CN107531411B - 储存和取回系统 - Google Patents
储存和取回系统 Download PDFInfo
- Publication number
- CN107531411B CN107531411B CN201680016181.4A CN201680016181A CN107531411B CN 107531411 B CN107531411 B CN 107531411B CN 201680016181 A CN201680016181 A CN 201680016181A CN 107531411 B CN107531411 B CN 107531411B
- Authority
- CN
- China
- Prior art keywords
- pickface
- storage
- transport
- pickfaces
- retrieval system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012546 transfer Methods 0.000 claims abstract description 299
- 238000003032 molecular docking Methods 0.000 claims abstract description 127
- 239000000872 buffer Substances 0.000 claims abstract description 116
- 238000000034 method Methods 0.000 claims description 37
- 230000000694 effects Effects 0.000 claims description 28
- 230000003139 buffering effect Effects 0.000 claims description 8
- 239000012636 effector Substances 0.000 claims description 7
- 230000032258 transport Effects 0.000 description 194
- 239000010410 layer Substances 0.000 description 49
- 230000002093 peripheral effect Effects 0.000 description 25
- 238000010586 diagram Methods 0.000 description 15
- 230000005540 biological transmission Effects 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 11
- 239000011295 pitch Substances 0.000 description 9
- 102100028633 Cdc42-interacting protein 4 Human genes 0.000 description 7
- 101000766830 Homo sapiens Cdc42-interacting protein 4 Proteins 0.000 description 7
- 101100206190 Arabidopsis thaliana TCP20 gene Proteins 0.000 description 6
- 101100082494 Oryza sativa subsp. japonica PCF1 gene Proteins 0.000 description 6
- 101100045761 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) TFC4 gene Proteins 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 101150099374 PCF2 gene Proteins 0.000 description 5
- 238000007726 management method Methods 0.000 description 5
- 235000014347 soups Nutrition 0.000 description 5
- 101100016388 Arabidopsis thaliana PAS2 gene Proteins 0.000 description 4
- 101100060179 Drosophila melanogaster Clk gene Proteins 0.000 description 4
- 101100297150 Komagataella pastoris PEX3 gene Proteins 0.000 description 4
- 101150038023 PEX1 gene Proteins 0.000 description 4
- 101100315760 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) PEX4 gene Proteins 0.000 description 4
- 235000013339 cereals Nutrition 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 230000002452 interceptive effect Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 101150014555 pas-1 gene Proteins 0.000 description 4
- 101100082497 Oryza sativa subsp. japonica PCF3 gene Proteins 0.000 description 3
- 101100219315 Arabidopsis thaliana CYP83A1 gene Proteins 0.000 description 2
- 101150076717 CUF1 gene Proteins 0.000 description 2
- 101100269674 Mus musculus Alyref2 gene Proteins 0.000 description 2
- 101100260216 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) BRF1 gene Proteins 0.000 description 2
- 101100140580 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) REF2 gene Proteins 0.000 description 2
- 101100222275 Schizosaccharomyces pombe (strain 972 / ATCC 24843) cuf2 gene Proteins 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000010397 one-hybrid screening Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 238000005096 rolling process Methods 0.000 description 2
- 241001061257 Emmelichthyidae Species 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 239000002537 cosmetic Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000012856 packing Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000002356 single layer Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images





































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0485—Check-in, check-out devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
- B65G1/0435—Storage devices mechanical using stacker cranes with pulling or pushing means on either stacking crane or stacking area
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
- B65G1/1376—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses the orders being assembled on a commissioning conveyor
Abstract
一种自动化储存和取回系统,包括:至少一个自主运输车辆;转移甲板,转移甲板为所述车辆限定运输表面;至少一个往复升降机;第一和第二拾取面对接站,第一和第二拾取面对接站连接至甲板并且彼此间隔分开,每个站在甲板上的车辆和每个站处的升降机之间形成拾取面转移对接,使得拾取面在每个站处的升降机和车辆之间转移,其中,车辆被构造成在第一站处拾取第一拾取面,横移经过甲板并且在第二站处缓冲第一拾取面或其至少一部分,使得第二站具有按照拾取面的有序顺序缓冲在共同支撑件上的多个拾取面,该有序顺序根据混合箱拾取面的预定箱输出有序顺序。
Description
相关申请的交叉引用
本申请是2015年1月16日提交的美国临时专利申请第62/104,520号的非临时申请并且要求其优先权,其全部内容通过引用的方式并入本文。
本申请还涉及2015年12月11日提交的美国专利申请第14/966,978号;2016年1月18日提交的美国专利申请第14/997,892号;2016年1月18日提交的美国专利申请第14/997,902号;2016年1月18日提交的美国专利申请第14/997,925号以及2015年1月23日提交的美国临时专利申请第62/107,135号,其全部内容通过引用的方式并入本文。
背景技术
1. 技术领域
本示例性实施例一般涉及物料处理系统,并且更加具体地涉及物料处理系统内的物品的运输和储存。
2. 相关发展的简要描述
多层储存和取回系统可以用在仓库中以用于货物的储存和取回。通常,利用如下装置来实现将货物运输到储存结构中以及运输出储存结构:用于转移至储存层上的车辆的升降机,沿着斜坡向上行进至预定储存层的车辆,或者包括沿着导路行进的升降机的车辆。储存在储存和取回系统内的货物通常储存在每个储存层上的储存空间中,因此置于该层上的运输车辆能够访问一层的储存空间。通常,将物品往返转移至在不同储存层之间承载车辆的储存空间的升降机被结合到车辆中(诸如,利用门式起重机)或者具有链斗式构造,其中,升降机有效负载搁架以预定速率连续地围绕框架运行。
从多层储存和取回系统输出的箱单元被转移至打包站,在这里,箱单元被放置在货盘上以用于装运。通常,货盘包括类似大小和形状的箱单元,从而使得在货盘上形成稳定的箱高度(有时具有置于各层之间的纸盘片材)。在一些情况中,货盘的堆层(tier)的每一层单独地形成并且然后放置在货盘上以便形成堆叠的堆层。混合货盘也是可能的。通常,当形成货盘层时,各箱被放置在缓冲站或者码垛站处的其他位置中,使得箱的尺寸被测量。计算机或者其他处理器基于该尺寸确定箱的结构,并且指示机器人拾取该箱以用于放置在货盘层中。
将有利的是,在将箱单元运输处储存和取回系统储存结构期间对用于放置在货盘上的箱单元进行分拣,以便增加储存和取回系统的吞吐量。
附图说明
在下列描述中结合附图对公开的实施例的前述方面和其它特征进行解释,在附图中:
图1和图1A是根据所公开的实施例的各个方面的自动化储存和取回系统的示意图;
图1B、图1C、图1D和图1E是根据所公开的实施例的各个方面的自动化储存和取回系统的各部分的示意图;
图1F是根据所公开的实施例的各个方面的自动化储存和取回系统形成的混合货盘负载的示意图;
图1G是根据所公开的实施例的各个方面的自动化储存和取回系统的一部分的示意图;
图2A和图2B是根据所公开的实施例的各个方面的储存和取回系统的各部分的示意图;
图3A和图3B是根据所公开的实施例的各个方面的储存和取回系统的各部分的示意图;
图4A、图4B和图5是根据所公开的实施例的各个方面的储存和取回系统的各部分的示意图;
图6是根据所公开的实施例的各个方面的运输车辆的示意图;
图6A是根据所公开的实施例的各个方面的运输车辆的示意图;
图7和图8是根据所公开的实施例的各个方面的运输车辆的各部分的示意图;
图9是根据所公开的实施例的各个方面的储存和取回系统的一部分的示意图;
图10、图10A至图10E是根据所公开的实施例的各个方面的运输车辆的各部分的示意图;
图11至图13是根据所公开的实施例的各个方面的储存和取回系统的各部分的示意图;
图14至图20是根据所公开的实施例的各个方面的示例性流程图;
图21、图22A和图22B是根据所公开的实施例的各个方面的自动化储存和取回系统的各部分的示意图;以及
图23是根据所公开的实施例的各个方面的示例性流程图。
图24是根据所公开的实施例的各个方面的储存和取回系统的一部分的示意图。
图25是根据所公开的实施例的各个方面的示例性流程图。
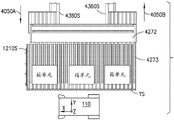
图26是根据所公开的实施例的各个方面的储存和取回系统的操作者站的示意图
图27是根据所公开的实施例的各个方面的示例性流程图。
具体实施方式
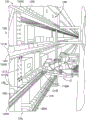
图1是根据所公开的实施例的各个方面的自动化储存和取回系统100的示意图。尽管将参照附图对所公开的实施例的各个方面进行描述,但应该理解的是,所公开的实施例的各个方面能够以多种形式实施。此外,可以使用任意合适大小、形状、或者类型的元件或者物料。
根据所公开的实施例的各个方面,自动化储存和取回系统100可以在零售分配中心或者仓库中进行操作,例如,以便履行从零售店接收的对于箱单元的订单,诸如,在2011年12 月15 日提交的美国专利申请第13/326,674 号中描述的那些,其全部公开内容通过引用的方式并入本文。例如,箱单元是没有储存在托盘中、装货物上或者货盘上(例如,不包含)的货物的箱或者单元。在其它示例中,箱单元是以任意合适的方式被包含在诸如托盘中、装货物上或者货盘上的货物的箱或者单元。在另外的其它示例中,箱单元是不包含的物品和包含的物品的组合。要注意的是,例如,箱单元包括装箱的货物单元(例如,汤罐头箱、麦片盒等)或者适于从货盘上取走或者置于货盘上的单个货物。根据所公开的实施例的各个方面,用于箱单元的装运箱(例如,纸板箱、桶、盒子、板条箱、水壶或者用于保持箱单元的任意其它的合适装置)可以具有可变的大小并且可以在装运中用于保持箱单元,并且可以被构造成使得它们能够被码垛以用于装运。要注意的是,例如,当箱单元的包裹或者货盘到达储存和取回系统处时,每个货盘的内含物可以是一致的(例如,每个货盘保持预定数量的相同物品:一个货盘保持汤并且另一货盘保持麦片),并且当货盘离开储存和取回系统时,货盘可以包含任意合适数量和组合的不同箱单元(例如,混合货盘,其中,每个混合货盘保持不同类型的箱单元:一个货盘保持汤和麦片的组合物),例如,这些不同箱单元按照分拣设置被提供至码垛机以用于形成混合货盘。在各个实施例中,本文中描述的储存和取回系统可以适于储存和取回箱单元的任意环境。
同样参照图1F,要注意的是,例如,当到来的箱单元的包裹或者货盘(例如,来自制造商或者供应商)到达储存和取回系统处以用于补货自动化储存和取回系统100 时,每个货盘的内含物可以是一致的(例如,每个货盘保持预定数量的相同物品:一个货盘保持汤并且另一货盘保持麦片)。如可以意识到的,这样的货盘负载的箱可以是基本上相似的,或者换言之是同类的箱(例如,具有相似尺寸),并且可以具有相同的库存单位(SKU)(如若不然,如之前所指出的,货盘可以是具有由同类箱形成的多层的“彩虹”货盘)。当货盘PAL离开储存和取回系统100 时(在箱装填有补货订单的情况下),货盘PAL 可以包含任意合适数量和组合的不同箱单元CU(例如,每个货盘可以保持不同类型的箱单元:一个货盘保持灌装汤、麦片、饮料包装、化妆品以及家用清洁剂的组合)。组合成单个货盘的箱可以具有不同的尺寸和/或不同的SKU。在示例性实施例的一个方面中,储存和取回系统100可以被构造成大体上包括进料区段、储存和分拣区段(其中,在一个方面中,物品的储存是可选的)以及输出区段,如下面将更加详细地描述的。如可以意识到的,在所公开的实施例的一个方面中,例如,作为零售配送中心操作的系统100 可以用于:接收具有一致的货盘负载的箱,对货盘货物进行分类或者将箱从一致的货盘负载分离成由该系统单独处理的独立的箱单元,取回每个订单寻求的不同箱并且将其分拣到对应组中,并且将对应的箱组运输并组装成所称的混合箱货盘负载MPL。如同样可以意识到的,如图26中所示,在所公开的实施例的一个方面中,例如,作为零售配送中心操作的系统100 可以用于:接收一致的货盘负载的箱,对货盘货物进行分类或者将箱从一致的货盘负载分离成由该系统单独处理的独立的箱单元,取回每个订单寻求的不同箱并且将其分拣到对应的组中,并且在操作者站160EP 处运输并排序对应的箱组(按照本文中描述的方式),其中,物品从不同的箱单元CU 中被拾取,并且/或者不同的箱单元CU 本身由操作者1500 或者任意合适的自动装置(例如,按照履行一个或多个顾客订单的拾取物品的预定的有序顺序)置于一个或多个袋子、装货物或者其它合适容器TOT中,其中,根据预定的有序顺序在操作者站160EP处对箱单元CU进行排序,要注意的是,如本文中描述的箱单元CU 的排序实现了在操作者站160EP 处的箱单元CU 的排序。进料区段通常能够将一致的货盘负载分解至各个箱,并且经由合适的运输器来运输这些箱以用于输入到储存和分拣区段中。在其他方面中,输出区段根据拾取物品的预定的有序顺序将适当组的有序箱单元(这些箱单元的SKU、尺寸等可以不同)在操作者站160EP处组装至袋子、装货物或者其他合适的容器中(诸如,以便填写客户订单)。
如下面将更详细地描述的,储存和分拣区段包括具有运输系统的多层自动化储存阵列,进而接收各个箱或者将各个箱或进给至储存区域中的用于储存的多层储存阵列中。储存和分拣区段还限定箱单元从多层储存阵列的出站运输,从而使得根据命令(该命令根据输入到诸如仓库管理系统2500的仓库管理系统中的订单而生成)独立地取回需要的箱单元以用于运输至输出区段。在其它方面中,储存和分拣区段接收各个箱,对各个箱进行分拣(例如,使用本文中描述的缓冲器和对接站),并且根据输入到仓库管理系统中的顺序而将各个箱转移至输出区段。根据顺序(例如,订单输出顺序)对箱进行分拣和分组可以整体地或者部分地由储存和取回区段或者输出区段或者这两者来执行,二者之间的界线是为了便于描述并且分拣和分组能够以任意数量的方式执行。预期结果在于:输出区段按照在例如2012年10月17日提交的美国专利申请第13/654,293号(现在为美国专利第8,965,559号),其公开内容全部以引用的方式并入本文。
在示例性实施例中,输出区段以可能被称为混合箱堆体的结构化架构的方式形成货盘负载。本文中描述的货盘负载的结构化架构是代表性的,并且在其它方面中,货盘负载可以具有任意其它合适的构造。例如,结构化架构可以是任意合适的预定构造,诸如,运输车舱负载或者保持结构化负载的其它合适的容器或者负载容器包。货盘负载的结构化架构的特征可以在于具有多个平坦的箱层L121-L125、L12T,该多个平坦箱层中的至少一个由多个混合箱的非交叉的、无需支撑的且稳定的堆体形成。给定层的混合箱堆体基本上具有相同的高度以便形成如可以意识到的给定层的基本上平坦的顶部和底部表面,并且在数量上足以覆盖货盘区域或货盘区域的期望部分。(多个)重叠层可以被定向成使得该(多个)层的对应箱桥接在支撑层的堆体之间。因此,使堆体稳定并且对应地使货盘负载的(多个)对接层稳定。在将货盘负载限定成结构化层架构时,所联接的三维货盘负载方案被分解成可以单独保存的两个部分:将负载分解成多个层的竖直(一维)部分,以及高效地分布具有相等高度的堆体以便装填每个层的货盘高度的水平(二维)部分。如下面将描述的,储存和取回系统将箱单元输出至输出区段以使得三维货盘负载方案的两个部分被分解。混合货盘负载的预定结构将箱单元(无论该箱单元是单个箱单元拾取面(pickface)还是由分拣和输出区段提供的组合箱单元拾取面)的顺序限定至负载构造系统(其可以自动化装载或者手动装载)。
根据所公开的实施例的各个方面,自动化储存和取回系统100 包括:输入站160IN(其包括卸垛机160PA和/或输送器160CA 以用于将物品运输至升降机模块以从而进入储存器中)和输出站160UT(其包括码垛机160PB、操作站160EP和/或输送器160CB 以用于运输来自升降机模块的箱单元从而从储存器中移除)、输入和输出竖直升降机模块150A 和150B(一般称为升降机模块150:要注意的是,虽然示出了输入和输出升降机模块,但是可以使用单个升降机模块以便输入箱单元以及从储存结构中移除箱单元)、储存结构130、以及多个自主漫游器(rover)或者运输车辆110(本文中称为“机器人”)。要注意的是,卸垛机160PA可以被构造成从货盘上移除箱单元,以便使得输入站160IN 能够将物品运输至升降机模块150 以用于输入到储存结构130 中。码垛机160PB 可以被构造成将从储存结构130 上移除的物品放置在货盘PAL(图1F)以用于装运。当在本文中使用时,升降机模块150,储存结构130和机器人110在本文中共同地称为上面提到的多层自动化储存阵列(例如,储存和分拣区段)以便限定(例如,相对于例如图6的机器人110参考系REF或者任意其他合适的储存盒取回系统参考系)用于三维多层自动化储存阵列的运输/吞吐量轴线(例如,以三维方式),其中,每个吞吐量轴线具有整体的“即时分拣”(例如,在箱单元的运输期间的箱单元的分拣),使得箱单元的分拣和吞吐量基本上同时进行,而不需要如下面将进一步详细描述的专用分拣器。沿着每个吞吐量轴线的分拣是可选择的,使得沿着所有吞吐量轴线或者一个或多个吞吐量轴线的组合实现负载输出(例如,将离开的箱单元转移以便形成货盘负载),以及相对于没有任何分拣的箱单元的吞吐量(例如,“无分拣”吞吐量)基本上没有吞吐量成本。作为与分拣相关的箱单元吞吐量的示例,还参考图1A,储存和取回系统100包括多个吞吐量区域。例如,存在多层箱单元储存吞吐量130LTP(例如,将箱单元放置至储存器中),水平箱单元运输吞吐量110TP(例如,沿着失去通道和转移甲板从储存器转移(多个)箱单元),箱缓冲吞吐量BTSTP(例如,缓冲箱单元以便有助于箱单元在储存器和竖直运输器之间的转移),竖直运输吞吐量150TP(例如,通过竖直升降机转移箱单元),以及位于输出站160TP处的吞吐量,例如,其包括通过传输器160CB的运输和通过码垛机160PB的码垛。在一个方面中,如在本文中描述的,箱单元的分拣与箱单元沿着每个吞吐量轴线(例如,相对于例如机器人110或者升降机150坐标系的X、Y、Z轴线)的吞吐量130LTP、110TP、BTSTP、150TP基本上同时实现(例如,“即时”),并且沿着每个轴线的分拣能够独立地选择以使得沿着一个或多个X、Y、Z轴线实现分拣。
如可以意识到的,在一个方面中,当机器人110正移动经过箱单元/拾取面保持位置和处于静态/站立之一时(例如,没有横移经过转移甲板、拾取通道等),箱单元的即时分拣在机器人110上进行,而不用卸载机器110承载的箱单元/拾取面。如下面将描述的,高密度多层搁架通道中的一个或多个、线性缓冲站BS沿着转移甲板130B和线性多位置转移站TS实现基本上即时的与沿着X轴线的吞吐量同时进行的分拣。如下面还将描述的,机器人110转移臂和末端执行器110PA中的一个或多个(其被构造成通过末端执行器沿着Y轴线横移分拣箱/拾取面以用于多次独立拾取/放置箱/拾取面,其中,Y轴线由转移臂110PA的延伸部限定并且处于相对于机器人110沿着拾取通道130A限定的运输轴线的另一个成角度的不同方向),并且升降机150的独立负载处理装置(被构造用于通过负载处理装置沿着Y轴线的延伸而在升降机平台上的分拣)实现基本上与沿着Y轴线的吞吐量同时进行的即时分拣。如可以意识到的,升降机150被构造成在不同的转移甲板层之间运输拾取面并且提供基本上与沿着Z轴线的吞吐量同时进行的即时分拣(该Z轴线由升降机150限定),如本文中将描述的。在一个方面中,升降机被构造成从一个或多个转移甲板层拾取一个或多个拾取面,并且将一个或多个拾取面转移至储存和取回系统100的负载填充区段或单元(诸如,输出站160UT)。术语“负载填充区段”或者“负载填充单元”(在本文中互换使用,并且一般被称为负载填充)表示货盘负载填充区段/单元(诸如,用于创建混合货盘负载MPL)或者如关于图26描述的逐条的负载填充区段/单元。
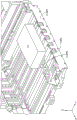
同样参照图1G和图2A,储存结构130可以包括以高密度三维货架阵列RMA构造的多个储存货架模块RM,该多个储存货架模块RM能够通过储存器或者甲板层130L访问。当在本文中使用时,术语“高密度三维货架阵列”表示具有沿着拾取通道130A分布的非确定性开放搁架的三维货架阵列RMA,其中,能够从共同拾取通道进行表面或者拾取通道层访问多个堆叠搁架(例如,箱单元放置在每个动态分配的储存空间内的拾取通道层处,使得箱单元之间的竖直空间/间距VG和水平空间/间距G在每个拾取通道层处最小化,如下面将更详细地描述的)。
每个储存层130L包括由货架模块RM形成的拾取面储存/移交(handoff)空间130S(在本文中称为存储空间130S),其中,该货架模块包括沿着储存或拾取通道130A 设置的搁架(储存或拾取通道130A连接至转移甲板130B),例如,该储存或拾取通道130A线性地延伸通过货架模块阵列RMA并且提供机器人110对储存空间130S和(多个)转移甲板130B的访问。在一个方面中,货架模块RM的搁架如沿着拾取通道130A分布的多层搁架设置。如可以意识到的,机器人110在相应储存层130L上沿着拾取通道130A和转移甲板130B行进以用于在储存结构130 的任意储存空间130S(例如,在机器人110 所位于的层上)与任意升降机模块150之间转移箱单元(例如,每个机器人110 都能访问相应层上的每个储存空间130S以及相应储存层130L上的每个升降机模块150)。转移甲板130B被设置在不同层处(对应于储存和取回系统的每个层130L),该多层甲板可以彼此上下堆叠或者水平偏移地堆叠,诸如,一个转移甲板130B位于储存货架阵列RMA的一个端部或侧部RMAE1处或者位于储存货架阵列RMA的多个端部或侧部RMAE1、RMAE2处,例如,如在2011 年12 月15 日提交的美国专利申请第13/326,674 号中描述的,其全部公开内容通过引用的方式并入本文。
转移甲板130B基本上是开放的并且被构造用于机器人110 沿着多个行进车道(例如,沿着关于图6所示的机器人参考系的X吞吐量轴线)跨过并沿着转移甲板130B的非确定性横移。如可以意识到的,在每个储存层130L处的(多个)转移甲板130B与相应储存层130L上的每个拾取通道130A连通。机器人110 在(多个)转移甲板130B与每个相应储存层130L上的拾取通道130A之间双向地横移以便沿着拾取通道行进(例如,沿着关于图6所示的机器人参考系的X吞吐量轴线)并且访问在每个拾取通道130A旁边设置在货架搁架中的储存空间130S(例如,机器人110可以沿着Y吞吐量轴线访问分布在每个通道的两侧上的储存空间130S,以使得在机器人110横向经过每个拾取通道130A时可以具有不同的朝向,例如,参考图6,驱动轮202前往行进方向,或者驱动轮驶离行进方向)。如可以意识到的,从对应于预定储存或甲板层130L的水平平面中的储存阵列出站的吞吐量由沿着X和Y吞吐量轴线的组合或者集成吞吐量实现并且显现。如上面所指出的,(多个)转移甲板130B还向相应储存层130L上的每个升降机150提供机器人110,其中,升降机150 将箱单元进给至每个储存层130L中和/或从每个储存层130L中移除箱单元(例如,沿着Z吞吐量轴线),以及其中,机器人110实现在升降机150与储存空间130S之间的箱单元转移。
如上文所描述的,同样参照图2A,在一个方面中,储存结构130包括多个储存货架模块RM,该多个储存货架模块RM以三维阵列RMA的方式构造,其中,货架设置在通道130A中,通道130A被构造用于使机器人110在通道130A内行进。转移甲板130B具有非确定性运输表面,机器人100在该非确定性运输表面上行进,其中,非确定性运输表面130BS具有连接通道130A的多于一个的并列行进车道(例如,高速机器人行进路径HSTP)。如可以意识到的,并列行进车道沿着转移甲板130B的相对侧130BD1和130BD2之间的共同非确定性运输表面130BS并列。如图2A中图示的,在一个方面中,通道130A在转移甲板130B的一侧130BD2上连接至转移甲板130B,但在其它方面中,通道按照基本上类似于2011年12月15日提交的美国专利申请第13/326,674号(其公开内容在之前已全部以引用的方式并入本文)中描述的方式连接至转移甲板130B的多于一个的侧部130BD1和130BD2。如下面将更加详细的描述的,转移甲板130B的另一侧130BD1包括甲板储存货架(例如,对接站TS和缓冲站BS),该甲板储存货架沿着转移甲板130B的另一侧130BD1分布,使得转移甲板的至少一部分置于甲板储存货架(诸如李如,缓冲站BS或者转移站TS)与通道130A之间。甲板储存货架沿着转移甲板130B的另一侧130BD1设置,使得甲板储存货架与来自转移甲板130B的机器人110以及升降机模块150连通(例如,通过来自转移甲板130B的机器人110以及通过升降机150访问甲板储存货架以用于拾取和放置拾取面,使得在机器人110与甲板储存货架之间、以及在甲板储存货架与升降机150之间、以及因此在机器人110与升降机150之间转移拾取面)。
再次参考图1,每个储存层130L还可以包括充电站130C以用于给该储存层130L上的机器人110的车载电源充电,诸如例如,在2014年3月13日提交的美国专利申请第14/209,086号和2011年12月15日提交的13/326,823(现在为美国专利第9,082,112号)中描述的,其公开内容全部以引用的方式并入本文。
机器人110可以是任意合适的可独立操作的自主运输车辆,该自主运输车辆沿着X和Y吞吐量轴线在整个储存和取回系统100中承载和转移箱单元。在一个方面中,机器人110是自动化的独立的(例如,自由行驶的)自主运输车辆。仅为了示例性目的,机器人的合适示例能够在如下文件中找到:2011年12月15日提交的美国专利申请第13/326,674号;2010年4月9日提交的美国专利申请第12/757,312号(现在为美国专利第8,425,173号);2011年12月15日提交的美国专利申请第13/326,423号;2011年12月15日提交的美国专利申请第13/326,447号(现在为美国专利第8,965,619号);2011年12月15日提交的美国专利申请第13/326,505号(现在为美国专利第8,696,010号);2011年12月15日提交的美国专利申请第13/327,040号(现在为美国专利第9,187,244号);2011年12月15日提交的美国专利申请第13/326,952号;2011年12月15日提交的美国专利申请第13/326,993号;2014年9月15日提交的美国专利申请第14/486,008号;以及2015年1月23日提交的美国临时专利申请第62/107,135号,其公开内容全部以引用的方式并入本文。机器人110(在下面更加详细地进行描述)可以被构造成将箱单元(诸如,上文所描述的零售商品)放置到储存结构130的一个或多个层中的拾取存货中,并且然后选择性地取回订购的箱单元。如可以意识到的,在一个方面中,储存阵列的吞吐量轴线X和Y(例如,拾取面运输轴线)由拾取通道130A、至少一个转移甲板130B、机器人110以及机器人110的可延伸末端执行器(如在本文中描述的)限定(并且在其他方面中,升降机150的可延伸末端执行器还至少部分地限定Y吞吐量轴线)。拾取面在储存和取回系统100的入站区段(诸如例如,输入站160IN)和储存和取回系统100的负载填充区段(诸如例如,输出站160UT)之间被运输,入站至阵列的拾取面形成在入站区段处,从阵列出站的拾取面被设置成根据预定的负载填充有序顺序填充负载。在一个方面中,储存货架模块RM和机器人110被设置成使得将储存货架模块RM和机器人110组合实现在吞吐量轴线的至少一个上(或者在其他方面中在多于一个的每个轴线的至少一个上)的混合箱拾取面与运输同时进行的即时分拣,使得两个或更多个拾取面从一个或多个储存空间被拾取并且放置在一个或多个拾取面保持位置处(诸如李如,缓冲站和转移站BS、TS),根据预定的负载填充有序顺序,这些拾取面保持位置与储存空间130S不同。
储存和取回系统100的机器人110、升降机模块150以及其它合适的特征是由例如一个或多个中央系统控制计算机(例如,控制服务器)120通过例如任意合适的网络180按照诸如任意合适的方式进行控制。在一个方面中,网络180是有线网络、无线网络、或者使用任意合适类型和/或数量的通信协议的有线网络和无线网络的组合。在一个方面中,控制服务器120包括一系列基本上同时运行的程序(例如,系统管理软件)以用于基本上自动地控制该自动化储存和取回系统100。例如,仅为了示例性目的,被构造成管理储存和取回系统100的该系列基本上同时运行的程序包括:控制、规划以及监测所有有源系统部件的活动,管理库存(例如,哪些箱单元被输入和移除、箱被移除的顺序、以及箱单元储存的地点)和拾取面(例如,能够作为整体移动并且作为整体由储存和取回系统的部件处理的一个或多个箱单元),以及与仓库管理系统2500对接。在一个方面中,控制服务器120可以被构造成按照本文中描述的方式控制储存和取回系统的特征。为了简单且易于解释,本文中通常使用术语“箱单元”表示各个箱单元和拾取面(拾取面由作为整体移动的多个箱单元形成)。
同样参照图1、图1B和图1D,储存结构130的货架模块阵列RMA包括限定高密度自动化储存阵列的竖直支撑构件1212和水平支撑构件1200,如下面将更加详细地描述的。例如,轨道1200S可以在拾取通道130A中安装至竖直支撑构件1212和水平支撑构件1200中的一个或多个,并且被构造成使得机器人110沿着轨道1200S行驶通过拾取通道130A。至少一个储存层130L的至少一个拾取通道130A的至少一侧可以具有一个或多个储存搁架(例如,由轨道1210和1200以及板条1210S形成),该一个或多个储存搁架设置在不同高度处以便在由转移甲板130B (以及形成通道甲板的轨道1200S)限定的储存器和甲板层130L之间形成多个搁架层130LS1-130LS4。相应地,存在与每个储存层130L对应的多个货架搁架层130LS1-130LS4,其沿着与相应储存层130L的转移甲板130B连通的一个或多个拾取通道130A延伸。如可以意识到的,多个货架搁架层130LS1-130LS4实现了具有储存的箱单元的堆体的每个储存层130L(或者箱层),能够从相应储存层130L的共同甲板1200S访问该储存的箱单元(例如,储存的箱的堆体位于储存层之间)。
如可以意识到的,横向经过拾取通道130A的机器人110在对应储存层130L中能够访问(例如,为了拾取和放置箱单元)在每个搁架层130LS1-130LS4上可用的每个储存空间130S,其中,每个搁架层130LS1-130LS4位于拾取通道130A的一侧或多侧PAS1、PAS2(例如,参见图2A)上的相邻竖直堆叠的储存层130L之间。如上面指出的,机器人110能够通过轨道1200(例如,通过与相应储存层130L上的转移甲板130B对应的共同拾取通道甲板1200S)访问每个储存搁架层130LS1-130LS4。如能够在图1B和图1D中看到的,存在一个或多个中间搁架轨道1210,该一个或多个搁架轨道1210彼此(并且与轨道1200)竖直地隔开(例如,在Z 方向上)以便形成多个堆叠储存空间130S,机器人110能够通过共同轨道1200S访问每个堆叠储存空间130S。如可以意识到的,水平支撑构件1200还形成其上放置箱单元的搁架轨道(除了搁架轨道1210 之外)。
对应储存层130L的每个堆叠搁架层130LS1-130LS4(和/或如下文描述的每个单个搁架层)限定开放且非确定性的二维储存表面(例如,具有如图1D中示出的箱单元支撑平面CUSP),这促进纵向地(例如,沿着通道的长度或者与拾取通道限定的机器人行进路径一致)以及侧向地(例如,相对于货架深度,横向于通道或者机器人行进路径)动态分配拾取面。例如,拾取面以及构成拾取面的箱单元的动态分配是按照2013年11月26日公布的美国专利第8,594,835号中描述的方式来设置,其公开内容全部以引用的方式并入本文。例如,控制器(诸如控制器120)监测储存在搁架上的箱单元以及箱单元之间的空的空间或储存位置。仅为了示例性目的,空的储存位置被动态分配成使得具有第一大小的一个箱由每个具有第二大小的三个箱代替,当组合时该第二大小装配至之前为第一大小的箱保留的空间中,或者反之亦然。当箱单元放置在储存搁架上以及从储存搁架移除时,动态分配基本上持续地改变空的储存位置(例如,储存位置在储存搁架上没有预定的大小和/或位置)。这样一来,可变长度和宽度的箱单元(或者装货物)拾取面定位在储存搁架上(例如,每个储存搁架层130LS1-130LS4上)的每个二维储存位置处,其中,相邻的储存的箱单元/储存空间之间具有最小间隙G(例如,该最小间隙G实现箱单元的拾取/放置不与储存在该搁架上的其它箱单元接触,见图1B)。
如上面描述的,轨道1200、1210(例如,储存搁架)之间的间距是可变间距以便使竖直堆叠的箱单元之间的竖直间距VG最小化(例如,仅提供足够的间隙以用于掺入箱单元并且从相应储存位置移除箱单元)。如下面将描述的(例如,相对于图1B和2A中的截面SECA、SECB),在一个方面中,轨道1200、1210之间的竖直间距沿着相应的拾取通道130A的长度变化,而在其他方面中,轨道1200、1210之间的间距可以基本上沿着拾取通道130A继续。如可以意识到的并且如下面将更详细地描述的,在拾取通道130A的一侧PAS1上的轨道1200、1210之间的间距可以与相同拾取通道130A的相对侧PAS2(图2A)上的轨道1200、1210之间的间距不同。如可以意识到的,任意合适数量的搁架1210可以设置在相邻的竖直堆叠的储存层130L的甲板1200S之间,其中,搁架在搁架之间具有相同或者不同的间距(例如,见图1C,其中,箱单元CUD1、CUD2、CUE1-CUE3、CUF1、CUF2位于拾取通道的一侧上的竖直堆体中,并且箱单元CUA、CUB、CUC位于具有基本上相似间距的储存搁架上的拾取通道的相对侧上的竖直堆体中)。在所公开的实施例的一个方面中,参见图1B,货架搁架层130LS1-130LS4之间的竖直间距(与每个储存层130L相对应)是变化的,使得搁架之间的高度Z1A-Z1E是不同的而不是相等的,例如,以便使箱单元CU的上部或顶部表面CUTS之间的竖直间距VG最小化,并且储存搁架1200、1210的底部直接位于箱单元上方。如在图1B中能够看到的,在水平和竖直方向上最小化间距G、VG导致储存货架内的密集包装的箱单元结构以便形成高密度的三维货架阵列RMA,例如其中,高密度多层搁架通道增加沿着X吞吐量轴线的吞吐量,并且能够实现从拾取通道的一个共同经过中从共同拾取通道的有序的/已分拣的(例如,根据预定的负载输出顺序)两个或多个箱单元的多次拾取,如下面将描述的。例如,仍然参考图1B,储存层130L的一个区段SECB包括两个储存搁架1200、1210,其中,一个搁架具有Z1A的间距并且其他搁架具有Z1B的间距,其中,Z1A和Z1B彼此不同。该不同间距允许将具有不同高度的箱单元CUD、CUE放置在共同储存层130L上的彼此上下堆叠的堆体中。在其他方面中,间距Z1A、Z1B可以基本上是相同的。在该方面中,储存层130L包括具有三个储存搁架的另一储存区段SECA,其中,一个搁架具有Z1E的间距,一个储存搁架具有Z1D的间距,并且其他储存搁架具有Z1C的间距,其中,Z1E、Z1D和Z1C彼此不同。在其他方面中,间距Z1E、Z1D和Z1C中的至少两个是基本上相同的。在一个方面中,搁架之间的间距被设置成使得较大和/或较重的箱单元CUC、CUE相比于更小和/或更轻的箱单元CUD、CUA、CUB被设置成更靠近于甲板1200S。在其他方面中,搁架之间的间距被设置成使得箱单元被设置在可能或者可能不与线单元的大小和重量相关的任意合适位置中。
在其它方面中,至少一些货架搁架之间的竖直间距是相同的,使得至少一些搁架之间的高度Z1A-Z1E是相等的,而其它搁架之间的竖直间距是不同的。在另外的其它方面中,一个储存层上的货架搁架层130LS1-130LS4的间距是恒定间距(例如,货架搁架层在Z方向上基本上等距地间隔开),而不同储存层上的货架搁架层130LS1-130LS4的间距具有不同的恒定间距。
在一个方面中,在储存器或甲板层130L之间的由储存搁架层130LS1-130LS4限定的(多个)储存空间130S在不同搁架层130LS1-130LS4处容纳不同高度、长度、宽度和/或重量的箱单元,例如,如在2015年12月11日提交的美国非临时专利申请第14/966,978号、以及2014年12月12日提交的美国临时专利申请第62/091,162号中描述的,其公开内容全部以引用的方式并入本文。例如,仍参照图1B,储存层130L包括具有至少一个中间搁架1210的储存区段。在所示示例中,一个储存区段包括一个中间搁架1210,而另一储存区段包括两个中间搁架1210以形成搁架层130LS1-130LS4。在一个方面中,储存层130L之间的间距Z1可以是任意合适的间距,诸如例如,约32英寸至约34英寸,而在其它方面中,该间距可以大于约34英寸和/或小于约32英寸。可以在相邻的竖直堆叠的储存层130L的甲板1200S之间设置任意合适数量的搁架,其中,这些搁架在搁架之间具有相同的或者不同的间距(例如参见图1C,其中,箱单元CUD1、CUD2、CUE1-CUE3、CUF1、CUF2位于拾取通道的一侧上的竖直堆体中,并且箱单元CUA、CUB、CUC位于具有基本上相似间距的储存搁架上的拾取通道的相对侧上的竖直堆体中)。
在所公开的实施例的一个方面中,储存或者甲板层130L(例如,机器人110在其上行进的表面)设置在任意合适的预定间距Z1处,例如,该任意合适的预定间距Z1不是(多个)中间搁架间距Z1A-Z1E 的整数倍。在其它方面中,间距Z1可以是中间搁架间距的整数倍,诸如例如,搁架间距可以基本上等于间距Z1,从而使得对应的储存空间具有基本上等于间距Z1的高度。如可以意识到的,搁架间距Z1A-Z1E基本上与储存层130L间距Z1相分离并且与一般箱单元高度相对应,如图1B中所示。在所公开的实施例的一个方面中,不同高度的箱单元被动态地分配或者以其他方式沿着具有与箱单元重量相称的搁架高度的储存空间130S内的每个通道进行分布。储存层130L之间的剩余空间沿着与储存的箱单元一致的通道的长度(例如,在关于货架参考系REF2的X方向上,其中,该X方向在如机器人行进通过拾取通道130A的机器人参考系REF中相同)以及在储存的箱单元旁边能够自由地用于动态地分配具有对应高度的箱。如可以意识到的,将具有不同高度的箱单元动态地分配到具有不同间距的搁架上,这在每个拾取通道130A的两侧上的储存层130L之间提供不同高度的储存箱层,其中,每个箱单元沿着共同拾取通道130A被动态地分布,从而使得机器人能够在共同通道中独立地访问(例如,用于拾取/放置)每个储存箱层内的每个箱单元。箱单元的这种高密度放置/分配以及储存搁架的结构提供了储存层130L之间的最大效率的储存空间/体积使用,并且因此提供了货架模块阵列RMA的最大效率,箱单元SKU的分布得到优化,这是因为每个通道长度可以包括不同高度的多个箱单元,而在每个搁架层处的每个货架搁架可以通过动态分配/分布进行装填(例如,在长度、宽度、以及高度上装填三维货架模块阵列RMA空间以便提供高密度储存阵列)。
在一个方面中,参照图1E和图6A,每个储存层130L包括单层储存搁架以储存单层箱单元(例如,每个储存层包括单个箱单元支撑平面CUSP),并且机器人110被构造成将箱单元转移至相应储存层130L的储存搁架并且从其转出。例如,图6A中所图示的机器人110'基本上类似于本文中描述的机器人110,然而,机器人110'没有设置用于将箱单元放置在多个储存搁架层130LS1-130LS4上(例如,可从共同轨道1200S进行访问)的转移臂110PA的足够的Z向行程,如上文所描述的。在此,转移臂驱动器250(其可以基本上类似于驱动器250A和250B中一个或多个)仅仅包括用于从单层储存搁架的箱单元支撑平面CUSP升高箱单元,用于将箱单元往返转移至有效负载区110PL,以及用于在转移臂110PA的指状件273与有效负载床110PB之间转移箱单元的足够的Z向行程。可以在如下文件中找到机器人110'的合适示例:例如,2011年12月15日提交的美国专利申请第13/326,993号,其公开内容全部以引用的方式并入本文。
在所公开的实施例的一个方面中,同样参照图2A,货架搁架1210(包括由轨道1200形成的货架搁架)被纵向地划分为区段SECA、SECB(例如,在X 方向上沿着拾取通道130A的长度,相对于参考系REF2的储存结构框架)以便沿着每个拾取通道130A形成有序的或者以其他方式匹配的货架搁架区段。例如,通道搁架区段SECA、SECB基于横向经过通道的机器人110的拾取顺序来彼此排序/匹配,该机器人110在共同穿过时拾取共同订单装填命定的箱单元(例如,基于订单输出顺序)。换言之,机器人110向下单次通过单个或共同拾取通道(例如,在单个方向上横移),同时从拾取通道130A的共同侧上的通道搁架区段SECA、SECB拾取一个或多个箱单元以便在机器人110 上建立拾取面,其中,该拾取面包括根据订单装填/订单输出顺序设置在机器人上的箱单元,如下文将更加详细地描述的。每个通道货架区段SECA、SECB以上文描述的方式包括中间搁架。在其它方面中,一些通道搁架不包括中间搁架,而其它通道搁架则包括中间搁架。
在一个方面中,有序的通道货架区段SECA、SECB包括在区段SECA、SECB之间不同的搁架间距。例如,通道货架区段SECA具有带有间距一个或多个的搁架,而通道货架区段SECB具有带有一个或多个不同间距的搁架(例如,与区段SECA中的搁架间距不同)。根据所公开的实施例的各个方面,一个通道货架区段SECA、SECB的至少一个中间搁架的间距与共同拾取通道130A的另一有序通道货架区段SECA、SECB的至少一个中间搁架的间距相关。有序通道货架区段SECA、SECB中的中间搁架1210的不同间距被选择为相关并且使得利用机器人110根据混合SKU负载输出顺序(例如,码垛至共同货盘负载)而从不同间距的搁架上从共同拾取通道130A的共同通过中实现多次(至少两次)有序拾取(即,以有序顺序进行拾取)。如可以意识到的,来自储存和取回系统100的混合负载输出(例如,用于装填运输车负载端口/货盘负载)根据多个负载输出拾取通道(例如,拾取箱单元以转移至外出货盘的通道)按照预定顺序进行排序,并且有序区段SECA、SECB中的搁架间距有利于机器人110根据负载输出顺序的订单按照有序顺序在共同拾取通道通过时拾取多于一个箱单元(例如,在共同拾取通道的一次通过中按照预定顺序从共同拾取通道拾取多于一个箱单元)。有序货架区段SECA、SECB的不同通道搁架间距按照如下方式相关:增加这种有序多次拾取(如上面所述,利用单次通过通道而从单个通道拾取两个或者更多个箱单元)的可能性以使得通过沿着每个通道进行的每次机器人订单履行通过来执行该多次拾取,并且按照如下方式相关:使得在储存和取回系统100中由机器人110拾取的且运往共同负载输出(例如,共同货盘负载)的大多数以上的箱是由共同机器人110在共同拾取通道的单次通过期间以与负载输出顺序对应的有序顺序中拾取的(例如,由机器人110 拾取的两个或者更多个箱在单次通过中从相同拾取通道被拾取,例如,机器人在单个方向上一次行进通过拾取通道)。如可以意识到的,在所公开的实施例的一个方面中,拾取通道130A的两侧PAS1和PAS2具有有序的通道货架区段SECA、SECB,其中,一个有序区段可以与共同拾取通道130A 的相同侧PAS1和PAS2上的一个或多个区段相匹配。如可以意识到的,相匹配的通道货架区段可以被定位成彼此相邻或者沿着拾取通道130A彼此间隔分开。
再次参照图2A,每个转移甲板或者储存层130L包括一个或多个升降机拾取面对接/移交站TS(本文中称为对接站TS),其中,(单个拾取面或者组合拾取面的)(多个)箱单元或者装货物在升降机负载处理装置LHD与转移甲板130B上的机器人110之间转移。对接站TS位于与拾取通道130A和货架模块RM相对的转移甲板130B的一侧,使得转移甲板130B置于拾取通道与每个对接站TS之间。如上文指出的,在每个拾取层130L上的每个机器人110能够访问每个储存位置130S、每个拾取通道130A以及相应储存层130L上的每个升降机150,这样一来,每个机器人110也能够访问相应层130L上的每个对接站TS。在一个方面中,对接站沿着转移甲板130B与高速机器人行进路径HSTP偏移,使得机器人110对接站TS的访问对于高速行进路径HSTP上的机器人速度而言是非确定性的。这样一来,每个机器人110能够将(多个)箱单元(或者由机器人建立的拾取面,例如,一个或多个箱)从每个对接站TS移动至与甲板层相对应的每个储存空间130S,并且反之亦然。
在一个方面中,对接站TS被构造用于在机器人110与升降机150的负载处理装置LHD之间进行箱单元(和/或拾取面)的被动转移(例如,移交)(例如,对接站TS没有用于运输箱单元的移动部件),这将在下文进行更加详细的描述。例如,同样参照图2B,对接站TS和/或缓冲站BS包括转移货架搁架RTS的一个或多个堆叠层TL1和TL2(例如,以便利用机器人110相对于堆叠货架搁架RTS的升高能力),在一个方面中,转移货架搁架RTS基本上类似于上面描述的储存搁架(例如,分别由轨道1210和1200以及板条1210S形成),以使得按照基本上类似于机器人110与储存空间130S之间的(如本文所描述的)被动方式进行机器人110移交(例如,拾取和放置),其中,箱单元或者装货物被转移至搁架并从搁架转出。在一个方面中,一个或多个堆叠层TL1和TL2上的缓冲站BS也用作相对于升降机150的负载处理装置LHD的移交/对接站。在一个方面中,其中,机器人(诸如,机器人110')被构造用于将箱单元转移至储存搁架的单个层130L,对接站TS和/或缓冲站BS还包括单层转移货架搁架(其基本上类似于例如上文参照图1D所描述的储存层130L的储存货架搁架)。如可以意识到的,储存和取回系统的操作(其中,机器人110'在单层储存和转移搁架上服务)基本上类似于本文所描述的操作。如同样可以意识到的,负载处理装置LHD将箱单元(例如,各个箱单元或者拾取面)和装货物移交(例如,拾取和放置)至堆叠货架搁架RTS(和/或单层货架搁架)是按照基本上类似于机器人110与储存空间130S之间的(如本文所描述的)被动方式来进行,其中,箱单元或者装货物被转移至搁架以及从搁架转移箱单元或者装货物。在其它方面中,搁架可以包括转移臂(基本上类似于图6中示出的机器人110转移臂110PA,但当转移臂被并入到对接站TS搁架中时,Z方向移动可能被省略)以用于从机器人110和升降机150的负载处理装置LHD中的一个或多个拾取和放置箱单元或者装货物。例如,2010年4月9日提交的美国专利申请第12/757,354号中描述了具有主动转移臂的对接站的合适示例,其公开内容全部以引用的方式并入本文。
在一个方面中,机器人110相对于对接站TS的位置按照基本上类似于相对于储存空间130S的机器人位置而出现。例如,在一个方面中,机器人110相对于储存空间130S和对接站TS的位置按照基本上类似于在如下文献中描述的方式而出现:2011年12月15日提交的美国专利申请第13/327,035号(现在为美国专利第9,008,884号)、以及2012年9月10日提交的13/608,877(现在为美国专利第8,954,188号),其公开内容全部以引用的方式并入本文。例如,参照图1和图1D,机器人110包括一个或多个传感器110S,该一个或多个传感器110S检测板条1210S或置于轨道1200上/轨道1200中的定位部件130F(诸如,孔径、反射表面、RFID标签等)。板条和/或定位部件130F被设置成以便识别机器人110的在储存和取回系统内相对于例如储存空间和/或对接站TS的位置。在一个方面中,机器人110包括控制器110C,例如,该控制器110C对板条1210S进行计数以便至少部分地确定储存和取回系统100内的机器人110的位置。在其它方面中,定位部件130F可以设置成以便形成绝对或者增量式编码器,当由机器人110检测到时,该绝对或者增量编码器提供储存和取回系统100内的机器人110位置确定。
如可以意识到的,参照图2B,在每个对接/移交站TS处的转移货架搁架RTS在共同转移货架搁架RS上限定出多负载站(例如,具有用于保持对应数量的箱单元或者装货物的一个或多个储存箱单元保持位置)。如上文所指出的,多负载站的每个负载是由机器人或者负载处理装置LHD拾取和放置的单个箱单元/装货物或者多箱拾取面(例如,具有作为单个单元移动的多个箱单元/装货物)。如同样可以意识到的,上面描述的机器人位置允许机器人110本身相对于多负载站进行定位以用于从多负载站的保持位置中的预定位置处拾取和放置箱单元/装货物和拾取面。对接/移交站TS限定多位置缓冲器(例如,具有一个或多个箱保持位置的缓冲器-见图4-,例如当机器人与对接站TS对接时沿着机器人110的X轴线设置),其中,入站和/或出站箱单元/装货物和拾取面在机器人110与升降机150的负载处理装置LHD之间进行转移时临时地储存在该缓冲器处。
在一个方面中,一个或多个外围缓冲器/移交站BS(基本上类似于对接站TS并且在本文中称为缓冲站BS)也位于与拾取通道130A和货架模块RM相对的转移甲板130B的一侧,使得转移甲板130B置于拾取通道与每个缓冲站BS之间。外围缓冲站BS置于对接站TS之间或者(在一个方面中,如图2A和图2B中所示)如若不然与对接站TS成一条线。在一个方面中,外围缓冲站BS由轨道1210和1200以及板条1210S形成,并且是对接站TS的延续部分(但却是单独的区段)(例如,对接站和外围缓冲站由共同的轨道1210和1200形成)。这样一来,在一个方面中,外围缓冲站BS还包括转移货架搁架RTS的一个或多个堆叠层TL1和TL2(如上文参照对接站TS所描述的),而在其它方面中,缓冲站包括单层转移货架搁架。外围缓冲站BS限定缓冲站,其中,当从一个机器人110转移至相同储存层130L上的另一不同机器人110时,箱单元/装货物和/或拾取面临时地储存在该缓冲站处,如下文将更加详细的描述的。如可以意识到的,在一个方面中,外围缓冲站位于储存和取回系统的任意合适的位置处,包括在拾取通道130A内并且沿着转移甲板130B的任何地点。
仍参照图2A和图2B,在一个方面中,对接站TS按照类似于道路侧上的停车位的方式沿着转移甲板130B设置,从而使机器人110“并行停泊”在预定对接站TS处以用于将箱单元转移至对接站TS的一个或多个层TL1和TL2处的一个或多个搁架RTS以及从其转移箱单元。在一个方面中,(例如,当并行停泊)在对接站TS处的机器人110的转移方向与当机器人110沿着高速机器人运输路径HSTP行进时的方向相同(例如,对接站基本上与转移甲板的机器人行进方向和/或升降机150所位于的转移甲板的一侧平行)。机器人110与外围缓冲站BS对接也是通过并行停泊而进行的,从而机器人110(例如,当并行停泊)在外围缓冲站BS处时的转移方向是与当机器人110沿着高速机器人运输路径HSTP行进时的相同方向。
在另一方面中,参照图3A和图3B,至少对接站TS位于从转移甲板130B延伸的延伸部或者码头130BD上。在一个方面中,码头130BD类似于拾取通道,其中,机器人110沿着附接至水平支撑构件1200的轨道1200S行进(按照基本上类似于上文描述的方式)。在其它方面中,码头130BD的行进表面可以基本上类似于转移甲板130B的行进表面。每个码头130BD位于转移甲板130B的一侧,诸如,与拾取通道130A和货架模块RM相对的一侧,使得转移甲板130B置于拾取通道与每个码头130BD之间。(多个)码头130BD相对于高速机器人运输路径HSTP的至少一部分以非零角度从转移甲板延伸。在其它方面中,(多个)码头130BD从转移甲板130B的任意合适的部分(包括转移甲板130B的端部130BE1和130BE2)延伸。如可以意识到的,外围缓冲站BSD(基本上类似于上文描述的外围缓冲站BS)也可以位于至少沿着码头130BD的一部分。
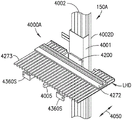
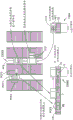
现在参照图4A、图4B和图5,如上文所描述的,在一个方面中,对接站TS是被动站,并且因而升降机150A和150B的负载转移装置LHD具有主动转移臂或者拾取头4000A和4000B。在一个方面中,入站升降机模块150A和出站升降机模块150B具有不同类型的拾取头(如下文将描述的),而在其它方面中,入站升降机模块150A和出站升降机模块150B具有相同类型的拾取头,类似于下文描述的其中一个拾取头(例如,升降机150A和150B均具有拾取头4000A,或者升降机150A和150B均具有拾取头4000B)。如本文中描述的,升降机150A、150B的拾取头可以至少部分地限定Y吞吐量轴线。在一个方面中,入站升降机模块150A和出站升降机模块150B均具有竖直桅杆4002,滑动件4001在任意合适的驱动单元4002D(例如,连接至例如控制服务器120)的动力下沿着该竖直桅杆4002行进,该驱动单元被构造成升高和降低该滑动件(以及安装至其的拾取头4000A、4000B)。(多个)入站升降机模块150A包括安装至滑动件4001的拾取头4000A使得当滑动件竖直移动时,拾取头4000A与滑动件4001一起竖直移动。在该方面中,拾取头4000A包括安装至基部构件4272的一个或多个尖头或者指状件4273。基部构件4272可移动地安装至框架4200的一个或多个轨道4360S,框架4200进而安装至滑动件4001。任意合适的驱动单元4005(诸如,带驱动器、链驱动器、螺纹驱动器、齿轮驱动器等)(其在形式上基本上类似于驱动器4002D,但在性能上可能不类似于驱动器4002D,因为驱动器4005可能小于驱动器4002D)安装至框架4200并且联接至基部构件4272以用于在箭头4050的方向上(例如,相对于升降机参考系REFL的Y方向)驱动基部构件4272(以及(多个)指状件)。
(多个)出站升降机模块150B还包括安装至滑动件4001的拾取头4000B,使得当滑动件竖直移动时,拾取头4000B与滑动件4001一起竖直移动。在该方面中,拾取头4000B包括一个或多个拾取头部分或者执行器(例如,转移臂)LHDA和LHDB,该一个或多个拾取头部分或者执行器分别具有安装至相应基部构件4272A的一个或多个尖头或者指状件4273。每个基部构件4272A可移动地安装至框架4200A的一个或多个轨道4360SA,框架4200A进而安装至滑动件4001。任意合适的驱动单元4005A(诸如,带驱动器、链驱动器、螺纹驱动器、齿轮驱动器等)安装至框架4200A并且联接至相应基部构件4272A以便在箭头4050的方向上驱动相应的基部构件4272A(以及指状件)(每个执行器具有相应的驱动单元,以便使每个执行器能够在箭头4050的方向上独立地移动)。尽管在拾取头4000B上图示了两个执行器LHDA和LHDB,但拾取头4000B包括例如与对接站TS的箱单元/拾取面保持位置的数量相当的任意合适数量的执行器,使得独立地从对接站TS拾取箱单元/拾取面,如下文更加详细的描述的。
如可以意识到的,升降机模块150A和150B处于任意合适控制器(诸如,控制服务器120)的控制下,从而当拾取和放置箱单元时,将拾取头升高和/或降低至与预定储存层130L处的对接站TS相对应的预定高度。如可以意识到的,升降机模块150A、150B提供储存和取回系统的Z吞吐量轴线(相对于机器人参考系REF以及货架参考系REF2),其中,输出升降机模块150B即时分拣箱单元以用于第送至输出站160US,如下面将描述的。在对接站TS处,拾取头4000A、4000B或者其各个部分(例如,执行器LHDA和LHDB)(与一个或多个箱单元被拾取的对接站TS处的一个或多个箱单元保持位置相对应)进行延伸以便使指状件4273在被拾取的箱单元下方的板条1210S之间相互交叉(如图4B中图示的)。升降机150A和150B升起拾取头4000A、4000B以便从板条1210S处升高箱单元,并且缩回拾取头4000A、4000B以将箱单元运输至储存和取回系统的另一层,诸如,以用于将箱单元运输至输出站160UT。类似地,为了放置一个或多个箱单元,拾取头4000A、4000B或者其各个部分(例如,执行器LHDA和LHDB)(与一个或多个箱单元被放置的对接站TS处的一个或多个箱单元保持位置相对应)进行延伸以便使指状件4273位于板条上方。升降机150A和150B降低拾取头4000A、4000B以便将箱单元放置在板条1210S上并且使得指状件4273在被拾取的箱单元下方的板条1210S之间相互交叉。
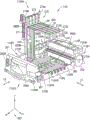
现在参照图6,如上文指出的,机器人110包括转移臂110PA,该转移臂110PA实现从至少部分地在Z方向上由一个或多个轨道1210A—1210C、1200限定出的堆叠储存空间130S、对接站TS、以及外围缓冲站BS和BSD处拾取和放置箱单元(例如,其中,该储存空间、对接站和/或外围缓冲站可以进一步在X和Y方向上相对于货架参考系REF2或者机器人参考系REF而通过箱单元的动态分配进行限定,如上文所描述的)。如可以意识到的,机器人限定X吞吐量轴线,并且至少部分地限定Y吞吐量轴线(例如,相对于机器人参考系REF),如下面将进一步描述的。如上文指出的,机器人110在每个升降机模块150与相应储存层130L上的每个储存空间130S之间运输箱单元。机器人110包括具有驱动区段110DR和有效负载区段110PL的框架110F。该驱动区段110DR包括分别连接至相应驱动轮202的一个或多个驱动轮电机,以用于沿着X方向(相对于机器人参考系REF)推进机器人110以便限定X吞吐量轴线。如可以意识到的,当机器人110行进通过拾取通道130A时,机器人行进的X轴线与储存位置一致。在该方面中,机器人110包括两个驱动轮202,该两个驱动轮202位于机器人110的相对侧上在机器人110的端部110E1(例如,第一纵向端部)上以用于将机器人110支撑在合适的驱动表面上,然而,在其它方面中,可以在机器人110上设置任意合适数量的驱动轮。在一个方面中,每个驱动轮202被独立地控制,从而使机器人110可以通过驱动轮202的差动旋转而行驶,而在其它方面中,驱动轮202的旋转可以被联接以便以基本上相同的速度旋转。任意合适的轮201在机器人110的相对侧上在机器人110的端部110E2(例如,第二纵向端部)处安装至框架以将机器人110支撑在驱动表面上。在一个方面中,轮201是脚轮,该脚轮自由地旋转从而允许机器人110通过驱动轮202的差动旋转而枢转以改变机器人110的行进方向。在其它方面中,轮201是可换向轮,该可换向轮在例如机器人控制器110C(该机器人控制器110C被构造成实现对如本文所描述的机器人110的控制)的控制下转动以改变机器人110的行进方向。在一个方面中,机器人110包括一个或多个导向轮110GW,例如,该一个或多个导向轮110GW位于框架110F的一个或多个角部处。导向轮110GW可以在转移甲板130B上和/或在对接或者转移站处与储存结构130(诸如,拾取通道130A内的导轨(未示出))对接以便与升降机模块150对接以引导机器人110和/或将机器人110定位成与一个或多个箱单元所放置和/或拾取的地点相距预定距离,例如,如在2011年12月15日提交的美国专利申请第13/326,423号中描述的,其公开内容全部以引用的方式并入本文。如上文所指出的,机器人110可以进入具有不同朝向方向的拾取通道130A以访问位于拾取通道130A的两侧上的储存空间130S。例如,机器人110可以利用引导行进方向的端部110E2进入拾取通道130A,或者机器人可以利用引导行进方向的端部110E1进入拾取通道130A。
机器人110的有效负载区段110PL包括有效负载床110PB、护栏或者基准构件110PF、转移臂110PA、以及推杆或者构件110PR。在一个方面中,有效负载床110PB包括一个或多个辊子110RL,该一个或多个辊子110RL(例如,相对于机器人110的纵向轴线LX)横向地安装至框架110F以便使有效负载区段110PL内承载的一个或多个箱单元能够沿着机器人的纵向轴线纵向地移动(例如,针对框架/有效负载区段的预定位置和/或一个或多个箱单元的参考基准进行排齐),例如,以便在有效负载区段110PL内和/或相对于有效负载区段110PL内的其它箱单元将箱单元定位在预定位置(例如,箱单元的纵向前/后排齐)。在一个方面中,辊子110RL可以由任意合适的电机进行驱动(例如,围绕其相应轴线旋转)以用于使箱单元在有效负载区段110PL内移动。在其它方面中,机器人110包括一个或多个可纵向移动的推杆(未示出)以在辊子110RL上推动箱单元以使箱单元移动至有效负载区段110PL内的预定位置。该可纵向移动的推杆可以大体上类似于例如在2011年12月15日提交的美国专利申请第13/326,952号中描述的推杆,其公开内容在之前全部以引用的方式并入本文。推杆110PR可在Y方向上相对于升降机参考系REF移动以便与护栏110PF和/或转移臂110PA的拾取头270一起按照下列文献中描述的方式实现在有效负载区110PL内对箱单元的侧向排齐:2015年1月23日提交的美国临时专利申请第62/107,135号,其在之前全部以引用的方式并入本文。
仍参照图6,箱单元利用转移臂110PA沿着Y吞吐量轴线被放置到有效负载床110PB上并且从有效负载床110PB上移除。转移臂110PA包括基本上位于有效负载区段110PL内的升降机构或者单元200,例如,如在2015年1月23日提交的美国临时专利申请第62/107,135号中描述的,其在之前全部以引用的方式并入本文。该升降机构200提供对机器人110承载的拾取面的粗略定位和精细定位,该拾取面待被竖直地升高到储存结构130中的位置中以用于将拾取面和/或单个箱单元拾取和/或放置至储存空间130S(例如,在机器人110所处的相应储存层130L上)。例如,升降机构200提供将箱单元拾取和放置在可从共同拾取通道或者对接站甲板1200S访问的多个升高的储存搁架层130LS1-130LS4处(例如,见图1B、图2B和图3B)。
升降机构200被构造使得执行组合机器人轴线移动(例如,推杆110PR、升降机构200、拾取头延伸部和前/后排齐机构(诸如,例如,上文所描述的可纵向移动的推杆)的基本上组合式同步移动),从而使得机器人处理不同/多个SKU或者多次拾取的有效负载。在一个方面中,升降机构200的致动独立于推杆110PR的致动,如下文将描述的。升降机构200与推杆110PR的分离提供了组合式拾取/放置顺序,从而实现减少的拾取/放置循环时间、增加的储存和取回系统吞吐量和/或如上文所描述的储存和取回系统的增加的密度。例如,升降机构200提供将箱单元拾取和放置在可从共同拾取通道和/或对接站甲板访问的多个升高的储存搁架层处,如上文所描述的。
升降机构可以按照任意合适的方式进行构造以便使机器人110的拾取头270沿着Z轴线双向地移动(例如,在Z方向上往复移动——见图6)。在一个方面中,升降机构包括桅杆200M,并且拾取头200按照任意合适的方式可移动地安装至该桅杆200M。该桅杆按照任意合适的方式可移动地安装至框架以便能够沿着机器人100的侧向轴线L/T移动(例如,在Y方向上以便限定Y吞吐量轴线)。在一个方面中,框架包括导轨210A和210B,桅杆200可滑动地安装至该导轨。转移臂驱动器250A和250B可以安装至该框架以便实现转移臂110PA的至少沿着侧向轴线LT(例如,Y轴线)和Z轴线的移动。在一个方面中,转移臂驱动器250A和250B包括延伸电机301和升降电机302。该延伸电机301可以按照任意合适的方式安装至框架110F并且联接至桅杆200M,诸如,通过带和滑轮传动装置260A、螺纹驱动传动装置(未示出)和/或齿轮驱动传动装置(未示出)。升降电机302可以通过任意合适的传动装置(诸如,通过带和滑轮传动装置271、螺纹驱动传动装置(未示出)和/或齿轮驱动传动装置(未示出))安装至桅杆200M和联接至拾取头270。作为示例,桅杆200M包括导向件,诸如,导轨280A和280B,拾取头270沿着该导轨安装以在Z方向上沿着该导轨280A和280B进行引导移动。在其它方面中,拾取头按照任意合适的方式安装至桅杆以在Z方向上进行引导移动。关于传动装置271,带和滑轮传动装置271的带271B固定地联接至拾取头270,使得当带271移动时(例如,由电机302驱动),拾取头270与带271一起移动并且在Z方向上沿着导轨280A和280B被双向地驱动。如可以意识到的,在采用螺杆驱动器来在Z方向上驱动拾取头270的情况下,螺母必须安装至拾取头270,以便在通过电机302使螺杆转动时,螺母与螺杆之间的接合使得拾取头270移动。类似地,在采用齿轮驱动传动装置的情况下,齿条和小齿轮或者任何其它合适的齿轮驱动器可以在Z方向上驱动拾取头270。在其它方面中,使用任意合适的线性致动器来使拾取头在Z方向上移动。用于延伸电机301的传动装置260A基本上类似于本文中参照传动装置271描述的内容。
仍参照图6,机器人110的拾取头270在机器人110与箱单元拾取/放置位置之间转移箱单元(诸如例如,储存空间130S、外围缓冲站BS和BSD和/或对接站TS(见图2A至图3B),以及在其它方面中基本上直接在机器人110与升降机模块150之间)。在一个方面中,拾取头270包括基部构件272、一个或多个尖头或者指状件273A-273E、以及一个或多个致动器274A和274B。基部构件272安装至桅杆200M,如上文所描述的,以便沿着导轨280A和280B行驶。一个或多个尖头273A-273E在该尖头273A-273E的近端安装至基部构件272以便使该尖头273A-273E的远端(例如,自由端)从基部构件272悬臂式伸出。再次参照图1D,尖头273A-273E被构造用于插入在板条1210S之间,该板条1210S形成储存搁架的箱单元支撑平面CUSP。
一个或多个尖头273A-273E可移动地安装至基部构件272(诸如,在滑轨/导轨上,类似于上文所描述的)以便可在Z方向上移动。在一个方面中,任意数量的尖头安装至基部构件272,而在附图中所图示的方面中,例如,存在五个尖头273A-273E安装至基部构件272。任意数量的尖头273A-273E可移动地安装至基部构件272,而在附图中所图示的方面中,例如,(相对于拾取头270的中心线CL的)最外尖头273A和273E可移动地安装至基部构件272,而剩余尖头273B-273D相对于基部构件272不可移动。
在该方面中,拾取头270采用少至三个尖头273B-273D来将较小尺寸的箱单元(和/或箱单元组)转移至机器人110和从机器人110转移,并且采用多达五个尖头273A-273E来将较大尺寸的箱单元(或者箱单元组)转移至机器人110和从机器人110转移。在其它方面中,采用少于三个尖头(例如,诸如,在多于两个尖头可移动地安装至基部构件272的情况下)来转移较小尺寸的箱单元。例如,在一个方面中,除了一个之外的所有尖头273A-273E均可移动地安装至基部构件,以使得最小的箱单元被转移至机器人110和从机器人110转移,而不干扰例如位于具有约板条1210S之间的距离X1(见图1D)的宽度的储存搁架上的其它箱单元。
不可移动的尖头373B-373D限定拾取头270的拾取平面SP,并且在转移所有大小的箱单元(和/或拾取面)时使用该不可移动的尖头373B-373D,而可移动的尖头373A和373E相对于不可移动的尖头373B-373D被选择性地升起和降低(例如,利用致动器274A和274B在Z方向上)以便转移较大的箱单元(和/或拾取面)。仍参照图6,其示出了示例,其中,所有尖头273A-273E均被定位成使得每个尖头273A-273E的箱单元支撑表面SF与拾取头270的拾取平面SP一致,然而,如可以意识到的,两个端部尖头273A和273E是可移动的以便相对于其它尖头273B-273D定位地更低(例如,在Z方向上),以使得尖头273A和273E的箱单元支撑表面SF偏离拾取平面SP(例如,在下方),以使得尖头273A和273E不与拾取头270承载的一个或多个箱单元接触并且不会干扰定位在储存搁架上的储存空间130S中或任意其它合适的箱单元保持位置处的任意未拾取的箱单元。
尖头273A-273E在Z方向上的移动通过安装在转移臂110PA的任意合适位置处的一个或多个致动器274A和274B实现。在一个方面中,该一个或多个致动器274A和274B安装至拾取头270的基部构件272。该一个或多个致动器是能够使一个或多个尖头273A-273E在Z方向上移动的任意合适的致动器,诸如,线性致动器。例如,在图6中所示的方面中,每个可移动尖头273A和273E具有一个致动器274A和274B以使得每个可移动尖头能够在Z方向上独立地移动。在其它方面中,一个致动器可以联接至多于一个的可移动尖头以使得该多于一个的可移动尖头作为整体在Z方向上移动。
如可以意识到的,在拾取头270的基部构件272上可移动地安装的一个或多个尖头273A-273E提供对拾取头270上的大的箱单元和/或拾取面的完全支撑,同时还提供在不干扰定位在例如储存搁架、对接站和/或外围缓冲站上的其它箱单元的情况下拾取和放置小的箱单元的能力。在不干扰储存搁架、对接站和/或外围缓冲站上的其它箱单元的情况下拾取和放置可变尺寸的箱单元的能力减小了储存搁架上的箱单元之间的间隙GP(见图1B)的尺寸。如可以意识到的,由于尖头273B-273D固定至基部构件272,所以当拾取/放置箱单元时不存在重复运动,因为将箱单元和/或拾取面升高至箱单元保持位置和从箱单元保持位置降低仅仅由升降电机301和301A实现。
再次参照图6,要再次注意的是,推杆110PR能够独立于转移臂110PA移动。推杆110PR按照任意合适的方式(诸如例如,通过导杆和滑动结构)可移动地安装至框架,并且沿着Y方向被致动(例如,在基本上平行于转移臂110PA的延伸/缩回方向的方向上)。在一个方面中,至少一个导杆360安装在有效负载区段110PL内,以便相对于框架110F的纵向轴线LX横向地延伸。推杆110PR可以包括至少一个滑动构件360S,该至少一个滑动构件360S被构造成与相应导杆360接合并且沿着相应导杆360滑动。在一个方面中,至少该导杆/滑动结构使推杆110PR保持在有效负载区段110PL内。该推杆110PR由任意合适的电机和传动装置致动(诸如,由电机303和传动装置303T致动)。在一个方面中,电机303是旋转电机,并且该传动装置303T是带和滑轮传动装置。在其它方面中,推杆110PR可以由基本上不具有旋转部件的线性致动器致动。
推杆110PR设置在有效负载区段110PL内以便基本上垂直于辊子110RL,并且使得推杆110PR不与拾取头270干涉。如能够在图10B中看到的,机器人110处于运输构造中,其中,至少一个箱单元将被支撑在辊子110RL(例如,共同形成有效负载床的辊子)上。在该运输构造中,拾取头270的尖头273A-273E与辊子110RL互相交叉并且(沿着Z方向)定位在辊子110RL的箱单元支撑平面RSP(见图10)下方。推杆110PR构造有槽351(图10C),尖头273A-273E在该槽351中穿过,其中,在该槽351内设有充足的间隙以便允许尖头在箱单元支撑平面RSP下方移动并且允许推杆110PR在不干涉尖头273A-273E的情况下自由移动。推杆110PR还包括一个或多个孔径,辊子110RL穿过该一个或多个孔径,其中,该孔径的大小被设置成允许辊子围绕其相应轴线自由旋转。如可以意识到的,可独立操作的推杆110PR不会干涉辊子110PR、转移臂110PA在横向方向(例如,Y方向)上的延伸以及拾取头270的升高/降低。
如上文所指出的,由于推杆110PR是在不受拾取头270延伸和升降轴线干扰的情况下操作的机器人110的单独的独立式轴线,所以该推杆110PR能够与转移臂110PA、LHDA、LHDB的升降和/或延伸基本上同时操作。该组合式轴线移动(例如,推杆110PR与转移臂110PA延伸和/或升降轴线的同时移动)提供沿着Y吞吐量轴线的增加的有效负载处理吞吐量并且实现在拾取通道的一次共同经过中从共同拾取通道进行的两个或者更多个箱单元的有序的(例如,根据预定负载输出顺序)多次拾取。例如,参照图10至图10A,在转移臂110PA多次拾取/放置顺序期间,将推杆110PR预先定位(在箱单元和/或拾取面被拾取和转移到有效负载区段110PL中时)至与接触深度X3(例如,箱单元和/或拾取面CU在从储存空间或者其它箱单元保持位置被拾取/放置时所占据的尖头的深度)相距预定距离X2的位置(图14,框1100)。该距离X2是仅仅允许在推杆110PR与箱单元之间具有充足间隙以允许箱单元置于辊子110RL上的最小化距离。在箱单元CU、7下降到辊子110RL(图14,框1110)时,推杆110PR为了与箱单元CU接触所行进的距离在与从有效负载区段110PL的后侧402(相对于侧向Y方向以及有效负载区段110PL的访问侧401)移动的距离X4(如常规运输车辆所行进的)相比是更短的距离X2。当箱单元CU由转移臂110PA降低并且转移至辊子110RL以便仅仅由辊子110RL支撑时,推杆110PR被致动以便向前(相对于侧向方向和有效负载区段110PL、的访问侧401)排齐箱单元CU(图14,框1120)。例如,推杆110PR可以在Y方向上侧向地推动箱单元CU,以便使箱单元与护栏110PF接触,该护栏110PF位于有效负载区段110PL的访问侧401处,从而可以通过箱单元CU与护栏110PF之间的接触来形成箱单元参考基准。在一个方面中,推杆110PR可以在箱单元的运输期间与箱单元C接合或者如若不然夹持箱单元CU(例如,以便保持箱单元抵靠护栏110PF),以用于使箱单元CU维持与彼此以及机器人110的参考系REF(图6)的预定空间关系(图14,框1130)。当放置箱单元时,推杆110PR在排齐箱单元CU抵靠护栏110PF之后(例如,在Y方向上)从与箱单元CU的接触中撤回(图14,框1140)。基本上紧接着推杆110PR与箱单元CU断开接合之后,转移臂110PA的一个或多个升降轴线(例如,在Z方向上)和延伸轴线(例如,在Y方向上)与推杆110PR的撤回移动大体上同时致动(图14,框1150)。在一个方面中,当推杆从与箱单元CU的接触中撤回时,升降轴线和延伸轴线均被致动,而在其它方面中,升降轴线和延伸轴线中的一个被致动。如可以意识到的,转移臂110PA升降轴线和/或延伸轴线与推杆110PR的撤回的同时移动以及推杆为了排齐箱单元CU所移动的减小的距离减少了将箱单元CU转移至机器人110以及从机器人110转移箱单元CU所需要的时间并且增加了储存和取回系统100的吞吐量。
如本文中描述的,参照图2A、图2B和图12,机器人110被构造成在拾取通道130A与转移/移交站TS和缓冲站BS之间运输拾取面。在一个方面中,控制服务器120被构造成命令机器人110,并且利用机器人110实现箱顺序的出站流动分拣(其也可以被称为订单履行流,出站流或者订单履行),其独立于通过机器人110从储存区拾取形成拾取面的箱的顺序。在一个方面中,机器人控制器110C被构造成命令机器人110,并且利用机器人110来实现箱订单的出站流动分拣,其独立于通过机器人110从储存区拾取形成拾取面的箱的顺序。在其它方面中,控制服务器120和机器人控制器110C均被构造成命令机器人110,并且利用机器人110来实现箱订单的出站流动分拣,其独立于通过机器人110从储存区拾取形成拾取面的箱的顺序。因此,控制服务器120和/或机器人控制器110C被构造成能够至少部分地利用机器人110来设定由机器人110共同承载的且与通过机器人110从储存处拾取箱的顺序相分离的箱的出站箱流动分拣。如可以意识到的,在一个方面中,每个机器人110被构造成在第一拾取面对接站(例如,转移/移交站TS和/或缓冲站BS)和第二拾取面对接站(例如,与第一拾取面对接站间隔分开的转移/移交站TS和/或缓冲站BS)之间运输拾取面,其中,如本文中描述的,机器人110从第一对接站拾取第一拾取面,横向经过转移甲板130B并且在第二拾取面对接位置(或者至少其上的一部分)处放置/缓冲第一拾取面,使得第二拾取面对接站具有按照拾取面的有序顺序缓冲在共同支撑件/表面CS上的多个拾取面该有序顺序是根据混合箱拾取面的预定的箱输出有序顺序。如下文将描述的,机器人110被构造成从拾取通道130A(或者转移站TS或者缓冲站BS)转移第一拾取面PCF1(该第一拾取面PCF1中具有任意合适数量的箱单元)并且将不同于第一拾取面PCF1的第二拾取面PCF2放置到对于机器人110和升降机150B共同的转移/移交站TS(或者缓冲站BS)的(诸如,货架搁架RTS的)共同表面CS上。为了描述目的,这可以称为利用机器人在转移站处(和/或在缓冲站处)进行的出站流动分拣。如下文还将描述的,在一个方面中,第一拾取面和第二拾取面具有对于第一拾取面和第二拾取面两者共同的至少一个箱单元。在一个方面中,如本文所描述的,机器人110被构造成例如在从第一拾取位置横移期间(例如,在机器人移动的同时)即时在拾取通道130A中建立第一拾取面(例如,多个拾取面中的至少一个)以便以多次拾取/放置顺序将第二拾取面放置在转移/移交站TS(或者缓冲站BS)处。在另一方面中,机器人110被构造成例如在从第一拾取位置到转移/移交站TS(或者缓冲站BS)的横向移动期间(例如,当机器人静止处于第二拾取面对接站或者第二拾取面对接站缓冲器)即时建立第一拾取面(例如,放置在共同表面CS上的多个拾取面中的至少一个)。如可以意识到的,在拾取面例如被机器人110从第一拾取面对接站(诸如,转移站TS或者缓冲站BS)拾取并且被放置在第二拾取面对接站处(诸如,另一个转移站TS或者缓冲站BS),拾取面绕过储存器(例如,在递送至第二拾取面对接站之前没有放置在储存空间130S中),在其他方面中,在由机器人110运输至第二拾取面对接站之前,从第一拾取面对接站拾取的拾取面的至少一部分放置在储存空间130S中(例如,在储存货架阵列RMA)中。在一个方面中,从入站转移站TS(或者缓冲站BS)拾取的拾取面可以与放置在出站转移站TS(或者缓冲站BS)处的拾取面相同(即,该拾取面在从入站转移站TS/缓冲站BS和出站转移站TS/缓冲站BS的运输期间没有被分解,其中,在入站和出站站之间的运输可以包括或者可以不包括将拾取面放置在储存器中)。
机器人110的控制器110C被构造成实现第一拾取面(或者由机器人110拾取的任意其它拾取面)的即时建立。在一个方面中,如在本文中描述的,机器人110被构造成诸如例如在有效负载区段建立机器人110上的拾取面,其中,箱单元/拾取面被机器人拾取并且按照预定顺序或者序列放置在有效负载区段中。在一个方面中,机器人110也被构造成拾取/建立不同于第一拾取面PCF1的拾取面PCF3并且将该不同的拾取面PCF3放置在转移/移交站TS(或者缓冲站BS)的搁架上(诸如,堆叠在形成共同表面CS的货架搁架上方或者下方的另一货架搁架RTS)。机器人110包括箱操纵,如本文所描述的。机器人已经拾取了第一拾取面PCF1并且被构造成进一步从货架搁架RTS(或者诸如拾取通道中的储存搁架等其它位置)拾取来自一个或多个箱单元(形成不同的拾取面PCF3)的第二拾取面PCF2,并且将不同的拾取面PCF3放置在共同表面CS上。如可以意识到的,在一个方面中,升降机150B被构造成从转移/移交站TS拾取第二拾取面PCF2。在其它方面中,如本文所描述的,升降机150被构造成从转移/移交站TS(或者缓冲站BS)的共同表面CS(诸如,货架转移搁架RTS)拾取第三拾取面PCF4,其中,该第三拾取面PCF4不同于第一拾取面PCF1和第二拾取面PCF2,并且共同箱对于第一拾取面PCF1、第二拾取面PCF2以及第三拾取面PCF4是共同的。如可以意识到的,第二对接站(诸如转移站TS或者缓冲站BS)形成共同拾取面转移对接升降机150,使得共同支撑的拾取面与升降机150一起被拾取。要注意的是,如上面提到的,升降机150从不同甲板层拾取各个拾取面的能力在Z吞吐量轴线上实现拾取面的分拣。
在所公开的实施例的一个方面中,如可以意识到的,在多次拾取/放置顺序中,多个箱单元基本上同时地被承载和操纵在机器人110或者升降机150的有效负载区段110PL、4110PL内(例如,以便形成一个或多个拾取面)以便进一步增加储存和取回系统100的吞吐量并且根据预定订单输出顺序实现多次拾取/放置顺序。同样参照图1,机器人接收例如来自控制服务器120(和/或仓库管理系统2500)的拾取和放置命令,并且机器人控制器110C执行这些命令以用于形成有序的多次拾取。在此,机器人110从例如转移甲板130B进入共同通道130A1以进行单次或者共同穿过拾取通道130A1,在此期间,机器人110根据预定订单输出顺序拾取两个或者更多个箱单元(图15,框1201A。在一个方面中,对箱单元CU的操纵是分拣箱单元(换言之,根据预定负载输出顺序拾取和放置箱单元),其中,箱被定位在转移臂110PA上以用于拾取/放置箱单元和/或被定位成使得该箱单元不被转移并且保持在转移臂110PA上,而其它箱单元则被转移至转移臂110PA以及从其转移箱单元。在此,机器人110根据预定的订单输出顺序在箭头XC的方向上行进通过共同拾取通道130A1并且在预定的储存空间130S1处停止,其中,机器人110利用共同转移臂110PA从预定储存空间130S1拾取一个或多个箱单元,其中,箱单元在共同转移臂110PA上的放置与预定的订单输出顺序相对应,如下文将更加详细地描述的(例如,箱单元被即时分拣,例如,在利用机器人110运输期间)。
作为机器人110上的箱操纵的示例,同样参照图10B至图10E,箱单元CUA可以从箱单元保持位置处被拾取(例如,诸如,在共同拾取通道中从储存空间130S拾取以用于实现有序的多次拾取,并且在其它方面中,从升降对接站TS和/或位于拾取通道中或转移甲板上的箱单元缓冲站拾取)并且被转移到有效负载区段110PL中(图15,框1201B)。在箱单元CUA被转移到有效负载区段110PL中时,推杆110PR可以被预定位(图15,框1204)成与护栏110PF相邻,从而当箱单元CUA降低以转移至辊子110RL时将推杆110PR定位在箱单元CUA与护栏110PF之间(图15,框1205)。推杆110PR被致动以在Y方向上朝着有效负载区段110PL的背部(例如,后部)402推动箱单元CUA(置于辊子110RL上),以便使箱单元CUA与尖头273A-273E的排齐表面273JS(图10)接触并且被排齐至有效负载区段110PL的背部402(图15,框1210)。
在一个方面中,机器人110继续在相同方向XC上横移经过共同拾取通道130A1(例如,使得利用在单个方向上行进的机器人110在拾取通道的共同穿过中拾取有序的多次拾取中的所有箱单元)并且根据预定的订单输出顺序停止在另一预定储存空间130S处。如上文所指出的,在箱单元保持位置之间运输箱单元期间,推杆110PR保持与箱单元CUA接触(例如,夹持),以便使箱单元CUA保持在有效负载区段110PL的背部402处的预定位置中(和/或相对于机器人110的参考系REF的纵向预定位置处)(图15,框1215)。例如,为了从共同拾取通道130A1的其它储存空间130S2拾取随后的箱单元,推杆110PR在Y方向上移动以与箱单元CUA断开接合,并且转移臂110PA的升降轴线和延伸轴线被致动以从其它储存空间130S2取回另一箱单元CUB(或者在其它方面中,例如,从如上文指出的升降移交对接站TS和/或缓冲/移交站BS)(图15,框1220)。在箱单元CUB被拾取的同时,推杆110PR在Y方向上被定位成与有效负载区段110PL的背部402相邻,以便位于箱单元CUA与尖头273A-273E的排齐表面273JS之间(图15,框1225)。箱单元CUB被转移到有效负载区段中并且被降低/放置在辊子110RL上(图15,框1230),以便使箱单元CUA和CUB相对于彼此沿着Y轴线进行设置。推杆110PR在Y方向上被致动以便朝着护栏110PF推动箱单元CUA和CUB以用于向前排齐箱单元CUA和CUB(图15,框1234),并且夹持/保持箱单元CUA和CUB以用于运输(图15,框1235)。如可以意识到的,在一个方面中,箱单元CUA和CUB作为整体被放置在箱单元保持位置处,而在其它方面中,箱单元CUA和CUB被分拣,例如,被运输至并且被放置在共同箱单元保持位置的单独位置处或者在不同的箱单元保持位置处(图15,框1240),如下文将更加详细地描述的。例如,同样参照图7至图9,承载有序的多次拾取有效负载的机器人110将有序的多次拾取的箱单元转移至对应于输出升降机150B1和150B2的一个或多个对接站TS处(其包括缓冲搁架7000A-7000L)。
如可以意识到的,在一个方面中,其中,机器人 110“并行停泊”到对接站TS中(图7)或者转至码头130BD中(图8),在转移甲板130B的高速机器人行进路径HSTP上行进的机器人之间(图2A)的间隔使得与对接站TS对接的机器人能够减速并且进入对接站TS中,而基本上不会受到沿着转移甲板130B行进的另一机器人110的干扰和/或不会干扰该另一机器人110。在其它方面中,由于如上文所描述的转移甲板130B基本上是开放的并且被构造用于机器人110跨过和沿着转移甲板130B的非确定性横移,所以在转移甲板上行进的机器人可以在进入对接站中的机器人周围行驶。在多次拾取的箱单元被放置在例如升降机150B1和150B2的对接/转移站的共同缓冲搁架7000A-7000L的不同位置处的情况下,机器人110将第一个箱单元CUB(与图9中的用于示例性目的拾取面7相对应,在该示例中其包括单个箱单元)放置在缓冲搁架7000B的第一位置中,并且将第二个箱单元CUA(与图9中的用于示例性目的拾取面5相对应,在该示例中其包括单个箱单元)放置在缓冲搁架7000B的第二位置中。在多次拾取的箱单元被放置在共同箱单元保持位置处的情况下,机器人110将两个箱单元CUA和CUB作为整体(例如,拾取面)放置在例如缓冲搁架7000A的共同位置处(与图9中用于示例性目的拾取面9相对应,其在该示例中包括两个箱单元)。
在箱单元CUA和CUB被分拣(图15,框1250)以用于放置在共同箱单元保持位置的单独位置处或者在不同箱单元保持位置处的情况下,箱单元CUA和CUB在有效负载区段110PL中与彼此隔开。例如,转移臂110PA的拾取头270可以在Z方向上移动以从辊子110RL处升高箱单元CUA和CUB,所升高的量足以允许推杆110PR在箱单元下方穿过(图16,框1250A)。在箱单元CUA和CUB被升高时,推杆110PR沿着Y方向定位以便位于箱单元CUA和CUB之间(见图10E)(图16,框1250B)。拾取头270被降低以便使箱单元CUA和CUB被转移至辊子110RL并且使得推杆110PR插入在箱单元CUA和CUB之间(图16,框1250C)。推杆110PR在Y方向上移动(例如,以便使箱单元隔开)从而使箱单元CUA朝着有效负载区段110PL的背部402移动(例如,抵靠尖头273A-273E的排齐表面273JS或者任何其它合适的位置),而箱单元CUB则保持在有效负载区段110PL的前部,与护栏110PF相邻(例如,如图10C中示出的)(图16,框1250D)。如可以意识到的,在箱单元在运输期间被保持为抵靠尖头的调排齐表面273JS的情况下,推杆在Y方向上移动(例如,以使箱单元隔开)从而使箱单元CUB朝着有效负载区段110PL的前部401移动(例如,抵靠护栏110PF或者任何其它合适的位置),而箱单元CUA则保持在有效负载区段110PL的背部,与排齐表面273JS相邻。推杆110PR也可以在Y方向上移动以便抵靠护栏110PF重新排齐箱单元CUB从而将箱单元定位在尖头273A-273E上以用于放置在箱单元保持位置处(图16,框1250E)。如可以意识到的,在箱单元CUA被定位成基本上抵靠(例如,拾取头270的)尖头273A-273E的排齐表面273JS的情况下,箱单元CUB可以在基本上不受箱单元CUA的干扰的情况下被放置在箱单元保持位置处(图16,框1250F),例如,箱单元CUA不与设置在箱单元保持位置处的箱单元接触。箱单元CUA被降低/转移回到有效负载区段110PL中(例如,通过缩回和降低转移臂110PA)(图16,框1250G)。预先定位在排齐表面273JS与箱单元CUA之间的推杆110PR抵靠护栏110PF推动箱单元CUA(其设置在辊子110RL上)以便向前排齐箱单元CUA以用于放置在另一箱单元保持位置处(例如,不同于放置箱单元CUB的保持位置)(图16,框1250H)。推杆110PR保持抵靠箱单元CUA以用于在运输期间将箱单元夹持(例如,利用护栏)至其它箱单元保持位置(图16,框1250I)。推杆110PR移动远离箱单元CUA并且转移臂被致动以升高和延伸拾取头270以用于将箱单元CUA放置在其它箱单元保持位置处(图16,框1250J)。
机器人110箱单元转移处理的示例包括箱单元多次拾取和放置操作以及箱单元的即时分拣以用于创建混合货盘负载MPL(如图1F中示出的)和/或在操作者站160EP处根据预定的订单输出顺序将预定输出顺序的拾取物品填充至一个或多个袋子、装货物或者其它容器TOT中(如图26中示出的,诸如例如,填充客户订单),如将根据所公开的实施例的各个方面针对图9和图11至图13进行描述的。例如,参照图11,客户订单可以要求将箱单元7递送至输出升降机150B1并且同样将箱单元5递送至输出升降机150B1(在其它方面中,要注意的是,客户订单可以要求将共同机器人110承载的箱单元递送至不同的输出升降机150B1和150B2(图9),使得按照基本上类似于本文中描述的方式来将由共同机器人110承载的箱单元转移至不同的输出升降机)。在本文所描述的所公开的实施例的方面中,输出升降机150B1(例如,储存和取回系统/订单履行系统的输出升降机150B1和150B2中的每一个)限定从储存阵列出站至负载填充的混合箱拾取面的履行进程或者路径(也被称为流),其中,混合箱拾取面按照基本上相同的顺序进入和离开履行进程。如可以意识到的,尽管输入升降机150A和输出升降机150B被描述为竖直往复升降机,但应理解的是,在其它方面中,输入升降机150A和输出升降机150B是用于将箱拾取面往返运输至储存结构130的任意合适的运输模块(例如,在相应的拾取面对接站之间,诸如,转移站TS或者缓冲站BS,以及例如输入单元的输入站和160IN例如负载填充区段/单元的输出站160UT中的相应一个)。例如,在其它方面中,升降机模块150A和150B是下述内容中的一个或多个:竖直往复升降机、任意合适的自动化物料处理系统、输送器、机器人、转盘、辊床、同时地或者不同时地操作的多层竖直输送器(例如,链斗式输送器)。为了有效地使用储存和取回系统100中的每个机器人110,控制器(诸如,控制服务器120)确定箱单元5和7位于哪些拾取通道上。控制器还确定哪些入站箱单元CU待被储存在待拾取箱单元5和7(例如,出站箱单元)的拾取通道中。控制器将命令发送至箱单元5和7所在的层上的机器人110以便按照类似于上文所描述的方式从一个或多个升降机模块150A的对接站TS拾取一个或多个入站箱单元ICU(图17,框1400A)。机器人110夹持箱单元ICU(图17,框1420)并且将箱单元运输至一个或多个拾取通道130A2内的一个或多个储存空间130(图17,框1421),其中,入站箱单元所放置的至少一个拾取通道包括出站箱单元5和7中的一个。如可以意识到的,其中,入站箱单元被放置在不同的储存位置130S处,如上文所描述的那样对入站箱单元进行分拣(图17,框1425),其中,将一个或多个箱单元转移至一个箱单元保持位置(诸如,储存空间130S或者缓冲器)(图17,框1430),而未被转移的箱单元则返回至机器人110的有效负载区段以用于转移至另一箱单元保持位置(图17,框1435)。
如可以意识到的,出站箱单元5和7位于相同的或者不同的拾取通道中并且由一个机器人110或者不同的机器人110取回,这取决于出站箱单元与入站箱单元的预定储存位置的距离。例如,参照图11,机器人110从升降机模块150A的对接站TS拾取入站箱单元ICU以用于放置在拾取通道130A2中(按照基本上类似于上文所描述的方式),该拾取通道130A2是箱单元5所处的通道。在该示例中,箱单元7位于拾取通道130A1中。在放置入站箱单元ICU之后,机器人继续在共同经过中(例如,拾取通道在单个方向上的单次横移)沿着拾取通道130A2行进以便拾取出站箱单元5(图17,框1400)。在让单个机器人110拾取多个箱单元更加有效的情况下,如上文所描述的在机器人110上排齐出站箱单元5(图17,框1405)并且机器人行进至另一箱单元的位置,诸如,通道130A1中的出站箱单元7(要注意的是,在第二出站箱位于具有第一出站箱的共同通道中的情况下,利用机器人110的共同转移臂110PA(图6)在拾取通道的共同经过中拾取这两个出站箱单元)。利用共同转移臂110PA来拾取第二出站箱单元7(图17,框1410),并且按照基本上类似于上文关于入站箱单元的放置所描述的方式将两个箱单元5和7转移和放置在拾取面运输系统(诸如,升降机模块150B)的外围缓冲站BS和对接站TS中的一个或多个处(图17,框1420-1435)。在让两个不同的机器人110在拾取了相应出站箱之后拾取箱单元5和7中的相应一个更加有效的情况下(图17,框1400),夹持箱单元(图17,框1420)并且将其转移至和放置在出站升降机150B的外围缓冲站BS或者对接站TS中的一个处(图17,框1421-1435),如本文所描述的。在一个方面中,在出站箱单元(诸如,箱单元5)被放置在外围缓冲站BS处的情况下,不同于将箱单元5放置在外围缓冲站BS处的机器人的机器人将箱单元5转移至对接站TS,而在其它方面中,相同的机器人110返回至外围缓冲站BS以将箱单元5转移至对接站TS。在本文所描述的所公开的实施例的方面中,缓冲站BS和/或转移站TS(例如,至少一个拾取面移交站)共同地支撑多于一个混合箱拾取面,其限定基于负载填充的预定顺序按照有序顺序的拾取面从进入履行进程的储存阵列/结构130出站出的混合箱拾取面的一部分。在本文所描述的所公开的实施例的一个或多个方面中,缓冲站BS和/或转移站TS形成用于出站升降机150B1的共同拾取面转移接口,从而利用出站升降机150B1来共同地拾取共同支撑的拾取面。在本文所描述的所公开的实施例的一个或多个方面中,缓冲站BS和/或转移站TS中的每一个共同地支撑多于一个的混合箱拾取面,该多于一个的混合箱拾取面限定按照基于负载填充的预定顺序的拾取面的有序顺序从储存阵列出站出的混合箱拾取面的一部分(仅仅用于示例性目的,见图9中的拾取面1-4)。在本文所描述的所公开的实施例的一个或多个方面中,混合箱拾取面(其限定按照有序顺序从储存阵列/结构130出站出的且被共同地支撑在缓冲站BS和/或转移站TS上的混合箱拾取面的一部分)是基于另一履行进程的另一缓冲站BS和/或转移站TS上的有序顺序的拾取面(例如,见从出站升降机150B2出站出的混合箱)。在所公开的实施例的一个或多个方面中,任意合适的控制器(诸如,控制器120)与机器人110通信并且被构造成实现基于有序顺序的拾取面将拾取面放置在缓冲站BS和/或转移站TS上。
在一个方面中,出站箱单元作为整体(例如,拾取面)由机器人110的共同转移臂110PA(图6)拾取和转移。现在再次参照图12,客户订单可以要求将箱单元7递送至输出升降机150B1并且也将箱单元5递送至输出升降机150B1(在其它方面中,要注意的是,客户订单可以要求将共同机器人110承载的箱单元递送至不同的输出升降机150B1和150B2(图9),使得按照基本上类似于本文中描述的方式来将由共同机器人110承载的箱单元转移至不同的输出升降机)。如上文所描述的,控制器确定哪些入站箱单元ICU待被储存在待拾取箱单元5和7(例如,出站箱单元)的拾取通道中。控制器将命令发送至箱单元5和7所在的层上的机器人110以便按照类似于上文所描述的方式从升降机模块150A的对接站TS拾取作为整体(例如,拾取面)的一个或多个入站箱单元ICU(图17,框1400A)。机器人110夹持拾取面PF1(图17,框1420),将拾取面PF1运输至出站箱单元5和7所处的拾取通道130A2内的储存空间130(图17,框1421),并且将拾取面PF1放置到储存空间130S中(图17,框1430)。要注意的是,由于整个拾取面都被转移至共同储存空间并且没有箱单元留在机器人上,所以在该示例中,该流动不会前进至图17的框1435。
在放置入站拾取面PF1之后,机器人110继续在共同经过中(例如,拾取通道在单个方向上的单次横移)通过通道130A2行进至储存空间,从而保持出站箱单元5和7(该出站箱单元5和7设置在彼此相邻的储存搁架上以便作为出站拾取面PF2同时被拾取)。机器人110利用共同转移臂110PA(图6)来拾取拾取面PF2(图17,框1415),夹持拾取面PF2(图17,框1420),并且将拾取面PF2运输至出站升降机150B1(图17,框1421)。在一个方面中,将拾取面PF2的箱单元5和7作为整体放置在外围缓冲站BS或者对接站TS中的一个处(图17,框1430)。在另一方面中,(按照类似于上文所描述的方式)使拾取面的箱单元5和7隔开并且排齐以用于放置在不同的位置处(图17,框1425)。例如,机器人110将箱单元7放置在外围缓冲站BS处(图17,框1430),将箱单元5返回至机器人110的有效负载区(图17,框1435),夹持箱单元5(图17,框1420),将箱单元5运输至对接站TS(图17,框1421),并且将箱单元5转移至对接站(图17,框1430)。
在另一方面中,参照图13,利用机器人110的共同转移臂110PA(图6)从共同通道130A2内的不同储存位置处拾取出站箱单元5和7。在此,机器人110按照上文所描述的方式将一个或多个入站箱单元ICU转移至一个或多个储存位置,其中,至少一个入站箱单元ICU位于具有出站箱单元5和7的共同拾取通道130A2中。在将至少一个入站箱单元放置在通道130A2的预定储存位置130S处之后,机器人110继续在拾取通道130A2的共同穿过中行进通过拾取通道130A1,并且按照上文所描述的方式从储存空间130S1拾取箱单元5(图17,框1400)。如上文所描述的,在机器人110上朝着有效负载区段110PL的后部排齐箱单元5(图17,框1405)。机器人110继续在拾取通道的共同穿过中行进通过拾取通道130A1并且利用共同转移臂110PA从不同的储存空间130S2拾取箱单元5,以便使箱单元7和5均定位成在共同转移臂110PA上彼此相邻(图17,框1410)。如可以意识到的,在一个方面中,控制器110C被构造成按照任意合适的顺序(诸如,例如,与箱单元被放置的顺序相反的顺序)来实现对箱单元的拾取。
在该多次拾取示例中,箱单元保持位置与拾取通道130的储存空间130S相对应,但在其它方面中,箱单元保持位置包括:输入升降机模块150A1和150A2(在机器人与升降机之间的直接转移在这里进行),用于与输入升降机模块150A1和150A2对接的对接站TS或者外围缓冲站BS(在升降机模块与机器人之间的间接转移在这里进行),以及储存空间130S(指出了利用机器人110从对接站TS和输入升降机模块150A进行拾取,其中,需要箱单元,因为预定订单输出顺序没有位于储存空间130S中而是按照恰好的时间方式被输入到储存货架阵列中,以便基本上直接地递送至输出升降机150B1和150B2)。
机器人110按照上文所描述的方式将箱单元7和5均夹持在有效负载区段110PL内并且离开拾取通道130A1(图17,框1420)。机器人沿着转移甲板130B行进并且与输出升降机150B1对接(图17,框1421)。如上文所描述的,机器人在有效负载区段110PL内使箱单元7和5隔开,以便按照任意合适的方式来排齐箱单元,诸如例如,以便朝着有效负载区段110PL的前部排齐箱单元5并且朝着有效负载区段110PL的背部排齐箱单元7(图17,框1425)。箱单元7被转移至外围缓冲站BS(图17,框1430)。机器人缩回转移臂110PA以使箱单元5返回至有效负载区段110PL(图17,框1435)并且夹持箱单元5(图17,框1420)。箱单元5被运输至输出升降机150B1的对接站TS(图17,框1421),朝着有效负载区段110PL的前部排齐(图17,框1425),如上文所描述的,并且被转移至转移站TS,如上文所描述的(图17,框1430)。在其它方面中,取决于预定箱单元输出顺序,机器人110将箱单元7和5均放置在共同地点/位置处,诸如,在输出升降机150B1和150B2中的一个处。例如,搁架7000H上的拾取面20(图9)可以包括箱单元7和5两者,从而机器人110将这两个箱单元作为一个多箱单元拾取面放置在搁架7000H的单个位置处。如可以意识到的,被放置在缓冲站BS处的箱单元在一个方面中由机器人110转移至对接站TS,或者在其它方面中由任意合适的输送器来转移,该输送器将缓冲站BS连接至对接站TS。在一个方面中,其中,箱单元由机器人110从缓冲站BS转移至对接站TS,该转移是投机性转移,从而例如在用于另一任务(例如,将拾取面转移至储存处、分拣拾取面、从储存处转移拾取面等)的路线中沿着转移甲板行进的、行进通过缓冲站BS的机器人110在执行其它任务的过程中停止以拾取来自缓冲站BS的拾取面并且将拾取面转移至对接站TS。
机器人110箱单元转移处理的示例包括箱单元多次拾取和放置操作以及箱单元的即时分拣以用于根据预定有序输出顺序创建混合货盘负载MPL(如图1F中所示),该预定有序输出循序将根据所公开的实施例关于图9和图24进行描述。关于图9和图24的拾取面的转移基本上类似于上面关于图11至图13所描述的,然而,在该方面中,拾取面的储存器被绕开以使得拾取面在入站和出站升降机150A、150B1之间基本上被直接转移。在一个方面中,机器人从第一拾取面移交站的第一搁架拾取第一拾取面5(诸如,入站升降机150A的转移站TS),其中,入站升降机150A在拾取面移交站上转移一个或多个拾取面/箱(图23,框2300)。机器人110横移经过转移甲板130B并且在第二拾取面移交站的第二搁架(诸如例如,在出站升降机150B1处的转移站TS的缓冲站BS)上缓冲第一拾取面5(或其一部分)(图23,框2310)。在其他方面中,第一拾取面5(或其一部分)被缓冲在出站升降机150B1的转移站TS处,而不是在缓冲站BS处。机器人110在第二搁架处形成第二拾取面5、7,第二拾取面与第二拾取面5不同并且包括按照根据混合箱的预定箱输出有序顺序的有序顺序的多于一个的箱,其中,第一拾取面5和第二拾取面5、7具有共同的至少一个箱(图23,框2320)。在一个方面中,升降机150B1从第二搁架拾取第二拾取面5、7,诸如缓冲站BS或者转移站TS(图23,框2330)。在一个方面中,机器人110在第一拾取面5在第一搁架和第二搁架之间运输期间在第二搁架(例如,缓冲站BS或者转移站TS)处即时形成第二拾取面5、7。在一个方面中,机器人形成自主运输车辆上的第二拾取面5、7。在一个方面中,机器人110在第二搁架或者第二搁架的缓冲部分处形成第二拾取面5、7。在一个方面中,在将第一拾取面的至少一部分运输至第二搁架之前,机器人110将从第一搁架拾取的第一拾取面的至少一部分(诸如其中,拾取面5包括多于一个的箱)放置在储存阵列的储存货架上(诸如,储存空间130S)。在一个方面中,第二搁架形成用于竖直往复升降机的共同拾取面转移接口,该方法进一步包括利用竖直往复升降机共同拾取共同支撑的拾取面。
虽然图24中机器人110被示出为从入站升降机150A的转移站TS拾取一个箱/拾取面5,但是在其他方面中,机器人110拾取两个(或者多于两个)入站拾取面,诸如,箱/拾取面5、7。此处,在一个方面中,机器人110将一个拾取面5防止在出站缓冲站BS(或者出站转移站TS)上,随后移动至另一搁架位置(诸如,另一出站缓冲或转移站BS、TS或者共同缓冲或转移站BS、TS搁架上的相邻位置)以便放置第二拾取面7。在一个方面中,如本文中所述,升降机150B1从缓冲或转移站BS、TS移除拾取面5、7。在另一方面中,机器人110将拾取面5、7放置在出站缓冲或转移站BS、TS搁架上。此处,升降机150B1拾取拾取面5、7中的一个并且将拾取面5、7运输至输出站160UT。升降机150B1返回至缓冲或转移站BS、TS搁架并且拾取其他拾取面5、7以用于转移至输出站160UT。在另外的其他方面中,机器人110将拾取面5、7放置在出站缓冲或转移站BS、TS搁架处,其中,升降机150B1拾取拾取面5、7以用于转移至输出站160UT。此处,拾取面5、7以任意适于建立混合货盘的方式被单一化或者被一起处理,如图1F中所示。
在本文中描述的示例中,在机器人110与升降机150之间的箱单元的转移通过对接站TS被动地进行,如上文所描述的。作为该转移的示例,参照图18,按照类似于上文关于板条1210S和/或定位特征130F所描述的方式相对于对接站TS来定位自主运输车辆(图18,框1800)。机器人110的转移臂110PA(例如,末端执行器)延伸以将拾取面转移至对接站TS,其中,转移臂110PA的指状件273A-273E例如与对接站TS的板条1210S对接(图18,框1801)。如可以意识到的,并且如上文所指出的,可以将多个拾取面放置在对接站TS上(例如,将多个单独的拾取面同时保持在对接站上)以用于同时独立地转移至升降机150。升降机150进行移动以便将负载处理装置LHD、LHDA、LHDB定位成与对接站TS相邻(图18,框1802)。负载处理装置LHD、LHDA、LHDB延伸以从对接站处升高拾取面并且将该拾取面转移至升降机150,其中,负载处理装置LHD、LHDA、LHDB的指状件4273按照上文针对例如图4B所描述的方式与对接站TS的板条1210S对接(图18,框1803)。如可以意识到的,对接站TS没有移动部分,并且在机器人110与升降机150之间的通过对接站TS进行的拾取面的转移是被动转移。如同样可以意识到的,可以按照基本上与上文关于图18所描述的方式相反的方式将拾取面从升降机150转移至机器人110。
在一个方面中,被转移至(例如,被放置到)例如对接站TS(和/或缓冲站BS)的由机器人110建立的(例如,按照上文所描述的方式)拾取面不是由竖直升降机150从对接站TS(和/或缓冲站BS)拾取的相同拾取面。例如,参照图9,机器人110从货架模块RM内的储存空间130S(例如,图2A)建立第一拾取面,该第一拾取面包括单个拾取面7和5(图19,框1900)。机器人110将第一拾取面转移至并且将第一拾取面放置在例如对接站TS的搁架7000B上以用于转移至竖直升降机150(图19,框1910)。如可以意识到的,尽管在该示例中,单个拾取面5和7(例如,形成第一拾取面)被放置在共同搁架7000B上,仅仅用作示例性目的,但在其它方面中,单个拾取面5和7被放置在不同的搁架7000A-7000F上,从而通过机器人110放置在搁架上的拾取面不同于第一拾取面,但包括与第一拾取面共同的至少一个箱单元。例如,将第一拾取面分解,以便使得包括单个拾取面5的不同拾取面被放置在搁架7000B上,而包括单个拾取面7的另一不同拾取面则被放置在例如搁架7000H上。竖直升降机(诸如,升降机150B1)从转移站TS的一个或多个搁架7000A-7000F(例如,对于机器人110和升降机150B1是共同的)拾取第二拾取面(图19,框1920)。在此,第二拾取面不同于第一拾取面,但包括单个拾取面5和7中的至少一个,以便使至少一个箱单元在第一拾取面与第二拾取面之间是共同的。
类似地,在一个方面中,由入站竖直升降机150(见图1中的竖直升降机150A)转移至(例如,放置到)例如对接站TS(和/或缓冲站BS)的拾取面不是由升降机150从对接站TS(和/或缓冲站BS)拾取的相同拾取面。在一个方面中,控制服务器120被构造成命令机器人110,并且利用机器人110在移交站TS(和/或缓冲站BS)处实现入站流动(其也可以被称为仓库补给或者入站流)箱分拣,其中,机器人110形成拾取面,其独立于通过升降机150从输入站拾取箱的顺序。在一个方面中,机器人控制器110C被构造成命令机器人110,并且利用机器人110来在移交站TS(和/或缓冲站BS)处实现入站流动箱分拣,其中,机器人110形成拾取面,其独立于通过升降机150从输入站拾取箱的顺序。在另外的其它方面中,控制服务器120和机器人控制器110C均被构造成命令机器人110,并且利用机器人110来在移交站TS(和/或缓冲站BS)处实现入站流动箱分拣,其中,机器人110形成拾取面,其独立于通过升降机150从输入站拾取箱的顺序。因此,控制服务器120和/或机器人控制器110C被构造成至少部分地利用机器人来设定由机器人110共同承载的且与通过升降机150拾取箱的顺序相分离的箱的入站箱流动分拣。为了描述的目的,这可以称为利用机器人110在移交站(和/或缓冲站BS)处进行的入站流动箱分拣。例如,参照图9A,通过入站输送器160CB将第一拾取面从输入站160IN转移至一个或多个竖直升降机150A1和150A2(图20,框2000)。在该示例中,其中一个第一拾取面包括单个拾取面5和7的组合,而其它第一拾取面包括单个拾取面20和22的组合。竖直升降机150A1将相应第一拾取面5和7放置至对接站TS的搁架7000B,而竖直升降机150A2将其它相应第一拾取面20和22放置至在相同储存层130L上的另一对接站TS的搁架7000H(图20,框2010)。机器人110从对接站TS建立或者如若不然拾取第二拾取面,以便使由竖直升降机150A1和150A2放置在搁架7000B和7000H上的第一拾取面(例如,对于机器人110和相应竖直升降机150A是共同的)不同于第二拾取面,但第二拾取面包括与第一拾取面共同的至少一个箱单元(图20,框2020)。例如,将第一拾取面5和7分解,以便使机器人110拾取包括单个拾取面5(或者单个拾取面7)的不同拾取面,并且/或者将其它第一拾取面20和22分解,以便使机器人110拾取包括单个拾取面20(或者单个拾取面22)的不同拾取面。在此,第二拾取面不同于第一拾取面,但包括第一拾取面的单个拾取面中的至少一个,从而至少一个箱单元在第一拾取面与第二拾取面之间是共同的。如可以意识到的,可以通过机器人将第二拾取面分解,从而使利用110放置在至少一个储存搁架上的拾取面不同于第二拾取面,并且其中,至少一个箱单元在第二拾取面与被放置在至少一个储存搁架上的拾取面之间是共同的。
输出升降机150B1和150B2同样根据预定订单输出顺序通过机器人110将放置在搁架7000A-7000L上的有序的多次拾取转移至输出站160UT。例如,仍参照图9,通过升降机150B1和150B2按照相继顺序拾取拾取面1-22,使得按照如下顺序来将拾取面1-22递送至输出站160UT:按照形成混合货盘负载MPL(图1F)和/或按照在操作者站160EP处将预定有序顺序的拾取物品放置在一个或多个袋子、装货物、或者其它容器TOT中(诸如例如,填充客户订单)所需要的预定顺序(例如,由与图9中图示的每个箱单元/拾取面相关联的数字表示)。这样一来,每个升降机150B1和150B2的每个对接站TS形成缓冲器,该缓冲器保持一个或多个箱单元直到相应升降机150B1和150B2需要且拾取箱单元以用于形成混合货盘负载。
在一个方面中,本文中描述的储存和取回系统100通过提供具有在货架上沿着通道130A排列的货架储存空间130S的储存阵列RMA来实现(图25,框2500)。与每个通道130A可连通地连接的至少一个转移甲板130B被提供(图25,框2505)。至少一个自主运输车辆或者机器人110被提供,并且被构造用于保持至少一个拾取面以及横移经过至少一个转移甲板130B和通道130A,并且具有可延伸的执行器或者转移臂110PA以用于将至少一个拾取面拾取并放置至货架储存空间130S中的一个以及从其拾取并放置至少一个拾取面(图25,框2510)。储存阵列的拾取面转移轴线X、Y由通道130A,至少一个转移甲板130B,在其上横移的至少一个自主运输车辆110,以及可延伸执行器110PA限定,使得拾取面沿着拾取面运输轴线X、Y在自动化储存和取回系统的入站站160IN和自动化储存和取回系统的负载填充区段160UT之间被运输,在入站站160IN处,产生拾取面入站至存储阵列;在负载填充区段160UT处,拾取面从储存阵列出站被设置成根据预定负载填充有序顺序填充负载。混合箱拾取面的即时分拣与储存货架和之主运输车辆110组合在拾取面运输轴线X、Y的至少一个上的运输同时被实现(图25,框2520),使得至少一个拾取面中的两个或更多个从一个或多个货架储存空间130S被拾取,并且放置在一个或多个拾取面保持位置(诸如李如,转移或缓冲站TS、BS)处,不同于货架储存空间130S的一个或多个,根据预定的负载填充有序顺序。在一个方面中,控制器120(如上所述,其可操作地连接至至少一个自主运输车辆)管理拾取面运输轴线X、Y、Z,其中,拾取面运输轴线包括多个运输轴线。如上所述,多个拾取面运输轴线X、Y、Z定向在相对于彼此成角度的至少两个方向。同样如上所述,多个拾取面运输轴线中的一个Y由可延伸执行器110PA的延伸部限定并且处于相对于多个拾取面运输轴线的另一个X成角度的不同方向,多个拾取面运输轴线的另一个X由沿着拾取通道130A横移的自主运输车辆110限定。在一个方面中,如上所述,利用货架和至少一个自主运输车辆组合实现与在多个拾取面运输轴线的每一个的至少一个上的运输同时进行即时分拣。在一个方面中,升降机150限定储存阵列的另一个拾取面运输轴线Z。如本文中描述的,混合箱拾取面的即时分拣由升降机150与在其他拾取面运输轴线上的运输同时实现,使得两个或者更多个拾取面从一个或多个加班层被拾取并且根据预定的负载填充有序顺序被转移至负载填充区段。
现在参考图21、图22A和图22B,在一个方面中,拾取面从输入站160IN到输出站160UT的转移在没有机器人110的拾取面转移的情况下进行。例如,参考图21,输入和输出站160IN、160UT的输送器160CA、160CB被设置使得每个升降机150用于输入和输出站160IN、160UT两者。例如,输入站160IN1的输送器160CA1以及输出站160UT1的输送器160CB1均由升降机150A1、150B1实现。如可以意识到的,每个输送器160CA1、160CB1位于共同升降机150A1、150B1的不同层处(以类似于上面关于缓冲和转移站BS、TS所描述的方式),使得拾取面能够通过在一层处的共同升降机150A1、150B1由一个输送器160CA1、160CB1拾取并且被转移至另一层处的其他输送器160CA1、160CB1。此处,拾取面通过升降机150A1、150B1从一个输送器160CA1、160CB1(例如,从输入站160IN1至输出站160UT1)基本上被直接转移,同时绕过机器人110和储存结构130。如可以意识到的,在一个方面中,如上所述,在将拾取面转移至输出输送机160CB1之前,来自输入站160IN1的拾取面通过共同升降机150A1、150B1被放置在搁架缓冲或转移站BS、TS上以用于分拣拾取面。参考图22A和图22B,在一个方面中,拾取面通过将输入输送器160CA可连通地连接至输出输送器160CB的缓冲车道BL从输入站160IN被转移至输出站160UT,同时绕开机器人110和储存结构130。
参考图27,根据所公开的实施例的各个方面,沿着拾取通道排列在货架上储存空间被提供(图27,框1600)。同样提供多层甲板(图27,框1610),其中,多层甲板中的至少一个甲板层与每个通道相连通,其中,多层甲板和通道在多层甲板的每个层处限定用于自主运输车辆的滚动表面。多个货架层处的货架可从与多个货架层共同的相应滚动表面进行访问(图27,框1620),其中,货架在多层甲板的每一层处沿着至少一个通道设置。在一个方面中,货架层之间的竖直间距对于相应通道的一部分发生变化。在一个方面中,相应通道的该部分的至少两个货架层之间的竖直间距与该相应通道的另一通道部分的至少两个其它货架层之间的另一竖直间距相关,从而自主运输车辆在共同通道穿过时按照有序顺序实现多次拾取。在一个方面中,相应通道的该部分的至少两个货架层之间的竖直间距与该相应通道的另一通道部分的至少两个其它货架层之间的另一竖直间距相关,从而该竖直间距和该其它竖直间距实现用储存的物品大体上填充多个甲板层之间的竖直空间。
根据所公开的实施例的一个或多个方面,提供了一种自动化储存和取回系统。该自动化储存和取回系统包括:至少一个自主运输车辆;转移甲板,该转移甲板为至少一个自主运输车辆限定运输表面;至少一个往复升降机;第一拾取面对接站和第二拾取面对接站,该第一拾取面对接站和第二拾取面对接站连接至转移甲板并且彼此间隔分开,每个拾取面对接站在转移甲板上的至少一个自主运输车辆与每个拾取面对接站处的至少一个往复升降机之间形成拾取面转移对接,使得在每个拾取面对接站处在至少一个往复升降机与至少一个自主运输车辆之间转移拾取面,其中,至少一个自主运输车辆被构造成在第一拾取面对接站处拾取第一拾取面,横移经过转移甲板并且在第二拾取面对接站处缓冲该第一拾取面或其至少一部分,使得第一拾取面的至少一部分缓冲在第二拾取面对接站处以用于利用出站拾取面运输系统按照拾取面的有序顺序运输,该有序顺序是根据混合箱拾取面的预定箱输出有序顺序。
根据所公开的实施例的一个或多个方面,至少一个自主运输车辆被构造成在第二拾取面对接站处缓冲第一拾取面或其至少一部分,使得第二拾取面对接站具有缓冲在共同支撑件上的多个拾取面。
根据所公开的实施例的一个或多个方面,在第二拾取面对接站处的多个拾取面的至少一个与第一拾取面不同,并且包括来自第一拾取面的箱。
根据所公开的实施例的一个或多个方面,在第一拾取面在第一拾取面对接站和第二拾取面对接站之间运输期间,自主运输车辆在第二拾取面对接站处即时建立多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自主运输车辆建立在自主运输车辆上的多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自主运输车辆在第二拾取面对接站或者第二拾取面对接站缓冲器的共同支撑件的缓冲部分处建立多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,第一拾取面是位于第二拾取面对接站处的多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统包括连接至甲板的自主运输车辆访问通道,以及具有设置在多层搁架中并且沿着自主运输车辆访问通道分布的储存货架的储存阵列。
根据所公开的实施例的一个或多个方面,自主运输车辆被设置成使得在运输至第二拾取面对接站之前,从第一拾取面对接站拾取的第一拾取面的至少另一部分被放置在储存阵列的储存货架上。
根据所公开的实施例的一个或多个方面,第二拾取面对接站形成用于至少一个往复升降机的共同拾取面转移接口,使得利用至少一个往复升降机共同拾取共同支撑的拾取面。
根据所公开的实施例的一个或多个方面,转移甲板是非确定性的并且具有多个行进车道。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统被提供。自动化储存和取回系统包括:至少一个自主运输车辆;转移甲板,该转移甲板为至少一个自主运输车辆限定运输表面;至少一个入站拾取面运输系统,该至少一个入站拾取面运输系统置于卸载单元和负载填充区段之间;至少一个出站拾取面运输系统,该至少一个出站拾取面运输系统置于卸载单元和负载填充区段之间;第一拾取面对接站和第二拾取面对接站,该第一拾取面对接站和第二拾取面对接站连接至转移甲板并且彼此间隔分开,每个拾取面对接站在转移甲板上的至少一个自主运输车辆与每个拾取面对接站处的入站拾取面运输系统和出站拾取面运输系统中的相应一个之间对接,使得在每个拾取面对接站处在入站拾取面运输系统和出站拾取面运输系统中的相应一个与至少一个自主运输车辆之间转移拾取面,其中,至少一个自主运输车辆被构造成在第一拾取面对接站处拾取第一拾取面,横移经过转移甲板并且在第二拾取面对接站处缓冲该第一拾取面或其至少一部分,使得第二拾取面对接站具有按照拾取面的有序顺序在共同支撑件上缓冲的多个拾取面,该有序顺序是根据混合箱拾取面的预定箱输出有序顺序。
根据所公开的实施例的一个或多个方面,在第二拾取面对接站处的多个拾取面中的至少一个不同于第一拾取面并且包括来自第一拾取面的箱。
根据所公开的实施例的一个或多个方面,在第一拾取面在第一拾取面对接站和第二拾取面对接站之间运输期间,自主运输车辆在第二拾取面对接站处即时建立多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自主运输车辆建立在自主运输车辆上的多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自主运输车辆在第二拾取面对接站或者第二拾取面对接站缓冲器的共同支撑件的缓冲部分处建立多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,第一拾取面是位于第二拾取面对接站处的多个拾取面中的至少一个。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统包括连接至甲板的自主运输车辆访问通道,以及具有设置在多个搁架中并且沿着自主运输车辆访问通道分布的储存货架的储存阵列。
根据所公开的实施例的一个或多个方面,自主运输车辆被设置成使得在运输至第二拾取面对接站之前,从第一拾取面对接站拾取的第一拾取面的至少另一部分被放置在储存阵列的储存货架上。
根据所公开的实施例的一个或多个方面,第二拾取面对接站形成用于入站拾取面运输系统和出站拾取面运输系统的相应一个的共同拾取面转移接口,使得利用入站拾取面运输系统和出站拾取面运输系统的相应一个共同拾取共同支撑的拾取面。
根据所公开的实施例的一个或多个方面,转移甲板是非确定性的并且具有多个行进车道。
根据所公开的实施例的一个或多个方面,提供了一种用于自动化储存和取回的方法。该方法包括:利用自主运输车辆从第一拾取面移交站拾取第一拾取面;利用自主运输车辆在第二拾取面移交站的第二搁架上缓冲该第一拾取面;在第二搁架处形成第二拾取面,该第二拾取面不同于第一拾取面并且包括按照有序顺序的多于一个的箱,该有序顺序与混合箱的预定箱输出有序顺序相对应,其中,第一拾取面和第二拾取面具有共同的至少一个箱;以及利用往复升降机从第二搁架拾取第二拾取面。
根据所公开的实施例的一个或多个方面,该方法包括在第一拾取面在第一搁架和第二搁架之间运输期间,利用自主运输车辆在第二搁架处即时形成第二拾取面。
根据所公开的实施例的一个或多个方面,该方法包括利用自主运输车辆形成自主运输车辆上的第二拾取面。
根据所公开的实施例的一个或多个方面,该方法包括利用自主运输车辆在第二搁架或者第二搁架的缓冲部分处形成第二拾取面。
根据所公开的实施例的一个或多个方面,该方法包括在将第一拾取面的至少一部分运输至第二搁架之前,利用自主运输车辆将从第一搁架拾取的第一拾取面的至少一部分放置在储存阵列的储存货架上。
根据所公开的实施例的一个或多个方面,第二搁架形成用于往复升降机的共同拾取面转移接口,该方法进一步包括与往复升降机共同拾取共同支撑的拾取面。
根据所公开的实施例的一个或多个方面,提供了一种自动化储存和取回系统。自动化储存和取回系统包括:储存阵列,该储存阵列具有沿着通道排列在货架上的货架储存空间;至少一个转移甲板,该至少一个转移甲板与每个通道可连通地连接;至少一个自主运输车辆,该至少一个自主运输车辆被构造用于保持至少一个拾取面以及横向经过至少一个转移甲板和通道,并且具有用于将至少一个拾取面拾取并放置至货架储存空间中的一个以及从其拾取并放置至少一个拾取面的可延伸执行器,其中,通道、至少一个转移甲板、在该转移甲板上横移的至少一个自主运输车辆以及可延伸执行器限定储存阵列的拾取面运输轴线,拾取面沿着该拾取面运输轴线在自动化储存和取回系统的入站区段和自动化储存和取回系统的负载填充区段之间运输,在入站区段处产生入站至储存阵列的拾取面,在负载填充区段处来自储存阵列的出站拾取面被设置成根据预定负载填充有序顺序填充负载,以及其中,货架和自主运输车辆被设置成使得货架和自主运输车辆组合实现与至少一个拾取面运输轴线上的运输同时进行的即时分拣,从而使得至少一个拾取面中的两个或更多个从一个或多个货架储存空间被拾取并且根据预定负载填充有序顺序被放置在一个或多个拾取面保持位置处,该一个或多个拾取面保持位置不同于货架储存空间中的一个或多个。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统包括控制器,该控制器可操作地连接至至少一个自主运输车辆并且被设置成管理拾取面运输轴线,其中,拾取面运输轴线包括多个运输轴线。
根据所公开的实施例的一个或多个方面,多个拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
根据所公开的实施例的一个或多个方面,由可延伸执行器的延伸部限定的多个拾取面运输轴线中的一个处于不同方向上,该不同方向相对于由沿着通道的自主运输车辆限定的多个拾取面运输轴线中的另一个成角度。
根据所公开的实施例的一个或多个方面,货架和至少一个自主运输车辆组合实现与多个拾取面运输轴线的每一个中的至少一个上的运输同时进行的即时分拣。
根据所公开的实施例的一个或多个方面,至少一个转移甲板包括设置在不同甲板层处的多于一个的转移甲板。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统包括升降机,该升降机可连通地连接至处于不同甲板层处的每个甲板,该升降机被设置成在不同甲板层之间运输拾取面并且限定储存阵列的另一拾取面运输轴线。
根据所公开的实施例的一个或多个方面,升降机被设置成实现与其他拾取面运输轴线上的运输同时进行的混合箱拾取面的即时分拣,使得两个或更多个拾取面从一个或多个甲板层被拾取并且根据预定负载填充有序顺序被运输至负载填充区段。
根据所公开的实施例的一个或多个方面,即时分拣与多个拾取面运输轴线的每一个以及升降机的其他运输轴线的每一个中的至少一个上的运输同时实现。
根据所公开的实施例的一个或多个方面,提供了一种自动化储存和取回系统。自动化储存和取回系统包括:储存阵列,该储存阵列具有沿着通道排列在货架上的货架储存空间;至少一个转移甲板,该至少一个转移甲板与每个通道可连通地连接;至少一个自主运输车辆,该至少一个自主运输车辆被构造用于保持至少一个拾取面以及横向经过至少一个转移甲板和通道,并且具有用于将至少一个拾取面拾取并放置至货架储存空间中的一个以及从其拾取和放置至少一个拾取面的可延伸执行器;至少一个升降机,该至少一个升降机可连通地连接至每个转移甲板,该升降机被设置成将拾取面转移至至少一个转移甲板以及从至少一个转移甲板转移拾取面;以及其中,通道、至少一个转移甲板、在该转移甲板上横移的至少一个自主运输车辆、可延伸执行器以及至少一个升降机限定储存阵列的拾取面运输轴线,拾取面沿着该拾取面运输轴线在自动化储存和取回系统的入站区段和自动化储存和取回系统的负载填充区段之间运输,在入站区段处产生入站至储存阵列的拾取面,在负载填充区段处来自储存阵列的出站拾取面被设置成根据预定负载填充有序顺序填充负载,货架和自主运输车辆被设置使得货架和自主运输车辆组合实现在拾取面运输轴线的至少一个上的混合箱拾取面的即时分拣,使得至少一个拾取面中的两个或更多个从一个或多个货架储存空间被拾取并且根据预定负载填充有序顺序被放置在一个或多个拾取面保持位置处,该一个或多个拾取面保持位置不同于一个或多个货架储存空间,并且至少一个升降机被设置成实现在至少一个拾取面运输轴线的另一个上的混合箱拾取面的即时分拣,使得拾取面中的两个或更多个从至少一个转移甲板中的不同甲板被拾取,并且根据预定负载填充有序顺序被运输至负载填充区段,其中,即时分拣与拾取面运输轴线的每一个中的至少一个上的运输同时实现。
根据所公开的实施例的一个或多个方面,自动化储存和取回系统包括控制器,该控制器可操作地连接至至少一个自主运输车辆和至少一个升降机并且被设置成管理拾取面运输轴线。
根据所公开的实施例的一个或多个方面,拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
根据所公开的实施例的一个或多个方面,由可延伸执行器的延伸部限定的拾取面运输轴线中的一个处于不同方向上,该不同方向相对于由沿着通道的自主运输车辆限定的拾取面运输轴线中的另一个成角度。
根据所公开的实施例的一个或多个方面,货架和至少一个自主运输车辆组合实现与拾取面运输轴线的至少一个上的运输同时进行的即时分拣。
根据所公开的实施例的一个或多个方面,至少一个转移甲板包括设置在不同甲板层处的多于一个的转移甲板,并且至少一个升降机被构造成在不同甲板层之间运输拾取面。
根据所公开的实施例的一个或多个方面,提供了一种用于自动化储存和取回的方法。该方法包括:提供储存阵列,该储存阵列具有沿着通道排列在货架上的货架储存空间;提供至少一个转移甲板,该至少一个转移甲板与每个通道可连通地连接;提供至少一个自主运输车辆,该至少一个自主运输车辆被构造用于保持至少一个拾取面以及横移经过至少一个转移甲板和通道,并且具有用于将至少一个拾取面拾取并放置至货架储存空间中的一个以及从该货架储存空间中的一个拾取并放置至少一个拾取面的可延伸执行器;利用通道、至少一个转移甲板、在该至少一个转移甲板上横移的至少一个自主运输车辆以及可延伸执行器限定储存阵列的拾取面运输轴线,使得拾取面沿着拾取面运输轴线在自动化储存和取回系统的入站区段与自动化储存和取回系统的负载填充区段之间被运输,在入站区段出产生入站至储存阵列的拾取面,在负载填充区段处来自储存阵列的出站拾取面被设置成根据预定负载填充有序顺序填充负载,并且利用货架和自主运输车辆的组合实现与拾取面运输轴线的至少一个上的运输同时进行的混合箱拾取面的即时分拣,使得至少一个拾取面中的两个或者更多个从一个或多个货架储存空间被拾取并且根据预定负载填充有序顺序被放置在一个或多个拾取面保持位置处,该一个或多个拾取面保持位置不同于一个或多个货架储存空间。
根据所公开的实施例的一个或多个方面,该方法包括利用控制器管理拾取面运输轴线,该控制器可操作地连接至至少一个自主运输车辆,其中,拾取面运输轴线包括多个运输轴线。
根据所公开的实施例的一个或多个方面,多个拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
根据所公开的实施例的一个或多个方面,由可延伸执行器的延伸部限定的多个拾取面运输轴线中的一个处于不同方向上,该不同方向相对于由沿着通道的自主运输车辆限定的多个拾取面运输轴线中的另一个成角度。
根据所公开的实施例的一个或多个方面,该方法包括利用货架和至少一个自主运输车辆组合实现与多个拾取面运输轴线的每一个中的至少一个上的运输同时进行的即时分拣。
根据所公开的实施例的一个或多个方面,该方法包括利用升降机限定储存阵列的另一个拾取面运输轴线,该升降机可连通地连接至置于不同甲板层处的至少一个转移甲板的每一个,并且在不同甲板层之间运输拾取面。
根据所公开的实施例的一个或多个方面,该方法包括利用升降机实现与其他拾取面运输轴线上的运输同时进行的混合箱拾取面的即时分拣,使得两个或更多个拾取面从一个或多个甲板层被拾取并且根据预定负载填充有序顺序被运输至负载填充区段。
根据所公开的实施例的一个或多个方面,该方法包括实现与多个拾取面运输轴线的每一个以及升降机的其他运输轴线的每一个的至少一个上的运输同时进行的即时分拣。
应理解的是,前述描述仅仅图解说明了所公开的实施例的各个方面。在不脱离所公开的实施例的各个方面的情况下,本领域技术人员可以想到各种替代例和修改例。相应地,所公开的实施例的各个方面意在涵盖落在所附权利要求书的范围内的所有这些替代例、修改例以及变化例。另外,在彼此不同的从属或者独立权利要求中叙述了不同的特征,这一不争的事实并不表明不能够有利地使用这些特征的组合,这种组合仍被包括在本发明的各方面的范围内。
Claims (49)
1.一种自动化储存和取回系统,包括:
至少一个自主运输车辆;
转移甲板,所述转移甲板为所述至少一个自主运输车辆限定运输表面;
至少一个往复升降机;
第一拾取面对接站和第二拾取面对接站,所述第一拾取面对接站和第二拾取面对接站连接至所述转移甲板并且彼此间隔分开,每个拾取面对接站在所述转移甲板上的所述至少一个自主运输车辆与每个拾取面对接站处的所述至少一个往复升降机之间形成拾取面转移对接,使得拾取面在每个拾取面对接站处在所述至少一个往复升降机与所述至少一个自主运输车辆之间转移;
其中,至少一个自主运输车辆被构造成在第一拾取面对接站处拾取第一拾取面,横移经过所述转移甲板并且在所述第二拾取面对接站处缓冲所述第一拾取面或其至少一部分,使得所述第二拾取面对接站具有按照拾取面的有序顺序缓冲在共同支撑件上的多个拾取面,所述有序顺序根据混合箱拾取面的预定箱输出有序顺序。
2.根据权利要求1所述的自动化储存和取回系统,其中,所述第二拾取面对接站处的所述多个拾取面中的至少一个不同于所述第一拾取面并且包括来自所述第一拾取面的箱单元。
3.根据权利要求1所述的自动化储存和取回系统,其中,在所述第一拾取面在所述第一拾取面对接站和所述第二拾取面对接站之间运输期间,所述自主运输车辆在所述第二拾取面对接站处即时建立所述多个拾取面中的至少一个。
4.根据权利要求3所述的自动化储存和取回系统,其中,所述自主运输车辆建立在所述自主运输车辆上的多个拾取面中的至少一个。
5.根据权利要求3所述的自动化储存和取回系统,其中,所述自主运输车辆在所述第二拾取面对接站或者第二拾取面对接站缓冲器的所述共同支撑件的缓冲部分处建立所述多个拾取面中的至少一个。
6.根据权利要求1所述的自动化储存和取回系统,其中,所述第一拾取面是位于所述第二拾取面对接站处的所述多个拾取面中的至少一个。
7.根据权利要求1所述的自动化储存和取回系统,进一步包括:
自主运输车辆访问通道,所述自主运输车辆访问通道连接至所述甲板;以及
储存阵列,所述储存阵列具有设置在多层搁架中并且沿着所述自主运输车辆访问通道分布的储存货架。
8.根据权利要求7所述的自动化储存和取回系统,其中,所述自主运输车辆被设置使得在运输至所述第二拾取面对接站之前,从所述第一拾取面对接站拾取的所述第一拾取面的至少另一部分被放置在所述储存阵列的储存货架上。
9.根据权利要求1所述的自动化储存和取回系统,其中,所述第二拾取面对接站形成用于所述至少一个往复升降机的共同拾取面转移接口,使得用至少一个往复升降机共同拾取共同支撑的拾取面。
10.根据权利要求1所述的自动化储存和取回系统,其中,所述转移甲板是非确定性的并且具有多个行进车道。
11.一种自动化储存和取回系统,包括:
至少一个自主运输车辆;
转移甲板,所述转移甲板为所述至少一个自主运输车辆限定运输表面;
至少一个入站拾取面运输系统,所述至少一个入站拾取面运输系统置于卸载单元和负载填充区段之间;
至少一个出站拾取面运输系统,所述至少一个出站拾取面运输系统置于所述卸载单元和所述负载填充区段之间;
第一拾取面对接站和第二拾取面对接站,所述第一拾取面对接站和第二拾取面对接站连接至所述转移甲板并且彼此间隔分开,每个拾取面对接站在所述转移甲板上的所述至少一个自主运输车辆与每个拾取面对接站处的所述入站拾取面运输系统和所述出站拾取面运输系统中的相应一个之间对接,使得拾取面在每个拾取面对接站处在所述入站拾取面运输系统和所述出站拾取面运输系统中的相应一个与所述至少一个自主运输车辆之间转移;
其中,所述至少一个自主运输车辆被构造成在所述第一拾取面对接站处拾取第一拾取面,横移经过甲板并且在所述第二拾取面对接站处缓冲所述第一拾取面或其至少一部分,使得所述第一拾取面的至少一个部分缓冲在所述第二拾取面对接站处以用于利用所述出站拾取面运输系统按照拾取面的有序顺序运输,所述有序顺序根据混合箱拾取面的预定箱输出有序顺序。
12.根据权利要求11所述的自动化储存和取回系统,其中,在所述第二拾取面对接站处的所述多个拾取面中的至少一个不同于所述第一拾取面并且包括来自所述第一拾取面的箱单元。
13.根据权利要求11所述的自动化储存和取回系统,其中,在所述第一拾取面在所述第一拾取面对接站和所述第二拾取面对接站之间运输期间,所述自主运输车辆在所述第二拾取面对接站处即时建立所述多个拾取面中的至少一个。
14.根据权利要求13所述的自动化储存和取回系统,其中,所述自主运输车辆建立在所述自主运输车辆上的所述多个拾取面中的至少一个。
15.根据权利要求13所述的自动化储存和取回系统,其中,所述自主运输车辆在所述第二拾取面对接站或者第二拾取面对接站缓冲器的共同支撑件的缓冲部分处建立所述多个拾取面中的至少一个。
16.根据权利要求11所述的自动化储存和取回系统,其中,所述第一拾取面是位于所述第二拾取面对接站处的所述多个拾取面中的至少一个。
17.根据权利要求11所述的自动化储存和取回系统,进一步包括:
自主运输车辆访问通道,所述自主运输车辆访问通道连接至甲板;以及
储存阵列,所述储存阵列具有设置在多层搁架中并且沿着所述自主运输车辆访问通道分布的储存货架。
18.根据权利要求17所述的自动化储存和取回系统,其中,所述自主运输车辆被设置使得在运输至所述第二拾取面对接站之前,从所述第一拾取面对接站拾取的所述第一拾取面的至少另一部分被放置在所述储存阵列的储存货架上。
19.根据权利要求11所述的自动化储存和取回系统,其中,所述第二拾取面对接站形成用于所述入站拾取面运输系统和所述出站拾取面运输系统的相应一个的共同拾取面转移接口,使得利用所述入站拾取面运输系统和所述出站拾取面运输系统的相应一个共同拾取共同支撑的拾取面。
20.根据权利要求11所述的自动化储存和取回系统,其中,所述转移甲板是非确定性的并且具有多个行进车道。
21.一种用于在自动化储存和取回系统中运输拾取面的方法,所述方法包括:
利用自主运输车辆从第一拾取面移交站拾取第一拾取面,所述第一拾取面移交站与所述自主运输车辆分开并且不同于所述自主运输车辆;
利用自主运输车辆将所述第一拾取面缓冲在第二拾取面移交站的第二搁架上,所述第二拾取面移交站与所述自主运输车辆分开并且不同于所述自主运输车辆;
在所述第二搁架处形成第二拾取面,所述第二拾取面不同于所述第一拾取面并且包括具有有序顺序的多于一个的箱,所述有序顺序与混合箱的预定箱输出有序顺序相对应,其中,所述第一拾取面和所述第二拾取面具有共同的至少一个箱;以及
利用往复升降机从所述第二搁架拾取所述第二拾取面,所述往复升降机与所述自主运输车辆分开并且不同于所述自主运输车辆,并且不同于将所述第一拾取面放置在第一搁架上的另一个往复升降机。
22.根据权利要求21所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括在所述第一拾取面在所述第一搁架和所述第二搁架之间运输期间,利用所述自主运输车辆在所述第二搁架处即时形成所述第二拾取面。
23.根据权利要求22所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用所述自主运输车辆形成所述自主运输车辆上的所述第二拾取面。
24.根据权利要求22所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用所述自主运输车辆在所述第二搁架或者所述第二搁架的缓冲部分处形成所述第二拾取面。
25.根据权利要求21所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括在将所述第一拾取面的至少一部分运输至所述第二搁架之前,利用所述自主运输车辆将从所述第一搁架拾取的所述第一拾取面的至少一部分放置在储存阵列的储存货架上。
26.根据权利要求21所述的用于在自动化储存和取回系统中运输拾取面的方法,其中,所述第二搁架形成用于所述往复升降机的共同拾取面转移接口,所述方法进一步包括利用所述往复升降机共同拾取共同支撑的拾取面。
27.一种自动化储存和取回系统,包括:
储存阵列,所述储存阵列具有沿着通道排列在货架上的货架储存空间;
至少一个转移甲板,所述至少一个转移甲板与每个通道可连通地连接;
至少一个自主运输车辆,所述至少一个自主运输车辆被构造用于保持至少一个拾取面以及横向经过所述至少一个转移甲板和通道,并且具有用于将所述至少一个拾取面拾取并放置至所述货架储存空间中的一个以及从所述货架储存空间中的一个拾取并放置所述至少一个拾取面的可延伸执行器;
其中,所述通道、所述至少一个转移甲板、在所述转移甲板上横移的所述至少一个自主运输车辆以及所述可延伸执行器限定所述储存阵列的拾取面运输轴线,拾取面沿着所述拾取面运输轴线在所述自动化储存和取回系统的入站区段和所述自动化储存和取回系统的负载填充区段之间运输,在所述入站区段处产生入站至所述储存阵列的拾取面,在所述负载填充区段处来自所述储存阵列的出站拾取面被设置成根据预定混合箱负载填充有序顺序填充负载,以及
其中,所述货架和所述自主运输车辆被设置成使得所述货架和所述自主运输车辆组合实现与所述拾取面运输轴线的至少一个上的运输同时进行的即时分拣,使得所述至少一个拾取面的两个或更多个从所述货架储存空间的一个或多个被拾取并且根据所述预定混合箱负载填充有序顺序被放置在一个或多个拾取面保持位置处,所述一个或多个拾取面保持位置不同于所述货架储存空间的一个或多个。
28.根据权利要求27所述的自动化储存和取回系统,进一步包括控制器,所述控制器可操作地连接至所述至少一个自主运输车辆并且被设置成管理所述拾取面运输轴线,其中,所述拾取面运输轴线包括多个运输轴线。
29.根据权利要求28所述的自动化储存和取回系统,其中,所述多个拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
30.根据权利要求28所述的自动化储存和取回系统,其中,由所述可延伸执行器的延伸部限定的所述多个拾取面运输轴线中的一个处于不同方向上,所述不同方向相对于由沿着所述通道的所述自主运输车辆限定的所述多个拾取面运输轴线中的另一个成角度。
31.根据权利要求28所述的自动化储存和取回系统,其中,所述货架和所述至少一个自主运输车辆组合实现与所述多个拾取面运输轴线的每一个中的至少一个上的运输同时进行的即时分拣。
32.根据权利要求27所述的自动化储存和取回系统,其中,所述至少一个转移甲板包括设置在不同甲板层处的多于一个的转移甲板。
33.根据权利要求32所述的自动化储存和取回系统,进一步包括升降机,所述升降机可连通地连接至处于所述不同甲板层处的每个甲板,所述升降机被设置成在不同甲板层之间运输所述拾取面并且限定所述储存阵列的另一拾取面运输轴线。
34.根据权利要求33所述的自动化储存和取回系统,其中,所述升降机被设置成实现与其他拾取面运输轴线上的运输同时进行的混合箱拾取面的即时分拣,使得两个或更多个拾取面从一个或多个甲板层被拾取并且根据预定混合箱负载填充有序顺序被运输至负载填充区段。
35.根据权利要求34所述的自动化储存和取回系统,其中,即时分拣与所述多个拾取面运输轴线的每一个以及所述升降机的其他运输轴线的每一个中的至少一个上的运输同时实现。
36.一种自动化储存和取回系统,包括:
储存阵列,所述储存阵列具有沿着通道排列在货架上的货架储存空间;
至少一个转移甲板,所述至少一个转移甲板与每个通道可连通地连接;
至少一个自主运输车辆,所述至少一个自主运输车辆被构造用于保持至少一个拾取面以及横向经过所述至少一个转移甲板和通道,并且具有用于将所述至少一个拾取面拾取并放置至所述货架储存空间中的一个以及从所述货架储存空间中的一个拾取并放置所述至少一个拾取面的可延伸执行器;
至少一个升降机,所述至少一个升降机可连通地连接至每个转移甲板,所述升降机被设置成将拾取面转移至所述至少一个转移甲板以及从所述至少一个转移甲板转移拾取面;以及
其中,所述通道、所述至少一个转移甲板、在所述转移甲板上横移的所述至少一个自主运输车辆、所述可延伸执行器以及所述至少一个升降机限定所述储存阵列的拾取面运输轴线,拾取面沿着所述拾取面运输轴线在所述自动化储存和取回系统的入站区段和所述自动化储存和取回系统的负载填充区段之间运输,在所述入站区段处产生入站至储存阵列的拾取面,在所述负载填充区段处来自所述储存阵列的出站拾取面被设置成根据预定混合箱负载填充有序顺序填充负载,
所述货架和所述自主运输车辆被设置成使得所述货架和所述自主运输车辆组合实现在所述拾取面运输轴线的至少一个上的混合箱拾取面的即时分拣,使得所述至少一个拾取面的两个或更多个从所述货架储存空间的一个或多个被拾取并且根据所述预定混合箱负载填充有序顺序被放置在一个或多个拾取面保持位置处,所述一个或多个拾取面保持位置不同于所述货架储存空间的一个或多个,以及
所述至少一个升降机被设置成实现在所述至少一个拾取面运输轴线的另一个上的所述混合箱拾取面的即时分拣,使得所述拾取面的两个或更多个从所述至少一个转移甲板的不同甲板被拾取,并且根据所述预定混合箱负载填充有序顺序被运输至所述负载填充区段,其中,即时分拣与所述拾取面运输轴线的每一个中的至少一个上的运输同时实现。
37.根据权利要求36所述的自动化储存和取回系统,进一步包括控制器,所述控制器可操作地连接至所述至少一个自主运输车辆和所述至少一个升降机并且被设置成管理所述拾取面运输轴线。
38.根据权利要求37所述的自动化储存和取回系统,其中,所述拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
39.根据权利要求37所述的自动化储存和取回系统,其中,由所述可延伸执行器的延伸部限定的所述拾取面运输轴线中的一个处于不同方向上,所述不同方向相对于由沿着所述通道的所述自主运输车辆限定的所述拾取面运输轴线中的另一个成角度。
40.根据权利要求37所述的自动化储存和取回系统,其中,所述货架和所述至少一个自主运输车辆组合实现与所述拾取面运输轴线的至少一个上的运输同时进行的即时分拣。
41.根据权利要求36所述的自动化储存和取回系统,其中,所述至少一个转移甲板包括设置在不同甲板层处的多于一个的转移甲板,并且所述至少一个升降机被构造成在不同甲板层之间运输拾取面。
42.一种用于在自动化储存和取回系统中运输拾取面的方法,包括:
提供储存阵列,所述储存阵列具有沿着通道排列在货架上的货架储存空间;
提供至少一个转移甲板,所述至少一个转移甲板与每个通道可连通地连接;
提供至少一个自主运输车辆,所述至少一个自主运输车辆被构造用于保持至少一个拾取面以及横移经过所述至少一个转移甲板和通道,并且具有用于将所述至少一个拾取面拾取并放置至所述货架储存空间中的一个以及从所述货架储存空间中的一个拾取并放置所述至少一个拾取面的可延伸执行器;
利用所述通道、所述至少一个转移甲板,在所述至少一个转移甲板上横移的所述至少一个自主运输车辆以及所述可延伸执行器限定所述储存阵列的拾取面运输轴线,使得拾取面沿着所述拾取面运输轴线在所述自动化储存和取回系统的入站区段与所述自动化储存和取回系统的负载填充区段之间运输,在所述入站区段出产生入站至所述储存阵列的拾取面,在所述负载填充区段处来自所述储存阵列的出站拾取面被设置成根据预定负载填充有序顺序填充负载,以及
利用所述货架和所述自主运输车辆的组合实现与所述拾取面运输轴线的至少一个上的运输同时进行的混合箱拾取面的即时分拣,使得至少一个拾取面的两个或者更多个从所述货架储存空间的一个或多个被拾取并且根据所述预定负载填充有序顺序被放置在所述至少一个转移甲板的一个或多个拾取面保持位置处,所述一个或多个拾取面保持位置不同于所述货架储存空间的一个或多个。
43.根据权利要求42所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用控制器管理所述拾取面运输轴线,所述控制器可操作地连接至所述至少一个自主运输车辆,其中,所述拾取面运输轴线包括多个运输轴线。
44.根据权利要求43所述的用于在自动化储存和取回系统中运输拾取面的方法,其中,所述多个拾取面运输轴线被定向在相对于彼此成角度的至少两个方向上。
45.根据权利要求43所述的用于在自动化储存和取回系统中运输拾取面的方法,其中,由所述可延伸执行器的延伸部限定的所述多个拾取面运输轴线中的一个处于不同方向上,所述不同方向相对于由沿着通道的所述自主运输车辆限定的所述多个拾取面运输轴线中的另一个成角度。
46.根据权利要求43所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用所述货架和所述至少一个自主运输车辆组合实现与所述多个拾取面运输轴线的每一个中的至少一个上的运输同时进行的即时分拣。
47.根据权利要求42所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用所述储存阵列的升降机限定另一个拾取面运输轴线,所述升降机可连通地连接至置于不同甲板层处的至少一个转移甲板中的每一个,并且在不同甲板层之间运输所述拾取面。
48.根据权利要求47所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括利用所述升降机实现与所述另一个拾取面运输轴线上的运输同时进行的混合箱拾取面的即时分拣,使得拾取面的两个或更多个从一个或多个甲板层被拾取并且根据所述预定负载填充有序顺序被运输至所述负载填充区段。
49.根据权利要求48所述的用于在自动化储存和取回系统中运输拾取面的方法,进一步包括实现与所述拾取面运输轴线的每一个以及所述升降机的所述另一个拾取面运输轴线的每一个的至少一个上的运输同时进行的即时分拣。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562104520P | 2015-01-16 | 2015-01-16 | |
| US62/104520 | 2015-01-16 | ||
| US201562107135P | 2015-01-23 | 2015-01-23 | |
| US62/107135 | 2015-01-23 | ||
| US14/997920 | 2016-01-18 | ||
| US14/997,920 US9856083B2 (en) | 2015-01-16 | 2016-01-18 | Storage and retrieval system |
| PCT/US2016/013877 WO2016115565A1 (en) | 2015-01-16 | 2016-01-19 | Storage and retrieval system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107531411A CN107531411A (zh) | 2018-01-02 |
| CN107531411B true CN107531411B (zh) | 2021-08-27 |
Family
ID=55315753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680016181.4A Active CN107531411B (zh) | 2015-01-16 | 2016-01-19 | 储存和取回系统 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US9856083B2 (zh) |
| EP (1) | EP3245145A1 (zh) |
| JP (3) | JP6902470B2 (zh) |
| KR (2) | KR20240017136A (zh) |
| CN (1) | CN107531411B (zh) |
| CA (1) | CA2974039C (zh) |
| WO (1) | WO2016115565A1 (zh) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI615337B (zh) | 2009-04-10 | 2018-02-21 | 辛波提克有限責任公司 | 自動化貨箱儲存系統及處理被建構成托板化負荷以在儲存設施往返運送的貨箱之方法 |
| US10822168B2 (en) | 2010-12-15 | 2020-11-03 | Symbotic Llc | Warehousing scalable storage structure |
| US9884719B2 (en) | 2014-12-12 | 2018-02-06 | Symbotic, LLC | Storage and retrieval system |
| US10214355B2 (en) | 2015-01-16 | 2019-02-26 | Symbotic, LLC | Storage and retrieval system |
| US11893533B2 (en) | 2015-01-16 | 2024-02-06 | Symbotic Llc | Storage and retrieval system |
| US10521767B2 (en) | 2015-01-16 | 2019-12-31 | Symbotic, LLC | Storage and retrieval system |
| US9856083B2 (en) | 2015-01-16 | 2018-01-02 | Symbotic, LLC | Storage and retrieval system |
| US10102496B2 (en) | 2015-01-16 | 2018-10-16 | Symbotic, LLC | Storage and retrieval system |
| US11254502B2 (en) | 2015-01-16 | 2022-02-22 | Symbotic Llc | Storage and retrieval system |
| US9850079B2 (en) | 2015-01-23 | 2017-12-26 | Symbotic, LLC | Storage and retrieval system transport vehicle |
| FR3042182B1 (fr) * | 2015-10-13 | 2020-09-18 | Exotec Solutions | Systeme de preparation de commandes |
| USD857072S1 (en) * | 2016-01-22 | 2019-08-20 | Symbotic, LLC | Automated guided vehicle |
| EP3258433A1 (en) | 2016-06-17 | 2017-12-20 | Starship Technologies OÜ | Method and system for delivering items |
| US11880784B2 (en) | 2016-08-05 | 2024-01-23 | Starship Technologies Oü | System and mobile freight station and method for distribution, delivery, and collection of freight |
| EP3330908A1 (en) | 2016-12-02 | 2018-06-06 | Starship Technologies OÜ | System and method for securely delivering packages to different delivery recipients with a single vehicle |
| WO2018108832A1 (en) | 2016-12-14 | 2018-06-21 | Starship Technologies Oü | Robot, system and method detecting and/or responding to transitions in height |
| WO2018129740A1 (zh) * | 2017-01-16 | 2018-07-19 | 浙江国自机器人技术有限公司 | 一种机器人搬运货物的方法 |
| USD879173S1 (en) * | 2017-02-14 | 2020-03-24 | Beijing Jingdong Shangke Information Technology Co, Ltd | Shuttle vehicle |
| USD871474S1 (en) * | 2017-02-17 | 2019-12-31 | Safelog Gmbh | Automated guided vehicle |
| US10538421B2 (en) | 2017-05-05 | 2020-01-21 | Atlantic Corporation | Systems, devices, and methods for inventory management of carpet rolls in a warehouse |
| WO2018206514A1 (en) | 2017-05-11 | 2018-11-15 | Starship Technologies Oü | A signalling device and system for increasing visibility of a mobile robot |
| EP3631363A1 (en) | 2017-05-24 | 2020-04-08 | Starship Technologies OÜ | Device and method for detection and localization of vehicles |
| WO2018215581A1 (en) | 2017-05-26 | 2018-11-29 | Starship Technologies Oü | A battery and a system for swapping and/or charging a battery of a mobile robot |
| WO2018215579A1 (en) | 2017-05-26 | 2018-11-29 | Starship Technologies Oü | A device, method and system for swapping and/or charging a battery of a mobile robot |
| EP3659104B1 (en) | 2017-07-28 | 2024-01-17 | Starship Technologies OÜ | Device and system for secure package delivery by a mobile robot |
| US10766699B2 (en) * | 2017-08-31 | 2020-09-08 | Alert Innovation Inc. | Order fulfillment robot capable of horizontal and vertical motion |
| US10282995B2 (en) | 2017-09-05 | 2019-05-07 | Starship Technologies Oü | Mobile robot having collision avoidance system for crossing a road from a pedestrian pathway |
| US10246277B1 (en) | 2017-09-11 | 2019-04-02 | Lightning Source LLC | System and apparatus for print media manufacturing buffering and sorting, and corresponding method thereof |
| EP3682385A1 (en) | 2017-09-15 | 2020-07-22 | Starship Technologies OÜ | System and method for item delivery by a mobile robot |
| US11117743B2 (en) | 2017-09-28 | 2021-09-14 | Symbotic Llc | Storage and retrieval system |
| WO2019068634A1 (en) | 2017-10-02 | 2019-04-11 | Starship Technologies Oü | DEVICE AND METHOD FOR DISTRIBUTING ARTICLES CONSUMABLE BY A MOBILE ROBOT |
| WO2019086465A1 (en) | 2017-11-02 | 2019-05-09 | Starship Technologies Oü | Visual localization and mapping in low light conditions |
| US10343286B2 (en) | 2017-12-01 | 2019-07-09 | Starship Technologies Oü | Storage system, use and method with robotic parcel retrieval and loading onto a delivery vehicle |
| US10346987B1 (en) * | 2017-12-29 | 2019-07-09 | Datalogic Usa, Inc. | Locating objects on surfaces |
| CN110342164B (zh) * | 2018-04-02 | 2021-09-03 | 北京京东乾石科技有限公司 | 出库设备及出库方法 |
| CN108615307B (zh) * | 2018-04-11 | 2021-08-10 | 上海工程技术大学 | 一种同步移动存储装置 |
| EP3788573B1 (en) * | 2018-04-30 | 2023-06-07 | Cargo Sous Terrain AG | Transport, storage and sequencing system for goods |
| USD891493S1 (en) * | 2018-05-15 | 2020-07-28 | Beijing Jingdong Shangke Information Technology Co., Ltd. | Shuttle car for automatic storage system |
| WO2019224162A1 (en) | 2018-05-22 | 2019-11-28 | Starship Technologies Oü | Method and system for analyzing robot surroundings |
| CN110599698A (zh) | 2018-06-13 | 2019-12-20 | 菜鸟智能物流控股有限公司 | 货物存取柜以及利用其收取和发放货物的方法 |
| US10947060B2 (en) * | 2018-06-26 | 2021-03-16 | Symbolic Llc | Vertical sequencer for product order fulfillment |
| US10769587B2 (en) | 2018-07-02 | 2020-09-08 | Walmart Apollo, Llc | Systems and methods of storing and retrieving retail store product inventory |
| US11097895B1 (en) * | 2018-07-13 | 2021-08-24 | Vecna Robotics, Inc. | System and method of providing delivery of items from one container to another container |
| CN109095160B (zh) * | 2018-08-16 | 2020-08-28 | 深圳蓝胖子机器人有限公司 | 货物安全输送装置及具有安全机制的货物输送系统 |
| EP3841516A1 (en) | 2018-08-22 | 2021-06-30 | Starship Technologies OÜ | Method and system for traffic light signal detection and usage |
| TWI689877B (zh) * | 2018-09-14 | 2020-04-01 | 財團法人工業技術研究院 | 揀貨及補貨方法、揀貨台車以及揀貨及補貨系統 |
| US11220400B2 (en) | 2019-01-17 | 2022-01-11 | Target Brands, Inc. | Material storage and sortation system |
| US11004033B1 (en) | 2019-02-04 | 2021-05-11 | Vecna Robotics, Inc. | System and method of asynchronous and automated order fulfillment |
| US11319151B2 (en) * | 2019-02-08 | 2022-05-03 | Abb Schweiz Ag | Automated storage and retrieval system |
| WO2020200854A1 (en) | 2019-04-01 | 2020-10-08 | Starship Technologies Oü | System and method for vending items |
| CN110104358B (zh) * | 2019-04-15 | 2020-10-30 | 珠海格力智能装备有限公司 | 一种立体仓库出入库控制方法、装置及系统 |
| WO2020229451A1 (en) | 2019-05-16 | 2020-11-19 | Starship Technologies Oü | Method, robot and system for interacting with actors or item recipients |
| US11208272B2 (en) * | 2019-06-27 | 2021-12-28 | Amazon Technologies, Inc. | Automated item sortation and container handling systems |
| TWI695805B (zh) * | 2019-08-14 | 2020-06-11 | 力晶積成電子製造股份有限公司 | 貨物搬運系統及貨物搬運方法 |
| EP3782932B1 (de) * | 2019-08-23 | 2021-10-06 | Jungheinrich Aktiengesellschaft | Stapellageranordnung |
| DE102019129124B4 (de) * | 2019-10-29 | 2021-06-17 | Audi Ag | Flexibles Kommissionierspeichersystem für Behälter unterschiedlicher Dimensionierung |
| US20220198389A1 (en) * | 2020-12-23 | 2022-06-23 | Mintron Energy Technology Co., Ltd. | Reconfigurable Decentralized Freight Shipping system and Method of Operation Thereof |
| US11358510B1 (en) | 2021-03-08 | 2022-06-14 | Ford Global Technologies, Llc | Lift assembly for a delivery vehicle |
| WO2022213131A1 (en) * | 2021-04-02 | 2022-10-06 | Symbotic Llc | Warehousing system for storing and retrieving goods in containers |
| US20230069056A1 (en) * | 2021-08-24 | 2023-03-02 | Symbotic Llc | Autonomous transport vehicle |
| JP2023044014A (ja) * | 2021-09-17 | 2023-03-30 | 株式会社豊田自動織機 | 物品探索装置、及び物品探索方法 |
| US11897546B2 (en) | 2021-09-24 | 2024-02-13 | Ford Global Technologies, Llc | Retention assembly for a delivery vehicle |
| EP4186820A1 (en) * | 2021-11-26 | 2023-05-31 | Fameccanica.Data S.p.A. | A method for automatically handling a plurality of product containers and a related system |
| US20230219756A1 (en) * | 2022-01-11 | 2023-07-13 | Lineage Logistics, LLC | Multi-Level Conveying Systems for Storage Facilities |
| CN116280828B (zh) * | 2023-03-28 | 2023-09-01 | 人维自动化(北京)有限公司 | 一种货品管理方法、装置、电子设备及存储介质 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0169156A1 (fr) * | 1984-06-14 | 1986-01-22 | REDOUTE CATALOGUE Société Anonyme: | Chariot automoteur de manutention robotisé |
| WO2004103883A1 (de) * | 2003-05-20 | 2004-12-02 | TGW Transportgeräte GmbH | Teleskopschubarm, insbesondere für ein lastaufnahmemittel |
| GB2407565A (en) * | 2003-10-25 | 2005-05-04 | Hewlett Packard Development Co | Mobile picker, storage structure and storage system |
| WO2014145450A1 (en) * | 2013-03-15 | 2014-09-18 | Symbotic Llc | Automated storage and retrieval system |
Family Cites Families (160)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2945604A (en) | 1958-02-10 | 1960-07-19 | Speed Park Inc | Transferring apparatus |
| US2996621A (en) | 1958-04-01 | 1961-08-15 | Jr Arthur M Barrett | Electronic steering for industrial trucks |
| US3455468A (en) | 1966-07-25 | 1969-07-15 | Triax Co | Automatic warehouse control for storing loads of varying size |
| JPS4723489Y1 (zh) | 1968-05-13 | 1972-07-27 | ||
| US3554390A (en) | 1968-12-16 | 1971-01-12 | Triax Co | Warehouse system with automatic means to selectively transfer a single or plurality of articles |
| US3629792A (en) | 1969-01-28 | 1971-12-21 | Bunker Ramo | Wire seals |
| US3677421A (en) | 1969-08-20 | 1972-07-18 | Cutler Hammer Inc | Storage courier boundary control system |
| US3737056A (en) | 1971-04-19 | 1973-06-05 | Conco Inc | Plural number control system for an automatic warehouse |
| US3802580A (en) | 1973-02-22 | 1974-04-09 | Supreme Equip & Syst | Means for selectively removing a preselected number of articles from an inventory storage means |
| US3970840A (en) | 1974-07-16 | 1976-07-20 | Lear Siegler, Inc. | Control circuitry for vehicle guidance mechanism |
| US4001139A (en) | 1975-01-15 | 1977-01-04 | Beckman Instruments, Inc. | Liquid scintillation solution |
| US4406570A (en) | 1980-09-30 | 1983-09-27 | Burlington Industries, Inc. | Materials handling system |
| US4428708A (en) | 1980-12-31 | 1984-01-31 | Midwest Conveyor Co., Inc. | Apparatus and method for fine positioning a vehicle at a storage bin in an automatic storage and retrieval system |
| US4492504A (en) | 1981-12-07 | 1985-01-08 | Bell & Howell Company | Materials handling system |
| FR2535293A1 (fr) | 1982-10-28 | 1984-05-04 | Socar | Procede et installation pour le stockage d'objets a manutention automatisee |
| DE3408081A1 (de) | 1984-03-05 | 1985-09-19 | Siemens AG, 1000 Berlin und 8000 München | Kommissioniereinrichtung |
| US4716530A (en) | 1984-05-21 | 1987-12-29 | Kabushiki Kaisha Meidensha | System for automatically controlling movement of unmanned vehicle and method therefor |
| US4692876A (en) | 1984-10-12 | 1987-09-08 | Hitachi, Ltd. | Automatic freight stacking system |
| US5282712A (en) | 1985-05-13 | 1994-02-01 | Computer Aided Systems, Inc. | Organizer system and method for a rotatable storage structure |
| US5472309A (en) | 1985-05-13 | 1995-12-05 | Computer Aided Systems, Inc. | System for delivery |
| US5273392A (en) | 1986-01-02 | 1993-12-28 | Computer Aided Systems, Inc. | Automated work center and method |
| EP0235488B1 (fr) | 1986-09-19 | 1990-01-24 | REDOUTE CATALOGUE Société Anonyme: | Installation de manutention robotisée |
| US4786229A (en) | 1986-04-30 | 1988-11-22 | Henderson Thomas R | Document storage and retrieval apparatus and method |
| US5380139A (en) | 1986-06-30 | 1995-01-10 | Kone Oy | Load handling method and system |
| WO1988005018A1 (en) | 1986-12-25 | 1988-07-14 | Kabushikikaisha Itoki Kosakusho | Automatic storing and retrieving apparatus for articles |
| US4811229A (en) | 1987-01-05 | 1989-03-07 | Hewlett-Packard Company | Control system for automatic guided vehicles |
| US4936738A (en) | 1988-04-26 | 1990-06-26 | Food Plant Engineering, Inc. | Alternating push back selective rack storage system |
| US5179329A (en) | 1989-04-25 | 1993-01-12 | Shinko Electric Co., Ltd. | Travel control method, travel control device, and mobile robot for mobile robot systems |
| US5134940A (en) | 1989-10-13 | 1992-08-04 | Daifuku Co., Ltd. | Self-propelled platform car type conveying system |
| CA2042133C (en) | 1990-07-10 | 1997-09-09 | Hiroaki Kita | Equipment for transporting a load |
| FR2670237B1 (fr) | 1990-12-10 | 1993-02-12 | Ebstein Simon | Installation mecanisee a gestion entierement automatisee pour le stockage d'objets, notamment de vehicules automobiles. |
| DE4104527A1 (de) | 1991-02-14 | 1992-08-20 | Knapp Logistik Automation | Vorrichtung und verfahren zum kommissionieren von stueckgut |
| KR960005533B1 (ko) | 1991-05-22 | 1996-04-26 | 가부시끼가이샤 다이후꾸 | 입출고용 전차 이용의 자동창고 |
| ES2094297T3 (es) | 1991-06-28 | 1997-01-16 | Kao Corp | Metodo para el almacenado de objetos. |
| FR2685306B1 (fr) | 1991-12-24 | 1996-06-21 | Etude Mecanisation Automatisat | Magasin de stockage automatise et nouveau type de chariot permettant la mise en place ou l'extraction des produits a l'interieur des zones de stockage. |
| US5379229A (en) | 1992-06-18 | 1995-01-03 | Communications Test Design, Inc. | Automated storage and retrieval system |
| SE501477C2 (sv) | 1993-07-22 | 1995-02-27 | Apogeum Ab | Förfarande och anordning för styrning av AGV för val av väg vid övergång mellan skilda, icke fast relaterade arbetsområden |
| FR2710092B1 (fr) | 1993-09-15 | 1995-10-13 | Ebstein Simon | Installation mécanisée automatique de stockage d'objets notamment de voitures. |
| KR0183454B1 (ko) | 1993-10-07 | 1999-04-15 | 마스다 쇼오이치로오 | 실어서 이송하는 장치 |
| WO1995034491A1 (en) | 1994-06-16 | 1995-12-21 | Macgregor (Fin) Oy | Four-chain paternoster cargo handling system |
| JP3003913B2 (ja) | 1994-07-26 | 2000-01-31 | 矢崎総業株式会社 | 防水コネクタハウジングの製造方法およびその方法に用いるハウジング並びに装置 |
| US5525884A (en) | 1995-02-10 | 1996-06-11 | Yazaki Industrial Chemical Co., Ltd. | Automatically guided vehicle |
| FR2730715B1 (fr) | 1995-02-22 | 1997-04-04 | Gec Alsthom Syst Et Serv | Chariot automoteur et magasin de stockage desservi par de tels chariots |
| FR2732958B1 (fr) | 1995-04-11 | 1997-05-09 | Gec Alsthom Syst Et Serv | Chariot automoteur a fourches telescopiques pour la desserte d'un magasin de stockage de charges sur palettes et magasin de stockage |
| US5529165A (en) | 1995-07-27 | 1996-06-25 | St. Onge Company | Carousel storage conveyor |
| US5764014A (en) | 1996-02-01 | 1998-06-09 | Mannesmann Dematic Rapistan Corp. | Automated guided vehicle having ground track sensor |
| US6036427A (en) | 1996-05-29 | 2000-03-14 | Daifuku Co., Ltd. | Guided vehicle system for transporting loads |
| US5908283A (en) | 1996-11-26 | 1999-06-01 | United Parcel Service Of Americia, Inc. | Method and apparatus for palletizing packages of random size and weight |
| US5833431A (en) | 1997-03-04 | 1998-11-10 | Rosse, Iii; Sammy A. | Warehouse truck attachment and method for the transportation and storage of compressible items |
| US6061607A (en) | 1997-07-18 | 2000-05-09 | St. Onge Company | Order pick system |
| US5988306A (en) | 1997-08-29 | 1999-11-23 | Yazaki Industrial Chemical Co., Ltd. | Automatically guided vehicle |
| US6272406B2 (en) | 1998-03-09 | 2001-08-07 | Jervis B. Webb Company | Guidance system for an automated guided-vehicle |
| DE19857886A1 (de) | 1998-12-15 | 2000-06-29 | Johann W Grond | Verfahren und Lagersystem zum Ein- und Auslagern von Lasten |
| US6341269B1 (en) | 1999-01-26 | 2002-01-22 | Mercani Technologies, Inc. | System, method and article of manufacture to optimize inventory and merchandising shelf space utilization |
| US6325586B1 (en) | 1999-12-08 | 2001-12-04 | Protosight, Inc. | Automated storage and retrieval system |
| US6345217B1 (en) | 2000-03-31 | 2002-02-05 | Rapistan Systems Advertising Corp. | Automated guided vehicle (AGV) with bipolar magnet sensing |
| AU2001253279A1 (en) | 2000-04-09 | 2001-10-23 | Robert D. Lichti Sr. | Moving crank mechanism |
| US6409451B1 (en) | 2000-04-13 | 2002-06-25 | Ibp, Inc. | Item handler and method for flow through storage |
| DE20011661U1 (de) | 2000-07-05 | 2000-12-21 | Wagner Rudolf M | Vorrichtung zum unsortierten Lagern von Waren oder sonstigen Gegenständen unterschiedlicher Abmessungen |
| US6629502B2 (en) | 2000-09-14 | 2003-10-07 | Daifuku Co., Ltd. | Conveyance system |
| DE10142395C5 (de) | 2001-05-03 | 2009-07-30 | Dematic Gmbh & Co. Kg | Lager- und Transportsystem in modularer Bauweise |
| US6721638B2 (en) | 2001-05-07 | 2004-04-13 | Rapistan Systems Advertising Corp. | AGV position and heading controller |
| US20030033217A1 (en) | 2001-05-18 | 2003-02-13 | International Business Machines Corporation | Method and system for mapping shelf space |
| JP4675002B2 (ja) * | 2001-06-29 | 2011-04-20 | 株式会社イトーキ | 自動倉庫の入出庫制御装置及び入出庫制御方法 |
| NL1018629C2 (nl) | 2001-07-25 | 2003-01-28 | Petrus Adrianus La Leerintveld | Magazijnsysteem en werkwijze voor het tijdelijk opslaan van artikelen. |
| DE10136354B4 (de) * | 2001-07-26 | 2010-06-17 | Knapp Ag | Verfahren und Anlage zum Kommissionieren mit einem Behälterregal und zugeordnetem Regalbediengerät |
| US6729836B2 (en) | 2002-03-13 | 2004-05-04 | Stingel, Iii Frederick J. | Automated container storage and delivery system |
| US6923612B2 (en) | 2002-03-29 | 2005-08-02 | TGW Transportgeräte GmbH & Co. KG | Load-handling system and telescopic arm therefor |
| US7734495B2 (en) | 2002-04-23 | 2010-06-08 | Kimberly-Clark Worldwide, Inc. | Methods and system for allocating shelf space |
| AU2003231430B8 (en) | 2002-05-13 | 2009-07-30 | Bakvertisi Limited | Apparatus for transporting containers |
| US6748292B2 (en) | 2002-07-15 | 2004-06-08 | Distrobot Systems, Inc. | Material handling method using autonomous mobile drive units and movable inventory trays |
| US6895301B2 (en) | 2002-07-15 | 2005-05-17 | Distrobot Systems, Inc. | Material handling system using autonomous mobile drive units and movable inventory trays |
| US6950722B2 (en) | 2002-07-15 | 2005-09-27 | Distrobot Systems, Inc. | Material handling system and method using mobile autonomous inventory trays and peer-to-peer communications |
| JP2004083249A (ja) | 2002-08-28 | 2004-03-18 | Nippon Yusoki Co Ltd | 移載装置 |
| JP3910129B2 (ja) | 2002-09-30 | 2007-04-25 | 株式会社イトーキ | 自動倉庫 |
| US20040238326A1 (en) | 2002-10-08 | 2004-12-02 | Wayne Lichti | Method and apparatus for material handling and storage |
| US7931431B2 (en) | 2003-05-06 | 2011-04-26 | Bec Companies, Inc. | Automated material handling system with load transfer vehicles |
| US7458683B2 (en) | 2003-06-16 | 2008-12-02 | Amo Manufacturing Usa, Llc | Methods and devices for registering optical measurement datasets of an optical system |
| US7121427B2 (en) | 2003-07-22 | 2006-10-17 | Scriptpro Llc | Fork based transport storage system for pharmaceutical unit of use dispenser |
| US7991505B2 (en) | 2003-08-29 | 2011-08-02 | Casepick Systems, Llc | Materials-handling system using autonomous transfer and transport vehicles |
| JP3102245U (ja) | 2003-12-12 | 2004-07-02 | ジェイ建築システム株式会社 | 繊維シートを用いた建築部材の接合構造 |
| GB0405014D0 (en) | 2004-03-05 | 2004-04-07 | Qinetiq Ltd | Movement control system |
| CA2561968A1 (en) | 2004-04-02 | 2005-10-20 | Marcus C. Minges | System for storage and retrieval of warehousable objects |
| US7266422B1 (en) | 2004-04-09 | 2007-09-04 | Fanuc Robotics America, Inc. | Automated palletizing cases having mixed sizes and shapes |
| ATE386696T1 (de) | 2004-05-21 | 2008-03-15 | Kht Kommissionier & Handhabung | Verfahren und vorrichtung zur automatisierten einlagerung von waren |
| SE0402030L (sv) | 2004-08-16 | 2006-02-17 | Moving Ab | System och förfarande för lagerhantering |
| US7402018B2 (en) | 2004-10-14 | 2008-07-22 | Kiva Systems, Inc. | Inventory system with mobile drive unit and inventory holder |
| FI126245B (fi) | 2005-03-09 | 2016-08-31 | Konecranes Finland Oy | Menetelmä paletittoman tavarakollin sijoittamiseksi ja luovuttamiseksi varastohyllystä ja kollien logistiikan hallitsemiseksi sekä laitteisto menetelmän toteuttamiseksi |
| JP4732796B2 (ja) * | 2005-05-18 | 2011-07-27 | 株式会社シーエックスカーゴ | 仕分け装置 |
| US8483869B2 (en) | 2005-07-19 | 2013-07-09 | Amazon Technologies, Inc. | Method and system for fulfilling requests in an inventory system |
| US7894933B2 (en) | 2005-07-19 | 2011-02-22 | Kiva Systems, Inc. | Method and system for retrieving inventory items |
| US20070068700A1 (en) | 2005-09-26 | 2007-03-29 | Ddk Ltd. | Electric contact and method for producing the same and connector using the electric contacts |
| JP4232112B2 (ja) | 2005-09-29 | 2009-03-04 | 株式会社ダイフク | 物品搬送設備 |
| US7826919B2 (en) | 2006-06-09 | 2010-11-02 | Kiva Systems, Inc. | Method and system for transporting inventory items |
| US8649899B2 (en) | 2006-06-19 | 2014-02-11 | Amazon Technologies, Inc. | System and method for maneuvering a mobile drive unit |
| US7912574B2 (en) | 2006-06-19 | 2011-03-22 | Kiva Systems, Inc. | System and method for transporting inventory items |
| US8220710B2 (en) | 2006-06-19 | 2012-07-17 | Kiva Systems, Inc. | System and method for positioning a mobile drive unit |
| US7495561B2 (en) | 2006-08-25 | 2009-02-24 | International Business Machines Corporation | Item position indicator and optimized item retrieval for a sensor equipped storage unit |
| US7850413B2 (en) | 2007-01-05 | 2010-12-14 | Kiva Systems, Inc. | System and method for transporting inventory items |
| DE102007005561B4 (de) | 2007-01-24 | 2009-11-26 | SSI Schäfer Noell GmbH Lager- und Systemtechnik | Kommissioniersystem mit Regaltransporteinheit und Verfahren zum Betreiben eines solchen Systems |
| US20080215180A1 (en) | 2007-03-02 | 2008-09-04 | Rao Kota | Arrangement for dynamic lean replenishment and methods therefor |
| CN100577583C (zh) | 2007-08-03 | 2010-01-06 | 白冬生 | 液体注气系统 |
| AT506284A1 (de) | 2007-12-21 | 2009-07-15 | Tgw Mechanics Gmbh | Verfahren zum einlagern von ladehilfsmitteln und transportvorrichtung |
| AT506221B1 (de) | 2008-01-11 | 2009-07-15 | Tgw Mechanics Gmbh | Verfahren und transportvorrichtung zum positionieren von ladehilfsmitteln vor deren übergabe in ein regalfach |
| WO2009139859A1 (en) | 2008-05-12 | 2009-11-19 | John Corcoran | High density storage facility |
| ITMC20080107A1 (it) | 2008-06-09 | 2009-12-10 | Qs Group Spa | Dispositivo e metodo per prelievo, movimentazione e deposito di colli in un magazino automatizzato. |
| US8894344B2 (en) | 2008-08-22 | 2014-11-25 | Applied Materials, Inc. | Vertical wafer buffering system |
| JP5432917B2 (ja) | 2008-10-27 | 2014-03-05 | デマティック アカウンティング サービシーズ ゲーエムベーハー | 立体自動倉庫用の移載シャトル |
| DE102009011300B4 (de) | 2009-03-02 | 2022-08-11 | Kuka Roboter Gmbh | Beladung von Lademitteln mit Paketen mittels Manipulator |
| US9321591B2 (en) | 2009-04-10 | 2016-04-26 | Symbotic, LLC | Autonomous transports for storage and retrieval systems |
| TWI615337B (zh) | 2009-04-10 | 2018-02-21 | 辛波提克有限責任公司 | 自動化貨箱儲存系統及處理被建構成托板化負荷以在儲存設施往返運送的貨箱之方法 |
| DE102009033697A1 (de) | 2009-07-17 | 2011-01-27 | Knapp Ag | Verfahren und Lagersystem zum Lagern und Kommissionieren von Artikeln |
| DE102010009873A1 (de) | 2010-02-23 | 2011-08-25 | SSI Schäfer Noell GmbH Lager- und Systemtechnik, 97232 | Lastaufnahmevorrichtung für ein Regalbediengerät, Regalbediengerät und Lagersystem |
| JP5513930B2 (ja) | 2010-03-03 | 2014-06-04 | デマティック アカウンティング サービシーズ ゲーエムベーハー | 立体自動倉庫 |
| CN103003174B (zh) | 2010-03-12 | 2015-05-06 | 西姆伯蒂克有限责任公司 | 补货和订单履行系统 |
| TWI451042B (zh) | 2010-03-26 | 2014-09-01 | Nat Applied Res Laboratories | 三維光場的控制裝置及其控制方法 |
| JP5656053B2 (ja) * | 2010-07-22 | 2015-01-21 | 株式会社ダイフク | 装置搬入方法 |
| US20120191517A1 (en) | 2010-12-15 | 2012-07-26 | Daffin Jr Mack Paul | Prepaid virtual card |
| US9187244B2 (en) | 2010-12-15 | 2015-11-17 | Symbotic, LLC | BOT payload alignment and sensing |
| US9499338B2 (en) | 2010-12-15 | 2016-11-22 | Symbotic, LLC | Automated bot transfer arm drive system |
| US9561905B2 (en) | 2010-12-15 | 2017-02-07 | Symbotic, LLC | Autonomous transport vehicle |
| US9475649B2 (en) | 2010-12-15 | 2016-10-25 | Symbolic, LLC | Pickface builder for storage and retrieval systems |
| TWI713813B (zh) | 2010-12-15 | 2020-12-21 | 美商辛波提克有限責任公司 | 具有自動運輸機器位置感測的儲存與取出系統及其操作方法 |
| US10822168B2 (en) | 2010-12-15 | 2020-11-03 | Symbotic Llc | Warehousing scalable storage structure |
| US8998554B2 (en) | 2010-12-15 | 2015-04-07 | Symbotic Llc | Multilevel vertical conveyor platform guides |
| US11078017B2 (en) | 2010-12-15 | 2021-08-03 | Symbotic Llc | Automated bot with transfer arm |
| KR102256081B1 (ko) * | 2010-12-15 | 2021-05-26 | 심보틱 엘엘씨 | 저장을 위한 상품 유니트들의 그룹을 만들기 위한 장치 |
| US9008884B2 (en) | 2010-12-15 | 2015-04-14 | Symbotic Llc | Bot position sensing |
| US8965619B2 (en) | 2010-12-15 | 2015-02-24 | Symbotic, LLC | Bot having high speed stability |
| WO2012086164A1 (ja) * | 2010-12-24 | 2012-06-28 | 川崎重工業株式会社 | 搬送ロボット、その基板搬送方法、及び基板搬送中継装置 |
| DE102011012424B4 (de) | 2011-02-21 | 2012-10-25 | SSI Schäfer Noell GmbH Lager- und Systemtechnik | Lager- und Kommissioniersystem mit Shuttle |
| NL1038714C2 (nl) | 2011-03-30 | 2012-10-02 | Ferdar Automation Technology Nederland B V | Opslag- en/of orderverzamelsysteem. |
| DE102011050437A1 (de) | 2011-05-17 | 2012-11-22 | Swisslog Ag | Verfahren zum Lagern und/oder Kommissionieren von Wareneinheiten |
| CA2836933C (en) * | 2011-06-24 | 2019-10-08 | Mitchell Weiss | Robot-enabled case picking |
| DE102011106677B4 (de) | 2011-07-05 | 2013-04-25 | SSI Schäfer Noell GmbH Lager- und Systemtechnik | System und Verfahren zum Ein- und Auslagern eines Lagerguts in ein und aus einem Regal |
| TWI622540B (zh) | 2011-09-09 | 2018-05-01 | 辛波提克有限責任公司 | 自動化儲存及取放系統 |
| AU2011377786A1 (en) | 2011-09-28 | 2014-01-09 | Dematic Systems Gmbh | Multi-tier automated warehouse |
| DE102011084551A1 (de) | 2011-10-14 | 2013-04-18 | Krones Aktiengesellschaft | Regalbediengerät und Kommissionierlager |
| EP2780263B1 (en) | 2011-11-20 | 2016-08-03 | Illinois Tool Works Inc. | Storage system and methods |
| CN102887319A (zh) | 2012-09-25 | 2013-01-23 | 江苏绿蓝清环保设备有限公司 | 一种仓储输送系统及其输送方法 |
| US20140100999A1 (en) * | 2012-10-04 | 2014-04-10 | Amazon Technologies, Inc. | Filling an order at an inventory pier |
| JP6072512B2 (ja) | 2012-11-02 | 2017-02-01 | 花王株式会社 | 容器入り歯磨組成物 |
| US20140197171A1 (en) | 2013-01-17 | 2014-07-17 | Michael Taylor | Dispensing Container with Elevating Platform |
| CN203294644U (zh) | 2013-05-17 | 2013-11-20 | 昆明欧迈科技有限公司 | 一种密集式双向穿梭车自动存取仓储物流装置 |
| US20140350717A1 (en) * | 2013-05-24 | 2014-11-27 | Dematic Corp. | Order fulfillment method |
| JP6102603B2 (ja) | 2013-07-24 | 2017-03-29 | 日産自動車株式会社 | 燃料電池システムのタンク搭載ユニット |
| US20150098775A1 (en) | 2013-10-09 | 2015-04-09 | Sergey N. Razumov | Automatic order picking system and method in retail facility |
| US20150225187A1 (en) | 2014-02-11 | 2015-08-13 | Sergey N. Razumov | Multi-level storage system with transportation devices movable in substantially perpendicular directions and method of transferring containers in desired sequence |
| CN203794044U (zh) | 2014-04-04 | 2014-08-27 | 无锡普智联科高新技术有限公司 | 一种高效物流仓储系统 |
| MX2017000178A (es) | 2014-07-08 | 2017-04-25 | Dematic Corp | Configuracion de elevacion para almacen basado en carretillas. |
| US20160016731A1 (en) | 2014-07-16 | 2016-01-21 | Sergey N. Razumov | Loading desired container sequence onto board of container carriage in storage system |
| AU2015301231B2 (en) * | 2014-08-04 | 2019-08-29 | Dematic Corp. | Order fulfillment technique |
| US9505556B2 (en) | 2014-09-03 | 2016-11-29 | Ottos Consultants Ltd. | Storage system using lifting mechanism for collecting containers in desired sequence |
| US9409728B2 (en) * | 2014-11-03 | 2016-08-09 | Bastian Solutions, Llc | Automated case flow buffer |
| US9884719B2 (en) | 2014-12-12 | 2018-02-06 | Symbotic, LLC | Storage and retrieval system |
| US10102496B2 (en) | 2015-01-16 | 2018-10-16 | Symbotic, LLC | Storage and retrieval system |
| US10974897B2 (en) | 2015-01-16 | 2021-04-13 | Symbotic Llc | Storage and retrieval system |
| US9856083B2 (en) | 2015-01-16 | 2018-01-02 | Symbotic, LLC | Storage and retrieval system |
| US10214355B2 (en) | 2015-01-16 | 2019-02-26 | Symbotic, LLC | Storage and retrieval system |
| US9850079B2 (en) | 2015-01-23 | 2017-12-26 | Symbotic, LLC | Storage and retrieval system transport vehicle |
-
2016
- 2016-01-18 US US14/997,920 patent/US9856083B2/en active Active
- 2016-01-19 WO PCT/US2016/013877 patent/WO2016115565A1/en active Application Filing
- 2016-01-19 JP JP2017537461A patent/JP6902470B2/ja active Active
- 2016-01-19 KR KR1020247003552A patent/KR20240017136A/ko active Application Filing
- 2016-01-19 CA CA2974039A patent/CA2974039C/en active Active
- 2016-01-19 CN CN201680016181.4A patent/CN107531411B/zh active Active
- 2016-01-19 KR KR1020177022873A patent/KR102632968B1/ko active IP Right Grant
- 2016-01-19 EP EP16703665.6A patent/EP3245145A1/en active Pending
-
2017
- 2017-12-20 US US15/848,809 patent/US10155623B2/en active Active
-
2018
- 2018-12-17 US US16/222,283 patent/US10850921B2/en active Active
-
2021
- 2021-03-23 JP JP2021049125A patent/JP7275183B2/ja active Active
-
2023
- 2023-05-02 JP JP2023076213A patent/JP2023099175A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0169156A1 (fr) * | 1984-06-14 | 1986-01-22 | REDOUTE CATALOGUE Société Anonyme: | Chariot automoteur de manutention robotisé |
| WO2004103883A1 (de) * | 2003-05-20 | 2004-12-02 | TGW Transportgeräte GmbH | Teleskopschubarm, insbesondere für ein lastaufnahmemittel |
| GB2407565A (en) * | 2003-10-25 | 2005-05-04 | Hewlett Packard Development Co | Mobile picker, storage structure and storage system |
| WO2014145450A1 (en) * | 2013-03-15 | 2014-09-18 | Symbotic Llc | Automated storage and retrieval system |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016115565A4 (en) | 2016-09-09 |
| US20180111756A1 (en) | 2018-04-26 |
| JP7275183B2 (ja) | 2023-05-17 |
| EP3245145A1 (en) | 2017-11-22 |
| JP2023099175A (ja) | 2023-07-11 |
| US10155623B2 (en) | 2018-12-18 |
| JP2021100888A (ja) | 2021-07-08 |
| KR20170103964A (ko) | 2017-09-13 |
| US10850921B2 (en) | 2020-12-01 |
| CA2974039A1 (en) | 2016-07-21 |
| US20190202635A1 (en) | 2019-07-04 |
| KR102632968B1 (ko) | 2024-02-05 |
| JP6902470B2 (ja) | 2021-07-14 |
| US9856083B2 (en) | 2018-01-02 |
| JP2018502027A (ja) | 2018-01-25 |
| KR20240017136A (ko) | 2024-02-06 |
| CA2974039C (en) | 2022-02-22 |
| CN107531411A (zh) | 2018-01-02 |
| WO2016115565A1 (en) | 2016-07-21 |
| US20160207710A1 (en) | 2016-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107531411B (zh) | 储存和取回系统 | |
| CN107428465B (zh) | 储存和取回系统 | |
| KR102470253B1 (ko) | 입출고 시스템 | |
| US11634279B2 (en) | Storage and retrieval system | |
| US11623822B2 (en) | Storage and retrieval system | |
| CN112638794A (zh) | 用于产品订单履行的竖直排序器 | |
| CN116096657A (zh) | 用于在容器中存储和取回货物的仓储系统 | |
| TWI707814B (zh) | 自動儲存及取回系統之儲存陣列 | |
| EP3245146A1 (en) | Storage and retrieval system | |
| TW201641389A (zh) | 儲存及取回系統 | |
| CN113830474B (zh) | 储存和取回系统 | |
| TWI711569B (zh) | 儲存及取回系統和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |