CN111108055B - 智能多轿厢电梯系统 - Google Patents
智能多轿厢电梯系统 Download PDFInfo
- Publication number
- CN111108055B CN111108055B CN201880053712.6A CN201880053712A CN111108055B CN 111108055 B CN111108055 B CN 111108055B CN 201880053712 A CN201880053712 A CN 201880053712A CN 111108055 B CN111108055 B CN 111108055B
- Authority
- CN
- China
- Prior art keywords
- track
- car
- switching
- auxiliary
- rail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/003—Kinds or types of lifts in, or associated with, buildings or other structures for lateral transfer of car or frame, e.g. between vertical hoistways or to/from a parking position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/2408—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration where the allocation of a call to an elevator car is of importance, i.e. by means of a supervisory or group controller
- B66B1/2466—For elevator systems with multiple shafts and multiple cars per shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/3476—Load weighing or car passenger counting devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B11/00—Main component parts of lifts in, or associated with, buildings or other structures
- B66B11/04—Driving gear ; Details thereof, e.g. seals
- B66B11/043—Driving gear ; Details thereof, e.g. seals actuated by rotating motor; Details, e.g. ventilation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B17/00—Hoistway equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
- B66B7/02—Guideways; Guides
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/20—Details of the evaluation method for the allocation of a call to an elevator car
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/40—Details of the change of control mode
- B66B2201/402—Details of the change of control mode by historical, statistical or predicted traffic data, e.g. by learning
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Civil Engineering (AREA)
- Elevator Control (AREA)
- Types And Forms Of Lifts (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Abstract
本发明公开了一种智能多轿厢电梯系统,一种智能多轿厢电梯系统,包括至少两个井道、切换机构、动力机构以及多个轿厢,所述井道内设有轿厢行走的轨道,相邻所述井道之间设有切换机构,所述轿厢通过切换机构在相邻井道之间切换位置;所述轿厢通过动力机构驱动在井道内或者井道之间做上行、下行运动或切换运动,所述轿厢通过动力机构驱动停靠于任意楼层上客或者下客。本发明的智能多轿厢电梯系统,在一条井道内设置多个独立运行的轿厢,大幅度增加了运送效率,有效的节约了建筑空间和建筑成本。
Description
技术领域
本发明涉及垂直升降电梯技术领域,尤其涉及一种智能多轿厢电梯系统。
背景技术
传统升降电梯主要为绳轮牵引井道式电梯,每个井道只有一个轿厢,运行在至少两列垂直的或倾斜角小于15°的刚性导轨之间。这种结构的电梯在中低层建筑中尚能满足用户要求,但是对于现代城市日益增长的高层建筑,传统的电梯存在运送效率低、候梯时间长等问题,日常维护和故障维修时,整个井道无法使用,并且安全性也有待提高。在高层建筑中,通常多增设井道和轿厢来增加电梯的运送能力,满足用户需求,但是众多的电梯井道占据了大量宝贵的建筑空间,增加了建筑成本,并未从根本上解决电梯运送效率低的问题。
目前已知有各种用于提供和控制在一个电梯竖井内的一部以上的电梯轿厢、用于设置电梯设备的多个平行的电梯竖井和用于将电梯轿厢从一个电梯竖井转移到另一个电梯竖井的方法。这种具有多个电梯竖井的已知的电梯的缺点在于,多个轿厢位于同一个井道内,有碰撞、速度缓慢等问题。因此在输送量剧增的情况下运载容量将受到限制。
发明内容
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种智能多轿厢电梯系统,在一条井道内能够设置多个独立运行的轿厢,大幅度增加了运送效率,有效的节约了建筑空间和建筑成本。
为解决上述技术问题,本发明提出的技术方案为:
一种智能多轿厢电梯系统,包括至少两个井道、切换机构、动力机构以及多个轿厢,所述井道内设有轿厢行走的轨道,相邻所述井道之间设有切换机构,所述轿厢通过切换机构在相邻井道之间切换位置;所述轿厢通过动力机构驱动在井道内或者井道之间做上行、下行运动或切换运动,所述轿厢通过动力机构驱动停靠于任意楼层上客或者下客。
作为上述技术方案的进一步改进:
所述系统包括至少两个相邻的井道,所述多个轿厢可同时在井道内进行上行或者下行运动;每层楼层均设有切换机构。
所述至少两个井道中,至少一个为上行通道,至少一个为下行通道;每层楼层分别设有上行电梯出入口和下行电梯出入口,所述上行电梯出入口和下行电梯出入口分别位于井道的两侧。
每个所述井道内均设有运行轨道,所述轿厢通过动力机构的驱动沿运行轨道上行或者下行。
所述切换机构包括切换轨道,所述切换轨道铰接于井道内,所述切换轨道沿井道的长度方向设有多个,上下相邻的切换轨道首尾衔接,每个楼层均设置切换轨道。
所述切换机构还包括切换驱动,所述切换轨道成对设置,每个切换轨道设置一个切换驱动,所述切换轨道的中间铰接于井道,所述切换轨道通过切换驱动带动旋转与相邻井道内的轨道连接或者断开。
所述切换轨道为弧形。
所述切换驱动为液压千斤顶,所述液压千斤顶固定于井道内。
所述运行轨道和切换轨道均为齿条轨道,所述齿条轨道由钢架、固定槽和齿条构成,所述钢架一侧布设齿条,另一侧布设固定槽,所述齿条和动力机构啮合,所述固定槽和动力机构咬合。
所述系统还包括转移机构,楼层的第一层设有多个电梯出入口,所述转移机构设于第一层,多个所述轿厢通过转移机构移动于多个电梯出入口之间。
所述转移机构包括转移托运车和多个转移轨道,每个电梯出入口对应一个转移托运车,所述井道衔接于多个电梯出入口的侧面,所述转移托运车在转移轨道上移动,所述轿厢通过转移托运车在电梯出入口和井道之间做移动。
所述系统还包括底层维护机构,所述底层维护机构位于楼层的第一层下方的底层,所述底层维护机构包括环形轨道和转移托运车,所述井道位于环形轨道上,所述轿厢沿井道下行至环形轨道,所述轿厢通过转移托运车在环形轨道上移动,所述轿厢不运行时停放在环形轨道上。
所述底层维护机构还包括维修轨道,所述维修轨道与环形轨道的两侧连通。
所述转移轨道、环形轨道和维修轨道均为齿条轨道,所述齿条轨道由钢架、固定槽和齿条构成,所述钢架一侧布设齿条,另一侧布设固定槽,所述齿条和动力机构啮合,所述固定槽和动力机构咬合。
所述转移托运车的底部设有万向行走轮。
所述动力机构包括主动力机构和切换动力机构,所述主动力机构包括电机、齿轮、爬行轴承、支撑板和安装架,所述支撑板安装于安装架上,所述电机和爬行轴承安装于支撑板上,所述齿轮通过电机驱动,所述齿轮与齿条啮合,所述爬行轴承与固定槽咬合;所述切换动力机构包括滚轴导轨、弹簧和限位装置,所述安装架固定于滚轴导轨的滑杆上,所述滚轴导轨的滑块固定于轿厢上,所述滑杆滑设于滑块中;所述弹簧的一端通过一弹簧固定板固定与轿厢上,另一端与限位装置固定连接,所述限位装置与滑杆连接,所述限位装置控制滑杆滑动或固定。
所述支撑板与安装架之间设有减震器。
所述限位装置包括轨道切变锁止器和推动块,所述轨道切变锁止器安装于轿厢上,所述推动块固定于滑杆上,所述弹簧的另一端固定于推动块上,所述轨道切变锁止器位于推动块与弹簧连接的一侧,所述轨道切变锁止器限制推动块移动。
所述动力机构设有四个,分别安装于轿厢的相对两边,每边两个,对称分布。
所述系统还包括顶层轨道机构,所述顶层轨道机构位于楼层的顶层,所述顶层轨道机构包括椭圆形闭合的顶层轨道以及多个顶层托运车,所述顶层轨道与井道衔接,所述顶层托运车可滑动于顶层轨道上,所述轿厢通过顶层托运车在各井道之间切换位置。
上述技术方案的一种实施方式为:
所述井道设有两个,其中一个为上行通道,另一个为下行通道,所述切换机构设于两个井道之间,所述轿厢通过切换机构切换于上行通道或者下行通道之间。
上述技术方案的第三种实施方式为:
所述井道设有三个,包括上行通道、下行通道和辅助通道,所述辅助通道位于上行通道和下行通道之间,相邻的两个所述井道之间设有切换机构,所述轿厢通过切换机构切换于上行通道和辅助通道之间,或者切换于下行通道和辅助通道之间。
所述上行通道和辅助通道之间的切换机构与下行通道和辅助通道之间的切换机构首尾衔接。
上述技术方案的第四种实施方式为:
所述井道设有四个,依次包括上行通道、辅助上行通道、辅助下行通道和下行通道,相邻的两个所述井道之间设有切换机构,所述轿厢通过切换机构切换于上行通道和辅助上行通道之间、下行通道和辅助下行通道之间或者辅助上行通道和辅助下行通道之间。
相邻所述井道内的切换机构首尾衔接。
上述技术方案的第五种实施方式为:
所述井道设有六个,依次包括上行通道、辅助上行通道、上行快速通道、下行快速通道、辅助下行通道和下行通道,相邻的两个所述井道之间设有切换机构,所述轿厢通过切换机构切换于相邻的井道之间。
所述切换机构包括滑轮和滑轨组件,所述滑轨组件由至少两件套设地滑轨组成,所有所述滑轨的长度等于或大于相邻井道的宽度,所述滑轨通过滑轨驱动相对其它滑轨滑动伸出或收回,所述滑轮滑设于滑轨上。
上述技术方案的第六种实施方式为:
所述系统还包括主轨道机构、副轨道机构、转移机构、底层维护机构,所述切换机构衔接主轨道机构和副轨道机构,所述轿厢通过切换机构在主轨道机构和副轨道机构之间切换;所述转移机构设于楼层位于地面上的第一层,多个所述轿厢通过转移机构移动于第一层的多个电梯口;所述底层维护机构设于楼层位于地面下的地下室,所述底层维护机构位于主轨道机构和副轨道机构的底部,所述底层维护机构与第一层的每个电梯口连接;所述轿厢通过动力机构驱动做上下运动或切换运动;运行时,所述多个轿厢同时在主轨道机构内上行或下行,每个所述轿厢通过切换机构分别从主轨道机构切换到副轨道机构上、下乘客。
所述主轨道机构包括上行主轨道和下行主轨道,所述副轨道机构包括上行副轨道和下行副轨道,所述上行副轨道和下行副轨道位于上行主轨道和下行主轨道之间,楼层进出通道位于上行副轨道和下行副轨道之间。
所述切换机构包括多个弧形的切换轨道和切换驱动,沿轿厢上行或下行方向所述切换轨道成对间隔设置;成对使用时,其中一个切换轨道位于上行主轨道中间或下行主轨道中间,另一个切换轨道位于上行副轨道中间或下行副轨道中间,每个切换轨道设置一个切换驱动,所述切换轨道的中间铰接于井道,所述切换轨道通过切换驱动带动旋转连接主轨道机构和副轨道机构或者远离主轨道机构和副轨道机构。
所述主轨道机构和副轨道机构按楼层层数分为n个单元,每个单元的上端和下端设置切换机构,上端和下端的切换轨道对称布置。
所述上行主轨道、下行主轨道、上行副轨道、下行副轨道和切换轨道均为齿条轨道,所述齿条轨道由钢架、固定槽和齿条构成,所述钢架一侧布设齿条,另一侧布设固定槽,所述齿条和动力机构啮合,所述固定槽和动力机构咬合。
所述转移机构包括转移托运车和多个转移轨道,第一层设有多个电梯口,多个所述电梯口分两排布置,每个电梯口设置一个转移托运车,所述主轨道机构衔接于转移轨道的中间,所述转移托运车在转移轨道上移动,每个所述转移托运车通过转移轨道与主轨道机构连接,所述轿厢通过转移托运车运送到每个电梯口。
所述底层维护机构包括环形轨道和转移托运车,所述井道位于环形轨道上,所述轿厢沿井道下行至环形轨道,所述轿厢通过转移托运车在环形轨道上移动,所述轿厢不运行时停放在环形轨道上。
所述底层维护机构还包括维修轨道,所述维修轨道设有两个,且分别环形轨道设置。
所述转移轨道、环形轨道和维修轨道均为齿条轨道,所述齿条轨道由钢架、固定槽和齿条构成,所述钢架一侧布设齿条,另一侧布设固定槽,所述齿条和动力机构啮合,所述固定槽和动力机构咬合。
所述转移托运车的底部设有万向行走轮。
所述动力机构包括主动力机构和切换动力机构,所述主动力机构包括电机、齿轮、爬行轴承、支撑板和安装架,所述支撑板安装于安装架上,所述电机和爬行轴承安装于支撑板上,所述齿轮通过电机驱动,所述齿轮与齿条啮合,所述爬行轴承与固定槽咬合;所述切换动力机构包括滚轴导轨、弹簧和限位装置,所述安装架固定于滚轴导轨的滑杆上,所述滚轴导轨的滑块固定于轿厢上,所述滑杆滑设于滑块中;所述弹簧的一端通过一弹簧固定板固定与轿厢上,另一端与限位装置固定连接,所述限位装置与滑杆连接,所述限位装置控制滑杆滑动或固定。
所述支撑板与安装架之间设有减震器。
所述限位装置包括轨道切变锁止器和推动块,所述轨道切变锁止器安装于轿厢上,所述推动块固定于滑杆上,所述弹簧的另一端固定于推动块上,所述轨道切变锁止器位于推动块与弹簧连接的一侧,所述轨道切变锁止器限制推动块移动。
所述动力机构设有四个,分别安装于轿厢的相对两边,每边两个,对称分布。
所述电梯还包括顶层轨道机构,所述顶层轨道机构包括椭圆形闭合的顶层轨道以及多个顶层托运车,所述顶层轨道与主轨道机构、副轨道机构连接,所述顶层托运车可滑动于顶层轨道上,所述主轨道机构、副轨道机构通过顶层托运车衔接。
所述主轨道机构和副轨道机构按楼层层数分为n个单元,每个单元均设置切换机构。
所述主轨道机构包括上行主链条轨道和下行主链条轨道,所述上行主链条轨道和下行主链条轨道上均固定设有多个轿厢提升平台,每个轿厢对应一个轿厢提升平台;所述轿厢在主轨道机构时通过轿厢提升平台做升降运动。
上述技术方案的第七种实施方式为:
所述副轨道机构分为上行副机构和下行副机构,上行副机构和下行副机构位于上行主链条轨道和下行主链条轨道之间,楼层进出通道位于上行副机构和下行副机构之间,所述副轨道机构包括曳引装置,每个单元设置一个曳引装置,所述曳引装置包括曳引箱、曳引绳和吊箱,所述曳引箱固定于每个单元的顶部,所述曳引绳一端绕设于曳引箱,另一端与吊箱固定连接,所述吊箱面对轿厢提升平台的一侧设有轿厢的进出口,所述曳引箱通过曳引绳带动吊箱做升降运动。
所述切换机构包括跳板,所述跳板铰接于吊箱的侧面,所述跳板通过气缸驱动转动贴紧吊箱或者与轿厢提升平台衔接。
所述副轨道机构还包括配重块,所述配重块和曳引绳的一端固定连接。
所述轿厢提升平台上设有定位凹槽,所述轿厢的底部设有与定位凹槽配合定位的定位凸起。
所述轿厢提升平台和吊箱分别设有推动轿厢移动的液压千斤顶。
所述主轨道机构还包括辅助固定导轨,所述轿厢上设有稳定支撑架,所述稳定支撑架一端与轿厢铰接,另一端与辅助固定导轨配合连接,所述稳定支撑架沿辅助固定导轨滑动,所述稳定支撑架通过气缸驱动转动与辅助固定导轨连接或离开辅助固定导轨。
所述上行主链条轨道和下行主链条轨道设有四个,分别分布于轿厢的四个角,每个所述上行主链条轨道或下行主链条轨道相应配设一个辅助固定导轨。
所述转移机构包括转移托运车、多个转移轨道和辅助转移井道,第一层设有多个电梯口,多个所述电梯口分两排布置,所有电梯口的电梯门不全相对设置,所述主轨道机构和副轨道机构垂直位于两排电梯口之间,所述副轨道机构位于上行主链条轨道和下行主链条轨道之间;所述辅助转移井道设有两个,分别位于上行主链条轨道和下行主链条轨道的外侧;所述每个电梯口设置一个转移托运车,所述副轨道机构和电梯口之间或者通过辅助转移井道和电梯口之间都通过转移轨道衔接,所述转移托运车在转移轨道上移动,所述轿厢通过转移托运车运送到每个电梯口。
所述辅助转移井道位于最底部的楼层单元,所述辅助转移井道内设有曳引装置和切换机构。
所述电梯还包括顶层轨道机构,所述顶层轨道机构包括椭圆形闭合的顶层轨道、两个辅助提升井道和至少一个顶层托运车,所述顶层托运车滑设于顶层轨道上,所述上行副机构、下行副机构和辅助提升井道通过顶层托运车衔接。
所述辅助提升井道设有两个,位于最顶部的楼层单元,所述辅助提升井道位于主轨道机构外侧,所述辅助提升井道内设有曳引装置和切换机构。
所述每一层都设有轿厢提升平台。
所述系统还包括智能控制系统,智能控制系统包括重量检测模块、传感模块、处理模块和安全模块;
重量检测模块安装于轿厢上,用于记录各时间段、各楼层的轿厢重量,并将数据传送给处理模块进行存储建立数据库;
传感模块用于检测轿厢的运行速度、温度,并将检测到的数据传送至处理模块;
处理模块根据数据库的数据分析确定人流高峰期和高频率楼层,来分配待运行的轿厢数量;
当处理器判断系统出现故障时,对安全模块发出信号,安全模块减少放行的轿厢数量。
本发明提供的一种智能多轿厢电梯系统,适用于载运乘客、货物的高层居民楼、写字楼、大型商场等场所的电梯运送系统,和传统电梯相比具有以下优点:
(1)本发明的智能多轿厢电梯系统,运送效率高,一台轿厢运行于多条井道,同一井道内可同时运行多部轿厢,各轿厢之间互不干扰,大大缩短人流量高峰期的候梯时间。以一栋50层的建筑为例,每个单元由4层组成。根据各项参数若设计电梯最高运行速度为4m/s,则紧急制动加速度约为5m/s2,各轿厢的最小安全距离约为4m。双井道并行电梯最少可同时运行14个轿厢,运量相当于普通电梯的7倍;三井道并行电梯最少可同时运行27个轿厢,运量相当于普通电梯的9倍;四井道并行电梯最少可同时运行40个轿厢,运量可达普通电梯的10倍。
(2)本发明的智能多轿厢电梯系统,适用于载运乘客、货物的高层居民楼、写字楼、大型商场等场所的电梯运送机构,送效率高,同一井道内可同时运行多部轿厢,各轿厢之间互不干扰,大大缩短人流量高峰期的候梯时间。以一栋80层的建筑为例,安全距离设定为两层,则上行单元和下行单元均可设置20个,每个单元内可同时运行两个轿厢,副轨道上可同时运行80个轿厢,主轨道可同时运行80个轿厢,一套电梯最大的轿厢数可达160个。
(3)本发明的智能多轿厢电梯系统,安全性能高,采用齿轮驱动系统,杜绝曳引绳断裂导致轿厢坠落的危险,承载能力大,结构稳定,安全可靠;便于日常保修和及时抢修,保证安全性能。
(4)本发明的智能多轿厢电梯系统,成本低廉,占用建筑面积少,节约建筑面积和建筑成本。
(5)本发明的智能多轿厢电梯系统,能够在堵塞、拥堵或者某井道出现电梯故障的时候依旧运行,节约时间,工作效率高。
附图说明
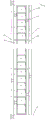
图1是本发明实施例1的双井道并行运行轨迹图。
图2是本发明双井道并行整体结构示意图。
图3是本发明实施例2三井道并行运行轨迹图。
图4是本发明三井道并行整体结构示意图。
图5是本发明实施例3四井道并行运行轨迹图。
图6是本发明四井道并行整体结构示意图。
图7是本发明实施例4六井并行运行轨迹图。
图8是本发明六井并行整体结构示意图。
图9是本发明动力机构应用实施的结构示意图。
图10是本发明图9的侧视结构示意图。
图11是本发明轿厢的结构示意图。
图12是本发明主动力机构的结构示意图。
图13是本发明齿条轨道的结构俯视图。
图14是图13的俯视结构示意图。
图15是本发明切换轨道的结构示意图。
图16(a)是本发明应用实施时切换轨道收回的结构示意图。
图16(b)是本发明应用实施时切换轨道展开的结构示意图。
图17(a)是本发明应用实施时切换轨道展开之前的原理示意图。
图17(b)是本发明应用实施时切换轨道展开轿厢切换位置的原理示意图。
图17(c)是本发明应用实施时切换轨道收回的原理示意图。
图18是本发明顶层轨道的结构示意图。
图19是本发明底层维护机构的结构示意图。
图20是本发明转移机构的结构示意图。
图21是本发明实施例5轿厢切换的过程示意图。
图22是本发明实施例5中双井道并行的运行示意图。
图23(a)是本发明实施例5切换时的应用实施示意图。
图23(b)是本发明实施例5切换时滑轨伸长的应用实施示意图。
图24是本发明实施例6的结构示意图。
图25是本发明实施例6应用实施局部的结构示意图。
图26是本发明实施例6中应用实施时转移机构的结构示意图。
图27是本发明实施例6应用实施时底层维护机构的结构示意图。
图28是本发明实施例7的结构示意图。
图29是本发明实施例7应用实施局部的结构示意图。
图30是本发明实施例7中应用实施时顶层轨道的结构示意图。
图31是本发明实施例7中应用实施时转移机构的结构示意图。
图32是本发明实施例7中主轨道机构的结构示意图。
图33是图32的俯视图。
图中标号说明:
1、轿厢;11、上行通道;12、下行通道;13、辅助通道;14、辅助上行通道;15、辅助下行通道;16、上行快速通道;17、下行快速通道;18、稳定支撑架;2、主轨道机构;21、上行主轨道;22、下行主轨道;23、钢架;24、固定槽;25、齿条;26、上行主链条轨道;27、下行主链条轨道;28、轿厢提升平台;281、定位凹槽;29、辅助固定导轨;3、副轨道机构;31、上行副轨道;32、下行副轨道;33、曳引箱;34、曳引绳;35、吊箱;36、配重块;4、切换机构;41、切换轨道;42、切换驱动;43、跳板;44、滑轨;45、滑轮;5、转移机构;51、转移托运车;52、转移轨道;53、辅助转移井道;6、底层维护机构;61、环形轨道;62、维修轨道;7、动力机构;71、电机;72、齿轮;73、爬行轴承;74、支撑板;741、减震器;75、安装架;76、滚轴导轨;761、滑杆;762、滑块;77、弹簧;771、弹簧固定板;78、轨道切变锁止器;79、推动块;8、顶层轨道机构;81、顶层轨道;82、顶层托运车;83、辅助提升井道;9、井道。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
实施例1
图1、图2、图9至图20示出了本发明智能多轿厢电梯系统的第一种实施方式,包括两个相邻的井道9、切换机构4、动力机构7以及多个轿厢1,多个轿厢1可同时在井道9内进行上行或者下行运动;每层楼层均设有切换机构4,轿厢1通过切换机构4在两个井道9之间切换;轿厢1通过动力机构7驱动做上行、下行运动或切换运动,轿厢1通过动力机构7驱动停靠于任意楼层上客或者下客。
本实施例中,所有轨道成对布设。
本实施例中,两个井道9中,一个为上行通道11,另一个为下行通道12;每层楼层分别设有上行电梯出入口和下行电梯出入口,上行电梯出入口和下行电梯出入口分别位于井道9的两侧。每个井道9内均设有运行轨道,轿厢1通过动力机构7的驱动沿运行轨道上行或者下行。
如图15至17所示,本实施例中,切换机构4包括切换轨道41和切换驱动42,切换轨道41为弧形,两端为斜角状。每个切换轨道41设置一个切换驱动42,切换驱动42为液压千斤顶,液压千斤顶固定于井道9内。切换轨道41成对设置,其中一个切换轨道41的中间铰接于上行通道11的井道9内,另一个切换轨道41的中间铰接于下行通道12的井道9内。切换轨道41沿井道9的长度方向设有多个,上下相邻的切换轨道41首尾衔接,每个楼层均设置切换轨道41。如图16(a)和图16(b)所示,切换轨道41通过液压千斤顶带动旋转,旋转展开时切换轨道41连接两个井道9内相应的运行轨道,旋转收回时断开与两个井道9内运行轨道的连接。当所有切换轨道41均与运行轨道连接时,所有切换轨道41形成连续地“S”型且相邻切换轨道41的首尾连接。
本实施例中,运行轨道和切换轨道41均为齿条轨道,齿条轨道由钢架23、固定槽24和齿条25构成,钢架23一侧布设齿条25,另一侧布设固定槽24,齿条25和动力机构7啮合,固定槽24和动力机构7咬合。电梯供电、信号轨道安装在固定槽24的一侧。每根齿条轨道安装两条供电/信号线轨道,分别与动力机构7相连。
如图17(a)~图17(c)所示,当轿厢1要从上行通道11切变到下行通道12时,动力机构7接收到控制信号,液压千斤顶作用在切变轨道41的变轨支点上,推动切变轨道41展开,连通上行通道11和下行通道12。轿厢1进入下行通道12后,液压千斤顶逐渐减少施加在切变轨道41上的推力,切变轨道41收回,上行通道11上行通道11和下行通道12恢复正常运行。
如图20所示,本实施例中,系统还包括转移机构5,转移机构5设于第一层,转移机构5包括转移托运车51和多个转移轨道52,楼层的第一层设有多个电梯出入口,每个电梯出入口对应一个转移托运车51,上行通道11和下行通道12衔接于多个电梯出入口的侧面,转移托运车51在转移轨道52上移动,轿厢1通过转移托运车51在电梯出入口和上行通道11或者下行通道12之间做移动。转移托运车51的底部设有万向行走轮,可在多个方向上运动,转弯时轿厢1不转动,轿厢1在转移轨道52的两条垂直方向的轨道上转移时保持平动。轿厢1上行时由转移托运车51从各电梯出入口沿转移轨道52运送至上行通道11上行,下行时轿厢1沿下行通道12到达第一层后,由转移托运车51托运至各电梯出入口下客。
如图19所示,本实施例中,系统还包括底层维护机构6,底层维护机构6位于楼层第一层下方的底层,如果楼层设有地下停车库,则底层是位于停车库下面一层,底层维护机构6需位于楼层的最下面一层。底层维护机构6包括环形轨道61和转移托运车51,上行通道11和下行通道12与环形轨道61衔接,轿厢1从下行通道12下行至环形轨道61,再通过转移托运车51在环形轨道61上移动。轿厢1不运行时停放在环形轨道61上。需要上行时,轿厢1被转移托运车51沿环形轨道61运送到上行通道11,轿厢随机派送至各上行通道11。
本实施例中,底层维护机构6还包括维修轨道62,维修轨道62与环形轨道61的两侧连通。轿厢1出现故障或需要检修维护时,被托运至维修轨道62,对其它轿厢1的运行不造成干扰。
本实施例中,转移轨道52、环形轨道61和维修轨道62均为齿条轨道,齿条轨道由钢架23、固定槽24和齿条25构成,钢架23一侧布设齿条25,另一侧布设固定槽24,齿条25和动力机构7啮合,固定槽24和动力机构7咬合。
如图9至图12所示,本实施例中,动力机构7包括主动力机构和切换动力机构。主动力机构包括电机71、齿轮72、爬行轴承73、支撑板74和安装架75,安装架75为“∟”型钢板,支撑板74安装于安装架75的一边,支撑板74与安装架75之间设有减震器741。电机71和爬行轴承73安装于支撑板74上,齿轮72通过电机71驱动,齿轮72与齿条25啮合,爬行轴承73与固定槽24咬合。齿轮72的传动杆一侧安装稳定轴承,保证运行过程的平稳。支撑板74上位于爬行轴承73的两端设置控制器,接收电源和信号。
切换动力机构包括滚轴导轨76、弹簧77和限位装置,安装架75的另一边固定于滚轴导轨76的滑杆761上,滚轴导轨76的滑块762固定于轿厢1上,滑杆761滑设于滑块762中;弹簧77的一端通过一弹簧固定板771固定与轿厢1上,另一端与限位装置固定连接,限位装置与滑杆761连接,限位装置控制滑杆761滑动或固定,确保安全变轨。
本实施例中,限位装置包括轨道切变锁止器78和推动块79,轨道切变锁止器78安装于轿厢1上,推动块79固定于滑杆761上,弹簧77的另一端固定于推动块79上,轨道切变锁止器78位于推动块79与弹簧77连接的一侧,轨道切变锁止器78限制推动块79移动。
切换动力机构设有两个,安装架75固定于两个滑杆761上,滑块762设有四件,每个滑杆761上设置两件,安装架75位于两个滑块762之间。滑杆761的移动带主动力机构。变轨时触发轨道切变锁止器78,解除对滑杆761的锁定,切变轨道41对齿轮72和爬行轴承73的压力推动整个主动力机构的滑动,主动力机构推动弹簧77压缩,切换动力机构在切变轨道41斜角段的行程上完成收缩。轿厢1运行到切变轨道41另一端的斜角处时,轨道对切换动力机构的压力逐渐减小,主动力机构推动弹簧77伸长,推动主动力机构恢复到原来位置。
本实施例中,如图11所示,动力机构7设有四个,分别安装于轿厢1的相对两边,每边两个,对称分布。每个主动力机构上安装一个加速度传感器,实时监测齿轮72的震动情况,了解电梯各部件的工作情况,发现轨道和各轿厢1主动力机构的异常以及进行故障定位,便于及时维护和检修,保证电梯的安全。四个动力机构7中①号动力机构7的控制器连接电源正级,②号动力机构7的控制器连接电源负级,③号动力机构7的控制器连接信号线的正级,④号动力机构7的控制器连接信号线的负级。
如图18所示,本实施例中,系统还包括顶层轨道机构8,顶层轨道机构8位于楼层的顶层,顶层轨道机构8包括椭圆形闭合的顶层轨道81以及多个顶层托运车82,顶层轨道81与上行通道11和下行通道12衔接,顶层托运车82可滑动于顶层轨道81上,轿厢1通过顶层托运车82在各井道9之间切换位置。当上行的轿厢1通过上行通道11到达顶层后,由顶层托运车82转移到下行通道12,实现轿厢的循环运行。
本发明的系统还包括智能控制系统。智能控制系统包括重量检测模块、传感模块、处理模块和安全模块,重量检测模块安装于轿厢1上,用于记录各时间段、各楼层的轿厢重量,即客流量,并将数据传送给处理模块进行存储建立数据库。传感模块用于检测轿厢的运行速度、温度,并将检测到的数据传送至处理模块。处理模块根据数据库的数据分析确定人流高峰期和高频率楼层,来分配待运行的轿厢1数量,提高运送效率。当处理器判断系统出现故障时,对安全模块发出信号,安全模块减少放行的轿厢1数量。
处理模块控制轿厢1以及各个轨道在夜间或凌晨进行自检:轿厢1空载在轨道上完成一个完整的循环,保证每个轿厢1在每条轨道上都运行一次,整个系统的每个部分都工作一次。通过传感模块的传感器检测,掌握电梯的运行情况,发现系统的异常部件,排查安全问题。轿厢1并行包括上、下行轨道与上、下行乘客出入轨道的并行,各单元之间的并行以及上下并行。轿厢1在上/下运行轨道运行,当乘客按下呼叫按钮,轿厢1进入上/下行乘客出入轨道接送乘客,上/下运行行轨道内的其他轿厢照常运行;轿厢1在某一单元上、下乘客时,不对其他单元内的轿厢1运行产生影响;上行运行轨道与下行运行轨道独立,各轿厢1上行时,另一侧下行运行轨道内轿厢1的运行不受干扰。
某一处轨道出现故障后,电梯系统进入安全模式。安全模块减少放行的轿厢1数量,故障处附近切变轨道41或其他备用切变轨道41连通,备用出入口开放,轿厢1切变到其他轨道避开故障处,电梯系统持续运行。
双井道多轿厢并行电梯系统,在运行时,轨迹如图1所示,两个井道9内有多个轿厢1同时运行。
上行:当轿厢1在上行通道11内从1层载着乘客往上运行时,前一个轿厢1停在4层处上下乘客,该轿厢1运行至3层附近,切变轨道41展开,连通上行通道11和下行通道12,轿厢1进入下行通道12,3层处的切变轨道41收回,轿厢1在下行通道12内向上运行,6层处的切变轨道41展开,轿厢1沿切变轨道41回到上行通道11内,把乘客送到指定楼层。若途中受到其它轿厢的阻隔,则同样通过切变轨道41变换到下行通道12内避开堵塞轿厢1将所有乘客运送完毕后上行进入顶层轨道81,顶层托运车82内的齿条与上行通道11内的运行轨道对接,轿厢1驶入顶层托运车82。顶层托运车82沿顶层轨道81行驶,将轿厢1运送至下行通道12。
下行时:当轿厢1在下行通道12内从50层载着乘客往下运行时,前一个轿厢1停在46层处上下乘客,该轿厢1运行至47层附近,切变轨道41展开,连通上行通道11和下行通道12,轿厢1进上行通道11,47层处的切变轨道41收回,轿厢1在上行通道11内向下运行,44层处的切变轨道41展开,轿厢1沿切变轨道41回到下行通道12内,把乘客送到指定楼层。若途中受到其它轿厢的阻隔,则同样通过切变轨道41变换到上行通道11内避开堵塞;轿厢1持续下行装载乘客直至到达1层或者达到地下车库。确保轿厢1为空后继续下行至底层维护机构6,轿厢1在下行通道12口被转移托运车51沿环形轨道61运送到上行通道11上,上行抵达1层后,在电梯出入口装载乘客,继续向上运行,完成一个轿厢1的一次循环。轿厢1数量可根据实际要求进行调整,各轿厢1独立运行,互不干扰,周而复始。轿厢1出现故障后,可托运至维修轨道62,轿厢1的维修和维护工作在单独的维修轨道62内进行,避免对整体系统的运行造成干扰。
实施例2
图3和图4示出了本发明智能多轿厢电梯系统的第二种实施方式。本实施例与实施例1的区别在于,井道9设有三个。
本实施例中,井道9设有三个,包括上行通道11、下行通道12和辅助通道13,辅助通道13位于上行通道11和下行通道12之间,相邻的两个井道9之间设有切换机构4,轿厢1通过切换机构4切换于上行通道11和辅助通道13之间,或者切换于下行通道12和辅助通道13之间。
本实施例中,当所有切换轨道41均与运行轨道连接时,所有切换轨道41形成连续地“S”型且相邻切换轨道41的首尾连接。
本实施例中,轿厢1在上行或者下行过程中,当需要避开堵塞时,可以将上行或者下行的轿厢1通过切换轨道41切换到辅助通道13。
实施例3
图5和图6示出了本发明智能多轿厢电梯系统的第三种实施方式。本实施例与实施例1的区别在于,井道9设有四个。
本实施例中,井道9设有四个,依次包括上行通道11、辅助上行通道14、辅助下行通道15和下行通道12,相邻的两个井道9之间设有切换机构4,轿厢1通过切换机构4切换于上行通道11和辅助上行通道14之间、下行通道12和辅助下行通道15之间或者辅助上行通道14和辅助下行通道15之间。
本实施例中,相邻井道9内的切换机构4首尾衔接。
本实施例中,轿厢1在上行过程中,当需要避开堵塞时,可以将上行的轿厢1通过切换轨道41切换到辅助上行通道14。轿厢1在下行过程中,当需要避开堵塞时,可以将下行的轿厢1通过切换轨道41切换到辅助下行通道15。辅助上行通道14和辅助下行通道15之间只有在及其拥堵或者辅助上行通道14、辅助下行通道15其中一个通道出现轿厢1故障时才连通。
实施例4
图7和图8示出了本发明智能多轿厢电梯系统的第四种实施方式。本实施例与实施例1的区别在于,井道9设有六个。
本实施例中,井道9设有六个,依次包括上行通道11、辅助上行通道14、上行快速通道16、下行快速通道17、辅助下行通道15和下行通道12,相邻的两个井道9之间设有切换机构4,轿厢1通过切换机构4切换于相邻的井道9之间。
本实施例中,相邻井道9内的切换机构4首尾衔接。
本实施例中,轿厢1在上行过程中,当需要避开堵塞时,可以将上行的轿厢1通过切换轨道41切换到辅助上行通道14。轿厢1在下行过程中,当需要避开堵塞时,可以将下行的轿厢1通过切换轨道41切换到辅助下行通道15。如果有乘客从1楼上行到顶部楼层附近或者从顶部楼层附近下行到1层,就可以将轿厢1切换至上行快速通道16或下行快速通道17直接上行或者下行。上行快速通道16和下行快速通道17之间只有在及其拥堵或者上行快速通道16、下行快速通道17其中一个通道出现轿厢1故障时才连通。
实施例5
图21至图23示出了本发明智能多轿厢电梯系统的第五种实施方式。本实施例与实施例1的区别在于,切换机构4的结构不同。
每个轿厢1由四个动力单元,一个可申缩的滑轨44和一组滑轮45组成。轿厢1通过滑轮45固定在滑轨44上,并可以左右滑动,滑轨44可以申缩,实现不同轨道之间的切换,四个动力单元分为两组,在原轨道咬合使用其中一组,并提供提升动力,轨道切换过程中,另一组咬合目标轨道,咬合过程为无动力状态,咬合完成合,开始提供动力,承担轿厢1动力源,原动力单元停止提供动力,并释放原轨道咬合,收回滑轨44,完成轨道切换。
实施例6
图24至图27示出了本发明智能多轿厢电梯的第六种实施方式。本实施例的智能多轿厢电梯系统,包括主轨道机构2、副轨道机构3、切换机构4、转移机构5、底层维护机构6、动力机构7以及多个轿厢1。切换机构4衔接主轨道机构2和副轨道机构3,轿厢1通过切换机构4在主轨道机构2和副轨道机构3之间切换;转移机构5设于楼层位于地面上的第一层,多个轿厢1通过转移机构5移动于第一层的多个电梯口;底层维护机构6设于楼层位于地面下的地下室,底层维护机构6位于主轨道机构2和副轨道机构3的底部,底层维护机构6与第一层的每个电梯口连接;轿厢1通过动力机构7驱动做上下运动或切换运动;运行时,多个轿厢1同时在主轨道机构2内上行或下行,每个轿厢1通过切换机构4分别从主轨道机构2切换到副轨道机构3上、下乘客。
本实施例中,所有轨道成对布设。
本实施例中,主轨道机构2和副轨道机构3按楼层层数分为n个单元,每个单元的楼层数根据实际应用情况而定。每个单元的上端和下端设置切换机构4,上端和下端的切换轨道41对称布置。
本实施例中,主轨道机构2包括上行主轨道21和下行主轨道22,副轨道机构3包括上行副轨道31和下行副轨道32,上行副轨道31和下行副轨道32位于上行主轨道21和下行主轨道22之间,楼层位于上行副轨道31和下行副轨道32之间。多个轿厢1可以同时在上行主轨道21和下行主轨道22上运行。
本实施例中,切换机构4包括多个切换轨道41和切换驱动42。切换轨道41呈弧形,两端为斜角状,并沿轿厢1上行或下行方向切换轨道41成对间隔设置。切换轨道41成对使用时,其中一个切换轨道41位于上行主轨道21中间或下行主轨道22中间,另一个切换轨道41位于上行副轨道31中间或下行副轨道32中间,每个切换轨道41设置一个切换驱动42,切换轨道41的中间通过铰链铰接于井道。切换驱动42采用液压千斤顶。如图16(a)和图16(b)所示,切换轨道41通过液压千斤顶带动旋转,展开时连接主轨道机构2和副轨道机构3,旋转收回时远离主轨道机构2和副轨道机构3,竖直固定在主轨道机构2和副轨道机构3的井道内。
本实施例中,上行主轨道21、下行主轨道22、上行副轨道31、下行副轨道32和切换轨道41均为齿条轨道,齿条轨道由钢架23、固定槽24和齿条25构成,钢架23一侧布设齿条25,另一侧布设固定槽24,齿条25和动力机构7啮合,固定槽24和动力机构7咬合。电梯供电、信号轨道安装在固定槽24的一侧。每根齿条轨道安装两条供电/信号线轨道,分别与动力机构7相连。
如图17(a)~图17(c)所示,当轿厢1要从主轨道机构2切变到副轨道机构3时,动力机构7接收到控制信号,液压千斤顶作用在切变轨道41的变轨支点上,推动切变轨道41展开,连通主轨道机构2和副轨道机构3。轿厢1进入副轨道机构3后,液压千斤顶逐渐减少施加在切变轨道41上的推力,切变轨道41收回,主轨道机构2和副轨道机构3恢复正常运行。
本实施例中,转移机构5包括转移托运车51和多个转移轨道52,第一层设有多个电梯口,多个电梯口分两排布置,每个电梯口设置一个转移托运车51,主轨道机构2衔接于转移轨道52的中间,转移托运车51在转移轨道52上移动,每个转移托运车51通过转移轨道52与主轨道机构2连接,轿厢1通过转移托运车51运送到每个电梯口。转移托运车51的底部设有万向行走轮,可在多个方向上运动,转弯时轿厢1不转动,轿厢1在两条垂直方向的轨道上转移时保持平动。轿厢1上行时由转移托运车51从各电梯口沿转移轨道52运送至上行主轨道21上行,下行轿厢1沿下行主轨道22到达第一层后,由转移托运车51托运至各电梯口下卸乘客。
本实施例中,底层维护机构6包括环形轨道61和转移托运车51,主轨道机构2与环形轨道61的中间连接。下行轿厢1在第一层停靠完毕后沿第一层继续下行到地下室的环形轨道61。到达地下室后,轿厢1从轨道口被转移托运车51沿环形轨道61运送到另一侧的环形轨道61上,并随机派送至各上行通道。
本实施例中,底层维护机构6还包括维修轨道62,维修轨道62设有两个,且分别垂直于环形轨道61的两侧设置。轿厢1出现故障或需要检修维护时,被托运至维修轨道62,对其它轿厢1的运行不造成干扰。
本实施例中,转移轨道52、环形轨道61和维修轨道62均为齿条轨道,齿条轨道由钢架23、固定槽24和齿条25构成,钢架23一侧布设齿条25,另一侧布设固定槽24,齿条25和动力机构7啮合,固定槽24和动力机构7咬合。
本实施例中,动力机构7包括主动力机构和切换动力机构。主动力机构包括电机71、齿轮72、爬行轴承73、支撑板74和安装架75,安装架75为“∟”型钢板,支撑板74安装于安装架75的一边,支撑板74与安装架75之间设有减震器741。电机71和爬行轴承73安装于支撑板74上,齿轮72通过电机71驱动,齿轮72与齿条25啮合,爬行轴承73与固定槽24咬合。齿轮72的传动杆一侧安装稳定轴承,保证运行过程的平稳。支撑板74上位于爬行轴承73的两端设置控制器,接收电源和信号。
切换动力机构包括滚轴导轨76、弹簧77和限位装置,安装架75的另一边固定于滚轴导轨76的滑杆761上,滚轴导轨76的滑块762固定于轿厢1上,滑杆761滑设于滑块762中;弹簧77的一端通过一弹簧固定板771固定与轿厢1上,另一端与限位装置固定连接,限位装置与滑杆761连接,限位装置控制滑杆761滑动或固定,确保安全变轨。
本实施例中,限位装置包括轨道切变锁止器78和推动块79,轨道切变锁止器78安装于轿厢1上,推动块79固定于滑杆761上,弹簧77的另一端固定于推动块79上,轨道切变锁止器78位于推动块79与弹簧77连接的一侧,轨道切变锁止器78限制推动块79移动。
切换动力机构设有两个,安装架75固定于两个滑杆761上,滑块762设有四件,每个滑杆761上设置两件,安装架75位于两个滑块762之间。滑杆761的移动带主动力机构。变轨时触发轨道切变锁止器78,解除对滑杆761的锁定,切变轨道41对齿轮72和爬行轴承73的压力推动整个主动力机构的滑动,主动力机构推动弹簧77压缩,切换动力机构在切变轨道41斜角段的行程上完成收缩。轿厢1运行到切变轨道41另一端的斜角处时,轨道对切换动力机构的压力逐渐减小,主动力机构推动弹簧77伸长,推动主动力机构恢复到原来位置。
本实施例中,动力机构7设有四个,分别安装于轿厢1的相对两边,每边两个,对称分布。每个主动力机构上安装一个加速度传感器,实时监测齿轮72的震动情况,了解电梯各部件的工作情况,发现轨道和各轿厢1主动力机构的异常以及进行故障定位。四个动力机构7中①号动力机构7的控制器连接电源正级,②号动力机构7的控制器连接电源负级,③号动力机构7的控制器连接信号线的正级,④号动力机构7的控制器连接信号线的负级。
本实施例中,电梯还包括顶层轨道机构8,顶层轨道机构8包括椭圆形闭合的顶层轨道81以及多个顶层托运车82,顶层轨道81与主轨道机构2、副轨道机构3连接,顶层托运车82可滑动于顶层轨道81上,主轨道机构2、副轨道机构3通过顶层托运车82衔接。当上行轿厢1通过上行副轨道31到达顶层后,由顶层托运车82转移到下行副轨道32,实现电梯循环。
每个单元设有4层,底部单元从2层开始设置,以1~5层为例来说明本实施例智能多轿厢电梯的运行方法。
当1层有前往2~5层的乘客时,轿厢1在上行主轨道21运行至7层附近,切换轨道41展开,连通上行主轨道21和上行副轨道31,轿厢1进入上行副轨道31,从5层依次向下停靠上、下乘客,切换轨道41收回。停靠完毕后,2层处的切换轨道41展开,轿厢1回到上行主轨道21继续上行,到达下一个单元上、下乘客,直至最顶部一个单元。如图24所示,当轿厢1在运行单元内上、下乘客完毕,运行到n层的切变轨道41处时,再次通过切变轨道41进入上行副轨道31,运送到达最顶部单元的乘客。所有乘客运送完毕后,轿厢1在n-3层处切变到上行主轨道21,上行进入顶层轨道81。顶层托运车82内的齿条与上行主轨道21对接,轿厢1驶入顶层托运车82,被运送至下行副轨道32。轿厢1下行至n-1层,进入切变轨道41完成一个单元内的运行。持续下行结束最后一个单元的行程到达1层。轿厢1运行到下行副轨道32处,由转移托运车51转移到1层电梯口下放乘客。确保轿厢1为空后沿第一层到地下室的通道继续下行。轿厢1从轨道口被转移托运车51沿环形轨道61运送到另一侧的轨道上,随机派送至各上行到第一层的通道。如图所示,抵达第一层后,轿厢1在电梯口装载乘客,沿转移轨道52托运到上行主轨道21,继续向上运行,完成一次循环。轿厢1数量可根据实际要求进行调整,各轿厢1独立运行,互不干扰,周而复始。轿厢1出现故障后,可托运至维修轨道62,其它轿厢1的运行不受干扰。
以一栋80层的建筑为例,设定每个轿厢1限载10人,每个单元由4层组成,每个轿厢1停靠两个单元。根据各项参数,设计电梯最高运行速度为4m/s,则紧急制动加速度约为5m/s2,各轿厢1的最小安全距离约为4m。一般电梯开关门时间均为2s,每人出入电梯的时间为1s,在满载的情况下,电梯上客时间为14s,下客时间为42s,轨道切换需要10s,轿厢1在主轨道机构2运行80s,在副轨道机构3运行16s,因此一个轿厢1从第第一层运行到最上面两个单元耗时约162s,乘客到达目的楼层平均所需时间为94s,每两秒可安全上行一个轿厢1,则5分钟可运行150个/次,最大运载量可达1500人/次。
实施例7
图28至图33示出了本发明智能多轿厢电梯的第七种实施方式。
本实施例中,主轨道机构2和副轨道机构3按楼层层数分为n个单元,各单元包括的楼层可根据实际需求确定,每个单元均设置切换机构4。
本实施例中,主轨道机构2包括上行主链条轨道26和下行主链条轨道27,上行主链条轨道26和下行主链条轨道27上均固定设有多个轿厢提升平台28,每层设置一个轿厢提升平台28。每个轿厢1对应一个轿厢提升平台28,轿厢1在主轨道机构2时通过轿厢提升平台28做升降运动。轿厢提升平台28上设有定位凹槽281,轿厢1的底部设有与定位凹槽281配合定位的定位凸起。
本实施例中,主轨道机构2还包括辅助固定导轨29,轿厢1上设有稳定支撑架11,稳定支撑架11一端与轿厢1铰接,另一端与辅助固定导轨29配合连接,稳定支撑架11沿辅助固定导轨29滑动,稳定支撑架11通过气缸驱动转动与辅助固定导轨29连接或离开辅助固定导轨29。运行时轿厢1上的稳定支撑架11与辅助固定导轨29咬合,保证轿厢1的平稳运行,轿厢1要离开主轨道机构2时,稳定支撑架11向上旋转90°解除与辅助固定导轨29的锁定。
本实施例中,上行主链条轨道26和下行主链条轨道27设有四个,分别分布于轿厢1的四个角,每个上行主链条轨道26或下行主链条轨道27相应配设一个辅助固定导轨29。
本实施例中,副轨道机构3分为上行副机构和下行副机构,上行副机构和下行副机构位于上行主链条轨道26和下行主链条轨道27之间,楼层位于上行副机构和下行副机构之间,副轨道机构3包括曳引装置,每个单元设置一个曳引装置,曳引装置包括曳引箱33、曳引绳34和吊箱35,曳引箱33固定于每个单元的顶部,曳引绳34一端绕设于曳引箱33,另一端与吊箱35固定连接,吊箱35面对轿厢提升平台28的一侧设有轿厢1的进出口,曳引箱33通过曳引绳34带动吊箱35做升降运动。副轨道机构3还包括配重块36,配重块36和曳引绳34的一端固定连接。
本实施例中,切换机构4包括跳板43,跳板43铰接于吊箱35的侧面,跳板43通过气缸驱动转动贴紧吊箱35或者展开与轿厢提升平台28衔接。
本实施例中,轿厢提升平台28和吊箱35分别设有液压千斤顶,可推动轿厢1在主轨道机构2和副轨道机构3内的切换。
本实施例中,转移机构5包括转移托运车51、多个转移轨道52和辅助转移井道53,第一层设有多个电梯口,多个电梯口分两排布置,所有电梯口的电梯门不全相对设置,主轨道机构2和副轨道机构3垂直位于两排电梯口之间,副轨道机构3位于上行主链条轨道26和下行主链条轨道27之间;辅助转移井道53设有两个,分别位于上行主链条轨道26和下行主链条轨道27的外侧;每个电梯口设置一个转移托运车51,副轨道机构3和电梯口之间或者通过辅助转移井道53和电梯口之间都通过转移轨道52衔接,转移托运车51在转移轨道52上移动,轿厢1通过转移托运车51运送到每个电梯口。
本实施例中,辅助转移井道53位于最底部的楼层单元,辅助转移井道53内设有曳引装置和切换机构4。
本实施例中,电梯还包括顶层轨道机构8,顶层轨道机构8包括椭圆形闭合的顶层轨道81、两个辅助提升井道83和至少一个顶层托运车82,顶层托运车82滑设于顶层轨道81上,上行副机构、下行副机构和辅助提升井道83通过顶层托运车82衔接。
本实施例中,辅助提升井道83设有两个,位于最顶部的楼层单元,辅助提升井道83位于主轨道机构2外侧,辅助提升井道83内设有曳引装置和切换机构4。
如图28和图29所示,轿厢1在上行主链条轨道26内匀速上行,当有n层~n+3层有乘客呼叫或轿厢1内有乘客到达n层~n+3层时,上行副机构内的吊箱35加速到与上行主链条轨道26相同的速度,跳板43展开与轿厢提升平台28连通锁定,稳定支撑架11向上旋转解除与辅助固定导轨29的锁定,轿厢1从轿厢提升平台28被推动到吊箱35内,跳板43收回,轿厢1被提升到n+3层后,依次向下运行,上、下乘客。n层上下乘客完毕后,吊箱35加速到与上行主链条轨道26保持相对静止,跳板43展开,轿厢1被推回主轨道机构2内,与辅助固定导轨29锁定,继续上行到其它单元。下行时运行方法相同。
如图30所示,轿厢1运行到接近顶层的单元时,若顶层单元内没有乘客呼叫电梯且轿厢1内没有到达顶层单元的乘客,则轿厢1进入上行的辅助提升井道83,被提升到顶层轨道81内,由顶层托运车82运送到下行的辅助提升井道83,然后切变到下行主链条轨道27内下行;若顶层单元内有乘客呼叫电梯或轿厢1内有到达顶层单元的乘客,轿厢1进入上行副机构运送乘客,运送完毕确保轿厢1为空后,轿厢1在上行副机构内被提升到顶层轨道81。
如图31所示,轿厢1下行到最下面的单元时,轿厢1内没有到达最下面单元的乘客,则轿厢1进入下行的辅助转移井道53运行到达第一层;若轿厢1内有到达最下面单元的乘客,轿厢1进入下行副机构运送乘客,然后到达第一层。
实施例8
本发明智能多轿厢电梯的第八种实施方式是采用直线电机作为动力机构。
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
Claims (25)
1.一种智能多轿厢电梯系统,其特征在于,包括至少两个井道(9)、切换机构(4)、动力机构(7)以及多个轿厢(1),所述井道(9)内设有轿厢(1)行走的轨道,相邻所述井道(9)之间设有切换机构(4),所述轿厢(1)通过切换机构(4)在相邻井道(9)之间切换位置;所述轿厢(1)通过动力机构(7)驱动在井道(9)内或者井道(9)之间做上行、下行运动或切换运动,所述轿厢(1)通过动力机构(7)驱动停靠于任意楼层上客或者下客;每个所述井道(9)内均设有运行轨道,所述轿厢(1)通过动力机构(7)的驱动沿运行轨道上行或者下行;所述切换机构(4)包括切换轨道(41),所述切换轨道(41)铰接于井道(9)内,所述切换轨道(41)沿井道(9)的长度方向设有多个;所述切换机构(4)还包括切换驱动(42)。
2.根据权利要求1所述的智能多轿厢电梯系统,其特征在于,所述系统包括至少两个相邻的井道(9),所述多个轿厢(1)可同时在井道(9)内进行上行或者下行运动;每层楼层均设有切换机构(4)。
3.根据权利要求2所述的智能多轿厢电梯系统,其特征在于,建筑上行电梯出入口和下行电梯出入口分别位于井道(9)的两侧。
4.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,上下相邻的切换轨道(41)首尾衔接,每个楼层均设置切换轨道(41)。
5.根据权利要求4所述的智能多轿厢电梯系统,其特征在于,所述切换轨道(41)成对设置,每个切换轨道(41)设置一个切换驱动(42),所述切换轨道(41)的中间铰接于井道,所述切换轨道(41)通过切换驱动(42)带动旋转与相邻井道(9)内的轨道连接或者断开。
6.根据权利要求5所述的智能多轿厢电梯系统,其特征在于,所述切换轨道(41)为弧形。
7.根据权利要求5所述的智能多轿厢电梯系统,其特征在于,所述切换驱动(42)为液压千斤顶,所述液压千斤顶固定于井道(9)内。
8.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,所述电梯系统还包括转移机构(5),所述转移机构(5)包括转移托运车(51)和多个转移轨道(52),每个电梯出入口对应一个转移托运车(51),所述井道(9)衔接于多个电梯出入口的侧面,所述转移托运车(51)在转移轨道(52)上移动,所述轿厢(1)通过转移托运车(51)在电梯出入口和井道(9)之间做移动。
9.根据权利要求3所述的智能多轿厢电梯系统,所述系统还包括底层维护机构(6),所述底层维护机构(6)位于楼层的第一层下方的底层,所述底层维护机构(6)包括环形轨道(61)和转移托运车(51),所述井道(9)位于环形轨道(61)上,所述轿厢(1)沿井道(9)下行至环形轨道(61),所述轿厢(1)通过转移托运车(51)在环形轨道(61)上移动,所述轿厢(1)不运行时停放在环形轨道(61)上。
10.根据权利要求9所述的智能多轿厢电梯系统,其特征在于,所述底层维护机构(6)还包括维修轨道(62),所述维修轨道(62)与环形轨道(61)的两侧连通。
11.根据权利要求2所述的智能多轿厢电梯系统,其特征在于,所述系统还包括顶层轨道机构(8),所述顶层轨道机构(8)位于楼层的顶层,所述顶层轨道机构(8)包括椭圆形闭合的顶层轨道(81)以及多个顶层托运车(82),所述顶层轨道(81)与井道(9)衔接,所述顶层托运车(82)可滑动于顶层轨道(81)上,所述轿厢(1)通过顶层托运车(82)在各井道(9)之间切换位置。
12.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,所述井道(9)设有两个,其中一个为上行通道(11),另一个为下行通道(12),所述切换机构(4)设于两个井道(9)之间,所述轿厢(1)通过切换机构(4)切换于上行通道(11)或者下行通道(12)之间。
13.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,所述井道(9)设有三个,包括上行通道(11)、下行通道(12)和辅助通道(13),所述辅助通道(13)位于上行通道(11)和下行通道(12)之间,相邻的两个所述井道(9)之间设有切换机构(4),所述轿厢(1)通过切换机构(4)切换于上行通道(11)和辅助通道(13)之间,或者切换于下行通道(12)和辅助通道(13)之间。
14.根据权利要求13所述的智能多轿厢电梯系统,其特征在于,所述上行通道(11)和辅助通道(13)之间的切换机构(4)与下行通道(12)和辅助通道(13)之间的切换机构(4)首尾衔接。
15.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,所述井道(9)设有四个,依次包括上行通道(11)、辅助上行通道(14)、辅助下行通道(15)和下行通道(12),相邻的两个所述井道(9)之间设有切换机构(4),所述轿厢(1)通过切换机构(4)切换于上行通道(11)和辅助上行通道(14)之间、下行通道(12)和辅助下行通道(15)之间或者辅助上行通道(14)和辅助下行通道(15)之间。
16.根据权利要求15所述的智能多轿厢电梯系统,其特征在于,相邻所述井道(9)内的切换机构(4)首尾衔接。
17.根据权利要求3所述的智能多轿厢电梯系统,其特征在于,所述井道(9)设有六个,依次包括上行通道(11)、辅助上行通道(14)、上行快速通道(16)、下行快速通道(17)、辅助下行通道(15)和下行通道(12),相邻的两个所述井道(9)之间设有切换机构(4),所述轿厢(1)通过切换机构(4)切换于相邻的井道(9)之间。
18.根据权利要求1所述的智能多轿厢电梯系统,其特征在于,所述系统还包括主轨道机构(2)、副轨道机构(3)、转移机构(5)、底层维护机构(6),所述切换机构(4)衔接主轨道机构(2)和副轨道机构(3),所述轿厢(1)通过切换机构(4)在主轨道机构(2)和副轨道机构(3)之间切换;所述转移机构(5)设于楼层位于地面上的第一层,多个所述轿厢(1)通过转移机构(5)移动于第一层的多个电梯口;所述底层维护机构(6)设于楼层位于地面下的地下室,所述底层维护机构(6)位于主轨道机构(2)和副轨道机构(3)的底部,所述底层维护机构(6)与第一层的每个电梯口连接;所述轿厢(1)通过动力机构(7)驱动做上下运动或切换运动;运行时,所述多个轿厢(1)同时在主轨道机构(2)内上行或下行,每个所述轿厢(1)通过切换机构(4)分别从主轨道机构(2)切换到副轨道机构(3)上、下乘客。
19.根据权利要求18所述的智能多轿厢电梯系统,其特征在于,所述主轨道机构(2)包括上行主轨道(21)和下行主轨道(22),所述副轨道机构(3)包括上行副轨道(31)和下行副轨道(32),所述上行副轨道(31)和下行副轨道(32)位于上行主轨道(21)和下行主轨道(22)之间,楼层进出通道位于上行副轨道(31)和下行副轨道(32)之间。
20.根据权利要求19所述的智能多轿厢电梯系统,其特征在于,所述切换机构(4)包括多个弧形的切换轨道(41)和切换驱动(42),沿轿厢(1)上行或下行方向所述切换轨道(41)成对间隔设置;成对使用时,其中一个切换轨道(41)位于上行主轨道(21)中间或下行主轨道(22)中间,另一个切换轨道(41)位于上行副轨道(31)中间或下行副轨道(32)中间,每个切换轨道(41)设置一个切换驱动(42),所述切换轨道(41)的中间铰接于井道,所述切换轨道(41)通过切换驱动(42)带动旋转连接主轨道机构(2)和副轨道机构(3)或者远离主轨道机构(2)和副轨道机构(3)。
21.根据权利要求20所述的智能多轿厢电梯系统,其特征在于,所述主轨道机构(2)和副轨道机构(3)按楼层层数分为n个单元,每个单元的上端和下端设置切换机构(4),上端和下端的切换轨道(41)对称布置。
22.根据权利要求18所述的智能多轿厢电梯系统,其特征在于,所述转移机构(5)包括转移托运车(51)和多个转移轨道(52),第一层设有多个电梯口,多个所述电梯口分两排布置,每个电梯口设置一个转移托运车(51),所述主轨道机构(2)衔接于转移轨道(52)的中间,所述转移托运车(51)在转移轨道(52)上移动,每个所述转移托运车(51)通过转移轨道(52)与主轨道机构(2)连接,所述轿厢(1)通过转移托运车(51)运送到每个电梯口。
23.根据权利要求22所述的智能多轿厢电梯系统,其特征在于,所述底层维护机构(6)包括环形轨道(61)和转移托运车(51),所述井道(9)位于环形轨道(61)上,所述轿厢(1)沿井道(9)下行至环形轨道(61),所述轿厢(1)通过转移托运车(51)在环形轨道(61)上移动,所述轿厢(1)不运行时停放在环形轨道(61)上。
24.根据权利要求23所述的智能多轿厢电梯系统,其特征在于,所述底层维护机构(6)还包括维修轨道(62),所述维修轨道(62)设有两个,且分别环形轨道(61)设置。
25.根据权利要求22所述的智能多轿厢电梯系统,其特征在于,所述转移托运车(51)的底部设有万向行走轮。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2017107148268 | 2017-08-19 | ||
| CN201710714826 | 2017-08-19 | ||
| CN201711237128 | 2017-11-30 | ||
| CN201711237128X | 2017-11-30 | ||
| PCT/CN2018/076634 WO2019037399A1 (zh) | 2017-08-19 | 2018-02-13 | 智能多轿厢电梯系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111108055A CN111108055A (zh) | 2020-05-05 |
| CN111108055B true CN111108055B (zh) | 2021-11-26 |
Family
ID=65439784
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880053712.6A Active CN111108055B (zh) | 2017-08-19 | 2018-02-13 | 智能多轿厢电梯系统 |
| CN201810942616.9A Active CN109422166B (zh) | 2017-08-19 | 2018-08-17 | 智能多井道电梯系统 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810942616.9A Active CN109422166B (zh) | 2017-08-19 | 2018-08-17 | 智能多井道电梯系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20200255261A1 (zh) |
| EP (1) | EP3670418A4 (zh) |
| JP (1) | JP6952244B2 (zh) |
| CN (2) | CN111108055B (zh) |
| WO (1) | WO2019037399A1 (zh) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200255261A1 (en) * | 2017-08-19 | 2020-08-13 | Libo Zhou | Smart multi-car elevator system |
| EP3650391B1 (en) * | 2018-11-06 | 2022-01-05 | KONE Corporation | A method, a multicar elevator system, and an operational entity for controlling movement of two or more elevator cars of a multicar elevator system |
| CN110155826A (zh) * | 2019-03-07 | 2019-08-23 | 湖南大举信息科技有限公司 | 用于电梯运行系统的驱动机构及多轿厢电梯运行系统 |
| CN110228741A (zh) * | 2019-05-07 | 2019-09-13 | 曼彻彼斯高新技术有限公司 | 竖井双轨升降系统及运行方法 |
| CN112311099B (zh) * | 2019-07-31 | 2023-08-18 | 湖南大举信息科技有限公司 | 用于无随行电缆电梯的供电系统及多轿厢电梯系统 |
| WO2021125519A1 (ko) * | 2019-12-17 | 2021-06-24 | 현대무벡스 주식회사 | 로봇용 순환식 수직반송 시스템 |
| CN112141855A (zh) * | 2020-08-31 | 2020-12-29 | 湖南大举信息科技有限公司 | 一种智能电梯系统及控制方法 |
| CN114249196B (zh) * | 2020-09-24 | 2024-08-09 | 湖南大举信息科技有限公司 | 用于多轿厢智能并行电梯的安全控制系统及安全运行方法 |
| CN115535796B (zh) * | 2020-11-09 | 2024-05-31 | 湖南大举信息科技有限公司 | 用于多轿厢智能电梯系统切轨运行的双向切轨设计方法 |
| CN115535784B (zh) * | 2020-11-13 | 2024-08-09 | 湖南大举信息科技有限公司 | 用于多轿厢智能电梯系统的自驱动方法 |
| CN115535785B (zh) * | 2020-11-21 | 2024-05-07 | 湖南大举信息科技有限公司 | 一种用于自驱式智能多轿厢并行电梯悬架的柔性布置方法 |
| CN112919272B (zh) * | 2021-02-26 | 2023-01-20 | 湖南大举信息科技有限公司 | 一种多轿厢并行电梯系统的切轨保护控制方法 |
| CN112850420B (zh) * | 2021-02-26 | 2023-04-18 | 湖南大举信息科技有限公司 | 一种多轿厢并行电梯系统的轨道布置方法 |
| CN113501401B (zh) * | 2021-08-16 | 2022-12-23 | 联想新视界(江苏)设备服务有限公司 | 一种电梯铺轨主轨安装装置 |
| CN114314264A (zh) * | 2022-01-07 | 2022-04-12 | 中国矿业大学 | 一种可“一井多梯”布置的摩擦爬轨驱动式无绳电梯系统 |
| JP7356651B1 (ja) | 2022-03-30 | 2023-10-05 | フジテック株式会社 | マルチカーエレベータの運行管理装置 |
| DE102022111441A1 (de) | 2022-05-09 | 2023-11-09 | Tk Elevator Innovation And Operations Gmbh | Aufzugsanlage mit Aufzugsschacht und Schott zum Unterteilen des Aufzugsschacht |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004269193A (ja) * | 2003-03-11 | 2004-09-30 | Hitachi Ltd | エレベーター装置 |
| JP2005132527A (ja) * | 2003-10-29 | 2005-05-26 | Hitachi Ltd | マルチカーエレベータ |
| CN201144130Y (zh) * | 2007-11-01 | 2008-11-05 | 郭亮 | 循环式多轿厢电梯 |
| CN101875465A (zh) * | 2009-04-28 | 2010-11-03 | 河南理工大学 | 一种无绳循环多轿厢电梯及其循环系统 |
| CN205257721U (zh) * | 2015-11-25 | 2016-05-25 | 佛山住友富士电梯有限公司 | 一种多轿厢式电梯 |
| CN106927337A (zh) * | 2017-05-09 | 2017-07-07 | 绳季清 | 高层建筑双通道直线蜗轮电梯井道 |
| CN107673162A (zh) * | 2017-08-19 | 2018-02-09 | 周立波 | 一种智能多轿厢电梯 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2756185B2 (ja) * | 1990-11-26 | 1998-05-25 | 株式会社竹中工務店 | エレベータ装置 |
| JP2708273B2 (ja) * | 1990-11-27 | 1998-02-04 | 株式会社竹中工務店 | エレベータ駆動装置 |
| JP3056885B2 (ja) * | 1992-06-25 | 2000-06-26 | 株式会社東芝 | 自走式エレベータ |
| JPH0616365A (ja) * | 1992-06-30 | 1994-01-25 | Hazama Gumi Ltd | ケージの昇降システムと昇降装置 |
| JP3017611B2 (ja) * | 1992-11-26 | 2000-03-13 | 株式会社竹中工務店 | エレベータ装置 |
| JP3324179B2 (ja) * | 1993-03-10 | 2002-09-17 | 三菱電機株式会社 | ロープレスエレベーター装置 |
| JPH07208571A (ja) * | 1994-01-20 | 1995-08-11 | Teijin Seiki Co Ltd | 直線駆動装置 |
| JP2000185885A (ja) * | 1998-12-18 | 2000-07-04 | Kawasaki Heavy Ind Ltd | 自走式エレベータシステム |
| DE50107625D1 (de) * | 2001-10-15 | 2006-02-16 | Thyssenkrupp Elevator Ag | Seilaufzugsystem mit zwei Fahrkörben mit gemeinsamen und getrennten Farhbahnabschnitten |
| JP2006027902A (ja) * | 2004-07-15 | 2006-02-02 | Inventio Ag | 互いに隣接して配置される少なくとも3つの垂直エレベータ昇降路を有するエレベータ設備およびそのようなエレベータ昇降路の動作方法 |
| JP4543868B2 (ja) * | 2004-10-15 | 2010-09-15 | 株式会社日立製作所 | マルチカーエレベータ |
| JP4552793B2 (ja) * | 2005-07-22 | 2010-09-29 | 株式会社日立製作所 | マルチカーエレベータの安全システム |
| CN103130069A (zh) * | 2011-11-22 | 2013-06-05 | 常州市福驰电动车辆科技有限公司 | 一种多轿厢链式循环电梯-楼梯复合垂直交通系统 |
| US10118799B2 (en) * | 2013-03-25 | 2018-11-06 | Otis Elevator Company | Multicar self-propelled elevator system |
| KR101445225B1 (ko) * | 2013-04-05 | 2014-09-29 | 홍익대학교 산학협력단 | 경성 레일 코어 이용 다방향, 다중 이송 유닛 및 시스템 |
| US9758347B2 (en) * | 2014-12-02 | 2017-09-12 | ThyssenKrupp Elevator AG; ThyssenKrupp AG | Arrangement and method to move at least two elevator cars independently in at least one hoistway |
| CN104671029B (zh) * | 2015-01-27 | 2017-02-01 | 四川大学 | 单向循环升降电梯 |
| US10689228B2 (en) * | 2015-02-04 | 2020-06-23 | Otis Elevator Company | Elevator system evaluation device |
| EP3292065B1 (en) * | 2015-06-26 | 2020-04-15 | Kone Corporation | Elevator with linear motor |
| CN204980742U (zh) * | 2015-10-08 | 2016-01-20 | 陈国安 | 单旋链式多轿厢平衡电梯 |
| WO2017093595A1 (en) * | 2015-11-30 | 2017-06-08 | Kone Corporation | Adjustable multicar elevator system |
| CN205312834U (zh) * | 2016-01-20 | 2016-06-15 | 彭俊 | 一种循环轨道式多轿厢电梯 |
| CN107487688B (zh) * | 2016-06-13 | 2021-03-23 | 奥的斯电梯公司 | 用于电梯系统的传感器和驱动电机学习运行 |
| CN205892445U (zh) * | 2016-08-19 | 2017-01-18 | 钟文沁 | 一种循环式垂直升降电梯轨道系统及具有其的电梯系统 |
| US20200255261A1 (en) * | 2017-08-19 | 2020-08-13 | Libo Zhou | Smart multi-car elevator system |
| DE102018205151A1 (de) * | 2018-04-05 | 2019-10-10 | Thyssenkrupp Ag | Verfahren zum Betreiben einer Aufzugsanlage |
| CN115535784B (zh) * | 2020-11-13 | 2024-08-09 | 湖南大举信息科技有限公司 | 用于多轿厢智能电梯系统的自驱动方法 |
| CN115535807A (zh) * | 2021-06-01 | 2022-12-30 | 湖南大举信息科技有限公司 | 一种多轿厢智能并行电梯的驱动系统 |
-
2018
- 2018-02-13 US US16/640,304 patent/US20200255261A1/en active Pending
- 2018-02-13 JP JP2020529790A patent/JP6952244B2/ja active Active
- 2018-02-13 CN CN201880053712.6A patent/CN111108055B/zh active Active
- 2018-02-13 WO PCT/CN2018/076634 patent/WO2019037399A1/zh active Application Filing
- 2018-02-13 EP EP18849034.6A patent/EP3670418A4/en active Pending
- 2018-08-17 CN CN201810942616.9A patent/CN109422166B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004269193A (ja) * | 2003-03-11 | 2004-09-30 | Hitachi Ltd | エレベーター装置 |
| JP2005132527A (ja) * | 2003-10-29 | 2005-05-26 | Hitachi Ltd | マルチカーエレベータ |
| CN201144130Y (zh) * | 2007-11-01 | 2008-11-05 | 郭亮 | 循环式多轿厢电梯 |
| CN101875465A (zh) * | 2009-04-28 | 2010-11-03 | 河南理工大学 | 一种无绳循环多轿厢电梯及其循环系统 |
| CN205257721U (zh) * | 2015-11-25 | 2016-05-25 | 佛山住友富士电梯有限公司 | 一种多轿厢式电梯 |
| CN106927337A (zh) * | 2017-05-09 | 2017-07-07 | 绳季清 | 高层建筑双通道直线蜗轮电梯井道 |
| CN107673162A (zh) * | 2017-08-19 | 2018-02-09 | 周立波 | 一种智能多轿厢电梯 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200255261A1 (en) | 2020-08-13 |
| EP3670418A4 (en) | 2021-01-06 |
| CN109422166A (zh) | 2019-03-05 |
| WO2019037399A1 (zh) | 2019-02-28 |
| JP6952244B2 (ja) | 2021-10-20 |
| CN109422166B (zh) | 2020-09-08 |
| EP3670418A1 (en) | 2020-06-24 |
| CN111108055A (zh) | 2020-05-05 |
| JP2020530828A (ja) | 2020-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111108055B (zh) | 智能多轿厢电梯系统 | |
| CN109422161B (zh) | 一种智能多轿厢电梯 | |
| KR102139511B1 (ko) | 수직 및 수평 이동 시스템 | |
| US5758748A (en) | Synchronized off-shaft loading of elevator cabs | |
| US20090081010A1 (en) | Inclined Conveyance for Multi-storied Automotive Parking | |
| CN1076313C (zh) | 输送乘客的、带有双层隔板电梯的多电梯往复运输系统 | |
| CN211254881U (zh) | 一种曳引驱动的多轿厢共享多井道循环运行电梯 | |
| JP2006240799A (ja) | 自動車用エレベーター装置 | |
| CN102408053B (zh) | 多层升降机 | |
| CN110790111A (zh) | 一种曳引驱动的多轿厢共享多井道循环运行电梯 | |
| CN108996372B (zh) | 电梯系统及其工作方法 | |
| CN109436993A (zh) | 一种多轿厢垂直电梯 | |
| US1819513A (en) | Garage elevator | |
| WO2000030967A1 (en) | A multi-cage lift in pair | |
| US5695024A (en) | Car operated safety gate for horizontally transferrable elevator cab | |
| CN102616630A (zh) | 单向电梯及其运行方法 | |
| CN117800194A (zh) | 多轿厢并行电梯系统提前检测层门开关的方法 | |
| CN112960510B (zh) | 一种升降梯 | |
| CN1072184C (zh) | 自动升降阶梯 | |
| CN213294363U (zh) | 一种楼道电梯装置 | |
| EP0563035A1 (en) | Improvements to lifts | |
| CN118495298A (zh) | 一种大容量运输系统及运输方法 | |
| JPH0772072B2 (ja) | 複数の籠が昇降手段に設置の複数レーン付き高速エレベーター | |
| CN113734935A (zh) | 一字阵列分布的单个电梯井多个轿箱的电梯运行系统 | |
| RU69508U1 (ru) | Винтовой эскалатор |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20211104 Address after: 410205 No. 904, building A2, huanchuang Park, 2450 Yuelu West Avenue, high tech Development Zone, Changsha, Hunan Applicant after: HUNAN DAJU INFORMATION TECHNOLOGY Co.,Ltd. Address before: 413000 No. 518 Yingbin East Road, Heshan District, Yiyang City, Hunan Province Applicant before: Zhou Libo |
|
| TA01 | Transfer of patent application right | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |