CN107613831B - 清洁机器人 - Google Patents
清洁机器人 Download PDFInfo
- Publication number
- CN107613831B CN107613831B CN201680026183.1A CN201680026183A CN107613831B CN 107613831 B CN107613831 B CN 107613831B CN 201680026183 A CN201680026183 A CN 201680026183A CN 107613831 B CN107613831 B CN 107613831B
- Authority
- CN
- China
- Prior art keywords
- front wheel
- water
- cleaning robot
- cleaner body
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 144
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 133
- 239000008400 supply water Substances 0.000 claims description 7
- 230000000149 penetrating effect Effects 0.000 claims description 2
- 230000033001 locomotion Effects 0.000 description 12
- 238000005406 washing Methods 0.000 description 11
- 230000001133 acceleration Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 8
- 239000004744 fabric Substances 0.000 description 7
- 230000001965 increasing effect Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 239000000126 substance Substances 0.000 description 4
- 229920001410 Microfiber Polymers 0.000 description 3
- 239000003599 detergent Substances 0.000 description 3
- 239000000428 dust Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 239000003658 microfiber Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000004308 accommodation Effects 0.000 description 2
- 239000000356 contaminant Substances 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000003749 cleanliness Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000011010 flushing procedure Methods 0.000 description 1
- 239000011796 hollow space material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 238000005201 scrubbing Methods 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/29—Floor-scrubbing machines characterised by means for taking-up dirty liquid
- A47L11/292—Floor-scrubbing machines characterised by means for taking-up dirty liquid having rotary tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4016—Contaminants collecting devices, i.e. hoppers, tanks or the like specially adapted for collecting fluids
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4044—Vacuuming or pick-up tools; Squeegees
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4063—Driving means; Transmission means therefor
- A47L11/4066—Propulsion of the whole machine
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4083—Liquid supply reservoirs; Preparation of the agents, e.g. mixing devices
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/408—Means for supplying cleaning or surface treating agents
- A47L11/4088—Supply pumps; Spraying devices; Supply conduits
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
Landscapes
- Electric Vacuum Cleaner (AREA)
- Electric Suction Cleaners (AREA)
Abstract
本申请公开了一种清洁器,其包括清洁器本体、能旋转地设置在清洁器本体的前部中的前轮、能旋转地设置在清洁器本体的后部中的后轮、附接到前轮的外周面并构造成与清洁目标表面接触的第一构件、附接到后轮的外周面并构造成与清洁目标表面接触的第二构件、使前轮旋转的前部电机、使后轮旋转的后部电机以及驱动前部电机和后部电机的控制器,其中控制器控制前部电机和后部电机,以在执行清洁时使它们沿相反方向旋转。
Description
技术领域
本公开的实施例涉及一种清洁机器人,更特别地涉及一种能够用水清洁地板的清洁机器人。
背景技术
传统清洁机器人是一种通过蓄电池运转并构造为能够根据微型计算机基于传感器信息和程序逻辑控制清洁系统所实施的指令而自动移动的机构。
此外,传统清洁机器人通常被构造为通过使用风扇抽吸而沿着一路径吸入散布在机器人下方的地板上的粉尘,并且带着附接到其后部的拖把垫移动,以便在之后局部地除去没有被吸入的细微粉尘污染物和地板上的污渍。拖把垫通常由微纤维或织物制成。
然而,这样的传统清洁机器人不能将水注入拖把垫。如果使用具有微纤维或织物拖把垫的传统清洁机器人,则难以得到类似湿布拖把的功能。
当传统清洁机器人推动拖把垫而移动时,没有足够的摩擦力被施加到拖把垫,因而可能产生清洁效果不佳这样的缺陷。
发明内容
【技术问题】
因此,提供本发明来解决上述和其它问题。本公开的实施例提供一种能够用水清洁地板的清洁机器人。
本公开的实施例还提供一种能够从地板去除清洁以后所用过的水的清洁机器人。
本公开的实施例还提供一种构造为在清洁过程中用水增加摩擦力以提升清洁效果的清洁机器人。
【技术解决方案】
为了实现这些目的和其它优点并根据实施例的目的,如本文呈现并广泛描述的,滚筒型或筒型拖把布或拖把刷被设置在清洁器本体的底面中。随着滚动运动和滑动移动通过拖把布或拖布刷的旋转数以及与地板的摩擦力而一起产生,用于去除地板污染物的清洁器本体的移动和清扫(摩擦拖洗)被同时执行。换言之,根据本公开的清洁机器人具有用于移动清洁器本体的轮。具有移动清洁器本体的功能的轮还具有清洁地板的功能。
清洁机器人的重量被传递至轮,而且与地板接触并旋转的轮增加了与地板的摩擦。因此,该清洁机器人可以在相同的操作条件下具有更高的清洁性能。
根据本公开的清洁机器人包括多个前轮和一个后轮。前轮具有使用供水系统的湿式清洁功能并产生沿所需方向行进的驱动力。在向前移动的情况下,后轮跟随并经过执行湿式清洁的区域。后轮由具有高含水量和良好拖洗性能的织物制成并吸收由前轮散布的水。
后轮沿着与前轮的旋转方向相反的方向旋转并使动力平衡在恰当的位置。沿相反方向旋转的前轮和后轮同时处于滑动的状态。此外,通过拖拽力的差异产生有助于清洁器本体的行进的某一运动,并且通过前轮和后轮的旋转数和摩擦力之间的差异产生拖拽力的差异。
在本公开的清洁机器人中,保持在水箱中的水被引导到前轮并被供应到前轮的中心。此时,水流向高速旋转的前轮并通过前轮的离心力旋转而注入前轮的内表面。因此,水经由出口孔被排出并到达拖把垫/拖把刷织物的外表面,以便保持湿式清洁的注入量/含水量。
喷嘴可以被设置在前轮的旋转轴线中,并且即使在前轮旋转时也保持稳定连接。此外,从喷嘴注入的水不会集中在任一前轮中,而是通过离心力均匀地分配到前轮的内表面。
前轮可以使用减速器将电机提供的旋转力变为适合清洁或行进的用于驱动的扭矩(或旋转数)。
没有水被供应到后轮且后轮能够去除前轮的湿式清洁之后留在地板上的水。此外,由于旋转摩擦,因此预期会有抛光效果。
已完成进行清洁的行进的清洁机器人可以执行作为有助于容易地清洗附接到前轮和后轮的外周面的第一构件和第二构件的装置的功能。此时,叶片被设置在容置凹部中,该容置凹部形成于壳体中以部分地容置前轮和后轮,并且叶片被构造成与第一构件和第二构件的外周面接触。
一旦清洁器本体被放置在壳体上,则混合地溶解有清洁剂的洗涤用水被保持在容置凹部中,并前轮和后轮被旋转以进行清洗。
一旦清洁器本体被放置在壳体上,则没有清洁剂的水被保持在容置凹部中,并前轮和后轮被旋转以进行冲洗。
一旦清洁器本体被放置在壳体上,则没有水被留存而使容置凹部变空,接着前轮和后轮被旋转以将其拧干。
清洁机器人的前轮和后轮根据摩擦力变化的不同条件而持续执行滚动运动和滑动运动。为了控制清洁器本体的运动,可以根据加速度和速度的变化来调节和补偿电机的输出,并且可以控制电机的驱动。
平面运动根据前束角(toe angle)(进/出)所产生的进给力的合力和轮的前后移动所产生的合力以及从清洁器本体合力的中心的扭矩合力来确定。控制器可以基于相应变化所产生的加速度和速度来计算电机的RPM,并根据所计算的RPM控制电机的输出。
本公开的实施例可以基于空间中的相对距离来定位清洁机器人,该相对距离由实施为产生特定无线电波信号(例如,UWB、BLE等)的三个或更多锚点或标志感测,此时,控制器可以根据信号接收单元所接收的信号来进行当前位置信息的输入时间与前一位置信息的输入时间之间的比较,并基于该比较操作的结果来计算速度信息。然后,控制器可以基于位置信息来计算相对于目标轨迹的剩余距离和位置与当前位置的误差,并通过控制电机的旋转来评估目标路径。
本公开的实施例可以提供一种清洁机器人,其包括:清洁器本体;前轮,能旋转地设置在清洁器本体的前部中;后轮,能旋转地设置在清洁器本体的后部中;第一构件,附接到前轮的外周面并构造成与清洁目标表面接触;第二构件,附接到后轮的外周面并构造成与清洁目标表面接触;水箱,向前轮供应水;以及供水管,将水从水箱引导到前轮。
前轮可以包括:中空柱形壳体;以及多个出口孔,贯穿柱形壳体,其中该中空柱形壳体与供水管连通,水通过前轮旋转时产生的离心力经由出口孔被供应到第一构件。换言之,通过使用前轮的旋转这一基本功能以将水分配到前轮,没有其它附加部件必须被设置在前轮中。
清洁机器人通常被构造为清洁平面地板。当水从供水管被供应到中空柱形壳体时,水被收集在柱形壳体的下部中。当前轮以这样的状态旋转时,水可以通过离心力被均匀地分配到前轮的内表面并接着在穿过出口孔之后被引导到第一构件。
突出到柱形壳体的内部空间的喷嘴可以沿着柱形壳体的旋转轴线设置。供水管可以将水供应到喷嘴。喷嘴向中空柱形壳体的内部空间突出,使水能够沿着前轮的旋转轴线被供应到前轮的整个部分。泵可以被设置在供水管中且泵可以使水经由供水管供应到前轮。
前轮可以包括相对于清洁器本体的中心对称设置在清洁器本体的两侧的第一前轮和第二前轮。供水管可以包括:进水管,将水从水箱引导到泵;以及第一出水管和第二出水管,将从泵供应的水分流到第一前轮和第二前轮。第一出水管和第二出水管被设置在第一前轮和第二前轮面向彼此的部分中,以防止当水被供应到第一前轮和第二前轮时有作用力被施加到清洁机器人的一侧。
泵被构造为在前轮旋转时将水供应到前轮,以防止水聚集在前轮的下部中。第一构件具有比第二构件低的含水量百分比,使得浸入第一构件中的水可以浸湿清洁器目标表面,而第二构件可以吸收清洁目标表面上残留的水。
前轮的水平宽度比后轮的水平宽度窄。后轮可以跟随在清洁目标表面上行进的前轮的轨迹并完成清洁。
从上方观察,前轮和水箱可以相互重叠。
前轮可以具有相对于清洁器本体的中心对称设置在清洁器本体的两侧的第一前轮和第二前轮。第一前部电机还可以被设置成驱动第一前轮,而第二前部电机还可以被设置成驱动第二前轮。通过独立且单独地被驱动以控制清洁机器人的行进,第一前部电机、第二前部电机和后部电机可以控制清洁机器人的行进。第一前部电机、第二前部电机和后部电机被独立且单独地驱动,进而可以相应地增强清洁机器人的清洁性能。
第一前轮和第二前轮可以被设置成面向彼此,且第一前轮的旋转轴线与第二前轮的旋转轴线之间呈180度的向前角度。或者,第一前轮和第二前轮可以被设置成面向彼此,且第一前轮的旋转轴线与第二前轮的旋转轴线之间呈180度的向后角度。
本公开的实施例还可以包括放置有清洁器本体的壳体。该壳体可以包括联接在前轮与后轮之间以支撑清洁器本体的支撑部。用户可以将清洁器本体放在壳体上。
洗涤用水被保持在壳体中且第一构件和第二构件被洗涤用水浸湿,使得对第一构件和第二构件的洗涤过程可以被执行。
叶片可以被设置在壳体中以与第一构件或第二构件接触。当前轮和后轮旋转时,粘附到第一构件和第二构件的异物可以被除去。
可以设置一对叶片,该对叶片接触第一构件或第二构件的两侧。
电池还可以被设置在清洁器本体中。从顶部观察,电池可以与水箱重叠,前轮和后轮的负载可以被均匀地分配。
本公开的实施例可以提供一种清洁器,其包括:清洁器本体;前轮,能旋转地设置在清洁器本体的前部中;后轮,能旋转地设置在清洁器本体的后部中;第一构件,附接到前轮的外周面并构造成与清洁目标表面接触;第二构件,附接到后轮的外周面并构造成与清洁目标表面接触;前部电机,旋转前轮;后部电机,旋转后轮;以及控制器,驱动前部电机和后部电机,其中控制器控制前部电机和后部电机以在执行清洁时使它们沿相反的方向旋转。前部电机和后部电机沿相反的方向旋转并且使前轮和后轮中的任一个进行滑动。
换言之,通过前轮的旋转而移动的清洁器本体的行进方向不同于通过后轮的旋转而移动的清洁器本体的行进方向。滑动出现在前轮或后轮中并且增加了摩擦力。因此,第一构件和第二构件施加到清洁目标表面的力变得更强,并且可以使用相对更强的力来清洁该清洁目标表面。相较于推动附接到清洁器本体的布料并拖洗地板,清洁机器人可以执行更好的清洁。
控制器可以驱动前部电机和后部电机,并控制后部电机以具有比前部电机少的旋转数。清洁器本体可以沿与后部电机的旋转方向相反的方向移动。后部电机产生滑动并有助于第一构件和第二构件用更强的力进行擦洗。
前轮包括设置在清洁器本体的两侧的第一前轮和第二前轮,且呈相对于清洁器本体的中心对称的状态。前部电机可以包括:第一前部电机,旋转第一前轮;以及第二前部电机,旋转第二前轮。控制器可以沿与后部电机的旋转方向相反的方向来旋转第一前部电机和第二前部电机中的至少一个电机。
后部电机可以以预设的旋转数旋转,该预设的旋转数低于第一前部电机和第二前部电机被旋转的两个旋转数中的较高一个旋转数。后部电机可以执行增加摩擦的功能,而不是使清洁器本体行进的功能。
清洁器还可以包括:加速度传感单元,感测清洁器本体的加速度;速度传感单元,感测清洁器本体的速度,其中控制器基于加速度传感单元和速度传感单元所感测的信息补偿电机的输出。
清洁器还可以包括接收从外部设备传输的无线电波的信号接收单元,其中控制器基于信号接收单元所接收的信号来定位清洁器本体。信号接收单元可以接收从设置在不同位置的传输单元传输的无线电波。
前轮和后轮沿相反方向旋转并且产生滑动。因此,使用前轮或后轮的扭矩或旋转方向确定清洁器本体的定位或移动时必然会出现误差。换言之,即使在使用安装在电机中的编码器测量扭矩时,也无法识别轮的滑动。因此,优选地是使用外部传输单元而非传统编码器来确定清洁机器人的定位或移动方向。
【有益效果】
这些实施例具有如下有益效果。清洁机器人使用水执行湿式清洁,并且粘在地板上的异物可以被拖洗或去除。
而且,清洁机器人可以增加与地板的摩擦力,进而可能增强湿式清洁的清洁度。换言之,湿润的构件被附接到旋转轮,并使该轮旋转。因此,用于湿式清洁的构件并非仅仅经过地板,而是可以产生手动拖洗和擦洗的效果。
此外,保持水的水箱可以与拖洗地板的构件重叠,且水箱的负载被施加到构件以在执行湿式清洁时增加摩擦力。因此,湿式清洁的性能可以被提升。
在执行对地板的湿式清洁之后,可以去除地板残留的水分或水并可以防止水渍。在浸湿的构件执行湿式清洁之后,干燥的构件执行对地板的清洁并执行对同一地板或清洁目标表面的双重清洁。
通过使用由轮的旋转产生的离心力,水可以被均匀地分配到对地板进行湿式清洁的构件并且湿润的构件的含水量百分比可以被适当地调节。
清洁机器人通过使用定位清洁器本体的外部信号可以获得定位清洁器本体的准确信息。
清洁机器人可以用水来除去粘附到其上的异物。
附图说明
图1是示出本公开的一个实施例的立体图;
图2是示出图1的下部区域的视图;
图3是图1的侧向剖视图;
图4是示出图1的关键部件的视图;
图5是示出前轮的视图;
图6是本公开的不同示例的概念视图;
图7是示出本公开的实施例的控制框图;
图8和图9是示出供本公开的实施例被稳定地放置在其中的壳体的视图;以及
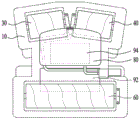
图10是示出本公开的另一实施例的视图。
具体实施方式
参考附图,将详细描述根据本公开的一个实施例的本公开的示例性实施例。
不管附图标记如何,相同或等效部件可以设有相同的附图标记并将不再重复对这些部件的描述。为了参考附图简要描述,附图中所示的元件的尺寸和轮廓可以被放大或减小,并且应该理解的是,附图并不限制本文所述的实施例。
图1是示出本公开的一个实施例的立体图,以及图2是示出图1的下部区域的视图。图3是图1的侧向剖视图,以及图4是示出图1的关键部件的视图。图5是示出前轮的视图。
参考图1至图5,根据本公开的一个实施例的清洁机器人包括:清洁器本体10,限定清洁机器人的外部设计;前轮20,能旋转地设置在清洁器本体10的前部中;后轮60,能旋转地设置在清洁器本体10的后部中;第一构件22,附接到前轮20的外周面以与清洁目标表面接触;第二构件62,附接到后轮60的外周面以与清洁目标表面接触;以及水箱80,用以向前轮20供应水。
第一构件22和第二构件62被构造成在与清洁目标表面接触时从清洁目标表面(例如,地板)分离粉尘和异物。
在与清洁目标表面接触时,第一构件22和第二构件62分别与前轮20和后轮60一起旋转。相较于传统清洁机器人沿着清洁器本体10的移动清扫地板的清洁角度,该清洁机器人能够将更高的摩擦力施加到清洁目标表面上且具有更强的清洁效果。
如图1所示,水箱80可以设置在清洁器本体10的中心附近或者设置成相对于清洁器本体10的中心来说更靠近前轮20一点。
如图2所示,前轮20包括相对于清洁器本体10的中心对称设置在两侧的第一前轮30和第二前轮40。换言之,前轮200由两个轮、而不是一个轮构成。第一前轮30和第二前轮40被设置为面向彼此。
作为一个轮的后轮60可以被设置在前轮20的后方。在前轮20包括第一前轮30和第二前轮40的情况下,第一构件22没有被设置在第一前轮20与第二前轮30之间,使得可能存在某一空间没有被第一构件22清洁到。但是,后轮60被构造为一个轮且第二构件62与后轮可旋转地经过的所有区域接触,以执行对清洁目标表面的清洁。
参考图4,所示实施例可以包括用以将水引导到前轮20的供水管,将水从水箱80引导到前轮20。泵90被设置在供水管中,以产生使保持在水箱80中的水移动到前轮20的压力。
供水管包括:进水管94,用以将水从水箱80引导到泵90;传输管97,将水从泵90传输到第一前轮30和第二前轮40的分流部;以及第一出水管98和第二出水管99,分流到第一前轮30和第二前轮40。
从水箱80流出的水沿着进水管94被引导到泵90,并在穿过泵90之后流到传输管97。因此,水从传输管97被分流到第一出水管98和第二出水管99,然后分别被供应到第一前轮30和第二前轮40。
第一出水管98和第二出水管99关于清洁器本体10的中心对称设置,以使因流到第一前轮30和第二前轮40的水的流动而可能施加到清洁器本体10一侧的力被阻止。因此,能够防止水流产生的噪音或振动并且进而能够保证行驶稳定性。
第一出水管98和第二出水管99被相应地设置在第一前轮30面向第二前轮40的部分中,使得第一出水管98和第二出水管99可以分别将水引导到第一前轮30和第二前轮40。从清洁器本体10向下看,前轮20和水箱80相互重叠。为了保持水,水箱80是比清洁机器人的其它部件具有相对更多负载的部件。当水箱80与前轮20重叠时,水箱80的负载可能大多数集中在前轮20上,前轮20的摩擦力得以增加。当与清洁目标表面接触的湿润的第一构件22执行清洁时,第一构件22相对于清洁目标表面的摩擦力增加且清洁效果能够被提升。
前轮20包括:中空柱形壳体31;以及多个出口孔34,贯穿柱形壳体31。中空空间33与供水管连通,使得一旦前轮20开始旋转,则将水经由出口孔34供应到第一构件22。
喷嘴36还可以沿柱形壳体31的旋转轴线被设置并突出到柱形壳体31内。供水管被构造成将水供应到喷嘴36,并且相应数量的喷嘴分别被设置在第一前轮30和第二前轮40中。喷嘴36被连接到第一出水管98和第二出水管99而将水引导到第一前轮30和第二前轮40。
第一前轮30和第二前轮40形成相同的结构并对称地被定位在不同位置中。
同时,在前轮20旋转时运转泵90,将水供应到前轮20。当前轮20开始旋转时,前轮20中产生离心力并使水均匀地分配在前轮20中。
齿轮箱24可以被设置在第一前轮30中的喷嘴36的相对部分中,并将由电机产生的旋转力传输到第一前轮30。如图5所示,喷嘴36被设置在第一前轮30的左边部分中,而齿轮箱24被设置在第一前轮30的右边部分中。在这种情况下,喷嘴36和齿轮箱24均被连接到第一前轮30的轴。
齿轮箱24改变旋转数或电机中产生的力,并且将改变的旋转数或力传输到第一前轮30。
设置在柱形壳体31中的出口孔34被均匀地分配在柱形壳体31中。当从喷嘴36注入的水被均匀地分配到柱形壳体31时,出口孔34提供的路径用以将水供应到第一构件22。
水穿过出口孔34被供应到第一构件22,且第一构件22与清洁目标表面接触而用水执行清洁。
出口孔34在柱形壳体31中形成为多条线,并且这些线以预设间隔设置。
第一构件22具有比第二构件62低的含水量百分比。
第一构件22装有水并在含有水的状态下执行对清洁目标表面的清洁。第二构件62能够在移动通过第一构件22刚刚经过的区域时去除保留在清洁目标表面上的水。换言之,第二构件62包括的材料能够从清洁目标表面吸收第一构件所使用的水并且不会在清洁目标表面上留下水渍。
特别地,第一构件22可以由具有相对较大的孔隙度的某种材料(例如,清洗海绵)制成,而第二构件62可以由具有相对较小的孔隙度的某种材料(例如,微纤维)制成。第一构件22和第二构件62具有不同的孔隙度。即使前轮20和后轮60以相同的旋转数旋转,但前轮20施加的摩擦力可以与后轮60施加到相同的清洁目标表面的摩擦力不同。在第一构件22和第二构件62清洁相同区域的情况下,多种摩擦力可以提供清洁多样性,进而能够增强清洁效果。
图6是本公开的不同示例的概念性视图。
正如图6a所示的本公开的一个示例,第一前轮30和第二前轮40可以被设置成面向彼此,且第一前轮30的旋转轴线与第二前轮40的旋转轴线之间向前呈180度的角度。
在这种情况下,包括第一前轮30和第二前轮40的前轮20的水平宽度(I1)小于后轮60的水平宽度(I2),使后轮60可以经过前轮已经经过的区域。
随着前轮使用湿润的第一构件22执行清洁,水很可能留在由第一构件22清洁的清洁目标表面上。第二构件62吸收剩余的水并完成清洁。
正如图6b所示的本公开的另一示例,第一前轮30和第二前轮40面向彼此,且第一前轮30的旋转轴线与第二前轮40的轴线之间向后呈190度或更少的角度。
即使在这种情况下,包括第一前轮30和第二前轮40的前轮20的水平宽度(I1)小于后轮60的水平宽度(I2)。
如图6a和图6b所示,当第一前轮30和第二前轮40相对于前表面倾斜时,能够有助于清洁机器人为改变清洁器本体10的方向的驱动。
正如图6c所示的本公开的另一示例,第一前轮30的旋转轴线与第二前轮40的旋转轴线被设置在相同的延长线上。包括第一前轮30和第二前轮40的前轮20的水平宽度(I1)小于后轮60的水平宽度(I2)。图6c所示的清洁机器人的旋转驱动通过区分第一前轮30的旋转数与第二前轮40的旋转数来执行。
图7是示出本公开的实施例的控制框图。
参考图7,本公开的实施例包括:第一前部电机38,驱动第一前轮30;第二前部电机48,驱动第二前轮40;以及后部电机68,驱动后轮60。
换言之,两个前轮20和一个后轮60分别通过不同的电机驱动,使两个前轮20和一个后轮60相互不同并被独立地控制。
所示实施例可以包括用以控制第一前部电机38、第二前部电机48和后部电机68的控制器200。
所示实施例还可以包括感测清洁器本体10的加速度的加速度传感单元210、以及感测清洁器本体10的速度的速度传感单元220。控制器200能够通过基于加速度传感单元210和速度传感单元220所感测的信息来补偿电机的输出来控制电机。
所示实施例还可以包括接收从外部设备传输的电磁波信号的接收单元230。控制器200可以基于信号接收单元230所接收的信号来定位清洁器本体10。同时,外部信标(external beacon)能够传输可由信号接收单元230接收的无线电波。
多个信号导向装置被设置在不同位置,以使信号接收单元230能够接收从设置在不同位置中的信号导向装置的发射机传输的无线电波。信号接收单元230比较从发射机接收到的信号的强度和方向以及在信号被彼此接收时的时间,还有比较在前一位置接收的信息与在当前位置接收的信息,使其能够根据比较结果计算出定位或方向。
控制器200控制前部电机和后部电机68,使它们在执行清洁时沿相反方向旋转。在前部电机包括第一前部电机38和第二前部电机48的情况下,控制器可以控制第一前部电机38和第二前部电机48的其中一个或多个电机以沿着与后部电机69的旋转方向相反的方向旋转。
当前部电机和后部电机沿相反的方向旋转时,例如当前部电机沿逆时针方向而后部电机68沿顺时针方向旋转时(如图3所示),前轮20沿逆时针方向旋转而后轮60沿顺时针方向旋转。
安装在一个清洁器本体10的不同位置中的两个轮沿相反的方向旋转并且在一个或多个轮中发生滑动。当逆着清洁器本体10的行驶方向施加力时,这种滑动甚至会发生在不仅仅是轮静止不动的状态下,以增加清洁机器人施加到清洁目标表面的摩擦力。
因此,第一构件22和第二构件62施加到清洁目标表面的摩擦力被增加,并且清洁机器人能够用更强的力来清洁清洁目标表面,仅为了提升清洁性能。
通过调节前部电机和后部电机的旋转数,控制器200可以控制清洁器本体10而使其甚至在前轮20和后轮60沿相反的方向旋转时不被移动。在这种情况下,可以对与清洁器本体10的第一构件22和第二构件62接触的当前区域执行深层清洁。
如上所述,滑动发生在所示实施例的轮中。在使用感测电机的旋转数的编码器的情况下,感测清洁机器人的定位和方向不可避免地出现大的误差。因此,所示实施例包括设置在清洁机器人外的用以生成信号的传输单元,以及从外部传输单元接收信号的信号接收单元,仅基于所接收的信号定位清洁机器人。
可以通过使用编码器来控制和补偿电机的旋转数。编码器不能提供能用于确定清洁机器人的定位的可靠信息。
前轮20包括两个轮而后轮60包括一个轮,使清洁机器人能够通过前轮20移动。在这种情况下,控制器200可以驱动前部电机和后部电机68,以使后部电机68的旋转小于前部电机的旋转。
如果前部电机的旋转数高于后部电机68的旋转数,施加到前轮20的力对于前轮20来说变得足够强,以趋于使清洁器本体移动。后部电机68执行产生滑动的功能。如果后部电机的旋转数较高,则滑动的程度变得更大。如果后部电机的旋转数较低,则滑动的程度变得更小。因此,清洁器本体10可以沿与后部电机的旋转方向相反的方向移动。
图8和图9是示出供本公开的实施例稳定地放置在其中的壳体的视图。
参考图8和图9,清洁机器人还可以包括壳体,清洁器本体10位于壳体上。壳体100包括连接在前轮20与后轮60之间以支撑清洁器本体10的支撑单元110。
壳体100位于清洁器本体10下方,而清洁器本体10被放置在壳体100上。
支撑单元110被设置为高于壳体100的底面,并插入式地安装在前轮20与后轮60之间而被连接到清洁器本体10。
洗涤用水被保持在壳体100中,而第一构件22和第二构件62被适当地浸湿。
而且,叶片106可以被设置在壳体100中以与第一构件22或第二构件62接触。叶片106可以被设置在第一构件22的两侧及第二构件62的两侧,以当第一构件22和第二构件62旋转时与第一构件22和第二构件62接触。当第一构件22和第二构件62开始旋转时,叶片106与第一构件22和第二构件62接触,然后分离粘附到第一构件22和第二构件62的异物。
在清洁器本体10被放置在壳体100上的情况下,洗涤用水可以被保持在壳体100中,并且前轮20和后轮60带着保持在壳体100中的洗涤用水而旋转。接着,洗涤用水被吸收到前轮20和后轮60且相对叶片106产生摩擦而能够清洗第一构件22和第二构件62(清洗过程)。
在清洁器本体10被放置在壳体100上的情况下,不含清洁剂的水可以被保持在壳体100中。当前轮20和后轮60旋转时,保持在壳体中的水被吸收到前轮20和后轮60中且抵靠叶片106产生摩擦,使第一构件22和第二构件62能够被冲洗(冲洗过程)。
除清洗过程和冲洗过程之外,在清洁器本体10被放置在壳体100上时壳体100中没有保持任何物质(空置状态)。当前轮20和后轮60以空置状态旋转时,第一构件22和第二构件62中包含的水可以通过离心力分离。换言之,在清洁器本体10被放置在壳体100上时,第一构件22和第二构件62能够被拧干(拧干过程)。
图10是示出本公开的另一实施例的视图。
参考图10,第一前轮30和第二前轮40被设置在清洁器本体10内的上部。水箱80与第一前轮30和第二前轮40部分重叠。
设置电池94并且将从外部供电电源供应的电力存储在电池94中,然后将电力供应到电机。电池94可以被设置成与水箱80重叠。
电路板92被安装在水箱80下方且后轮60被设置在电路板92下方。
相较于其他部件,电池94和水箱80在清洁机器人中很重。因此,电池94和水箱80被设置成靠近清洁器本体10的中心且处于相互重叠的状态,以使电池94的负载不集中在前轮20和后轮60中的任意一个轮上。因此,前轮20和后轮60的摩擦可以被均匀地增加,并且施加到第一构件22和第二构件62而使其与地板接触的力可以被均匀地增加。
由于当前特征可以在没有背离其特性的情况下以多种形式呈现,因此应该理解的是,上述实施例并不由上述说明的任何细节限制,除非另行说明,而应该被广泛地认为属于所附权利要求中限定的范围,因此属于权利要求书的范围内的所有更改和修改、或者这样的范围的等价方案因而由所附权利要求书包含。
Claims (16)
1.一种清洁机器人,包括:
清洁器本体;
前轮,能旋转地设置在所述清洁器本体的前部中;
后轮,能旋转地设置在所述清洁器本体的后部中;
第一构件,附接到所述前轮的外周面并构造成与清洁目标表面接触;
第二构件,附接到所述后轮的外周面并构造成与所述清洁目标表面接触;
水箱,向所述前轮供应水;以及
供水管,将所述水从所述水箱引导到所述前轮,
其中所述前轮包括:
中空柱形壳体;以及
多个出口孔,贯穿所述柱形壳体,而且
所述中空柱形壳体与所述供水管连通,并且当所述前轮旋转时,离心力使得水经由所述多个出口孔流到所述第一构件,
所述清洁机器人还包括:
前部电机,驱动所述前轮;
后部电机,驱动所述后轮;以及
控制器,驱动所述前部电机和所述后部电机,
其中,所述前部电机和所述后部电机被构造成通过独立地被驱动而控制所述清洁机器人的行进,
其中,所述前部电机和所述后部电机能够在执行清洁时沿相反的方向旋转并能够使所述前轮和所述后轮中的任一个进行滑动,以增加摩擦力。
2.根据权利要求1所述的清洁机器人,还包括:
喷嘴,沿着所述前轮的旋转轴线朝向所述柱形壳体的内部突出,其中所述供水管将水供应到所述喷嘴。
3.根据权利要求1所述的清洁机器人,其中在所述供水管中设有泵,以及
所述泵被操作为将保持在所述水箱中的水经由所述供水管供应到所述前轮。
4.根据权利要求3所述的清洁机器人,其中所述前轮包括第一前轮和第二前轮,所述第一前轮和所述第二前轮分别设置在所述清洁器本体的两侧并设置成相对于所述清洁器本体的中心对称;以及
所述供水管包括将水从所述水箱引导到所述泵的进水管;以及
第一出水管和第二出水管将来自所述泵的水分别分流到所述第一前轮和所述第二前轮,所述第一出水管和所述第二出水管被设置在所述第一前轮面向所述第二前轮的部分中。
5.根据权利要求3所述的清洁机器人,其中所述泵被操作为当所述前轮旋转时将水供应到所述前轮。
6.根据权利要求1所述的清洁机器人,其中所述第一构件的含水量百分比低于所述第二构件的含水量百分比。
7.根据权利要求1所述的清洁机器人,其中所述前轮的水平宽度小于所述后轮的水平宽度。
8.根据权利要求1所述的清洁机器人,其中从上方观察,所述前轮与所述水箱重叠。
9.根据权利要求1所述的清洁机器人,其中所述前轮包括第一前轮和第二前轮,所述第一前轮和所述第二前轮分别设置在所述清洁器本体的两侧中并设置成相对于所述清洁器本体的中心对称,
所述前部电机还包括:
第一前部电机,驱动所述第一前轮;以及
第二前部电机,驱动所述第二前轮。
10.根据权利要求9所述的清洁机器人,其中所述第一前轮和所述第二前轮面向彼此,且所述第一前轮的旋转轴线与所述第二前轮的旋转轴线之间呈180度或更少的向前角度。
11.根据权利要求9所述的清洁机器人,其中所述第一前轮和所述第二前轮面向彼此,且所述第一前轮的旋转轴线与所述第二前轮的旋转轴线之间呈180度或更少的向后角度。
12.根据权利要求9所述的清洁机器人,还包括:
壳体,所述清洁器本体被放置在所述壳体上,
其中所述壳体包括设置所述前轮与所述后轮之间并支撑所述清洁器本体的支撑部。
13.根据权利要求12所述的清洁机器人,其中洗涤用水被保持在所述壳体中且所述第一构件和所述第二构件被浸入所述洗涤用水中。
14.根据权利要求12所述的清洁机器人,其中在所述壳体中设有叶片,所述叶片被构造为与所述第一构件或所述第二构件接触。
15.根据权利要求14所述的清洁机器人,其中设有一对叶片,且该对叶片被构造为与所述第一构件或所述第二构件的两侧接触。
16.根据权利要求1所述的清洁机器人,还包括:
电池,设置在所述清洁器本体中,
其中从上方观察,所述电池与所述水箱重叠。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2015-0134513 | 2015-09-23 | ||
| KR1020150134513A KR101692737B1 (ko) | 2015-09-23 | 2015-09-23 | 로봇 청소기 |
| PCT/KR2016/010513 WO2017052180A1 (en) | 2015-09-23 | 2016-09-21 | Robot cleaner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107613831A CN107613831A (zh) | 2018-01-19 |
| CN107613831B true CN107613831B (zh) | 2021-06-08 |
Family
ID=57831653
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680026183.1A Expired - Fee Related CN107613831B (zh) | 2015-09-23 | 2016-09-21 | 清洁机器人 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10813514B2 (zh) |
| EP (1) | EP3270756B1 (zh) |
| KR (1) | KR101692737B1 (zh) |
| CN (1) | CN107613831B (zh) |
| WO (1) | WO2017052180A1 (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108451447B (zh) * | 2017-02-17 | 2024-06-04 | 科沃斯机器人股份有限公司 | 清洁机器人 |
| AU2018203547B2 (en) * | 2017-06-02 | 2023-09-28 | Bissell Inc. | Self-cleaning system and method for extraction cleaners |
| WO2019231241A1 (ko) * | 2018-05-30 | 2019-12-05 | 주식회사 유진로봇 | 이동식 로봇 청소기 및 그를 위한 장치 |
| KR102136536B1 (ko) * | 2018-08-02 | 2020-07-22 | 주식회사 유진로봇 | 회전형 걸레 키트를 적용한 습식 로봇 청소기의 주행 성능 향상 장치 |
| KR102325528B1 (ko) * | 2020-04-28 | 2021-11-12 | 엘지전자 주식회사 | 로봇 청소기 |
| ES2901519A1 (es) * | 2021-08-06 | 2022-03-22 | Cecotec Res And Development S L | Fregona electrica |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100652260B1 (ko) * | 2004-12-06 | 2006-11-29 | 주식회사 대우일렉트로닉스 | 물걸레 청소기 |
| KR100822785B1 (ko) * | 2007-06-27 | 2008-04-17 | 김광현 | 물청소장치 |
| CN103027634A (zh) * | 2011-10-06 | 2013-04-10 | 三星电子株式会社 | 机器人吸尘器 |
Family Cites Families (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1520769A (en) * | 1921-03-18 | 1924-12-30 | John J Peterson | Floor-scrubbing machine |
| US1464031A (en) * | 1921-05-03 | 1923-08-07 | Glenn L Daly | Floor-scrubbing machine |
| US1619313A (en) * | 1925-05-25 | 1927-03-01 | Alva L Prince | Mopping and scrubbing machine |
| US1597644A (en) * | 1925-07-18 | 1926-08-24 | Wiener Clair | Combination floor cleaner and oiler |
| US2642601A (en) * | 1951-08-31 | 1953-06-23 | Ralph P Saffioti | Portable floor cleaning device with sponge covered cleaning roller |
| DE1149145B (de) * | 1957-11-23 | 1963-05-22 | Josef Grasmann Jun | Fussbodenreinigungsmaschine |
| US3789449A (en) * | 1972-06-21 | 1974-02-05 | Scott & Fetzer Co | Hard surface floor cleaner |
| SE432352B (sv) * | 1983-05-24 | 1984-04-02 | Postonen Arne Johannes | Maskin for rengoring av foretredesvis harda underlag |
| DK172087A (da) * | 1987-04-03 | 1988-10-04 | Rotowash Scandinavia | Apparat til vaadrensning af gulv- eller vaegflader |
| US5287581A (en) * | 1992-11-02 | 1994-02-22 | Lo Kam C | Cleaning device having at least one rotating cylindrical sponge |
| CN2154657Y (zh) * | 1993-02-19 | 1994-02-02 | 黄普磊 | 滚轮手推式地面收尘器 |
| US5735959A (en) * | 1994-06-15 | 1998-04-07 | Minolta Co, Ltd. | Apparatus spreading fluid on floor while moving |
| US5636402A (en) * | 1994-06-15 | 1997-06-10 | Minolta Co., Ltd. | Apparatus spreading fluid on floor while moving |
| JPH0947413A (ja) * | 1995-08-08 | 1997-02-18 | Minolta Co Ltd | 清掃ロボット |
| FR2745169B1 (fr) * | 1996-02-23 | 1999-12-31 | Vap Ind France Sa | Appareil combinant dans un meme boitier mobile un aspirateur a poussiere et un generateur de vapeur |
| US5657504A (en) * | 1996-10-03 | 1997-08-19 | Khoury; Fouad M. | Roller mop with wet roller, squeegee, and debris pickup |
| DE69811304T2 (de) * | 1997-09-16 | 2003-08-14 | Johnsondiversey, Inc. | Vorrichtung, Einheit und Verfahren zur Flächenpflege |
| AT406633B (de) * | 1998-04-14 | 2000-07-25 | Rotowash Reinigungsmasch Gmbh | Bodenreinigungsmaschine |
| CN2402252Y (zh) * | 1999-11-11 | 2000-10-25 | 薛尧明 | 室内地板清洗机 |
| US6883201B2 (en) * | 2002-01-03 | 2005-04-26 | Irobot Corporation | Autonomous floor-cleaning robot |
| KR100922506B1 (ko) * | 2001-03-16 | 2009-10-20 | 비젼 로보틱스 코포레이션 | 카니스터형 자동 진공 청소기 및 그 시스템 및 이를 사용하여 진공청소를 하는 방법 |
| US20040172769A1 (en) * | 2001-06-20 | 2004-09-09 | Giddings Daniel G. | Method and apparatus for cleaning fabrics, floor coverings, and bare floor surfaces utilizing a soil transfer cleaning medium |
| US6662402B2 (en) * | 2001-06-20 | 2003-12-16 | Tennant Company | Apparatus for cleaning fabrics, floor coverings, and bare floor surfaces utilizing a soil transfer cleaning medium |
| CN2510005Y (zh) * | 2001-09-06 | 2002-09-11 | 吴连宝 | 蒸气清洁机结构 |
| US6735812B2 (en) * | 2002-02-22 | 2004-05-18 | Tennant Company | Dual mode carpet cleaning apparatus utilizing an extraction device and a soil transfer cleaning medium |
| DE10256090B4 (de) * | 2002-12-02 | 2010-04-22 | BSH Bosch und Siemens Hausgeräte GmbH | Wischvorrichtung mit Antrieb |
| KR20050012047A (ko) * | 2003-07-24 | 2005-01-31 | 삼성광주전자 주식회사 | 회전 물걸레 청소유닛을 구비한 로봇청소기 |
| JP2005211364A (ja) * | 2004-01-30 | 2005-08-11 | Funai Electric Co Ltd | 自走式掃除機 |
| US8392021B2 (en) * | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| ATE468062T1 (de) * | 2005-02-18 | 2010-06-15 | Irobot Corp | Autonomer oberflächenreinigungsroboter für nass- und trockenreinigung |
| US20060190132A1 (en) * | 2005-02-18 | 2006-08-24 | Christopher John Morse | Autonomous surface cleaning robot for dry cleaning |
| US20060184293A1 (en) * | 2005-02-18 | 2006-08-17 | Stephanos Konandreas | Autonomous surface cleaning robot for wet cleaning |
| US7620476B2 (en) * | 2005-02-18 | 2009-11-17 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| KR100661339B1 (ko) * | 2005-02-24 | 2006-12-27 | 삼성광주전자 주식회사 | 로봇 청소기 |
| AU2006284577B2 (en) * | 2005-09-02 | 2012-09-13 | Neato Robotics, Inc. | Multi-function robotic device |
| EP2270619B1 (en) * | 2005-12-02 | 2013-05-08 | iRobot Corporation | Modular robot |
| KR20070101002A (ko) * | 2006-04-10 | 2007-10-16 | 이바도 | 위성 방식의 청소로봇 시스템 |
| KR101168481B1 (ko) * | 2007-05-09 | 2012-07-26 | 아이로보트 코퍼레이션 | 자동 커버리지 로봇 |
| KR100962121B1 (ko) * | 2008-02-11 | 2010-06-10 | 신정영 | 물걸레 로봇청소기 및 이의 자동세탁 기능을 가지는 충전기 |
| KR101543490B1 (ko) | 2008-04-24 | 2015-08-10 | 아이로보트 코퍼레이션 | 로봇 가능화 모바일 제품을 위한 위치 측정 시스템, 위치 결정 시스템 및 운전 시스템의 적용 |
| US8001651B2 (en) * | 2008-06-19 | 2011-08-23 | National Taipei University Of Technology | Floor washing robot |
| US8662781B2 (en) * | 2010-03-26 | 2014-03-04 | Christopher C. Sappenfield | Cleaning implements, cleaning material components, and related methods |
| US20100125968A1 (en) * | 2008-11-26 | 2010-05-27 | Howard Ho | Automated apparatus and equipped trashcan |
| CN201578183U (zh) * | 2009-12-30 | 2010-09-15 | 汪一鸣 | 高效环保滚轮式扫地装置 |
| EP2387932A1 (en) * | 2010-05-20 | 2011-11-23 | Koninklijke Philips Electronics N.V. | Device for cleaning a surface, comprising at least one rotatable brush |
| US20120167917A1 (en) * | 2011-01-03 | 2012-07-05 | Gilbert Jr Duane L | Autonomous coverage robot |
| US20120189507A1 (en) * | 2011-01-24 | 2012-07-26 | Ko Joseph Y | Modular automatic traveling apparatus |
| KR101311295B1 (ko) * | 2011-07-13 | 2013-09-25 | 주식회사 유진로봇 | 이동 로봇의 휠 조립체 |
| US20130145572A1 (en) * | 2011-07-27 | 2013-06-13 | Irobot Corporation | Surface Cleaning Robot |
| RU2603600C2 (ru) | 2011-08-23 | 2016-11-27 | Конинклейке Филипс Н.В. | Чистящее устройство для чистки поверхности, содержащее щетку и элемент скребка |
| US9173536B2 (en) * | 2011-08-23 | 2015-11-03 | Koninklijke Philips N.V. | Cleaning device for cleaning a surface comprising a brush and a squeegee element |
| RU2604456C2 (ru) * | 2011-10-03 | 2016-12-10 | Конинклейке Филипс Н.В. | Устройство для очистки поверхности |
| US8904595B2 (en) * | 2011-12-13 | 2014-12-09 | Electrolux Home Care Products, Inc. | Vacuum cleaner floor seal |
| GB2502131B (en) * | 2012-05-17 | 2014-11-05 | Dyson Technology Ltd | Autonomous vacuum cleaner |
| GB2502132B (en) * | 2012-05-17 | 2014-11-05 | Dyson Technology Ltd | Autonomous vacuum cleaner |
| JP2014045898A (ja) * | 2012-08-30 | 2014-03-17 | Sharp Corp | 掃除装置 |
| EP2730204B1 (en) * | 2012-11-09 | 2016-12-28 | Samsung Electronics Co., Ltd. | Robot cleaner |
| CN103799918A (zh) * | 2012-11-14 | 2014-05-21 | 深圳市恒润晖光电科技有限公司 | 具有容易拆装侧刷的自走吸尘器 |
| CN104869881B (zh) * | 2012-12-20 | 2017-03-08 | 皇家飞利浦有限公司 | 用于清洁表面的清洁设备 |
| US9282867B2 (en) * | 2012-12-28 | 2016-03-15 | Irobot Corporation | Autonomous coverage robot |
| US20140208527A1 (en) * | 2013-01-25 | 2014-07-31 | Ching-Chi Lin | Automatic floor sweeping and mopping device |
| KR102054689B1 (ko) | 2013-01-31 | 2020-01-22 | 삼성전자주식회사 | 청소 로봇 및 그 제어 방법 |
| DE102013108905A1 (de) | 2013-08-19 | 2015-02-19 | Vorwerk & Co. Interholding Gmbh | Zur Feuchtreinigung ausgebildetes Reinigungsgerät |
| US20150082579A1 (en) * | 2013-09-26 | 2015-03-26 | Ching-Chi Lin | Electric sweeping washing device |
| KR101578879B1 (ko) * | 2014-03-11 | 2015-12-18 | 에브리봇 주식회사 | 로봇 청소기 및 그의 제어 방법 |
| US9877626B2 (en) * | 2014-05-07 | 2018-01-30 | AI Incorporated | Horizontal agitator for robotic vacuum |
| CN104172993B (zh) * | 2014-08-21 | 2018-01-16 | 广东宝乐机器人股份有限公司 | 一种在智能扫地机上具有多种清洁方式的方法及其装置 |
| US10463219B2 (en) * | 2014-10-03 | 2019-11-05 | Makita Corporation | Self-propelled, dust-collecting robot |
| US9713411B2 (en) * | 2014-10-20 | 2017-07-25 | The Kirby Company / Scott Fetzer Company | Surface-treatment apparatus and head unit |
| AU2018203547B2 (en) * | 2017-06-02 | 2023-09-28 | Bissell Inc. | Self-cleaning system and method for extraction cleaners |
-
2015
- 2015-09-23 KR KR1020150134513A patent/KR101692737B1/ko active IP Right Grant
-
2016
- 2016-09-21 EP EP16848906.0A patent/EP3270756B1/en active Active
- 2016-09-21 US US15/569,598 patent/US10813514B2/en active Active
- 2016-09-21 CN CN201680026183.1A patent/CN107613831B/zh not_active Expired - Fee Related
- 2016-09-21 WO PCT/KR2016/010513 patent/WO2017052180A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100652260B1 (ko) * | 2004-12-06 | 2006-11-29 | 주식회사 대우일렉트로닉스 | 물걸레 청소기 |
| KR100822785B1 (ko) * | 2007-06-27 | 2008-04-17 | 김광현 | 물청소장치 |
| CN103027634A (zh) * | 2011-10-06 | 2013-04-10 | 三星电子株式会社 | 机器人吸尘器 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3270756B1 (en) | 2021-10-27 |
| WO2017052180A1 (en) | 2017-03-30 |
| US20180296053A1 (en) | 2018-10-18 |
| CN107613831A (zh) | 2018-01-19 |
| EP3270756A1 (en) | 2018-01-24 |
| US10813514B2 (en) | 2020-10-27 |
| EP3270756A4 (en) | 2018-12-19 |
| KR101692737B1 (ko) | 2017-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108024682B (zh) | 机器人清洁器 | |
| CN107613831B (zh) | 清洁机器人 | |
| KR102320896B1 (ko) | 로봇 청소기 | |
| KR102083193B1 (ko) | 로봇 청소기 | |
| JP5705221B2 (ja) | 床洗浄機における洗浄液を長時間使用するための方法及び装置 | |
| KR101961371B1 (ko) | 이동로봇 | |
| KR20190003776A (ko) | 청소기 | |
| KR20210036736A (ko) | 로봇청소기 및 로봇청소기의 제어방법 | |
| CN106166050A (zh) | 一种擦地机器人 | |
| US20240148215A1 (en) | Base station and cleaning robot system | |
| WO2022121424A1 (zh) | 基站及清洁机器人系统 | |
| CN116509253A (zh) | 一种表面清洁系统的自清洗方法 | |
| US11825933B2 (en) | Liquid-permeable brush roll for use with cleaners including robotic cleaners | |
| CN218978806U (zh) | 清洁设备 | |
| CN115462717B (zh) | 基站和清洁设备系统 | |
| TW202304367A (zh) | 基站及清潔機器人系統 | |
| KR20170050373A (ko) | 로봇 청소기 | |
| KR20160004529U (ko) | 전원선 유입이 방지되는 물걸레 청소기 | |
| EP4338649A1 (en) | Floor treatment machine | |
| CN219166296U (zh) | 清洁设备 | |
| KR20190085388A (ko) | 청소 로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20210608 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |