JP2023161321A - 電動モータ - Google Patents
電動モータ Download PDFInfo
- Publication number
- JP2023161321A JP2023161321A JP2022071637A JP2022071637A JP2023161321A JP 2023161321 A JP2023161321 A JP 2023161321A JP 2022071637 A JP2022071637 A JP 2022071637A JP 2022071637 A JP2022071637 A JP 2022071637A JP 2023161321 A JP2023161321 A JP 2023161321A
- Authority
- JP
- Japan
- Prior art keywords
- magnet
- rotor
- sub
- rotor core
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000002093 peripheral effect Effects 0.000 claims abstract description 38
- 229910000831 Steel Inorganic materials 0.000 claims description 11
- 239000010959 steel Substances 0.000 claims description 11
- 238000010030 laminating Methods 0.000 claims description 9
- 230000004907 flux Effects 0.000 abstract description 59
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 18
- 230000004323 axial length Effects 0.000 description 16
- 230000009467 reduction Effects 0.000 description 16
- 230000005415 magnetization Effects 0.000 description 13
- 239000003638 chemical reducing agent Substances 0.000 description 10
- 238000001514 detection method Methods 0.000 description 10
- 229910052742 iron Inorganic materials 0.000 description 9
- 238000003780 insertion Methods 0.000 description 8
- 230000037431 insertion Effects 0.000 description 8
- 229910000859 α-Fe Inorganic materials 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 5
- 229910052779 Neodymium Inorganic materials 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 239000012212 insulator Substances 0.000 description 3
- 239000006247 magnetic powder Substances 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- QEFYFXOXNSNQGX-UHFFFAOYSA-N neodymium atom Chemical compound [Nd] QEFYFXOXNSNQGX-UHFFFAOYSA-N 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images







Abstract
【課題】永久磁石の磁束を最大限有効活用でき、効率よく高トルク化を図ることができる電動モータを提供する。【解決手段】ステータコア本体21及びティース22からなるステータコア20を有するステータ8と、ティース22に巻回されるコイル24と、シャフト31と、シャフト31に固定され、シャフト31の回転軸線を径方向中心とするロータコア本体37を有するロータコア32と、ロータコア本体37の外周面に配置された主磁石33と、ロータコア本体37の軸方向両端面のうちの少なくとも一方の端面に配置された副磁石34と、を備え、主磁石33は、ロータコア本体37の軸方向両端面のうちの少なくとも一方の端面よりも軸方向外側に突出したオーバーハング部33gを有し、副磁石34は、オーバーハング部33gの径方向内側に配置されている。【選択図】図3
Description
本発明は、電動モータに関する。
電動モータの中には、コイルが巻回されたティースを有するステータと、ステータの径方向内側に回転自在に設けられたロータと、を備えるものがある。周方向で隣り合うティース間には、スロットが形成される。このスロットを通して各ティースにコイルが巻回される。ステータやロータは、電磁鋼板をシャフトの回転軸線方向(以下、単に軸方向という)に積層したり、軟磁性粉を加圧成形したりすることにより形成される。
ステータには、コイルに給電を行うことにより鎖交磁束が形成される。ロータは、シャフトと、このシャフトに嵌合固定される円柱状のロータコアと、ロータコアに設けられた永久磁石と、を有する。そして、ステータに形成された鎖交磁束とロータコアに設けられた永久磁石との間に磁気的な吸引力や反発力が生じ、ロータが継続的に回転される。
ここで、ロータに永久磁石を配置する方式として、ロータコアの外周面に永久磁石を配置する方式(SPM:Surface Permanent Magnet)がある。このSPM方式のロータにおいて有効磁束を増大させて高トルク化を図るために、ステータ及びロータコアにおける軸方向の長さよりも永久磁石における軸方向の長さを長くする場合がある。
ステータの軸方向一端よりも永久磁石の軸方向一端を軸方向外側に突出させることにより、ロータの有効磁束量を増大できる。このため、ステータに形成された鎖交磁束を、ロータの回転力に効率的に寄与させることができ、電動モータを高トルク化できる。
ステータの軸方向一端よりも永久磁石の軸方向一端を軸方向外側に突出させることにより、ロータの有効磁束量を増大できる。このため、ステータに形成された鎖交磁束を、ロータの回転力に効率的に寄与させることができ、電動モータを高トルク化できる。
ところで上述の従来技術では、ロータコアの軸方向一端よりも軸方向外側に突出した永久磁石の軸方向一端部のうちの径方向外側面の磁束は、ロータの回転力に寄与する。これに対し、永久磁石の軸方向一端部のうちの径方向内側面には、ロータコアが存在していない。このため、永久磁石の軸方向一端部のうちの径方向内側面の磁束は、単なる漏れ磁束となってしまう。結果的に、永久磁石の有効磁束が減少してしまい、電動モータを効率よく高トルク化しにくいという課題があった。
永久磁石の径方向内側面の全体に渡ってロータコアが存在するように構成することも考えられるが、鉄損が生じてしまう。また、永久磁石の軸方向一端部がロータコアを介して漏出することになり、有効な解決手段とはいいにくい。
そこで、本発明は、永久磁石の磁束を最大限有効活用でき、効率よく高トルク化を図ることができる電動モータを提供する。
上記の課題を解決するために、本発明の第1態様では、電動モータは、環状のステータコア本体、及び前記ステータコア本体の内周面から径方向内側に向かって突出する複数のティースからなるステータコアを有するステータと、前記ティースに巻回されるコイルと、前記ステータコアの径方向内側で回転するシャフトと、前記シャフトに固定され、前記シャフトの回転軸線を径方向中心とするロータコア本体を有するロータコアと、前記ロータコア本体の外周面に配置された主磁石と、前記ロータコア本体の前記回転軸線方向の両端面のうちの少なくとも一方の端面に配置され、副磁石本体を有する副磁石と、を備え、前記主磁石は、前記ロータコア本体の少なくとも一方の前記端面よりも前記回転軸線方向の外側に突出したオーバーハング部を有し、前記副磁石本体は、前記オーバーハング部の径方向内側に配置されている。
このように構成することで、副磁石本体によって、オーバーハング部の径方向内側面から流れる磁束を保持できる。このため、主磁石の磁束を最大限有効活用でき、電動モータを効率よく高トルク化できる。
本発明の第2態様では、第1態様の電動モータにおいて、前記副磁石本体は着磁の配向が前記オーバーハング部と対向する外周面に磁極を発生させる極配向である。
このように構成することで、オーバーハング部の1つの磁極から径方向内側面を介して流れる磁束を、副磁石本体を介してオーバーハング部の隣の磁極へと流すことができる。このため、主磁石の漏れ磁束の発生を確実に防止でき、主磁石の磁束を最大限有効活用できる。
本発明の第3態様では、第1態様又は第2態様の電動モータにおいて、前記ロータコアは、前記ロータコア本体の外周面から径方向外側に向かって突出形成された複数のロータ突極を有し、前記主磁石は、周方向で隣り合う前記ロータ突極の間のそれぞれに配置されている。
このように構成することで、リラクタンストルクを利用できるので、電動モータをさらに効率よく高トルク化できる。
ところで、ロータ突極を有する分、このロータ突極に流れる磁束の影響でステータに鉄損が生じてしまう。このような構成で、ステータにおける軸方向の長さよりも例えばロータコアにおける軸方向の長さを長くしてしまうと、ステータへの鉄損の影響が大きくなってしまう。このため、ステータにおける軸方向の長さに対してロータコアにおける軸方向の長さを長くすることなく、主磁石にオーバーハング部を設けた。これにより、ロータコアによるステータへの鉄損の影響も小さくできる。
ところで、ロータ突極を有する分、このロータ突極に流れる磁束の影響でステータに鉄損が生じてしまう。このような構成で、ステータにおける軸方向の長さよりも例えばロータコアにおける軸方向の長さを長くしてしまうと、ステータへの鉄損の影響が大きくなってしまう。このため、ステータにおける軸方向の長さに対してロータコアにおける軸方向の長さを長くすることなく、主磁石にオーバーハング部を設けた。これにより、ロータコアによるステータへの鉄損の影響も小さくできる。
本発明の第4態様では、第3態様の電動モータにおいて、前記副磁石は、前記副磁石本体の外周面から径方向外側に向かって突出形成された複数の磁石突極を有し、前記複数の磁石突極は、それぞれ前記複数のロータ突極における前記回転軸線方向の端面に配置されている。
このように構成することで、磁石突極を利用して副磁石の位置決めを容易に行うことができる。磁石突極を有する分、副磁石の体積が増大されるので、副磁石の有効磁束を増大させることができる。
また、1つの主磁石の周方向両側面から流れる磁束を、副磁石を介して隣の主磁石に流すことができる。このため、ロータ突極を有するロータコアにおいて、主磁石の漏れ磁束の発生を確実に防止でき、主磁石の磁束を最大限有効活用できる。
また、1つの主磁石の周方向両側面から流れる磁束を、副磁石を介して隣の主磁石に流すことができる。このため、ロータ突極を有するロータコアにおいて、主磁石の漏れ磁束の発生を確実に防止でき、主磁石の磁束を最大限有効活用できる。
本発明の第5態様では、第4態様の電動モータにおいて、前記主磁石は、周方向両側面の径方向内側を含む少なくとも一部に形成された主磁石側面を有し、前記主磁石側面は、前記磁石突極の周方向側面に沿うように延在され、かつ周方向で前記磁石突極の前記周方向側面と対向しており、前記磁石突極の径方向外側の端面は、前記主磁石側面の径方向外側端と前記ロータ突極の径方向外側端との間に位置している。
このように構成することで、副磁石の体積を無駄に大きくすることなく、1つの主磁石の周方向両側面から流れる磁束を、副磁石を介して隣の主磁石に確実に流すことができる。このため、電動モータの製造コストをできる限り抑制できる。
本発明の第6態様では、第1態様から第5態様のいずれか1項の電動モータにおいて、前記主磁石の前記回転軸線方向の端面と、前記副磁石の前記回転軸線方向の外側端面とは、同一平面上に位置している。
このように構成することで、主磁石の磁束をより確実に最大限有効活用できる。すなわち、例えば主磁石の回転軸線方向両端よりも副磁石の回転軸線方向両端が回転軸線方向の外側に突出されている場合、副磁石の突出した箇所から漏れ磁束が発生してしまう。一方、例えば副磁石の回転軸線方向両端よりも主磁石の回転軸線方向両端が回転軸線方向の外側に突出されている場合、副磁石による主磁石の漏れ磁束の抑制効果が低下してしまう。
本発明の第7態様では、第1態様から第6態様のいずれか1項の電動モータにおいて、前記ステータコア及び前記ロータコアは、前記回転軸線方向に複数の電磁鋼板を積層してなる。
このように構成することで、ステータコア、ティース、及びロータコアに生じる渦電流損を低減でき、鉄損を低減できる。このため、電動モータを効率よく高トルク化できる。
本発明によれば、永久磁石の磁束を最大限有効活用でき、効率よく高トルク化を図ることが可能な電動モータを提供できる。
次に、本発明の実施形態を図面に基づいて説明する。
<減速機付きモータ>
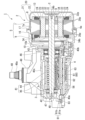
図1は、減速機付きモータ1の斜視図である。図2は、図1のII-II線に沿う断面図である。
減速機付きモータ1は、例えば、車両のワイパー装置の駆動源として用いられる。
図1、図2に示すように、減速機付きモータ1は、電動モータ2と、電動モータ2の回転を減速して出力する減速部3と、電動モータ2の駆動制御を行うコントローラ部4と、を備える。
図1は、減速機付きモータ1の斜視図である。図2は、図1のII-II線に沿う断面図である。
減速機付きモータ1は、例えば、車両のワイパー装置の駆動源として用いられる。
図1、図2に示すように、減速機付きモータ1は、電動モータ2と、電動モータ2の回転を減速して出力する減速部3と、電動モータ2の駆動制御を行うコントローラ部4と、を備える。
以下の説明において、単に「軸方向」という場合は、電動モータ2のシャフト31における中心軸(電動モータ2の回転軸線C)と平行な方向を意味するものとする。単に「周方向」という場合は、シャフト31の周方向(回転方向)を意味するものとする。単に「径方向」という場合は、軸方向及び周方向に直交するシャフト31の径方向を意味するものとする。
<電動モータ>
電動モータ2は、モータケース5と、モータケース5内に収納されている円筒状のステータ8と、ステータ8の径方向内側に設けられ、ステータ8に対して回転自在に設けられたロータ9と、を備える。電動モータ2は、ステータ8に電力を供給する際にブラシを必要としない、いわゆるブラシレスモータである。
電動モータ2は、モータケース5と、モータケース5内に収納されている円筒状のステータ8と、ステータ8の径方向内側に設けられ、ステータ8に対して回転自在に設けられたロータ9と、を備える。電動モータ2は、ステータ8に電力を供給する際にブラシを必要としない、いわゆるブラシレスモータである。
<モータケース>
モータケース5は、例えばアルミダイキャスト等の放熱性の優れた材料に形成されている。モータケース5は、軸方向に分割可能に構成された第1モータケース6と、第2モータケース7と、からなる。第1モータケース6及び第2モータケース7は、それぞれ有底筒状に形成されている。
第1モータケース6は、底部10が減速部3のギアケース40と接合されるように、このギアケース40と一体成形されている。底部10の径方向中央には、ロータ9のシャフト31が挿通される貫通孔10aが形成されている。
モータケース5は、例えばアルミダイキャスト等の放熱性の優れた材料に形成されている。モータケース5は、軸方向に分割可能に構成された第1モータケース6と、第2モータケース7と、からなる。第1モータケース6及び第2モータケース7は、それぞれ有底筒状に形成されている。
第1モータケース6は、底部10が減速部3のギアケース40と接合されるように、このギアケース40と一体成形されている。底部10の径方向中央には、ロータ9のシャフト31が挿通される貫通孔10aが形成されている。
第1モータケース6の開口部6aに、径方向外側に向かって張り出す外フランジ部16が形成されているとともに、第2モータケース7の開口部7aに、径方向外側に向かって張り出す外フランジ部17が形成されている。これら外フランジ部16,17同士を突き合わせて内部空間を有するモータケース5を形成している。モータケース5の内部空間に、第1モータケース6及び第2モータケース7に嵌合されるようにステータ8が配置される。
<ステータ>
図3は、ステータ8及びロータ9の構成を示し、軸方向からみた図に相当する。
図2、図3に示すように、ステータ8は、径方向に沿う断面形状が円形となる筒状のステータコア本体21と、ステータコア本体21から径方向内側に向かって突出する複数(例えば、本実施形態では6つ)のティース22と、が一体成形されたステータコア20を有している。ステータコア20は、複数の電磁鋼板20pを軸方向に積層することにより形成されている。ステータコア20は、複数の電磁鋼板20pを軸方向に積層して形成する場合に限られるものではなく、例えば、軟磁性粉を加圧成形することにより形成してもよい。
図3は、ステータ8及びロータ9の構成を示し、軸方向からみた図に相当する。
図2、図3に示すように、ステータ8は、径方向に沿う断面形状が円形となる筒状のステータコア本体21と、ステータコア本体21から径方向内側に向かって突出する複数(例えば、本実施形態では6つ)のティース22と、が一体成形されたステータコア20を有している。ステータコア20は、複数の電磁鋼板20pを軸方向に積層することにより形成されている。ステータコア20は、複数の電磁鋼板20pを軸方向に積層して形成する場合に限られるものではなく、例えば、軟磁性粉を加圧成形することにより形成してもよい。
ティース22は、ステータコア本体21の内周面から径方向に沿って突出するティース本体101と、ティース本体101の径方向内側端から周方向に沿って延びる鍔部102と、が一体成形されたものである。鍔部102は、ティース本体101から周方向両側に延びるように形成されている。周方向で隣り合う鍔部102の間に、スロット19が形成される。
ステータコア本体21の内周面及びティース22は、絶縁性を有する樹脂製のインシュレータ23によって覆われている。このインシュレータ23の上から各ティース22にコイル24が巻回されている。各コイル24は、コントローラ部4からの給電により、ロータ9を回転させるための鎖交磁束を生成する。
[第1実施形態]
<ロータ>
図4は、第1実施形態のロータ9を軸方向からみた平面図である。図5は、第1実施形態のロータコア32、主磁石33、及び副磁石34における軸方向の断面図である。図6は、第1実施形態におけるロータ9の分解斜視図である。
図2、図4から図6に示すように、ロータ9は、ステータ8の径方向内側に微小隙間を介して回転自在に設けられている。
<ロータ>
図4は、第1実施形態のロータ9を軸方向からみた平面図である。図5は、第1実施形態のロータコア32、主磁石33、及び副磁石34における軸方向の断面図である。図6は、第1実施形態におけるロータ9の分解斜視図である。
図2、図4から図6に示すように、ロータ9は、ステータ8の径方向内側に微小隙間を介して回転自在に設けられている。
ロータ9は、減速部3を構成するウォーム軸44と一体成形されたシャフト31と、シャフト31に嵌合固定されたロータコア32と、ロータコア32の外周面32aに設けられた4つの主磁石33と、ロータコア32における軸方向の両端面(ロータコア本体37における軸方向の両端面)32b,32cに設けられた2つの副磁石(副磁石本体)34と、を備える。このように、電動モータ2において、主磁石33の磁極数とスロット19(ティース22)の数との比は、2:3である。
ロータコア32は、複数の電磁鋼板32pを軸方向に積層することにより形成されている。ロータコア32は、複数の電磁鋼板32pを軸方向に積層して形成する場合に限られるものではなく、例えば、軟磁性粉を加圧成形することにより形成してもよい。
ロータコア32は、シャフト31の軸心(回転軸線C)を径方向中心とする円柱状のロータコア本体37と、ロータコア本体37の外周面37aから径方向外側に向かって突出形成された4つのロータ突極35と、が一体成形されたものである。ロータコア本体37の外周面37aが、ロータコア32の外周面32aである。
ロータコア32は、シャフト31の軸心(回転軸線C)を径方向中心とする円柱状のロータコア本体37と、ロータコア本体37の外周面37aから径方向外側に向かって突出形成された4つのロータ突極35と、が一体成形されたものである。ロータコア本体37の外周面37aが、ロータコア32の外周面32aである。
ロータコア本体37の径方向中央には、軸方向に貫通するシャフト挿通孔37bが形成されている。シャフト挿通孔37bに、シャフト31が圧入されている。シャフト挿通孔37bに対してシャフト31を挿入とし、接着剤等を用いてシャフト31にロータコア32を固定してもよい。シャフト挿通孔37bには、径方向外側に向かって延びる4つの逃げ溝37cが形成されている。
各逃げ溝37cは、ロータコア本体37の軸方向全体に渡って形成されており、シャフト挿通孔37bに連通されている。各逃げ溝37cは、周方向に等間隔で配置されている。各逃げ溝37cは、例えばシャフト挿通孔37bへのシャフト31の圧入強度を調整する役割を有する。
各逃げ溝37cは、ロータコア本体37の軸方向全体に渡って形成されており、シャフト挿通孔37bに連通されている。各逃げ溝37cは、周方向に等間隔で配置されている。各逃げ溝37cは、例えばシャフト挿通孔37bへのシャフト31の圧入強度を調整する役割を有する。
4つのロータ突極35は、周方向に等間隔で配置されている。各ロータ突極35は、径方向で各逃げ溝37cと同一直線上に配置されている。ロータ突極35は、ロータコア32の軸方向全体に延びるように形成されている。ロータ突極35は、周方向で対向する両側面35aが平行となるように形成されている。つまり、ロータ突極35は、周方向の幅寸法が径方向で均一になるように形成されている。
ロータ突極35における径方向の外側端部35bには、周方向中央に、1つの溝部91が軸方向全体に渡って形成されている。溝部91は、径方向内側に向かうに従って周方向の溝幅が徐々に狭くなるように、V溝状に形成されている。この溝部91の周方向両側の角部には、丸面取り部35cが形成されている。丸面取り部35cの径方向最外側端部が、ロータ突極35における径方向の外側端部35bとなる。
このように形成されたロータコア32の外周面32a(外周面37a)で、かつ周方向で隣り合う2つのロータ突極35の間は、それぞれ磁石収納部36として構成される。これら磁石収納部36にそれぞれ主磁石33が配置され、例えば接着剤等によりロータコア32に固定される。
主磁石33は、瓦状に形成されている。より具体的には、主磁石33において、径方向外側の外周面33aの円弧中心Coの位置、及び径方向内側の内周面33bの円弧中心Ciの位置は一致している。これら円弧中心Co,Ciは、回転軸線Cよりも径方向で対応する主磁石33寄りにずれている。主磁石33の外周面33aのうち径方向最外側を通る円の直径と、ロータ突極35における径方向の外側端部35bを通る円の直径とは同一である。
主磁石33の内周面33bは、ロータコア本体37の外周面37a(ロータコア32の外周面32a)に当接されている。主磁石33における周方向の両側面は、径方向内側に位置する主磁石側面33cと、主磁石側面33cよりも径方向外側に位置する傾斜面33dと、を有する。主磁石側面33cは、ロータ突極35の側面35aに沿うように形成されている。換言すれば、主磁石側面33cとロータ突極35の側面35aとは、ほぼ平行である。主磁石側面33cと内周面33bとは、円弧面33eを介して滑らかに連結されている。
傾斜面33dは、主磁石側面33cとの接続部33fから径方向外側に向かうに従ってロータ突極35の側面35aから漸次周方向に離間するように斜めで、かつ平坦に形成されている。接続部33fは、ロータ突極35の径方向中央よりもやや外側よりに配置されている。1つの主磁石33において、周方向両側の傾斜面33dは、主磁石33の周方向中間部と回転軸線Cとを結ぶ直線Sと平行である。このため、2つの傾斜面33d同士も平行である。
主磁石33における軸方向の長さL1は、ロータコア32における軸方向の長さL2よりも長い。すなわち、主磁石33は、ロータコア32における軸方向の両端面32b,32cから軸方向の外側に突出した2つのオーバーハング部33g,33hを有する。各オーバーハング部33g,33hにおいて、対応するロータコア32における軸方向の両端面32b,32cからの突出長さL3,L4は、同一である。これら突出長さL3,L4は、以下の説明では、オーバーハング部33g,33hにおける軸方向の長さL3,L4という。
このような主磁石33は、着磁(磁界)の配向が径方向(厚み方向)に沿ってパラレル配向となるように着磁されている。そして、周方向に磁極が互い違いになるように、主磁石33が配置されている。このため、ロータコア32のロータ突極35は、周方向で隣り合う主磁石33の間、つまり、磁極の境界(極境界)に位置している。
主磁石33としては、例えば、フェライトボンド磁石が用いられる。しかしながら、これに限られるものではなく、主磁石33として、フェライトボンド磁石に代わってフェライト焼結磁石、ネオジムボンド磁石、ネオジム焼結磁石等を適用することも可能である。
主磁石33としては、例えば、フェライトボンド磁石が用いられる。しかしながら、これに限られるものではなく、主磁石33として、フェライトボンド磁石に代わってフェライト焼結磁石、ネオジムボンド磁石、ネオジム焼結磁石等を適用することも可能である。
副磁石34は、ロータコア32における軸方向の両端面32b,32cのうち、ロータコア本体37上に配置されている。副磁石34は、ロータコア本体37の形状に対応するように、円環状に形成されている。副磁石34の外径D1は、ロータコア本体37の外径D2とほぼ同一である。このため、副磁石34は、主磁石33のオーバーハング部33g,33hの径方向内側に配置される。副磁石34の外周面34aは、径方向でオーバーハング部33g,33hと対向している。副磁石34の外周面34aは、主磁石33(オーバーハング部33g,33h)の内周面33bに接触している。
副磁石34の内径D3は、ロータコア本体37のシャフト挿通孔37bの内径D4よりも若干大きい程度である。副磁石34における軸方向の長さ(厚さ)L5は、主磁石33のオーバーハング部33g,33hにおける軸方向の長さL3,L4と同一である。このため、主磁石33における軸方向の両端面33i,33jと、各副磁石34における軸方向の外側端面34bとは、同一平面上に位置する。副磁石34の外側端面34bとは、副磁石34における軸方向の両端面のうち、ロータコア32とは反対側の端面をいう。
このような副磁石34は、着磁(磁界)の配向が外周面34aに磁極を発生させる極配向である(図4における矢印J参照)。副磁石34の磁極数は、主磁石33の磁極数(主磁石33の個数)と同一である。すなわち、本実施形態では、主磁石33の磁極数は4極あるので、副磁石34の磁極数も4極である。副磁石34の各磁極の位置は、それぞれ主磁石33と径方向で対向する位置である。副磁石34の外周面34aにおける磁極は、主磁石33の外周面33aにおける磁極と同極である。換言すれば、副磁石34の外周面34aにおける磁極は、主磁石33の内周面33bにおける磁極と異極である。
副磁石34としては、例えば、フェライトボンド磁石が用いられる。しかしながら、これに限られるものではなく、副磁石34として、フェライトボンド磁石に代わってフェライト焼結磁石、ネオジムボンド磁石、ネオジム焼結磁石等を適用することも可能である。副磁石34の材質は、主磁石33の材質と異なっていてもよい。
<減速部>
図1、図2に戻り、減速部3は、モータケース5が取り付けられているギアケース40と、ギアケース40内に収納されるウォーム減速機構41と、を備える。ギアケース40は、例えばアルミダイキャスト等の放熱性の優れた材料により形成されている。ギアケース40は、一面に開口部40aを有する箱状に形成されている。ギアケース40は、ウォーム減速機構41を収容するギア収容部42を有する。ギアケース40の側壁40bには、第1モータケース6が一体成形されている箇所に、この第1モータケース6の貫通孔10aとギア収容部42とを連通する開口部43が形成されている。
図1、図2に戻り、減速部3は、モータケース5が取り付けられているギアケース40と、ギアケース40内に収納されるウォーム減速機構41と、を備える。ギアケース40は、例えばアルミダイキャスト等の放熱性の優れた材料により形成されている。ギアケース40は、一面に開口部40aを有する箱状に形成されている。ギアケース40は、ウォーム減速機構41を収容するギア収容部42を有する。ギアケース40の側壁40bには、第1モータケース6が一体成形されている箇所に、この第1モータケース6の貫通孔10aとギア収容部42とを連通する開口部43が形成されている。
ギアケース40の底壁40cには、円筒状の軸受ボス49が突設されている。軸受ボス49は、ウォーム減速機構41の出力軸48を回転自在に支持するためのものである。軸受ボス49には、内周面に図示しない滑り軸受が設けられている。軸受ボス49の先端内周縁には、図示しないOリングが装着されている。これにより、軸受ボス49を介して外部から内部に塵埃や水が侵入してしまうことが防止される。軸受ボス49の外周面には、複数のリブ52が設けられている。これにより、軸受ボス49の剛性が確保されている。
ギア収容部42に収容されたウォーム減速機構41は、ウォーム軸44と、ウォーム軸44に噛合されるウォームホイール45と、により構成されている。ウォーム軸44は、電動モータ2のシャフト31と同軸上に配置されている。ウォーム軸44は、両端がギアケース40に設けられた軸受46,47によって回転自在に支持されている。ウォーム軸44の電動モータ2側の端部は、軸受46を介してギアケース40の開口部43に至るまで突出している。この突出したウォーム軸44の端部と電動モータ2のシャフト31との端部が接合され、ウォーム軸44とシャフト31とが一体化されている。ウォーム軸44とシャフト31は、1つの母材からウォーム軸部分とシャフト部分とを成形することにより一体として形成してもよい。
ウォーム軸44に噛合されるウォームホイール45には、このウォームホイール45の径方向中央に出力軸48が設けられている。出力軸48は、ウォームホイール45の回転軸線方向と同軸上に配置されている。出力軸48は、ギアケース40の軸受ボス49を介してギアケース40の外部に突出している。出力軸48の突出した先端には、図示しない電装品と接続されるスプライン48aが形成されている。
ウォームホイール45の径方向中央には、出力軸48が突出されている側とは反対側に、図示しないセンサマグネットが設けられている。センサマグネットは、ウォームホイール45の回転位置を検出する回転位置検出部60の一方を構成している。回転位置検出部60の他方を構成する磁気検出素子61は、ウォームホイール45のセンサマグネット側(ギアケース40の開口部40a側)でウォームホイール45と対向配置されているコントローラ部4に設けられている。
<コントローラ部>
電動モータ2の駆動制御を行うコントローラ部4は、磁気検出素子61が実装されたコントローラ基板62と、ギアケース40の開口部40aを閉塞するように設けられたカバー63と、を有している。コントローラ基板62が、ウォームホイール45のセンサマグネット側(ギアケース40の開口部40a側)に対向配置されている。
電動モータ2の駆動制御を行うコントローラ部4は、磁気検出素子61が実装されたコントローラ基板62と、ギアケース40の開口部40aを閉塞するように設けられたカバー63と、を有している。コントローラ基板62が、ウォームホイール45のセンサマグネット側(ギアケース40の開口部40a側)に対向配置されている。
コントローラ基板62は、いわゆるエポキシ基板に複数の導電性のパターン(不図示)が形成されたものである。コントローラ基板62には、電動モータ2のステータコア20から引き出されたコイル24の端末部が接続されているとともに、カバー63に設けられたコネクタ11の端子(不図示)が電気的に接続されている。
コントローラ基板62には、磁気検出素子61の他に、コイル24に供給する電流を制御するFET(Field Effect Transistor:電界効果トランジスタ)等のスイッチング素子からなるパワーモジュール(不図示)が実装されている。コントローラ基板62には、このコントローラ基板62に印加される電圧の平滑化を行うコンデンサ(不図示)等が実装されている。
このように構成されたコントローラ基板62を覆うカバー63は、樹脂により形成されている。カバー63は、若干外側に膨出するように形成されている。カバー63の内面側は、コントローラ基板62等を収容するコントローラ収容部56とされている。
カバー63の外周部に、コネクタ11が一体成形されている。コネクタ11は、図示しない外部電源から延びるコネクタが嵌着される。コネクタ11の端子に、コントローラ基板62が電気的に接続されている。これにより、外部電源の電力がコントローラ基板62に供給される。
カバー63の外周部に、コネクタ11が一体成形されている。コネクタ11は、図示しない外部電源から延びるコネクタが嵌着される。コネクタ11の端子に、コントローラ基板62が電気的に接続されている。これにより、外部電源の電力がコントローラ基板62に供給される。
カバー63の開口縁には、ギアケース40の側壁40bの端部と嵌め合わされる嵌合部81が突出形成されている。嵌合部81は、カバー63の開口縁に沿う2つの壁81a,81bにより構成されている。これら2つの壁81a,81bの間に、ギアケース40の側壁40bの端部が挿入(嵌め合い)される。これにより、ギアケース40とカバー63との間にラビリンス部83が形成される。ラビリンス部83によって、ギアケース40とカバー63との間から塵埃や水が浸入してしまうことが防止される。ギアケース40とカバー63との固定は、図示しないボルトを締結することにより行われる。
<減速機付きモータの動作>
次に、減速機付きモータ1の動作について説明する。
減速機付きモータ1は、コネクタ11を介してコントローラ基板62に供給された電力が、図示しないパワーモジュールを介して電動モータ2の各コイル24に選択的に供給される。すると、ステータ8(ティース22)に所定の鎖交磁束が形成され、この鎖交磁束とロータ9の主磁石33により形成される有効磁束との間で磁気的な吸引力や反発力が生じる。これにより、ロータ9が継続的に回転する。
次に、減速機付きモータ1の動作について説明する。
減速機付きモータ1は、コネクタ11を介してコントローラ基板62に供給された電力が、図示しないパワーモジュールを介して電動モータ2の各コイル24に選択的に供給される。すると、ステータ8(ティース22)に所定の鎖交磁束が形成され、この鎖交磁束とロータ9の主磁石33により形成される有効磁束との間で磁気的な吸引力や反発力が生じる。これにより、ロータ9が継続的に回転する。
ロータ9が回転すると、シャフト31と一体化されているウォーム軸44が回転し、さらにウォーム軸44に噛合されているウォームホイール45が回転する。そして、ウォームホイール45に連結されている出力軸48が回転し、所望の電装品(例えば、車両に搭載されるワイパ駆動装置)が駆動する。
コントローラ基板62に実装されている磁気検出素子61によって検出されたウォームホイール45の回転位置検出結果は、信号として図示しない外部機器に出力される。図示しない外部機器は、ウォームホイール45の回転位置検出信号に基づいて、図示しないパワーモジュールのスイッチング素子等の切替えタイミングが制御され、電動モータ2の駆動制御が行われる。パワーモジュールの駆動信号の出力や電動モータ2の駆動制御は、コントローラ部4で行われていてもよい。
<ロータの作用>
次に、ロータ9の作用について説明する。
ロータ9は、ロータコア32の外周面32aに、主磁石33を配置した、いわゆるSPM(Surface Permanent Magnet)方式のロータである。このため、d軸方向のインダクタンス値が小さくなる。これに加え、ロータ9は、周方向で隣り合う主磁石33間にロータ突極35が設けられている。この結果、ステータ8の鎖交磁束によるq軸方向のインダクタンス値は、ロータ突極35が無い場合と比較して大きくなる。このように、d軸方向とq軸方向とのリラクタンストルクの差も利用してロータ9が回転される。
次に、ロータ9の作用について説明する。
ロータ9は、ロータコア32の外周面32aに、主磁石33を配置した、いわゆるSPM(Surface Permanent Magnet)方式のロータである。このため、d軸方向のインダクタンス値が小さくなる。これに加え、ロータ9は、周方向で隣り合う主磁石33間にロータ突極35が設けられている。この結果、ステータ8の鎖交磁束によるq軸方向のインダクタンス値は、ロータ突極35が無い場合と比較して大きくなる。このように、d軸方向とq軸方向とのリラクタンストルクの差も利用してロータ9が回転される。
主磁石33は、ロータコア32における軸方向の両端面32b,32cから軸方向の外側に突出した2つのオーバーハング部33g,33hを有する。このため、ロータ9の有効磁束量が増大される。
ここで、ロータコア32における軸方向の両端面32b,32cには、それぞれ副磁石34が設けられている。副磁石34は、オーバーハング部33g,33hの径方向内側に配置されている。このため、副磁石34によってオーバーハング部33g,33hの内周面33bから流れる磁束が保持される。
ここで、ロータコア32における軸方向の両端面32b,32cには、それぞれ副磁石34が設けられている。副磁石34は、オーバーハング部33g,33hの径方向内側に配置されている。このため、副磁石34によってオーバーハング部33g,33hの内周面33bから流れる磁束が保持される。
この際、副磁石34は、着磁(磁界)の配向が外周面34aに磁極を発生させる極配向である。このため、1つの主磁石33でのオーバーハング部33g,33hにおける内周面33bの磁束は、副磁石34を通り、N極からS極に向けて(図4における矢印J参照)流れる。そして、周方向で隣の主磁石33(オーバーハング部33g,33h)へと磁束が流れる。このため、主磁石33の漏れ磁束の発生が防止され、主磁石33の磁束が最大限有効活用される。
このように、上述の第1実施形態では、主磁石33は、ロータコア32における軸方向の両端面32b,32cから軸方向の外側に突出した2つのオーバーハング部33g,33hを有する。また、ロータコア32における軸方向の両端面32b,32cには、それぞれ副磁石34が設けられている。副磁石34は、オーバーハング部33g,33hの径方向内側に配置されている。このため、副磁石34によってオーバーハング部33g,33hの内周面33bから流れる磁束を保持できる。よって、主磁石33の磁束を最大限有効活用でき、電動モータ2を効率よく高トルク化できる。
副磁石34は、着磁(磁界)の配向が外周面34aに磁極を発生させる極配向である。このため、1つのオーバーハング部33g,33hから内周面33bを介して流れる磁束を、副磁石34を介して周方向で隣のオーバーハング部33g,33hへとスムーズに流すことができる。このため、主磁石33の漏れ磁束の発生を確実に防止でき、主磁石33の磁束を最大限有効活用できる。
なお、例えば図4、図5に2点鎖線で示す着磁(磁界)の配向J’のように、副磁石34における着磁(磁界)の配向をラジアル配向とした場合、副磁石34によって主磁石33の磁束をある程度保持できるものの、副磁石34の内周面側で漏れ磁束が発生してしまう。このため、副磁石34における着磁(磁界)の配向を極配向とすることにより、主磁石33の漏れ磁束の発生をより確実に防止でき、主磁石33の磁束をさらに最大限有効活用できる。
ロータコア32は、ロータコア本体37の外周面37aから径方向外側に向かって突出形成された4つのロータ突極35を有している。このため、リラクタンストルクを利用できるので、電動モータ2をさらに効率よく高トルク化できる。
ところで、ロータ突極35を有する分、このロータ突極35に流れる磁束の影響でステータコア20に鉄損が生じてしまう。このような構成で、ステータコア20における軸方向の長さよりも例えばロータコア32における軸方向の長さL2を長くしてしまうと、ステータコア20への鉄損の影響が大きくなってしまう。このため、ステータコア20における軸方向の長さに対してロータコア32における軸方向の長さL2を長くすることなく、主磁石33にオーバーハング部33g,33hを設けた。これにより、ロータコア32によるステータコア20への鉄損の影響も小さくできる。
主磁石33における軸方向の両端面33i,33jと、各副磁石34における軸方向の外側端面34bとは、同一平面上に位置している。このため、主磁石33の磁束をより確実に最大限有効活用できる。すなわち、例えば主磁石33における軸方向の両端面33i,33jよりも各副磁石34における軸方向の外側端面34bが軸方向外側に突出されている場合、副磁石34の突出した箇所から漏れ磁束が発生してしまう。一方、例えば各副磁石34における軸方向の外側端面34bよりも主磁石33における軸方向の両端面33i,33jが軸方向外側に突出されている場合、副磁石34による主磁石33の漏れ磁束の抑制効果が低下してしまう。
ステータ8のステータコア20は、複数の電磁鋼板20pを軸方向に積層することにより形成されている。ロータ9のロータコア32は、複数の電磁鋼板32pを軸方向に積層することにより形成されている。このため、ステータコア20やロータコア32に生じる渦電流損を低減でき、鉄損を低減できる。よって、電動モータ2を効率よく高トルク化できる。
主磁石33は、着磁(磁界)の配向が径方向(厚み方向)に沿ってパラレル配向となるように着磁されている。このため、主磁石33における着磁(磁界)の配向がラジアル配向である場合と比較して、電動モータ2のコギングを抑制するとともに、ロータ9の有効磁束を高めることができる。
また、主磁石33の外周面33aの円弧中心Coの位置が回転軸線Cよりも径方向で対応する主磁石33寄りにずれている。このため、主磁石33とステータコア20(ティース22)との間の距離は、主磁石33の周方向中から周方向両側面に向かうに従って漸次長くなる。これにより、ステータ8に対してロータ9の磁極の切り替わりが滑らかになり、さらに電動モータ2のコギングを抑制できる。
電動モータ2を効率よく高トルク化できるので、国連が主導する持続可能な開発目標(SDGs)の目標7「全ての人々の、安価かつ信頼できる持続可能な近代的エネルギーへのアクセスを確保する」、及び目標9「強靭(レジリエント)なインフラ構築、包摂的かつ持続可能な産業化の促進及びイノベーションの促進を図る」に貢献することが可能となる。
上述の第1実施形態では、ロータコア32は、ロータコア本体37の外周面37aから径方向外側に向かって突出形成された4つのロータ突極35を有している場合について説明した。主磁石33は、周方向で隣り合うロータ突極35の間のそれぞれに配置されるように、4つ設けられている場合について説明した。しかしながらこれに限られるものではなく、ロータコア32は、ロータ突極35を有さなくてもよい。この場合、主磁石33を円筒状のいわゆるリングマグネットとしてもよい。
[第2実施形態]
次に、図2、図5、図6を援用し、図7、図8に基づいて、本発明の第2実施形態について説明する。第1実施形態と同一態様には、同一符号を付して説明を省略する。
図7は、第2実施形態のロータ209を軸方向からみた平面図である。図7は、前述の図4に対応している。図8は、図7のVIII部拡大図である。
図2、図7、図8に示すように、第2実施形態において、減速機付きモータ1は、電動モータ202と、電動モータ202の回転を減速して出力する減速部3と、電動モータ202の駆動制御を行うコントローラ部4と、を備える点等の基本的構成は、前述の第1実施形態と同様である。
次に、図2、図5、図6を援用し、図7、図8に基づいて、本発明の第2実施形態について説明する。第1実施形態と同一態様には、同一符号を付して説明を省略する。
図7は、第2実施形態のロータ209を軸方向からみた平面図である。図7は、前述の図4に対応している。図8は、図7のVIII部拡大図である。
図2、図7、図8に示すように、第2実施形態において、減速機付きモータ1は、電動モータ202と、電動モータ202の回転を減速して出力する減速部3と、電動モータ202の駆動制御を行うコントローラ部4と、を備える点等の基本的構成は、前述の第1実施形態と同様である。
図7、図8に示すように、第1実施形態と第2実施形態との相違点は、第1実施形態のロータ9における副磁石34の形状と、第2実施形態のロータ209における副磁石234の形状と、が異なる点にある。
より具体的には、副磁石234は、円環状の副磁石本体71と、副磁石本体71の外周面71aから径方向外側に向かって突出形成された4つの磁石突極72と、が一体成形されたものである。
より具体的には、副磁石234は、円環状の副磁石本体71と、副磁石本体71の外周面71aから径方向外側に向かって突出形成された4つの磁石突極72と、が一体成形されたものである。
副磁石本体71は、ロータコア32における軸方向の両端面32b,32cのうち、ロータコア本体37上(図5参照)に配置されている。副磁石本体71の形状は、第1実施形態における副磁石34の形状と同一である。すなわち、副磁石本体71は、ロータコア本体37の形状に対応するように、円環状に形成されている。副磁石本体71の外径D21は、ロータコア本体37の外径D2(図6参照)とほぼ同一である。このため、副磁石本体71は、主磁石33のオーバーハング部33g,33hの径方向内側に配置される。副磁石本体71の外周面71aは、径方向でオーバーハング部33g,33hと対向している。副磁石34の外周面34aは、主磁石33(オーバーハング部33g,33h)の内周面33bに接触している。
4つの磁石突極72は、周方向に等間隔で配置されている。各磁石突極72は、ロータコア32における軸方向の両端面32b,32cのうち、ロータ突極35上に配置されている。磁石突極72は、周方向で対向する両側面72aが平行となるように形成されている。つまり、磁石突極72は、周方向の幅寸法が径方向で均一になるように形成されている。磁石突極72の周方向の幅寸法は、ロータ突極35の周方向の幅寸法と同一である。したがって、磁石突極72の両側面72aは、主磁石33の主磁石側面33cに接触している。
磁石突極72における径方向の外側端面72bは、おおよそ周方向に沿うように平坦に形成されている。磁石突極72における外側端面72bの位置は、主磁石33における接続部33f(主磁石側面33cの径方向外側端)とロータ突極35の外側端部35bとの間に位置している。
このような副磁石234における着磁(磁界)の配向も、第1実施形態の副磁石34と同様に極配向である(図7における矢印J参照)。
このような副磁石234における着磁(磁界)の配向も、第1実施形態の副磁石34と同様に極配向である(図7における矢印J参照)。
したがって、上述の第2実施形態によれば、前述の第1実施形態と同様の効果を奏する。これに加え、副磁石234は、磁石突極72を有している。このため、磁石突極72を利用して副磁石234の位置決めを容易に行うことができる。磁石突極72を有する分、副磁石234の体積が増大されるので、副磁石234の有効磁束を増大させることができる。
また、1つのオーバーハング部33g,33hから内周面33bを介して流れる磁束を、副磁石234を介して周方向で隣のオーバーハング部33g,33hへとスムーズに流すことができる。とりわけ、主磁石33における着磁(磁界)の配向がパラレル配向となるように着磁されている場合、1つの主磁石33の主磁石側面33cから流れる磁束を、磁石突極72を介して周方向で隣のオーバーハング部33g,33hへとスムーズに流すことができる(図7における矢印J参照)。このため、主磁石33の漏れ磁束の発生を確実に防止でき、主磁石33の磁束をさらに最大限有効活用できる。
なお、主磁石33における着磁(磁界)の配向をラジアル配向とした場合、主磁石33の周方向両側での配向は、磁石突極72の側面72aとほぼ平行になる。このため、主磁石33の周方向両側からの磁石突極72への磁束の流れは発生しにくい。
ここで、磁石突極72とオーバーハング部33g,33hとが接触する箇所は、主磁石33における接続部33fよりも径方向内側である。すなわち、磁石突極72は、接続部33fよりも径方向内側が主磁石33における漏れ磁束の発生の防止に寄与することになる。本第2実施形態では、磁石突極72における外側端面72bの位置は、主磁石33における接続部33fとロータ突極35の外側端部35bとの間に位置している。このため、副磁石234の体積を無駄に大きくすることなく、1つの主磁石33の周方向両側面から流れる磁束を、副磁石234を介して隣の主磁石33に確実に流すことができる。よって、電動モータ202の製造コストをできる限り抑制できる。
本発明は上述の実施形態に限られるものではなく、本発明の趣旨を逸脱しない範囲において、上述の実施形態に種々の変更を加えたものを含む。
例えば、上述の実施形態では、減速機付きモータ1は、車両のワイパー装置の駆動源として用いられる場合について説明した。しかしながらこれに限られるものではなく、減速機付きモータ1は、ワイパー装置以外にも、車両に搭載される電装品(例えば、パワーウインドウ、サンルーフ、電動シート等)の駆動源となるものや、その他のさまざまな用途に使用することができる。
例えば、上述の実施形態では、減速機付きモータ1は、車両のワイパー装置の駆動源として用いられる場合について説明した。しかしながらこれに限られるものではなく、減速機付きモータ1は、ワイパー装置以外にも、車両に搭載される電装品(例えば、パワーウインドウ、サンルーフ、電動シート等)の駆動源となるものや、その他のさまざまな用途に使用することができる。
上述の実施形態では、副磁石34,234は、主磁石33のオーバーハング部33g,33hに接触しているとして説明した。しかしながらこれに限られるものではなく、完全に接触していなくてもよい。主磁石33や副磁石34,234の製造誤差により、主磁石33と副磁石34,234との間に微小隙間が形成された場合でも、上述の実施形態と同様の効果を奏する。このことは、ロータ突極35と主磁石33とが完全に接触していない場合も同様である。
上述の実施形態では、主磁石33は、ロータコア32における軸方向の両端面32b,32cから軸方向の外側に突出した2つのオーバーハング部33g,33hを有する場合について説明した。ロータコア32における軸方向の両端面(ロータコア本体37における軸方向の両端面)32b,32cに、それぞれ副磁石34,234が設けられた場合について説明した。しかしながらこれに限られるものではなく、主磁石33は、ロータコア32における軸方向の両端面32b,32cのうち、少なくともいずれか一方から軸方向の外側に突出したオーバーハング部を有していればよい。この場合、副磁石34,234は、オーバーハング部が存在する箇所にのみ設けられていればよい。
上述の実施形態では、各オーバーハング部33g,33hの突出長さL3,L4は同一である場合について説明した。しかしながらこれに限られるものではなく、各オーバーハング部33g,33hの突出長さL3,L4は同一でなくてもよい。この場合、各オーバーハング部33g,33hの突出長さL3,L4に応じ、副磁石34における軸方向の長さ(厚さ)L5を変更することが望ましい。そして、主磁石33における軸方向の両端面33i,33jと、各副磁石34における軸方向の外側端面34bとを同一平面上に位置させることが望ましい。
上述の実施形態では、主磁石33における周方向の両側面は、径方向内側に位置する主磁石側面33cと、主磁石側面33cよりも径方向外側に位置する傾斜面33dと、を有する場合について説明した。主磁石側面33cと傾斜面33dとの接続部33fは、ロータ突極35の径方向中央よりもやや外側よりに配置されている場合について説明した。しかしながらこれに限られるものではなく、主磁石33における接続部33fの位置は、任意に設定することができる。また、主磁石33における周方向の両側面全体を、主磁石側面33cとすることも可能である。
上述の実施形態では、ロータコア32は、4つのロータ突極35を有する場合について説明した。ロータ9は4つの主磁石33を有し、磁極数が4極である場合について説明した。ステータコア20は、6つのティース22を有する場合について説明した。しかしながらこれに限られるものではなく、ロータ突極35、主磁石33の数、及びティース22の数は任意に設定可能である。副磁石34の磁極数は、ロータ9における主磁石33による磁極数に対応するように変更すればよい。
1…減速機付きモータ、2…電動モータ、3…減速部、4…コントローラ部、5…モータケース、6…第1モータケース、6a…開口部、7…第2モータケース、7a…開口部、8…ステータ、9…ロータ、10…底部、10a…貫通孔、11…コネクタ、16…外フランジ部、17…外フランジ部、19…スロット、20…ステータコア、20p…電磁鋼板、21…ステータコア本体、22…ティース、23…インシュレータ、24…コイル、31…シャフト、32…ロータコア、32a…外周面、32b…端面、32c…端面、32p…電磁鋼板、33…主磁石、33a…外周面、33b…内周面、33c…主磁石側面、33d…傾斜面、33e…円弧面、33f…接続部、33g…オーバーハング部、33h…オーバーハング部、33i…端面、33j…端面、34…副磁石、34a…外周面、34b…外側端面、35…ロータ突極、35a…側面、35b…外側端部、35c…丸面取り部、36…磁石収納部、37…ロータコア本体、37a…外周面、37b…シャフト挿通孔、37c…溝、40…ギアケース、40a…開口部、40b…側壁、40c…底壁、41…ウォーム減速機構、42…ギア収容部、43…開口部、44…ウォーム軸、45…ウォームホイール、46…軸受、47…軸受、48…出力軸、48a…スプライン、49…軸受ボス、52…リブ、56…コントローラ収容部、60…回転位置検出部、61…磁気検出素子、62…コントローラ基板、63…カバー、71…副磁石本体、71a…外周面、72…磁石突極、72a…側面、72b…外側端面、81…嵌合部、81a…壁、81b…壁、83…ラビリンス部、91…溝部、101…ティース本体、102…鍔部、202…電動モータ、209…ロータ、234…副磁石
Claims (7)
- 環状のステータコア本体、及び前記ステータコア本体の内周面から径方向内側に向かって突出する複数のティースからなるステータコアを有するステータと、
前記ティースに巻回されるコイルと、
前記ステータコアの径方向内側で回転するシャフトと、
前記シャフトに固定され、前記シャフトの回転軸線を径方向中心とするロータコア本体を有するロータコアと、
前記ロータコア本体の外周面に配置された主磁石と、
前記ロータコア本体の前記回転軸線方向の両端面のうちの少なくとも一方の端面に配置され、副磁石本体を有する副磁石と、
を備え、
前記主磁石は、前記ロータコア本体の少なくとも一方の前記端面よりも前記回転軸線方向の外側に突出したオーバーハング部を有し、
前記副磁石本体は、前記オーバーハング部の径方向内側に配置されている
ことを特徴とする電動モータ。 - 前記副磁石本体は、着磁の配向が前記オーバーハング部と対向する外周面に磁極を発生させる極配向である
ことを特徴とする請求項1に記載の電動モータ。 - 前記ロータコアは、前記ロータコア本体の外周面から径方向外側に向かって突出形成された複数のロータ突極を有し、
前記主磁石は、周方向で隣り合う前記ロータ突極の間のそれぞれに配置されている
ことを特徴とする請求項1又は請求項2に記載の電動モータ。 - 前記副磁石は、前記副磁石本体の外周面から径方向外側に向かって突出形成された複数の磁石突極を有し、
前記複数の磁石突極は、それぞれ前記複数のロータ突極における前記回転軸線方向の端面に配置されている
ことを特徴とする請求項3に記載の電動モータ。 - 前記主磁石は、周方向両側面の径方向内側を含む少なくとも一部に形成された主磁石側面を有し、
前記主磁石側面は、前記磁石突極の周方向側面に沿うように延在され、かつ周方向で前記磁石突極の前記周方向側面と対向しており、
前記磁石突極の径方向外側の端面は、前記主磁石側面の径方向外側端と前記ロータ突極の径方向外側端との間に位置している
ことを特徴とする請求項4に記載の電動モータ。 - 前記主磁石の前記回転軸線方向の端面と、前記副磁石の前記回転軸線方向の外側端面とは、同一平面上に位置している
ことを特徴とする請求項1又は請求項2に記載の電動モータ。 - 前記ステータコア及び前記ロータコアは、前記回転軸線方向に複数の電磁鋼板を積層してなる
ことを特徴とする請求項1又は請求項2に記載の電動モータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022071637A JP2023161321A (ja) | 2022-04-25 | 2022-04-25 | 電動モータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022071637A JP2023161321A (ja) | 2022-04-25 | 2022-04-25 | 電動モータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2023161321A true JP2023161321A (ja) | 2023-11-07 |
Family
ID=88650143
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022071637A Pending JP2023161321A (ja) | 2022-04-25 | 2022-04-25 | 電動モータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2023161321A (ja) |
-
2022
- 2022-04-25 JP JP2022071637A patent/JP2023161321A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008131683A (ja) | アキシャルエアギャップ型電動機 | |
| US11289960B2 (en) | Motor and brushless wiper motor | |
| WO2018128165A1 (ja) | ロータおよび電動モータ | |
| US11901779B2 (en) | Motor and brushless wiper motor | |
| US20210384783A1 (en) | Rotor, motor and brushless motor | |
| CN111919359B (zh) | 马达以及无刷雨刮器马达 | |
| JP7077153B2 (ja) | モータ及びブラシレスワイパーモータ | |
| WO2019202915A1 (ja) | モータ、ブラシレスワイパーモータ、及びモータの駆動方法 | |
| JP2023161321A (ja) | 電動モータ | |
| JP2020078177A (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP7431076B2 (ja) | モータ | |
| JP2023161742A (ja) | 電動モータ | |
| JP6655500B2 (ja) | 電動モータ | |
| JP2023173172A (ja) | 電動モータ | |
| JP7122944B2 (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| JP7462533B2 (ja) | ロータ、モータ及びブラシレスワイパーモータ | |
| KR102220049B1 (ko) | 스테이터 코어 및 이를 포함하는 모터 | |
| JP7287825B2 (ja) | モータ、及びワイパモータ | |
| KR101405973B1 (ko) | 모터 | |
| JP2023049370A (ja) | 電動モータ | |
| KR20100005890A (ko) | 모터 | |
| JP2024067917A (ja) | 回転電機 | |
| JP2024064544A (ja) | 回転電機 | |
| JP2023060598A (ja) | ロータ、及び、モータ | |
| KR101448646B1 (ko) | 모터 |