CN109100861B - 致动器控制装置、光学模块、电子设备及致动器控制方法 - Google Patents
致动器控制装置、光学模块、电子设备及致动器控制方法 Download PDFInfo
- Publication number
- CN109100861B CN109100861B CN201811078551.4A CN201811078551A CN109100861B CN 109100861 B CN109100861 B CN 109100861B CN 201811078551 A CN201811078551 A CN 201811078551A CN 109100861 B CN109100861 B CN 109100861B
- Authority
- CN
- China
- Prior art keywords
- actuator
- gain
- unit
- interference filter
- gap size
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims abstract description 47
- 238000000034 method Methods 0.000 title claims abstract description 32
- 238000001514 detection method Methods 0.000 claims abstract description 91
- 238000012545 processing Methods 0.000 claims description 30
- 230000008569 process Effects 0.000 claims description 6
- 238000004611 spectroscopical analysis Methods 0.000 abstract description 8
- 239000000758 substrate Substances 0.000 description 53
- 239000007789 gas Substances 0.000 description 33
- 238000005259 measurement Methods 0.000 description 32
- 238000010586 diagram Methods 0.000 description 24
- 238000000605 extraction Methods 0.000 description 23
- 230000035945 sensitivity Effects 0.000 description 17
- 230000008859 change Effects 0.000 description 15
- 238000003384 imaging method Methods 0.000 description 15
- 230000003595 spectral effect Effects 0.000 description 14
- 239000000306 component Substances 0.000 description 12
- 238000007689 inspection Methods 0.000 description 12
- 230000002093 peripheral effect Effects 0.000 description 9
- 238000001069 Raman spectroscopy Methods 0.000 description 8
- 230000002159 abnormal effect Effects 0.000 description 6
- 230000010355 oscillation Effects 0.000 description 6
- 238000001228 spectrum Methods 0.000 description 6
- 239000000126 substance Substances 0.000 description 6
- 238000004458 analytical method Methods 0.000 description 5
- 230000007613 environmental effect Effects 0.000 description 5
- 238000004186 food analysis Methods 0.000 description 5
- 230000032683 aging Effects 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 239000010410 layer Substances 0.000 description 4
- BJQHLKABXJIVAM-UHFFFAOYSA-N bis(2-ethylhexyl) phthalate Chemical compound CCCCC(CC)COC(=O)C1=CC=CC=C1C(=O)OCC(CC)CCCC BJQHLKABXJIVAM-UHFFFAOYSA-N 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 229910052500 inorganic mineral Inorganic materials 0.000 description 3
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 239000011707 mineral Substances 0.000 description 3
- 229910001316 Ag alloy Inorganic materials 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 239000005428 food component Substances 0.000 description 2
- 235000012041 food component Nutrition 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 239000002086 nanomaterial Substances 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 1
- 238000004497 NIR spectroscopy Methods 0.000 description 1
- 238000002835 absorbance Methods 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000001124 body fluid Anatomy 0.000 description 1
- 239000010839 body fluid Substances 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 150000001720 carbohydrates Chemical class 0.000 description 1
- 229910052681 coesite Inorganic materials 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 229910052906 cristobalite Inorganic materials 0.000 description 1
- 238000013075 data extraction Methods 0.000 description 1
- KPUWHANPEXNPJT-UHFFFAOYSA-N disiloxane Chemical class [SiH3]O[SiH3] KPUWHANPEXNPJT-UHFFFAOYSA-N 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000011261 inert gas Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000011810 insulating material Substances 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 210000001525 retina Anatomy 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 229910052682 stishovite Inorganic materials 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- 238000002198 surface plasmon resonance spectroscopy Methods 0.000 description 1
- 239000013076 target substance Substances 0.000 description 1
- 229910052905 tridymite Inorganic materials 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Chemical compound O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/001—Optical devices or arrangements for the control of light using movable or deformable optical elements based on interference in an adjustable optical cavity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/12—Generating the spectrum; Monochromators
- G01J3/26—Generating the spectrum; Monochromators using multiple reflection, e.g. Fabry-Perot interferometer, variable interference filters
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/02—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the intensity of light
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B6/00—Internal feedback arrangements for obtaining particular characteristics, e.g. proportional, integral or differential
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B6/00—Internal feedback arrangements for obtaining particular characteristics, e.g. proportional, integral or differential
- G05B6/02—Internal feedback arrangements for obtaining particular characteristics, e.g. proportional, integral or differential electric
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N1/00—Electrostatic generators or motors using a solid moving electrostatic charge carrier
- H02N1/002—Electrostatic motors
- H02N1/006—Electrostatic motors of the gap-closing type
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Spectrometry And Color Measurement (AREA)
Abstract
本发明涉及致动器控制装置、光学模块、电子设备及致动器控制方法。分光测定装置具备:静电致动器(56),通过被施加驱动电压而驱动;间隙检测器(151),检测间隙(G1)的尺寸;闭环系统(15L),根据来自间隙检测器(151)的检测信号,控制向静电致动器(56)施加的驱动电压;以及增益设定单元(164),根据基于间隙检测器(151)的检测信号的静电致动器(56)的驱动特性,设定闭环系统(15L)中的增益。
Description
本申请是申请日为2015年1月26日、申请号为201510038264.0、发明名称为“致动器控制装置、光学模块、电子设备及致动器控制方法”的专利申请的分案申请,其全部内容结合于此作为参考。
技术领域
本发明涉及致动器控制装置、光学模块、电子设备及致动器控制方法。
背景技术
现有技术中,已知有具备相互对置的一对基板、分别配置在各基板而相互对置的反射膜以及分别配置在各基板而相互对置的电极的波长可变干涉滤波器(例如,参照专利文献1)。
在专利文献1所记载的波长可变干涉滤波器中,在各基板分别配置有相互对置的静电电容监视器用电极以及相互对置的静电力施加用电极(静电致动器)。在这样的波长可变干涉滤波器中,通过控制电路向静电致动器施加电压,从而使反射膜间的间隙量(间隔尺寸)发生变化。另外,通过用静电电容检测电路检测静电电容监视器用电极的电位,并基于检测到的静电电容微调(反馈控制)从控制电路向静电致动器施加的电压,从而能够将反射膜间间隙的间隙量设定为期望的目标值。
[现有技术文献]
[专利文献]
[专利文献1]日本特开平1-94312号公报
发明内容
发明要解决的技术问题
然而,在上述专利文献1所记载的静电致动器中,因温度变化等环境因素或随时间的变化等,存在施加规定的驱动电压时的驱动量发生变化(驱动特性变化)的情况。例如,在静电致动器的初始间隙变动的情况下,施加电压时的驱动量也会变化,从而导致驱动特性也发生变化。这样,驱动特性发生变化时,在静电致动器的驱动电路中,也需要进行用于重新设定最佳增益的增益控制。
然而,在上述专利文献1所记载的现有的使用固定增益的反馈电路中,不能实施最佳的增益控制,例如,存在到将静电致动器设定为目标值的时间延长、发生异常振荡等难以实施最佳反馈控制的课题。
本发明的目的在于,提供即使发生了驱动特性变化也能进行最佳的反馈控制的致动器控制装置、光学模块、电子设备、及致动器控制方法。
用于解决技术问题的方案
本发明的致动器控制装置的特征在于,具备:致动器,通过被施加驱动电压而驱动;检测单元,检测所述致动器的驱动量;反馈控制部,根据由所述检测单元检测到的所述驱动量,控制向所述致动器施加的驱动电压;以及增益设定单元,根据基于由所述检测单元检测的所述驱动量的所述致动器的驱动特性,设定所述反馈控制部中的增益。
在本发明中,基于由检测单元检测的致动器的驱动量判定该致动器的驱动特性,根据驱动特性设定反馈环路的增益。也就是说,即使在因环境变化、经年变化而致动器的驱动特性发生了变化的情况下,也可基于判定的驱动特性,重新设定反馈环路的增益。因此,能以与变化后的驱动特性对应的最佳增益驱动致动器。由此,能够抑制因不适当的增益而导致的异常振荡、到将致动器的驱动量设定为目标驱动量的时间延长等不良现象,能够实施最佳的致动器的反馈控制。
在本发明的致动器控制装置中,优选还具备:第一部件以及与所述第一部件相对的第二部件,所述致动器是具备设于所述第一部件的第一电极以及设于所述第二部件并与所述第一电极相对的第二电极的静电致动器,所述检测单元检测所述第一部件与所述第二部件间的间隙尺寸作为所述驱动量。
在本发明中,致动器是具备彼此相对的第一电极及第二电极的静电致动器,通过向电极间施加驱动电压而改变第一部件与第二部件的间隙尺寸。由于相对驱动电压的第一部件与第二部件的间隙尺寸非线性地变化,因此,因上述那样的环境变化、经年变化而驱动特性发生变化时,这样的静电致动器以固定增益的话,不能进行最佳的反馈控制。相对于此,本发明中,与上述发明同样,即使在致动器的驱动特性发生了变化的情况下,也能通过设定最佳增益来实施最佳的反馈控制,能够将第一部件与第二部件的间隙尺寸迅速设定为期望的尺寸。
在本发明的致动器控制装置中,优选所述增益设定单元基于未对所述致动器施加驱动电压的初始状态下的所述驱动量设定所述增益。
此外,如上所述,在设致动器为静电致动器并检测第一部件与第二部件的间隙尺寸作为驱动量的情况下,可将第一部件与第二部件的初始间隙尺寸作为初始驱动量。
致动器的驱动特性(表示相对于驱动电压的驱动量的曲线)为大致相同的形状,如果能够测定初始状态下的驱动量,则能预测驱动特性。因此,在本发明中,通过如上所述用检测单元检测初始状态下的驱动量,从而能容易地判定致动器的驱动特性,并根据该驱动特性容易地设定反馈环路中的增益。
在本发明的致动器控制装置中,优选所述增益设定单元取得多组对所述致动器施加的驱动电压、及施加该驱动电压时由所述检测单元检测到的所述驱动量的组合,并基于这些组合设定所述增益。
在本发明中,取得多个向致动器施加的驱动电压和施加该驱动电压时的驱动量的组合(测定点)。在这种情况下,即使致动器的驱动特性基于多个因素而发生了变化时,也能精度良好地求出致动器的驱动特性。因此,通过基于这样的驱动特性重新设定增益,从而能够针对致动器的驱动特性的变化设定更合适的增益。
在本发明的致动器控制装置中,优选所述反馈控制部具有控制器,所述控制器基于由所述检测单元检测到的所述驱动量和所述致动器的驱动量的目标值控制对所述致动器施加的驱动电压,所述增益设定单元设定所述控制器的增益。
在本发明中,在反馈环路中,设定对致动器施加反馈电压的控制器的增益。这样,通过根据驱动特性改变控制器的增益,从而能够适当进行反馈控制时的灵敏度的调整,能良好地维持控制状态。
在本发明的致动器控制装置中,优选:所述致动器具有能彼此独立地驱动的第一致动器和第二致动器,所述反馈控制部具备:偏置电压施加单元,对所述第一致动器施加规定的偏置电压;以及控制器,基于由所述检测单元检测到的所述驱动量以及所述致动器的驱动量的目标值控制对所述第二致动器施加的驱动电压,所述增益设定单元设定所述偏置电压施加单元中的偏置电压。
在本发明中,致动器由第一致动器及第二致动器构成,向第一致动器施加偏置电压,向第二致动器施加反馈电压。在这样的致动器中,通过施加偏置电压,使第一致动器粗动驱动,通过基于由检测单元检测到的驱动量的反馈电压,使第二致动器微动驱动,从而能精度良好地控制致动器的驱动量。
此时,如果改变控制微动驱动的第二致动器的反馈电压施加单元中的增益,例如使灵敏度变高,则反馈控制会变得困难。相对于此,在本发明中,重新设定偏置电压施加单元中的偏置电压。这样,通过重新设定偏置电压,从而第二致动器的灵敏度发生变化,结果能将反馈环路整体的增益设定为最佳值。另外,在本发明中,还能使反馈电压施加单元中的灵敏度保持为一定,可实施最佳的反馈控制。
本发明的光学模块的特征在于,具备:彼此相对的一对反射膜;致动器,通过被施加驱动电压而改变所述一对反射膜间的间隙尺寸;检测单元,检测所述一对反射膜间的间隙尺寸;反馈控制部,根据由所述检测单元检测到的所述间隙尺寸,控制向所述致动器施加的驱动电压;以及增益设定单元,根据基于由所述检测单元检测的所述间隙尺寸的所述致动器的驱动特性,设定所述反馈控制部中的增益。
本发明具备彼此相对的一对反射膜,可通过致动器改变反射膜间的间隙尺寸。即,本发明的光学模块通过致动器驱动,对波长可变型法布里-珀罗标准具进行反馈控制。
在这样的光学模块中,用检测单元检测反射膜间的间隙尺寸,基于其检测结果对致动器进行反馈控制,从而能精度良好地从法布里-珀罗标准具射出期望波长的光。
此时,与上述发明同样,即使在致动器的驱动特性发生了变动的情况下,也能将反馈环路的增益设定为最佳值,因此,通过反馈控制,能迅速地使反射膜间的间隙尺寸与期望值一致,能从波长可变型法布里-珀罗标准具射出期望波长的光。
本发明的电子设备的特征在于,具备:致动器,通过被施加驱动电压而驱动;检测单元,检测所述致动器的驱动量;反馈控制部,根据由所述检测单元检测到的所述驱动量,控制向所述致动器施加的驱动电压;增益设定单元,根据基于由所述检测单元检测的所述驱动量的所述致动器的驱动特性,设定所述反馈控制部中的增益;以及处理部,通过所述致动器的驱动,实施规定的处理。
在本发明中,如上所述,能实施最佳的致动器的反馈控制,能抑制异常振荡并迅速地驱动致动器到期望的目标驱动量。因此,能迅速地开始电子设备的处理部中的处理,能提高处理精度。
本发明的致动器控制方法的特征在于,是致动器控制装置的致动器控制方法,所述致动器控制装置具备:致动器,通过被施加驱动电压而驱动;检测单元,检测所述致动器的驱动量;以及反馈控制部,根据由所述检测单元检测到的所述驱动量,控制向所述致动器施加的驱动电压,在所述致动器控制方法中,基于由所述检测单元检测的所述驱动量,取得所述致动器的驱动特性,基于取得的所述驱动特性,设定所述反馈控制部中的增益,并以设定的所述增益向所述致动器施加所述驱动电压。
在本发明中,与上述发明同样,即使因环境变化、经年变化而致动器的驱动特性发生了变化时,也能以与变化了的驱动特性对应的最佳增益驱动致动器。由此,能抑制因不适当的增益所导致的异常振荡、到将致动器的驱动量设定为目标值的时间延长等不良现象,能实施最佳的致动器的反馈控制。
附图说明
图1是示出本发明的第一实施方式的分光测定装置的概略构成的框图。
图2是示出第一实施方式的光学模块的概略构成的图。
图3是第一实施方式的波长可变干涉滤波器的俯视图。
图4是第一实施方式的电压控制部中的闭环系统的概念图。
图5是示出静电致动器的驱动特性数据的一个例子的图。
图6是示出第一实施方式的波长可变干涉滤波器的驱动方法(致动器控制方法)的流程图。
图7是用于说明第二实施方式的驱动特性数据的取得方法的图。
图8是示出第三实施方式的光学模块的概略构成的图。
图9是第三实施方式的波长可变干涉滤波器的俯视图。
图10是第三实施方式的电压控制部中的闭环系统的概念图。
图11是示出第三实施方式中的波长可变干涉滤波器的驱动方法(致动器控制方法)的流程图。
图12是示出作为本发明的电子设备的一个例子的测色装置的概略图。
图13是示出作为本发明的电子设备的一个例子的气体检测装置的概略图。
图14是示出图13的气体检测装置的控制系统的构成的框图。
图15是示出作为本发明的电子设备的一个例子的食物分析装置的概略构成的图。
图16是示出作为本发明的电子设备的一个例子的分光摄像机的概略构成的图。
具体实施方式
[第一实施方式]
以下,基于附图说明本发明所涉及的第一实施方式的分光测定装置。
[分光测定装置的构成]
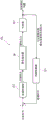
图1是示出本发明所涉及的第一实施方式的分光测定装置的概略构成的框图。
分光测定装置1是本发明的电子设备,是分析由测定对象X所反射的测定对象光中的规定波长的光强度来测定分光光谱的装置。此外,在本实施方式中示出测定由测定对象X所反射的测定对象光的例子,但例如在采用液晶显示器等发光体作为测定对象X的情况下,也可将从该发光体发出的光作为测定对象光。
如图1所示,该分光测定装置1具备光学模块10、检测器11(检测部)、I-V转换器12、放大器13、A/D转换器14和控制部20。另外,光学模块10构成为具备波长可变干涉滤波器5和电压控制部15。
检测器11接收透过光学模块10的波长可变干涉滤波器5的光,并输出与接收的光的光强度相应的检测信号(电流)。
I-V转换器12将输入自检测器11的检测信号转换为电压值,并输出到放大器13。
放大器13放大与输入自I-V转换器12的检测信号相应的电压(检测电压)。
A/D转换器14将从放大器13输入的检测电压(模拟信号)转换为数字信号,并输出到控制部20。
电压控制部15基于控制部20的控制来驱动波长可变干涉滤波器5,使规定的目标波长的光从波长可变干涉滤波器5透过。
[光学模块的构成]
接着,下面来说明光学模块10的构成。
图2是示出光学模块10的概略构成的框图。
如上所述,光学模块10构成为具备波长可变干涉滤波器5和电压控制部15。
[波长可变干涉滤波器的构成]
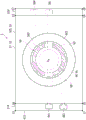
以下说明光学模块10的波长可变干涉滤波器5。图3是示出波长可变干涉滤波器5的概略构成的俯视图。
如图2及图3所示,波长可变干涉滤波器5例如是矩形板状的光学部件,具备固定基板51(第一部件)及可动基板52(第二部件)。这些固定基板51及可动基板52例如由各种玻璃、水晶等绝缘性材料形成,通过由例如将硅氧烷作为主要成分的等离子体聚合膜等构成的接合膜53(参照图2)来接合固定基板51和可动基板52,从而一体地构成固定基板51及可动基板52。
在固定基板51设有构成本发明的一对反射膜中一方的固定反射膜54,在可动基板52设有构成本发明的一对反射膜中另一方的可动反射膜55。这些固定反射膜54及可动反射膜55隔着间隙G1(参照图2)而相对配置。
另外,在固定基板51设有固定电极561,在可动基板52设有可动电极562。这些固定电极561及可动电极562隔着规定的间隙而相对配置。这些固定电极561及可动电极562构成作为本发明的致动器的一个例子的静电致动器56。
此外,在以后的说明中,将从固定基板51或可动基板52的基板厚度方向观察的俯视观察、即从固定基板51、接合膜53及可动基板52的层叠方向观察波长可变干涉滤波器5的俯视观察为滤波器俯视观察。另外,在本实施方式中,在滤波器俯视观察中,固定反射膜54的中心点及可动反射膜55的中心点一致,称俯视观察下的这些反射膜的中心点为滤波器中心点O,称通过这些反射膜的中心点的直线为中心轴。
(固定基板的构成)
如图2所示,固定基板51具备例如通过蚀刻等形成的电极配置槽511及反射膜设置部512。另外,固定基板51的一端侧(图3中的边C1-C2)比可动基板52的基板端缘(图3中的边C5-C6)更向外侧突出,构成第一端子取出部514。
在滤波器俯视观察下,电极配置槽511形成为以固定基板51的滤波器中心点O为中心的环状。在滤波器俯视观察中,反射膜设置部512形成为从电极配置槽511的中心部向可动基板52侧突出。在该电极配置槽511的槽底面设有静电致动器56的固定电极561。另外,在反射膜设置部512的突出前端面设有固定反射膜54。
另外,在固定基板51设有从电极配置槽511向固定基板51的外周边缘延伸的电极引出槽(未图示)。
固定电极561例如形成为圆弧状(近似C字状),如图3所示,在靠近边C1-C2的一部分设置C字开口部。另外,也可以采用在固定电极561上层叠用于确保与可动电极562之间的绝缘性的绝缘膜的构成。
而且,固定电极561具备沿电极引出槽延伸到第一端子取出部514的固定引出电极563。该固定引出电极563的延伸前端部例如通过FPC(Flexible printed circuits:柔性电路板)、引线等与电压控制部15连接。
设置在反射膜设置部512的突出前端面的固定反射膜54例如由Ag等金属膜、Ag合金等具有导电性的反射膜材料构成。此外,例如也可以使用以TiO2作为高折射层、以SiO2作为低折射层的电介质多层膜作为固定反射膜54。在使用电介质多层膜作为固定反射膜54的情况下,通过在该电介质多层膜的最下层或最上层(表层)层叠导电性膜而使其带有导电性。作为该导电性膜,可以使用对广的波长范围具有高反射率特性的例如Ag合金等的反射膜。在该情况下,可通过导电性膜来拓宽波长可变干涉滤波器5的测定对象波长范围,可对广的波长范围取出期望的目标波长,且可利用电介质多层膜以高分辨率取出目标波长的光。另外,也可以在导电性膜与反射膜设置部512之间、导电性膜与电介质多层膜之间进一步插入用于提高贴紧性的透明粘接层。
而且,如图3所示,在固定基板51设有与固定反射膜54的外周边缘连接并通过固定电极561的C字开口部而向第一端子取出部514延伸的第一镜电极(ミラー電極)541。该第一镜电极541通过在形成固定反射膜54时同时地成膜而成。
而且,第一镜电极541在第一端子取出部514上与电压控制部15连接。
固定基板51中的、未形成电极配置槽511、反射膜设置部512及电极引出槽的区域通过接合膜53与可动基板52接合。
(可动基板的构成)
在图3所示的滤波器俯视观察中,可动基板52具备:以滤波器中心点O为中心的圆形状的可动部521、与可动部521同轴并保持可动部521的保持部522、以及设于保持部522的外侧的基板外周部525。
另外,如图3所示,可动基板52的一端侧(图3中的边C7-C8)比固定基板51的基板端缘(图3中的边C3-C4)更向外侧突出,构成第二端子取出部524。
可动部521形成为比保持部522厚度尺寸大,例如,在本实施方式中,形成为与可动基板52的厚度尺寸为同一尺寸。在滤波器俯视观察中,该可动部521形成为至少比反射膜设置部512的外周边缘的直径尺寸大的直径尺寸。而且,在该可动部521的与固定基板51相对的可动面设有可动反射膜55及可动电极562。
在滤波器俯视观察中,可动电极562设于可动反射膜55的外周侧,与固定电极561隔着间隙而相对配置。该可动电极562形成为圆弧状(近似C字状),如图3所示,在靠近边C7-C8的一部分设置C字开口部。另外,也可以与固定电极561同样地采用在可动电极562上层叠绝缘膜的构成。
这里,如图3所示,在滤波器俯视观察中,通过可动电极562与固定电极561重叠的圆弧区域(在图3中,用右上斜线部表示的区域)构成静电致动器56。如图3所示,在滤波器俯视观察中,该静电致动器56是相对滤波器中心点O互相呈点对称的形状及配置。因此,对静电致动器56施加电压时所产生的静电引力也作用于相对滤波器中心点O呈点对称的位置,可保持平衡地使可动部521向固定基板51侧位移。
另外,如图3所示,可动电极562设有向第二端子取出部524延伸的可动引出电极564。该可动引出电极564沿着与设于固定基板51的电极引出槽相对的位置而配置。另外,可动引出电极564的延伸前端部例如通过FPC、引线等而与电压控制部15连接。
可动反射膜55设置成在可动部521的可动面的中心部与固定反射膜54隔着反射膜间间隙G1而相对。作为该可动反射膜55,使用与上述的固定反射膜54相同的构成的反射膜。此外,在本实施方式中,反射膜54、55间的间隙G1比电极561、562间的间隙小。
另外,如图3所示,在可动基板52设有与可动反射膜55的外周边缘连接并通过可动电极562的C字开口部而向第二端子取出部524延伸的第二镜电极551。
另外,在通过电介质多层膜和导电性膜的层叠体构成可动反射膜55的情况下,第二镜电极551与导电性膜同时形成,并与该导电性膜连接。
而且,该第二镜电极551在第二端子取出部524上例如通过FPC、引线等与电压控制部15连接。
此外,如图3所示,在本实施方式中示出了电极561、562间的间隙G2比间隙G1大的例子,但并不限定于此。例如,在以红外光为对象作为测定对象光的情况下等,根据测定对象波长范围,可以采用间隙G1比电极561、562间的间隙G2大的构成。
保持部522是包围可动部521的周围的隔膜,形成为比可动部521的厚度尺寸小。这样的保持部522比可动部521更容易挠曲,因稍许的静电引力就可能使可动部521向固定基板51侧位移。此时,由于可动部521比保持部522的厚度尺寸大,刚性更大,故即使在保持部522因静电引力而被拽向固定基板51侧时,也可抑制可动部521的形状变化。因此,也难以产生设于可动部521的可动反射膜55的挠曲,可使固定反射膜54及可动反射膜55总是维持在平行状态。
此外,在本实施方式中例示了隔膜状的保持部522,但并不限定于此,例如,可采用以滤波器中心点O为中心、设置等角度间隔配置的梁状的保持部的构成等。
如上所述,基板外周部525在滤波器俯视观察中设于保持部522的外侧。基板外周部525的与固定基板51相对的面经由接合膜53与固定基板51接合。
[电压控制部的构成]
如图2所示,电压控制部15构成为具备:间隙检测器151(本发明中的检测单元)、反馈控制部152、以及微型计算机(微控制器)16。
图4是使用电压控制部15的反馈环路的概念图。
如图4所示,电压控制部15通过波长可变干涉滤波器5的静电致动器56、间隙检测器151、反馈控制部152构成闭环系统(クローズドループシステム)15L(反馈环路)。而且,在本实施方式中,微型计算机16基于静电致动器56的驱动特性设定该闭环系统15L的增益,从而合适地维持反馈控制时的控制状态。
以下,详细说明电压控制部15的构成。
间隙检测器151与波长可变干涉滤波器5的第一镜电极541及第二镜电极551连接。该间隙检测器151检测因静电致动器56的驱动而变动的、反射膜54、55间的间隙G1的尺寸,并输出检测信号。这里,通过检测间隙G1的间隙尺寸,也能够容易地算出静电致动器56的驱动量,间隙检测器151作为本发明的检测单元起作用。
具体而言,间隙检测器151具有未图示的C-V转换电路,将反射膜54、55间的静电电容转换为电压值(检测信号)。作为这样的C-V转换电路,例如可列举开关电容电路(スイッチト·キャパシタ回路)等。
然后,间隙检测器151输出检测信号到反馈控制部152及微型计算机16。
此外,间隙检测器151既可以输出模拟信号作为检测信号,也可以输出数字信号作为检测信号。在输出数字信号的情况下,将来自C-V转换电路的检测信号(模拟信号)输入到ADC(Analog to Digital Converter:模数转换器),转换成数字值。
反馈控制部152相当于本发明的控制器,与波长可变干涉滤波器5的固定引出电极563及可动引出电极564连接。而且,反馈控制部152基于从微型计算机输入的旨在将间隙G1设定为规定的目标值的指令信号,对静电致动器56施加驱动电压。
另外,反馈控制部152对施加于静电致动器56的驱动电压进行增减控制,使来自间隙检测器151的检测信号与从微型计算机16输入的指令信号的偏差为规定阈值以下。即,反馈控制部152基于检测信号及指令信号实施反馈控制。
另外,反馈控制部152可利用微型计算机16的控制改变增益。通过改变反馈控制部152的增益来调整闭环系统整体的增益。
具体而言,在使用模拟方式的控制器作为反馈控制部152的情况下,在控制器中设置可设定多个增益中的任一个的增益设定电路。而且,根据来自微型计算机16的控制信号将增益设定电路的增益设定为规定的增益。
另外,在使用数字方式的控制器作为反馈控制部152的情况下,基于微型计算机的信号改写控制增益的参数(寄存器值),从而可以设定为规定的增益。
微型计算机16具备存储器161,例如存储有由间隙检测器151检测的检测信号(电压信号)与间隙G1的尺寸的关系(间隙相关数据)。此外,作为间隙相关数据,也可以记录相对于检测信号的间隙G2的尺寸。
另外,在存储器161中记录有表示相对于向静电致动器56施加的驱动电压的间隙G2(致动器间隙)的尺寸的静电致动器56的驱动特性数据。另外,相对于各驱动特性数据,关联地存储有最佳增益。
图5是示出驱动特性数据的一个例子的图。
在本实施方式中,如图5所示,记录有未对静电致动器56施加驱动电压的初始状态下的间隙G2的尺寸(初始间隙尺寸)各不相同的多个驱动特性数据。
另外,如图2所示,微型计算机16作为目标指令单元162、特性取得单元163、及增益设定单元164而发挥作用。
当波长设定指令从控制部20输入时,目标指令单元162算出与目标波长对应的间隙G1的尺寸(目标值),并作为目标信号向反馈控制部152输出。
特性取得单元163基于从间隙检测器151输入的检测信号,取得静电致动器56的驱动特性。
增益设定单元164基于特性取得单元163所取得的驱动特性,设定反馈控制部152的增益。
[控制部的构成]
返回图1,说明分光测定装置1的控制部20。
控制部20相当于本发明的处理部,例如通过组合CPU、存储器等来构成,控制分光测定装置1的整体动作。如图1所示,该控制部20具备波长设定部21、光量取得部22、分光测定部23和存储部30。
在存储部30中记录有用于控制分光测定装置1的各种程序、各种数据(例如表示相对于目标波长的驱动电压的V-λ数据等)。
波长设定部21设定由波长可变干涉滤波器5取出的光的目标波长,并向电压控制部15输出意为从波长可变干涉滤波器5取出所设定的目标波长的控制信号。
光量取得部22基于由检测器11取得的光量,取得透过波长可变干涉滤波器5的目标波长的光的光量。
分光测定部23基于由光量取得部22取得的光量,测定测定对象光的光谱特性。
[波长可变干涉滤波器的驱动方法]
图6是示出分光测定装置1的分光测定处理中的波长可变干涉滤波器的驱动方法(致动器控制方法)的流程图。
为了通过分光测定装置1取得包含在测定对象光中的各波长的光的强度,首先,控制部20通过波长设定部21设定透过波长可变干涉滤波器5的光的波长(目标波长)。而且,波长设定部21向电压控制部15输出意为使所设定的目标波长的光透过的波长设定指令(步骤S1)。
接着,微型计算机16的特性取得单元163基于初始状态下的从间隙检测器151输入的检测信号,取得静电致动器56的驱动特性数据(步骤S2)。
具体而言,特性取得单元163基于从间隙检测器151输入的检测信号,取得反射膜54、55间的间隙G1的初始间隙尺寸,并根据间隙G1的初始间隙,算出电极561、562间的间隙G2的初始值(初始间隙尺寸)。于是,特性取得单元163根据存储于存储器中的多个驱动特性数据,取得与算出的间隙G2的初始间隙尺寸对应的驱动特性数据。
接着,增益设定单元164针对取得的驱动特性数据,取得最佳的增益(步骤S3)。
在本实施方式中,读入与各驱动特性数据相关联的最佳增益。
此外,虽然示出了增益与驱动特性数据相关联的例子,但例如,也可以在存储器161中预先存储示出了增益相对于间隙G2的初始间隙尺寸的关系的表数据。
另外,在设定有相对于作为基准的驱动特性数据(基准特性数据)的基准增益的情况下,增益设定单元164也可以基于在步骤S2中取得的驱动特性数据和基准特性数据,进行算出增益等的处理。
例如,在图5中,以曲线A的驱动特性数据作为基准数据,相对于其设定有其基准增益Gc,当在步骤S2中取得了曲线B的驱动特性数据的情况下,增益设定单元164算出各驱动特性数据的灵敏度比。
例如,在曲线A的基准数据中,将致动器间隙G2设定为Gα时,反馈控制中的灵敏度是Rα(m/V),驱动特性变化为曲线B,将间隙G2设定为Gα时的反馈控制中的灵敏度变化为Rβ(m/V)。此时,增益设定单元164设定基准增益Gc的(Rβ/Rα)倍的增益。由此,抑制了反馈控制时的灵敏度变化,能够抑制异常振荡、到目标值的设定时间增加等不良现象。
然后,增益设定单元164将旨在设定在步骤S3中取得的增益的控制信号输出到反馈控制部152并设定增益(步骤S4)。
然后,目标指令单元162基于在步骤S1中输入的波长设定指令中包含的目标波长,将表示静电致动器56的间隙G2的目标值的目标信号输出到反馈控制部152。由此,反馈控制部152实施反馈控制(步骤S5)。
即,反馈控制部152控制向静电致动器56施加的驱动电压,使从间隙检测器151输入的检测信号与目标信号的偏差接近于0。
通过该步骤S5,波长可变干涉滤波器5的间隙G1的尺寸成为与在步骤S1中设定的目标波长对应的尺寸,从波长可变干涉滤波器5射出以目标波长为中心的光。由此,在检测器11接收目标波长的光,控制部20的光量取得部22基于从检测器11输入的光量检测信号,取得目标波长的光的光量(步骤S6)。
[第一实施方式的作用效果]
在本实施方式中,特性取得单元163基于来自间隙检测器151的检测信号,测定静电致动器56的驱动特性,增益设定单元164设定与测得的驱动特性对应的反馈控制中的增益。
因此,即使静电致动器56的驱动特性例如因环境变化、经年老化等而发生变动,也能设定与变动后的驱动特性对应的最佳增益。由此,在反馈控制时,能避免静电致动器56异常振荡、输出目标波长的光需要多余的时间的不良现象,能够进行最佳的反馈控制。
通过实施这样的最佳反馈控制,从而在光学模块10中也能更迅速地取得目标波长的光的光量,也能更迅速地实施分光测定装置1中的分光测定处理。
在本实施方式中,特性取得单元163取得未对静电致动器56施加驱动电压的初始状态下的间隙G2的初始间隙尺寸,读出与该初始间隙尺寸对应的驱动特性数据。
在波长可变干涉滤波器5的保持部522等的弹簧系数视为一定的情况等下,能够根据间隙G2的初始间隙尺寸预测行为特性(行動特性)。另外,通过如本实施方式那样,在存储器161中预先存储多个驱动特性数据,从而能够更迅速地取得相对于初始间隙尺寸的驱动特性数据。由此,能更迅速地进行增益设定,也能更迅速地开始反馈控制。
[第二实施方式]
接着,基于附图说明本发明的第二实施方式。
在上述第一实施方式中,在步骤S2中,特性取得单元163根据间隙G2的初始间隙尺寸取得静电致动器56的驱动特性。相对于此,第二实施方式基于多个测定点取得静电致动器56的驱动特性,在这点上与上述第一实施方式不同。
此外,在以后的说明时,对已经说明过的构成标注相同的符号,并省略或简化其说明。
图7是用于说明第二实施方式的驱动特性数据的取得方法的图。
在本实施方式中,特性取得单元163在上述步骤S2中,通过改变驱动电压来取得多个相对于向静电致动器56施加的驱动电压的、基于施加该驱动电压时的来自间隙检测器的检测信号的间隙G2的尺寸(测定点c)。
然后,特性取得单元163基于这些取得的多个测定点c,例如通过多项式近似等取得驱动特性的曲线数据C。
在本实施方式中,得到基于多个测定点c的驱动特性数据。在这种情况下,例如,能够测定基于波长可变干涉滤波器5的保持部522的弹簧系数等更多参数的驱动特性的变化。通过得到与这样的多的参数的变化对应的驱动特性数据,能更精度良好地设定静电致动器56的反馈控制时的控制增益,能够实施稳定的反馈控制。
[第三实施方式]
接着,基于附图说明本发明的第三实施方式。
在上述第一及第二实施方式中,例示了用一个静电致动器56将反射膜54、55间的间隙G1控制为期望的值的光学模块10。
对此,在第三实施方式中,静电致动器具备可分别独立地驱动的第一致动器及第二致动器,通过这些第一及第二致动器来控制间隙G1的尺寸,在这点上与上述第一及第二实施方式不同。
图8是示出第三实施方式的光学模块的概略构成的图。图9是波长可变干涉滤波器的俯视图。
[波长可变干涉滤波器的构成]
本实施方式的波长可变干涉滤波器5A相对于上述第一及第二实施方式,电极构成不同。本实施方式的波长可变干涉滤波器5A在滤波器俯视观察中,在反射膜54、55的外侧设有双重电极结构的电极。
具体而言,如图8及图9所示,本实施方式的波长可变干涉滤波器5A的静电致动器由第一静电致动器56A及第二静电致动器56B构成。
第一静电致动器56A由设于固定基板51的第一固定电极561A、及设于可动基板52的第一可动电极562A构成。
第一固定引出电极563A与第一固定电极561A连接,第一可动引出电极564A与第一可动电极562A连接,这些引出电极563A、564A分别与电压控制部15A连接。
第二静电致动器56B设于第一静电致动器56A的外侧,由设于固定基板51的第二固定电极561B和设于可动基板52的第二可动电极562B构成。
第二固定引出电极563B与第二固定电极561B连接,第二可动引出电极564B与第二可动电极562B连接,这些引出电极563B、564B分别与电压控制部15A连接。
[电压控制部的构成]
图10是本实施方式的反馈环路(闭环系统)的概念图。
在本实施方式的电压控制部15A的闭环系统15L中,对第一实施方式的电压控制部15还设置有偏压驱动部153(本发明的偏置电压施加单元)。
第一静电致动器56A的各引出电极563A、564A与该偏压驱动部153连接。
另外,第二静电致动器56B的各引出电极563B、564B与反馈控制部152A连接。
偏压驱动部153对第一静电致动器56A施加偏置电压。具体而言,偏压驱动部153基于从微型计算机16A输入的偏压信号,向第一静电致动器56A施加电压。
反馈控制部152对第二静电致动器56B施加反馈电压。此时,反馈控制部152对第二静电致动器56B施加反馈电压,使从间隙检测器151输入的检测信号与从微型计算机16A输入的目标信号为相同值。
此外,在本实施方式中,反馈控制部152的增益为固定增益,保持为一定。
微型计算机16A具有存储器161,与第一实施方式同样,记录有间隙相关数据、驱动特性数据、与各驱动特性数据对应的设定增益等。
另外,微型计算机16A作为目标指令单元162、特性取得单元163、以及偏压指令单元165而发挥作用。
偏压指令单元165基于从控制部20输入的波长设定指令,向偏压驱动部153输出指示施加偏置电压的偏压指令。
[波长可变干涉滤波器的驱动方法]
图11是示出波长可变干涉滤波器的驱动方法(致动器控制方法)的流程图。
为了用分光测定装置1取得测定对象光中包含的各波长的光的强度,首先,与第一实施方式同样,通过步骤S1的处理,从控制部20向电压控制部15输出波长设定指令。并且,当微型计算机16A收到波长设定指令时,算出与目标波长对应的间隙G1的目标值(目标信号)。
然后,与步骤S2同样,特性取得单元163取得初始状态下的从间隙检测器151输入的检测信号,取得反射膜54、55间的间隙G1的初始间隙尺寸。此外,也可与第二实施方式同样,取得多个测定点c,求出驱动特性。在这种情况下,取得从偏压驱动部153施加偏置电压时的间隙G2的尺寸,并作为测定点c。
接着,偏压指令单元165取得与所取得的驱动特性数据对应的最佳偏置电压(步骤S11)。
具体而言,偏压指令单元165算出与间隙G1的目标值对应的偏置电压。
即,在本实施方式中,在反馈控制中,以对第二静电致动器56B施加电压时的灵敏度(感度)(相对于施加电压的间隙位移量(m/V))为一定的方式来设定偏置电压。
这里,对第二静电致动器56B施加电压时的灵敏度RC(m/V)用下式(1)表示。
[数学式1]

在式(1)中,Vb是向第一静电致动器56A施加的偏置电压,k是可动基板52(保持部522)的弹簧系数,ε是固定基板51及可动基板52间(电极间间隙G2)的介电常数,Sb是第一静电致动器56A的有效面积(第一固定电极561A及第一可动电极562A在滤波器俯视观察中重合的区域的面积),SC是第二静电致动器56B的有效面积,dmax是电极间间隙G2的初始间隙量,d是为使目标波长的光透过的可动部521的目标位移量(电极间间隙G2的间隙位移量)。
在本实施方式中,在反馈控制时,以对第二静电致动器56B施加电压时的灵敏度为一定的方式施加偏置电压Vb。即,在上述式(1)中,VC是固定值,使用与构成反馈控制部152A的控制器中的固定增益相应的预设的值。另外,如果从控制部20输入指定目标波长的波长设定指令,则微型计算机16A能算出从波长可变干涉滤波器5A取出目标波长的光所需的间隙G1的目标值,从该目标值能算出应使可动部521位移的量(目标位移量d)。
在上述式(1)中对Vb求解,可导出下式(2)。
[数学式2]

偏压指令单元165基于上述式(2),算出对第二静电致动器56B施加电压时的灵敏度为一定的偏置电压,并将意为向第一静电致动器56A施加该偏置电压的偏压指令输出到偏压驱动部153。由此,从偏压驱动部153向第一静电致动器56A施加偏置电压(步骤S12)。
即,在本实施方式中,通过固定反馈控制部152的增益,并利用偏压指令单元165设定与静电致动器56的驱动特性对应的最佳偏置电压,从而调整第二静电致动器56B的电压施加时的灵敏度,使整个闭环系统15L中的增益最佳化。因此,在本实施方式中,偏压指令单元165作为本发明中的增益设定单元而发挥作用。
然后,实施步骤S5的反馈控制、及步骤S6的光量获取。
在本实施方式中,静电致动器56由被偏压驱动部153施加偏置电压的第一静电致动器56A、及被反馈控制部152A施加反馈电压的第二静电致动器56B构成。而且,偏压指令单元165基于由特性取得单元163获取的静电致动器56的驱动特性,重新设定偏压驱动部153中的偏置电压。
因此,在本实施方式中,与上述实施方式同样,即使在致动器的驱动特性发生了变动的情况下,也能根据变动的特性将偏压驱动部的偏置电压设定为最佳值,并能控制整个闭环系统15L中的增益,使第二静电致动器56B的反馈控制时的灵敏度为一定。由此,可实施最佳的反馈控制。
[其它实施方式]
此外,本发明并不限于上述的实施方式,能够达到本发明目的的范围内的变形、改良等均被包含在本发明之中。
例如,在本发明中,作为致动器,例示了改变波长可变干涉滤波器5、5A中的间隙G1的尺寸的静电致动器,但不限定于此。例如,还可以以使用压电致动器、感应线圈致动器等其它致动器作为致动器的反馈环路为对象。特别是,在驱动量相对于驱动电压非线性地变动的致动器的情况下,由于驱动特性的变动,在反馈控制时未设定最佳的增益时,如上所述,有可能出现异常振荡等妨碍正常驱动的情况。本发明对这样的驱动特性非线性地变动的致动器是有效的,通过设定最佳增益,能够实施维持了最合适的控制状态的反馈控制。
在上述实施方式中,将反射膜54、55用作电容检测用的电极,但不限定于此。例如,可与反射膜54、55分开地在固定基板51及可动基板52上设置彼此相对的电容检测用电极。
另外,也可使用反射膜54、55作为驱动用电极。例如,在第三实施方式中,也可以使反射膜54、55作为第二静电致动器或第一静电致动器而发挥功能。
另外,作为驱动量的检测单元,并不限于使用上述的静电电容检测电极的构成,例如,也可以采用通过应变仪等检测可动基板52(保持部522)的弯曲状态来检测反射膜间间隙G1的间隙量的构成,也可以采用在外部设置用于检测间隙量的光传感器的构成等。
另外,在上述各实施方式中,基于式(2)设定向偏压驱动部153施加的偏置电压,但并不限定于此。例如,也可采用将相对于反射膜54、55间的间隙G1的目标值的偏置电压存储为表数据而存储在存储单元中的构成。在这种情况下,微型计算机16不实施基于式(2)的偏置电压的算出,从表数据读出相对于目标间隙量的偏置电压即可。
另外,作为偏置电压,使用比通过单独驱动偏压驱动部153而使反射膜间间隙G1设定为目标间隙量的驱动电压小的电压即可。通过施加这样的偏置电压,在反馈控制部152对第二静电致动器56B的控制中,与不施加偏置电压的情况相比,能够降低灵敏度,能提高反馈控制的精度。
在上述第三实施方式中,示出了被施加偏置电压的第一静电致动器56A配置在被施加反馈电压的第二静电致动器56B的外周侧的例子,但不限定于此。例如,也可以采用第一静电致动器56A设于反射膜54、55的外周侧且第二静电致动器56B的内周侧、而第二静电致动器56B设于第一静电致动器56A的外周侧的构成等。
另外,作为本发明的电子设备,在上述各实施方式中例示了分光测定装置1,此外,可在各种领域应用本发明的波长可变干涉滤波器的驱动方法、光学模块、及电子设备。
例如,如图12所示,也可将本发明的电子设备用作测定颜色的测色装置。
图12是示出具备波长可变干涉滤波器的测色装置400的一个例子的框图。
如图12所示,该测色装置400具备:向检查对象A射出光的光源装置410、测色传感器420(光学模块)、以及控制测色装置400的整体动作的控制装置430(处理部)。而且,该测色装置400是使检查对象A反射从光源装置410射出的光,由测色传感器420接收所反射的检查对象光,并基于从测色传感器420输出的检测信号,对测定对象光的色度、即检查对象A的颜色进行分析、测定的装置。
光源装置410具备光源411和多个透镜412(在图12中仅记载1个),对检查对象A射出例如基准光(例如白色光)。另外,在多个透镜412中也可以包含准直透镜,在该情况下,光源装置410通过准直透镜将从光源411射出的基准光变为平行光,并从未图示的投射透镜向检查对象A射出。此外,在本实施方式中,例示了具备光源装置410的测色装置400,但是,例如在检查对象A是液晶面板等发光部件的情况下,也可以是不设置光源装置410的构成。
如图12所示,测色传感器420具备:波长可变干涉滤波器5;检测器11,其接收透过波长可变干涉滤波器5的光;以及电压控制部15,使在波长可变干涉滤波器5透过的光的波长可变。另外,测色传感器420在与波长可变干涉滤波器5相对的位置上具备将检查对象A所反射的反射光(检查对象光)向内部导光的未图示的入射光学透镜。并且,该测色传感器420通过波长可变干涉滤波器5将从入射光学透镜射入的检查对象光中的规定波长的光进行分光,并由检测器11接收分光后的光。此外,也可以代替波长可变干涉滤波器5而配置波长可变干涉滤波器5A。
控制装置430控制测色装置400的整体动作。
作为该控制装置430,例如可以使用通用的个人电脑、便携式信息终端、其它的测色专用电脑等。而且,如图12所示,控制装置430构成为具备光源控制部431、测色传感器控制部432、以及测色处理部433等。
光源控制部431连接于光源装置410,例如基于用户的设定输入,向光源装置410输出规定的控制信号,使其射出规定亮度的白色光。
测色传感器控制部432连接于测色传感器420,例如基于用户的设定输入,设定由测色传感器420接收的光的波长,并将旨在检测该波长的光的受光量的控制信号输出至测色传感器420。由此,测色传感器420的电压控制部15基于控制信号,将电压施加于静电致动器56,使波长可变干涉滤波器5驱动。
测色处理部433从由检测器11检测到的受光量,分析检查对象A的色度。
另外,作为本发明的电子设备的其它例子,可以列举检测特定物质的存在的基于光的系统。作为这样的系统,例如可以例示出:采用使用了本发明的波长可变干涉滤波器的分光计测方式来高敏度检测特定气体的车载用气体泄漏检测器、呼吸检查用的光声惰性气体检测器等气体检测装置。
下面,根据附图来说明这种气体检测装置的一例。
图13是示出具备波长可变干涉滤波器的气体检测装置的一例的概略图。
图14是示出图13所示的气体检测装置的控制系统的构成的框图。
如图13所示,该气体检测装置100构成为具备传感器芯片110、流路120、以及主体部130,该流路120具备:吸引口120A、吸引流路120B、排出流路120C、以及排出口120D。
主体部130由包括具有可以装卸流路120的开口的传感器部盖131、排出单元133、壳体134、光学部135、滤光器136、波长可变干涉滤波器5、以及受光元件137(检测部)等的检测装置(光学模块)、控制部138(处理部)、以及电力供给部139等构成,控制部138处理所检测到的信号并控制检测部,电力供给部139用于供给电力。此外,光学部135由射出光的光源135A、光束分离器135B、以及透镜135C、135D、135E构成,光束分离器135B向传感器芯片110侧反射从光源135A射入的光,并使从传感器芯片侧射入的光透过至受光元件137侧。
此外,如图14所示,在气体检测装置100的表面设置有操作面板140、显示部141、用于和外部的接口的连接部142、电力供给部139。在电力供给部139是二次电池的情况下,还可以具备用于充电的连接部143。
而且,如图14所示,气体检测装置100的控制部138具备:由CPU等构成的信号处理部144、用于控制光源135A的光源驱动器电路145、用于控制波长可变干涉滤波器5的电压控制部146、用于接收来自于受光元件137的信号的受光电路147、接收来自于传感器芯片检测器148的信号的传感器芯片检测电路149、以及控制排出单元133的排出驱动器电路150等,其中,传感器芯片检测器148读取传感器芯片110的代码,检测传感器芯片110的有无。
下面,将对上述的气体检测装置100的动作进行说明。
在主体部130的上部的传感器部盖131的内部设置有传感器芯片检测器148,通过该传感器芯片检测器148检测传感器芯片110的有无。信号处理部144在检测到来自于传感器芯片检测器148的检测信号时,判断为是安装有传感器芯片110的状态,并向显示部141输出使其显示可实施检测动作的旨意的显示信号。
并且,例如在用户操作操作面板140,从操作面板140向信号处理部144输出旨在开始检测处理的指示信号时,首先,信号处理部144向光源驱动器电路145输出光源动作的信号,使光源135A进行动作。在光源135A被驱动的情况下,从光源135A以单一波长射出直线偏振光的稳定的激光。此外,在光源135A中内置有温度传感器、光量传感器,其信息向信号处理部144输出。并且,信号处理部144在基于从光源135A输入的温度、光量判断为光源135A在稳定动作中的情况下,控制排出驱动器电路150,使排出单元133动作。由此,含有要检测的目标物质(气体分子)的气体样本从吸引口120A被引向吸引流路120B、传感器芯片110内、排出流路120C、排出口120D。此外,在吸引口120A设置有除尘过滤器120A1,用于去除比较大的粉尘、一部分的水蒸气等。
此外,传感器芯片110是组装有多个金属纳米结构体并利用了局域表面等离子体共振的传感器。在这样的传感器芯片110中,通过激光在金属纳米结构体之间形成增强电场,如果气体分子进入该增强电场内,则会产生含有分子振动的信息的拉曼散射光以及瑞利散射光。
这些瑞利散射光、拉曼散射光通过光学部135射入滤光器136,瑞利散射光被滤光器136分离,拉曼散射光射入到波长可变干涉滤波器5。于是,信号处理部144对电压控制部146输出控制信号。由此,电压控制部146如上述第一实施方式所示,由间隙检测器151、反馈控制部152、及微型计算机16构成,利用与上述第一实施方式同样的驱动方法,使波长可变干涉滤波器5驱动,通过波长可变干涉滤波器5,使与作为检测对象的气体分子对应的拉曼散射光分光。此外,也可以采用与第三实施方式的电压控制部15A同样的构成。
之后,若分光后的光被受光元件137接收,则对应受光量的受光信号经由受光电路147被输出至信号处理部144。此时,能够从波长可变干涉滤波器5高精度地取出作为目标的拉曼散射光。
信号处理部144将如上所述地获得的作为检测对象的气体分子所对应的拉曼散射光的光谱数据和ROM中存储的数据进行比较,判断是否是目标气体分子,并进行物质的指定。此外,信号处理部144使显示部141显示其结果信息、或从连接部142向外部输出。
需要说明的是,在上述图13以及图14中,例示了由波长可变干涉滤波器5分光拉曼散射光、且从分光后的拉曼散射光来进行气体检测的气体检测装置100,但是,作为气体检测装置,也可以用作通过检测气体固有的吸光度来指定气体类别的气体检测装置。在这种情况下,将本发明的光学模块用作使气体流入传感器内部来检测入射光中被气体吸收的光的气体传感器。并且,将本发明的电子设备作为通过这样的气体传感器来分析、判断流入传感器内的气体的气体检测装置。在这样的构成中,也可以使用波长可变干涉滤波器来检测气体的成分。
此外,作为用于检测特定物质的存在的系统,并不限于上述的气体的检测,还可以例示出利用近红外线分光的糖类的非侵入式测定装置、或食物、生物体、矿物等信息的非侵入式测定装置等物质成分分析装置。
下面,作为上述物质成分分析装置的一个例子,对食物分析装置进行说明。
图15是示出作为利用了波长可变干涉滤波器5的电子设备的一个例子的食物分析装置的概略构成的图。
如图15所示,该食物分析装置200具备检测器210(光学模块)、控制部220、和显示部230。检测器210具备射出光的光源211、被导入来自于测定对象物的光的摄像透镜212、对从摄像透镜212导入的光进行分光的波长可变干涉滤波器5、以及检测分光后的光的摄像部213(检测部)。
此外,控制部220具备:光源控制部221,实施光源211的亮灯/灭灯控制、亮灯时的亮度控制;电压控制部222,控制波长可变干涉滤波器5;检测控制部223,控制摄像部213,获取摄像部213所拍摄的分光图像;信号处理部224(分析部);以及存储部225。
在该食物分析装置200中,在使系统驱动时,由光源控制部221控制光源211,从光源211对测定对象物照射光。于是,被测定对象物所反射的光通过摄像透镜212射入到波长可变干涉滤波器5中。通过电压控制部222的控制,波长可变干涉滤波器5以上述第一实施方式所示的驱动方法而被驱动。由此,能够从波长可变干涉滤波器5高精度地取出目标波长的光。然后,被取出的光被例如由CCD摄像机等构成的摄像部213所拍摄。并且,被拍摄的光作为分光图像存储在存储部225中。此外,信号处理部224控制电压控制部222,使施加于波长可变干涉滤波器5的电压值发生变化,从而获取对应各波长的分光图像。
然后,信号处理部224对存储部225中存储的各图像中的各像素的数据进行运算处理,求得在各像素的光谱。此外,在存储部225中,存储有例如相对于光谱的食物的成分相关的信息,信号处理部224基于存储部225中存储的食物相关的信息对求得的光谱的数据进行分析,求出检测对象所包含的食物成分及其含量。此外,还可以从获得的食物成分及含量算出食物卡路里、新鲜度等。而且,通过分析图像内的光谱分布,还可以实施检查对象食物中新鲜度下降的部分的提取等,进而,还可以实施食物内所含的异物等的检测。
并且,信号处理部224进行使显示部230显示如上所述地获得的检查对象食物的成分、含量、卡路里、新鲜度等信息的处理。
此外,在图15中,示出了食物分析装置200的例子,但是,也可以基于大致相同的构成,用作如上所述的其它信息的非侵入式测定装置。例如,可以用作血液等体液成分的测定、分析等的进行生物体成分的分析的生物体分析装置。作为这样的生物体分析装置,例如,如果是将用于检测酒精的装置作为测定血液等体液成分的装置,则可以用作检测驾驶员的饮酒状态的防酒驾装置。此外,还可以用作具备这样的生物体分析装置的电子内窥镜系统。
进而,还可以用作实施矿物的成分分析的矿物分析装置。
而且,本发明的波长可变干涉滤波器、光学模块、电子设备可以应用于以下所述的装置。
例如,通过使各波长的光的强度随着时间的推移发生变化,还可以通过各波长的光来传送数据,在这种情况下,通过设于光学模块的波长可变干涉滤波器对特定波长的光进行分光,并由受光部来接收光,从而可以提取由特定波长的光所传送的数据,通过具备这样的数据提取用光学模块的电子设备来处理各波长的光的数据,从而还可以实施光通信。
此外,作为电子设备,还可以应用于通过本发明的波长可变干涉滤波器来对光进行分光、从而拍摄分光图像的分光摄像机、分光分析机等。作为这样的分光摄像机的一个例子,可以列举内置有波长可变干涉滤波器的红外线摄像机。
图16是示出分光摄像机的概略构成的示意图。如图16所示,分光摄像机300具备摄像机主体310、摄像透镜单元320、和摄像部330(检测部)。
摄像机主体310是由用户把持、操作的部分。
摄像透镜单元320设置于摄像机主体310,将射入的图像光引导至摄像部330。此外,如图16所示,该摄像透镜单元320构成为具备物镜321、成像透镜322、以及设置在这些透镜之间的波长可变干涉滤波器5。
摄像部330由受光元件构成,用于拍摄被摄像透镜单元320引导的图像光。
在这样的分光摄像机300中,通过波长可变干涉滤波器5使作为拍摄对象的波长的光透过,从而可以拍摄期望波长的光的分光图像。此时,对于各波长,电压控制部(省略图示)利用上述第一实施方式所示的本发明的驱动方法驱动波长可变干涉滤波器5,从而能够精度良好地取出目标波长的分光图像的图像光。
而且,还可以将本发明的波长可变干涉滤波器用作带通滤波器,例如,还可以用作通过波长可变干涉滤波器仅对发光元件射出的规定波长范围的光中以规定波长为中心的窄频带(狭帯域)的光进行分光并使其透过的光学式激光装置。
此外,还可以将本发明的波长可变干涉滤波器用作生物体认证装置,例如还可应用于利用近红外区域、可见区域的光的、血管、指纹、视网膜、虹膜等的认证装置。
而且,可以将光学模块以及电子设备用作浓度检测装置。在这种情况下,通过波长可变干涉滤波器对从物质射出的红外能量(红外光)进行分光、分析,从而来测定样品中的被检体浓度。
如上所述,本发明的波长可变干涉滤波器、光学模块以及电子设备还可以应用于从入射光对规定的光进行分光的任何装置。并且,如上所述,本发明的波长可变干涉滤波器能够以一个器件来对多个波长进行分光,因此,可以高精度地实施多个波长的光谱的测定、对多个成分的检测。因此,与通过多个器件来提取期望波长的现有装置相比,可以促进光学模块、电子设备的小型化,例如,可适合用作便携用、车载用的光学器件。
进而,在上述实施方式中,例示了从设于基板间的静电致动器56的间隙尺寸取得驱动特性并设定静电致动器56的反馈控制中的增益的例子,但不限定于此。
例如,可用于通过施加电压而驱动量相对于驱动电压非线性变化的致动器驱动装置的反馈控制,作为这样的致动器,例如,可例举压电致动器(ピエゾアクチュエーター)等。具体而言,还可应用于通过对压电致动器施加驱动电压来使镜片按与驱动电压相应的角度改变姿势的镜器件(ミラーデバイス)等。在这种情况下,可举出通过检测施加规定的驱动电压时的压电致动器的驱动量(驱动角度等)来取得压电致动器的驱动特性并基于取得的驱动特性对压电致动器的驱动进行反馈控制的构成等。
此外,实施本发明时的具体结构可在达到本发明目的的范围内适当变更为其它结构等。
Claims (8)
1.一种致动器控制装置,其特征在于,包括:
检测单元,检测波长可变干涉滤波器的第一反射膜与所述波长可变干涉滤波器的第二反射膜间的间隙尺寸;以及
反馈环路,根据检测到的所述间隙尺寸,控制向所述波长可变干涉滤波器的致动器施加的驱动电压,
根据基于检测到的所述间隙尺寸的所述致动器的驱动特性,设定所述反馈环路中的增益,
所述致动器控制装置还包括设定所述增益的增益设定单元,
所述增益设定单元取得所述驱动电压和施加该驱动电压时由所述检测单元检测到的所述间隙尺寸的多组组合,并基于这些组合设定所述增益。
2.根据权利要求1所述的致动器控制装置,其特征在于,
所述致动器控制装置具备第一部件以及与所述第一部件相对的第二部件,
所述致动器具备设于所述第一部件的第一电极以及设于所述第二部件并与所述第一电极相对的第二电极,
所述检测单元检测所述第一部件与所述第二部件间的间隙尺寸。
3.根据权利要求1所述的致动器控制装置,其特征在于,
所述反馈环路具有控制器,所述控制器基于由所述检测单元检测到的所述间隙尺寸和所述间隙尺寸的目标值控制所述驱动电压,
所述增益设定单元设定所述控制器的增益。
4.根据权利要求1所述的致动器控制装置,其特征在于,
所述反馈环路具备:偏置电压施加单元,对第一致动器施加规定的偏置电压;以及控制器,基于由所述检测单元检测到的所述间隙尺寸以及所述间隙尺寸的目标值控制对第二致动器施加的驱动电压,
所述增益设定单元设定所述偏置电压施加单元中的偏置电压。
5.一种光学模块,其特征在于,具备:
权利要求1至4中任一项所述的致动器控制装置。
6.一种电子设备,其特征在于,具备:
权利要求1至4中任一项所述的致动器控制装置;以及
处理部,实施规定的处理。
7.一种致动器控制方法,其特征在于,包括:
检测波长可变干涉滤波器的第一反射膜与所述波长可变干涉滤波器的第二反射膜间的间隙尺寸;
基于检测到的所述间隙尺寸,取得所述波长可变干涉滤波器的致动器的驱动特性;以及
基于所述驱动特性,设定根据检测到的所述间隙尺寸控制向所述致动器施加的驱动电压的反馈环路中的增益,
取得所述驱动电压和施加该驱动电压时检测到的所述间隙尺寸的多组组合,并基于这些组合设定所述增益。
8.一种致动器控制装置,其特征在于,包括:
检测单元,检测波长可变干涉滤波器的第一反射膜与所述波长可变干涉滤波器的第二反射膜间的间隙尺寸;以及
反馈控制部,根据检测到的所述间隙尺寸,控制向所述波长可变干涉滤波器的致动器施加的驱动电压,
根据基于检测到的所述间隙尺寸的所述致动器的驱动特性,设定所述反馈控制部中的增益,
所述致动器控制装置还包括设定所述增益的增益设定单元,
所述增益设定单元取得所述驱动电压和施加该驱动电压时由所述检测单元检测到的所述间隙尺寸的多组组合,并基于这些组合设定所述增益。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-012125 | 2014-01-27 | ||
| JP2014012125A JP6543884B2 (ja) | 2014-01-27 | 2014-01-27 | アクチュエーター制御装置、光学モジュール、電子機器、及びアクチュエーター制御方法 |
| CN201510038264.0A CN104808333A (zh) | 2014-01-27 | 2015-01-26 | 致动器控制装置、光学模块、电子设备及致动器控制方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510038264.0A Division CN104808333A (zh) | 2014-01-27 | 2015-01-26 | 致动器控制装置、光学模块、电子设备及致动器控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109100861A CN109100861A (zh) | 2018-12-28 |
| CN109100861B true CN109100861B (zh) | 2022-01-14 |
Family
ID=52469593
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811078551.4A Active CN109100861B (zh) | 2014-01-27 | 2015-01-26 | 致动器控制装置、光学模块、电子设备及致动器控制方法 |
| CN201510038264.0A Pending CN104808333A (zh) | 2014-01-27 | 2015-01-26 | 致动器控制装置、光学模块、电子设备及致动器控制方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510038264.0A Pending CN104808333A (zh) | 2014-01-27 | 2015-01-26 | 致动器控制装置、光学模块、电子设备及致动器控制方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9910262B2 (zh) |
| EP (1) | EP2899516A1 (zh) |
| JP (1) | JP6543884B2 (zh) |
| CN (2) | CN109100861B (zh) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013238755A (ja) | 2012-05-16 | 2013-11-28 | Seiko Epson Corp | 光学モジュール、電子機器、食物分析装置、分光カメラ、及び波長可変干渉フィルターの駆動方法 |
| JP6107186B2 (ja) | 2013-02-05 | 2017-04-05 | セイコーエプソン株式会社 | 光学モジュール、電子機器、及び分光カメラ |
| JP6543884B2 (ja) | 2014-01-27 | 2019-07-17 | セイコーエプソン株式会社 | アクチュエーター制御装置、光学モジュール、電子機器、及びアクチュエーター制御方法 |
| JP6413325B2 (ja) | 2014-05-01 | 2018-10-31 | セイコーエプソン株式会社 | アクチュエーター装置、電子機器、及び制御方法 |
| TWI581004B (zh) * | 2015-11-18 | 2017-05-01 | 財團法人工業技術研究院 | 可調式光學裝置 |
| JP6746376B2 (ja) * | 2016-05-23 | 2020-08-26 | 株式会社ミツトヨ | 測定システム及び調整用設定値の切替方法 |
| NO20161086A1 (no) * | 2016-06-29 | 2018-01-01 | Tunable As | Modulerbar Fabry-Perot |
| JP6720112B2 (ja) | 2017-05-23 | 2020-07-08 | 浜松ホトニクス株式会社 | フィルタ制御式導出方法、光計測システム、ファブリペロー干渉フィルタの制御方法、及び、フィルタ制御プログラム |
| US10955336B2 (en) * | 2017-08-26 | 2021-03-23 | Innovative Micro Technology | Gas sensor comprising a rotatable Fabry-Perot multilayer etalon |
| JP7043885B2 (ja) * | 2018-02-26 | 2022-03-30 | セイコーエプソン株式会社 | 分光装置、温度特性導出装置、分光システム、分光方法、及び温度特性導出方法 |
| JP2021087304A (ja) * | 2019-11-28 | 2021-06-03 | セイコーエプソン株式会社 | アクチュエーター駆動装置、及びアクチュエーター駆動装置の制御方法 |
Family Cites Families (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59170912A (ja) * | 1983-03-17 | 1984-09-27 | Hitachi Ltd | 流量制御装置 |
| JPS6088264A (ja) * | 1983-10-18 | 1985-05-18 | Nissan Motor Co Ltd | 無段変速機の制御装置 |
| JPH0194312A (ja) | 1987-10-06 | 1989-04-13 | Sharp Corp | 可変干渉装置 |
| JPH048186A (ja) * | 1990-04-26 | 1992-01-13 | Toshiba Corp | 電動機の速度制御装置 |
| US5142414A (en) | 1991-04-22 | 1992-08-25 | Koehler Dale R | Electrically actuatable temporal tristimulus-color device |
| JPH07243963A (ja) | 1994-03-07 | 1995-09-19 | Yazaki Corp | 光共振器とその製造方法 |
| US5751469A (en) | 1996-02-01 | 1998-05-12 | Lucent Technologies Inc. | Method and apparatus for an improved micromechanical modulator |
| JP3347654B2 (ja) * | 1997-10-29 | 2002-11-20 | キヤノン株式会社 | 駆動装置 |
| US6665109B2 (en) | 2000-03-20 | 2003-12-16 | Np Photonics, Inc. | Compliant mechanism and method of forming same |
| US6747775B2 (en) | 2000-03-20 | 2004-06-08 | Np Photonics, Inc. | Detunable Fabry-Perot interferometer and an add/drop multiplexer using the same |
| JP3835525B2 (ja) | 2001-03-19 | 2006-10-18 | ホーチキ株式会社 | 波長可変フィルタ制御装置 |
| JP3982349B2 (ja) | 2001-07-05 | 2007-09-26 | 株式会社デンソー | 波長可変デバイス |
| JP4019847B2 (ja) | 2001-08-17 | 2007-12-12 | 株式会社デンソー | 機能デバイス |
| US6781208B2 (en) | 2001-08-17 | 2004-08-24 | Nec Corporation | Functional device, method of manufacturing therefor and driver circuit |
| JP2003215473A (ja) | 2002-01-21 | 2003-07-30 | Yokogawa Electric Corp | ファブリペローフィルタ |
| AU2003277565A1 (en) | 2002-11-06 | 2004-06-07 | Matsushita Electric Industrial Co., Ltd. | Microactuator provided with diplacement detection function, and deformable mirror provided with this microactuator |
| TW200408824A (en) | 2002-11-21 | 2004-06-01 | Delta Electronics Inc | Method for finesse compensation in a Fabry-Perot device and a Fabry-Perot device with high finesse |
| JP2004258385A (ja) * | 2003-02-26 | 2004-09-16 | Olympus Corp | 光偏向装置 |
| US7126805B2 (en) * | 2003-04-10 | 2006-10-24 | Honda Motor Co., Ltd. | Solenoid driving device |
| JP4226374B2 (ja) * | 2003-04-10 | 2009-02-18 | 本田技研工業株式会社 | ソレノイド駆動装置 |
| US7265477B2 (en) | 2004-01-05 | 2007-09-04 | Chang-Feng Wan | Stepping actuator and method of manufacture therefore |
| JP3867716B2 (ja) * | 2004-06-18 | 2007-01-10 | セイコーエプソン株式会社 | 超音波トランスデューサ、超音波スピーカ、及び超音波トランスデューサの駆動制御方法 |
| US7110122B2 (en) | 2004-07-21 | 2006-09-19 | Hewlett-Packard Development Company, L.P. | Interferometer calibration methods and apparatus |
| JP4548288B2 (ja) | 2005-09-22 | 2010-09-22 | セイコーエプソン株式会社 | 波長可変フィルタ |
| JP4466634B2 (ja) | 2006-01-19 | 2010-05-26 | セイコーエプソン株式会社 | 光学デバイス、波長可変フィルタ、波長可変フィルタモジュール、および光スペクトラムアナライザ |
| US7583418B2 (en) * | 2006-09-26 | 2009-09-01 | Xerox Corporation | Array based sensor to measure single separation or mixed color (or IOI) patches on the photoreceptor using MEMS based hyperspectral imaging technology |
| JP2008151544A (ja) | 2006-12-14 | 2008-07-03 | Olympus Corp | 可変分光素子、分光装置および内視鏡システム |
| JP2008183350A (ja) | 2007-01-31 | 2008-08-14 | Olympus Corp | 可変分光素子、分光装置および内視鏡システム |
| JP2008197362A (ja) | 2007-02-13 | 2008-08-28 | Olympus Corp | 可変分光素子 |
| JP5230952B2 (ja) | 2007-02-13 | 2013-07-10 | オリンパス株式会社 | 内視鏡用可変分光素子、分光装置および内視鏡システム |
| JP2008211894A (ja) * | 2007-02-26 | 2008-09-11 | Olympus Imaging Corp | 駆動装置および撮像装置 |
| DE102009001381A1 (de) | 2009-03-06 | 2010-09-09 | Robert Bosch Gmbh | Antriebselement und Verfahren zum Betrieb eines Antriebselements |
| IL201742A0 (en) | 2009-10-25 | 2010-06-16 | Elbit Sys Electro Optics Elop | Tunable spectral filter |
| JP2011106936A (ja) | 2009-11-17 | 2011-06-02 | Seiko Epson Corp | 分光測定装置、および分析装置 |
| JP6010275B2 (ja) | 2010-03-15 | 2016-10-19 | セイコーエプソン株式会社 | 光フィルター並びにそれを用いた分析機器及び光機器 |
| JP5589459B2 (ja) | 2010-03-15 | 2014-09-17 | セイコーエプソン株式会社 | 光フィルター及び光フィルターモジュール並びに分析機器及び光機器 |
| JP5348032B2 (ja) | 2010-03-16 | 2013-11-20 | セイコーエプソン株式会社 | 光フィルター並びにそれを用いた分析機器及び光機器 |
| JP5834418B2 (ja) | 2011-02-04 | 2015-12-24 | セイコーエプソン株式会社 | 光フィルター、光フィルターモジュール、分析機器及び光機器 |
| JP5909850B2 (ja) | 2011-02-15 | 2016-04-27 | セイコーエプソン株式会社 | 波長可変干渉フィルター、光モジュール、及び光分析装置 |
| JP5807353B2 (ja) | 2011-03-18 | 2015-11-10 | セイコーエプソン株式会社 | 光フィルター及び光フィルターモジュール並びに分析機器及び光機器 |
| JP5874271B2 (ja) | 2011-09-27 | 2016-03-02 | セイコーエプソン株式会社 | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、及び電子機器 |
| JP5879910B2 (ja) * | 2011-10-18 | 2016-03-08 | セイコーエプソン株式会社 | 光フィルター、光フィルターモジュール、分析機器、及び光機器 |
| JP5966405B2 (ja) * | 2012-02-14 | 2016-08-10 | セイコーエプソン株式会社 | 光学フィルターデバイス、及び光学フィルターデバイスの製造方法 |
| JP5888080B2 (ja) | 2012-04-11 | 2016-03-16 | セイコーエプソン株式会社 | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、電子機器、及び波長可変干渉フィルターの駆動方法 |
| JP6015090B2 (ja) | 2012-04-18 | 2016-10-26 | セイコーエプソン株式会社 | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、及び電子機器 |
| JP2013238755A (ja) | 2012-05-16 | 2013-11-28 | Seiko Epson Corp | 光学モジュール、電子機器、食物分析装置、分光カメラ、及び波長可変干渉フィルターの駆動方法 |
| JP6019863B2 (ja) * | 2012-07-18 | 2016-11-02 | セイコーエプソン株式会社 | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、および電子機器、並びに波長可変干渉フィルターの製造方法 |
| JP2014059497A (ja) | 2012-09-19 | 2014-04-03 | Seiko Epson Corp | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、電子機器、及びmemsデバイス |
| JP6107186B2 (ja) | 2013-02-05 | 2017-04-05 | セイコーエプソン株式会社 | 光学モジュール、電子機器、及び分光カメラ |
| JP6543884B2 (ja) | 2014-01-27 | 2019-07-17 | セイコーエプソン株式会社 | アクチュエーター制御装置、光学モジュール、電子機器、及びアクチュエーター制御方法 |
-
2014
- 2014-01-27 JP JP2014012125A patent/JP6543884B2/ja active Active
-
2015
- 2015-01-23 US US14/603,902 patent/US9910262B2/en active Active
- 2015-01-23 EP EP15152295.0A patent/EP2899516A1/en not_active Withdrawn
- 2015-01-26 CN CN201811078551.4A patent/CN109100861B/zh active Active
- 2015-01-26 CN CN201510038264.0A patent/CN104808333A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN104808333A (zh) | 2015-07-29 |
| CN109100861A (zh) | 2018-12-28 |
| EP2899516A1 (en) | 2015-07-29 |
| US20150212313A1 (en) | 2015-07-30 |
| JP2015141210A (ja) | 2015-08-03 |
| JP6543884B2 (ja) | 2019-07-17 |
| US9910262B2 (en) | 2018-03-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109100861B (zh) | 致动器控制装置、光学模块、电子设备及致动器控制方法 | |
| CN105045292B (zh) | 致动器装置、电子设备、以及控制方法 | |
| JP6019863B2 (ja) | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、および電子機器、並びに波長可変干渉フィルターの製造方法 | |
| CN107479182B (zh) | 光模块、电子设备、食物分析装置以及分光照相机 | |
| JP6107186B2 (ja) | 光学モジュール、電子機器、及び分光カメラ | |
| JP6136356B2 (ja) | 測定装置 | |
| JP5987573B2 (ja) | 光学モジュール、電子機器、及び駆動方法 | |
| JP6390090B2 (ja) | 光学フィルターデバイス、光学モジュール、及び電子機器 | |
| US11347049B2 (en) | MEMS driving device, electronic apparatus, and MEMS driving method | |
| JP2015141209A (ja) | アクチュエーター制御装置、光学モジュール、及び電子機器 | |
| US20140078503A1 (en) | Spectroscope, wavelength variable interference filter, optical filter device, optical module, and electronic device | |
| JP5888080B2 (ja) | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、電子機器、及び波長可変干渉フィルターの駆動方法 | |
| JP6036341B2 (ja) | 光学モジュール、及び電子機器 | |
| JP6051534B2 (ja) | 容量検出回路、光学モジュール、及び電子機器 | |
| JP6194673B2 (ja) | 光学モジュール及び電子機器 | |
| US9429694B2 (en) | Wavelength tunable interference filter, optical filter device, optical module, and electronic apparatus | |
| JP6566061B2 (ja) | 波長可変干渉フィルターの駆動方法 | |
| JP2015225148A (ja) | 光学モジュール、電子機器、及び波長可変干渉フィルターの制御方法 | |
| JP6296128B2 (ja) | 光学モジュール、電子機器、食物分析装置、分光カメラ、及び波長可変干渉フィルターの駆動方法 | |
| JP2014182323A (ja) | 干渉フィルター、光学フィルターデバイス、光学モジュール、及び電子機器 | |
| JP2014174365A (ja) | 干渉フィルター、光学フィルターデバイス、光学モジュール、電子機器、干渉フィルターの製造方法、及び基板間接続構造 | |
| JP2014106269A (ja) | 波長可変干渉フィルター、光学フィルターデバイス、光学モジュール、及び電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |