WO2021106401A1 - Dispositif de propulsion de navire - Google Patents
Dispositif de propulsion de navire Download PDFInfo
- Publication number
- WO2021106401A1 WO2021106401A1 PCT/JP2020/038696 JP2020038696W WO2021106401A1 WO 2021106401 A1 WO2021106401 A1 WO 2021106401A1 JP 2020038696 W JP2020038696 W JP 2020038696W WO 2021106401 A1 WO2021106401 A1 WO 2021106401A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- propulsion
- machine
- machines
- propulsion machine
- control unit
- Prior art date
Links
- 238000001514 detection method Methods 0.000 claims abstract description 37
- 230000005856 abnormality Effects 0.000 claims description 43
- 230000002159 abnormal effect Effects 0.000 claims description 2
- 230000007257 malfunction Effects 0.000 abstract 5
- 230000001141 propulsive effect Effects 0.000 description 19
- 238000000034 method Methods 0.000 description 12
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000011065 in-situ storage Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/21—Control means for engine or transmission, specially adapted for use on marine vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/30—Monitoring properties or operating parameters of vessels in operation for diagnosing, testing or predicting the integrity or performance of vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/40—Monitoring properties or operating parameters of vessels in operation for controlling the operation of vessels, e.g. monitoring their speed, routing or maintenance schedules
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H20/00—Outboard propulsion units, e.g. outboard motors or Z-drives; Arrangements thereof on vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/06—Steering by rudders
- B63H25/08—Steering gear
- B63H25/14—Steering gear power assisted; power driven, i.e. using steering engine
- B63H25/18—Transmitting of movement of initiating means to steering engine
- B63H25/24—Transmitting of movement of initiating means to steering engine by electrical means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H20/00—Outboard propulsion units, e.g. outboard motors or Z-drives; Arrangements thereof on vessels
- B63H2020/003—Arrangements of two, or more outboard propulsion units
Definitions
- the present invention relates to a marine propulsion device.
- Patent Document 1 discloses a plurality of outboard motors that are propulsion devices of this type.
- each outboard motor is equipped with an engine and a propeller, and a propulsive force is generated by rotating the propeller by the driving force of the engine. Then, the direction of the propulsive force is changed by controlling the steering angle of each outboard motor by the steering device, and the traveling direction of the ship is changed accordingly.
- the steering device includes a main ECU and a steering ECU.
- the steering ECU monitors whether or not a failure has occurred in the steering angle control of each outboard motor. If a failure occurs in the steering angle control of any of the outboard motors, the steering ECU notifies the main ECU to that effect. As a result, the main ECU detects that a failure has occurred in the steering angle control of any of the outboard motors, and recognizes the outboard motor in which the steering angle control has a failure. Further, the main ECU controls the engine rotation speed by using the outboard motor ECU.
- the main ECU When a failure occurs in the steering angle control of any of the outboard motors, the main ECU generates propulsive force by the failed outboard motor for the failed outboard motor (failed outboard motor). Performs processing for forcibly stopping. Specifically, the main ECU fixes the engine rotation speed of the failed outboard motor to a predetermined idle rotation speed. Further, the main ECU limits the engine rotation speed of another normal outboard motor (outboard motor in which the steering angle control has not failed) to a predetermined speed limit or less.
- Patent Document 1 The configuration of Patent Document 1 is that when a failure occurs in the steering angle control of any of the outboard motors, the generation of propulsive force by the failed outboard motor is forcibly stopped, while the other normal ship. Maintain the generation of propulsion by all external units. Therefore, depending on the position of the failed outboard motor at the stern, the navigation will be continued in a state where the left-right balance of the propulsive force generated by the outboard motor is lost. For example, if the propeller mounted on the leftmost side fails, it depends on the other normal outboard motors, the propulsion machine mounted on the rightmost side and the propulsion machine placed in the center of the left and right. It will sail using propulsion. Therefore, navigation may become difficult after the outboard motor fails.
- the present invention has been made in view of the above circumstances, and an object of the present invention is that when a ship navigates by using a marine propulsion device equipped with three or more propulsion devices, an abnormality occurs in any of the propulsion devices. At that time, it is an object of the present invention to provide a marine propulsion device that facilitates the balance of the left and right propulsive forces with respect to the propulsive force generated by the marine propulsion device and facilitates the continuation of navigation.
- this marine propulsion device includes three or more propulsion machines, an abnormality detection unit, and a control unit.
- Three or more of the propulsion machines are attached to the hull of a ship.
- the abnormality detection unit can detect that an abnormality has occurred in each of the three or more propulsion machines.
- the control unit controls the three or more propulsion machines.
- the three or more propulsion machines are arranged symmetrically. When the abnormality detection unit detects that an abnormality has occurred in any of the three or more propulsion machines while the control unit is operating the three or more propulsion machines.
- the propulsion machine in which the occurrence of the abnormality was detected was stopped, and the propulsion machine in which the occurrence of the abnormality was detected was placed on the left side and the right side of the hull among the three or more propulsion machines. Stop at least one propulsion machine located on the side.
- At least one propulsion machine that is stopped when the propulsion machine in which the occurrence of the abnormality is detected is stopped has a symmetrical relationship with the propulsion machine in which the occurrence of the abnormality is detected. It is preferable to include the propulsion machine in.
- the propulsion units arranged symmetrically with the propulsion unit in which the occurrence of the abnormality is detected are stopped, so that it becomes easy to balance the left and right propulsion forces.
- the marine propulsion device described above preferably has the following configuration. That is, with respect to the three or more propulsion units, the control unit has detected that an abnormality has occurred in other operating propulsion machines other than the propulsion machine in which the occurrence of the abnormality has been detected. At that time, the other propulsion machine is stopped. When the number of propulsion units in operation becomes one as a result of stopping the other propulsion units, the control unit keeps the operation of the propulsion units in operation and / or abnormal. The operation of at least one propulsion machine that has been stopped without being detected is restarted. When the operating propulsion unit disappears, the control unit restarts the operation of at least one stopped propulsion unit without detecting the occurrence of an abnormality.
- the above-mentioned marine propulsion device can have the following configuration. That is, when the number of propulsion machines in operation becomes one as a result of stopping the other propulsion machines, the control unit maintains the operation of the propulsion machines in operation and causes an abnormality. Is not detected and the operation of at least one propulsion machine that has been stopped is restarted.
- the at least one propulsion machine that resumes the operation includes a propulsion machine that is arranged on the left side and the right side of the hull on the side opposite to the side where the operating propulsion machine is arranged.
- the above-mentioned marine propulsion device can have the following configuration. That is, when the number of propulsion machines in operation becomes one as a result of stopping the other propulsion machines, the control unit stops the operation of the propulsion machines in operation and causes an abnormality. Is not detected and the operation of at least one propulsion machine that has been stopped is restarted.
- a propulsion machine arranged closer to the center of the left and right sides of the hull than the propulsion machine can be operated.
- the balance between the left and right propulsive forces can be improved.
- the marine propulsion device described above preferably has the following configuration. That is, this marine propulsion device includes an odd number of the propulsion machines.
- One of the three or more propulsion machines is arranged at the center of the left and right sides of the hull.
- the control unit controls the one propulsion machine arranged at the left and right central portions of the hull independently of the other propulsion machines among the three or more propulsion machines.
- the marine propulsion device described above preferably has the following configuration. That is, the control unit stops the one propulsion machine when the abnormality detection unit detects that an abnormality has occurred in the one propulsion machine arranged at the left and right center portions of the hull. When the operating propulsion machine disappears as a result of stopping the one propulsion machine, the control unit restarts the operation of the stopped propulsion machine without detecting an abnormality.
- At least one propulsion unit can generate propulsive force and continue navigation.
- the schematic plan view which shows the overall structure of the ship provided with the ship propulsion device which concerns on 1st Embodiment of this invention.
- the flowchart which shows the process which the control part controls a propulsion machine based on the output result of a failure detection part.
- the schematic plan view which shows the overall structure of the ship provided with the ship propulsion device which concerns on 2nd Embodiment of this invention.
- a block diagram showing the electrical configuration of a ship. A flowchart showing a process in which the control unit controls the central propulsion machine based on the output result of the failure detection unit.
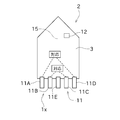
- FIG. 1 is a schematic plan view showing the overall configuration of a ship 2 provided with a ship propulsion device 1.
- FIG. 2 is a block diagram showing an electrical configuration of the ship 2.
- the ship 2 includes a hull 3.
- the ship 2 is provided with a ship propulsion device 1.
- the marine propulsion device 1 includes three or more propulsion devices 11 and a control unit 12. In this embodiment, four propulsion machines (even numbers) are provided.
- the four propulsion machines 11 include a first propulsion machine 11A, a second propulsion machine 11B, a third propulsion machine 11C, and a fourth propulsion machine 11D.
- the number of propulsion machines 11 is not particularly limited, and may be, for example, six or eight.
- the four propulsion machines 11 are provided at the stern of the ship 2. Each of the four propulsion units 11 is attached to the hull 3. The four propulsion machines 11 are arranged in the left-right direction. In the present embodiment, the first propulsion machine 11A, the second propulsion machine 11B, the third propulsion machine 11C, and the fourth propulsion machine 11D are arranged in order from the left side of the hull 3. The four propulsion machines 11 are arranged on both the left and right sides of the hull 3 with the central line 15 passing through the left and right central portions of the hull 3 interposed therebetween.
- propulsion machines 11 Of the four propulsion machines 11, two propulsion machines 11, specifically the first propulsion machine 11A and the second propulsion machine 11B, are arranged on the left side of the hull 3. The remaining two propulsion units 11, specifically the third propulsion unit 11C and the fourth propulsion unit 11D, are arranged on the right side of the hull 3.
- the four propulsion machines 11 are arranged symmetrically in a plan view with the center line 15 as the axis of symmetry. Specifically, the first propulsion machine 11A and the fourth propulsion machine 11D have a symmetrical correspondence relationship, and the second propulsion machine 11B and the third propulsion machine 11C have a symmetrical correspondence relationship.
- Each of the four propulsion machines 11 includes a drive source (engine and electric motor) and a screw. Each propulsion machine 11 can rotate the screw by the driving force of the driving source. The direction of the rotation axis of the screw can be changed around the vertical axis. The direction of the rotation axis of the screw, stop / forward rotation / reverse rotation, and rotation speed are controlled by the control unit 12.
- the control unit 12 can independently change these control parameters for each propulsion machine 11. By controlling each propulsion unit 11 by the control unit 12, it is possible to realize various maneuvers including the movement of the ship 2 in the front-rear direction, the translation in the lateral direction, the in-situ turning, and the like.
- Each propulsion unit 11 can be configured as a stern drive or an outboard motor.
- the configuration of each propulsion machine 11 is not particularly limited. In the present embodiment, the four propulsion machines 11 have substantially the same configuration.
- the control unit 12 is configured as a computer including a CPU, ROM, and RAM. Various programs including a program for operating each propulsion machine 11 are stored in the ROM. The CPU can read various programs and the like from the ROM and execute them. Then, by the cooperation of the above hardware and software, the control unit 12 can be operated as the failure detection unit (abnormality detection unit) 12a shown in FIG.
- the failure detection unit 12a monitors the communication state between the control unit 12 and a predetermined portion of each propulsion unit 11 connected to the control unit 12, and recognizes that a disconnection has occurred in the harness connecting the two based on the communication state. By doing so, it is detected that a failure (abnormality) has occurred in each propulsion machine 11.
- the configuration for the failure detection unit 12a to detect the failure of each propulsion unit 11 is not particularly limited, and for example, each propulsion unit is based on the detection value of the sensor group attached to the drive source of each propulsion unit 11. The failure that occurs in 11 may be detected.
- control unit 12 is connected to each of the four propulsion machines 11, the first propulsion machine 11A, the second propulsion machine 11B, the third propulsion machine 11C, and the fourth propulsion machine 11D. There is.
- the control unit 12 can control each propulsion machine 11 to stop or operate each propulsion machine 11.
- control unit 12 is connected to the first lever position sensor 21, the steering angle sensor 22, and the second lever position sensor 23.
- the first lever position sensor 21 detects the operating position of the throttle lever provided on the ship 2.
- the control unit 12 adjusts the operating state of the drive source of the propulsion machine 11 according to the operating position of the throttle lever operated by the operator (manipulator), and changes the rotation speed of the screw. As a result, the propulsion machine 11 can propel the ship 2.
- the steering angle sensor 22 detects the steering angle of the steering handle provided on the ship 2.
- the second lever position sensor 23 detects the operating position of the ship maneuvering lever provided on the ship 2.
- the control unit 12 changes the rotation angle (direction of the rotation axis of the screw) of the propulsion machine 11 according to the operation amount of the steering handle operated by the operator and / or the operation position of the second lever position sensor 23. As a result, the propulsion machine 11 can turn the ship 2.
- FIG. 3 is a flowchart showing a process in which the control unit 12 controls the propulsion machine 11 based on the output result of the failure detection unit 12a.
- the control unit 12 When the control unit 12 is operating each of the four propulsion machines 11, the first propulsion machine 11A, the second propulsion machine 11B, the third propulsion machine 11C, and the fourth propulsion machine 11D, that is, the ship 2.
- the four propulsion units 11 are controlled based on the output result of the failure detection unit 12a.
- the control unit 12 determines whether or not any of the four propulsion machines 11 has a failure (step S101). This determination is made based on the detection result of the failure detection unit 12a. That is, when the failure detection unit 12a detects that a failure has occurred in the propulsion device 11, the control unit 12 recognizes that the propulsion device 11 has failed.
- step S101 When it is determined that a failure has occurred in any of the four propulsion machines 11 (step S101, Yes), the control unit 12 stops the failed propulsion machine 11 (step S102). On the other hand, when it is determined that no failure has occurred in the four propulsion machines 11 (steps S101 and No), the process returns to step S101.
- the control unit 12 is at least one of the propulsion units 11 arranged on the left side and the right side of the hull 3 with respect to the side on which the failed propulsion unit 11 is arranged.
- the propulsion machine 11 is stopped (step S103).
- the propulsion machine 11 stopped here is a propulsion machine 11 (hereinafter, may be referred to as a normal propulsion machine 11) in which the occurrence of a failure has not been detected.
- the control unit 12 stops the second propulsion machine 11B and then the hull 3 At least one of the third propulsion machine 11C and the fourth propulsion machine 11D on the right side, which are the propulsion machines 11 arranged on the left and right sides of the above, is stopped.
- the propulsion machine 11 having a symmetrical relationship with the propulsion machine 11 is stopped almost at the same time as the failed propulsion machine 11 is stopped.
- the control unit 12 stops the second propulsion machine 11B and also stops the third propulsion machine 11C.
- the propulsion machines 11 that continue to operate are the first propulsion machine 11A and the fourth propulsion machine 11D.
- control unit 12 determines whether or not a failure has occurred in the other propulsion device 11 that continues to operate (step S104).
- step S104 When it is determined that a failure has occurred in any of the other propulsion machines 11 (step S104, Yes), the control unit 12 stops the other propulsion machine 11 (step S105). When it is determined that a failure has newly occurred in the fourth propulsion machine 11D while the second propulsion machine 11B and the third propulsion machine 11C are stopped as in the above example, the control unit 12 determines that a failure has occurred. 4 Stop the operation of the propulsion machine 11D. On the other hand, when it is determined that no failure has occurred in any of the other propulsion machines 11 (steps S104, No), the process returns to step S104.
- the control unit 12 determines whether there are two or more or less than two remaining operating propulsion machines (normal propulsion machines without failure) 11. Determine (step S106). In the present embodiment, the number of propulsion machines 11 is 4, and at the time of step S105, the number of propulsion machines 11 to be stopped is 3 out of the 4 propulsion machines 11. Since the number of the propulsion machines 11 in operation is one, in step S106, the control unit 12 always determines that the number of the remaining propulsion machines 11 in operation is less than two.
- step S108 the control unit 12 determines whether or not there is one propulsion machine 11 in operation. According to the above example, at the time of step S108, the number of propulsion machines 11 in operation is one. Therefore, the determination in step S108 is Yes.
- the control unit 12 continues the operation of one propulsion machine 11 in operation (step S109). That is, in principle, since the fourth propulsion machine 11D has a failure, it is considered that the first propulsion machine 11A on the opposite side to the failure should be stopped, but the only operating first propulsion machine 11A If you stop, you will not be able to navigate. Therefore, in this case, the operation of the first propulsion machine 11A is controlled so as not to be stopped.
- the control unit 12 may restart the normal operation of the propulsion machine 11 that has been stopped.
- the operation of the first propulsion machine 11A is continued in step S109, and the normal operation of the third propulsion machine 11C that was stopped in step S105 is restarted.
- the normal propulsion machine 11 for resuming the operation may be one propulsion machine arranged on the left side and the right side of the hull 3 on the side opposite to the side where the one operating propulsion machine 11 is arranged. preferable.
- the number of propulsion machines 11 is four. Since the operations of the three propulsion machines 11 are stopped from step S101 to step S105, the determination in step S106 is always No. However, when the number of propulsion machines 11 is 5 or more, the determination in step S106 may be Yes. In this case, the control unit 12 stops the operation of the propulsion machine 11 arranged on the opposite side of the failed propulsion machine 11 as in step S103 (step S107). After that, the process returns to step S104.
- the number of propulsion machines 11 is an even number (4). Therefore, if any of the propulsion machines 11 fails and the propulsion machine 11 is stopped together with the corresponding propulsion machine 11, the number of propulsion machines 11 that continue to operate is 4 to 2. In addition, it decreases while keeping an even number.
- the determination in step S108 is Yes. As a result, the process of step S109 described above is performed.
- the number of propulsion machines 11 is an odd number, for example, five.
- the number of propulsion machines 11 that continue to operate is from 5 to 3 or 3. It decreases while keeping an odd number, such as one. If there is only one propulsion machine 11 that continues to operate and a failure occurs in this only propulsion machine 11, the propulsion machine 11 is stopped in step S105. Since the operations of all the propulsion machines 11 have stopped, the determination in step S106 is No, and the determination in step S108 is also No. Therefore, the control unit 12 restarts the operation of at least one normal propulsion machine 11 that has been stopped (step S110).
- step S108 a state in which at least one normal propulsion machine 11 is operating is realized, and propulsion force can be secured. As a result, the navigation of the ship 2 can be continued.
- the marine propulsion device 1 of the present embodiment includes four propulsion devices 11, a failure detection unit 12a, and a control unit 12.
- the four propulsion machines 11 are attached to the hull 3 of the ship 2.
- the failure detection unit 12a can detect that a failure has occurred in each of the four propulsion machines 11.
- the control unit 12 controls four propulsion machines 11.
- the four propulsion machines 11 are arranged symmetrically. When the failure detection unit 12a detects that a failure has occurred in any of the four propulsion units 11 while the control unit 12 is operating the four propulsion units 11, a failure occurs. Stops the propulsion machine 11 in which is detected.
- control unit 12 is arranged on the left side and the right side of the hull 3 among the four propulsion units 11 on the side opposite to the side on which the propulsion unit 11 in which the occurrence of the failure is detected is arranged. Stop at least one propulsion machine 11.
- the propulsion machine 11 arranged on the left and right sides opposite to the propulsion machine 11 is stopped, so that the operator navigates while balancing the left and right propulsion forces. Will be easier to continue.
- At least one propulsion machine that is stopped when the propulsion machine 11 in which the occurrence of the failure is detected is stopped is symmetrical with the propulsion machine 11 in which the occurrence of the failure is detected. Includes the related propulsion machine 11.
- the propulsion machine 11 arranged symmetrically with the propulsion machine 11 in which the occurrence of the failure is detected is stopped, so that it becomes easy to balance the left and right propulsive forces.
- the control unit 12 has found that a failure has occurred in the four propulsion devices 11 other than the propulsion device 11 in which the failure has been detected. Is detected by the failure detection unit 12a, the other propulsion device 11 is stopped. When the number of operating propulsion units 11 becomes one as a result of stopping the other propulsion units 11 for which a failure is newly detected, the control unit 12 operates the propulsion units 11 during the operation. To maintain. In addition to or instead of maintaining the operation of the propulsion machine 11 during the operation, the operation of at least one propulsion machine 11 which has stopped without detecting the occurrence of a failure may be restarted. When the propulsion machine 11 in operation disappears as a result of stopping the propulsion machine 11 in which the failure is newly detected, the control unit 12 determines at least one propulsion machine that is stopped without detecting the occurrence of the failure. The operation of 11 is restarted.
- a failure occurs when the number of operating propulsion devices 11 becomes one as a result of stopping another propulsion device 11 in which a failure is newly detected. Can be modified to resume the operation of at least one propulsion machine 11 that has stopped without being detected. It is preferable that at least one propulsion machine 11 for resuming the operation includes a propulsion machine 11 arranged on the left side and the right side of the hull 3 on the side opposite to the side on which the operating propulsion machine 11 is arranged.
- FIG. 4 is a schematic plan view showing the overall configuration of the ship 2 provided with the ship propulsion device 1x according to the second embodiment.
- the same reference numerals may be given to the same or similar members as those in the above-described embodiment, and the description may be omitted.
- the marine propulsion device 1x of the present embodiment shown in FIG. 4 is different from the marine propulsion device 1 of the first embodiment in that it includes an odd number (5) of propulsion devices 11.
- One of the odd-numbered propulsion machines 11 is arranged at the center of the left and right sides of the hull 3.
- the propulsion machine 11 at the center of the left and right is controlled independently of the other propulsion machines 11.
- the five propulsion machines 11 have a first propulsion machine 11A, a second propulsion machine 11B, a third propulsion machine 11C, a fourth propulsion machine 11D, and a central propulsion machine 11E.
- the five propulsion machines 11 are arranged side by side in the left-right direction as in the first embodiment.
- the central propulsion machine 11E is arranged on the central line 15.
- four other propulsion machines 11 other than the central propulsion machine 11E are arranged on the left and right sides of the hull 3 with the central propulsion machine 11E in between.
- the first propulsion machine 11A and the second propulsion machine 11B are arranged on the left side of the hull 3.
- the third propulsion machine 11C and the fourth propulsion machine 11D are arranged on the right side of the hull 3.
- the first propulsion machine 11A and the fourth propulsion machine 11D have a symmetrical correspondence relationship with respect to the center line 15, and the second propulsion machine 11B and the third propulsion machine 11C have a symmetrical correspondence relationship with respect to the center line 15. Therefore, the five propulsion machines 11 are symmetrical.
- the central propulsion machine 11E is connected to the control unit 12 to which the four other propulsion machines 11 are connected.
- the control unit 12 controls the central propulsion machine 11E, and can stop or operate the central propulsion machine 11E.
- the central propulsion machine 11E is controlled by the control unit 12 independently of the other four propulsion machines 11. In other words, the central propulsion machine 11E is controlled regardless of the control status of the four other propulsion machines 11.
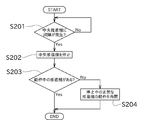
- FIG. 6 is a flowchart showing a process in which the control unit 12 controls the central propulsion machine 11E based on the output result of the failure detection unit 12a.
- the control unit 12 controls the four other propulsion units 11 other than the central propulsion unit 11E out of the five propulsion units 11 based on the output result of the failure detection unit 12a, as in the first embodiment. Do. Further, the control unit 12 controls the central propulsion machine 11E separately from the control of the other propulsion machines 11 during the operation of the central propulsion machine 11E.
- the control unit 12 determines whether or not a failure has occurred in the central propulsion machine 11E (step S201). This determination is made based on the detection result of the failure detection unit 12a. That is, when the failure detection unit 12a detects that a failure has occurred in the central propulsion machine 11E, the control unit 12 recognizes that the central propulsion machine 11E has failed.
- step S201 If it is determined that no failure has occurred in the central propulsion machine 11E (steps S201, No), the process returns to step S201.
- step S201 When it is determined that the central propulsion machine 11E has a failure (step S201, Yes), the control unit 12 stops the central propulsion machine 11E (step S202).
- control unit 12 determines whether or not there is a propulsion machine 11 in operation (step S203). That is, with respect to the four other propulsion machines 11, it is determined whether or not there is a propulsion machine 11 that has not been stopped.
- step S203 When it is determined that there is a propulsion machine 11 in operation (step S203, Yes), the control unit 12 ends the process. When it is determined that there is no propulsion machine 11 in operation (step S203, No), the control unit 12 restarts the operation of at least one normal propulsion machine 11 that is stopped (step S204). As a result, the propulsive force for the ship 2 can be reliably secured.
- the marine propulsion device 1x of the present embodiment includes an odd number (5) of propulsion devices 11.
- the central propulsion machine 11E which is one of the five propulsion machines 11, is arranged at the left and right central portions of the hull 3.
- the control unit 12 controls the central propulsion machine 11E independently of the other propulsion machines 11 among the five propulsion machines 11.
- the central propulsion machine 11E can be controlled. Therefore, the other propulsion device 11 can easily balance the left and right propulsive forces while continuing the navigation. Further, the strength of the propulsive force can be adjusted by the central propulsion machine 11E.
- the control unit 12 stops the central propulsion machine 11E when the failure detection unit 12a detects that a failure has occurred in the central propulsion machine 11E.
- the control unit 12 restarts the operation of at least one normal propulsion machine 11 that is stopped.
- At least one propulsion machine 11 can generate propulsive force to continue the navigation.
- the number of propulsion machines 11 is arbitrary as long as it is 3 or more, and may be an even number or an odd number.
- one propulsion machine 11 arranged at the left and right central portions of the hull 3 does not have to be controlled independently of the other propulsion machines 11.
- the state in which three or more propulsion units 11 are arranged symmetrically on the hull 3 refers only to a state in which one propulsion unit 11 is arranged symmetrically with respect to the other propulsion unit 11. However, it includes a state in which one propulsion machine 11 is arranged at a position slightly deviated from an accurate symmetrical position with respect to the other propulsion machine 11.
- the marine propulsion device 1 is provided with, for example, four propulsion machines 11, and since one of the propulsion machines 11 has a failure, the number of propulsion machines 11 that continue to operate is from four to two as in the above example. Suppose that the number is reduced to one. After that, consider a case where a failure occurs in any of the two operating propulsion machines 11 and the propulsion machine 11 is stopped, resulting in only one operating propulsion machine 11 remaining. In this case, both the failed propulsion machine 11 and the operating propulsion machine 11 may be stopped, and instead, the operation of at least one stopped normal propulsion machine 11 may be restarted.
- a propulsion machine 11 located closer to the center of the left and right sides of the hull 3 than the propulsion machine 11 which was normal and in operation is selected, thereby balancing the left and right sides. It is preferable because it can be easily obtained.
- the flowchart of FIG. 3 can handle both the case where the number of propulsion machines 11 is an even number and the case where the number of propulsion machines 11 is an odd number.
- This flowchart can be changed to a flowchart specialized when the number of propulsion machines 11 is an even number, or can be changed to a flowchart specialized when the number of propulsion machines 11 is an even number.
Landscapes
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Safety Devices In Control Systems (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Dispositif de propulsion de navire (1) comprenant au moins trois unités de propulsion (11), une unité de détection de dysfonctionnement (12a) et une unité de commande (12). L'unité de commande (12) commande les au moins trois unités de propulsion (11). Les au moins trois unités de propulsion (11) sont disposées avec une symétrie gauche-droite. Lorsqu'un dysfonctionnement est détecté dans l'une quelconque des au moins trois unités de propulsion (11) par l'unité de détection de dysfonctionnement (12a) tandis que les au moins trois unités de propulsion (11) sont en fonctionnement, l'unité de commande (12) arrête l'unité de propulsion (11) dans laquelle le dysfonctionnement a été détecté, et, sur un côté gauche et un côté droit d'une coque, arrête au moins une unité de propulsion (11) des unités de propulsion (11) disposées sur le côté opposé au côté sur lequel l'unité de propulsion (11) dans laquelle le dysfonctionnement a été détecté est disposée.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/780,918 US20220411031A1 (en) | 2019-11-29 | 2020-10-14 | Ship propulsion device |
| EP20891782.3A EP4067221A4 (fr) | 2019-11-29 | 2020-10-14 | Dispositif de propulsion de navire |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019215956A JP7348824B2 (ja) | 2019-11-29 | 2019-11-29 | 船舶用推進装置 |
| JP2019-215956 | 2019-11-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021106401A1 true WO2021106401A1 (fr) | 2021-06-03 |
Family
ID=76086744
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/038696 WO2021106401A1 (fr) | 2019-11-29 | 2020-10-14 | Dispositif de propulsion de navire |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220411031A1 (fr) |
| EP (1) | EP4067221A4 (fr) |
| JP (1) | JP7348824B2 (fr) |
| WO (1) | WO2021106401A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7501308B2 (ja) | 2020-10-28 | 2024-06-18 | スズキ株式会社 | 船舶推進システム |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022090257A (ja) * | 2020-12-07 | 2022-06-17 | ヤマハ発動機株式会社 | 操船システムおよび船舶 |
| US12065230B1 (en) | 2022-02-15 | 2024-08-20 | Brunswick Corporation | Marine propulsion control system and method with rear and lateral marine drives |
| US12110088B1 (en) | 2022-07-20 | 2024-10-08 | Brunswick Corporation | Marine propulsion system and method with rear and lateral marine drives |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62237034A (ja) * | 1986-04-08 | 1987-10-17 | Sanshin Ind Co Ltd | 船舶用推進機の警告装置 |
| JPH02256879A (ja) * | 1989-03-30 | 1990-10-17 | Sanshin Ind Co Ltd | 船舶推進機 |
| JP2005145439A (ja) * | 2003-10-22 | 2005-06-09 | Yamaha Motor Co Ltd | 推進力制御装置、それを備えた操船支援システムおよび船舶、ならびに推進力制御方法 |
| JP2008163864A (ja) * | 2006-12-28 | 2008-07-17 | Yamaha Marine Co Ltd | 推進機の制御装置 |
| JP2010143321A (ja) * | 2008-12-17 | 2010-07-01 | Yamaha Motor Co Ltd | 船外機制御装置およびそれを備えた船舶 |
| JP2014080082A (ja) | 2012-10-16 | 2014-05-08 | Yamaha Motor Co Ltd | 船舶用推進システムの運転方法、船舶用推進システムおよびそれを備えた船舶 |
| JP2016068579A (ja) * | 2014-09-26 | 2016-05-09 | 三菱重工業株式会社 | 垂直離着陸機、及び垂直離着陸機の制御方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4680869B2 (ja) * | 2006-11-20 | 2011-05-11 | 本田技研工業株式会社 | 船外機の制御装置 |
| JP5221244B2 (ja) * | 2008-08-22 | 2013-06-26 | ヤマハ発動機株式会社 | 船舶用電源システム、船舶用推進システムおよび船舶 |
| US8272906B2 (en) * | 2008-12-17 | 2012-09-25 | Yamaha Hatsudoki Kabushiki Kaisha | Outboard motor control device and marine vessel including the same |
| JP5351611B2 (ja) * | 2009-05-29 | 2013-11-27 | ヤマハ発動機株式会社 | 船舶制御システム、船舶推進システムおよび船舶 |
| US8406944B2 (en) * | 2010-02-10 | 2013-03-26 | Pierre Garon | Control system and method for starting and stopping marine engines |
| JP2013163439A (ja) * | 2012-02-10 | 2013-08-22 | Yamaha Motor Co Ltd | 船外機の制御システム |
| US9132903B1 (en) * | 2013-02-13 | 2015-09-15 | Brunswick Corporation | Systems and methods for laterally maneuvering marine vessels |
| JP2015229458A (ja) * | 2014-06-06 | 2015-12-21 | スズキ株式会社 | 船外機の識別番号設定装置及び識別番号設定方法 |
| US9764810B1 (en) * | 2015-06-23 | 2017-09-19 | Bruswick Corporation | Methods for positioning multiple trimmable marine propulsion devices on a marine vessel |
| US9598163B1 (en) * | 2016-01-22 | 2017-03-21 | Brunswick Corporation | System and method of steering a marine vessel having at least two marine drives |
| US10322787B2 (en) * | 2016-03-01 | 2019-06-18 | Brunswick Corporation | Marine vessel station keeping systems and methods |
| US10633072B1 (en) * | 2018-07-05 | 2020-04-28 | Brunswick Corporation | Methods for positioning marine vessels |
| JP2020101125A (ja) * | 2018-12-21 | 2020-07-02 | ヤマハ発動機株式会社 | 船舶推進機の制御装置およびそれを備えた船舶用推進システム、並びに船舶推進機のエンジン始動装置 |
| US11433981B2 (en) * | 2019-02-13 | 2022-09-06 | Marine Canada Acquisition Inc. | Electric actuator for a marine steering system, and methods of defining steering boundaries and determining drive mechanism failure thereof |
| US11312461B1 (en) * | 2019-10-29 | 2022-04-26 | Yamaha Hatsudoki Kabushiki Kaisha | Boat maneuvering control system for boat and boat maneuvering control method for boat |
| US11352118B1 (en) * | 2019-11-12 | 2022-06-07 | Brunswick Corporation | Marine propulsion control method and system |
-
2019
- 2019-11-29 JP JP2019215956A patent/JP7348824B2/ja active Active
-
2020
- 2020-10-14 EP EP20891782.3A patent/EP4067221A4/fr not_active Withdrawn
- 2020-10-14 US US17/780,918 patent/US20220411031A1/en active Pending
- 2020-10-14 WO PCT/JP2020/038696 patent/WO2021106401A1/fr unknown
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62237034A (ja) * | 1986-04-08 | 1987-10-17 | Sanshin Ind Co Ltd | 船舶用推進機の警告装置 |
| JPH02256879A (ja) * | 1989-03-30 | 1990-10-17 | Sanshin Ind Co Ltd | 船舶推進機 |
| JP2005145439A (ja) * | 2003-10-22 | 2005-06-09 | Yamaha Motor Co Ltd | 推進力制御装置、それを備えた操船支援システムおよび船舶、ならびに推進力制御方法 |
| JP2008163864A (ja) * | 2006-12-28 | 2008-07-17 | Yamaha Marine Co Ltd | 推進機の制御装置 |
| JP2010143321A (ja) * | 2008-12-17 | 2010-07-01 | Yamaha Motor Co Ltd | 船外機制御装置およびそれを備えた船舶 |
| JP2014080082A (ja) | 2012-10-16 | 2014-05-08 | Yamaha Motor Co Ltd | 船舶用推進システムの運転方法、船舶用推進システムおよびそれを備えた船舶 |
| JP2016068579A (ja) * | 2014-09-26 | 2016-05-09 | 三菱重工業株式会社 | 垂直離着陸機、及び垂直離着陸機の制御方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4067221A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7501308B2 (ja) | 2020-10-28 | 2024-06-18 | スズキ株式会社 | 船舶推進システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220411031A1 (en) | 2022-12-29 |
| EP4067221A4 (fr) | 2024-01-10 |
| EP4067221A1 (fr) | 2022-10-05 |
| JP7348824B2 (ja) | 2023-09-21 |
| JP2021084565A (ja) | 2021-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021106401A1 (fr) | Dispositif de propulsion de navire | |
| JP4331628B2 (ja) | 船舶推進装置の操舵装置および船舶 | |
| US7527538B2 (en) | Toe adjustment for small boat having multiple propulsion units | |
| AU2012368885B2 (en) | Outboard motor control system | |
| JP4994006B2 (ja) | 船舶用操舵装置及び船舶 | |
| WO2013001875A1 (fr) | Dispositif de gouverne de bateau et procédé de gouverne de bateau | |
| JP2014076758A (ja) | 船舶の移動中心推定方法及びシステム | |
| JP5102752B2 (ja) | 船外機制御装置およびそれを備えた船舶 | |
| JP2008126774A (ja) | 船舶用操舵装置及び船舶 | |
| JP2014076755A (ja) | 船舶の制御システム、船舶の制御方法、プログラム | |
| JP6667935B2 (ja) | 船舶 | |
| JP2013014173A (ja) | 船舶操船装置 | |
| JP4884504B2 (ja) | 船舶用操縦装置 | |
| JP5289485B2 (ja) | 多機掛け船舶推進機の制御装置 | |
| US11932370B1 (en) | Systems and methods for steering marine propulsion devices | |
| JP6397844B2 (ja) | 船舶 | |
| WO2017164392A1 (fr) | Navire | |
| US20230286635A1 (en) | Marine vessel maneuvering support apparatus, and marine vessel | |
| JP6598307B2 (ja) | 少なくとも2つの船舶用ドライブを有する船舶の操舵システム及び操舵方法 | |
| US11685498B2 (en) | Ship maneuvering system | |
| JP2023076240A (ja) | 船舶航走システムおよびそれを備える船舶 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20891782 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020891782 Country of ref document: EP Effective date: 20220629 |