WO2018128165A1 - ロータおよび電動モータ - Google Patents
ロータおよび電動モータ Download PDFInfo
- Publication number
- WO2018128165A1 WO2018128165A1 PCT/JP2017/047240 JP2017047240W WO2018128165A1 WO 2018128165 A1 WO2018128165 A1 WO 2018128165A1 JP 2017047240 W JP2017047240 W JP 2017047240W WO 2018128165 A1 WO2018128165 A1 WO 2018128165A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- core
- rotor
- circumferential direction
- magnetic pole
- inner peripheral
- Prior art date
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
Definitions
- the present invention relates to a rotor and an electric motor.
- a brushless motor including a stator having teeth around which a coil is wound and a rotor that is rotatably provided in the radial direction of the stator is known as an electric motor.
- This brushless motor rotationally drives the rotor by performing energization control on the coil.
- a rotor of this type of brushless motor has a rotating shaft, a substantially cylindrical rotor core that is externally fixed to the rotating shaft, and a magnet provided on the rotor core.
- a permanent magnet embedded system IPM: Interior Permanent Magnet
- IPM Interior Permanent Magnet
- the magnetic circuit of the rotor core concentrates the magnetic flux.
- the thickness of the rotor core at this location becomes thin and magnetic saturation occurs.
- the rigidity of the thin portion is lowered. For this reason, the rotor core may be deformed by centrifugal force when the rotor rotates.
- the present invention provides a rotor and an electric motor that can ensure rigidity while suppressing a decrease in magnetic characteristics due to leakage magnetic flux.
- the rotor according to the present invention includes a cylindrical inner core that is fitted and fixed to a rotary shaft, and a predetermined interval in the circumferential direction so that one end in the radial direction contacts the outer peripheral surface of the inner peripheral core.
- a plurality of permanent magnets arranged in an open manner, and a plurality of magnetic pole part cores that are provided so as to fill a space between the permanent magnets adjacent in the circumferential direction, and that form a magnetic path.
- the inner connecting part and the outer peripheral connecting part that cause leakage magnetic flux are not formed over the entire axial direction, but are formed in part.
- the magnetic path as an inner connection part and the outer periphery connection part whole can be decreased. For this reason, it is possible to suppress a decrease in the magnetic characteristics of the rotor due to the leakage magnetic flux while securing a necessary thickness as the thickness in the circumferential direction of the inner coupling portion and the outer circumferential coupling portion.
- the rotor according to the present invention includes an intermediate core formed by laminating a plurality of electromagnetic steel sheets, and end cores disposed on both sides in the axial direction of the intermediate core, and the intermediate core includes the inner peripheral core and the magnetic pole portion.
- the end core includes the inner peripheral core, the magnetic pole part core, the inner connecting portion, and the outer peripheral connecting portion.
- the ratio between the intermediate core and the end core is set to 8: 2.
- This configuration makes it possible to reliably improve the magnetic characteristics of the rotor while ensuring the rigidity of the rotor.
- a plurality of concave portions are formed in the inner peripheral core so that a plurality of hollow portions are formed between the inner peripheral core and the permanent magnet.
- This configuration can reduce magnetic flux leakage to the inner peripheral core.
- the recesses are respectively formed on both sides in the circumferential direction at the radially inner end of each permanent magnet, and the inner coupling portion is between the permanent magnets adjacent in the circumferential direction, and It arrange
- the number of locations where the inner connecting portion is formed can be reduced as much as possible, and magnetic flux leakage to the inner peripheral core can be reliably reduced.
- each of the inner connecting portions is formed in a quarter region with respect to the entire axial direction.
- This configuration makes it possible to minimize magnetic flux leakage due to the inner connecting portion while ensuring the rigidity of the rotor.
- At least one of the circumferential width of the inner coupling portion and the radial width of the outer circumferential coupling portion is set to a width capable of magnetic saturation.
- the electric motor according to the present invention includes the rotor described above, an annular stator core formed so as to surround the rotor, and an inner circumferential surface of the stator core that protrudes inward in the radial direction. And a stator having a plurality of teeth.
- the inner connection part and the outer periphery connection part that cause leakage magnetic flux are not formed over the entire axial direction, but are formed as a part of the inner connection part and the outer periphery connection part as a whole.
- the magnetic path can be reduced. For this reason, it is possible to suppress a decrease in the magnetic characteristics of the rotor due to the leakage magnetic flux while securing a necessary thickness as the thickness in the circumferential direction of the inner coupling portion and the outer circumferential coupling portion.
- FIG. 2 is a cross-sectional view taken along line AA in FIG. It is sectional drawing orthogonal to the axial direction of the stator and rotor in 1st Embodiment of this invention. It is a perspective view of the rotor in 1st Embodiment of this invention. It is a perspective view of the rotor core in 1st Embodiment of this invention. It is a perspective view of the end electromagnetic steel plate in a 1st embodiment of the present invention. 1 is a perspective view of an intermediate electromagnetic steel sheet according to a first embodiment of the present invention.
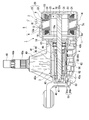
- FIG. 1 is a perspective view of a motor 1 with a speed reducer.
- FIG. 2 is a cross-sectional view taken along line AA in FIG.
- the motor 1 with a reduction gear serves as a drive source for electrical components (for example, a wiper, a power window, a sunroof, an electric seat, etc.) mounted on a vehicle, for example.
- the motor 1 with a speed reducer includes a motor unit 2, a speed reduction unit 3 that decelerates and outputs the rotation of the motor unit 2, and a controller unit 4 that performs drive control of the motor unit 2.
- the simple axial direction refers to the axial direction of the rotating shaft 31 of the motor unit 2
- the simple circumferential direction refers to the circumferential direction of the rotating shaft 31, and simply refers to the radial direction.
- the radial direction of the rotating shaft 31 shall be said.
- the motor unit 2 includes a motor case 5, a substantially cylindrical stator 8 housed in the motor case 5, and a rotor 9 provided on the radially inner side of the stator 8 and rotatable with respect to the stator 8. And.
- the motor case 5 is formed of a material with excellent heat dissipation, such as aluminum die cast or an iron plate.
- the motor case 5 includes a first motor case 6 and a second motor case 7 that are configured to be separable in the axial direction.
- the first motor case 6 and the second motor case 7 are each formed in a bottomed cylindrical shape.
- the first motor case 6 and the second motor case 7 form a motor case 5 having an internal space by fitting the respective openings 6a and 7a.
- the first motor case 6 is integrally formed with the gear case 40 so that the bottom portion 10 is joined to the gear case 40 of the speed reduction portion 3.
- a through-hole 10 a through which the rotation shaft 31 of the rotor 9 can be inserted is formed at a substantially central portion of the bottom portion 10 in the radial direction.
- the peripheral wall portion 11 of the first motor case 6 is formed to be a substantially regular hexagon when viewed from the axial direction.
- a stator internal fitting portion 18 is formed which has a diameter increased by a step on the opening 6 a side.
- the outer peripheral surface of the stator 8 is fitted to the stator inner fitting portion 18.
- On the outer peripheral surface of the peripheral wall portion 11 of the first motor case 6, a fitting portion 12 having a reduced diameter is formed on the opening 6a side through a step portion 12a.
- the fitting portion 12 is for fitting the opening 7 a of the second motor case 7.
- the peripheral wall portion 14 of the second motor case 7 is also formed to be a substantially regular hexagon when viewed from the axial direction so as to correspond to the shape of the peripheral wall portion 11 of the first motor case 6.
- a ridge portion 16 is formed over the entire periphery on the opening 7a side.
- the opening portion 7a of the second motor case 7 is formed with a fitting portion 17 whose diameter is increased by a step.
- the fitting portion 17 and the fitting portion 12 of the first motor case 6 are fitted.
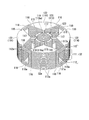
- FIG. 3 is a cross-sectional view orthogonal to the axial direction of the stator 8 and the rotor 9.
- the stator 8 includes a cylindrical core portion 21, and a plurality of (for example, six in the present embodiment) teeth 22 projecting radially inward from the core portion 21, Has a stator core 20 integrally formed.
- the stator core 20 is formed by laminating a plurality of metal plates in the axial direction.
- the stator core 20 is not limited to the case where a plurality of metal plates are laminated in the axial direction, and may be formed, for example, by press-molding soft magnetic powder.
- the core portion 21 forms a magnetic path and constitutes the outer shell of the stator 8.
- the core portion 21 has a substantially regular hexagonal cross-sectional shape orthogonal to the axial direction so as to correspond to the shapes of the peripheral wall portions 11 and 14 of the two motor cases 6 and 7.
- the outer peripheral surface of the core portion 21 is fitted into the stator inner fitting portion 18 of the first motor case 6.
- the teeth 22 are formed by integrally forming a teeth main body 101 projecting along the radial direction from the inner peripheral surface of the core portion 21 and a flange 102 extending along the circumferential direction from the radial inner end of the teeth main body 101. It is.
- the flange portion 102 is formed so as to extend from the teeth body 101 to both sides in the circumferential direction.
- the inner peripheral surface 102a of the collar portion 102 is formed in an arc shape centered on the rotation axis center C1.
- the slot 19 is formed between the collar parts 102 adjacent in the circumferential direction.
- each of the teeth 22 is covered with a resin insulator 23.
- a coil 24 is wound around each of the teeth 22 from above the insulator 23.
- Each coil 24 generates a magnetic field for rotating the rotor 9 by power feeding from the controller unit 4.
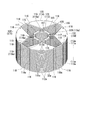
- FIG. 4 is a perspective view of the rotor 9.
- the rotor 9 includes a rotating shaft 31, a columnar rotor core 32 that is externally fixed to the rotating shaft 31, and a plurality of rotors 9 embedded in the rotor core 32 at equal intervals in the circumferential direction.
- four permanent magnets 33 are provided.
- the rotating shaft 31 is integrally formed with the worm shaft 44 that constitutes the speed reducing portion 3.
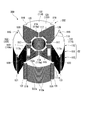
- FIG. 5 is a perspective view of the rotor core 32.
- the rotor core 32 includes an intermediate core 111 formed by stacking a plurality of intermediate electromagnetic steel plates 111a, and an end core 112 formed by stacking a plurality of end electromagnetic steel plates 112a arranged on both sides in the axial direction of the intermediate core 111. And is constituted by.
- FIG. 6 is a perspective view of the end electromagnetic steel sheet 112a.
- the end electromagnetic steel plates 112 a are arranged at equal intervals in the circumferential direction so as to surround the periphery of the inner peripheral portion 113 and the substantially annular inner peripheral portion 113 that is fitted and fixed to the rotary shaft 31.
- the part 118 is integrated.
- the inner diameter of the inner peripheral portion 113 is set so that the rotary shaft 31 can be press-fitted or inserted.
- four protruding strip portions 115 are arranged at equal intervals in the circumferential direction.
- the ridge 115 is formed in a substantially rectangular shape that is long in the circumferential direction, and a lower bottom 33a of the permanent magnet 33, which will be described later, is in contact with the radially outer end 115a.
- the magnetic pole portion 114 is formed to have a substantially fan shape in an axial plan view so as to fill between the permanent magnets 33 adjacent in the circumferential direction.
- the magnetic pole portion 114 is disposed such that the arc surface 114a faces the radially outer side.
- the magnetic pole portion 114 is disposed such that the tip end portion 114b opposite to the arcuate surface 114a is opposed to the position in the center in the circumferential direction of the concave portion 119 formed in the inner peripheral portion 113 in the radial direction.
- the circular arc surface 114a of the magnetic pole part 114 constitutes the outer peripheral surface of the intermediate electromagnetic steel plate 111a (rotor core 32).
- Groove portions 116 are formed slightly before the both ends in the circumferential direction of the arc surface 114a.
- the groove 116 is formed in a substantially triangular shape so as to taper toward the inside in the radial direction.
- An outer peripheral connecting portion 118 is formed closer to the end in the circumferential direction than the groove 116 of the circular arc surface 114a formed in this way.
- Inner connecting portions 117 are integrally formed in the center between the protruding ridge portions 115 adjacent to each other in the circumferential direction of the inner peripheral portion 113.
- the inner connecting portion 117 extends along the radial direction, and connects the inner peripheral portion 113 and the tip end portion 114b of each magnetic pole portion 114. Thereby, the inner peripheral part 113 and the four magnetic pole parts 114 are integrated through the inner connecting part 117.
- the inner connecting portion 117 has a rod shape extending along the radial direction.
- the cross-sectional shape along the axial direction of the inner connecting portion 117 is a substantially square shape.
- the end electromagnetic steel plates 112a As described above, a plurality (for example, the first embodiment) of the end electromagnetic steel plates 112a in which the inner peripheral portion 113, the four magnetic pole portions 114, the four inner connecting portions 117, and the four outer peripheral connecting portions 118 are integrated. Then, 4 sheets) are stacked. Furthermore, the end core 112 is formed by integrating the end electromagnetic steel plates 112a by caulking or the like, for example.
- FIG. 7 is a perspective view of the intermediate electromagnetic steel plate 111a.
- the intermediate electromagnetic steel plates 111 a are arranged at regular intervals in the circumferential direction so as to surround the periphery of the inner peripheral portion 113 and the substantially annular inner peripheral portion 113 that are fitted and fixed to the rotary shaft 31.
- the substantially fan-shaped four magnetic pole portions 114 are divided. That is, the intermediate electromagnetic steel plate 111a is obtained by removing the inner connecting portion 117 and the outer peripheral connecting portion 118 from the end electromagnetic steel plate 112a.
- the inner peripheral part 113 and the magnetic pole part 114 of the intermediate electromagnetic steel plate 111a are the same structures as the inner peripheral part 113 and the magnetic pole part 114 of the end electromagnetic steel plate 112a, the same code
- the intermediate core 111 is formed by laminating a plurality of (for example, 32 in the present embodiment) intermediate electromagnetic steel plates 111a in which the inner peripheral portion 113 and the four magnetic pole portions 114 are respectively divided and fixed by caulking. Is formed.
- the intermediate core 111 the inner peripheral part 113 and each magnetic pole part 114 which were laminated
- the end cores 112 are disposed at both axial ends of the intermediate core 111, and the intermediate core 111 and the end core 112 are integrated by, for example, caulking. Therefore, as shown in FIG. 5, the inner peripheral portion 113 and each magnetic pole portion 114 of the intermediate core 111 are integrated via the end core 112, and the rotor core 32 is further configured.
- the rotor core 32 includes a substantially cylindrical inner peripheral core 121 formed by stacking inner peripheral portions 113 and four magnetic pole portion cores 122 extending in the axial direction formed by stacking magnetic pole portions 114. And an inner connecting portion 117 that connects the inner peripheral core 121 and the magnetic pole portion core 122 and an outer peripheral connecting portion 118 that connects the magnetic pole portion cores 122 adjacent in the circumferential direction.
- the magnetic pole core 122 serves as a path for the magnetic flux generated by the permanent magnet 33 and the magnetic flux formed by the stator 8.
- the inner connecting portion 117 and the outer peripheral connecting portion 118 of the rotor core 32 are formed with openings 117a and 118a at positions corresponding to the intermediate core 111, respectively.
- grooves 116 are formed on the outer peripheral surface 32a of the rotor core 32 so as to extend in the entire axial direction.
- the two groove portions 116 located on both sides in the circumferential direction across the magnet storage portion 120 have a circumferential length L ⁇ b> 1 between the circumferential centers in the flange portion 102 of the tooth 22. It is set longer than the circumferential length L2 of the inner peripheral surface.
- the permanent magnet 33 is fitted in the magnet housing part 120 of the rotor core 32 configured as described above.
- the permanent magnet 33 is formed to have an isosceles trapezoidal shape so that the cross-sectional shape orthogonal to the axial direction gradually increases in width toward the inner side in the radial direction so as to correspond to the shape of the magnet housing portion 120.
- the permanent magnet 33 is positioned between the lower base 33a positioned radially inside, the upper base 33b positioned radially outward, and the lower base 33a and upper base 33b in the cross-sectional shape orthogonal to the axial direction.
- a pair of legs 33c are examples of legs 33c.
- the permanent magnet 33 is magnetized in parallel orientation or polar anisotropic orientation, and is formed so as to have an isosceles trapezoidal shape. Therefore, the orientation of the orientation for converging the magnetic flux is the rotor core 32.
- the outer peripheral side (the teeth 22 side of the stator 8).
- the direction of the magnetic flux in the magnetic pole part core 122 can be easily converged to the teeth 22 side.
- the magnetic flux can be concentrated in the magnetic pole part core 122 without bringing the permanent magnets 33 adjacent in the circumferential direction close to each other.
- the q-axis magnetic path can be set large, and a high reluctance torque can be generated. Therefore, the effective magnetic flux of the rotor core 32 can be increased.
- the upper bottom 33 b is exposed to the outside in the radial direction through the opening 118 a of the outer peripheral surface 32 a of the rotor core 32.
- the lower bottom 33 a of the permanent magnet 33 is in contact with the radially outer end 115 a of the ridge 115 of the rotor core 32. Therefore, recesses 119 are interposed between the lower bottom 33a of the permanent magnet 33 and the inner peripheral core 121 of the rotor core 32 on both sides in the circumferential direction of the lower bottom 33a. That is, the concave portion 119 functions as a flux barrier (hollow portion) 119a that makes it difficult for magnetic flux to pass.
- the inner connecting portion 117 is disposed between the permanent magnets 33 adjacent in the circumferential direction and between the recesses 119 adjacent in the circumferential direction.
- the width H1 in the circumferential direction of the inner connecting portion 117 is as narrow as possible within a range in which the rigidity of the rotor core 32 can be ensured.
- the width H1 of the inner connecting portion 117 is set to a width at which the magnetic flux of the permanent magnet 33 can be saturated.
- the speed reduction unit 3 includes a gear case 40 to which the motor case 5 is attached, and a worm speed reduction mechanism 41 accommodated in the gear case 40.
- the gear case 40 is made of a material with excellent heat dissipation, such as aluminum die cast.
- the gear case 40 is formed in a box shape having an opening 40a on one surface, and has a gear housing portion 42 for housing the worm reduction mechanism 41 therein.
- An opening 43 that connects the through hole 10a of the first motor case 6 and the gear housing portion 42 is formed in the side wall 40b of the gear case 40 where the first motor case 6 is integrally formed.
- Three fixing brackets 54a, 54b, 54c are integrally formed on the side wall 40b of the gear case 40. These fixing brackets 54a, 54b, 54c fix the motor 1 with a speed reducer to a vehicle body (not shown) or the like.
- the three fixing brackets 54a, 54b, 54c are arranged at substantially equal intervals in the circumferential direction so as to avoid the motor unit 2.
- Anti-vibration rubber 55 is attached to each of the fixed brackets 54a, 54b, 54c. The anti-vibration rubber 55 prevents vibration when driving the motor 1 with a speed reducer from being transmitted to a vehicle body (not shown).
- a substantially cylindrical bearing boss 49 projects from the bottom wall 40c of the gear case 40.
- the bearing boss 49 is for rotatably supporting the output shaft 48 of the worm reduction mechanism 41, and a sliding bearing (not shown) is provided on the inner peripheral surface.
- An O ring (not shown) is mounted on the inner peripheral edge of the bearing boss 49. This prevents dust and water from entering from the outside to the inside via the bearing boss 49.
- a plurality of ribs 52 are provided on the outer peripheral surface of the bearing boss 49. Thereby, the rigidity of the bearing boss 49 is ensured.
- the worm speed reduction mechanism 41 accommodated in the gear accommodating portion 42 includes a worm shaft 44 and a worm wheel 45 engaged with the worm shaft 44.
- the worm shaft 44 is disposed coaxially with the rotation shaft 31 of the motor unit 2.
- the worm shaft 44 is rotatably supported by bearings 46 and 47 provided at both ends of the gear case 40.
- the end of the worm shaft 44 on the motor unit 2 side protrudes to the opening 43 of the gear case 40 through the bearing 46.
- the projecting end portion of the worm shaft 44 and the end portion of the rotating shaft 31 of the motor unit 2 are joined, and the worm shaft 44 and the rotating shaft 31 are integrated.
- the worm shaft 44 and the rotary shaft 31 may be integrally formed by molding a worm shaft portion and a rotary shaft portion from one base material.
- the worm wheel 45 meshed with the worm shaft 44 is provided with an output shaft 48 at the radial center of the worm wheel 45.
- the output shaft 48 is arranged coaxially with the rotation axis direction of the worm wheel 45.
- the output shaft 48 protrudes outside the gear case 40 via the bearing boss 49 of the gear case 40.
- a spline 48 a that can be connected to an electrical component (not shown) is formed at the protruding tip of the output shaft 48.
- a sensor magnet (not shown) is provided at the radial center of the worm wheel 45 on the side opposite to the side from which the output shaft 48 is projected.
- This sensor magnet constitutes one of the rotational position detector 60 that detects the rotational position of the worm wheel 45.
- the magnetic detection element 61 that constitutes the other of the rotational position detection unit 60 is provided in the controller unit 4 that is disposed facing the worm wheel 45 on the sensor magnet side of the worm wheel 45 (on the opening 40a side of the gear case 40). Yes.
- the controller unit 4 that controls the drive of the motor unit 2 includes a controller board 62 on which the magnetic detection element 61 is mounted, and a cover 63 provided so as to close the opening 40a of the gear case 40.
- the controller board 62 is disposed opposite to the sensor magnet side of the worm wheel 45 (opening 40a side of the gear case 40).
- the controller board 62 has a plurality of conductive patterns (not shown) formed on a so-called epoxy board.
- the controller board 62 is connected to a terminal portion of the coil 24 drawn from the stator core 20 of the motor unit 2 and is electrically connected to connector terminals (both not shown) provided on the cover 63. Yes.
- the controller board 62 has a voltage applied to the power module or the controller board including a switching element such as an FET (Field Effect Transistor) that controls the current supplied to the coil 24.
- a smoothing capacitor (both not shown) and the like are mounted.
- the cover 63 covering the controller board 62 configured in this way is made of resin.
- the cover 63 is formed so as to bulge slightly outward.
- the inner surface side of the cover 63 is a controller housing portion 56 that houses the controller board 62 and the like.
- a connector (not shown) is integrally formed on the outer periphery of the cover 63. This connector is formed so that it can be fitted with a connector extending from an external power source (not shown).
- the controller board 62 is electrically connected to the terminal of a connector (not shown). As a result, the power of the external power supply is supplied to the controller board 62.
- a fitting portion 81 that is fitted to the end portion of the side wall 40b of the gear case 40 is formed to project.
- the fitting portion 81 is configured by two walls 81 a and 81 b along the opening edge of the cover 63.
- the end of the side wall 40b of the gear case 40 is inserted (fitted) between the two walls 81a and 81b.
- a labyrinth portion 83 is formed between the gear case 40 and the cover 63.
- the labyrinth 83 prevents dust and water from entering between the gear case 40 and the cover 63.
- the gear case 40 and the cover 63 are fixed by fastening a bolt (not shown).
- the rotation position detection result of the worm wheel 45 detected by the magnetic detection element 61 mounted on the controller board 62 is output as a signal to an external device (not shown).
- the external device controls the switching timing of the switching elements and the like of the power module (not shown) based on the rotational position detection signal of the worm wheel 45, and the drive control of the motor unit 2 is performed.
- the output of the drive signal of the power module and the drive control of the motor unit 2 may be performed by the controller unit 4.
- the rotor core 32 of the rotor 9 includes an inner peripheral core 121 that is externally fitted and fixed to the rotary shaft 31, a magnetic pole part core 122 that constitutes a magnetic pole, and an inner connection part 117 that connects the inner peripheral core 121 and the magnetic pole part core 122. , And an outer peripheral connection part 118 that connects the magnetic pole part cores 122 adjacent to each other in the circumferential direction.
- openings 117 a and 118 a are formed in the inner connecting portion 117 and the outer peripheral connecting portion 118.
- the inner connecting portion 117 connects a part of the inner peripheral core 121 and the magnetic pole portion core 122.
- the outer periphery connection part 118 has connected some magnetic pole part cores 122 mutually.
- the inner connecting portion 117 and the outer peripheral connecting portion 118 that cause leakage magnetic flux in a part rather than the entire axial direction, the inner connecting portion 117 and the outer peripheral connecting portion 118 as a whole are formed.
- the magnetic path can be reduced. For this reason, as the thickness in the circumferential direction of the inner coupling portion 117 and the outer circumferential coupling portion 118, it is possible to suppress a decrease in the magnetic characteristics of the rotor 9 due to leakage magnetic flux while ensuring a necessary thickness.
- the rotor core 32 is divided into the intermediate core 111 in which the inner peripheral portion 113 and the magnetic pole portion 114 are divided, and the inner peripheral portion. 113 and an end core 112 having an inner connecting part 117 and an outer peripheral connecting part 118 for connecting the magnetic pole part 114.
- the rotor core 32 having the openings 117a and 118a can be formed only by laminating the intermediate core 111 and the end core 112. For this reason, the manufacturing cost of the rotor 9 can be reduced.
- the magnetic flux density at both ends in the axial direction is more likely to decrease than the magnetic flux density at the center in the axial direction.
- the magnetic flux leakage of the rotor core 32 is achieved by disposing the intermediate core 111 without the inner connecting portion 117 and the outer peripheral connecting portion 118 at a location corresponding to the most axial center of the permanent magnet 33 having a relatively high magnetic flux density. Can be effectively reduced. Further, the permanent magnet 33 can be effectively exposed on the outer peripheral surface 32 a of the rotor core 32. Therefore, it is possible to maximize the magnetic characteristics of the rotor 9 while ensuring the rigidity of the rotor 9.
- the intermediate core 111 is constituted by 32 intermediate electromagnetic steel plates 111a
- the end core 112 is constituted by four end electromagnetic steel plates 112a.
- the ratio between the intermediate core 111 and the end core 112 constituting the rotor core 32 is set to 8: 2.
- the inner connecting portion 117 is formed in a quarter region with respect to the entire axial direction where the inner connecting portion 117 is formed.
- the outer peripheral connection portion 118 is formed in a region that is 1 ⁇ 4 of the entire axial direction where the outer peripheral connection portion 118 is formed.
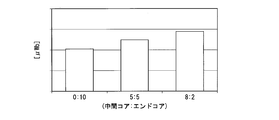
- FIG. 8 is a graph comparing the effective magnetic flux amount of the rotor core 32 according to the ratio between the intermediate core 111 and the end core 112 (0:10, 5: 5, 8: 2). As shown in FIG. 8, it can be confirmed that when the ratio between the intermediate core 111 and the end core 112 is 8: 2, an excellent effective magnetic flux amount can be obtained.
- FIG. 9 is a diagram illustrating an analysis result of stress applied when the rotor core 32 is rotated when the ratio between the intermediate core 111 and the end core 112 is 8: 2. As shown in FIG. 9, it can be confirmed that the rotor core 32 has sufficient strength without the magnetic pole portion core 122 and the permanent magnet 33 being scattered by the inner connecting portion 117 and the outer peripheral connecting portion 118 of the end core 112. .
- a flux barrier 119a is formed between the lower bottom 33a of the permanent magnet 33 and the inner peripheral core 121 of the rotor core 32. For this reason, the magnetic flux leakage to the inner peripheral core 121 side of the permanent magnet 33 can be reduced more reliably.
- the recesses 119 are formed on both sides in the circumferential direction of the lower bottom 33a of each permanent magnet 33, respectively.
- the inner connection part 117 is arrange
- the inner peripheral core 121 and the magnetic pole part core 122 can be integrated while minimizing the location where the inner connecting part 117 is disposed. Therefore, the magnetic flux leakage of the permanent magnet 33 can be reduced as much as possible while the rotor core 32 is integrated with sufficient strength.
- groove portions 116 are formed on both sides in the circumferential direction of each magnet storage portion 120 so as to extend in the entire axial direction.
- the circumferential length L1 between the circumferential centers of the two groove portions 116 located on both sides in the circumferential direction with the magnet storage portion 120 interposed therebetween is greater than the circumferential length L2 of the inner circumferential surface of the flange portion 102 of the tooth 22. Is also set longer. In the place where the groove part 116 is formed, the gap between the rotor core 32 and the teeth 22 of the stator 8 becomes large. For this reason, in the groove part 116, the influence on the teeth 22 by the magnetic flux of the rotor core 32 becomes small.
- FIG. 10 is a perspective view of the rotor 209 in the second embodiment.
- FIG. 10 corresponds to FIG. 4 described above.
- FIG. 11 is a perspective view of the rotor core 232 in the second embodiment.
- FIG. 11 corresponds to FIG. 5 described above.
- the difference between the first embodiment and the second embodiment is that the rotor core 32 of the first embodiment includes an intermediate core 111 and both axial sides of the intermediate core 111.
- the rotor core 232 of the second embodiment is configured such that the intermediate electromagnetic steel plate 111a constituting the intermediate core 111 and the end electromagnetic steel plate 112a constituting the end core 112 are alternately arranged. It is in the point where it is laminated. End electromagnetic steel sheets 112a are disposed at both ends of the rotor core 232 in the axial direction. Even in such a configuration, the volume of the inner coupling portion 117 and the outer circumferential coupling portion 118 that cause the magnetic flux leakage of the permanent magnet 33 can be reduced, and thus the same effects as those of the first embodiment described above. Play.
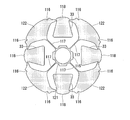
- FIG. 12 is a perspective view of the rotor core 332 in the third embodiment.
- FIG. 12 corresponds to FIG. 5 described above.
- the outer peripheral coupling portion 118 is not formed on the rotor core 332 of the third embodiment, and the inner peripheral core 121 and the magnetic pole portion core 122 are integrated only by the inner coupling portion 117. . This is a difference from the first embodiment described above.
- the inner connecting portion 117 is formed in a region that is 1/4 with respect to the entire axial direction where the inner connecting portion 117 is formed. It becomes a form.
- the rotor core 332 is not formed with the outer peripheral coupling portion 118 (see FIG. 5), but protrudes toward the magnet housing portion 120 side and along the circumferential direction on the outer peripheral portion of the magnetic pole portion core 122.
- a claw portion 131 is formed. The claw portion 131 can prevent the permanent magnet 33 (not shown in FIG. 12) from coming out of the rotor core 332 radially outward.
- the area of the permanent magnet 33 exposed on the outer peripheral surface 332a of the rotor core 332 is increased by the amount that the outer peripheral connecting portion 118 is not formed. For this reason, in addition to the effect similar to 1st Embodiment mentioned above, the magnetic characteristic of the rotor 309 can be improved.
- FIG. 13 is a perspective view of the rotor core 432 in the fourth embodiment.
- FIG. 13 corresponds to FIG. 5 described above.
- the fourth embodiment is easily compared with the second embodiment described above, and is therefore compared with the second embodiment. That is, as shown in FIGS. 11 and 13, the difference between the second embodiment described above and the fourth embodiment is that the outer peripheral connecting portion 118 is formed in the second embodiment described above. In the fourth embodiment, the outer peripheral connecting portion 118 is not formed, and the inner peripheral core 121 and the magnetic pole portion core 122 are integrated only by the inner connecting portion 117.
- the rotor core 432 is not formed with the outer peripheral coupling portion 118 (see FIG. 11), but protrudes toward the magnet housing portion 120 side and along the circumferential direction on the outer peripheral portion of the magnetic pole portion core 122.
- a claw portion 131 is formed. The claw portion 131 can prevent the permanent magnet 33 (not shown in FIG. 13) from coming out of the rotor core 332 radially outward. Even when configured in this manner, the same effects as those of the third embodiment described above can be obtained.
- the present invention is not limited to the above-described embodiment, and includes various modifications made to the above-described embodiment without departing from the spirit of the present invention.
- the motor 1 with a reduction gear is a drive source for electrical components (for example, a power window, a sunroof, an electric seat, etc.) mounted on the vehicle has been described.
- the motor 1 with a reduction gear can be used for various uses. Further, it is possible to use the motor unit 2 alone for various devices without providing the speed reduction unit 3.
- the present invention is not limited to this, and the number of magnet storage portions 120 of the rotor cores 32, 232, 332, and 432 and the number of permanent magnets 33 can be arbitrarily set.
- the concave portion 119 is formed in the inner peripheral core 121 of the rotor cores 32, 232, 332, and 432 and the concave portion 119 functions as a flux barrier 119a that makes it difficult for magnetic flux to pass therethrough has been described.
- the invention is not limited to this, and the recess 119 may be filled with an insulating material such as resin.
- the rotor cores 32, 232, 332, and 432 are formed by stacking a plurality of electromagnetic steel plates (intermediate electromagnetic steel plates 111a and end electromagnetic steel plates 112a) has been described.
- the present invention is not limited to this, and it is sufficient that the rotor cores 32, 232, 332, and 432 can be finally formed. That is, for example, the rotor cores 32, 232, 332, and 432 may have a so-called dust core structure in which soft magnetic powder is pressure-molded.
- the inner connection part and the outer periphery connection part that cause leakage magnetic flux are not formed over the entire axial direction, but are formed as a part of the inner connection part and the outer periphery connection part as a whole.
- the magnetic path can be reduced. For this reason, it is possible to suppress a decrease in the magnetic characteristics of the rotor due to the leakage magnetic flux while securing a necessary thickness as the thickness in the circumferential direction of the inner coupling portion and the outer circumferential coupling portion.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
回転軸に外嵌固定される筒状の内周コア(121)と、内周コア(121)の外周面に、径方向の一端が当接するように、且つ周方向に所定の間隔をあけて配置される複数の永久磁石(33)と、周方向で隣接する永久磁石(33)の間を埋めるように設けられ、磁路を形成する複数の磁極部コア(122)と、を備え、内周コア(121)と複数の磁極部コア(122)との一部を連結する内連結部(117)、および周方向で隣接する複数の磁極部コア(122)同士の一部を永久磁石(33)の径方向外側で連結する外周連結部(118)、の少なくとも何れか一方の連結部(117),(118)を有する。
Description
本発明は、ロータおよび電動モータに関するものである。
従来から、電動モータとして、コイルが巻回されたティースを有するステータと、ステータの径方向内側に回転自在に設けられたロータと、を備えているブラシレスモータが知られている。このブラシレスモータは、コイルへの通電制御を行うことによりロータを回転駆動させる。
この種のブラシレスモータのロータは、回転軸と、この回転軸に外嵌固定される略円柱状のロータコアと、ロータコアに設けられたマグネットとを有している。
マグネットをロータに配置する方式としては、磁性体よりなるロータコアにスリットを複数形成し、スリット内に永久磁石を配置する永久磁石埋込方式(IPM:Interior Permanent Magnet)が知られている。
マグネットをロータに配置する方式としては、磁性体よりなるロータコアにスリットを複数形成し、スリット内に永久磁石を配置する永久磁石埋込方式(IPM:Interior Permanent Magnet)が知られている。
また、近年では、IPMモータの中でも、ロータコア内に径方向に沿うように(放射状に)永久磁石を配置し、永久磁石に磁気異方性の強い形状を持たせることによって大きなリラクタンストルクを発生させるPMR(Permanent Magnetic Reluctance)モータが知られている。
ところで、PMRモータは、ロータコアの磁気回路が磁束を集中させる構造上、漏れ磁束となる箇所をできる限り減少させることが望ましい。例えば、各永久磁石の径方向内側端において、周方向で隣り合う永久磁石の間の間隔をできる限り狭めて配置すると、この箇所のロータコアの肉厚が薄くなり、磁気飽和する。この結果、永久磁石の径方向内側での漏れ磁束を低減でき、ロータの磁気特性を向上できる。
しかしながら、ロータコアに肉厚の薄い箇所ができると、その薄肉箇所の剛性が低くなる。このため、ロータが回転する際の遠心力によってロータコアが変形してしまう可能性があった。
しかしながら、ロータコアに肉厚の薄い箇所ができると、その薄肉箇所の剛性が低くなる。このため、ロータが回転する際の遠心力によってロータコアが変形してしまう可能性があった。
本発明は、漏れ磁束による磁気特性の低下を抑えつつ、剛性を確保できるロータおよび電動モータを提供する。
本発明に係るロータは、回転軸に外嵌固定される筒状の内周コアと、前記内周コアの外周面に、径方向の一端が当接するように、且つ周方向に所定の間隔をあけて配置される複数の永久磁石と、周方向で隣接する前記永久磁石の間を埋めるように設けられ、磁路を形成する複数の磁極部コアと、を備え、前記内周コアと前記複数の磁極部コアとの一部を連結する内連結部、および周方向で隣接する前記複数の磁極部コア同士の一部を前記永久磁石の径方向外側で連結する外周連結部、の少なくとも何れか一方の連結部を有する。
このように、漏れ磁束の要因となる内連結部や外周連結部を、軸方向全体に渡って形成せずに、一部に形成する。これにより、内連結部や外周連結部全体としての磁路を減少させることができる。このため、内連結部や外周連結部の周方向における肉厚として、必要な肉厚を確保しつつ、漏れ磁束によるロータの磁気特性の低下を抑えることができる。
本発明に係るロータは、複数の電磁鋼板を積層してなる中間コア、および該中間コアの軸方向両側に配置されるエンドコアと、を備え、前記中間コアは、前記内周コアおよび前記磁極部コアからなり、前記エンドコアは、前記内周コア、前記磁極部コア、前記内連結部、および前記外周連結部からなる。
このように構成することで、中間コアとエンドコアとを積層するだけでロータを形成することが可能になる。このため、ロータの製造コストを低減できる。
また、比較的磁束密度の高い軸方向中央の大部分に、内連結部と外周連結部のない中間コアが配置される。このため、効果的に磁束漏れを低減できると共に、ロータの外周面に効果的に永久磁石を露出させることができる。よって、ロータの剛性を確保しつつ、ロータの磁気特性を最大限高めることができる。
また、比較的磁束密度の高い軸方向中央の大部分に、内連結部と外周連結部のない中間コアが配置される。このため、効果的に磁束漏れを低減できると共に、ロータの外周面に効果的に永久磁石を露出させることができる。よって、ロータの剛性を確保しつつ、ロータの磁気特性を最大限高めることができる。
本発明に係るロータにおいて、前記中間コアと前記エンドコアとの比率は、8:2に設定されている。
このように構成することで、ロータの剛性を確実に確保しつつ、ロータの磁気特性を確実に高めることができる。
本発明に係るロータは、前記内周コアには、該内周コアと前記永久磁石との間に複数の空洞部が形成されるように、複数の凹部が形成されている。
このように構成することで、内周コア側への磁束漏れを低減できる。
本発明に係るロータにおいて、前記凹部は、各前記永久磁石の径方向内側端における周方向両側にそれぞれ形成されており、前記内連結部は、周方向で隣り合う前記永久磁石の間で、且つ周方向で隣り合う前記凹部の間に配置されている。
このように構成することで、内連結部の形成箇所をできる限り減少させると共に、内周コア側への磁束漏れを確実に低減できる。
本発明に係るロータにおいて、各前記内連結部は、軸方向全体に対して1/4の領域に形成されている。
このように構成することで、ロータの剛性を確保しつつ、内連結部による磁束漏れを最小限に抑えることができる。
本発明に係るロータにおいて、前記内連結部の周方向の幅、および前記外周連結部の径方向の幅の少なくとも何れか一方は、磁気飽和可能な幅に設定されている。
このように構成することで、内連結部による磁束漏れを確実に抑えることができる。
本発明に係る電動モータは、上記に記載のロータと、前記ロータの周囲を取り囲むように形成された環状のステータコア、および該ステータコアの内周面から径方向内側に向かって突出し、コイルが巻回される複数のティースを有するステータと、を備えた。
このように構成することで、漏れ磁束による磁気特性の低下を抑えつつ、剛性を確保可能な電動モータを提供できる。
本発明によれば、漏れ磁束の要因となる内連結部や外周連結部を、軸方向全体に渡って形成せずに、一部に形成することにより、内連結部や外周連結部全体としての磁路を減少させることができる。このため、内連結部や外周連結部の周方向における肉厚として、必要な肉厚を確保しつつ、漏れ磁束によるロータの磁気特性の低下を抑えることができる。
次に、本発明の実施形態を図面に基づいて説明する。
(減速機付モータ)
図1は、減速機付モータ1の斜視図である。図2は、図1のA-A線に沿う断面図である。
図1、図2に示すように、減速機付モータ1は、例えば車両に搭載される電装品(例えば、ワイパ、パワーウインドウ、サンルーフ、電動シート等)の駆動源となる。減速機付モータ1は、モータ部2と、モータ部2の回転を減速して出力する減速部3と、モータ部2の駆動制御を行うコントローラ部4と、を備えている。
なお、以下の説明において、単に軸方向という場合は、モータ部2の回転軸31の軸方向をいい、単に周方向という場合は、回転軸31の周方向をいい、単に径方向という場合は、回転軸31の径方向をいうものとする。
図1は、減速機付モータ1の斜視図である。図2は、図1のA-A線に沿う断面図である。
図1、図2に示すように、減速機付モータ1は、例えば車両に搭載される電装品(例えば、ワイパ、パワーウインドウ、サンルーフ、電動シート等)の駆動源となる。減速機付モータ1は、モータ部2と、モータ部2の回転を減速して出力する減速部3と、モータ部2の駆動制御を行うコントローラ部4と、を備えている。
なお、以下の説明において、単に軸方向という場合は、モータ部2の回転軸31の軸方向をいい、単に周方向という場合は、回転軸31の周方向をいい、単に径方向という場合は、回転軸31の径方向をいうものとする。
(モータ部)
モータ部2は、モータケース5と、モータケース5内に収納されている略円筒状のステータ8と、ステータ8の径方向内側に設けられ、ステータ8に対して回転可能に設けられたロータ9と、を備えている。
モータ部2は、モータケース5と、モータケース5内に収納されている略円筒状のステータ8と、ステータ8の径方向内側に設けられ、ステータ8に対して回転可能に設けられたロータ9と、を備えている。
(モータケース)
モータケース5は、例えばアルミダイキャストや鉄板等の放熱性の優れた材料にて形成されている。モータケース5は、軸方向に分割可能に構成された第1モータケース6と、第2モータケース7と、からなる。第1モータケース6および第2モータケース7は、それぞれ有底筒状に形成されている。第1モータケース6および第2モータケース7は、それぞれの開口部6a,7aを嵌合させることで内部空間を有するモータケース5を形成している。
モータケース5は、例えばアルミダイキャストや鉄板等の放熱性の優れた材料にて形成されている。モータケース5は、軸方向に分割可能に構成された第1モータケース6と、第2モータケース7と、からなる。第1モータケース6および第2モータケース7は、それぞれ有底筒状に形成されている。第1モータケース6および第2モータケース7は、それぞれの開口部6a,7aを嵌合させることで内部空間を有するモータケース5を形成している。
より詳しくは、第1モータケース6は、底部10が減速部3のギヤケース40と接合されるようにこのギヤケース40と一体成形されている。底部10の径方向略中央には、ロータ9の回転軸31を挿通可能な貫通孔10aが形成されている。
第1モータケース6の周壁部11は、軸方向からみて略正六角形となるように形成されている。周壁部11の内周面には、開口部6a側に段差により拡径形成されたステータ内嵌部18が形成されている。このステータ内嵌部18にステータ8の外周面が嵌合される。第1モータケース6の周壁部11の外周面には、開口部6a側に段差部12aを介して縮径形成された嵌合部12が形成されている。この嵌合部12は、第2モータケース7の開口部7aを嵌合するためのものである。
第1モータケース6の周壁部11は、軸方向からみて略正六角形となるように形成されている。周壁部11の内周面には、開口部6a側に段差により拡径形成されたステータ内嵌部18が形成されている。このステータ内嵌部18にステータ8の外周面が嵌合される。第1モータケース6の周壁部11の外周面には、開口部6a側に段差部12aを介して縮径形成された嵌合部12が形成されている。この嵌合部12は、第2モータケース7の開口部7aを嵌合するためのものである。
第2モータケース7の周壁部14も、第1モータケース6の周壁部11の形状に対応するように、軸方向からみて略正六角形となるように形成されている。周壁部14の外周面には、開口部7a側に全周に渡って凸条部16が形成されている。第2モータケース7の開口部7aには、段差により拡径形成された嵌合部17が形成されている。この嵌合部17と、第1モータケース6の嵌合部12とが嵌合される。第1モータケース6の段差部12aと第2モータケース7の凸条部16とが当接することにより、第1モータケース6と第2モータケース7との軸方向の相対位置が決定される。
(ステータ)
図3は、ステータ8およびロータ9の軸方向に直交する断面図である。
図2、図3に示すように、ステータ8は、筒状のコア部21と、コア部21から径方向内側に向かって突出する複数(例えば、本実施形態では6つ)のティース22と、が一体成形されたステータコア20を有している。ステータコア20は、複数の金属板を軸方向に積層することにより形成されている。なお、ステータコア20は、複数の金属板を軸方向に積層して形成する場合に限られるものではなく、例えば、軟磁性粉を加圧成形することにより形成してもよい。
図3は、ステータ8およびロータ9の軸方向に直交する断面図である。
図2、図3に示すように、ステータ8は、筒状のコア部21と、コア部21から径方向内側に向かって突出する複数(例えば、本実施形態では6つ)のティース22と、が一体成形されたステータコア20を有している。ステータコア20は、複数の金属板を軸方向に積層することにより形成されている。なお、ステータコア20は、複数の金属板を軸方向に積層して形成する場合に限られるものではなく、例えば、軟磁性粉を加圧成形することにより形成してもよい。
コア部21は、磁路を形成すると共に、ステータ8の外郭を構成している。コア部21は、2つのモータケース6,7の周壁部11,14の形状に対応するように、軸方向に直交する断面形状が略正六角形に形成されている。このコア部21の外周面が、第1モータケース6のステータ内嵌部18に内嵌される。
ティース22は、コア部21の内周面から径方向に沿って突出するティース本体101と、ティース本体101の径方向内側端から周方向に沿って延びる鍔部102と、が一体成形されたものである。鍔部102は、ティース本体101から周方向両側に延びるように形成されている。鍔部102の内周面102aは、回転軸中心C1を中心とする円弧状に形成されている。そして、周方向で隣り合う鍔部102の間に、スロット19が形成される。
また、コア部21の内周面、およびティース22は、樹脂製のインシュレータ23によって覆われている。このインシュレータ23の上から各ティース22にコイル24が巻回されている。各コイル24は、コントローラ部4からの給電により、ロータ9を回転させるための磁界を生成する。
(第1実施形態)
(ロータ)
図4は、ロータ9の斜視図である。
図2~図4に示すように、ロータ9は、回転軸31と、回転軸31に外嵌固定されている円柱状のロータコア32と、ロータコア32に周方向に等間隔で埋設されている複数(例えば、本第1実施形態では、4つ)の永久磁石33と、を備えている。回転軸31は、減速部3を構成するウォーム軸44と一体成形されている。
(ロータ)
図4は、ロータ9の斜視図である。
図2~図4に示すように、ロータ9は、回転軸31と、回転軸31に外嵌固定されている円柱状のロータコア32と、ロータコア32に周方向に等間隔で埋設されている複数(例えば、本第1実施形態では、4つ)の永久磁石33と、を備えている。回転軸31は、減速部3を構成するウォーム軸44と一体成形されている。
図5は、ロータコア32の斜視図である。
図5に示すように、ロータコア32は、複数の中間電磁鋼板111aを積層してなる中間コア111と、中間コア111の軸方向両側に配置され複数のエンド電磁鋼板112aを積層してなるエンドコア112と、により構成されている。
図5に示すように、ロータコア32は、複数の中間電磁鋼板111aを積層してなる中間コア111と、中間コア111の軸方向両側に配置され複数のエンド電磁鋼板112aを積層してなるエンドコア112と、により構成されている。
図6は、エンド電磁鋼板112aの斜視図である。
図6に示すように、エンド電磁鋼板112aは、回転軸31に外嵌固定される略円環状の内周部113と、内周部113の周囲を取り囲むように、周方向に等間隔に配置された略扇状の4つの磁極部114と、内周部113と4つの磁極部114とを連結する内連結部117と、周方向に隣接する磁極部114の円弧面114a同士を連結する外周連結部118と、が一体化されている。
図6に示すように、エンド電磁鋼板112aは、回転軸31に外嵌固定される略円環状の内周部113と、内周部113の周囲を取り囲むように、周方向に等間隔に配置された略扇状の4つの磁極部114と、内周部113と4つの磁極部114とを連結する内連結部117と、周方向に隣接する磁極部114の円弧面114a同士を連結する外周連結部118と、が一体化されている。
内周部113の内径は、回転軸31を圧入、または挿入可能な程度に設定されている。また、内周部113の外周面には、4つの凸条部115が周方向に等間隔に配置されている。凸条部115は、周方向に長い略長方形状に形成されており、その径方向外側端115aに永久磁石33の後述の下底33aが当接される。
磁極部114は、周方向に隣接する永久磁石33の間を埋めるように、軸方向平面視で略扇形となるように形成されている。磁極部114は、その円弧面114aが径方向外側を向くように配置されている。磁極部114は、円弧面114aとは反対側の先端部114bが、内周部113に形成されている凹部119の周方向略中央の位置と径方向で対向するように配置されている。
磁極部114の円弧面114aは、中間電磁鋼板111a(ロータコア32)の外周面を構成する。円弧面114aの周方向両端よりもやや手前には、それぞれ溝部116が形成されている。溝部116は、径方向内側に向かって先細りとなるように略三角状に形成されている。
このように形成された円弧面114aの溝部116よりも周方向端部側に、外周連結部118が形成されている。外周連結部118によって周方向に隣接する磁極部114の円弧面114a同士が連結されることにより、これら磁極部114と外周連結部118とに囲まれた磁石収納部120が形成される。
磁石収納部120は、磁極部114が略扇形に形成されていることから、軸方向平面視の形状が径方向内側に向かうに従って周方向の幅が漸次広くなるように等脚台形状になる。このように形成された磁石収納部120と内周部113に形成された凹部119とが、連通されている。
磁石収納部120は、磁極部114が略扇形に形成されていることから、軸方向平面視の形状が径方向内側に向かうに従って周方向の幅が漸次広くなるように等脚台形状になる。このように形成された磁石収納部120と内周部113に形成された凹部119とが、連通されている。
内周部113の周方向で隣接する凸条部115間の中央に、それぞれ内連結部117が一体成形されている。内連結部117は径方向に沿って延びており、内周部113と各磁極部114の先端部114bとを連結している。これにより、内連結部117を介して内周部113と4つの磁極部114とが一体化される。内連結部117は、径方向に沿って延びる棒状である。内連結部117の軸方向に沿う断面形状は、略正方形状になる。内連結部117が形成されることにより、この内連結部117と凸条部115との間に、それぞれ凹部119が形成された形になる。
このように、内周部113、4つの磁極部114、4つの内連結部117、および4つの外周連結部118とが一体化されたエンド電磁鋼板112aを、複数(例えば、本第1実施形態では4枚)積層する。さらに、例えばカシメ固定等によって各エンド電磁鋼板112aを一体化することにより、エンドコア112が形成される。
図7は、中間電磁鋼板111aの斜視図である。
図7に示すように、中間電磁鋼板111aは、回転軸31に外嵌固定される略円環状の内周部113と、内周部113の周囲を取り囲むように、周方向に等間隔に配置された略扇状の4つの磁極部114と、が分割構成されている。すなわち、中間電磁鋼板111aは、エンド電磁鋼板112aから内連結部117と外周連結部118とを除いたものである。なお、中間電磁鋼板111aの内周部113、および磁極部114は、エンド電磁鋼板112aの内周部113、および磁極部114と同様の構成であるので、同一符号を付して説明を省略する。
図7に示すように、中間電磁鋼板111aは、回転軸31に外嵌固定される略円環状の内周部113と、内周部113の周囲を取り囲むように、周方向に等間隔に配置された略扇状の4つの磁極部114と、が分割構成されている。すなわち、中間電磁鋼板111aは、エンド電磁鋼板112aから内連結部117と外周連結部118とを除いたものである。なお、中間電磁鋼板111aの内周部113、および磁極部114は、エンド電磁鋼板112aの内周部113、および磁極部114と同様の構成であるので、同一符号を付して説明を省略する。
このように、内周部113と4つの磁極部114とがそれぞれ分割構成された中間電磁鋼板111aを、複数(例えば、本実施形態では32枚)積層してカシメ固定することにより、中間コア111が形成される。
ここで、中間コア111は、それ自体では積層された内周部113と各磁極部114とが分割されたままである。しかしながら、中間コア111の軸方向両端にエンドコア112が配置され、例えばカシメ固定により中間コア111とエンドコア112とが一体化されている。このため、図5に示すように、エンドコア112を介し、中間コア111の内周部113および各磁極部114が一体化され、さらにロータコア32が構成される。
ここで、中間コア111は、それ自体では積層された内周部113と各磁極部114とが分割されたままである。しかしながら、中間コア111の軸方向両端にエンドコア112が配置され、例えばカシメ固定により中間コア111とエンドコア112とが一体化されている。このため、図5に示すように、エンドコア112を介し、中間コア111の内周部113および各磁極部114が一体化され、さらにロータコア32が構成される。
図5に示すように、ロータコア32は、内周部113を積層してなる略円筒状の内周コア121と、磁極部114を積層してなる軸方向に延在する4つの磁極部コア122と、内周コア121と磁極部コア122とを連結する内連結部117と、周方向に隣接する磁極部コア122同士を連結する外周連結部118と、を備えた形になる。
回転軸31に内周コア121が外嵌固定されることにより、回転軸31にロータコア32全体が固定される。磁極部コア122は、永久磁石33による磁束やステータ8により形成される磁束の通り道となる。
回転軸31に内周コア121が外嵌固定されることにより、回転軸31にロータコア32全体が固定される。磁極部コア122は、永久磁石33による磁束やステータ8により形成される磁束の通り道となる。
ロータコア32の内連結部117、および外周連結部118には、それぞれ中間コア111に対応する位置に、開口部117a,118aが形成された形になる。ロータコア32の外周面32aには、各磁石収納部120の周方向両側に、溝部116が軸方向全体に延びるように形成された形になる。
ここで、図3に詳細示するように、磁石収納部120を挟んで周方向両側に位置する2つの溝部116は、周方向中心間の円周長さL1が、ティース22の鍔部102における内周面の円周長さL2よりも長く設定されている。
ここで、図3に詳細示するように、磁石収納部120を挟んで周方向両側に位置する2つの溝部116は、周方向中心間の円周長さL1が、ティース22の鍔部102における内周面の円周長さL2よりも長く設定されている。
このように構成されたロータコア32の磁石収納部120に、永久磁石33が嵌め込まれている。永久磁石33は、磁石収納部120の形状に対応するように、軸方向に直交する断面形状が径方向内側に向かうに従って周方向の幅が漸次広くなるように等脚台形状となるように形成されている。すなわち、永久磁石33は、軸方向に直交する断面形状において、径方向内側に位置する下底33aと、径方向外側に位置する上底33bと、下底33aと上底33bとの間に位置する一対の脚33cと、を有している。
永久磁石33は、パラレル配向、または極異方配向に着磁されており、形状が等脚台形状となるように形成されていることから、磁束を収束させるための配向の向きが、ロータコア32の外周側(ステータ8のティース22側)となる。この結果、磁極部コア122における磁束の向きが、ティース22側へと収束させやすくできる。さらに、周方向で隣り合う永久磁石33同士を近づけることなく、磁極部コア122内において磁束を集中させることができる。そして、q軸磁路を大きく設定でき、高いリラクタンストルクを発生させることができる。よって、ロータコア32の有効磁束を高めることができる。
磁石収納部120に永久磁石33を収納した状態では、上底33bが、ロータコア32の外周面32aの開口部118aを介して径方向外側に露出した状態になる。
一方、永久磁石33の下底33aは、ロータコア32の凸条部115の径方向外側端115aに当接している。このため、永久磁石33の下底33aとロータコア32の内周コア121との間には、下底33aの周方向両側に、それぞれ凹部119が介在される。すなわち、凹部119は、磁束を通りにくくするフラックスバリア(空洞部)119aとして機能する。
一方、永久磁石33の下底33aは、ロータコア32の凸条部115の径方向外側端115aに当接している。このため、永久磁石33の下底33aとロータコア32の内周コア121との間には、下底33aの周方向両側に、それぞれ凹部119が介在される。すなわち、凹部119は、磁束を通りにくくするフラックスバリア(空洞部)119aとして機能する。
内連結部117は、周方向で隣り合う永久磁石33の間で、且つ周方向で隣り合う凹部119の間に配置される。ここで、内連結部117の周方向の幅H1は、ロータコア32の剛性を確保可能な範囲で、できる限り狭いことが望ましい。さらには、内連結部117の幅H1は、永久磁石33の磁束が飽和可能な幅に設定されていることが望ましい。
(減速部)
図1、図2に戻り、減速部3は、モータケース5が取り付けられているギヤケース40と、ギヤケース40内に収納されるウォーム減速機構41と、を備えている。ギヤケース40は、例えばアルミダイキャスト等の放熱性の優れた材料により形成されている。ギヤケース40は、一面に開口部40aを有する箱状に形成されており、内部にウォーム減速機構41を収容するギヤ収容部42を有する。ギヤケース40の側壁40bには、第1モータケース6が一体成形されている箇所に、この第1モータケース6の貫通孔10aとギヤ収容部42とを連通する開口部43が形成されている。
図1、図2に戻り、減速部3は、モータケース5が取り付けられているギヤケース40と、ギヤケース40内に収納されるウォーム減速機構41と、を備えている。ギヤケース40は、例えばアルミダイキャスト等の放熱性の優れた材料により形成されている。ギヤケース40は、一面に開口部40aを有する箱状に形成されており、内部にウォーム減速機構41を収容するギヤ収容部42を有する。ギヤケース40の側壁40bには、第1モータケース6が一体成形されている箇所に、この第1モータケース6の貫通孔10aとギヤ収容部42とを連通する開口部43が形成されている。
ギヤケース40の側壁40bには、3つの固定ブラケット54a,54b,54cが一体成形されている。これら固定ブラケット54a,54b,54cは、不図示の車体等に、減速機付モータ1を固定する。3つの固定ブラケット54a,54b,54cは、モータ部2を避けるように、周方向にほぼ等間隔に配置されている。各固定ブラケット54a,54b,54cには、それぞれ防振ゴム55が装着されている。防振ゴム55は、減速機付モータ1を駆動する際の振動が、不図示の車体に伝達されてしまうのを防止する。
また、ギヤケース40の底壁40cには、略円筒状の軸受ボス49が突設されている。軸受ボス49は、ウォーム減速機構41の出力軸48を回転自在に支持するためのものであって、内周面に不図示の滑り軸受が設けられている。軸受ボス49の先端内周縁には、不図示のOリングが装着されている。これにより、軸受ボス49を介して外部から内部に塵埃や水が侵入してしまうことが防止される。また、軸受ボス49の外周面には、複数のリブ52が設けられている。これにより、軸受ボス49の剛性が確保されている。
ギヤ収容部42に収容されたウォーム減速機構41は、ウォーム軸44と、ウォーム軸44に噛合されるウォームホイール45と、により構成されている。ウォーム軸44は、モータ部2の回転軸31と同軸上に配置されている。ウォーム軸44は、両端がギヤケース40に設けられた軸受46,47によって回転自在に支持されている。ウォーム軸44のモータ部2側の端部は、軸受46を介してギヤケース40の開口部43に至るまで突出している。この突出したウォーム軸44の端部とモータ部2の回転軸31との端部が接合され、ウォーム軸44と回転軸31とが一体化されている。なお、ウォーム軸44と回転軸31は、1つの母材からウォーム軸部分と回転軸部分とを成形することにより一体として形成してもよい。
ウォーム軸44に噛合されるウォームホイール45には、このウォームホイール45の径方向中央に出力軸48が設けられている。出力軸48は、ウォームホイール45の回転軸方向と同軸上に配置されている。出力軸48は、ギヤケース40の軸受ボス49を介してギヤケース40の外部に突出している。出力軸48の突出した先端には、不図示の電装品と接続可能なスプライン48aが形成されている。
また、ウォームホイール45の径方向中央には、出力軸48が突出されている側とは反対側に、不図示のセンサマグネットが設けられている。このセンサマグネットは、ウォームホイール45の回転位置を検出する回転位置検出部60の一方を構成している。この回転位置検出部60の他方を構成する磁気検出素子61は、ウォームホイール45のセンサマグネット側(ギヤケース40の開口部40a側)でウォームホイール45と対向配置されているコントローラ部4に設けられている。
(コントローラ部)
モータ部2の駆動制御を行うコントローラ部4は、磁気検出素子61が実装されたコントローラ基板62と、ギヤケース40の開口部40aを閉塞するように設けられたカバー63と、を有している。そして、コントローラ基板62が、ウォームホイール45のセンサマグネット側(ギヤケース40の開口部40a側)に対向配置されている。
モータ部2の駆動制御を行うコントローラ部4は、磁気検出素子61が実装されたコントローラ基板62と、ギヤケース40の開口部40aを閉塞するように設けられたカバー63と、を有している。そして、コントローラ基板62が、ウォームホイール45のセンサマグネット側(ギヤケース40の開口部40a側)に対向配置されている。
コントローラ基板62は、いわゆるエポキシ基板に複数の導電性のパターン(不図示)が形成されている。コントローラ基板62には、モータ部2のステータコア20から引き出されたコイル24の端末部が接続されていると共に、カバー63に設けられたコネクタの端子(何れも不図示)が電気的に接続されている。コントローラ基板62には、磁気検出素子61の他に、コイル24に供給する電流を制御するFET(Field Effect Transistor:電界効果トランジスタ)等のスイッチング素子からなるパワーモジュールやコントローラ基板に印加される電圧の平滑化を行うコンデンサ(何れも不図示)等が実装されている。
このように構成されたコントローラ基板62を覆うカバー63は、樹脂製である。カバー63は、若干外側に膨出するように形成されている。カバー63の内面側は、コントローラ基板62等を収容するコントローラ収容部56とされている。
また、カバー63の外周部に、不図示のコネクタが一体成形されている。このコネクタは、不図示の外部電源から延びるコネクタと嵌着可能に形成されている。そして、不図示のコネクタの端子に、コントローラ基板62が電気的に接続されている。これにより、外部電源の電力がコントローラ基板62に供給される。
また、カバー63の外周部に、不図示のコネクタが一体成形されている。このコネクタは、不図示の外部電源から延びるコネクタと嵌着可能に形成されている。そして、不図示のコネクタの端子に、コントローラ基板62が電気的に接続されている。これにより、外部電源の電力がコントローラ基板62に供給される。
カバー63の開口縁には、ギヤケース40の側壁40bの端部と嵌め合いされる嵌合部81が突出形成されている。嵌合部81は、カバー63の開口縁に沿う2つの壁81a,81bにより構成されている。これら2つの壁81a,81bの間に、ギヤケース40の側壁40bの端部が挿入(嵌め合い)される。これにより、ギヤケース40とカバー63との間にラビリンス部83が形成される。このラビリンス部83によって、ギヤケース40とカバー63との間から塵埃や水が浸入してしまうことが防止される。なお、ギヤケース40とカバー63との固定は、不図示のボルトを締結することにより行われる。
(減速機付モータの動作)
次に減速機付モータ1の動作について説明する。
減速機付モータ1は、不図示のコネクタを介してコントローラ基板62に供給された電力が、不図示のパワーモジュールを介してモータ部2の各コイル24に選択的に供給される。すると、ステータ8(ティース22)に所定の磁界が形成され、この磁界とロータ9の永久磁石33との間で磁気的な吸引力や反発力が生じる。これにより、ロータ9が継続的に回転する。
次に減速機付モータ1の動作について説明する。
減速機付モータ1は、不図示のコネクタを介してコントローラ基板62に供給された電力が、不図示のパワーモジュールを介してモータ部2の各コイル24に選択的に供給される。すると、ステータ8(ティース22)に所定の磁界が形成され、この磁界とロータ9の永久磁石33との間で磁気的な吸引力や反発力が生じる。これにより、ロータ9が継続的に回転する。
ロータ9が回転すると、回転軸31と一体化されているウォーム軸44が回転し、さらにウォーム軸44に噛合されているウォームホイール45が回転する。そして、ウォームホイール45に連結されている出力軸48が回転し、所望の電装品が駆動する。
コントローラ基板62に実装されている磁気検出素子61によって検出されたウォームホイール45の回転位置検出結果は、信号として不図示の外部機器に出力される。不図示の外部機器は、ウォームホイール45の回転位置検出信号に基づいて、不図示のパワーモジュールのスイッチング素子等の切替えタイミングが制御され、モータ部2の駆動制御が行われる。なお、パワーモジュールの駆動信号の出力やモータ部2の駆動制御は、コントローラ部4で行われていても良い。
(ロータの作用、効果)
次に、ロータ9の作用、効果について説明する。
ロータ9のロータコア32は、回転軸31に外嵌固定される内周コア121と、磁極を構成する磁極部コア122と、内周コア121と磁極部コア122とを連結する内連結部117と、周方向に隣接する磁極部コア122同士を連結する外周連結部118と、により構成されている。このうち、内連結部117、および外周連結部118には、開口部117a,118aが形成されている。すなわち、内連結部117は、内周コア121と磁極部コア122との一部を連結している。また、外周連結部118は、磁極部コア122同士の一部を連結している。
次に、ロータ9の作用、効果について説明する。
ロータ9のロータコア32は、回転軸31に外嵌固定される内周コア121と、磁極を構成する磁極部コア122と、内周コア121と磁極部コア122とを連結する内連結部117と、周方向に隣接する磁極部コア122同士を連結する外周連結部118と、により構成されている。このうち、内連結部117、および外周連結部118には、開口部117a,118aが形成されている。すなわち、内連結部117は、内周コア121と磁極部コア122との一部を連結している。また、外周連結部118は、磁極部コア122同士の一部を連結している。
このように、漏れ磁束の要因となる内連結部117や外周連結部118を、軸方向全体に渡って形成せずに、一部に形成することにより、内連結部117や外周連結部118全体としての磁路を減少させることができる。このため、内連結部117や外周連結部118の周方向における肉厚として、必要な肉厚を確保しつつ、漏れ磁束によるロータ9の磁気特性の低下を抑えることができる。
また、内連結部117、および外周連結部118に開口部117a,118aを形成するにあたり、ロータコア32を、内周部113と磁極部114とが分割構成された中間コア111と、これら内周部113や磁極部114を連結する内連結部117および外周連結部118を有するエンドコア112と、により構成している。このため、これら中間コア111とエンドコア112を積層するだけで、開口部117a,118aを有するロータコア32を形成することができる。このため、ロータ9の製造コストを低減できる。
ここで、永久磁石33は、軸方向両端の磁束密度が軸方向中央の大部分の磁束密度よりも減少しやすい。このため、比較的磁束密度の高い永久磁石33の軸方向中央の大部分に対応する箇所に、内連結部117と外周連結部118のない中間コア111を配置することにより、ロータコア32の磁束漏れを効果的に低減できる。また、ロータコア32の外周面32aに効果的に永久磁石33を露出させることができる。よって、ロータ9の剛性を確保しつつ、ロータ9の磁気特性を最大限高めることができる。
さらに、本第1実施形態では、中間コア111を32枚の中間電磁鋼板111aにより構成し、エンドコア112を4枚のエンド電磁鋼板112aにより構成している。換言すれば、ロータコア32を構成する中間コア111とエンドコア112との比率は、8:2に設定されている。これを、内連結部117のみでいうと、内連結部117は、この内連結部117が形成される箇所の軸方向全体に対して1/4の領域に形成されている形になる。また、外周連結部118のみでいうと、外周連結部118は、この外周連結部118が形成される箇所の軸方向全体に対して1/4の領域に形成されている形になる。
このように構成することで、ロータコア32の剛性を確実に確保しつつ、ロータコア32の磁気特性を確実に高めることができる。このことについて、以下により詳しく説明する。
このように構成することで、ロータコア32の剛性を確実に確保しつつ、ロータコア32の磁気特性を確実に高めることができる。このことについて、以下により詳しく説明する。
図8は、中間コア111とエンドコア112との比率別(0:10,5:5,8:2)におけるロータコア32の有効磁束量を比較したグラフである。
図8に示すように、中間コア111とエンドコア112との比率が8:2のとき、優れた有効磁束量を得られることが確認できる。
図8に示すように、中間コア111とエンドコア112との比率が8:2のとき、優れた有効磁束量を得られることが確認できる。
図9は、中間コア111とエンドコア112との比率が8:2のとき、ロータコア32を回転させた際にかかる応力の解析結果を示す図である。
図9に示すように、エンドコア112の内連結部117、および外周連結部118により、磁極部コア122や永久磁石33が飛散することなく、ロータコア32に十分な強度を持たせられることが確認できる。
図9に示すように、エンドコア112の内連結部117、および外周連結部118により、磁極部コア122や永久磁石33が飛散することなく、ロータコア32に十分な強度を持たせられることが確認できる。
ロータコア32の内周コア121(内周部113)に凹部119を形成することにより、永久磁石33の下底33aとロータコア32の内周コア121との間に、フラックスバリア119aが形成される。このため、永久磁石33の内周コア121側への磁束漏れをより確実に低減できる。
このように、凹部119は、各永久磁石33の下底33aの周方向両側にそれぞれ形成される。また、内連結部117は、周方向で隣り合う永久磁石33の間で、且つ周方向で隣り合う凹部119の間に配置される。このため、内連結部117の配置箇所を最小限としつつ、内周コア121と磁極部コア122とを一体化できる。よって、ロータコア32を十分な強度を確保して一体化しつつ、永久磁石33の磁束漏れをできる限り低減できる。
さらに、内連結部117の周方向の幅H1を、永久磁石33の磁束が飽和可能な幅に設定することにより、永久磁石33の内周コア121側への磁束漏れを確実に低減できる。
さらに、内連結部117の周方向の幅H1を、永久磁石33の磁束が飽和可能な幅に設定することにより、永久磁石33の内周コア121側への磁束漏れを確実に低減できる。
また、ロータコア32の外周面32aには、各磁石収納部120の周方向両側に、溝部116が軸方向全体に延びるように形成されている。また、磁石収納部120を挟んで周方向両側に位置する2つの溝部116は、周方向中心間の円周長さL1が、ティース22の鍔部102における内周面の円周長さL2よりも長く設定されている。溝部116が形成されている箇所では、ロータコア32とステータ8のティース22との間のギャップが大きくなる。このため、溝部116では、ロータコア32の磁束によるティース22への影響が小さくなる。すなわち、ロータコア32の外周面32aにおいて、溝部116を形成することにより、永久磁石33が配置されている箇所と、これ以外の箇所と、による磁束の急激な変化を抑制でき、ロータ9のコギングを抑制できる。
(第2実施形態)
(ロータ)
次に、図10、図11に基づいて、第2実施形態について説明する。
図10は、第2実施形態におけるロータ209の斜視図である。また、図10は、前述の図4に対応している。図11は、第2実施形態におけるロータコア232の斜視図である。また、図11は、前述の図5に対応している。
(ロータ)
次に、図10、図11に基づいて、第2実施形態について説明する。
図10は、第2実施形態におけるロータ209の斜視図である。また、図10は、前述の図4に対応している。図11は、第2実施形態におけるロータコア232の斜視図である。また、図11は、前述の図5に対応している。
図10、図11に示すように、前述の第1実施形態と本第2実施形態との相違点は、第1実施形態のロータコア32は、中間コア111と、この中間コア111の軸方向両側に配置されたエンドコア112と、により構成されているのに対し、第2実施形態のロータコア232は、中間コア111を構成する中間電磁鋼板111aとエンドコア112を構成するエンド電磁鋼板112aとが交互に積層されている点にある。なお、ロータコア232の軸方向両端には、それぞれエンド電磁鋼板112aが配置されている。
このように構成した場合であっても、永久磁石33の磁束漏れの要因となる内連結部117および外周連結部118の体積を減少させることができるので、前述の第1実施形態と同様の効果を奏する。
このように構成した場合であっても、永久磁石33の磁束漏れの要因となる内連結部117および外周連結部118の体積を減少させることができるので、前述の第1実施形態と同様の効果を奏する。
(第3実施形態)
(ロータコア)
次に、図12に基づいて、第3実施形態について説明する。
図12は、第3実施形態におけるロータコア332の斜視図である。また、図12は、前述の図5に対応している。
図12に示すように、第3実施形態のロータコア332には、外周連結部118が形成されておらず、内周コア121と磁極部コア122とが内連結部117のみで一体化されている。この点、前述の第1実施形態と相違する点である。
(ロータコア)
次に、図12に基づいて、第3実施形態について説明する。
図12は、第3実施形態におけるロータコア332の斜視図である。また、図12は、前述の図5に対応している。
図12に示すように、第3実施形態のロータコア332には、外周連結部118が形成されておらず、内周コア121と磁極部コア122とが内連結部117のみで一体化されている。この点、前述の第1実施形態と相違する点である。
ここで、内連結部117に開口部117aが形成されることにより、内連結部117は、この内連結部117が形成される箇所の軸方向全体に対して1/4の領域に形成されている形になる。
また、ロータコア332には、外周連結部118(図5参照)が形成されていない代わりに、磁極部コア122の外周部に、磁石収納部120側に向かって、且つ周方向に沿って突出する爪部131が形成されている。この爪部131により、ロータコア332から永久磁石33(図12では不図示)が径方向外側に向かって抜け出てしまうことを防止できる。
また、ロータコア332には、外周連結部118(図5参照)が形成されていない代わりに、磁極部コア122の外周部に、磁石収納部120側に向かって、且つ周方向に沿って突出する爪部131が形成されている。この爪部131により、ロータコア332から永久磁石33(図12では不図示)が径方向外側に向かって抜け出てしまうことを防止できる。
このように、上述の第3実施形態では、外周連結部118が形成されていない分、ロータコア332の外周面332aに露出する永久磁石33の面積が大きくなる。このため、前述の第1実施形態と同様の効果に加え、ロータ309の磁気特性を向上させることができる。
(第4実施形態)
(ロータコア)
次に、図13に基づいて、第4実施形態について説明する。
図13は、第4実施形態におけるロータコア432の斜視図である。また、図13は、前述の図5に対応している。
本第4実施形態は、前述の第2実施形態との比較が分かり易いので、第2実施形態と比較する。すなわち、図11、図13に示すように、前述の第2実施形態と本第4実施形態との相違点は、前述の第2実施形態では、外周連結部118が形成されているのに対し、本第4実施形態では、外周連結部118が形成されておらず、内周コア121と磁極部コア122とが内連結部117のみで一体化されている点にある。
(ロータコア)
次に、図13に基づいて、第4実施形態について説明する。
図13は、第4実施形態におけるロータコア432の斜視図である。また、図13は、前述の図5に対応している。
本第4実施形態は、前述の第2実施形態との比較が分かり易いので、第2実施形態と比較する。すなわち、図11、図13に示すように、前述の第2実施形態と本第4実施形態との相違点は、前述の第2実施形態では、外周連結部118が形成されているのに対し、本第4実施形態では、外周連結部118が形成されておらず、内周コア121と磁極部コア122とが内連結部117のみで一体化されている点にある。
なお、ロータコア432には、外周連結部118(図11参照)が形成されていない代わりに、磁極部コア122の外周部に、磁石収納部120側に向かって、且つ周方向に沿って突出する爪部131が形成されている。この爪部131により、ロータコア332から永久磁石33(図13では不図示)が径方向外側に向かって抜け出てしまうことを防止できる。
このように構成した場合であっても、前述の第3実施形態と同様の効果を奏する。
このように構成した場合であっても、前述の第3実施形態と同様の効果を奏する。
なお、本発明は上述の実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲において、上述の実施形態に種々の変更を加えたものを含む。
例えば、上述の実施形態では、減速機付モータ1は、車両に搭載される電装品(例えば、パワーウインドウ、サンルーフ、電動シート等)の駆動源となるものである場合について説明した。しかしながら、これに限られるものではなく、さまざまな用途に減速機付モータ1を使用することができる。
また、減速部3を設けずに、モータ部2を単体でさまざまな装置に用いることも可能である。
例えば、上述の実施形態では、減速機付モータ1は、車両に搭載される電装品(例えば、パワーウインドウ、サンルーフ、電動シート等)の駆動源となるものである場合について説明した。しかしながら、これに限られるものではなく、さまざまな用途に減速機付モータ1を使用することができる。
また、減速部3を設けずに、モータ部2を単体でさまざまな装置に用いることも可能である。
さらに、上述の実施形態では、ロータコア32,232,332,432に4つの磁石収納部120を形成し、ロータコア32,232,332,432に永久磁石33を4つ設けた場合について説明した。しかしながら、これに限られるものではなく、ロータコア32,232,332,432の磁石収納部120の個数、および永久磁石33の個数は、任意に設定することができる。
また、上述の実施形態では、ロータコア32,232,332,432の内周コア121に凹部119を形成し、この凹部119を、磁束を通りにくくするフラックスバリア119aとして機能させる場合について説明した。しかしながら、これに限られるものではなく、凹部119に樹脂等の絶縁材を充填してもよい。このように構成することで、永久磁石33の径方向内側(内周コア121側)への磁束漏れを抑制しつつ、ロータコア32,232,332,432の剛性を高めることができる。
さらに、上述の実施形態では、複数の電磁鋼板(中間電磁鋼板111a、エンド電磁鋼板112a)を積層して、ロータコア32,232,332,432を形成する場合について説明した。しかしながら、これに限られるものではなく、最終的にロータコア32,232,332,432のような形状を形成できればよい。すなわち、例えば、ロータコア32,232,332,432を、軟磁性粉を加圧成形するいわゆる圧粉コア構造とすることも可能である。
上記のロータによれば、漏れ磁束の要因となる内連結部や外周連結部を、軸方向全体に渡って形成せずに、一部に形成することにより、内連結部や外周連結部全体としての磁路を減少させることができる。このため、内連結部や外周連結部の周方向における肉厚として、必要な肉厚を確保しつつ、漏れ磁束によるロータの磁気特性の低下を抑えることができる。
1…減速機付モータ、2…モータ部(電動モータ)、8…ステータ、9,209,309…ロータ、20…ステータコア、22…ティース、24…コイル、31…回転軸、32,332,432…ロータコア、33…永久磁石、111…中間コア、111a…中間電磁鋼板(電磁鋼板)、112…エンドコア、112a…エンド電磁鋼板(電磁鋼板)、113…内周部、114…磁極部、117…内連結部、118…外周連結部、119…凹部、119a…フラックスバリア(空洞部)、121…内周コア、122…磁極部コア、H1…幅
Claims (8)
- 回転軸に外嵌固定される筒状の内周コアと、
前記内周コアの外周面に、径方向の一端が当接するように、且つ周方向に所定の間隔をあけて配置される複数の永久磁石と、
周方向で隣接する前記永久磁石の間を埋めるように設けられ、磁路を形成する複数の磁極部コアと、
を備え、
前記内周コアと前記複数の磁極部コアとの一部を連結する内連結部、および周方向で隣接する前記複数の磁極部コア同士の一部を前記永久磁石の径方向外側で連結する外周連結部、の少なくとも何れか一方の連結部を有する
ロータ。 - 複数の電磁鋼板を積層してなる中間コア、および該中間コアの軸方向両側に配置されるエンドコアと、
を備え、
前記中間コアは、前記内周コアおよび前記磁極部コアからなり、
前記エンドコアは、前記内周コア、前記磁極部コア、前記内連結部、および前記外周連結部からなる
請求項1に記載のロータ。 - 前記中間コアと前記エンドコアとの比率は、8:2に設定されている請求項2に記載のロータ。
- 前記内周コアには、該内周コアと前記永久磁石との間に複数の空洞部が形成されるように、複数の凹部が形成されている
請求項1~請求項3の何れか1項に記載のロータ。 - 前記凹部は、各前記永久磁石の径方向内側端における周方向両側にそれぞれ形成されており、
前記内連結部は、周方向で隣り合う前記永久磁石の間で、且つ周方向で隣り合う前記凹部の間に配置されている
請求項4に記載のロータ。 - 各前記内連結部は、軸方向全体に対して1/4の領域に形成されている請求項5に記載のロータ。
- 前記内連結部の周方向の幅、および前記外周連結部の径方向の幅の少なくとも何れか一方は、磁気飽和可能な幅に設定されている
請求項1~請求項6の何れか1項に記載のロータ。 - 請求項1~請求項7の何れか1項に記載のロータと、
前記ロータの周囲を取り囲むように形成された環状のステータコア、および該ステータコアの内周面から径方向内側に向かって突出し、コイルが巻回される複数のティースを有するステータと、
を備えた電動モータ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017000132A JP6870989B2 (ja) | 2017-01-04 | 2017-01-04 | ロータおよび電動モータ |
| JP2017-000132 | 2017-01-04 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018128165A1 true WO2018128165A1 (ja) | 2018-07-12 |
Family
ID=62791304
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/047240 WO2018128165A1 (ja) | 2017-01-04 | 2017-12-28 | ロータおよび電動モータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6870989B2 (ja) |
| WO (1) | WO2018128165A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108777521A (zh) * | 2018-07-27 | 2018-11-09 | 北京金风科创风电设备有限公司 | 磁极模块、电机转子及制造该电机转子的方法 |
| WO2021235267A1 (ja) * | 2020-05-18 | 2021-11-25 | パナソニックIpマネジメント株式会社 | 回転子及び電動機 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115280642A (zh) * | 2020-03-18 | 2022-11-01 | 日本电产株式会社 | 马达 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08223832A (ja) * | 1995-02-15 | 1996-08-30 | Hitachi Ltd | 永久磁石回転子 |
| JP2014060835A (ja) * | 2012-09-14 | 2014-04-03 | Denso Corp | 回転電機のロータ |
| JP2014064471A (ja) * | 2014-01-17 | 2014-04-10 | Nippon Soken Inc | 回転電機 |
| JP2015042009A (ja) * | 2013-08-20 | 2015-03-02 | 日立アプライアンス株式会社 | 永久磁石型電動機、これを用いた圧縮機、及び冷凍サイクル装置 |
| JP2015065764A (ja) * | 2013-09-25 | 2015-04-09 | 株式会社ジェイテクト | 磁石埋込型ロータ |
| JP2016160866A (ja) * | 2015-03-03 | 2016-09-05 | アイチエレック株式会社 | 圧縮機 |
-
2017
- 2017-01-04 JP JP2017000132A patent/JP6870989B2/ja active Active
- 2017-12-28 WO PCT/JP2017/047240 patent/WO2018128165A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08223832A (ja) * | 1995-02-15 | 1996-08-30 | Hitachi Ltd | 永久磁石回転子 |
| JP2014060835A (ja) * | 2012-09-14 | 2014-04-03 | Denso Corp | 回転電機のロータ |
| JP2015042009A (ja) * | 2013-08-20 | 2015-03-02 | 日立アプライアンス株式会社 | 永久磁石型電動機、これを用いた圧縮機、及び冷凍サイクル装置 |
| JP2015065764A (ja) * | 2013-09-25 | 2015-04-09 | 株式会社ジェイテクト | 磁石埋込型ロータ |
| JP2014064471A (ja) * | 2014-01-17 | 2014-04-10 | Nippon Soken Inc | 回転電機 |
| JP2016160866A (ja) * | 2015-03-03 | 2016-09-05 | アイチエレック株式会社 | 圧縮機 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108777521A (zh) * | 2018-07-27 | 2018-11-09 | 北京金风科创风电设备有限公司 | 磁极模块、电机转子及制造该电机转子的方法 |
| WO2021235267A1 (ja) * | 2020-05-18 | 2021-11-25 | パナソニックIpマネジメント株式会社 | 回転子及び電動機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6870989B2 (ja) | 2021-05-12 |
| JP2018110487A (ja) | 2018-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5850263B2 (ja) | 駆動装置 | |
| US11289960B2 (en) | Motor and brushless wiper motor | |
| WO2018128165A1 (ja) | ロータおよび電動モータ | |
| JP7508629B2 (ja) | ロータ、モータ、及びワイパモータ | |
| EP3883092B1 (en) | Rotor, motor and brushless motor | |
| WO2019198462A1 (ja) | モータ及びブラシレスワイパーモータ | |
| WO2019198464A1 (ja) | モータ及びブラシレスワイパーモータ | |
| JP7077153B2 (ja) | モータ及びブラシレスワイパーモータ | |
| JP7090014B2 (ja) | ロータ、モータ、ブラシレスワイパーモータ及びロータの製造方法 | |
| KR20150030040A (ko) | 스테이터 코어 및 이를 포함하는 모터 | |
| JP2020078176A (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP6655500B2 (ja) | 電動モータ | |
| JP7287825B2 (ja) | モータ、及びワイパモータ | |
| JP6469563B2 (ja) | 回転子およびブラシレスモータ | |
| WO2020100457A1 (ja) | モータ及びブラシレスワイパーモータ | |
| JP2018183011A (ja) | 電動モータ及びブラシレスモータ | |
| JP6871051B2 (ja) | 同期モータ及びブラシレスモータ | |
| JP2017163731A (ja) | ロータおよび減速機付モータ | |
| JP2021027717A (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP7122944B2 (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP2019106788A (ja) | ロータおよびモータ | |
| EP3657637B1 (en) | Motor and brushless wiper motor | |
| JP2024071969A (ja) | 回転電機 | |
| JP2023161321A (ja) | 電動モータ | |
| JP2022071593A (ja) | ロータ、モータ及びブラシレスワイパーモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17890193 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17890193 Country of ref document: EP Kind code of ref document: A1 |