WO2019004245A1 - 表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 - Google Patents
表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 Download PDFInfo
- Publication number
- WO2019004245A1 WO2019004245A1 PCT/JP2018/024286 JP2018024286W WO2019004245A1 WO 2019004245 A1 WO2019004245 A1 WO 2019004245A1 JP 2018024286 W JP2018024286 W JP 2018024286W WO 2019004245 A1 WO2019004245 A1 WO 2019004245A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- virtual image
- display system
- information
- image
- moving
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 31
- 238000001514 detection method Methods 0.000 claims description 15
- 239000003550 marker Substances 0.000 description 102
- 230000008901 benefit Effects 0.000 description 33
- 230000003287 optical effect Effects 0.000 description 28
- 238000010586 diagram Methods 0.000 description 22
- 230000008859 change Effects 0.000 description 18
- 238000012545 processing Methods 0.000 description 10
- 230000000007 visual effect Effects 0.000 description 9
- 102100034112 Alkyldihydroxyacetonephosphate synthase, peroxisomal Human genes 0.000 description 8
- 101000799143 Homo sapiens Alkyldihydroxyacetonephosphate synthase, peroxisomal Proteins 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 8
- 238000000848 angular dependent Auger electron spectroscopy Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 230000001678 irradiating effect Effects 0.000 description 6
- 238000010276 construction Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 239000003973 paint Substances 0.000 description 3
- 240000004050 Pentaglottis sempervirens Species 0.000 description 2
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 210000004556 brain Anatomy 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 206010021403 Illusion Diseases 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/365—Guidance using head up displays or projectors, e.g. virtual vehicles or arrows projected on the windscreen or on the road itself
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/0969—Systems involving transmission of navigation instructions to the vehicle having a display in the form of a map
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0179—Display position adjusting means not related to the information to be displayed
- G02B2027/0185—Displaying image at variable distance
Definitions
- the present disclosure generally relates to a display system, an information presentation system including the display system, a control method of the display system, a program, and a mobile including the display system. More specifically, the present disclosure relates to a display system that projects a virtual image in a target space, an information presentation system that includes the display system, a control method of the display system, a program, and a mobile that includes the display system.
- a display device for vehicles which reflects a display image projected from a display body by a reflector on the inner surface of a windshield (windshield) and displays it remotely as a virtual image. It is disclosed.
- the vehicle display device described in Patent Document 1 includes route guidance information from a navigation device (for example, a road map near the current position, display of a traveling direction), a guidance indicator (for example, arrow indicators such as straight ahead, left turn, right turn, etc.) Is displayed as a virtual image.
- the present disclosure aims to provide a display system that facilitates grasping the condition of a road surface on which a mobile unit is moving, an information presentation system including the display system, a control method of the display system, a program, and the mobile unit including the display system. I assume.
- a display system is a display system that causes a target person to visually recognize a virtual image as projected on a target space in front of a moving object by projecting an image, And a unit.
- the projection unit projects the image.
- the control unit controls display of the image.
- the control unit controls the display of the image so as to display an image having a width in a traveling direction of the moving body and at least an attribute information of a road surface on which the moving body is moving.
- An information presentation system includes the display system described above and a detection system.
- the detection system detects an object around the moving body.
- a control method of a display system is a control method of a display system including a projection unit and a control unit.
- the projection unit projects the image.
- the control unit controls display of the image.
- the control method of the display system displays the image of a content having a width in the traveling direction of the moving body and indicating attribute information of the road surface on which the moving body is moving.
- a program according to an aspect of the present disclosure is a program for causing a computer system to execute the control method of the display system described above.
- a mobile includes the display system described above and a reflective member.
- the reflecting member is light transmissive and reflects light emitted from the projection unit.
- the present disclosure has the advantage that it is easy to grasp the condition of the road surface on which the moving object is moving.
- FIG. 1 is a conceptual view of a vehicle provided with a display system according to an embodiment of the present disclosure.
- FIG. 2 is a conceptual view showing the configuration of the display system and the information presentation system of the same.
- FIG. 3 is a conceptual view showing the field of view of the user when the display system described above is used.
- FIG. 4 is a conceptual view showing the field of view of the user in the case of projecting the virtual image of the first example of content using the above display system.
- FIG. 5 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image (including the recommended route) of the first example of content using the display system of the above.
- FIG. 6 is a flowchart showing the operation of the display system in the case of projecting the virtual image of the first content example.
- FIG. 7A is a bird's-eye view showing the condition of the road surface in the case of projecting the virtual image of the second content example using the display system of the same as above.
- FIG. 7B is a bird's-eye view showing the condition of the road surface in the case of projecting the virtual image of the second content example using the display system of the same as above.
- FIG. 8 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the second example of content using the display system described above.
- FIG. 9 is a conceptual diagram showing the field of view of the user when the virtual image (including the auxiliary marker) of the second example of the present invention is projected using the display system of the above.
- FIG. 10 is a flowchart showing the operation of the display system in the case of projecting the virtual image of the second content example.
- FIG. 11A is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the third example of content using the display system described above.
- FIG. 11B is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the third example of content using the display system described above.
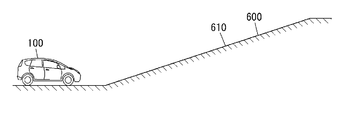
- FIG. 12A is a conceptual diagram showing a situation in which a vehicle is located in front of an ascending slope.
- FIG. 12B is a conceptual diagram showing the user's visual field in the case where the virtual image of the third example of the present invention is projected using the display system described above in the situation where the vehicle is located in front of the upward slope.
- FIG. 11A is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the third example of content using the display system described above.
- FIG. 12B is a conceptual diagram showing the user
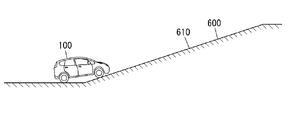
- FIG. 13A is a conceptual diagram showing a situation in which the vehicle is located at the start point of the uphill slope.
- FIG. 13B is a conceptual diagram showing the user's visual field in the case where the virtual image of the third example of the present invention is projected using the display system described above in the situation where the vehicle is located at the slope start point of the upward slope.
- FIG. 14A is a conceptual diagram showing a situation where a car is positioned on the way uphill.
- FIG. 14B is a conceptual diagram showing a user's visual field in the case where the virtual image of the third content example is projected using the display system described above in the situation where the vehicle is located on the way up.
- FIG. 15A is a conceptual diagram showing a field of view of the user in the case of projecting a virtual image (including an auxiliary marker) of the third example of content using the display system of the above.
- FIG. 15B is a conceptual diagram showing the field of view of the user in the case of projecting the partially transmitted virtual image of the third example content using the display system of the above.
- FIG. 16 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image (sign) of the third example of content using the display system of the above.
- FIG. 17A is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image (name of a road) of the fourth example of content using the display system described above.
- FIG. 17B is a conceptual diagram showing the field of view of the user in the case of projecting a virtual image (name of a road) of the fourth example of content using the display system described above.
- FIG. 18 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image (the direction of the road) of the fourth example of content using the display system of the above.
- FIG. 19 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the fifth example of content using the display system described above.
- FIG. 20 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the sixth content example using the display system of the above.
- FIG. 21 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the seventh example of content using the display system of the above.
- FIG. 22 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the eighth example content using the display system of the above.
- FIG. 23 is a conceptual diagram showing the field of view of the user in the case of projecting the virtual image of the ninth example of content using the display system described above.
- the driver of the vehicle can grasp the route to the destination, but has a problem that it is difficult to grasp the condition of the road surface on which the vehicle is moving.
- the display system 10 is, for example, a head-up display (HUD) used in an automobile 100 as shown in FIGS. 1 to 3.
- the display system 10 is installed in a cabin of the automobile 100 so as to project an image from below onto the windshield 101 of the automobile 100.
- the display system 10 is disposed in the dashboard 102 below the windshield 101.
- the automobile 100 (moving body) includes the display system 10 and the reflection member (here, the windshield 101).
- the reflective member is light transmissive and reflects light emitted from a projection unit 40 (described later) included in the display system 10.
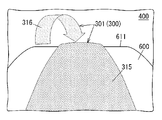
- the user 200 visually recognizes, through the windshield 101, the virtual image 300 projected on the target space 400 set in front of the vehicle 100 (outside the vehicle).
- virtual image means an image that is formed so that an object is actually present by the diverging rays when light emitted from the display system 10 diverges at a reflecting object such as the windshield 101 or the like. Therefore, the user 200 can see the virtual image 300 projected by the display system 10 superimposed on the real space extending in front of the automobile 100. Therefore, according to the display system 10, various driving support information such as, for example, vehicle speed information, navigation information, pedestrian information, forward vehicle information, lane deviation information, and vehicle condition information are displayed as a virtual image 300, It can be made visible to 200. As a result, the user 200 can visually acquire the driving support information with only a slight line of sight movement from the state where the line of sight is directed to the front of the windshield 101.
- the display system 10 is a part of the information presentation system 1000 as shown in FIG. 2 and acquires from the detection system 7 ADAS information (described later) which is a part of the driving support information. .
- the detection system 7 is configured to detect an object around the vehicle 100.
- the information presentation system 1000 includes the display system 10 and the detection system 7.
- the virtual image 300 formed in the target space 400 includes at least two types of virtual images of the first virtual image 301 and the second virtual image 302, as shown in FIGS. 1 and 3. .
- the “first virtual image” is a virtual image 300 (301) formed on the first virtual surface 501.
- the “first virtual plane” is a virtual plane in which the inclination angle ⁇ with respect to the optical axis 500 of the display system 10 is smaller than a predetermined value ⁇ ( ⁇ ⁇ ).
- the “second virtual image” mentioned here is a virtual image 300 (302) formed on the second virtual surface 502.
- the “second virtual plane” is a virtual plane in which the tilt angle ⁇ with respect to the optical axis 500 of the display system 10 is larger than a predetermined value ⁇ ( ⁇ > ⁇ ).
- the “optical axis” here is an optical axis of an optical system of a projection optical system 4 (see FIG. 2) described later, which means an axis passing through the center of the target space 400 and along the optical path of the virtual image 300.
- the predetermined value ⁇ is 45 degrees as an example, and the inclination angle ⁇ is 90 degrees as an example.
- the virtual image 300 formed in the target space 400 includes the third virtual image 303 (see FIG. 3) in addition to the first virtual image 301 and the second virtual image 302.
- the “third virtual image” is a virtual image 300 (303) formed on the second virtual surface 502 in which the tilt angle ⁇ with respect to the optical axis 500 is larger than the predetermined value ⁇ .
- the virtual image formed by the light transmitted through the movable screen 1a is the second virtual image 302 and is transmitted by the light transmitted through the fixed screen 1b.
- the virtual image formed is the third virtual image 303.
- the optical axis 500 is along the road surface 600 in front of the vehicle 100 in the target space 400 in front of the vehicle 100.
- the first virtual image 301 is formed on a first virtual surface 501 substantially parallel to the road surface 600
- the second virtual image 302 and the third virtual image 303 are on a second virtual surface 502 substantially perpendicular to the road surface 600. It is formed.
- the road surface 600 is a horizontal plane
- the first virtual image 301 is displayed along the horizontal plane
- the second virtual image 302 and the third virtual image 303 are displayed along the vertical plane.
- the first virtual image 301 is different in the distance (also referred to as “visual distance”) from the farthest portion to the farthest portion from the eye (eye point) of the user 200. That is, the first virtual image 301 is a virtual image having a width at the depth in the traveling direction of the mobile object (the automobile 100). In other words, the first virtual image 301 is a virtual image whose depth is different in parallel with the traveling direction of the moving object.
- FIG. 3 is a conceptual view showing the field of view of the user 200.
- the display system 10 of the present embodiment can display the first virtual image 301, the second virtual image 302, and the third virtual image 303.
- the first virtual image 301 is viewed by the user 200 with a depth along the road surface 600.
- the second virtual image 302 and the third virtual image 303 are viewed upright on the road surface 600 at a constant distance from the user 200. Therefore, for the user 200, the first virtual image 301 appears on a plane substantially parallel to the road surface 600, and the second virtual image 302 and the third virtual image 303 are on a plane substantially perpendicular to the road surface 600. looks like.
- the content of the first virtual image 301 is, as an example, information indicating the traveling direction of the vehicle 100 as navigation information, and an arrow indicating right turn or left turn can be presented to the user 200 on the road surface 600 or the like.
- the content of the second virtual image 302 is, as an example, information indicating a distance to a preceding vehicle or a pedestrian, and it is possible to present the distance to the preceding vehicle (inter-vehicle distance) on the preceding vehicle to the user 200 .
- the contents of the third virtual image 303 are, as an example, the current time, vehicle speed information, and vehicle condition information, and for example, the user 200 is presented with information such as letters, numbers, symbols, or a fuel meter. Etc. are possible.
- the content of the virtual image 300 has a width in the traveling direction of the vehicle 100 and includes at least attribute information of the road surface 600 on which the vehicle 100 is traveling. Therefore, it is possible to show the user 200 the condition of the road surface 600 on which the automobile 100 is traveling, etc. by the virtual image 300.
- the “attribute information of the road surface 600” includes information on an object on the road surface 600 as well as information on the road surface 600 itself, such as the slope of the road surface 600 and the name of the road including the road surface 600, for example. .
- the object on the road surface 600 is, for example, another moving object (here, another vehicle) different from the car 100 moving on the road surface 600, an obstacle other than the other moving object on the road surface 600 (eg, a pedestrian , Construction site etc.). Details will be described later in “(4) Content of virtual image”.
- the display system 10 acquires a plurality of screens 1 a and 1 b, a drive unit 2, an irradiation unit 3, a projection optical system 4, and a control unit 5. And 6 are provided.
- the projection optical system 4 and the irradiation unit 3 constitute a projection unit 40 that projects the virtual image 300 (see FIG. 1) onto the target space 400 (see FIG. 1).
- the plurality of screens 1a and 1b include a stationary screen 1b and a movable screen 1a.
- the fixed screen 1 b is fixed at a fixed position with respect to a housing or the like of the display system 10.
- the movable screen 1 a is inclined at an angle ⁇ with respect to the reference surface 503.
- the movable screen 1a is configured to be movable in a moving direction X (direction shown by an arrow X1-X2 in FIG. 2) orthogonal to the reference surface 503.
- the "reference plane” referred to here is a virtual plane that defines the moving direction of the movable screen 1a, and is not an existing plane.
- the movable screen 1a is configured to be linearly movable in the moving direction X while maintaining the posture inclined by the angle ⁇ with respect to the reference surface 503.
- each of the plurality of screens 1a and 1b may be referred to as "screen 1".
- the screen 1 (each of the movable screen 1a and the fixed screen 1b) has translucency, and forms an image for forming a virtual image 300 (see FIG. 1) in the target space 400 (see FIG. 1). That is, on the screen 1, an image is drawn by the light from the irradiation unit 3, and the light passing through the screen 1 forms a virtual image 300 in the target space 400.
- the screen 1 is made of, for example, a plate-like member having a light diffusing property and formed in a rectangular shape. The screen 1 is disposed between the irradiation unit 3 and the projection optical system 4.
- the drive unit 2 moves the movable screen 1 a in the moving direction X.
- the drive unit 2 can move the movable screen 1 a in both the direction approaching the projection optical system 4 and the direction away from the projection optical system 4 along the moving direction X.
- the drive unit 2 is, for example, an electrically driven actuator such as a voice coil motor, and operates according to a first control signal from the control unit 5.
- the irradiation unit 3 is a scanning-type light irradiation unit, and emits light to the movable screen 1a or the fixed screen 1b.
- the irradiation unit 3 includes a light source 31 and a scanning unit 32. In the irradiation unit 3, each of the light source 31 and the scanning unit 32 operates according to the second control signal from the control unit 5.
- the light source 31 is formed of a laser module that outputs a laser beam.
- the light source 31 includes a red laser diode that outputs red (R) laser light, a green laser diode that outputs green (G) laser light, and a blue laser diode that outputs blue (B) laser light. Contains.
- the laser beams of three colors output from these three types of laser diodes are synthesized by, for example, a dichroic mirror, and enter the scanning unit 32.
- the scanning unit 32 scans the light from the light source 31 to emit light scanning the entire surface of the movable screen 1a or the fixed screen 1b onto the movable screen 1a or the fixed screen 1b.
- the scanning unit 32 performs a raster scan that scans light two-dimensionally on one surface of the movable screen 1a or the fixed screen 1b.
- the projection optical system 4 receives the light output from the irradiation unit 3 and transmitted through the screen 1 as incident light, and projects the virtual image 300 (see FIG. 1) onto the target space 400 (see FIG. 1) by the incident light.
- the projection optical system 4 is arranged in line with the screen 1 in the moving direction X of the movable screen 1 a.
- the projection optical system 4 has a magnifying lens 41, a first mirror 42, and a second mirror 43, as shown in FIG.
- the magnifying lens 41, the first mirror 42, and the second mirror 43 are disposed in this order on the path of light transmitted through the screen 1.
- the magnifying lens 41 is disposed on the side (first direction X1 side) opposite to the irradiation unit 3 in the moving direction X as viewed from the screen 1 so that light output along the moving direction X from the screen 1 is incident It is done.
- the magnifying lens 41 magnifies the image formed on the screen 1 by the light from the irradiating unit 3 and outputs the image to the first mirror 42.
- the first mirror 42 reflects the light from the magnifying lens 41 toward the second mirror 43.
- the second mirror 43 reflects the light from the first mirror 42 toward the windshield 101 (see FIG. 1).
- the projection optical system 4 projects the virtual image 300 on the target space 400 by enlarging the image formed on the screen 1 by the light from the irradiation unit 3 with the magnifying lens 41 and projecting it on the windshield 101.
- the optical axis of the magnifying lens 41 is the optical axis 500 of the projection optical system 4.
- the control unit 5 is configured of, for example, a microcomputer whose main configuration is a CPU (Central Processing Unit) and a memory.
- the control unit 5 is realized by a computer having a CPU and a memory, and the computer functions as the control unit 5 when the CPU executes a program stored in the memory.
- the program is pre-recorded in the memory of the control unit 5, but may be provided through a telecommunication line such as the Internet or in a recording medium such as a memory card.
- the control unit 5 controls display of the virtual image 300 projected on the target space 400 by controlling the drive unit 2 and the irradiation unit 3.
- the control unit 5 controls the drive unit 2 with the first control signal, and controls the irradiation unit 3 with the second control signal. Further, the control unit 5 is configured to synchronize the operation of the drive unit 2 and the operation of the irradiation unit 3. Furthermore, as shown in FIG. 2, the control unit 5 has functions as a drive control unit 51 and a display control unit 52.
- the drive control unit 51 controls the drive unit 2 to move the movable screen 1 a relative to the reference position.
- the “reference position” mentioned here is a position set at a specified position in the movement range of the movable screen 1 a.
- the drive control unit 51 moves the movable screen 1 a to project the first virtual image 301 and the second virtual image 302 to the target space 400 by the light transmitted through the movable screen 1 a, and the irradiation unit 3 moves the movable screen 1 a to the movable screen 1 a.
- the drive unit 2 is controlled in synchronization with the drawing.
- the display control unit 52 cooperates with the drive control unit 51 to display the virtual image 300 of the content based on the one or more pieces of information (also referred to as “moving object information”) acquired from the acquisition unit 6.
- the irradiation unit 3 is controlled.
- the virtual image 300 (here, the first virtual image 301) has a width in the traveling direction of the vehicle 100 (moving object), and includes at least content representing attribute information of the road surface 600 on which the vehicle 100 is moving. It is.
- the acquisition unit 6 includes information on the position of the automobile 100 (moving object) (also referred to as “position information”), information on objects around the automobile 100 (also referred to as “ADAS information”), and information on the state of the automobile 100 (“ “Vehicle information” (also referred to as “vehicle information”) is acquired. That is, the attribute information included in the content of the virtual image 300 is information based on one or more of the position information, the ADAS information, and the vehicle information.
- the ADAS information is information that can be detected by a camera that is a detection unit of an advanced driver assistance system (ADAS: Advanced Driver Assistance System), a sonar sensor, a radar, a LiDAR (Light Detection and Ranging), and the like.
- ADAS Advanced Driver Assistance System
- the acquisition unit 6 acquires ADAS information from the detection system 7 provided with the imaging device 71 and the laser radar 72.
- the imaging device 71 captures a space around the vehicle 100 including the target space 400.
- the laser radar 72 measures the distance from an object present in the space around the vehicle 100 to the vehicle 100, the nature of the object, and the like.
- ADAS information As a specific example of ADAS information, the distance from the moving object to the vehicle moving around the automobile 100, the relative coordinates of this vehicle with respect to the automobile 100, the inter-vehicle distance between a plurality of vehicles, the relative speed of these vehicles, etc. There is.
- objects in the vicinity of the vehicle 100 in the ADAS information include vehicles running or stopping around the vehicle 100, structures such as guard rails, pedestrians, small animals, and the like.
- the vehicle information is information that represents the local state of the vehicle 100 itself, and is information that can be detected by a sensor mounted on the vehicle 100.
- vehicle information include the moving speed of the automobile 100 (traveling speed), the acceleration applied to the automobile 100, the depression amount of the accelerator pedal (accelerator opening degree), the depression amount of the brake pedal, the steering angle, and the inclination of the vehicle. There is inclination of the seat in the vehicle and the like.
- the driver's pulse detected by the driver monitor, the expression, the line of sight, and the like are also included in the vehicle information.
- data specific to the automobile 100 such as vehicle width, vehicle height, total length, and eye point, is also included in the vehicle information.
- Position information is information based on the position of the automobile 100, and is information that can be detected using a positioning system such as GPS (Global Positioning System), such as road information at the position of the vehicle.
- GPS Global Positioning System
- Specific examples of the position information include the number of lanes of the road at the vehicle position, whether it is an intersection, whether it is a double road, whether it is one way, road width, presence of sidewalks, slope, curvature of curve, etc. .
- the control unit 5 controls the irradiating unit 3 to irradiate light from the irradiating unit 3 to the movable screen 1 a.
- light that scans one surface of the movable screen 1 a is emitted from the irradiation unit 3 to the movable screen 1 a.
- an image is formed (projected) on the movable screen 1a.
- the light from the irradiation unit 3 passes through the movable screen 1 a and is irradiated from the projection optical system 4 to the windshield 101.
- the image formed on the movable screen 1 a is projected onto the windshield 101 from the lower side of the windshield 101 in the cabin of the automobile 100.
- the windshield 101 When an image is projected from the projection optical system 4 to the windshield 101, the windshield 101 reflects the light from the projection optical system 4 toward the user 200 (driver) in the vehicle interior. Thereby, the image reflected by the windshield 101 is visually recognized by the user 200. As a result, the user 200 can visually recognize the virtual image 300 (the first virtual image 301 or the second virtual image 302) projected to the front (outside the vehicle) of the automobile 100 through the windshield 101.
- the control unit 5 causes the light to scan on one surface of the movable screen 1 a in a state in which the movable screen 1 a is fixed in the moving direction X, thereby being viewed by the user 200 with depth along the road surface 600.
- the first virtual image 301 is formed.
- the control unit 5 scans light on one surface of the movable screen 1a. Let As a result, a second virtual image 302 that is viewed upright on the road surface 600 at a certain distance from the user 200 is formed.
- control unit 5 controls the drive unit 2 to move the movable screen 1 a in the moving direction X in a period in which light is emitted from the irradiation unit 3 to the movable screen 1 a. From the eye (eye point) of the user 200 to the virtual image 300 when the movable screen 1a moves in the first direction X1 when the irradiation position of light from the irradiation unit 3 on one surface of the movable screen 1a, that is, the position of the bright spot is the same.
- the visual distance of is short.
- the visual distance to the virtual image 300 becomes long (far). That is, the viewing distance to the virtual image 300 changes with the position of the movable screen 1 a in the moving direction X.
- the control unit 5 moves the movable screen 1a in the X direction according to the visual distance, and fixes the movable screen 1a at the position after movement. Light is scanned on one surface of the movable screen 1a.
- the control unit 5 moves the movable screen 1a in the X direction according to the viewing distance. The control unit 5 scans light on one surface of the movable screen 1a while moving the movable screen 1a so that the distance in the X direction from the bright spot to the projection optical system 4 becomes constant based on the position after movement
- control unit 5 controls the irradiating unit 3 to irradiate light from the irradiating unit 3 to the fixed screen 1 b. At this time, light which scans one surface of the fixed screen 1 b is emitted from the irradiation unit 3 to the fixed screen 1 b.
- an image is formed (projected) on the fixed screen 1 b and the image is projected on the windshield 101.
- the user 200 can visually recognize the virtual image 300 (third virtual image 303) projected to the front (outside of the vehicle) of the automobile 100 through the windshield 101.
- the third virtual image 303 is formed of light projected onto the fixed screen 1b whose position is fixed, the third virtual image 303 is on the road surface 600 at a predetermined distance (for example, 2 to 3 m) from the user 200. It is viewed upright.
- the two virtual images 302 and the third virtual image 303 can all be projected.
- the movable screen 1a is irradiated with light to project the first virtual image 301, and then the fixed screen
- the third virtual image 303 is projected by emitting light to 1b.
- the fixed screen 1b is irradiated with light to project the third virtual image 303, and then the light is projected on the movable screen 1a To project the second virtual image 302.
- the first virtual image 301, the third virtual image 303, and the second virtual image 302 are projected on the target space 400 during one cycle in which the scanning unit 32 scans in the vertical direction. Since the scanning in the vertical direction in the irradiation unit 3 is performed at relatively high speed, the user 200 visually recognizes the first virtual image 301, the third virtual image 303, and the second virtual image 302 as being simultaneously displayed.
- the frequency of scanning in the vertical direction in the irradiation unit 3 is, for example, 60 Hz or more.
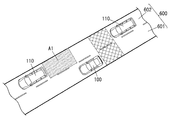
- the virtual image 300 includes a marker 310 as shown in FIG.
- a marker 310 is a first virtual image 301, and represents a predicted path of the automobile 100 (moving object).
- the “predicted route” is a route that is predicted to be traveled by the vehicle 100 when the user 200 maintains the current steering wheel operation.
- the marker 310 is shaped so as to avoid the other vehicle 110 in the specific area A1 (see the broken line in FIG. 4 and similarly in FIG. 5).
- the boundary with the other vehicle 110 in the specific area A1 is a relatively thick line.
- the specific area A1 is an area that is in the traveling direction of the automobile 100 and the predicted route overlaps with the other automobile 110.
- specific area A1 is a shape which avoids other motor vehicles 110 as mentioned above, and the border line with other motor vehicles 110 becomes a comparatively thick line, and motor vehicle 100 can not enter specific area A1. It shows that it is possible. That is, in the present embodiment, the attribute information of the virtual image 300 is information indicating whether or not the vehicle 100 can enter the specific area A1 in the traveling direction of the vehicle 100.
- the virtual image 300 is displayed, for example, when the road surface 600 satisfies the predetermined criteria.
- the predetermined standard is satisfied, for example, when the road surface 600 is a narrow section, a construction site exists, or the like, and a plurality of vehicles can not travel side by side.
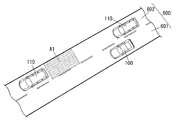
- the control unit 5 is a marker of the content representing a recommended route by which the vehicle 100 can avoid the specific area A1.
- 311 (virtual image 300) is displayed.
- the control unit 5 acquires one or more pieces of moving body information (for example, road information at the vehicle position, object information around the vehicle, etc.) from the acquisition unit 6 (step S101). Then, the control unit 5 constructs a pseudo space (virtual 3D space) imitating the target space 400 based on the acquired one or more pieces of moving body information (step S102).
- a pseudo space virtual 3D space
- step S103 determines whether the road surface 600 on which the automobile 100 is traveling satisfies the predetermined standard.
- step S103 determines whether the road surface 600 on which the automobile 100 is traveling satisfies the predetermined standard.
- step S103: No the control unit 5 does not perform the subsequent processing and executes step S101 again because the road surface 600 is not a narrow section.
- step S103: Yes the control unit 5 determines one or more pieces of mobile object information (for example, vehicle width, steering angle, direction information, etc.) acquired from the acquisition unit 6 , Draw a predicted path in the pseudo space (step S104).
- mobile object information for example, vehicle width, steering angle, direction information, etc.
- the control unit 5 determines whether an object is present on the predicted path (step S105). If an object (for example, another automobile 110) exists on the predicted path (step S105: Yes), the control unit 5 draws entry impossibility information in the pseudo space (step S106). The entry disallowed information is information representing that the vehicle 100 can not enter the specific area A1. Then, when there is a path that can avoid the object, the control unit 5 draws a recommended path in the pseudo space (step S107). After that, the control unit 5 controls the drive unit 2 and the irradiation unit 3 to project the content drawn in the pseudo space as the virtual image 300 on the target space 400 (step S108). Thereby, the marker 310 representing the predicted route and the marker 311 representing the recommended route are projected onto the road surface 600 in the target space 400.
- step S105 determines whether an object exists in the target space 400 (step S109).
- step S109 determines whether an object exists in the target space 400 (step S109: Yes).
- step S109 executes the step S108 after drawing the recommended route in the pseudo space (step S107).
- step S109 executes step S108 without drawing the recommended route in the pseudo space.
- step S109 The situation in which the process of step S109 is performed will be described.
- the predicted path changes.
- the predicted path substantially matches the recommended path, no object is present on the predicted path.
- the marker 311 continues to be projected to the target space 400.
- an object does not exist in the target space 400, for example, when the car 100 passes by the side of another car 110, the marker 311 is not projected to the target space 400.
- a virtual image 300 of content representing whether the vehicle 100 can enter the specific area A1 in the traveling direction of the vehicle 100 is projected onto the target space 400. Therefore, there is an advantage that it is easy for the user 200 to easily determine whether it is necessary to change the traveling direction of the vehicle 100 by visually recognizing the virtual image 300. Further, in the present content example, when the vehicle 100 can not enter the specific area A1, the virtual image 300 of the content representing the avoidance route is projected to the target space 400. For this reason, there is an advantage that it is easy for the user 200 to select the avoidance of the specific area A1 which can not be entered by the user 200 visually recognizing the virtual image 300.
- the processing of steps S101 and S102 may be performed after the processing of step S103, not before the processing of step S103.
- the processes of steps S101 and S102 are performed only when the road surface 600 matches the predetermined standard.
- the color of the specific area A1 in the marker 310 may be different from that of the part other than the specific area A1 if the vehicle 100 can not enter the specific area A1. In this aspect, it is easy for the user 200 to perceive that the automobile 100 can not enter the specific area A1.
- control unit 5 may project the virtual image 300 of the content representing the stop of the vehicle 100 onto the target space 400 when there is no route capable of avoiding the object. In this aspect, it is easy for the user 200 to perceive that the vehicle 100 should be stopped.
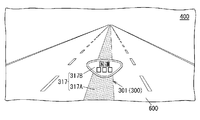
- FIGS. 7A and 7B show the virtual image 300 from the first lane 601 where the automobile 100 (moving object) is traveling to another lane 602. It is projected onto the target space 400 in a lane change situation.
- FIG. 7A shows the state of the road surface 600 where the vehicle 100 can change lanes without acceleration or deceleration.
- FIG. 7B shows the situation of the road surface 600 where the other automobile 110 runs parallel to the automobile 100 and the lane can not be changed unless the automobile 100 accelerates.
- a virtual image 300 composed of two markers 312 and 313 is projected onto the target space 400 as shown in FIG.
- a marker 312 is a first virtual image 301 and represents a specific area A1 in a second lane 602 different from the first lane 601 in which the vehicle 100 is traveling.
- the specific area A1 changes color (or shape) depending on whether the vehicle 100 can enter (that is, lane change is possible) or not.
- a marker 313 is a first virtual image 301 and represents a plurality of (here, two) arrows for prompting the user 200 to change the lane.
- the marker 313 is projected to the target space 400 only when the vehicle 100 can enter.
- the control unit 5 when the user 200 operates the turn signal, the control unit 5 is based on one or more pieces of mobile object information (for example, vehicle speed, object information around the vehicle, etc.) acquired from the acquisition unit 6. Then, it is determined whether the vehicle 100 can enter the specific area A1.
- the control unit 5 also uses detection information from a BSM (Blind Spot Monitor) system as one piece of mobile object information.
- BSM Breast Spot Monitor
- the shaded lines in FIG. 7A represent the detection area of the BSM system.
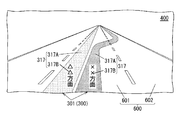
- a virtual image 300 consisting of three markers 312, 313, 314 is projected onto the target space 400.
- a marker 314 is a first virtual image 301 and represents a plurality of (here, three) arrows for urging the user 200 to accelerate or decelerate (here, acceleration).
- the control unit 5 accelerates or decelerates the vehicle 100 based on the one or more pieces of mobile object information acquired from the acquisition unit 6, and thereby the specific area A1. It is judged whether or not it is possible to enter.
- the control unit 5 uses, for example, information such as a vehicle speed, object information around the own vehicle, and a relative velocity with another vehicle 110 as the moving body information.
- the control unit 5 may use detection information from the BSM system.
- the attribute information of the virtual image 300 is information indicating whether or not the vehicle 100 can enter the specific area A1 in the traveling direction of the vehicle 100. Further, in the present content example, the specific area A1 is in a lane (second lane 602) different from the lane (first lane 601) in which the vehicle 100 travels.
- the control unit 5 acquires one or more pieces of mobile object information from the acquisition unit 6 (step S201). Then, the control unit 5 constructs a pseudo space (virtual 3D space) imitating the target space 400 based on the acquired one or more pieces of moving body information (step S202).
- a pseudo space virtual 3D space
- control unit 5 determines whether the direction indicator is in operation (step S203). If the turn signal indicator is not in operation (No at Step S203), the user 200 does not have the intention to change the lane, and the control unit 5 again executes Step S201 without performing the subsequent processing. On the other hand, when the turn indicator is in operation (step S203: Yes), the control unit 5 determines the specific area A1 that can enter the second lane 602 based on the one or more pieces of mobile object information acquired from the acquisition unit 6. Is determined (step S204).
- step S204 If the specific area A1 accessible to the second lane 602 is present (step S204: Yes), the control unit 5 draws the specific area A1 accessible to the second lane 602 of the pseudo space (step S205). In addition, the control unit 5 draws information for prompting a lane change in the first lane 601 of the pseudo space (step S206). After that, the control unit 5 controls the drive unit 2 and the irradiation unit 3 to project the content drawn in the pseudo space as the virtual image 300 on the target space 400 (step S207). As a result, in the target space 400, the marker 312 representing the specific area A1 is projected to the second lane 602, and the marker 313 for prompting a lane change is projected to the first lane 601.
- step S04 determines whether the specific area A1 accessible can be generated by acceleration or deceleration of the vehicle 100. It judges (step S208).
- step S208 determines whether the specific area A1 accessible can be generated by acceleration or deceleration of the vehicle 100. It judges (step S208).
- step S208: Yes the control unit 5 draws the specific area A1 that can enter the second lane 602 of the pseudo space (step S209). Further, the control unit 5 draws information for prompting a lane change in the first lane 601 of the pseudo space and information for prompting acceleration or deceleration (step S210).
- control unit 5 controls the drive unit 2 and the irradiation unit 3 to project the content drawn in the pseudo space as the virtual image 300 on the target space 400 (step S207).
- the marker 312 representing the specific area A1 is projected to the second lane 602
- the marker 313 for prompting lane change, and the marker 314 for prompting acceleration or deceleration are projected to the first lane 601 .
- step S208 when the entryable specific area A1 does not occur (step S208: No), the control unit 5 draws entry impossibility information in the pseudo space (step S211).
- the entry impossibility information is information indicating that the vehicle 100 can not enter the specific area A1 (that is, it can not change lanes).
- the control unit 5 controls the drive unit 2 and the irradiation unit 3 to project the content drawn in the pseudo space as the virtual image 300 on the target space 400 (step S207). Thereby, in the target space 400, the marker 312 representing the inaccessible specific area A1 is projected to the second lane 602.
- a virtual image 300 of content that indicates whether the vehicle 100 can enter the specific area A1 in the second lane 602 is projected onto the target space 400. Therefore, by visually recognizing the virtual image 300, the user 200 can easily determine whether to change the lane.
- the processes of steps S201 and S202 may be performed after the process of step S203, not before the process of step S203. In this case, the processes of steps S201 and S202 are performed only when it is determined that the turn signal is operating.
- virtual image 300 of this example of contents may be projected on object space 400, for example in the situation which parks car 100 on a road shoulder. This is because when the automobile 100 is to be parked on the road shoulder, the user 200 operates the turn signal as in the case of the lane change. In this case, the specific area A1 is not on the second lane 602 but on the shoulder of the first lane 601.
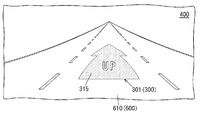
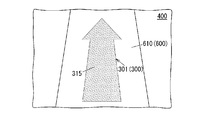
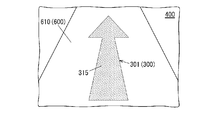
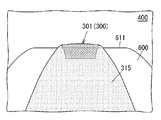
- the virtual image 300 is composed of the marker 315 as shown in FIGS. 11A and 11B.
- a marker 315 is a first virtual image 301 in the form of an arrow, and represents the slope of the road surface 600 on which the vehicle 100 (moving object) is traveling.
- the marker 315 has a shape in which the shaft of the arrow is tapered from the near side to the far side, and has a character string of “UP”.
- the marker 315 indicates that the road surface 600 is an upward slope 610.
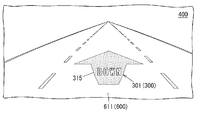
- the marker 315 is shaped such that the shaft of the arrow becomes thicker as it goes from the near side to the far side, and has a character string of "DOWN”.
- the marker 315 indicates that the road surface 600 has a downward slope 611. That is, in the present content example, the attribute information of the virtual image 300 is information representing the gradient of the road surface 600 on which the vehicle 100 is moving.
- the virtual image 300 is displayed, for example, from when the vehicle 100 is located in front of the slope until it reaches the road surface 600 without the slope.
- the control unit 5 uses the marker 315 as the target space 400 based on one or more pieces of mobile object information (for example, road information at the vehicle position, vehicle speed, inclination of the vehicle, etc.) acquired from the acquisition unit 6.
- the display of the virtual image 300 is controlled so as to be superimposed and projected on the road surface 600 at the position.
- the virtual image 300 of the content representing the slope of the road surface 600 on which the vehicle 100 is traveling is projected onto the target space 400. Therefore, the user 200 has an advantage of easily grasping whether the road surface 600 is the upward slope 610 or the downward slope 611 by visually recognizing the virtual image 300, and performing the driving according to the slope of the road surface 600 easily.
- the virtual image 300 of this example of content is effective, for example, when it is difficult for the user 200 to notice that there is a gradient due to the structure or scenery of the road surface 600.
- the vehicle 100 may naturally decelerate, leading to traffic congestion.
- the distance between the vehicle 100 and another vehicle ahead may be narrowed more than necessary due to the vehicle 100 accelerating naturally. There is. Even in such a case, the user 200 can perform appropriate acceleration or deceleration by visually recognizing the virtual image 300.
- the marker 315 shown to FIG. 11A and 11B has the character string of "UP” and “DOWN", respectively, it is not the meaning limited to this.
- none of the markers 315 shown in FIGS. 11A and 11B may have a character string.
- the marker 315 shown to FIG. 11A and 11B may be comprised with a moving image instead of a still image.
- the marker 315 illustrated in FIG. 11A may be a moving image that waves toward the near side as time passes.
- the marker 315 illustrated in FIG. 11B may be a moving image that waves back toward the back side with the passage of time.
- the attribute information of the virtual image 300 preferably changes according to the position of the vehicle 100 relative to the slope. Specifically, based on the one or more pieces of mobile object information acquired from the acquisition unit 6, the control unit 5 calculates in advance the inclination of the road surface 600 in front and the coordinates at which the inclination changes. Then, using the calculated coordinates as a starting point, the control unit 5 changes the shape of the marker 315 (here, the shape of the shaft of the arrow) according to the inclination angle of the gradient.
- FIG. 12A when the vehicle 100 approaches the upward slope 610, a marker 315 as shown in FIG. 12B is projected onto the target space 400.
- this marker 315 the width of the arrow shaft and the rate of change in width of the arrow are different between the marker 315A on the front side and the marker 315B on the back side, with the start position of the upward slope 610 as a boundary.
- FIGS. 13A and 14A when the vehicle 100 starts traveling on the up slope 610, the markers 315 as shown in FIGS. 13B and 14B are projected onto the target space 400. In these markers 315, as the inclination of the automobile 100 approaches the inclination angle of the upward slope 610, the width of the shaft of the arrow is narrowed.
- the user 200 recognizes that the slope is before the vehicle 100 reaches the slope by visually recognizing the virtual image 300. It is possible. Further, in this configuration, there is an advantage that the user 200 can easily drive while recognizing the inclination of the road surface 600 by recognizing the virtual image 300.
- the auxiliary marker 316 may be projected onto the target space 400 in addition to the marker 315.
- the auxiliary marker 316 is a first virtual image 301, and has an arrow shape that describes an arch that is convex upward.
- the auxiliary marker 316 indicates that the road surface 600 has a downward slope 611. In this case, by visually recognizing not only the marker 315 but also the auxiliary marker 316, there is an advantage that the gradient of the road surface 600 can be more intuitively recognized.
- the marker 315 is projected onto the target space 400 in such a manner that a part is seen through by changing a part of the transmittance or color. It is also good.
- the portion of the marker 315 extending to the downward slope 611 is represented as being transmitted through the road surface 600. Also in this case, the visual recognition of the marker 315 by the user 200 is advantageous in that the gradient of the road surface 600 can be more intuitively recognized.
- the arrow-shaped marker 315 is projected as the virtual image 300 onto the target space 400, but the present invention is not limited thereto.
- a marker 315 of a marker representing the speed limit on the road surface 600 (here, 50 km / hr) may be projected onto the target space 400 as a virtual image 300.
- the user 200 has an advantage that it is easy to recognize two pieces of information: the slope of the road surface 600 and the speed limit on the road surface 600.
- the marker 315 may be configured by, for example, an icon other than a sign, or may be configured by a character string such as “with gradient”. That is, the marker 315 may be at least an aspect that represents the slope of the road surface 600.
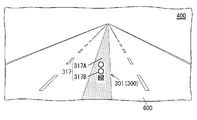
- the virtual image 300 is configured of a marker 317 including two markers 317A and 317B.
- a marker 317A is a first virtual image 301, and represents a predicted path of the automobile 100 (moving object).
- the marker 317B is the first virtual image 301 and represents the name of the road on which the vehicle 100 is traveling (here, the national route ⁇ ), and is projected on the marker 317A. That is, in the present content example, the attribute information of the virtual image 300 is information representing the name of a road including the road surface 600 on which the automobile 100 is moving.
- the virtual image 300 is always displayed, for example, while the automobile 100 is in operation.
- the control unit 5 sets the marker 317 on the road surface 600 in the target space 400 based on one or more pieces of mobile object information (for example, a steering angle, road information at the vehicle position, etc.) acquired from the acquisition unit 6.
- the display of the virtual image 300 is controlled to be superimposed and projected.
- the virtual image 300 of content representing the name of the road on which the vehicle 100 is traveling is projected onto the target space 400. Therefore, by visually recognizing the virtual image 300, the user 200 has an advantage that it is easy to drive while grasping where it is heading.
- the name of the road represented by the marker 317B is a national road, but it may be a prefectural road, a prefectural road, a city road or the like. Further, in the present content example, the name of the road represented by the marker 317B may be, for example, a line (here, an ⁇ line) as shown in FIG. 17B, a streak, a street, a highway, a bypass, etc. It is also good.
- the marker 317B may represent the direction in which the vehicle 100 is traveling (here, ⁇ direction), as shown in FIG. 18, for example. That is, in the present content example, the attribute information of the virtual image 300 may be information indicating the direction of the road including the road surface 600 on which the automobile 100 is moving. In this case, not only the marker 317 representing the direction of the lane in which the vehicle 100 is traveling (the first lane 601) but also the marker 317 representing the direction (here, the XX direction) of the other lane (the second lane 602) May also be projected to the target space 400.
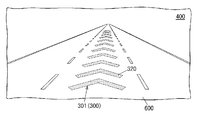
- the virtual image 300 is composed of a plurality of (here, three) markers 318 as shown in FIG. 19 and is a moving image.
- the plurality of markers 318 are not the first virtual image 301 having a width in the traveling direction of the vehicle 100, but a second virtual image 302 viewed upright on the road surface 600 at a certain distance from the user 200. is there.
- the virtual image 300 is viewed by the user 200 as an image having a width in the traveling direction of the automobile 100 as a whole by the plurality of markers 318 being projected on the target space 400 as a moving image. .
- the marker 318 located at the foremost position is referred to as “marker 318A”
- the marker 318 located at the farthest end is referred to as “marker 318C”
- the marker located between markers 318A and 318C is referred to as “marker 318B”.
- the virtual image 300 is projected to the target space 400 when the vehicle 100 enters in front of the curve 603 having a curvature equal to or greater than a predetermined value.
- the control unit 5 determines whether or not the curve 603 exists in front of the automobile 100 based on the one or more pieces of mobile body information (for example, road information at the vehicle position) acquired by the acquisition unit 6. to decide. Then, when the control unit 5 determines that the curve 603 exists in front of the automobile 100, the virtual image is projected so that the three markers 318 are projected above the curve 603 in the target space 400 (above the guardrail in FIG. 19). Control 300 displays.
- the three markers 318 are all projected to the target space 400 as an icon including a figure of an arrow pointing to the left.
- the three markers 318 are all projected onto the target space 400 as icons containing the shape of the arrow pointing to the right.
- the control unit 5 sets the virtual image 300 so that three markers 318 are projected in the order of the marker 318A, the marker 318B, the marker 318C, the marker 318A,... At predetermined intervals (for example, one frame to several frames). Control the display. In addition, the three markers 318 move to the target space 400 so that the icon moves to the left and the size of the icon decreases as the distance from the vehicle 100 increases (that is, as the viewing distance increases). It is projected. Thus, at the user 200, the three markers 318 are viewed as moving smoothly along the curve 603.
- the virtual image 300 is projected as a moving image on the target space 400. Therefore, by visually recognizing the virtual image 300, the user 200 has an advantage that it is easy to drive while intuitively grasping the change in the depth of the road surface 600, the curvature of the curve 603, and the direction of the curve 603.
- the virtual image 300 is effective at night at which the user 200 is less likely to grasp the sense of distance than at daytime. That is, even when the user 200 does not notice the presence of the curve 603 because the front is dark, the user 200 can notice the presence of the curve 603 by visually recognizing the virtual image 300.
- the virtual image 300 is a moving image, it is possible to project a plurality of markers 318 one frame at a time.
- the display system 10 is configured to simultaneously project a plurality of markers 318 into one frame, there is a possibility that the display system 10 can not be mounted on the automobile 100 because the volume of the display system 10 is large.
- the display system 10 is configured to project the plurality of markers 318 one by one in one frame, the volume of the display system 10 does not easily increase, and as a result, can not be mounted on the automobile 100
- the sex can be reduced.
- the user 200 can easily gaze at the condition of the road surface 600 represented by the virtual image 300 as compared with the case where the virtual image 300 is a still image.
- the virtual image 300 is projected above the curve 603 in the target space 400 in this example of content, it is not the meaning limited to this.
- the virtual image 300 may be projected so as to be superimposed on the road surface 600 in the target space 400.
- the plurality of markers 318 may be projected onto the target space 400 as the first virtual image 301.
- the virtual image 300 includes two markers 319A and 319B.
- each of the two markers 319A and 319B may be referred to as a "marker 319".
- a marker 319A is a first virtual image 301, and is another road surface 604 connected to the road surface 600 on which the vehicle 100 (moving object) is traveling, and represents another road surface 604 to which the vehicle 100 can enter.
- the other road surface 604 is an entrance of a freeway.
- the marker 319B is a second virtual image 302 and represents the destination of another road surface 604 indicated by the marker 319A.
- the marker 319B is an icon schematically representing a highway, and is projected on the marker 319A in an overlapping manner.
- the attribute information of the virtual image 300 is information representing another road surface 604 to which the vehicle 100 can enter, among the other road surfaces 604 connected to the road surface 600 on which the vehicle 100 is moving. Therefore, although not shown in FIG. 20, even on the other road surface 604 connected to the road surface 600, the marker 319 is on the other road surface 604 (for example, a one-way road surface) to which the vehicle 100 can not enter. Is not projected.
- the virtual image 300 is always displayed, for example, while the automobile 100 is in operation.
- the control unit 5 superimposes the marker 319 on another road surface 604 in the target space 400 based on one or more pieces of mobile object information (for example, road information at the vehicle position, etc.) acquired from the acquisition unit 6. Control the display of the virtual image 300 so as to be projected.
- the virtual image 300 of content representing another accessible road surface 604 connected to the road surface 600 on which the automobile 100 is traveling is projected to the target space 400. Therefore, there is an advantage that the user 200 can easily drive by visually recognizing the virtual image 300 while considering another route different from the current route of the automobile 100. For example, when the user 200 recognizes that there is an entrance of a freeway by visually recognizing the virtual image 300, it is possible to select a route, such as whether to travel on a general road or travel on a freeway. is there.
- another road surface 604 to which the vehicle 100 can enter is, for example, an entrance of a parking lot, an entrance of a store, or the like.
- the marker 319B indicating the destination of another road surface 604 to which the vehicle 100 can enter is projected to the target space 400, but the marker 319B may not be projected.
- the virtual image 300 is composed of a plurality of markers 320 as shown in FIG.
- Each of the plurality of markers 320 is projected onto the target space 400 as an arrow directed along the traveling direction of the automobile 100 (mobile body).
- the plurality of markers 320 may cause visual illusion by the user 200 to cause the illusion that the user 200 is accelerating, and may cause the illusion to the user 200 that the vehicle speed of the automobile 100 is faster than the actual vehicle speed. That is, in the present content example, the content of the virtual image 300 is information that causes the user 200 driving the automobile 100 to be considered to be accelerating.
- the virtual image 300 is displayed, for example, when the vehicle speed of the automobile 100 exceeds a threshold speed (here, the speed limit of the road on which the automobile 100 is traveling).
- the control unit 5 sets a plurality of markers 320 in the target space 400 based on one or more pieces of mobile object information (for example, road information at the vehicle position, the vehicle speed of the vehicle, etc.) acquired from the acquisition unit 6.
- the display of the virtual image 300 is controlled so as to be superimposed and projected on the road surface 600 at the position.
- the virtual image 300 which causes the user 200 to be considered as accelerating is projected onto the target space 400. Therefore, by visually recognizing the virtual image 300, the user 200 recognizes that the current vehicle speed is too fast, and tries to lower the current vehicle speed by, for example, stepping on the brake. That is, according to the present embodiment, it is possible to prompt the user 200 to suppress the current vehicle speed to the speed limit or less by making the user 200 visually recognize the virtual image 300.
- the vehicle 100 when the vehicle 100 is provided with a configuration to emit a warning sound when the speed limit is exceeded, the user 200 may feel uncomfortable due to the frequent generation of the warning sound.
- the possibility of giving a sense of discomfort to the user 200 can be reduced by displaying the virtual image 300 instead of the warning sound.
- a paint may be applied to make the user 200 think that the user 200 is accelerating, but the place where such paint is applied is limited.
- the virtual image 300 is not limited to the plurality of markers 320 described above, and may be in another aspect. In other words, the virtual image 300 may be in any mode as long as it allows the user 200 to have an illusion of acceleration.
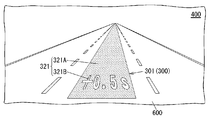
- the virtual image 300 is composed of a marker 321 composed of two markers 321A and 321B.
- a marker 321A is a first virtual image 301, and represents a past route on which the vehicle 100 (moving object) actually travels.
- the departure position and the destination position are the same for the current route and the past route, and the road on which the vehicle 100 travels is the same, for example, a circuit, a route through commuting, and the like.
- the marker 321B is the first virtual image 301, and represents the difference between the time taken for the current route from the departure position to the current position and the time taken for the past route.
- the marker 321B formed of the character string "+0.5 s" is projected on the marker 321A in an overlapping manner. That is, in the present content example, the content of virtual image 300 represents the past route where the current vehicle 100 travels the same position as the departure position and the destination position, and the road on which vehicle 100 travels is the same. It is information.
- the virtual image 300 is displayed, for example, from the start of driving of the automobile 100.
- the control unit 5 records the shortest past route of the required time from the departure position to the destination position among the past routes. Then, when the driving of the automobile 100 is started, the control unit 5 controls the display of the virtual image 300 so that the marker 321A is projected in a superimposed manner on the road surface 600 in the target space 400.
- the information included in the marker 321A is information based on one or more pieces of mobile object information (for example, road information at the vehicle position, etc.) acquired from the acquisition unit 6.
- control unit 5 compares in real time the time taken for the current route from the departure position to the current position and the time taken for the past route so that the marker 321B is projected so as to overlap the marker 321A. , Control the display of the virtual image 300. Thereafter, when the vehicle 100 reaches the target position, if the time taken for the current route from the departure position to the target position is shorter than the time taken for the route in the past, the control unit 5 takes the current route to the past route. Record as
- the virtual image 300 of the content representing the past route is projected onto the target space 400.
- the user 200 can drive while searching for the optimal route to the target position by visually recognizing the virtual image 300 and comparing the current route with the past route. It has the advantage of being possible.
- the display system 10 does not have to project the virtual image 300 of the present content example onto the target space 400.
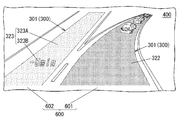
- the virtual image 300 is configured of a marker 322 and a marker 323 formed of two markers 323A and 323B.
- a marker 322 is a first virtual image 301 and represents the current guidance route by the navigation system.
- a marker 323A is the first virtual image 301, and represents the guide route after the re-searching by the navigation system.
- the marker 323B is the first virtual image 301, and represents the difference between the time estimated to be required for the current guide route from the current position to the target position and the time estimated to be required for the guide route after re-searching. There is.
- the virtual image 300 is displayed when the user 200 re-searches the guide route to the target position by the navigation system, for example, when congestion occurs in the current guide route.
- the control unit 5 causes the markers 321 and 322 to be projected on the road surface 600 based on one or more pieces of mobile object information (for example, road information at the vehicle position, etc.) acquired from the acquisition unit 6.
- the marker 321 is projected on the first lane 601 on which the traffic congestion occurs in the road surface 600
- the marker 322 is projected on the second lane 602 branched from the first lane 601.
- the virtual image 300 of the content representing the current guide route and the guide route after the re-search is It is projected.
- the user 200 visually recognizes the virtual image 300 and compares the current guidance route with the guidance route after re-searching, thereby the merit (or disadvantage) of the guidance route after the user 200 searching again.
- the above embodiment is only one of various embodiments of the present disclosure.
- the above embodiment can be variously modified according to the design and the like as long as the object of the present disclosure can be achieved.
- the same function as that of the display system 10 may be embodied by a control method of the display system 10, a computer program, a recording medium recording the program, or the like.
- the control method of the display system 10 is a control method of the display system 10 including the projection unit 40 and the control unit 5.
- the projection unit 40 projects the virtual image 300 on the target space 400.
- the control unit 5 controls the display of the virtual image 300.
- the control method of the display system 10 displays a virtual image 300 of a content having a width in the traveling direction of the moving object (here, the automobile 100) and at least indicating attribute information of the road surface 600 on which the moving object is moving.
- a program according to an aspect is a program for causing a computer system to execute the control method of the display system 10 described above.
- An execution subject of the display system 10 or the control method in the present disclosure includes a computer system.
- the computer system mainly includes a processor and memory as hardware.
- the processor executes the program stored in the memory of the computer system to implement a function as an execution subject of the system or method in the present disclosure.
- the program may be pre-recorded in the memory of the computer system, but may be provided through a telecommunication line. Also, the program may be provided by being recorded in a non-transitory recording medium such as a memory card readable by a computer system, an optical disk, a hard disk drive and the like.
- a processor of a computer system is configured with one or more electronic circuits including a semiconductor integrated circuit (IC) or a large scale integrated circuit (LSI).
- the plurality of electronic circuits may be integrated into one chip or may be distributed to a plurality of chips.
- the plurality of chips may be integrated into one device or may be distributed to a plurality of devices.
- control unit 5 of the display system 10 may be distributed to a plurality of systems (devices).
- at least part of the functions of the control unit 5 may be realized by a cloud (cloud computing).
- the display system 10 communicates directly between a vehicle and a vehicle (between vehicles) or between a vehicle and an infrastructure such as traffic lights and road signs (between roads and vehicles), so-called V2X (Vehicle The communication technology of “everything” may be used.
- V2X communication technology for example, the vehicle 100 can acquire mobile object information from surrounding vehicles or infrastructure. Further, the contents of the virtual image 300 to be projected to the target space 400 may be determined by infrastructure, and in this case, at least a part of the control unit 5 may not be mounted on the vehicle 100.
- the display system 10 is not limited to the configuration in which the virtual image 300 is projected on the target space 400 set ahead of the moving direction of the moving body (the automobile 100).
- the virtual image 300 may be projected upward or the like.
- the display system 10 is not limited to the head-up display used for the automobile 100, and can be applied to mobile bodies other than the automobile 100, such as a two-wheeled vehicle, a train, an aircraft, a construction machine, and a ship. Furthermore, the display system 10 is not limited to a mobile body, and may be used, for example, in an amusement facility, or used as a wearable terminal such as a head mounted display (HMD: Head Mounted Display), a medical facility, or a stationary device. It may be done.
- HMD Head Mounted Display
- the display system 10 is not limited to the configuration in which the virtual image 300 is projected using a laser beam.
- the display system 10 may be configured to project an image (virtual image 300) with a projector from behind the screen 1 on the diffuse transmission type screen 1.
- the display system 10 may be configured to project the virtual image 300 corresponding to the image displayed on the liquid crystal display through the projection unit 40.
- the display system (10) includes the projection unit (40) and the control unit (5).
- the projection unit (40) projects the virtual image (300) onto the target space (400).
- the control unit (5) controls the display of the virtual image (300).
- the control unit (5) displays a virtual image (300) of a content having a width in the traveling direction of the moving body (for example, the car (100)) and at least indicating attribute information of the road surface (600) on which the moving body is moving. Do.
- the user (200) can easily grasp the condition of the road surface (600) by viewing the virtual image (300) displayed in the target space (400). Further, according to this aspect, the virtual image (300) of the content representing the attribute information of the road surface (600) is displayed in the target space (400) regardless of the use of the navigation system. Therefore, according to this aspect, there is an advantage that the user (200) can easily grasp the condition of the road surface (600) without particular awareness.
- the user (200) intuitively grasps the situation of the road surface (600). It has the advantage of being easy to do. That is, when the virtual image (300) is displayed in the target space (400) without having a width in the traveling direction of the moving body, the virtual image (300) is perceived by the user (200) as a planar object. That is, since the virtual image (300) is perceived by the user (200) as a form different from the real space which is a set of three-dimensional objects, the user (200) may feel uncomfortable.
- the user (200) when the user (200) sees such a virtual image (300), the user (200) performs a process of perceiving the virtual image (300) as an object in real space in the brain of the user (200). It is difficult to intuitively grasp the virtual image (300).
- the virtual image (300) since the virtual image (300) has a width in the traveling direction of the moving body, the virtual image (300) is perceived by the user (200) as a solid shaped object having the same form as real space. easy. Therefore, according to this aspect, when the user (200) looks at the virtual image (300), the processing load on the brain of the user (200) is reduced, so that the user (200) generates a virtual image (300). ) Has the advantage of being easy to grasp intuitively.
- the user (200) is compared with the situation of the road surface (600) compared to the user (200) grasping the route information to the destination. It is likely that immediate understanding is required. According to this aspect, since the user (200) can easily grasp the virtual image (300) intuitively, it is easy to satisfy the above-mentioned request for immediacy, and as a result, the function of supporting the driving of the user (200) is improved. Has the advantage of being able to
- the attribute information includes one or more of information on the position of the mobile body, information on an object around the mobile body, and information on the state of the mobile body Information based on
- control unit (5) is configured such that, when the mobile body can not enter the specific area (A1), the mobile body is the specific area (A1) ) Is controlled to display a virtual image (300) of contents representing an avoidable route.
- the specific area (A1) is in another lane (602) different from the lane (601) in which the mobile object is moving.
- the attribute information is information representing the gradient of the road surface (600) on which the moving object is moving.
- the attribute information represents the name or direction of a road including the road surface (600) on which the moving object is moving. It is information.
- the virtual image (300) is a moving image.
- the user (200) can easily gaze at the condition of the road surface (600) represented by the virtual image (300) as compared with the case where the virtual image (300) is a still image.
- the attribute information includes another road surface (604) connected to the road surface (600) on which the moving object is moving. Information indicating the other road surface (604) to which the moving object can enter.
- An information presentation system (1000) according to a tenth aspect includes the display system (10) according to any of the first to ninth aspects and a detection system (7).
- the detection system (7) detects an object around the moving body.
- the user (200) can easily grasp the condition of the road surface (600) by viewing the virtual image (300) displayed in the target space (400).
- a control method of a display system (10) is a control method of a display system (10) including a projection unit (40) and a control unit (5).
- the projection unit (40) projects the virtual image (300) onto the target space (400).
- the control unit (5) controls the display of the virtual image (300).
- the control method of the display system (10) displays a virtual image (300) of contents having a width in the traveling direction of the moving object and at least indicating attribute information of the road surface (600) on which the moving object is moving.
- the user (200) can easily grasp the condition of the road surface (600) by viewing the virtual image (300) displayed in the target space (400).
- a program according to a twelfth aspect is a program for causing a computer system to execute the control method of the display system (10) of the eleventh aspect.
- the user (200) can easily grasp the condition of the road surface (600) by viewing the virtual image (300) displayed in the target space (400).
- a mobile according to a thirteenth aspect includes the display system (10) according to any of the first to ninth aspects, and a reflective member (eg, a windshield (101)).
- a reflective member eg, a windshield (101)
- the user (200) can easily grasp the condition of the road surface (600) by viewing the virtual image (300) displayed in the target space (400).
- various configurations (including modified examples) of the display system (10) according to the embodiment can be embodied by a control method of the display system (10) and a (computer) program.
- the configurations according to the second to ninth aspects are not essential for the display system (10), and can be omitted as appropriate.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Optics & Photonics (AREA)
- Instrument Panels (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Controls And Circuits For Display Device (AREA)
Abstract
表示システムは、投影部と、制御部と、を備える。投影部は、対象空間に虚像を投影する。制御部は、虚像の表示を制御する。制御部は、移動体(自動車)の進行方向に幅を持ち、少なくとも移動体が移動している路面の属性情報を表す内容の虚像(第1虚像)を表示するように制御する。
Description
本開示は、一般に表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体に関する。より詳細には、本開示は、対象空間に虚像を投影する表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体に関する。
従来、表示体から投影される表示画像をフロントガラス(ウインドシールド)内面の反射体にて反射し、虚像として遠方表示する車両用表示装置(表示システム)が知られており、例えば特許文献1に開示されている。特許文献1に記載の車両用表示装置は、ナビゲーション装置からの経路誘導情報(例えば、現在位置近傍の道路地図、走行方向の表示)、誘導指標(例えば、直進、左折、右折などの矢印指標)を、虚像として表示する。
本開示は、移動体が移動している路面の状況を把握し易い表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体を提供することを目的とする。
本開示の一態様に係る表示システムは、画像を投影することにより、対象者が移動体の前方の対象空間に虚像が投影されているように視認する表示システムであって、投影部と、制御部と、を備える。投影部は、前記画像を投影する。制御部は、前記画像の表示を制御する。前記制御部は、前記画像の表示を、前記移動体の進行方向に幅を持ち、少なくとも前記移動体が移動している路面の属性情報を表す内容の画像を表示するように制御する。
本開示の別の一態様に係る情報提示システムは、上記の表示システムと、検知システムと、を備える。前記検知システムは、前記移動体の周辺の物体を検知する。
本開示のさらに別の一態様に係る表示システムの制御方法は、投影部と、制御部と、を備える表示システムの制御方法である。前記投影部は、前記画像を投影する。前記制御部は、前記画像の表示を制御する。前記表示システムの制御方法は、移動体の進行方向に幅を持ち、前記移動体が移動している路面の属性情報を表す内容の前記画像を表示する。
本開示の一態様に係るプログラムは、コンピュータシステムに、上記の表示システムの制御方法を実行させるためのプログラムである。
本開示の一態様に係る移動体は、上記の表示システムと、反射部材と、を備える。前記反射部材は、光透過性を有し、前記投影部から出射された光を反射する。
本開示は、移動体が移動している路面の状況を把握し易い、という利点がある。
本発明の実施の形態の説明に先立ち、従来の装置における問題点を簡単に説明する。車両(移動体)の運転者は、目的地への経路を把握することは可能であるが、車両が移動している路面の状況を把握し難いという問題があった。
(1)概要
以下、本開示の一実施形態に係る表示システム10、表示システム10を備える情報提示システム1000、及び表示システム10を備える移動体(ここでは、自動車100)について図1~図3を用いて説明する。本実施形態の表示システム10は、図1~図3に示すように、例えば、自動車100に用いられるヘッドアップディスプレイ(HUD:Head-Up Display)である。この表示システム10は、自動車100のウインドシールド101に下方から画像を投影するように、自動車100の車室内に設置されている。図1の例では、ウインドシールド101の下方のダッシュボード102内に、表示システム10が配置されている。表示システム10からウインドシールド101に画像が投影されると、反射部材としてのウインドシールド101で反射された画像がユーザ200(運転者)に視認される。つまり、自動車100(移動体)は、表示システム10と、反射部材(ここでは、ウインドシールド101)と、を備えている。反射部材は、光透過性を有し、表示システム10の備える投影部40(後述する)から出射された光を反射する。
以下、本開示の一実施形態に係る表示システム10、表示システム10を備える情報提示システム1000、及び表示システム10を備える移動体(ここでは、自動車100)について図1~図3を用いて説明する。本実施形態の表示システム10は、図1~図3に示すように、例えば、自動車100に用いられるヘッドアップディスプレイ(HUD:Head-Up Display)である。この表示システム10は、自動車100のウインドシールド101に下方から画像を投影するように、自動車100の車室内に設置されている。図1の例では、ウインドシールド101の下方のダッシュボード102内に、表示システム10が配置されている。表示システム10からウインドシールド101に画像が投影されると、反射部材としてのウインドシールド101で反射された画像がユーザ200(運転者)に視認される。つまり、自動車100(移動体)は、表示システム10と、反射部材(ここでは、ウインドシールド101)と、を備えている。反射部材は、光透過性を有し、表示システム10の備える投影部40(後述する)から出射された光を反射する。
このような表示システム10によれば、ユーザ200は、自動車100の前方(車外)に設定された対象空間400に投影された虚像300を、ウインドシールド101越しに視認する。ここでいう「虚像」は、表示システム10から出射される光がウインドシールド101等の反射物にて発散するとき、その発散光線によって、実際に物体があるように結ばれる像を意味する。そのため、ユーザ200は、自動車100の前方に広がる実空間に重ねて、表示システム10にて投影される虚像300を見ることができる。したがって、表示システム10によれば、例えば、車速情報、ナビゲーション情報、歩行者情報、前方車両情報、車線逸脱情報、及び車両コンディション情報等の、種々の運転支援情報を、虚像300として表示し、ユーザ200に視認させることができる。これにより、ユーザ200は、ウインドシールド101の前方に視線を向けた状態から僅かな視線移動だけで、運転支援情報を視覚的に取得することができる。
本実施形態では、表示システム10は、図2に示すように情報提示システム1000の一部であり、運転支援情報の一部であるADAS情報(後述する)を、検知システム7から取得している。検知システム7は、自動車100の周辺の物体を検知するように構成されている。言い換えれば、情報提示システム1000は、表示システム10と、検知システム7と、を備えている。
本実施形態の表示システム10では、対象空間400に形成される虚像300は、図1及び図3に示すように、少なくとも第1虚像301と第2虚像302との2種類の虚像を含んでいる。ここでいう「第1虚像」は、第1仮想面501上に形成される虚像300(301)である。「第1仮想面」は、表示システム10の光軸500に対する傾斜角度αが所定値γよりも小さい(α<γ)仮想面である。また、ここでいう「第2虚像」は、第2仮想面502上に形成される虚像300(302)である。「第2仮想面」は、表示システム10の光軸500に対する傾斜角度βが所定値γよりも大きい(β>γ)仮想面である。ここでいう「光軸」は、後述する投影光学系4(図2参照)の光学系の光軸であって、対象空間400の中心を通り虚像300の光路に沿った軸を意味する。所定値γは一例として45度であって、傾斜角度βは一例として90度である。
また、本実施形態の表示システム10では、対象空間400に形成される虚像300は、第1虚像301及び第2虚像302に加えて、第3虚像303(図3参照)を含んでいる。「第3虚像」は、第2虚像302と同様に、光軸500に対する傾斜角度βが所定値γよりも大きい第2仮想面502上に形成される虚像300(303)である。詳しくは後述するが、第2仮想面502上に形成される虚像300のうち、可動スクリーン1aを透過する光によって形成される虚像が第2虚像302であって、固定スクリーン1bを透過する光によって形成される虚像が第3虚像303である。
本実施形態では、光軸500は、自動車100の前方の対象空間400において、自動車100の前方の路面600に沿っている。そして、第1虚像301は、路面600に略平行な第1仮想面501上に形成され、第2虚像302及び第3虚像303は、路面600に対して略垂直な第2仮想面502上に形成される。例えば、路面600が水平面である場合には、第1虚像301は水平面に沿って表示され、第2虚像302及び第3虚像303は鉛直面に沿って表示されることになる。ここで、図1に示すように、第1虚像301は、ユーザ200の目(アイポイント)から最も遠い部位と最も近い部位までの距離(「視距離」ともいう)が異なる。すなわち、第1虚像301は、移動体(自動車100)の進行方向の奥行きに幅を持つ虚像である。言い換えると、第1虚像301は、移動体の進行方向と平行に奥行きが異なる虚像である。
図3は、ユーザ200の視野を示す概念図である。すなわち、本実施形態の表示システム10は、図3に示すように、第1虚像301と、第2虚像302と、第3虚像303と、を表示可能である。第1虚像301は、路面600に沿って奥行きをもってユーザ200に視認される。第2虚像302及び第3虚像303は、ユーザ200から一定距離の路面600上に直立して視認される。したがって、ユーザ200においては、第1虚像301については路面600に略平行な平面上にあるように見え、第2虚像302及び第3虚像303については路面600に対して略垂直な平面上にあるように見える。第1虚像301の内容は、一例として、ナビゲーション情報として自動車100の進行方向を示す情報であり、路面600上に右折又は左折を示す矢印をユーザ200に提示すること等が可能である。第2虚像302の内容は、一例として、前方車両又は歩行者までの距離を示す情報であり、前方車両上に前方車両までの距離(車間距離)をユーザ200に提示すること等が可能である。第3虚像303の内容は、一例として、現在時刻、車速情報、及び車両コンディション情報であり、例えば文字、数字、及び記号、又は燃料計等のメータにてこれらの情報をユーザ200に提示すること等が可能である。
特に、本実施形態の表示システム10では、虚像300の内容は、自動車100の進行方向に幅を持ち、少なくとも自動車100が走行している路面600の属性情報を含んでいる。したがって、虚像300により、自動車100が走行している路面600の状況をユーザ200に提示すること等が可能である。ここでいう「路面600の属性情報」は、例えば路面600の勾配、路面600を含む道路の名称等のように路面600自体に関する情報の他に、路面600上にある物体に関する情報を含んでいる。路面600上にある物体とは、例えば路面600を移動する自動車100とは異なる他の移動体(ここでは、他の自動車)、路面600上の他の移動体以外の障害物(例えば、歩行者、工事現場など)である。詳細は、後述の「(4)虚像の内容」にて説明する。
(2)構成
本実施形態の表示システム10は、図2に示すように、複数のスクリーン1a,1bと、駆動部2と、照射部3と、投影光学系4と、制御部5と、取得部6と、を備えている。本実施形態では、投影光学系4は、照射部3と共に、対象空間400(図1参照)に虚像300(図1参照)を投影する投影部40を構成する。
本実施形態の表示システム10は、図2に示すように、複数のスクリーン1a,1bと、駆動部2と、照射部3と、投影光学系4と、制御部5と、取得部6と、を備えている。本実施形態では、投影光学系4は、照射部3と共に、対象空間400(図1参照)に虚像300(図1参照)を投影する投影部40を構成する。
複数のスクリーン1a,1bは、固定スクリーン1b、及び可動スクリーン1aを含んでいる。固定スクリーン1bは、表示システム10の筐体等に対して定位置に固定されている。可動スクリーン1aは、基準面503に対して角度θだけ傾斜している。更に、可動スクリーン1aは、基準面503に直交する移動方向X(図2に矢印X1-X2で示す方向)に、移動可能に構成されている。ここでいう「基準面」は、可動スクリーン1aの移動方向を規定する仮想平面であって、実在する面ではない。可動スクリーン1aは、基準面503に対して角度θだけ傾斜した姿勢を維持したまま、移動方向Xに直進移動可能に構成されている。以下、可動スクリーン1aと固定スクリーン1bとを特に区別しない場合、複数のスクリーン1a,1bの各々を「スクリーン1」と呼ぶこともある。
スクリーン1(可動スクリーン1a及び固定スクリーン1bの各々)は、透光性を有しており、対象空間400(図1参照)に虚像300(図1参照)を形成するための画像を形成する。すなわち、スクリーン1には、照射部3からの光によって画像が描画され、スクリーン1を透過する光により、対象空間400に虚像300が形成される。スクリーン1は、例えば、光拡散性を有し、矩形に形成された板状の部材からなる。スクリーン1は、照射部3と投影光学系4との間に配置されている。
駆動部2は、可動スクリーン1aを移動方向Xに移動させる。ここで、駆動部2は、可動スクリーン1aを、移動方向Xに沿って、投影光学系4に近づく向きと、投影光学系4から離れる向きとの両方に移動させることができる。駆動部2は、例えば、ボイスコイルモータ等の電気駆動型のアクチュエータからなり、制御部5からの第1制御信号に従って動作する。
照射部3は、走査型の光照射部であって、可動スクリーン1a又は固定スクリーン1bに対して光を照射する。照射部3は、光源31及び走査部32を有している。この照射部3は、光源31及び走査部32の各々が制御部5からの第2制御信号を従って動作する。
光源31は、レーザ光を出力するレーザモジュールからなる。この光源31は、赤色(R)のレーザ光を出力する赤色レーザダイオードと、緑色(G)のレーザ光を出力する緑色レーザダイオードと、青色(B)のレーザ光を出力する青色レーザダイオードと、を含んでいる。これら3種類のレーザダイオードから出力される3色のレーザ光は、例えば、ダイクロイックミラーにより合成され、走査部32に入射する。
走査部32は、光源31からの光を走査することにより、可動スクリーン1a又は固定スクリーン1bの一面上を走査する光を可動スクリーン1a又は固定スクリーン1bに照射する。ここで、走査部32は、可動スクリーン1a又は固定スクリーン1bの一面に対し、二次元的に光を走査する、ラスタスキャン(Raster scan)を行う。
投影光学系4は、照射部3から出力されスクリーン1を透過する光が入射光として入射し、入射光により、対象空間400(図1参照)に虚像300(図1参照)を投影する。ここで、投影光学系4は、スクリーン1に対して可動スクリーン1aの移動方向Xに並ぶように配置されている。投影光学系4は、図2に示すように、拡大レンズ41、第1ミラー42、及び第2ミラー43を有している。
拡大レンズ41、第1ミラー42、及び第2ミラー43は、スクリーン1を透過した光の経路上に、この順で配置されている。拡大レンズ41は、スクリーン1から移動方向Xに沿って出力される光が入射するように、スクリーン1から見て移動方向Xにおける照射部3とは反対側(第1の向きX1側)に配置されている。拡大レンズ41は、照射部3からの光によりスクリーン1に形成された画像を拡大し、第1ミラー42に出力する。第1ミラー42は、拡大レンズ41からの光を第2ミラー43に向けて反射する。第2ミラー43は、第1ミラー42からの光を、ウインドシールド101(図1参照)に向けて反射する。すなわち、投影光学系4は、照射部3からの光によってスクリーン1に形成される画像を、拡大レンズ41にて拡大し、ウインドシールド101に投影することで、対象空間400に虚像300を投影する。ここで、拡大レンズ41の光軸が、投影光学系4の光軸500となる。
制御部5は、例えば、CPU(Central Processing Unit)及びメモリを主構成とするマイクロコンピュータにて構成されている。言い換えれば、制御部5は、CPU及びメモリを有するコンピュータにて実現されており、CPUがメモリに格納されているプログラムを実行することにより、コンピュータが制御部5として機能する。プログラムは、ここでは制御部5のメモリに予め記録されているが、インターネット等の電気通信回線を通じて、又はメモリカード等の記録媒体に記録されて提供されてもよい。
制御部5は、駆動部2及び照射部3を制御することで、対象空間400に投影する虚像300の表示を制御する。制御部5は、第1制御信号で駆動部2を制御し、第2制御信号で照射部3を制御する。また、制御部5は、駆動部2の動作と照射部3の動作とを同期させるように構成されている。更に、制御部5は、図2に示すように、駆動制御部51及び表示制御部52としての機能を有している。
駆動制御部51は、駆動部2を制御することにより、可動スクリーン1aを基準位置に対して相対的に移動させる。ここでいう「基準位置」は、可動スクリーン1aの移動範囲における規定位置に設定された位置である。駆動制御部51は、可動スクリーン1aを透過する光により対象空間400に第1虚像301及び第2虚像302を投影するために可動スクリーン1aを移動させるのであり、照射部3による可動スクリーン1aへの描画と同期して駆動部2を制御する。
表示制御部52は、駆動制御部51と連携して、取得部6から取得した1以上の情報(「移動体情報」ともいう)に基づく内容の虚像300を表示するように、駆動部2及び照射部3を制御する。本実施形態では、虚像300(ここでは、第1虚像301)は、自動車100(移動体)の進行方向に幅を持ち、少なくとも自動車100が移動している路面600の属性情報を表す内容を含んでいる。
取得部6は、自動車100(移動体)の位置に関する情報(「位置情報」ともいう)、自動車100の周辺の物体に関する情報(「ADAS情報」ともいう)、及び自動車100の状態に関する情報(「車両情報」ともいう)のうち1以上の移動体情報を取得する。つまり、虚像300の内容に含まれる属性情報は、位置情報、ADAS情報、及び車両情報のうち1以上の情報に基づく情報である。
ADAS情報は、先進運転支援システム(ADAS:Advanced Driver Assistance System)の検出部であるカメラ、ソナーセンサ、レーダ、及びLiDAR(LightDetection and Ranging)等にて検出可能な情報である。本実施形態では、取得部6は、撮像装置71及びレーザーレーダ72を備えた検知システム7からADAS情報を取得する。撮像装置71は、対象空間400を含む自動車100の周辺の空間を撮像する。レーザーレーダ72は、自動車100の周辺の空間に存在する物体から自動車100までの距離、及び物体の性質などを計測する。ADAS情報の具体例としては、自動車100の周辺を移動中の車両までの移動体からの距離、この車両の自動車100に対する相対座標、複数の車両同士の車間距離、及びこれらの車両の相対速度等がある。ここで、ADAS情報における自動車100の周辺の物体は、自動車100の周辺にて走行中又は停車中の車両、ガードレール等の構造物の他、歩行者、及び小動物等を含んでいる。
車両情報は、自動車100自体のローカルな状態を表す情報であって、自動車100に搭載されたセンサにて検出可能な情報である。車両情報の具体例としては、自動車100の移動速度(走行速度)、自動車100にかかる加速度、アクセルペダルの踏込量(アクセル開度)、ブレーキペダルの踏込量、舵角、並びに自車の傾き、車両内のシートの傾き等がある。また、ドライバモニタで検出される運転者の脈拍、表情、及び視線等も車両情報に含まれる。更に、車幅、車高、全長、及びアイポイント等の、自動車100に固有のデータも、車両情報に含まれる。
位置情報は、自動車100の位置に基づく情報であって、自車位置における道路情報等、GPS(Global Positioning System)等の測位システムを用いて検出可能な情報である。位置情報の具体例としては、自車位置における道路の車線数、交差点か否か、丁字路か否か、一方通行か否か、車道幅、歩道の有無、勾配、及びカーブの曲率等がある。
(3)動作
以下、本実施形態の表示システム10の基本的な動作について説明する。制御部5は、照射部3を制御し、可動スクリーン1aに対して照射部3から光を照射する。このとき、可動スクリーン1aには、可動スクリーン1aの一面上を走査する光が照射部3から照射される。これにより、可動スクリーン1aには、画像が形成(投影)される。更に、照射部3からの光は可動スクリーン1aを透過し、投影光学系4からウインドシールド101に照射される。これにより、可動スクリーン1aに形成された画像は、自動車100の車室内であってウインドシールド101の下方から、ウインドシールド101に投影される。
以下、本実施形態の表示システム10の基本的な動作について説明する。制御部5は、照射部3を制御し、可動スクリーン1aに対して照射部3から光を照射する。このとき、可動スクリーン1aには、可動スクリーン1aの一面上を走査する光が照射部3から照射される。これにより、可動スクリーン1aには、画像が形成(投影)される。更に、照射部3からの光は可動スクリーン1aを透過し、投影光学系4からウインドシールド101に照射される。これにより、可動スクリーン1aに形成された画像は、自動車100の車室内であってウインドシールド101の下方から、ウインドシールド101に投影される。
投影光学系4からウインドシールド101に画像が投影されると、ウインドシールド101は、投影光学系4からの光を、車室内のユーザ200(運転者)に向けて反射する。これにより、ウインドシールド101で反射された画像が、ユーザ200に視認される。その結果、ユーザ200は、自動車100の前方(車外)に投影された虚像300(第1虚像301又は第2虚像302)を、ウインドシールド101越しに視認することができる。
具体的には、制御部5が、移動方向Xにおいて可動スクリーン1aを固定した状態で可動スクリーン1aの一面上に光を走査させることで、路面600に沿って奥行きを持ってユーザ200に視認される第1虚像301が形成される。また、制御部5が、可動スクリーン1aの一面における輝点から投影光学系4までのX方向の距離が一定となるように可動スクリーン1aを移動させながら、可動スクリーン1aの一面上に光を走査させる。この結果、ユーザ200から一定距離の路面600上に直立して視認される第2虚像302が形成される。
ここで、制御部5は、可動スクリーン1aに対して照射部3から光が照射されている期間において、駆動部2を制御し、可動スクリーン1aを移動方向Xに移動させる。可動スクリーン1aの一面における照射部3からの光の照射位置、つまり輝点の位置が同じ場合、可動スクリーン1aが第1の向きX1に移動すると、ユーザ200の目(アイポイント)から虚像300までの視距離は、短くなる。反対に、可動スクリーン1aの一面における輝点の位置が同じ場合に、可動スクリーン1aが第2の向きX2に移動すると、虚像300までの視距離は、長く(遠く)なる。つまり、虚像300までの視距離は移動方向Xにおける可動スクリーン1aの位置によって変化する。
例えば、第1虚像301の視距離を変更する場合には、制御部5は、視距離に応じて可動スクリーン1aをX方向に移動させ、移動後の位置で可動スクリーン1aを固定した状態にして可動スクリーン1aの一面上に光を走査させる。第2虚像302の視距離を変更する場合には、制御部5は、視距離に応じて可動スクリーン1aをX方向に移動させる。制御部5は、移動後の位置を基準にして輝点から投影光学系4までのX方向の距離が一定となるように可動スクリーン1aを移動させながら、可動スクリーン1aの一面上に光を走査させる。
また、制御部5は、照射部3を制御し、固定スクリーン1bに対して照射部3から光を照射する。このとき、固定スクリーン1bには、固定スクリーン1bの一面上を走査する光が照射部3から照射される。これにより、可動スクリーン1aに光を照射する場合と同様に、固定スクリーン1bには画像が形成(投影)され、ウインドシールド101に画像が投影される。その結果、ユーザ200は、自動車100の前方(車外)に投影された虚像300(第3虚像303)を、ウインドシールド101越しに視認することができる。ここで、第3虚像303は、位置が固定された固定スクリーン1bに投影された光で形成されるので、第3虚像303は、ユーザ200から所定の距離(例えば2~3m)の路面600上に直立して視認される。
本実施形態の表示システム10では、走査部32が可動スクリーン1aの縦方向(可動スクリーン1aの基準面503に対して傾斜した方向)に1往復する1周期の間に、第1虚像301、第2虚像302、及び第3虚像303の全てを投影可能である。具体的には、投影部40は、可動スクリーン1a、固定スクリーン1bの順に光を走査する「往路」において、まずは可動スクリーン1aに光を照射して第1虚像301を投影し、その後、固定スクリーン1bに光を照射して第3虚像303を投影する。それから、投影部40は、固定スクリーン1b、可動スクリーン1aの順に光を走査する「復路」において、まずは固定スクリーン1bに光を照射して第3虚像303を投影し、その後、可動スクリーン1aに光を照射して第2虚像302を投影する。
したがって、走査部32が縦方向に走査する1周期の間に、対象空間400には、第1虚像301、第3虚像303、及び第2虚像302が投影される。照射部3における縦方向の走査が比較的高速で行われることにより、ユーザ200においては、第1虚像301、第3虚像303、及び第2虚像302が同時に表示されているように視認される。照射部3における縦方向の走査の周波数は、一例として、60Hz以上である。
(4)虚像の内容
以下、本実施形態の表示システム10が対象空間400に投影する虚像300の内容例を列挙する。以下に説明する虚像300の内容例は、適宜組み合わせて適用可能である。また、以下に説明する虚像300は、第9内容例を除いて、ナビゲーションシステムの使用の有無に依らず、対象空間400に投影され得る。
以下、本実施形態の表示システム10が対象空間400に投影する虚像300の内容例を列挙する。以下に説明する虚像300の内容例は、適宜組み合わせて適用可能である。また、以下に説明する虚像300は、第9内容例を除いて、ナビゲーションシステムの使用の有無に依らず、対象空間400に投影され得る。
(4.1)第1内容例
第1内容例では、虚像300は、図4に示すように、マーカ310からなる。マーカ310は、第1虚像301であり、自動車100(移動体)の予測経路を表している。ここでいう「予測経路」は、ユーザ200が現在のハンドル操作を維持した場合に自動車100が走行すると予測される経路である。また、マーカ310は、特定領域A1(図4における破線参照。図5でも同様)において他の自動車110を避ける形状となっている。更に、マーカ310では、特定領域A1における他の自動車110との境界線が比較的太い線となっている。ここでは、特定領域A1は、自動車100の進行方向にあり、かつ、予測経路が他の自動車110と重なる領域である。そして、特定領域A1は、上記のように他の自動車110を避ける形状であり、かつ、他の自動車110との境界線が比較的太い線となっており、自動車100が特定領域A1に進入不可能であることを表している。つまり、本内容例では、虚像300の属性情報は、自動車100の進行方向にある特定領域A1に自動車100が進入可能か否かを表す情報である。
第1内容例では、虚像300は、図4に示すように、マーカ310からなる。マーカ310は、第1虚像301であり、自動車100(移動体)の予測経路を表している。ここでいう「予測経路」は、ユーザ200が現在のハンドル操作を維持した場合に自動車100が走行すると予測される経路である。また、マーカ310は、特定領域A1(図4における破線参照。図5でも同様)において他の自動車110を避ける形状となっている。更に、マーカ310では、特定領域A1における他の自動車110との境界線が比較的太い線となっている。ここでは、特定領域A1は、自動車100の進行方向にあり、かつ、予測経路が他の自動車110と重なる領域である。そして、特定領域A1は、上記のように他の自動車110を避ける形状であり、かつ、他の自動車110との境界線が比較的太い線となっており、自動車100が特定領域A1に進入不可能であることを表している。つまり、本内容例では、虚像300の属性情報は、自動車100の進行方向にある特定領域A1に自動車100が進入可能か否かを表す情報である。
本内容例では、虚像300は、例えば路面600が所定基準を満たす場合に表示される。所定基準は、例えば路面600が狭所区間であったり、工事現場が存在したりする等して、複数の自動車が並んで走行することのできない場合に満たされる。また、本内容例では、制御部5は、特定領域A1に自動車100が進入不可能である場合、図5に示すように、自動車100が特定領域A1を回避可能な推奨経路を表す内容のマーカ311(虚像300)を表示する。
以下、本内容例の虚像300を投影する場合の表示システム10の動作の一例について図6を用いて説明する。図6における「START」から「END」までの処理は、取得部6による取得周期(例えば、1秒間に30回)に合わせて繰り返される。まず、制御部5は、取得部6から1以上の移動体情報(例えば、自車位置における道路情報、自車の周辺の物体情報など)を取得する(ステップS101)。そして、制御部5は、取得した1以上の移動体情報に基づいて、対象空間400を模した疑似空間(仮想3D空間)を構築する(ステップS102)。
次に、制御部5は、自動車100が走行している路面600が所定基準を満たすか否かを判断する(ステップS103)。路面600が所定基準を満たさない場合(ステップS103:No)、路面600が狭所区間ではないため、制御部5は以降の処理を行わず、再びステップS101を実行する。一方、路面600が所定基準を満たす場合(ステップS103:Yes)、制御部5は、取得部6から取得した1以上の移動体情報(例えば、車幅、舵角、方位情報など)に基づいて、疑似空間に予測経路を描画する(ステップS104)。
次に、制御部5は、予測経路上に物体が存在するか否かを判断する(ステップS105)。予測経路上に物体(例えば、他の自動車110)が存在する場合(ステップS105:Yes)、制御部5は、擬似空間に進入不可情報を描画する(ステップS106)。進入不可情報は、自動車100が特定領域A1に進入不可能であることを表す情報である。そして、制御部5は、物体を回避可能な経路が存在する場合、擬似空間に推奨経路を描画する(ステップS107)。その後、制御部5は、駆動部2及び照射部3を制御することにより、擬似空間に描画した内容を、虚像300として対象空間400に投影させる(ステップS108)。これにより、予測経路を表すマーカ310、及び推奨経路を表すマーカ311が対象空間400における路面600に投影される。
一方、予測経路上に物体が存在しない場合(ステップS105:No)、制御部5は、対象空間400に物体が存在するか否かを判断する(ステップS109)。対象空間400に物体が存在する場合(ステップS109:Yes)、制御部5は、疑似空間に推奨経路を描画した上で(ステップS107)、ステップS108を実行する。一方、対象空間400に物体が存在しない場合(ステップS109:No)、制御部5は、疑似空間に推奨経路を描画せずにステップS108を実行する。
ステップS109の処理が実行される状況について説明する。例えば、対象空間400にマーカ311が投影された後に、ユーザ200がマーカ311に従ってハンドルを操作すると、予測経路が変化する。そして、予測経路が推奨経路に略一致すると、予測経路上には物体が存在しなくなる。この状況において、対象空間400に物体が存在する場合(ここでは、自動車100の前方に他の自動車110が存在する場合)、マーカ311が対象空間400に投影され続ける。一方、自動車100が他の自動車110の横を通過する等して対象空間400に物体が存在しなくなると、マーカ311が対象空間400に投影されなくなる。
上述のように、本内容例では、自動車100の進行方向にある特定領域A1に自動車100が進入可能であるか否かを表す内容の虚像300が対象空間400に投影される。このため、ユーザ200が虚像300を視認することにより、自動車100の進行方向を変更する必要があるか否かを判断し易い、という利点がある。また、本内容例では、特定領域A1に自動車100が進入不可能な場合に、回避経路を表す内容の虚像300が対象空間400に投影される。このため、ユーザ200が虚像300を視認することにより、進入不可能な特定領域A1を回避するという選択をユーザ200が採り易い、という利点がある。
本内容例において、制御部5による処理のうちステップS101,S102の処理は、ステップS103の処理前ではなく、ステップS103の処理後に実行してもよい。この場合、ステップS101,S102の処理は、路面600が所定基準に合致した場合のみに実行される。
本内容例において、マーカ310における特定領域A1の色は、特定領域A1に自動車100が進入不可能な場合、特定領域A1以外の部分と色が異なっていてもよい。この態様では、自動車100が特定領域A1へ進入できないことをユーザ200に知覚させ易い。
本内容例において、制御部5は、物体を回避可能な経路が存在しない場合、自動車100の停止を表す内容の虚像300を対象空間400に投影させてもよい。この態様では、自動車100を停止すべきことをユーザ200に知覚させ易い。
(4.2)第2内容例
第2内容例では、虚像300は、図7A及び図7Bに示すように、自動車100(移動体)が走行している第1車線601から他の車線602へ車線変更する状況で対象空間400に投影される。図7Aは、自動車100が加速又は減速を行わずに車線変更することが可能な路面600の状況を示している。また、図7Bは、他の自動車110が自動車100と並走しており、自動車100が加速を行わないと車線変更できない路面600の状況を示している。
第2内容例では、虚像300は、図7A及び図7Bに示すように、自動車100(移動体)が走行している第1車線601から他の車線602へ車線変更する状況で対象空間400に投影される。図7Aは、自動車100が加速又は減速を行わずに車線変更することが可能な路面600の状況を示している。また、図7Bは、他の自動車110が自動車100と並走しており、自動車100が加速を行わないと車線変更できない路面600の状況を示している。
図7Aに示す状況において、ユーザ200が車線変更すべく方向指示器を操作すると、図8に示すように、2つのマーカ312,313からなる虚像300が対象空間400に投影される。マーカ312は、第1虚像301であり、自動車100が走行している第1車線601とは異なる第2車線602にある特定領域A1を表している。特定領域A1は、自動車100が進入可能である場合(つまり、車線変更が可能な場合)と、そうでない場合とで色(又は形状)が変化する。マーカ313は、第1虚像301であり、ユーザ200に車線変更を促すための複数(ここでは、2つ)の矢印を表している。マーカ313は、自動車100が進入可能である場合にのみ対象空間400に投影される。
図7Aに示す状況において、ユーザ200が方向指示器を操作すると、制御部5は、取得部6から取得した1以上の移動体情報(例えば、車速、自車の周辺の物体情報など)に基づいて、自動車100が特定領域A1へ進入可能であるか否かを判断する。ここでは、制御部5は、移動体情報の1つとして、BSM(Blind Spot Monitor)システムによる検知情報も用いている。図7Aにおける網掛け線は、BSMシステムの検知エリアを表している。
一方、図7Bに示す状況において、ユーザ200が車線変更すべく方向指示器を操作すると、図9に示すように、3つのマーカ312,313,314からなる虚像300が対象空間400に投影される。マーカ314は、第1虚像301であり、ユーザ200に加速又は減速(ここでは、加速)を促すための複数(ここでは、3つ)の矢印を表している。
図7Bに示す状況において、ユーザ200が方向指示器を操作すると、制御部5は、取得部6から取得した1以上の移動体情報に基づいて、自動車100が加速又は減速することで特定領域A1へ進入可能であるか否かを判断する。ここでは、制御部5は、移動体情報として、例えば車速、自車の周辺の物体情報、他の自動車110との相対速度などの情報を用いている。もちろん、制御部5は、BSMシステムによる検知情報を用いてもよい。
つまり、本内容例においても、第1内容例と同様に、虚像300の属性情報は、自動車100の進行方向にある特定領域A1に自動車100が進入可能か否かを表す情報である。また、本内容例では、特定領域A1は、自動車100が移動する車線(第1車線601)とは異なる車線(第2車線602)にある。
以下、本内容例の虚像300を投影する場合の表示システム10の動作の一例について図10を用いて説明する。図10における「START」から「END」までの処理は、取得部6による取得周期(例えば、1秒間に30回)に合わせて繰り返される。まず、制御部5は、取得部6から1以上の移動体情報を取得する(ステップS201)。そして、制御部5は、取得した1以上の移動体情報に基づいて、対象空間400を模した疑似空間(仮想3D空間)を構築する(ステップS202)。
次に、制御部5は、方向指示器が動作中であるか否かを判断する(ステップS203)。方向指示器が動作中でない場合(ステップS203:No)、ユーザ200に車線変更の意思がないので、制御部5は以降の処理を行わず、再びステップS201を実行する。一方、方向指示器が動作中である場合(ステップS203:Yes)、制御部5は、取得部6から取得した1以上の移動体情報に基づいて、第2車線602に進入可能な特定領域A1が存在するか否かを判断する(ステップS204)。
第2車線602に進入可能な特定領域A1が存在する場合(ステップS204:Yes)、制御部5は、疑似空間の第2車線602に進入可能な特定領域A1を描画する(ステップS205)。また、制御部5は、疑似空間の第1車線601に車線変更を促す情報を描画する(ステップS206)。その後、制御部5は、駆動部2及び照射部3を制御することにより、擬似空間に描画した内容を、虚像300として対象空間400に投影させる(ステップS207)。これにより、対象空間400において、特定領域A1を表すマーカ312が第2車線602に、車線変更を促すためのマーカ313が第1車線601に投影される。
一方、第2車線602に進入可能な特定領域A1が存在しない場合(ステップS04:No)、制御部5は、自動車100の加速又は減速により、進入可能な特定領域A1が発生するか否かを判断する(ステップS208)。進入可能な特定領域A1が発生する場合(ステップS208:Yes)、制御部5は、疑似空間の第2車線602に進入可能な特定領域A1を描画する(ステップS209)。また、制御部5は、疑似空間の第1車線601に車線変更を促す情報、及び加速又は減速を促す情報を描画する(ステップS210)。その後、制御部5は、駆動部2及び照射部3を制御することにより、擬似空間に描画した内容を、虚像300として対象空間400に投影させる(ステップS207)。これにより、対象空間400において、特定領域A1を表すマーカ312が第2車線602に、車線変更を促すためのマーカ313、及び加速又は減速を促すためのマーカ314が第1車線601に投影される。
一方、進入可能な特定領域A1が発生しない場合(ステップS208:No)、制御部5は、擬似空間に進入不可情報を描画する(ステップS211)。進入不可情報は、自動車100が特定領域A1に進入不可能であること(つまり、車線変更できないこと)を表す情報である。その後、制御部5は、駆動部2及び照射部3を制御することにより、擬似空間に描画した内容を、虚像300として対象空間400に投影させる(ステップS207)。これにより、対象空間400において、進入不可能な特定領域A1を表すマーカ312が第2車線602に投影される。
上述のように、本内容例では、第2車線602にある特定領域A1に自動車100が進入可能であるか否かを表す内容の虚像300が対象空間400に投影される。このため、ユーザ200が虚像300を視認することにより、車線変更をするか否かを判断し易い、という利点がある。
本内容例において、制御部5による処理のうちステップS201,S202の処理は、ステップS203の処理前ではなく、ステップS203の処理後に実行してもよい。この場合、ステップS201,S202の処理は、方向指示器が動作中と判断された場合のみに実行される。
ところで、本内容例の虚像300は、例えば路肩に自動車100を駐車する状況において対象空間400に投影されてもよい。路肩に自動車100を駐車しようとする場合も、車線変更の場合と同様に、ユーザ200が方向指示器を操作するからである。この場合、特定領域A1は、第2車線602ではなく、第1車線601の路肩に存在することになる。
(4.3)第3内容例
第3内容例では、虚像300は、図11A及び図11Bに示すように、マーカ315からなる。マーカ315は、矢印状の第1虚像301であり、自動車100(移動体)が走行している路面600の勾配を表している。図11Aでは、マーカ315は、矢印のシャフトが手前側から奥側に向かうにつれて細くなる形状であり、かつ、「UP」の文字列を有している。図11Aでは、マーカ315は、路面600が上り勾配610であることを表している。図11Bでは、マーカ315は、矢印のシャフトが手前側から奥側に向かうにつれて太くなる形状であり、かつ、「DOWN」の文字列を有している。図11Bでは、マーカ315は、路面600が下り勾配611であることを表している。つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600の勾配を表す情報である。
第3内容例では、虚像300は、図11A及び図11Bに示すように、マーカ315からなる。マーカ315は、矢印状の第1虚像301であり、自動車100(移動体)が走行している路面600の勾配を表している。図11Aでは、マーカ315は、矢印のシャフトが手前側から奥側に向かうにつれて細くなる形状であり、かつ、「UP」の文字列を有している。図11Aでは、マーカ315は、路面600が上り勾配610であることを表している。図11Bでは、マーカ315は、矢印のシャフトが手前側から奥側に向かうにつれて太くなる形状であり、かつ、「DOWN」の文字列を有している。図11Bでは、マーカ315は、路面600が下り勾配611であることを表している。つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600の勾配を表す情報である。
本内容例では、虚像300は、例えば自動車100が勾配の手前に位置するときから、勾配の無い路面600に到達するまでの間、表示される。具体的には、制御部5は、取得部6から取得した1以上の移動体情報(例えば、自車位置における道路情報、車速、自車の傾き等)に基づいて、マーカ315が対象空間400における路面600に重畳して投影されるように、虚像300の表示を制御する。
上述のように、本内容例では、自動車100が走行している路面600の勾配を表す内容の虚像300が対象空間400に投影される。したがって、ユーザ200は、虚像300を視認することにより、路面600が上り勾配610であるか下り勾配611であるかを把握し、路面600の勾配に応じた運転を行い易い、という利点がある。特に、本内容例の虚像300は、例えば路面600の構造又は風景により、ユーザ200が勾配があることに気付き難い場合に有効である。例えば、ユーザ200が上り勾配610であることに気付かずに運転している場合、自動車100が自然に減速することにより、渋滞を招く可能性がある。また、例えば、ユーザ200が下り勾配611であることに気付かずに運転している場合、自動車100が自然に加速することにより、前方の他の自動車との間の距離が必要以上に狭まる可能性がある。このような場合でも、ユーザ200は、虚像300を視認することにより、適切な加速又は減速を行うことが可能である。
図11A及び図11Bに示すマーカ315は、それぞれ「UP」及び「DOWN」の文字列を有しているが、これに限定する趣旨ではない。例えば、図11A及び図11Bに示すマーカ315は、いずれも文字列を有していなくてもよい。また、図11A及び図11Bに示すマーカ315は、静止画像ではなく、動画像で構成されていてもよい。例えば、図11Aに示すマーカ315は、時間経過に伴って手前側に向かうように波打つ動画像であってもよい。また、例えば、図11Bに示すマーカ315は、時間経過に伴って奥側に向かうように波打つ動画像であってもよい。
ここで、虚像300の属性情報は、自動車100の勾配に対する位置に応じて変化するのが好ましい。具体的には、制御部5は、取得部6から取得した1以上の移動体情報に基づいて、前方の路面600の傾斜、及び傾斜が変化する座標を事前に算出する。そして、制御部5は、算出した座標を起点として、マーカ315の形状(ここでは、矢印のシャフトの形状)を、勾配の傾斜角度に応じて変化させる。
以下、自動車100が上り勾配610を走行するときの虚像300の具体例について図12A~図14Bを用いて説明する。先ず、図12Aに示すように、自動車100が上り勾配610に差し掛かると、図12Bに示すようなマーカ315が対象空間400に投影される。このマーカ315では、上り勾配610の開始位置を境目として、手前側のマーカ315Aと奥側のマーカ315Bとで矢印のシャフトの幅、及び幅の変化率が異なっている。その後、図13A及び図14Aに示すように、自動車100が上り勾配610を走行し始めると、図13B及び図14Bに示すようなマーカ315が対象空間400に投影される。これらのマーカ315では、自動車100の傾きが上り勾配610の傾斜角度に近付くにつれて、矢印のシャフトの幅が細くなっている。
上述のように、自動車100の勾配に対する位置に応じて虚像300が変化する場合、ユーザ200は、虚像300を視認することにより、自動車100が勾配に差し掛かる前に、勾配があることを認識することが可能である。また、この構成では、ユーザ200が虚像300を認識することにより、路面600の傾斜を意識しながら運転し易い、という利点がある。
本内容例において、例えば図15Aに示すように、マーカ315の他に補助マーカ316を対象空間400に投影させてもよい。補助マーカ316は、第1虚像301であり、上向きに凸となるアーチを描く矢印状である。図15Aに示す例では、補助マーカ316は、路面600が下り勾配611であることを表している。この場合、ユーザ200がマーカ315だけではなく、補助マーカ316も視認することにより、路面600の勾配をより直感的に認識し易い、という利点がある。
また、本内容例において、例えば図15Bに示すように、マーカ315は、一部の透過率、又は色を変更することにより、一部が透けて見えるような形で対象空間400に投影されてもよい。図15Bに示す例では、マーカ315のうち下り勾配611に延びている部分は、路面600を透過しているような形で表されている。この場合も、ユーザ200がマーカ315を視認することにより、路面600の勾配をより直感的に認識し易い、という利点がある。
また、本内容例では、虚像300として矢印状のマーカ315が対象空間400に投影されるが、これに限定する趣旨ではない。例えば、図16に示すように、路面600における制限速度(ここでは、時速50キロメートル)を表す標識のマーカ315が、虚像300として対象空間400に投影されてもよい。この場合、ユーザ200がマーカ315を視認することにより、路面600の勾配と、路面600における制限速度という2つの情報を認識し易い、という利点がある。その他、マーカ315は、例えば標識以外のアイコンで構成されていてもよいし、「勾配あり」等の文字列で構成されていてもよい。つまり、マーカ315は、少なくとも路面600の勾配を表す態様であればよい。
(4.4)第4内容例
第4内容例では、虚像300は、図17Aに示すように、2つのマーカ317A,317Bからなるマーカ317で構成されている。マーカ317Aは、第1虚像301であり、自動車100(移動体)の予測経路を表している。マーカ317Bは、第1虚像301であり、かつ、自動車100が走行している道路の名称(ここでは、国道□□□)を表しており、マーカ317Aに重ねて投影される。つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600を含む道路の名称を表す情報である。
第4内容例では、虚像300は、図17Aに示すように、2つのマーカ317A,317Bからなるマーカ317で構成されている。マーカ317Aは、第1虚像301であり、自動車100(移動体)の予測経路を表している。マーカ317Bは、第1虚像301であり、かつ、自動車100が走行している道路の名称(ここでは、国道□□□)を表しており、マーカ317Aに重ねて投影される。つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600を含む道路の名称を表す情報である。
本内容例では、虚像300は、例えば自動車100の運転中においては常に表示される。具体的には、制御部5は、取得部6から取得した1以上の移動体情報(例えば、舵角、自車位置における道路情報など)に基づいて、マーカ317が対象空間400における路面600に重畳して投影されるように、虚像300の表示を制御する。
上述のように、本内容例では、自動車100が走行している道路の名称を表す内容の虚像300が対象空間400に投影される。したがって、ユーザ200は、虚像300を視認することにより、自身がどこに向かっているかを把握しながら運転し易い、という利点がある。
本内容例では、マーカ317Bが表す道路の名称は国道であるが、県道、府道、市道などであってもよい。また、本内容例では、マーカ317Bが表す道路の名称は、例えば図17Bに示すように線(ここでは、○○線)であってもよいし、筋、通り、街道、バイパス等であってもよい。
また、本内容例では、マーカ317Bは、例えば図18に示すように、自動車100が走行している方面(ここでは、△△方面)を表していてもよい。つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600を含む道路の方面を表す情報であってもよい。この場合、自動車100が走行している車線(第1車線601)の方面を表すマーカ317だけではなく、他の車線(第2車線602)の方面(ここでは、××方面)を表すマーカ317も対象空間400に投影されてもよい。
(4.5)第5内容例
第5内容例では、虚像300は、図19に示すように複数(ここでは、3つ)のマーカ318からなり、かつ、動画像である。本内容例では、複数のマーカ318は、いずれも自動車100の進行方向に幅を持つ第1虚像301ではなく、ユーザ200から一定距離の路面600上に直立して視認される第2虚像302である。ただし、本内容例では、虚像300は、複数のマーカ318が動画像として対象空間400に投影されることにより、全体としては自動車100の進行方向に幅を持った画像としてユーザ200に視認される。以下では、3つのマーカ318のうち最も手前にあるマーカ318を「マーカ318A」、最も奥にあるマーカ318を「マーカ318C」、マーカ318A,318Cの間にあるマーカを「マーカ318B」ともいう。
第5内容例では、虚像300は、図19に示すように複数(ここでは、3つ)のマーカ318からなり、かつ、動画像である。本内容例では、複数のマーカ318は、いずれも自動車100の進行方向に幅を持つ第1虚像301ではなく、ユーザ200から一定距離の路面600上に直立して視認される第2虚像302である。ただし、本内容例では、虚像300は、複数のマーカ318が動画像として対象空間400に投影されることにより、全体としては自動車100の進行方向に幅を持った画像としてユーザ200に視認される。以下では、3つのマーカ318のうち最も手前にあるマーカ318を「マーカ318A」、最も奥にあるマーカ318を「マーカ318C」、マーカ318A,318Cの間にあるマーカを「マーカ318B」ともいう。
本内容例では、虚像300は、自動車100が所定値以上の曲率を有するカーブ603の手前に進入したときに、対象空間400に投影される。具体的には、制御部5は、取得部6で取得した1以上の移動体情報(例えば、自車位置における道路情報)に基づいて、自動車100の前方にカーブ603が存在するか否かを判断する。そして、制御部5は、自動車100の前方にカーブ603が存在すると判断した場合、対象空間400におけるカーブ603の上方(図19におけるガードレールの上方)に、3つのマーカ318が投影されるように虚像300の表示を制御する。ここでは、カーブ603が自動車100から見て左向きに曲がっているので、3つのマーカ318は、いずれも左向きの矢印の図形を含むアイコンとして対象空間400に投影される。もちろん、カーブ603が自動車100から見て右向きに曲がっている場合、3つのマーカ318は、いずれも右向きの矢印の図形を含むアイコンとして対象空間400に投影される。
このとき、制御部5は、所定の間隔(例えば、1フレーム~数フレーム)で、マーカ318A、マーカ318B、マーカ318C、マーカ318A、…の順に3つのマーカ318が投影されるように虚像300の表示を制御する。また、3つのマーカ318は、自動車100から離れるにしたがって(つまり、視距離が長くなるにつれて)、アイコンが左方へ移動するように、かつ、アイコンの大きさが小さくなるように対象空間400に投影される。したがって、ユーザ200においては、3つのマーカ318は、カーブ603に沿って滑らかに動いているように視認される。
上述のように、本内容例では、自動車100が所定値以上の曲率を有するカーブ603の手前に進入したときに、虚像300が動画像として対象空間400に投影される。したがって、ユーザ200は、虚像300を視認することにより、路面600の奥行きの変化、カーブ603の曲率、及びカーブ603の向きを直感的に把握しながら運転し易い、という利点がある。特に、虚像300は、昼間よりもユーザ200が距離感をつかみ難い夜間において有効である。すなわち、ユーザ200は、前方が暗いためにカーブ603の存在に気付かない場合でも、虚像300を視認することにより、カーブ603の存在に気付くことが可能である。
また、本内容例では、虚像300が動画像であるため、複数のマーカ318を1フレームに1つずつ投影することが可能である。ここで、表示システム10が複数のマーカ318を1フレームに同時に投影する構成である場合、表示システム10の容積が大きくなることで、自動車100に搭載できなくなる可能性がある。一方、本内容例によれば、表示システム10が複数のマーカ318を1フレームに1つずつ投影する構成であるので、表示システム10の容積が大きくなり難く、結果として自動車100に搭載できなくなる可能性を低減することができる、という利点がある。また、本内容例によれば、虚像300が静止画像である場合と比較して、虚像300が表す路面600の状況にユーザ200が注視し易い、という利点がある。
ところで、本内容例では、虚像300は、対象空間400におけるカーブ603の上方に投影されているが、これに限定する趣旨ではない。例えば、虚像300は、対象空間400における路面600に重畳するように投影されてもよい。この場合、複数のマーカ318は、いずれも第1虚像301として対象空間400に投影されてもよい。
(4.6)第6内容例
第6内容例では、虚像300は、図20に示すように、2つのマーカ319A,319Bからなる。以下、2つのマーカ319A,319Bを特に区別しない場合、2つのマーカ319A,319Bの各々を「マーカ319」と呼ぶこともある。マーカ319Aは、第1虚像301であり、自動車100(移動体)が走行している路面600と繋がっている他の路面604であって、自動車100が進入可能な他の路面604を表している。ここでは、他の路面604は、高速道路の入口である。マーカ319Bは、第2虚像302であり、マーカ319Aが示す他の路面604の行き先を表している。ここでは、マーカ319Bは、高速道路を模式的に表すアイコンであり、マーカ319Aに重ねて投影される。
第6内容例では、虚像300は、図20に示すように、2つのマーカ319A,319Bからなる。以下、2つのマーカ319A,319Bを特に区別しない場合、2つのマーカ319A,319Bの各々を「マーカ319」と呼ぶこともある。マーカ319Aは、第1虚像301であり、自動車100(移動体)が走行している路面600と繋がっている他の路面604であって、自動車100が進入可能な他の路面604を表している。ここでは、他の路面604は、高速道路の入口である。マーカ319Bは、第2虚像302であり、マーカ319Aが示す他の路面604の行き先を表している。ここでは、マーカ319Bは、高速道路を模式的に表すアイコンであり、マーカ319Aに重ねて投影される。
つまり、本内容例では、虚像300の属性情報は、自動車100が移動している路面600と繋がっている他の路面604のうち、自動車100が進入可能な他の路面604を表す情報である。したがって、図20では図示していないが、路面600と繋がっている他の路面604であっても、自動車100が進入不可能な他の路面604(例えば、一方通行の路面)には、マーカ319が投影されない。
本内容例では、虚像300は、例えば自動車100の運転中においては常に表示される。具体的には、制御部5は、取得部6から取得した1以上の移動体情報(例えば、自車位置における道路情報など)に基づいて、マーカ319が対象空間400における他の路面604に重畳して投影されるように、虚像300の表示を制御する。
上述のように、本内容例では、自動車100が走行している路面600と繋がっている進入可能な他の路面604を表す内容の虚像300が対象空間400に投影される。したがって、ユーザ200は、虚像300を視認することにより、自動車100の現在の経路とは異なる他の経路を考慮しながら運転し易い、という利点がある。例えば、ユーザ200は、虚像300を視認することにより高速道路の入口があることを認識すると、一般道を走行するか、高速道路を走行するか等、経路の選択が可能となる、という利点がある。
本内容例において、自動車100が進入可能な他の路面604は、例えば駐車場の入口、店舗の入口などである。また、本内容例では、自動車100が進入可能な他の路面604の行き先を示すマーカ319Bが対象空間400に投影されているが、マーカ319Bは投影されなくてもよい。
(4.7)第7内容例
第7内容例では、虚像300は、図21に示すように複数のマーカ320からなる。複数のマーカ320の各々は、自動車100(移動体)の進行方向に沿った向きの矢印として、対象空間400に投影される。複数のマーカ320は、ユーザ200に視認されることにより、ユーザ200に加速していると錯覚させ、自動車100の車速が実際の車速よりも速いとユーザ200に錯覚させる効果を奏し得る。つまり、本内容例では、虚像300の内容は、自動車100を運転しているユーザ200に加速していると錯覚させる情報である。
第7内容例では、虚像300は、図21に示すように複数のマーカ320からなる。複数のマーカ320の各々は、自動車100(移動体)の進行方向に沿った向きの矢印として、対象空間400に投影される。複数のマーカ320は、ユーザ200に視認されることにより、ユーザ200に加速していると錯覚させ、自動車100の車速が実際の車速よりも速いとユーザ200に錯覚させる効果を奏し得る。つまり、本内容例では、虚像300の内容は、自動車100を運転しているユーザ200に加速していると錯覚させる情報である。
本内容例では、虚像300は、例えば自動車100の車速が閾値速度(ここでは、自動車100が走行している道路の制限速度)を超えると表示される。具体的には、制御部5は、取得部6から取得した1以上の移動体情報(例えば、自車位置における道路情報、自車の車速など)に基づいて、複数のマーカ320が対象空間400における路面600に重畳して投影されるように、虚像300の表示を制御する。
上述のように、本内容例では、例えば自動車100の車速が制限速度を超えると、ユーザ200に加速していると錯覚させる虚像300が対象空間400に投影される。したがって、ユーザ200は、虚像300を視認することにより、現在の車速が速すぎると認識し、ブレーキを踏む等して現在の車速を落とすことを試みる。つまり、本内容例によれば、ユーザ200に虚像300を視認させることにより、現在の車速を制限速度以下に抑えるようにユーザ200に促すことが可能である、という利点がある。
ここで、自動車100が制限速度を超過したときに警告音を鳴動する構成を備えている場合、警告音が頻繁に鳴動されることでユーザ200に不快感を与える可能性がある。一方、本内容例では、警告音の鳴動の代わりに虚像300を表示することにより、ユーザ200に不快感を与える可能性を低減することができる、という利点がある。また、例えばトンネル等の特定の道路においては、ユーザ200に加速していると錯覚させるためのペイントを施している場合があるが、このようなペイントが施されている場所は限定されている。一方、本内容例によれば、上記のペイントの有無に依らず、いつでもユーザ200に加速していると錯覚させることが可能である、という利点がある。
本内容例において、虚像300は、上述の複数のマーカ320に限らず、他の態様であってもよい。つまり、虚像300は、ユーザ200に加速していると錯覚させることが可能な態様であればよい。
(4.8)第8内容例
第8内容例では、虚像300は、図22に示すように、2つのマーカ321A,321Bからなるマーカ321で構成されている。マーカ321Aは、第1虚像301であり、自動車100(移動体)が実際に走行した過去の経路を表している。ここでは、例えばサーキット、通勤時に通る経路などのように、現在の経路と過去の経路とで出発位置及び目的位置が同じであり、かつ、自動車100が走行する道路が同じであると仮定する。マーカ321Bは、第1虚像301であり、出発位置から現在位置までに現在の経路で要した時間と、過去の経路で要した時間との差分を表している。ここでは、現在の経路での所要時間が過去の経路での所要時間を0.5秒上回っているため、「+0.5s」という文字列からなるマーカ321Bがマーカ321Aに重ねて投影される。つまり、本内容例では、虚像300の内容は、現在の自動車100が移動している経路と出発位置及び目的位置が同じであり、かつ自動車100が移動する道路が同じである過去の経路を表す情報である。
第8内容例では、虚像300は、図22に示すように、2つのマーカ321A,321Bからなるマーカ321で構成されている。マーカ321Aは、第1虚像301であり、自動車100(移動体)が実際に走行した過去の経路を表している。ここでは、例えばサーキット、通勤時に通る経路などのように、現在の経路と過去の経路とで出発位置及び目的位置が同じであり、かつ、自動車100が走行する道路が同じであると仮定する。マーカ321Bは、第1虚像301であり、出発位置から現在位置までに現在の経路で要した時間と、過去の経路で要した時間との差分を表している。ここでは、現在の経路での所要時間が過去の経路での所要時間を0.5秒上回っているため、「+0.5s」という文字列からなるマーカ321Bがマーカ321Aに重ねて投影される。つまり、本内容例では、虚像300の内容は、現在の自動車100が移動している経路と出発位置及び目的位置が同じであり、かつ自動車100が移動する道路が同じである過去の経路を表す情報である。
本内容例では、虚像300は、例えば自動車100の運転開始時から表示される。具体的には、制御部5は、過去の経路のうち出発位置から目的位置までの所要時間の最も短い過去の経路を記録している。そして、制御部5は、自動車100の運転が開始されると、マーカ321Aが対象空間400における路面600に重畳して投影されるように、虚像300の表示を制御する。マーカ321Aに含まれる情報は、取得部6から取得した1以上の移動体情報(例えば、自車位置における道路情報など)に基づく情報である。また、制御部5は、出発位置から現在位置までに現在の経路で要した時間と、過去の経路で要した時間とをリアルタイムに比較し、マーカ321Bがマーカ321Aに重なって投影されるように、虚像300の表示を制御する。その後、制御部5は、自動車100が目的位置に到達すると、出発位置から目的位置までの現在の経路で要した時間が過去の経路で要した時間よりも短い場合、現在の経路を過去の経路として記録する。
上述のように、本内容例では、例えばユーザ200が自動車100の運転を開始すると、過去の経路を表す内容の虚像300が対象空間400に投影される。このため、本内容によれば、ユーザ200が虚像300を視認して現在の経路と過去の経路とを比較することで、ユーザ200が目的位置までの最適な経路を模索しながら運転することが可能である、という利点がある。
ところで、自動車100の運転開始時に本内容例の虚像300の投影を開始するか否かは任意である。例えば、休日のドライブ等、通勤時とは異なる経路で自動車100を走行させる場合には、過去の経路との比較が意味をなさない。このような場合、表示システム10が本内容例の虚像300を対象空間400に投影させる必要がない。
(4.9)第9内容例
第9内容例では、虚像300は、図23に示すように、マーカ322と、2つのマーカ323A,323Bからなるマーカ323と、で構成されている。マーカ322は、第1虚像301であり、ナビゲーションシステムによる現在の案内経路を表している。マーカ323Aは、第1虚像301であり、ナビゲーションシステムによる再検索後の案内経路を表している。マーカ323Bは、第1虚像301であり、現在位置から目的位置までに現在の案内経路で要すると推測される時間と、再検索後の案内経路で要すると推測される時間との差分を表している。ここでは、再検索後の案内経路で推測される所要時間が、現在の案内経路で推測される所要時間よりも5分短くなるため、「-5min」という文字列からなるマーカ323Bがマーカ323Aに重ねて投影される。つまり、本内容例では、虚像300の内容は、ナビゲーションシステムによる現在の案内経路と、再検索後の案内経路を表す情報である。
第9内容例では、虚像300は、図23に示すように、マーカ322と、2つのマーカ323A,323Bからなるマーカ323と、で構成されている。マーカ322は、第1虚像301であり、ナビゲーションシステムによる現在の案内経路を表している。マーカ323Aは、第1虚像301であり、ナビゲーションシステムによる再検索後の案内経路を表している。マーカ323Bは、第1虚像301であり、現在位置から目的位置までに現在の案内経路で要すると推測される時間と、再検索後の案内経路で要すると推測される時間との差分を表している。ここでは、再検索後の案内経路で推測される所要時間が、現在の案内経路で推測される所要時間よりも5分短くなるため、「-5min」という文字列からなるマーカ323Bがマーカ323Aに重ねて投影される。つまり、本内容例では、虚像300の内容は、ナビゲーションシステムによる現在の案内経路と、再検索後の案内経路を表す情報である。
本内容例では、虚像300は、例えば現在の案内経路にて渋滞が発生する等して、ユーザ200がナビゲーションシステムにより目的位置までの案内経路を再検索するときに表示される。具体的には、制御部5は、取得部6から取得した1以上の移動体情報(例えば、自車位置における道路情報など)に基づいて、マーカ321,322が路面600に投影されるように、虚像300の表示を制御する。ここでは、路面600のうち渋滞が発生している第1車線601にマーカ321が投影され、第1車線601から分岐する第2車線602にマーカ322が投影される。
上述のように、本内容例では、ユーザ200がナビゲーションシステムにより目的位置までの案内経路を再検索すると、現在の案内経路と再検索後の案内経路とを表す内容の虚像300が対象空間400に投影される。このため、本内容によれば、ユーザ200が虚像300を視認して現在の案内経路と再検索後の案内経路とを比較することにより、ユーザ200が再検索後の案内経路のメリット(又はデメリット)を把握し易い、という利点がある。
(5)変形例
上記実施形態は、本開示の様々な実施形態の一つに過ぎない。上記実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、表示システム10と同様の機能は、表示システム10の制御方法、コンピュータプログラム、又はプログラムを記録した記録媒体等で具現化されてもよい。
上記実施形態は、本開示の様々な実施形態の一つに過ぎない。上記実施形態は、本開示の目的を達成できれば、設計等に応じて種々の変更が可能である。また、表示システム10と同様の機能は、表示システム10の制御方法、コンピュータプログラム、又はプログラムを記録した記録媒体等で具現化されてもよい。
一態様に係る表示システム10の制御方法は、投影部40と、制御部5と、を備える表示システム10の制御方法である。投影部40は、対象空間400に虚像300を投影する。制御部5は、虚像300の表示を制御する。表示システム10の制御方法は、移動体(ここでは、自動車100)の進行方向に幅を持ち、少なくとも移動体が移動している路面600の属性情報を表す内容の虚像300を表示する。
また、一態様に係るプログラムは、コンピュータシステムに、上記の表示システム10の制御方法を実行させるためのプログラムである。
本開示における表示システム10又は制御方法の実行主体は、コンピュータシステムを含んでいる。コンピュータシステムは、ハードウェアとしてのプロセッサ及びメモリを主構成とする。コンピュータシステムのメモリに記録されたプログラムをプロセッサが実行することによって、本開示におけるシステム又は方法の実行主体としての機能が実現される。プログラムは、コンピュータシステムのメモリに予め記録されていてもよいが、電気通信回線を通じて提供されてもよい。また、プログラムは、コンピュータシステムで読み取り可能なメモリカード、光学ディスク、ハードディスクドライブ等の非一時的な記録媒体に記録されて提供されてもよい。コンピュータシステムのプロセッサは、半導体集積回路(IC)又は大規模集積回路(LSI)を含む1つまたは複数の電子回路で構成される。複数の電子回路は、1つのチップに集約されていてもよいし、複数のチップに分散して設けられていてもよい。複数のチップは、1つの装置に集約されていてもよいし、複数の装置に分散して設けられていてもよい。
また、表示システム10の制御部5の機能は、複数のシステム(装置)に分散して設けられてもよい。制御部5の少なくとも一部の機能は、例えば、クラウド(クラウドコンピューティング)によって実現されてもよい。
また、表示システム10は、車両と車両との間(車車間)、又は車両と信号機及び道路標識等のインフラ(infrastructure)との間(路車間)で、直接的に通信する、いわゆるV2X(Vehicle to Everything)の通信技術を利用してもよい。V2Xの通信技術によれば、例えば、移動体情報を、自動車100が、周辺の車両又はインフラから取得することが可能になる。また、インフラにて対象空間400に投影する虚像300の内容を決定してもよく、この場合、自動車100には、制御部5の少なくとも一部が搭載されなくてもよい。
また、表示システム10は、移動体(自動車100)の進行方向の前方に設定された対象空間400に虚像300を投影する構成に限らず、例えば、移動体の進行方向の側方、後方、又は上方等に虚像300を投影してもよい。
また、表示システム10は、自動車100に用いられるヘッドアップディスプレイに限らず、例えば、二輪車、電車、航空機、建設機械、及び船舶等、自動車100以外の移動体にも適用可能である。さらに、表示システム10は、移動体に限らず、例えば、アミューズメント施設で用いられてもよいし、ヘッドマウントディスプレイ(HMD:Head Mounted Display)等のウェアラブル端末、医療設備、又は据置型の装置として用いられてもよい。
また、表示システム10は、レーザ光を用いて虚像300を投影する構成に限らない。例えば、表示システム10は、拡散透過型のスクリーン1に対し、スクリーン1の背後からプロジェクタで画像(虚像300)を投影する構成であってもよい。または、表示システム10は、液晶ディスプレイで表示された画像に応じた虚像300を、投影部40を介して投影する構成であってもよい。
(まとめ)
以上述べたように、第1の態様に係る表示システム(10)は、投影部(40)と、制御部(5)と、を備える。投影部(40)は、対象空間(400)に虚像(300)を投影する。制御部(5)は、虚像(300)の表示を制御する。制御部(5)は、移動体(例えば、自動車(100))の進行方向に幅を持ち、少なくとも移動体が移動している路面(600)の属性情報を表す内容の虚像(300)を表示する。
以上述べたように、第1の態様に係る表示システム(10)は、投影部(40)と、制御部(5)と、を備える。投影部(40)は、対象空間(400)に虚像(300)を投影する。制御部(5)は、虚像(300)の表示を制御する。制御部(5)は、移動体(例えば、自動車(100))の進行方向に幅を持ち、少なくとも移動体が移動している路面(600)の属性情報を表す内容の虚像(300)を表示する。
この態様によれば、ユーザ(200)が対象空間(400)に表示される虚像(300)を見ることで、路面(600)の状況を把握し易い、という利点がある。また、この態様によれば、ナビゲーションシステムの使用の有無に依らず、路面(600)の属性情報を表す内容の虚像(300)が対象空間(400)に表示される。したがって、この態様によれば、ユーザ(200)が特に意識することなく路面(600)の状況を把握し易い、という利点がある。
更に、この態様によれば、虚像(300)が移動体の進行方向に幅を持って対象空間(400)に表示されるので、ユーザ(200)が直感的に路面(600)の状況を把握し易い、という利点がある。すなわち、虚像(300)が移動体の進行方向に幅を持たない形で対象空間(400)に表示された場合、この虚像(300)は平面形状の物体としてユーザ(200)に知覚される。つまり、この虚像(300)は、立体形状の物体の集合である実空間とは異なる形態としてユーザ(200)に知覚されるため、ユーザ(200)が違和感を覚える可能性がある。そして、ユーザ(200)がこのような虚像(300)を見た場合、虚像(300)を実空間上の物体として知覚する処理をユーザ(200)の脳で実行するため、ユーザ(200)が虚像(300)を直感的に把握し難い。
一方、この態様によれば、虚像(300)が移動体の進行方向に幅を持っているので、虚像(300)が実空間と同じ形態である立体形状の物体としてユーザ(200)に知覚され易い。このため、この態様によれば、ユーザ(200)が虚像(300)を見た場合に、ユーザ(200)の脳での上記の処理負荷が軽減されるので、ユーザ(200)が虚像(300)を直感的に把握し易い、という利点がある。
ここで、ユーザ(200)の運転を支援するという観点からすれば、ユーザ(200)が目的地への経路情報を把握することと比較して、ユーザ(200)が路面(600)の状況を把握することの方が即時性を要求されがちである。この態様によれば、ユーザ(200)が虚像(300)を直感的に把握し易いので、上記の即時性の要求を満たし易く、結果としてユーザ(200)の運転を支援する機能を向上することができる、という利点がある。
第2の態様に係る表示システム(10)では、第1の態様において、属性情報は、移動体の位置に関する情報、移動体の周辺の物体に関する情報、及び移動体の状態に関する情報のうち1以上の情報に基づく情報である。
この態様によれば、種々の路面(600)の状況をユーザ(200)に提示し易い、という利点がある。
第3の態様に係る表示システム(10)では、第1又は第2の態様において、属性情報は、予測される移動体の進行方向にある特定領域(A1)に移動体が進入可能か否かを表す情報である。
この態様によれば、移動体の進行方向を変更する必要があるか否かをユーザ(200)が判断し易い、という利点がある。
第4の態様に係る表示システム(10)では、第3の態様において、制御部(5)は、特定領域(A1)に移動体が進入不可能である場合に、移動体が特定領域(A1)を回避可能な経路を表す内容の虚像(300)を表示するように制御する。
この態様によれば、進入不可能な特定領域(A1)を回避するという選択をユーザ(200)が採り易い、という利点がある。
第5の態様に係る表示システム(10)では、第3の態様において、特定領域(A1)は、移動体が移動している車線(601)とは異なる他の車線(602)にある。
この態様によれば、ユーザ(200)が車線変更をするか否かを判断し易い、という利点がある。
第6の態様に係る表示システム(10)では、第1~第5のいずれかの態様において、属性情報は、移動体が移動している路面(600)の勾配を表す情報である。
この態様によれば、ユーザ(200)は、路面(600)の勾配に応じた運転を行い易い、という利点がある。
第7の態様に係る表示システム(10)では、第1~第6のいずれかの態様において、属性情報は、移動体が移動している路面(600)を含む道路の名称、又は方面を表す情報である。
この態様によれば、ユーザ(200)は、自身がどこに向かっているかを把握しながら運転し易い、という利点がある。
第8の態様に係る表示システム(10)では、第1~第7のいずれかの態様において、虚像(300)は、動画像である。
この態様によれば、虚像(300)が静止画像である場合と比較して、虚像(300)が表す路面(600)の状況にユーザ(200)が注視し易い、という利点がある。
第9の態様に係る表示システム(10)では、第1~第8のいずれかの態様において、属性情報は、移動体が移動している路面(600)と繋がっている他の路面(604)のうち移動体が進入可能な他の路面(604)を表す情報である。
この態様によれば、ユーザ(200)が移動体の現在の経路とは異なる他の経路を考慮しながら運転し易い、という利点がある。
第10の態様に係る情報提示システム(1000)は、第1~第9のいずれかの態様の表示システム(10)と、検知システム(7)と、を備える。検知システム(7)は、移動体の周辺の物体を検知する。
この態様によれば、ユーザ(200)が対象空間(400)に表示される虚像(300)を見ることで、路面(600)の状況を把握し易い、という利点がある。
第11の態様に係る表示システム(10)の制御方法は、投影部(40)と、制御部(5)と、を備える表示システム(10)の制御方法である。投影部(40)は、対象空間(400)に虚像(300)を投影する。制御部(5)は、虚像(300)の表示を制御する。表示システム(10)の制御方法は、移動体の進行方向に幅を持ち、少なくとも移動体が移動している路面(600)の属性情報を表す内容の虚像(300)を表示する。
この態様によれば、ユーザ(200)が対象空間(400)に表示される虚像(300)を見ることで、路面(600)の状況を把握し易い、という利点がある。
第12の態様に係るプログラムは、コンピュータシステムに、第11の態様の表示システム(10)の制御方法を実行させるためのプログラムである。
この態様によれば、ユーザ(200)が対象空間(400)に表示される虚像(300)を見ることで、路面(600)の状況を把握し易い、という利点がある。
第13の態様に係る移動体は、第1~第9のいずれかの態様の表示システム(10)と、反射部材(例えば、ウインドシールド(101))と、を備える。
この態様によれば、ユーザ(200)が対象空間(400)に表示される虚像(300)を見ることで、路面(600)の状況を把握し易い、という利点がある。
上記態様に限らず、実施形態に係る表示システム(10)の種々の構成(変形例を含む)は、表示システム(10)の制御方法、及び(コンピュータ)プログラムで具現化可能である。
第2~第9の態様に係る構成については、表示システム(10)に必須の構成ではなく、適宜省略可能である。
1 スクリーン
1a 可動スクリーン
1b 固定スクリーン
2 駆動部
3 照射部
4 投影光学系
6 取得部
10 表示システム
31 光源
32 走査部
40 投影部
41 拡大レンズ
42,43 ミラー
51 駆動制御部
52 表示制御部
71 撮像装置
72 レーザーレーダ
5 制御部
7 検知システム
100,110 自動車(移動体)
101 ウインドシールド(反射部材)
102 ダッシュボード
200 ユーザ
300 虚像
301 第1虚像
302 第2虚像
303 第3虚像
400 対象空間
600 路面
601 第1車線(車線)
602 第2車線(他の車線)
604 他の路面
603 カーブ
610,611 勾配
1000 情報提示システム
1a 可動スクリーン
1b 固定スクリーン
2 駆動部
3 照射部
4 投影光学系
6 取得部
10 表示システム
31 光源
32 走査部
40 投影部
41 拡大レンズ
42,43 ミラー
51 駆動制御部
52 表示制御部
71 撮像装置
72 レーザーレーダ
5 制御部
7 検知システム
100,110 自動車(移動体)
101 ウインドシールド(反射部材)
102 ダッシュボード
200 ユーザ
300 虚像
301 第1虚像
302 第2虚像
303 第3虚像
400 対象空間
600 路面
601 第1車線(車線)
602 第2車線(他の車線)
604 他の路面
603 カーブ
610,611 勾配
1000 情報提示システム
Claims (13)
- 画像を投影することにより、対象者が移動体の前方の対象空間に虚像が投影されているように視認する表示システムであって、
前記画像を投影する投影部と、
前記画像の表示を制御する制御部と、を備え、
前記制御部は、前記画像の表示を、前記移動体の進行方向の奥行きに幅を持ち、少なくとも前記移動体が移動している路面の属性情報を表す内容の画像を表示するように制御する
表示システム。 - 前記属性情報は、前記移動体の位置に関する情報、前記移動体の周辺の物体に関する情報、及び前記移動体の状態に関する情報のうち1以上の情報に基づく情報である
請求項1記載の表示システム。 - 前記属性情報は、予測される前記移動体の進行方向にある特定領域に前記移動体が進入可能か否かを表す情報である
請求項1又は2に記載の表示システム。 - 前記制御部は、前記特定領域に前記移動体が進入不可能である場合、前記画像の表示を、前記移動体が前記特定領域を回避可能な経路を表す内容の画像を表示するように制御する
請求項3に記載の表示システム。 - 前記特定領域は、前記移動体が移動している車線とは異なる他の車線にある
請求項3に記載の表示システム。 - 前記属性情報は、前記移動体が移動している前記路面の勾配を表す情報である
請求項1~5のいずれか1項に記載の表示システム。 - 前記属性情報は、前記移動体が移動している前記路面を含む道路の名称、又は方面を表す情報である
請求項1~6のいずれか1項に記載の表示システム。 - 前記虚像は、動画像である
請求項1~7のいずれか1項に記載の表示システム。 - 前記属性情報は、前記移動体が移動している前記路面と繋がっている他の路面のうち前記移動体が進入可能な他の路面を表す情報である
請求項1~8のいずれか1項に記載の表示システム。 - 請求項1~9のいずれか1項に記載の表示システムと、
前記移動体の周辺の物体を検知する検知システムと、を備える
情報提示システム。 - 画像を投影することにより、対象者が対象空間に虚像が投影されているように視認する表示システムであって、前記画像を投影する投影部と、前記画像の表示を制御する制御部と、を備える表示システムの制御方法であって、
前記画像の表示を、移動体の進行方向に幅を持ち、少なくとも前記移動体が移動している路面の属性情報を表す内容の画像を表示するように制御する
表示システムの制御方法。 - コンピュータシステムに、請求項11記載の表示システムの制御方法を実行させるための
プログラム。 - 請求項1~9のいずれか1項に記載の表示システムと、
光透過性を有し、前記投影部から出射された光を反射する反射部材と、を備える
移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112018003345.7T DE112018003345T5 (de) | 2017-06-30 | 2018-06-27 | Anzeigesystem, Informationspräsentationssystem mit einem Anzeigesystem, Verfahren zur Steuerung eines Anzeigesystems, Programm und mobiler Körper mit einem Anzeigesystem |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017129899A JP7113259B2 (ja) | 2017-06-30 | 2017-06-30 | 表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 |
| JP2017-129899 | 2017-06-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019004245A1 true WO2019004245A1 (ja) | 2019-01-03 |
Family
ID=64742287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/024286 WO2019004245A1 (ja) | 2017-06-30 | 2018-06-27 | 表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7113259B2 (ja) |
| DE (1) | DE112018003345T5 (ja) |
| WO (1) | WO2019004245A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020225989A1 (ja) * | 2019-05-08 | 2020-11-12 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP2020185982A (ja) * | 2019-05-08 | 2020-11-19 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| EP3742218A1 (en) * | 2019-05-21 | 2020-11-25 | Yazaki Corporation | Display unit |
| WO2021156678A1 (en) * | 2020-02-05 | 2021-08-12 | Unity Technologies ApS | Industrial head up display |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7234650B2 (ja) * | 2019-01-23 | 2023-03-08 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7243660B2 (ja) * | 2019-05-08 | 2023-03-22 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| WO2020225990A1 (ja) * | 2019-05-08 | 2020-11-12 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7014205B2 (ja) | 2019-06-05 | 2022-02-01 | 株式会社デンソー | 表示制御装置および表示制御プログラム |
| JP7206010B2 (ja) | 2019-09-19 | 2023-01-17 | 株式会社 ミックウェア | 制御装置 |
| KR20220022340A (ko) * | 2020-08-18 | 2022-02-25 | 삼성전자주식회사 | 컨텐츠를 시각화하는 장치 및 방법 |
| JP7444119B2 (ja) | 2021-03-25 | 2024-03-06 | トヨタ自動車株式会社 | 車線情報表示装置、車線情報表示方法、および車線情報表示用コンピュータプログラム |
| US20240075867A1 (en) * | 2021-04-13 | 2024-03-07 | Mitsubishi Electric Corporation | Drive assist apparatus and drive assist method |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006162442A (ja) * | 2004-12-07 | 2006-06-22 | Matsushita Electric Ind Co Ltd | ナビゲーション装置及びナビゲーション方法 |
| JP2006243888A (ja) * | 2005-03-01 | 2006-09-14 | Nippon Seiki Co Ltd | 車両用表示装置 |
| WO2008152784A1 (ja) * | 2007-06-12 | 2008-12-18 | Panasonic Corporation | ナビゲーション装置、ナビゲーション方法、及びナビゲーション用プログラム |
| JP2010236915A (ja) * | 2009-03-30 | 2010-10-21 | Equos Research Co Ltd | 情報表示装置 |
| JP2010257253A (ja) * | 2009-04-24 | 2010-11-11 | Denso Corp | 車両用表示装置 |
| JP2015068831A (ja) * | 2013-09-30 | 2015-04-13 | 本田技研工業株式会社 | 機能拡張された3次元(3−d)ナビゲーション |
| JP2015210644A (ja) * | 2014-04-25 | 2015-11-24 | 日本精機株式会社 | 車両用表示システム |
| JP2016064760A (ja) * | 2014-09-25 | 2016-04-28 | アイシン・エィ・ダブリュ株式会社 | 虚像表示装置 |
| JP2016182845A (ja) * | 2015-03-25 | 2016-10-20 | マツダ株式会社 | ヘッドアップディスプレイ装置 |
| JP2017026417A (ja) * | 2015-07-21 | 2017-02-02 | トヨタ自動車株式会社 | 情報提示システム |
| JP2017091170A (ja) * | 2015-11-09 | 2017-05-25 | 株式会社デンソー | 提示制御装置及び提示制御方法 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000214766A (ja) * | 1999-01-22 | 2000-08-04 | Fujitsu Ten Ltd | ナビゲ―ション装置 |
| JP2009250827A (ja) * | 2008-04-08 | 2009-10-29 | Panasonic Corp | ナビゲーション装置、方法及びプログラム |
| JP5161760B2 (ja) * | 2008-12-26 | 2013-03-13 | 株式会社東芝 | 車載用表示システム及び表示方法 |
| JP6058907B2 (ja) * | 2012-03-29 | 2017-01-11 | 矢崎エナジーシステム株式会社 | 車載記録装置 |
| JP6273976B2 (ja) * | 2014-03-31 | 2018-02-07 | 株式会社デンソー | 車両用表示制御装置 |
| JP6160566B2 (ja) * | 2014-06-11 | 2017-07-12 | マツダ株式会社 | 車両制御装置 |
| JP6262111B2 (ja) * | 2014-09-29 | 2018-01-17 | 矢崎総業株式会社 | 車両用表示装置 |
| JP2017094882A (ja) * | 2015-11-23 | 2017-06-01 | アイシン・エィ・ダブリュ株式会社 | 虚像生成システム、虚像生成方法及びコンピュータプログラム |
-
2017
- 2017-06-30 JP JP2017129899A patent/JP7113259B2/ja active Active
-
2018
- 2018-06-27 DE DE112018003345.7T patent/DE112018003345T5/de active Pending
- 2018-06-27 WO PCT/JP2018/024286 patent/WO2019004245A1/ja active Application Filing
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006162442A (ja) * | 2004-12-07 | 2006-06-22 | Matsushita Electric Ind Co Ltd | ナビゲーション装置及びナビゲーション方法 |
| JP2006243888A (ja) * | 2005-03-01 | 2006-09-14 | Nippon Seiki Co Ltd | 車両用表示装置 |
| WO2008152784A1 (ja) * | 2007-06-12 | 2008-12-18 | Panasonic Corporation | ナビゲーション装置、ナビゲーション方法、及びナビゲーション用プログラム |
| JP2010236915A (ja) * | 2009-03-30 | 2010-10-21 | Equos Research Co Ltd | 情報表示装置 |
| JP2010257253A (ja) * | 2009-04-24 | 2010-11-11 | Denso Corp | 車両用表示装置 |
| JP2015068831A (ja) * | 2013-09-30 | 2015-04-13 | 本田技研工業株式会社 | 機能拡張された3次元(3−d)ナビゲーション |
| JP2015210644A (ja) * | 2014-04-25 | 2015-11-24 | 日本精機株式会社 | 車両用表示システム |
| JP2016064760A (ja) * | 2014-09-25 | 2016-04-28 | アイシン・エィ・ダブリュ株式会社 | 虚像表示装置 |
| JP2016182845A (ja) * | 2015-03-25 | 2016-10-20 | マツダ株式会社 | ヘッドアップディスプレイ装置 |
| JP2017026417A (ja) * | 2015-07-21 | 2017-02-02 | トヨタ自動車株式会社 | 情報提示システム |
| JP2017091170A (ja) * | 2015-11-09 | 2017-05-25 | 株式会社デンソー | 提示制御装置及び提示制御方法 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020225989A1 (ja) * | 2019-05-08 | 2020-11-12 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP2020185982A (ja) * | 2019-05-08 | 2020-11-19 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7092158B2 (ja) | 2019-05-08 | 2022-06-28 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP2022118036A (ja) * | 2019-05-08 | 2022-08-12 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| US11850940B2 (en) | 2019-05-08 | 2023-12-26 | Denso Corporation | Display control device and non-transitory computer-readable storage medium for display control on head-up display |
| EP3742218A1 (en) * | 2019-05-21 | 2020-11-25 | Yazaki Corporation | Display unit |
| WO2021156678A1 (en) * | 2020-02-05 | 2021-08-12 | Unity Technologies ApS | Industrial head up display |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112018003345T5 (de) | 2020-03-05 |
| JP7113259B2 (ja) | 2022-08-05 |
| JP2019012483A (ja) | 2019-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7113259B2 (ja) | 表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 | |
| US10600250B2 (en) | Display system, information presentation system, method for controlling display system, computer-readable recording medium, and mobile body | |
| US12025461B2 (en) | Display control device, display control method, and non-transitory tangible computer-readable medium therefor | |
| US20140362195A1 (en) | Enhanced 3-dimensional (3-d) navigation | |
| WO2021006060A1 (ja) | 表示制御装置および表示制御プログラム | |
| US20160003636A1 (en) | Multi-level navigation monitoring and control | |
| US20190005727A1 (en) | Display system, information presentation system, control method of display system, storage medium, and mobile body | |
| JP7218822B2 (ja) | 表示制御装置 | |
| US20210016793A1 (en) | Control apparatus, display apparatus, movable body, and image display method | |
| JP2010143520A (ja) | 車載用表示システム及び表示方法 | |
| JP2015068831A (ja) | 機能拡張された3次元(3−d)ナビゲーション | |
| JP7028228B2 (ja) | 表示システム、表示制御装置及び表示制御プログラム | |
| JP6883759B2 (ja) | 表示システム、表示システムの制御方法、プログラム、及び移動体 | |
| US10649207B1 (en) | Display system, information presentation system, method for controlling display system, recording medium, and mobile body | |
| JP2015069656A (ja) | 3次元(3−d)ナビゲーション | |
| US11493357B2 (en) | Superimposed image display device, superimposed image drawing method, and computer program | |
| WO2019189515A1 (en) | Control apparatus, display apparatus, movable body, and image display method | |
| JP7234650B2 (ja) | 表示制御装置及び表示制御プログラム | |
| JP2022043996A (ja) | 表示制御装置及び表示制御プログラム | |
| WO2020149109A1 (ja) | 表示システム、表示制御装置及び表示制御プログラム | |
| JP2021117089A (ja) | 表示装置、及び表示方法 | |
| JP2020073365A (ja) | 情報提供装置、情報提供方法及び情報提供用制御プログラム | |
| JP7338632B2 (ja) | 表示装置 | |
| JP7266257B2 (ja) | 表示システム、及び表示システムの制御方法 | |
| WO2021139792A1 (zh) | 平视显示系统及其控制方法、交通工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18824437 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18824437 Country of ref document: EP Kind code of ref document: A1 |