CN110710117B - 便携设备、便携设备的控制方法 - Google Patents
便携设备、便携设备的控制方法 Download PDFInfo
- Publication number
- CN110710117B CN110710117B CN201880036316.2A CN201880036316A CN110710117B CN 110710117 B CN110710117 B CN 110710117B CN 201880036316 A CN201880036316 A CN 201880036316A CN 110710117 B CN110710117 B CN 110710117B
- Authority
- CN
- China
- Prior art keywords
- vehicle
- state
- radio wave
- vibration
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
- B60R25/245—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user where the antenna reception area plays a role
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B49/00—Electric permutation locks; Circuits therefor ; Mechanical aspects of electronic locks; Mechanical keys therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B1/00—Details of transmission systems, not covered by a single one of groups H04B3/00 - H04B13/00; Details of transmission systems not characterised by the medium used for transmission
- H04B1/38—Transceivers, i.e. devices in which transmitter and receiver form a structural unit and in which at least one part is used for functions of transmitting and receiving
- H04B1/3822—Transceivers, i.e. devices in which transmitter and receiver form a structural unit and in which at least one part is used for functions of transmitting and receiving specially adapted for use in vehicles
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q9/00—Arrangements in telecontrol or telemetry systems for selectively calling a substation from a main station, in which substation desired apparatus is selected for applying a control signal thereto or for obtaining measured values therefrom
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W12/00—Security arrangements; Authentication; Protecting privacy or anonymity
- H04W12/06—Authentication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W12/00—Security arrangements; Authentication; Protecting privacy or anonymity
- H04W12/60—Context-dependent security
- H04W12/63—Location-dependent; Proximity-dependent
- H04W12/64—Location-dependent; Proximity-dependent using geofenced areas
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W48/00—Access restriction; Network selection; Access point selection
- H04W48/02—Access restriction performed under specific conditions
- H04W48/04—Access restriction performed under specific conditions based on user or terminal location or mobility data, e.g. moving direction, speed
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W88/00—Devices specially adapted for wireless communication networks, e.g. terminals, base stations or access point devices
- H04W88/08—Access point devices
- H04W88/085—Access point devices with remote components
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Computer Security & Cryptography (AREA)
- Mechanical Engineering (AREA)
- Lock And Its Accessories (AREA)
- Mobile Radio Communication Systems (AREA)
- Transceivers (AREA)
- Selective Calling Equipment (AREA)
Abstract
一种便携设备,通过与搭载于车辆(1)的无线通信设备(10)进行通信,能够对该无线通信设备发送认证信号,该便携设备包括:接收部(101),接收来自无线通信设备的电波;发送部(102),在接收到的电波是请求发送认证信号的电波的情况下,发送认证信号;振动检测部(103),检测有无振动;和工作控制部(104),在检测到振动的情况下设为使接收部和发送部均工作的可通信状态,在未检测到振动的情况下设为使接收部和发送部中的至少一者停止工作的禁止通信状态。工作控制部在可通信状态下接收到来自无线通信设备的电波时,即使未检测到振动也设为使接收部和发送部均工作的可继续通信状态。
Description
关联申请的相互参照
本申请基于2017年7月3日提交的日本特许申请编号2017-130729号,并在此援引其记载内容。
技术领域
本公开涉及通过与搭载于车辆的无线通信设备进行通信而能够对无线通信设备发送认证信号的便携设备和便携设备的控制方法。
背景技术
为了消除在每次对车辆车门进行解锁时必须拿出钥匙的繁琐,开发出了被称为被动进入的技术,该技术当前已广泛使用,该技术中,车辆在检测到人的靠近时判断可否将车门解锁,由此自动解锁。
该技术中,在车辆搭载有具有认证功能的无线通信设备(以下,车载通信设备),通过与要乘入车辆的人所携带的小型无线通信设备(以下,便携设备)进行通信,认证该便携设备是否为正规的便携设备。而且,在认证通过而判断为是正规的便携设备的情况下,将车辆车门解锁或准备解锁。
在此,便携设备因携带使用的关系,利用来自电池的电力而工作。因此,对于便携设备,要求抑制电池的消耗。为此,提出了如下技术,即:在便携设备内置振动传感器,在未检测到振动的情况下判断为便携设备未被使用,即使来自车载通信设备的电波到达也不接收电波(专利文献1)。
像这样,能够在便携设备不被使用的期间避免其与车载通信设备徒劳地进行无线通信而导致电池消耗的情况。另外,还能够防止如下被称为中继攻击的盗窃损失,即例如来自停在车库的车辆的电波通过中继器而被传送到玄关处,从而放在玄关内的便携设备识别电波而回复认证信号,导致车辆车门非正常地解锁。
现有技术文献
专利文献
专利文献1:日本特开2016-089563号公报
发明内容
但是,在上述专利文献1的技术中,若便携设备处于车室内时成为不再检测其振动而不接收来自车载通信设备的电波的状态,则存在车载通信设备无法识别处于车室内的便携设备的问题。
本公开是鉴于现有技术所具有的上述问题点而完成的,其目的在于提供一种便携设备和便携设备的控制方法,能够避免车载通信设备无法识别存在于车室内的便携设备的情况。
本公开的一个方式的便携设备通过与搭载于车辆的无线通信设备进行通信,能够对该无线通信设备发送认证信号,包括:接收部,其接收来自无线通信设备的电波;发送部,其在接收到的电波是请求发送认证信号的电波的情况下,发送认证信号;振动检测部,其检测有无振动;以及工作控制部,其在检测到振动的情况下设为使接收部和发送部均工作的可通信状态,在未检测到振动的情况下设为使接收部和发送部中的至少一者停止工作的禁止通信状态。工作控制部在可通信状态下接收到来自无线通信设备的电波时,即使未检测到振动也设为使接收部和发送部均工作的可继续通信状态。
本公开的另一方式的便携设备的控制方法中,该便携设备通过与搭载于车辆的无线通信设备进行通信,能够对该无线通信设备发送认证信号,便携设备的控制方法包括:检测便携设备有无振动;在未检测到振动的情况下,设为禁止通信状态,其中,在禁止通信状态下,使接收来自无线通信设备的电波的功能和对无线通信设备发送认证信号的功能中的至少一者停止;在检测到振动的情况下,设为可通信状态,其中,在可通信状态下,使接收来自无线通信设备的电波的功能和对无线通信设备发送认证信号的功能均工作;在可通信状态下接收到来自无线通信设备的电波时,即使未检测到振动也使可通信状态继续。
根据上述便携设备和便携设备的控制方法,在便携设备被带入车室内之前,能够接收来自无线通信设备的电波并使可通信状态继续。因此,在便携设备被带入车室内之后,即使未检测到振动,也保持为能够与车载通信设备之间收发电波的状态,从而车载通信设备能够识别车室内的便携设备。
附图说明
本公开的上述目的及其他目的、特征和/或优点将通过参照附图进行的下文的详细记述变得更为明确。该附图如下:
图1是具有使用者所携带的便携设备和搭载于车辆的车载通信设备的被动进入系统的说明图。
图2是表示本实施例的便携设备的内部构造的说明图。
图3是表示无法再识别存在于车室内的便携设备的理由的说明图。
图4是表示由本实施例的便携设备进行的工作状态控制处理的前半部分的流程图。
图5是表示本实施例的工作状态控制处理的后半部分的流程图。
图6是示意地表示本实施例的便携设备切换工作状态的情形的说明图。
图7A是例示使用者正于来自车辆的电波相对于本实施例的便携设备的到达范围外移动的情况的说明图。
图7B是例示使用者在来自车辆的电波相对于本实施例的便携设备的到达范围外停步的情况的说明图。
图8是例示本实施例的便携设备处于来自车辆的电波的到达范围内的情况的说明图。
图9是例示本实施例的便携设备处于车辆的车室内的情况的说明图。
具体实施方式
以下,对用于明确本公开的内容的实施例进行说明。
图1中例示了被动进入系统1s,该被动进入系统1s具有使用者所携带的便携设备100和搭载于车辆1的车载通信设备(VH COMM)10。本公开中,车载通信设备10相当于搭载于车辆的无线通信设备。如图所示,车载通信设备10包括:向车辆1的外部发送电波或者接收来自外部的电波的外部天线10a;和向车辆1的车室内发送电波或者接收来自车室内的电波的内部天线10b。
被动进入系统1s的车载通信设备10以一定周期从外部天线10a发送电波,探索存在于车辆1周围的便携设备100。因此,当车辆1的使用者携带便携设备100靠近车辆1时,在进入来自外部天线10a的电波的到达范围内的时刻,便携设备100接收该电波,并且,对该电波进行回信。车载通信设备10像这样接收从便携设备100回复的电波,由此能够识别车辆1周围存在便携设备100。
然后,车载通信设备10在识别到便携设备100的存在时,发送电波以请求认证信号的发送,接收到该电波的便携设备100通过电波回复认证信号。在像这样接收到来自便携设备100的认证信号之后,基于该认证信号,对便携设备100是否为正规的便携设备100进行认证。而且,在认证通过而确认是正规的便携设备100之后,将车辆1的车门解锁,或者进行准备以使得能够立即解锁。像这样,能够实现所谓的被动进入。
另外,在携带便携设备100的使用者乘入车辆1后,车载通信设备10使用内部天线10b与存在于车室内的便携设备100进行通信。其结果是,使用者即使不拿出便携设备100,也能够按下发动机启动按钮使发动机启动。或者,也能够识别出便携设备100存在于车室内,而防止将便携设备100关在车室内的情况。
图2示出为了实现被动进入,本实施例的便携设备100所具备的内部构造。如图所示,为了实现被动进入,本实施例的便携设备100具备接收部101、发送部102、振动检测部103、工作控制部104等。
此外,上述的“部”是着眼于便携设备100为了实现被动进入所具备的功能,方便起见而将便携设备100的内部分类得到的抽象概念,并不表示便携设备100在物理上被划分为上述的“部”。因此,上述的“部”既可以作为由CPU执行的计算机程序得以实现,也可以作为包含LSI的电子电路得以实现,还可以作为它们的组合得以实现。
接收部101与接收用天线101a连接,接收从车载通信设备10发送来的电波,并输出到工作控制部104。
发送部102与发送用天线102a连接,在工作控制部104的控制下,向外部发送电波。
此外,在本实施例的便携设备100中,电波的接收使用被称为LF波的波长长的电波,发送使用被称为RF波的波长短的电波,伴随于此,接收用天线101a和发送用天线102a分别成为专用的天线。当然,在对收发使用相同波长的电波的情况下,可以利用一个天线兼作接收用天线101a和发送用天线102a。
振动检测部103检测便携设备100有无振动,并将其结果输出到工作控制部104。此外,作为振动检测部103,能够使用振动传感器、陀螺仪传感器、加速度传感器等各种传感器。
工作控制部104在收到接收部101所接收的电波后,根据其内容,将表示便携设备100的存在的信号、认证所使用的信号输出到发送部102并作为电波发送。因此,根据发送的电波的内容,从便携设备100向搭载于车辆1的车载通信设备10回复对应的内容的电波,从而能够实现所谓的被动进入。
另外,在振动检测部103不再检测到振动的情况下,工作控制部104判断为便携设备100未被使用(例如保管于保管场所等),停止接收部101和发送部102中的至少一者的工作。这样一来,能够抑制驱动便携设备100的电池的消耗,并且,还能够避免便携设备100对使用电波的中继器从较远车辆1传送来的电波作出响应而导致车辆1的车门被非正常地解锁的隐患。
此外,当接收部101和发送部102中的至少一者的工作停止时,便携设备100无法再与车载通信设备10进行通信。因此,以下将接收部101和发送部102中的至少一者的工作停止的状态称为“禁止通信状态”。
之后,在使用者拿起便携设备100时由振动检测部103检测到振动,因此使接收部101和发送部102均工作。这样一来,能够实现被动进入。
此外,在使接收部101和发送部102均工作时,便携设备100能够与车载通信设备10进行通信。因此,以下将接收部101和发送部102均工作的状态称为“可通信状态”。
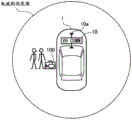
不过,在根据有无振动而将便携设备100切换为禁止通信状态和可通信状态的情况下,存在车载通信设备10无法识别车室内的便携设备100的隐患。例如,图3中携带便携设备100的使用者如粗虚线箭头所示那样返回家中,将便携设备100放置于置物架上的情况等时,即使将便携设备100设为禁止通信状态也不会产生任何问题。
但是,如图中粗点划线箭头所示,使用者与便携设备100一起乘入车辆1后,有可能便携设备100无法再检测到振动。尤其是,使用者将便携设备100放入包中并携带的情况下,使用者乘入车辆1后,包被放置在座位或者底板上,因此通过便携设备100无法检测振动的可能性变高。而且,若在这些情况下将便携设备100设为禁止通信状态,则存在车载通信设备10无法再识别车室内的便携设备100而导致将便携设备100关在车室内或者无法使发动机启动的隐患。
于是,为了避免在不再检测到振动后使便携设备100为禁止通信状态,并且车载通信设备10无法识别车室内的便携设备100,本实施例的便携设备100进行如下控制。
图4和图5示出本实施例的便携设备100切换包含可通信状态、禁止通信状态在内的多个工作状态的工作状态控制处理的流程图。该处理是由便携设备100的工作控制部104执行的处理。
如图4所示,在开始工作状态控制处理后,首先,判断是否检测到振动(S100)。便携设备100是使用者携带并使用的装置,当便携设备100被携带时,便携设备100理应会振动。反而言之,在便携设备100不振动的情况下认为未被使用。
于是,在未检测到振动的情况下(S100:否),判断便携设备100的工作状态是否为禁止通信状态(S101)。如上所述,禁止通信状态是,因便携设备100接收电波的功能和发送电波的功能中的至少一者停止,而便携设备100无法与车载通信设备10进行无线通信的状态。在其结果为便携设备100的工作状态已成为禁止通信状态的情况下(S101:是),无需使工作状态再次成为禁止通信状态,因此返回到开始处,判断是否检测到振动(S100)。
与之相对,在虽未检测到振动(S100:否)但尚未成为禁止通信状态的情况下(S101:否),此次判断是否处于缓冲时间的计时中(S102)。在此,缓冲时间是从不再检测到振动起至切换为禁止通信状态为止的缓冲时间。即使不再检测到振动,如果在经过缓冲时间为止的期间检测到振动,则便携设备100也不会切换至禁止通信状态。缓冲时间设定为适当的时间(例如15秒)。
在S102的判断中,在判断为不处于缓冲时间的计时中的情况下(S102:否),通过使未图示的计时器起动而开始缓冲时间的计时(S103)。与之相对,在处于缓冲时间的计时中的情况下(S102:是),不重新开始计时,判断是否经过了缓冲时间(S104)。
在其结果为经过了缓冲时间的情况下(S104:是),将便携设备100的工作状态设定为禁止通信状态(S105),然后返回到开始处,判断是否检测到振动(S100)。并且,在未检测到振动的情况下(S100:否),在接下来的S101中,判断为处于禁止通信状态中(S101:是),至检测到振动为止(S100:是)使便携设备100的工作状态保持为禁止通信状态。
与之相对,在未经过缓冲时间的情况下(S104:否),便携设备100的工作状态成为切换至禁止通信状态前的状态(即,接收电波的功能和发送电波的功能均工作的可通信状态)。于是,判断是否接收到来自车辆1的电波(S108)。便携设备100只有存在于来自车辆1的电波的到达范围内,才接收来自车辆1的电波,因此大多数情况下判断为未接收到电波(S108:否),返回处理的开始处,判断是否检测到振动(S100)。
在其结果为未检测到振动的情况下(S100:否),不处于禁止通信状态中(S101:否),且处于缓冲时间的计时中(S102:是),尚未经过缓冲时间(S104:否),判断为未接收到来自车辆1的电波(S108:否)。其结果,再次返回到开始处,判断是否检测到振动(S100)。
在反复进行这样的操作中,不久将经过缓冲时间(S104:是),便携设备100的工作状态被设定为禁止通信状态(S105),因此,之后直至检测到振动为止(S100:是),使便携设备100的工作状态保持为禁止通信状态。
另外,在检测到振动的情况下(S100:是),判断便携设备100的工作状态是否处于可通信状态(S106)。在其结果为未处于可通信状态的情况下(S106:否),将便携设备100的工作状态设定为可通信状态(S107),之后判断是否接收到来自车辆1的电波(S108)。与之相对,在工作状态已成为可通信状态的情况下(S106:是),判断是否接收到来自车辆1的电波(S108)。
如上所述,在便携设备100处于来自车辆1的电波不会到达的场所的期间,若检测到振动则成为可通信状态,若未检测到振动则成为禁止通信状态,反复成为这两个工作状态。
但是,在使用者携带便携设备100向车辆1移动时,检测到其振动而使便携设备100成为可通信状态(S107),并且,在进入来自车辆1的电波的到达范围内时,便携设备100接收该电波(S108:是)。
在接收到来自车辆1的电波之后(S108:是),此次判断该电波是否为向车内电波(图5的S109)。如使用图1在前所述那样,搭载于车辆1的车载通信设备10能够使用外部天线10a以一定周期向车辆1周围发送电波,并且,还能够使用内部天线10b向车室内发送电波。在此,向车内电波是车载通信设备10使用内部天线10b向车室内发送的电波。此外,对应于将车载通信设备10使用内部天线10b向车室内发送的电波称为向车内电波,以下,将车载通信设备10使用外部天线10a向车辆1周围发送的电波称为向车外电波。
通常情况下,使用者从车辆1外部靠近车辆1,与向车内电波相比先接收向车外电波,因此,在S109中判断为“否”。并且,在S109中判断为“否”的情况下,开始延长时间的计时(S110)。延长时间所表示的内容将在后文叙述,延长时间设定为与上述缓冲时间相比充分长的时间(例如,30分钟)。
接着,判断是否经过了延长时间(S111),在未经过的情况下(S111:否),判断是否接收到向车内电波(S112)。便携设备100存在于车辆1外部的期间,不会接收到向车内电波,因此在S112中判断为“否”,再次判断是否经过了延长时间(S111)。即,本实施例的便携设备100在接收到来自车辆1的向车外电波后,至延长时间经过为止,即使未检测到振动也维持可通信状态。根据以上可以明确,延长时间是在接收到向车外电波后,无论是否检测到振动,均将便携设备100的工作状态保持为可通信状态的时间。
而且,在经过了延长时间之后(S111:是),返回处理的开始处,判断是否检测到振动(图4的S100),然后反复进行上述接下来的一系列操作。
与之相对,在判断为从车辆1接收的电波为向车内电波的情况下(S109:是)、或者如上所述在接收到向车外电波后对延长时间进行计时的中途接收到向车内电波的情况下(S112:是),此次将便携设备100的工作状态设定为可继续通信状态(S113)。可继续通信状态所表示的内容将在后文叙述,可继续通信状态与上述可通信状态同样为便携设备100能够发送和接收电波的工作状态。
之后,判断是否接收到向车外电波(S114),在未接收到向车外电波的情况下(S114:否),反复进行相同的判断直至接收到为止。
而且,在接收到向车外电波之后(S114:是),将便携设备100的工作状态设定为可通信状态(S115)。即,本实施例的便携设备100在接收到向车内电波而成为可继续通信状态后,至接收到向车外电波为止,继续作为能够收发电波的工作状态的可继续通信状态。如此,可继续通信状态是至接收到向车外电波为止保持能够收发电波的工作状态。
另外,接收到向车外电波(S114:是),将工作状态设定为可通信状态后(S115),开始延长时间的计时(S110)。
图6示意地示出本实施例的便携设备100通过执行上述处理而切换工作状态的情形。图中所示的虚线表示从车辆1发送的向车外电波的到达范围,图上与虚线相比的左侧是电波的到达范围外,与虚线相比的右侧是电波的到达范围内。
如图所示,本实施例的便携设备100(与以往的便携设备同样地)在处于电波的到达范围外的期间也根据有无振动来切换能够发送和接收电波的可通信状态和无法进行电波的发送和接收中的至少一者的禁止通信状态(参照图4的S100~S106)。
其结果是,例如如图7A所例示那样,使用者携带便携设备100移动的期间,便携设备100成为可通信状态,但是,如图7B所例示那样,使用者停步而便携设备100不再检测到振动时,便携设备100切换至禁止通信状态。像这样,在电波的到达范围外,便携设备100成为可通信状态和禁止通信状态中的某一种工作状态。
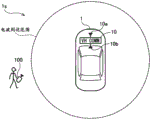
而且,如图6所示,使用者携带便携设备100进行移动时成为可通信状态,在进入电波的到达范围内时,接收来自车辆1的向车外电波,由此便携设备100的工作状态切换至延长可通信状态(参照图4的S108~图5的S110)。在此,延长可通信状态是不论是否检测到振动,在延长时间的期间内便携设备100均保持为能够收发电波的状态。另外,延长时间被设定为比较长的时间(例如,30分钟)。
因此,例如如图8所例示那样,便携设备100的使用者站在车辆1的车门前开始聊天,从而便携设备100检测不到振动,即使如此,(至少在延长时间的期间内)便携设备100也保持为可通信状态。其结果是,能够避免在车辆1侧检测不到便携设备100的存在而无法对使用者提供各种服务、结束站着聊天的使用者欲打开车门但却无法立即解锁、或者从车辆1侧反复发送用于探索便携设备100的电波而消耗电力的情况。
另外,即使便携设备100切换为延长可通信状态,当携带便携设备100的使用者在延长时间的期间内未乘入车辆1的情况下,便携设备100也会从延长可通信状态恢复到可通信状态,但是,只要能够接收到来自车辆1的向车外电波,就会再次恢复到延长可通信状态。
与之相对,在成为可通信状态起至经过缓冲时间为止的期间内,未检测到振动且也未接收到来自车辆1的向车外电波的情况下,便携设备100成为禁止通信状态。但是,例如使用者结束站着聊天而行动时,便携设备100检测到振动而再次成为可通信状态,接收来自车辆1的向车外电波,由此便携设备100再次恢复到延长可通信状态。
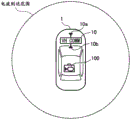
之后,使用者携带便携设备100乘入车辆1时,如图6所示,便携设备100接收到向车内电波而成为可继续通信状态。并且,该可继续通信状态一直持续到使用者将便携设备100带出车辆1外而便携设备100接收到向车外电波(参照图5的S112至S114)。例如如图9所示,使用者将便携设备100放入包中乘入车辆1后,将包放到座位之上,因此,即使便携设备100未检测到振动的状态持续,便携设备100也保持能够收发电波的状态。因此,在车辆1的车载通信设备10从内部天线10b发送向车内电波后,从便携设备100回复电波,所以在便携设备100处于车室内的期间,车载通信设备10能够识别该情况。
假设如图9所示在便携设备100被带入车室内之后因检测不到振动而成为禁止通信状态,则可能产生如下情况:例如在使用者要启动发动机时因便携设备100不被识别而发动机无法启动。或者,可能产生如下情况:尽管便携设备100存在于车室内,该便携设备100不被识别而自动上锁将便携设备100关于车室内,或者在将便携设备100遗留在车室内的状态下通过其他便携设备100将车辆1车门上锁。
但是,在本实施例的便携设备100中,便携设备100处于车室内的期间成为可继续通信状态,保持能够收发电波的状态,因此车载通信设备10能够识别便携设备100的存在。其结果是,能够避免伴随车载通信设备10无法再识别车室内的便携设备100而产生的上述情况。
另一方面,在便携设备100被带出车室外而接收到向车外电波时,从可继续通信状态经由延长可通信状态而切换为可通信状态。并且,在该可通信状态下不再检测到振动时,切换为禁止通信状态。因此,在本实施例的便携设备100中,还能够避免尽管便携设备100未被使用也无谓地收发电波而消耗电池、或者对通过中继器从较远车辆1中继来的电波进行回复而通过该电波致使车辆1车门被非正常地解锁的情况。
在本实施例中,在便携设备未检测到振动的期间,成为接收电波的功能和发送电波的功能中的至少一者停止的禁止通信状态,但是当检测到振动时,成为接收电波的功能和发送电波的功能均工作的可通信状态。而且,在可通信状态下接收到来自无线通信设备的电波时,即使检测不到振动,也使可通信状态持续。由此,在便携设备被带入车室内之前,接收来自无线通信设备的电波而使可通信状态持续。因此,在便携设备被带入车室内后,即便检测不到振动,也保持为能够在与车载通信设备之间收发电波的状态,从而车载通信设备能够识别车室内的便携设备。
此外,在上述实施例中,说明了如下情况:便携设备100接收向车外电波而切换的延长可通信状态一直保持到经过规定的延长时间为止,与之相对,便携设备100接收向车内电波而切换的可继续通信状态一直保持到接收到向车外电波为止(无时间的经过)。
此外,在上述实施例中,说明了如下情况:延长可通信状态的切换条件是经过规定的延长时间和接收到向车内电波中的任一者,与之相对,可继续通信状态的切换条件为接收到向车外电波,即使经过规定的时间也不切换可继续通信状态。
但是,对于可继续通信状态,也可以在经过规定的继续时间之后切换。在这样的情况下,如果将继续时间设定为充分长的时间(例如12个小时或24个小时等),则大多情况下并不是因经过了继续时间而切换可继续通信状态,而是根据接收到向车外电波而切换可继续通信状态。另一方面,在因某些理由而便携设备100长时间放置于车室内的情况下,也能够避免因便携设备100保持能够收发的状态而导致电池消耗的情况。
本公开所记载的流程图、或者流程图的处理由多个部(或者称为步骤)构成,各部例如表现为S100。并且,各部能够分割为多个子部,另一方面,多个部也能够集合成为一个部。并且,如上述那样构成的各部能够表现为电路、设备、模块、机构。
另外,上述多个部各自或者其组合不仅能够作为与(i)硬件单元(例如,计算机)组合的软件的部,也能够作为(ii)软件(例如,集成电路、布线逻辑电路)的部而包含或不包含相关装置的功能得以实现。并且,软件的部能够构成于微型计算机的内部。
基于实施例对本公开进行了叙述,但是,应理解本公开不限于该实施例和构成。本公开也包含各种变形例和等同范围内的变形。并且,各种组合和方式、以及在上述组合和方式中仅包含一个要素、其以上、或其以下得到的其他组合和方式,也落入本公开的范畴和思想范围内。
Claims (4)
1.一种便携设备,其通过与搭载于车辆(1)的无线通信设备(10)进行通信,能够对该无线通信设备发送认证信号,所述便携设备的特征在于,包括:
接收部(101),其接收来自所述无线通信设备的电波;
发送部(102),其在接收到的所述电波是请求发送所述认证信号的电波的情况下,发送所述认证信号;
振动检测部(103),其检测有无振动;以及
工作控制部(104),其在检测到所述振动的情况下设为使所述接收部和所述发送部均工作的可通信状态,在未检测到所述振动的情况下设为使所述接收部和所述发送部中的至少一者停止工作的禁止通信状态,
所述接收部在能够识别向车外电波和向车内电波的状态下接收来自所述无线通信设备的电波,其中,所述向车外电波是所述无线通信设备向所述车辆的外部发送的电波,所述向车内电波是所述无线通信设备向车室内发送的电波,
所述工作控制部在所述可通信状态下在规定的缓冲时间内未检测到所述振动的情况下,从所述可通信状态转变为所述禁止通信状态,
所述工作控制部在所述可通信状态下接收到所述向车外电波时,即使未检测到所述振动,也在规定的延长时间的期间内保持所述可通信状态,其中所述延长时间比所述缓冲时间长,
所述工作控制部在所述可通信状态下接收到所述向车内电波时,即使未检测到所述振动也设为使所述接收部和所述发送部均工作的可继续通信状态。
2.如权利要求1所述的便携设备,其特征在于:
所述工作控制部在所述可继续通信状态下在规定的继续时间内未检测到所述振动的情况下,从所述可继续通信状态转变为所述可通信状态,其中,所述继续时间比所述延长时间长。
3.如权利要求1或2所述的便携设备,其特征在于:
所述工作控制部在所述可继续通信状态下接收到所述向车外电波的情况下,从所述可继续通信状态转变为所述可通信状态。
4.一种便携设备的控制方法,所述便携设备通过与搭载于车辆(1)的无线通信设备(10)进行通信,能够对该无线通信设备发送认证信号,所述无线通信设备能够向所述车辆的外部发送向车外电波,并能够向车室内发送向车内电波,所述便携设备的控制方法的特征在于,包括:
检测所述便携设备有无振动的步骤(S100);
在未检测到所述振动的情况下,设为禁止通信状态的步骤(S105),其中,在所述禁止通信状态下,使在识别了所述向车外电波和所述向车内电波的状态下接收来自所述无线通信设备的电波的功能、和对所述无线通信设备发送所述认证信号的功能中的至少一者停止;
在检测到所述振动的情况下,设为可通信状态的步骤(S107),其中,在所述可通信状态下,使在识别了所述向车外电波和所述向车内电波的状态下接收来自所述无线通信设备的电波的功能、和对所述无线通信设备发送所述认证信号的功能均工作;
在所述可通信状态下在规定的缓冲时间内未检测到所述振动的情况下,从所述可通信状态转变为所述禁止通信状态的步骤(S104);
在所述可通信状态下接收到所述向车外电波时,即使未检测到所述振动,也在规定的延长时间的期间内保持所述可通信状态的步骤(S111),其中所述延长时间比所述缓冲时间长;和
在所述可通信状态下接收到所述向车内电波时,即使未检测到所述振动也使所述可通信状态继续的步骤(S113)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017130729A JP6724873B2 (ja) | 2017-07-03 | 2017-07-03 | 携帯機、携帯機の制御方法 |
| JP2017-130729 | 2017-07-03 | ||
| PCT/JP2018/012618 WO2019008843A1 (ja) | 2017-07-03 | 2018-03-28 | 携帯機、携帯機の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110710117A CN110710117A (zh) | 2020-01-17 |
| CN110710117B true CN110710117B (zh) | 2021-04-30 |
Family
ID=64950781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880036316.2A Active CN110710117B (zh) | 2017-07-03 | 2018-03-28 | 便携设备、便携设备的控制方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10701523B2 (zh) |
| JP (1) | JP6724873B2 (zh) |
| CN (1) | CN110710117B (zh) |
| DE (1) | DE112018003421B4 (zh) |
| WO (1) | WO2019008843A1 (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114829195A (zh) * | 2019-12-26 | 2022-07-29 | 索尼集团公司 | 车辆 |
| EP4254378A4 (en) * | 2020-11-30 | 2024-07-31 | Pioneer Corp | COMMUNICATION CONTROL TERMINAL, COMMUNICATION CONTROL METHOD, AND COMMUNICATION CONTROL PROGRAM |
| KR102515959B1 (ko) * | 2021-03-08 | 2023-03-29 | 가부시키가이샤 덴소 | 스마트키 진동 감지시스템 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005273283A (ja) * | 2004-03-24 | 2005-10-06 | Yupiteru Ind Co Ltd | ドアロック制御システム |
| JP2011052505A (ja) * | 2009-09-04 | 2011-03-17 | Tokai Rika Co Ltd | 電子キーシステム及び電子キー |
| CN103634367A (zh) * | 2012-08-22 | 2014-03-12 | 欧姆龙汽车电子株式会社 | 向车辆供给燃料时的控制系统、便携机 |
| CN103679863A (zh) * | 2012-09-25 | 2014-03-26 | 比亚迪股份有限公司 | 一种无钥匙车门控制系统及其控制方法 |
| JP2016089563A (ja) * | 2014-11-10 | 2016-05-23 | 株式会社ジーデバイス | 電子キー、及び電子回路 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10205186A (ja) * | 1997-01-21 | 1998-08-04 | Omron Corp | 送信機 |
| EP1366963B1 (en) * | 2000-07-05 | 2006-04-19 | Denso Corporation | Anti-theft system for vehicles having remote-controlled engine starting function |
| FR2822994B1 (fr) * | 2001-03-30 | 2004-05-21 | Bouygues Telecom Sa | Assistance au conducteur d'un vehicule automobile |
| JP2006319846A (ja) * | 2005-05-16 | 2006-11-24 | Sanyo Electric Co Ltd | 無線通信システム及び無線通信装置 |
| US8880133B2 (en) * | 2006-12-01 | 2014-11-04 | Intelligent Mechatronic Systems Inc. | Vehicle communication device |
| JP5350719B2 (ja) * | 2008-09-02 | 2013-11-27 | 株式会社デンソー | 車両のドアロック装置 |
| DE102009042862B4 (de) * | 2008-09-25 | 2021-01-28 | Denso Corporation | Intelligentes Zutrittssystem |
| EP2510740B1 (en) * | 2009-12-11 | 2019-09-11 | Stationnement Urbain Developpements et Etudes | Providing city services using mobile devices and a sensor network |
| JP2012227586A (ja) * | 2011-04-15 | 2012-11-15 | Nippon Soken Inc | 携帯型無線通信装置 |
| JP5862454B2 (ja) * | 2012-05-25 | 2016-02-16 | 株式会社日本自動車部品総合研究所 | スマートシステム |
| US20150116079A1 (en) * | 2013-10-24 | 2015-04-30 | GM Global Technology Operations LLC | Enhanced vehicle key fob |
| US9037125B1 (en) * | 2014-04-07 | 2015-05-19 | Google Inc. | Detecting driving with a wearable computing device |
| JP6483353B2 (ja) * | 2014-05-29 | 2019-03-13 | 三井金属アクト株式会社 | 車両用ドア開閉装置 |
| JP6520283B2 (ja) * | 2015-03-25 | 2019-05-29 | 株式会社デンソー | ユーザ識別システム、車両用携帯機 |
| JP2018028182A (ja) * | 2016-08-15 | 2018-02-22 | 株式会社東海理化電機製作所 | 携帯機及び電子キーシステム |
| KR101842436B1 (ko) * | 2016-09-07 | 2018-03-28 | 현대자동차주식회사 | 차량 및 차량의 제어방법 |
| DE112017007056T5 (de) * | 2017-02-14 | 2019-10-24 | Denso Corporation | Vorrichtung und System |
| US10415528B2 (en) * | 2017-06-30 | 2019-09-17 | GM Global Technology Operations LLC | Vehicle PEPS system calibration using a mobile device |
| KR101959305B1 (ko) * | 2017-09-15 | 2019-03-18 | 엘지전자 주식회사 | 차량 |
| US20190106021A1 (en) * | 2017-10-05 | 2019-04-11 | GM Global Technology Operations LLC | Dynamically configurable passenger section for passenger transport |
-
2017
- 2017-07-03 JP JP2017130729A patent/JP6724873B2/ja active Active
-
2018
- 2018-03-28 CN CN201880036316.2A patent/CN110710117B/zh active Active
- 2018-03-28 DE DE112018003421.6T patent/DE112018003421B4/de active Active
- 2018-03-28 WO PCT/JP2018/012618 patent/WO2019008843A1/ja active Application Filing
-
2019
- 2019-11-13 US US16/682,006 patent/US10701523B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005273283A (ja) * | 2004-03-24 | 2005-10-06 | Yupiteru Ind Co Ltd | ドアロック制御システム |
| JP2011052505A (ja) * | 2009-09-04 | 2011-03-17 | Tokai Rika Co Ltd | 電子キーシステム及び電子キー |
| CN103634367A (zh) * | 2012-08-22 | 2014-03-12 | 欧姆龙汽车电子株式会社 | 向车辆供给燃料时的控制系统、便携机 |
| CN103679863A (zh) * | 2012-09-25 | 2014-03-26 | 比亚迪股份有限公司 | 一种无钥匙车门控制系统及其控制方法 |
| JP2016089563A (ja) * | 2014-11-10 | 2016-05-23 | 株式会社ジーデバイス | 電子キー、及び電子回路 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019008843A1 (ja) | 2019-01-10 |
| CN110710117A (zh) | 2020-01-17 |
| US20200084584A1 (en) | 2020-03-12 |
| JP6724873B2 (ja) | 2020-07-15 |
| DE112018003421B4 (de) | 2024-06-06 |
| US10701523B2 (en) | 2020-06-30 |
| JP2019016840A (ja) | 2019-01-31 |
| DE112018003421T5 (de) | 2020-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10984616B2 (en) | Car sharing system and car sharing program | |
| US10493953B2 (en) | Car sharing system | |
| JP3909226B2 (ja) | 盗難防止機能を備えたパッシブエントリー | |
| JP6003938B2 (ja) | 電子キーシステム | |
| JP6292719B2 (ja) | 車両無線通信システム、車両制御装置、携帯機 | |
| WO2015107609A1 (ja) | 制御システム | |
| US9786110B2 (en) | On-vehicle apparatus control system and on-vehicle control device | |
| JP5600532B2 (ja) | 電子キーシステム | |
| CN108973933B (zh) | 控制系统、车载设备及电子钥匙 | |
| CN110710117B (zh) | 便携设备、便携设备的控制方法 | |
| JP2010121297A (ja) | スマートキーレスエントリシステム | |
| CN109552248B (zh) | 终端、车辆控制系统及车辆控制方法 | |
| JP2017115439A (ja) | 車載装置及び認証システム | |
| JP2017203314A (ja) | 無線通信システム | |
| JP2018071213A (ja) | 携帯機器、および携帯機器の制御方法 | |
| EP3640880B1 (en) | Vehicular control system | |
| JP5152011B2 (ja) | 電子キーシステム及び車両制御用携帯機 | |
| WO2020080076A1 (ja) | 車載制御装置、車載制御方法及びコンピュータプログラム | |
| JP7017049B2 (ja) | 車載機制御装置、車載機制御方法 | |
| US20190283710A1 (en) | Mobile device detection apparatus and mobile device detection method | |
| WO2015104748A1 (ja) | オートロックシステム | |
| WO2018221475A1 (ja) | 携帯機 | |
| JP6507042B2 (ja) | 通信不正成立防止システム | |
| US11059456B2 (en) | In-vehicle authentication device and portable device authentication method | |
| JP2006125098A (ja) | ドア施解錠制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |