
mit denselben Bezugszahlen versehen sind, und die Schritte entsprechend
denjenigen in den Schritten ST601A und ST601B sind zusammengenommen
und als Schritt ST601 definiert.
-
Zuerst
geht in den Schritten ST601 bis ST606, wenn der gegenwärtige Ort
in derselben Weise wie der bei dem ersten Beispiel erfasst wird,
der Vorgang zum Schritt ST1001 weiter. In diesem Schritt ST1001
wird beurteilt, ob der gegenwärtige
Ort um mehr als 1 m von dem vorhergehenden Zeitpunkt, an dem der
gegenwärtige
Ort gespeichert wurde, verschoben ist, und wenn beurteilt wird,
dass er um mehr als 1 Meter verschoben ist, verzweigt sich der Vorgang
zum Schritt ST1002, und wenn dies nicht der Fall ist, geht der Vorgang
zum Schritt ST1003 weiter. Im Schritt ST1002 geht, nachdem der Mikrocomputer 402 den
gegenwärtigen
Ort gespeichert hat, der Vorgang zum Schritt ST1003 weiter. Im Schritt
ST1003 wird erfasst, ob die durch die Ausführung des Schritts ST1002 gespeicherten
Ortsinformationen mehr als 500 sind.
-
Als
eine Folge wird, wenn die gespeicherten Ortsinformationen mehr als
500 sind, der Vorgang zum Schritt ST1004 verzweigt, während, wenn
sie weniger als 500 sind, der Vorgang zum Schritt ST607 weitergeht. Im
Schritt ST1004 werden die ältesten
Daten gelöscht,
und die Anzahl von gespeicherten Ortsinformationen wird auf 500
begrenzt, und danach geht der Vorgang zum Schritt ST607 weiter.
Im Schritt ST607 wird nicht nur die Abweichung von der Route erfasst,
sondern es werden auch Vermutungen über die Position, an der die Abweichung
von der Route stattgefunden hat, angestellt, wie in dem Fall des
ersten Beispiels. Es ist zu beachten, dass die Vermutung über den
abgewichenen Punkt durchgeführt
wird durch Zurückverfolgen
der gespeicherten Ortsinformationen um 100 Meter von dem Ort, an
dem die Abweichung beurteilt wurde.
-
Als
ein Ergebnis der Beurteilung wird in dem Fall, in welchem die Abweichung
von der Route erfasst wurde, ein Bild wie in 11(a) gezeigt
im Schritt ST1005 angezeigt, und der Benutzer wird angewiesen, auf derselben
Route, auf der er gekommen ist, zurückzugehen. Danach wird im Schritt
ST1006 beurteilt, ob der mittlere Bereich der Operationstaste 202 (der
durch ☐ angezeigte Bereich) gedrückt wurde, um "enRoute" wirksam zu machen,
und wenn beurteilt wird, dass er gedrückt wurde, geht der Vorgang
zum Schritt ST603 zurück, während, wenn
beurteilt wird, dass er nicht gedrückt wurde, der Vorgang zum
Schritt ST1005 im Wege der Schritte ST608, ST606, ST1001, ST1002,
ST1003, ST1004 und ST607 geht.
-
Hier
zeigt 12 einen imaginären Kreis 1201 mit
einem Durchmesser von beispielsweise 50 m mit dem gegenwärtigen Ort 9 als
Mittelpunkt. In diesem Zustand kann in dem Fall, in welchem zwei
Gruppen aus den Ortsinformationen ➀ bis ➈, nämlich die
Gruppe bestehend aus den Ortsinformationen ➀ bis ➃ und
die andere Gruppe bestehend aus den Ortsinformationen ➇ und ➈,
in dem Kreis 1201 enthalten sind, während eine andere Gruppe zwischen
diesen beiden Gruppen, nämlich
die Gruppe bestehend aus ➄ bis ➆ von diesem Kreis 1201 ausgeschlossen
ist, beurteilt werden, dass das Fahrzeug auf derselben Route in
der entgegengesetzten Richtung durch eine U-Umkehrung oder dergleichen
zurückfährt.
-
Danach
wird die Richtung, die durch einen Vektor angezeigt wird, der die
Ortsinformationen, enthalten in der älteren Gruppe von Informationen
(➀ bis ➃) und anzeigend die nächste Position ➂ zu
der gegenwärtigen Position,
und die Ortsinformationen, die die Position ➁ anzeigen,
die einen Schritt älter
als diese Position 30 ist, verbindet, wie in 11(b) gezeigt angezeigt. Die dargestellte
Richtung zeigt die Richtung der Route an, die zu dem vorgenannten
vermuteten abgewichenen Punkt gerichtet ist. Es ist zu beachten,
dass die Anzeige der Rückkehrrichtung
zu der Führungsroute
der im Anspruch 3 definierten "Rückkehr-Anzeigevorrichtung" entspricht.
-
Die
vorstehende Erläuterung
wurde für
den Fall gegeben, dass die Anzahl von zu speichernden Ortsinformationen
auf 500 begrenzt ist. Jedoch ist es besser, eine größere Anzahl
innerhalb der zulässigen
Grenze der Kapazität
des Speichers 403 zu haben, da die Rückkehrroute selbst dann angezeigt
werden kann, wenn der Benutzer zu stark abgewichen ist, wodurch
die einfache Handhabbarkeit für
den Benutzer erhöht
wird. Weiterhin ist selbstverständlich,
dass in dem Fall, in welchem ein wie in 11(b) gezeigtes
Bild gestartet wird, die einfache Handhabbarkeit für den Benutzer
erhöht
wird, wenn die gespeicherten Ortsinformationen vorgesehen sind.
-
Wie
vorstehend erläutert
ist, ist die Ausbildung des zweiten Beispiels der vorliegenden Erfindung
derart, dass, wenn der Ort des Fahrzeugs von der Führungsroute
abweicht, der Benutzer so geführt
wird, dass er in der entgegengesetzten Richtung nach der Abweichung
fährt,
so dass selbst dann, wenn der Benutzer von der Führungsroute abgewichen ist,
er zurück
zu der Führungsroute
ohne Anforderung einer neuen Routenerfassung gehen kann. Somit kann
die Häufigkeit
der Kommunikationen weiter verringert werden.
-
[Erstes Ausführungsbeispiel]
-
Das
Navigationssystem gemäß einem
ersten Ausführungsbeispiel
der vorliegenden Erfindung wird nun wie nachfolgend erläutert.
-
Das
Navigationssystem gemäß diesem
ersten Ausführungsbeispiel
ist dasjenige zur Bewältigung
des Falles, in welchem die Menge der von dem Server 102 im
Schritt ST605 des ersten Beispiels übertragenen Routendaten die
Kapazität
des in dem Informationsendgerät 100 vorgesehenen
Speichers 403 überschreitet.
-
Hier
ist 13 ein Flussdiagramm, das die Arbeitsweise des
Navigationssystems gemäß einem
ersten Ausführungsbeispiel
der vorliegenden Erfindung zeigt. Es ist in dieser Figur zu beachten,
dass die Schritte entsprechend jedem in 6 gezeigten
Schritt mit denselben Zahlen versehen sind, wobei die Schritte entsprechend
den Schritten ST601A und ST601B zu dem Schritt ST601 zusammengefasst
sind und der Schritt ST604 in 4 Schritt geteilt ist, nämlich die
Schritte ST604A, ST604B, ST604C und ST604D.
-
Wenn
der Bestimmungsort in den Schritten ST601 und ST602 durch dasselbe
Verfahren wie dasjenige bei dem ersten Beispiel bestimmt ist, geht
der Vorgang zum Schritt ST603 weiter. In diesem Schritt ST603 werden
die Informationen über
den gegenwärtigen
Ort, die Punkte, entlang denen das Fahrzeug fährt, und der Name des Bestimmungsorts
bei dem ersten Beispiel zu dem Server 102 übertragen.
Jedoch wird bei diesem ersten Ausführungsbeispiel die Kapazität des Speichers 403,
der zum Speichern von Daten verwendet werden kann, zusätzlich zu
den vorgenannten Daten ebenfalls zu dem Server 102 übertragen.
Mit anderen Worten, die Kapazität
des zum Speichern von Daten verwendbaren Speichers 403 wird
dem Server 102 mitgeteilt als die Datenmenge MDL, die von
dem Server 102 zu übertragen
gewünscht
wird. Hier wird diese Datenmenge MDL als 100 Kbytes angenommen.
Es ist zu beachten, dass die Mitteilung der Datenmenge, die zu dem
Server 102 zu übertragen
gewünscht
wird, der im Anspruch 5 definierten "Datenmengen-Mitteilungsvorrichtung" entspricht.
-
Der
Server 102 empfängt
eine Anforderung zur Übertragung
der Bestimmungsort-Einstelldaten von dem mobilen Endgerät 101 und
der Datenmenge MDL. Es ist zu beachten, dass der Empfang dieser
Datenmenge MDL der "Bedingungsempfangsvorrichtung" entspricht.
-
Als
Nächstes
führt der
Server 102 im Schritt ST604A die Routenberechnung wie bei
dem ersten Beispiel durch. Es ist zu beachten, dass diese Berechnung
der Route der "Verarbeitungsvorrichtung" entspricht. Danach
wird im Schritt ST604B die Datenmenge der herausgezogenen empfehlbaren
Fahrtroute RDL mit der im Schritt ST603 mitgeteilten Datenmenge
MDL verglichen. Als eine Folge geht, wenn die herausgezogene Datenmenge
RDL gleich 80 Kbytes ist, die kleiner als die mitgeteilte Datenmenge
MDL von 100 Kbytes ist, der Vorgang zum Schritt ST605 weiter.
-
Wenn
andererseits die herausgezogene Datenmenge RDL 150 Kbytes beträgt, welche
größer als
die mitgeteilte Datenmenge MDL von 100 Kbytes ist, dann geht der
Vorgang zum Schritt ST604C weiter, und er schneidet die Routendaten
bei etwa den 99-ten Kbytes von dem Startpunkt der Routendaten aus
ab, so dass die Datenmenge MDL geringer als 100 Kbytes wird. Dieses
Abschneiden der Routendaten, um die Datenmenge MDL kleiner als 100
Kbytes zu machen, entspricht der "Datenmengen-Begrenzungsvorrichtung". Hier werden in
dem Fall, in welchem die Routendaten abgeschnitten werden, die Daten,
welche anzeigen, dass noch andere Daten folgen, hinzugefügt. Diese
Hinzufügung
von Daten, die anzeigen, dass danach eine Fortsetzung von Daten
stattfindet, entspricht der "Hinzufügungsvorrichtung
für fortgesetzte
Informationen".
Im Folgenden wird ein Beispiel für
einen Signalmodus nahe dem Ende der von dem Server 102 übertragenen
Routendaten gezeigt.
-
-
-
Es
ist festzustellen, dass in dem hier gezeigten Signalmodus die herausgezogenen
Routendaten vor ➈ abgeschnitten werden und es mitgeteilt
wird, dass nach ➈ weitere Daten fortgesetzt werden.
-
Danach
werden im Schritt ST604D die Routendaten so abgeschnitten, dass
die Datenmenge geringer als die Datenmenge MDL wird, und die Routendaten,
zu denen die Daten 9, die anzeigen, dass weitere Daten vorhanden
sind, die danach fortgesetzt werden, hinzugefügt sind, werden zu dem mobilen
Endgerät 101 übertragen,
und danach geht der Vorgang zum Schritt ST605 weiter. Im Schritt
ST605 werden die vorgenannten, von dem Server 102 übertragenen
Daten wie in dem Fall des ersten Beispiels von dem mobilen Endgerät 101 empfangen.
-
Als
Nächstes
wird im Schritt ST1301 die später
erläuterte
gültige
Datenmenge innerhalb des Speichers 403 bestimmt. Jedoch
wird angenommen, dass in dieser Stufe die restliche Menge von Routendaten noch
reichlich ist. In diesem Fall kann wie in dem Fall des ersten Beispiels
der Benutzer durch aufeinanderfolgendes Ausführen der in 7 gezeigten
Bildanzeigen geführt
werden.
-
Es
wird hier angenommen, dass der Benutzer entsprechend der Führung fährt und
sich dem Punkt direkt vor 300 m vor dem durch ➃-2 angezeigten
Punkt genähert
hat. In dieser Stufe wurden nur die vorstehenden Routendaten ➃-2, ➈ und ➇ in
dem Speicher 403 als gültige
Routendaten gespeichert, während
andere Routendaten nicht erforderlich sind. Der Mikrocomputer 402 bestimmt
die Menge der gültigen
Daten innerhalb des Speichers 403 im Schritt ST1301, und
diese Bestimmung der Menge von gültigen
Daten entspricht der im Anspruch 1 definierten "Speicherüberwachungsvorrichtung".
-
Als
ein Ergebnis der Bestimmung wird in dem Fall, in welchem sehr wenige
gültige
Daten in dem Speicher 403 verblieben sind, der Vorgang
zum Schritt ST1302 abgezweigt, während
er anderenfalls zum Schritt ST606 geht. Im Schritt ST1302 beurteilt
der Mikrocomputer 402, ob Daten ➈ nahe dem Endbereich
der Routendaten vorhanden sind. Wenn als ein Ergebnis beurteilt
wird, dass Daten ➈ vorhanden sind, setzt der Mikrocomputer 402 den
Vorgang zurück
zum Schritt ST603 und versucht, die Routendaten von dem gegenwärtigen Ort
bis zum Bestimmungsort von dem Server 102 zu erhalten.
Es ist festzustellen, dass das Erhalten der Routendaten von dem
Server 102 der im Anspruch 1 definierten "Anforderungsvorrichtung
für fortgesetzte
Daten" entspricht.
Wenn andererseits beurteilt wird, dass keine entsprechenden Daten
verblieben sind, geht der Vorgang zum Schritt ST606 weiter.
-
Danach
werden in den Schritten ST606 bis ST609 dieselben Vorgänge wie
diejenigen bei dem ersten Beispiel durchgeführt.
-
Wie
vorstehend erläutert
ist, werden gemäß diesem
ersten Ausführungsbeispiel,
bei dem die Datenmenge vorbereitend dem Server 102 mitgeteilt
wird, für
den Fall, dass die im Schritt ST102 herausgezogene Menge der Routendaten
größer als
die Kapazität
des Speichers 403 ist, die Routendaten dann getrennt übertragen,
so dass ein Überlauf
des Speichers 403 automatisch verhindert werden kann, und
somit kann der Benutzer zu dem Bestimmungsort geleitet werden, ohne
dass diesem irgendeine Unbequemlichkeit verursacht wird.
-
[Zweites Ausführungsbeispiel]
-
Als
Nächstes
wird das zweite Ausführungsbeispiel
der vorliegenden Erfindung wie nachfolgend erläutert.
-
Das
Navigationssystem nach diesem zweiten Ausführungsbeispiel bezieht sich
auch auf das Verfahren zum Bewältigen
des Falles, in welchem die Menge der von dem Server 102 gesendeten
Routendaten die Kapazität
des in dem Informationsendgerät 200 vorgesehenen
Speichers 403 im Schritt ST605 des ersten Ausführungsbeispiels überschreitet.
Jedoch ist das Verfahren zur Vermeidung dieses Problems gegenüber dem
des ersten Ausführungsbeispiels
unterschiedlich.
-
Hier
ist 14 ein Flussdiagramm, das die Arbeitsweise des
Navigationssystems nach diesem zweiten Ausführungsbeispiel zeigt. Es ist
zu beachten, dass in dieser 14 die
Schritte entsprechend jedem Schritt in 13 mit
denselben Bezugszahlen versehen sind und die Schritte ST604B bis
ST604A durch den Schritt ST604 ersetzt werden.
-
Das
Verfahren schreitet wie bei dem ersten Beispiel fort, und der Server 102 führt eine
Routenberechnung durch und zieht eine empfehlbare Fahrtroute im Schritt
ST604A heraus. Dann beginnt im Schritt ST604E die Übertragung
der Routendaten zu dem mobilen Endgerät 101. Der Mikrocomputer 402 des
mobilen Endgeräts 101 beginnt
mit dem Empfang der Routendaten im Schritt ST605 und speichert aufeinanderfolgend
die so empfangenen Daten in dem Speicher 403.
-
Danach überwacht
im Schritt ST1401 der Mikrocomputer 402 die Belegungsrate
des Speichers 403 während
des Speichervorgangs der empfangenen Routendaten, und wenn nicht
viel Kapazität
im Speicher 403 verblieben ist, wird der Vorgang zum Schritt
ST1402 verzweigt. Wenn andererseits der Empfang der Routendaten
beendet ist, selbst wenn mehr Kapazität verblieben ist, geht der
Vorgang direkt zum Schritt ST1301 weiter.
-
Im
Schritt ST1402 fordert das mobile Endgerät 101 den Server 102 zur
Unterbrechung der Routendatenübertragung
auf und stoppt gleichzeitig das Schreiben der Routendaten in den
Speicher 403. Es ist zu beachten, dass diese Anforderung
zur Unterbrechung der Routendaten der "Unterbrechungsanforderungsvorrichtung" im Anspruch 6 entspricht.
Als Nächstes
fügt im
Schritt ST1403 der Mikrocomputer die Daten ➈, die anzeigen,
dass eine Fortsetzung von Daten vorliegt, und die Daten 8,
die anzeigen, dass die Beschreibung der Routendaten beendet ist,
zu dem Endbereich der in dem Speicher 403 gespeicherten
Routendaten hinzu, und danach geht der Vorgang zum Schritt ST1301.
-
Es
ist zu beachten, dass der nach dem Schritt ST1301 durchgeführte Vorgang
derselbe wie bei dem ersten Ausführungsbeispiel
ist, so dass die detaillierte Erläuterung hiervon hier weggelassen
wird.
-
Wie
vorstehend erläutert
ist, kann selbst bei diesem zweiten Ausführungsbeispiel ein Überlauf
des Speichers 403 automatisch verhindert werden durch Überwachen
der Belegungsrate von diesem und durch Unterbrechen des Schreibvorgangs
in den Speicher 403, bevor der Speicher gesättigt ist,
so dass der Bestimmungsort geführt
werden kann, ohne dass dem Benutzer irgendeine Unbequemlichkeit
verursacht wird.
-
[Drittes Vergleichsbeispiel]
-
Es
ist zu beachten, dass das erste und das zweite Beispiel hinsichtlich
des Falles erläutert
wurden, dass der Bestimmungsort und die Punkte auf dem Fahrtweg
des Fahrzeugs in dem Mikrocomputer 402 gespeichert werden.
Jedoch können
diese Informationsstücke
auf der Seite des Servers 102 gespeichert werden, und es
kann leicht abgeleitet werden, dass dieselben Wirkungen wie die
bei jedem der vorstehenden Ausführungsbeispiele
erhaltenen erhalten werden können.
In diesem Fall kann eine Wirkung der Verringerung der Belastung
des Mikrocomputers 402 ebenfalls erhalten werden.
-
[Viertes Vergleichsbeispiel]
-
Weiterhin
wurde das erste Beispiel hinsichtlich des Falles erläutert, dass
ein sogenanntes Reihenfolgeverfahren zum Darstellen von Bildern
wie in 7(j) und 7(k) gezeigt
als das Verfahren zum Bereitstellen der Navigationsfunktion für Benutzer
verwendet wird. Jedoch ist in dem Fall, in welchem der Mikrocomputer 402 eine
Funktion der Sprachsynthese und so weiter hat, eine Routenführung für den Benutzer
durch eine menschliche Sprache ebenfalls möglich.
-
[Fünftes
Vergleichsbeispiel]
-
Weiterhin
wurde in dem ersten Beispiel der Fall erläutert, dass ein sogenanntes
Reihenfolgeverfahren zur Darstellung von Bildern wie in 7(j) und 7(k) gezeigt
als das Verfahren zum Bereitstellen einer Navigationsfunktion für Benutzer
erläutert
ist. Jedoch ist in dem Fall, in welchem die obere Grenze der Kommunikationsgeschwindigkeit
des Mobiltelefon-Netzwerks 103 oder dergleichen hoch ist,
der Mikrocomputer 402 mit einem Speicher 403 mit
erheblicher Speicherkapazität
ausgestattet, und wo der Monitor 201 ein TV-Bild anzeigen kann,
können
Daten enthaltend die Straßen
um die Führungsroute
herum ebenfalls von dem Server 102 zu dem Benutzer übertragen
werden, und selbst eine Karte kann für den Benutzer bereitgestellt
werden.
-
[Sechstes Vergleichsbeispiel]
-
Weiterhin
wurde das erste Beispiel für
den Fall erläutert,
dass ein verfahren der aufeinanderfolgenden Auswahl als das Bestimmungsort-Einstellverfahren
zum Auswählen
des Bestimmungsorts verwendet wird. Jedoch ist es weit verbreitet,
ebenso einen Bestimmungsort durch Telefonnummern zu bestimmen. Mit
anderen Worten, der Benutzer kann seinen Bestimmungsort nicht nur
durch das in dem erste Ausführungsbeispiel
erläuterte
Verfahren zur aufeinanderfolgenden Auswahl auswählen, sondern kann die Auswahl
auch durch Eingabe einer Telefonnummer oder dergleichen vereinfachen.
In diesem Fall können
alle Vorgänge
zum Einstellen des Bestimmungsorts wie im Schritt ST601A angezeigt,
bei dem eine Anforderung zur Übertragung
der Bestimmungsort-Einstelldaten zu dem Server 102 und
der nachfolgende Empfang der so von dem Server 102 übertragenen
Daten entsprechend dem in den 7(b) bis 7(g) dargestellten Bild erfolgen, vermieden
werden.
-
Gewerbliche Anwendbarkeit
-
Wie
vorstehend erläutert
ist, implementiert das Navigationssystem gemäß der vorliegenden Erfindung ein
Navigationssystem, das für
seinen mobilen Gebrauch geeigneter ist, das einen CD-ROM zum Speichern einer
Kartendatenbank, die auf der Seite des mobilen Endgeräts zur Realisierung
der Navigationsfunktion erforderlich war, vermeiden kann oder zumindest
einen Mechanismus zum Wiedergeben des CD-ROM weglassen kann, wodurch
das mobile Endgerät
eine geringe Größe erhält und der
Verbrauch elektrischer Leistung herabgesetzt wird. Weiterhin kann
sie das Navigationssystem vom ziemlich bequemen Nachfragetyp implementieren,
das in der Lage ist, die Navigationsfunktion mit minimaler Kommunikationsfrequenz
und minimaler Speicherkapazität
zu realisieren, bei der die Kommunikationen zwischen dem mobilen
Endgerät
und dem Server nur auf den Anfangszustand der Routenführung und
den Zeitpunkt des Auftretens einer Abweichung von der Route begrenzt
werden, wodurch die Kommunikationsgebühren verringert und der Leistungsverbrauch
minimiert werden, und die auch in der Lage ist, die Informationen
anzuzeigen, durch die der Benutzer selbst in dem Fall einer Abweichung
von der Route seinen Bestimmungsort leicht erreichen kann.