CN1090324C - 加速度传感器及其制造方法 - Google Patents
加速度传感器及其制造方法 Download PDFInfo
- Publication number
- CN1090324C CN1090324C CN96122837A CN96122837A CN1090324C CN 1090324 C CN1090324 C CN 1090324C CN 96122837 A CN96122837 A CN 96122837A CN 96122837 A CN96122837 A CN 96122837A CN 1090324 C CN1090324 C CN 1090324C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- piezoelectric
- acceleration transducer
- machine
- piezoelectric substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 74
- 230000035939 shock Effects 0.000 title description 17
- 238000012360 testing method Methods 0.000 title description 17
- 239000000758 substrate Substances 0.000 claims abstract description 274
- 230000001133 acceleration Effects 0.000 claims description 285
- 239000000463 material Substances 0.000 claims description 65
- 238000004519 manufacturing process Methods 0.000 claims description 61
- 239000013078 crystal Substances 0.000 claims description 42
- 230000015572 biosynthetic process Effects 0.000 claims description 31
- 125000002887 hydroxy group Chemical group [H]O* 0.000 claims description 17
- 230000005484 gravity Effects 0.000 claims description 10
- 230000003321 amplification Effects 0.000 claims description 4
- 238000006243 chemical reaction Methods 0.000 claims description 4
- 238000003199 nucleic acid amplification method Methods 0.000 claims description 4
- 125000004429 atom Chemical group 0.000 claims 7
- 125000004430 oxygen atom Chemical group O* 0.000 claims 7
- 125000003178 carboxy group Chemical group [H]OC(*)=O 0.000 claims 1
- 238000007669 thermal treatment Methods 0.000 claims 1
- 229910003327 LiNbO3 Inorganic materials 0.000 abstract description 3
- RZVXOCDCIIFGGH-UHFFFAOYSA-N chromium gold Chemical compound [Cr].[Au] RZVXOCDCIIFGGH-UHFFFAOYSA-N 0.000 abstract description 2
- 230000010287 polarization Effects 0.000 abstract 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 70
- 230000035945 sensitivity Effects 0.000 description 58
- 238000005520 cutting process Methods 0.000 description 49
- 239000007767 bonding agent Substances 0.000 description 33
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 22
- 239000000919 ceramic Substances 0.000 description 20
- 239000000853 adhesive Substances 0.000 description 17
- 230000001070 adhesive effect Effects 0.000 description 17
- 239000010453 quartz Substances 0.000 description 13
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 10
- 239000010408 film Substances 0.000 description 10
- 239000000203 mixture Substances 0.000 description 10
- 239000001301 oxygen Substances 0.000 description 10
- 229910052760 oxygen Inorganic materials 0.000 description 10
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 9
- 230000006835 compression Effects 0.000 description 9
- 238000007906 compression Methods 0.000 description 9
- 230000003116 impacting effect Effects 0.000 description 9
- 229910052814 silicon oxide Inorganic materials 0.000 description 9
- 238000010276 construction Methods 0.000 description 8
- 230000006866 deterioration Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 230000008569 process Effects 0.000 description 7
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000007514 turning Methods 0.000 description 5
- 230000000994 depressogenic effect Effects 0.000 description 4
- 239000003822 epoxy resin Substances 0.000 description 4
- 239000007789 gas Substances 0.000 description 4
- 239000011521 glass Substances 0.000 description 4
- 230000005055 memory storage Effects 0.000 description 4
- 229920000647 polyepoxide Polymers 0.000 description 4
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 3
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 3
- 239000000956 alloy Substances 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 229910052804 chromium Inorganic materials 0.000 description 3
- 239000011651 chromium Substances 0.000 description 3
- 238000013016 damping Methods 0.000 description 3
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 3
- 229910052737 gold Inorganic materials 0.000 description 3
- 239000010931 gold Substances 0.000 description 3
- 229910052759 nickel Inorganic materials 0.000 description 3
- 229910052709 silver Inorganic materials 0.000 description 3
- 239000004332 silver Substances 0.000 description 3
- 238000005476 soldering Methods 0.000 description 3
- 238000001771 vacuum deposition Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- QGZKDVFQNNGYKY-UHFFFAOYSA-N Ammonia Chemical compound N QGZKDVFQNNGYKY-UHFFFAOYSA-N 0.000 description 2
- MHAJPDPJQMAIIY-UHFFFAOYSA-N Hydrogen peroxide Chemical compound OO MHAJPDPJQMAIIY-UHFFFAOYSA-N 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000007797 corrosion Effects 0.000 description 2
- 238000005260 corrosion Methods 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 230000002950 deficient Effects 0.000 description 2
- 239000006185 dispersion Substances 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000001939 inductive effect Effects 0.000 description 2
- 238000003754 machining Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000011259 mixed solution Substances 0.000 description 2
- SWELZOZIOHGSPA-UHFFFAOYSA-N palladium silver Chemical compound [Pd].[Ag] SWELZOZIOHGSPA-UHFFFAOYSA-N 0.000 description 2
- 229920002120 photoresistant polymer Polymers 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 238000005245 sintering Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 101100004280 Caenorhabditis elegans best-2 gene Proteins 0.000 description 1
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 description 1
- 230000009102 absorption Effects 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 229910021529 ammonia Inorganic materials 0.000 description 1
- 235000011114 ammonium hydroxide Nutrition 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000018044 dehydration Effects 0.000 description 1
- 238000006297 dehydration reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000004070 electrodeposition Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- -1 pottery Substances 0.000 description 1
- 238000007639 printing Methods 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229910021332 silicide Inorganic materials 0.000 description 1
- FVBUAEGBCNSCDD-UHFFFAOYSA-N silicide(4-) Chemical compound [Si-4] FVBUAEGBCNSCDD-UHFFFAOYSA-N 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 239000007921 spray Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 230000005676 thermoelectric effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images




















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0891—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values with indication of predetermined acceleration values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0052—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes measuring forces due to impact
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P1/00—Details of instruments
- G01P1/12—Recording devices
- G01P1/127—Recording devices for acceleration values
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/09—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by piezoelectric pick-up
- G01P15/0922—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by piezoelectric pick-up of the bending or flexing mode type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2832—Specific tests of electronic circuits not provided for elsewhere
- G01R31/2834—Automated test systems [ATE]; using microprocessors or computers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/30—Marginal testing, e.g. by varying supply voltage
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/42—Piezoelectric device making
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49005—Acoustic transducer
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49117—Conductor or circuit manufacturing
- Y10T29/49124—On flat or curved insulated base, e.g., printed circuit, etc.
- Y10T29/49126—Assembling bases
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49789—Obtaining plural product pieces from unitary workpiece
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Pressure Sensors (AREA)
- Gyroscopes (AREA)
- Piezo-Electric Or Mechanical Vibrators, Or Delay Or Filter Circuits (AREA)
Abstract
将由具有相对的2个主面的厚50μm、宽0.5m、长2mm的长方形的铌酸锂构成的压电基板(2a、2b)的主面之间以极化轴的方向成为相互相反的方向进行接合,构成压电元件(2)。将由铌酸锂构成的支持体(4a、4b)与压电元件(2)的一端直接接合。在压电元件(2)的相对的2个主面和支持体(4a、4b)上连续地形成由厚度0.2μm的铬-金构成的电极(3a、3b),构成悬臂梁结构的双压电晶片式机-电变换元件(1)。从而,构成本发明的加速度传感器。
Description
本发明涉及加速度的测量和振动的检测等使用的加速度传感器及其制造方法。更详细地说,就是涉及小型、高性能的加速度传感器及其制造方法。
近年来随着电子仪器不断向小型化方向发展,笔记本式电脑等便携式电子仪器得到了普及。为了确保提高这些电子仪器对冲击的可靠性,提高了对小型的可以在表面上实际装配的高性能加速度传感器的要求。
例如,如果在向高密度的硬盘的写入动作中施加了冲击,磁头的位置就会发生偏离,从而有可能引起数据的写入错误和损坏磁头。因此,需要检测加到硬盘上的冲击、使写入动作停止以及使磁头退避到安全的位置的技术。
另外,为了从汽车发生撞车时受到的冲击中保护乘客,也提高了对气袋装置的冲击检测用加速度传感器等的要求。
此外,还提高了对检测施加到便携式小型机器上的冲击、在装置内设置避免冲击引起的机器的故障及误动作的机构和记录施加了冲击的事实的机构及装置的要求。因此,也提高了对这些装置使用的小型加速度传感器的要求。
众所周知,以往,作为加速度传感器,是使用压电陶瓷等压电材料。如果使用这些加速度传感器,通过利用压电材料的电-机变换特性,可以实现高的检测灵敏度。压电式的加速度传感器是利用压电效应将加速度及振动引起的力变换为电压而输出的传感器。作为这样的加速度传感器,有特开平2-248086号公报公开的使用悬臂梁结构的矩形双压电晶片式机-电变换元件的传感器。如图26所示,利用压电效应的双压电晶片式机-电变换元件50是将形成电极52a、52b的压电陶瓷51a、51b利用环氧树脂等粘接剂53相互粘贴而形成的。如图27所示,悬臂梁结构是将双压电晶片式机-电变换元件50的一端利用导电性粘接剂54等粘接固定到固定部件55上而形成的。悬臂梁结构的双压电晶片式机-电变换元件由于其共振频率低,所以,用于测量具有比较低的频率成分的加速度。另外,测量高频区域的加速度时,如图28所示,使用利用导电性粘接剂54等将两端粘接固定到固定部件55上的双臂梁结构的双压电晶片式机-电变换元件50。通过将机-电变换元件的两端固定,可以使共振频率比较高。
加速度传感器在将固定部件55固定到容器的内壁上的状态下通过将机-电变换元件50收容到容器内而构成。另外,在机-电变换元件50的电极52a、52b上产生的电荷通过导电性粘接剂54取出到外部电极。
如上所述,在先有的加速度传感器中,压电陶瓷的粘接是使用由环氧树脂等构成的粘接剂,但是,与压电陶瓷的杨氏模量15×10-12m2/N相比,由于环氧树脂的杨氏模量200×10-12m2/N大,所以,加速度引起的机-电变换元件的畸变将被环氧树脂等吸收,从而灵敏度降低。另外,由于难于使粘接层的厚度均匀地粘接压电陶瓷,所以,机-电变换元件的特性将产生偏差。
另外,为了使矩形的双压电晶片式机-电变换元件的灵敏度稳定,必须使其共振频率稳定。这时,必须使机-电变换元件的固定状态稳定,实际上,由于机械的或温度变化等发生的应力,在用金属等支持部或固定部件支持或固定的部分将发生偏离。例如,使用粘接剂固定机-电变换元件时,其固定位置将随粘接剂的涂抹范围而变化,从而机-电变换元件的共振频率将发生偏差。另外,机-电变换元件的固定状态也随粘接剂的温度变化而变化,从而难于保持稳定的固定状态。
另外,个别地制作一个一个的机-电变换元件后收容到容器内时,在制造工序上手工操作等有困难,影响加速度传感器的小型化,同时,也导致生产效率低下。
另外,由于压电陶瓷是将各种原料混合烧结而制作的,所以,与单晶材料相比,材料常数的偏差大。因此,使用压电陶瓷制作加速度传感器时,灵敏度和电容量将有大的偏差。
另外,使用压电陶瓷的加速度传感器用于检测施加到便携式机器上的冲击时,由于灵敏度的偏差大,所以,作为用于避免冲击引起的机器故障的基准的加速度值的范围增大,从而难于高精度地检测冲击。另外,电容量的偏差使得难于设计与加速度传感器连接的用于放大由加速度产生的电信号的电路,从而将产生电路的放大倍数的偏差。结果,输出信号的偏差增大,从而影响在冲击检测机器中使用。
本发明就是为了解决先有技术的上述课题而提案的,目的旨在提供在宽的频率区域具有高灵敏度而且灵敏度等特性偏差很小的小型的加速度传感器及其制造方法。另外,本发明的目的还在于提供利用了这样的加速度传感器且输出信号的偏差小的冲击检测装置。
为了达到上述目的,本发明的加速度传感器的第1结构包括具有相对的2个主面的至少2个压电基板的上述主面之间直接接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体。按照该加速度传感器的第1结构,由于不使用粘接剂等粘接层,压电基板通过直接接合而构成机-电变换元件,所以,当机-电变换元件由于加速度而发生弯曲振动时,就不存在吸收该弯曲振动的问题。因此,在压电基板上将发生不损失的应力,从而获得大的电动势。结果,可以实现具有高的灵敏度的加速度传感器。另外,由于压电基板的接合是均匀的,所以,机-电变换元件的共振频率及灵敏度的偏差很小。此外,由于在压电基板间不存在粘接层,所以,机-电变换元件的振动特性不会随温度变化而变化。
另外,在上述本发明的加速度传感器的第1结构中,2个压电基板的主面最好是通过使上述2个压电基板的构成原子通过从由氧和羟基构成的群中选择的至少1种相互结合而接合的。按照该极佳的例子,2个压电基板的主面之间可以实现在原子水平上牢固地直接接合的状态。
另外,在上述本发明的加速度传感器的第1结构中,2个压电基板结合起来最好使极化轴的方向成为相互相反的方向。按照该极佳的例子,在2个压电基板中发生的应力不论是压缩应力还是拉伸应力,在2个压电基板上都发生相同极性的电荷。即,在2个压电基板上发生相同方向的电动势。因此,可以从在机-电变换元件的两面上形成的电极获得反映加速度的大小的信号。
另外,在上述本发明的加速度传感器的第1结构中,2个压电基板最好通过缓冲层直接接合。按照该极佳的例子,当接合面上有起伏或凹凸时或者灰尘等异物附着到接合面上时,由于凹凸等被缓冲层吸收,所以,可以获得牢固的直接接合面。另外,即使对于因通过亲水化处理而难于在表面形成氧及羟基的材料接合的情况,通过经由缓冲层进行接合也可以获得牢固的直接接合面。
另外,在上述本发明的加速度传感器的第1结构中,机-电变换元件的一端最好支持在支持体上。按照该极佳的例子,可以实现悬臂梁结构的加速度传感器。
另外,在上述本发明的加速度传感器的第1结构中,机-电变换元件的两端最好支持在支持体上。按照该极佳的例子,可以实现双臂梁结构的加速度传感器。并且,即使是相同长度、相同厚度的机-电变换元件,共振频率也比悬臂梁结构的情况高,所以,可以测量更高的频率区域的加速度。
另外,在上述本发明的加速度传感器的第1结构中,压电基板由晶体结构3m族的单晶压电材料构成,若令上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面最好垂直于与Y轴的夹角为+129°~+152°的轴并且包含X轴,上述压电基板的重心与支持部中心的连线垂直于X轴。按照该极佳的例子,压电基板的压电常数成为最大值的90~100%,不会发生灵敏度劣化的问题。
另外,在上述本发明的加速度传感器的第1结构中,压电基板由晶体结构3m族的单晶压电材料构成,若令上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面最好垂直于与Y轴的夹角为-26°~+26°的轴并且包含X轴,上述压电基板的重心与支持部中心的连线垂直于X轴。按照该极佳的例子,压电基板的压电常数成为最大值的90~100%,不会发生灵敏度劣化的问题。
另外,在上述本发明的加速度传感器的第1结构中,压电基板由晶体结构32族的单晶压电材料构成,若令上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面最好垂直于X轴,上述压电基板的重心与支持部中心的连线与Z轴的夹角为+52°~+86°。按照该极佳的例子,压电基板的压电常数成为最大值的90~100%,不会发生灵敏度劣化的问题。
另外,在上述本发明的加速度传感器的第1结构中,压电基板由晶体结构32族的单晶压电材料构成,若令上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面最好垂直于与X轴的夹角为-26°~+26°的轴并且包含Y轴,上述压电基板的重心与支持部中心的连线平行于Y轴。按照该极佳的例子,压电基板的压电常数成为最大值的90~100%,不会发生灵敏度劣化的问题。
另外,在上述本发明的加速度传感器的第1结构中,压电基板由晶体结构32族的单晶压电材料构成,若令上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面最好垂直于与X轴的夹角为+52°~+68°的轴并且包含Z轴,上述压电基板的重心与支持部中心的连线垂直于Z轴。按照该极佳的例子,压电基板的压电常数成为最大值的90~100%,不会发生灵敏度劣化的问题。
另外,本发明的加速度传感器的第2结构包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体,是上述机-电变换元件与上述支持体直接接合的结构。按照该加速度传感器的第2结构,由于不使用粘接剂,机-电变换元件与支持体直接接合,所以,机-电变换元件的支持位置的偏差减小。结果,可以实现共振频率的偏差小的加速度传感器。另外,由于不使用粘接剂,机-电变换元件与支持体直接接合,所以,加速度可以不损失地传递给机-电变换元件。另外,由于在机-电变换元件与支持体之间不存在粘接层,所以,支持状态也不会随温度变化而变化。
另外,在上述本发明的加速度传感器的第2结构中,构成机-电变换元件的压电基板和支持体最好是通过使上述压电基板的构成原子和上述支持体的构成原子通过从由氧及羟基构成的群中选择的至少一种相互结合而接合的。
另外,在上述本发明的加速度传感器的第2结构中,构成机-电变换元件的压电基板和支持体最好通过缓冲层直接接合。
另外,在上述本发明的加速度传感器的第2结构中,压电基板和支持体最好由相同的材料构成。按照该极佳的例子,由于不受温度引起的畸变的影响,所以,可以实现对温度变化非常稳定的加速度传感器。
另外,在上述本发明的加速度传感器的第2结构中,机-电变换元件的一端最好支持在支持体上。
另外,在上述本发明的加速度传感器的第2结构中,机-电变换元件的两端最好支持在支持体上。
另外,本发明的加速度传感器的第3结构包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件、支持上述机-电变换元件的支持体和收容上述机-电变换元件的容器,上述支持体与上述容器直接接合。按照该加速度传感器的第3结构,由于不使用粘接剂,机-电变换元件的支持体与容器直接接合,所以,支持体成为与容器牢固地接合的状态。结果,可以实现在实际装配面上产生的加速度通过容器不损失地传递给支持体的灵敏度高的加速度传感器。
另外,在上述本发明的加速度传感器的第3结构中,容器和支持体最好是通过使上述容器的构成原子和上述支持体的构成原子通过从由氧及羟基构成的群中选择的至少一种相互结合而接合的。
另外,在上述本发明的加速度传感器的第3结构中,容器和支持体最好通过缓冲层直接接合。
另外,在上述本发明的加速度传感器的第3结构中,容器和支持体最好由相同的材料构成。
另外,本发明的加速度传感器的第4结构包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件、支持上述机-电变换元件的支持体和收容上述机-电变换元件的容器,通过构成上述压电元件的上述压电基板与上述容器直接接合,支持上述机-电变换元件。按照该加速度传感器的第4结构,由于不使用粘接剂,构成压电元件的压电基板与容器直接接合,所以,机-电变换元件成为与容器牢固地接合的状态。结果,可以将容器受到的加速度不损失地传递给机-电变换元件,所以,可以实现灵敏度高的加速度传感器。另外,由于容器担任了支持部件的作用,所以,可以减少结构部件的数量。
另外,在上述本发明的加速度传感器的第4结构中,压电基板和容器最好是通过使上述压电基板的构成原子和上述容器的构成原子通过从由氧及羟基构成的群中选择的至少一种相互结合而接合的。
另外,在上述本发明的加速度传感器的第4结构中,压电基板和容器最好通过缓冲层直接接合。
另外,在上述本发明的加速度传感器的第4结构中,压电基板和容器最好由相同的材料构成。
另外,在上述本发明的加速度传感器的第4结构中,在压电元件中,机-电变换元件以外的部分最好具有导电层。按照该极佳的例子,即使是悬臂梁结构,也可以在支持部的相反一侧设置外部电极。另外,由于可以在机-电变换元件的所有面上设置电极,所以,可以获得灵敏度高的加速度传感器。
另外,本发明的加速度传感器的第5结构包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件、支持上述机-电变换元件的支持体和收容上述机-电变换元件的由至少两部分构成的容器,构成上述容器的各部分之间直接接合。按照该加速度传感器的第5结构,由于不使用粘接剂,构成容器的各部分之间牢固地接合,所以,接合面的耐热性高。结果,即使进行回流焊接,接合部也不会发生气体,构成容器的各部分之间成为气密封闭的状态,所以,可以获得具有特性不劣化的可靠性高的加速度传感器。
另外,在上述本发明的加速度传感器的第5结构中,构成容器的各部分最好是通过使容器的构成原子通过从由氧和羟基构成的群中选择的至少一种相互结合而接合的。
另外,在上述本发明的加速度传感器的第5结构中,构成容器的各部分之间最好通过缓冲层直接接合。
另外,本发明的加速度传感器的制造方法的第1结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体的加速度传感器的制造方法,其特征在于:通过使上述2个压电基板的上述主面之间直接接合而形成上述压电元件。按照该加速度传感器的制造方法的第1结构由于不使用粘接剂等粘接层,通过使压电基板直接接合而形成机-电变换元件,所以,可以获得不吸收加速度引起的在机-电变换元件中发生的弯曲振动的加速度传感器。
另外,在上述本发明的加速度传感器的制造方法的第1结构中,最好将经过亲水化处理的2个压电基板的主面接合后,通过进行热处理将上述2个压电基板的上述主面直接接合。按照该极佳的例子,2个压电基板的主面之间通过氧或羟基可以实现在原子水平上牢固地直接接合的状态。
另外,本发明的加速度传感器的制造方法的第2结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体的加速度传感器的制造方法,其特征在于:将上述支持体与构成上述压电元件的上述压电基板直接接合。按照该加速度传感器的制造方法的第2结构,由于不使用粘接剂,将机-电变换元件与支持体直接接合,所以,可以获得机-电变换元件的支持位置偏差小的加速度传感器。结果,可以实现共振频率偏差小的加速度传感器。
另外,在上述本发明的加速度传感器的制造方法的第2结构中,最好将经过亲水化处理的支持体与压电基板接合后,通过进行热处理将上述支持体与上述压电基板直接接合。
另外,本发明的加速度传感器的制造方法的第3结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件、支持上述机-电变换元件的支持体和收容上述机-电变换元件的容器的加速度传感器的制造方法,其特征在于:将上述支持体与上述容器直接接合。按照该加速度传感器的制造方法的第3结构,可以将支持体与容器牢固地接合。结果,由于可以将在实际装配面上产生的加速度通过容器不损失地传递给支持体,所以,可以实现灵敏度高的加速度传感器。
另外,在上述本发明的加速度传感器的制造方法的第3结构中,最好将经过亲水化处理的支持体与容器接合后,通过进行热处理将上述支持体与上述容器直接接合。
另外,本发明的加速度传感器的制造方法的第4结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和收容上述机-电变换元件的容器的加速度传感器的制造方法,其特征在于:将构成上述压电元件的压电基板与上述容器直接接合。按照该加速度传感器的制造方法的第4结构,可以将机-电变换元件与容器牢固地接合。结果,由于可以将容器受到的加速度不损失地传递给机-电变换元件,所以,可以实现灵敏度高的加速度传感器。另外,由于可以使容器担任支持部件的作用,所以,可以减少结构部件的数量,同时,可以使制造工序简化。
另外,在上述本发明的加速度传感器的制造方法的第4结构中,最好将经过亲水化处理的压电基板与容器接合后,通过进行热处理将上述压电基板与上述容器直接接合。
另外,本发明的加速度传感器的制造方法的第5结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件、支持上述机-电变换元件的支持体和收容上述机-电变换元件的由至少两部分构成的容器的加速度传感器的制造方法,其特征在于:将上述容器的各部分之间直接接合。按照该加速度传感器的制造方法的第5结构,由于不使用粘接剂,可以将构成容器的各部分之间牢固地接合,所以,可以提高接合面的耐热性。结果,即使进行回流焊接,也不会从接合部发生气体,构成容器的各部分之间成为气密封闭的状态,所以,可以实现特性不劣化的可靠性高的加速度传感器。
另外,在上述本发明的加速度传感器的制造方法的第5结构中,最好将经过亲水化处理的容器的各部分之间接合后,通过进行热处理将上述容器的各部分之间直接接合。
另外,本发明的加速度传感器的制造方法的第6结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和收容上述机-电变换元件的容器的加速度传感器的制造方法,其特征在于:具有将用模型形成了多个悬臂梁部或双臂梁部的至少2个压电基板直接接合形成多个压电元件的工序、将在与上述压电元件对应的部位形成凹部的容器与上述压电基板直接接合的工序和分离为包含上述压电元件的各个加速度传感器的工序。按照该加速度传感器的制造方法的第6结构,由于机-电变换元件是由压电基板用模型形成的结构,所以,机-电变换元件的形状的偏差小。另外,由于机-电变换元件是与支持部同时形成的,所以,机-电变换元件的支持状态的偏差小。因此,由于悬臂梁或双臂梁的长度的偏差小,所以,可以实现共振频率等特性偏差非常小的加速度传感器。另外,由于用同一种材料形成机-电变换元件和支持部及容器,所以,可以实现不受温度引起的畸变等的影响的稳定性优异的加速度传感器。另外,由于是1次在1块基板上制作多个加速度传感器,所以,可以实现生产效率高的加速度传感器。
另外,在上述本发明的加速度传感器的制造方法的第6结构中,最好在形成压电元件后,在上述压电元件的相对的2个主面上形成电极。按照该极佳的例子,由于已形成了压电元件,所以,在形成电极时容易对准掩模的位置等,并且,可以只在压电元件上高精度地形成电极。结果,可以获得精度高的机-电变换元件。另外,这时,在压电元件的相对的2个主面上形成电极时,最好同时在压电基板上形成导电层。按照该极佳的例子,可以简化制造工序。
另外,在上述本发明的加速度传感器的制造方法的第6结构中,在压电基板上形成电极后,最好用模型形成悬臂梁部或双臂梁部。按照该极佳的例子,即使未将电极位置高精度地对准,也可以制作机-电变换元件。另外,压电元件薄时,在形成梁部后形成电极时,有时正反面的电极会发生短路,但是,按照该极佳的例子,可以避免发生这一问题。另外,这时,在形成电极时最好同时在压电基板上形成导电层。
另外,本发明的加速度传感器的制造方法的第7结构是包括具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和收容上述机-电变换元件的容器的加速度传感器的制造方法,其特征在于:具有在将至少2个压电基板直接接合后用模型形成多个悬臂梁部或双臂梁部从而形成多个压电元件的工序、将在与上述压电元件对应的部位形成凹部的容器与上述压电基板直接接合的工序和分离为包含上述压电元件的各个加速度传感器的工序。
另外,在上述本发明的加速度传感器的制造方法的第7结构中,最好在形成压电元件后,在上述压电元件的相对的2个主面上形成电极。另外,这时,在压电元件的相对的2个主面上形成电极时,最好同时在压电基板上形成导电层。
另外,在上述本发明的加速度传感器的制造方法的第7结构中,最好在压电基板上形成电极后,形成悬臂梁或双臂梁的结构。另外,这时,在形成电极时最好同时在压电基板上形成导电层。
另外,本发明的冲击检测装置的结构包括具有由具有相对的2个主面的至少2个压电基板的上述主面之间接合而构成的压电元件和由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体的加速度传感器、将从上述加速度传感器输出的信号进行变换及放大的放大电路、将从上述放大电路输出的信号与作为基准的信号进行比较的比较电路、控制装上了上述加速度传感器的机器的控制电路和记录冲击的存储装置。按照该冲击检测装置的结构,由于不存在加速度传感器的灵敏度的偏差和电容量的偏差,所以,可以实现加速度的测量精度高、对于作为检测冲击时的基准的值可以使用比较电路进行正确的判断、同时可以检测并记录冲击以及可以由控制电路判断并指示进行保护机器免受冲击的动作的冲击检测装置。
图1是表示用于本发明第1实施例的加速度传感器的机-电变换元件的斜视图。
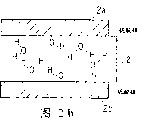
图2是表示用于本发明第1实施例的加速度传感器的机-电变换元件的制造方法的直接接合的各阶段的压电基板的界面状态的说明图。
图3是表示用于本发明第1实施例的加速度传感器的机-电变换元件的其他例子的斜视图。
图4是表示本发明第1实施例的悬臂梁结构的双压电晶片式机-电变换元件的斜视图。
图5是表示本发明第1实施例的悬臂梁结构的双压电晶片式机-电变换元件的剖面图。
图6是表示本发明第1实施例的加速度传感器的一例的分解斜视图。
图7是表示在本发明第1实施例的悬臂梁结构的双压电晶片式机-电变换元件中发生弯曲振动时的情况的说明图。
图8是表示压电基板的晶体轴与切割角的关系的图。
图9是表示铌酸锂基板的切割角与压电常数的关系的图。
图10是本发明第1实施例的加速度传感器的频率特性图。
图11是表示本发明第1实施例的加速度传感器的切割角的图。
图12是表示石英基板的切割角与压电常数的关系的图。
图13是表示石英基板的切割角与压电常数的关系的图。
图14是表示石英基板的切割角与压电常数的关系的图。
图15是表示用于本发明第2实施例的加速度传感器的机-电变换元件的剖面图。
图16是表示本发明第2实施例的加速度传感器的一例的分解斜视图。
图17是表示本发明第2实施例的加速度传感器的一例的剖面图。
图18是表示本发明第2实施例的加速度传感器的其他例的分解斜视图。
图19是表示本发明第3实施例的加速度传感器的制造方法的工序图。
图20是表示本发明第3实施例的加速度传感器的制造方法的工序图。
图21是表示本发明第4实施例的加速度传感器的一例的分解斜视图。
图22是表示本发明第4实施例的加速度传感器的其他例的分解斜视图。
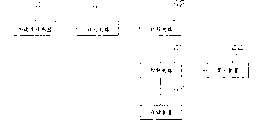
图23是本发明第5实施例的冲击检测装置的电路结构图。
图24是表示本发明第5实施例的冲击检测装置的放大电路的电路图。
图25是表示用本发明第5实施例的冲击检测装置测量时的输出与加速度的关系的图。
图26是表示先有技术的双压电晶片式机-电变换元件的斜视图。
图27是表示先有技术的悬臂梁结构的双压电晶片式机-电变换元件的剖面图。
图28是表示先有技术的双臂梁结构的双压电晶片式机-电变换元件的剖面图。
(第1实施例)
图1是表示用于本发明第1实施例的加速度传感器的机-电变换元件的斜视图。如图1所示,由具有相对的2个主面的厚50μm、宽0.5mm、长2mm的长方形的铌酸锂(LiNbO3)构成的压电基板2a、2b,其主面之间直接接合,以此构成压电元件2。这里,压电基板2a和压电基板2b以极化轴的方向成为相互相反的方向进行接合。在压电元件2的相对的2个主面上分别形成由厚0.2μm的铬-金构成的电极3a、3b。以此构成双压电晶片式的机-电变换元件1。
下面,说明具有上述结构的机-电变换元件的制造方法的一例。
图2是表示用于本发明第1实施例的加速度传感器的机-电变换元件的制造方法的直接接合的各阶段的压电基板的界面状态的说明图。图2中,L1、L2、L3表示压电基板间的距离。首先,将压电基板2a、2b即2块铌酸锂基板的两面进行镜面研磨。然后,将这些压电基板2a、2b通过用氨和过氧化氢及水的混合溶液(氨水∶过氧化氢水∶水=1∶1∶6(容量比))进行清洗,对压电基板2a、2b进行亲水化处理。如图2(a)所示,上述混合溶液清洗过的压电基板2a、2b的表面以羟基(-OH基)进行终端处理,成为亲水性(接合前的状态)。
其次,如图2(b)所示,将进行了亲水化处理的2块压电基板(铌酸锂)2a、2b以极化轴的方向成为相互相反的方向进行接合(L1>L2)。这样,引起脱水,压电基板(铌酸锂)2a和压电基板(铌酸锂)2b便由于-OH重合及氢结合等的引力相互吸引而接合。
然后,对上述接合的压电基板(铌酸锂)2a、2b在450℃下进行热处理。这样,如图2(c)所示,压电基板(铌酸锂)2a的构成原子和压电基板(铌酸锂)2b的构成原子之间便通过氧(O)成为共价键结合的状态(L2>L3),压电基板2a、2b在原子水平上牢固地直接接合在一起。即,可以获得在接合的界面不存在粘接剂等粘接层的结合状态。或者,有时压电基板(铌酸锂)2a的构成原子和压电基板(铌酸锂)2b的构成原子之间也通过羟基成为共价键结合的状态,压电基板2a、2b在原子水平上牢固地直接接合在一起。。
铌酸锂的居里点是1210℃,由于通过与此接近的温度经历,特性将恶化,所以,希望热处理温度小于居里点。
通过将希望接合的经过镜面研磨的面进行表面处理后使其接触而不通过粘接剂等粘接层在界面间直接发生的接合称为「直接接合」。通常,通过进行热处理形成,由分子力形成的接合即共价键结合及离子结合等原子水平的强力的接合。
然后,在直接接合的压电基板(铌酸锂)2a、2b即压电元件的相对的2个主面上利用真空镀膜法镀上铬-金膜,形成电极3a、3b(参见图1)。最后,使用切割锯切割加工成指定大小的短牌子状,从而制作成双压电晶片式机-电变换元件1。
如图3所示,直接接合也可以通过由氧化硅薄膜等构成的缓冲层46进行。即,在压电基板2a的一边的主面上形成由厚0.1μm的氧化硅薄膜等构成的缓冲层46,对该缓冲层46和另一个压电基板2b进行亲水化处理后,将两者重合,通过进行热处理,压电基板2b的构成原子和缓冲层46的构成原子通过氧或羟基进行接合。即使在接合面上有起伏及凹凸时或者有灰尘等异物附着到接合面上时,因为由缓冲层46吸收凹凸等,所以,可以很容易地进行直接接合。另外,即使对于因亲水化处理而难于在表面上形成氧及羟基的材料接合的情况,通过缓冲层46进行接合,也可以很容易地进行直接接合。这时,缓冲层既可以只设置在预定进行接合的面的一万,也可以设置在双方的面上。另外,作为缓冲层的材料,除了氧化硅外,还可以使用例如氮化硅、金属硅化物等。
图4是表示本发明第1实施例的悬臂梁结构的双压电晶片式机-电变换元件的斜视图,图5是其剖面图。如图4、图5所示,由具有相对的2个主面的厚50μm、宽0.5mm、长2mm的长方形的铌酸锂构成的压电基板2a、2b,其主面之间直接接合,以此构成压电元件2。这里,压电基板2a和压电基板2b以极化着的方向成为相互相反的方向进行接合。压电元件2的一端以被由LiNbO3构成的支持体4a、4b夹持的状态进行固定。这里,压电元件2与支持体4a、4b直接接合。这时,压电元件2与支持体4a、4b的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。在压电元件2的相对的2个主面上,分别形成由厚0.2μm的铬-金构成的电极3a、3b,这些电极3a、3b也在支持体4a、4b上连续地形成。这样,就构成了悬臂梁结构的双压电晶片式机-电变换元件1。
图6是表示本发明第1实施例的加速度传感器的一例的分解斜视图。如图6所示,具有图4、图5所示的结构的悬臂梁结构的双压电晶片式机-电变换元件1收容到由利用腐蚀等方法在中央部形成凹陷部的铌酸锂构成的容器10b内。即,在双压电晶片式机-电变换元件1的支持体4a、4b以外的部分保持在凹陷部上的状态下,双压电晶片式机-电变换元件1的支持体4a、4b利用导电性胶5a、5b(5a图中未示出)固定到容器10b上。由同样在中央部形成凹陷部的铌酸锂构成的容器10a与容器10b重叠粘接。这样,整个双压电晶片式机-电变换元件1就被容器10a、10b所覆盖。在容器10b的内部,形成由银-钯构成的导电层7a、7b,导电层7a、7b的一端通过导电性胶5a、5b分别与双压电晶片式机-电变换元件1的电极3a、3b电气连接。另外,在容器10a、10b的两端面上形成由镍构成的外部电极9a、9b,导电层7a、7b的另一端分别与外部电极9a、9b电气连接。即,双压电晶片式机-电变换元件1的电极3a、3b通过导电性胶5a、5b和导电层7a、7b分别与外部电极9a、9b电气连接。这样,便可将双压电晶片式机-电变换元件1发生的电荷取出到外部。利用上述结构构成加速度传感器100。
当加速度加到安装图6所示的加速度传感器100的物体上时,与加速度成正比的力便通过容器10a、10b、支持体4a、4b传递给机-电变换元件1。在上下方向(图4的箭头方向)产生加速度时,机-电变换元件1就沿上下方向弯曲,发生弯曲振动。该情况示于图7。若考虑由压电基板2a、2b构成的机-电变换元件1向下方弯曲的情况(图7的实线),由于压电基板2a相对于机-电变换元件1的中心轴位于上侧,所以,在压电基板2a中将发生在张力作用下被拉伸那样的畸变。另一方面,由于压电基板2b相对于机-电变换元件1的中心轴位于下侧,所以,在压电基板2b中将发生在压缩力作用下收缩的畸变。
在将压电陶瓷基板粘接而制作的先有的机-电变换元件的情况下,由于在压电基板间存在比压电基板柔软的粘接剂,所以,机-电变换元件沿上下方向弯曲时,弯曲振动将被粘接剂吸收,从而在压电基板中产生的应力将减小。因此,在压电基板中发生的电动势也减小。
但是,本实施例的机-电变换元件1由于是通过将压电基板2a、2b直接接合而制作的,所以,在压电基板2a、2b间不存在粘接剂等粘接层。即,当机-电变换元件1由于加速度而发生弯曲振动时,就不存在吸收该弯曲振动的问题。因此,在压电基板2a、2b中发生不损的地应力,从而可以获得大的电动势。结果,可以实现具有高的灵敏度的加速度传感器。另外,由于压电基板2a、2b的接合状态均匀,所以,机-电变换元件1的共振频率及灵敏度的偏差非常小。此外,由于在压电基板2a、2b间不存在粘接层,所以,机-电变换元件1的振动特性不会随温度变化而变化。
另外,由于支持体4a、4b与机-电变换元件1在原子水平上牢固地接合,所以,加到安装容器10a、10b的物体上的加速度不损失地传递给机-电变换元件1。
在由铌酸锂等构成的压电基板2a、2b中,在压电基板2a、2b的上下面发生由压缩应力、拉伸应力引起的电荷,但是,由于压电基板2a和压电基板2b以极化轴的方向成为相互相反的方向接合的,所以,尽管在压电基板2a、2b中发生的应力不同,一为压缩应力,一为拉伸应力,但是,在压电基板2a和压电基板2b上却发生相同极性的电荷。即,在压电基板2a和压电基板2b上发生相同方向的电动势(参见图7)。因此,可以从在机-电变换元件1的两面形成的电极3a、3b获得反映加速度的大小的信号。如果将铌酸锂基板的厚度方向设定为Y′轴方向,将长度方向设定为Z′轴方向,则压缩应力及拉伸应力将沿Z′轴方向作用,电荷沿Y′轴方向发生。这时,发生的电荷量与压电常数d23′关系极大。另外,该压电常数d23′的大小随将Y′轴、Z′轴相对于晶体轴取在哪个方向而变化很大。即,加速度传感器的灵敏度随Y′轴和Z′轴的方向而变化很大。当适当地设定Y′轴和Z′轴,选择使压电常数d23′的大小的绝对值为最大的切割角时,便可获得灵敏度最好的加速度传感器。
图8是铌酸锂基板的晶体轴与切割角的关系。在图8中,X轴、Y轴、Z轴表示铌酸锂的晶体轴的方向,X′轴(=X轴)、Y′轴、Z′轴表示以X轴为中心将Y轴转动θ角时的正交轴。即,X′轴(=X轴)、Y′轴、Z′轴表示铌酸锂基板的切割方向。如图8所示的那样设定各轴的方向时,将铌酸锂基板的厚度方向设定为X′轴方向、将长度方向设定为Y′轴方向时,压电常数d12′与加速度传感器的灵敏度的关系极大。另外,将铌酸锂基板的厚度方向设定为X′轴方向、将长度方向设定为Z′轴方向时,压电常数d13′与加速度传感器的灵敏度的关系极大。另外,将铌酸锂基板的厚度方向设定为Y′轴方向、将长度方向设定为X′轴方向时,压电常数d21′与加速度传感器的灵敏度的关系极大。另外,将铌酸锂基板的厚度方向设定为Y′轴方向、将长度方向设定为Z′轴方向时,压电常数d23′与加速度传感器的灵敏度的关系极大。另外,将铌酸锂基板的厚度方向设定为Z′轴方向、将长度方向设定为X′轴方向时,压电常数d31′与加速度传感器的灵敏度的关系极大。另外,将铌酸锂基板的厚度方向设定为Z′轴方向、将长度方向设定为Y′轴方向时,压电常数d32′与加速度传感器的灵敏度的关系极大。
图9是铌酸锂基板的切割角与压电常数的关系。如图9所示,切割角为140°时,压电常数d23′具有极大值。实际改变切割角制作机-电变换元件时的实验结果示于下述表1和图10。
表1
| 切割角[°] | 压电常数d23′[C/N] | 灵敏度[mV/G] |
| Y-切割135°Z′方向 | -2.99×10-11 | 6.1 |
| Y-切割135°X方向 | 1.40×10-11 | 3.7 |
| Y-切割140°Z′方向 | -3.06×10-11 | 6.4 |
| Y-切割140°X方向 | 1.53×10-11 | 3.8 |
| Y-切割165°Y方向 | 1.98×10-11 | 4.6 |
| Z-切割0°X方向 | 0.0 | 无灵敏度 |
| Z-切割0°Y方向 | 0.0 | 无灵敏度 |
由上述表1所示可知,使用压电常数最大的Y-切割140°基板,以Z′轴方向为长度方向的机-电变换元件发生的电荷最多,灵敏度最佳。图11是这时的加速度传感器的切割角的关系。以图11所示的X轴为中心将Y轴转动140°、将电极设置在与Y′轴垂直的面上、将长度方向设定为Z′轴方向的加速度传感器具有最高的灵敏度。
铌酸锂的晶体结构是三角晶系的3m族,是以Z轴为中心3次对称结构。因此,存在数个具有同一压电常数的切割角。例如,如图9所示,切割角50°和230°的压电常数d32′与切割角140°和320°的压电常数d23′为相同的值。如果考虑晶体的对称性,即可明白这一点。
此外,在灵敏度最大的最佳切割角附近的切割角,压电常数与切割角的关系比较小,即使未严格地使切割角为最佳,也可以获得几乎相同的灵敏度。如果想严格地使切割角为最佳切割角,则通过严格地规定切割角的加工的高精度化、为了抑制偏差的工序的复杂化引起的加工费用的增加以及合格率降低引起的单价的增加将成为问题。就压电常数d23′而言,如图9所示,最佳切割角为140°,但是,只要切割角处于129°~152°的范围内,压电常数就成为最大值的90~100%,就不会发生灵敏度恶化的问题。另外,将铌酸锂基板的厚度方向设定为Y′轴方向、将长度方向设定为X轴方向时,加速度传感器的灵敏度与压电常数d21′有关。如图9所示,压电常数d21′与切割角的关系比压电常数d23′与切割角的关系小。这时,只要切割角处于最佳切割角±26°以内,压电常数就成为最大值的90~100%的值,从而不会发生灵敏度恶化的问题。因此,即使未高精度地加工切割角,也可以制作高灵敏度的加速度传感器,所以,加工费用廉价。如果2块压电基板的切割角有差别,就存在由压电体的热电效应产生的电荷不能抵消的问题,所以,最好2块压电基板的切割角的差别越小越好,但是,由于压电常数与切割角的关系不大,所以,只要构成机-电变换元件的2块压电基板的切割角的差别在1°以内就可以。
机-电变换元件的长度、厚度和宽度通过考虑作为测量对象的加速度的频率范围而决定。测量的加速度的频率越接近机-电变换元件的共振频率,加速度传感器的灵敏度越高。厚度50μm的2块铌酸锂基板直接接合、从前端到支持体的长度设定为2mm的悬臂梁结构的机-电变换元件1的共振频率为20kHz。由图10的灵敏度与加速度的频率的测量结果可知,加速度的频率大于10kHz时,由于接近机-电变换元件1的共振频率,所以,灵敏度增高。在测量频率范围内,为了使加速度传感器的灵敏度与频率的关系不大,必须使共振频率远离测量频率范围。因此,例如,可以将机-电变换元件1设计为共振频率成为最高测量频率的2倍的频率。如上所述,机-电变换元件1的共振频率取决于其长度和厚度。先有的使用压电陶瓷的加速度传感器的情况,机-电变换元件的支持是通过粘接剂进行的。控制粘接剂的涂抹量是困难的,由于粘接剂的溢出等机-电变换元件的实际长度将会变短,从而偏差增大。因此,在先有的使用压电陶瓷的加速度传感器的情况下,由于机-电变换元件的共振频率偏差,所以,存在高频区域的灵敏度将产生偏差,或者可测量的频率随各个加速度传感器而变化等问题。在本实施例的情况下,由于将支持体4a、4b与机-电变换元件1直接接合,所以,机-电变换元件1的长度的偏差非常小。结果,机-电变换元件1的共振频率的偏差就非常小,从而各个加速度传感器在高频区域的灵敏度及测量频率范围的变化就非常小。
作为压电材料而使用的铌酸锂是单晶,其压电常数、介电常数、弹性常数等的偏差非常小。对于压电陶瓷,这些材料常数通常有约20%的偏差。因此,使用压电陶瓷的加速度传感器的灵敏度和共振频率也有约20%的偏差。但是,在将铌酸锂基板直接接合而制作的本实施例的加速度传感器中,灵敏度和共振频率都可以将其偏差抑制到小于5%。
此外,压电陶瓷随时间的变化大,缺乏稳定性。因此,使用压电陶瓷的加速度传感器存在灵敏度随时间而变化约10~15%的问题。但是,将铌酸锂基板直接接合而制作的本实施例的加速度传感器非常稳定,随时间的变化小于2%。
作为压电基板2a、2b的材料,可以是能够直接接合的单晶压电材料,除了铌酸锂外,还可以使用钽酸锂(LiTaO3)、石英、Langasite型压电晶体等。作为Langasite型压电晶体,有:La3Ga5SiO14;La3Ga5.5Nb0.5O14;La3Ga5.5Ta0.5O14。钽酸锂的晶体结构和铌酸锂一样,是三角晶系的3m族,其最佳切割角和铌酸锂相同。另外,石英及Langasite型压电晶体的晶体结构是三角晶系的32族。图12~图14是具有32族的晶体结构的石英基板的切割角与压电常数的关系。图12是以X轴为旋转轴转动时的切割角与压电常数的关系,图13是以Y轴为旋转轴转动时的切割角与压电常数的关系,图14是以Z轴为旋转轴转动时的切割角与压电常数的关系。另外,由Langasite型压电晶体构成的基板的切割角与压电常数的关系也一样。
在下述表2中一并示出根据图12~图14求出的具有32族的晶体结构的单晶压电材料的最佳切割角和前面所述的具有3m族的晶体结构的单晶压电材料的最佳切割角。
〔表2〕
| 晶体构造 | 物质名 | 最佳切割角(欧拉角) | 最大压电常数 |
| 3m三角晶系 | 铌酸锂钽酸锂 | 140,0,0 | d23′ |
| 0,0,0 | d21′ | ||
| 32三角晶系 | 石英Langasite型压电晶体 | 70,0,0 | d13′ |
| 0,0,0 | d12′ | ||
| 0,0,90 | d21′ |
[备考]进而分别还包括以Z轴为中心转动120°的切割角和以X轴及Y轴为中心转动180°的角度。
在上述表2中,欧拉角的3个数字顺序表示以X轴、Y轴、Z轴为中心的转动角。另外,在上述表2中还示出了最大的压电常数。如上述表2所示,将具有32族的晶体结构的压电体以X轴作为旋转轴转动70°时,最大的压电常数是d13′。这表示将具有32族的晶体结构的压电体以X轴作为旋转轴转动70°时,垂直于转动后的X′轴(=X轴)方向切出压电基板、将压电基板的长度方向设定为Z′轴方向时,灵敏度最高。另外,欧拉角为(0,0,0)时,最大的压电常数为d12′。这表示当欧拉角为(0,0,0)时,垂直于转动后的X′轴(=X轴)方向切出压电基板、将压电基板的长度方向设定为Y′轴方向时,灵敏度最高。另外,欧拉角为(0,0,90)时,最大的压电常数为d21′。这表示当欧拉角为(0,0,90)时,垂直于转动后的Y′轴方向切出压电基板、将压电基板的长度方向设定为X′轴方向时,灵敏度最高。
另外,在具有32族的晶体结构的压电基板(石英、Langasite型压电晶体等)的情况下,对于d13′、d12′和d32′分别在+52°~+86°的范围内、±26°的范围内和+52°~+68°的范围内压电常数成为最大值的90~100%,不会发生灵敏度恶化的问题。因此,即使未高精度地加工切割角,也可以制作高灵敏度的加速度传感器,所以,加工费用廉价。
如上所述,按照本实施例,由于不使用粘接剂等粘接层,通过将压电基板2a、2b牢固地直接接合而形成机-电变换元件1,所以,可以实现无特性偏差和转动衰减等的具有高灵敏度的加速度传感器。另外,由于不使用粘接剂而将机-电变换元件1与支持体4a、4b直接接合,所以,可以高精度地进行机-电变换元件1的位置调整。结果,可以实现悬臂梁的长度和支持状态无偏差而且稳定性高、特性离散度非常小的小型的加速度传感器。另外,由于不使用粘接剂而将机-电变换元件1与支持体4a、4b直接接合,所以,加速度可以不损失地传递给机-电变换元件1。
在本实施例中,作为电极3a、3b的材料,是使用铬-金,但是,不一定限于这种材料,例如,也可以使用金、铬、银或合金材料。
另外,在本实施例中,作为容器10a、10b的材料,是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用钽酸锂、石英、玻璃、塑料、氧化铝等陶瓷等材料。
另外,在本实施例中,将机-电变换元件1采用悬臂梁结构,但是,不一定限于这种结构,也可以将机-电变换元件1的两端与支持体直接接合作成双臂梁结构,另外,还可以将机-电变换元件1的中心与支持体直接接合作为中心支持结构。
(第2实施例)
图15是表示用于本发明第2实施例的加速度传感器的机-电变换元件的剖面图。如图15所示,由具有相对的2个主面的厚50μm、宽0.5mm、长2mm的长方形的铌酸锂构成的压电基板2a、2b其主面之间直接接合,以此构成压电元件2。这里,压电基板2a和压电基板2b以极化轴的方向成为相互相反的方向进行接合。压电元件2的一端以由铌酸锂构成的支持体4a、4b夹持的状态进行固定。这里,压电元件2与支持体4a、4b直接接合。在压电元件2的相对的2个主面上,在未被支持体4a、4b夹持的部分分别形成由厚度0.2μm的铬-金构成的电极3a、3b。这样,便构成悬臂梁结构的双压电晶片式的机-电变换元件1。
图16是表示本发明第2实施例的加速度传感器的一例的分解斜视图,图17是其剖面图。如图16、图17所示,具有图15所示的结构的悬臂梁结构的机-电变换元件1收容在其上面、一端面和一侧面开口的由铌酸锂构成的容器10c内,支持体4a、4b与容器10c的另一端面的内侧直接接合。这时,支持体4a、4b与容器10c的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。在将支持体4a、4b和容器10c重合的状态下,将导电层7c、7d的一端部与电极3a、3b连接,导电层7c、7d的另一端从容器10c的端部露出。由相同的铌酸锂构成的和容器10c形状相同的容器10d与容器10c接合。在容器10c、10d的外面形成由镍构成的外部电极9c、9d,外部电极9c、9d分别与导电层7c、7d电气连接。即,机-电变换元件1的电极3a、3b通过导电层7c、7d与外部电极9c、9d电气连接。这样,便可将机-电变换元件1发生的电荷取出到外部。这样,就构成了加速度传感器102。
在图17所示的加速度传感器102中,在上下方向施加加速度时,机-电变换元件1就沿上下方向振动,发生弯曲振动。发生弯曲振动时,压电基板(铌酸锂)2a、2b的一方发生拉伸畸变,另一方发生压缩畸变。这里,由于压电基板2a和压电基板2b是以极化轴成为相互相反的方向进行接合的,所以,尽管在压电基板2a、2b中发生的应力不同,一为压缩应力,一为拉伸应力,但是,在压电基板2a和压电基板2b上却发生相同极性的电荷。即,在压电基板2a和压电基板2b中发生相同方向的电动势。因此,可以从在机-电变换元件1的两面形成的电极3a、3b获得反映加速度的大小的信号。
图18是表示本发明第2实施例的加速度传感器的其他例的分解斜视图。如图18所示,由具有相对的2个主面的厚50μm、宽0.5mm、长2mm的长方形的铌酸锂构成的压电基板2a、2b其主面之间直接接合,以此构成压电元件2。这里,压电基板2a和压电基板2b以极化轴成为相互相反的方向进行接合。在压电元件2的相对的2个主面上,形成由厚度0.2μm的铬-金构成的电极3a、3b。这样,便构成机-电变换元件1。机-电变换元件1的一端被上下面开口、一分为二的由铌酸锂构成的容器10e、10f夹紧,以此支持机-电变换元件1。这里,容器10e、10f和机-电变换元件1直接接合,另外,容器10e、10f之间也直接接合。这时,容器10e、10f和机-电变换元件1的直接接合或容器10e、10f之间的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。容器10g、10h使用粘接剂与容器10e、10f的上下面粘接固定。这样,机-电变换元件1就被封闭在容器内。在容器的两端面上分别形成由镍构成的外部电极9e、9f,该外部电极9e、9f通过图中未示出的导电层分别与机-电变换元件1的电极3a、3b电气连接。这样,便可将机-电变换元件1发生的电荷取出到外部。另外,在容器10g、10h的内表面设置凹陷部,以使机-电变换元件1弯曲时不会与机-电变换元件1接触。这样,就构成了加速度传感器103。
机-电变换元件1的长度、厚度和宽度考虑作为测量对象的加速度的频率范围进行决定。测量的加速度的频率越接近机-电变换元件1的共振频率,加速度传感器的灵敏度越高。在测量频率范围内,为了使加速度传感器的灵敏度与频率的关系不大,必须使共振频率远离测量频率范围。因此,例如可以将机-电变换元件1设计为共振频率是最高测量频率的2倍的频率。
作为压电材料使用的铌酸锂是单晶,其压电常数、介电常数、弹性常数等的偏差非常小。在压电陶瓷的情况下,这些材料常数通常有约20%的偏差。因此,使用压电陶瓷的加速度传感器的灵敏度和共振频率也有约20%的偏差。但是,在将铌酸锂基板直接接合而制作的本实施例的加速度传感器中,灵敏度和共振频率都可以将偏差抑制到小于5%。
此外,压电陶瓷随时间的变化大,缺乏稳定性。因此,使用压电陶瓷的加速度传感器存在灵敏度随时间而变化约10~15%的问题。但是,将铌酸锂基板直接接合而制作的本实施例的加速度传感器非常稳定,随时间的变化小于2%。
如上所述,按照本实施例,由于不使用粘接剂等粘接层,通过将压电基板2a、2b牢固地直接接合而形成机-电变换元件1,所以,可以实现无特性偏差和振动衰减等的具有高灵敏度的加速度传感器。另外,由于不使用粘接剂而将机-电变换元件1与支持体4a、4b直接接合,所以,可以高精度地进行机-电变换元件1的位置调整。结果,可以实现悬臂梁的长度和支持状态无偏差而且稳定性高、特性离散度非常小的小型的加速度传感器。另外,不使用粘接剂而通过将机-电变换元件1与支持体4a、4b直接接合,加速度可以不损失地传递给机-电变换元件1。另外,由于不使用粘接剂而通过将机-电变换元件1与支持体4a、4b直接接合从而支持体4a、4b与加速度从实际装配面直接传递的容器牢固地接合,所以,加速度可以不损失地传递给机-电变换元件1。
另外,在本实施例中,作为压电基板2a、2b的材料是使用铌酸锂,但是不一定限于这种材料,例如,也可以使用钽酸锂及石英。
另外,在本实施例中,作为电极3a、3b的材料是使用铬-金,但是,不一定限于这种材料,例如,也可以使用金、铬、银或合金材料。
另外,在本实施例中,作为容器的材料是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用玻璃、陶瓷、树脂等。
另外,在本实施例中,作为机-电变换元件1的支持体4a、4b向容器内的固定方式和容器的固定方式是使用直接接合,但是,不一定限于这种方式,使用粘接剂进行固定,也可以发挥同样的特性。
另外,在本实施例中,将机-电变换元件1采用悬臂梁结构,但是,不一定限于这种结构,也可以采用将机-电变换元件1的两端与支持体直接接合的双臂梁结构,另外,还可以采用将机-电变换元件1的中心与支持体直接接合的中心支持结构。
(第3实施例)
下面,说明具有和图16~图18相同的悬臂梁结构的加速度传感器及其制造方法。
图19、图20是表示本发明第3实施例的加速度传感器的制造方法的工序图。
首先,如图19(a)所示,作为压电基板12a、12b,使用铌酸锂基板,利用将感光胶模型作为掩模部件的喷砂法形成悬臂梁部11a、11b。
其次,如图19(b)所示,形成悬臂梁部11a的压电基板12a和形成悬臂梁部11b的压电基板12b通过直接接合而接合。直接接合是在如上述那样将经过亲水化处理的2块压电基板12a、12b以极化轴方向成为相互相反的方向接合后进行热处理而进行的。这时,压电基板12a与压电基板12b的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。
然后,如图19(c)所示,在悬臂梁部的两面,利用真空镀膜法镀上铬-金薄膜形成电极13a、13b。这样,便可获得悬臂梁结构的双压电晶片式机-电变换元件15。机-电变换元件15以压电基板12a、12b的开口周边作为支持部进行支持。另外,在与压电基板12a的电极13a同一侧的面上以与电极13a导通的状态形成导电层14a。该导电层14a用于将在电极13a上发生的电荷取出到外部电极20a(图20(b)、(c))。此外,在与压电基板12b的电极13b同一侧的面上形成导电层14b以使悬臂梁部与压电基板12b的开口的相反一侧(图的右侧)导通。这时,如果将导电层14a或导电层14b与电极13a或电极13b同时形成,便可简化制造工序。
其次,如图20(a)所示,在别的铌酸锂基板上使用将感光胶模型作为掩模部件的喷砂法形成凹部17,制作容器16a、16b。另外,在该容器16a、16b上同时形成用于与压电基板12a、12b上的导电层14a、14b进行电气连接的贯通孔18。
然后,如图20(b)所示,通过将形成机-电变换元件15的压电基板12a、12b与容器16a、16b直接接合而接合。这样,就将机-电变换元件15封闭到容器16a、16b内。这时,压电基板12a、12b与容器16a、16b的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。由于悬臂梁部是由铌酸锂基板与支持部同时利用模型形成的,所以,支持部也具有可弯曲性,利用兼作容器16a、16b和支持部的别的铌酸锂基板更牢固地支持。由于在压电基板(铌酸锂)12a、12b与容器(铌酸锂)16a、16b的接合部形成导电层(铬-金)14a、14b,所以,难于将压电基板12a、12b与容器16a、16b直接接合,但是,如果使压电基板12a、12b和容器16a、16b的接合面积与导电层14a、14b的面积相比足够大,就可以牢固地接合。接着,将导电性胶灌入容器16a、16b的贯通孔18内,通过烧结形成竖直导电部19a、19b用以与导电层14a、14b电气连接。此外,在容器16a、16b的上面,印刷银-钯,用以与竖直导电部19a、19b导通,形成外部电极20a、20b。这样,机-电变换元件15上的电极13a、13b与外部电极20a、20b便形成电气连接。
其次,如图20(c)所示,使用切割锯将基板切割为各个加速度传感器104。机-电变换元件15具有悬臂梁结构,与容器16a、16b牢固地接合。
在图20(c)的加速度传感器104中,沿上下方向施加加速度时,机-电变换元件15就沿上下方向振动,从而发生弯曲振动。发生弯曲振动时,压电基板12a、12b的一方发生拉伸畸变,另一方发生压缩畸变。这里,由于压电基板12a和压电基板12b是以极化轴的方向成为相互相反方向进行接合的,所以,尽管在压电基板12a和压电基板12b中发生的应力不同,一为压缩应力,一为拉伸应力,但是,在压电基板12a和压电基板12b上却发生相同极性的电荷。即,在压电基板12a和压电基板12b中发生相同方向的电动势。因此,可以从在机-电变换元件15的两面形成的电极13a、13b获得反映加速度的大小的信号。
机-电变换元件15的长度、厚度和宽度考虑作为测量对象的加速度的频率范围进行决定。测量的加速度的频率越接近机-电变换元件15的共振频率,加速度传感器104的灵敏度越高。在测量频率范围内,为了使加速度传感器104的灵敏度与频率的关系不大,必须将机-电变换元件15设计为共振频率是最高测量频率的2倍的频率。
如上所述,按照本实施例,由于不使用粘接剂等粘接层而通过将压电基板12a、12b牢固地直接接合形成机-电变换元件15,所以,可以实现无特性偏差和振动衰减等、具有高灵敏度的加速度传感器104。另外,由于机-电变换元件15是由压电基板利用模型形成的,所以,机-电变换元件15的形状的偏差小。另外,由于机-电变换元件15与支持部同时形成,所以,机-电变换元件15的支持状态的偏差小。因此,悬臂梁的长度的偏差小,从而可以实现共振频率等特性偏差非常小的加速度传感器。另外,由于可以用同一种材料形成机-电变换元件15、支持部件和容器16a、16b,所以,可以实现不受温度引起的畸变等的影响的稳定性优异的小型的加速度传感器。另外,由于在1块基板上1次制作大量的加速度传感器,所以,可以实现生产效率优异的加速度传感器。
在本实施例中,作为容器12a,12b的材料,是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用钽酸锂、石英。
在本实施例中,作为容器16a、16b的材料,是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用钽酸锂、石英、硅、玻璃等材料。最好使用与构成机-电变换元件15的压电基板12a、12b相同的材料,最理想的是与构成机-电变换元件15的压电基板12a、12b的材料热膨胀系数接近的材料。
另外,在本实施例中,作为电极13a、13b的材料,是使用铬-金,但是不一定限于这种材料,例如,也可以使用金、铬、银或合金材料。
另外,在本实施例中,作为竖直导电部19a、19b的材料,是使用导电性胶,但是,不一定限于这种材料,例如,也可以使用焊锡及银焊料等。
另外,在本实施例中,在压电基板(铌酸锂)12a、12b上形成悬臂梁部11a、11b后,通过将它们直接接合而形成双压电晶片式的机-电变换元件15,但是,不一定限于这一顺序,也可以在将2块压电基板(铌酸锂)12a、12b直接接合后形成悬臂梁部11a、11b。
另外,在本实施例中,在形成悬臂梁部11a、11b后形成电极13a、13b,但是,不一定限于这一顺序,也可以在形成电极13a、13b后形成悬臂梁部11a、11b。
另外,在本实施例中,作为压电基板12a、12b上的悬臂梁部11a、11b的加工方法和容器16a、16b的凹部17及贯通孔18的加工方法,使用喷砂法,但是,不一定限于这种方法,例如,也可以使用乾腐蚀、湿腐蚀、激光加工、离子束加工、切割及线锯等机械加工、喷射加工和放电加工等。
另外,在本实施例中,作为电极13a、13b的形成方法,是使用真空镀膜法,但是,不一定限于这种方法,例如,也可以使用溅射法、CVD法等气相成膜法及电镀和印刷等方法。
另外,在本实施例中,将外部电极20a、20b设置在容器16a、16b的上面,但是,不一定限于这一结构,也可以设置在容器16a、16b的侧面或跨越在侧面和上面。
另外,在本实施例中,是通过在容器16a、16b上设置贯通孔18进行导电层14a、14b与外部电极20a、20b的连接的,但是,不一定限于这种方法,也可以通过在容器16a、16b上设置切口等进行。
另外,当由于导电层14a、14b的存在而导致机-电变换元件15的压电基板(铌酸锂)12a、12b与容器(铌酸锂)16a、16b不能以足够的强度接合时,如果在接合面上形成氧化硅膜作为缓冲层,通过该缓冲层进行接合便可获得强的接合强度。
(第4实施例)
图21是表示本发明第4实施例的加速度传感器的分解斜视图。如图21所示,双压电晶片式的机-电变换元件21以将其两端支持的状态设置在由铌酸锂构成的容器27b上(双臂梁结构)。双压电晶片式的机-电变换元件21通过压电基板(铌酸锂)22a、22b直接接合而构成。同样由铌酸锂构成的容器27a与容器27b直接接合。这时,容器27a与容器27b的直接接合也可以通过由氧化硅薄膜等构成的缓冲层进行。另外,在容器27a、27b的外面,分别形成外部电极26a、26b(图中未示出26b),该外部电极26a、26b分别与机-电变换元件21的电极23a、23b电气连接。这样,便可将在机-电变换元件21上的电极23a、23b发生的电荷取出到外部。通过上述步骤,就构成了加速度传感器105。
本实施例的双臂梁结构的加速度传感器105也可以利用和上述第3实施例相同的方法制造。即,如图22所示,首先,在2块压电基板(铌酸锂)22a、22b上形成双臂梁部,通过将压电基板22a、22b直接接合,制作双压电晶片式的压电元件。其次,在双臂梁部上形成电极23a、23b,制作双压电晶片式的机-电变换元件21。然后,形成用于将外部电极与电极23a、23b连接的导电层24a、24b(图中未示出24b)。该双臂梁结构的机-电变换元件21和上述第3实施例相同,在基板上同时形成大量的元件,可以提高生产效率。使用和上述第3实施例相同的工序,将形成凹部和贯通孔的铌酸锂基板与形成机-电变换元件21的压电基板22a、22b直接接合,形成容器。最后,设置外部电极等,制作成加速度传感器。
使用双臂梁结构时,即使是相同长度、相同厚度的机-电变换元件,共振频率也比悬臂梁结构时高,所以,可以测量更高频率区域的加速度。
机-电变换元件21的长度、厚度和宽度考虑作为测量对象的加速度的频率范围进行决定。测量的加速度的频率越接近机-电变换元件21的共振频率,加速度传感器105的灵敏度越高。在测量频率范围内,为了使加速度传感器105的灵敏度与频率的关系不大,必须使共振频率远离测量频率范围。因此,例如可以将机-电变换元件21设计为共振频率是最高测量频率的2倍的频率。
如上所述,按照本实施例,由于不使用粘接剂等粘接层而通过将压电基板22a、22b牢固地直接接合形成机-电变换元件21,所以,可以实现无特性偏差和振动衰减等、具有高灵敏度的加速度传感器。另外,由于将机-电变换元件21与容器27a、27b直接接合,所以,机-电变换元件21的位置对准精度高,双臂梁部的长度和支持状态不会发生偏差。结果,可以实现稳定性高、特性偏差非常小、可以测量到高频范围的小型的加速度传感器。另外,由于通过将容器27a和容器27b直接接合,不使用粘接剂容器27a和容器27b便可牢固地接合,所以,接合面的耐热性高。结果,即使进行回流焊接等,也不会从接合部发生气体,容器27a和容器27b成为气密封闭的状态,所以,可以获得特性不恶化的可靠性高的加速度传感器。
在本实施例中,作为压电基板22a、22b的材料,是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用钽酸锂及石英。
另外,在本实施例中,作为容器27a、27b的材料,是使用铌酸锂,但是,不一定限于这种材料,例如,也可以使用钽酸锂、石英、硅、玻璃等材料。最好使用和构成机-电变换元件21的压电基板22a、22b相同的材料,最理想的是使用和构成机-电变换元件21的压电基板22a、22b的热膨胀系数接近的材料。
(第5实施例)
图23是本发明第5实施例的冲击检测装置的电路结构图。如图23所示,本冲击检测装置由加速度传感器40、将从加速度传感器40输出的信号变换和放大的放大电路41、将从放大电路41输出的信号与作为基准的信号进行比较的比较电路42、记录冲击的存储装置43、显示冲击的显示装置44、控制比较电路42和存储装置43及显示装置的控制电路45构成。作为控制电路45,也可以利用装上了该冲击检测装置的机器的控制装置的一部分。这里,作为加速度传感器40,使用上述第1实施例的加速度传感器(图6)。
图24是放大电路的结构。如图24所示,加速度传感器40与电阻R1并联连接到场效应晶体管(FET)的栅极,从加速度传感器40输出的信号输入场效应晶体管的栅极。该电路的频率特性的低频端的截止频率由电阻R1和加速度传感器40的电容量C1决定,可以表为fc=1/2πR1C1。因此,在低于fc的频率,输出降低。加速度传感器40的电容量C1离散大时,截止频率fc就产生偏差,从而可测量的最低频率就发生变化。在使用压电陶瓷的加速度传感器中,电容量的偏差约为20%,截止频率也有相同数量级的偏差。但是,在将本发明的压电单晶基板直接接合而制作的加速度传感器40中,由于电容量C1的偏差非常小,小于7%,所以,截止频率fc也稳定,即使对于低频的加速度,也可以获得稳定的输出。从加速度传感器40输出的信号由放大电路41进行变换和放大。从放大电路41输出的信号输入比较电路42。由比较电路42判断从放大电路41输出的信号大于还是小于作为基准的信号。
下面,说明例如当施加10G以上的冲击时识别冲击、记录冲击和显示冲击的情况。图25是将在上述第1实施例中所述的加速度传感器的输出用图24的电路测量时的输出电压与加速度的关系。如图25所示,施加10G的加速度时从与加速度传感器40连接的放大电路41输出的信号的大小为64mV。这时,将64mV作为基准信号从控制电路45输入比较电路42。由比较电路42将该基准信号与放大电路41的输出信号进行比较,从放大电路41输出的信号大时,就发生输出信号,并送回控制电路45。这样,便可使控制电路45识别出施加了比作为基准的10G大的冲击。控制电路45可以向存储装置43发出命令,使之存储已接受到比作为基准的10G大的冲击。这时,可以记录加速度的大小和接受加速度的时间、日期等。另外,控制电路45还向显示装置44发出命令,使之显示已接受到比作为基准的10G大的冲击和冲击的大小及时间、日期等,显示装置44就显示这些信息。另外,控制电路45还可以向装上了该冲击检测装置的整个机器发出命令,使之避免发生冲击引起的误动作和破坏。例如,当该冲击检测装置组装到硬盘内时,在检测到冲击的瞬间,便可发出命令中止从磁头向磁盘写入信息,使磁头退避到磁头与磁盘接触不到的位置。另外,当该冲击检测装置组装到手持电话机内时,还可以发出命令自我诊断有无故障。
在本实施例的冲击检测装置中,由于作为加速度传感器是使用上述第1实施例的加速度传感器(图6),所以,加速度传感器的灵敏度和电容量没有偏差。结果,可以实现加速度的测量精度高、可以使用比较电路相对于作为检测冲击时的基准的值进行正确的判断的冲击检测装置。另外,由于按上述方式构成冲击检测装置,所以,可以实现能够检测并记录冲击、使用控制电路进行判断并指示进行保护机器免受冲击的动作的冲击检测机器。
Claims (36)
1.一种加速度传感器,其特征在于:包括具有相对的2个主面的2个压电基板的上述主面之间直接接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体,上述2个压电基板的主面之间通过使上述2个压电基板的构成原子通过氧原子、羟基或氧原子和羟基相互结合而直接接合。
2.按权利要求1所述的加速度传感器,其特征在于:2个压电基板以极化轴的方向成为相互相反的方向进行接合。
3.按权利要求1所述的加速度传感器,其特征在于:2个压电基板通过缓冲层直接接合。
4.按权利要求1所述的加速度传感器,其特征在于:机-电变换元件的一端支持在支持体上。
5.按权利要求1所述的加速度传感器,其特征在于:机-电变换元件的两端支持在支持体上。
6.按权利要求1所述的加速度传感器,其特征在于:压电基板由晶体结构3m族的单晶压电材料构成,以上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面垂直于与Y轴的夹角为+129°-+152°的轴并且包含X轴,联接上述压电基板的重心和支持体的中心的连线垂直于X轴。
7.按权利要求1所述的加速度传感器,其特征在于:压电基板由晶体结构3m族的单晶压电材料构成,以上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面垂直于与Y轴的夹角为-26°~+26°的轴并且包含X轴,联结上述压电基板的重心和支持体的中心的连线垂直于X轴。
8.按权利要求1所述的加速度传感器,其特征在于:压电基板由晶体结构32族的单晶压电材料构成,以上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面垂直于X轴,联结上述压电基板的重心和支持部中心的连线与Z轴的夹角为+52°-+86°的角度。
9.按权利要求1所述的加速度传感器,其特征在于:压电基板由晶体结构32族的单晶压电材料构成,以上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面垂直于与X轴的夹角为-26°~+26°的轴并且包含Y轴,联结上述压电基板的重心和支持体的中心的连线平行于Y轴。
10.按权利要求1所述的加速度传感器,其特征在于:压电基板由晶体结构32族的单晶压电材料构成,以上述单晶压电材料的晶体轴为X轴、Y轴、Z轴时,上述压电基板的主面垂直于与X轴的夹角为+52°~+68°的轴并且包含Z轴,联结上述压电基板的重心和支持体的中心的连线垂直于Z轴。
11.根据权利要求1的加速度传感器,其特征在于:上述压电基板的构成原子与支持体的构成原子通过氧原子和/或羟基相互结合,由此使上述机-电变换元件与上述支持体直接接合。
12.按权利要求11所述的加速度传感器,其特征在于:构成机-电变换元件的压电基板和支持体通过缓冲层直接接合。
13.按权利要求11所述的加速度传感器,其特征在于:压电基板和支持体由同一种材料构成。
14.按权利要求11所述的加速度传感器,其特征在于:机-电变换元件的一端支持在支持体上。
15.按权利要求11所述的加速度传感器,其特征在于:机-电变换元件的两端支持在支持体上。
16.根据权利要求1的加速度传感器,其特征在于:还包括收容上述机-电变换元件的容器,上述容器的构成原子与上述支持体的构成原子通过氧原子、羟基或氧原子和羟基相互结合而直接接合,由此使上述支持体与上述容器直接接合。
17.按权利要求16所述的加速度传感器,其特征在于:容器和支持体通过缓冲层直接接合。
18.根据权利要求1的加速度传感器,其特征在于:包括收容上述机-电变换元件的容器,上述压电基板的构成原子和上述容器的构成原子通过氧原子、羧基或氧原子和羟基相互结合,使构成上述压电元件的上述压电基板与上述容器直接接合,支持上述机-电变换元件。
19.按权利要求18所述的加速度传感器,其特征在于:压电基板和容器通过缓冲层直接接合。
20.按权利要求18所述的加速度传感器,其特征在于:压电基板和容器由同一种材料构成。
21.根据权利要求1的加速度传感器,其特征在于:包括收容上述机-电变换元件的由至少两部分构成的容器,将通过亲水化处理的上述2个压电基板的主面结合后,通过热处理使构成上述容器的各部分之间直接接合。
22.按权利要求21所述的加速度传感器,其特征在于:构成容器的各部分之间通过缓冲层直接接合。
23.一种包括具有相对的2个主面的2个压电基板的上述主面之间接合而构成的压电元件、由在上述压电元件的相对的2个主面上形成的电极构成的机-电变换元件和支持上述机-电变换元件的支持体的加速度传感器的制造方法,其特征在于:将经过亲水化处理的上述2块压电基板的上述主面结合后,通过进行热处理使上述2个压电基板的上述主面之间直接接合而形成压电元件。
24.根据权利要求23的的加速度传感器的制造方法,其特征在于:将经过亲水化处理的支持体和压电基板接合后,通过进行热处理将上述支持体与上述压电基板直接接合,从而将上述支持体与构成上述压电元件的上述压电基板直接接合。
25.根据权利要求23的加速度传感器的制造方法,其特征在于:还包括收容上述机-电变换元件的容器,将经过亲水化处理的支持体和容器接合后,通过进行热处理将上述支持体与上述容器直接接合,使上述支持体与上述容器直接接合。
26.根据权利要求23的加速度传感器的制造方法,其特征在于:还包括收容上述机-电变换元件的容器,在将经过亲水化处理的压电基板和容器接合后,通过进行热处理将上述压电基板与上述容器直接接合,由此将构成上述压电元件的压电基板与上述容器直接接合。
27.根据权利要求23的制造方法,其特征在于:还包括收容上述机-电变换元件的至少由2个部分构成的容器,在将经过亲水化处理的容器的各部分之间接合后,通过进行热处理将上述容器的各部分之间直接接合,由此将上述容器的各部分之间直接接合。
28.根据权利要求23的加速度传感器的制造方法,其特征在于:还包括收容上述机-电变换元件的容器,所述方法包括将用模型形成多个悬臂梁部或双臂梁部的2块压电基板直接接合形成多个压电元件的工序、将在与上述压电元件对应的部位形成凹部的容器与上述压电基板直接接合的工序和分离为包含上述压电元件的各个加速度传感器的工序。
29.按权利要求28所述的加速度传感器的制造方法,其特征在于:在形成压电元件后,在上述压电元件的相对的主面上形成电极。
30.按权利要求28所述的加速度传感器的制造方法,其特征在于:在压电基板上形成电极后,用模型形成悬臂梁部或双臂梁部。
31.按权利要求29或30所述的加速度传感器的制造方法,其特征在于:在形成电极时,同时在压电基板上形成导电层。
32.根据权利要求23的加速度传感器的制造方法,其特征在于:还包括收容上述机-电变换元件的容器,所述方法包括在将2块压电基板直接接合后用模型形成多个悬臂梁部或双臂梁部从而形成多个压电元件的工序、将在与上述压电元件对应的部位形成凹部的容器与上述压电基板直接接合的工序和分离为包含上述压电元件的各个加速度传感器的工序。
33.按权利要求32所述的加速度传感器的制造方法,其特征在于:在形成压电元件后,在上述压电元件的相对的主面上形成电极。
34.按权利要求32所述的加速度传感器的制造方法,其特征在于:在压电基板上形成电极后,用模型形成悬臂梁部或双臂梁部。
35.按权利要求32或33所述的加速度传感器的制造方法,其特征在于:在形成电极时,同时在压电基板上形成导电层。
36.根据权利要求1的一种加速度传感器,其特征在于:还包括将从所述机-电变换元件输出的信号进行变换和放大的放大电路。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP26124095 | 1995-10-09 | ||
| JP261240/95 | 1995-10-09 | ||
| JP201616/96 | 1996-07-31 | ||
| JP20161696 | 1996-07-31 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1154478A CN1154478A (zh) | 1997-07-16 |
| CN1090324C true CN1090324C (zh) | 2002-09-04 |
Family
ID=26512891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN96122837A Expired - Fee Related CN1090324C (zh) | 1995-10-09 | 1996-10-09 | 加速度传感器及其制造方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US6098460A (zh) |
| EP (1) | EP0768532B1 (zh) |
| CN (1) | CN1090324C (zh) |
| DE (1) | DE69627603T2 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1918502B (zh) * | 2004-02-06 | 2010-10-06 | 欧洲光学系统公司 | 其中两个压电层由半刚性材料制成的中心芯分离的双压电晶片镜 |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6270202B1 (en) | 1997-04-24 | 2001-08-07 | Matsushita Electric Industrial Co., Ltd. | Liquid jetting apparatus having a piezoelectric drive element directly bonded to a casing |
| JPH116841A (ja) * | 1997-06-16 | 1999-01-12 | Matsushita Electric Ind Co Ltd | 加速度センサ及びその製造方法 |
| US6550116B2 (en) | 1997-07-11 | 2003-04-22 | Matsushita Electric Industrial Co., Ltd. | Method for manufacturing a bimorph piezoelectric device for acceleration sensor |
| JPH1130628A (ja) * | 1997-07-11 | 1999-02-02 | Matsushita Electric Ind Co Ltd | 加速度センサー用バイモルフ型圧電素子とその製造方法 |
| JP3335122B2 (ja) * | 1998-05-06 | 2002-10-15 | 松下電器産業株式会社 | 角速度センサ |
| US6382026B1 (en) * | 1998-05-19 | 2002-05-07 | Matsushita Electric Industrial Co., Ltd. | Acceleration sensor and acceleration apparatus using acceleration sensor |
| JP3339425B2 (ja) * | 1998-10-19 | 2002-10-28 | 株式会社村田製作所 | 加速度センサ及び加速度検出装置 |
| JP2000346865A (ja) * | 1999-03-26 | 2000-12-15 | Ngk Insulators Ltd | 加速度センサ素子の感度調整方法 |
| US6336366B1 (en) * | 1999-09-24 | 2002-01-08 | Ut-Battelle, Llc | Piezoelectrically tunable resonance frequency beam utilizing a stress-sensitive film |
| US6629462B2 (en) * | 2000-07-24 | 2003-10-07 | Matsushita Electric Industrial Co., Ltd. | Acceleration sensor, an acceleration detection apparatus, and a positioning device |
| US7005777B2 (en) * | 2001-01-10 | 2006-02-28 | Seagate Technology Llc | Tapered piezoelectric in-plane bimorph and method of fabricating |
| JP2002243754A (ja) * | 2001-02-15 | 2002-08-28 | Matsushita Electric Ind Co Ltd | 電子機器とそれが受けた衝撃を検出する衝撃検出方法 |
| JP3514240B2 (ja) * | 2001-02-19 | 2004-03-31 | 株式会社村田製作所 | 加速度センサ |
| DE10121732A1 (de) * | 2001-05-04 | 2002-11-07 | Leica Microsystems | Mikroskop und Verfahren zum Betreiben eines Mikroskops |
| US6777856B2 (en) * | 2001-08-02 | 2004-08-17 | Kistler Holding Ag | Crystal element for piezo sensors |
| EP1283552B1 (de) * | 2001-08-02 | 2009-01-07 | Kistler Holding AG | Kristallelement für Piezosensoren |
| TW546477B (en) * | 2001-08-09 | 2003-08-11 | Matsushita Electric Ind Co Ltd | Drop impact determination system and acceleration sensing element used in the drop impact determination system |
| US7275412B2 (en) * | 2001-08-09 | 2007-10-02 | Matsushita Electric Industrial Co., Ltd. | Drop shock measurement system and acceleration sensor element used in the same |
| JP3756109B2 (ja) * | 2001-11-28 | 2006-03-15 | 富士通メディアデバイス株式会社 | 磁気ヘッド支持機構及び磁気ヘッド位置決め制御機構 |
| JP4190208B2 (ja) * | 2002-05-21 | 2008-12-03 | 株式会社村田製作所 | 加速度センサ |
| JP4209144B2 (ja) * | 2002-06-21 | 2009-01-14 | パナソニック株式会社 | 圧電アクチュエータ、インクジェットヘッド及びインクジェット式記録装置 |
| CN100411216C (zh) * | 2003-12-31 | 2008-08-13 | 中国兵器工业集团第五三研究所 | 一种有机压电薄膜极化方法 |
| DE102004014282C5 (de) * | 2004-03-22 | 2008-06-12 | Db Netz Ag | Diagnose und Zustandsmonitoring im Überlaufbereich von Weichen, starren Herzstücken und Kreuzungen |
| JP2006116399A (ja) * | 2004-10-20 | 2006-05-11 | Citizen Electronics Co Ltd | 撓み振動型エキサイタ |
| US7219550B2 (en) * | 2005-02-17 | 2007-05-22 | Michael Ping Cheung Lau | Piezoelectric accelerometer |
| JP4556784B2 (ja) | 2005-06-27 | 2010-10-06 | 株式会社デンソー | 圧力センサ |
| AT502125B1 (de) * | 2006-10-09 | 2008-05-15 | Avl List Gmbh | Piezoelektrische sensoreinrichtung |
| JP2010521325A (ja) * | 2007-03-13 | 2010-06-24 | ナノインク インコーポレーティッド | ビューポートを用いたナノリソグラフィ |
| US8086330B1 (en) * | 2007-04-25 | 2011-12-27 | Apple Inc. | Accessing accelerometer data |
| DE202007014048U1 (de) | 2007-10-08 | 2007-12-13 | Nivag Handelsgesellschaft Mbh | Nothammer mit weiteren Funktionen als Hülle eines Mehrzweckwerkzeugs |
| AT504958B1 (de) * | 2008-05-29 | 2009-08-15 | Avl List Gmbh | Piezoelektrische sensoreinrichtung |
| EP2244489A1 (de) * | 2009-04-24 | 2010-10-27 | Bayer MaterialScience AG | Verfahren zur Herstellung eines elektromechanischen Wandlers |
| EP2267579B1 (en) | 2009-06-22 | 2013-08-21 | Research In Motion Limited | Portable electronic device and method of measuring drop impact at the portable electronic device |
| US8061182B2 (en) | 2009-06-22 | 2011-11-22 | Research In Motion Limited | Portable electronic device and method of measuring drop impact at the portable electronic device |
| US8176617B2 (en) * | 2010-03-31 | 2012-05-15 | Honeywell International Inc. | Methods for making a sensitive resonating beam accelerometer |
| EP2649459A4 (en) * | 2010-12-08 | 2014-07-02 | Microfine Materials Technologie Pte Ltd | HIGH-PERFORMANCE BENDING SPEEDOMETER |
| JP5811785B2 (ja) | 2011-11-08 | 2015-11-11 | セイコーエプソン株式会社 | センサー素子、力検出装置およびロボット |
| NO335565B1 (no) * | 2012-12-21 | 2014-12-29 | Cggveritas Services Norway As | Geofysisk akselerasjonssensor med justerbar støtbeskyttelse og fremgangsmåte |
| US9470593B2 (en) * | 2013-09-12 | 2016-10-18 | Honeywell International Inc. | Media isolated pressure sensor |
| US9422944B2 (en) * | 2014-08-15 | 2016-08-23 | Dell Products, Lp | Carbon fiber laminate piezoelectric cooler and method therefor |
| WO2016143183A1 (ja) * | 2015-03-12 | 2016-09-15 | 株式会社村田製作所 | 加速度検出装置及びその製造方法 |
| CN106092387B (zh) * | 2015-04-30 | 2019-11-22 | 意法半导体股份有限公司 | 用于检测诸如冲击、加速度、旋转力等平面内的力的集成压电传感器 |
| DE102015212669B4 (de) * | 2015-07-07 | 2018-05-03 | Infineon Technologies Ag | Kapazitive mikroelektromechanische Vorrichtung und Verfahren zum Ausbilden einer kapazitiven mikroelektromechanischen Vorrichtung |
| US10109322B1 (en) | 2017-06-12 | 2018-10-23 | Seagate Technology Llc | Anti-shock system for a data storage device |
| EP3649678B1 (en) * | 2017-07-05 | 2022-11-30 | Université Grenoble Alpes | Piezoelectric energy harvesting bending structure and the method of manufacturing thereof |
| CN108640078B (zh) * | 2018-04-19 | 2021-03-30 | 中芯集成电路(宁波)有限公司 | 一种压力传感器及其形成方法 |
| CN108775956A (zh) * | 2018-05-24 | 2018-11-09 | 北京科技大学 | 一种基于压电的无线振动悬臂梁传感器 |
| US20220005341A1 (en) * | 2018-11-07 | 2022-01-06 | World Wide Warranty Life Services Inc. | Method and system for detecting presence of a protective case on a portable electronic device during drop impact |
| JP6545918B1 (ja) * | 2019-05-22 | 2019-07-17 | Imv株式会社 | 加速度センサコアユニット、加速度センサを載置する基板のたわみを防止する方法 |
| CN110501521B (zh) * | 2019-08-12 | 2020-12-11 | 武汉大学 | 一种压电式加速度计 |
| WO2021072557A1 (en) | 2019-10-18 | 2021-04-22 | World Wide Warranty Life Services Inc. | Detecting the presence or absence of a protective case on an electronic device |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3631383A (en) * | 1969-07-25 | 1971-12-28 | Bendix Corp | Piezoelectric transducer configuration |
| US3735161A (en) * | 1971-12-23 | 1973-05-22 | Bell & Howell Co | Piezoelectric transducer |
| FR2557973A1 (fr) * | 1984-01-06 | 1985-07-12 | Rambaud Guy | Dispositif de signalisation de contraintes subies par des pieces ou ensemble de pieces mecaniques |
| EP0262637B1 (en) * | 1986-09-29 | 1995-03-22 | Mitsubishi Chemical Corporation | Piezoelectric actuator |
| JPH0623782B2 (ja) * | 1988-11-15 | 1994-03-30 | 株式会社日立製作所 | 静電容量式加速度センサ及び半導体圧力センサ |
| JPH02248086A (ja) * | 1989-03-22 | 1990-10-03 | Matsushita Electric Ind Co Ltd | 加速度センサ |
| JPH0392764A (ja) * | 1989-09-05 | 1991-04-17 | Fujikura Ltd | 圧電型加速度センサ |
| EP0427901B1 (en) * | 1989-11-14 | 1996-04-03 | Battelle Memorial Institute | Method of manufacturing a multilayer piezoelectric actuator stack |
| US5003824A (en) * | 1989-12-26 | 1991-04-02 | Matsushita Electric Industrial Co., Ltd. | Vibration/acceleration sensor |
| US5747857A (en) * | 1991-03-13 | 1998-05-05 | Matsushita Electric Industrial Co., Ltd. | Electronic components having high-frequency elements and methods of manufacture therefor |
| FR2685958B1 (fr) * | 1992-01-07 | 1995-06-30 | Befic | Appareil portatif et autonome pour la detection et l'enregistrement de phenomenes de courte duree se produisant aleatoirement. |
| JP3222220B2 (ja) * | 1992-10-19 | 2001-10-22 | 株式会社村田製作所 | チップ型圧電共振子の製造方法 |
| US5453652A (en) * | 1992-12-17 | 1995-09-26 | Matsushita Electric Industrial Co., Ltd. | Surface acoustic wave device with interdigital transducers formed on a holding substrate thereof and a method of producing the same |
| JP3136847B2 (ja) * | 1993-07-13 | 2001-02-19 | 株式会社村田製作所 | 加速度センサの製造方法 |
| DE69403252T2 (de) * | 1993-03-19 | 1997-09-25 | Murata Manufacturing Co | Beschleunigungsmessaufnehmer |
| JPH07193294A (ja) * | 1993-11-01 | 1995-07-28 | Matsushita Electric Ind Co Ltd | 電子部品およびその製造方法 |
| JP3094757B2 (ja) * | 1993-11-12 | 2000-10-03 | 株式会社村田製作所 | 加速度検出素子の製造方法 |
| US5539270A (en) * | 1993-11-19 | 1996-07-23 | Matsushita Electric Works, Ltd. | Acceleration detector |
| US5413955A (en) * | 1993-12-21 | 1995-05-09 | Delco Electronics Corporation | Method of bonding silicon wafers at temperatures below 500 degrees centigrade for sensor applications |
| US5369057A (en) * | 1993-12-21 | 1994-11-29 | Delco Electronics Corporation | Method of making and sealing a semiconductor device having an air path therethrough |
| JPH07202283A (ja) * | 1993-12-28 | 1995-08-04 | Tdk Corp | 圧電センサ及びその製造方法 |
| JPH07260819A (ja) * | 1994-03-22 | 1995-10-13 | Tokin Corp | 加速度センサ |
| JP3585310B2 (ja) * | 1996-02-20 | 2004-11-04 | 日本碍子株式会社 | マルチダイヤフラム構造体の製造法 |
| US6145385A (en) * | 1998-12-29 | 2000-11-14 | Lucent Technologies Inc. | Measurement of mechanical fastener clamping force |
-
1996
- 1996-10-08 DE DE69627603T patent/DE69627603T2/de not_active Expired - Fee Related
- 1996-10-08 US US08/727,302 patent/US6098460A/en not_active Expired - Fee Related
- 1996-10-08 EP EP96116104A patent/EP0768532B1/en not_active Expired - Lifetime
- 1996-10-09 CN CN96122837A patent/CN1090324C/zh not_active Expired - Fee Related
-
2000
- 2000-05-19 US US09/573,542 patent/US6615465B2/en not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1918502B (zh) * | 2004-02-06 | 2010-10-06 | 欧洲光学系统公司 | 其中两个压电层由半刚性材料制成的中心芯分离的双压电晶片镜 |
Also Published As
| Publication number | Publication date |
|---|---|
| US6098460A (en) | 2000-08-08 |
| DE69627603T2 (de) | 2003-12-18 |
| EP0768532A3 (en) | 1997-07-23 |
| EP0768532A2 (en) | 1997-04-16 |
| CN1154478A (zh) | 1997-07-16 |
| DE69627603D1 (de) | 2003-05-28 |
| US6615465B2 (en) | 2003-09-09 |
| US20020171328A1 (en) | 2002-11-21 |
| EP0768532B1 (en) | 2003-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1090324C (zh) | 加速度传感器及其制造方法 | |
| CN1157606C (zh) | 加速度传感器和加速度检测装置及定位装置 | |
| US9362483B2 (en) | Vibrator element having a suppressed vibration signal of leakage vibration | |
| CN1204545C (zh) | 头滑动器悬架 | |
| JP3929983B2 (ja) | 接合基板、弾性表面波素子および弾性表面波デバイス並びにその製造方法 | |
| CN1576785A (zh) | 压电振动片及其支撑结构、压电振子及振动型压电陀螺仪 | |
| US9696156B2 (en) | Vibrating element, sensor unit, electronic apparatus, and method for manufacturing vibrating element | |
| CN1612472A (zh) | 压电振动片、压电器件及制造方法、便携电话、电子设备 | |
| US9093638B2 (en) | Vibrating element, sensor unit and electronic apparatus | |
| JP2010187373A (ja) | 複合基板及びそれを用いた弾性波デバイス | |
| CN1921299A (zh) | 压电振动器及其制造方法、振荡器、电子部件及其制造方法以及电子设备 | |
| KR101661361B1 (ko) | 복합 기판, 및 그것을 이용한 탄성 표면파 필터와 탄성 표면파 공진기 | |
| CN1537231A (zh) | 加速度传感器 | |
| WO2011043219A1 (ja) | 圧電式加速度センサ | |
| CN1746622A (zh) | 用于支撑振动器的结构以及用于测量物理量的装置 | |
| CN1822497A (zh) | 压电振动器、表面安装型压电振动器、振荡器、电子装置以及电波钟 | |
| JP5987426B2 (ja) | 振動片、振動片の製造方法、センサーユニット、電子機器 | |
| CN1925320A (zh) | 表面安装式压电振动器及其制造方法、振荡器、电子设备以及无线电波时计 | |
| US8453503B2 (en) | Vibrating reed, vibrator, physical quantity sensor, and electronic apparatus | |
| US20210063155A1 (en) | Vibrator device | |
| CN1892231A (zh) | 加速度传感器及使用该加速度传感器的磁盘装置 | |
| CN1538620A (zh) | 压电谐振器和压电谐振器部件 | |
| JP2012134824A (ja) | 振動片、振動子、発振器および電子機器 | |
| JP5970699B2 (ja) | センサーユニット、電子機器 | |
| JPH1096742A (ja) | 加速度センサ及びその製造方法、並びに加速度センサを利用した衝撃検知機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |