WO2021245746A1 - ロボットのプログラミング装置 - Google Patents
ロボットのプログラミング装置 Download PDFInfo
- Publication number
- WO2021245746A1 WO2021245746A1 PCT/JP2020/021601 JP2020021601W WO2021245746A1 WO 2021245746 A1 WO2021245746 A1 WO 2021245746A1 JP 2020021601 W JP2020021601 W JP 2020021601W WO 2021245746 A1 WO2021245746 A1 WO 2021245746A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- program
- editable
- display unit
- unit
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F8/00—Arrangements for software engineering
- G06F8/30—Creation or generation of source code
- G06F8/34—Graphical or visual programming
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/409—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by using manual data input [MDI] or by using control panel, e.g. controlling functions with the panel; characterised by control panel details or by setting parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39438—Direct programming at the console
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40392—Programming, visual robot programming language
Definitions
- This disclosure relates to a robot programming device.
- a robot programming device is known in which icons representing functions constituting a control program for a robot are combined and arranged (see, for example, Patent Document 1).
- a program that combines icons is easy for beginners to understand, but it is difficult to create an advanced program.
- Icon supports a small number of instructions, it is difficult to express advanced instructions concisely and graphically, and the program becomes complicated when many simple instructions are combined. be. Therefore, it is desirable to be able to create a program containing advanced instructions while facilitating programming by using graphical program elements such as icons.
- One aspect of the present disclosure is a storage unit that stores a plurality of types of program elements that graphically represent the functions constituting the control program of the robot, an input unit that accepts an operation by the user, and the program stored in the storage unit.
- a program generation unit that generates the control program by selecting and combining elements by the input unit is provided, and the function can be edited by a character string input by the input unit in at least one of the program elements. It is a robot programming device equipped with editable program elements.
- FIG. 1 shows the programming apparatus of the robot which concerns on one Embodiment of this disclosure. It is a figure which shows the display example of the 1st area on the monitor of the program generation part provided in the programming apparatus of FIG. It is a figure which shows the display example when the MOVE block is dragged and dropped from the 1st area to the 2nd area on the monitor of the program generation part provided in the programming apparatus of FIG. It is a figure which shows the display example when the target position block is dragged and dropped from the 1st area to the 2nd area on the monitor of FIG. It is a figure which shows the display example of the 1st to 3rd area in the state which selected the CODE block arranged in the 2nd area on the monitor of FIG.
- the programming device 1 of the robot 100 according to the present embodiment is provided in, for example, a control device 200 for controlling the robot 100.
- the programming device 1 may be provided separately from the control device 200.
- the programming device 1 includes a storage unit 2 that stores a plurality of types of program blocks (program elements) 10, 20, 30, and 40, which will be described later, an input unit 3 that accepts operations by the user, and a program generation unit 4. ..
- the storage unit 2 is a memory
- the input unit 3 is an input device such as a keyboard, a mouse, and a touch panel.
- the program generation unit 4 includes a processor and a monitor 5, and controls by displaying the program blocks 10, 20, 30, and 40 stored in the storage unit 2 on the monitor 5 and selecting and combining them by the input unit 3. Generate a program.
- the program generation unit 4 has a first area (first display unit) 6, a second area (second display unit) 7, and a third area (third display unit) on the monitor 5. Part) 8 and.
- the program blocks 10, 20, 30, and 40 stored in the storage unit 2 are displayed in a selectable manner by the input unit 3.
- the selected program block 10 is duplicated (hatching occurs in the selected program block 10). (Attached).
- the control program is combined with other program blocks 20, 30 and 40. Is configured.
- the program elements graphically represent the functions that make up the control program of the robot 100, have configurable parameters, and are non-editable elements that can realize simple functions.
- the MOVE block 10 which is one of the program blocks, is an element that operates the robot 100 so as to move the TCP (tool tip point) of the robot 100 to the target position.
- the MOVE block 10 can be combined with, for example, another program block, the target position block 20 and the passing point block 30, as parameters.
- Each program block 10, 20, 30, 40 is provided with connection portions 11, 12, 13, 21, 22, 31, 32, 41, 42 like the unevenness of a jigsaw puzzle, and one program block 10, 20, 30 is provided.
- the concave connection portions 11, 12, 21, 31, 41 can be connected to the convex connection portions 13, 22, 32, 42 of the other program blocks 10, 20, 30, 40.
- the passing point block 30 can be combined with the MOVE block 10 together with the target position block 20 to set a passing point while moving TCP from the current position to the target position.
- the target position block 20 and the passing point block 30 can set the position coordinates as parameters.
- the programming device 1 of the robot 100 can edit at least one of the program blocks 10, 20, 30, and 40 with a function constituting a control program by a character string input by the input unit 3. It has an edit program block (editable program element).
- the editable program block is also displayed in the first area 6 like the other program blocks, and can be selected by the mouse, for example, and arranged in the second area 7 by dragging and dropping.
- the CODE block 40 which is one of the editable program blocks, is selected by the input unit 3 in a state of being displayed in the first area 6 or the second area 7 on the monitor 5, as shown in FIG.
- the content is displayed editably in the third area 8. That is, when the editable program block is selected, the contents are displayed in the third area 8 on the monitor 5.
- the third area 8 is in a blank state.
- Complex instructions can be described in the editable program block. Examples of complicated instructions include interpolation instructions and conditional branch instructions.
- multiple instructions can be described in the editable program block.
- a plurality of operations can be described in one program block.
- the user can input the functions constituting the control program by the character string according to the predetermined programming language by using the input unit 3, for example, the keyboard.
- the CODE block 40 whose contents have been edited can be registered as one of the program blocks 10, 20, 30, and 40 by giving a new name and dragging and dropping it into the first area 6.
- a control program can be generated in the second area 7.
- the generated control program is stored in the storage unit 2.
- the control unit 210 provided in the control device 200 reads out the control program stored in the storage unit 2, generates an operation control signal, and outputs the operation control signal to the robot 100.
- a control program is created only by selecting the program blocks displayed in the first region 6 and arranging them in the second region 7. be able to. Then, by making one or more of the program blocks 10, 20, 30, and 40 to be arranged an editable program block (here, CODE block 40), advanced instructions that are difficult to express with a simple program block are controlled. It has the advantage that it can be included in the program.
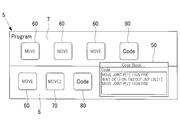
- program blocks 10, 20, 30, and 40 are exemplified as program elements that graphically represent the functions constituting the control program of the robot 100, but icons may be adopted instead of the program blocks 10, 20, 30, and 40. good. By arranging the icons in a predetermined order, they can function in the same manner as the program blocks 10, 20, 30, and 40.
- the program icons (icons) 60, 70, 80 displayed in the first area 6 of the monitor 5 are selected by the input unit 3 and selected in the second area 7. Place the program icons 60 and 80. Then, when the Code icon 80 is selected as the program icon that is the editable program icon (editable program element), a window (third display unit) 50 that displays the contents in the vicinity of the selected Code icon 80 is displayed. Display in a pop-up. Further, as shown in FIG. 7, when the Code icon 80 arranged in the second area 7 is selected, the Code icon 80, which is an editable program icon, may be enlarged and displayed in the area of the first area 6. good.
- a first region 6 for arranging the program blocks 10, 20, 30, and 40 and a third region 8 different from the second region 7 for forming the control program are provided on the monitor 5. It was decided to display the contents of the editable program block when it was selected. Instead, when the CODE block 40, which is an editable program block, is selected as shown in FIG. 8, the selected CODE block 40, which is an editable program block, is enlarged and displayed in the second area 7. A window (third display unit) for displaying the contents may be formed inside the program. The selected program block 40 is indicated by a thick line.
- a window (third display unit) 50 for displaying the contents thereof is pop-up displayed in the vicinity of the selected editable program block 40. You may. Since it is not necessary to provide the third area 8 on the monitor 5 by the enlarged display of the editable program block 40 or the pop-up display of the window 50, a wide display area of the first area 6 and the second area 7 should be secured. Can be done.
- the executed program block 40 becomes another program block. It may be displayed so as to be identifiable by a display mode different from that of 10 and 40. Examples of the identifiable display mode include highlight display, underlined display, framed display, and display with different display colors.
- the program block 40 being executed is an editable program block
- it may include a fourth area (fourth display unit) 9 for displaying the contents of the editable program block 40.
- FIG. 10 shows a case where the fourth region 9 is common to the third region 8, but it may be provided separately.
- the instruction executed in the content displayed in the fourth area 9 is displayed so as to be distinguishable from other instructions. May be good. This makes it possible to visually confirm the program block 40 and / or the instruction being executed.
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manufacturing & Machinery (AREA)
- Human Computer Interaction (AREA)
- Numerical Control (AREA)
- Stored Programmes (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080101554.4A CN115697646A (zh) | 2020-06-01 | 2020-06-01 | 机器人的编程装置 |
| PCT/JP2020/021601 WO2021245746A1 (ja) | 2020-06-01 | 2020-06-01 | ロボットのプログラミング装置 |
| US17/928,387 US12346672B2 (en) | 2020-06-01 | 2020-06-01 | Robot programming device |
| DE112020006874.9T DE112020006874T5 (de) | 2020-06-01 | 2020-06-01 | Roboterprogrammierungsvorrichtung |
| JP2022529146A JPWO2021245746A1 (https=) | 2020-06-01 | 2020-06-01 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/021601 WO2021245746A1 (ja) | 2020-06-01 | 2020-06-01 | ロボットのプログラミング装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021245746A1 true WO2021245746A1 (ja) | 2021-12-09 |
Family
ID=78830940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/021601 Ceased WO2021245746A1 (ja) | 2020-06-01 | 2020-06-01 | ロボットのプログラミング装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12346672B2 (https=) |
| JP (1) | JPWO2021245746A1 (https=) |
| CN (1) | CN115697646A (https=) |
| DE (1) | DE112020006874T5 (https=) |
| WO (1) | WO2021245746A1 (https=) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023162164A1 (ja) * | 2022-02-25 | 2023-08-31 | 三菱電機株式会社 | 教示支援装置、作業システム、教示支援方法および教示支援プログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04507022A (ja) * | 1989-10-17 | 1992-12-03 | アプライド バイオシステムズ インコーポレイテッド | ロボットインターフェース |
| JPH08249026A (ja) * | 1995-03-10 | 1996-09-27 | Fanuc Ltd | ロボットを含むシステムのプログラミング方法 |
| JP2003067007A (ja) * | 2001-08-27 | 2003-03-07 | Mitsubishi Electric Corp | エンジニアリングツール及びエンジニアリングシステム |
| US20070150102A1 (en) * | 2005-12-09 | 2007-06-28 | Joong Ki Park | Method of supporting robot application programming and programming tool for the same |
| WO2020012558A1 (ja) * | 2018-07-10 | 2020-01-16 | 三菱電機株式会社 | 教示装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3136055B2 (ja) | 1994-09-29 | 2001-02-19 | 株式会社堀場製作所 | 分析装置 |
| JPH08190417A (ja) | 1995-01-06 | 1996-07-23 | Mitsubishi Electric Corp | 数値制御装置 |
| JP2001353678A (ja) | 2000-06-12 | 2001-12-25 | Sony Corp | オーサリング・システム及びオーサリング方法、並びに記憶媒体 |
| JP2005148789A (ja) * | 2003-11-11 | 2005-06-09 | Fanuc Ltd | 音声入力によるロボット教示プログラム編集装置 |
| JP4657149B2 (ja) | 2006-05-26 | 2011-03-23 | 京セラミタ株式会社 | 画像形成装置用ユーザアプリケーション開発支援装置 |
| FR2946160B1 (fr) | 2009-05-26 | 2014-05-09 | Aldebaran Robotics | Systeme et procede pour editer et commander des comportements d'un robot mobile. |
| US8260460B2 (en) * | 2009-09-22 | 2012-09-04 | GM Global Technology Operations LLC | Interactive robot control system and method of use |
| JP5749594B2 (ja) * | 2011-07-26 | 2015-07-15 | シチズンホールディングス株式会社 | 工作機械用制御装置 |
| JP5702811B2 (ja) | 2013-01-30 | 2015-04-15 | ファナック株式会社 | 動作プログラム作成装置 |
| CN105338285B (zh) * | 2014-08-08 | 2018-11-06 | 华为技术有限公司 | 一种媒体内容更新的方法、装置及系统 |
| JP6400558B2 (ja) * | 2015-11-17 | 2018-10-03 | ファナック株式会社 | シーケンス制御プログラミング装置、シーケンス制御プログラミング方法及び作業システム |
| US10713015B2 (en) * | 2016-05-15 | 2020-07-14 | Servicenow, Inc. | Visual programming system |
| KR102645817B1 (ko) * | 2016-12-06 | 2024-03-08 | 한화로보틱스 주식회사 | 로봇의 비헤이비어 관리 방법 및 장치 |
| CN109508263B (zh) * | 2017-09-14 | 2022-05-27 | 佛山市顺德区顺达电脑厂有限公司 | 服务器系统及其检测方法 |
| US10916575B2 (en) | 2018-04-04 | 2021-02-09 | Samsung Electronics Co., Ltd. | Image sensor and method of manufacturing image sensor |
| KR102614907B1 (ko) | 2018-04-04 | 2023-12-19 | 삼성전자주식회사 | 이미지 센서 및 이미지 센서 제조 방법 |
| CN110497412A (zh) | 2019-08-26 | 2019-11-26 | 中科新松有限公司 | 基于网页和移动端的机器人图形化编程交互系统 |
| JP7440227B2 (ja) | 2019-08-28 | 2024-02-28 | ファナック株式会社 | ロボットプログラミング装置及びロボットプログラミング方法 |
| US20200167072A1 (en) * | 2020-02-02 | 2020-05-28 | Daniel MacKay | Accessible device and configuration method |
-
2020
- 2020-06-01 JP JP2022529146A patent/JPWO2021245746A1/ja active Pending
- 2020-06-01 WO PCT/JP2020/021601 patent/WO2021245746A1/ja not_active Ceased
- 2020-06-01 US US17/928,387 patent/US12346672B2/en active Active
- 2020-06-01 DE DE112020006874.9T patent/DE112020006874T5/de active Pending
- 2020-06-01 CN CN202080101554.4A patent/CN115697646A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04507022A (ja) * | 1989-10-17 | 1992-12-03 | アプライド バイオシステムズ インコーポレイテッド | ロボットインターフェース |
| JPH08249026A (ja) * | 1995-03-10 | 1996-09-27 | Fanuc Ltd | ロボットを含むシステムのプログラミング方法 |
| JP2003067007A (ja) * | 2001-08-27 | 2003-03-07 | Mitsubishi Electric Corp | エンジニアリングツール及びエンジニアリングシステム |
| US20070150102A1 (en) * | 2005-12-09 | 2007-06-28 | Joong Ki Park | Method of supporting robot application programming and programming tool for the same |
| WO2020012558A1 (ja) * | 2018-07-10 | 2020-01-16 | 三菱電機株式会社 | 教示装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023162164A1 (ja) * | 2022-02-25 | 2023-08-31 | 三菱電機株式会社 | 教示支援装置、作業システム、教示支援方法および教示支援プログラム |
| JPWO2023162164A1 (https=) * | 2022-02-25 | 2023-08-31 | ||
| JP7506180B2 (ja) | 2022-02-25 | 2024-06-25 | 三菱電機株式会社 | 教示支援装置、作業システム、教示支援方法および教示支援プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021245746A1 (https=) | 2021-12-09 |
| US20230099469A1 (en) | 2023-03-30 |
| DE112020006874T5 (de) | 2022-12-29 |
| US12346672B2 (en) | 2025-07-01 |
| CN115697646A (zh) | 2023-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109605366B (zh) | 机器人图形化编程交互系统及机器人 | |
| CN112698823B (zh) | 一种图形化的机器人编程交互系统及方法 | |
| JP4995071B2 (ja) | 処理システムをプログラミングする方法 | |
| JP6469162B2 (ja) | ロボットのオフライン教示装置 | |
| JP2007242054A (ja) | ロボット言語処理装置 | |
| WO1998040817A1 (en) | Visual programming method and its system | |
| JP2020146759A (ja) | 制御装置およびロボットシステム | |
| JP4322770B2 (ja) | 画面作成装置、画面作成プログラムおよびそれを記録した記録媒体 | |
| JP2005182125A (ja) | グラフ表示制御装置及びプログラム | |
| WO2021245746A1 (ja) | ロボットのプログラミング装置 | |
| JP6766779B2 (ja) | ユーザインタフェース開発支援装置、ユーザインタフェース開発支援方法、および、ユーザインタフェース開発支援プログラム | |
| JP6922431B2 (ja) | プログラム開発支援装置、プログラム開発支援方法、および、プログラム開発支援プログラム | |
| JP2009026239A (ja) | Gui編集装置、gui編集方法およびプログラム | |
| TWI569118B (zh) | 畫面作成軟體 | |
| KR20130040925A (ko) | 프로그램 작성 장치 및 화상 제어 시스템 | |
| JPH10291183A (ja) | ロボット言語処理装置 | |
| KR20170065405A (ko) | 원형 또는 폐곡선 형태의 도형을 이용한 반복적 루프 구조를 이용한 시인화와 조합 방식을 통한 그래픽스 기반 컴퓨터 언어 설계 및 사용자 인터페이스 장치 | |
| CN115292116A (zh) | 用于在工业应用中对过程信息进行可视化的系统和方法 | |
| JP4851390B2 (ja) | エディタ装置およびエディタプログラム | |
| JP4476223B2 (ja) | 画面データ作成装置、画面データの編集方法及び画面データ編集プログラム | |
| JP2023080596A (ja) | プログラム作成装置およびプログラム | |
| JP7779934B2 (ja) | 教示装置 | |
| JP7436796B2 (ja) | ロボットのプログラム作成支援装置 | |
| CN117349917B (zh) | 一种施工方案模拟系统、方法以及存储介质 | |
| JP2003140714A (ja) | 図形言語プログラム作成プログラム、及び図形言語プログラム作成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20939158 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022529146 Country of ref document: JP Kind code of ref document: A |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20939158 Country of ref document: EP Kind code of ref document: A1 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 17928387 Country of ref document: US |