WO2019172413A1 - クレーン - Google Patents
クレーン Download PDFInfo
- Publication number
- WO2019172413A1 WO2019172413A1 PCT/JP2019/009292 JP2019009292W WO2019172413A1 WO 2019172413 A1 WO2019172413 A1 WO 2019172413A1 JP 2019009292 W JP2019009292 W JP 2019009292W WO 2019172413 A1 WO2019172413 A1 WO 2019172413A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- camera
- hook
- image
- crane
- display device
- Prior art date
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
Abstract
安全性の向上と作業効率の向上を実現させたクレーンを提供することを課題とする。ブーム(8)を備えたクレーン(1)において、カメラ(22)と、カメラ(22)が撮影した画像を表示する表示装置(27)と、カメラ(22)及び表示装置(27)に接続されて情報の処理を行う制御装置(28)と、を具備し、制御装置(28)が、カメラ(22)が撮影した画像における被写体(例えばサブフック(19))を追従し、被写体(サブフック(19))を含んだ箇所を切り出して表示装置(27)に表示する、とした。
Description
本発明は、クレーンに関する。詳しくは、安全性の向上と作業効率の向上を実現させたクレーンに関する。
従来より、代表的な作業車両であるクレーンが知られている(特許文献1参照)。クレーンは、主に車両とクレーン装置で構成されている。車両は、複数の車輪を備え、走行自在に構成されている。クレーン装置は、ブームのほかにワイヤロープとウインチとフックを備え、荷物を運搬自在に構成されている。
ところで、カメラを用いて画像を撮影し、画像から所定箇所を切り出して表示装置に表示するクレーンが提案されている(特許文献2参照)。このようなクレーンにおいても、オペレータは、カメラを被写体に向けるパン-チルト操作と画像上の被写体を拡大又は縮小するズーム操作を行う必要がある。しかし、被写体が移動する場合は、被写体を追従するようにパン-チルト操作とズーム操作を行わなければならず、これらの操作を連続的且つ同時に行うのは困難であるという問題があった。また、カメラをブームに取り付けた場合は、ブームの起伏等によって画像上の被写体が拡大したり縮小したりしてしまうので、被写体やその周囲の状況が分かりづらくなるという問題もあった。更に、被写体がフック或いはフックに吊り下げられた荷物を指す場合は、これらの移動方向に特段の注意を払うべきところ、移動方向を含む一部領域を切り出した画像によって安全性を確認したいという要望もあった。そこで、これらの問題を解決するとともに要望を満たすことで、安全性の向上と作業効率の向上を実現させたクレーンが求められていたのである。
安全性の向上と作業効率の向上を実現させたクレーンを提供する。
本発明のクレーンにおいては、
ブームを備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記カメラが撮影した画像における被写体を追従し、当該被写体を含んだ箇所を切り出して前記表示装置に表示する、ことが好ましい。
ブームを備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記カメラが撮影した画像における被写体を追従し、当該被写体を含んだ箇所を切り出して前記表示装置に表示する、ことが好ましい。
本発明のクレーンにおいては、
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を具備し、
前記被写体を前記フック又は前記フックに吊り下げられた荷物として、
前記被写体を前記フックとする場合、
前記カメラが撮影した画像における前記フックを追従し、当該フックを含んだ箇所を前記表示装置に表示し、
前記被写体を前記荷物とする場合、
前記カメラが撮影した画像における前記荷物を追従し、当該荷物を含んだ箇所を前記表示装置に表示する、ものである。
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を具備し、
前記被写体を前記フック又は前記フックに吊り下げられた荷物として、
前記被写体を前記フックとする場合、
前記カメラが撮影した画像における前記フックを追従し、当該フックを含んだ箇所を前記表示装置に表示し、
前記被写体を前記荷物とする場合、
前記カメラが撮影した画像における前記荷物を追従し、当該荷物を含んだ箇所を前記表示装置に表示する、ものである。
本発明のクレーンにおいては、
前記カメラのズーム倍率を変更し、前記被写体の大きさを変更して前記表示装置に表示する、ものである。
前記カメラのズーム倍率を変更し、前記被写体の大きさを変更して前記表示装置に表示する、ものである。
本発明のクレーンにおいては、
前記カメラから前記被写体までの距離が近づく場合に前記カメラのズーム倍率を低くし、前記カメラから前記被写体までの距離が遠ざかる場合に前記カメラのズーム倍率を高くして前記表示装置に表示する、ものである。
前記カメラから前記被写体までの距離が近づく場合に前記カメラのズーム倍率を低くし、前記カメラから前記被写体までの距離が遠ざかる場合に前記カメラのズーム倍率を高くして前記表示装置に表示する、ものである。
本発明のクレーンにおいては、
ブームと、
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記フックの移動方向を把握し、前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ものである。
ブームと、
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記フックの移動方向を把握し、前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ものである。
本発明のクレーンにおいては、
前記ブーム又は前記フックに前記カメラが取り付けられ、
前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ものである。
前記ブーム又は前記フックに前記カメラが取り付けられ、
前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ものである。
本発明のクレーンによれば、カメラと、カメラが撮影した画像を表示する表示装置と、カメラ及び表示装置に接続されて情報の処理を行う制御装置と、を具備している。そして、制御装置が、カメラが撮影した画像における被写体を追従し、被写体を含んだ箇所を切り出して表示装置に表示する。かかるクレーンによれば、被写体を含んだ箇所が切り出されて表示されるため、被写体と被写体の周囲の状況を確認できる。従って、安全性の向上と作業効率の向上を実現できる。
本発明のクレーンによれば、ブームから垂下するワイヤロープと、ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を具備している。そして、被写体をフック又はフックに吊り下げられた荷物として、被写体をフックとする場合、カメラが撮影した画像におけるフックを追従し、当該フックを含んだ箇所を表示装置に表示し、被写体を荷物とする場合、カメラが撮影した画像における荷物を追従し、当該荷物を含んだ箇所を表示装置に表示する。かかるクレーンによれば、フック又は荷物を含んだ箇所が切り出されて表示されるため、フックとフックの周囲の状況、又は荷物W及び荷物Wの周囲の状況を確認できる。
本発明のクレーンにおいては、カメラのズーム倍率を変更し、被写体の大きさを変更して表示装置に表示する。かかるクレーンによれば、被写体の大きさをオペレータが見やすい大きさに変更して表示装置に表示できるため、被写体と被写体の周囲の状況が分かりやすくなる。
本発明のクレーンによれば、カメラから被写体までの距離が近づく場合にカメラのズーム倍率を低くし、カメラから被写体までの距離が遠ざかる場合にカメラのズーム倍率を高くして表示装置に表示する。かかるクレーンによれば、画像における被写体の大きさがあまり変わらないので、被写体と被写体の周囲の状況が分かりやすくなる。
本発明のクレーンによれば、カメラと、カメラが撮影した画像を表示する表示装置と、カメラ及び表示装置に接続されて情報の処理を行う制御装置と、を具備している。そして、制御装置が、フックの移動方向を把握し、カメラが撮影した画像からフックの移動方向を含む一部領域を切り出して表示装置に表示する。かかるクレーンによれば、フックの移動方向を含む一部領域が切り出されて表示されるため、フックの移動方向の状況を確認できる。従って、安全性の向上と作業効率の向上を実現できる。
本発明のクレーンによれば、ブーム又はフックにカメラが取り付けられ、カメラが撮影した画像からフックの移動方向を含む一部領域を切り出して表示装置に表示する。かかるクレーンによれば、ブーム視点又はフック視点の画像からフックの移動方向の状況を確認できる。
本願に開示する技術的思想は、以下に説明するクレーン1のほか、他のクレーンにも適用できる。
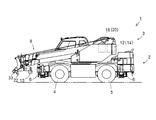
まず、図1を用いて、第一実施形態に係るクレーン1について説明する。
クレーン1は、主に車両2とクレーン装置3で構成されている。
車両2は、左右一対の前輪4と後輪5を備えている。また、車両2は、荷物Wの運搬作業を行う際に接地させて安定を図るアウトリガ6を備えている。更に、車両2は、これらを駆動するためのエンジンやトランスミッション、アクチュエータを備えている。
クレーン装置3は、旋回用油圧モータ7によって旋回自在となっている(矢印A参照)。クレーン装置3は、その後部から前方へ突き出すようにブーム8を備えている。ブーム8は、ブーム起伏用油圧シリンダ9によって起伏自在となっている(矢印B参照)。また、ブーム8は、伸縮用油圧シリンダ10によって伸縮自在となっている(矢印C参照)。なお、ブーム8には、その先端部分にジブ15を有している。ジブ15は、ジブ起伏用油圧シリンダ16によって起伏自在となっている(矢印E参照)。なお、本願において、ジブ15はブーム8の一部分である。
加えて、ブーム8には、メインワイヤロープ11が架け渡されている。ブーム8の基端側近傍には、メインワイヤロープ11を巻き付けたメインウインチ12が配置され、ブーム8の先端部分には、メインワイヤロープ11によってメインフック13が垂下されている。更に、メインウインチ12は、油圧モータ14と一体的に構成されており、メインワイヤロープ11の巻き入れ及び巻き出しを可能としている。そのため、メインフック13は、油圧モータ14によって昇降自在となっている(矢印D参照)。
加えて、ブーム8及びジブ15には、サブワイヤロープ17が架け渡されている。ブーム8の基端側近傍には、サブワイヤロープ17を巻き付けたサブウインチ18が配置され、ジブ15の先端部分には、サブワイヤロープ17によってサブフック19が垂下されている。更に、サブウインチ18は、油圧モータ20と一体的に構成されており、サブワイヤロープ17の巻き入れ及び巻き出しを可能としている。そのため、サブフック19は、油圧モータ20によって昇降自在となっている(矢印F参照)。
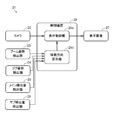
次に、図2を用いて、カメラシステム21について説明する。
カメラシステム21は、カメラ22、ブーム姿勢検出器23、ジブ姿勢検出器24、メイン繰出量検出器25、サブ繰出量検出器26、表示装置27、制御装置28で構成されている。
カメラ22は、被写体とその周囲を撮影するものである。本クレーン1において、カメラ22は、いわゆる広角カメラであって、ブーム8の先端部分に取り付けられている(図1参照)。なお、カメラ22の台数は、複数としてもよい。例えば、ブーム8の先端部分の両側面に取り付けられているフートピン33(図1参照)に1台ずつカメラを取り付ける。フートピン33は、ジブ15の取り付けに用いられるものであり、ブーム8の側面から左右に突き出ている。フートピン33にそれぞれ取り付けられたカメラの撮影範囲を併せると、ほぼ全周を撮影範囲とすることができる。
ブーム姿勢検出器23は、ブーム8の姿勢を検出するものである。ブーム8の姿勢は、ブーム8の水平面に対する起伏角度G(図1参照)、ブーム8の基端部分から先端部分までの伸縮長さH(図1参照)で表される。
ジブ姿勢検出器24は、ジブ15の姿勢を検出するものである。ジブ15の姿勢は、ジブ15の水平面に対する起伏角度I(図1参照)で表される。但し、ジブ15が伸縮可能である場合は、起伏角度I(図1参照)に加えて、ジブ15の基端部分から先端部分までの伸縮長さJ(図1参照)で表される。
メイン繰出量検出器25は、メインワイヤロープ11の繰り出し量を検出するものである。メインワイヤロープ11の繰り出し量は、メインウインチ12から繰り出されるメインワイヤロープ11の長さである。
サブ繰出量検出器26は、サブワイヤロープ17の繰り出し量を検出するものである。サブワイヤロープ17の繰り出し量は、サブウインチ18から繰り出されるサブワイヤロープ17の長さである。
表示装置27は、カメラ22が撮影した画像を表示するものである。画像の表示態様については後述する。
制御装置28は、カメラ22及び表示装置27に接続されて情報の処理を行うものである。制御装置28は、表示制御部28a、フック位置算出部28bを有している。制御装置28には、種々のプログラムやデータが格納されている。
表示制御部28aは、カメラ22が撮影した画像から所定の箇所を切り出して拡大又は縮小するものである。表示制御部28aは、カメラ22、表示装置27、フック位置算出部28bに接続されている。
フック位置算出部28bは、カメラ22が撮影した画像からメインフック13やサブフック19の位置を算出するものである。フック位置算出部28bは、ブーム姿勢検出器23、ジブ姿勢検出器24、メイン繰出量検出器25、サブ繰出量検出器26、表示制御部28aに接続されている。
このような構成により、カメラシステム21は、カメラ22が撮影した画像から被写体を含んだ箇所を切り出して表示装置27に拡大又は縮小して表示することができる。こうして、カメラシステム21は、オペレータによるパン-チルト操作を不要としつつ、ほぼ同様の画像を表示装置27に表示することができる。また、カメラシステム21は、オペレータによるズーム操作を不要としつつ、ほぼ同様の画像を表示装置27に表示することができる。なお、かかる処理は、ソフトウェアに基づいて電気的に行われるため、従来の機械的な動作によるものよりも格段に速くなっている。
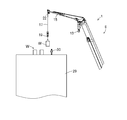
次に、図3から図5を用いて、画像の表示態様について説明する。ここでは、建築物29の屋上に荷物Wを運搬している状況を想定して説明する。なお、本願においては、被写体をサブフック19として説明するが、被写体をメインフック13としても成り立つことは自明である。また、カメラが1台として説明するが、カメラが複数台としても、複数台のカメラのうちいずれかのカメラで被写体を撮影し、被写体が撮影された画像を用いることにより、成り立つことも自明である。
クレーン1は、ジブ15を起伏させて荷物Wを運搬している。建築物29の屋上には、複数の荷物Wが既に運搬されており、これら荷物Wの近傍に作業者30が立っている。
図4Aから図4Cは、ジブ15の起伏角度Iが大きい順にカメラ22が撮影した画像を示している。図4Dは、図4Aにおけるサブフック19を含む箇所を切り出して拡大した画像を示している。図4Eは、図4Bにおけるサブフック19を含む箇所を切り出して拡大した画像を示している。そして、図4Fは、図4Cにおけるサブフック19を含む箇所を切り出して拡大した画像を示している。
制御装置28は、カメラ22が撮影した画像を表示装置27に表示することができる(図4Aから図4C参照)。なお、カメラ22が撮影した画像は、その外縁部分で歪んでいる。そのため、歪みを補正することにより、歪みのない平面画像を表示するのが好ましい。更に、画像にジブ15を含めることにより、ジブ15と建築物29の衝突を監視できるようにしてもよい。
更に、制御装置28は、カメラ22が撮影した画像からサブフック19を含んだ箇所を切り出して表示装置27に拡大して表示することができる(図4Dから図4F参照)。このため、オペレータは、サブフック19とサブフック19の周囲の状況を確認できる。ひいては、サブフック19に吊り下げられた荷物Wと荷物Wの周囲の状況を確認できる。なお、オペレータは、斜め上方からサブフック19或いは荷物Wを見ることができるので、建築物29の屋上からサブフック19或いは荷物Wまでの高さを確認することも可能である。
このように、本クレーン1は、カメラ22と、カメラ22が撮影した画像を表示する表示装置27と、カメラ22及び表示装置27に接続されて情報の処理を行う制御装置28と、を具備している。そして、制御装置28が、カメラ22が撮影した画像における被写体(例えばサブフック19)を追従し、被写体(19)を含んだ箇所を切り出して表示装置27に表示する。かかるクレーン1によれば、被写体(19)を含んだ箇所が切り出されて表示されるため、被写体(19)と被写体(19)の周囲の状況を確認できる。従って、安全性の向上と作業効率の向上を実現できる。
具体的に説明すると、本クレーン1は、ブーム8から垂下するワイヤロープ(メインワイヤロープ11・サブワイヤロープ17)と、ワイヤロープ(11・17)の繰り入れ及び繰り出しによって昇降するフック(メインフック13・サブフック19)と、を具備している。そして、被写体をフック(13・19)又はフック(13・19)に吊り下げられた荷物Wとして、被写体をフック(13・19)とする場合、カメラ22が撮影した画像におけるフック(13・19)を追従し、フック(13・19)を含んだ箇所を表示装置27に表示し、被写体を荷物Wとする場合、カメラ22が撮影した画像における荷物Wを追従し、荷物Wを含んだ箇所を表示装置27に表示する。かかるクレーン1によれば、フック(13・19)又は荷物Wを含んだ箇所が切り出されて表示されるため、フック(13・19)とフック(13・19)の周囲の状況、又は荷物Wと荷物Wの周囲の状況を確認できる。なお、被写体を荷物Wとする場合、制御装置28は、画像認識等により荷物Wの位置を把握している。
加えて、本クレーン1においては、カメラ22が撮影した画像から複数箇所を切り出して表示装置27に拡大して表示するとしてもよい(図5参照)。つまり、被写体(例えばサブフック19)を含む箇所に加え、作業者30を含む箇所や障害物を含む箇所を切り出して表示装置27に拡大して表示するとしてもよい。なお、このような表示態様を実現するには、画像認識等によって作業者30の存在や障害物の存在を把握する必要がある。
更に加えて、本クレーン1が遠隔操作される場合にあっては、遠隔操作の操作方向と操作対象の移動方向を一致させて表示するのが好ましい。つまり、操作具を右方へ操作した場合は、画像上のメインフック13或いはサブフック19が同じく右方へ移動するように表示するのが好ましい。同様に、操作具を左方へ操作した場合は、画像上のメインフック13或いはサブフック19が同じく左方へ移動するように表示するのが好ましい。
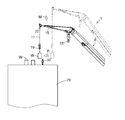
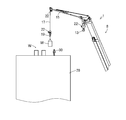
最後に、カメラ22がジブ15の先端部分に取り付けられた場合についても説明する。ここでも、建築物29の屋上に荷物Wを運搬している状況を想定して説明する(図6参照)。
図7Aは、カメラ22が撮影した画像を示している。図7Bは、図7Aにおけるサブフック19を含む箇所を切り出して拡大した画像を示している。このように、制御装置28は、カメラ22が撮影した画像から、ジブ15の先端部分の鉛直方向にあるサブフック19を含んだ箇所を切り出して表示装置27に拡大して表示することができる。このため、オペレータは、サブフック19とサブフック19の周囲の状況を確認できる。ひいては、サブフック19に吊り下げられた荷物Wと荷物Wの周囲の状況を確認できる。
加えて、カメラ22が撮影した画像からブーム8及びジブ15を含んだ箇所を切り出して表示装置27に表示するとしてもよい(図8参照)。画像にブーム8及びジブ15を含めることにより、これらと建築物29の衝突を監視できるからである。
次に、第二実施形態に係るクレーン1について説明する。以下においては、第一実施形態に係るクレーン1に対して相違する部分を中心に説明する。ジブ15は、ブーム8を構成する一部分であるものとする。
まず、図9を用いて、カメラシステム21について説明する。
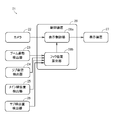
カメラシステム21は、モード切替スイッチ31とズーム調節スイッチ32を備えている。また、制御装置28は、ズーム制御部28cを有している。
モード切替スイッチ31は、カメラ22の動作態様を切り替えるものである。ズーム調節スイッチ32は、カメラ22のズーム倍率を調節するものである。そして、ズーム制御部28cは、カメラ22のズーム倍率を制御するものである。表示制御部28aは、カメラ22が撮影した画像から所定の箇所を切り出して、調節又は制御されたズーム倍率で切り出した画像が表示装置27に表示されるように、切り出した画像を拡大又は縮小する。ズーム制御部28cは、モード切替スイッチ31、ズーム調節スイッチ32、表示制御部28a、フック位置算出部28bに接続されている。
次に、図10を用いて、モード切替スイッチ31が「自動モード」を選択している場合について説明する。なお、被写体をサブフック19として説明するが、被写体をメインフック13としても成り立つことは自明である。また、カメラが1台として説明するが、カメラが複数台としても、複数台のカメラのうちいずれかのカメラで被写体を撮影し、被写体が撮影された画像を用いることにより、成り立つことも自明である。
ステップS11において、制御装置28は、モード切替スイッチ31が「自動モード」を選択しているか否かを判断する。「自動モード」であると判断した場合は、ステップS12へ移行する。「自動モード」でないと判断した場合は、このまま待機させる。
ステップS12において、制御装置28は、ブーム8の姿勢の変化及びジブ15の姿勢の変化を把握する。つまり、制御装置28は、ブーム8の起伏角度G(図1参照)や伸縮長さH(図1参照)、ジブ15の起伏角度I(図1参照)や伸縮長さJ(図1参照)の変化を把握する。同時に、制御装置28は、サブワイヤロープ17の繰り出し量の変化も把握する。
ステップS13において、制御装置28は、ブーム8の姿勢の変化及びジブ15の姿勢の変化及びサブワイヤロープ17の繰り出し量の変化に基づいて、サブフック19に対してカメラ22の位置が下がったか否かを判断する。カメラ22の位置が下がったと判断した場合は、ステップS14に移行する。カメラ22の位置が下がっていないと判断した場合は、ステップS15に移行する。なお、カメラ22の位置が下がると、カメラ22からサブフック19までの距離が近づくこととなる(図11における矢印M参照)。
ステップS14において、制御装置28は、画像におけるサブフック19の大きさが変わらないようにカメラ22のズーム倍率を低くする。カメラ22からサブフック19までの距離が近づくと、サブフック19が大きく映ってしまうからである。図12Aは、カメラ22の位置が下がる前の画像からサブフック19を含む箇所を切り出して、低くする前のズーム倍率で拡大した画像を示している。図12Bは、カメラ22の位置が下がった後の画像からサブフック19を含む箇所を切り出して、低くした後のズーム倍率で拡大した画像を示している。このように、カメラ22からサブフック19までの距離が近づいた場合であっても、画像におけるサブフック19の大きさがあまり変わらないことがわかる。この点、サブフック19の大きさを一定にすることも可能である。こうすることで、サブフック19を水平に移動している状況において(図11における矢印K参照)、サブフック19が意図せずに拡大して表示されることがなくなる。従って、オペレータがサブフック19を水平に移動している際の感覚をつかみやすい。
ステップS15において、制御装置28は、ブーム8の姿勢の変化及びジブ15の姿勢の変化及びサブワイヤロープ17の繰り出し量の変化に基づいて、サブフック19に対してカメラ22の位置が上がったか否かを判断する。カメラ22の位置が上がったと判断した場合は、ステップS16に移行する。カメラ22の位置が上がっていないと判断した場合は、かかる制御態様を終了する。なお、カメラ22の位置が上がると、カメラ22からサブフック19までの距離が遠ざかることとなる(図13における矢印N参照)。
ステップS16において、制御装置28は、画像におけるサブフック19の大きさが変わらないようにカメラ22のズーム倍率を高くする。カメラ22からサブフック19までの距離が遠ざかると、サブフック19が小さく映ってしまうからである。図14Aは、カメラ22の位置が上がる前の画像からサブフック19を含む箇所を切り出して、高くする前のズーム倍率で拡大した画像を示している。図14Bは、カメラ22の位置が上がった後の画像からサブフック19を含む箇所を切り出して、高くした後のズーム倍率で拡大した画像を示している。このように、カメラ22からサブフック19までの距離が遠ざかった場合であっても、画像におけるサブフック19の大きさがあまり変わらないことがわかる。この点、サブフック19の大きさを一定にすることも可能である。こうすることで、サブフック19を水平に移動している状況において(図13における矢印L参照)、サブフック19が意図せずに縮小して表示されることがなくなる。従って、オペレータがサブフック19を水平に運搬している際の感覚をつかみやすい。
次に、図15を用いて、モード切替スイッチ31が「手動モード」を選択している場合について説明する。なお、被写体をサブフック19として説明するが、被写体をメインフック13としても成り立つことは自明である。
ステップS21において、制御装置28は、モード切替スイッチ31が「手動モード」を選択しているか否かを判断する。「手動モード」であると判断した場合は、ステップS22へ移行する。「手動モード」でないと判断した場合は、このまま待機させる。
ステップS22において、制御装置28は、ズーム調節スイッチ32が一方側(ズーム倍率を低くする方向)へ操作されたか否かを判断する。ズーム調節スイッチ32が一方側へ操作されたと判断した場合は、ステップS23に移行する。ズーム調節スイッチ32が一方側へ操作されていないと判断した場合は、ステップS24に移行する。
ステップS23において、制御装置28は、画像におけるサブフック19が小さくなるようにカメラ22のズーム倍率を低くする。図16Aは、ズーム倍率を低くする前の画像からサブフック19を含む箇所を切り出して、低くする前のズーム倍率で拡大した画像を示している。図16Bは、ズーム倍率を低くした後の画像からサブフック19を含む箇所を切り出して、低くした後のズーム倍率で拡大した画像を示している。このように、オペレータがズーム倍率を低くすると、画像におけるサブフック19が小さくなることがわかる。換言すると、視野が広がることがわかる。
ステップS24において、制御装置28は、ズーム調節スイッチ32が他方側(ズーム倍率を高くする方向)へ操作されたか否かを判断する。ズーム調節スイッチ32が他方側へ操作されたと判断した場合は、ステップS25に移行する。ズーム調節スイッチ32が他方側へ操作されていないと判断した場合は、かかる制御態様を終了する。
ステップS25において、制御装置28は、画像におけるサブフック19が大きくなるようにカメラ22のズーム倍率を高くする。図17Aは、ズーム倍率を高くする前の画像からサブフック19を含む箇所を切り出して、高くする前のズーム倍率で拡大した画像を示している。図17Bは、ズーム倍率を高くした後の画像からサブフック19を含む箇所を切り出して、高くした後のズーム倍率で拡大した画像を示している。このように、オペレータがズーム倍率を高くすると、画像におけるサブフック19が大きくなることがわかる。換言すると、視野が狭まることがわかる。
このように、本クレーン1は、カメラ22のズーム倍率を変更し、被写体(例えばサブフック19)の大きさを変更して表示装置27に表示する。かかるクレーン1によれば、被写体(19)の大きさをオペレータが見やすい大きさに変更して表示装置27に表示できるため、被写体(19)と被写体(19)の周囲の状況が分かりやすくなる。
更に、本クレーン1は、カメラ22と、カメラ22が撮影した画像を表示する表示装置27と、カメラ22及び表示装置27に接続されて情報の処理を行う制御装置28と、を具備している。そして、制御装置28が、カメラ22から被写体(例えばサブフック19)までの距離が近づく場合にカメラ22のズーム倍率を低くし、カメラ22から被写体(19)までの距離が遠ざかる場合にカメラ22のズーム倍率を高くして表示装置27に表示する。かかるクレーン1によれば、画像における被写体(19)の大きさがあまり変わらないので、被写体(19)と被写体(19)の周囲の状況が分かりやすくなる。従って、安全性の向上と作業効率の向上を実現できる。
具体的に説明すると、本クレーン1は、ブーム8から垂下するワイヤロープ(メインワイヤロープ11・サブワイヤロープ17)と、ワイヤロープ(11・17)の繰り入れ及び繰り出しによって昇降するフック(メインフック13・サブフック19)と、を具備している。そして、カメラ22からフック(13・19)までの距離に関わらず、フック(13・19)の大きさが一定となるように表示装置27に表示する。又は、カメラ22から荷物Wまでの距離に関わらず、荷物Wの大きさが一定となるように表示装置27に表示する。かかるクレーン1によれば、画像におけるフック(13・19)又は荷物Wの大きさが一定となるので、フック(13・19)とフック(13・19)の周囲の状況、又は荷物Wと荷物Wの周囲の状況が分かりやすくなる。なお、荷物Wの大きさが一定になるように表示する場合、制御装置28は、画像認識等により荷物Wの位置を把握している。
加えて、本クレーン1においては、モード切替スイッチ31を具備している。モード切替スイッチ31は、少なくとも「自動モード」と「手動モード」を選択できる。こうすることで、オペレータは、画像の表示態様を任意に変更することができる。
更に加えて、本クレーン1においては、ズーム調節スイッチ32を具備している。ズーム調節スイッチ32は、モード切替スイッチ31が「手動モード」を選択しているときにズーム倍率を調節できる。こうすることで、オペレータは、画像における被写体(例えばサブフック19)の大きさを任意に変更することができる。
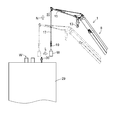
次に、第三実施形態に係るクレーン1について説明する。以下においては、第一実施形態に係るクレーン1に対して相違する部分を中心に説明する。ジブ15は、ブーム8を構成する一部分であるものとする。
本実施形態において、カメラ22は、ジブ15の先端部分に取り付けられている。ここで、かかるカメラ22を第一のカメラ22とした場合、カメラシステム21は、第二のカメラ22と第三のカメラ22を備えている。また、制御装置28は、移動方向算出部28dを有している。
第二のカメラ22は、メインフック13のフックブロックに取り付けられている。第三のカメラ22は、サブフック19のフックブロックに取り付けられている。そして、移動方向算出部28dは、メインフック13及びサブフック19の移動方向(図20A及び図20B、図21A及び図21Bにおける矢印P参照)を算出するものである。移動方向算出部28dは、ブーム姿勢検出器23、ジブ姿勢検出器24、メイン繰出量検出器25、サブ繰出量検出器26、表示制御部28aに接続されている。
次に、図19から図21を用いて、画像の表示態様について説明する。ここでも、建築物29の屋上に荷物Wを運搬している状況を想定して説明する。なお、本願においては、被写体をサブフック19として説明するが、被写体をメインフック13としても成り立つことは自明である。また、第一のカメラ22、第二のカメラ22、第三のカメラ22がそれぞれ1台として説明するが、各カメラが複数台としても、複数台のカメラのうちいずれかのカメラで被写体を撮影し、被写体が撮影された画像を用いることにより、成り立つことも自明である。
図20Aは、第一のカメラ22が撮影した画像からサブフック19を中心に円形に切り出した画像を示している。図20Bは、図20Aにおけるサブフック19の移動方向を含む一部領域を切り出して拡大した画像を示している。このように、制御装置28は、第一のカメラ22が撮影した画像からサブフック19の移動方向を含む一部領域を切り出して表示装置27に拡大して表示することができる。このため、オペレータは、ブーム視点(ブーム8から見下ろした視点)の画像から、サブフック19の移動方向の状況を確認できる。
図21Aは、第三のカメラ22が撮影した画像を示している。図21Bは、図21Aにおけるサブフック19の移動方向を含む一部領域を切り出して拡大した画像を示している。このように、制御装置28は、第三のカメラ22が撮影した画像からサブフック19の移動方向を含む一部領域を切り出して表示装置27に拡大して表示することができる。このため、オペレータは、フック視点(サブフック19から見渡した視点)の画像から、サブフック19の移動方向の状況を確認できる。なお、第一のカメラ22が撮影した画像からサブフック19を中心に円形に切り出した画像を併せて表示してもよい(図21B参照)。
このように、本クレーン1は、カメラ22と、カメラ22が撮影した画像を表示する表示装置27と、カメラ22及び表示装置27に接続されて情報の処理を行う制御装置28と、を具備している。そして、制御装置28が、フック(メインフック13・サブフック19)の移動方向を把握し、カメラ22が撮影した画像からフック(13・19)の移動方向を含む一部領域を切り出して表示装置27に表示する。かかるクレーン1によれば、フック(13・19)の移動方向を含む一部領域が表示されるため、フック(13・19)の移動方向の状況を確認できる。従って、安全性の向上と作業効率の向上を実現できる。
具体的に説明すると、本クレーン1は、ブーム8又はフック(メインフック13・サブフック19)にカメラ22が取り付けられ、カメラ22が撮影した画像からフック(13・19)の移動方向を含む一部領域を切り出して表示装置27に表示する。かかるクレーン1によれば、ブーム視点(ブーム8から見下ろした視点)又はフック視点(メインフック13又はサブフック19から見渡した視点)の画像からフック(13・19)の移動方向の状況を確認できる。
最後に、ブーム8の先端部分にカメラ22を取り付けた場合、カメラ22は、クレーン1が走行姿勢であるときの道路状況を撮影する用途に利用できる(図22参照)。このため、オペレータは、カメラ22が撮影した画像を見て安全性の確認をすることができる。なお、フートピン33に1台ずつカメラを取り付けた場合は、更に広い範囲の道路状況を撮影できる。このとき、オペレータは、更に広い範囲の道路状況が撮影された画像を見て安全性の確認をすることができる。
本発明は、クレーンに利用可能である。詳しくは、安全性の向上と作業効率の向上を実現させたクレーンに利用可能である。
1 クレーン
8 ブーム
11 メインワイヤロープ(ワイヤロープ)
13 メインフック(フック)
17 サブワイヤロープ(ワイヤロープ)
19 サブフック(フック)
22 カメラ
27 表示装置
28 制御装置
W 荷物
8 ブーム
11 メインワイヤロープ(ワイヤロープ)
13 メインフック(フック)
17 サブワイヤロープ(ワイヤロープ)
19 サブフック(フック)
22 カメラ
27 表示装置
28 制御装置
W 荷物
Claims (6)
- ブームを備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記カメラが撮影した画像における被写体を追従し、当該被写体を含んだ箇所を切り出して前記表示装置に表示する、ことを特徴とするクレーン。 - 前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を具備し、
前記被写体を前記フック又は前記フックに吊り下げられた荷物として、
前記被写体を前記フックとする場合、
前記カメラが撮影した画像における前記フックを追従し、当該フックを含んだ箇所を前記表示装置に表示し、
前記被写体を前記荷物とする場合、
前記カメラが撮影した画像における前記荷物を追従し、当該荷物を含んだ箇所を前記表示装置に表示する、ことを特徴とする請求項1に記載のクレーン。 - 前記カメラのズーム倍率を変更し、前記被写体の大きさを変更して前記表示装置に表示する、ことを特徴とする請求項1又は請求項2に記載のクレーン。
- 前記カメラから前記被写体までの距離が近づく場合に前記カメラのズーム倍率を低くし、前記カメラから前記被写体までの距離が遠ざかる場合に前記カメラのズーム倍率を高くして前記表示装置に表示する、ことを特徴とする請求項1から請求項3までのいずれか一項に記載のクレーン。
- ブームと、
前記ブームから垂下するワイヤロープと、
前記ワイヤロープの繰り入れ及び繰り出しによって昇降するフックと、を備えたクレーンにおいて、
カメラと、
前記カメラが撮影した画像を表示する表示装置と、
前記カメラ及び前記表示装置に接続されて情報の処理を行う制御装置と、を具備し、
前記制御装置が、
前記フックの移動方向を把握し、前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ことを特徴とするクレーン。 - 前記ブーム又は前記フックに前記カメラが取り付けられ、
前記カメラが撮影した画像から前記フックの移動方向を含む一部領域を切り出して前記表示装置に表示する、ことを特徴とする請求項5に記載のクレーン。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-043253 | 2018-03-09 | ||
| JP2018043253A JP2019156533A (ja) | 2018-03-09 | 2018-03-09 | クレーン |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019172413A1 true WO2019172413A1 (ja) | 2019-09-12 |
Family
ID=67847108
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/009292 WO2019172413A1 (ja) | 2018-03-09 | 2019-03-08 | クレーン |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2019156533A (ja) |
| WO (1) | WO2019172413A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022144601A (ja) | 2021-03-19 | 2022-10-03 | コベルコ建機株式会社 | 遠隔操作支援サーバおよび遠隔操作支援システム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07309577A (ja) * | 1994-05-17 | 1995-11-28 | Ohbayashi Corp | クレーン用テレビモニタ装置 |
| JPH0853290A (ja) * | 1994-08-10 | 1996-02-27 | Tadano Ltd | クレーンの吊荷監視装置 |
| JP2001002369A (ja) * | 1999-06-25 | 2001-01-09 | Kobelco Contstruction Machinery Ltd | クレーンの吊荷監視装置 |
| JP2013142037A (ja) * | 2012-01-12 | 2013-07-22 | Tadano Ltd | 作業車用の吊荷監視カメラ装置 |
| JP2013159480A (ja) * | 2012-02-08 | 2013-08-19 | Sumitomo Heavy Ind Ltd | 視覚補助装置 |
| JP2013193825A (ja) * | 2012-03-19 | 2013-09-30 | Tadano Ltd | クレーン作業監視装置 |
| CN103359642A (zh) * | 2013-07-29 | 2013-10-23 | 中联重科股份有限公司 | 一种塔机作业监控系统、方法和塔机 |
| WO2017141320A1 (ja) * | 2016-02-15 | 2017-08-24 | 株式会社大島造船所 | クレーンの操作を支援するための判定装置、判定システム、プログラムおよび記録媒体 |
-
2018
- 2018-03-09 JP JP2018043253A patent/JP2019156533A/ja active Pending
-
2019
- 2019-03-08 WO PCT/JP2019/009292 patent/WO2019172413A1/ja active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07309577A (ja) * | 1994-05-17 | 1995-11-28 | Ohbayashi Corp | クレーン用テレビモニタ装置 |
| JPH0853290A (ja) * | 1994-08-10 | 1996-02-27 | Tadano Ltd | クレーンの吊荷監視装置 |
| JP2001002369A (ja) * | 1999-06-25 | 2001-01-09 | Kobelco Contstruction Machinery Ltd | クレーンの吊荷監視装置 |
| JP2013142037A (ja) * | 2012-01-12 | 2013-07-22 | Tadano Ltd | 作業車用の吊荷監視カメラ装置 |
| JP2013159480A (ja) * | 2012-02-08 | 2013-08-19 | Sumitomo Heavy Ind Ltd | 視覚補助装置 |
| JP2013193825A (ja) * | 2012-03-19 | 2013-09-30 | Tadano Ltd | クレーン作業監視装置 |
| CN103359642A (zh) * | 2013-07-29 | 2013-10-23 | 中联重科股份有限公司 | 一种塔机作业监控系统、方法和塔机 |
| WO2017141320A1 (ja) * | 2016-02-15 | 2017-08-24 | 株式会社大島造船所 | クレーンの操作を支援するための判定装置、判定システム、プログラムおよび記録媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019156533A (ja) | 2019-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5876679B2 (ja) | 性能線表示装置 | |
| JP5462008B2 (ja) | 画像表示システム | |
| JP2013142037A (ja) | 作業車用の吊荷監視カメラ装置 | |
| JP6589468B2 (ja) | 移動式クレーンの周囲表示装置 | |
| JP7106929B2 (ja) | 作業車両 | |
| WO2019172413A1 (ja) | クレーン | |
| US11905145B2 (en) | Remote control terminal and work vehicle | |
| JP3402771B2 (ja) | クレーンの吊荷監視装置 | |
| EP3831766B1 (en) | Crane | |
| WO2019163875A1 (ja) | カメラ装置、吊荷監視システム、及び、作業機 | |
| JP6772765B2 (ja) | 画像表示装置 | |
| CN111819147B (zh) | 作业车辆 | |
| JP2019142679A (ja) | 吊荷監視装置 | |
| US20100193458A1 (en) | Controller for an Adjustable Jib Extension of a Mobile Crane | |
| JP2018087059A (ja) | 作業車両 | |
| CN111819152B (zh) | 起重机以及信息显示方法 | |
| JP7006442B2 (ja) | クレーン | |
| JP3226637U (ja) | 遠隔作業支援システム | |
| JP2018042205A (ja) | 画像表示システム | |
| US20220315391A1 (en) | Image system and work vehicle provided with image system | |
| JPWO2019163875A1 (ja) | カメラ装置、吊荷監視システム、及び、作業機 | |
| JP2019014584A (ja) | クレーン車 | |
| US11981546B2 (en) | Work vehicle having an operation terminal that provides a sense of direction for an operator | |
| JP2019156532A (ja) | 作業車両及び作業車両における情報表示方法 | |
| JP7238531B2 (ja) | クレーン |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19763922 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19763922 Country of ref document: EP Kind code of ref document: A1 |