WO2023112212A1 - 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 - Google Patents
運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 Download PDFInfo
- Publication number
- WO2023112212A1 WO2023112212A1 PCT/JP2021/046297 JP2021046297W WO2023112212A1 WO 2023112212 A1 WO2023112212 A1 WO 2023112212A1 JP 2021046297 W JP2021046297 W JP 2021046297W WO 2023112212 A1 WO2023112212 A1 WO 2023112212A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- driver
- situation
- driving
- support
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/02—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver
- B60K28/06—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver responsive to incapacity of driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/3415—Dynamic re-routing, e.g. recalculating the route when the user deviates from calculated route or after detecting real-time traffic data or accidents
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/172—Classification, e.g. identification
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/46—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for vehicle-to-vehicle communication [V2V]
Definitions
- a computer program applied to a driving assistance device that assists driving of a vehicle Determining whether or not the vehicle is impeding traffic; and determining whether or not the driver of the vehicle is aware of the situation when it is determined that the vehicle is obstructing traffic;
- a computer program for executing a process including setting a support operation for avoiding the situation based on the recognition state of the situation by the driver, and a recording medium recording the computer program are provided.
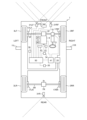
- the vehicle 1 includes forward shooting cameras 31LF and 31RF, rear shooting camera 31R, LiDAR (Light Detection And Ranging) 31S, in-vehicle shooting camera 33, biosensor 34, vehicle state sensor 35, GPS (Global Positioning System) sensor 37, It has a vehicle-to-vehicle communication unit 39 , a navigation system 40 and an HMI (Human Machine Interface) 43 .
- GPS Global Positioning System
- the biosensor 34 detects the biometric information of the driver and transmits the detected data to the driving support device 50 .
- the biosensor 34 may be, for example, a radio Doppler sensor for detecting the driver's heartbeat, or a non-wearable pulse sensor for detecting the driver's pulse.
- the biosensor 34 may be an electrode set embedded in the steering wheel 13 for measuring the heartbeat or electrocardiogram of the driver.
- the biosensor 34 may be a pressure measuring instrument embedded in the driver's seat to measure the seat pressure distribution when the driver is seated on the seat.
- the biosensor 34 may be a displacement sensor that detects changes in seat belt position to measure the heartbeat or respiration of the driver.
- the biosensor 34 may be a TOF (Time of Flight) sensor for detecting information on the position of the driver.
- the biosensor 34 may be a thermography for measuring the surface temperature of the driver's skin.
- FIG. 3 shows a flowchart showing a main routine of processing executed by the control unit 51 .
- the driver determination section 61 of the control section 51 executes processing for identifying the driver of the own vehicle 1 (step S13). For example, the driver determination unit 61 executes processing for recognizing the face of the driver sitting in the driver's seat based on the image data transmitted from the in-vehicle camera 33 . The driver determination unit 61 also extracts the feature amount of the recognized driver's face, and determines whether information on the driver matching the extracted feature amount is recorded in the driver database 71 .
- the support processing unit 65 outputs a command signal to the HMI 45 or the audio device to generate a preliminary notification sound (step S49).
- the preliminary notification sound to be generated is an effect sound that does not include information that the vehicle 1 is being driven while driving, and is output for the purpose of raising the driver's declining consciousness level.
- a preliminary notification may be made by lighting an LED lamp or the like instead of the preliminary notification sound, or together with the preliminary notification sound.
- step S29 determines that the in-vehicle system has stopped. It is determined whether or not (step S33). When the in-vehicle system stops (S33/Yes), the control unit 51 terminates the processing operation. On the other hand, if the in-vehicle system is not stopped (S33/No), the process returns to step S17, and the control unit 51 executes the processing of each step described above.
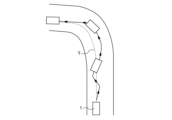
- the technology of the present disclosure can be applied in a situation where an emergency vehicle is approaching from behind the own vehicle 1. Even in such a situation, the assistance operation for avoiding the traffic obstruction situation is set based on the driver's recognition state, and the driver can give way to the emergency vehicle without feeling annoyed.
- vehicle-own vehicle 31: ambient environment sensor, 33: in-vehicle camera, 34: biological sensor, 35: vehicle state sensor, 37: GPS sensor, 39: vehicle-to-vehicle communication unit, 40: navigation system, 41: Vehicle control device, 50: driving support device, 51: control unit, 53: storage unit, 61: driver determination unit, 62: acquisition unit, 63: traffic condition determination unit, 64: driver state determination unit, 65: support processing unit , 71: driver database
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/248,993 US12198449B2 (en) | 2021-12-15 | 2021-12-15 | Driving assistance apparatus, computer program, and recording medium storing computer program |
| JP2023567394A JP7610039B2 (ja) | 2021-12-15 | 2021-12-15 | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
| DE112021008519.0T DE112021008519T5 (de) | 2021-12-15 | 2021-12-15 | Fahrunterstützungsvorrichtung, computerprogramm und aufzeichnungsmedium, das das computerprogramm speichert |
| PCT/JP2021/046297 WO2023112212A1 (ja) | 2021-12-15 | 2021-12-15 | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/046297 WO2023112212A1 (ja) | 2021-12-15 | 2021-12-15 | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023112212A1 true WO2023112212A1 (ja) | 2023-06-22 |
Family
ID=86773844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/046297 Ceased WO2023112212A1 (ja) | 2021-12-15 | 2021-12-15 | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12198449B2 (https=) |
| JP (1) | JP7610039B2 (https=) |
| DE (1) | DE112021008519T5 (https=) |
| WO (1) | WO2023112212A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20230349704A1 (en) * | 2022-04-29 | 2023-11-02 | Rivian Ip Holdings, Llc | Adas timing adjustments and selective incident alerts based on risk factor information |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001331900A (ja) * | 2000-05-23 | 2001-11-30 | Matsushita Electric Ind Co Ltd | 車載危険予測警報装置および危険予測警報方法 |
| JP2008084004A (ja) * | 2006-09-27 | 2008-04-10 | Mazda Motor Corp | 車両用運転支援システム |
| JP2012058827A (ja) * | 2010-09-06 | 2012-03-22 | Denso Corp | 運転支援装置 |
| JP2019117624A (ja) * | 2017-12-27 | 2019-07-18 | 株式会社デンソー | 車載装置、通信システム、および動機付けシステム |
| JP2021051655A (ja) * | 2019-09-26 | 2021-04-01 | いすゞ自動車株式会社 | 通知装置及び通知方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9205816B2 (en) * | 2011-07-11 | 2015-12-08 | Toyota Jidosha Kabushiki Kaisha | Vehicle emergency evacuation device |
| JP6511930B2 (ja) * | 2015-04-16 | 2019-05-15 | 株式会社デンソー | 退避走行支援装置 |
| US11249544B2 (en) * | 2016-11-21 | 2022-02-15 | TeleLingo | Methods and systems for using artificial intelligence to evaluate, correct, and monitor user attentiveness |
| JP6665831B2 (ja) | 2017-05-19 | 2020-03-13 | トヨタ自動車株式会社 | 退避走行支援装置 |
| KR20190050633A (ko) * | 2017-11-03 | 2019-05-13 | 주식회사 만도 | 운전자 상태 기반 차량 제어 시스템 및 방법 |
| JP2019119371A (ja) | 2018-01-09 | 2019-07-22 | 三菱自動車工業株式会社 | 煽り運転解消システム |
| US11487968B2 (en) * | 2019-12-16 | 2022-11-01 | Nvidia Corporation | Neural network based facial analysis using facial landmarks and associated confidence values |
| US11745733B2 (en) * | 2020-01-27 | 2023-09-05 | Mazda Motor Corporation | Travel control apparatus for vehicle, vehicle controlling method and computer program therefor |
-
2021
- 2021-12-15 JP JP2023567394A patent/JP7610039B2/ja active Active
- 2021-12-15 WO PCT/JP2021/046297 patent/WO2023112212A1/ja not_active Ceased
- 2021-12-15 US US18/248,993 patent/US12198449B2/en active Active
- 2021-12-15 DE DE112021008519.0T patent/DE112021008519T5/de active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001331900A (ja) * | 2000-05-23 | 2001-11-30 | Matsushita Electric Ind Co Ltd | 車載危険予測警報装置および危険予測警報方法 |
| JP2008084004A (ja) * | 2006-09-27 | 2008-04-10 | Mazda Motor Corp | 車両用運転支援システム |
| JP2012058827A (ja) * | 2010-09-06 | 2012-03-22 | Denso Corp | 運転支援装置 |
| JP2019117624A (ja) * | 2017-12-27 | 2019-07-18 | 株式会社デンソー | 車載装置、通信システム、および動機付けシステム |
| JP2021051655A (ja) * | 2019-09-26 | 2021-04-01 | いすゞ自動車株式会社 | 通知装置及び通知方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240378903A1 (en) | 2024-11-14 |
| JPWO2023112212A1 (https=) | 2023-06-22 |
| JP7610039B2 (ja) | 2025-01-07 |
| DE112021008519T5 (de) | 2025-02-27 |
| US12198449B2 (en) | 2025-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10875545B2 (en) | Autonomous driving system | |
| JP6269360B2 (ja) | 運転支援システム及び運転支援方法 | |
| JP6369487B2 (ja) | 表示装置 | |
| JP6937335B2 (ja) | 車両制御システム | |
| US20240000354A1 (en) | Driving characteristic determination device, driving characteristic determination method, and recording medium | |
| JP7151495B2 (ja) | 自動運転システム | |
| JP5401961B2 (ja) | 操舵支援装置 | |
| WO2014148025A1 (ja) | 走行制御装置 | |
| CN110192084A (zh) | 自动驾驶辅助装置、方法及程序 | |
| JP2017151703A (ja) | 自動運転装置 | |
| KR101552017B1 (ko) | 성능이 개선된 운전보조시스템 및 그 제어방법 | |
| CN113393664B (zh) | 驾驶辅助装置 | |
| CN111746389A (zh) | 车辆控制系统 | |
| JP2022047580A (ja) | 情報処理装置 | |
| WO2018163549A1 (ja) | 運転制御動作支援装置、運転制御動作支援方法及び運転制御動作支援プログラム | |
| EP3566921B1 (en) | Providing relevant alerts to a driver of a vehicle | |
| JP7610039B2 (ja) | 運転支援装置及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 | |
| JP6648551B2 (ja) | 自動運転装置 | |
| JP2023160512A (ja) | 感情判別装置 | |
| JP7652855B2 (ja) | 移動体予測装置、交通安全支援システム、及びコンピュータプログラム | |
| JP7750701B2 (ja) | 運転支援装置及びコンピュータプログラム | |
| JP7564383B2 (ja) | 運転技能評価システム、情報処理装置、車両及びコンピュータプログラム並びにコンピュータプログラムを記録した記録媒体 | |
| KR101511859B1 (ko) | 차선 인식이 향상된 운전보조시스템 및 그 제어방법 | |
| KR20230106207A (ko) | 적어도 하나 이상의 모드에 따라, 제어되는 차량 및 방법 | |
| JP6520554B2 (ja) | 情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21968127 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023567394 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112021008519 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21968127 Country of ref document: EP Kind code of ref document: A1 |
|
| WWP | Wipo information: published in national office |
Ref document number: 112021008519 Country of ref document: DE |