WO2020174850A1 - 撮像ユニットおよび放射線画像取得システム - Google Patents
撮像ユニットおよび放射線画像取得システム Download PDFInfo
- Publication number
- WO2020174850A1 WO2020174850A1 PCT/JP2019/050419 JP2019050419W WO2020174850A1 WO 2020174850 A1 WO2020174850 A1 WO 2020174850A1 JP 2019050419 W JP2019050419 W JP 2019050419W WO 2020174850 A1 WO2020174850 A1 WO 2020174850A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mirror
- scintillator
- input surface
- radiation
- scan camera
- Prior art date
Links
- 230000005855 radiation Effects 0.000 title claims abstract description 195
- 238000003384 imaging method Methods 0.000 title claims abstract description 59
- 230000032258 transport Effects 0.000 claims description 126
- 230000001154 acute effect Effects 0.000 claims description 23
- 230000003287 optical effect Effects 0.000 claims description 18
- 238000011144 upstream manufacturing Methods 0.000 claims description 8
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 238000010586 diagram Methods 0.000 description 27
- 238000012545 processing Methods 0.000 description 19
- 238000012546 transfer Methods 0.000 description 17
- 238000000034 method Methods 0.000 description 16
- 230000035945 sensitivity Effects 0.000 description 16
- 230000004048 modification Effects 0.000 description 13
- 238000012986 modification Methods 0.000 description 13
- 238000001514 detection method Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 9
- 239000000126 substance Substances 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 8
- 230000009977 dual effect Effects 0.000 description 6
- 238000007689 inspection Methods 0.000 description 6
- 230000010354 integration Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000001444 catalytic combustion detection Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 229910052684 Cerium Inorganic materials 0.000 description 2
- 241000238631 Hexapoda Species 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 238000002073 fluorescence micrograph Methods 0.000 description 2
- 230000004907 flux Effects 0.000 description 2
- 235000013305 food Nutrition 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 125000000391 vinyl group Chemical group [H]C([*])=C([H])[H] 0.000 description 2
- 229920002554 vinyl polymer Polymers 0.000 description 2
- 229910052688 Gadolinium Inorganic materials 0.000 description 1
- 229910052771 Terbium Inorganic materials 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 229910019990 cerium-doped yttrium aluminum garnet Inorganic materials 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000010794 food waste Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 101150013335 img1 gene Proteins 0.000 description 1
- 101150071665 img2 gene Proteins 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 238000002601 radiography Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images




















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/30—Transforming light or analogous information into electric information
- H04N5/32—Transforming X-rays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/04—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/06—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and measuring the absorption
- G01N23/18—Investigating the presence of flaws defects or foreign matter
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/20—Measuring radiation intensity with scintillation detectors
- G01T1/2002—Optical details, e.g. reflecting or diffusing layers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/20—Measuring radiation intensity with scintillation detectors
- G01T1/2018—Scintillation-photodiode combinations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/16—Measuring radiation intensity
- G01T1/20—Measuring radiation intensity with scintillation detectors
- G01T1/2018—Scintillation-photodiode combinations
- G01T1/20188—Auxiliary details, e.g. casings or cooling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T1/00—Measuring X-radiation, gamma radiation, corpuscular radiation, or cosmic radiation
- G01T1/29—Measurement performed on radiation beams, e.g. position or section of the beam; Measurement of spatial distribution of radiation
- G01T1/2914—Measurement of spatial distribution of radiation
- G01T1/2964—Scanners
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01T—MEASUREMENT OF NUCLEAR OR X-RADIATION
- G01T7/00—Details of radiation-measuring instruments
- G01T7/08—Means for conveying samples received
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/30—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from X-rays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/30—Accessories, mechanical or electrical features
- G01N2223/33—Accessories, mechanical or electrical features scanning, i.e. relative motion for measurement of successive object-parts
- G01N2223/3307—Accessories, mechanical or electrical features scanning, i.e. relative motion for measurement of successive object-parts source and detector fixed; object moves
Definitions
- the present disclosure relates to an imaging unit and a radiation image acquisition system.
- Some devices or systems are known that irradiate an object with X-rays, convert the X-rays that have passed through the object into scintillation light with a scintillator, and detect the scintillation light with a detector.
- the system described in Patent Document 1 includes an opaque scintillator, and images the scintillation light output from the input surface (surface that inputs X-rays) of the scintillator.
- One form of this system includes a transport device that transports an object in the transport direction, and an image is captured using a line scan camera in accordance with the transportation speed of the object.
- the apparatus described in Patent Document 2 outputs from the first image pickup means for picking up the scintillation light output from the input surface (front surface) of the scintillator and the surface (back surface) opposite to the input surface of the scintillator.
- Second imaging means for imaging the scintillation light.
- One of the first and second image pickup means collects the scintillation light output in the normal direction of the front surface or the back surface, and the other of the first and second image pickup means with respect to the normal direction of the front surface or the back surface.
- the scintillation light output in the inclined direction is collected.
- US Pat. No. 6,037,049 describes a system for dental radiography. This system also obtains a radiation image by collecting light from a scintillation plate (or scintillation screen) by a lens and detecting it by a CCD.
- Patent Document 1 In the system described in Patent Document 1, by observing the input surface using an opaque scintillator, it is possible to identify the shape of an object made of a light element such as plastic. With the form using the carrier device and the line scan camera, the radiation image can be acquired at a higher speed. However, when the transport device is used, the enlargement ratio changes in different parts of the object, so that the image acquired by the line scan camera may be blurred.
- Patent Documents 2 and 3 describe that a mirror that reflects scintillation light may be installed in order to image the scintillation light output from the input surface of the scintillator. These mirrors are installed so as to face the input surface, but the mirrors may affect X-rays transmitted through the object. For example, the effect may be that X-rays are absorbed by the mirror. This effect may make it difficult to obtain a radiographic image with high sensitivity.
- the present disclosure can prevent a radiation image from being blurred even with respect to a conveyed object, and can eliminate the influence of a mirror on radiation even when detecting scintillation light output from an input surface of a scintillator. And the radiation image acquisition system will be described.
- One aspect of the present disclosure is an imaging unit that acquires a radiographic image of an object that is transported in a transport direction on a predetermined transport path, and has a wall portion that is arranged so as to face the transport path.
- One or more mirrors that reflect the scintillation light and a line scan camera that is installed in the housing and that detects the scintillation light reflected by the mirror, and is orthogonal to the scan direction corresponding to the transport direction and the scan direction.
- a line scan camera having a line direction, wherein the scintillator is arranged so that the input surface is parallel to the transport direction and parallel to the line direction, and the mirror defines the periphery of the slit and the input surface of the scintillator. It is located outside the irradiation area to be connected.
- the radiation that has passed through the object transported on the transport path passes through the slit formed in the wall of the housing.
- a scintillator, one or more mirrors, and a line scan camera are installed in the housing, and the devices necessary for imaging are unitized.
- the radiation that has entered the housing is input to the input surface of the scintillator, and scintillation light is output from the input surface.
- the line scan camera can acquire a radiation image with low energy and excellent radiation sensitivity. This is advantageous for the detection of substances consisting of light elements, for example.
- the input surface of the scintillator is parallel to the transport direction and parallel to the line direction of the line scan camera, the enlargement ratio is different in different parts of the object (for example, the upstream end and the downstream end in the transport direction). It does not change. Therefore, the radiographic image is prevented from being blurred. Furthermore, since the mirror is located outside the radiation irradiation area, the radiation that has passed through the object is input to the input surface of the scintillator without passing through the mirror. This eliminates the effect of the mirror on the radiation. As a result, this imaging unit makes it possible to obtain a radiographic image of the object clearly and with high sensitivity.
- the mirror comprises a first mirror disposed at a position overlapping a normal of the input surface, the first mirror forming an acute angle between the reflective surface of the first mirror and the input surface.
- the line scan camera detects the scintillation light output in the direction normal to the input surface.
- an image has a perspective due to the difference in magnification of the lens. In that case, the image may be blurred.
- the first mirror reflects the scintillation light output in the normal direction of the input surface, and the scintillation light is detected by the line scan camera. Therefore, the line scan camera can acquire an image without tilt (perspective). The radiographic image is prevented from being blurred.
- the slit is located between the scintillator and the first mirror and the line scan camera in the transport direction.
- the acute angle is within the range of 40 degrees and 50 degrees. According to this configuration, the scintillation light output in the normal direction of the input surface is reflected by the first mirror and detected by the line scan camera with an inclination angle within 10 degrees with respect to the transport direction. Therefore, it is possible to lengthen the casing in the carrying direction and install the line scan camera in the casing.
- the entire imaging unit has a slim shape along the transport path, and the imaging unit can be made compact.
- the slit is located upstream or downstream of the scintillator in the transport direction. According to this configuration, it is easy to form the irradiation area while disposing the mirror at a desired position so that the mirror does not interfere with the irradiation area of the radiation.
- the optical axis of the line scan camera is parallel to the transport direction.
- the input surface of the scintillator is parallel to the transport direction, as described above. According to this configuration, complicated adjustments regarding angles are unnecessary. For example, it becomes easy to adjust the optical axis of the line scan camera and adjust the distance between the mirror and the lens according to the viewing angle associated with the lens focal length of the line scan camera.
- a second line scan camera installed in the housing and detecting scintillation light output from the surface opposite to the input surface is further provided.
- the line scan camera acquires a low-energy radiation image excellent in radiation sensitivity, while the second line-scan camera simultaneously acquires a high-energy radiation image.
- a dual energy type imaging unit is realized.
- Such a scintillator double-sided observation method can obtain a larger energy difference than the conventional dual energy unit, and improves the foreign matter detection performance.
- This imaging unit is excellent in, for example, the ability to discriminate substances composed of light elements.
- a radiation source that outputs radiation toward a target object, a transport device that transports the target object in a transport direction, and a transport device such that the irradiation region includes a transport path of the transport device
- a radiographic image acquisition system may be provided that includes any one of the above-described image pickup units attached thereto.
- the provision of any one of the above-described imaging units prevents the radiographic image from being blurred and eliminates the influence of the mirror on the radiation. Therefore, this radiographic image acquisition system enables a radiographic image of an object to be acquired clearly and with high sensitivity.
- Yet another aspect of the present disclosure is a radiation image acquisition system that acquires a radiation image of an object, wherein the radiation source outputs radiation toward the object, and a carrying device that carries the object in a carrying direction.
- a scintillator having an input surface for inputting radiation transmitted through an object transported by a transport device, one or more mirrors for reflecting the scintillation light output from the input surface, and scintillation light reflected by the mirror.
- a line scan camera having a scan direction corresponding to the transport direction and a line direction orthogonal to the scan direction.
- the scintillator has an input surface parallel to the transport direction and parallel to the line direction.
- the mirror is located outside the illumination area connecting the focal point of the radiation source and the input surface of the scintillator.
- the radiation source irradiates the object conveyed by the conveyance device.
- the radiation transmitted through the object is input to the input surface of the scintillator.
- scintillation light is output from the input surface.
- relatively low energy radiation is converted. Therefore, the line scan camera can acquire a radiation image with low energy and excellent radiation sensitivity. This is advantageous for the detection of substances consisting of light elements, for example. Since the input surface of the scintillator is parallel to the transport direction and parallel to the line direction of the line scan camera, the enlargement ratio is different in different parts of the object (for example, the upstream end and the downstream end in the transport direction). It does not change.
- this radiographic image acquisition system enables a radiographic image of an object to be acquired clearly and with high sensitivity.
- the mirror comprises a first mirror disposed at a position overlapping a normal of the input surface, the first mirror forming an acute angle between the reflective surface of the first mirror and the input surface.
- the line scan camera detects the scintillation light output in the direction normal to the input surface.
- an image has a perspective due to the difference in magnification of the lens. In that case, the image may be blurred.
- the first mirror reflects the scintillation light output in the normal direction of the input surface, and the scintillation light is detected by the line scan camera. Therefore, the line scan camera can acquire an image without tilt (perspective). The radiographic image is prevented from being blurred.
- the radiation source is positioned such that the focus is located between a first virtual plane that includes the reflective surface of the first mirror and a second virtual plane that includes the input surface.
- the acute angle is within the range of 40 degrees and 50 degrees. According to this configuration, the scintillation light output in the normal direction of the input surface is reflected by the first mirror and detected by the line scan camera with an inclination angle within 10 degrees with respect to the transport direction. Therefore, it is easy to install the line scan camera along the transport device.
- the entire imaging unit has a slim shape along the transport device, and the imaging unit can be made compact.
- the irradiation area is formed upstream or downstream of the scintillator in the transport direction. According to this configuration, it is easy to form the irradiation area while disposing the mirror at a desired position so that the mirror does not interfere with the irradiation area of the radiation.
- the optical axis of the line scan camera is parallel to the transport direction.
- the input surface of the scintillator is parallel to the transport direction. According to this configuration, it is not necessary to make complicated adjustments regarding angles for each element. For example, it becomes easy to adjust the optical axis of the line scan camera and adjust the distance between the mirror and the lens according to the viewing angle associated with the lens focal length of the line scan camera.
- a second line scan camera that detects scintillation light output from the surface opposite to the input surface is further provided.
- the line scan camera acquires a low-energy radiation image excellent in radiation sensitivity, while the second line-scan camera simultaneously acquires a high-energy radiation image.
- a dual energy type imaging unit is realized.
- Such a scintillator double-sided observation method can obtain a larger energy difference than the conventional dual energy unit, and improves the foreign matter detection performance.
- This radiation image acquisition system is excellent in, for example, the ability to discriminate substances composed of light elements.
- radiographic images are prevented from blurring and the effect of mirrors on radiation is eliminated. As a result, a radiographic image of the object is obtained clearly and with high sensitivity.
- FIG. 1 is a diagram showing a schematic configuration of a radiation image acquisition system according to the first embodiment of the present disclosure.
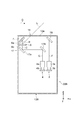
- FIG. 2 is a sectional view showing the internal structure of the image pickup unit in FIG.
- FIG. 3 is a diagram showing a positional relationship among a radiation source, an irradiation region, a scintillator, a first mirror, and a line scan camera in the radiation image acquisition system of FIG.
- FIG. 4 is a diagram showing the positional relationship between the slits formed in the housing and the scintillator and the first mirror.
- FIG. 5A is a diagram showing an irradiation region when the radiation source is installed obliquely, and FIG.
- FIG. 5B is a diagram showing an irradiation region when a radiation source having a wide irradiation angle is installed.
- 6A is a diagram showing the arrangement of scintillators in the first embodiment
- FIG. 6B is a diagram showing the arrangement of scintillators in the reference embodiment
- FIG. 6C is a radiographic image obtained in FIG. 6A.
- FIG. 6(d) is a diagram showing a radiation image obtained in FIG. 6(b).
- FIG. 7(a) is a diagram showing a mode in which a line scan camera is installed in a direction normal to the input surface
- FIG. 7(b) is a diagram showing a mode in which a line scan camera is installed in an oblique direction on the input surface.
- FIG. 7C is a diagram showing a radiation image obtained in FIG. 7A
- FIG. 7D is a diagram showing a radiation image obtained in FIG. 7B
- FIG. 8A is a diagram showing the arrangement of radiation sources in the reference embodiment
- FIG. 8B is a diagram showing interference between the irradiation region and the first mirror in FIG. 8A
- FIG. 8C is the first embodiment. It is a figure which shows the position of the irradiation area
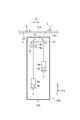
- FIG. 9 is a diagram showing a schematic configuration of the radiation image acquisition system according to the second embodiment of the present disclosure.
- FIG. 10 is a diagram showing an image pickup unit according to a first modification of the second embodiment.
- FIG. 10 is a diagram showing an image pickup unit according to a first modification of the second embodiment.
- FIG. 11 is a diagram showing an image pickup unit according to a second modification of the second embodiment.
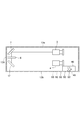
- FIG. 12 is a diagram showing an image pickup unit according to a third modification of the second embodiment.
- FIG. 13 is a figure which shows the radiographic image acquisition system which concerns on the 1st modification of 1st Embodiment.
- FIG. 14 is a diagram showing a modified example of the imaging unit in the radiation image acquisition system of FIG.
- FIG. 15 is a diagram showing a first modification of the line scan camera. 16(a) and 16(b) are diagrams showing a second modification of the line scan camera, respectively.
- FIG. 17 is a diagram showing a modification of the sensor of the line scan camera.
- FIG. 18 is a diagram showing an example of a moving mechanism of the first mirror.
- 19(a) and 19(b) are diagrams showing an example of a replaceable first mirror unit, respectively.
- 20A and 20B are diagrams showing an example of a moving mechanism of the scintillator.
- FIG. 21 is a diagram showing a modified example of the scintillator.
- 22A and 22B are views showing an example of a slit position changing mechanism.
- FIG. 23 is a diagram showing an example of the position adjusting mechanism of the line scan camera.
- the radiation image acquisition system 1 of the first embodiment is a device for acquiring a radiation image of the object A.
- the object A contains, for example, a substance made of a light element.
- the radiation image acquisition system 1 is applied to fields such as food inspection and battery inspection. In the field of food inspection, for example, the presence or absence of foreign matter is inspected.
- the radiation image acquisition system 1 has a unique configuration to be described later, and thus is particularly excellent in the discrimination performance of a substance composed of a light element. Examples of such substances include food waste, hair, vinyl, insects, bones in meat, and the like.
- the radiation image acquisition system 1 is applied to, for example, in-line X-ray inspection.
- the radiation image acquisition system 1 is transported by a radiation source 2 that outputs radiation such as white X-rays toward the target A, a transport device 20 that transports the target A in a predetermined transport direction D, and a transport device 20.
- Scintillator 6 that generates scintillation light in response to the input of radiation that has passed through the target object A
- a line scan camera 3 that detects scintillation light output from the radiation input surface 6a of the scintillator 6, and a radiation image acquisition system 1 A computer 10 for controlling some of the functions of the computer and creating a radiographic image.
- the radiation image acquisition system 1 is a scintillator surface observation type X-ray imaging system.
- the radiation image acquisition system 1 is excellent in low energy X-ray sensitivity.
- Radiation source 2 outputs cone-beam X-rays from the X-ray emitting unit.
- the radiation source 2 has a cone beam X-ray focal point 2a.
- the radiation source 2 may be, for example, a microfocus X-ray source or a millifocus X-ray source.
- the X-rays emitted from the radiation source 2 form a radiation flux.
- the region where this radiation flux exists is the output region 14 (see FIG. 3) of the radiation source 2.
- the X-rays in the irradiation area 12 which is a part of the X-rays in the output area 14, are input to the input surface 6 a of the scintillator 6. That is, the irradiation region 12 is a region that is included in the output region 14 and is narrower than the output region 14.
- the irradiation area 12 includes a central axis L located at the center thereof.
- the transfer device 20 has, for example, a belt conveyor 21 that moves in a circular path, and an object A is placed or held on the transfer surface 21 a of the belt conveyor 21.
- the belt conveyor 21 is a transfer stage or a transfer unit.
- the transfer device 20 includes a drive source (not shown) that drives the belt conveyor 21.
- the transport device 20 is configured to transport the object A in the transport direction D at a constant speed. In other words, the target A is transported by the transport device 20 on the predetermined transport path P.
- the transport direction D is the horizontal direction.
- the transport path P is linear, and the direction in which the transport path P extends is parallel to the transport direction D.
- the transfer timing and the transfer speed of the object A in the transfer device 20 are set in advance and controlled by the control unit 10a of the computer 10.
- the radiation image acquisition system 1 is compatible with all types of transport devices 20.
- the transport direction D and the transport path P may be horizontal, but may be inclined with respect to the horizontal.
- the transport path P does not have to be linear, and may be curved, for example.
- the transport direction D may be a tangent line in a portion of the transport path P that overlaps the irradiation region 12.
- the transfer device 20 does not have to have the physical transfer surface 21a.
- the carrier device 20 may carry the object A in a state where the object A is floated by air.
- the transport device 20 may transport the target A by discharging the target A into the air.
- the transport path P may have a parabolic shape, for example.
- the transfer device 20 is not limited to the form having the belt conveyor 21.
- the transport device 20 may include, for example, a roller conveyor including a plurality of rollers. Since the roller conveyor does not have a belt, the influence of the belt can be eliminated. The fact that a gap (slit-shaped opening) is formed between the rollers is also advantageous as compared with the belt conveyor. By using a roller conveyor, X-ray attenuation due to the belt is reduced. Considering the arrangement of the radiation source 2 and the arrangement of the irradiation region 12 (oblique irradiation) described later, the roller conveyor can be effectively used.
- the roller conveyor is a conveyance means suitable for the radiation image acquisition system 1 in which low energy X-ray sensitivity is important.
- a configuration may be adopted in which two or more belt conveyors are installed in the transport direction and X-rays are emitted from the gap between the belt conveyors.
- the influence of the belt can be eliminated while using the belt conveyor, as in the case of the roller conveyor.
- the radiation image acquisition system 1 includes an imaging unit 30 installed along the transport device 20.
- the imaging unit 30 is attached to the carrier device 20 and is fixed to the carrier device 20, for example.
- the image pickup unit 30 is attached so as not to interfere with the circulation of the belt conveyor 21.
- the image pickup unit 30 is arranged with some gap from the transport unit so as not to interfere with the movement of the transport unit such as a belt conveyor or a roller conveyor.
- the image pickup unit 30 has a rectangular parallelepiped housing 13.
- the housing 13 is made of, for example, a material that can shield X-rays.
- the housing 13 is a so-called dark box.
- the housing 13 may be made of aluminum or iron, for example.
- the housing 13 may include a protective material, and lead may be used as the protective material.
- the housing 13 has a shape elongated in the transport direction D.
- the housing 13 includes an upper wall portion 13a and a bottom wall portion 13b facing each other in the vertical direction, a first side wall portion 13c and a second side wall portion 13d facing each other in the transport direction D, and a horizontal detection width orthogonal to the transport direction D.
- the third side wall portion 13e and the fourth side wall portion 13f (see FIG.
- the imaging unit 30 has a first side wall portion 13c and a second side wall portion 13d of the housing 13 that are extremely small, and is a compact device along the transport device 20.
- the transport direction D is parallel to the x direction, which is parallel to the paper surface shown in the drawing.
- the detection width direction is parallel to the y direction perpendicular to the paper surface shown in the drawing.
- the up-down direction is parallel to the z direction that is parallel to the paper surface shown in the drawing.
- the upper wall portion (wall portion) 13 a is arranged so as to face the transfer path P of the transfer device 20. In other words, the upper wall portion 13a is closest to the transfer device 20 among the six wall portions of the housing 13. The upper wall portion 13a may be attached to the transport device 20.
- the image pickup unit 30 is configured to be able to pick up the scintillation light output from the input surface 6a of the scintillator 6 in the direction of the normal line B of the input surface 6a. Therefore, the imaging unit 30 includes the first mirror 7 that reflects the scintillation light output in the direction of the normal line B of the input surface 6a. That is, the imaging unit 30 includes only one first mirror 7 as a mirror. The first mirror 7 is arranged at a position overlapping the normal line B of the input surface 6a such that its reflection surface 7a faces the input surface 6a obliquely.
- a scintillator 6, a first mirror 7, and a line scan camera 3 are installed in the housing 13.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are fixed inside the housing 13.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are optically coupled.
- the scintillator 6 and the first mirror 7 are arranged near the first side wall portion 13c.
- the line scan camera 3 is arranged near the second side wall portion 13d.
- the scintillator 6 is held by, for example, a scintillator holder 8 and is arranged horizontally, for example.
- the first mirror 7 is held by, for example, a mirror holder 9 and arranged so as to be inclined with respect to the horizontal.
- the scintillator 6 is a plate-shaped wavelength conversion member.
- the scintillator 6 has a rectangular shape that is long in the detection width direction (y direction) (see FIG. 4 ).
- the scintillator 6 includes, for example, Gd 2 O 2 S:Tb, Gd 2 O 2 S:Pr, CsI:Tl, CdWO 4 , CaWO 4 , Gd 2 SiO 5 :Ce, Lu 0.4 Gd 1.6 SiO 5 , Bi 4 Ge 3 O.
- the thickness of the scintillator 6 is set to an appropriate value depending on the energy band of radiation to be detected in the range of several ⁇ m to several mm.
- the scintillator 6 converts the X-rays that have passed through the object A into visible light. X-rays of relatively low energy are converted by the input surface 6a of the scintillator 6 and output from the input surface 6a.
- X-rays of relatively high energy are converted by the back surface 6b of the scintillator 6 and output from the back surface 6b.
- the scintillator holder 8 is opened upward, and the input surface 6a of the scintillator 6 is exposed.
- the back surface 6b may be closed or may be exposed.
- the scintillator 6 may be composed of one scintillator, or may be a combination of two scintillators such as pasted together. When assembling two scintillators, a plate or film having a property of blocking light or reflecting may be sandwiched between the two scintillators.
- the two scintillators may have the same type or different types.
- the first mirror 7 is a mirror made of, for example, aluminum vapor-deposited glass or mirror-finished metal.
- the first mirror 7 has a rectangular shape that is long in the detection width direction (y direction) (see FIG. 4 ).
- the first mirror 7 includes a reflecting surface 7a having an area sufficient to reflect the scintillation light output from the input surface 6a in the direction of the normal line B.
- the first mirror 7 forms, for example, an acute angle between the reflecting surface 7a and the input surface 6a of the scintillator 6.
- the fact that the first mirror 7 forms an angle with the input surface 6 a does not mean that the first mirror 7 is close to the scintillator 6.
- the first mirror 7 may be close to the scintillator 6, but the first mirror 7 may be separated from the scintillator 6.
- the angle is defined by the extension surface of the reflection surface 7a and the extension surface of the input surface 6a.
- the first mirror 7 reflects the scintillation light output in the direction of the normal line B of the input surface 6a.
- the above acute angle is preferably within the range of 40 degrees or more and 50 degrees or less. More preferably, the acute angle is 45 degrees.
- the acute angle may be determined based on the arrangement of the radiation source 2 and the position of the slit 15 described later.
- the arrangement of the line scan camera 3 may be appropriately adjusted depending on the size of the acute angle. Depending on the size of the acute angle, another mirror or mirrors may be further installed.
- the line scan camera 3 captures an image according to the movement of the object A.
- the line scan camera 3 has a lens coupling type having a lens section 3a that collects the scintillation light output from the input surface 6a of the scintillator 6 and a sensor section 3b that detects the scintillation light collected by the lens section 3a. Is the detector of.
- the lens unit 3 a includes one lens, and the focus of this lens is aligned with the input surface 6 a of the scintillator 6.
- the sensor unit 3b includes an image sensor 3c.
- the image sensor 3c is, for example, an area image sensor capable of TDI (time delay integration) driving.
- the image sensor 3c is, for example, a CCD area image sensor.
- the image sensor 3c has a structure in which a plurality of CCDs arranged in a line in the pixel direction are arranged in a plurality of stages in the integration direction corresponding to the moving direction of the object A.
- the line scan camera 3 has a scan direction d1 corresponding to the conveyance direction D of the object A and a line direction d2 orthogonal to the scan direction d1.
- This scanning direction d1 is the above integration direction and is parallel to the z direction in the figure.
- the line direction d2 is the pixel direction described above, and is parallel to the y direction in the drawing.
- the scanning direction d1 is a direction converted from the transport direction D via the first mirror 7. In the present embodiment, the scanning direction is converted from the conveyance direction D by 90 degrees.
- the image sensor 3c is controlled by the control unit 10a so as to transfer charges in accordance with the movement of the object A. That is, the image sensor 3c performs charge transfer on the light receiving surface 3d in synchronization with the movement of the object A by the transport device 20. As a result, a radiation image with a good S/N ratio can be obtained.
- the control unit 10a of the computer 10 controls the radiation source 2 and the line scan camera 3 to turn on the radiation source 2 in synchronization with the imaging timing of the line scan camera 3.
- the configuration may be made.
- An encoder may be provided on the stage and the line scan camera 3 may be controlled by a signal from the encoder.
- the optical axis F (see FIG. 3) of the lens portion 3a of the line scan camera 3 is, for example, the transport direction D. Parallel to.
- the line scan camera 3 detects scintillation light output in the direction of the normal line B of the input surface 6a.
- the scintillator 6 is arranged so that the input surface 6a is parallel to the transport direction D and also parallel to the line direction d2. That is, the input surface 6a of the scintillator 6 is parallel to the xy plane.
- the upper wall portion 13a of the housing 13 is provided with a slit 15 for passing X-rays output from the radiation source 2.
- the slit 15 has a rectangular shape that is long in the detection width direction (y direction).
- the slit 15 includes a rectangular peripheral edge 15a.
- the input surface 6 a of the scintillator 6 inputs the X-ray in the irradiation region 12 that has passed through the slit 15.
- the slit 15 and the irradiation region 12 will be described in more detail. As shown in FIG. 3, among the X-rays of the output region 14 output from the radiation source 2, only the irradiation region 12 passes through the slit 15. There is. The X-rays in the remaining area do not enter the housing 13. That is, the slit 15 defines the irradiation area 12. The central axis L of the irradiation region 12 passes through the center of the slit 15.
- the irradiation region 12 is defined as a region (quadrangular pyramid-shaped region) that linearly connects the peripheral edge 15a of the slit 15 and the input surface 6a of the scintillator 6.
- the irradiation region 12 is defined as a region that linearly connects the focal point 2a of the radiation source 2 and the input surface 6a of the scintillator 6.
- the “input surface 6a of the scintillator 6” means only a region which effectively works for the output of scintillation light. For example, of the entire rectangular input surface 6a, the area covered by the scintillator holder 8 and the like are not included in the “input surface 6a of the scintillator 6” when defining the irradiation area 12.
- the slit 15 is located between the scintillator 6 and the first mirror 7 and the line scan camera 3 in the transport direction D.
- the radiation source 2 is arranged such that the focal point 2a is located between the first virtual plane P1 including the reflecting surface 7a of the first mirror 7 and the second virtual plane P2 including the input surface 6a of the scintillator 6 ( (See FIG. 2).
- the slit 15 is located downstream of the scintillator 6 in the transport direction D.
- the first mirror 7 is positioned outside the X-ray irradiation region 12. In other words, the first mirror 7 is installed in a position and orientation (including inclination) so as not to interfere with the irradiation area 12.
- the first mirror 7 is arranged so as to be inclined with respect to the normal line B of the input surface 6a so that the reflection surface 7a is along the boundary surface of the irradiation region 12.
- the scintillation light condensed by the lens unit 3a of the line scan camera 3 traverses the irradiation region 12 in the z direction (the normal line B direction of the input surface 6a), and then traverses the irradiation region 12 in the x direction (transport direction D). To do.
- the radiation source 2 may be installed in various modes.
- the radiation source 2 having a narrow irradiation angle, that is, the output region 14 may be installed obliquely.
- the output area 14 may be equivalent to the irradiation area 12.
- the radiation source 2 having a wide irradiation angle, that is, a wide output region 14 may be installed in the vertical direction.
- the central axis of the output region 14 is oriented in the vertical direction (z direction), but the central axis L of the irradiation region 12 intersects the input surface 6 a of the scintillator 6.
- the radiation source 2 is arranged so as to be located on the first virtual plane P1 including the reflecting surface 7a of the first mirror 7 or above the first virtual plane P1 (opposite to the second virtual plane P2). May be.
- the computer 10 has, for example, a CPU (Central Processing Unit), a ROM (Read Only Memory), a RAM (Random Access Memory), and an input/output interface.
- the computer 10 performs image processing for creating a radiation image of the object A based on the radiation image data output from the control unit 10a (control processor) that controls the radiation source 2 and the line scan camera 3 and the line scan camera 3.
- a unit 10b image processing processor.
- the image processing unit 10b inputs radiation image data and executes a predetermined process such as image processing on the input radiation image data.
- a display device 11 is connected to the computer 10.
- the image processing unit 10b outputs the created radiation image to the display device 11.
- the control unit 10a controls the radiation source 2 based on the values of the tube voltage and the tube current of the radiation source 2 stored by the user's input or the like.
- the control unit 10a controls the line scan camera 3 based on the exposure time of the line scan camera 3 stored by the user's input or the like.
- the control unit 10a and the image processing unit 10b may be separate processors or the same processor.
- the computer 10 may be programmed to execute the function of the control unit 10a and the function of the image processing unit 10b.
- the computer 10 may be configured by a microcomputer or FPGA (Field-Programmable Gate Array).
- the operation of the radiation image acquisition system 1, that is, the method of acquiring a radiation image will be described.
- the target A is transported in the transport direction D using the transport device 20 (transport process).
- the radiation source 2 outputs radiation such as white X-rays toward the object A (radiation output step).
- the radiation transmitted through the object A is input to the input surface 6a (input step).
- the scintillator 6 converts radiation into scintillation light (conversion step).
- the scintillation light output from the input surface 6a is reflected by the first mirror 7 (reflection step).
- the lens portion 3a of the line scan camera 3 forms an image of the scintillation light on the image sensor 3c (image forming step).
- the image sensor 3c captures the scintillation light (scintillation image) formed by the lens unit 3a (imaging step).
- charge transfer (TDI operation) is performed in synchronization with the movement of the object A.
- the line scan camera 3 outputs the radiation image data obtained by imaging to the image processing unit 10b of the computer 10.
- the image processing unit 10b of the computer 10 inputs radiation image data, executes predetermined processing such as image processing on the input radiation image data, and creates a radiation image (image creating process).
- the image processing unit 10b outputs the created radiation image to the display device 11.
- the display device 11 displays the radiation image output from the image processing unit 10b.
- a radiation image is obtained by observing the surface of the object A through the above steps.
- the radiation source 2 irradiates the object A conveyed by the conveyance device 20 with radiation.
- the radiation that has passed through the object A passes through the slit 15 formed in the upper wall portion 13 a of the housing 13.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are installed in the housing 13, and the devices necessary for imaging are unitized.
- the radiation that has entered the housing 13 is input to the input surface 6 a of the scintillator 6.
- scintillation light is output from the input surface 6a.
- the line scan camera 3 can acquire a radiation image with low energy and excellent radiation sensitivity.
- the input surface 6a of the scintillator 6 is parallel to the transport direction D and also parallel to the line direction d2 of the line scan camera 3, different portions of the object A (for example, the upstream end and the downstream end in the transport direction D). , Etc., the enlargement ratio does not change.
- the radiation image IMG2 is blurred during TDI integration due to the difference in magnification of the X-ray projection image. (See FIG. 6D).
- FIG. 6B when the input surface 6a has an angle with respect to the transport direction D, the radiation image IMG2 is blurred during TDI integration due to the difference in magnification of the X-ray projection image.
- the radiation image acquisition system 1 and the imaging unit 30 make it possible to acquire a radiation image of an object clearly and with high sensitivity. Moreover, according to the radiation image acquisition system 1, a radiation image can be acquired at a higher speed. Furthermore, it is possible to acquire a radiation image with a good S/N ratio.
- the radiation source 2 has a limitation in the output of the tube voltage and the tube current, and has a characteristic that it is difficult to obtain an output due to the limitation of the tube current when the tube voltage is low.
- the scintillator surface observation method it becomes difficult to be restricted by the tube current, and it is possible to perform X-ray imaging at an efficient location of the radiation source 2. As a result, improvement in tact time can be expected.
- the line scan camera 3 detects the scintillation light output in the direction of the normal line B of the input surface 6a.
- FIG. 7B when scintillation light output in a direction inclined with respect to the normal line B direction of the input surface 6a is detected, the TDI integration is caused due to the difference in the magnification of the lens.
- a radiation image IMG4 is subject to a perspective (perspective) (see FIG. 7D). In that case, the radiation image IMG4 is blurred.
- FIG. 7A when the line scan camera 3 detects the scintillation light output in the direction of the normal B of the input surface 6a, the radiation image IMG3 does not have a perspective. (See FIG. 7(c)).
- the line scan camera 3 can acquire an image without tilt (perspective). The radiographic image is prevented from being blurred.
- the slit 15 is located between the scintillator 6 and the first mirror 7 and the line scan camera 3 in the transport direction D.
- the radiation source 2 is arranged such that the focal point 2a is located between the first virtual plane P1 including the reflection surface 7a of the first mirror 7 and the second virtual plane P2 including the input surface 6a of the scintillator 6. It is located in. According to these configurations, radiation can be successfully introduced within the range of the acute angle between the scintillator 6 and the first mirror 7. That is, the irradiation region 12 can be successfully formed within the range of the acute angle between the scintillator 6 and the first mirror 7. On the other hand, it is easy to secure the optical path length required for the line scan camera 3.
- the input surface 6a of the scintillator 6 and the transport direction D be parallel, and the line scan camera 3 outputs the scintillation light output in the direction B of the normal to the input surface 6a. It is required to detect. Moreover, it is desired to reduce the distance between the object A and the input surface 6a as much as possible. As a result, the first mirror 7 is adopted. However, as shown in FIG. 8B, when the first mirror 7 is installed, the first mirror 7 covers the X-ray irradiation region 12. As a result, the soft X-ray component contained in the X-ray is attenuated. As a result, the low energy radiation sensitivity is impaired. As a solution to this, as shown in FIG.
- the position and angle of the irradiation region 12 are adjusted so that the X-ray irradiation region 12 does not cover the first mirror 7.
- the position of the radiation source 2 and the position of the slit 15 are adjusted so that the central axis L of the irradiation region 12 is 45 degrees with respect to the input surface 6a.
- the acute angle between the scintillator 6 and the first mirror 7 is within the range of 40 degrees or more and 50 degrees or less. According to this configuration, the scintillation light output in the direction of the normal line B of the input surface 6a is reflected by the first mirror 7 and detected by the line scan camera 3 with an inclination angle within 10 degrees with respect to the transport direction D. It Therefore, it is easy to install the line scan camera 3 along the transport device 20.
- the entire imaging unit 30 has a slim shape along the transport device 20, and the imaging unit 30 can be made compact. When the acute angle is 45 degrees, this effect is more suitably exhibited.
- the irradiation area 12 is formed downstream of the scintillator 6 in the transport direction D. According to this configuration, it is easy to form the irradiation region 12 so that the first mirror 7 does not interfere with the irradiation region 12 of the radiation while the first mirror 7 is arranged at a desired position.
- the optical axis F of the line scan camera 3 is parallel to the transport direction D.
- the input surface 6a of the scintillator 6 is parallel to the transport direction D. According to this configuration, it is not necessary to make complicated adjustments regarding angles for each element. For example, it becomes easy to adjust the optical axis F of the line scan camera 3 and adjust the distance between the first mirror 7 and the lens according to the viewing angle associated with the focal length of the lens of the line scan camera 3.
- the radiation image acquisition system 1A is different from the radiation image acquisition system 1 of the first embodiment in that the imaging unit 30A is installed in the housing 13A and the scintillation light output from the back surface 6b opposite to the input surface 6a.
- a second line scan camera 4 for detecting is further provided.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are optically coupled.
- the scintillator 6, the third mirror 17, and the second line scan camera 4 are optically coupled.
- the scintillator holder 8 is open upward and downward, and the input surface 6a and the back surface 6b of the scintillator 6 are exposed.
- the second line scan camera 4 has the same configuration as the line scan camera 3. That is, the second line scan camera 4 has the lens unit 4a and the sensor unit 4b including the image sensor 4c.
- the third mirror 17 is held by, for example, a mirror holder 19 and is arranged so as to be inclined with respect to the horizontal.
- the third mirror 17 is arranged at a position overlapping the normal line C of the back surface 6b such that its reflecting surface 17a faces the back surface 6b obliquely.
- the optical axis G of the lens portion 4a of the second line scan camera 4 is parallel to the transport direction D, for example.
- the second line scan camera 4 detects the scintillation light output in the direction of the normal line C of the back surface 6b via the reflecting surface 17a of the third mirror 17.
- the position of the second line scan camera 4 in the transport direction D is set, for example, so that the optical path length in the line scan camera 3 and the optical path length in the second line scan camera 4 are equal.
- the optical path lengths are not necessarily equal.
- the second line scan camera 4 and the line scan camera 3 may be independently controlled as two cameras.
- the second line scan camera 4 and the line scan camera 3 may be configured to be able to control two sensors from one control system by sharing a control board.
- image processing may be performed for alignment.
- image processing including coordinate conversion may be performed for alignment.
- pixel conversion may be performed by coordinate conversion or enlargement/reduction.
- the number of lines may be equalized by interpolation, averaging, or thinning processing. If the line scan camera 3 and the second line scan camera 4 have different enlargement ratios, the enlargement ratios may be adjusted by the enlargement ratio correction process. When the image sensors of the line scan camera 3 and the second line scan camera 4 are different, a correction process may be performed to match the number of pixels.
- the line scan camera 3 acquires a low-energy radiation image excellent in radiation sensitivity, while the second line-scan camera 4 simultaneously acquires a high-energy radiation image.
- a dual energy type imaging unit is realized.
- Such a scintillator double-sided observation method can obtain a larger energy difference than the conventional dual energy unit, and improves the foreign matter detection performance.
- the image pickup unit 30A is excellent in discriminating performance of substances (hair, vinyl, insects, etc.) made of light elements, for example.
- a scintillator double-sided observation type imaging unit 30B including a vertical housing 13B may be provided.
- a first mirror 7 and a second mirror 7B which are two mirrors that reflect the scintillation light output in the direction of the normal B of the input surface 6a, are installed.
- a third mirror 17 and a fourth mirror 17B which are two mirrors that reflect the scintillation light output in the direction of the normal line C of the back surface 6b, are installed.
- the scintillator 6, the first mirror 7, the second mirror 7B, and the line scan camera 3 are optically coupled.
- the scintillator 6, the third mirror 17, the fourth mirror 17B, and the second line scan camera 4 are optically coupled. This form can also be implemented in a two-sensor, one-lens system described later.
- a scintillator double-sided observation type imaging unit 30C including a vertical housing 13C may be provided.
- this imaging unit 30B two mirrors, a first mirror 7 and a second mirror 7C, which reflect the scintillation light output in the direction of the normal B of the input surface 6a, are installed.
- the scintillator 6, the first mirror 7, the second mirror 7C, and the line scan camera 3 are optically coupled.
- the scintillator 6 and the second line scan camera 4 are optically coupled.
- Both the first mirror 7 and the second mirror 7C are located outside the irradiation area 12.
- the tilt angle ⁇ 1 of the X-ray central axis L is, for example, 45 degrees.
- the second line scan camera 4 is arranged at a position overlapping the normal line C.
- the distance from the upper wall portion 13a of the housing 13 is short.
- a scintillator double-sided observation type imaging unit 30D including a horizontal housing 13D may be provided.
- the line scan camera 3 and the second line scan camera 4 are installed diagonally below the housing 13D.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are optically coupled.
- the scintillator 6, the third mirror 17, and the second line scan camera 4 are optically coupled.
- the inclination angle of the first mirror 7 is, for example, 30 to 40 degrees.
- the inclination angle of the third mirror 17 is, for example, 50° to 60°.
- the tilt angle ⁇ 1 of the X-ray central axis L is, for example, 45 degrees.
- the tilt angle of the first mirror 7 is set to a minimum angle that prevents X-rays from being vignetted, and is smaller than 45 degrees.
- a radiation image acquisition system 1E in which an imaging unit 30 is attached to a carrier device 20 installed obliquely may be provided.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are optically coupled.
- the radiation source 2 may be installed horizontally and the transport device 20 may be installed obliquely.
- the object A freely falls on the transport surface 21a, which is a gliding surface.
- the imaging unit 30 can also be installed diagonally. In this way, the image pickup unit 30 can be easily incorporated into an existing inspection device because the image pickup unit 30 can be installed at any angle or orientation.
- the versatility of the image pickup unit 30 is improved.
- the slit 15 is located upstream of the scintillator 6 in the transport direction D, for example.
- the double-sided observation method may be applied to the oblique transportation type radiation image acquisition system 1E shown in FIG.
- a housing 13F in which only the scintillator 6 and the first mirror 7 have an oblique shape may be provided.
- this imaging unit 30F two mirrors, a first mirror 7 and a second mirror 7F, are installed inside a housing 13F.
- the scintillator 6, the first mirror 7, the second mirror 7F, and the line scan camera 3 are optically coupled.
- the scintillation light can be taken out horizontally by the first mirror 7 and the second mirror 7F.
- the line scan camera 3 is arranged horizontally.
- the housing in which the line scan camera 3 is installed is installed horizontally, and X-rays from the radiation source 2 can also be irradiated vertically (vertically).
- the object A is conveyed obliquely, there is an advantage that the oblique section can be shortened. Note that the double-sided observation method may be applied to the oblique transport type and horizontal installation type imaging unit shown in FIG.
- the configuration in which the imaging unit is installed obliquely can be effectively applied to, for example, a carrier device that discharges the object A into the air.
- a camera with a multi-lens multi-sensor may be applied instead of the line scan camera 3 or the second line scan camera 4 of each of the above embodiments. That is, a camera with a multi-lens multi-sensor may be applied. That is, a plurality of low pixel cameras can be used instead of one high resolution camera. By reducing the number of pixels of the sensor, the distance between the scintillator 6 and the camera can be reduced. As a result, the entire housing can be downsized.
- two cameras 25A and 25B may be installed in parallel.
- the two cameras 25A and 25B are arranged in a direction orthogonal to the transport direction D.
- a common main board 26 is connected to each of the camera boards 25a and 25b of the cameras 25A and 25B.
- the scintillator 6, the first mirror 7, and the camera 25A are optically coupled, and the scintillator 6, the first mirror 7, and the camera 25B are optically coupled. According to this mode, high resolution can be obtained and the size of the housing can be suppressed.
- the number of cameras arranged in parallel may be three or more.
- Two high resolution cameras may be arranged in parallel, or one or a plurality of low resolution cameras and one or a plurality of high resolution cameras may be used together.
- the pixel pitch can be halved, and when three cameras are arranged in parallel, the pixel pitch can be 1 ⁇ 3.
- a camera having one lens and two sensors may be applied. That is, two TDI sensors (or line sensors) 28, 28 are arranged in one image circle.
- the scintillator 6, the first mirror 7, the lens 27, and the one sensor 28 are optically coupled, and the scintillator 6, the third mirror 17, the lens 27, and the other sensor 28 are optically coupled.
- only one lens is required, which may be advantageous in terms of cost or size.
- the focal length L1 is fixed, it is necessary to increase the distance L2 in order to widen the detection width.
- the distance L2 between the lens 27 and the mirrors 7 and 17 increases, the scintillator 6 and the mirror The distance L3 between 7 and 17 also becomes long.
- the distance L4 between the sensors 28, 28 has a limit.
- a method of performing stop-and-go imaging using an area sensor instead of the TDI sensor is also conceivable.
- a low energy fluorescence image region 29a and a high energy fluorescence image region 29b may be provided on one sensor 29.
- a low-energy radiation image and a low-energy radiation image can be captured. According to this method, it is possible to image with one sensor for one lens.
- an adjusting mechanism 35 capable of adjusting the positions of the first mirror 7 and the third mirror 17 with respect to the scintillator 6 may be installed.
- the scintillator 6 and the first mirror 7 are optically coupled, and the scintillator 6 and the third mirror 17 are optically coupled.
- the adjusting mechanism 35 is connected to, for example, the mirror holder 9 of the first mirror 7 and the mirror holder 19 of the third mirror 17 to connect the first mirror 7 and the third mirror 17 to the normal line B direction of the input surface 6a and the rear surface 6b. Are moved along the direction of the normal line C. Thereby, the height of the scintillation light can be changed arbitrarily.
- the first mirror 7 and the third mirror 17 may be interlocked to move symmetrically with respect to the scintillator 6, or the first mirror 7 and the third mirror 17 may be moved separately.
- the first mirror 7 and the third mirror 17 may be fixed to a common mirror unit holder 36.
- the scintillator 6 and the first mirror 7 are optically coupled, and the scintillator 6 and the third mirror 17 are optically coupled.
- an adjusting mechanism 38 capable of adjusting the positions of the first mirror 7 and the third mirror 17 with respect to the scintillator 6 is installed by moving the scintillator holder 8 back and forth. May be done.
- the scintillator 6 and the first mirror 7 are optically coupled, and the scintillator 6 and the third mirror 17 are optically coupled.
- the scintillator 6 is held by the scintillator holder 8 in the transport direction D, and the irradiation position of the radiation (the position of the central axis L in the drawing) is changed to the transport direction D.
- the positions of the first mirror 7 and the third mirror 17 with respect to 6 may be adjusted.
- the scintillator 6A and the first mirror 7 are optically coupled, and the scintillator 6A and the third mirror 17 are optically coupled.
- the positional relationship (distance) between the scintillator 6 and the first mirror 7 and the third mirror 17 can be flexibly changed infinitely.
- a mechanism that can change the position of the slit 15 that is the radiation entrance window may be provided.
- the scintillator 6 and the first mirror 7 are optically coupled, and the scintillator 6 and the third mirror 17 are optically coupled.
- a large opening 45 is formed in the upper wall portion 13a of the housing 13A, and an adjustment plate 47 having a slit 15 smaller than the opening 45 may be installed.
- the adjustment plate is a part of the wall portion of the housing 13A.
- the adjustment plate 47 is fixed to the upper wall portion 13a with, for example, four screws 46 located at the four corners.
- the adjustment plate 47 is formed with four elongated holes 47a that are long in the carrying direction D, and the screws 46 are inserted into these elongated holes 47a.
- the position of the adjusting plate 47 in the transport direction D can be changed within the range of the long hole 47a.
- the means for physically changing the distance between the scintillator 6 and the first mirror 7 and the third mirror 17, and the relative position of the scintillator 6 and the first mirror 7 and the third mirror 17 are changed. Therefore, it can be considered as a means for changing the distance.
- a plurality of holding holes 50 are formed in the bottom wall portion 13b of the housing 13A, and the pins 49 are engaged with the holding holes 50, whereby the second line scan camera
- the position of 4 (and the line scan camera 3) in the transport direction D may be adjusted.
- the scintillator 6, the first mirror 7, and the line scan camera 3 are optically coupled.
- the scintillator 6, the third mirror 17, and the second line scan camera 4 are optically coupled.
- the distance between the first mirror 7 and the third mirror 17 and the line scan camera 3 and the second line scan camera 4 changes depending on the focal length of the camera and the length of the scintillator 6.
- the position of the camera can be easily adjusted with respect to the plurality of lenses (focal lengths) and the length of the scintillator 6.
- the line scan camera and the second line scan camera are not limited to the mode including the TDI sensor.
- the line scan camera and the second line scan camera may include one or more line scan sensors. That is, the same process as the time delay integration may be performed using a multi-line sensor having two or more columns, or the signal of each line of the multi-line sensor is read and an image such as a line sensor image is obtained by signal processing. May be created. Images may be created using a single line sensor. Even with a single line sensor, the image may be blurred because it is affected by the enlargement ratio within the pixel. When affected by the enlargement ratio, the fluorescent image may move diagonally within the pixel, resulting in a decrease in resolution, and the image may be blurred. According to the radiation image acquisition system and the imaging unit of the present disclosure, it is possible to prevent the radiation image from being blurred.
- the digital signal addition of the photodiode array may be performed.
- the detector may be diagonal. That is, the input surface 6a does not have to be parallel to the transport direction D.
- the radiation irradiation area 12 is not formed by the slit 15 of the housing 13, but an irradiation area defining unit including a plurality of shielding walls (or shielding plates) is installed between the radiation source 2 and the scintillator 6. May be. In that case, a radiation source 2 having a wide irradiation angle, that is, a wide output region 14 may be used.
- radiographic images are prevented from blurring and the effect of mirrors on radiation is eliminated. As a result, a radiographic image of the object is obtained clearly and with high sensitivity.
Landscapes
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- High Energy & Nuclear Physics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Engineering & Computer Science (AREA)
- Analytical Chemistry (AREA)
- Chemical & Material Sciences (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Measurement Of Radiation (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Abstract
撮像ユニットは、放射線を通過させるためのスリットが壁部に形成された筐体と、スリットを通過した放射線を入力する入力面を有するシンチレータと、入力面から出力されるシンチレーション光を反射する第1ミラーと、第1ミラーで反射されたシンチレーション光を検出するラインスキャンカメラと、を備える。シンチレータは、入力面が搬送方向に平行で且つライン方向に平行であるように配置される。第1ミラーは、スリットの周縁とシンチレータの入力面とを結ぶ照射領域の外部に位置している。
Description
本開示は、撮像ユニットおよび放射線画像取得システムに関する。
対象物にX線を照射し、対象物を透過したX線をシンチレータでシンチレーション光に変換させて、そのシンチレーション光を検出器によって検出するいくつかの装置またはシステムが知られている。たとえば特許文献1に記載されたシステムは、不透明なシンチレータを備え、そのシンチレータの入力面(X線を入力する表面)から出力されるシンチレーション光を撮像する。このシステムの一形態は、対象物を搬送方向に搬送する搬送装置を備え、ラインスキャンカメラを用いて、対象物の搬送速度に合わせて撮像を行う。
一方、特許文献2に記載された装置は、シンチレータの入力面(表面)から出力されるシンチレーション光を撮像する第1の撮像手段と、シンチレータの入力面とは反対側の面(裏面)から出力されるシンチレーション光を撮像する第2の撮像手段とを備える。第1および第2の撮像手段の一方は表面または裏面の法線方向に出力されるシンチレーション光を集光し、第1および第2の撮像手段の他方は表面または裏面の法線方向に対して傾斜した方向に出力されるシンチレーション光を集光する。特許文献3には、歯科用放射線撮像法のためのシステムが記載されている。このシステムも、シンチレーションプレート(またはシンチレーションスクリーン)からの光をレンズが集光してCCDが検出することで、放射線画像を得ている。
特許文献1に記載されたシステムでは、不透明なシンチレータを用いて入力面の観察を行うことで、プラスチック等の軽元素からなる対象物の形状等を識別可能である。搬送装置およびラインスキャンカメラを用いた形態では、より高速に放射線画像を取得可能である。しかしながら、搬送装置を用いた場合には、対象物の中の異なる部分で拡大率が変化するため、ラインスキャンカメラによって取得される画像がぼやけるおそれがある。一方で、特許文献2および3には、シンチレータの入力面から出力されるシンチレーション光を撮像するために、シンチレーション光を反射させるミラーが設置されてもよい点が記載されている。これらのミラーは、入力面に対面するように設置されるが、ミラーが、対象物を透過したX線に影響を及ぼすおそれがある。たとえば、X線がミラーに吸収されるという影響が生じ得る。この影響は、放射線画像を高感度に取得することを困難にする可能性がある。
本開示は、搬送される対象物に対しても放射線画像がぼやけることを防止でき、シンチレータの入力面から出力されるシンチレーション光を検出する場合でも放射線に対するミラーの影響を排除することができる撮像ユニットおよび放射線画像取得システムを説明する。
本開示の一態様は、所定の搬送経路上で搬送方向に搬送される対象物の放射線画像を取得するための撮像ユニットであって、搬送経路に対面するように配置される壁部を有し、放射線を通過させるためのスリットが壁部に形成された筐体と、筐体内に設置され、スリットを通過した放射線を入力する入力面を有するシンチレータと、筐体内に設置され、入力面から出力されるシンチレーション光を反射する1つまたは複数のミラーと、筐体内に設置され、ミラーで反射されたシンチレーション光を検出するラインスキャンカメラであって、搬送方向に対応するスキャン方向とスキャン方向に直交するライン方向とを有するラインスキャンカメラと、を備え、シンチレータは、入力面が搬送方向に平行で且つライン方向に平行であるように配置され、ミラーは、スリットの周縁とシンチレータの入力面とを結ぶ照射領域の外部に位置している。
この撮像ユニットでは、搬送経路上で搬送される対象物を透過した放射線が、筐体の壁部に形成されたスリットを通過する。筐体内には、シンチレータと、1つまたは複数のミラーと、ラインスキャンカメラとが設置されており、撮像に必要な機器がユニット化されている。筐体内に入射した放射線は、シンチレータの入力面に入力され、その入力面からシンチレーション光が出力される。シンチレータの入力面に近い領域では、比較的低いエネルギーの放射線が変換される。よって、ラインスキャンカメラは、低エネルギーの放射線感度に優れた放射線画像を取得できる。このことは、たとえば軽元素からなる物質の検出に有利にはたらく。シンチレータの入力面が、搬送方向に平行であり、且つラインスキャンカメラのライン方向に平行であるので、対象物の中の異なる部分(たとえば搬送方向における上流端と下流端など)において、拡大率は変化しない。よって、放射線画像がぼやけることが防止される。さらにはミラーが放射線の照射領域の外部に位置しているので、対象物を透過した放射線は、ミラーを通ることなくシンチレータの入力面に入力される。これにより、放射線に対するミラーの影響が排除される。その結果として、この撮像ユニットは、対象物の放射線画像を鮮明かつ高感度に取得することを可能にする。
いくつかの態様において、ミラーは、入力面の法線に重なる位置に配置された第1ミラーであって、第1ミラーの反射面と入力面との間に鋭角を形成する第1ミラーを有し、ラインスキャンカメラは、入力面の法線方向に出力されるシンチレーション光を検出する。入力面の法線方向に対して傾斜した方向に出力されるシンチレーション光を検出した場合には、レンズの拡大率の違いに起因して画像にあおり(パース)が生じる。その場合、画像がぼやける可能性がある。これに対して、上記構成によれば、第1ミラーが、入力面の法線方向に出力されるシンチレーション光を反射し、そのシンチレーション光がラインスキャンカメラによって検出される。よって、ラインスキャンカメラは、あおり(パース)のない画像を取得できる。放射線画像がぼやけることが防止される。
いくつかの態様において、スリットは、搬送方向において、シンチレータおよび第1ミラーと、ラインスキャンカメラとの間に位置している。この構成によれば、シンチレータと第1ミラーの間の鋭角の範囲内に、放射線をうまく導入することができる。すなわち、シンチレータと第1ミラーの間の鋭角の範囲内に、照射領域をうまく形成することができる。一方で、ラインスキャンカメラに必要とされる光路長を確保しやすい。
いくつかの態様において、鋭角は40度以上50度以下の範囲内の角度である。この構成によれば、入力面の法線方向に出力されたシンチレーション光は、第1ミラーによって反射され、搬送方向に対して10度以内の傾斜角をもってラインスキャンカメラによって検出される。よって、筐体を搬送方向に長くして、その筐体内にラインスキャンカメラを設置できる。撮像ユニット全体が搬送経路に沿ったスリムな形状となり、撮像ユニットのコンパクト化が図られる。
いくつかの態様において、スリットは、搬送方向においてシンチレータの上流又は下流に位置している。この構成によれば、ミラーを所望の位置に配置しつつ、そのミラーが放射線の照射領域に干渉しないように、照射領域を形成しやすい。
いくつかの態様において、ラインスキャンカメラの光軸は搬送方向に平行である。各要素に対し、上記したように、シンチレータの入力面は搬送方向に平行である。この構成によれば、角度に関する複雑な調整等が不要である。たとえば、ラインスキャンカメラの光軸の調整や、ラインスキャンカメラのレンズ焦点距離に伴う視野角に応じたミラーとレンズの距離調整が容易になる。
撮像ユニットのいくつかの態様において、筐体内に設置され、入力面とは反対側の面から出力されるシンチレーション光を検出する第2ラインスキャンカメラを更に備える。シンチレータの入力面とは反対側の面に近い領域では、比較的高いエネルギーの放射線が変換される。ラインスキャンカメラが、低エネルギーの放射線感度に優れた放射線画像を取得する一方で、第2ラインスキャンカメラが、高エネルギーの放射線画像を同時に取得する。これにより、デュアルエナジー方式の撮像ユニットが実現される。このようなシンチレータ両面観察方式は、従来型のデュアルエナジーユニットよりも大きいエネルギー差を得ることができ、異物検出性能が向上する。この撮像ユニットは、たとえば、軽元素からなる物質の弁別性能に優れる。
本開示の別の態様として、対象物に向けて放射線を出力する放射線源と、対象物を搬送方向に搬送する搬送装置と、照射領域が搬送装置の搬送経路を含むように、搬送装置に対して取り付けられた上記いずれかの撮像ユニットと、を備える放射線画像取得システムが提供されてもよい。この放射線画像取得システムでは、上記いずれかの撮像ユニットを備えることで、放射線画像がぼやけることが防止され、また放射線に対するミラーの影響が排除される。よって、この放射線画像取得システムは、対象物の放射線画像を鮮明かつ高感度に取得することを可能にする。
本開示の更に別の態様は、対象物の放射線画像を取得する放射線画像取得システムであって、対象物に向けて放射線を出力する放射線源と、対象物を搬送方向に搬送する搬送装置と、搬送装置によって搬送される対象物を透過した放射線を入力する入力面を有するシンチレータと、入力面から出力されるシンチレーション光を反射する1つまたは複数のミラーと、ミラーで反射されたシンチレーション光を検出するラインスキャンカメラであって、搬送方向に対応するスキャン方向とスキャン方向に直交するライン方向とを有するラインスキャンカメラと、を備え、シンチレータは、入力面が搬送方向に平行で且つライン方向に平行であるように配置され、ミラーは、放射線源の焦点とシンチレータの入力面とを結ぶ照射領域の外部に位置している。
この放射線画像取得システムでは、搬送装置によって搬送される対象物に、放射線源から放射線が照射される。対象物を透過した放射線が、シンチレータの入力面に入力される。そして、その入力面からシンチレーション光が出力される。シンチレータの入力面に近い領域では、比較的低いエネルギーの放射線が変換される。よって、ラインスキャンカメラは、低エネルギーの放射線感度に優れた放射線画像を取得できる。このことは、たとえば軽元素からなる物質の検出に有利にはたらく。シンチレータの入力面が、搬送方向に平行であり、且つラインスキャンカメラのライン方向に平行であるので、対象物の中の異なる部分(たとえば搬送方向における上流端と下流端など)において、拡大率は変化しない。よって、放射線画像がぼやけることが防止される。さらにはミラーが放射線の照射領域の外部に位置しているので、対象物を透過した放射線は、ミラーを通ることなくシンチレータの入力面に入力される。これにより、放射線に対するミラーの影響が排除される。その結果として、この放射線画像取得システムは、対象物の放射線画像を鮮明かつ高感度に取得することを可能にする。
いくつかの態様において、ミラーは、入力面の法線に重なる位置に配置された第1ミラーであって、第1ミラーの反射面と入力面との間に鋭角を形成する第1ミラーを有し、ラインスキャンカメラは、入力面の法線方向に出力されるシンチレーション光を検出する。入力面の法線方向に対して傾斜した方向に出力されるシンチレーション光を検出した場合には、レンズの拡大率の違いに起因して画像にあおり(パース)が生じる。その場合、画像がぼやける可能性がある。これに対して、上記構成によれば、第1ミラーが、入力面の法線方向に出力されるシンチレーション光を反射し、そのシンチレーション光がラインスキャンカメラによって検出される。よって、ラインスキャンカメラは、あおり(パース)のない画像を取得できる。放射線画像がぼやけることが防止される。
いくつかの態様において、放射線源が、第1ミラーの反射面を含む第1仮想平面と入力面を含む第2仮想平面との間に焦点が位置するように配置される。この構成によれば、シンチレータと第1ミラーの間の鋭角の範囲内に、放射線源からの放射線をうまく導入することができる。すなわち、シンチレータと第1ミラーの間の鋭角の範囲内に、照射領域をうまく形成することができる。
いくつかの態様において、鋭角は40度以上50度以下の範囲内の角度である。この構成によれば、入力面の法線方向に出力されたシンチレーション光は、第1ミラーによって反射され、搬送方向に対して10度以内の傾斜角をもってラインスキャンカメラによって検出される。よって、搬送装置に沿って、ラインスキャンカメラを設置しやすい。撮像ユニット全体が搬送装置に沿ったスリムな形状となり、撮像ユニットのコンパクト化が図られる。
いくつかの態様において、照射領域は、搬送方向においてシンチレータの上流又は下流に形成される。この構成によれば、ミラーを所望の位置に配置しつつ、そのミラーが放射線の照射領域に干渉しないように、照射領域を形成しやすい。
いくつかの態様において、ラインスキャンカメラの光軸は搬送方向に平行である。上記したように、シンチレータの入力面は搬送方向に平行である。この構成によれば、各要素に対し、角度に関する複雑な調整等が不要である。たとえば、ラインスキャンカメラの光軸の調整や、ラインスキャンカメラのレンズ焦点距離に伴う視野角に応じたミラーとレンズの距離調整が容易になる。
放射線画像取得システムのいくつかの態様において、入力面とは反対側の面から出力されるシンチレーション光を検出する第2ラインスキャンカメラを更に備える。シンチレータの入力面とは反対側の面に近い領域では、比較的高いエネルギーの放射線が変換される。ラインスキャンカメラが、低エネルギーの放射線感度に優れた放射線画像を取得する一方で、第2ラインスキャンカメラが、高エネルギーの放射線画像を同時に取得する。これにより、デュアルエナジー式の撮像ユニットが実現される。このようなシンチレータ両面観察方式は、従来型のデュアルエナジーユニットよりも大きいエネルギー差を得ることができ、異物検出性能が向上する。この放射線画像取得システムは、たとえば、軽元素からなる物質の弁別性能に優れる。
本開示のいくつかの態様によれば、放射線画像がぼやけることが防止され、また放射線に対するミラーの影響が排除される。その結果として、対象物の放射線画像が鮮明かつ高感度に取得される。
以下、本開示の実施形態について、図面を参照しながら説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明は省略する。また、各図面は説明用のために作成されたものであり、説明の対象部位を特に強調するように描かれている。そのため、図面における各部材の寸法比率は、必ずしも実際のものとは一致しない。
図1に示されるように、第1実施形態の放射線画像取得システム1は、対象物Aの放射線画像を取得するための装置である。対象物Aは、たとえば、軽元素からなる物質を含有する。放射線画像取得システム1は、たとえば、食品検査やバッテリー検査などの分野に適用される。食品検査の分野では、たとえば異物の噛み込みの有無が検査される。放射線画像取得システム1は、後述する独自の構成を有することにより、特に、軽元素からなる物質の弁別性能に優れている。このような物質としては、たとえば、食品のくず、髪の毛、ビニール、虫、肉の中の骨等が挙げられる。放射線画像取得システム1は、たとえばインラインX線検査に適用される。
放射線画像取得システム1は、対象物Aに向けて白色X線等の放射線を出力する放射線源2と、対象物Aを所定の搬送方向Dに搬送する搬送装置20と、搬送装置20によって搬送される対象物Aを透過した放射線の入力に応じてシンチレーション光を発生させるシンチレータ6と、シンチレータ6の放射線の入力面6aから出力されるシンチレーション光を検出するラインスキャンカメラ3と、放射線画像取得システム1のいくつかの機能を制御し、かつ放射線画像を作成するコンピュータ10と、を備えている。このように、放射線画像取得システム1は、シンチレータ表面観察方式のX線撮影システムである。放射線画像取得システム1は、低エネルギーのX線感度に優れている。
放射線源2は、X線出射部からコーンビームX線を出力する。放射線源2は、コーンビームX線の焦点2aを有する。放射線源2は、たとえばマイクロフォーカスX線源であってもよく、ミリフォーカスX線源であってもよい。放射線源2から出射されるX線は放射線束を形成する。この放射線束が存在する領域が、放射線源2の出力領域14(図3参照)である。放射線画像取得システム1では、出力領域14内のX線のうちの一部である照射領域12内のX線が、シンチレータ6の入力面6aに入力される。すなわち、照射領域12は、出力領域14に包含され、出力領域14よりも狭い領域である。照射領域12は、その中心に位置する中心軸Lを含む。
搬送装置20は、たとえば周回軌道を移動するベルトコンベア21を有しており、ベルトコンベア21の搬送面21a上に、対象物Aが載置または保持されている。ベルトコンベア21は、搬送ステージ或いは搬送部である。搬送装置20は、ベルトコンベア21を駆動する図示しない駆動源を備えている。搬送装置20は、対象物Aを搬送方向Dに一定の速度で搬送するように構成されている。言い換えれば、対象物Aは、搬送装置20によって所定の搬送経路P上で搬送される。本実施形態において、搬送方向Dは水平方向である。また搬送経路Pは直線状であり、搬送経路Pが延びる方向は搬送方向Dに平行である。搬送装置20における対象物Aの搬送タイミングや搬送速度は、予め設定されており、コンピュータ10の制御部10aによって制御される。
なお、放射線画像取得システム1は、あらゆる形態の搬送装置20に対応可能である。たとえば、搬送方向Dおよび搬送経路Pは、水平であってもよいが、水平に対して傾斜していてもよい。搬送経路Pは、直線状でなくてもよく、たとえば曲線状であってもよい。その場合、搬送方向Dは、搬送経路Pのうちの照射領域12に重複する部分における接線であってもよい。搬送装置20は、物理的な搬送面21aを有していなくてもよい。たとえば、搬送装置20は、エアによって対象物Aを浮き上がらせた状態で搬送してもよい。また、搬送装置20は、対象物Aを空中に放出することで対象物Aを搬送してもよい。その場合、搬送経路Pは、たとえば放物線状であってもよい。
搬送装置20は、ベルトコンベア21を有する形態に限られない。搬送装置20は、たとえば、複数のローラを含むローラコンベアを有してもよい。ローラコンベアはベルトを有していないため、ベルトの影響を排除できる。ローラとローラの間に隙間(スリット形状の開口)が形成されている点も、ベルトコンベアに比して有利である。ローラコンベアを用いることにより、ベルトに起因するX線減衰が低減される。後述する放射線源2の配置および照射領域12の配置(斜め照射)を考慮すると、ローラコンベアは有効に利用され得る。ローラコンベアは、低エネルギーのX線感度が重視される放射線画像取得システム1に適した搬送手段である。2つ又はそれ以上のベルトコンベアを搬送方向に設置し、それらのベルトコンベアの隙間からX線を照射する形態としてもよい。この形態の場合、ベルトコンベアを使用しながら、ローラコンベアの場合と同様に、ベルトの影響を排除することができる。
図1~図3に示されるように、放射線画像取得システム1は、搬送装置20に沿うように設置された撮像ユニット30を備える。撮像ユニット30は、たとえば、搬送装置20に対して取り付けられており、搬送装置20に固定されている。撮像ユニット30は、ベルトコンベア21の周回に干渉しないように取り付けられている。搬送装置20がローラコンベアである場合も同様である。撮像ユニット30は、ベルトコンベアまたはローラコンベア等の搬送部の移動に干渉しないよう、搬送部から幾らかの空隙をもって配置されている。
撮像ユニット30は、直方体形状の筐体13を有する。筐体13は、たとえば、X線を遮蔽することができる材質からなる。筐体13は、いわゆる暗箱である。筐体13は、たとえばアルミニウム製または鉄製であってよい。筐体13は防護材を含んでもよく、その防護材として鉛が用いられてもよい。筐体13は、搬送方向Dに長くなった形状を有する。筐体13は、上下方向に対面する上壁部13aおよび底壁部13bと、搬送方向Dに対面する第1側壁部13cおよび第2側壁部13dと、搬送方向Dに直交する水平な検出幅方向に対面する第3側壁部13eおよび第4側壁部13f(図4参照)とを含む。撮像ユニット30は、筐体13の第1側壁部13cおよび第2側壁部13dが非常に小さくなっており、搬送装置20に沿ったコンパクトな装置になっている。搬送方向Dは、図中に示される紙面に平行なx方向に平行である。上記検出幅方向は、図中に示される紙面に垂直なy方向に平行である。上下方向は、図中に示される紙面に平行なz方向に平行である。
上壁部(壁部)13aは、搬送装置20の搬送経路Pに対面するように配置されている。言い換えれば、上壁部13aは、筐体13の6つの壁部のうち搬送装置20にもっとも近接している。この上壁部13aが、搬送装置20に取り付けられてもよい。
撮像ユニット30は、シンチレータ6の入力面6aから、入力面6aの法線B方向に出力されるシンチレーション光を撮像できるように構成されている。そのために、撮像ユニット30は、入力面6aの法線B方向に出力されるシンチレーション光を反射する第1ミラー7を備える。すなわち、撮像ユニット30は、ミラーとして、1つのみの第1ミラー7を備える。第1ミラー7は、その反射面7aを入力面6aに斜めに対面させるようにして、入力面6aの法線Bに重なる位置に配置されている。
筐体13内には、シンチレータ6と、第1ミラー7と、ラインスキャンカメラ3とが設置されている。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、筐体13内で固定されている。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6および第1ミラー7は、第1側壁部13cの近傍に配置されている。ラインスキャンカメラ3は、第2側壁部13dの近傍に配置されている。シンチレータ6は、たとえばシンチレータホルダ8に保持されて、たとえば水平に配置されている。第1ミラー7は、たとえばミラーホルダ9に保持されて、水平に対して傾斜するように配置されている。
シンチレータ6は、平板状の波長変換部材である。シンチレータ6は、検出幅方向(y方向)に長い長方形状である(図4参照)。シンチレータ6は、たとえばGd2O2S:Tb、Gd2O2S:Pr、CsI:Tl、CdWO4、CaWO4、Gd2SiO5:Ce、Lu0.4Gd1.6SiO5、Bi4Ge3O12、Lu2SiO5:Ce、Y2SiO5、YAlO3:Ce、Y2O2S:Tb、YTaO4:Tm、YAG:Ce、YAG:Pr、YGAG:Ce、YGAG:Pr、GAGG:Ce等からなる。シンチレータ6の厚さは数μm~数mmの範囲で検出する放射線のエネルギー帯によって適切な値に設定されている。シンチレータ6は、対象物Aを透過したX線を可視光に変換する。比較的低いエネルギーのX線は、シンチレータ6の入力面6aで変換され、入力面6aから出力される。また、比較的高いエネルギーのX線は、シンチレータ6の裏面6bで変換され、裏面6bから出力される。本実施形態では、シンチレータホルダ8は上方に向けて開放されており、シンチレータ6の入力面6aを露出させている。一方で裏面6bは閉鎖されていてもよいが、露出していてもよい。なお、シンチレータ6は、1枚のシンチレータから構成されていてもよいし、2枚のシンチレータを貼り合わせるなど組み合わせたものでもよい。2枚のシンチレータの組み合わせる際に2枚のシンチレータの間に遮光や反射の性質を有した板や膜を挟んでもよい。2枚のシンチレータの種類は同じでもよく、異なっていてもよい。
第1ミラー7は、たとえば、アルミ蒸着したガラスや、鏡面加工した金属からなるミラーである。第1ミラー7は、検出幅方向(y方向)に長い長方形状である(図4参照)。第1ミラー7は、入力面6aから法線B方向に出力されたシンチレーション光を反射させるのに十分な面積をもった反射面7aを備える。第1ミラー7は、反射面7aとシンチレータ6の入力面6aとの間に、たとえば鋭角を形成している。ここで、第1ミラー7が入力面6aに対して角度をなすということは、第1ミラー7がシンチレータ6に近接することを意味するものではない。第1ミラー7がシンチレータ6に近接してもよいが第1ミラー7がシンチレータ6から離間してもよい。第1ミラー7がシンチレータ6から離間する場合には、反射面7aの延長面と入力面6aの延長面とによって角度が定義される。第1ミラー7は、入力面6aの法線B方向に出力されるシンチレーション光を反射する。
上記の鋭角は、40度以上50度以下の範囲内の角度であることが好ましい。鋭角は、45度であることが更に好ましい。鋭角は、放射線源2の配置や後述するスリット15の位置に基づいて決定されてもよい。鋭角の大きさによって、ラインスキャンカメラ3の配置が適宜に調整されてもよい。鋭角の大きさによって、別の1つまたは複数のミラーが更に設置されてもよい。
ラインスキャンカメラ3は、対象物Aの移動に合わせて撮像を行う。ラインスキャンカメラ3は、シンチレータ6の入力面6aから出力されるシンチレーション光を集光するレンズ部3aと、レンズ部3aにより集光されたシンチレーション光を検出するセンサ部3bとを有するレンズカップリング型の検出器である。レンズ部3aは、1つのレンズを含み、このレンズの焦点がシンチレータ6の入力面6aに合わせられている。センサ部3bは、イメージセンサ3cを含む。イメージセンサ3cは、たとえば、TDI(時間遅延積分)駆動が可能なエリアイメージセンサである。イメージセンサ3cは、たとえば、CCDエリアイメージセンサである。
イメージセンサ3cは、複数のCCDがピクセル方向に一列に並べられた素子列が、対象物Aの移動方向に対応して、積分方向に複数段並べられた構成を有する。図2に示されるように、ラインスキャンカメラ3は、対象物Aの搬送方向Dに対応するスキャン方向d1と、スキャン方向d1に直交するライン方向d2とを有する。このスキャン方向d1が上記の積分方向であり、図中のz方向に平行である。ライン方向d2が上記のピクセル方向であり、図中のy方向に平行である。スキャン方向d1は、第1ミラー7を介して、搬送方向Dから変換された方向である。本実施形態では、スキャン方向は、搬送方向Dから90度だけ変換されている。
イメージセンサ3cは、制御部10aによって、対象物Aの移動に合わせて電荷転送を行うように制御される。すなわち、イメージセンサ3cは、搬送装置20による対象物Aの移動に同期して、受光面3dにおける電荷転送を行う。これにより、S/N比のよい放射線画像を得ることができる。なお、イメージセンサ3cがエリアイメージセンサである場合には、コンピュータ10の制御部10aが放射線源2とラインスキャンカメラ3を制御して、ラインスキャンカメラ3の撮像タイミングに合わせて放射線源2を点灯させる構成であってもよい。ステージにエンコーダを設けて、エンコーダからの信号でラインスキャンカメラ3を制御してもよい。
第1ミラー7の反射面7aとシンチレータ6の入力面6aとの間の鋭角が45度である場合、ラインスキャンカメラ3のレンズ部3aの光軸F(図3参照)は、たとえば搬送方向Dに平行である。ラインスキャンカメラ3は、入力面6aの法線B方向に出力されるシンチレーション光を検出する。
シンチレータ6は、入力面6aが搬送方向Dに平行で、且つ上記のライン方向d2に平行であるように配置されている。すなわち、シンチレータ6の入力面6aは、xy平面に平行である。
図1~図4に示されるように、筐体13の上壁部13aには、放射線源2から出力されたX線を通過させるためのスリット15が形成されている。図4に示されるように、スリット15は、検出幅方向(y方向)に長い長方形状である。スリット15は、長方形状の周縁15aを含む。図3に示されるように、シンチレータ6の入力面6aは、スリット15を通過した照射領域12内のX線を入力する。
スリット15および照射領域12についてより詳しく説明すると、図3に示されるように、放射線源2から出力された出力領域14のX線のうち、照射領域12のみがスリット15を通過するようになっている。残りの領域のX線は筐体13内には進入しない。すなわち、スリット15は、照射領域12を規定する。スリット15の中央を、照射領域12の中心軸Lが通っている。照射領域12は、スリット15の周縁15aとシンチレータ6の入力面6aとを直線状に結ぶ領域(四角錐状の領域)として規定される。言い換えれば、照射領域12は、放射線源2の焦点2aとシンチレータ6の入力面6aとを直線状に結ぶ領域として規定される。ここで、「シンチレータ6の入力面6a」とは、シンチレーション光の出力に有効にはたらく領域のみを意味する。たとえば、矩形の入力面6a全体のうち、シンチレータホルダ8によって覆われている領域などは、照射領域12を規定するにあたっての「シンチレータ6の入力面6a」には含まれない。
図1および図2に示されるように、スリット15は、搬送方向Dにおいて、シンチレータ6および第1ミラー7と、ラインスキャンカメラ3との間に位置している。放射線源2が、第1ミラー7の反射面7aを含む第1仮想平面P1とシンチレータ6の入力面6aを含む第2仮想平面P2との間に焦点2aが位置するように配置されている(図2参照)。また、スリット15は、搬送方向Dにおいてシンチレータ6の下流に位置している。そして、図3に示されるように、第1ミラー7は、X線の照射領域12の外部に位置している。言い換えれば、第1ミラー7は、照射領域12に干渉しないような位置および姿勢(傾きも含む)で設置されている。第1ミラー7は、反射面7aが照射領域12の境界面に沿うように、入力面6aの法線Bに対して傾斜して配置されている。ラインスキャンカメラ3のレンズ部3aが集光するシンチレーション光は、照射領域12をz方向(入力面6aの法線B方向)に横断し、その後照射領域12をx方向(搬送方向D)に横断する。
なお、放射線源2は、種々の態様で設置されてもよい。たとえば、図5(a)に示されるように、照射角すなわち出力領域14の狭い放射線源2を斜めに設置してもよい。この場合、出力領域14が照射領域12と同等であってもよい。また図5(b)に示されるように、照射角すなわち出力領域14の広い放射線源2を鉛直方向に設置してもよい。この場合、出力領域14の中心軸は鉛直方向(z方向)に向けられるが、照射領域12の中心軸Lはシンチレータ6の入力面6aに交差する。放射線源2が、第1ミラー7の反射面7aを含む第1仮想平面P1上、または、第1仮想平面P1よりも上側(第2仮想平面P2とは反対側)に位置するように配置されてもよい。
コンピュータ10は、たとえば、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)、および入出力インターフェイス等を有する。コンピュータ10は、放射線源2およびラインスキャンカメラ3を制御する制御部10a(制御プロセッサ)と、ラインスキャンカメラ3から出力された放射線画像データに基づいて、対象物Aの放射線画像を作成する画像処理部10b(画像処理プロセッサ)と、を有する。画像処理部10bは、放射線画像データを入力し、入力した放射線画像データに対して画像処理等の所定の処理を実行する。コンピュータ10には表示装置11が接続されている。画像処理部10bは、作成した放射線画像を表示装置11に出力する。制御部10aは、ユーザの入力等により記憶された放射線源2の管電圧や管電流の値に基づいて、放射線源2を制御する。制御部10aは、ユーザの入力等により記憶されたラインスキャンカメラ3の露光時間等に基づいて、ラインスキャンカメラ3を制御する。制御部10aと画像処理部10bとは、別々のプロセッサでもよいし、同じプロセッサでもよい。また、コンピュータ10は、制御部10aの機能と画像処理部10bの機能を実行できるようにプログラムされていてもよい。なお、コンピュータ10は、マイコンやFPGA(Field-Programmable Gate Array)で構成されていてもよい。
続いて、放射線画像取得システム1の動作すなわち放射線画像の取得方法について説明する。まず、搬送装置20を用いて、対象物Aを搬送方向Dに搬送する(搬送工程)。それと同時に、対象物Aに向けて、放射線源2から白色X線等の放射線を出力する(放射線出力工程)。対象物Aを透過した放射線は入力面6aに入力される(入力工程)。このとき、放射線は第1ミラー7に干渉しないので、第1ミラー7による影響が排除されている。次に、シンチレータ6によって放射線からシンチレーション光への変換が行われる(変換工程)。入力面6aから出力されるシンチレーション光は、第1ミラー7によって反射させられる(反射工程)。そしてラインスキャンカメラ3のレンズ部3aによって、シンチレーション光がイメージセンサ3cに結像される(結像工程)。イメージセンサ3cは、レンズ部3aにより結像されたシンチレーション光(シンチレーション像)を撮像する(撮像工程)。この撮像工程では、対象物Aの移動に同期して電荷転送(TDI動作)が行われる。ラインスキャンカメラ3は、撮像により得られた放射線画像データをコンピュータ10の画像処理部10bに出力する。
コンピュータ10の画像処理部10bは、放射線画像データを入力し、入力した放射線画像データに対して画像処理等の所定の処理を実行し、放射線画像を作成する(画像作成工程)。画像処理部10bは、作成した放射線画像を表示装置11に出力する。表示装置11は、画像処理部10bから出力された放射線画像を表示する。以上の工程を経て、対象物Aの表面観察による放射線画像が得られる。
本実施形態の放射線画像取得システム1および撮像ユニット30では、搬送装置20によって搬送される対象物Aに、放射線源2から放射線が照射される。対象物Aを透過した放射線が、筐体13の上壁部13aに形成されたスリット15を通過する。筐体13内には、シンチレータ6と、第1ミラー7と、ラインスキャンカメラ3とが設置されており、撮像に必要な機器がユニット化されている。筐体13内に入射した放射線は、シンチレータ6の入力面6aに入力される。そして、その入力面6aからシンチレーション光が出力される。シンチレータ6の入力面6aに近い領域では、比較的低いエネルギーの放射線が変換される。よって、ラインスキャンカメラ3は、低エネルギーの放射線感度に優れた放射線画像を取得できる。このことは、たとえば対象物Aに含まれた、軽元素からなる物質の検出に有利にはたらく。シンチレータ6の入力面6aが、搬送方向Dに平行であり、且つラインスキャンカメラ3のライン方向d2に平行であるので、対象物Aの中の異なる部分(たとえば搬送方向Dにおける上流端と下流端など)において、拡大率は変化しない。たとえば、図6(b)に示されるように、入力面6aが搬送方向Dに対して角度を有すると、X線投影像の拡大率の違いから、TDI積算の際に放射線画像IMG2がぼやけてしまう(図6(d)参照)。本実施形態では、図6(a)に示されるように、入力面6aが搬送方向Dに平行なので、放射線画像IMG1がぼやけることが防止される(図6(c)参照)。さらには、拡大率が変化せず、第1ミラー7が放射線の照射領域12の外部に位置しているので、対象物Aを透過した放射線は、第1ミラー7を通ることなくシンチレータ6の入力面6aに入力される。これにより、放射線に対する第1ミラー7の影響が排除される。すなわち、シンチレータ6の入力面6aから出力されるシンチレーション光を第1ミラー7の影響なく検出することができる。その結果として、この放射線画像取得システム1および撮像ユニット30は、対象物の放射線画像を鮮明かつ高感度に取得することを可能にする。また、放射線画像取得システム1によれば、より高速に放射線画像を取得することができる。さらには、S/N比のよい放射線画像を取得することができる。
また、シンチレータ表面観察方式を用いた場合、高管電圧下において軽減素の撮像が可能である。放射線源2は、管電圧および管電流の出力に制約があり、低管電圧の場合、管電流の制約により出力が得られにくいという特性を有する。シンチレータ表面観察方式を用いることにより、管電流の制約を受けにくくなり、放射線源2の効率の良いところでX線撮像することが可能である。その結果として、タクトタイムの向上が期待できる。
ラインスキャンカメラ3は、入力面6aの法線B方向に出力されるシンチレーション光を検出する。図7(b)に示されるように、入力面6aの法線B方向に対して傾斜した方向に出力されるシンチレーション光を検出した場合には、レンズの拡大率の違いに起因してTDI積算による放射線画像IMG4にあおり(パース)が生じる(図7(d)参照)。その場合、放射線画像IMG4がぼやけてしまう。これに対して、図7(a)に示されるように、ラインスキャンカメラ3が入力面6aの法線B方向に出力されるシンチレーション光を検出すると、放射線画像IMG3にあおり(パース)は生じない(図7(c)参照)。その結果、鮮明な放射線画像IMG3が得られる。ところで、ラインスキャンカメラ3が搬送ステージに干渉することなく入力面6aを撮影するには、図7(a)に示されるように入力面6aと搬送ステージとの間に距離を確保する必要があるとも思われる。そうすると、FDD(Focus-Detector Distance;焦点2aからシンチレータ6までの距離)とFOD(Focus-Object Distance;焦点2aから対象物Aまでの距離)との差を確保する必要が生じる。しかし、入力面6aと対象物Aとの距離が大きくなるとX線幾何学倍率が大きくなり、X線投影像が拡大される。拡大率が大きくなると焦点ボケの影響も大きくなってしまう。そこで、拡大率をできるだけ等倍(1倍)に近づけることが望ましい。本実施形態では、第1ミラー7を介在させることで、入力面6aと対象物Aとの距離を縮小しつつ、入力面6aの法線B方向に出力されるシンチレーション光がラインスキャンカメラ3によって検出される。よって、ラインスキャンカメラ3が、あおり(パース)のない画像を取得できる。放射線画像がぼやけることが防止される。
スリット15は、搬送方向Dにおいて、シンチレータ6および第1ミラー7と、ラインスキャンカメラ3との間に位置している。また別の観点では、放射線源2が、第1ミラー7の反射面7aを含む第1仮想平面P1とシンチレータ6の入力面6aを含む第2仮想平面P2との間に焦点2aが位置するように配置されている。これらの構成によれば、シンチレータ6と第1ミラー7の間の鋭角の範囲内に、放射線をうまく導入することができる。すなわち、シンチレータ6と第1ミラー7の間の鋭角の範囲内に、照射領域12をうまく形成することができる。一方で、ラインスキャンカメラ3に必要とされる光路長を確保しやすい。
図8(a)に示されるように、シンチレータ6の入力面6aと搬送方向Dが平行でることが求められ、またラインスキャンカメラ3は入力面6aの法線B方向に出力されるシンチレーション光を検出することが求められる。しかも、対象物Aと入力面6aとの距離をできるだけ縮小したい。その結果、第1ミラー7が採用される。しかし、図8(b)に示されるように、第1ミラー7を設置すると、第1ミラー7がX線の照射領域12に被ってしまう。それにより、X線に含まれる軟X線成分が減衰してしまう。その結果、低エネルギーの放射線感度を損ねてしまう。その解決策として、図8(c)に示されるように、X線の照射領域12が第1ミラー7と被らないように、照射領域12の位置と角度が調整される。たとえば、照射領域12の中心軸Lが入力面6aに対して45度になるように、放射線源2の位置およびスリット15の位置が調整される。
シンチレータ6と第1ミラー7の間の鋭角は、40度以上50度以下の範囲内の角度である。この構成によれば、入力面6aの法線B方向に出力されたシンチレーション光は、第1ミラー7によって反射され、搬送方向Dに対して10度以内の傾斜角をもってラインスキャンカメラ3によって検出される。よって、搬送装置20に沿って、ラインスキャンカメラ3を設置しやすい。撮像ユニット30全体が搬送装置20に沿ったスリムな形状となり、撮像ユニット30のコンパクト化が図られる。鋭角が45度であると、この効果は一層好適に発揮される。
照射領域12は、搬送方向Dにおいてシンチレータ6の下流に形成される。この構成によれば、第1ミラー7を所望の位置に配置しつつ、第1ミラー7が放射線の照射領域12に干渉しないように、照射領域12を形成しやすい。
ラインスキャンカメラ3の光軸Fは搬送方向Dに平行である。上述したように、シンチレータ6の入力面6aは搬送方向Dに平行である。この構成によれば、各要素に対し、角度に関する複雑な調整等が不要である。たとえば、ラインスキャンカメラ3の光軸Fの調整や、ラインスキャンカメラ3のレンズの焦点距離に伴う視野角に応じた第1ミラー7とレンズの距離調整が容易になる。
続いて、図9を参照して、第2実施形態に係る放射線画像取得システム1Aおよび撮像ユニット30Aについて説明する。放射線画像取得システム1Aが第1実施形態の放射線画像取得システム1と違う点は、撮像ユニット30Aが、筐体13A内に設置され、入力面6aとは反対側の裏面6bから出力されるシンチレーション光を検出する第2ラインスキャンカメラ4を更に備えた点である。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6、第3ミラー17、および第2ラインスキャンカメラ4は、光学的に結合されている。シンチレータホルダ8は上方および下方に向けて開放されており、シンチレータ6の入力面6aおよび裏面6bを露出させている。第2ラインスキャンカメラ4は、ラインスキャンカメラ3と同様の構成を有している。すなわち、第2ラインスキャンカメラ4は、レンズ部4aと、イメージセンサ4cを含むセンサ部4bとを有する。第3ミラー17は、たとえばミラーホルダ19に保持されて、水平に対して傾斜するように配置されている。第3ミラー17は、その反射面17aを裏面6bに斜めに対面させるようにして、裏面6bの法線Cに重なる位置に配置されている。第2ラインスキャンカメラ4のレンズ部4aの光軸Gは、たとえば搬送方向Dに平行である。第2ラインスキャンカメラ4は、第3ミラー17の反射面17aを介して、裏面6bの法線C方向に出力されるシンチレーション光を検出する。第2ラインスキャンカメラ4の搬送方向Dの位置は、たとえば、ラインスキャンカメラ3における光路長と第2ラインスキャンカメラ4における光路長とが等しくなるように設定される。なお、同じレンズを使用する場合、たとえば、同じ焦点距離を有するレンズを使用する場合、光路長が等しくなるように設定するのがよい。一方、異なるレンズを使用する場合、たとえば、異なる焦点距離を有するレンズを使用する場合には、光路長は、必ずしも等しくならない。
2つのカメラを用いる場合に、種々の態様が採用され得る。たとえば、第2ラインスキャンカメラ4とラインスキャンカメラ3(第1ラインスキャンカメラ)は、2つのカメラとして独立し個別に制御できるようになっていてもよい。第2ラインスキャンカメラ4とラインスキャンカメラ3が、制御基板を共有するなどして、1つの制御系から2つのセンサを制御できるようになっていてもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4で視野が異なる場合に、画像処理にて位置合わせを行ってもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4で画角が異なる場合に、座標変換を含む画像処理にて位置合わせを行ってもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4で画素数が異なる場合に、座標変換や拡大・縮小により画素合わせをしてもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4で露光時間が異なるなどに起因して取得ライン数が異なる場合に、補間や平均化、または間引き処理によりライン数を等しくしてもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4で拡大率が異なる場合に拡大率補正処理によって拡大率をあわせてもよい。ラインスキャンカメラ3と第2ラインスキャンカメラ4でイメージセンサが異なる場合に、補正処理をして画素数などをあわせてもよい。
シンチレータ6の裏面6bに近い領域では、比較的高いエネルギーの放射線が変換される。ラインスキャンカメラ3が、低エネルギーの放射線感度に優れた放射線画像を取得する一方で、第2ラインスキャンカメラ4が、高エネルギーの放射線画像を同時に取得する。これにより、デュアルエナジー方式の撮像ユニットが実現される。このようなシンチレータ両面観察方式は、従来型のデュアルエナジーユニットよりも大きいエネルギー差を得ることができ、異物検出性能が向上する。この撮像ユニット30Aは、たとえば、軽元素からなる物質(髪の毛、ビニール、虫等)の弁別性能に優れる。
以上、本開示の実施形態について説明したが、本発明は上記実施形態に限られない。本発明には、種々の変形形態が含まれ得る。
たとえば、図10に示されるように、第2実施形態の第1変形形態として、縦型の筐体13Bを備えたシンチレータ両面観察方式の撮像ユニット30Bが提供されてもよい。この撮像ユニット30Bでは、入力面6aの法線B方向に出力されたシンチレーション光を反射させる2つのミラーである第1ミラー7と第2ミラー7Bとが設置される。また、裏面6bの法線C方向に出力されたシンチレーション光を反射させる2つのミラーである第3ミラー17と第4ミラー17Bとが設置される。シンチレータ6、第1ミラー7、第2ミラー7B、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6、第3ミラー17、第4ミラー17B、および第2ラインスキャンカメラ4は、光学的に結合されている。この形態は、後述の2センサ1レンズ方式においても実施可能である。
図11に示されるように、第2実施形態の第2変形形態として、縦型の筐体13Cを備えたシンチレータ両面観察方式の撮像ユニット30Cが提供されてもよい。この撮像ユニット30Bでは、入力面6aの法線B方向に出力されたシンチレーション光を反射させる2つのミラーである第1ミラー7と第2ミラー7Cとが設置される。シンチレータ6、第1ミラー7、第2ミラー7C、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6および第2ラインスキャンカメラ4は、光学的に結合されている。第1ミラー7および第2ミラー7Cの両方が、照射領域12の外部に位置する。X線の中心軸Lの傾斜角度θ1は、たとえば45度である。裏面6bの法線C方向に出力されたシンチレーション光を反射させるミラーはなく、第2ラインスキャンカメラ4が、法線Cに重なる位置に配置されている。この形態では、筐体13の上壁部13aとの距離が短くなっている。
図12に示されるように、第2実施形態の第3変形形態として、横型の筐体13Dを備えたシンチレータ両面観察方式の撮像ユニット30Dが提供されてもよい。この撮像ユニット30Dでは、ラインスキャンカメラ3と第2ラインスキャンカメラ4が、筐体13D内の斜め下に設置されている。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6、第3ミラー17、および第2ラインスキャンカメラ4は、光学的に結合されている。第1ミラー7の傾斜角度はたとえば30度~40度である。第3ミラー17の傾斜角度はたとえば50度~60度である。X線の中心軸Lの傾斜角度θ1は、たとえば45度である。第1ミラー7の傾斜角度は、X線がケラれないような最低の角度に設定されており、45度よりも小さい。
図13に示されるように、第1実施形態の第1変形形態として、斜めに設置された搬送装置20に撮像ユニット30が取り付けられた放射線画像取得システム1Eが提供されてもよい。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、光学的に結合されている。既存の検査装置において、放射線源2が水平に設置され、搬送装置20が斜めに設置されている場合がある。たとえば、対象物Aは、滑走面である搬送面21a上を自由落下する。そのような場合に、撮像ユニット30も斜めに設置することができる。このように、撮像ユニット30は、設置される角度や姿勢を選ばないので、既存の検査装置に容易に組み込める。撮像ユニット30の汎用性が高められている。この放射線画像取得システム1Eでは、スリット15は、たとえば、搬送方向Dにおいてシンチレータ6の上流に位置している。なお、図13に示される斜め搬送型式の放射線画像取得システム1Eにおいて、両面観察方式が適用されてもよい。
図14に示されるように、図13に示した斜め搬送に適用される更なる変形例として、シンチレータ6および第1ミラー7の部分のみ斜めの形状をなす筐体13Fが提供されてもよい。この撮像ユニット30Fでは、筐体13Fの内部に2つのミラーである第1ミラー7と第2ミラー7Fとが設置される。シンチレータ6、第1ミラー7、第2ミラー7F、およびラインスキャンカメラ3は、光学的に結合されている。これらの第1ミラー7と第2ミラー7Fとによって、シンチレーション光を水平に取り出すことができる。ラインスキャンカメラ3は、水平に配置される。この撮像ユニット30Fによれば、たとえばラインスキャンカメラ3が設置された筐体を水平に設置して、放射線源2からのX線も垂直に(鉛直に)照射できる。対象物Aは斜めに搬送されるが、斜めになっている区間を短くできるというメリットがある。なお、図14に示される斜め搬送型式かつ水平設置型の撮像ユニットにおいて、両面観察方式が適用されてもよい。
撮像ユニットが斜めに設置される形態は、たとえば、対象物Aを空中に放出するような搬送装置に対しても有効に適用できる。
また、上記各実施形態のラインスキャンカメラ3または第2ラインスキャンカメラ4に代えて、マルチレンズマルチセンサのカメラが適用されてもよい。すなわち、1台の高解像度カメラの替わりに、複数台の低画素カメラを使用することができる。センサの低画素化により、シンチレータ6とカメラの間の距離を小さくすることができる。その結果、筐体全体を小型化することができる。
図15に示されるように、2台のカメラ25A,25Bを並列にして設置してもよい。たとえば、2台のカメラ25A,25Bは、搬送方向Dと直交する方向に並べられる。カメラ25A,25Bの各カメラ基板25a、25bに対して、共通のメイン基板26が接続される。この形態でも、シンチレータ6、第1ミラー7、およびカメラ25Aは、光学的に結合され、シンチレータ6、第1ミラー7、およびカメラ25Bは、光学的に結合されている。この形態によれば、高分解能が得られ、筐体のサイズを抑えることができる。並列されるカメラの台数を3台以上としてもよい。高解像度の2台のカメラを並列にしてもよいし、1または複数台の低解像度カメラと1または複数台の高解像度カメラとを併用してもよい。たとえば、2台のカメラを並列した場合には画素ピッチを半分にでき、3台のカメラを並列した場合には画素ピッチを3分の1にできる。
また、図16(a)または図16(b)に示されるように、1レンズ2センサのカメラが適用されてもよい。つまり、1つのイメージサークル内に、2つのTDIセンサ(又はラインセンサ)28,28が配置される。シンチレータ6、第1ミラー7、レンズ27、および一方のセンサ28は、光学的に結合され、シンチレータ6、第3ミラー17、レンズ27、および他方のセンサ28は、光学的に結合されている。この場合、レンズは1つのみで足りるので、コスト又はサイズの面で有利になり得る。なお、焦点距離L1を一定とした場合に、検出幅を広くするためには距離L2を長くする必要があり、レンズ27とミラー7,17との間の距離L2が長くなると、シンチレータ6とミラー7,17との間の距離L3も長くなる。一方、センサ28,28間の距離L4には限界がある。
また、TDIセンサではなく、エリアセンサを用いてストップアンドゴーでの撮像を行う方法も考えられる。たとえば、図17に示されるように、1つのセンサ29上に、低エネルギー蛍光像領域29aと高エネルギー蛍光像領域29bとを設けてもよい。任意の領域29a,29bを切り出してタイリングすることで、低エネルギーの放射線画像と低高エネルギーの放射線画像を撮像することができる。この方法によれば、1レンズに対して1センサでの撮像が可能である。
また、シンチレータホルダ8またはミラーホルダ9に関しても、種々の変形態様が考えられる。図18に示されるように、シンチレータ6に対する第1ミラー7および第3ミラー17の位置を調整可能な調整機構35が設置されてもよい。シンチレータ6および第1ミラー7は光学的に結合され、シンチレータ6および第3ミラー17は光学的に結合されている。この調整機構35は、たとえば第1ミラー7のミラーホルダ9および第3ミラー17のミラーホルダ19に連結されて、第1ミラー7および第3ミラー17を入力面6aの法線B方向および裏面6bの法線C方向に沿ってそれぞれ移動させる。これにより、シンチレーション光の高さを任意に変更可能である。第1ミラー7および第3ミラー17が連動してシンチレータ6に関して対称に移動してもよいし、第1ミラー7および第3ミラー17が別個に移動してもよい。
また図19(a)および図19(b)に示されるように、第1ミラー7および第3ミラー17が共通のミラーユニットホルダ36に固定されていてもよい。シンチレータ6および第1ミラー7は光学的に結合され、シンチレータ6および第3ミラー17は光学的に結合されている。法線B,C方向に距離が比較的小さいミラーユニットホルダ36と、これとは別に、法線B,C方向に距離が比較的大きいミラーユニットホルダ37とを用意し、これらを交換することで、シンチレーション光の高さを変更可能である。
また図20(a)および図20(b)に示されるように、シンチレータホルダ8を前後させることで、シンチレータ6に対する第1ミラー7および第3ミラー17の位置を調整可能な調整機構38が設置されてもよい。シンチレータ6および第1ミラー7は光学的に結合され、シンチレータ6および第3ミラー17は光学的に結合されている。図21に示されるように、たとえば搬送方向Dに細長いシンチレータ6Aをシンチレータホルダ8に保持させて、放射線の照射位置(図中の中心軸Lの位置)を搬送方向Dに変更することで、シンチレータ6に対する第1ミラー7および第3ミラー17の位置を調整してもよい。シンチレータ6Aおよび第1ミラー7は光学的に結合され、シンチレータ6Aおよび第3ミラー17は光学的に結合されている。この場合、シンチレータ6と第1ミラー7および第3ミラー17との位置関係(距離)を無段階に柔軟に変更可能である。
図22(a)および図22(b)に示されるように、放射線入射窓であるスリット15の位置を変更できる機構が設けられてもよい。シンチレータ6および第1ミラー7は光学的に結合され、シンチレータ6および第3ミラー17は光学的に結合されている。たとえば、筐体13Aの上壁部13aには大きめの開口45が形成されており、この開口45よりも小さなスリット15が形成された調整プレート47が設置されてもよい。この場合、調整プレートは筐体13Aの壁部の一部である。調整プレート47は、たとえば四隅に位置する4つのビス46等で上壁部13aに固定される。調整プレート47には搬送方向Dに長い4つの長孔47aが形成されおり、これらの長孔47aにビス46が挿通されている。調整プレート47は、長孔47aの範囲内で、搬送方向Dの位置を変更可能になっている。
上述したように、シンチレータ6と第1ミラー7および第3ミラー17との距離を物理的に変更する手段と、シンチレータ6と第1ミラー7および第3ミラー17との相対的な位置を変更することにより距離を変更する手段とが考えられる。
また、図23に示されるように、筐体13Aの底壁部13bに、複数の保持穴50を形成しておき、その保持穴50にピン49を係合させることで、第2ラインスキャンカメラ4(およびラインスキャンカメラ3)の搬送方向Dにおける位置を調整してもよい。シンチレータ6、第1ミラー7、およびラインスキャンカメラ3は、光学的に結合されている。シンチレータ6、第3ミラー17、および第2ラインスキャンカメラ4は、光学的に結合されている。カメラの焦点距離やシンチレータ6の長さによって、第1ミラー7および第3ミラー17とラインスキャンカメラ3および第2ラインスキャンカメラ4との距離が変わる。複数のレンズ(焦点距離)やシンチレータ6の長さに対して、カメラの位置を容易に調整することができる。
ラインスキャンカメラや第2ラインスキャンカメラは、TDIセンサを含む態様に限られない。ラインスキャンカメラや第2ラインスキャンカメラは、1つまたは複数のラインスキャンセンサを含んでもよい。すなわち、2以上の複数列を有するマルチラインセンサを用いて時間遅延積分と同様の処理を行ってもよいし、マルチラインセンサのそれぞれのラインの信号を読みだし信号処理によってラインセンサ画像などの画像を作成してもよい。シングルラインセンサを用いて画像を作成してもよい。シングルラインセンサであっても画素内で拡大率の影響を受けるので、画像がぼやける可能性がある。拡大率の影響を受けた場合、画素内を蛍光像が斜めに移動することにより解像度の低下が生じ、画像がぼやける可能性がある。本開示の放射線画像取得システムおよび撮像ユニットによれば、放射線画像がぼやけることを防止できる。
フォトダイオードアレイのデジタル信号加算を行ってもよい。多段フォトダイオードアレイを用いる場合には、速度を厳密に合わせる必要が軽減される。フォトダイオードアレイを用いる場合であれば、検出部が斜めでもよい。すなわち、入力面6aが搬送方向Dに平行でなくてもよい。拡大率の補正やラインディレイを行ってから加算または平均化などの画像処理を行うことで、本開示の放射線画像取得システムが狙いとする効果を得ることができる。
放射線の照射領域12は、筐体13のスリット15によって形成されるのではなく、放射線源2とシンチレータ6との間に、複数の遮蔽壁(または遮蔽板)からなる照射領域規定部が設置されてもよい。その場合に、照射角すなわち出力領域14の広い放射線源2が用いられてもよい。
本開示のいくつかの態様によれば、放射線画像がぼやけることが防止され、また放射線に対するミラーの影響が排除される。その結果として、対象物の放射線画像が鮮明かつ高感度に取得される。
1,1A,1E…放射線画像取得システム、2…放射線源、2a…焦点、3…ラインスキャンカメラ、6…シンチレータ、6a…入力面、6b…裏面、7…第1ミラー、12…照射領域、13,13A,13B,13C,13D,13F…筐体、13a…上壁部(壁部)、15…スリット、15a…周縁、20…搬送装置、30,30A,30B,30C,30D,30F…撮像ユニット、A…対象物、B…法線、C…法線、F…光軸、G…光軸、P…搬送経路。
Claims (15)
- 所定の搬送経路上で搬送方向に搬送される対象物の放射線画像を取得するための撮像ユニットであって、
前記搬送経路に対面するように配置される壁部を有し、放射線を通過させるためのスリットが前記壁部に形成された筐体と、
前記筐体内に設置され、前記スリットを通過した前記放射線を入力する入力面を有するシンチレータと、
前記筐体内に設置され、前記入力面から出力されるシンチレーション光を反射する1つまたは複数のミラーと、
前記筐体内に設置され、前記ミラーで反射された前記シンチレーション光を検出するラインスキャンカメラであって、前記搬送方向に対応するスキャン方向と前記スキャン方向に直交するライン方向とを有する前記ラインスキャンカメラと、を備え、
前記シンチレータは、前記入力面が前記搬送方向に平行で且つ前記ライン方向に平行であるように配置され、
前記ミラーは、前記スリットの周縁と前記シンチレータの前記入力面とを結ぶ照射領域の外部に位置している、撮像ユニット。 - 前記ミラーは、前記入力面の法線に重なる位置に配置された第1ミラーであって、前記第1ミラーの反射面と前記入力面との間に鋭角を形成する前記第1ミラーを有し、
前記ラインスキャンカメラは、前記入力面の法線方向に出力されるシンチレーション光を検出する、請求項1に記載の撮像ユニット。 - 前記スリットは、前記搬送方向において、前記シンチレータおよび前記第1ミラーと、前記ラインスキャンカメラとの間に位置している、請求項2に記載の撮像ユニット。
- 前記鋭角は40度以上50度以下の範囲内の角度である、請求項2または3に記載の撮像ユニット。
- 前記スリットは、前記搬送方向において前記シンチレータの上流又は下流に位置している、請求項1~4のいずれか一項に記載の撮像ユニット。
- 前記ラインスキャンカメラの光軸は前記搬送方向に平行である、請求項1~5のいずれか一項に記載の撮像ユニット。
- 前記筐体内に設置され、前記入力面とは反対側の面から出力されるシンチレーション光を検出する第2ラインスキャンカメラを更に備える、請求項1~6のいずれか一項に記載の撮像ユニット。
- 前記対象物に向けて放射線を出力する放射線源と、
前記対象物を前記搬送方向に搬送する搬送装置と、
前記照射領域が前記搬送装置の前記搬送経路を含むように、前記搬送装置に対して取り付けられた請求項1~7のいずれか一項に記載の撮像ユニットと、を備える、放射線画像取得システム。 - 対象物の放射線画像を取得する放射線画像取得システムであって、
前記対象物に向けて放射線を出力する放射線源と、
前記対象物を搬送方向に搬送する搬送装置と、
前記搬送装置によって搬送される前記対象物を透過した前記放射線を入力する入力面を有するシンチレータと、
前記入力面から出力されるシンチレーション光を反射する1つまたは複数のミラーと、
前記ミラーで反射された前記シンチレーション光を検出するラインスキャンカメラであって、前記搬送方向に対応するスキャン方向と前記スキャン方向に直交するライン方向とを有する前記ラインスキャンカメラと、を備え、
前記シンチレータは、前記入力面が前記搬送方向に平行で且つ前記ライン方向に平行であるように配置され、
前記ミラーは、前記放射線源の焦点と前記シンチレータの前記入力面とを結ぶ照射領域の外部に位置している、放射線画像取得システム。 - 前記ミラーは、前記入力面の法線に重なる位置に配置された第1ミラーであって、前記第1ミラーの反射面と前記入力面との間に鋭角を形成する前記第1ミラーを有し、
前記ラインスキャンカメラは、前記入力面の法線方向に出力されるシンチレーション光を検出する、請求項9に記載の放射線画像取得システム。 - 前記放射線源が、前記第1ミラーの前記反射面を含む第1仮想平面と前記入力面を含む第2仮想平面との間に前記焦点が位置するように配置される、請求項10に記載の放射線画像取得システム。
- 前記鋭角は40度以上50度以下の範囲内の角度である、請求項10または11に記載の放射線画像取得システム。
- 前記照射領域は、前記搬送方向において前記シンチレータの上流又は下流に形成される、請求項9~12のいずれか一項に記載の放射線画像取得システム。
- 前記ラインスキャンカメラの光軸は前記搬送方向に平行である、請求項9~13のいずれか一項に記載の放射線画像取得システム。
- 前記入力面とは反対側の面から出力されるシンチレーション光を検出する第2ラインスキャンカメラを更に備える、請求項9~14のいずれか一項に記載の放射線画像取得システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/310,820 US11729344B2 (en) | 2019-02-27 | 2019-12-23 | Imaging unit and radiation image acquisition system |
| EP19917470.7A EP3933447A4 (en) | 2019-02-27 | 2019-12-23 | IMAGING UNIT AND RADIATION IMAGING SYSTEM |
| KR1020217026013A KR20210127939A (ko) | 2019-02-27 | 2019-12-23 | 촬상 유닛 및 방사선 화상 취득 시스템 |
| CN201980093115.0A CN113474681B (zh) | 2019-02-27 | 2019-12-23 | 摄像单元和放射线图像取得系统 |
| US18/214,658 US12058472B2 (en) | 2019-02-27 | 2023-06-27 | Imaging unit and radiation image acquisition system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019034828A JP6719004B1 (ja) | 2019-02-27 | 2019-02-27 | 撮像ユニットおよび放射線画像取得システム |
| JP2019-034828 | 2019-02-27 |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/310,820 A-371-Of-International US11729344B2 (en) | 2019-02-27 | 2019-12-23 | Imaging unit and radiation image acquisition system |
| US18/214,658 Continuation US12058472B2 (en) | 2019-02-27 | 2023-06-27 | Imaging unit and radiation image acquisition system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020174850A1 true WO2020174850A1 (ja) | 2020-09-03 |
Family
ID=71402351
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/050419 WO2020174850A1 (ja) | 2019-02-27 | 2019-12-23 | 撮像ユニットおよび放射線画像取得システム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11729344B2 (ja) |
| EP (1) | EP3933447A4 (ja) |
| JP (1) | JP6719004B1 (ja) |
| KR (1) | KR20210127939A (ja) |
| CN (1) | CN113474681B (ja) |
| WO (1) | WO2020174850A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4206745A4 (en) * | 2020-11-25 | 2024-08-14 | Hamamatsu Photonics Kk | IMAGING UNIT AND IMAGING SYSTEM |
| EP4212915A4 (en) * | 2020-10-23 | 2024-09-04 | Hamamatsu Photonics Kk | IMAGING UNIT, X-RAY IMAGE ACQUISITION SYSTEM AND X-RAY IMAGE ACQUISITION METHODS |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6089786A (ja) * | 1983-10-24 | 1985-05-20 | Hitachi Ltd | 放射線検出器 |
| JP2000510729A (ja) | 1996-05-13 | 2000-08-22 | ユニバーシテイ・オブ・マサチユセツツ・メデイカル・センター | 定量的放射線撮像法のためのシステム |
| JP2002365368A (ja) * | 2001-06-04 | 2002-12-18 | Anritsu Corp | X線検出器及び該検出器を用いたx線異物検出装置 |
| JP2009002805A (ja) * | 2007-06-21 | 2009-01-08 | Rigaku Corp | 小角広角x線測定装置 |
| JP2012154734A (ja) | 2011-01-25 | 2012-08-16 | Hamamatsu Photonics Kk | 放射線画像取得装置 |
| WO2017056680A1 (ja) | 2015-09-30 | 2017-04-06 | 浜松ホトニクス株式会社 | 放射線画像取得システムおよび放射線画像取得方法 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6089786U (ja) * | 1983-11-22 | 1985-06-19 | ティーディーケイ株式会社 | スイツチング電源 |
| EP0368369B1 (en) | 1985-12-24 | 1993-10-27 | Loral Vought Systems Corporation | Radiographic inspection system |
| CA2254877A1 (en) | 1996-05-13 | 1997-11-20 | Andrew Karellas | A system for quantitative radiographic imaging |
| WO2000004403A1 (fr) | 1998-07-15 | 2000-01-27 | Keiichi Kuroda | Unite d'imagerie a rayonnement numerique |
| JP3850711B2 (ja) | 2001-10-29 | 2006-11-29 | 株式会社東芝 | 放射線利用検査装置 |
| EP1857836B1 (en) * | 2006-05-15 | 2009-10-21 | Eldim Sa | Device and method for discriminating cerenkov and scintillation radiation |
| DE102008007595B4 (de) * | 2008-02-06 | 2018-04-05 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und Verfahren zum Erfassen eines Bildes |
| JP5638914B2 (ja) | 2010-10-27 | 2014-12-10 | 株式会社アールエフ | 放射線撮像装置 |
| US9750958B2 (en) * | 2012-02-23 | 2017-09-05 | Steven M. Ebstein | Dosimetric scintillating screen detector for charged particle radiotherapy quality assurance |
| JP5944254B2 (ja) | 2012-07-20 | 2016-07-05 | 浜松ホトニクス株式会社 | 放射線画像取得装置 |
| US9865066B2 (en) * | 2014-05-06 | 2018-01-09 | Astrophysics Inc. | Computed tomography system for cargo and transported containers |
| JP5973040B2 (ja) * | 2015-08-06 | 2016-08-17 | 浜松ホトニクス株式会社 | 放射線画像取得装置 |
| JP2018141781A (ja) | 2017-02-27 | 2018-09-13 | キヤノン・コンポーネンツ株式会社 | 放射線検出器および放射線検出装置 |
-
2019
- 2019-02-27 JP JP2019034828A patent/JP6719004B1/ja active Active
- 2019-12-23 WO PCT/JP2019/050419 patent/WO2020174850A1/ja unknown
- 2019-12-23 US US17/310,820 patent/US11729344B2/en active Active
- 2019-12-23 KR KR1020217026013A patent/KR20210127939A/ko not_active Application Discontinuation
- 2019-12-23 EP EP19917470.7A patent/EP3933447A4/en active Pending
- 2019-12-23 CN CN201980093115.0A patent/CN113474681B/zh active Active
-
2023
- 2023-06-27 US US18/214,658 patent/US12058472B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6089786A (ja) * | 1983-10-24 | 1985-05-20 | Hitachi Ltd | 放射線検出器 |
| JP2000510729A (ja) | 1996-05-13 | 2000-08-22 | ユニバーシテイ・オブ・マサチユセツツ・メデイカル・センター | 定量的放射線撮像法のためのシステム |
| JP2002365368A (ja) * | 2001-06-04 | 2002-12-18 | Anritsu Corp | X線検出器及び該検出器を用いたx線異物検出装置 |
| JP2009002805A (ja) * | 2007-06-21 | 2009-01-08 | Rigaku Corp | 小角広角x線測定装置 |
| JP2012154734A (ja) | 2011-01-25 | 2012-08-16 | Hamamatsu Photonics Kk | 放射線画像取得装置 |
| WO2017056680A1 (ja) | 2015-09-30 | 2017-04-06 | 浜松ホトニクス株式会社 | 放射線画像取得システムおよび放射線画像取得方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3933447A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4212915A4 (en) * | 2020-10-23 | 2024-09-04 | Hamamatsu Photonics Kk | IMAGING UNIT, X-RAY IMAGE ACQUISITION SYSTEM AND X-RAY IMAGE ACQUISITION METHODS |
| EP4206745A4 (en) * | 2020-11-25 | 2024-08-14 | Hamamatsu Photonics Kk | IMAGING UNIT AND IMAGING SYSTEM |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230344958A1 (en) | 2023-10-26 |
| JP6719004B1 (ja) | 2020-07-08 |
| US20220141397A1 (en) | 2022-05-05 |
| EP3933447A4 (en) | 2022-11-30 |
| EP3933447A1 (en) | 2022-01-05 |
| CN113474681B (zh) | 2024-03-29 |
| JP2020139816A (ja) | 2020-09-03 |
| US11729344B2 (en) | 2023-08-15 |
| KR20210127939A (ko) | 2021-10-25 |
| US12058472B2 (en) | 2024-08-06 |
| CN113474681A (zh) | 2021-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7457187B2 (ja) | 撮像ユニット | |
| US20230344958A1 (en) | Imaging unit and radiation image acquisition system | |
| CN203396722U (zh) | 放射线图像取得装置 | |
| CN203616268U (zh) | 放射线图像取得装置 | |
| CN203396723U (zh) | 放射线图像取得装置 | |
| CN103339684A (zh) | 闪烁器面板 | |
| US11237278B2 (en) | Radiation image acquisition system and radiation image acquisition method | |
| CN113490865B (zh) | 放射线摄像单元中的闪烁器的安装结构 | |
| JP6671413B2 (ja) | 放射線画像取得装置 | |
| WO2022085275A1 (ja) | 撮像ユニット、放射線画像取得システム、および放射線画像取得方法 | |
| WO2022113507A1 (ja) | 撮像ユニット及び撮像システム | |
| JP6718832B2 (ja) | 放射線検出器および放射線検出装置 | |
| US20240310534A1 (en) | Radiation detector | |
| TW202409555A (zh) | X射線檢查裝置及x射線檢查方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19917470 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019917470 Country of ref document: EP Effective date: 20210927 |