CN1125919C - 发动机起动装置 - Google Patents
发动机起动装置 Download PDFInfo
- Publication number
- CN1125919C CN1125919C CN00104838.4A CN00104838A CN1125919C CN 1125919 C CN1125919 C CN 1125919C CN 00104838 A CN00104838 A CN 00104838A CN 1125919 C CN1125919 C CN 1125919C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- reverse
- zone
- motor
- situation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000002441 reversible effect Effects 0.000 claims abstract description 88
- 238000001514 detection method Methods 0.000 claims description 42
- 230000008859 change Effects 0.000 claims description 19
- 230000007246 mechanism Effects 0.000 claims description 18
- 239000007858 starting material Substances 0.000 abstract description 38
- 230000009471 action Effects 0.000 description 40
- 238000012360 testing method Methods 0.000 description 13
- 230000006835 compression Effects 0.000 description 12
- 238000007906 compression Methods 0.000 description 12
- 238000007600 charging Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 239000003921 oil Substances 0.000 description 7
- 238000000034 method Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 5
- 239000000314 lubricant Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical group [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 239000010687 lubricating oil Substances 0.000 description 2
- 238000005461 lubrication Methods 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 239000006200 vaporizer Substances 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000002057 chronotropic effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 150000002148 esters Chemical class 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 238000009432 framing Methods 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 230000001050 lubricating effect Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 208000004141 microcephaly Diseases 0.000 description 1
- 230000008450 motivation Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 229910001172 neodymium magnet Inorganic materials 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- GOLXNESZZPUPJE-UHFFFAOYSA-N spiromesifen Chemical compound CC1=CC(C)=CC(C)=C1C(C(O1)=O)=C(OC(=O)CC(C)(C)C)C11CCCC1 GOLXNESZZPUPJE-UHFFFAOYSA-N 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000017105 transposition Effects 0.000 description 1
- 239000002912 waste gas Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
- F02N19/005—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits or control means specially adapted for starting of engines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
- F02N19/005—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation
- F02N2019/007—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation using inertial reverse rotation
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Means For Warming Up And Starting Carburetors (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
一种发动机起动装置,凸轮传感器155由凸轮轴69的位置检测出曲柄的角度,判别出曲柄的角度位置是处于起动时负荷小的正转区域还是处于该负荷大的逆转区域。在处于逆转区域的情况下,在驾驶者发出启动操作之前,让起动电机171逆转,将曲柄角度位置变更到正转区域。由此,能够迅速响应启动操作使车辆启动。特别是考虑到逆转时的惯性控制曲柄轴停止在正确的正转区域。采用本发明,可以减小发动机起动时的负荷,提高起动性能。
Description
技术领域
本发明涉及一种发动机起动装置,特别是一种在起动时负荷力矩的影响小、适于提高起动性能的发动机起动装置。
背景技术
从照顾环境和节省能源的观点来看,特别是为了抑制怠速时的废气或者燃料的耗费,在车辆停止时让发动机自动停止,而在从停止状态操作节气门手柄而指示起动时,让发动机自动地再次起动,从而使车辆起动,这种发动机停止启动控制装置是公知的(日本专利特开昭6-75323号公报)。
另一方面,为了使起动时的负荷力矩影响小,在让起动电机(起动马达)朝负荷力矩减小的方向旋转后,马上让起动马达朝正规的发动机旋转方向(正转方向)旋转,这种发动机起动装置也是公知的(日本专利特开平7-71350号公报)。
在控制起动马达的旋转方向以提高起动性的上述发动机起动装置中,由于是让曲柄轴从逆转马上变为正转,因此与通常的起动方法不同,从逆转的部分直到起动的时间有剩余。特别是,在车辆停止时自动停止发动机的上述发动机起动停止控制装置中,人们希望对应于节气门手柄的操作迅速地起动发动机,从而使车辆起动。然而,在以往的起动装置中不能够有效地对应于这种希望。
本发明的第一目的是解决上述以往技术中的问题,提供一种不受起动时负荷力矩的影响,同时能够缩短起动的时间的发动机起动装置。
在让曲柄轴从逆转很快变为正转、而控制起动电机旋转方向来提高起动性的上述起动装置中,会存在以下问题。即,在曲柄轴一旦逆转之后在停止的状态下,由于逆转时的惯性,难以将曲柄轴停止在所希望的位置。因此,尽管让曲柄轴逆转,也不能够使起动时负荷力矩的影响变小。
本发明的第二目的是解决上述以往技术中的问题,提供一种不仅能够缩短起动的时间,而且在具备让曲柄轴逆转再起动的情况下能够使逆转后的停止位置处于所希望的位置,从而没有负荷力矩的影响的发动机起动装置。
发明内容
为了实现上述第一目的,本发明的发动机起动装置,其第1特征在于,在发动机起动操作时,在曲柄角度位置处于正转区域的情况下,让起动电机正转,而另一方面,在曲柄角度位置处于逆转区域的情况下,让起动电机逆转直到曲柄角度位置进入到上述正转区域,然后再正转,在这样的发动机起动装置中,具有:如果使车辆停止,则发动机自动停止的空转限制模式、和在车辆的停止状态下,若操作加速踏板,发动机自动地再启动,使车辆的前进成为可能的停止前进模式,以及在上述车辆停止时曲柄角度位置处于上述逆转区域的情况下、在进行上述起动操作之前使曲柄角度位置变为上述正转区域的起动电机控制机构。
根据该第1特征,在随着车辆的停止而停止发动机时,曲柄角度位置处于逆转区域的情况下,在起动操作之前能够将曲柄的角度位置进行变更,而移动到正转区域。由此,能够立即响应起动操作而使起动马达正转,从而使发动机起动。
另外,本发明的第2特征在于,它具有检测出凸轮轴位置的凸轮传感器,根据向上述凸轮传感器的输出信号而检测出上述正转区域以及上述逆转区域。根据该第2特征,通过凸轮轴的位置能够很容易地识别出曲柄角度的位置是处于正转区域还是处于逆转区域。
为了实现上述第二目的,本发明的发动机起动装置,其第3特征在于,在发动机起动操作时,在曲柄角度位置处于正转区域的情况下,让起动电机正转,另一方面,在曲柄角度位置处于逆转区域的情况下,让起动电机逆转,从而使曲柄角度位置进入到上述正转区域之后再正转,在这样的发动机起动装置中,在从上述逆转区域逆转时、在进入上述正转区域之前的预定位置检测出曲柄轴的旋转速度的速度检测机构,以及根据上述旋转速度来控制上述起动电机逆转时的停止时刻的控制机构。
另外,本发明的第4特征在于,上述旋转速度是通过从上述起动电机逆转开始直到上述预定位置的到达时间来检测出的。
另外,本发明的第5特征在于,形成这样的结构,即上述控制机构在上述旋转速度超过预定值的情况下,停止启动电机的逆转,而在上述旋转速度没有到达预定值的情况下,再经过预定的时间之后停止启动电机的逆转。
此外,本发明的第6特征在于,上述预定位置是在逆转方向马上就要进入上述正转区域之前输出的预定的曲柄脉冲(クランクパルス)检测位置,在该曲柄脉冲被检测之前,曲柄角度位置进入到正转区域的情况下,停止启动电机的逆转。
按照上述第3至第6特征,可以根据起动电机逆转中曲柄轴的旋转速度来推定随着惯性旋转的停止位置误差。而考虑到这种误差,能够控制曲柄的角度位置处于正转区域的所希望的位置。
特别是,根据第5特征,在正转区域之前具有一定的旋转速度的情况下,一旦判定出有很大的惯性旋转,便直接将起动电机停止,在旋转速度很低的情况下,惯性旋转中判定出曲柄角度位置没有到达正转区域的话,再让起动电机逆转一定的时间,从而能够在所希望的位置上停止曲柄。
另外,在第6特征中,即使在逆转开始位置极为接近正转区域的情况下,在预定曲柄脉冲检测出来之前,已检测出正转区域的情况下,能够直接检测出正转区域来停止启动电机的逆转。
附图说明
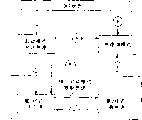
图1是本发明一个实施例的起动装置主要部分的功能框图;
图2是搭载有适于本发明的发动机起动装置的小型两轮摩托车整体侧视图;
图3是小型两轮摩托车仪表盘的平面图;
图4是表示落座检测装置概要的模式图;
图5是沿图2中所示发动机的A-A线的剖视图;
图6是发动机汽缸盖周边的侧视剖视图;
图7是发动机汽缸盖周边的正视剖视图;
图8是发动机汽缸盖周边的后视剖视图;
图9是自动变速装置驱动一侧的剖视图;
图10是自动变速装置从动一侧的剖视图;
图11是表示润滑油循环装置的剖视图;
图12是表示曲柄传感器的配置的侧视剖视图;
图13是表示曲柄传感器的配置的正视剖视图;
图14是表示本实施例的一个实施状态下起动停止控制系统整体结构的方框图;
图15是表示主控制装置功能的框图(之一);
图16是表示主控制装置功能的框图(之二);
图17是表示主控制装置主要动作的一览表;
图18是表示动作模式及动作曲线的切换条件的视图;
图19是表示曲柄角度位置与超越力矩的关系的视图;
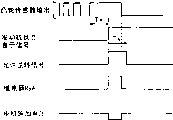
图20是曲柄角度位置控制的正时曲线图;
图21是曲柄角度位置控制的正时曲线图;
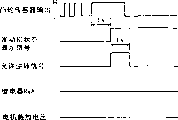
图22是曲柄角度位置控制的动作说明图;
图23是起动控制的流程图;
图24是发动机停止控制的流程图。
图中:2是车体前部,3是车体后部,8是座位,8a是框架,9是行李箱,12是曲柄轴,69是凸轮轴,72a是磁阻器,162是起动继电器(继电器RyA),162a是逆转继电器(继电器RyB),155是凸轮传感器,171是起动电机,254是落座开关,258是起动开关,259是停止开关。
具体实施方式
下面参照附图详细说明本发明。图2是搭载有本发明的实施例的发动机起动装置的两轮摩托车的整体侧视图。在该图中,车体前部2和车体后部3通过低的底板部4连接起来,构成车体骨架的车体框架主要由下管6和主管7构成。燃料箱以及行李箱(两者在图中均未示出)由主管7支撑,在其上方配置着座位8。座位8可以兼任设置于其下部的行李箱盖,为了开闭行李箱9,可以通过设置于其前部FR上的图中未示的合页机构可旋转地支撑。
另一方面,在车体前部2中的下管6上设置着转向头5,通过该转向头5由轴支撑着前叉12A。在从前叉12A向上方延伸的部分上安装着手柄11A,另外,在向下方延伸的部分的前端上用轴支撑着前轮13A。在手柄11A的上部覆盖着兼作仪表板的手柄罩33。
在主管7的中间可自由转动地由轴支撑着连接部件(悬挂装置)37,通过该悬挂装置37将摆动装置17可相对于主管7自由摆动机连接而成。摆动装置17上,在该前部搭载着单气缸四冲程发动机200。从发动机200朝后方构成皮带式无极变速机35,在该无极变速机35上通过后述的离心离合器机构连接着减速机构38。而且,在减速机构38上由轴支撑着后轮21。在减速机构38的上端与主管7上部的弯曲部之间安装着减振器22。在摆动装置17的前部连接着从发动机200的气缸盖32延伸出来的进气管23,而在进气管23上设置着汽化器24及连接在该汽化器24上的空气滤清器25。
在从皮带式无极变速机35的传动箱罩36上突出的脚蹬起动轴27上固定着脚蹬起动臂28的根部,在脚蹬起动臂28的前端设置着脚蹬起动踏板29。在设置于摆动装置箱体31下部的枢轴18上枢装着主支撑26,在停车时将该主支撑26立起(图中以双点划线表示)。
图3是上述两轮摩托车仪表板的平面图,在手柄罩33的仪表板192内设置着与速度表193在一起的待机指示器256以及电池指示器276。待机指示器256如后面详细描述的那样,在发动机停止启动控制中的发动机停止时熄灭,在如果节气门开启而立即起动发动机,从而将车辆启动处于状态来警告驾驶者。电池指示器276在电波电压降低时点亮,警告驾驶者电池充电不足。
在手柄罩33上设置有允许怠速或者限制怠速用的怠速开关253以及启动起动电机(起动马达)用的起动开关258。在手柄11的右端部上设置有节气门把手194以及刹车杆195。另外,在左右节气门把手194的根部等上带有与以往的两轮摩托车相同的喇叭开关或信号开关,在此省略图示。
下面对开闭座位8用的合页部和配置在该合页部附近的落座开关的结构进行说明。图4是表示开闭座位8用的合页部结构的模式图。在图中,兼作行李箱9的盖的座位8相对于该行李箱9在箭头A方向可自由开闭地设置。为了能够开闭座位8,在行李箱9上设置有合页轴102以及以合页轴102为中心自由摆动的连接部件100。另一方面,连接部件100的另一端,即与同合页轴102相结合的一侧相反的一侧的端部相对于座位8的框架8a上所设的第2合页轴110可自由转动地结合。因此,座位8可以以合页轴102为中心在箭头A方向摆动,同时可以以第2合页轴110为中心在箭头B方向摆动。
在连接部件100与上述框架8a之间安装有弹簧103,将座位8以第2合页轴110为中心朝图中顺时针方向施压。而在连接部件100与上述框架8a之间设置有落座开关156,驾驶者落座,框架8a以第2合页轴110方中心沿图中逆时针方向转动一定量时,动作为ON,从而检测出落座状态。
接着,对上述发动机200进行详细说明。图5是连接在发动机曲轴上的起动兼发电装置的剖视图,是图2是沿A-A位置的剖视图。在图5中,在带有保持于上述主管7上的罩37的摆动装置罩31上设置有可自由旋转地支撑在主轴承10、11上的曲柄轴12,在该曲柄轴12上通过曲柄轴销13连接着连杆14。从曲柄室9伸出的曲柄轴12的一端部上设置着起动兼发电装置的内转子15。
内转子15带有转子轮壳16以及嵌合在该转子轮壳16外周面上的永磁铁19。永磁铁19例如是钕铁硼系的,以曲柄轴12为中心等角度间隔设置6个。转子轮壳16其中心部嵌合在曲柄轴12的前端圆锥部上。转子轮壳16的一端(与曲柄轴12相反一侧的端部)上配置着法兰部件39,转子轮壳16与法兰部件39一起由螺栓20固定在曲柄轴12上。
在转子轮壳16上形成有突出于上述法兰部件39一侧的小直径圆筒部40,在圆筒部40的外周上可相对于该圆筒部40自由滑动地设置有电刷保持器41。电刷保持器41由压缩螺旋弹簧42朝上述法兰部件39方向施压。在电刷保持器41上设置有由压缩螺旋弹簧42施压的电刷44。转子轮壳16上贯通着与曲柄轴12的中心轴线平等延伸的连接销45,其一端固定在上述电刷保持器41上,同时,另一端连接在调节器(详细的在后面描述)的板46上。
内转子15的外周上配置的外定子47的定子铁芯48由螺栓49固定在摆动装置的壳体31上。在该定子铁芯49的轭铁49a上卷绕着发电线圈50和起动线圈51,从定子铁芯49延伸出来的圆筒部49b盖住上述电刷保持器41。在圆筒部49b的端部连接着整流子保持器52,在该整流子保持器52上以与上述电刷44滑动的方式固定着整流子片53。即,在与由上述压缩螺旋弹簧43施压的电刷44相对的位置上配置整流子片53。
此外,图5中仅示出了一个电刷44,不仅这一个电刷,在内转子15的旋转方向上当然可以按照需要设置多个。电刷以及整流子片的个数或者形状的一个例子以记载在本申请人的在先申请(日本专利特开平9-215292号)的说明书中。另外,在通过后述的整流器使电刷保持器41偏向曲柄轴12一侧时,电刷44从整流子片53上离开,而将电刷44的行程限制在预定量。为了限制行程,在电刷保持器41与电刷44之间设置有图中未示的止挡机构。
上述转子轮壳16的端部,即与曲柄轴12嵌合部分的一侧设置有在起动电机与发电机之间自动切换的控制器54。控制器54带有上述板46和作为将该板46向曲柄轴12的中心轴线方向偏斜用的调整平衡重的滚子55。滚子55最好是在金属制的芯子上设置树脂罩的那种,或者是不带树脂罩的那种,也可以是整体由树脂成形。转子轮壳16上形成有收容上述滚子55的袋部56,该袋部56如图所示在外定子47一侧变窄,形成锥状断面。
在上述法兰部件39上安装着散热片57,与该散热片57相对设置有散热器58。另外,在曲柄轴12上于内转子15及主轴承11之间固定着链轮59,在该链轮59上卷绕着获得来自曲柄轴12的驱动凸轮轴(参照图6)用的动力的链条60。此外,链轮59与将动力传递到循环润滑油的泵用的齿轮61形成一体,齿轮61将动力传递到固定在后述齿轮泵的驱动轴上的齿轮上。
在上述结构中,按下起动开关,通过电池(图中未示)将电压施压到整流子片53上,电流就会通过电刷44流到起动线圈51上,使内转子15旋转。其结果是,与内转子15相结合的曲柄轴12旋转,从而起动发动机200。发动机200的旋转速度增大,调节平衡重55就会受到离心力,在链轮56内向转子轮壳16的外周方向移动,到达图中双点划线所示的位置。
调节平衡重55移动后,就会使板46以及与板46相配合的连接销45偏斜到点划线所示的位置。由于该连接销45的另一端与电刷保持器41相配合,因而同样也会使电刷保持器41偏斜。电刷44的行程由于受上述的限制,在电刷保持器41有比该行程还大的偏斜时,便会断开电刷44与整流子片53的接触。在电刷44从整流子片53上离开后,由发动机驱动使曲柄轴12旋转,其结果是由发电线圈51发出电流,将电流供向电池。
接着,对发动机200的缸盖周边结构进行说明。图6是发动机的缸盖周边的侧视剖视图,图7是其正视剖视图,图8是其后视剖视图。配置在气缸62内的活塞63通过活塞销连接在连杆14的小头一侧。在气缸盖32上螺纹结合着火花塞65,其电极部形成于活塞63的头部与气缸盖32之间,面对着燃烧室。气缸62的周围围绕着冷却水套66。
气缸盖32内上述气缸62的上方设置有通过轴承67、68自由旋转支撑的凸轮轴69。在凸轮轴69上嵌合着附件70,在该附件70上由螺栓71一起固定着与凸轮链轮72和将凸轮链轮72和凸轮传感器155相关联的产生凸轮脉冲用的磁阻部72a。在凸轮链轮72上卷绕着链条60。通过该链条60将上述链轮59(参照图5),即曲柄轴12的旋转传递到凸轮轴69上。
在凸轮69的上部设置有摇臂73,该摇臂73随着凸轮轴69的旋转而对应于凸轮轴69的凸轮形状而摆动。凸轮轴69的凸轮形状以与四冲程发动机的预定行程相对应来开闭进气阀95及排气阀96的方式确定。通过进气阀95来开闭进气管23,通过排气阀96来开闭排气管97。
在凸轮轴69上形成有一体的排气凸轮及进气凸轮,与这些凸轮相邻接,设置有相对于凸轮轴69在逆转方向相配合的减压凸轮(图中未示)。减压凸轮(图中未示)在凸轮轴69逆转时追随凸轮轴69的旋转而转动到比排气凸轮的外周形状更为突出的位置。
这样,在凸轮轴69正转时能够让排气阀96处于稍微抬起的状态,从而能够减轻发动机压缩过程中的负荷。由此,由于可以让曲柄轴开始工作时的力矩较小,从而能够使用小型的四冲程发动机起动器,其结果是,具有可使曲柄周围紧凑、能够使倾角变大的优点。此外,通过过一会让凸轮正转,让减压凸轮的外形返回到排气凸轮外周形状之内。
在气缸盖32上形成有由水泵座74和水泵壳体75所围绕的泵室76。在泵室76内配置着带有叶轮77的水泵轴78。泵轴78嵌合在凸轮轴69的端部,通过轴承79可自由旋转地保持。泵轴78的驱动力由与凸轮链轮72中心部相配合的销钉80来获得。
气缸盖罩81上设置有空气簧片阀94。该空气簧片阀94有排气管97中产生负压时吸入空气来改善排放。此外,在泵室76的周边的多处设置有密封部件,在此省略了每处的说明。
接着对改变发动机200的转速、而将其传递到后轮的自动变速器进行说明。图9、图10是发动机自动变速器部分的剖视图,它们分别是图9为驱动一侧,图10为从动一侧。在图9中,在曲柄轴12上与设置上述起动兼发电装置的内转子15一侧相反侧的端部上设置有卷绕着V形皮带82用的皮带轮83。皮带轮83由在相对于曲柄轴12的旋转方向以及轴线方向固定动作的固定皮带轮片83a和相对于曲柄轴12在轴线方向自由滑动的可动皮带轮片83b构成,在可动皮带轮片83b的背面,即与V形皮带82不接触的面上安装着保持板84。保持板84以相对于曲柄轴12限制旋转方向及轴线方向两方的动作的方式一体旋转。由保持板84和可动皮带轮片83b围住的空间形成收容作为调节平衡重的滚子85用的袋部。
另一方面,将动力传递到后轮21上的离合器机构是这样构成的。在图10中,离合器的主轴125由嵌合在箱体126上的轴承127以及嵌合在齿轮箱128上的轴承129支撑。在该主轴125上通过轴承130及131支撑着皮带轮132的固定皮带轮片132a,在主轴125的端部由螺母133固定着帽状离合器板134。
在上述固定皮带轮片132a的套管135上,沿主轴125的纵向可自由滑动地设置着皮带轮132的可动皮带轮片132b。可动皮带轮片132b以能够绕着主轴125一体旋转的方式与盘136相配合。盘136与可动皮带轮片132b之间设置着将两者之间的距离朝扩张的方向作用反弹力的压缩螺旋弹簧137。另外,在盘136上设置有由销138可自由摆动地支撑的滑靴139。滑靴139在盘136的旋转速度增大时受离心力的作用向外周方向摆动,与离合器板134的内周相接触。此外,盘136在到达预定的旋转速度时,滑靴139以与离合器板134相接触的方式设置有弹簧140。
在主轴125上固定着小齿轮141,该小齿轮141与固定在空转轴142上的齿轮143相啮合。而且,固定在空转轴142上的小齿轮144与输出轴145的齿轮146相啮合。后轮21由轮圈21a和嵌入轮圈21a周围的轮胎21b构成,轮圈21a固定在上述输出轴145上。
上述结构中,在发动机转速是怠速时的情况下,滚子85处于图9的实线所示的位置,V型皮带82卷绕在皮带轮83的最小直径部分。皮带轮132的可动皮带片132b在压缩螺旋弹簧137的压力下偏倚图10的实线位置,V型皮带8卷绕在皮带轮132的最大直径部分。在这种状态下,离心离合器的主轴125由于以怠速转速旋转,施加在盘136上的离心力小,滑靴139被弹簧140接到内侧,因此,不与离合器板134相接触,即,发动机的旋转不能传递到主轴125上,这样车轮21不旋转。
之后,一旦发动机转速上升,施加到盘136上的离心力增大,滑靴139克服弹簧140的弹力向外方伸出,与离合器板134相接触。其结果是,发动机的旋转传递到主轴125上,通过齿轮系将动力传递到车轮21上。
另一方面,发动机的转速再增大时,滚子85由离心力而向外周方向偏移。图9的双点划线所示的位置就是这种情况下滚子85的位置。滚子85一旦偏倚到外周方向,可动皮带轮83b由于被压向固定皮带轮83a一侧,V型皮带82便移动到皮带轮83的最大直径。这样,在离心离合器一侧,克服螺旋压缩弹簧137的弹力而使可动皮带轮片132b偏移,V型皮带82则移动到皮带轮132的最小直径处。这样,与发动机的转速相对应,相对于曲柄轴12一侧的皮带轮83及离心离合器一侧的皮带轮132使V型皮带82的卷绕直径发生变化,从而达到变速作用。
如上所述,在发动机起动时,向起动线圈51中通电,能够对发动机施力,而在本实施例中,则同时使用了通过脚踏而起动发动机的脚踏起动装置。下面参照图9对脚踏起动装置进行说明。在上述固定皮带轮83a的背面固定着脚踏起动用的从动棘爪齿轮86。另一方面,在罩36一侧可自由旋转地支撑着带有螺旋齿轮87的支撑轴88。在支撑轴88的端部固定着帽89,在该帽89的端面上形成有与上述从动棘爪齿轮86相啮合的驱动棘爪齿轮90。
而在罩36上可自由旋转地支撑着脚踏轴27,在该脚踏起动轴27上焊接着与上述螺旋齿轮87相啮合的扇形螺旋齿轮91。脚踏起动轴27的端部,即从罩36向外部突出的部分上形成有花键,在该花键上配合设置在脚踏臂28(参照图10)上的花键。此外,符号92表示阻力弹簧,符号93为复位弹簧。
在上述结构中,一旦踩下脚踏起动踏板29,克服复位弹簧93的弹力使脚踏起动轴27及扇形螺旋齿轮91旋转,螺旋齿轮87及扇形螺旋齿轮91设定成让扇形螺旋齿轮91在踏动脚踏起动踏板而转动的情况下产生让支撑轴88施加在皮带轮83一侧的推力,这样的相互扭转的方向。这样,一旦踏下脚踏起动踏板29,支撑轴88就会偏斜到皮带轮83一侧,形成于帽89端面上的驱动棘爪齿轮90便与从动棘爪齿轮86相啮合,其结果是,曲轴12旋转,从而能够让发动机200起动。发动机200一旦起动,脚踏起动踏板29的踏动便减弱,通过复位弹簧93使扇形螺旋齿轮91反转,从而解除驱动棘爪齿轮90与从动棘爪齿轮86的配合。
下面参照图11说明润滑油供给系统。润滑油供给部分设置在曲柄室9的下部。在油底壳147上形成有导入润滑油用的管路148,沿着箭头D1而将润滑油吸入到次摆线泵149中。吸入到次摆线泵149中的润滑油压力很高,排出到管路150中,沿着箭头D2、D3通过管路150排出到曲轴箱内。
这里,在次摆线泵149的泵轴151上结合着齿轮152,而且,在该齿轮152上啮合着与曲柄轴12相结合的齿轮61。即,次摆线泵149由曲柄轴12的旋转驱动,来循环润滑用的润滑油。
如上所示的那样,在本实施例中,将驱动凸轮轴69用的链轮59或者驱动润滑油泵用的齿轮61安装在邻接支撑曲柄轴12的轴承11的曲柄轴12上。这样,在这些接近链轮59或者齿轮61的位置,即离轴承11不远的位置上,配置带有永磁铁19的内转子15。特别是将自动切换起动或者发电的调节器机构的调节平衡重55配置在接近轴承11的位置。
下面对输出曲柄脉冲的传感器的配置进行说明。图12是表示发出曲柄脉冲的传感器(曲柄脉冲发生器)的配置的围绕曲轴的侧视剖视图,图13是其正视剖视图。在这些图中,曲轴箱由前曲轴箱99F及后曲轴箱99R构成,曲柄脉冲发生器153位于后曲轴箱99R一侧,以与曲柄轴12相垂直的方式设置。这样,其检测用的端部153a面对着左曲柄臂12L的外周边缘配置。上述左曲柄臂12L的外周上形成有凸部,即磁阻部154,曲柄脉冲发生器153与该磁阻部154磁力结合,输出曲柄角的检测信号。
接着,对发动机停止启动系统进行说明。在该系统中带有怠速限制模式和允许怠速模式。具体地说,在怠速限制模式中,一旦停止车辆,发动机便自动停止,在停止状态下,一旦进行踩踏加速踏板的操作,发动机就会自动再起动,从而可以使车辆起动(以下称为“停止启动模式”)。另外,在允许怠速模式中有两种,其一是以发动机起动时暖机运转为目的,在发动机最初起动之后暂时允许怠速(以下称为“起动模式”)。另一个是按照驾驶者的意思(由开关设定)始终允许怠速(以下称为“怠速开关模式”)。
图14是表示发动机200中起动停止控制系统整体结构的框图。在该图中,与曲柄轴12同轴设置的起动兼发电装置250由起动电机171和AC发电机(ACG)172构成。ACG172发出的电力通过调节器。整流器167对电池168充电。调节器·整流器167将起动兼发电装置250的电压控制在12V~14.5V之间。电池168在起动继电器162导通时将驱动电流供给到起动电机171中,同时通过主开关173将负荷电流供给到各种一般电器装置174及主控制装置160上。
主控制装置160中连接着检测发动机转速Ne的Ne传感器251、通过手动允许或者限制发动机200的怠速用的怠速开关253、一旦驾驶者落座就闭合接点而输出“H”电平的落座开关254、检测车速的车速传感器255、在停止启动模式下闪亮的停车指示器256、检测节气门开度θ的节气门传感器257、驱动起动电机171而让发动机200开始起动的起动开关258、对应于刹车操作而输出“H”电平的停止开关159、在电池168的电压处于预定值(例如10V)以下时点亮以警告驾驶者充电不足的电池指示器276。
而且,在主控制装置160中,还连接着与曲柄轴12的旋转同步而使火花塞65发火的点火控制装置(带有点火线圈)161、将电力供给到起动电机171中的起动继电器162的控制端子、将电力供给到前大灯169上的前大灯继电器163的控制端子、安装在化油器166上将电力供给双重起动器165上的双重起动器继电器164的控制端子、在预定条件下发出警告音来提醒驾驶者注意的蜂鸣器175。
此外,朝前大灯169的供电控制并不限定于由前大灯继电器163的ON或者OFF的切换控制。例如,不用前大灯继电器163,而代之以采用FET等的开关元件,不用关闭供电而将开关元件以预定的周期以及占空系数进行断续,可以有效地降低施加在前大灯169上的电压,也就是采用断续控制。
图15、图16是表示主控制装置160结构功能的框图(之1、之2),与图14中相同的符号表示相同或者等同的部分。另外,在图17中,一总地表示出了后述起动继电器控制部400的控制内容、双重起动控制部900的控制内容、停车指示器控制部600的控制内容、点火控制部700的控制内容、动作切换部700的控制内容、警告蜂鸣器控制部800的控制内容以及充电控制部500的控制内容。
图15的动作切换部300在怠速开关253的状态以及车辆的状态等到达预定条件时,切换到“起动模式”、“停止启动模式”以及“怠速开关模式”中的之一,同时,“停止启动模式”则切换为禁止一切怠速的第1动作样式(以下称为“第1样式”),以及在预定条件下例处允许怠速的第2动作样式(以下称为“第2样式”)之一。第2样式在前大灯169点亮的状态下的长时间停止发动机的情况下可以防止电池用完,适合于作为防止电池用完的模式。
在动作切换部300的动作切换信号输出部301上,输入有怠速开关253的状态信号。怠速开关253的状态信号在OFF状态(限制怠速)下为“L”电平,而在ON状态(允许怠速)则表示为“H”电平。车速继续判定部303带有计时器303a,车速传感器255在处于预定车速以上的车速经过预定的时间便会被检测出来,从而输出“H”电平的信号。
动作切换信号输出部301对应于怠速开关253及车速继续判定部303的输出信号,以及在发动机点火OFF状态下持续预定时间(本实施例中为3分钟)以上时,相应于“H”电平的点火OFF信号S8021,输出切换主控制装置160的动作模式以及动作样式的信号S301a、S301b、S301c。
图18是表示动作切换信号输出部301中动作模式及动作样式的切换条件的模式图。在动作模式切换信号输出部301中,按下上述主开关173对主控制装置160进行再设置,或者怠速开关253为OFF(条件①成立)时,通过操作模式切换部301a启动“起动模式”。这时,动作模式切换部301a输出“L”电平的动作模式信号S301a。
而该“起动模式”中预定速度以上的车速经过预定时间以上被检测出来时(条件②成立),通过动作模式切换部301a将动作模式从“起动模式”朝“停止启动模式”切换。这时,动作模式切换部301a的动作模式信号S301a从“L”电平朝“H”电平转移。从上述“起动模式”移动之后,由动作样式切换部301b起动“第1样式”,禁止怠速。这时,动作样式切换部301b的样式信号S301b变为“L”电平。
在“第1样式”中,通过后面将要描述的点火OFF继续判定部802(图15),在点火OFF持续3分钟以上时一旦被判定(条件③成立),通过动作样式切换部301b,使“停止启动模式”中的动作样式从“第1样式”“第2样式”切换。这时,从动作样式切换部301b输出的动作样式信号S301b从“L”电平向“H”电平迁移。
而在“第2样式”中,一旦上述条件②成立,通过动作样式切换部301b使动作样式从“第2样式”朝“第1样式”切换。这时,动作样式切换部301b的动作样式信号S301b从“H”电平朝“L”电平迁移。
根据本发明人等的调查,信号等待或者在路口内的右转等待时间为30秒至2分钟的程度,超过该时间的停车则是信号等待或者右转等待时间之外的停车,例如道路工程施工这样的单侧通行限制或者交通阻塞等的可能性很大。这里,在本实施例中,由“停车起动模式”在行驶中点亮前大灯之后,长时间(在本实施例中为3分钟以上)的停车,即强制发动机停止时,将动作样式允许从“第1样式”朝“第2样式”切换。而一旦驾驶者按下起动开关258能够让发动机起动,由于可以形成在怠速的状态的停车,因此防止长时间点亮前大灯169而引起的电池用光。
另一方面,主开关在从OFF切换为ON时,怠速开关处于ON(条件⑥成立),那么从怠速开关模式起动部301c输出的动作模式信号S301c从“L”电平朝“H”电平迁移,“怠速开关模式”启动。此外,不管是在“停车起动模式”里的“第1样式”还是“第2样式”中,一旦怠速开关253被按下,条件④成立,那么“怠速开关模式”就启动。
另外,在“怠速开关模式”中,怠速开关253一旦处于OFF(条件⑤成立),从动作模式切换部301a输出的动作模式信号S301a便处于“L”电平,“起动模式”启动。
回到图15,在Ne判定部306中输入了Ne传感器251的输出信号,发动机的转速一旦超过预定转速,便将“H”电平的信号向前大灯控制部305输出。Ne判定部306如果在发动机的转速超过了预定转速,便切断主开关173,将其输出维持在“H”电平。前大灯控制部305根据上述各动作模式(样式)的信号S301a、S301b、S301c、Ne判定部306的输出信号及行驶判定部701的输出信号,在前大灯继电器163的控制端子上输出“H”电平或者“L”电平的控制信号。在前大灯继电器163上一旦输入了“H”电平信号,前大灯169便点亮。
此外,在不用前大灯继电器163,而采用FEP等的开关元件的情况下,前大灯控制部305不输出“L”电平的控制信号,而是输出预定周期及占空系数的脉冲信号,使朝前大灯169的供电断续控制。
前大灯控制部305如图17所示,除了“起动模式”之外始终输出ON信号。即,在“起动模式”中,通过Ne判定部306检测出预定的设定转速(本实施例中为1500rpm)以上的转速,或者通过行驶判定部701判定出车速比0km更大时,才输出ON信号。
此外,不用前大灯继电器163而采用FET等的开关元件的情况下,在“停止启动模式”的“第1样式”中,通过对应于后面将要详细描述的点火控制来控制开关元件断续开闭,从而能够使电池的放电限制到最小程度。
即,对应于车辆停止而中断(OFF)点火控制,发动机一旦自动停止,前大灯控制部305使施加在前大灯169上的电压从始终为ON时的电压(例如13.1V)到预定减光时的电压(例如8.6V),有效地被降低,从而通过预定周期及宽度比的脉冲信号使开关元件断续控制,来使前大灯169减光。之后,对应于起动动作使点火控制再开启,一旦发动机再起动,前大灯控制部305将直流的“H”电平信号输出到开关元件上。
这样,在发动机自动停止时不会使前大灯169熄灭,从而通过减光来抑制电池的放电。这样,在之后的起动时,能够减小从发电机向电池的充电量,其结果是减少了发动机的电器负荷,从而提高了起动时的加速性能。
点火控制部700在上述动作模式、动作样式的每一个中,在预定的条件下通过点火控制装置161允许或者禁止点火动作。行驶判定部701根据输入到车速传感器255中的检测信号而判别车辆是否处于行驶状态。一旦是行驶状态则输出“H”电平信号。
OR电路702输出行驶判定部701的输出信号与节气门传感器257的状态信号的逻辑和。OR电路704输出上述动作模式信号S301a的反转信号、动作样式信号S301b以及动作模式信号S301c的逻辑和。OR电路703将上述OR电路702、704的输出信号的逻辑和输出给点火控制装置161。点火控制装置161如果在输入信号为“H”电平时按照每个预定的定时进行点火动作,而在“L”时中断点火动作。
点火控制部700如图17所示,如果处于“起动模式”、“停止启动模式的第2样式”以及“怠速开关模式”中的任何一个时,由于OR电路704的输出信号变为“H”电平,从OR电路703始终输出“H”电平信号。即,在“起动模式”、“停止启动模式的第2样式”或者“怠速开关模式”中,点火控制装置161始终动作。
对此,在“停止启动模式的第1样式”中,由于OR电路704的输出信号为“L”电平,通过行驶判定部701一旦判定出车辆在行驶中,或者节气门打开,OR电路702的输出处于“H”电平的条件下进行点火动作。与此相反,车辆处于停止状态并且节气门关闭的话,则中断点火动作。
警告蜂鸣器控制部800在动作模式及动作样式的每一个中,对应车辆行驶状态或者驾驶者的落座状态,给驾驶者发出促其做种种注意的警告,例如蜂鸣音。在非落座继续判定部801中输入落座开关54的状态信号。非落座继续判定部801带有计算驾驶者非落座时间用的计时器8012,计时器8012一旦超时,则输出“H”电平的非落座继续信号S8012。此外,本实施例的计时器8012中其超时被预先设定为一秒。
点火OFF继续判定部802带有计算出发动机点火OFF的时间的计时器8021,在检测出点火OFF状态时立即输出“H”电平的点火OFF信号S8023,同时,启动计时器8021。计时器8021上旦超时便输出“ H”电平的点火OFF继续信号S8021。在本实施例中计时器8021将超时设定成3分钟。
蜂鸣器控制部805根据各动作模式(样式)的信号S301a、S301b、S301c、非落座继续信号S8012、点火OFF继续信号S8021、点火OFF信号S8023、行驶判定部701的输出信号以及节气门传感器257的输出信号,来决定蜂鸣器175的ON/OFF,在ON的情况下将“H”电平的信号朝蜂鸣器驱动部814输出。
蜂鸣器控制部805如图17所示,在动作模式为“起动模式”时,始终将蜂鸣器175处于OFF,在“停止启动模式的第1样式”中,一旦点火OFF状态下的非落座状态持续计时器8021的超时时间(本实施例中为1秒)以上或者点火OFF状态持续计时器8021的超时时间(本实施例中为3分钟)以上时,让蜂鸣器175处于ON。在“停止启动模式的第2样式”中,在不点火(点火OFF)中,由来自节气门传感器257的输出信号而使节气门的开度为“0”。并且由来自车速传感器55输入信号让行驶判定部701将车速判定为0km时,让蜂鸣器175处于ON。在“怠速开关模式”中,点火OFF并且非落座持续1秒钟以上时,让蜂鸣器175处于ON。蜂鸣器驱动部814一旦让蜂鸣器控制部805的输出信号处于“H”电平,则将蜂鸣器驱动信号以0.2秒的时间为ON、1.5秒时间为OFF的方式反复输出给蜂鸣器175。
这样,在本实施例的蜂鸣器控制中,在“停止启动模式”的行驶中,在例如因道路施工这样的一侧交通限制等而让前大灯点亮,同时长时间(本实施例中为3分钟以上)停车(发动机停止)时,“停止启动模式”的动作样式从“第1样式”转移“第2样式”,同时,将允许怠速的指令由蜂鸣器175通知驾驶者。这样,只要驾驶者对应于蜂鸣器而按下起动开关258,便能够防止前大灯169长时间持续点亮而引起的电池用完。
在充电控制部500的加速操作检测部502中,通过来自节气门传感器257的输入信号和来自车速传感器255的输入信号,在车速大于0公里,并且节气门从全闭状态到全开状态开启的时间例如为0.3秒以内时,一旦识别为加速信号,便产生一个加速操作检测脉冲。
起动操作检测部503在车速为0km以下发动机转速处于预定设定转速(本实施例中为2500rpm)以下时,如果节气门为“开”,那么一旦识别为起动操作,便产生一个起动操作检测脉冲。充电控制部504在检测出上述加速检测脉冲信号时启动6秒计时器504a,当该6秒计时器504a超时之后,控制调节器整流管167将电池168的充电电压从平常的14.5V降低到12V。
根据上述充电控制,在驾驶者猛然打开节气门急速加速时,或者从停止状态启动时,充电电压会降低,从而暂降低了起动兼发电装置250的电气负荷。这样,通过起动兼发电装置250也能够降低发动机200的机械负荷,从而提高加速性能。另外,在发动机自动停止时,让FET等开关元件继续控制,使前大灯169光线减弱,从而让电池的放电抑制到最小限度,由于降低了起动兼发电装置250的负荷,因此可以更进一步提高加速性能。
此外,充电控制部504如图17所示,一旦6秒计时器504a超时,发动机的转速超过了设定转速(本实施例中为7000rpm),或者节气门的开度减小,便停止充电控制而让充电电压返回到平常的14.5V。
在图16中,起动继电器控制部400对应于上述各动作模式或者动作样式,在预定的条件下启动起动继电器162。Ne传感器251的检测信号供向怠速降低判定部401。怠速降低判定部401一旦在发动机转速下降到预定怠速转速(例如800rpm)之下时,输出“H”的电平信号。AND电路402输出怠速下降判定部401的输出信号、停止开关259的状态信号、起动开关258的状态信号的理论积。AND电路402则输出怠速降低判定部401的输出信号与节气门传感器257的检测信号和落座开关254的状态信号的逻辑积。OR电路408输出上述各AND电路402、404的输出信号的逻辑和。
OR电路409输出动作模式信号S301c与动作模式信号S301a的反转信号的逻辑和。AND电路403输出AND电路402的输出信号与OR电路409的输出信号的逻辑积。AND电路405输出上述AND电路404的输出信号、上述动作模式信号S301a和上述动作样式信号S301b的反转信号的逻辑积。AND电路407输出上述动作模式信号S301a、动作样式信号S301b及OR电路408的输出信号的逻辑积。OR电路406将上述各AND电路403、405、407的逻辑和输出给起动继电器162。
根据这种起动继电器控制,“起动模式”以及“怠速模式”中OR电路409的输出信号变为“H”电平,从而使AND电路403处于恢复操作(Enable)的状态。这样,发动机的转速在处于怠速之下并且停止开关259为ON状态(刹车操作中)时,起动开关258被驾驶者设定为ON,AND电路402的输出为“H”电平时,起动继电器162导通,从而启动起动电机171。
另外,在“停止启动模式的第1样式”中,AND电路405处于恢复操作(Enable)状态。这样,发动机转速处于怠速之下,落座开关254为ON状态(驾驶者正座在座位上)的状态下,一旦开启节气门,AND电路404的输出便成为了“ H”电平,起动继电器162导通,从而启动起动电机171。
而且,在“停止启动模式的第2样式”中,AND电路407变为恢复操作(Enable)的状态。这样,上述各AND电路402、404中的任何一个处于“H”电平时,起动继电器162便会导通,从而启动起动电机171。
停止时曲柄角度控制部1000对应于发动机停止时凸轮传感器155的检测信号,即曲柄的角度位置来控制起动继电器162以及逆转继电器162a,使发动机停止在后述的所希望的曲柄角度位置。凸轮传感器155在曲柄角度位置处于逆转区域的情况下输出信号“H”,而在处于正转区域的情况下输出信号“L”。由凸轮传感器155检测出的曲柄角度位置检测信号输入停止判定计时器1001中。停止判定计时器1001在曲柄角度位置处于逆转区域所示的信号“H”维持预定的时间Tx之间时,将判定信号输入到AND电路1002中。
在比较部1003中输入Ne传感器251的检测信号,在该比较部1003中将设定成比曲柄转速要大并且比怠速转速要小的基准转速Nref与发动机的转速Ne进行比较。发动机的转速Ne在高于基准转速Nref之上时,输出表示发动机的状态为ON的信号“L”。另外,在发动机的转速Ne未达到基准转速Nref时,输出表示发动机状态为OFF的信号“H”。来自比较部1003的信号输入到AND电路1002中。
另外,停止判定计时器1001的超时信号输入到逆转许可计时器1004中。逆转许可计时器1004对应于来自停止判定计时器1001的超时信号而在经过预定时间Ty时,将输出信号维持为“H”。
AND电路1002以及逆转许可计时器1004的输出信号以及凸轮传感器155的检测信号都输入到AND电路1005中,AND电路1005输出这些输出信号的逻辑和,该逻辑和在转换器1006中反转,供给到逆转继电器162a中。
而且,逆转许可计时器1004的输出信号输入到AND电路1007中。AND电路1007的另一侧的输入通过转换器1008与凸轮传感器155的检测信号相连接。AND电路1007的输出被输入到起动继电器400的OR电路406中。此外,这种停止时曲柄角度控制部1000的动作在以后说明。
双重起动控制部900中,来自Ne传感器251的输出信号输入到Ne判定部901中。该Ne判定部901在发动机转速为预定值以上时输出“H”电平信号,关闭双重起动继电器164。根据这样的结构,在任何的动作模式中,如果发动机的转速处于预定值之上的话,都能够使燃料变浓。
指示器控制部600中,来自Ne传感器251的输出信号输入到Ne判定部601中。该Ne判定部601在发动机转速处于预定值以下时输出“H”电平信号。AND电路602输出落座开关254的状态信号与Ne判定部601的输出信号的逻辑积。AND电路603将AND电路602的输出信号、上述动作模式信号S301a以及动作样式信号S301b的反转信号的逻辑积输出给待机指示器256。待机指示器256在输入信号为“L”电平时灭灯,而在“H”电平时闪亮。
即,待机指示器256由于在“停止启动模式”中的停车时闪亮,如果待机指示器256闪亮,驾驶者即使在发动机停止时,也会知道一旦打开车辆加速器,就会立即启动。
下面对启动时以及停止时起动电机171的控制进行详细说明。在本实施例的发动机中,在如果让曲柄轴正转活塞处于负荷力矩增大的位置的情况下,让曲柄轴逆转直到正转时负荷力矩小的位置,之后,将其起动电机改为正转方向驱动从而起动发动机。然而,如上所述,一旦曲柄轴逆转,会出现在启动之前需要一定时间的问题。为此,车辆停止时的曲柄角度位置在处于预定的逆转区域时,从车辆停止之后到进行下次的起动操作之间预先将曲轴旋转到预定的正转位置。通过这样,一旦在停止后再起动时,能够立即让曲柄轴正转从而启动。
图19示出了起动电机171起动时曲柄位置与超越力矩,即越过上死点时所必需的力矩之间的关系的图表。在该图中,曲柄角度在到达压缩上死点C/T之前450度-630度的范围内的超越力矩小。然而,在压缩上死点C/T之前90度~450度之间的超越力矩大,特别是压缩上死点C/T之前180度其超越力矩变为最大。即,大约在压缩上死点C/T之前的超越力矩大,而大约在排气上死点O/T之前超越力矩小。
在本实施例中,从压缩上死点C/T之前90度到排气上死点O/T之前90度,即将凸轮传感器的输出为“L”的区间做为正转区域,从排气上死点O/T之前90度到压缩上死点C/T之前90度,即将凸轮传感器155的输出为“H”的区间做为逆转区域。这样,做为起动动作如图所示,在发动机停止时曲柄角度位置处于正转区域时,下次起动时从其曲柄位置旋转起动电机171来起动发动机。另一方面,在发动机停止时曲柄角度位置处于逆转区域时,如图所示,在停止发动机之后让起动电机171逆转到上述正转区域,而改变曲柄角度位置。这样,在下次起动时让起动电机171从上述正转区域旋转,从而起动发动机。
下面,对发动机停止时起动电机171的动作结构进行说明。图1所示为起动电机171的正、逆转电路,图20、图21是其正时曲线图。在图1中,凸轮传感器155配置在凸轮轴69的磁阻器72a对面。如图16中说明的那样,凸轮传感器155的检测信号及Ne传感器251的检测信号输入到停止时曲柄角度控制部1000中。另外,在起动继电器控制部400中输入停止开关259以及起动开关258的ON、OFF信号。这样,分别通过停止时曲柄角度控制部1000以及起动继电器控制部400的输出,控制逆转继电器162a(以下称为“继电器RyB”),以及起动继电器162(以下称为“继电器RyA”)。
另一方面,起动电机171通过继电器RyB的第1接点Ryb1连接在继电器RyA的接点Rya上,同时,通过继电器RyB的第2接点Ryb2和电阻R连接在继电器RyA的接点Rya上。继电器RyA的接点Rya的另一端连接在电池168的正极上,而电池168的负极连接在上述第1接点Ryb1的常闭(NC)一侧以及第2接点Ryb2常开(NO)一侧。
在这种结构中,在继电器RyA处于ON,继电器RyB处于OFF的情况下,起动电机171上流动着沿箭头RR方向的电流,电机171逆转。另一方面,继电器RyA处于ON,继电器RyB处于ON的情况下,第1及第2接点Ryb1、Ryb2切换到图中所示的相反一侧,起动电机171上流动着箭头RF方向的电流,电机171正转。继电器RyA处于OFF时,起动电机171不转动。此外,在逆转的情况下,由于电阻R中通入了电流,与正转的情况相比其电流受到了限制,因此逆转时比正转时的旋转速度要小。
在图20、图21中,从来自凸轮传感器155的逆转区域检测信号产生后到经过了预定的时间Tx(例如一秒),逆转区域检测信号继续为“H”时,上述停止判定计时器1001超时,发动机状态表示信号变为ON。这样,从此时经过预定时间Ty(例如一秒),上述计时器1004变为ON,输出逆转许可信号,继电器RyA变为ON。这时曲柄的角度位置由于处在逆转区域,继电器RyB变为OFF,从而在起动电机171上施加负的电压,电机171逆转。当起动电机171旋转,曲柄角度位置变为正转区域时,凸轮传感器155输出正转区域检测信号,即信号“L”,其结果是继电器RyA变为OFF,同时上述AND电路1005的输入之一变为“L”,继电器RyB变为ON。也就是切换到正转一侧。
而且,在本实施例中,在发动机停止时起动电机171逆转的情况下,还能够进行下述的追加控制。图22是表示追加控制概念的图。在该图中,通过发动机的旋转而输出曲柄脉冲PC,在靠近正转区域位置的逆转区域中也输出曲柄脉冲PC。在本实施例中,从逆转开始到检测出曲柄脉冲PC的时间Tpc比预定时间TA(例如0.1秒)更长的情况下,还检测出该逆转区域内的曲柄脉冲PC时直接停止起动电机171(图22(b))。另一方面,在从逆转开始到检测出曲轴脉冲PC的时间Tpc比预定时间TA要短的情况下,在检测出该逆转区域内的曲柄脉冲PC之后再经过时间TB驱动起动电机171后再停止(图22(c))。
而且,在另外的实施例中,发动机停止时起动电机171逆转的情况下,还可以进行下面的追加控制。图22(a)-图22(c)示出了追加控制概念的图。在该图中,由发动机的旋转而输出曲柄脉冲PC,在逆转区域中,在靠近正转区域的预定位置上输出曲柄脉冲PC。在本实施例中,根据从逆转开始到检测出曲柄脉冲PC的时间Tpc对起动电机171逆转时的停止时刻进行控制。即,从逆转开始到检测出曲柄脉冲PC的时间如果长的话惯性就大,如果该时间短的话惯性就小。在检测曲柄脉冲PC时,即自正转区域的一定距离的位置处的惯性大小不同的话,即使同时停止起动电机171,曲轴也不会停在一定的位置。
这里,由于要将曲柄轴停止在正转区域的预定位置,因此在本实施例中,在上述时间Tpc比预定时间PA(例如0.1秒)更长的情况下,如果检测出该逆转区域内的曲柄脉冲PC的话,直接停止起动电机171(图22(b))。另一方面,从逆转开始到检测出曲柄脉冲PC之间的时间Tpc比预定时间PA要短的情况下,在检测出该逆转区域内的曲柄脉冲PC之后,再经过时间TB驱动起动电机171后再停止(图22(c))。
逆转时曲柄脉冲PC的检测时间与正转区域的距离是能够预先知道的,通过发动机的转速与旋转时间,也能够知道因隋性而改变的曲柄角度。因此,可以通过发动机停止时的惯性求得从曲柄脉冲PC检测位置到正转区域的曲柄角度变化时间,这里,通过将直到产生该惯性时间设定成时间TA,可以通过超过时间TA的逆转可使曲柄角度到达正转区域。同样,由于逆转时间没有到达TA便停止了发动机,就没有获得足够的惯性,便不能让曲柄的角度到达正转区域。为此,在这种情况下继续时间TB,让曲柄角度到达正转区域。此外,在通过曲柄脉冲PC的检测而先到达正转区域时,直接停止起动电机171。
通过这种追加控制,与根据到达正转区域时刻的发动机惯性的大小来停止起动电机171不同,能够更接近比逆转区域的正转区域中进行发动机起动的待机。其结果是,由于能够从起动电机171的ON操作在很短时间内起动发动机,因此让驾驶者不会有启动迟缓的感觉。
接着,对上述控制参照图23的流程图进行说明。该流程图的处理在主开关173被ON操作时进行,起动控制只有在起动开关258处于ON并且停止开关259处于ON时开始。首先在步骤S1中凸轮传感器155的输出判别出曲柄角度位置处于逆转区域还是正转区域,如果处于正转区域,在步骤S2~步骤S6中让曲柄轴12正转。即在步骤S2中使继电器RyB处于ON,进行朝正转电路的切换。在步骤S3中启动计时器Tp。在步骤S4中经过继电器RyB的接点保护时间t1而判断是否。如果经过时间t1在步骤S5中将计时器Tp重置。在步骤S6中让继电器RyA处于ON。由此曲柄轴12正转。
另一方面,如果曲柄角度位置处于逆转区域,则进行步骤S1到步骤S7。让继电器RyA处于ON。由此使曲柄轴12逆转。在步骤S8中,凸轮继电器155的输出而判断出曲柄的角度位置是否逆转到达了正转区域。如果逆转到达了正转区域则进行步骤S9,使继电器RyB处于ON,开始正转。
在步骤S10中判断出起动开关258的OFF为否,驾驶者一旦将起动开关258断开,这一判断被肯定则进入步骤S11。在步骤S11中让继电器RyA处于OFF。在步骤S12中将计时器Tp重置。在步骤S13中判断出是否经过继电器RyB的接点保护用的时间t1。如果经过了时间t1,则在步骤S14中让继电器RyB处于OFF。在步骤S15上让继电器Tp重置。
如果起动控制终了,则判别下面的控制种类(步骤S16),分别反复进行以下的控制,即,点火控制(步骤S17),充电控制(步骤S18),前大灯控制(步骤S19)以及蜂鸣器控制(步骤S20)等,使车辆接着行驶。在行驶中如果一定的条件成立,便进行起动控制中的步骤S1,移动到发动机停止控制(后述)。
下面,对发动机停止控制的处理进行说明。在图24的流程图中,在步骤S21由凸轮传感器155的输出判别出曲柄的角度位置是逆转区域还是正转区域。如果是正转区域则进行步骤S22,继电器RyA处于OFF,另一方面,如果是处于逆转区域则进行步骤S23,让继电器RyA处于ON。
接着步骤S22,在步骤S24中发动机起动条件是否成立,即起动开关258处于ON,而且停止开关259也处于ON的话,发动机起动条件成立。如果发动机起动条件成立的话,则进行步骤S24a。在步骤S24a中,判断曲柄角度位置是处于正转区域还是逆转区域,如果是正转区域则进行步骤S25,如果是逆转区域则进行步骤S7(图23)。通过步骤S24a的处理而使发动机停止后,只要进行一次逆转控制便能够让曲柄动作,由于不是始终检测出曲轴的角度位置,因此耗费的电力便少。另外,在逆转控制之后,由驾驶者通过脚踏起动而改动了曲柄角度的情况下,由于必需进行这种判别自相应的逆转来正转起动,因此能够有效地让发动机起动。步骤S25~步骤S29与步骤S2~步骤S6是相同的处理,因此省略其说明。在步骤S30中,判别出发动机的是否起动,如果发动机起动则进行步骤S11(图23)。
另外,在步骤S21中判别成逆转,在步骤S23中让继电器为ON的话,进行步骤S31。在步骤S31中为了检测出从逆转开始到曲柄脉冲,即有曲柄传感器153的检测输出为止的检测时间,而让计时器Tc启动。在步骤S32中判别出是否检测到曲柄脉冲。
如果检测出曲柄脉冲,便进入步骤S33,停止计时器Tc。在步骤34中判别计时器Tc的值是否经过的预先设定的值TA。步骤S34如果是肯定的,即从逆转开始经过了比预定时间更长的时间之后检测出了曲柄脉冲,那么进行步骤S35,让继电器RyA变为OFF。如果继电器RyA为OFF,起动电机171便停止。在电机171停止之后,根据惯性曲柄轴12会旋转再停止。在如此从逆转开始经过预定时间TA之后检测出曲柄脉冲,停止起动电机171的情况下,如上所述在曲柄的角度位置到达正转区域时停止发动机。在步骤S36中将计时器Tc重置。
另一方面,在步骤S33为否定的场合,即从逆转开始在短时间内检测出曲柄脉冲的情况下,在进入步骤S37,让计时器Tc重置,启动新的计时器Tc。在步骤S38中判断出计时器Tc的值是否经过了预先设定的值TB。如果步骤38是肯定的,即从逆转开始经过了预定的时间TB,则进入步骤S35,让继电器RyA处于OFF。如果继电器RyA处于OFF,起动电机171便停止。在电机171停止之后,曲柄轴12根据惯性旋转再停止。这样,在经过从这种逆转开始到预定时间TA之前检测出曲柄脉冲的情况下,最初的逆转的惯性由于不能够到达正转区域,因此再让起动电机171旋转时间TB,让曲柄轴12到达正转区域。
此外,在步骤32为否定的场合,即,在判别曲柄脉冲的有无时没有检测出曲轴脉冲的情况下则进入步骤S39,对是否到达正转区域进行判别。这样,如果这种类别是否定的则进入步骤S32。而另一方面,如果步骤39是肯定的,则停止起动电机171,跳过步骤S35而让继电器RyA处于OFF。
在上述实施例中,检测出凸轮轴69的位置根据凸轮传感器155的输出判断出曲柄角度位置是处于正转区域还是逆转区域。但是,并不限于上述曲柄角度位置检测机构,检测曲柄轴的旋转位置,由此来判别曲柄的角度位置也是可以的。
如上所述,根据权利要求1、2的发明,在随着车辆的停止而使发动机曲柄的角度位置处于接下来的起动电机正转情况下不适当的区域(逆转区域)时,由于在进行其后续的启动操作之前,将曲柄角度位置移动到了适当的区域(正转区域),因此能够通过而启动操作而迅速地进行发动机的起动。因此,例如在交汇点等暂停止时,能够按照驾驶者的启动意思而尽早地做出响应。
另外,即使在车辆长时间停止而使曲柄角度位置发生变化的情况下,只要对应于这时的曲柄角度位置进行必要的逆转,在逆转之后进行正转,便能够确保起动的顺序。
根据权利要求3~12的发明,在随着车辆的停止而使发动机曲柄的角度位置处于接下来的起动电机正转情况下不适当的区域(逆转区域)时,在接着进行之后的启动操作之前,由于将曲柄的角度位置移动到了适当的区域(正转区域),因而能够根据启动操作而迅速地进行发动机的起动,这样,例如在交汇点等暂停止时,能够按照驾驶者的启动意思而尽早地做出响应。
特别是在从逆转区域向正转区域变化曲柄角度位置时,通过对应于曲柄轴的惯性旋转大小而控制起动电机的停止时刻,从而能够让曲柄轴有效地停止在正转区域的所希望的位置。
Claims (11)
1.一种发动机起动装置,它在发动机起动操作时,在曲柄角度位置处于正转区域的情况下让起动电机正转,另一方面,在曲柄角度位置处于逆转区域的情况下,让起动电机逆转直到曲柄角度位置进入到上述正转区域,然后再正转,
其特征是它带有:如果使车辆停止,则发动机自动停止的空转限制模式、和在车辆的停止状态下若操作加速踏板,发动机自动地再启动,使车辆的前进成为可能的停止前进模式,
在上述车辆停止时,曲柄角度位置处于上述逆转区域的情况下,在进行上述起动操作之前使曲柄角度位置变为上述正转区域的起动电机控制机构。
2.根据权利要求1所述的发动机起动装置,其特征在于:它具有检测出凸轮轴位置的凸轮传感器,根据上述凸轮传感器的输出信号而检测出上述正转区域以及上述逆转区域。
3.根据权利要求1所述的发动机起动装置,其特征在于:上述旋转速度是通过从上述起动电机逆转开始直到上述预定位置的到达时间来检测出的。
4.根据权利要求1所述的发动机起动装置,其特征在于:上述控制机构在上述旋转速度超过预定值的情况下,停止启动电机的逆转,而在上述旋转速度没有达到预定值的情况下,再经过预定的时间之后停止启动电机的逆转。
5.根据权利要求1所述的发动机起动装置,其特征在于:上述控制机构在上述旋转速度超过预定值的情况下,停止启动电机的逆转,而在上述旋转速度没有达到预定值的情况下,再经过预定的时间之后停止启动电机的逆转。
6.根据权利要求3~5中任一项所述的发动机起动装置,其特征在于:上述预定位置是在逆转方向马上就要进入上述正转区域之前输出的预定曲柄脉冲检测位置,在该曲柄脉冲检测之前、曲柄角度位置进入到正转区域的情况下,停止启动电机的逆转。
7.根据权利要求1所述的发动机起动装置,其特征在于带有:在从上述逆转区域逆转时,在进入上述正转区域之前的预定位置检测出曲柄轴的旋转速度的速度检测机构,以及
根据上述旋转速度来控制上述起动电机逆转时的停止时刻的控制机构。
8.根据权利要求7所述的发动机起动装置,其特征在于:上述旋转速度是通过从述起动电机逆转开始直到上述预定位置的到达时间来检测出的。
9.根据权利要求7所述的发动机起动装置,其特征在于:上述控制机构在上述旋转速度超过预定值的情况下,停止启动电机的逆转,而在上述旋转速度没有达到预定值的情况下,再经过预定的时间之后停止启动电机的逆转。
10.根据权利要求8所述的发动机起动装置,其特征在于:上述控制机构在上述旋转速度超过预定值的情况下,停止启动电机的逆转,而在上述旋转速度没有达到预定值的情况下,再经过预定的时间之后停止启动电机的逆转。
11.根据权利要求7~10中任一项所述的发动机起动装置,其特征在于:上述预定位置是在逆转方向马上就要进入上述正转区域之前输出的预定曲柄脉冲检测位置,在该曲柄脉冲检测之前,曲柄角度位置进入到正转区域的情况下,停止启动电机的逆转。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP08899099A JP4141044B2 (ja) | 1999-03-30 | 1999-03-30 | エンジン始動装置 |
| JP088990/1999 | 1999-03-30 | ||
| JP088991/1999 | 1999-03-30 | ||
| JP08899199A JP4055973B2 (ja) | 1999-03-30 | 1999-03-30 | エンジン始動装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1269466A CN1269466A (zh) | 2000-10-11 |
| CN1125919C true CN1125919C (zh) | 2003-10-29 |
Family
ID=26430309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN00104838.4A Expired - Fee Related CN1125919C (zh) | 1999-03-30 | 2000-03-30 | 发动机起动装置 |
Country Status (4)
| Country | Link |
|---|---|
| CN (1) | CN1125919C (zh) |
| ES (1) | ES2196931B2 (zh) |
| IT (1) | IT1320284B1 (zh) |
| TW (1) | TW426784B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4027706B2 (ja) * | 2002-04-23 | 2007-12-26 | 本田技研工業株式会社 | エンジンの制御装置 |
| JP2004232539A (ja) * | 2003-01-30 | 2004-08-19 | Denso Corp | エンジン回転停止制御装置 |
| JP5956794B2 (ja) * | 2012-03-19 | 2016-07-27 | 日立オートモティブシステムズ株式会社 | 内燃機関の制御装置 |
| DE102012206157A1 (de) * | 2012-04-16 | 2013-10-17 | Zf Friedrichshafen Ag | Steuerungseinrichtung eines Hybridfahrzeugs und Verfahren zum Betreiben desselben |
| CN105781845B (zh) * | 2016-04-26 | 2018-04-20 | 上海渝癸德信息技术服务中心 | 一体化启动发电控制装置及控制方法 |
| CN111425324B (zh) * | 2020-03-31 | 2021-10-19 | 扬州翊翔航空科技有限公司 | 一种无人机用微型混合动力系统的起动控制方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3351042B2 (ja) * | 1993-09-02 | 2002-11-25 | 株式会社デンソー | 車両用内燃機関始動装置 |
| US5713320A (en) * | 1996-01-11 | 1998-02-03 | Gas Research Institute | Internal combustion engine starting apparatus and process |
| DE19817497A1 (de) * | 1998-04-20 | 1999-10-28 | Isad Electronic Sys Gmbh & Co | Verfahren und Startersystem zum Starten eines Verbrennungsmotors |
-
2000
- 2000-03-13 TW TW089104475A patent/TW426784B/zh not_active IP Right Cessation
- 2000-03-29 ES ES200000774A patent/ES2196931B2/es not_active Expired - Fee Related
- 2000-03-29 IT IT2000TO000291A patent/IT1320284B1/it active
- 2000-03-30 CN CN00104838.4A patent/CN1125919C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| ES2196931A1 (es) | 2003-12-16 |
| ITTO20000291A1 (it) | 2001-09-29 |
| CN1269466A (zh) | 2000-10-11 |
| TW426784B (en) | 2001-03-21 |
| ITTO20000291A0 (it) | 2000-03-29 |
| IT1320284B1 (it) | 2003-11-26 |
| ES2196931B2 (es) | 2005-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1098782C (zh) | 搭载发动机停止起动控制装置的车辆 | |
| CN1133000C (zh) | 引擎自动停止起动控制方法 | |
| CN1247887C (zh) | 发动机起动控制装置 | |
| CN1131940C (zh) | 发动机起动方法 | |
| JP7007492B2 (ja) | エンジン再始動装置 | |
| CN1114754C (zh) | 发动机自动停止起动控制装置 | |
| CN1196858C (zh) | 发动机起动控制装置 | |
| CN1098413C (zh) | 引擎自动停止起动控制装置 | |
| CN1255624C (zh) | 搭载发动机停止起动控制装置的车辆 | |
| CN1125919C (zh) | 发动机起动装置 | |
| CN1232726C (zh) | 车辆用发动机的起动装置 | |
| CN1098973C (zh) | 搭载有发动机停止起动控制装置的车辆 | |
| CN1168893C (zh) | 发动机起动兼助力装置 | |
| CN1264707C (zh) | 发动机的自动停止起动控制装置 | |
| CN1211571C (zh) | 发动机的自动停机/起动控制设备 | |
| JP2002115578A (ja) | エンジン自動停止始動制御装置 | |
| CN1193164C (zh) | 发动机起动装置 | |
| CN1349046A (zh) | 车辆用发动机起动装置 | |
| CN1089966C (zh) | 灯泡电压调整装置 | |
| JP2000303853A (ja) | 4サイクルエンジン | |
| JP2001012335A (ja) | エンジン停止始動制御システムのエンジン始動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20031029 Termination date: 20160330 |