CN203272768U - 驻车装置 - Google Patents
驻车装置 Download PDFInfo
- Publication number
- CN203272768U CN203272768U CN201190000718.0U CN201190000718U CN203272768U CN 203272768 U CN203272768 U CN 203272768U CN 201190000718 U CN201190000718 U CN 201190000718U CN 203272768 U CN203272768 U CN 203272768U
- Authority
- CN
- China
- Prior art keywords
- positioning plate
- rotation
- gear
- follower lever
- locking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
- F16H63/3458—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire
- F16H63/3466—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire using electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/005—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles by locking of wheel or transmission rotation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T1/00—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles
- B60T1/02—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels
- B60T1/06—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels
- B60T1/062—Arrangements of braking elements, i.e. of those parts where braking effect occurs specially for vehicles acting by retarding wheels acting otherwise than on tread, e.g. employing rim, drum, disc, or transmission or on double wheels acting on transmission parts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D63/00—Brakes not otherwise provided for; Brakes combining more than one of the types of groups F16D49/00 - F16D61/00
- F16D63/006—Positive locking brakes
Abstract
本实用新型公开一种驻车装置,利用锁止杆对驻车齿轮进行锁止或解除锁止,在使驻车装置从解除锁止状态向锁止状态转移时,若嵌合构件到达定位板的外周面的第一位置,则切断向马达的电力供给。此时,旋转体的旋转能量被旋转能量吸收构件吸收。另外,在使驻车装置从锁止状态向解除锁止状态转移时,若嵌合构件到达第二位置,则切断向马达的电力供给。此时,旋转体的旋转能量也被旋转能量吸收构件吸收。
Description
技术领域
本实用新型涉及驻车装置。
背景技术
以往,在车辆的变速装置配置有驻车装置。在换挡杆被换挡至驻车挡位(P挡位)时,驻车装置通过使在变速装置内部设置的驻车齿轮和锁止杆(lock pawl)相互卡合,来防止车辆发生意外移动。
在这种驻车装置中,例如如专利文献1所示,在促动器(马达)经由控制杆使制动板(detent plate)旋转时,自动变速器控制装置和停车杆(park rod)同时被操作。并且,在借助促动器的驱动而使自动变速器控制装置处于P挡位时,在停车杆的前端设置的圆锥状的锁止凸轮移位到使锁止杆与驻车齿轮啮合的锁止位置。由此,与锁止杆啮合的驻车齿轮被禁止旋转,自动变速器的输出轴的旋转也被限制。此时,制动板的移位被带辊的制动弹簧(detent spring)定位并保持在P挡位。
现有技术文献
专利文献
专利文献1:日本特开2008-39094号公报
实用新型内容
实用新型所要解決的问题
但是,利用促动器进行旋转的控制杆与制动板直接连接。另外,该制动板与安装有锁止凸轮的停车杆直接连接。也就是说,控制杆的位置、即马达的转动位置对应于与驻车锁止杆相卡合的锁止凸轮的位置。
因此,促动器对控制杆的定位精度被要求高的精度,使用旋转编码器等高精度的传感器,以PWM(Pulse Width Modulation:脉冲宽度调制)控制或PID(Proportional,Integral,Differential:比例,积分,微分)控制这样的高度进行复杂的控制。其结果导致驻车装置的成本上升。
作为避免该问题的方法之一,考虑有如下方法:作为促动器使用非驱动扭矩小的促动马达,利用制动弹簧的弹力对制动板的定位,来提高挡位切换的精度。但是,在该情况下,需要减小促动马达的齿槽扭矩。
作为该解决方法,探讨采用SR马达或无芯马达等不产生齿槽扭矩的马达,但在该方法中,马达的成本高,难以实现驻车装置的低成本化。
本实用新型的目的在于提供一种驻车装置,其成本低,能够降低施加在构成部件上的负荷,并且能够有选择地在对驻车齿轮进行锁止和解除锁止之间进行控制。
用于解决问题的手段
根据本实用新型的一个方式,提供一种驻车装置,利用锁止杆对驻车齿轮进行锁止或解除锁止,具有:
旋转体,伴随马达的正转或反转来进行正转或反转;
从动杆,与所述旋转体相卡合,并伴随所述旋转体的正转或反转来进行摆动;
定位板,伴随所述从动杆向正向或反向的摆动,来向正向或反向进行摆动,有选择地将所述锁止杆引导至与所述驻车齿轮啮合的锁止位置和解除该啮合的解除锁止位置,并且,该定位板具有外周面;
第一嵌合部以及第二嵌合部,形成在所述定位板的外周面上,
嵌合构件,能够与所述定位板的外周面滑动接触并按压所述外周面,通过与所述第一嵌合部或所述第二嵌合部相嵌合,来将所述锁止杆保持在所述锁止位置或所述解除锁止位置上;
卡合构件,设置在所述从动杆上,通过与进行正转的所述旋转体相卡合来使所述从动杆进行正转,并且,通过与进行反转的所述旋转体相卡合来使所述从动杆进行反转;
切断部,在所述嵌合构件到达所述定位板上的所述第一位置或所述第二位置时,切断向所述马达的电力供给;
弹性构件,在切断向所述马达的电力供给时,按压所述嵌合构件来使所述定位板摆动,由此使所述嵌合构件与所述定位板的所述第一嵌合部或所述第二嵌合部相嵌合;
旋转能量吸收构件,在切断向所述马达的电力供给时,用于吸收所述旋 转体的旋转能量。
在本实用新型的驻车装置中,所述旋转体包括驱动齿轮,在所述驱动齿轮的一个侧面上形成有沿周向延伸的圆弧状的嵌合槽,在所述嵌合槽内以能够沿周向移动的方式插入并贯通有所述从动杆的所述卡合构件,在所述嵌合槽的周向的两端内面分别设置有第一卡合部和第二卡合部,所述卡合构件伴随所述旋转体的正转或反转,来分别与所述第一或第二卡合部相抵接。
在本实用新型的驻车装置中,所述弹性构件包括在前端部具有所述嵌合构件的定位弹簧,所述定位弹簧利用弹力经由所述嵌合构件总是按压所述定位板的外周面,在所述定位板沿第一摆动方向摆动到所述第一位置时,所述弹性构件利用按压力来使所述定位板沿所述第一摆动方向摆动,由此使所述嵌合构件与所述第一嵌合部相嵌合,在所述定位板沿与第一摆动方向相反的第二摆动方向摆动到所述第二位置时,所述弹性构件利用按压力使所述定位板沿所述第二摆动方向摆动,由此使所述嵌合构件与所述第二嵌合部相嵌合。
在本实用新型的驻车装置中,设置有覆盖所述旋转体的箱体;所述旋转能量吸收构件包括螺旋弹簧和阻挡构件,所述螺旋弹簧在两端分别具有第一卡合端以及第二卡合端,所述螺旋弹簧以及所述阻挡构件中的一个设置在所述旋转体上,所述螺旋弹簧以及所述阻挡构件中的另一个设置在箱体上,在所述嵌合构件到达所述定位板的所述第一位置或所述第二位置时,所述阻挡构件配置在与所述螺旋弹簧的所述第一卡合端或所述第二卡合端接近的位置。
在本实用新型的驻车装置中,所述螺旋弹簧设置在所述旋转体上,并且伴随所述旋转体的旋转来进行旋转,所述阻挡构件设置在所述箱体上,并且配置在所述螺旋弹簧的旋转轨迹上。
在本实用新型的驻车装置中,设置有覆盖所述旋转体的箱体,所述旋转能量吸收构件具有:圆筒壁,设置在所述旋转体的外周上,可动凸轮,形成在所述圆筒壁的内周面上,与所述旋转体一起进行旋转,第一倾斜凸轮面以及第二倾斜凸轮面,形成在所述可动凸轮上,螺旋扭簧,设置在所述箱体上,并且形成为从所述箱体的中心位置呈螺旋状向所述圆筒壁弯曲,接触件,设置在所述螺旋扭簧的前端上;在所述嵌合构件到达所述定位板的所述第一位 置或所述第二位置时,所述螺旋扭簧的所述接触件与所述可动凸轮的所述第一倾斜凸轮面或所述第二倾斜凸轮面相抵接。
附图说明
图1是表示本实用新型的一实施方式的驻车装置的主要部分的立体图。
图2是表示图1所示的驻车装置的驱动装置的主要部分的分解立体图。
图3是图2所示的驱动装置的局部剖切立体图。
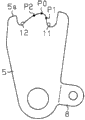
图4是定位板的局部剖切主视图。
图5是表示驱动齿轮的主视图。
图6(a)是用于说明从解除锁止状态变为锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图6(b)是用于说明从解除锁止状态变为锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图6(c)是用于说明从解除锁止状态变为锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图6(d)是用于说明从该解除锁止状态变为锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图7(a)是用于说明从锁止状态变为解除锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图7(b)是用于说明从锁止状态变为解除锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图7(c)是用于说明从锁止状态变为解除锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图7(d)是用于说明从锁止状态变为解除锁止状态时的驱动齿轮和卡合突起的相对位置的说明图。
图8是表示图2所示的驱动装置的电气结构的电路框图。
图9是表示驻车装置的驱动装置的其他例子的主要部分的局部剖切立体图。
图10是表示图9所示的驱动装置的分解立体图。
具体实施方式
(第一实施方式)
以下,根据附图对本实用新型的一个实施方式的驻车装置进行说明。
如图1所示,驻车装置1具有驻车齿轮2、以及能够与驻车齿轮2卡合或分离的锁止杆3。该驻车齿轮2以及锁止杆3设置于在车辆上配置的变速装置的箱体(未图示)内。
驻车齿轮2安装于支撑在变速装置的箱体内的发动机的曲轴(未图示)上,并与曲轴一体旋转。并且,通过使驻车齿轮2的齿2a与锁止杆3的卡止爪3a啮合,驻车齿轮2的旋转被禁止。
锁止杆3与驻车齿轮2相邻配置,并能够摆动地支撑在固定在变速装置的箱体内的未图示的中间板上。锁止杆3的基端部相对在中间板上设置的支撑轴4能够摆动地支撑在该支撑轴4上。锁止杆3能够围绕该支撑轴4的中心轴线C1摆动。
锁止杆3的卡止爪3a在与驻车齿轮2相向的面上形成在长度方向的中间部。锁止杆3向驻车齿轮2摆动,由此,卡止爪3a被引导至与驻车齿轮2的齿2a啮合的位置(以下称为锁止位置)。并且,通过将卡止爪3a引导至锁止位置,锁止杆3使驻车齿轮2不能旋转。
相反地,锁止杆3向从驻车齿轮2的齿2a离开的方向摆动,由此,如图1所示,卡止爪3a被引导至解除与驻车齿轮2的齿2a的啮合的位置(以下称为解除锁止位置)。并且,通过将卡止爪3a引导至解除锁止位置,由此锁止杆3能够使驻车齿轮2旋转。
在与锁止杆3相邻的位置上设置有定位板5。定位板5是大致圆弧状的板体。定位板5的基端部安装在从变速装置的箱体外插入该箱体的驱动装置6(参照图2、3)的旋转轴7上。并且,定位板5能够伴随驱动装置6的旋转轴7的正转或反转来一体地摆动。
在定位板5的基端部上形成有连接臂8。连接臂8安装在停车杆9的基端上,与定位板5(连接臂8)一起围绕旋转轴7的中心轴线转动。停车杆9具有在两处弯折成L字状的基端部和直线状的杆部9a。杆部9a形成为延伸到锁止杆3的与驻车齿轮2相反一侧的面。并且,伴随定位板5的往复转动,停车杆9的杆部9a沿着与锁止杆3交叉的方向往复移动。
在停车杆9的杆部9a上安装有螺旋弹簧SP1。螺旋弹簧SP1的基端部与 在杆部9a上形成的阻挡片9b卡合,螺旋弹簧SP1的前端部与能够在杆部9a上滑动的控制凸轮10卡合。
控制凸轮10被螺旋弹簧SP1总是向杆部9a的前端按压。并且,控制凸轮10具有锥状中的圆锥形状的凸轮面10a。凸轮面10a与锁止杆3的与驻车齿轮2相反一侧的面滑动接触。因此,当停车杆9的杆部9a伴随定位板5的往复摆动来进行往复移动时,控制凸轮10一边在锁止杆3的与驻车齿轮2相反一侧的面上滑动一边进行往复移动。其结果,基于控制凸轮10的滑动,锁止杆3围绕支撑轴4的中心轴线C1摆动。也就是说,锁止杆3借助定位板5的摆动而在锁止位置和解除锁止位置之间摆动。
详细地说,在图1中,当定位板5向逆时针方向转动时,停车杆9以及控制凸轮10向锁止杆3移动。伴随控制凸轮10的移动,锁止杆3向驻车齿轮2摆动。由此,锁止杆3的卡止爪3a从解除锁止位置被引导至锁止位置。
相反地,当从锁止位置起,定位板5向顺时针方向转动时,停车杆9以及控制凸轮10向从锁止杆3离开的方向后退。伴随控制凸轮10的移动,锁止杆3向从驻车齿轮2离开的方向摆动。由此,锁止杆3的卡止爪3a从锁止位置被引导至解除锁止位置。
此外,在本实施方式中,锁止杆3被未图示的弹性构件在图1中向逆时针方向施加弹力,总是按压控制凸轮10。
如图4所示,在定位板5的圆弧状的外周面5a上,形成有锁止保持凹部11和解除锁止保持凹部12。锁止保持凹部11形成在定位板5的外周面5a的一侧,并在图1以及图4中形成在顺时针方向侧。另一方面,解除锁止保持凹部12形成在定位板5的外周面5a的另一侧,并且在图1以及图4中形成在逆时针方向侧。
并且,如图4所示,锁止保持凹部11和解除锁止保持凹部12之间的外周面5a的形状是横跨锁止保持凹部11和解除锁止保持凹部12的山形形状,并且是最高的最顶点P0偏向锁止保持凹部11侧的非对称的山形形状。也就是说,以最顶点P0为界,锁止保持凹部11的外周面5a以陡坡的倾斜状形成,解除锁止保持凹部12的外周面5a以缓坡的倾斜状形成。
如图1所示,在定位弹簧SP2的前端部设置的作为嵌合构件的辊R按压在定位板5的外周面5a上。定位弹簧SP2由板簧构成。定位弹簧SP2的基 端部固定在未图示的中间板上。在定位弹簧SP2的前端部设置的辊R总是按压在定位板5的外周面5a上。
并且,在定位板5位于图1所示的解除锁止位置时,定位弹簧SP2的辊R嵌合在解除锁止保持凹部12内。相反地,在定位板5位于锁止位置时,定位弹簧SP2的辊R嵌合在锁止保持凹部11内。
详细地说,当定位板5借助驱动装置6的旋转轴7从定位板5位于图1所示的解除锁止位置的状态向逆时针方向摆动时,定位弹簧SP2的辊R在外周面5a上从解除锁止保持凹部12向锁止保持凹部11滑动。并且,在辊R从解除锁止保持凹部12越过外周面5a的最顶点P0并位于图4所示的预先设定的第一位置P1的倾斜面时,按压在外周面5a上的辊R借助施加在外周面5a上的定位弹簧SP2的弹力的逆时针方向的分力来使定位板5向逆时针方向摆动。由此,辊R嵌合在锁止保持凹部11内。
相反地,在定位板5借助驱动装置6的旋转轴7从定位板5位于锁止位置的状态向顺时针方向摆动时,定位弹簧SP2的辊R在外周面5a上从锁止保持凹部11向解除锁止保持凹部12滑动。并且,在辊R从锁止保持凹部11越过外周面5a的最顶点P0并位于图4所示的预先设定的第二位置P2的倾斜面时,辊R借助施加在外周面5a上的定位弹簧SP2的弹力的顺时针方向的分力来使定位板5向顺时针方向摆动。由此,如图1所示,辊R嵌合在解除锁止保持凹部12内。
接着,根据图2以及图3对使定位板5摆动的驱动装置6进行说明。如图2以及图3所示,驱动装置6容纳在与变速装置相邻的箱体20内。箱体20包括底板21和顶壳22。
如图2所示,在底板21上形成有将旋转轴7支撑为能够旋转的轴承25。利用该轴承25将旋转轴7支撑为能够旋转且不能沿轴线方向移动。另外,旋转轴7从轴承25突出。在旋转轴7的基端部上安装有扇形齿轮26。因此,扇形齿轮26能够围绕旋转轴7的中心轴线与该旋转轴7一体摆动。
底板21利用固定构件27将有刷马达M沿着板面21a固定。因此,有刷马达M的输出轴28与板面21a隔着一定的间隔并与板面21a平行地延伸。
在有刷马达M的输出轴28上安装有蜗杆29。蜗杆29与涡轮30啮合,以将有刷马达M的旋转传递至涡轮30。涡轮30被在底板21上设置的第一 支撑轴31支撑为能够旋转,并且借助蜗杆29(输出轴28)的旋转,能够围绕第一支撑轴31的中心轴线进行旋转。
由正齿轮构成的小齿轮32被第一支撑轴31支撑为能够旋转,并且能够与涡轮30一体旋转。小齿轮32与涡轮30连接,借助蜗杆29(输出轴28)的旋转来围绕第一支撑轴31的中心轴线与涡轮30一起一体地旋转。
小齿轮32与齿数比该小齿轮32多的由正齿轮构成的驱动齿轮33啮合,使驱动齿轮33进行旋转。在底板21上立设有第二支撑轴34。驱动齿轮33被能够旋转地安装在第二支撑轴34上的轴套(collar)35支撑。详细地说,驱动齿轮33相对于轴套35能够旋转地被支撑在轴套35上,借助小齿轮32的旋转围绕第二支撑轴34的中心轴线旋转。
如图5所示,在驱动齿轮33的侧面33a以贯通的方式形成有圆弧状的嵌合槽36。嵌合槽36的外周边和内周边都为圆弧状,并且是以第二支撑轴34的中心轴线为中心的圆弧。
另外,在既是驱动齿轮33的侧面33a又是其外周的位置形成有圆筒壁41,并且,在隔着第二支撑轴34的中心轴与嵌合槽36相向的位置形成有圆弧壁42。圆弧壁42与圆筒壁41隔开规定的间隔并与圆筒壁41平行地立设。在圆弧壁42和圆筒壁41之间的侧面33a上形成有圆弧状的容纳槽43。容纳槽43形成容纳空间S。
在容纳空间S内配置有螺旋弹簧45。螺旋弹簧45沿着容纳槽43呈圆弧状配置。防脱构件46以贯通的方式插入在螺旋弹簧45内,防脱构件46的两端卡止在容纳槽43的开口端。
在圆弧壁42的顶端形成有卡止部42a。螺旋弹簧45被卡止部42a卡止,从而以防止从容纳槽43向顶壳22脱出。另外,螺旋弹簧45借助插入该弹簧45内的防脱构件46来防止从容纳槽43向底板21脱出。进而,螺旋弹簧45的第一以及第二卷绕端45a、45b的一部分分别卡止在容纳槽43的两侧端缘43a、43b,来防止螺旋弹簧45沿容纳槽43的周向脱出。
从顶壳22观察,呈圆弧状配置的螺旋弹簧45的中心轴线的曲率半径与呈圆弧状形成的嵌合槽36的中心线的曲率半径相一致。螺旋弹簧45是压缩弹簧,螺旋弹簧45的两个第一以及第二卷绕端45a、45b沿周向受到力。
也就是说,在图5中,在位于顺时针侧的螺旋弹簧45的第一卷绕端45a 受到逆时针方向的力时,螺旋弹簧45向逆时针方向压缩。相反地,在位于逆时针侧的螺旋弹簧45的第二卷绕端45b受到顺时针方向的力时,螺旋弹簧45向顺时针方向压缩。
如图2所示,在将驱动齿轮33支撑为能够旋转的轴套35上安装有从动杆48,与该轴套35一体旋转。在从动杆48的前端向驱动齿轮33突出形成有卡合突起49。卡合突起49插入并贯通在驱动齿轮33的侧面33a形成的嵌合槽36。
在此,为了从解除锁止状态变为锁止状态,在驱动齿轮33在图6(a)性向顺时针方向转动的情况下,驱动齿轮33在将卡合突起49插入在嵌合槽36内的状态下转动。不久,在位于嵌合槽36的逆时针侧的第一端面36a(参照图6(b))与卡合突起49抵接时,通过该抵接,从动杆48随着驱动齿轮33的转动而向顺时针方向跟着转动。通过该从动杆48向顺时针方向摆动,轴套35在图6中向顺时针方向转动。
相反地,为了从锁止状态变为解除锁止状态,在驱动齿轮33在图7(a)中向逆时针方向转动的情况下,驱动齿轮33在将卡合突起49插入在嵌合槽36内的状态转动。不久,在位于嵌合槽36的顺时针方向的第二端面36b(参照图7(b))与卡合突起49抵接时,通过该抵接,从动杆48随着驱动齿轮33的转动而向逆时针方向跟着转动。通过该从动杆48向逆时针方向摆动,轴套35在图7中向逆时针方向转动。
在所述轴套35上安装有由正齿轮构成的从动齿轮50,与从动杆48一体旋转。从动齿轮50与所述扇形齿轮26的齿轮部26a啮合。因此,随着驱动齿轮33的转动而跟着转动的从动杆48(从动齿轮50)的旋转力传递给扇形齿轮26。其结果,扇形齿轮26围绕旋转轴7的中心轴线与该旋转轴7一体旋转,使定位板5摆动。
并且,如图1所示,在本实施方式中,在位于定位弹簧SP2的辊R嵌合在定位板5的解除锁止保持凹部12内的解除锁止位置时,从动杆48的卡合突起49相对于驱动齿轮33的嵌合槽36以图6(a)所示的相对位置关系配置。
另外,在位于定位弹簧SP2的辊R嵌合在定位板5的锁止保持凹部11内的锁止位置时,从动杆48的卡合突起49相对于驱动齿轮33的嵌合槽36 以图7(a)所示的相对位置关系配置。
也就是说,通过使有刷马达M正转,来使驱动齿轮33在图6(a)中向顺时针方向转动,由此,驱动齿轮33在将卡合突起49插入在嵌合槽36内的状态下转动。不久,如图6(b)所示,当嵌合槽36的逆时针方向的第一端面36a与卡合突起49抵接时,通过该抵接,随着驱动齿轮33的转动,从动杆48也向顺时针方向跟着转动。通过该从动杆48向顺时针方向摆动,从动齿轮50在图2中顺时针方向摆动。
通过该从动齿轮50向顺时针方向的摆动,扇形齿轮26向逆时针方向摆动,经由旋转轴7使定位板5向逆时针方向摆动。通过使定位板5向逆时针方向摆动,定位弹簧SP2的辊R从解除锁止保持凹部12离开并向锁止保持凹部11在外周面5a上滑动。
不久,在卡合突起49(从动杆48)借助驱动齿轮33跟着转动到图6(c)所示的位置时,辊R越过摆动的定位板5的外周面5a的最顶点P0而到达预先设定的第一位置P1。当辊R到达第一位置P1时,切断向有刷马达M的电力供给。
并且,在辊R位于外周面5a的第一位置P1时,辊R利用施加在外周面5a上的定位弹簧SP2的弹力的逆时针方向的分力来使定位板5向逆时针方向摆动。然后,辊R嵌合在锁止保持凹部11内。
利用该弹簧SP2的弹力使定位板5向逆时针方向的摆动传递至从动齿轮50以及从动杆48,使从动齿轮50以及从动杆48向顺时针方向转动。由此,如图6(d)所示,与嵌合槽36的第一端面36a抵接的卡合突起49从第一端面36a离开。
由此,锁止杆3从解除锁止位置被引导至卡止爪3a与驻车齿轮2的齿2a啮合的锁止位置,使驻车齿轮2不能旋转。
相反地,要使驱动齿轮33和卡合突起49从图7(a)所示的锁止位置向解除锁止位置移动,有刷马达M被反转。通过使有刷马达M反转来使驱动齿轮33在图7(a)中向逆时针方向转动,由此,驱动齿轮33在将卡合突起49插入在嵌合槽36内的状态转动。
不久,如图7(b)所示,当嵌合槽36的顺时针方向的第二端面36b与卡合突起49抵接时,通过该抵接,从动杆48伴随驱动齿轮33的转动向逆 时针方向跟着转动。通过该从动杆48向逆时针方向摆动,从动齿轮50也在图2中向逆时针方向转动。
通过该从动齿轮50向逆时针方向的转动,扇形齿轮26向顺时针方向摆动并经由旋转轴7使定位板5向顺时针方向摆动。通过使定位板5向顺时针方向摆动,定位弹簧SP2的辊R从锁止保持凹部11离开并向解除锁止保持凹部12在外周面5a上滑动。
不久,卡合突起49(从动杆48)借助驱动齿轮33跟着转动到图7(c)所示的位置时,辊R越过摆动的定位板5的外周面5a的最顶点P0而到达预先设定的第二位置P2。
当辊R越过最顶点P0而到达预先设定的第二位置P2时,切断向有刷马达M的电力供给。
并且,在辊R越过第二位置P2时,辊R利用施加在外周面5a上的定位弹簧SP2的弹力的顺时针方向的分力来使定位板5向顺时针方向摆动。由此,辊R嵌合在解除锁止保持凹部12内。
利用该弹簧SP2的弹力使定位板5向顺时针方向的摆动传递给从动齿轮50以及从动杆48,使从动齿轮50以及从动杆48向逆时针方向转动。由此,如图7(d)所示,与嵌合槽36的第二端面36b卡合的卡合突起49从第二端面36b离开。
由此,锁止杆3从锁止位置被引导至卡止爪3a从驻车齿轮2的齿2a离开的解除锁止位置,使驻车齿轮2能够旋转。
如图3所示,在所述顶壳22的内侧面22a上,以向驱动齿轮33延伸的方式形成有阻挡构件51。如在图5中用双点划线所示那样,从顶壳22观察,阻挡构件51为以沿着容纳在驱动齿轮33的容纳空间S内的螺旋弹簧45的中心轴线延伸的方式形成的圆弧状的壁。并且,在驱动齿轮33向顺时针方向旋转并位于图6(c)以及图6(d)所示的位置时,螺旋弹簧45的顺时针方向侧的第一卷绕端45a接近阻挡构件51的逆时针侧卡合端51b。也就是说,在驱动齿轮33到达图6(c)所示的位置时,螺旋弹簧45利用弹力吸收向顺时针方向的旋转能量,限制卡合突起49(从动杆48)进一步向顺时针方向跟着转动。
相反地,在驱动齿轮33向逆时针方向旋转并位于图7(c)以及图7(d) 所示的位置时,螺旋弹簧45的逆时针侧的第二卷绕端45b接近阻挡构件51的顺时针侧的卡合端51a。也就是说,在驱动齿轮33到达图7(c)所示的位置时,螺旋弹簧45利用弹力吸收向逆时针方向的旋转能量,限制卡合突起49(从动杆48)进一步向逆时针方向跟着转动。
详细地说,在卡合突起49(从动杆48)借助驱动齿轮33向顺时针方向跟着转动到图6(c)所示的位置时,辊R越过摆动的定位板5的外周面5a的最顶点P0而到达预先设定的第一位置P1。并且,切断向有刷马达M的电力供给,定位板5借助定位弹簧SP2的弹力摆动。并且,辊R嵌合在锁止保持凹部11内。
此时,若切断电力供给的有刷马达M立即停止则没有问题,但考虑存在有刷马达M利用惯性进行旋转的情况。在有刷马达M利用惯性进行旋转时,驱动齿轮33与如图6图(d)所示那样暂时向顺时针方向离开的卡合突起49(从动杆48)再次卡合,使卡合突起49跟着转动。
此时,定位板5位于辊R嵌合在锁止保持凹部11内的锁止位置,其以上的向逆时针方向的摆动被禁止。因此,因卡合突起49(从动杆48)的跟着转动,而作用有要使定位板5进一步向逆时针方向摆动的力。该力施加在对嵌合在定位板5的锁止保持凹部11内的辊R进行支撑的定位弹簧SP2等驻车装置的构件部件上,有可能对其造成损伤。
对此,通过使螺旋弹簧45与阻挡构件51卡合,利用螺旋弹簧45的弹力来吸收驱动齿轮33向逆时针方向的旋转能量。其结果,定位板5的其以上的向逆时针方向的摆动被限制,降低施加在定位弹簧SP2等驻车装置的构成部件上的负荷。
同样地,在卡合突起49(从动杆48)借助驱动齿轮33向逆时针方向跟着转动到图7(c)所示的位置时,辊R越过摆动的定位板5的外周面5a的最顶点P0而到达预先设定的第二位置P2。并且,切断相有刷马达M的电力供给,定位板5借助定位弹簧SP2的弹力进行摆动。并且,辊R嵌合在解除锁止保持凹部12内。
此时,同样地,考虑存在切断电力供给的有刷马达M利用惯性进行旋转的情况。在有刷马达M利用惯性进行旋转的情况下,驱动齿轮33与如图7图(d)所示那样暂时向逆时针方向离开的卡合突起49(从动杆48)再次卡 合,使该卡合突起49跟着转动。
此时,定位板5位于辊R嵌合在解除锁止保持凹部12内的解除锁止位置,其以上的向顺时针方向的摆动被禁止。因此,因卡合突起49(从动杆48)的跟着转动,而作用有要使定位板5进一步向顺时针方向摆动的力。该力施加在对嵌合在定位板5的解除锁止保持凹部12内的辊R进行支撑的定位弹簧SP2等的驻车装置的构成部件上,有可能对其造成损伤。
对此,通过使螺旋弹簧45与阻挡构件51卡合,利用螺旋弹簧45的弹力来吸收驱动齿轮33向顺时针方向的旋转能量。其结果,定位板5的其以上的向顺时针方向的摆动被限制,降低施加在定位弹簧SP2等的驻车装置的构成部件上的负荷。
另外,为了吸收驱动齿轮33的旋转能量,而使螺旋弹簧45弾性变形,因此能够缓缓地吸收驱动齿轮33的旋转能量。由此,例如与使两个卡止片彼此卡合来停止旋转的情况相比较,若采用上述结构,则冲击也变得非常小,能够静静地使驱动齿轮33的旋转停止。
接着,根据图8来说明对有刷马达M进行驱动控制的驻车装置的电气结构。
旋转检测器54设置在箱体20内,对旋转轴7的旋转位置进行检测。旋转检测器54经由旋转轴7的旋转位置来检测定位板5的每一时刻的转动位置、即辊R在定位板5的外周面5a上滑动的每一时刻的滑动接触位置,并将该检测信号输出到电子控制单元(ECU)55。换挡杆位置检测器56对换挡杆的各换挡操作位置进行检测并将该检测信号向ECU55输出。
ECU55具有微型计算机,经由驱动电路57对有刷马达M进行控制。在ECU55基于来自换挡杆位置检测器56的检测信号而检测出换挡杆从P挡位切换到除P挡位以外的挡位时,将用于使有刷马达M正转的正转控制信号向驱动电路57输出。驱动电路57响应来自ECU55的正转控制信号来使有刷马达M正转。
另外,在ECU55基于来自换挡杆位置检测器56的检测信号检测出换挡杆从除P挡位以外的挡位切换至P挡位时,将用于使有刷马达M反转的逆转控制信号向驱动电路57。驱动电路57响应来自ECU55的逆转控制信号来使有刷马达M反转。
另一方面,ECU55基于来自旋转检测器54的检测信号来检测辊R和定位板5的外周面5a的每一时刻的滑动接触位置以及定位板5的摆动方向。并且,ECU55基于来自旋转检测器54的检测信号,来检测出定位板5向逆时针方向摆动并且辊R通过进行摆动的定位板5的外周面5a的最顶点P0而到达第一位置P1。并且,ECU55在检测出辊R到达第一位置P1时,为了切断向正在正转的有刷马达M的电力供给,而将切断控制信号向驱动电路57输出。驱动电路57响应来自ECU55的切断控制信号,来切断向正在正转的有刷马达M的电力供给。
另外,ECU55基于来自旋转检测器54的检测信号,来检测出定位板5向逆时针方向摆动并且辊R通过进行摆动的定位板5的外周面5a的最顶点P0而到达第二位置P2。ECU55在检测出辊R到达第二位置P2时,为了切断向正在反转的有刷马达M的电力供给,而将切断控制信号向驱动电路57输出。驱动电路57响应来自ECU55的切断控制信号,来切断向正在反转的有刷马达M的电力供给。
此外,有刷马达M的驱动电路57是公知的驱动电路,例如考虑有使用了4个功率MOS晶体管的H型电桥电路。并且,ECU55对4个功率MOS晶体管适当地进行导通和截止控制,来使有刷马达M正转或反转,或切断电力供给。
接着,对如上述那样构成的驻车装置的作用进行说明。
(1)从解除锁止状态变为锁止状态
现在,在驻车装置处于解除锁止状态时,如图1所示,锁止杆3位于解除锁止位置。另外,驱动齿轮33和从动杆48的卡合突起49配置在图6(a)所示的相对位置。进而,如图1所示,处于在定位板5的解除锁止保持凹部12内嵌合有定位弹簧SP2的辊R的状态。
(换挡杆被换挡至P挡位的情况)
在换挡杆换挡至P挡位时,ECU55经由驱动电路57向有刷马达M供给驱动电力,使有刷马达M正转。通过该正转,驱动齿轮33在图2以及图6(a)中向顺时针方向转动。此时,驱动齿轮33在将从动杆48的卡合突起49插入在嵌合槽36内的状态下进行转动。
(由从动杆48的跟着转动带来的定位板5的摆动)
通过驱动齿轮33向顺时针方向的转动,不久,如图6(b)所示,嵌合槽36的第一端面36a与从动杆48的卡合突起49抵接。通过该抵接,克服定位弹簧SP2的弹力的顺时针方向的分力,使从动杆48向顺时针方向跟着转动。通过从动杆48向顺时针方向摆动,定位板5也在图1以及图6(b)中向逆时针方向摆动。
通过定位板5的逆时针方向的摆动,停车杆9以及控制凸轮10向锁止杆3移动。由此,锁止杆3的卡止爪3a从解除锁止位置被引导至锁止位置。
另外,通过定位板5的逆时针方向的摆动,定位弹簧SP2的辊R从解除锁止保持凹部12离开并向锁止保持凹部11在外周面5a上滑动。进而,ECU55基于来自旋转检测器54的检测信号,开始检测辊R和定位板5的外周面5a之间的滑动接触位置。
并且,在定位板5进行摆动并且辊R越过外周面5a的最顶点P0而到达预先设定的第一位置P1时,ECU55将切断控制信号向驱动电路57输出,切断向正在正转的有刷马达M的电力供给。由此,因切断向有刷马达M的电力供给,使有刷马达M(驱动齿轮33)停止。
此时,如图6(c)所示,驱动齿轮33和从动杆48在嵌合槽36的第一端面36a与卡合突起49抵接的状态下未直接连接。因此,辊R利用施加在外周面5a上的定位弹簧SP2的弹力的逆时针方向的分力,使定位板5单独向逆时针方向摆动。通过使定位板5单独向逆时针方向摆动,从动杆48向顺时针方向摆动。
此外,在辊R到达第一位置P1而切断向有刷马达M的电力供给时,如图6(c)所示,在驱动齿轮33上设置的螺旋弹簧45的顺时针侧的第一卷绕端45a与阻挡构件51的逆时针侧的卡合端51b抵接。并且,在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向顺时针方向旋转的情况下,阻挡构件51的卡合端51b按压螺旋弹簧45。因此,驱动齿轮33的旋转能量被螺旋弹簧45的弹力吸收,使驱动齿轮33停止。其结果,卡合突起49(从动杆48)不会进一步向顺时针方向跟着转动。
(卡合突起49从第一端面36a的离开)
借助定位板5的单独的摆动,辊R嵌合在锁止保持凹部11内。并且,在辊R嵌合在锁止保持凹部11内时,锁止杆3被引导至锁止位置。另一方 面,从动杆48如图6(d)所示那样,与嵌合槽36的第一端面36a卡合的卡合突起49从第一端面36a离开并停止。
(2)从锁止状态变为解除锁止状态
现在,在驻车装置1处于锁止状态时,锁止杆3位于锁止位置。另外,驱动齿轮33和从动杆48的卡合突起49配置在图6(d)以及图7(a)所示的相对位置。进而,处于在定位板5的锁止保持凹部11内嵌合有定位弹簧SP2的辊R的状态。
(换挡杆被换挡至除P挡位以外的挡位的情况)
在换挡杆从P挡位被换挡至除P挡位以外的挡位时,ECU55经由驱动电路57向有刷马达M供给驱动电力,使有刷马达M反转。向有刷马达M供给驱动电力,有刷马达M进行反转。通过该反转,驱动齿轮33在图7(a)中向逆时针方向转动。此时,驱动齿轮33在将从动杆48的卡合突起49插入在嵌合槽36内的状态下转动。
(由从动杆48的跟着转动带来的定位板5的摆动)
通过驱动齿轮33的逆时针方向的转动,不久,嵌合槽36的第二端面36b与从动杆48的卡合突起49卡合。通过该卡合,克服定位弹簧SP2的弹力的逆时针方向的分力,使从动杆48向逆时针方向跟着转动。通过该从动杆48向逆时针方向摆动,定位板5也在图1中向顺时针方向摆动。
通过该定位板5的顺时针方向的摆动,停车杆9以及控制凸轮10以后退的方式移动,锁止杆3的卡止爪3a从锁止位置被引导至解除锁止位置。
另外,通过该定位板5的顺时针方向的摆动,定位弹簧SP2的辊R从锁止保持凹部11离开并向解除锁止保持凹部12在外周面5a上滑动。进而,ECU55基于来自旋转检测器54的检测信号,开始检测辊R和定位板5的外周面5a之间的滑动接触位置。
并且,在定位板5进行摆动并且辊R越过外周面5a的最顶点P0而到达预先设定的第二位置P2时,ECU55将切断控制信号向驱动电路57输出,切断向正在反转的有刷马达M的电力供给。由此,有刷马达M(驱动齿轮33)停止。
此时,如图7(c)所示,驱动齿轮33和从动杆48在嵌合槽36的第二端面36b与卡合突起49卡合的状态下未直接连接。因此,辊R利用施加在 外周面5a上的定位弹簧SP2的弹力的顺时针方向的分力,使定位板5单独向顺时针方向摆动。通过使该定位板5单独向顺时针方向摆动,从动杆48向逆时针方向摆动。
此外,在辊R到达第二位置P2而切断向有刷马达M的电力供给时,如图7(c)所示,在驱动齿轮33设置的螺旋弹簧45的逆时针侧的第二卷绕端45b与阻挡构件51的顺时针方向的卡合端51a抵接。并且,在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向逆时针方向旋转的情况下,阻挡构件51的卡合端51a按压螺旋弹簧45。因此,驱动齿轮33的旋转能量被螺旋弹簧45的弹力吸收,使驱动齿轮33停止。其结果,卡合突起49(从动杆48)不会进一步向逆时针方向跟着转动。
(卡合突起49从第二端面36b的离开)
借助定位板5的单独的摆动,辊R嵌合在解除锁止保持凹部12内。并且,在辊R嵌合在解除锁止保持凹部12内时,锁止杆3如图1所示那样被引导至解除锁止位置。另一方面,从动杆48如图7(d)所示那样,与嵌合槽36的第二端面36b卡合的卡合突起49从第二端面36b离开并停止。
接着,以下记载如上述那样构成的实施方式的效果。
(1)在驻车装置1从解除锁止状态向锁止状态转移时,辊R到达第一位置P1,切断向有刷马达M的电力供给。此时,如图6(c)所示,在驱动齿轮33上设置的螺旋弹簧45的顺时针侧的第一卷绕端45a与阻挡构件51的逆时针方向的卡合端51b抵接。
因此,即使在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向顺时针方向旋转的情况下,也能利用螺旋弹簧45的弹力来吸收驱动齿轮33的旋转能量,禁止使卡合突起49(从动杆48)进一步向顺时针方向跟着转动。
由此,能够防止如下情况,即,定位板5因从动杆48的跟着转动而进一步向逆时针方向摆动,导致在用于对嵌合在该定位板5的锁止保持凹部11内的辊R进行支撑的定位弹簧SP2等的驻车装置1的构成部件上施加大的负荷。
(2)在从锁止状态向解除锁止状态转移时,辊R到达第二位置P2,切断向有刷马达M的电力供给。此时,如图7(c)所示,在驱动齿轮33上设 置的螺旋弹簧45的逆时针侧的第二卷绕端45b与阻挡构件51的顺时针方向的卡合端51a抵接。
因此,即使在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向逆时针方向旋转的情况下,也能利用螺旋弹簧45的弹力来吸收驱动齿轮33的旋转能量,禁止使卡合突起49(从动杆48)进一步向逆时针方向跟着转动。
由此,能够防止如下情况,即,定位板5因从动杆48的跟着转动而进一步向顺时针方向摆动,导致在用于对嵌合在该定位板5的解除锁止保持凹部12内的辊R进行支撑的定位弹簧SP2的驻车装置1的构成部件上施加大的负荷。
(3)作为吸收驱动齿轮33的旋转能量的旋转能量吸收构件,采用了螺旋弹簧45。通过使螺旋弹簧45发生弹性变形,来缓缓地吸收驱动齿轮33的旋转能量。由此,冲击也非常小,能够静静地使驱动齿轮33停止旋转。
(4)在将锁止杆3从解除锁止位置引导至锁止位置时,直到辊R嵌合到定位板5的锁止保持凹部11内为止,无需对有刷马达M进行转动控制。
即,由旋转检测器54和ECU55检测出定位板5跟着驱动齿轮33(从动杆48)转动,并且辊R越过外周面5a的最顶点P0并位于第一位置P1,来切断向有刷马达M的电力供给,由此有刷马达M停止。以后,直到辊R嵌合在锁止保持凹部11内为止,辊R利用施加在外周面5a上的定位弹簧SP2的弹力的逆时针方向的分力,使定位板5单独向逆时针方向摆动。也就是说,定位板5的定位取决于定位弹簧SP2和定位板5。
因此,不要求由有刷马达M进行的定位板5相对于辊R的高精度的定位精度。换言之,由旋转检测器54和ECU55检测出辊R是否越过定位板5的外周面5a的最顶点P0并到达第一位置P1,来切断向有刷马达M的电力供给即可。
其结果,无需利用PWM控制或PID控制这样的高度进行复杂的马达控制,能够提供成本低的驻车装置。
(5)在将锁止杆3从锁止位置向解除锁止位置引导时,直到辊R嵌合在定位板5的解除锁止保持凹部12内为止,无需对有刷马达M进行转动控制。
即,由旋转检测器54和ECU55检测出定位板5跟随驱动齿轮33(从动杆48)转动,并且辊R越过外周面5a的最顶点P0并位于第二位置P2,来切断向有刷马达M的电力供给,由此有刷马达M停止。以后,直到辊R嵌合到解除锁止保持凹部12内为止,辊R利用施加在外周面5a上的定位弹簧SP2的弹力的顺时针方向的分力,使定位板5单独向顺时针方向摆动。也就是说,定位板5的定位取决于定位弹簧SP2和定位板5。
因此,不要求由有刷马达M进行的定位板5相对于辊R的高精度的定位精度。换言之,由旋转检测器54和ECU55检测出辊R是否越过定位板5的外周面5a的最顶点P0并到达预先设定的第二位置P2,来切断向有刷马达M的电力供给即可。
其结果,无需利用PWM控制或PID控制这样的高度进行复杂的马达控制,能够提供成本低的驻车装置。
(6)通过设置与定位板5一体进行旋转的从动杆48,从动杆48和驱动齿轮33相对转动。并且,就从动杆48和驱动齿轮33而言,在驱动齿轮33从一个方向相对从动杆48转动了规定量时,从动杆48在一个方向上跟着转动,在驱动齿轮33从另一个方向相对于从动杆48转动了所定量时,从动杆48在另一个方向上跟着转动。
也就是说,驱动齿轮33(有刷马达M)和从动杆48(定位板5)未直接连接,所以并不受使定位板5摆动的促动马达的非驱动扭矩要求值限制,能够采用成本低的有刷马达M。
(第二实施方式)
接着,根据附图对本实用新型的第二实施方式的驻车装置进行说明。第一实施方式具有如下结构,即,在切断向有刷马达M的电力供给时,利用螺旋弹簧45和阻挡构件51来禁止有刷马达M利用惯性进行旋转而使驱动齿轮33进一步旋转的情况。本实施方式与第一实施方式不同的结构是,禁止该驱动齿轮33进一步旋转的结构。因此,在本实施方式中,对与第一实施方式不同的部分进行详细说明,对于与第一实施方式相同的部分,为了便于说明而省略。
在图9以及图10中,在驱动齿轮33上形成的圆筒壁41的内周面形成有可动凸轮60。可动凸轮60呈山形形状,其两侧面形成有圆弧状的倾斜凸 轮面60a、60b。并且,可动凸轮60在驱动齿轮33旋转时,与该驱动齿轮33一起围绕第二支撑轴34的中心轴线进行转动。
如图9所示,在顶壳22的内侧面22a形成有夹持构件61,该夹持构件61向驱动齿轮33延伸。夹持构件61夹持固定螺旋扭簧(spiral torsion spring)62的基端部62a。螺旋扭簧62形成为沿顺时针方向呈螺旋状向外侧弯曲。在螺旋扭簧62的前端部形成有呈半圆弧状的接触件63。
并且,螺旋扭簧62的接触件63和旋转的可动凸轮60的相对位置关系预先设定。在本实施方式中,如图10所示,螺旋扭簧62借助向顺时针方向转动的驱动齿轮33而跟着转动。在辊R到达定位板5的外周面5a的第一位置P1时,螺旋扭簧62的接触件63与可动凸轮60的位于顺时针侧的倾斜凸轮面60a抵接。
也就是说,为了从解除锁止状态向锁止状态转移,在辊R到达第一位置P1而切断向有刷马达M的电力供给时,螺旋扭簧62的接触件63与可动凸轮60的顺时针侧的倾斜凸轮面60a抵接。并且,在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向顺时针方向旋转的情况下,螺旋扭簧62的接触件63还与可动凸轮60的倾斜凸轮面60a抵接。此时,螺旋扭簧62发生弹性变形,来吸收驱动齿轮33的旋转能量。
相反地,螺旋扭簧62借助向逆时针方向转动的驱动齿轮33而跟着转动,在辊R到达定位板5的外周面5a的第二位置P2时,螺旋扭簧62的接触件63与可动凸轮60的逆时针侧的倾斜凸轮面60b抵接。
也就是说,为了从锁止状态向解除锁止状态转移,在辊R到达第二位置P2而切断向有刷马达M的电力供给时,螺旋扭簧62的接触件63与可动凸轮60的逆时针方向的倾斜凸轮面60b抵接。并且,在万一有刷马达M利用惯性进行旋转而驱动齿轮33进一步向逆时针方向旋转的情况下,螺旋扭簧62的接触件63还与可动凸轮60的倾斜凸轮面60b抵接。此时,螺旋扭簧62发生弹性变形,来吸收驱动齿轮33的旋转能量。
若采用以上详细叙述的第二实施方式,则除了上述的第一实施方式的(3)~(6)的效果外,还得到以下的效果。
(7)在驻车装置1从解除锁止状态向锁止状态转移时,辊R到达第一位置P1而切断向有刷马达M的电力供给。此时,在驱动齿轮33上设置的 可动凸轮60的顺时针方向的倾斜凸轮面60a与在顶壳22上设置的螺旋扭簧62的接触件63抵接。
因此,在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向顺时针方向旋转的情况下,利用螺旋扭簧62的弹力来吸收驱动齿轮33的旋转能量,并能够禁止使卡合突起49(从动杆48)进一步向顺时针方向跟着转动。
由此,能够防止如下情况,即,定位板5因从动杆48的跟着转动而进一步向逆时针方向摆动,导致在用于对嵌合在该定位板5的锁止保持凹部11内的辊R进行支撑的定位弹簧SP2等的驻车装置1的构成部件上施加大的负荷。
(8)在从锁止状态向解除锁止状态转移时,辊R到达第二位置P2而切断向有刷马达M的电力供给。此时,在驱动齿轮33设置的可动凸轮60的逆时针侧的倾斜凸轮面60b与在顶壳22上设置的螺旋扭簧62的接触件63抵接。
因此,在万一有刷马达M利用惯性进行旋转而使驱动齿轮33进一步向逆时针方向旋转的情况下,利用螺旋扭簧62的弹力来吸收驱动齿轮33的旋转能量,并能够禁止卡合突起49(从动杆48)进一步向逆时针方向跟着转动。
由此,能够防止如下情况,即,定位板5因从动杆48的跟着转动而进一步向顺时针方向摆动,导致在用于对嵌合在该定位板5的锁止保持凹部11内的辊R进行支撑的定位弹簧SP2等的驻车装置1的构成部件上施加大的负荷。
此外,上述各实施方式也可以如下变更。
·为了切断向有刷马达M的电力供给,而使用旋转检测器54和ECU55检测定位板5和辊R的相对位置,也可以取而代之,例如在从动杆48上设置有接触件。并且,该接触件在辊R分别位于定位板5的外周面5a的第一位置P1、第二位置P2时,使第一以及第二限位开关分别从断开(OFF)变为接通(ON),切断向有刷马达M的电力供给也可以。
·有刷马达M的驱动电路并不限于H型电桥电路,可以使用使有刷马达M正转或反转的任意的驱动电路。另外,也可以使用取代功率MOS晶体管 而使用双极晶体管的马达驱动电路。
·定位弹簧SP2也可以取代板簧而用例如螺旋弹簧来实施。在该情况下,可以在螺旋弹簧的前端部安装辊R,辊R利用螺旋弹簧的弹力来按压定位板5的外周面5a。
·为了使驱动齿轮33转动,使用了有刷马达M,但只要是能够向正向或反向旋转的马达即可,可以使用除有刷马达M以外的任意的马达。
·也可以取代在驱动齿轮33上设置嵌合槽36,而在与驱动齿轮33一起一体旋转的例如圆板等的旋转体上形成嵌合槽,在该圆板等的旋转体的嵌合槽内嵌合从动杆48的卡合突起49。
Claims (6)
1.一种驻车装置,利用锁止杆对驻车齿轮进行锁止或解除锁止,其特征在于,具有:
旋转体,伴随马达的正转或反转来进行正转或反转;
从动杆,与所述旋转体相卡合,并伴随所述旋转体的正转或反转来进行摆动;
定位板,伴随所述从动杆向正向或反向的摆动,来向正向或反向进行摆动,有选择地将所述锁止杆引导至与所述驻车齿轮啮合的锁止位置和解除该啮合的解除锁止位置,并且,该定位板具有外周面;
第一嵌合部以及第二嵌合部,形成在所述定位板的外周面上,
嵌合构件,能够与所述定位板的外周面滑动接触并按压所述外周面,通过与所述第一嵌合部或所述第二嵌合部相嵌合,来将所述锁止杆保持在所述锁止位置或所述解除锁止位置上;
卡合构件,设置在所述从动杆上,通过与进行正转的所述旋转体相卡合来使所述从动杆进行正转,并且,通过与进行反转的所述旋转体相卡合来使所述从动杆进行反转;
切断部,在所述嵌合构件到达所述定位板上的第一位置或第二位置时,切断向所述马达的电力供给;
弹性构件,在切断向所述马达的电力供给时,按压所述嵌合构件来使所述定位板摆动,由此使所述嵌合构件与所述定位板的所述第一嵌合部或所述第二嵌合部相嵌合;
旋转能量吸收构件,在切断向所述马达的电力供给时,用于吸收所述旋转体的旋转能量。
2.如权利要求1所述的驻车装置,其特征在于,
所述旋转体包括驱动齿轮,在所述驱动齿轮的一个侧面上形成有沿周向延伸的圆弧状的嵌合槽,在所述嵌合槽内以能够沿周向移动的方式插入并贯通有所述从动杆的所述卡合构件,在所述嵌合槽的周向的两端内面分别设置有第一卡合部和第二卡合部,所述卡合构件伴随所述旋转体的正转或反转,来分别与所述第一或第二卡合部相抵接。
3.如权利要求1或2所述的驻车装置,其特征在于,
所述弹性构件包括在前端部具有所述嵌合构件的定位弹簧,所述定位弹簧利用弹力经由所述嵌合构件总是按压所述定位板的外周面,
在所述定位板沿第一摆动方向摆动到所述第一位置时,所述弹性构件利用按压力来使所述定位板沿所述第一摆动方向摆动,由此使所述嵌合构件与所述第一嵌合部相嵌合,
在所述定位板沿与第一摆动方向相反的第二摆动方向摆动到所述第二位置时,所述弹性构件利用按压力使所述定位板沿所述第二摆动方向摆动,由此使所述嵌合构件与所述第二嵌合部相嵌合。
4.如权利要求1或2所述的驻车装置,其特征在于,
设置有覆盖所述旋转体的箱体;
所述旋转能量吸收构件包括螺旋弹簧和阻挡构件,所述螺旋弹簧在两端分别具有第一卡合端以及第二卡合端,所述螺旋弹簧以及所述阻挡构件中的一个设置在所述旋转体上,所述螺旋弹簧以及所述阻挡构件中的另一个设置在箱体上,
在所述嵌合构件到达所述定位板的所述第一位置或所述第二位置时,所述阻挡构件配置在与所述螺旋弹簧的所述第一卡合端或所述第二卡合端接近的位置。
5.如权利要求4所述的驻车装置,其特征在于,
所述螺旋弹簧设置在所述旋转体上,并且伴随所述旋转体的旋转来进行旋转,所述阻挡构件设置在所述箱体上,并且配置在所述螺旋弹簧的旋转轨迹上。
6.如权利要求1或2所述的驻车装置,其特征在于,
设置有覆盖所述旋转体的箱体,
所述旋转能量吸收构件具有:
圆筒壁,设置在所述旋转体的外周上,
可动凸轮,形成在所述圆筒壁的内周面上,与所述旋转体一起进行旋转,
第一倾斜凸轮面以及第二倾斜凸轮面,形成在所述可动凸轮上,
螺旋扭簧,设置在所述箱体上,并且形成为从所述箱体的中心位置呈螺旋状向所述圆筒壁弯曲,
接触件,设置在所述螺旋扭簧的前端上;
在所述嵌合构件到达所述定位板的所述第一位置或所述第二位置时,所述螺旋扭簧的所述接触件与所述可动凸轮的所述第一倾斜凸轮面或所述第二倾斜凸轮面相抵接。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-245373 | 2010-11-01 | ||
| JP2010245373A JP5251959B2 (ja) | 2010-11-01 | 2010-11-01 | パーキングロック装置 |
| PCT/JP2011/074920 WO2012060289A1 (ja) | 2010-11-01 | 2011-10-28 | パーキングロック装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203272768U true CN203272768U (zh) | 2013-11-06 |
Family
ID=46024403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201190000718.0U Expired - Fee Related CN203272768U (zh) | 2010-11-01 | 2011-10-28 | 驻车装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8839937B2 (zh) |
| EP (1) | EP2636928B1 (zh) |
| JP (1) | JP5251959B2 (zh) |
| CN (1) | CN203272768U (zh) |
| WO (1) | WO2012060289A1 (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104534084A (zh) * | 2014-11-11 | 2015-04-22 | 奇瑞汽车股份有限公司 | 一种电动汽车减速器内的电子驻车机构 |
| CN110953340A (zh) * | 2018-09-26 | 2020-04-03 | 丰田自动车株式会社 | 用于车辆的驻车锁定装置 |
| CN112689723A (zh) * | 2018-06-13 | 2021-04-20 | 纬湃科技美国有限责任公司 | 电动驻车锁致动器受限旋转断开 |
| CN114423976A (zh) * | 2019-09-13 | 2022-04-29 | 莱纳玛公司 | 紧凑的驻车锁组件 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI458882B (zh) * | 2012-05-15 | 2014-11-01 | Wfe Technology Corp | 電子鎖之作動馬達組 |
| CN203442082U (zh) * | 2013-09-10 | 2014-02-19 | 大陆汽车电子(芜湖)有限公司 | 凸轮齿轮和包括该凸轮齿轮的直线驱动装置 |
| US10094161B2 (en) * | 2015-05-15 | 2018-10-09 | Vapensystems Inc. | Weapons storage system and locking mechanism |
| US10208858B2 (en) | 2016-04-25 | 2019-02-19 | Continental Automotive Systems, Inc. | Internal electronic park actuator |
| IT201700112581A1 (it) * | 2017-10-06 | 2019-04-06 | Magneti Marelli Spa | Attuatore elettromeccanico bimotore a doppia ridondanza attiva per l'azionamento di un componente di un veicolo |
| FR3074866B1 (fr) * | 2017-12-13 | 2020-05-29 | Foundation Brakes France Sas | Piece comprenant des dents et des nervures |
| CN109826949A (zh) * | 2019-01-22 | 2019-05-31 | 浙江合众新能源汽车有限公司 | 一种纯电动汽车基于状态管理的p挡锁控制系统及方法 |
| KR102330313B1 (ko) * | 2020-04-02 | 2021-11-24 | 주식회사 네오오토 | 차량용 파킹 장치 및 이를 포함하는 차량용 변속기 |
| US11668393B2 (en) * | 2020-04-14 | 2023-06-06 | Ford Global Technologies, Llc | Electro-mechanical actuator for automatic transmission |
| CN113511330B (zh) * | 2021-06-02 | 2023-05-26 | 黔南民族师范学院 | 一种智能地理遥感测绘用无人机飞行平台 |
| CN115264055B (zh) * | 2022-06-14 | 2023-07-14 | 东风汽车集团股份有限公司 | 一种汽车p挡应急解锁机构 |
| DE102022207254A1 (de) * | 2022-07-15 | 2024-01-18 | Vitesco Technologies GmbH | Sperrvorrichtung, Elektromotor-Antriebseinheit und Fahrzeug |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19837832A1 (de) * | 1998-08-20 | 2000-02-24 | Zahnradfabrik Friedrichshafen | Parksperre für automatische Getriebe von Kraftfahrzeugen |
| JP3996949B2 (ja) * | 2001-05-29 | 2007-10-24 | ジヤトコ株式会社 | シフトバイワイヤシステム |
| JP2003130212A (ja) * | 2001-10-24 | 2003-05-08 | Aisin Aw Co Ltd | レンジ切り替え装置 |
| JP2003185013A (ja) * | 2001-12-12 | 2003-07-03 | Hitachi Unisia Automotive Ltd | 車両用変速制御装置 |
| JP2008002508A (ja) | 2006-06-20 | 2008-01-10 | Toyota Motor Corp | パーキングロックの解除装置およびそれを備えた動力伝達装置 |
| JP4361927B2 (ja) | 2006-08-08 | 2009-11-11 | 株式会社デンソー | シフトバイワイヤシステム |
| JP4946722B2 (ja) * | 2007-08-20 | 2012-06-06 | トヨタ自動車株式会社 | 状態切替要素の駆動装置、自動変速機のレンジ切替装置、ならびにパーキング装置 |
| JP2009162346A (ja) * | 2008-01-09 | 2009-07-23 | Toyota Motor Corp | ディテント機構および自動変速機 |
| JP5240265B2 (ja) * | 2010-09-22 | 2013-07-17 | アイシン精機株式会社 | 動力伝達装置 |
-
2010
- 2010-11-01 JP JP2010245373A patent/JP5251959B2/ja not_active Expired - Fee Related
-
2011
- 2011-10-28 US US13/820,953 patent/US8839937B2/en not_active Expired - Fee Related
- 2011-10-28 EP EP11837939.5A patent/EP2636928B1/en not_active Not-in-force
- 2011-10-28 WO PCT/JP2011/074920 patent/WO2012060289A1/ja active Application Filing
- 2011-10-28 CN CN201190000718.0U patent/CN203272768U/zh not_active Expired - Fee Related
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104534084A (zh) * | 2014-11-11 | 2015-04-22 | 奇瑞汽车股份有限公司 | 一种电动汽车减速器内的电子驻车机构 |
| CN104534084B (zh) * | 2014-11-11 | 2017-03-15 | 奇瑞新能源汽车技术有限公司 | 一种电动汽车减速器内的电子驻车机构 |
| CN112689723A (zh) * | 2018-06-13 | 2021-04-20 | 纬湃科技美国有限责任公司 | 电动驻车锁致动器受限旋转断开 |
| CN110953340A (zh) * | 2018-09-26 | 2020-04-03 | 丰田自动车株式会社 | 用于车辆的驻车锁定装置 |
| CN110953340B (zh) * | 2018-09-26 | 2021-05-14 | 丰田自动车株式会社 | 用于车辆的驻车锁定装置 |
| CN114423976A (zh) * | 2019-09-13 | 2022-04-29 | 莱纳玛公司 | 紧凑的驻车锁组件 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8839937B2 (en) | 2014-09-23 |
| EP2636928B1 (en) | 2014-11-26 |
| EP2636928A1 (en) | 2013-09-11 |
| JP5251959B2 (ja) | 2013-07-31 |
| EP2636928A4 (en) | 2013-09-11 |
| US20130161149A1 (en) | 2013-06-27 |
| JP2012097804A (ja) | 2012-05-24 |
| WO2012060289A1 (ja) | 2012-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203272768U (zh) | 驻车装置 | |
| KR101039548B1 (ko) | 차량의 조향 제어 시스템 | |
| JP4448512B2 (ja) | 自動車のステアリングシャフトをロックする装置 | |
| CN110341784A (zh) | 转向装置 | |
| US10458536B2 (en) | Gearshift assembly for a transmission of a vehicle | |
| CN106286802B (zh) | 变速器及其换挡执行机构 | |
| CN107269834A (zh) | 电动驻车锁装置 | |
| JP2006525169A (ja) | 自動車のステアリングシャフトをロックする装置 | |
| EP1768009B1 (de) | Drehsteller | |
| CN105026244B (zh) | 用于在电动转向系统中转向角输入的限制装置 | |
| JP2005170247A (ja) | ギアシフト装置 | |
| CN208344320U (zh) | 车辆及其转向限位系统 | |
| EP1785295B1 (de) | Verstellbarer Stabilisator | |
| JP5892369B2 (ja) | 後輪操舵装置 | |
| KR101277945B1 (ko) | 자동차의 랙 스트로크 가변장치 | |
| KR100855326B1 (ko) | 차량의 조향각제어장치 | |
| US6880420B2 (en) | Automatic control device for a motorized vehicle gearbox | |
| KR101641134B1 (ko) | 차량용 래치의 초기위치 보정구조 | |
| JP2009208613A (ja) | 車両用舵角比可変操舵装置 | |
| KR100384723B1 (ko) | 전동식 동력 조향장치용 조향비 가변장치 | |
| US10124671B2 (en) | Drive switching apparatus | |
| KR101020540B1 (ko) | 랙 스트로크 가변장치 | |
| CN107521548A (zh) | 一种车辆的可移动方向盘 | |
| JP2009298257A (ja) | 車両の操舵制御装置 | |
| KR101522772B1 (ko) | 궤도차량의 조향 위치 센서 조립체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20131106 Termination date: 20201028 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |