塔式起重机回转机构的嵌入式集成驱动控制系统和方法
技术领域
本申请涉及塔式起重机控制领域,具体涉及一种塔式起重机回转机构的嵌入式集成驱动控制系统和方法。
背景技术
对于现有技术中的塔式起重机,为了防止在吊装货物时起重机的吊臂倾覆或者反转,其配重一般是越重越好,但由于塔式起重机的配重结构一般设置在起重机的一端,重量过大的配重则会导致在起吊货物重量较轻或者非工作状态时塔式起重机自身受到较大的偏转力,导致起重机一侧结构不稳定或者长期受力不平衡发生一侧机构损坏,因此,如何选择配重块即能适应起重机起吊大质量货物又可以保证起重机自身重心稳定不受到较大偏转力从而损坏起重机成为了现有技术中的难题;同时目前起重机的控制,需要接收多方面的信息并通过有线或者无线的方式发送给远方服务器,需要有线布线传送到远程控制室或者无线通信,无线通信信号容易受到干扰,而有线布线会有安全隐患或者增加运行维护负担,本专利使用嵌入式集成技术,将各种信号的收集和处理功能交给塔机本体控制室内的嵌入式集成系统即中央控制器完成,提高工作效率,避免上述问题,提高了控制效率。
发明内容
为实现上述目的,本发明采取的技术方案为:一种塔式起重机回转机构的嵌入式集成驱动控制系统,包括升降结构、回转机构、起吊机构、中央控制器、滑动座、滑轨以及远程控制终端,其特征在于:所述升降结构设置在所述回转机构下方,所述升降结构包括底部支撑部、回转式升降部以及顶部支撑部,所述回转机构包括可以相对于所述顶部支撑部旋转的转动结构,通过所述转动结构的转动可以使所述起吊机构相对于地面在水平方向上进行360度转动;所述起吊机构包括塔机平台,与所述塔机平台的一端转动连接的起重臂,以及设置在所述塔机平台上相对于所述起重臂另一端设置的固定配重部,所述塔机平台上还固定设置有配重支撑部,所述配重支撑部上转动设置有移动配重部,所述移动配重部可以相对于所述塔机平台在其垂直平面旋转;所述中央控制器设置在所述塔机平台的靠近所述起重臂的一端,所述中央控制器可以控制所述移动配重部在垂直于所述塔机平台的平面上进行360度转动,调整所述移动配重部的水平方向配重,以使所述移动配重部与所述固定配重部的配重可以满足所述起重臂运动起吊货物时所述起吊机构的重心位于所述升降结构的中心。
进一步的,所述起吊机构还包括拉升机构以及挂钩,所述挂钩为双排滑轮吊钩。
进一步的,所述远程控制终端可以与所述中央控制器通信连接,接收所述中央控制器的信息并向所述中央控制器发出指令。
进一步的,所述固定配重部突出于所述塔机平台的一端设置,并固定设置在所述塔机平台上,所述固定配重部具有与所述塔机平台的顶部一体设置的上平台以及可以相对于所述上平台拆卸固定的下平台,所述上平台与下平台之间形成可以放置配重块的配重仓。
进一步的,所述滑动座设置在所述升降结构的下方,所述滑动座包括与所述升降结构固定连接设置的底座以及设置在所述底座下方的两个支撑座,两个所述支撑座对称设置在所述底座的两端,每个所述支撑座的底部均设置有两个支撑基座。
进一步的,所述滑动座上设置有水平仪,所述水平仪与所述中央控制器通信连接,每个所述支撑基座均可以相对于所述支撑座转动,所述中央控制器可以控制所述支撑基座的旋转角度保证所述滑动座与所述水平面平行。
进一步的,每个所述支撑基座的底部均设置有两个滑轮组,每个滑轮组均包括两个滑轮,压力传感器设置在每个所述滑轮与所述滑轨接触的内外两侧,所述压力传感器与所述中央控制器通信连接。
一种塔式起重机回转机构的嵌入式集成驱动控制方法,所述控制方法适用于上述塔式起重机回转机构的嵌入式集成驱动控制系统,其特征在于包括如下步骤:
a) 所述远程控制终端远程控制所述中央控制器开机启动,所述中央控制器开机启动并向所述升降结构、回转机构、起重臂以及移动配重部的驱动器发送初步连接指令,驱动器接收到所述初步连接指令后可以将其位置信息发送至中央控制器实现信息交互;
b) 所述中央控制器向所述压力传感器的信号收发模块发送数据接收信号,所述压力传感器的收发模块将所述压力传感器的初始值发送至所述中央控制器,所述中央控制器根据所述压力传感器的初始值计算调整所述移动配重部旋转调节所述起重机的重心使其重心位于所述升降结构的中心;
c)所述中央控制器向所述水平仪的信号收发模块发送数据接收信号,所述水平仪的收发模块将其信号实时传递给所述中央控制器,所述中央控制器控制所述支撑基座转动以调节所述滑动座与所述水平面平行;
d) 通过所述远程控制终端向所述中央控制器发送指令使所述升降结构升降调整起重机高度,调整所述回转机构的回转角度以及所述起重臂的转动角度,调整起重机的吊钩位置使其将货物起吊,所述回转机构以及所述起重臂的驱动设备将其驱动信息反馈至所述中央控制器,所述中央控制器将反馈的所述驱动信息发送至远程控制终端;
e)每个所述压力传感器均定时向所述中央控制器发送数据信号,所述中央控制器监控压力传感器的数据,当左右两侧滑轨的压力传感器数值之差超过阈值时,所述中央控制器控制所述移动配重部旋转调节所述起重机的重心使起重机在使用过程中始终保持稳定。
进一步的,所述远程控制终端通过有线或者无线的方式与所述中央控制器通信连接。
进一步的,所述远程控制终端通过无线的方式与所述中央控制器通信连接,所述远程控制终端可以为移动式终端。
有益效果
(1)本发明使用可以调节起重机重心的移动配重部以及压力传感器配合实现起重机重心调整;同时目前起重机的控制,是通过联动台发送的控制电机设备回转的速度信息和转向信息,以及接收电机反馈装置发送的电机设备的当前速度信息和转向信息,根据这两者是否一致的情况向涡流控制设备和电机设备发送涡流调整和转向调整,通过变频器实现涡流自控制,以上控制方法需要接收多方面的信息并通过有线或者无线的方式发送给远方服务器,需要有线布线传送到远程控制室或者无线通信,无线通信信号容易受到干扰,而有线布线会有安全隐患或者增加运行维护负担,本专利使用嵌入式集成技术,将各种信号的收集和处理功能交给塔机本体控制室内的嵌入式集成系统即中央控制器完成,提高工作效率,避免上述问题,提高了控制效率。
(2)本发明塔式起重机的旋转式升降相对于现有技术中使用液压等机构直接驱动升降而言,通过调节旋转角度实现升降高度的控制,将直线距离转变为圆周距离使调整距离加大从而通过旋转角度控制升降提高了升降精度,而且不会由于液压等机构的故障导致塔式起重机在升降过程中坍塌,同时在回转式升降部内部设置液压支撑结构保证支撑结构的稳定性。
附图说明
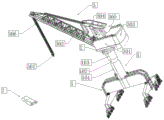
图1为本发明塔式起重机回转机构的嵌入式集成驱动控制系统整体结构示意图;
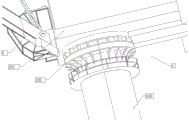
图2为本发明塔式起重机回转机构的嵌入式集成驱动控制系统局部结构示意图一;
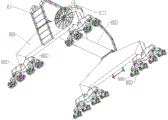
图3为本发明塔式起重机回转机构的嵌入式集成驱动控制系统局部结构示意图二;
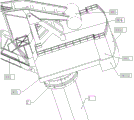
图4为本发明塔式起重机回转机构的嵌入式集成驱动控制系统局部结构示意图三;
图5为本发明塔式起重机回转机构的嵌入式集成驱动控制系统局部结构示意图四;
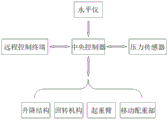
图6为为本发明塔式起重机回转机构的嵌入式集成驱动控制系统控制流程图。
具体实施方式
下面将结合本发明实施例,对本发明实施例中的技术方案进行 清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例, 而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在 没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保 护的范围。
如图1-6,一种塔式起重机回转机构的嵌入式集成驱动控制系统,包括升降结构1、回转机构2、起吊机构3、中央控制器4、滑动座5、滑轨以及远程控制终端7,其特征在于:所述升降结构1设置在所述回转机构2下方,所述升降结构1包括底部支撑部101、回转式升降部102以及顶部支撑部103,所述回转机构2包括可以相对于所述顶部支撑部103旋转的转动结构201,通过所述转动结构201的转动可以使所述起吊机构3相对于地面在水平方向上进行360度转动;所述起吊机构3包括塔机平台301,与所述塔机平台301的一端转动连接的起重臂302,以及设置在所述塔机平台301上相对于所述起重臂302另一端设置的固定配重部303,所述塔机平台301上还固定设置有配重支撑部304,所述配重支撑部304上转动设置有移动配重部305,所述移动配重部305可以相对于所述塔机平台301在其垂直平面旋转;所述中央控制器4设置在所述塔机平台301的靠近所述起重臂302的一端,所述中央控制器4可以控制所述移动配重部305在垂直于所述塔机平台301的平面上进行360度转动,调整所述移动配重部305的水平方向配重,以使所述移动配重部305与所述固定配重部303的配重可以满足所述起重臂302运动起吊货物时所述起吊机构3的重心位于所述升降结构1的中心。本申请中当所述起重臂302与水平面的夹角发生变化时,由于起重臂302的一端设置有吊钩以及货物,此时起吊机构3的整体重心即会发生变化,此时移动配重部305相对于所述塔机平台301的旋转可以调整其水平方向上的配重质量,保证起重臂302运动起吊货物时所述起吊机构3的重心位于所述升降结构1的中心,本申请通过固定配重部303与移动配重部305的设置保证了在塔式起重机在变幅机构运行过程中重心保持稳定。
进一步的,所述起吊机构3还包括拉升机构306以及挂钩307,所述挂钩307为双排滑轮吊钩。
进一步的,所述回转式升降部102可以相对于所述底部支撑部101以及所述顶部支撑部103旋转以使所述顶部支撑部103远离或靠近所述底部支撑部101;优选的,所述底部支撑部101与所述顶部支撑部103为半径相同的筒状结构,所述回转式升降部102为筒状结构,所述回转式升降部102的半径小于所述底部支撑部101与所述顶部支撑部103的半径,所述回转式升降部102的外壁上下两端分别设置有方向相反的螺纹结构,以使所述回转式升降部102旋转时所述顶部支撑部103远离或靠近所述底部支撑部101。
进一步优选的,在所述回转式升降部102内还设置有伸缩式液压支撑结构,所述伸缩式液压支撑结构可以支撑所述底部支撑部101以及所述顶部支撑部103的端面;本申请通过设置了可以相对于所述底部支撑部101以及所述顶部支撑部103旋转的回转式升降部102,可以在不改变起吊机构3与底部支撑部101角度的情况下仅通过回转式升降部102的旋转实现塔式起重机的升降,且塔式起重机的旋转式升降相对于现有技术中使用液压等机构直接驱动升降而言,通过调节旋转角度实现升降高度的控制,将直线距离转变为圆周距离使调整距离加大从而通过旋转角度控制升降提高了升降精度,而且不会由于液压等机构的故障导致塔式起重机在升降过程中坍塌,同时在回转式升降部102内部设置液压支撑结构保证支撑结构的稳定性。
优选的,所述远程控制终端7可以与所述中央控制器4通信连接,接收所述中央控制器4的信息并向所述中央控制器4发出指令。
优选的,所述固定配重部303突出于所述塔机平台301的一端设置,并固定设置在所述塔机平台301上,所述固定配重部303具有与所述塔机平台301的顶部一体设置的上平台3031以及可以相对于所述上平台3031拆卸固定的下平台3032,所述上平台3031与下平台3032之间形成可以放置配重块的配重仓。
进一步的,所述滑动座5设置在所述升降结构1的下方,所述滑动座5包括与所述升降结构1固定连接设置的底座501以及设置在所述底座501下方的两个支撑座502,两个所述支撑座502对称设置在所述底座501的两端,每个所述支撑座502的底部均设置有两个支撑基座503。
优选的,所述滑动座5上设置有水平仪510,所述水平仪510与所述中央控制器4通信连接,每个所述支撑基座503均可以相对于所述支撑座502转动,所述中央控制器4可以控制所述支撑基座503的旋转角度保证所述滑动座5与所述水平面平行,通过所述支撑基座503的转动可以调节塔式起重机的滑动座5的水平度,当滑轨相对于水平面具有较小的倾斜角时,所述支撑基座503的转动可以保证所述滑动座5保持水平,提高起重机的稳定性。
优选的,每个所述支撑基座503的底部均设置有两个滑轮组504,每个滑轮组504均包括两个滑轮505,压力传感器506设置在每个所述滑轮505与所述滑轨接触的内外两侧,所述压力传感器506与所述中央控制器4通信连接。通过在滑轮505与滑轨接触的内外两侧设置压力传感器506,可以使中央控制器4实时监控所述起重机的偏压数据,当左右两侧滑轨的压力传感器506数值发生偏差时,所述中央控制器4可以控制所述移动配重部305旋转来调节所述起重机的重心。
一种塔式起重机回转机构的嵌入式集成驱动控制方法,其特征在于包括如下步骤:
a) 所述远程控制终端7远程控制所述中央控制器4开机启动,所述中央控制器4开机启动并向所述升降结构1、回转机构2、起重臂302以及移动配重部305的驱动器发送初步连接指令,驱动器接收到所述初步连接指令后可以将其位置信息发送至中央控制器4实现信息交互;
b) 所述中央控制器4向所述压力传感器506的信号收发模块发送数据接收信号,所述压力传感器506的收发模块将所述压力传感器506的初始值发送至所述中央控制器4,所述中央控制器4根据所述压力传感器506的初始值计算调整所述移动配重部305旋转调节所述起重机的重心使其重心位于所述升降结构1的中心;
c)所述中央控制器4向所述水平仪的信号收发模块发送数据接收信号,所述水平仪的收发模块将其信号实时传递给所述中央控制器4,所述中央控制器4控制所述支撑基座503转动以调节所述滑动座5与所述水平面平行;
d) 通过所述远程控制终端7向所述中央控制器4发送指令使所述升降结构1升降调整起重机高度,调整所述回转机构2的回转角度以及所述起重臂302的转动角度,调整起重机的吊钩位置使其将货物起吊,所述回转机构2以及所述起重臂302的驱动设备将其驱动信息反馈至所述中央控制器4,所述中央控制器4将反馈的所述驱动信息发送至远程控制终端7;
e)每个所述压力传感器506均定时向所述中央控制器4发送数据信号,所述中央控制器4监控压力传感器506的数据,当左右两侧滑轨的压力传感器506数值之差超过阈值时,所述中央控制器4控制所述移动配重部305旋转调节所述起重机的重心使起重机在使用过程中始终保持稳定。
进一步的,所述远程控制终端7通过有线或者无线的方式与所述中央控制器4通信连接。
优选的,所述远程控制终端7通过无线的方式与所述中央控制器4通信连接,所述远程控制终端7可以为移动式终端。
现有技术中为了防止起重机重心不稳导致脱轨,滑动式塔式起重机的底座均套设在滑轨上,通过底座均套设在滑轨限制起重机的倾覆,而本发明使用可以调节起重机重心的移动配重部305以及压力传感器506配合实现起重机重心调整;同时目前起重机的控制,是通过联动台发送的控制电机设备回转的速度信息和转向信息,以及接收电机反馈装置发送的电机设备的当前速度信息和转向信息,根据这两者是否一致的情况向涡流控制设备和电机设备发送涡流调整和转向调整,通过变频器实现涡流自控制,以上控制方法需要接收多方面的信息并通过有线或者无线的方式发送给远方服务器,需要有线布线传送到远程控制室或者无线通信,无线通信信号容易受到干扰,而有线布线会有安全隐患或者增加运行维护负担,本专利使用嵌入式集成技术,将各种信号的收集和处理功能交给塔机本体控制室内的嵌入式集成系统即中央控制器完成,提高工作效率,避免上述问题,提高了控制效率;塔式起重机的旋转式升降相对于现有技术中使用液压等机构直接驱动升降而言,通过调节旋转角度实现升降高度的控制,将直线距离转变为圆周距离使调整距离加大从而通过旋转角度控制升降提高了升降精度,而且不会由于液压等机构的故障导致塔式起重机在升降过程中坍塌,同时在回转式升降部102内部设置液压支撑结构保证支撑结构的稳定性。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。