WO2017209055A1 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- WO2017209055A1 WO2017209055A1 PCT/JP2017/019926 JP2017019926W WO2017209055A1 WO 2017209055 A1 WO2017209055 A1 WO 2017209055A1 JP 2017019926 W JP2017019926 W JP 2017019926W WO 2017209055 A1 WO2017209055 A1 WO 2017209055A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- steering
- joystick lever
- pilot
- valve
- input member
- Prior art date
Links
Images
























Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/12—Hand levers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D12/00—Steering specially adapted for vehicles operating in tandem or having pivotally connected frames
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/08—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by type of steering valve used
- B62D5/087—Sliding spool valves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/09—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by means for actuating valves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/20—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle specially adapted for particular type of steering gear or particular application
- B62D5/28—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle specially adapted for particular type of steering gear or particular application for pivoted bogies
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/09—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by means for actuating valves
- B62D5/091—Hydraulic steer-by-wire systems, e.g. the valve being actuated by an electric motor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/08—Superstructures; Supports for superstructures
- E02F9/0841—Articulated frame, i.e. having at least one pivot point between two travelling gear units
Definitions
- the present invention relates to an articulated work vehicle.
- a configuration is disclosed in which a steering angle is changed by controlling a flow rate of oil supplied to a hydraulic actuator disposed between a front frame and a rear frame (for example, Patent Documents). 1 and 2).
- a flow rate of oil supplied to a hydraulic actuator disposed between a front frame and a rear frame for example, Patent Documents. 1 and 2.
- Patent Documents 1 and 2 when the operator operates the joystick lever, the open / close state of the pilot valve port changes and the pilot pressure is changed.
- the flow rate supplied from the steering valve to the hydraulic actuator is adjusted according to the changed pilot pressure, and the steering angle of the work vehicle is changed.
- the joystick lever is arranged on the side of the driver's seat provided on the rear frame of the work vehicle. Further, the pilot valve is disposed below the driver's seat and in the vicinity immediately below the joystick lever in order to transmit the operation of the joystick lever with a simple configuration.
- a work vehicle according to a first invention is an articulated work vehicle in which a front frame and a rear frame are connected, and includes a hydraulic actuator, a control valve, a joystick lever, 1 link mechanism.
- the hydraulic actuator is driven by hydraulic pressure to change the steering angle of the front frame with respect to the rear frame.
- the control valve controls the flow rate of oil supplied to the hydraulic actuator.
- the joystick lever is disposed in a cab provided on the rear frame and is operated by an operator.
- the first link mechanism is disposed below the cab and transmits the operation of the joystick lever to the control valve.
- the first link mechanism is provided on the lower side of the cab. Therefore, the control valve is not limited to the vicinity immediately below the driver's seat but is located away from the driver's seat. And can be arranged at a position according to the structure of the work vehicle. For this reason, the freedom degree of the installation place of a valve can be raised.
- a work vehicle according to a second aspect of the present invention is the work vehicle according to the first aspect of the present invention, and the control valve is disposed on the front frame.
- the control valve can be disposed on the front frame even when the space under the driver's seat is small.
- a work vehicle according to a third invention is the work vehicle according to the first invention and further includes a steering valve.
- the steering valve adjusts the flow rate of oil supplied to the hydraulic actuator based on the pilot pressure input from the control valve.
- the control valve controls the flow rate of oil supplied from the steering valve to the hydraulic actuator by adjusting the pilot pressure.
- the pilot pressure is adjusted by the operation of the operator, the amount of oil supplied from the steering valve to the hydraulic actuator is controlled, and the steering angle of the front frame with respect to the rear frame is changed.
- a work vehicle is the work vehicle according to the first aspect of the present invention, and the control valve is disposed on the front frame.
- the control valve has a spool as a valve body, and controls the flow rate of oil by moving the spool along its axial direction.
- a spool valve can be used as a control valve to which the operation of the joystick lever is transmitted.
- a work vehicle is the work vehicle according to the first aspect of the present invention, further comprising a force applying unit.
- the force applying unit includes an electric motor as a drive source, and applies an assisting force or a reaction force to the operation of the joystick lever.
- the force required for operation of the joystick lever is mainly determined by the control valve, but by applying an assisting force or reaction force to the operation of the joystick lever by the force applying unit, it is adapted to the state of the work vehicle. The feeling of operation can be changed.
- the operator can easily operate by applying auxiliary force to the operation of the joystick lever.
- auxiliary force For example, when a spool valve is used as the control valve, it is assumed that the operation of the joystick lever is heavy because the first link mechanism is also interposed, but the operability is improved by applying an auxiliary force.
- the operability can be improved by applying an assisting force to the joystick lever to reduce the force required to operate the joystick lever.
- the traveling stability can be improved by applying a reaction force to the joystick lever and increasing the force required for operating the joystick lever.
- the operator's feeling of operation can be improved by appropriately changing the force required for operating the joystick lever in accordance with the traveling state of the work vehicle.
- a work vehicle according to a sixth aspect of the present invention is the work vehicle according to the fifth aspect of the present invention, further comprising a connecting portion.
- the connecting portion connects the joystick lever and the first link mechanism.
- the force applying unit further includes a transmission mechanism that transmits an auxiliary force or a reaction force to the connecting unit. Thereby, the force of the force applying portion can be transmitted to the connecting portion connecting the joystick lever and the control valve, and the force required for operating the joystick lever can be changed.
- a work vehicle is the work vehicle according to the fifth aspect of the present invention, further comprising a torque sensor and a control unit.
- the torque sensor detects torque generated by operating the joystick lever.
- the control unit controls the electric motor based on the detection value of the torque sensor.
- a force can be applied according to the torque applied to the joystick lever by the operator. For example, when the torque applied to the joystick lever by the operator is large, the assisting force applied by the force applying unit can be increased, and when the torque is small, the magnitude of the applying force can be controlled to decrease the assisting force.
- a work vehicle is the work vehicle according to the fifth aspect, wherein the first link mechanism includes an arm member, a rotating member, a first rod member, and a second rod member.
- the arm member is connected to the joystick lever and rotates together with the rotation operation of the joystick lever.
- the rotating member is rotatably arranged coaxially with the articulate center.
- the first rod member connects the arm member and the rotating member.
- the second rod member connects the rotating member and the control valve.
- a work vehicle is the work vehicle according to the first invention, and the control valve includes a first input member, a second input member, and an urging portion.
- the first input member is connected to the joystick lever via the first link mechanism and is displaced according to the operation amount of the joystick lever.
- the second input member is fixed to the front frame.
- the urging unit urges the first input member so as to be in a neutral position where the displacement amount of the first input member relative to the second input member is zero.
- the control valve is arranged at the center of the front frame or the articulate so that the first input member and the second input member are along the vertical direction.
- the control valve controls the flow rate of the oil supplied to the hydraulic actuator according to the difference of the displacement amount of the first input member with respect to the displacement amount of the second input member.
- the joystick lever is operated against the urging force of the urging unit.
- a control valve which is a so-called rotary valve, can be arranged at the center of the front frame or the articulate.
- the control valve is provided with the urging unit in this way, and the operator operates the joystick lever with an operation force that opposes the urging force by the urging unit. An assisting force or a reaction force can be applied to an operation that opposes the urging force.
- a work vehicle according to a tenth invention is the work vehicle according to the first invention and further includes a second link mechanism.
- the control valve includes a first input member, a second input member, and an urging portion.
- the first input member is connected to the joystick lever via the first link mechanism and is displaced according to the operation amount of the joystick lever.
- the second input member changes according to the steering angle.
- the urging unit urges the first input member so as to be in a neutral position where the displacement amount of the first input member relative to the second input member is zero.
- the second link mechanism connects the front frame and the second input member, and transmits a change in the steering angle to the second input member.
- the first input member and the second input member are arranged along the vertical direction at the center of the articulate, and the control valve is provided in the hydraulic actuator according to the amount of displacement of the first input member relative to the second input member. Controls the flow rate of supplied oil.
- the joystick lever is operated against the urging force of the urging unit.
- a side view of a wheel loader of an embodiment concerning the present invention Enlarged view of the vicinity of the cab and connecting shaft of the wheel loader of FIG.
- the hydraulic circuit diagram which shows the structure of the steering operation apparatus of the wheel loader of FIG.
- the figure which shows the internal structure of the cab of FIG. The figure which looked at the joystick lever of FIG. 4 from the upper surface.
- the perspective view which shows the structure of the force provision part of FIG.
- the plane schematic diagram which shows the structure of the link of the wheel loader of FIG.
- the figure for demonstrating steering operation of the wheel loader of Embodiment 1 which concerns on this invention.
- the figure for demonstrating steering operation of the wheel loader of Embodiment 1 which concerns on this invention.
- FIG. 11 is a cross-sectional configuration diagram showing the pilot valve of FIG. 10.
- A (b) Arrow sectional drawing between AA 'of FIG. 11, (c) (d) Arrow sectional drawing between BB' of FIG.
- FIG. 14 The side surface schematic diagram which shows arrangement
- FIG. 14A Schematic diagram of the pilot valve of FIG. 11,
- the hydraulic circuit diagram which shows the structure of the steering operation apparatus of the wheel loader of Embodiment 3 which concerns on this invention.
- the side surface schematic diagram which shows arrangement
- the side surface schematic diagram which shows arrangement
- the side surface schematic diagram which shows arrangement
- FIG. 1 is a schematic diagram showing a configuration of a wheel loader 1 according to the present embodiment.
- the wheel loader 1 according to the present embodiment includes a body frame 2, a work implement 3, a pair of front tires 4, a cab 5, an engine room 6, a pair of rear tires 7, and a steering operation device 8.
- the wheel loader 1 performs an earth and sand loading operation using the working machine 3.
- the body frame 2 is a so-called articulate type, and includes a front frame 11, a rear frame 12, and a connecting shaft portion 13.
- the front frame 11 is disposed in front of the rear frame 12.
- the pair of front tires 4 are attached to the left and right of the front frame 11.
- the pair of rear tires 7 are attached to the left and right of the rear frame 12.
- the connecting shaft portion 13 is provided at the center in the vehicle width direction, and connects the front frame 11 and the rear frame 12 so as to be swingable.
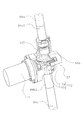
- FIG. 2 is an enlarged view of the vicinity of the cab 5 and the connecting shaft portion 13.
- the connecting shaft portion 13 has a pair of upper and lower front brackets 131, a pair of upper and lower rear brackets 132, and two center pins 133 arranged vertically.
- Each front bracket 131 is fixed to the front frame 11 and is provided so as to protrude horizontally from the rear portion of the front frame 11 toward the rear frame 12.
- Each rear bracket 132 has a pair of members 132 a arranged above and below the front bracket 131.
- the pair of bracket members 132 a of the rear bracket 132 are provided so as to protrude horizontally from the front portion of the rear bracket 132 toward the front frame 11.
- the center pin 133 is disposed along the vertical direction, and couples the pair of bracket members 132a and the front bracket 131 disposed therebetween so as to be rotatable. As shown in FIG. 2, a set of a front bracket 131, a rear bracket 132, and a center pin 133 is arranged vertically.
- the work machine 3 is driven by hydraulic oil from a work machine pump (not shown). As illustrated in FIG. 1, the work machine 3 includes a boom 14, a bucket 15, a lift cylinder 16, and a bucket cylinder 17.
- the boom 14 is attached to the front frame 11.
- the bucket 15 is attached to the tip of the boom 14.
- the lift cylinder 16 and the bucket cylinder 17 are hydraulic cylinders.
- One end of the lift cylinder 16 is attached to the front frame 11, and the other end of the lift cylinder 16 is attached to the boom 14.
- the boom 14 swings up and down by the expansion and contraction of the lift cylinder 16.
- One end of the bucket cylinder 17 is attached to the front frame 11, and the other end of the bucket cylinder 17 is attached to the bucket 15 via a bell crank 18. As the bucket cylinder 17 expands and contracts, the bucket 15 swings up and down.
- the cab 5 is placed on the rear frame 12, and includes a steering wheel handle and a joystick lever 24 (see FIG. 2), a lever for operating the work machine 3, various display devices, and the like. Is arranged.
- the engine room 6 is disposed on the rear frame 12 on the rear side of the cab 5 and houses the engine.
- the steering operation device 8 has steering cylinders 21 and 22, and the steering angle of the front frame 11 with respect to the rear frame 12 is changed by changing the flow rate of oil supplied to the steering cylinders 21 and 22. And the traveling direction of the wheel loader 1 is changed.
- FIG. 3 is a hydraulic circuit diagram showing the configuration of the steering operation device 8.
- the steering operation device 8 includes a pair of steering cylinders 21 and 22, a steering hydraulic circuit 23, a joystick lever 24, a connecting portion 25, a link mechanism 90, a force applying portion 27, and a control portion 28. And mainly.
- the pair of steering cylinders 21 and 22 are driven by hydraulic pressure.
- the pair of steering cylinders 21 and 22 are arranged side by side on the left and right sides in the vehicle width direction with the connecting shaft portion 13 interposed therebetween.
- the steering cylinder 21 is disposed on the left side of the connecting shaft portion 13 (see FIG. 1).
- the steering cylinder 22 is disposed on the right side of the connecting shaft portion 13.
- One end of each of the steering cylinders 21 and 22 is attached to the front frame 11, and the other end is attached to the rear frame 12.
- the steering cylinder 21 is provided with an extension port 21a and a contraction port 21b
- the steering cylinder 22 is provided with an extension port 22a and a contraction port 22b.
- the steering cylinder 21 when oil is supplied to the contraction port 21b of the steering cylinder 21 and the extension port 22a of the steering cylinder 22, and the oil is discharged from the extension port 21a of the steering cylinder 21 and the contraction port 22b of the steering cylinder 22, the steering cylinder 21 is The steering cylinder 22 expands and contracts. As a result, the steering angle ⁇ s changes and the vehicle turns to the left.
- a steering angle detector 104 that detects the steering angle ⁇ s is provided in the vicinity of the connecting shaft portion 13 disposed between the steering cylinders 21 and 22.
- the steering angle detection unit 104 is configured by, for example, a potentiometer, and the detected steering angle ⁇ s is sent to the control unit 28 as a detection signal.
- the steering cylinder 21 is provided with a cylinder stroke sensor 106 for detecting the cylinder stroke
- the steering cylinder 22 is provided with a cylinder stroke sensor 107 for detecting the cylinder stroke.
- the detection values of the cylinder stroke sensors 106 and 107 may be sent to the control unit 28 to detect the steering angle ⁇ s.
- the steering hydraulic circuit 23 is a hydraulic circuit for adjusting the flow rate of oil supplied to the steering cylinders 21 and 22.
- the steering hydraulic circuit 23 includes a main hydraulic circuit 30 and a pilot hydraulic circuit 40.
- the main hydraulic circuit 30 is a circuit that supplies oil from the main hydraulic source 31 to the steering cylinders 21 and 22 and includes a steering valve 32.
- the main hydraulic power source 31 includes a hydraulic pump and a relief valve.
- the steering valve 32 is a spool type valve, and is a flow rate adjusting valve that adjusts the flow rate of oil supplied to the steering cylinders 21 and 22 in accordance with the input pilot pressure.
- the steering valve 32 has a main pump port P1, a main drain port P2, a first steering port P3, and a second steering port P4.
- the main pump port P1 is connected to the main hydraulic pressure source 31 via the main hydraulic line 36.
- the main drain port P ⁇ b> 2 is connected to a drain tank DT that collects oil via a main drain pipe line 37.
- the first steering port P3 is connected to the contraction port 21b of the steering cylinder 21 and the extension port 22a of the steering cylinder 22 via the first steering pipe line 38.
- the second steering port P4 is connected to the extension port 21a of the steering cylinder 21 and the contraction port 22b of the steering cylinder 22 via the second steering conduit 39.
- the steering valve 32 has a valve body 33 that is a spool that can move to a neutral position Ns, a left steering position Ls, and a right steering position Rs.
- the valve element 33 When the valve element 33 is disposed at the neutral position Ns, the main pump port P1 and the main drain port P2 communicate with each other. In this case, the first steering port P3 and the second steering port P4 are not in communication with either port.
- the valve element 33 is disposed at the left steering position Ls, the main pump port P1 and the first steering port P3 communicate with each other, and the main drain port P2 and the second steering port P4 communicate with each other.
- the valve element 33 When the valve element 33 is disposed at the right steering position Rs, the main pump port P1 and the second steering port P4 communicate with each other, and the main drain port P2 and the first steering port P3 communicate with each other.
- the steering valve 32 has a first pilot chamber 34 and a second pilot chamber 35.
- the valve element 33 When the pilot pressure is not supplied to the first pilot chamber 34 and the second pilot chamber 35 and when the same pilot pressure is supplied to the first pilot chamber 34 and the second pilot chamber 35, the valve element 33 is in the neutral position. Located in Ns. In a state where the pilot pressure is supplied only to the first pilot chamber 34, the valve element 33 is positioned at the left steering position Ls. In a state where the pilot pressure is supplied only to the second pilot chamber 35, the valve element 33 is positioned at the right steering position Rs. When the valve body 33 is located at the left steering position Ls and the right steering position Rs, the steering valve 32 changes the opening area through which oil from the main hydraulic power source 31 passes according to the supplied pilot pressure. . Thereby, the steering valve 32 controls the flow rate of the oil supplied to the steering cylinder 21 or the steering cylinder 22 according to the pilot pressure.
- the pilot hydraulic circuit 40 is a circuit for supplying oil from the pilot hydraulic power source 43 to the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32.
- the pilot hydraulic circuit 40 includes a variable pressure reducing unit 41 and a pilot valve 42.
- Variable decompression unit The variable decompression unit 41 reduces and adjusts the hydraulic pressure sent from the pilot hydraulic source 43 to the pilot valve 42.
- the variable pressure reducing unit 41 incorporates an electromagnetic pressure reducing valve, and controls the hydraulic pressure in response to a command signal from the control unit 28.
- Pilot Valve The pilot valve 42 is a spool type valve that adjusts the pilot pressure input from the pilot hydraulic power source 43 to the steering valve 32.
- the spool-type pilot valve 42 includes a cylindrical sleeve 50, a spool 51 that can move along the axial direction inside the sleeve 50, and an urging spring 52.
- the sleeve 50 has a pilot pump port P5, a pilot drain port P6, a first pilot port P7, and a second pilot port P8.
- the pilot pump port P ⁇ b> 5 is connected to the variable pressure reducing unit 41 through the pilot hydraulic line 44, and the variable pressure reducing unit 41 is connected to the pilot hydraulic pressure source 43.
- the pilot drain port P6 is connected to a drain tank DT that collects oil via a pilot drain pipe line 45.
- the first pilot port P ⁇ b> 7 is connected to the first pilot chamber 34 of the steering valve 32 via the first pilot pipeline 46.
- the second pilot port P8 is connected to the second pilot chamber 35 of the steering valve 32 via the second pilot pipe line 47.
- the spool 51 is movable within the sleeve 50 to a neutral position Np, a left pilot position Lp, and a right pilot position Rp.
- the biasing spring 52 biases the spool 51 so that the spool 51 is positioned at the neutral position Np with respect to the sleeve 50.
- the pilot pump port P5 When the spool 51 is in the neutral position Np with respect to the sleeve 50, the pilot pump port P5, the pilot drain port P6, the first pilot port P7, and the second pilot port P8 communicate with each other.
- the pilot pump port P5 and the first pilot port P7 communicate with each other, and the pilot drain port P6 and the second pilot port P8 communicate with each other.
- the pilot pump port P5 and the second pilot port P8 communicate with each other, and the pilot drain port P6 and the first pilot port P7 communicate with each other.
- the pilot valve 42 is provided with a spool position detection sensor 108 that detects the position of the spool 51. The detection value of the spool position detection sensor 108 is transmitted to the control unit 28.
- FIG. 4 shows the configuration inside the cab 5.
- a driver's seat 5a on which an operator is seated is provided in the cab 5.
- a steering box 80 is disposed on the left side of the driver seat 5a in the vehicle width direction.
- the joystick lever 24 is disposed to project obliquely upward from the steering box 80 toward the front.
- the connecting portion 25 connects the joystick lever 24 and a link mechanism 90 described later.
- the connecting portion 25 mainly includes a steering operation shaft 81, a connecting bar 82, a universal joint portion 83, and an output shaft 84.
- the steering operation shaft 81 is arranged in the vertical direction, and is supported by the steering box 80 so as to be rotatable about its central axis Q.
- the connection bar 82 is disposed in the steering box 80 and connects the joystick lever 24 and the steering operation shaft 81.
- the universal joint portion 83 connects the steering operation shaft 81 and the output shaft 84 disposed in the vicinity of the driver's seat 5a.
- the universal joint part 83 has a center part 83a that can be expanded and contracted, and joint parts 83b and 83c that are arranged at both ends of the center part 83a.
- the joint portion 83 b is connected to the steering operation shaft 81.
- the joint portion 83 c is connected to the output shaft 84.
- the output shaft 84 outputs the operation of the joystick lever 24 transmitted through the connecting bar 82 and the universal joint portion 83 to the link mechanism 90.
- the output shaft 84 extends to the lower side of the floor surface 5 b of the cab 5.
- the output shaft 84 is configured by connecting a lever side shaft portion 84a, a torque input shaft portion 84b, and a link side shaft portion 84c in order (see FIG. 6 described later). That is, one end of the lever side shaft portion 84a is connected to the connecting bar 82, and the other end of the lever side shaft portion 84a is connected to one end of the torque input shaft portion 84b.
- the other end of the torque input shaft portion 84 b is connected to one end of the link side shaft portion 84 c, and the other end of the link side shaft portion 84 c is connected to the universal joint portion 83.
- Auxiliary force or reaction force from a force applying unit 27 described later is input to the torque input shaft portion 84b.
- FIG. 5 is a plan view of the vicinity of the joystick lever 24 as viewed from above.
- the joystick lever 24 is formed to project obliquely upward from an arc-shaped hole 85 formed in the upper surface of the steering box 80.
- the joystick lever 24 can turn in the horizontal direction about the steering operation shaft 81 (specifically, the central axis Q).
- An R mark is formed on the right edge of the hole 85 of the steering box 80, and an L mark is formed on the left edge.
- the steering operation shaft 81 when the operator rotates the joystick lever 24 from the center position to the right by the rotation angle ⁇ in, the steering operation shaft 81 also rotates to the right by the rotation angle ⁇ in.
- the rotation of the rotation angle ⁇ in of the steering operation shaft 81 is transmitted to the link mechanism 90 (described later) via the universal joint portion 83, and the spool 51 of the pilot valve 42 moves to the right pilot position Rp, and moves to the right. Articulate operation is started.
- the rotation angle ⁇ in of the joystick lever 24 is detected by the first rotation angle detection unit 101 configured by, for example, a rotary sensor.
- the operator needs to operate the joystick lever 24 against the urging spring 52 of the pilot valve 42 when no assisting force or reaction force is input by the force applying unit 27.
- FIG. 6 is a perspective view showing the force applying unit 27.
- the force applying unit 27 applies an assisting force or a reaction force to the operation of the joystick lever 24.
- the force applying unit 27 includes an electric motor 111 and a worm gear 112.
- the worm gear 112 has a cylindrical worm 112a and a worm wheel 112b.
- the worm wheel 112b is provided around the torque input shaft portion 84b described above and meshes with the cylindrical worm 112a.
- the output shaft of the electric motor 111 is connected to the cylindrical worm 112a, and rotates the cylindrical worm 112a around its central axis.
- the electric motor 111 is driven based on a command from the drive circuit 204 provided in the control unit 28.
- the first end 84b1 of the torque input shaft portion 84b is connected to the lever side shaft portion 84a, and the second end 84b2 is connected to the link side shaft portion 84c.
- the electric motor 111 is driven, the cylindrical worm 112a rotates, the worm wheel 112b rotates by the rotation, and a torque is also generated in the torque input shaft portion 84b fixed to the worm wheel 112b.
- By changing the rotational direction of the cylindrical worm 112a it is possible to apply a rotational force to the torque input shaft portion 84b in either the left rotation or the right rotation.
- an auxiliary force is applied to the operation of the joystick lever 24 by applying a force in the clockwise direction to the torque input shaft portion 84b.
- a reaction force is applied to the operation of the joystick lever 24 by applying a force in the left rotation direction to the torque input shaft portion 84b.
- a torque sensor 103 is provided on the torque input shaft portion 84b.
- the torque sensor 103 detects torque generated in the torque input shaft portion 84b when the operator applies a force to the joystick lever 24.
- the torque sensor 103 according to the present embodiment detects, for example, the rotation direction of the torque input shaft portion 84b and the torque generated in the torque input shaft portion 84b by detecting torsion of the torsion bar with a coil. The detected rotation direction and torque T are output to the control unit 28 as a steering torque signal.
- the link mechanism 90 transmits the operation in the rotation direction by the joystick lever 24 to the rotation member 92 that is a predetermined distance away from the joystick lever 24 in a plan view, and then converts the operation into a linear direction and transmits it to the pilot valve 42. .
- the link mechanism 90 is disposed on the lower side of the cab 5, and horizontally connects the connection portion 25 connected to the joystick lever 24 and the pilot valve 42. Are formed along.
- FIG. 7 is a schematic plan view for explaining the configuration of the link mechanism 90. As shown in FIG. 7, the link mechanism 90 includes a first arm member 91, a rotating member 92, a first rod member 93, and a second rod member 94.
- the first arm member 91 is fixed to the lower end of the output shaft 84.
- the arm member 91 is disposed along the horizontal direction from the lower end of the output shaft 84.
- the rotating member 92 is rotatably supported by a support shaft 95 disposed on the connecting shaft portion 13.
- the support shaft 95 is disposed so that its axial direction is along the articulate center A, and is fixed to the bracket member 132 a of the rear bracket 132. That is, since the support shaft 95 is fixed to the rear frame 12, it does not rotate with the front frame 11 even if an articulating operation is performed.
- the rotating member 92 has a second arm member 92a and a third arm member 92b.
- One end of the second arm member 92 a is rotatably supported by the support shaft 95.
- One end of the third arm member 92b is rotatably supported by the support shaft 95.
- the second arm member 92a and the third arm member 92b are formed so as to protrude from the support shaft 95 in the horizontal direction.
- the second arm member 92a and the third arm member 92b are fixed to each other with a predetermined angle. Therefore, the second arm member 92a and the third arm member 92b can rotate with respect to the support shaft 95 while maintaining a predetermined angle.
- the 1st rod member 93 is a rod-shaped member, Comprising: The front-end
- a straight line connecting the connecting portion of the first rod member 93 with the second arm member 92a and the support shaft 95 is T3
- the connecting portion of the first rod member 93 with the first arm member 91 and the output shaft 84 are
- T4 be a straight line connecting
- T5 a straight line connecting the connecting portion of the first rod member 93 to the first arm member 91 and the connecting portion of the first rod member 93 to the second arm member 92a
- T6 be the straight line that connects.
- Each of the components is arranged so that the straight line T3 and the straight line T4 are parallel, the straight line T5 and the straight line T6 are parallel, and a parallel link is formed as a whole.
- the second rod member 94 connects the tip of the third arm member 92b and the pilot valve 42.
- One end of the second rod member 94 is rotatably connected to the tip of the third arm member 92b.
- the other end of the second rod member 94 is rotatably connected to the spool 51 of the pilot valve 42.
- the other end of the second rod member 94 is rotatably connected to a connecting member 51 a formed at the rear portion of the spool 51.
- the moving direction B (axis V direction) of the spool 51 is the front-rear direction of the vehicle body when the front frame 11 is not inclined with respect to the rear frame 12 (indicated by an arrow Y in the figure). Is fixed to the front frame 11 so as to coincide with.
- the rotation operation of the joystick lever 24 is transmitted to the pilot valve 42 fixed to the front frame 11.
- the control unit 28 has a drive circuit 204 that drives the electric motor 111. Based on the torque T, the deviation angle ⁇ , and the speed V, the control unit 28 can apply an assisting force or a reaction force to the operation of the joystick lever 24 by the operator. Further, the control unit 28 also controls the variable pressure reducing unit 41 as shown in FIG. 2 based on the rotation angle ⁇ in, the rotation angle ⁇ s, and the vehicle speed V by the vehicle speed sensor 105 shown in FIG. Thereby, the original pressure of the pilot pressure sent to the pilot valve 42 can be controlled so that the flow rate of oil to the left and right steering cylinders 21 and 22 does not change rapidly. The variable pressure reducing unit 41 may be controlled based on the position of the spool 51 detected by the spool position detection sensor 108 and the vehicle speed V instead of the rotation angle ⁇ in and the rotation angle ⁇ s.
- control of the electric motor 111 and the variable pressure reducing unit 41 by the control unit 28 may be performed by wire or wirelessly.
- FIG. 8A to 8D are schematic diagrams for explaining the articulating operation of the wheel loader 1.
- FIG. 8A to 8D are schematic diagrams for explaining the articulating operation of the wheel loader 1.
- FIG. 8A to 8D are schematic diagrams for explaining the articulating operation of the wheel loader 1.
- the neutral position Np is obtained, and when the spool 51 is positioned at the front portion in the front-rear direction in the sleeve 50.
- the right pilot position Rp is reached, and the left pilot position Lp is reached when the spool 51 is located in the rear portion of the sleeve 50.
- the output shaft 84 is located at a predetermined initial position, and the rotation angle ⁇ in by the output shaft 84 is zero.
- the rotation angle ⁇ in indicates the rotation angle from the center position of the joystick lever 24 as shown in FIG.
- the steering angle ⁇ s is also zero.
- the steering angle ⁇ s indicates an angle from the state where the state along the front-rear direction with respect to the rear frame 12 is zero.
- the spool 51 is located at the neutral position Np (see FIG. 3) with respect to the sleeve 50.
- the pilot pressures of the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 are the same, and the valve body 33 of the steering valve 32 is also in the neutral position Ns. For this reason, oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is maintained at zero.
- the second arm member 92a rotates clockwise (see arrow E) about the support shaft 95 (articulate center A).
- the third arm member 92b fixed to the second arm member 92a also rotates to the right about the support shaft 95 (see arrow E).
- Rotation of the third arm member 92b in the right direction causes the second rod member 94 to move forward (in the direction of arrow F) as shown in FIG. 8B. Due to the forward movement of the second rod member 94, the spool 51 is pushed forward (in the direction of arrow F) in the sleeve 50 to move to the right pilot position Rp, and pilot pressure is supplied to the second pilot port P8. The pilot pressure is supplied to the second pilot chamber 35.
- the valve element 33 of the steering valve 32 moves to the right steering position Rs side, and oil is supplied to the extension port 21 a of the steering cylinder 21 and the contraction port 22 b of the steering cylinder 22, and the contraction port 21 b of the steering cylinder 21.
- the oil is discharged from the extension port 22a of the steering cylinder 22.
- the steering angle ⁇ s gradually increases, and the front frame 11 is directed rightward with respect to the rear frame 12.
- the link mechanism 90 When the operator stops the joystick lever 24 at a predetermined rotation angle ⁇ 1, the link mechanism 90 also stops. On the other hand, since the steering angle ⁇ s gradually increases, the spool 51 also moves backward. 8D, when the steering angle ⁇ s catches up with the rotation angle ⁇ 1, the spool 51 reaches the neutral position Np with respect to the sleeve 50. In this case, the pilot pressure in the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 is the same, and the steering valve 32 is also in the neutral position Ns. For this reason, oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is maintained at the rotation angle ⁇ 1.
- the spool 51 moves to the left pilot position Lp side with respect to the sleeve 50, and the pilot pressure is supplied to the first pilot port P7.
- the valve element 33 of the steering valve 32 moves to the left steering position Ls, oil is supplied to the contraction port 21b of the steering cylinder 21 and the extension port 22a of the steering cylinder 22, and the extension port 21a of the steering cylinder 21 and Oil is discharged from the contraction port 22 b of the steering cylinder 22.
- the steering angle ⁇ s gradually decreases from the rotation angle ⁇ 1.
- the third arm member 92 b and the second arm member 92 a are fixed to the rear frame 12 and do not rotate with the front frame 11, they are pushed by the second rod member 94 as the front frame 11 rotates.
- the spool 51 moves in the sleeve 50 forward.
- the spool 51 moves forward by the change of the steering angle ⁇ s.
- the steering angle ⁇ s gradually decreases from the rotation angle ⁇ 1, and when the steering angle ⁇ s becomes zero, as shown in FIG. Are disposed at the neutral position Np.
- the pilot pressures of the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 are the same, and the steering valve 32 is also in the neutral position Ns.
- oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is also returned to zero and maintained.
- the front frame 11 is returned to the direction along the front-rear direction with respect to the rear frame 12. Note that the case where the joystick lever 24 is rotated to the left is the same as described above, and is therefore omitted.
- the wheel loader 1 of the present embodiment controls the electric motor 111 based on the assist information stored in the control unit 28 so as to apply an assisting force or a reaction force based on the detected torque or the like. As described above, the operation with the joystick lever 24 is performed, but the control unit 28 controls the electric motor 111 to apply an assisting force or a reaction force to the operation of the joystick lever 24 based on the detection signal from the torque sensor 103. To do.
- FIG. 9 is a diagram showing assist torque (assist torque information) to be applied to the torque detected by the torque sensor 103.
- the assist torque information shown in FIG. 9 is stored in the storage device of the control unit 28.
- the positive lever input torque indicates the torque generated by the rotation of the joystick lever 24 in the right direction
- the negative lever input torque indicates the torque generated by the rotation of the joystick lever 24 in the left direction.
- a case where a positive assist torque is applied to the right rotation by the force applying unit 27 and a case where a negative assist torque is applied to the left rotation by the force applying unit 27 are illustrated.
- the line L1 in FIG. 9 indicates that when the joystick lever 24 is operated to the right side, a force is applied to the torque input shaft portion 84b in the clockwise direction.
- the joystick lever 24 is operated to the left side. In this case, a force is applied to the torque input shaft portion 84b in the left rotation direction.
- the assist torque is set such that the assist force applied increases as the absolute value of the torque detected by the torque sensor 103 increases.
- FIG. 9 shows a dotted line L2 ′ that is symmetrical to the line L2 with respect to the horizontal axis.
- the joystick lever 24 is operated to the right side, as can be seen by comparing the dotted line L2 ′ and the line L1.
- the assist force is applied symmetrically. That is, when the absolute value of the lever input torque is equal in the left / right operation of the joystick lever 24, the same amount of assist force is applied.
- the control unit 28 obtains the assist force from the torque based on the assist torque information shown in FIG. 9, and applies the assist force.
- the electric motor 111 is controlled. Thereby, the lever reaction force when operating the joystick lever 24 can be reduced, and the operation can be performed with a light force.
- Embodiment 2 Next, the wheel loader 1 in Embodiment 2 which concerns on this invention is demonstrated. Unlike the first embodiment, the wheel loader 1 according to the second embodiment uses a rotary valve as a pilot valve instead of a spool valve. In the second embodiment, the pilot valve is arranged at the articulate center A. In the second embodiment, differences from the first embodiment will be mainly described. In the second embodiment, the same components as those in the first embodiment are denoted by the same reference numerals, and description thereof is omitted.
- FIG. 10 is a hydraulic circuit diagram showing the configuration of the steering operation device 208 of the second embodiment.
- a pilot valve 242 that is a rotary valve is provided.
- FIG. 11 is a cross-sectional configuration diagram of the pilot valve 242.
- the pilot valve 242 mainly includes a valve body portion 60, an operation input shaft 61, a feedback input shaft 62, a housing 63, a first spring 64, a second spring 65, and a feedback portion 66.
- the operation input shaft 61 is rotatably provided around the central axis O and is inserted into the housing 63.
- the operation input shaft 61 is connected to a joystick lever 24 (described later) via a connecting portion 25.
- the operation input shaft 61 rotates at the same rotation angle as the left / right rotation angle ⁇ in of the joystick lever 24.
- the feedback input shaft 62 is arranged coaxially with the operation input shaft 61 and is provided to be rotatable around the central axis O.
- the feedback input shaft 62 is inserted into the housing 63 so as to face the operation input shaft 61.
- the feedback input shaft 62 is connected to the front frame 11 via a feedback link mechanism 26 described later, and rotates at the same rotation angle as the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12.
- the housing 63 accommodates a valve body 60 and a feedback unit 66, and a pilot pump port P5, a pilot drain port P6, a first pilot port P7, and a second pilot port P8 are formed.
- the valve body 60 has an operation spool 71 and an operation sleeve 72, and when the operation spool 71 rotates with respect to the operation sleeve 72, the neutral position Np, the left pilot position Lp, and the right pilot position Rp are obtained.
- the operation spool 71 has a substantially cylindrical shape, is disposed coaxially with the operation input shaft 61, and is connected to the operation input shaft 61.
- the joystick lever 24 is connected to the operation input shaft 61 via the connecting portion 25 and the link mechanism 290. When the operator operates the joystick lever 24 to the right side of the rotation angle ⁇ in, the operation input shaft 61 and the operation spool 71 are also connected to the central axis O.
- slits 71a and 71b are formed along the circumferential direction at two positions opposed so as to sandwich the central axis O therebetween.
- the operation sleeve 72 is substantially cylindrical, and is disposed outside the operation spool 71 and inside the housing 63 so as to be rotatable with respect to the operation spool 71 and the housing 63.
- right rotation and left rotation indicate rotation directions when viewed from above.
- FIG. 12A is a cross-sectional view taken along the line AA ′ perpendicular to the central axis O.
- the operation spool 71 is provided with square holes 71c and 71d on the opposing walls in the diameter direction.
- rectangular grooves 72c and 72d are formed in the diametrically opposed walls at the end of the operation sleeve 72 on the operation input shaft 61 side.
- the first spring 64 is formed of two sets of leaf spring portions 64a in which a plurality of convex leaf springs are overlapped.
- the two sets of leaf spring portions 64a are arranged so that the protrusions face each other so as to be X-shaped in FIG.
- the two sets of leaf spring portions 64 a pass through the holes 71 c and 71 d of the operation spool 71, and both ends are inserted into the grooves 72 c and 72 d of the operation sleeve 72.
- the operation spool 71 and the operation sleeve 72 are connected by the first spring 64.
- the position in the circumferential direction of the hole 71c and the groove 72c substantially coincides, and the position in the circumferential direction of the hole 71d and the groove 72d substantially coincides with the valve body 60 being in the neutral position Np. It is in a position.
- the operation spool 71 rotates with respect to the operation sleeve 72, and the operation spool 71 moves with respect to the operation sleeve 72 in the left pilot position Lp or the right pilot. Move to position Rp.
- the operation spool 71 rotates to the right with respect to the operation sleeve 72 and moves to the right pilot position Rp.
- the operation spool 71 rotates to the left with respect to the operation sleeve 72 and moves to the left pilot position Lp.
- the first spring 64 biases the operation spool 71 so as to be positioned at the neutral position Np with respect to the operation sleeve 72.
- the feedback unit 66 feeds back the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12 to the valve body 60.
- the feedback portion 66 mainly includes a feedback spool 73, a feedback sleeve 74, a drive shaft 75, a first center pin 76, and a restriction portion 78.
- the drive shaft 75 is disposed between the operation input shaft 61 and the feedback input shaft 62 and coaxially with the operation input shaft 61 and the feedback input shaft 62 (center axis O).
- the drive shaft 75 is disposed inside the operation spool 71.
- a first center pin 76 is disposed perpendicular to the center axis O at the end of the drive shaft 75 on the operation input shaft 61 side. Both ends of the first center pin 76 pass through the slits 71 a and 71 b and are fixed to the operation sleeve 72.
- the rotation angle of the operation spool 71 with respect to the operation sleeve 72 is restricted to an angle within a predetermined range by the first center pin 76 and the slits 71a and 71b. Further, since the first center pin 76 is fixed to the operation sleeve 72 and the drive shaft 75, when the drive shaft 75 rotates, the operation sleeve 72 integrated with the drive shaft 75 also rotates.
- the feedback spool 73 has a substantially cylindrical shape, is disposed coaxially with the feedback input shaft 62, and is connected to the feedback input shaft 62. Near the feedback input shaft 62 of the feedback spool 73, slits 73a and 73b are formed along the circumferential direction at two positions facing each other so as to sandwich the central axis O therebetween.
- a drive shaft 75 is disposed inside the feedback spool 73.
- the feedback input shaft 62 is connected to the front frame 11 via a feedback link mechanism 26 described later, and when the front frame 11 rotates to the right of the steering angle ⁇ s with respect to the rear frame 12, the feedback input shaft 62 and the feedback spool 73. Also rotates to the right of the same rotation angle ⁇ s as the steering angle ⁇ s.
- the feedback sleeve 74 has a substantially cylindrical shape, and is disposed outside the feedback spool 73 and inside the housing 63 so as to be rotatable with respect to the feedback spool 73 and the housing 63.
- the restricting portion 78 restricts the rotation of the feedback sleeve 74 with respect to the feedback spool 73 to an angle within a predetermined range.
- the restricting portion 78 includes a second center pin 77 and wall portions 73ae and 73be (see FIG. 7 described later) at both ends in the circumferential direction of the slits 73a and 73b.
- the second center pin 77 is arranged perpendicular to the center axis O at the end of the drive shaft 75 on the feedback input shaft 62 side. Both ends of the second center pin 77 are fixed to the feedback sleeve 74 through the slits 73a and 73b. The rotation of the feedback sleeve 74 relative to the feedback spool 73 is restricted to an angle within a predetermined range by the second center pin 77 and the slits 73a and 73b. Further, since the second center pin 77 is fixed to the feedback sleeve 74 and the drive shaft 75, when the feedback sleeve 74 rotates, the drive shaft 75 integrated with the feedback sleeve 74 also rotates. With the rotation of the drive shaft 75, the operation sleeve 72 fixed to the drive shaft 75 by the first center pin 76 rotates.
- FIG. 12C is a cross-sectional view taken along the line BB ′ in FIG.
- the feedback spool 73 is provided with square holes 73c and 73d in each of the opposing walls in the diameter direction.
- the second spring 65 is formed of two sets of leaf spring portions 65a obtained by superimposing a plurality of convex leaf springs.
- the two sets of leaf spring portions 65a are arranged so that the protrusions face each other so as to be X-shaped in FIG.
- the two sets of leaf spring portions 65 a pass through the holes 73 c and 73 d of the feedback spool 73, and both ends are inserted into the grooves 74 c and 74 d of the feedback sleeve 74.
- the feedback spool 73 and the feedback sleeve 74 are connected by the second spring 65.
- the hole 73c and the groove 74c are aligned in the circumferential direction
- the hole 73d and the groove 74d are aligned in the circumferential direction.
- the feedback sleeve 74 is urged by the second spring 65 so that the circumferential positions of the grooves 74 c and 74 d are aligned with the circumferential positions of the holes 73 c and 73 d of the feedback spool 73.
- the first spring 64 bends until the operation spool 71 is restricted with respect to the operation sleeve 72, but the first spring 64 starts to bend by applying a force greater than the reaction force generated in the first spring 64 until the operation spool 71 is restricted.
- Two springs 65 are set. Although details will be described later with reference to FIG. 14, when the operation spool 71 rotates to an angle regulated with respect to the operation sleeve 72 and further the joystick lever 24 is operated, as shown in FIG.
- the second spring 65 is bent and the feedback sleeve 74 rotates with respect to the feedback spool 73.
- FIG. 12D is a cross-sectional view taken along the line BB ′ in FIG. 11 and is viewed from below, so that the arrow in the rotation direction is opposite to that in FIG. .
- the operation sleeve 72 fixed via the feedback sleeve 74, the second center pin 77, the drive shaft 75, and the first center pin 76 rotates, and a change occurs in the difference between the rotation angles of the operation spool 71 and the operation sleeve 72.
- the pilot pressure is changed.
- the position of the operation spool 71 with respect to the operation sleeve 72 depends on the difference ⁇ between the rotation angle ⁇ in of the operation input shaft 61 and the rotation angle fb of the feedback input shaft 62 (which coincides with the steering angle ⁇ s). , Move to the neutral position Np, the left pilot position Lp, or the right pilot position Rp. When the rotation angle difference ⁇ is zero, the operation spool 71 is positioned at the neutral position Np with respect to the operation sleeve 72.
- the pilot valve 42 passes oil from the pilot hydraulic power source 43 according to the rotation angle difference ⁇ .
- the opening area to be changed is changed.
- the pilot pressure sent from the pilot valve 42 to the steering valve 32 is adjusted according to the rotation angle difference ⁇ .
- the operation input shaft 61 is provided with a first rotation angle detection unit 101 configured by, for example, a rotary sensor.
- the first rotation angle detection unit 101 detects the rotation angle ⁇ in of the operation input shaft 61.
- the feedback input shaft 62 is provided with a second rotation angle detection unit 102 configured by, for example, a rotary sensor.
- the rotation angles ⁇ in and ⁇ fb detected by the first rotation angle detection unit 101 and the second rotation angle detection unit 102 are sent to the control unit 28 as detection signals.
- the steering angle detection unit 104 detects the steering angle ⁇ s in the connecting shaft unit 13 as well, but the rotation angle ⁇ fb of the feedback input shaft 62 coincides with the steering angle ⁇ s.
- the portion 104 may not be provided.
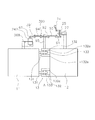
- FIG. 13 is a schematic side view for illustrating the arrangement of the pilot valve 242. As shown in FIG. 13, the pilot valve 242 is disposed on the articulate center A above the connecting shaft portion 13. The pilot valve 242 is arranged so that its central axis O coincides with the articulate center A.
- a bracket 268 is fixed to the rear frame 12, and the bracket 268 extends from the rear frame 12 to the articulate center A.
- a housing 63 of the pilot valve 242 is fixed to the bracket 268.
- a link mechanism 290 is provided instead of the link mechanism 90.
- the link mechanism 290 includes the first arm member 91 and the first rod member 93, but does not include the rotating member 92 and the second rod member 94, unlike the link mechanism 90 of the first embodiment.
- the link mechanism 290 includes an input lever member 291 that is fixed to the operation input shaft 61.
- the input lever member 291 is provided so as to protrude in the horizontal direction from the operation input shaft 61.
- the front end of the input lever member 291 and the first rod member 93 are connected to each other so as to be rotatable.
- the lower end of the feedback input shaft 62 is connected to the front frame 11 by the feedback link mechanism 26.
- the feedback input shaft 62 rotates at the same rotation angle as the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12.
- the feedback link mechanism 26 includes a follow-up lever 96, a follow-up link 97, and a bracket 98.
- the follow-up link 97 is fixed to the feedback input shaft 62 of the pilot valve 242.
- the bracket 98 is fixed to the front frame 11.
- the follow-up link 97 connects the follow-up lever 96 and the bracket 98.
- the pilot valve 242 fixed to the rear frame 12 and the front frame 11 are linked.
- the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12 and the rotation angle ⁇ fb of the feedback input shaft 62 become the same angle.
- the feedback input shaft 62 when the front frame 11 rotates to the right of the steering angle ⁇ s about the connecting shaft 13 with respect to the rear frame 12, the feedback input shaft 62 also rotates to the right by the rotation angle ⁇ s via the feedback link mechanism 26.
- the feedback input shaft 62 is also rotated to the left by the rotation angle ⁇ s via the feedback link mechanism 26.
- FIG. 14A is a diagram schematically showing the pilot valve 42.
- FIG. 14B is a diagram showing the relationship between the vehicle body-lever deviation angle and the lever reaction force.
- FIG. 14C is a cross-sectional view taken along arrows CC ′, DD ′, EE ′, and FF ′ of FIG. 14A when the deviation angle ⁇ is zero.
- FIG. 14D is a cross-sectional view taken along arrows CC ′, DD ′, EE ′, and FF ′ of FIG. 14A when the deviation angle ⁇ is ⁇ 2.
- FIG. 14E is a cross-sectional view taken along arrows CC ′, DD ′, EE ′, and FF ′ of FIG. 14A when the deviation angle ⁇ is ⁇ 3.
- the cross-sectional views between CC ′, DD ′, EE ′, and FF ′ are all viewed from above.
- play of the joystick lever 24 is not taken into consideration for easy understanding of the explanation.
- the operation input shaft 61 When the operator rotates the joystick lever 24 from the center position at the rotation angle ⁇ in, the operation input shaft 61 also rotates at the rotation angle ⁇ in.
- the steering angle ⁇ s gradually increases following the rotation angle ⁇ in.
- the rotation angle ⁇ in of the joystick lever 24 indicates a target steering angle, and the steering angle ⁇ s indicates an actual actual steering angle.
- the feedback input shaft 62 In response to the change in the steering angle ⁇ s, the feedback input shaft 62 also rotates at the same rotation angle ⁇ s as the steering angle ⁇ s. Then, the feedback spool 73 is rotated together with the feedback input shaft 62, and the feedback sleeve 74 connected through the second spring 65 is also rotated by the rotation.
- the operation sleeve 72 is also rotated by the rotation of the feedback sleeve 74. That is, the difference between the rotation angles of the operation spool 71 and the operation sleeve 72 corresponds to the deviation angle ⁇ (see FIG. 12B).
- the first spring 64 urges the operation spool 71 to the neutral position Np with respect to the operation sleeve 72, in order to increase the deviation angle ⁇ , the first spring 64 is against the urging force of the first spring 64. It is necessary to operate the joystick lever 24.
- the first spring 64 has a spring characteristic S1 shown in FIG. In the spring characteristic S1 of the first spring 64, in order to rotate the operation input shaft 61, it is necessary to operate the joystick lever 24 with a force greater than or equal to the initial reaction force F1 (a force necessary to start bending the first spring 64). There is. In the spring characteristic S1 of the first spring 64, the lever reaction force increases as the deviation angle ⁇ increases. That is, as the deviation angle ⁇ increases, the force required to operate the joystick lever 24 increases.
- the first center pin 76 is arranged at the center of the slits 71 a and 71 b of the operation spool 71.
- the second center pin 77 is disposed at the center of the slits 73 a and 73 b of the feedback spool 73.
- the second center pin 77 is disposed at the center of the slits 73 a and 73 b of the feedback spool 73. If the reaction force by the first spring 64 when the deviation angle ⁇ is the angle ⁇ 2 is F2, the initial reaction force (because the second spring 65 starts to bend as shown in the spring characteristic S2 of the second spring 65). This is because the necessary force is set to F2. Note that the initial reaction force of the second spring 65 may be set to be larger than F2, or may be F2 or more.
- the second center pin 77 When the deviation angle ⁇ reaches ⁇ 3, as shown in FIG. 14E, the second center pin 77 is formed in the circumferential direction of the slit 73b and the wall portion 73ae formed in the circumferential direction of the slit 73a. It contacts the wall portion 73be. As described above, the second center pin 77 is rotatable by an angle ( ⁇ 3- ⁇ 2). That is, the pilot valve 42 is configured so that the deviation angle ⁇ cannot be larger than the angle ⁇ 3. For this reason, as shown in FIG. 14B, the lever reaction force rises linearly at an angle ⁇ 3. When the second center pin 77 abuts against the wall portions 73ae and 73be vigorously, a sudden recoil occurs, causing a burden on the operator's wrist. This angle ⁇ 3 is also called a catch-up angle.
- the operation input shaft 61 is positioned at a predetermined initial position, and the rotation angle ⁇ in by the operation input shaft 61 is zero. Further, since the steering angle ⁇ s is also zero, the feedback input shaft 62 is also located at a predetermined initial position.
- the steering angle ⁇ s is an angle from the state where the state along the front-rear direction with respect to the rear frame 12 is zero.
- the rotation angle ⁇ in indicates the rotation angle from the center position of the joystick lever 24 as shown in FIG. Further, when obtaining the deviation angle, for example, the rotation in the right direction may be calculated as a positive angle, and the rotation in the left direction may be calculated as a negative angle.
- the operation spool 71 is located at the neutral position Np shown in FIG.
- the pilot pressures of the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 are the same, and the valve body 33 of the steering valve 32 is also in the neutral position Ns.
- the operator applies an operating force Fin to rotate the joystick lever 24 from the center position to the right as shown in FIG.
- the operating force Fin exceeds F1 of the first spring 64
- the operation input shaft 61 rotates to the right in the same manner as the joystick lever 24, and the rotation angle ⁇ in of the operation input shaft 61 increases.
- the operation spool 71 rotates clockwise with respect to the operation sleeve 72 as the operation input shaft 61 rotates.
- the operation sleeve 72 is integrated with the feedback sleeve 74, and the feedback sleeve 74 is connected to the feedback spool 73 by the second spring 65.
- the initial reaction force F2 of the 2nd spring 65 is more than the reaction force of the spring characteristic S1 of the 1st spring 64 shown in FIG.14 (b). Therefore, the operation sleeve 72 does not rotate with the operation spool 71, and the operation spool 71 rotates clockwise with respect to the operation sleeve 72.
- the operation spool 71 rotates clockwise with respect to the operation sleeve 72 and moves to the right pilot position Rp, where pilot pressure is supplied to the second pilot port P8 and pilot pressure is supplied to the second pilot chamber 35. .
- the valve element 33 of the steering valve 32 moves to the right steering position Rs, oil is supplied to the extension port 21a of the steering cylinder 21 and the contraction port 22b of the steering cylinder 22, and the contraction port 21b of the steering cylinder 21 and Oil is discharged from the extension port 22 a of the steering cylinder 22.
- the steering angle ⁇ s gradually increases, and the front frame 11 is directed to the right with respect to the rear frame 12 (see R in FIG. 3).
- the change in the steering angle ⁇ s is transmitted to the feedback input shaft 62 by the feedback link mechanism 26, and the feedback input shaft 62 rotates at the rotation angle ⁇ s.
- the operation input shaft 61 When the operator stops the joystick lever 24 at a predetermined rotation angle ⁇ 1, the operation input shaft 61 also stops at the rotation angle ⁇ 1. On the other hand, since the steering angle ⁇ s gradually increases, the rotation angle ⁇ s of the feedback input shaft 62 also increases.
- the feedback spool 73 rotates together with the feedback input shaft 62, and the feedback sleeve 74 connected to the feedback spool 73 via the second spring 65 also rotates. Since the feedback sleeve 74 is integrated with the operation sleeve 72 via the first center pin 76, the second center pin 77, and the drive shaft 75, the operation sleeve 72 rotates as the feedback sleeve 74 rotates.
- the rotation angle of the operation sleeve 72 and the operation spool 71 (deviation angle ⁇ ) is reduced by the rotation of the operation sleeve 72.
- the deviation angle ⁇ becomes zero.
- the operation spool 71 of the pilot valve 42 is located at the neutral position Np with respect to the operation sleeve 72.
- the pilot pressure in the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 is the same, and the steering valve 32 is also in the neutral position Ns. For this reason, oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is maintained at the rotation angle ⁇ 1.
- the steering angle ⁇ s is also maintained at the same rotation angle ⁇ 1.
- the front frame 11 is maintained to the right with respect to the rear frame 12 in the direction of the rotation angle ⁇ 1.
- the operation input shaft 61 rotates in the same manner, and the rotation angle ⁇ in of the operation input shaft 61 decreases.
- the operation spool 71 rotates left with respect to the operation sleeve 72 and moves to the left pilot position Lp, and the pilot pressure is supplied to the first pilot port P7.
- the valve element 33 of the steering valve 32 moves to the left steering position Ls, oil is supplied to the contraction port 21b of the steering cylinder 21 and the extension port 22a of the steering cylinder 22, and the extension port 21a of the steering cylinder 21 and Oil is discharged from the contraction port 22 b of the steering cylinder 22.
- the steering angle ⁇ s gradually decreases from the rotation angle ⁇ 1.
- the change in the steering angle ⁇ s is transmitted to the feedback input shaft 62 by the feedback link mechanism 26, and the feedback input shaft 62 rotates with the same change in the rotation angle as the change in the steering angle ⁇ s.
- the pilot pressures of the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 are the same, and the steering valve 32 is also in the neutral position Ns. For this reason, oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is also returned to zero and maintained. Thereby, the front frame 11 is returned to the direction along the front-rear direction with respect to the rear frame 12.
- the pilot valve 242 can be arranged at the articulate center A by providing the link mechanism 290.
- FIG. 15 is a hydraulic circuit diagram showing the configuration of the steering operation device 308 of the third embodiment.
- FIG. 16 is a cross-sectional configuration diagram of the pilot valve 242.
- FIG. 17 is a schematic side view for explaining the installation of the pilot valve 242.
- the feedback input shaft 62 and the housing 63 are fixed to the mount bracket 368.
- the mount bracket 368 is fixed to the front frame 11 as shown in FIG.
- the pilot valve 121 is fixed to the front frame 11.
- the link mechanism 390 of the present embodiment is further provided with an input lever member 391 in addition to the link mechanism 90 of the first embodiment. That is, the link mechanism 390 includes a first arm member 91, a rotating member 92, a first rod member 93, a second rod member 94, and an input lever member 391.
- the input lever member 391 is fixed to the operation input shaft 61.
- the input lever member 391 is provided so as to protrude from the operation input shaft 61 in the horizontal direction.
- the input lever member 391 is rotatably connected to the front end of the second rod member 94.
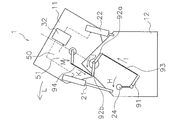
- FIG. 18A to 18D are diagrams showing an articulating operation of the wheel loader 1 according to the third embodiment.
- the straight line T2 that connects 391a and the central axis O is disposed vertically so that the neutral position Np is obtained.
- the operation spool 71 rotates clockwise with respect to the operation sleeve 72 as the operation input shaft 61 rotates.
- the operation sleeve 72 is integrated with the feedback sleeve 74, and the feedback sleeve 74 is connected to the feedback spool 73 by the second spring 65.
- the initial reaction force F2 of the 2nd spring 65 is more than the reaction force of the spring characteristic S1 of the 1st spring 64 shown in FIG.7 (b). Therefore, the operation sleeve 72 does not rotate with the operation spool 71, and the operation spool 71 rotates clockwise with respect to the operation sleeve 72.
- the operation spool 71 rotates clockwise with respect to the operation sleeve 72 and moves to the right pilot position Rp, where pilot pressure is supplied to the second pilot port P8 and pilot pressure is supplied to the second pilot chamber 35. .
- the valve element 33 of the steering valve 32 moves to the right steering position Rs, oil is supplied to the extension port 21a of the steering cylinder 21 and the contraction port 22b of the steering cylinder 22, and the contraction port 21b of the steering cylinder 21 and Oil is discharged from the extension port 22 a of the steering cylinder 22.
- the steering angle ⁇ s gradually increases, and the front frame 11 is directed rightward with respect to the rear frame 12 (see R in FIG. 18C).
- the input lever member 291 becomes the second rod member 94 with the articulating operation of the front frame 11 with respect to the rear frame 12.
- To turn left (see arrow M).
- the position of the input lever member 391 becomes a state where the straight line T1 and the straight line T2 are perpendicular to each other.
- the valve 42 is in the neutral position Np.
- the pilot pressure in the first pilot chamber 34 and the second pilot chamber 35 of the steering valve 32 is the same, and the steering valve 32 is also in the neutral position Ns. For this reason, oil is not supplied to or discharged from the left and right steering cylinders 21 and 22, and the steering angle ⁇ s is maintained at the rotation angle ⁇ 1.
- the steering angle ⁇ s is also maintained at the same rotation angle ⁇ 1.
- the front frame 11 is maintained to the right with respect to the rear frame 12 in the direction of the rotation angle ⁇ 1.
- the first arm member 91 also rotates counterclockwise (see arrow H) as shown in FIG. 18E.
- the first rod member 93 moves forward (see arrow I).
- the second arm member 92a and the third arm member 92b rotate counterclockwise about the articulate center A (see arrow J), and the second rod member 94 moves backward (see arrow K).
- the input lever member 291 also rotates counterclockwise (see arrow M), and the operation input shaft 61 also rotates - ⁇ in.
- the operation spool 71 rotates left with respect to the operation sleeve 72 and moves to the left pilot position Lp, and the pilot pressure is supplied to the first pilot port P7.
- the valve element 33 of the steering valve 32 moves to the left steering position Ls, oil is supplied to the contraction port 21b of the steering cylinder 21 and the extension port 22a of the steering cylinder 22, and the extension port 21a of the steering cylinder 21 and Oil is discharged from the contraction port 22 b of the steering cylinder 22.
- the steering angle ⁇ s gradually decreases from the rotation angle ⁇ 1.
- the input lever member 291 is pushed by the second rod member 94 as the front frame 11 rotates with respect to the rear frame 12. Rotate right.
- the position of the input lever member 291 is in a state where the straight line T1 and the straight line T2 are vertical, and the pilot valve 42 Is in the neutral position Np.
- a wheel loader 1 (an example of a work vehicle) according to the present embodiment is an articulated type in which a front frame 11 and a rear frame 12 are connected.
- the wheel loader 1 includes steering cylinders 21 and 22 (an example of a hydraulic actuator), pilot valves 42 and 242 (an example of a control valve), a joystick lever 24, and link mechanisms 90, 290, and 390 (an example of a first link mechanism). And).
- the steering cylinders 21 and 22 are driven by hydraulic pressure to change the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12.
- the pilot valves 42 and 242 control the flow rate of oil supplied to the steering cylinders 21 and 22.
- the joystick lever 24 is disposed in a cab 5 provided on the rear frame 12 and is operated by an operator.
- the link mechanisms 90, 290 and 390 are disposed below the cab 5 and transmit the operation of the joystick lever 24 to the pilot valves 42 and 242.
- link mechanisms 90, 290 and 390 are provided on the lower side of the cab 5, so that the pilot valves 42 and 242 are connected to the driver's seat 5 a. It is possible to arrange not only in the immediate vicinity but also in a position away from the driver's seat, and in a position that matches the structure of the wheel loader 1. For this reason, the freedom degree of the installation place of a valve can be raised.
- the pilot valves 42 and 242 are disposed on the front frame 11. Thereby, even if there is little space below the driver's seat 5a, the pilot valves 42 and 242 can be arranged on the front frame 11.
- the wheel loader 1 (an example of a work vehicle) according to the present embodiment further includes a steering valve 32.
- the steering valve 32 adjusts the flow rate of oil supplied to the steering cylinders 21 and 22 based on the pilot pressure input from the pilot valves 42 and 242.
- Pilot valve 42 Reference numeral 242 controls the flow rate of oil supplied from the steering valve 32 to the steering cylinders 21 and 22 by adjusting the pilot pressure.
- the freedom degree of the installation place of the pilot valves 42 and 242 which adjust pilot pressure can be raised. Further, with the above configuration, the pilot pressure is adjusted by the operation of the operator, the amount of oil supplied from the steering valve 32 to the steering cylinders 21 and 22 is controlled, and the steering angle ⁇ s of the front frame 11 with respect to the rear frame 12 is changed. .
- the pilot valve 42 is disposed on the front frame 11.
- the pilot valve 42 has a spool 51 as a valve body, and the spool 51 moves along its axial direction to control the flow rate of oil.
- a spool valve can be used as the pilot valve 42 to which the operation of the joystick lever 24 is transmitted.
- the wheel loader 1 (an example of a work vehicle) according to the present embodiment further includes a force applying unit 27.
- the force applying unit 27 includes an electric motor 111 as a drive source, and applies an assisting force or a reaction force to the operation of the joystick lever 24.
- the force required to operate the joystick lever is mainly determined by the pilot valves 42 and 242, but by applying an assisting force or a reaction force to the operation of the joystick lever 24 by the force applying unit 27, the wheel loader The operational feeling can be changed according to the state of 1.
- the operator can easily operate by applying an assisting force to the operation of the joystick lever 24.
- an assisting force For example, when a spool valve is used as the pilot valve 42, it is assumed that the operation of the joystick lever 24 is heavy because the link mechanism 90 is also interposed, but the operability is improved by applying an auxiliary force.
- the operability can be improved by applying an auxiliary force to the joystick lever 24 to reduce the force required for operating the joystick lever 24.
- the traveling stability is improved by applying a reaction force to the joystick lever 24 and increasing the force necessary to operate the joystick lever 24. Can do.
- the operator's operational feeling can be improved by appropriately changing the force required for operating the joystick lever in accordance with the traveling state of the wheel loader 1.
- the wheel loader 1 (an example of a work vehicle) according to the present embodiment further includes a connecting portion 25.
- the connecting portion 25 connects the joystick lever 24 and the link mechanisms 90, 290, and 390.
- the force applying unit 27 further includes a worm gear 112 (an example of a transmission mechanism) that transmits auxiliary force or reaction force to the connecting unit 25. Thereby, the force of the force applying portion 27 can be transmitted to the connecting portion 25 that connects the joystick lever 24 and the pilot valves 42 and 242, and the force necessary for operating the joystick lever 24 can be changed.
- the wheel loader 1 (an example of a work vehicle) according to the present embodiment further includes a torque sensor 103 and a control unit 28.
- the torque sensor 103 detects torque generated by operating the joystick lever 24.
- the control unit 28 controls the electric motor 111 based on the detection value of the torque sensor 103.
- a force can be applied according to the torque applied to the joystick lever 24 by the operator. For example, when the torque applied to the joystick lever 24 by the operator is large, the assisting force applied by the force applying unit 27 is increased, and when the torque is small, the magnitude of the applying force is controlled so as to decrease the assisting force. it can.
- the link mechanisms 90 and 390 include a first arm member 91 (an example of an arm member), a rotating member 92, a first rod member 93, and a second member.
- Rod member 94 The first arm member 91 is connected to the joystick lever 24 and rotates together with the rotation operation of the joystick lever 24.
- the rotating member 92 is disposed so as to be rotatable coaxially with the articulate center A.
- the first rod member 93 connects the first arm member 91 and the rotating member 92.
- the second rod member 94 connects the rotating member 92 and the pilot valves 42 and 424.
- the pilot valve 242 includes an operation input shaft 61 (an example of a first input member), a feedback input shaft 62 (an example of a second input member), 1 spring 64 (an example of an urging portion) and a second spring 65 (an example of an urging portion).
- the operation input shaft 61 is connected to the joystick lever 24 via the link mechanisms 290 and 390 and is displaced according to the operation amount of the joystick lever 24.
- the feedback input shaft 62 is fixed to the front frame 11.
- the first spring 64 and the second spring 65 bias the operation input shaft 61 so that the displacement amount of the operation input shaft 61 with respect to the feedback input shaft 62 becomes a neutral position Np where the displacement amount is zero.
- the pilot valve 242 is arranged at the front frame 11 or the articulate center A so that the operation input shaft 61 and the feedback input shaft 62 are along the vertical direction.
- the pilot valve 242 controls the flow rate of oil supplied to the steering cylinders 21 and 22 according to the amount of displacement of the operation input shaft 61 with respect to the feedback input shaft 62.
- the joystick lever 24 is operated against the urging force of the first spring 64 and the second spring 65.
- the pilot valve 242 which is a so-called rotary valve can be arranged in the front frame 11 or the articulate center A.
- the pilot valve 242 is set to the neutral position Np.
- the pilot valve 242 is provided with the first spring 64 and the second spring 65 as described above, and the operator operates the joystick lever 24 with an operation force that opposes the urging force of the first spring 64 and the second spring 65. To do. An assisting force or a reaction force can be applied to an operation that opposes the urging force.
- the wheel loader 1 (an example of a work vehicle) according to the present embodiment further includes a feedback link mechanism 26 (an example of a second link mechanism).
- the pilot valve 242 (an example of a control valve) includes an operation input shaft 61 (an example of a first input member), a feedback input shaft 62 (an example of a second input member), and a first spring 64 (an example of an urging portion). And a second spring 65 (an example of an urging portion).
- the operation input shaft 61 is connected to the joystick lever 24 via the link mechanism 290 and is displaced according to the operation amount of the joystick lever 24.
- the feedback input shaft 62 changes according to the steering angle ⁇ s.
- the first spring 64 and the second spring 65 urge the operation input shaft 61 so that the displacement amount of the operation input shaft 61 with respect to the feedback input shaft 62 becomes a neutral position Np where the displacement is zero.
- the feedback link mechanism 26 connects the front frame 11 and the feedback input shaft 62, and transmits a change in the steering angle ⁇ s to the feedback input shaft 62.
- the operation input shaft 61 and the feedback input shaft 62 are arranged along the vertical direction at the articulate center A, and steering is performed according to the amount of displacement of the operation input shaft 61 relative to the feedback input shaft 62.
- the flow rate of oil supplied to the cylinders 21 and 22 is controlled.
- the joystick lever 24 is operated against the urging force of the first spring 64 and the second spring 65.
- the pilot valve 242 which is a so-called rotary valve can be arranged in the front frame 11 or the articulate center A.
- pilot valve 242 is provided with the first spring 64 and the second spring 65 as described above, and the operator operates the joystick lever 24 with an operation force that opposes the urging force of the first spring 64 and the second spring 65. To do. An assisting force or a reaction force can be applied to an operation that opposes the urging force.
- the pilot valve 242 is disposed on the front frame 11, but may be disposed at the articulate center A.
- the mount bracket 468 is fixed to the front frame 11 and extends from the front frame 11 to the articulate center A.
- the housing 63 and the feedback input shaft 62 of the pilot valve 242 are fixed to the mount bracket 468.
- the pilot valve 242 is disposed on the articulate center A above the connecting shaft portion 13.
- the pilot valve 242 is arranged so that its central axis O coincides with the articulate center A.
- a link mechanism 290 according to the second embodiment is provided instead of the link mechanism 390 according to the third embodiment.
- the pilot valve 42 is fixed to the front frame 11 so that the axial direction V thereof coincides with the longitudinal direction of the vehicle body (indicated by the arrow Y in the figure). It may be inclined with respect to the longitudinal direction of the vehicle body.
- the pilot valve 42 in the first embodiment may be fixed to the front frame 11 via the mount bracket as in the second embodiment, or may be directly fixed to the front frame 11. May be.
- the pilot valve 242 of the second embodiment may be directly fixed to the front frame.
- the pilot valve 242 is installed so that the neutral position Np is set when the straight line T1 and the straight line T2 are vertical.
- the present invention is not limited to this.
- the supply amount of oil supplied from the steering valve 32 to the steering cylinders 21 and 22 is controlled according to the pilot pressure input from the pilot valve 42 which is an example of the control valve.
- the pilot valve 42 which is an example of the control valve.
- a configuration in which oil from the pilot valve 42 is directly supplied to the steering cylinders 21 and 22 may be employed.
- the two springs of the first spring 64 and the second spring 65 are provided, but the second spring 65 may not be provided.
- the feedback spool 73 and the feedback sleeve 74 may be fixed.
- the force is generated by the electric motor 111.
- the present invention is not limited to the electric motor, and may be a hydraulic motor or the like as long as it is an actuator that can generate the force to be applied.
- the force applying unit 27 and the torque sensor 103 are provided on the output shaft 84 between the universal joint unit 83 and the link mechanism 90, but the steering between the universal joint unit 83 and the joystick lever 24 is performed.
- the operation shaft 81 may be disposed.
- the wheel loader 1 is described as an example of a work vehicle.
- the wheel loader 1 is not limited to the wheel loader, and may be an articulated dump truck, a motor grader, or the like. Any work vehicle may be used.
- the work vehicle of the present invention has the effect of increasing the degree of freedom of the valve installation location, and is useful as a wheel loader or the like.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Mining & Mineral Resources (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Power Steering Mechanism (AREA)
- Operation Control Of Excavators (AREA)
- Component Parts Of Construction Machinery (AREA)
- Steering Controls (AREA)
- Mechanical Control Devices (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
ホイールローダ(1)は、フロントフレーム(11)とリアフレーム(12)が連結されたアーティキュレート式である。ホイールローダ(1)は、ステアリングシリンダ(21、22)と、パイロット弁(42)と、ジョイスティックレバー(24)と、リンク機構(90)と、を備える。ステアリングシリンダ(21、22)は、油圧によって駆動されフロントフレーム(11)のリアフレーム(12)に対するステアリング角(θs)を変更する。パイロット弁(42)は、ステアリングシリンダ(21、22)に供給される油の流量を制御する。ジョイスティックレバー(24)は、リアフレーム(12)上に設けられたキャブ(5)内に配置され、オペレータによって操作される。リンク機構(90)は、キャブ(5)の下側に配置され、ジョイスティックレバー(24)の操作をパイロット弁(42)に伝達する。
Description
本発明は、アーティキュレート式の作業車両に関する。
アーティキュレート式の作業車両として、フロントフレームとリアフレームに亘って配置された油圧アクチュエータに供給する油の流量を制御することによって、ステアリング角が変更される構成が開示されている(例えば、特許文献1、2参照。)。
特許文献1、2に示す作業車両では、オペレータがジョイスティックレバーを操作することにより、パイロット弁のポートの開閉状態が変わりパイロット圧が変更される。変更されたパイロット圧に応じてステアリング弁から油圧アクチュエータに供給される流量が調整されて、作業車両のステアリング角が変更される。
特許文献1、2に示す作業車両では、オペレータがジョイスティックレバーを操作することにより、パイロット弁のポートの開閉状態が変わりパイロット圧が変更される。変更されたパイロット圧に応じてステアリング弁から油圧アクチュエータに供給される流量が調整されて、作業車両のステアリング角が変更される。
ここで、ジョイスティックレバーは、作業車両のリアフレーム上に設けられた運転席の側方に配置されている。また、パイロット弁は、ジョイスティックレバーの操作を簡易な構成で伝達するために、運転席の下方であってジョイスティックレバーの直下近傍に配置されている。
しかしながら、小型の作業車両の場合には、運転席の下方に場積が少なく特許文献1、2のように座席の下方にパイロット弁を配置することが出来なかった。
本発明は、上記従来の作業車両の課題を考慮し、弁の設置場所の自由度をあげることが可能な作業車両を提供することを目的とする。
(課題を解決するための手段)
上記目的を達成するために、第1の発明に係る作業車両は、フロントフレームとリアフレームが連結されたアーティキュレート式の作業車両であって、油圧アクチュエータと、制御弁と、ジョイスティックレバーと、第1リンク機構と、を備える。油圧アクチュエータは、油圧によって駆動されフロントフレームのリアフレームに対するステアリング角を変更する。制御弁は、油圧アクチュエータに供給される油の流量を制御する。ジョイスティックレバーは、リアフレーム上に設けられたキャブ内に配置され、オペレータによって操作される。第1リンク機構は、キャブの下側に配置され、ジョイスティックレバーの操作を制御弁に伝達する。
本発明は、上記従来の作業車両の課題を考慮し、弁の設置場所の自由度をあげることが可能な作業車両を提供することを目的とする。
(課題を解決するための手段)
上記目的を達成するために、第1の発明に係る作業車両は、フロントフレームとリアフレームが連結されたアーティキュレート式の作業車両であって、油圧アクチュエータと、制御弁と、ジョイスティックレバーと、第1リンク機構と、を備える。油圧アクチュエータは、油圧によって駆動されフロントフレームのリアフレームに対するステアリング角を変更する。制御弁は、油圧アクチュエータに供給される油の流量を制御する。ジョイスティックレバーは、リアフレーム上に設けられたキャブ内に配置され、オペレータによって操作される。第1リンク機構は、キャブの下側に配置され、ジョイスティックレバーの操作を制御弁に伝達する。
ここで、ジョイスティックレバーの操作を制御弁に伝達するために、キャブの下側に第1リンク機構が設けられているので、制御弁を運転席の直下近傍に限らず、運転席から離れた位置に配置することが可能となり、作業車両の構造に合わせた位置に配置することが出来る。このため、弁の設置場所の自由度をあげることが出来る。
第2の発明に係る作業車両は、第1の発明に係る作業車両であって、制御弁は、フロントフレームに配置されている。
これにより、運転席の下方に場積が少ない場合であっても、フロントフレームに制御弁を配置することが出来る。
これにより、運転席の下方に場積が少ない場合であっても、フロントフレームに制御弁を配置することが出来る。
第3の発明に係る作業車両は、第1の発明に係る作業車両であって、ステアリング弁を更に備える。ステアリング弁は、制御弁から入力されるパイロット圧に基づいて油圧アクチュエータに供給される油の流量を調整する。制御弁は、パイロット圧を調整することにより、ステアリング弁から油圧アクチュエータに供給される油の流量を制御する。
これにより、パイロット圧を調整する制御弁の設置場所の自由度をあげることが出来る。
また、上記構成により、オペレータの操作によってパイロット圧を調整し、ステアリング弁から油圧アクチュエータへの油の供給量が制御され、フロントフレームのリアフレームに対するステアリング角が変更される。
これにより、パイロット圧を調整する制御弁の設置場所の自由度をあげることが出来る。
また、上記構成により、オペレータの操作によってパイロット圧を調整し、ステアリング弁から油圧アクチュエータへの油の供給量が制御され、フロントフレームのリアフレームに対するステアリング角が変更される。
第4の発明に係る作業車両は、第1の発明に係る作業車両であって、制御弁は、フロントフレームに配置されている。制御弁は、弁体としてスプールを有し、スプールが、その軸方向に沿って移動することにより、油の流量を制御する。
水平方向に配置された第1リンク機構を有することにより、ジョイスティックレバーの操作をフロントフレームまで伝達することができる。このため、ジョイスティックレバーの操作が伝達される制御弁としてスプール弁を用いることができる。
水平方向に配置された第1リンク機構を有することにより、ジョイスティックレバーの操作をフロントフレームまで伝達することができる。このため、ジョイスティックレバーの操作が伝達される制御弁としてスプール弁を用いることができる。
第5の発明に係る作業車両は、第1の発明に係る作業車両であって、力付与部を更に備える。力付与部は、駆動源として電動モータを有し、ジョイスティックレバーの操作に対して補助力または反力を付与する。
ここで、ジョイスティックレバーの操作に必要な力は、主に制御弁によって決まるが、力付与部によってジョイスティックレバーの操作に対して補助力または反力を付与することにより、作業車両の状態に合わせて操作感を変更できる。
ここで、ジョイスティックレバーの操作に必要な力は、主に制御弁によって決まるが、力付与部によってジョイスティックレバーの操作に対して補助力または反力を付与することにより、作業車両の状態に合わせて操作感を変更できる。
ジョイスティックレバーを操作して制御弁を操作する際に、ジョイスティックレバーの操作に対して補助力を付与することによって、オペレータは容易に操作することができる。例えば、制御弁としてスプール弁を用いた場合、第1リンク機構も介しているため、ジョイスティックレバーの操作が重くなることが想定されるが、補助力を付与することによって操作性が向上する。
なお、例えば、作業車両を低速で動かす場合には、ジョイスティックレバーに補助力を付与してジョイスティックレバーの操作に必要な力を小さくすることによって、操作性を向上することができる。一方、作業車両の走行速度が低速から高速に変更した場合には、ジョイスティックレバーに反力を付与しジョイスティックレバーの操作に必要な力を大きくすることによって、走行安定性を向上することができる。
このように、作業車両の走行状態に合わせてジョイスティックレバーの操作に必要な力を適宜変更することより、オペレータの操作感を改善できる。
このように、作業車両の走行状態に合わせてジョイスティックレバーの操作に必要な力を適宜変更することより、オペレータの操作感を改善できる。
第6の発明に係る作業車両は、第5の発明に係る作業車両であって、連結部を更に備える。連結部は、ジョイスティックレバーと第1リンク機構を連結する。力付与部は、連結部に補助力または反力を伝達する伝達機構を更に有する。
これにより、ジョイスティックレバーと制御弁を連結する連結部に力付与部の力を伝達でき、ジョイスティックレバーの操作に必要な力を変更できる。
これにより、ジョイスティックレバーと制御弁を連結する連結部に力付与部の力を伝達でき、ジョイスティックレバーの操作に必要な力を変更できる。
第7の発明に係る作業車両は、第5の発明に係る作業車両であって、トルクセンサと、制御部と、を更に備える。トルクセンサは、ジョイスティックレバーの操作によって生じるトルクを検出する。制御部は、トルクセンサの検出値に基づいて、電動モータを制御する。
これにより、オペレータがジョイスティックレバーに加えたトルクに応じて力を付与できる。例えば、オペレータがジョイスティックレバーに加えたトルクが大きいときには、力付与部によって付与する補助力を大きくし、トルクが小さいときには補助力を小さくするように付与する力の大きさを制御することができる。
これにより、オペレータがジョイスティックレバーに加えたトルクに応じて力を付与できる。例えば、オペレータがジョイスティックレバーに加えたトルクが大きいときには、力付与部によって付与する補助力を大きくし、トルクが小さいときには補助力を小さくするように付与する力の大きさを制御することができる。
第8の発明に係る作業車両は、第5の発明に係る作業車両であって、第1リンク機構は、アーム部材と、回転部材と、第1ロッド部材と、第2ロッド部材とを有する。アーム部材は、ジョイスティックレバーに連結されジョイスティックレバーの回転操作とともに回転する。回転部材は、アーティキュレート中心と同軸上に回転可能に配置されている。第1ロッド部材は、アーム部材と回転部材とを連結する。第2ロッド部材は、回転部材と前記制御弁を連結する。
このような第1リンク機構により、リアフレームに設けられているジョイスティックレバーの操作をフロントフレームに配置されている制御弁まで伝達することが出来る。
このような第1リンク機構により、リアフレームに設けられているジョイスティックレバーの操作をフロントフレームに配置されている制御弁まで伝達することが出来る。
第9の発明に係る作業車両は、第1の発明に係る作業車両であって、制御弁は、第1入力部材と、第2入力部材と、付勢部と、を有する。第1入力部材は、第1リンク機構を介してジョイスティックレバーに連結されジョイスティックレバーの操作量に応じて変位する。第2入力部材は、フロントフレームに固定されている。付勢部は、第1入力部材の第2入力部材に対する変位量がゼロである中立位置になるように第1入力部材を付勢する。制御弁は、フロントフレームまたはアーティキュレート中心に、第1入力部材と第2入力部材が鉛直方向に沿うように配置されている。制御弁は、第2入力部材の変位量に対する第1入力部材の変位量の差に応じて、油圧アクチュエータに供給される油の流量を制御する。ジョイスティックレバーは、付勢部による付勢力に対抗して操作される。
これにより、運転席の下方に場積が少ない場合であっても、いわゆるロータリー弁である制御弁をフロントフレームまたはアーティキュレート中心に配置することができる。
また、上記構成により、ジョイスティックレバーを操作した後、ジョイスティックレバーに追従してステアリング角が変更し、ジョイスティックレバーの操作量とステアリング角が一致すると制御弁は中立位置となる。
また、このように制御弁には付勢部が設けられており、オペレータは付勢部による付勢力に対抗する操作力でジョイスティックレバーを操作する。この付勢力に対抗する操作に対して補助力または反力を付与することができる。
また、上記構成により、ジョイスティックレバーを操作した後、ジョイスティックレバーに追従してステアリング角が変更し、ジョイスティックレバーの操作量とステアリング角が一致すると制御弁は中立位置となる。
また、このように制御弁には付勢部が設けられており、オペレータは付勢部による付勢力に対抗する操作力でジョイスティックレバーを操作する。この付勢力に対抗する操作に対して補助力または反力を付与することができる。
第10の発明に係る作業車両は、第1の発明に係る作業車両であって、第2リンク機構を更に備える。制御弁は、第1入力部材と、第2入力部材と、付勢部とを有する。第1入力部材は、第1リンク機構を介してジョイスティックレバーに連結されジョイスティックレバーの操作量に応じて変位する。第2入力部材は、ステアリング角に応じて変化する。付勢部は、第1入力部材の第2入力部材に対する変位量がゼロである中立位置になるように第1入力部材を付勢する。第2リンク機構は、フロントフレームと第2入力部材とを連結し、ステアリング角の変化を第2入力部材に伝達する。制御弁は、アーティキュレート中心に、第1入力部材と第2入力部材が、鉛直方向に沿うように配置されており、第2入力部材に対する第1入力部材の変位量に応じて、油圧アクチュエータに供給される油の流量を制御する。ジョイスティックレバーは、付勢部による付勢力に対抗して操作される。
これにより、運転席の下方に場積が少ない場合であっても、いわゆるロータリー弁である制御弁をアーティキュレート中心に配置することができる。
また、上記構成により、ジョイスティックレバーを操作した後、ジョイスティックレバーに追従してステアリング角が変更し、ジョイスティックレバーの操作量とステアリング角が一致すると制御弁は中立位置となる。
(発明の効果)
本発明によれば、弁の設置場所の自由度をあげることが可能な作業車両を提供することができる。
また、上記構成により、ジョイスティックレバーを操作した後、ジョイスティックレバーに追従してステアリング角が変更し、ジョイスティックレバーの操作量とステアリング角が一致すると制御弁は中立位置となる。
(発明の効果)
本発明によれば、弁の設置場所の自由度をあげることが可能な作業車両を提供することができる。
本発明にかかる実施の形態のホイールローダについて図面を参照しながら以下に説明する。
(実施の形態1)
<1.構成>
(1-1.ホイールローダの構成の概要)
図1は、本実施の形態のホイールローダ1の構成を示す模式図である。本実施の形態のホイールローダ1は、車体フレーム2と、作業機3と、一対のフロントタイヤ4、キャブ5、エンジンルーム6、一対のリアタイヤ7、およびステアリング操作装置8と、を備えている。
(実施の形態1)
<1.構成>
(1-1.ホイールローダの構成の概要)
図1は、本実施の形態のホイールローダ1の構成を示す模式図である。本実施の形態のホイールローダ1は、車体フレーム2と、作業機3と、一対のフロントタイヤ4、キャブ5、エンジンルーム6、一対のリアタイヤ7、およびステアリング操作装置8と、を備えている。
ホイールローダ1は、作業機3を用いて土砂積み込み作業などを行う。
車体フレーム2は、いわゆるアーティキュレート式であり、フロントフレーム11とリアフレーム12と、連結軸部13と、を有している。フロントフレーム11は、リアフレーム12の前方に配置されている。一対のフロントタイヤ4は、フロントフレーム11の左右に取り付けられている。また、一対のリアタイヤ7は、リアフレーム12の左右に取り付けられている。
車体フレーム2は、いわゆるアーティキュレート式であり、フロントフレーム11とリアフレーム12と、連結軸部13と、を有している。フロントフレーム11は、リアフレーム12の前方に配置されている。一対のフロントタイヤ4は、フロントフレーム11の左右に取り付けられている。また、一対のリアタイヤ7は、リアフレーム12の左右に取り付けられている。
連結軸部13は、車幅方向の中央に設けられており、フロントフレーム11とリアフレーム12を互いに揺動可能に連結する。図2は、キャブ5および連結軸部13近傍の拡大図である。
図2に示すように、連結軸部13は、上下一対のフロントブラケット131と、上下一対のリアブラケット132と、上下に配置された2つのセンタピン133とを有する。各々のフロントブラケット131は、フロントフレーム11に固定されており、フロントフレーム11の後部からリアフレーム12に向かって水平に突出するように設けられている。各々のリアブラケット132は、フロントブラケット131の上下に配置された一対の部材132aを有している。リアブラケット132の一対のブラケット部材132aは、リアブラケット132の前部からフロントフレーム11に向かって水平に突出するように設けられている。センタピン133は、鉛直方向に沿って配置され、一対のブラケット部材132aと、その間に配置されたフロントブラケット131とを互いに回転可能に連結する。図2に示すように、フロントブラケット131と、リアブラケット132と、センタピン133の組が、上下に配置されている。
図2に示すように、連結軸部13は、上下一対のフロントブラケット131と、上下一対のリアブラケット132と、上下に配置された2つのセンタピン133とを有する。各々のフロントブラケット131は、フロントフレーム11に固定されており、フロントフレーム11の後部からリアフレーム12に向かって水平に突出するように設けられている。各々のリアブラケット132は、フロントブラケット131の上下に配置された一対の部材132aを有している。リアブラケット132の一対のブラケット部材132aは、リアブラケット132の前部からフロントフレーム11に向かって水平に突出するように設けられている。センタピン133は、鉛直方向に沿って配置され、一対のブラケット部材132aと、その間に配置されたフロントブラケット131とを互いに回転可能に連結する。図2に示すように、フロントブラケット131と、リアブラケット132と、センタピン133の組が、上下に配置されている。
作業機3は、図示しない作業機ポンプからの作動油によって駆動される。作業機3は、図1に示すように、ブーム14と、バケット15と、リフトシリンダ16と、バケットシリンダ17と、を有する。ブーム14は、フロントフレーム11に装着されている。バケット15は、ブーム14の先端に取り付けられている。
リフトシリンダ16およびバケットシリンダ17は、油圧シリンダである。リフトシリンダ16の一端はフロントフレーム11に取り付けられており、リフトシリンダ16の他端はブーム14に取り付けられている。リフトシリンダ16の伸縮により、ブーム14が上下に揺動する。バケットシリンダ17の一端はフロントフレーム11に取り付けられており、バケットシリンダ17の他端はベルクランク18を介してバケット15に取り付けられている。バケットシリンダ17が伸縮することによって、バケット15が上下に揺動する。
リフトシリンダ16およびバケットシリンダ17は、油圧シリンダである。リフトシリンダ16の一端はフロントフレーム11に取り付けられており、リフトシリンダ16の他端はブーム14に取り付けられている。リフトシリンダ16の伸縮により、ブーム14が上下に揺動する。バケットシリンダ17の一端はフロントフレーム11に取り付けられており、バケットシリンダ17の他端はベルクランク18を介してバケット15に取り付けられている。バケットシリンダ17が伸縮することによって、バケット15が上下に揺動する。
キャブ5は、リアフレーム12上に載置されており、内部には、ステアリング操作のためのハンドルやジョイスティックレバー24(図2参照)、作業機3を操作するためのレバー、各種の表示装置等が配置されている。エンジンルーム6は、キャブ5の後側であってリアフレーム12上に配置されており、エンジンが収納されている。
ステアリング操作装置8は、詳しくは後述するが、ステアリングシリンダ21、22を有しており、ステアリングシリンダ21、22に供給する油の流量を変更することによって、フロントフレーム11のリアフレーム12に対するステアリング角を変更し、ホイールローダ1の進行方向を変更する。
ステアリング操作装置8は、詳しくは後述するが、ステアリングシリンダ21、22を有しており、ステアリングシリンダ21、22に供給する油の流量を変更することによって、フロントフレーム11のリアフレーム12に対するステアリング角を変更し、ホイールローダ1の進行方向を変更する。
(1-2.ステアリング操作装置)
図3は、ステアリング操作装置8の構成を示す油圧回路図である。本実施の形態のステアリング操作装置8は、一対のステアリングシリンダ21,22と、ステアリング油圧回路23と、ジョイスティックレバー24と、連結部25と、リンク機構90と、力付与部27と、制御部28と、を主に有する。
図3は、ステアリング操作装置8の構成を示す油圧回路図である。本実施の形態のステアリング操作装置8は、一対のステアリングシリンダ21,22と、ステアリング油圧回路23と、ジョイスティックレバー24と、連結部25と、リンク機構90と、力付与部27と、制御部28と、を主に有する。
(1-2-1.ステアリングシリンダ)
一対のステアリングシリンダ21、22は、油圧によって駆動される。一対のステアリングシリンダ21、22は、連結軸部13を挟んで車幅方向の左右側に並んで配置されている。ステアリングシリンダ21は、連結軸部13の左側に配置されている(図1参照)。ステアリングシリンダ22は、連結軸部13の右側に配置されている。ステアリングシリンダ21、22は、それぞれの一端がフロントフレーム11に取り付けられており、それぞれの他端が、リアフレーム12に取り付けられている。
一対のステアリングシリンダ21、22は、油圧によって駆動される。一対のステアリングシリンダ21、22は、連結軸部13を挟んで車幅方向の左右側に並んで配置されている。ステアリングシリンダ21は、連結軸部13の左側に配置されている(図1参照)。ステアリングシリンダ22は、連結軸部13の右側に配置されている。ステアリングシリンダ21、22は、それぞれの一端がフロントフレーム11に取り付けられており、それぞれの他端が、リアフレーム12に取り付けられている。
ステアリングシリンダ21には、伸長ポート21aと収縮ポート21bが設けられており、ステアリングシリンダ22には、伸長ポート22aと収縮ポート22bが設けられている。
ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給され、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出されると、ステアリングシリンダ21が伸長し、ステアリングシリンダ22が収縮する。これによってステアリング角θsが変化し車両は右に曲がる。また、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給され、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出されると、ステアリングシリンダ21が収縮し、ステアリングシリンダ22が伸長する。これによってステアリング角θsが変化し車両は左に曲がる。
ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給され、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出されると、ステアリングシリンダ21が伸長し、ステアリングシリンダ22が収縮する。これによってステアリング角θsが変化し車両は右に曲がる。また、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給され、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出されると、ステアリングシリンダ21が収縮し、ステアリングシリンダ22が伸長する。これによってステアリング角θsが変化し車両は左に曲がる。
なお、ステアリングシリンダ21、22の間に配置されている連結軸部13の近傍には、ステアリング角θsを検出するステアリング角検出部104が設けられている。ステアリング角検出部104は、例えばポテンショメータによって構成されており、検出されたステアリング角θsは検出信号として制御部28に送られる。
また、ステアリングシリンダ21には、シリンダのストロークを検出するシリンダストロークセンサ106が設けられており、ステアリングシリンダ22には、シリンダのストロークを検出するシリンダストロークセンサ107が設けられている。これらシリンダストロークセンサ106、107の検出値が制御部28に送られ、ステアリング角θsが検出されてもよい。
また、ステアリングシリンダ21には、シリンダのストロークを検出するシリンダストロークセンサ106が設けられており、ステアリングシリンダ22には、シリンダのストロークを検出するシリンダストロークセンサ107が設けられている。これらシリンダストロークセンサ106、107の検出値が制御部28に送られ、ステアリング角θsが検出されてもよい。
(1-2-2.ステアリング油圧回路)
ステアリング油圧回路23は、ステアリングシリンダ21、22に供給する油の流量を調整するための油圧回路である。ステアリング油圧回路23は、メイン油圧回路30と、パイロット油圧回路40と、を有する。
(a)メイン油圧経路
メイン油圧回路30は、メイン油圧源31からの油をステアリングシリンダ21、22に供給する回路であり、ステアリング弁32を有している。メイン油圧源31は、油圧ポンプおよびリリーフ弁等から構成される。
ステアリング油圧回路23は、ステアリングシリンダ21、22に供給する油の流量を調整するための油圧回路である。ステアリング油圧回路23は、メイン油圧回路30と、パイロット油圧回路40と、を有する。
(a)メイン油圧経路
メイン油圧回路30は、メイン油圧源31からの油をステアリングシリンダ21、22に供給する回路であり、ステアリング弁32を有している。メイン油圧源31は、油圧ポンプおよびリリーフ弁等から構成される。
ステアリング弁32は、スプール式の弁であって、入力されるパイロット圧に応じてステアリングシリンダ21、22に供給される油の流量を調整する流量調整弁である。ステアリング弁32は、メインポンプポートP1、メインドレインポートP2、第1ステアリングポートP3、および第2ステアリングポートP4を有している。メインポンプポートP1は、メイン油圧管路36を介してメイン油圧源31と接続されている。メインドレインポートP2は、メインドレイン管路37を介して油を回収するドレンタンクDTに接続されている。第1ステアリングポートP3は、第1ステアリング管路38を介して、ステアリングシリンダ21の収縮ポート21bとステアリングシリンダ22の伸長ポート22aに接続されている。第2ステアリングポートP4は、第2ステアリング管路39を介して、ステアリングシリンダ21の伸長ポート21aとステアリングシリンダ22の収縮ポート22bに接続されている。
ステアリング弁32は、中立位置Ns、左ステアリング位置Ls、右ステアリング位置Rsに移動可能なスプールである弁体33を有している。弁体33が中立位置Nsに配置されている場合は、メインポンプポートP1とメインドレインポートP2が連通する。この場合、第1ステアリングポートP3と第2ステアリングポートP4は、それぞれいずれのポートとも連通していない。弁体33が、左ステアリング位置Lsに配置されている場合は、メインポンプポートP1と第1ステアリングポートP3が連通し、メインドレインポートP2と第2ステアリングポートP4が連通する。弁体33が右ステアリング位置Rsに配置されている場合は、メインポンプポートP1と第2ステアリングポートP4が連通し、メインドレインポートP2と第1ステアリングポートP3が連通する。
ステアリング弁32は、第1パイロット室34と第2パイロット室35とを有する。第1パイロット室34並びに第2パイロット室35にパイロット圧が供給されていない場合および第1パイロット室34並びに第2パイロット室35に同じパイロット圧が供給されている状態では、弁体33は中立位置Nsに位置する。第1パイロット室34のみにパイロット圧が供給されている状態では、弁体33は左ステアリング位置Lsに位置する。第2パイロット室35のみにパイロット圧が供給されている状態では、弁体33が右ステアリング位置Rsに位置する。弁体33が左ステアリング位置Lsおよび右ステアリング位置Rsに位置している場合には、ステアリング弁32は、供給されるパイロット圧に応じてメイン油圧源31からの油が通行する開口面積を変化させる。これにより、ステアリング弁32は、パイロット圧に応じてステアリングシリンダ21またはステアリングシリンダ22に供給する油の流量を制御する。
(b)パイロット油圧回路
パイロット油圧回路40は、パイロット油圧源43からの油をステアリング弁32の第1パイロット室34と第2パイロット室35に供給するための回路である。
パイロット油圧回路40は、可変減圧部41と、パイロット弁42とを有する。
(i)可変減圧部
可変減圧部41は、パイロット油圧源43からパイロット弁42に送られる油圧を減圧して調整する。可変減圧部41は、電磁式減圧弁を内蔵し、制御部28からの指令信号を受けて油圧の制御を行う。
(ii)パイロット弁
パイロット弁42は、パイロット油圧源43からステアリング弁32に入力されるパイロット圧を調整するスプール式の弁である。
パイロット油圧回路40は、パイロット油圧源43からの油をステアリング弁32の第1パイロット室34と第2パイロット室35に供給するための回路である。
パイロット油圧回路40は、可変減圧部41と、パイロット弁42とを有する。
(i)可変減圧部
可変減圧部41は、パイロット油圧源43からパイロット弁42に送られる油圧を減圧して調整する。可変減圧部41は、電磁式減圧弁を内蔵し、制御部28からの指令信号を受けて油圧の制御を行う。
(ii)パイロット弁
パイロット弁42は、パイロット油圧源43からステアリング弁32に入力されるパイロット圧を調整するスプール式の弁である。
(パイロット弁の構成概要)
スプール式のパイロット弁42は、筒状のスリーブ50と、スリーブ50の内側を軸方向に沿って移動可能なスプール51と、付勢バネ52と、を有する。スリーブ50は、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、第2パイロットポートP8を有する。パイロットポンプポートP5は、パイロット油圧管路44を介して可変減圧部41と繋がっており、可変減圧部41がパイロット油圧源43に繋がっている。パイロットドレンポートP6は、パイロットドレン管路45を介して油を回収するドレンタンクDTに接続されている。第1パイロットポートP7は、第1パイロット管路46を介して、ステアリング弁32の第1パイロット室34に接続されている。第2パイロットポートP8は、第2パイロット管路47を介して、ステアリング弁32の第2パイロット室35に接続されている。
スプール式のパイロット弁42は、筒状のスリーブ50と、スリーブ50の内側を軸方向に沿って移動可能なスプール51と、付勢バネ52と、を有する。スリーブ50は、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、第2パイロットポートP8を有する。パイロットポンプポートP5は、パイロット油圧管路44を介して可変減圧部41と繋がっており、可変減圧部41がパイロット油圧源43に繋がっている。パイロットドレンポートP6は、パイロットドレン管路45を介して油を回収するドレンタンクDTに接続されている。第1パイロットポートP7は、第1パイロット管路46を介して、ステアリング弁32の第1パイロット室34に接続されている。第2パイロットポートP8は、第2パイロット管路47を介して、ステアリング弁32の第2パイロット室35に接続されている。
スプール51は、スリーブ50内において中立位置Np、左パイロット位置Lp、および右パイロット位置Rpに移動可能である。
付勢バネ52は、スプール51がスリーブ50に対して中立位置Npに位置するようにスプール51を付勢する。
スプール51がスリーブ50に対して中立位置Npにある場合は、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、および第2パイロットポートP8がそれぞれ連通する。スプール51がスリーブ50に対して左パイロット位置Lpに配置されている場合には、パイロットポンプポートP5と第1パイロットポートP7が連通し、パイロットドレンポートP6と第2パイロットポートP8が連通する。また、スプール51がスリーブ50に対して右パイロット位置Rpに配置されている場合には、パイロットポンプポートP5と第2パイロットポートP8が連通し、パイロットドレンポートP6と第1パイロットポートP7が連通する。
また、パイロット弁42には、スプール51の位置を検出するスプール位置検出センサ108が設けられている。スプール位置検出センサ108の検出値は制御部28へと送信される。
付勢バネ52は、スプール51がスリーブ50に対して中立位置Npに位置するようにスプール51を付勢する。
スプール51がスリーブ50に対して中立位置Npにある場合は、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、および第2パイロットポートP8がそれぞれ連通する。スプール51がスリーブ50に対して左パイロット位置Lpに配置されている場合には、パイロットポンプポートP5と第1パイロットポートP7が連通し、パイロットドレンポートP6と第2パイロットポートP8が連通する。また、スプール51がスリーブ50に対して右パイロット位置Rpに配置されている場合には、パイロットポンプポートP5と第2パイロットポートP8が連通し、パイロットドレンポートP6と第1パイロットポートP7が連通する。
また、パイロット弁42には、スプール51の位置を検出するスプール位置検出センサ108が設けられている。スプール位置検出センサ108の検出値は制御部28へと送信される。
(1-2-3.ジョイスティックレバー、連結部)
図4には、キャブ5内の構成が示されている。キャブ5内には、オペレータが着座する運転席5aが設けられている。運転席5aの車幅方向左側にはステアリングボックス80が配置されている。
図4には、キャブ5内の構成が示されている。キャブ5内には、オペレータが着座する運転席5aが設けられている。運転席5aの車幅方向左側にはステアリングボックス80が配置されている。
ジョイスティックレバー24は、ステアリングボックス80から前に向かって斜め上方に突出して配置されている。
連結部25は、ジョイスティックレバー24と後述するリンク機構90とを連結する。連結部25は、ステアリング操作軸81と、連結バー82と、ユニバーサルジョイント部83と、出力軸84と、を主に有している。
連結部25は、ジョイスティックレバー24と後述するリンク機構90とを連結する。連結部25は、ステアリング操作軸81と、連結バー82と、ユニバーサルジョイント部83と、出力軸84と、を主に有している。
ステアリング操作軸81は、鉛直方向に配置されており、その中心軸Qを中心に回転可能にステアリングボックス80に支持されている。連結バー82は、ステアリングボックス80内に配置されており、ジョイスティックレバー24とステアリング操作軸81を連結している。
ユニバーサルジョイント部83は、ステアリング操作軸81と、運転席5aの近傍に配置されている出力軸84とを連結している。ユニバーサルジョイント部83は、伸縮自在な中央部83aと、中央部83aの両端に配置されたジョイント部83b、83cを有している。ジョイント部83bは、ステアリング操作軸81に連結されている。ジョイント部83cは、出力軸84に連結されている。
ユニバーサルジョイント部83は、ステアリング操作軸81と、運転席5aの近傍に配置されている出力軸84とを連結している。ユニバーサルジョイント部83は、伸縮自在な中央部83aと、中央部83aの両端に配置されたジョイント部83b、83cを有している。ジョイント部83bは、ステアリング操作軸81に連結されている。ジョイント部83cは、出力軸84に連結されている。
出力軸84は、連結バー82およびユニバーサルジョイント部83を介して伝達されてきたジョイスティックレバー24の操作をリンク機構90に出力する。出力軸84は、キャブ5の床面5bの下側まで延びている。詳細には、出力軸84は、レバー側軸部84aと、トルク入力軸部84bと、リンク側軸部84cが順に繋がって構成されている(後述の図6参照)。すなわち、レバー側軸部84aの一端は連結バー82に連結されており、レバー側軸部84aの他端はトルク入力軸部84bの一端に繋がっている。また、トルク入力軸部84bの他端は、リンク側軸部84cの一端に繋がっており、リンク側軸部84cの他端は、ユニバーサルジョイント部83に繋がっている。トルク入力軸部84bには、後述する力付与部27からの補助力または反力が入力される。
図5は、ジョイスティックレバー24近傍を上方から視た平面図である。図5に示すように、ジョイスティックレバー24は、ステアリングボックス80の上面に形成された円弧状の孔85から斜め上方に突出して形成されている。ジョイスティックレバー24は、ステアリング操作軸81(詳細には中心軸Q)を中心にして水平方向に旋回可能となっている。また、ステアリングボックス80の孔85の右端の縁にはRマークが形成されており、左端の縁にはLマークが形成されている。
例えば、図5に示すように、オペレータがジョイスティックレバー24を中央位置から右側に回転角θin回転操作すると、ステアリング操作軸81も回転角θin右回転する。このステアリング操作軸81の回転角θinの回転が、ユニバーサルジョイント部83を介して、後述のリンク機構90に伝達されて、パイロット弁42のスプール51が右パイロット位置Rpに移動し、右方向へのアーティキュレート動作が開始される。ジョイスティックレバー24を左回転させたときも同様である。なお、ジョイスティックレバー24の回転角θinは、例えばロータリセンサによって構成された第1回転角検出部101によって検出される。
なお、オペレータは、力付与部27によって補助力または反力が入力されない場合には、パイロット弁42の付勢バネ52に対抗してジョイスティックレバー24を操作する必要がある。
(1-2-4.力付与部)
図6は、力付与部27を示す斜視図である。
力付与部27は、ジョイスティックレバー24の操作に対して補助力または反力を付与する。力付与部27は、電動モータ111と、ウォームギア112と、を有する。ウォームギア112は、円筒ウォーム112aとウォームホイール112bを持つ。ウォームホイール112bは、上述したトルク入力軸部84bの周囲に設けられており、円筒ウォーム112aと噛み合っている。電動モータ111の出力軸は、円筒ウォーム112aに接続されており、円筒ウォーム112aを、その中心軸周りに回転させる。電動モータ111は、制御部28に設けられている駆動回路204からの指令に基づいて駆動する。
図6は、力付与部27を示す斜視図である。
力付与部27は、ジョイスティックレバー24の操作に対して補助力または反力を付与する。力付与部27は、電動モータ111と、ウォームギア112と、を有する。ウォームギア112は、円筒ウォーム112aとウォームホイール112bを持つ。ウォームホイール112bは、上述したトルク入力軸部84bの周囲に設けられており、円筒ウォーム112aと噛み合っている。電動モータ111の出力軸は、円筒ウォーム112aに接続されており、円筒ウォーム112aを、その中心軸周りに回転させる。電動モータ111は、制御部28に設けられている駆動回路204からの指令に基づいて駆動する。
なお、トルク入力軸部84bの第1端84b1がレバー側軸部84aと繋がっており、第2端84b2がリンク側軸部84cと繋がっている。
電動モータ111が駆動されると、円筒ウォーム112aが回転し、その回転によってウォームホイール112bが回転し、ウォームホイール112bと固定されているトルク入力軸部84bにも回転力が生じる。円筒ウォーム112aの回転方向を変えることによって、トルク入力軸部84bに左回転および右回転のいずれの方向にも回転力を加えることができる。
電動モータ111が駆動されると、円筒ウォーム112aが回転し、その回転によってウォームホイール112bが回転し、ウォームホイール112bと固定されているトルク入力軸部84bにも回転力が生じる。円筒ウォーム112aの回転方向を変えることによって、トルク入力軸部84bに左回転および右回転のいずれの方向にも回転力を加えることができる。
例えば、ジョイスティックレバー24を右回転させる際に、トルク入力軸部84bに右回転方向に力を加えることによって、ジョイスティックレバー24の操作に対して補助力を付与することになる。また、ジョイスティックレバー24を右回転させる際に、トルク入力軸部84bに左回転方向に力を加えることによって、ジョイスティックレバー24の操作に対して反力を付与することなる。
なお、トルク入力軸部84bには、トルクセンサ103が設けられている。トルクセンサ103は、オペレータがジョイスティックレバー24に力を加えることによってトルク入力軸部84bに生じるトルクを検出する。本実施の形態のトルクセンサ103は、例えば、トーションバーのねじれをコイルによって検出することにより、トルク入力軸部84bの回転方向とトルク入力軸部84bに生じるトルクを検出する。検出された回転方向およびトルクTは、操舵トルク信号として制御部28へ出力される。
(1-2-5.リンク機構)
リンク機構90は、ジョイスティックレバー24による回転方向への操作を、平面視においてジョイスティックレバー24から所定距離離れた回転部材92に伝えた後、直線方向への操作に変換してパイロット弁42に伝達する。リンク機構90は、図2に示すように、キャブ5の下側に配置されており、ジョイスティックレバー24に連結されている連結部25と、パイロット弁42との間を連結するように水平方向に沿って形成されている。図7は、リンク機構90の構成を説明するための平面模式図である。図7に示すように、リンク機構90は、第1アーム部材91と、回転部材92と、第1ロッド部材93と、第2ロッド部材94と、を有する。
リンク機構90は、ジョイスティックレバー24による回転方向への操作を、平面視においてジョイスティックレバー24から所定距離離れた回転部材92に伝えた後、直線方向への操作に変換してパイロット弁42に伝達する。リンク機構90は、図2に示すように、キャブ5の下側に配置されており、ジョイスティックレバー24に連結されている連結部25と、パイロット弁42との間を連結するように水平方向に沿って形成されている。図7は、リンク機構90の構成を説明するための平面模式図である。図7に示すように、リンク機構90は、第1アーム部材91と、回転部材92と、第1ロッド部材93と、第2ロッド部材94と、を有する。
第1アーム部材91は、図4および図7に示すように、出力軸84の下端に固定されている。アーム部材91は、出力軸84の下端から水平方向に沿って配置されている。
回転部材92は、連結軸部13に配置された支持軸95に回転可能に支持されている。支持軸95は、その軸方向がアーティキュレート中心Aに沿うように配置されており、リアブラケット132のブラケット部材132aに固定されている。すなわち、支持軸95は、リアフレーム12に固定されているため、アーティキュレート動作が行われてもフロントフレーム11とともには回転しない。
回転部材92は、連結軸部13に配置された支持軸95に回転可能に支持されている。支持軸95は、その軸方向がアーティキュレート中心Aに沿うように配置されており、リアブラケット132のブラケット部材132aに固定されている。すなわち、支持軸95は、リアフレーム12に固定されているため、アーティキュレート動作が行われてもフロントフレーム11とともには回転しない。
詳細には、回転部材92は、図7に示すように、第2アーム部材92aと、第3アーム部材92bとを有する。第2アーム部材92aは、その一端が支持軸95に回転可能に支持されている。第3アーム部材92bは、その一端が支持軸95に回転可能に支持されている。第2アーム部材92aと第3アーム部材92bは、支持軸95から水平方向に突出するように形成されている。また、第2アーム部材92aと第3アーム部材92bは、所定の角度を空けた状態で互いに固定されている。このため、第2アーム部材92aと第3アーム部材92bは所定の角度を保った状態で支持軸95に対して回転可能である。
第1ロッド部材93は、棒状の部材であって、第1アーム部材91の先端と、第2アーム部材92aの先端を連結する。第1ロッド部材93の一端は、第1アーム部材91の先端に回転可能に連結されており、第1ロッド部材93の他端は、第2アーム部材92aの先端に回転可能に連結されている。
ここで、第1ロッド部材93の第2アーム部材92aとの連結部分と支持軸95とを結ぶ直線をT3とし、第1ロッド部材93の第1アーム部材91との連結部分と出力軸84とを結ぶ直線をT4とする。また、第1ロッド部材93の第1アーム部材91との連結部分と、第1ロッド部材93の第2アーム部材92aとの連結部分とを結ぶ直線をT5とし、出力軸84と支持軸95を結ぶ直線をT6とする。直線T3と直線T4が平行となり、直線T5と直線T6が平行となり、全体として平行リンクを形成するように、各構成が配置されている。
ここで、第1ロッド部材93の第2アーム部材92aとの連結部分と支持軸95とを結ぶ直線をT3とし、第1ロッド部材93の第1アーム部材91との連結部分と出力軸84とを結ぶ直線をT4とする。また、第1ロッド部材93の第1アーム部材91との連結部分と、第1ロッド部材93の第2アーム部材92aとの連結部分とを結ぶ直線をT5とし、出力軸84と支持軸95を結ぶ直線をT6とする。直線T3と直線T4が平行となり、直線T5と直線T6が平行となり、全体として平行リンクを形成するように、各構成が配置されている。
第2ロッド部材94は、第3アーム部材92bの先端とパイロット弁42とを連結する。第2ロッド部材94の一端は、第3アーム部材92bの先端と互いに回転可能に連結されている。第2ロッド部材94の他端は、パイロット弁42のスプール51と互いに回転可能に接続されている。詳細には、第2ロッド部材94の他端は、スプール51の後部に形成された連結部材51aと互いに回転可能に接続されている。
ここで、パイロット弁42は、スプール51の移動方向B(軸V方向)が、フロントフレーム11がリアフレーム12に対して傾斜していない状態における車体の前後方向(図中矢印Yにて示す)に一致するようにフロントフレーム11に固定されている。
このようなリンク機構90により、ジョイスティックレバー24の回転操作がフロントフレーム11に固定されているパイロット弁42に伝達される。
このようなリンク機構90により、ジョイスティックレバー24の回転操作がフロントフレーム11に固定されているパイロット弁42に伝達される。
(1-2-6.制御部)
制御部28は、電動モータ111を駆動する駆動回路204を有している。制御部28は、トルクT、偏差角度α、および速度Vに基づいて、オペレータのジョイスティックレバー24の操作に対して補助力または反力を付与できる。
また、制御部28は、回転角θin、回転角θs、および図2に示す車速センサ105による車速Vに基づいて、図2に示すように可変減圧部41も制御する。これにより、左右のステアリングシリンダ21、22への油の流量が急減に変化しないように、パイロット弁42に送られるパイロット圧の元圧を制御できる。なお、回転角θinと回転角θsの代わりに、スプール位置検出センサ108によって検出されたスプール51の位置と、車速Vとに基づいて、可変減圧部41を制御してもよい。
制御部28は、電動モータ111を駆動する駆動回路204を有している。制御部28は、トルクT、偏差角度α、および速度Vに基づいて、オペレータのジョイスティックレバー24の操作に対して補助力または反力を付与できる。
また、制御部28は、回転角θin、回転角θs、および図2に示す車速センサ105による車速Vに基づいて、図2に示すように可変減圧部41も制御する。これにより、左右のステアリングシリンダ21、22への油の流量が急減に変化しないように、パイロット弁42に送られるパイロット圧の元圧を制御できる。なお、回転角θinと回転角θsの代わりに、スプール位置検出センサ108によって検出されたスプール51の位置と、車速Vとに基づいて、可変減圧部41を制御してもよい。
また、制御部28による電動モータ111および可変減圧部41の制御は、有線で行われてもよいし、無線によって行われても良い。
<2.動作>
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
(2-1.アーティキュレート動作)
図8A~図8Dは、ホイールローダ1のアーティキュレート動作を説明するための模式図である。
本実施の形態では、例えば、スプール51がスリーブ50内において前後方向の中央位置に位置している場合に中立位置Npとなり、スプール51がスリーブ50内において前後方向の前部に位置している場合に右パイロット位置Rpとなり、スプール51がスリーブ50内において後部に位置している場合に左パイロット位置Lpとなる。
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
(2-1.アーティキュレート動作)
図8A~図8Dは、ホイールローダ1のアーティキュレート動作を説明するための模式図である。
本実施の形態では、例えば、スプール51がスリーブ50内において前後方向の中央位置に位置している場合に中立位置Npとなり、スプール51がスリーブ50内において前後方向の前部に位置している場合に右パイロット位置Rpとなり、スプール51がスリーブ50内において後部に位置している場合に左パイロット位置Lpとなる。
図8Aに示すように、ジョイスティックレバー24が中央位置にある場合、出力軸84は所定の初期位置に位置しており、出力軸84による回転角θinはゼロである。なお、回転角θinは、図5に示すように、ジョイスティックレバー24の中央位置からの回転角を示す。また、ステアリング角θsもゼロである。なお、本実施の形態では、ステアリング角θsは、リアフレーム12に対して前後方向に沿った状態をゼロとして、その状態からの角度を示す。
このとき、スプール51は、スリーブ50に対して中立位置Np(図3参照)に位置する。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32の弁体33も中立位置Nsとなっている。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsはゼロに維持される。
図8Bに示すように、ジョイスティックレバー24が右方向(矢印C参照)へ操作されると、この操作力が連結バー82を介して伝達されステアリング操作軸81も上方からみて右方向に回転する(矢印C参照)。この回転がユニバーサルジョイント部83を介して出力軸84へと伝達され、出力軸84が右回転する。
出力軸84の右回転により第1アーム部材91も右回転し、矢印Dに示すように、第1ロッド部材93が後方に向かって移動する。このように、第1アーム部材91および第1ロッド部材93によってジョイスティックレバー24の回転方向の操作が第1ロッド部材93の長手方向への操作に変換される。そして、第1ロッド部材93の後方への移動により、第2アーム部材92aが支持軸95(アーティキュレート中心A)を中心に右回転(矢印E参照)する。第2アーム部材92aが右回転すると、第2アーム部材92aと固定されている第3アーム部材92bも支持軸95を中心にして右方向に回転する(矢印E参照)。
出力軸84の右回転により第1アーム部材91も右回転し、矢印Dに示すように、第1ロッド部材93が後方に向かって移動する。このように、第1アーム部材91および第1ロッド部材93によってジョイスティックレバー24の回転方向の操作が第1ロッド部材93の長手方向への操作に変換される。そして、第1ロッド部材93の後方への移動により、第2アーム部材92aが支持軸95(アーティキュレート中心A)を中心に右回転(矢印E参照)する。第2アーム部材92aが右回転すると、第2アーム部材92aと固定されている第3アーム部材92bも支持軸95を中心にして右方向に回転する(矢印E参照)。
この第3アーム部材92bの右方向の回転により、図8Bに示すように、第2ロッド部材94が前方(矢印F方向)へ移動する。この第2ロッド部材94の前方への移動により、スプール51が、スリーブ50内を前方(矢印F方向)に押されて右パイロット位置Rpに移動し、第2パイロットポートP8にパイロット圧が供給され、第2パイロット室35にパイロット圧が供給される。
これにより、ステアリング弁32の弁体33が右ステアリング位置Rs側に移動し、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給されるとともに、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出される。すると、図8Cに示すように、ステアリング角θsが除々に増大し、フロントフレーム11がリアフレーム12に対して右方向に向けられる。
このように、フロントフレーム11がリアフレーム12に対して傾斜してアーティキュレート動作が開始しても、第3アーム部材92bおよび第2アーム部材92aはリアフレーム12に固定されているため、フロントフレーム11とともに回転しない。
そのため、フロントフレーム11の回転に伴い、第2ロッド部材94に引っ張られて、スプール51は後方(矢印G)へとスリーブ50内を移動する。
そのため、フロントフレーム11の回転に伴い、第2ロッド部材94に引っ張られて、スプール51は後方(矢印G)へとスリーブ50内を移動する。
オペレータがジョイスティックレバー24を所定の回転角θ1で停止させると、リンク機構90も停止する。一方、ステアリング角θsは除々に増大しているため、スプール51も後方へと移動する。そして、図8Dに示すように、ステアリング角θsが回転角θ1に追いつくと、スプール51はスリーブ50に対して中立位置Npに達する。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなる。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsは回転角θ1に維持される。
このように、ジョイスティックレバー24を右側へ回転させ所定の回転角θ1で停止させると、ステアリング角θsも同じ回転角θ1に維持される。これにより、フロントフレーム11がリアフレーム12に対して右側へ回転角θ1の方向に向けて維持される。
次に、図8Dの状態から図8Eに示すように、オペレータがジョイスティックレバー24を右側位置から中央位置に向けて戻すと、第1アーム部材91が左回転(矢印H参照)し、第1ロッド部材93が前方に移動する(矢印I参照)。これによって、第2アーム部材92aおよび第3アーム部材92bが左回転(矢印J参照)し、第2ロッド部材94が後方に移動し、スリーブ50に対してスプール51も後方に移動する(矢印K参照)。
次に、図8Dの状態から図8Eに示すように、オペレータがジョイスティックレバー24を右側位置から中央位置に向けて戻すと、第1アーム部材91が左回転(矢印H参照)し、第1ロッド部材93が前方に移動する(矢印I参照)。これによって、第2アーム部材92aおよび第3アーム部材92bが左回転(矢印J参照)し、第2ロッド部材94が後方に移動し、スリーブ50に対してスプール51も後方に移動する(矢印K参照)。
すると、パイロット弁42においてスプール51がスリーブ50に対して左パイロット位置Lp側に移動し、第1パイロットポートP7にパイロット圧が供給される。これにより、ステアリング弁32の弁体33が左ステアリング位置Lsに移動し、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給されるとともに、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出される。これによりステアリング角θsが回転角θ1から除々に減少する。
ここで、第3アーム部材92bおよび第2アーム部材92aはリアフレーム12に固定されているため、フロントフレーム11とともに回転しないので、フロントフレーム11の回転に伴い、第2ロッド部材94に押されて、スプール51は前方へとスリーブ50内を移動する。このようにステアリング角θsの変化によってスプール51は前方に向かって移動する。
オペレータがジョイスティックレバー24を中央位置で停止させると、ステアリング角θsも回転角θ1から除々に減少していき、ステアリング角θsがゼロになると、図8Aに示すように、スプール51はスリーブ50に対して中立位置Npに配置される。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなっている。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsもゼロに戻って維持される。これによって、フロントフレーム11はリアフレーム12に対して前後方向に沿った向きに戻される。
なお、ジョイスティックレバー24を左側に回転させた場合は、上記と同様であるため省略する。
なお、ジョイスティックレバー24を左側に回転させた場合は、上記と同様であるため省略する。
(2-2.力付与部の制御)
次に、上述したようなジョイスティックレバー24の操作が行われた際の力付与部27の制御について説明する。
次に、上述したようなジョイスティックレバー24の操作が行われた際の力付与部27の制御について説明する。
本実施の形態のホイールローダ1は、制御部28に記憶されているアシスト情報に基づいて、検出されたトルク等に基づいて補助力または反力を付与するよう電動モータ111を制御する。
上述したようにジョイスティックレバー24による操作が行われるが、制御部28は、トルクセンサ103による検出信号に基づいてジョイスティックレバー24の操作に対して補助力または反力を付与するよう電動モータ111を制御する。
上述したようにジョイスティックレバー24による操作が行われるが、制御部28は、トルクセンサ103による検出信号に基づいてジョイスティックレバー24の操作に対して補助力または反力を付与するよう電動モータ111を制御する。
図9は、トルクセンサ103によって検出されたトルクに対して付与するアシストトルク(アシストトルク情報)を示す図である。図9に示すアシストトルク情報は、制御部28の記憶装置に記憶されている。
図9に示すグラフでは、正のレバー入力トルクが右方向側へのジョイスティックレバー24の回転によって生じるトルクを示し、負のレバー入力トルクが左方向側へのジョイスティックレバー24の回転によって生じるトルクを示す。また、正のアシストトルクが力付与部27によって右回転に力が加えられる場合を示し、負のアシストトルクが力付与部27によって左回転に力が加えられる場合を示す。
図9に示すグラフでは、正のレバー入力トルクが右方向側へのジョイスティックレバー24の回転によって生じるトルクを示し、負のレバー入力トルクが左方向側へのジョイスティックレバー24の回転によって生じるトルクを示す。また、正のアシストトルクが力付与部27によって右回転に力が加えられる場合を示し、負のアシストトルクが力付与部27によって左回転に力が加えられる場合を示す。
すなわち、図9の線L1では、ジョイスティックレバー24を右側に操作した場合に、トルク入力軸部84bに右回転方向に力が付与されることを示し、線L2では、ジョイスティックレバー24を左側に操作した場合に、トルク入力軸部84bに左回転方向に力が付与されることを示す。また、トルクセンサ103によって検出されるトルクの絶対値が大きい程、付加されるアシスト力も大きくなるようアシストトルクが設定されている。
また、図9には、横軸に対して線L2と対称な点線L2´が示されている、点線L2´と線L1を比較するとわかるように、ジョイスティックレバー24を右方向側に操作するときと左方向側に操作するときは、左右対称にアシスト力が付与される。すなわち、ジョイスティックレバー24の左右への操作においてレバー入力トルクの絶対値が等しいときは、同じ大きさのアシスト力が付与される。
オペレータがジョイスティックレバー24を操作してトルク入力軸部84bにトルクが生じると、制御部28は、そのトルクから図9に示すアシストトルク情報に基づいてアシスト力を求め、その補助力を付与するように電動モータ111を制御する。
これにより、ジョイスティックレバー24を操作する際のレバー反力を小さく出来、軽い力で操作することが出来る。
これにより、ジョイスティックレバー24を操作する際のレバー反力を小さく出来、軽い力で操作することが出来る。
(実施の形態2)
次に、本発明に係る実施の形態2におけるホイールローダ1について説明する。本実施の形態2のホイールローダ1では、実施の形態1と異なり、パイロット弁としてスプール弁の代わりにロータリー弁を用いている。また、本実施の形態2では、パイロット弁は、アーティキュレート中心Aに配置されている。本実施の形態2では、実施の形態1との相違点について主に説明する。また、本実施の形態2において実施の形態1と同様の構成について同じ符号を付して、説明を省略する。
次に、本発明に係る実施の形態2におけるホイールローダ1について説明する。本実施の形態2のホイールローダ1では、実施の形態1と異なり、パイロット弁としてスプール弁の代わりにロータリー弁を用いている。また、本実施の形態2では、パイロット弁は、アーティキュレート中心Aに配置されている。本実施の形態2では、実施の形態1との相違点について主に説明する。また、本実施の形態2において実施の形態1と同様の構成について同じ符号を付して、説明を省略する。
<1.構成>
(1-1.パイロット弁)
図10は、本実施の形態2のステアリング操作装置208の構成を示す油圧回路図である。本実施の形態のステアリング操作装置208では、実施の形態1と異なり、ロータリー弁であるパイロット弁242が設けられている。
図11は、パイロット弁242の断面構成図である。
パイロット弁242は、弁体部60と、操作入力軸61と、フィードバック入力軸62と、ハウジング63と、第1スプリング64と、第2スプリング65と、フィードバック部66と、を主に有する。
(1-1.パイロット弁)
図10は、本実施の形態2のステアリング操作装置208の構成を示す油圧回路図である。本実施の形態のステアリング操作装置208では、実施の形態1と異なり、ロータリー弁であるパイロット弁242が設けられている。
図11は、パイロット弁242の断面構成図である。
パイロット弁242は、弁体部60と、操作入力軸61と、フィードバック入力軸62と、ハウジング63と、第1スプリング64と、第2スプリング65と、フィードバック部66と、を主に有する。
(操作入力軸)
操作入力軸61は、その中心軸O周りに回転可能に設けられており、ハウジング63に挿入されている。操作入力軸61は、後述するジョイスティックレバー24と連結部25を介して連結されている。操作入力軸61は、ジョイスティックレバー24の左右への回転角θinと同じ回転角で回転する。
操作入力軸61は、その中心軸O周りに回転可能に設けられており、ハウジング63に挿入されている。操作入力軸61は、後述するジョイスティックレバー24と連結部25を介して連結されている。操作入力軸61は、ジョイスティックレバー24の左右への回転角θinと同じ回転角で回転する。
(フィードバック入力軸)
フィードバック入力軸62は、操作入力軸61と同軸上に配置されており、中心軸O周りに回転可能に設けられている。フィードバック入力軸62は、操作入力軸61と対向するようにハウジング63に挿入されている。フィードバック入力軸62は、後述するフィードバックリンク機構26を介してフロントフレーム11と連結されており、フロントフレーム11のリアフレーム12に対するステアリング角θsと同じ回転角で回転する。
フィードバック入力軸62は、操作入力軸61と同軸上に配置されており、中心軸O周りに回転可能に設けられている。フィードバック入力軸62は、操作入力軸61と対向するようにハウジング63に挿入されている。フィードバック入力軸62は、後述するフィードバックリンク機構26を介してフロントフレーム11と連結されており、フロントフレーム11のリアフレーム12に対するステアリング角θsと同じ回転角で回転する。
(ハウジング)
ハウジング63には、略円筒状の空間が形成されており、上述したように操作入力軸61およびフィードバック入力軸62が挿入されている。ハウジング63には、弁体部60およびフィードバック部66が収納されており、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、および第2パイロットポートP8が形成されている。
ハウジング63には、略円筒状の空間が形成されており、上述したように操作入力軸61およびフィードバック入力軸62が挿入されている。ハウジング63には、弁体部60およびフィードバック部66が収納されており、パイロットポンプポートP5、パイロットドレンポートP6、第1パイロットポートP7、および第2パイロットポートP8が形成されている。
(弁体部)
弁体部60は、操作スプール71と、操作スリーブ72とを有し、操作スプール71が操作スリーブ72に対して回転することにより、中立位置Np、左パイロット位置Lp、および右パイロット位置Rpをとる。
操作スプール71は、略円筒状であって操作入力軸61と同軸上に配置されており、操作入力軸61と接続されている。ジョイスティックレバー24は、連結部25およびリンク機構290を介して操作入力軸61と繋がっており、オペレータがジョイスティックレバー24を回転角θin右側に操作すると、操作入力軸61および操作スプール71も中心軸Oを中心に回転角θin右回転する。また、操作スプール71の操作入力軸61寄りには、中心軸Oを挟むように対向する2か所の位置に周方向に沿ってスリット71a、71bが形成されている。
弁体部60は、操作スプール71と、操作スリーブ72とを有し、操作スプール71が操作スリーブ72に対して回転することにより、中立位置Np、左パイロット位置Lp、および右パイロット位置Rpをとる。
操作スプール71は、略円筒状であって操作入力軸61と同軸上に配置されており、操作入力軸61と接続されている。ジョイスティックレバー24は、連結部25およびリンク機構290を介して操作入力軸61と繋がっており、オペレータがジョイスティックレバー24を回転角θin右側に操作すると、操作入力軸61および操作スプール71も中心軸Oを中心に回転角θin右回転する。また、操作スプール71の操作入力軸61寄りには、中心軸Oを挟むように対向する2か所の位置に周方向に沿ってスリット71a、71bが形成されている。
操作スリーブ72は略円筒状であって、操作スプール71の外側であってハウジング63の内側に、操作スプール71およびハウジング63に対して回転可能に配置されている。
なお、本明細書において右回転および左回転とは、上方から見た場合の回転方向を示す。
なお、本明細書において右回転および左回転とは、上方から見た場合の回転方向を示す。
(第1スプリング)
第1スプリング64は、互いに回転可能な操作スプール71と操作スリーブ72の間に挿入されており、互いの回転角の差に応じた反力を発生させる。
図12(a)は、中心軸Oに対して垂直なAA´間の矢示断面図である。図12(a)に示すように、操作スプール71には、方形状の孔71c、71dが、直径方向の対向壁のそれぞれに設けられている。また、操作スリーブ72の操作入力軸61側の端には、直径方向の対向壁のそれぞれに矩形状の溝72c、72dが形成されている。第1スプリング64は、複数枚の凸形状の板バネを重ね合わせた2組の板バネ部64aから形成される。2組の板バネ部64aは、図12(a)においてX型になるように、凸同士を対向させるように配置されている。2組の板バネ部64aは、操作スプール71の孔71c、71dを貫通して、両端が操作スリーブ72の溝72c、72dに貫入されている。このように第1スプリング64によって操作スプール71と操作スリーブ72は連結されている。
第1スプリング64は、互いに回転可能な操作スプール71と操作スリーブ72の間に挿入されており、互いの回転角の差に応じた反力を発生させる。
図12(a)は、中心軸Oに対して垂直なAA´間の矢示断面図である。図12(a)に示すように、操作スプール71には、方形状の孔71c、71dが、直径方向の対向壁のそれぞれに設けられている。また、操作スリーブ72の操作入力軸61側の端には、直径方向の対向壁のそれぞれに矩形状の溝72c、72dが形成されている。第1スプリング64は、複数枚の凸形状の板バネを重ね合わせた2組の板バネ部64aから形成される。2組の板バネ部64aは、図12(a)においてX型になるように、凸同士を対向させるように配置されている。2組の板バネ部64aは、操作スプール71の孔71c、71dを貫通して、両端が操作スリーブ72の溝72c、72dに貫入されている。このように第1スプリング64によって操作スプール71と操作スリーブ72は連結されている。
図12(a)のように、孔71cと溝72cの周方向の位置が略一致し、孔71dと溝72dの周方向の位置が略一致した状態が、弁体部60が中立位置Npに位置した状態である。
また、ジョイスティックレバー24を操作することによって、図12(b)に示すように操作スプール71が操作スリーブ72に対して回転し、操作スプール71は操作スリーブ72に対して左パイロット位置Lpまたは右パイロット位置Rpに移動する。ジョイスティックレバー24を右側に回転操作すると、操作スプール71は操作スリーブ72に対して右側に回転し右パイロット位置Rpに移動する。また、ジョイスティックレバー24を左側に回転操作すると、操作スプール71は操作スリーブ72に対して左側に回転し左パイロット位置Lpに移動する。
なお、この移動の際には、オペレータは第1スプリング64のバネ力に逆らってジョイスティックレバー24を移動させるため、ジョイスティックレバー24にはレバー反力が生じる。いいかえると、第1スプリング64は、操作スリーブ72に対して中立位置Npに位置するように操作スプール71を付勢する。
また、ジョイスティックレバー24を操作することによって、図12(b)に示すように操作スプール71が操作スリーブ72に対して回転し、操作スプール71は操作スリーブ72に対して左パイロット位置Lpまたは右パイロット位置Rpに移動する。ジョイスティックレバー24を右側に回転操作すると、操作スプール71は操作スリーブ72に対して右側に回転し右パイロット位置Rpに移動する。また、ジョイスティックレバー24を左側に回転操作すると、操作スプール71は操作スリーブ72に対して左側に回転し左パイロット位置Lpに移動する。
なお、この移動の際には、オペレータは第1スプリング64のバネ力に逆らってジョイスティックレバー24を移動させるため、ジョイスティックレバー24にはレバー反力が生じる。いいかえると、第1スプリング64は、操作スリーブ72に対して中立位置Npに位置するように操作スプール71を付勢する。
(フィードバック部)
一方、フィードバック部66は、リアフレーム12に対するフロントフレーム11のステアリング角θsを弁体部60にフィードバックする。フィードバック部66は、フィードバックスプール73と、フィードバックスリーブ74と、ドライブシャフト75と、第1センタピン76と、規制部78と、を主に有する。
一方、フィードバック部66は、リアフレーム12に対するフロントフレーム11のステアリング角θsを弁体部60にフィードバックする。フィードバック部66は、フィードバックスプール73と、フィードバックスリーブ74と、ドライブシャフト75と、第1センタピン76と、規制部78と、を主に有する。
ドライブシャフト75は、操作入力軸61とフィードバック入力軸62の間であって、操作入力軸61とフィードバック入力軸62と同軸上(中心軸O)に配置されている。ドライブシャフト75は、操作スプール71の内側に配置されている。ドライブシャフト75の操作入力軸61側の端には、第1センタピン76が中心軸Oに対して垂直に配置されている。第1センタピン76の両端は、スリット71a、71bを通過して操作スリーブ72に固定されている。詳しくは後述するが、第1センタピン76とスリット71a、71bによって操作スプール71の操作スリーブ72に対する回転角は所定範囲内の角度に規制される。また、第1センタピン76が操作スリーブ72とドライブシャフト75に固定されているため、ドライブシャフト75が回転するとドライブシャフト75と一体化された操作スリーブ72も回転する。
フィードバックスプール73は、略円筒状であってフィードバック入力軸62と同軸上に配置されており、フィードバック入力軸62と接続されている。フィードバックスプール73のフィードバック入力軸62寄りには、中心軸Oを挟むように対向する2か所の位置に周方向に沿ってスリット73a、73bが形成されている。フィードバックスプール73の内側には、ドライブシャフト75が配置されている。フィードバック入力軸62は、後述するフィードバックリンク機構26を介してフロントフレーム11に連結されており、フロントフレーム11がリアフレーム12に対してステアリング角θs右側に回転すると、フィードバック入力軸62およびフィードバックスプール73もステアリング角θsと同じ回転角θs右側に回転する。
フィードバックスリーブ74は略円筒形状であって、フィードバックスプール73の外側であってハウジング63の内側に、フィードバックスプール73およびハウジング63に対して回転可能に配置されている。
規制部78は、フィードバックスリーブ74のフィードバックスプール73に対する回転を所定範囲内の角度に規制する。規制部78は、第2センタピン77と、スリット73a、73bの周方向の両端の壁部73ae、73be(後述する図7参照)によって構成される。
規制部78は、フィードバックスリーブ74のフィードバックスプール73に対する回転を所定範囲内の角度に規制する。規制部78は、第2センタピン77と、スリット73a、73bの周方向の両端の壁部73ae、73be(後述する図7参照)によって構成される。
第2センタピン77は、ドライブシャフト75のフィードバック入力軸62側の端に、中心軸Oに対して垂直に配置されている。第2センタピン77の両端は、スリット73a、73bを通過してフィードバックスリーブ74に固定されている。第2センタピン77とスリット73a、73bによってフィードバックスリーブ74のフィードバックスプール73に対する回転は所定範囲内の角度に規制される。また、第2センタピン77がフィードバックスリーブ74とドライブシャフト75に固定されているため、フィードバックスリーブ74が回転すると、フィードバックスリーブ74と一体化されたドライブシャフト75も回転する。このドライブシャフト75の回転により、第1センタピン76によってドライブシャフト75と固定されている操作スリーブ72が回転する。
(第2スプリング)
第2スプリング65は、互いに回転可能なフィードバックスプール73とフィードバックスリーブ74の間に挿入されており、互いの回転差に応じた反力を発生させる。図12(c)は、図11のBB´間の矢示断面図である。
図12(c)に示すように、フィードバックスプール73には、方形状の孔73c、73dが、直径方向の対向壁のそれぞれに設けられている。
第2スプリング65は、互いに回転可能なフィードバックスプール73とフィードバックスリーブ74の間に挿入されており、互いの回転差に応じた反力を発生させる。図12(c)は、図11のBB´間の矢示断面図である。
図12(c)に示すように、フィードバックスプール73には、方形状の孔73c、73dが、直径方向の対向壁のそれぞれに設けられている。
また、フィードバックスリーブ74のフィードバック入力軸62側の端には、直径方向の対向壁のそれぞれに矩形状の溝74c、74dが形成されている。第2スプリング65は、複数枚の凸形状の板バネを重ね合わせた2組の板バネ部65aから形成される。2組の板バネ部65aは、図12(c)においてX型になるように、凸同士を対向させるように配置されている。2組の板バネ部65aは、フィードバックスプール73の孔73c、73dを貫通して、両端がフィードバックスリーブ74の溝74c、74dに貫入されている。このように、フィードバックスプール73とフィードバックスリーブ74は第2スプリング65によって連結されている。この図12(c)の状態では、孔73cと溝74cが周方向において一致し、孔73dと溝74dが周方向において一致している。このようにフィードバックスプール73の孔73c、73dの周方向の位置に、溝74c、74dの周方向の位置が合うようにフィードバックスリーブ74は第2スプリング65によって付勢されている。
なお、第1スプリング64は操作スプール71が操作スリーブ72に対して規制されるまで撓むが、規制されるまでの第1スプリング64に生じる反力以上の力を加えることによって撓み始めるように第2スプリング65は設定されている。
詳しくは図14を用いて後述するが、操作スプール71が操作スリーブ72に対して規制される角度まで回転し、更に、ジョイスティックレバー24を操作した場合に、図12(d)に示すように、第2スプリング65が撓んでフィードバックスリーブ74はフィードバックスプール73に対して回転する。尚、図12(d)は、図11のBB´間の矢示断面図であり、下方から視ているため、図12(b)と比較して回転方向の矢印が逆向きになっている。
詳しくは図14を用いて後述するが、操作スプール71が操作スリーブ72に対して規制される角度まで回転し、更に、ジョイスティックレバー24を操作した場合に、図12(d)に示すように、第2スプリング65が撓んでフィードバックスリーブ74はフィードバックスプール73に対して回転する。尚、図12(d)は、図11のBB´間の矢示断面図であり、下方から視ているため、図12(b)と比較して回転方向の矢印が逆向きになっている。
すなわち、操作スプール71が操作スリーブ72に対して規制される角度以上にジョイスティックレバー24を操作させる場合には、オペレータは、第2スプリング65の付勢力に逆らってジョイスティックレバー24を操作する必要がある。
上記フィードバック部66の構成によって、ステアリング角の変化に応じてフィードバック入力軸62が回転するとフィードバックスプール73が回転し、フィードバックスプール73と第2スプリング65を介して連結しているフィードバックスリーブ74も回転する。そして、フィードバックスリーブ74と、第2センタピン77、ドライブシャフト75および第1センタピン76を介して固定されている操作スリーブ72が回転し、操作スプール71と操作スリーブ72の回転角の差に変化が生じパイロット圧が変更される。
上記フィードバック部66の構成によって、ステアリング角の変化に応じてフィードバック入力軸62が回転するとフィードバックスプール73が回転し、フィードバックスプール73と第2スプリング65を介して連結しているフィードバックスリーブ74も回転する。そして、フィードバックスリーブ74と、第2センタピン77、ドライブシャフト75および第1センタピン76を介して固定されている操作スリーブ72が回転し、操作スプール71と操作スリーブ72の回転角の差に変化が生じパイロット圧が変更される。
すなわち、パイロット弁242では、操作入力軸61の回転角θinとフィードバック入力軸62の回転角fb(ステアリング角θsと一致する)との差αに応じて、操作スリーブ72に対する操作スプール71の位置が、中立位置Np、左パイロット位置Lpまたは右パイロット位置Rpに移動する。回転角の差αがゼロの場合は、操作スプール71は操作スリーブ72に対して中立位置Npに位置する。また、操作スプール71は操作スリーブ72に対して左パイロット位置Lpまたは右パイロット位置Rpに位置する場合には、パイロット弁42は、回転角の差αに応じてパイロット油圧源43からの油が通過する開口面積を変化させる。これにより、回転角の差αに応じてパイロット弁42からステアリング弁32に送られるパイロット圧が調整される。
なお、操作入力軸61には、例えばロータリセンサによって構成された第1回転角検出部101が設けられている。第1回転角検出部101は、操作入力軸61の回転角θinを検出する。フィードバック入力軸62には、例えばロータリセンサによって構成された第2回転角検出部102が設けられている。また、第2回転角検出部102は、フィードバック入力軸62の回転角θfb(=θs)を検出する。第1回転角検出部101および第2回転角検出部102によって検出された回転角θin、θfbは、検出信号として制御部28に送られる。
上述したように、ステアリング角検出部104によって、連結軸部13においてもステアリング角θsの検出を行っているが、フィードバック入力軸62の回転角θfbは、ステアリング角θsと一致するため、ステアリング角検出部104が設けられていなくてもよい。
上述したように、ステアリング角検出部104によって、連結軸部13においてもステアリング角θsの検出を行っているが、フィードバック入力軸62の回転角θfbは、ステアリング角θsと一致するため、ステアリング角検出部104が設けられていなくてもよい。
(1-2.パイロット弁の配置)
図13はパイロット弁242の配置を示すための側面模式図である。図13に示すように、パイロット弁242は、連結軸部13の上側であってアーティキュレート中心A上に配置されている。パイロット弁242は、その中心軸Oがアーティキュレート中心Aと一致するように配置されている。
図13はパイロット弁242の配置を示すための側面模式図である。図13に示すように、パイロット弁242は、連結軸部13の上側であってアーティキュレート中心A上に配置されている。パイロット弁242は、その中心軸Oがアーティキュレート中心Aと一致するように配置されている。
リアフレーム12にブラケット268が固定されており、ブラケット268は、リアフレーム12からアーティキュレート中心Aまで伸びている。パイロット弁242のハウジング63がブラケット268に固定されている。
本実施の形態2では、図13に示すように、リンク機構90に代えてリンク機構290が設けられている。リンク機構290は、第1アーム部材91と第1ロッド部材93を有しているが、実施の形態1のリンク機構90と異なり、回転部材92と第2ロッド部材94を有していない。またリンク機構290は、操作入力軸61に固定されている入力レバー部材291を有している。入力レバー部材291は、操作入力軸61から水平方向に突出するように設けられている。入力レバー部材291の先端と、第1ロッド部材93が、互いに回転可能に連結されている。
本実施の形態2では、図13に示すように、リンク機構90に代えてリンク機構290が設けられている。リンク機構290は、第1アーム部材91と第1ロッド部材93を有しているが、実施の形態1のリンク機構90と異なり、回転部材92と第2ロッド部材94を有していない。またリンク機構290は、操作入力軸61に固定されている入力レバー部材291を有している。入力レバー部材291は、操作入力軸61から水平方向に突出するように設けられている。入力レバー部材291の先端と、第1ロッド部材93が、互いに回転可能に連結されている。
フィードバック入力軸62の下端は、フィードバックリンク機構26によってフロントフレーム11と連結されている。フィードバック入力軸62は、フロントフレーム11のリアフレーム12に対するステアリング角θsと同じ回転角で回転する。
フィードバックリンク機構26は、フォローアップレバー96と、フォローアップリンク97と、ブラケット98とを有する、
フォローアップリンク97は、パイロット弁242のフィードバック入力軸62に固定されている。ブラケット98は、フロントフレーム11に固定されている。フォローアップリンク97は、フォローアップレバー96とブラケット98とを連結している。
フィードバックリンク機構26は、フォローアップレバー96と、フォローアップリンク97と、ブラケット98とを有する、
フォローアップリンク97は、パイロット弁242のフィードバック入力軸62に固定されている。ブラケット98は、フロントフレーム11に固定されている。フォローアップリンク97は、フォローアップレバー96とブラケット98とを連結している。
このフィードバックリンク機構26によって、リアフレーム12に固定されているパイロット弁242とフロントフレーム11がリンクされている。
フィードバックリンク機構26によってリアフレーム12に対するフロントフレーム11のステアリング角θsと、フィードバック入力軸62の回転角θfbは、同じ角度となる。
フィードバックリンク機構26によってリアフレーム12に対するフロントフレーム11のステアリング角θsと、フィードバック入力軸62の回転角θfbは、同じ角度となる。
すなわち、フロントフレーム11がリアフレーム12に対して連結軸部13を中心にしてステアリング角θs右側に回転した場合には、フィードバックリンク機構26を介してフィードバック入力軸62も回転角θs右回転し、ステアリング角θs左側に回転した場合には、フィードバックリンク機構26を介してフィードバック入力軸62も回転角θs左回転する。
(1-3.レバー反力)
次に、ジョイスティックレバー24を操作する際に第1スプリング64および第2スプリング65によって生じるレバー反力について説明する。
図14(a)は、パイロット弁42を模式的に示した図である。図14(b)は、車体―レバー偏差角度とレバー反力の関係を示す図である。なお、車体―レバー偏差角度αは、ジョイスティックレバー24の回転角θinと、フロントフレーム11のリアフレーム12に対するステアリング角θs(=θfb)の差(θin―θfb)である。また、図14(c)は、偏差角度αがゼロのときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(d)は、偏差角度αがθ2のときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(e)は、偏差角度αがθ3のときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(a)に示すように、CC´間、DD´間、EE´間およびFF´間の断面図は、いずれも上方から視た図である。尚、図14(b)では、説明を分かり易くするためジョイスティックレバー24の遊びは考慮していない。
次に、ジョイスティックレバー24を操作する際に第1スプリング64および第2スプリング65によって生じるレバー反力について説明する。
図14(a)は、パイロット弁42を模式的に示した図である。図14(b)は、車体―レバー偏差角度とレバー反力の関係を示す図である。なお、車体―レバー偏差角度αは、ジョイスティックレバー24の回転角θinと、フロントフレーム11のリアフレーム12に対するステアリング角θs(=θfb)の差(θin―θfb)である。また、図14(c)は、偏差角度αがゼロのときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(d)は、偏差角度αがθ2のときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(e)は、偏差角度αがθ3のときにおける図14(a)のCC´間、DD´間、EE´間およびFF´間の矢示断面図である。図14(a)に示すように、CC´間、DD´間、EE´間およびFF´間の断面図は、いずれも上方から視た図である。尚、図14(b)では、説明を分かり易くするためジョイスティックレバー24の遊びは考慮していない。
オペレータがジョイスティックレバー24を中央位置から回転角θinで回転操作した場合、操作入力軸61も回転角θinで回転する。一方、ステアリングシリンダ21、22の応答が遅れるため、回転角θinに追従してステアリング角θsも除々に大きくなる。このジョイスティックレバー24の回転角θinが目標とするステアリング角を示し、ステアリング角θsが実際の実ステアリング角を示す。ステアリング角θsの変化に対応して、フィードバック入力軸62もステアリング角θsと同じ回転角θsで回転する。そして、フィードバック入力軸62とともにフィードバックスプール73も回転し、その回転によって第2スプリング65を介して連結しているフィードバックスリーブ74も回転する。
ここで、フィードバックスリーブ74と操作スリーブ72は、第1センタピン76、第2センタピン77およびドライブシャフト75によって一体化されているため、フィードバックスリーブ74の回転によって操作スリーブ72も回転する。
すなわち、操作スプール71の回転角と操作スリーブ72の回転角の間に生じた回転角の差が、偏差角度αに対応する(図12(b)参照)。
すなわち、操作スプール71の回転角と操作スリーブ72の回転角の間に生じた回転角の差が、偏差角度αに対応する(図12(b)参照)。
第1スプリング64は、操作スプール71を操作スリーブ72に対して中立位置Npになるように付勢しているため、偏差角度αを大きくするためには、第1スプリング64の付勢力に逆らってジョイスティックレバー24を操作する必要がある。
第1スプリング64は、図14(b)に示すバネ特性S1を有している。第1スプリング64のバネ特性S1では、操作入力軸61を回転させるためには初期反力F1(第1スプリング64を撓ませ始めるために必要な力)以上の力でジョイスティックレバー24を操作する必要がある。また、第1スプリング64のバネ特性S1では、偏差角度αが大きくなるに従ってレバー反力が大きくなる。すなわち、偏差角度αが大きくなるに従って、ジョイスティックレバー24の操作に必要な力が大きくなる。
第1スプリング64は、図14(b)に示すバネ特性S1を有している。第1スプリング64のバネ特性S1では、操作入力軸61を回転させるためには初期反力F1(第1スプリング64を撓ませ始めるために必要な力)以上の力でジョイスティックレバー24を操作する必要がある。また、第1スプリング64のバネ特性S1では、偏差角度αが大きくなるに従ってレバー反力が大きくなる。すなわち、偏差角度αが大きくなるに従って、ジョイスティックレバー24の操作に必要な力が大きくなる。
図14(c)に示すように、偏差角度αがゼロの中立位置Npでは、第1センタピン76は、操作スプール71のスリット71a、71bの中央に配置されている。また、第2センタピン77は、フィードバックスプール73のスリット73a、73bの中央に配置されている。
そして、ジョイスティックレバー24を例えば右側に回転操作して偏差角度αを大きくし、偏差角度αが角度θ2に達すると、図14(d)に示すように、第1センタピン76がスリット71aの周方向に形成されている壁部71aeと、スリット71bの周方向に形成されている壁部71beに当接する。このとき、第2センタピン77は、フィードバックスプール73のスリット73a、73bの中央に配置されている。これは、偏差角度αが角度θ2のときの第1スプリング64による反力をF2とすると、第2スプリング65のバネ特性S2に示すように初期反力(第2スプリング65を撓ませ始めるために必要な力)がF2に設定されているためである。なお、第2スプリング65の初期反力は、F2より大きく設定されていてもよく、F2以上であればよい。
そして、ジョイスティックレバー24を例えば右側に回転操作して偏差角度αを大きくし、偏差角度αが角度θ2に達すると、図14(d)に示すように、第1センタピン76がスリット71aの周方向に形成されている壁部71aeと、スリット71bの周方向に形成されている壁部71beに当接する。このとき、第2センタピン77は、フィードバックスプール73のスリット73a、73bの中央に配置されている。これは、偏差角度αが角度θ2のときの第1スプリング64による反力をF2とすると、第2スプリング65のバネ特性S2に示すように初期反力(第2スプリング65を撓ませ始めるために必要な力)がF2に設定されているためである。なお、第2スプリング65の初期反力は、F2より大きく設定されていてもよく、F2以上であればよい。
更に、オペレータがジョイスティックレバー24を右側に回転操作するためには、第2スプリング65の反力に逆らって操作する必要がある。すなわち、ジョイスティックレバー24を更に右側に回転操作する場合、第1センタピン76が壁部71beと壁部71aeに当接しているため、操作スプール71を回転させようとすると操作スリーブ72ごと回転させる必要がある。また、上述したように操作スリーブ72は、フィードバックスリーブ74と一体化されており、フィードバックスプール73はフィードバック入力軸62と接続されている。このため、ジョイスティックレバー24を更に右側に回転操作する場合には、図12(d)に示すように、第2スプリング65の反力に逆らって操作することになる。
そして、偏差角度αがθ3に達すると、図14(e)に示すように第2センタピン77がスリット73aの周方向に形成されている壁部73aeと、スリット73bの周方向に形成されている壁部73beに当接する。このように、第2センタピン77は、角度(θ3-θ2)回転可能となっている。すなわち、角度θ3よりも偏差角度αが大きく出来ないようにパイロット弁42は構成されている。このため、図14(b)に示すように角度θ3でレバー反力が直線的に立ち上がっている。この第2センタピン77の壁部73ae、73beへの当接が勢い良く行われた場合、急減な反動が発生してオペレータの手首に負担が生じる。この角度θ3は、キャッチアップ角とも呼ばれる。
なお、図14(b)では、ジョイスティックレバー24を右側に回転操作した場合を例に挙げて説明したが、左側に回転操作した場合も同様である。
なお、偏差角度αがθ2に達するまでは、操作スプール71の回転角と操作スリーブ72の回転角に差が生じるが、角度θ2を越えると操作スプール71と操作スリーブ72の間には回転角に差が生じないため、パイロット弁42の開度は一定である。また、偏差角度αが角度θ2~θ3の間は、パイロット弁42の開度は一定であるが、可変減圧部41を制御し偏差角度に応じてパイロット圧を変化させればよい。
なお、偏差角度αがθ2に達するまでは、操作スプール71の回転角と操作スリーブ72の回転角に差が生じるが、角度θ2を越えると操作スプール71と操作スリーブ72の間には回転角に差が生じないため、パイロット弁42の開度は一定である。また、偏差角度αが角度θ2~θ3の間は、パイロット弁42の開度は一定であるが、可変減圧部41を制御し偏差角度に応じてパイロット圧を変化させればよい。
<2.動作>
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
ジョイスティックレバー24が中央位置にある場合、操作入力軸61は所定の初期位置に位置しており、操作入力軸61による回転角θinはゼロである。また、ステアリング角θsもゼロであるため、フィードバック入力軸62も所定の初期位置に位置している。なお、本実施の形態では、ステアリング角θsは、図14(a)に示すように、リアフレーム12に対して前後方向に沿った状態をゼロとして、その状態からの角度を示す。また、回転角θinは、図5に示すように、ジョイスティックレバー24の中央位置からの回転角を示す。また、偏差角を求める際には、例えば、右方向への回転をプラスの角度、左方向への回転をマイナスの角度として演算しても良い。
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
ジョイスティックレバー24が中央位置にある場合、操作入力軸61は所定の初期位置に位置しており、操作入力軸61による回転角θinはゼロである。また、ステアリング角θsもゼロであるため、フィードバック入力軸62も所定の初期位置に位置している。なお、本実施の形態では、ステアリング角θsは、図14(a)に示すように、リアフレーム12に対して前後方向に沿った状態をゼロとして、その状態からの角度を示す。また、回転角θinは、図5に示すように、ジョイスティックレバー24の中央位置からの回転角を示す。また、偏差角を求める際には、例えば、右方向への回転をプラスの角度、左方向への回転をマイナスの角度として演算しても良い。
このとき、操作スプール71は、操作スリーブ72に対して図12(a)に示す中立位置Npに位置する。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32の弁体33も中立位置Nsとなっている。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsはゼロに維持され、フィードバック入力軸62の回転角θfb(=θs)もゼロに維持される。
次に、オペレータがジョイスティックレバー24を図5に示すように中央位置から右側に回転させるために操作力Finを加える。操作力Finが第1スプリング64のF1を越えると操作入力軸61がジョイスティックレバー24と同様に右方向に回転して操作入力軸61の回転角θinが増大する。このとき、左右のステアリングシリンダ21、22の反応の遅れのために、ステアリング角θsはまだゼロの状態であり、フィードバック入力軸62の回転角θfb(=θs)もゼロである。このため、回転角θinとステアリング角θsの偏差角度(α=θin―θs)は増大する。
上記操作入力軸61の回転とともに操作スプール71が操作スリーブ72に対して右回転する。ここで、操作スリーブ72は、フィードバックスリーブ74と一体化されており、フィードバックスリーブ74は、第2スプリング65によってフィードバックスプール73と連結されている。そして、第2スプリング65の初期反力F2は、図14(b)に示す第1スプリング64のバネ特性S1の反力以上である。そのため、操作スリーブ72は、操作スプール71に連れられて回転せず、操作スプール71は操作スリーブ72に対して右回転する。
このように、操作スプール71は操作スリーブ72に対して右回転して右パイロット位置Rpに移動し、第2パイロットポートP8にパイロット圧が供給され、第2パイロット室35にパイロット圧が供給される。
これにより、ステアリング弁32の弁体33が右ステアリング位置Rsに移動し、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給されるとともに、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出される。これによりステアリング角θsが除々に増大し、フロントフレーム11がリアフレーム12に対して右方向に向けられる(図3のR参照)。このステアリング角θsの変化は、フィードバックリンク機構26によってフィードバック入力軸62へと伝達され、フィードバック入力軸62は回転角θsで回転する。
これにより、ステアリング弁32の弁体33が右ステアリング位置Rsに移動し、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給されるとともに、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出される。これによりステアリング角θsが除々に増大し、フロントフレーム11がリアフレーム12に対して右方向に向けられる(図3のR参照)。このステアリング角θsの変化は、フィードバックリンク機構26によってフィードバック入力軸62へと伝達され、フィードバック入力軸62は回転角θsで回転する。
オペレータがジョイスティックレバー24を所定の回転角θ1で停止させると、操作入力軸61も回転角θ1で停止する。一方、ステアリング角θsは除々に増大しているため、フィードバック入力軸62の回転角θsも増大する。フィードバック入力軸62とともにフィードバックスプール73も回転し、フィードバックスプール73と第2スプリング65を介して連結しているフィードバックスリーブ74も回転する。フィードバックスリーブ74は、第1センタピン76、第2センタピン77、およびドライブシャフト75を介して操作スリーブ72と一体化されているため、フィードバックスリーブ74の回転とともに操作スリーブ72も回転する。操作スリーブ72の回転によって操作スリーブ72と操作スプール71の回転角の差(偏差角度α)は小さくなる。そして、ステアリング角θs(フィードバック入力軸62の回転角θs)が回転角θ1(操作入力軸61の回転角θin)に追いつくと、偏差角度αがゼロになる。このとき、パイロット弁42の操作スプール71は操作スリーブ72に対して中立位置Npに位置している。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなる。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsは回転角θ1に維持される。
このように、ジョイスティックレバー24を右側へ回転させ所定の回転角θ1で停止させると、ステアリング角θsも同じ回転角θ1に維持される。これにより、フロントフレーム11がリアフレーム12に対して右側へ回転角θ1の方向に向けて維持される。
次に、オペレータがジョイスティックレバー24を右側位置から中央位置に向けて戻すと、操作入力軸61も同様に回転して操作入力軸61の回転角θinが減少する。このとき、左右のステアリングシリンダ21、22の反応の遅れのために、ステアリング角θsはまだ回転角θ1の状態である。このため、回転角の差α(=θin―θs)はゼロから減少してマイナスになる。すると、操作スプール71が操作スリーブ72に対して左回転して左パイロット位置Lpに移動し、第1パイロットポートP7にパイロット圧が供給される。これにより、ステアリング弁32の弁体33が左ステアリング位置Lsに移動し、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給されるとともに、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出される。これによりステアリング角θsが回転角θ1から除々に減少する。このステアリング角θsの変化は、フィードバックリンク機構26によってフィードバック入力軸62へと伝達され、フィードバック入力軸62はステアリング角θsの変化と同じ回転角の変化で回転する。
次に、オペレータがジョイスティックレバー24を右側位置から中央位置に向けて戻すと、操作入力軸61も同様に回転して操作入力軸61の回転角θinが減少する。このとき、左右のステアリングシリンダ21、22の反応の遅れのために、ステアリング角θsはまだ回転角θ1の状態である。このため、回転角の差α(=θin―θs)はゼロから減少してマイナスになる。すると、操作スプール71が操作スリーブ72に対して左回転して左パイロット位置Lpに移動し、第1パイロットポートP7にパイロット圧が供給される。これにより、ステアリング弁32の弁体33が左ステアリング位置Lsに移動し、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給されるとともに、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出される。これによりステアリング角θsが回転角θ1から除々に減少する。このステアリング角θsの変化は、フィードバックリンク機構26によってフィードバック入力軸62へと伝達され、フィードバック入力軸62はステアリング角θsの変化と同じ回転角の変化で回転する。
オペレータがジョイスティックレバー24を中央位置で停止させると、操作入力軸61も初期位置すなわち回転角θinがゼロの位置で停止する。一方、ステアリング角θsも回転角θ1から除々に減少しているため、回転角の差(偏差角度)αは除々に小さくなる。そして、ステアリング角θsがゼロになると、フィードバック入力軸62の回転角θfb(=θs)もゼロとなり、回転角の差αはゼロとなる。このとき、操作スプール71は操作スリーブ72に対して中立位置Npに配置されている。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなっている。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsもゼロに戻って維持される。これによって、フロントフレーム11はリアフレーム12に対して前後方向に沿った向きに戻される。
なお、ジョイスティックレバー24を左側に回転させた場合は、上記と同様であるため省略する。
以上のように、リンク機構290を設けることによって、パイロット弁242をアーティキュレート中心Aに配置することができる。
以上のように、リンク機構290を設けることによって、パイロット弁242をアーティキュレート中心Aに配置することができる。
(実施の形態3)
次に、本発明に係る実施の形態3におけるホイールローダ1について説明する。本実施の形態3のホイールローダ1では、実施の形態2と異なり、パイロット弁242が、フロントフレーム11にマウントブラケットを介して固定されている。本実施の形態3では、実施の形態2との相違点について主に説明する。また、本実施の形態3において実施の形態2と同様の構成について同じ符号を付して、説明を省略する。
<1.構成>
(1-1.パイロット弁)
図15は、本実施の形態3のステアリング操作装置308の構成を示す油圧回路図である。
図16は、パイロット弁242の断面構成図である。図17は、パイロット弁242の設置を説明するための側面模式図である。
次に、本発明に係る実施の形態3におけるホイールローダ1について説明する。本実施の形態3のホイールローダ1では、実施の形態2と異なり、パイロット弁242が、フロントフレーム11にマウントブラケットを介して固定されている。本実施の形態3では、実施の形態2との相違点について主に説明する。また、本実施の形態3において実施の形態2と同様の構成について同じ符号を付して、説明を省略する。
<1.構成>
(1-1.パイロット弁)
図15は、本実施の形態3のステアリング操作装置308の構成を示す油圧回路図である。
図16は、パイロット弁242の断面構成図である。図17は、パイロット弁242の設置を説明するための側面模式図である。
図16に示すように、本実施の形態3のパイロット弁242では、フィードバック入力軸62およびハウジング63が、マウントブラケット368に固定されている。マウントブラケット368は、図17に示すように、フロントフレーム11に固定されている。このように、パイロット弁121は、フロントフレーム11に固定されている。
(1-2.リンク機構390)
本実施の形態のリンク機構390は、実施の形態1のリンク機構90に更に、入力レバー部材391が設けられている。すなわち、リンク機構390は、第1アーム部材91、回転部材92、第1ロッド部材93、第2ロッド部材94、および入力レバー部材391を有している。
入力レバー部材391は、操作入力軸61に固定されている。入力レバー部材391は、操作入力軸61から水平方向に突出するように設けられている。
入力レバー部材391は、第2ロッド部材94の前側の端と互いに回転可能に連結されている。
本実施の形態のリンク機構390は、実施の形態1のリンク機構90に更に、入力レバー部材391が設けられている。すなわち、リンク機構390は、第1アーム部材91、回転部材92、第1ロッド部材93、第2ロッド部材94、および入力レバー部材391を有している。
入力レバー部材391は、操作入力軸61に固定されている。入力レバー部材391は、操作入力軸61から水平方向に突出するように設けられている。
入力レバー部材391は、第2ロッド部材94の前側の端と互いに回転可能に連結されている。
<2.動作>
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
図18A~図18Dは、本実施の形態3のホイールローダ1のアーティキュレート動作を示す図である。図18Aに示すように、本実施の形態では、例えば、アーティキュレート中心Aとパイロット弁242の中心軸Oとを結ぶ直線T1に対して、第2ロッド部材94と入力レバー部材291との連結部391aと中心軸Oを結ぶ直線T2が垂直に配置されている状態が中立位置Npとなるように設置されている。
以下に、本実施の形態のホイールローダ1のアーティキュレート動作について説明する。
図18A~図18Dは、本実施の形態3のホイールローダ1のアーティキュレート動作を示す図である。図18Aに示すように、本実施の形態では、例えば、アーティキュレート中心Aとパイロット弁242の中心軸Oとを結ぶ直線T1に対して、第2ロッド部材94と入力レバー部材291との連結部391aと中心軸Oを結ぶ直線T2が垂直に配置されている状態が中立位置Npとなるように設置されている。
図18Aに示す状態から、図18Bに示すように、ジョイスティックレバー24を回転角θin右回転し回転角θinで停止すると、第1アーム部材91が右回転(矢印C参照)し、第1ロッド部材93が後方(矢印D参照)に移動し、第2アーム部材92aと第3アーム部材92bが右回転(矢印E参照)に回転する。この回転により、第2ロッド部材94が前方(矢印F方向)に移動して、入力レバー部材391が右方向(矢印L参照)に回転する。これにより、操作入力軸61も回転角θin回転する。
操作入力軸61の回転とともに操作スプール71が操作スリーブ72に対して右回転する。ここで、操作スリーブ72は、フィードバックスリーブ74と一体化されており、フィードバックスリーブ74は、第2スプリング65によってフィードバックスプール73と連結されている。そして、第2スプリング65の初期反力F2は、図7(b)に示す第1スプリング64のバネ特性S1の反力以上である。そのため、操作スリーブ72は、操作スプール71に連れられて回転せず、操作スプール71は操作スリーブ72に対して右回転する。
このように、操作スプール71は操作スリーブ72に対して右回転して右パイロット位置Rpに移動し、第2パイロットポートP8にパイロット圧が供給され、第2パイロット室35にパイロット圧が供給される。
これにより、ステアリング弁32の弁体33が右ステアリング位置Rsに移動し、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給されるとともに、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出される。これによりステアリング角θsが除々に増大し、フロントフレーム11がリアフレーム12に対して右方向に向けられる(図18CのR参照)。
これにより、ステアリング弁32の弁体33が右ステアリング位置Rsに移動し、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bに油が供給されるとともに、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aから油が排出される。これによりステアリング角θsが除々に増大し、フロントフレーム11がリアフレーム12に対して右方向に向けられる(図18CのR参照)。
ここで、第2アーム部材92aおよび第3アーム部材92bはフロントフレーム11に伴って回転しないため、フロントフレーム11のリアフレーム12に対するアーティキュレート動作に伴って、入力レバー部材291は第2ロッド部材94に引っ張られて左回転(矢印M参照)する。
そして、ステアリング角θsが、ジョイスティックレバー24が停止した回転角θ1に一致すると、図18Dに示すように、入力レバー部材391の位置は、直線T1と直線T2が垂直になっている状態となり、パイロット弁42は中立位置Npの状態となる。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなる。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsは回転角θ1に維持される。
そして、ステアリング角θsが、ジョイスティックレバー24が停止した回転角θ1に一致すると、図18Dに示すように、入力レバー部材391の位置は、直線T1と直線T2が垂直になっている状態となり、パイロット弁42は中立位置Npの状態となる。この場合、ステアリング弁32の第1パイロット室34と第2パイロット室35のパイロット圧は同じであり、ステアリング弁32も中立位置Nsとなる。このため、左右のステアリングシリンダ21、22への油の供給または排出が行われておらず、ステアリング角θsは回転角θ1に維持される。
このように、ジョイスティックレバー24を右側へ回転させ所定の回転角θ1で停止させると、ステアリング角θsも同じ回転角θ1に維持される。これにより、フロントフレーム11がリアフレーム12に対して右側へ回転角θ1の方向に向けて維持される。
なお、オペレータがジョイスティックレバー24を左回転(矢印H参照)させて右側位置から中央位置に向けて戻すと、図18Eに示すように、第1アーム部材91も左回転(矢印H参照)し、第1ロッド部材93は前方(矢印I参照)に向かって移動する。すると、第2アーム部材92aおよび第3アーム部材92bは、アーティキュレート中心Aを中心に左回転(矢印J参照)し、第2ロッド部材94が後方(矢印K参照)に移動する。これにより、入力レバー部材291も左回転(矢印M参照)し、操作入力軸61も-θin回転する。すると、操作スプール71が操作スリーブ72に対して左回転して左パイロット位置Lpに移動し、第1パイロットポートP7にパイロット圧が供給される。これにより、ステアリング弁32の弁体33が左ステアリング位置Lsに移動し、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給されるとともに、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出される。これによりステアリング角θsが回転角θ1から除々に減少する。
なお、オペレータがジョイスティックレバー24を左回転(矢印H参照)させて右側位置から中央位置に向けて戻すと、図18Eに示すように、第1アーム部材91も左回転(矢印H参照)し、第1ロッド部材93は前方(矢印I参照)に向かって移動する。すると、第2アーム部材92aおよび第3アーム部材92bは、アーティキュレート中心Aを中心に左回転(矢印J参照)し、第2ロッド部材94が後方(矢印K参照)に移動する。これにより、入力レバー部材291も左回転(矢印M参照)し、操作入力軸61も-θin回転する。すると、操作スプール71が操作スリーブ72に対して左回転して左パイロット位置Lpに移動し、第1パイロットポートP7にパイロット圧が供給される。これにより、ステアリング弁32の弁体33が左ステアリング位置Lsに移動し、ステアリングシリンダ21の収縮ポート21bおよびステアリングシリンダ22の伸長ポート22aに油が供給されるとともに、ステアリングシリンダ21の伸長ポート21aおよびステアリングシリンダ22の収縮ポート22bから油が排出される。これによりステアリング角θsが回転角θ1から除々に減少する。
ここで、第2アーム部材92aおよび第3アーム部材92bはフロントフレーム11に伴って回転しないため、フロントフレーム11のリアフレーム12に対する回転に伴って、入力レバー部材291は第2ロッド部材94によって押されて右回転する。
そして、ステアリング角θsがジョイスティックレバー24の回転角-θinに一致すると、図18Aに示すように、入力レバー部材291の位置は、直線T1と直線T2が垂直になっている状態となり、パイロット弁42は中立位置Npの状態となる。
そして、ステアリング角θsがジョイスティックレバー24の回転角-θinに一致すると、図18Aに示すように、入力レバー部材291の位置は、直線T1と直線T2が垂直になっている状態となり、パイロット弁42は中立位置Npの状態となる。
(特徴等)
(1)
本実施の形態のホイールローダ1(作業車両の一例)は、フロントフレーム11とリアフレーム12が連結されたアーティキュレート式である。ホイールローダ1は、ステアリングシリンダ21、22(油圧アクチュエータの一例)と、パイロット弁42、242(制御弁の一例)と、ジョイスティックレバー24と、リンク機構90、290、390(第1リンク機構の一例)と、を備える。ステアリングシリンダ21、22は、油圧によって駆動されフロントフレーム11のリアフレーム12に対するステアリング角θsを変更する。パイロット弁42、242は、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、リアフレーム12上に設けられたキャブ5内に配置されオペレータによって操作される。リンク機構90、290、390は、キャブ5の下側に配置されジョイスティックレバー24の操作をパイロット弁42、242に伝達する。
(1)
本実施の形態のホイールローダ1(作業車両の一例)は、フロントフレーム11とリアフレーム12が連結されたアーティキュレート式である。ホイールローダ1は、ステアリングシリンダ21、22(油圧アクチュエータの一例)と、パイロット弁42、242(制御弁の一例)と、ジョイスティックレバー24と、リンク機構90、290、390(第1リンク機構の一例)と、を備える。ステアリングシリンダ21、22は、油圧によって駆動されフロントフレーム11のリアフレーム12に対するステアリング角θsを変更する。パイロット弁42、242は、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、リアフレーム12上に設けられたキャブ5内に配置されオペレータによって操作される。リンク機構90、290、390は、キャブ5の下側に配置されジョイスティックレバー24の操作をパイロット弁42、242に伝達する。
ここで、ジョイスティックレバー24の操作をパイロット弁42、242に伝達するために、キャブ5の下側にリンク機構90、290、390が設けられているので、パイロット弁42、242を運転席5aの直下近傍に限らず、運転席から離れた位置に配置することが可能となり、ホイールローダ1の構造に合わせた位置に配置することが出来る。このため、弁の設置場所の自由度をあげることが出来る。
(2)
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁42、242は、フロントフレーム11に配置されている。
これにより、運転席5aの下方に場積が少ない場合であっても、フロントフレーム11にパイロット弁42、242を配置することが出来る。
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁42、242は、フロントフレーム11に配置されている。
これにより、運転席5aの下方に場積が少ない場合であっても、フロントフレーム11にパイロット弁42、242を配置することが出来る。
(3)
本実施の形態のホイールローダ1(作業車両の一例)では、ステアリング弁32を更に備える。ステアリング弁32は、パイロット弁42、242から入力されるパイロット圧に基づいてステアリングシリンダ21、22に供給される油の流量を調整する。パイロット弁42
242は、パイロット圧を調整することにより、ステアリング弁32からステアリングシリンダ21、22に供給される油の流量を制御する。
本実施の形態のホイールローダ1(作業車両の一例)では、ステアリング弁32を更に備える。ステアリング弁32は、パイロット弁42、242から入力されるパイロット圧に基づいてステアリングシリンダ21、22に供給される油の流量を調整する。パイロット弁42
242は、パイロット圧を調整することにより、ステアリング弁32からステアリングシリンダ21、22に供給される油の流量を制御する。
これにより、パイロット圧を調整するパイロット弁42、242の設置場所の自由度をあげることが出来る。
また、上記構成により、オペレータの操作によってパイロット圧を調整し、ステアリング弁32からステアリングシリンダ21、22への油の供給量が制御され、フロントフレーム11のリアフレーム12に対するステアリング角θsが変更される。
また、上記構成により、オペレータの操作によってパイロット圧を調整し、ステアリング弁32からステアリングシリンダ21、22への油の供給量が制御され、フロントフレーム11のリアフレーム12に対するステアリング角θsが変更される。
(4)
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁42は、フロントフレーム11に配置されている。パイロット弁42は、弁体としてスプール51を有し、スプール51が、その軸方向に沿って移動することにより、油の流量を制御する。
リンク機構90を有することにより、ジョイスティックレバー24の操作をフロントフレーム11まで伝達することができる。このため、ジョイスティックレバー24の操作が伝達されるパイロット弁42としてスプール弁を用いることができる。
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁42は、フロントフレーム11に配置されている。パイロット弁42は、弁体としてスプール51を有し、スプール51が、その軸方向に沿って移動することにより、油の流量を制御する。
リンク機構90を有することにより、ジョイスティックレバー24の操作をフロントフレーム11まで伝達することができる。このため、ジョイスティックレバー24の操作が伝達されるパイロット弁42としてスプール弁を用いることができる。
(5)
本実施の形態のホイールローダ1(作業車両の一例)は、力付与部27を更に備える。力付与部27は、駆動源として電動モータ111を有し、ジョイスティックレバー24の操作に対して補助力または反力を付与する。
ここで、ジョイスティックレバーの操作に必要な力は、主にパイロット弁42、242によって決まるが、力付与部27によってジョイスティックレバー24の操作に対して補助力または反力を付与することにより、ホイールローダ1の状態に合わせて操作感を変更できる。
本実施の形態のホイールローダ1(作業車両の一例)は、力付与部27を更に備える。力付与部27は、駆動源として電動モータ111を有し、ジョイスティックレバー24の操作に対して補助力または反力を付与する。
ここで、ジョイスティックレバーの操作に必要な力は、主にパイロット弁42、242によって決まるが、力付与部27によってジョイスティックレバー24の操作に対して補助力または反力を付与することにより、ホイールローダ1の状態に合わせて操作感を変更できる。
ジョイスティックレバー24を操作してパイロット弁42、242を操作する際に、ジョイスティックレバー24の操作に対して補助力を付与することによって、オペレータは容易に操作することができる。例えば、パイロット弁42としてスプール弁を用いた場合、リンク機構90も介しているため、ジョイスティックレバー24の操作が重くなることが想定されるが、補助力を付与することによって操作性が向上する。
なお、例えば、ホイールローダ1を低速で動かす場合には、ジョイスティックレバー24に補助力を付与してジョイスティックレバー24の操作に必要な力を小さくすることによって、操作性を向上することができる。一方、ホイールローダ1の走行速度が低速から高速に変更した場合には、ジョイスティックレバー24に反力を付与しジョイスティックレバー24の操作に必要な力を大きくすることによって、走行安定性を向上することができる。
このように、ホイールローダ1の走行状態に合わせてジョイスティックレバーの操作に必要な力を適宜変更することより、オペレータの操作感を改善できる。
このように、ホイールローダ1の走行状態に合わせてジョイスティックレバーの操作に必要な力を適宜変更することより、オペレータの操作感を改善できる。
(6)
本実施の形態のホイールローダ1(作業車両の一例)は、連結部25を更に備える。連結部25は、ジョイスティックレバー24とリンク機構90、290、390を連結する。力付与部27は、連結部25に補助力または反力を伝達するウォームギア112(伝達機構の一例)を更に有する。
これにより、ジョイスティックレバー24とパイロット弁42、242を連結する連結部25に力付与部27の力を伝達でき、ジョイスティックレバー24の操作に必要な力を変更できる。
本実施の形態のホイールローダ1(作業車両の一例)は、連結部25を更に備える。連結部25は、ジョイスティックレバー24とリンク機構90、290、390を連結する。力付与部27は、連結部25に補助力または反力を伝達するウォームギア112(伝達機構の一例)を更に有する。
これにより、ジョイスティックレバー24とパイロット弁42、242を連結する連結部25に力付与部27の力を伝達でき、ジョイスティックレバー24の操作に必要な力を変更できる。
(7)
本実施の形態のホイールローダ1(作業車両の一例)は、トルクセンサ103と、制御部28と、を更に備える。トルクセンサ103は、ジョイスティックレバー24の操作によって生じるトルクを検出する。制御部28は、トルクセンサ103の検出値に基づいて、電動モータ111を制御する。
これにより、オペレータがジョイスティックレバー24に加えたトルクに応じて力を付与できる。例えば、オペレータがジョイスティックレバー24に加えたトルクが大きいときには、力付与部27によって付与する補助力を大きくし、トルクが小さいときには補助力を小さくするように付与する力の大きさを制御することができる。
本実施の形態のホイールローダ1(作業車両の一例)は、トルクセンサ103と、制御部28と、を更に備える。トルクセンサ103は、ジョイスティックレバー24の操作によって生じるトルクを検出する。制御部28は、トルクセンサ103の検出値に基づいて、電動モータ111を制御する。
これにより、オペレータがジョイスティックレバー24に加えたトルクに応じて力を付与できる。例えば、オペレータがジョイスティックレバー24に加えたトルクが大きいときには、力付与部27によって付与する補助力を大きくし、トルクが小さいときには補助力を小さくするように付与する力の大きさを制御することができる。
(8)
本実施の形態のホイールローダ1(作業車両の一例)では、リンク機構90、390は、第1アーム部材91(アーム部材の一例)と、回転部材92と、第1ロッド部材93と、第2ロッド部材94とを有する。第1アーム部材91は、ジョイスティックレバー24に連結されジョイスティックレバー24の回転操作とともに回転する。回転部材92は、アーティキュレート中心Aと同軸上に回転可能に配置されている。第1ロッド部材93は、第1アーム部材91と回転部材92とを連結する。第2ロッド部材94は、回転部材92とパイロット弁42、424を連結する。
このようなリンク機構90、390により、リアフレーム12に設けられているジョイスティックレバー24の操作をフロントフレーム11に配置されているパイロット弁42、424まで伝達することが出来る。
本実施の形態のホイールローダ1(作業車両の一例)では、リンク機構90、390は、第1アーム部材91(アーム部材の一例)と、回転部材92と、第1ロッド部材93と、第2ロッド部材94とを有する。第1アーム部材91は、ジョイスティックレバー24に連結されジョイスティックレバー24の回転操作とともに回転する。回転部材92は、アーティキュレート中心Aと同軸上に回転可能に配置されている。第1ロッド部材93は、第1アーム部材91と回転部材92とを連結する。第2ロッド部材94は、回転部材92とパイロット弁42、424を連結する。
このようなリンク機構90、390により、リアフレーム12に設けられているジョイスティックレバー24の操作をフロントフレーム11に配置されているパイロット弁42、424まで伝達することが出来る。
(9)
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁242は、操作入力軸61(第1入力部材の一例)と、フィードバック入力軸62(第2入力部材の一例)と、第1スプリング64(付勢部の一例)および第2スプリング65(付勢部の一例)と、を有する。操作入力軸61は、リンク機構290、390を介してジョイスティックレバー24に連結されジョイスティックレバー24の操作量に応じて変位する。フィードバック入力軸62は、フロントフレーム11に固定されている。第1スプリング64および第2スプリング65は、フィードバック入力軸62に対する操作入力軸61の変位量がゼロである中立位置Npになるように操作入力軸61を付勢する。パイロット弁242は、フロントフレーム11またはアーティキュレート中心Aに、操作入力軸61とフィードバック入力軸62が鉛直方向に沿うように配置されている。パイロット弁242は、フィードバック入力軸62に対する操作入力軸61の変位量に応じて、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、第1スプリング64および第2スプリング65による付勢力に対抗して操作される。
本実施の形態のホイールローダ1(作業車両の一例)では、パイロット弁242は、操作入力軸61(第1入力部材の一例)と、フィードバック入力軸62(第2入力部材の一例)と、第1スプリング64(付勢部の一例)および第2スプリング65(付勢部の一例)と、を有する。操作入力軸61は、リンク機構290、390を介してジョイスティックレバー24に連結されジョイスティックレバー24の操作量に応じて変位する。フィードバック入力軸62は、フロントフレーム11に固定されている。第1スプリング64および第2スプリング65は、フィードバック入力軸62に対する操作入力軸61の変位量がゼロである中立位置Npになるように操作入力軸61を付勢する。パイロット弁242は、フロントフレーム11またはアーティキュレート中心Aに、操作入力軸61とフィードバック入力軸62が鉛直方向に沿うように配置されている。パイロット弁242は、フィードバック入力軸62に対する操作入力軸61の変位量に応じて、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、第1スプリング64および第2スプリング65による付勢力に対抗して操作される。
これにより、運転席5aの下方に場積が少ない場合であっても、いわゆるロータリー弁であるパイロット弁242をフロントフレーム11またはアーティキュレート中心Aに配置することができる。
また、上記構成により、ジョイスティックレバー24を操作した後、ジョイスティックレバー24に追従してステアリング角θsが変更し、ジョイスティックレバー24の操作量θinとステアリング角θsが一致するとパイロット弁242は中立位置Npとなる。
また、このようにパイロット弁242には第1スプリング64および第2スプリング65が設けられており、オペレータは第1スプリング64および第2スプリング65による付勢力に対抗する操作力でジョイスティックレバー24を操作する。この付勢力に対抗する操作に対して補助力または反力を付与することができる。
また、上記構成により、ジョイスティックレバー24を操作した後、ジョイスティックレバー24に追従してステアリング角θsが変更し、ジョイスティックレバー24の操作量θinとステアリング角θsが一致するとパイロット弁242は中立位置Npとなる。
また、このようにパイロット弁242には第1スプリング64および第2スプリング65が設けられており、オペレータは第1スプリング64および第2スプリング65による付勢力に対抗する操作力でジョイスティックレバー24を操作する。この付勢力に対抗する操作に対して補助力または反力を付与することができる。
(10)
本実施の形態のホイールローダ1(作業車両の一例)は、フィードバックリンク機構26(第2リンク機構の一例)を更に備える。パイロット弁242(制御弁の一例)は、操作入力軸61(第1入力部材の一例)と、フィードバック入力軸62(第2入力部材の一例)と、第1スプリング64(付勢部の一例)および第2スプリング65(付勢部の一例)とを有する。操作入力軸61は、リンク機構290を介してジョイスティックレバー24に連結されジョイスティックレバー24の操作量に応じて変位する。フィードバック入力軸62は、ステアリング角θsに応じて変化する。第1スプリング64および第2スプリング65は、操作入力軸61のフィードバック入力軸62に対する変位量がゼロである中立位置Npになるように操作入力軸61を付勢する。フィードバックリンク機構26は、フロントフレーム11とフィードバック入力軸62とを連結し、ステアリング角θsの変化をフィードバック入力軸62に伝達する。パイロット弁242は、アーティキュレート中心Aに、操作入力軸61とフィードバック入力軸62が、鉛直方向に沿うように配置されており、フィードバック入力軸62に対する操作入力軸61の変位量に応じて、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、第1スプリング64および第2スプリング65による付勢力に対抗して操作される。
本実施の形態のホイールローダ1(作業車両の一例)は、フィードバックリンク機構26(第2リンク機構の一例)を更に備える。パイロット弁242(制御弁の一例)は、操作入力軸61(第1入力部材の一例)と、フィードバック入力軸62(第2入力部材の一例)と、第1スプリング64(付勢部の一例)および第2スプリング65(付勢部の一例)とを有する。操作入力軸61は、リンク機構290を介してジョイスティックレバー24に連結されジョイスティックレバー24の操作量に応じて変位する。フィードバック入力軸62は、ステアリング角θsに応じて変化する。第1スプリング64および第2スプリング65は、操作入力軸61のフィードバック入力軸62に対する変位量がゼロである中立位置Npになるように操作入力軸61を付勢する。フィードバックリンク機構26は、フロントフレーム11とフィードバック入力軸62とを連結し、ステアリング角θsの変化をフィードバック入力軸62に伝達する。パイロット弁242は、アーティキュレート中心Aに、操作入力軸61とフィードバック入力軸62が、鉛直方向に沿うように配置されており、フィードバック入力軸62に対する操作入力軸61の変位量に応じて、ステアリングシリンダ21、22に供給される油の流量を制御する。ジョイスティックレバー24は、第1スプリング64および第2スプリング65による付勢力に対抗して操作される。
これにより、運転席5aの下方に場積が少ない場合であっても、いわゆるロータリー弁であるパイロット弁242をフロントフレーム11またはアーティキュレート中心Aに配置することができる。
また、上記構成により、ジョイスティックレバー24を操作した後、ジョイスティックレバー24に追従してステアリング角θsが変更し、ジョイスティックレバー24の操作量θinとステアリング角θsが一致するとパイロット弁242は中立位置Npとなる。
また、上記構成により、ジョイスティックレバー24を操作した後、ジョイスティックレバー24に追従してステアリング角θsが変更し、ジョイスティックレバー24の操作量θinとステアリング角θsが一致するとパイロット弁242は中立位置Npとなる。
また、このようにパイロット弁242には第1スプリング64および第2スプリング65が設けられており、オペレータは第1スプリング64および第2スプリング65による付勢力に対抗する操作力でジョイスティックレバー24を操作する。この付勢力に対抗する操作に対して補助力または反力を付与することができる。
[他の実施の形態]
以上、本開示の一実施の形態について説明したが、本開示は上記実施の形態に限定されるものではなく、本開示の要旨を逸脱しない範囲で種々の変更が可能である。
(A)
上記実施の形態3では、パイロット弁242は、フロントフレーム11上に配置されているが、アーティキュレート中心Aに配置されていてもよい。図19に示す構成では、マウントブラケット468は、フロントフレーム11に固定されており、フロントフレーム11からアーティキュレート中心Aまで伸びている。パイロット弁242のハウジング63およびフィードバック入力軸62は、マウントブラケット468に固定されている。
以上、本開示の一実施の形態について説明したが、本開示は上記実施の形態に限定されるものではなく、本開示の要旨を逸脱しない範囲で種々の変更が可能である。
(A)
上記実施の形態3では、パイロット弁242は、フロントフレーム11上に配置されているが、アーティキュレート中心Aに配置されていてもよい。図19に示す構成では、マウントブラケット468は、フロントフレーム11に固定されており、フロントフレーム11からアーティキュレート中心Aまで伸びている。パイロット弁242のハウジング63およびフィードバック入力軸62は、マウントブラケット468に固定されている。
パイロット弁242は、連結軸部13の上側であってアーティキュレート中心A上に配置されている。パイロット弁242は、その中心軸Oがアーティキュレート中心Aと一致するように配置されている。図19では、実施の形態3のリンク機構390に代えて実施の形態2のリンク機構290が設けられている。
このように、アーティキュレート中心A上にパイロット弁242を配置することによって、運転席5aの下方に場積が少ない場合であっても、パイロット弁242を配置することが出来る。
このように、アーティキュレート中心A上にパイロット弁242を配置することによって、運転席5aの下方に場積が少ない場合であっても、パイロット弁242を配置することが出来る。
(B)
上記実施の形態1では、パイロット弁42は、その軸方向Vが、車体の前後方向(図中矢印Yにて示す)に一致するようにフロントフレーム11に固定されているが、これに限らなくても良く、車体の前後方向に対して傾斜していてもよい。
また、特に図示していないが、実施の形態1におけるパイロット弁42も実施の形態2と同様にマウントブラケットを介してフロントフレーム11に固定されていてもよいし、フロントフレーム11に直接固定されていてもよい。また、実施の形態2のパイロット弁242も直接フロントフレームに固定されていてもよい。
上記実施の形態1では、パイロット弁42は、その軸方向Vが、車体の前後方向(図中矢印Yにて示す)に一致するようにフロントフレーム11に固定されているが、これに限らなくても良く、車体の前後方向に対して傾斜していてもよい。
また、特に図示していないが、実施の形態1におけるパイロット弁42も実施の形態2と同様にマウントブラケットを介してフロントフレーム11に固定されていてもよいし、フロントフレーム11に直接固定されていてもよい。また、実施の形態2のパイロット弁242も直接フロントフレームに固定されていてもよい。
(C)
上記実施の形態2では、説明を分かりやすくするため、直線T1と直線T2が垂直な状態のときが中立位置Npとなるようにパイロット弁242は設置されているが、これに限らなくてもよい。
(D)
上記実施の形態では、制御弁の一例であるパイロット弁42から入力されるパイロット圧に応じてステアリング弁32からステアリングシリンダ21、22に供給される油の供給量が制御されるよう構成されていたが、パイロット弁42からの油が直接ステアリングシリンダ21、22に供給される構成であってもよい。
上記実施の形態2では、説明を分かりやすくするため、直線T1と直線T2が垂直な状態のときが中立位置Npとなるようにパイロット弁242は設置されているが、これに限らなくてもよい。
(D)
上記実施の形態では、制御弁の一例であるパイロット弁42から入力されるパイロット圧に応じてステアリング弁32からステアリングシリンダ21、22に供給される油の供給量が制御されるよう構成されていたが、パイロット弁42からの油が直接ステアリングシリンダ21、22に供給される構成であってもよい。
(E)
上記実施の形態2では、第1スプリング64および第2スプリング65の2つのスプリングが設けられていたが、第2スプリング65が設けられていなくてもよい。この場合、例えば、フィードバックスプール73とフィードバックスリーブ74の間は固定されていればよい。
上記実施の形態2では、第1スプリング64および第2スプリング65の2つのスプリングが設けられていたが、第2スプリング65が設けられていなくてもよい。この場合、例えば、フィードバックスプール73とフィードバックスリーブ74の間は固定されていればよい。
(F)
上記実施の形態では、電動モータ111によって力を発生させているが、電動モータに限らず、油圧モータなどであってもよく、要するに付与する力を発生させることができるアクチュエータ等であればよい。
(G)
上記実施の形態では、力付与部27とトルクセンサ103は、ユニバーサルジョイント部83とリンク機構90の間の出力軸84に設けられているが、ユニバーサルジョイント部83とジョイスティックレバー24との間のステアリング操作軸81に配置されてもよい。
上記実施の形態では、電動モータ111によって力を発生させているが、電動モータに限らず、油圧モータなどであってもよく、要するに付与する力を発生させることができるアクチュエータ等であればよい。
(G)
上記実施の形態では、力付与部27とトルクセンサ103は、ユニバーサルジョイント部83とリンク機構90の間の出力軸84に設けられているが、ユニバーサルジョイント部83とジョイスティックレバー24との間のステアリング操作軸81に配置されてもよい。
(H)
上記実施の形態では、ホイールローダ1を作業車両の一例として記載しているが、ホイールローダに限らなくてもよく、アーティキュレート式のダンプトラック、モータグレーダ等であってもよく、アーティキュレート式の作業車両であればよい。
上記実施の形態では、ホイールローダ1を作業車両の一例として記載しているが、ホイールローダに限らなくてもよく、アーティキュレート式のダンプトラック、モータグレーダ等であってもよく、アーティキュレート式の作業車両であればよい。
本発明の作業車両は、弁の設置場所の自由度をあげることが可能な効果を有し、ホイールローダ等として有用である。
1 :ホイールローダ
2 :車体フレーム
3 :作業機
4 :フロントタイヤ
5 :キャブ
5a :運転席
5b :床面
6 :エンジンルーム
7 :リアタイヤ
8 :ステアリング操作装置
11 :フロントフレーム
12 :リアフレーム
13 :連結軸部
14 :ブーム
15 :バケット
16 :リフトシリンダ
17 :バケットシリンダ
18 :ベルクランク
21 :ステアリングシリンダ
21a :伸長ポート
21b :収縮ポート
22 :ステアリングシリンダ
22a :伸長ポート
22b :収縮ポート
23 :ステアリング油圧回路
24 :ジョイスティックレバー
25 :連結部
26 :フィードバックリンク機構
27 :力付与部
28 :制御部
30 :メイン油圧回路
31 :メイン油圧源
32 :ステアリング弁
33 :弁体
34 :第1パイロット室
35 :第2パイロット室
36 :メイン油圧管路
37 :メインドレイン管路
38 :第1ステアリング管路
39 :第2ステアリング管路
40 :パイロット油圧回路
41 :可変減圧部
42 :パイロット弁
43 :パイロット油圧源
44 :パイロット油圧管路
45 :パイロットドレン管路
46 :第1パイロット管路
47 :第2パイロット管路
50 :スリーブ
51 :スプール
51a :連結部材
52 :付勢バネ
60 :弁体部
61 :操作入力軸
62 :フィードバック入力軸
63 :ハウジング
64 :第1スプリング
64a :板バネ部
65 :第2スプリング
65a :板バネ部
66 :フィードバック部
71 :操作スプール
71a :スリット
71ae :壁部
71b :スリット
71be :壁部
71c :孔
71d :孔
72 :操作スリーブ
72c :溝
72d :溝
73 :フィードバックスプール
73a :スリット
73ae :壁部
73b :スリット
73be :壁部
73c :孔
73d :孔
74 :フィードバックスリーブ
74c :溝
74d :溝
75 :ドライブシャフト
76 :第1センタピン
77 :第2センタピン
78 :規制部
80 :ステアリングボックス
81 :ステアリング操作軸
82 :連結バー
83 :ユニバーサルジョイント部
83a :中央部
83b :ジョイント部
83c :ジョイント部
84 :出力軸
84a :レバー側軸部
84b :トルク入力軸部
84b1 :第1端
84b2 :第2端
84c :リンク側軸部
85 :孔
90 :リンク機構
91 :第1アーム部材
92 :回転部材
92a :第2アーム部材
92b :第3アーム部材
93 :第1ロッド部材
94 :第2ロッド部材
95 :支持軸
96 :フォローアップレバー
97 :フォローアップリンク
98 :ブラケット
101 :第1回転角検出部
102 :第2回転角検出部
103 :トルクセンサ
104 :ステアリング角検出部
105 :車速センサ
106 :シリンダストロークセンサ
107 :シリンダストロークセンサ
108 :スプール位置検出センサ
111 :電動モータ
112 :ウォームギア
112a :円筒ウォーム
112b :ウォームホイール
131 :フロントブラケット
132 :リアブラケット
132a :ブラケット部材
133 :センタピン
204 :駆動回路
208 :ステアリング操作装置
242 :パイロット弁
268 :ブラケット
290 :リンク機構
291 :入力レバー部材
308 :ステアリング操作装置
368 :マウントブラケット
390 :リンク機構
391 :入力レバー部材
391a :連結部
468 :マウントブラケット
Lp :左パイロット位置
Ls :左ステアリング位置
Np :中立位置
Ns :中立位置
P1 :メインポンプポート
P2 :メインドレインポート
P3 :第1ステアリングポート
P4 :第2ステアリングポート
P5 :パイロットポンプポート
P6 :パイロットドレンポート
P7 :第1パイロットポート
P8 :第2パイロットポート
Rp :右パイロット位置
Rs :右ステアリング位置
2 :車体フレーム
3 :作業機
4 :フロントタイヤ
5 :キャブ
5a :運転席
5b :床面
6 :エンジンルーム
7 :リアタイヤ
8 :ステアリング操作装置
11 :フロントフレーム
12 :リアフレーム
13 :連結軸部
14 :ブーム
15 :バケット
16 :リフトシリンダ
17 :バケットシリンダ
18 :ベルクランク
21 :ステアリングシリンダ
21a :伸長ポート
21b :収縮ポート
22 :ステアリングシリンダ
22a :伸長ポート
22b :収縮ポート
23 :ステアリング油圧回路
24 :ジョイスティックレバー
25 :連結部
26 :フィードバックリンク機構
27 :力付与部
28 :制御部
30 :メイン油圧回路
31 :メイン油圧源
32 :ステアリング弁
33 :弁体
34 :第1パイロット室
35 :第2パイロット室
36 :メイン油圧管路
37 :メインドレイン管路
38 :第1ステアリング管路
39 :第2ステアリング管路
40 :パイロット油圧回路
41 :可変減圧部
42 :パイロット弁
43 :パイロット油圧源
44 :パイロット油圧管路
45 :パイロットドレン管路
46 :第1パイロット管路
47 :第2パイロット管路
50 :スリーブ
51 :スプール
51a :連結部材
52 :付勢バネ
60 :弁体部
61 :操作入力軸
62 :フィードバック入力軸
63 :ハウジング
64 :第1スプリング
64a :板バネ部
65 :第2スプリング
65a :板バネ部
66 :フィードバック部
71 :操作スプール
71a :スリット
71ae :壁部
71b :スリット
71be :壁部
71c :孔
71d :孔
72 :操作スリーブ
72c :溝
72d :溝
73 :フィードバックスプール
73a :スリット
73ae :壁部
73b :スリット
73be :壁部
73c :孔
73d :孔
74 :フィードバックスリーブ
74c :溝
74d :溝
75 :ドライブシャフト
76 :第1センタピン
77 :第2センタピン
78 :規制部
80 :ステアリングボックス
81 :ステアリング操作軸
82 :連結バー
83 :ユニバーサルジョイント部
83a :中央部
83b :ジョイント部
83c :ジョイント部
84 :出力軸
84a :レバー側軸部
84b :トルク入力軸部
84b1 :第1端
84b2 :第2端
84c :リンク側軸部
85 :孔
90 :リンク機構
91 :第1アーム部材
92 :回転部材
92a :第2アーム部材
92b :第3アーム部材
93 :第1ロッド部材
94 :第2ロッド部材
95 :支持軸
96 :フォローアップレバー
97 :フォローアップリンク
98 :ブラケット
101 :第1回転角検出部
102 :第2回転角検出部
103 :トルクセンサ
104 :ステアリング角検出部
105 :車速センサ
106 :シリンダストロークセンサ
107 :シリンダストロークセンサ
108 :スプール位置検出センサ
111 :電動モータ
112 :ウォームギア
112a :円筒ウォーム
112b :ウォームホイール
131 :フロントブラケット
132 :リアブラケット
132a :ブラケット部材
133 :センタピン
204 :駆動回路
208 :ステアリング操作装置
242 :パイロット弁
268 :ブラケット
290 :リンク機構
291 :入力レバー部材
308 :ステアリング操作装置
368 :マウントブラケット
390 :リンク機構
391 :入力レバー部材
391a :連結部
468 :マウントブラケット
Lp :左パイロット位置
Ls :左ステアリング位置
Np :中立位置
Ns :中立位置
P1 :メインポンプポート
P2 :メインドレインポート
P3 :第1ステアリングポート
P4 :第2ステアリングポート
P5 :パイロットポンプポート
P6 :パイロットドレンポート
P7 :第1パイロットポート
P8 :第2パイロットポート
Rp :右パイロット位置
Rs :右ステアリング位置
Claims (10)
- フロントフレームとリアフレームが連結されたアーティキュレート式の作業車両であって、
油圧によって駆動され前記フロントフレームの前記リアフレームに対するステアリング角を変更する油圧アクチュエータと、
前記油圧アクチュエータに供給される油の流量を制御する制御弁と、
前記リアフレーム上に設けられたキャブ内に配置され、オペレータによって操作されるジョイスティックレバーと、
前記キャブの下側に配置され、前記ジョイスティックレバーの操作を前記制御弁に伝達する第1リンク機構と、
を備えた、
作業車両。 - 前記制御弁は、前記フロントフレームに配置されている、
請求項1に記載の作業車両。 - 前記制御弁から入力されるパイロット圧に基づいて前記油圧アクチュエータに供給される油の流量を調整するステアリング弁を更に備え、
前記制御弁は、前記パイロット圧を調整することにより、前記ステアリング弁から前記油圧アクチュエータに供給される油の流量を制御する、
請求項1に記載の作業車両。 - 前記制御弁は、
前記フロントフレームに配置されており、
軸方向に沿って移動可能なスプールを有し、
前記スプールの移動により、油の流量を制御する、
請求項1に記載の作業車両。 - 駆動源として電動モータを有し、前記ジョイスティックレバーの操作に対して補助力または反力を付与する力付与部を更に備えた、
請求項1に記載の作業車両。 - 前記ジョイスティックレバーと前記第1リンク機構を連結する連結部を更に備え、
前記力付与部は、前記連結部に補助力または反力を伝達する伝達機構を更に有する、
請求項5に記載の作業車両。 - 前記ジョイスティックレバーの操作によって生じるトルクを検出するトルクセンサと、
前記トルクセンサの検出値に基づいて、前記電動モータを制御する制御部と、を更に備えた、
請求項5に記載の作業車両。 - 前記第1リンク機構は、
前記ジョイスティックレバーに連結され前記ジョイスティックレバーの回転操作とともに回転するアーム部材と、
アーティキュレート中心と同軸上に回転可能に配置された回転部材と、
前記アーム部材と前記回転部材とを連結する第1ロッド部材と、
前記回転部材と前記制御弁を連結する第2ロッド部材と、を有する、
請求項1に記載の作業車両。 - 前記制御弁は、
前記第1リンク機構を介して前記ジョイスティックレバーに連結され前記ジョイスティックレバーの操作量に応じて変位する第1入力部材と、
前記フロントフレームに固定された第2入力部材と、
前記第1入力部材の前記第2入力部材に対する変位量がゼロである中立位置になるように前記第1入力部材を付勢する付勢部と、を有し、
前記制御弁は、
前記フロントフレームまたはアーティキュレート中心に、前記第1入力部材と前記第2入力部材が、鉛直方向に沿うように配置されており、
前記第2入力部材に対する前記第1入力部材の変位量に応じて、前記油圧アクチュエータに供給される油の流量を制御し、
前記ジョイスティックレバーは、前記付勢部による付勢力に対抗して操作される、
請求項1に記載の作業車両。 - 前記制御弁は、
前記第1リンク機構を介して前記ジョイスティックレバーに連結され前記ジョイスティックレバーの操作量に応じて変位する第1入力部材と、
前記ステアリング角に応じて変化する第2入力部材と、
前記第1入力部材の前記第2入力部材に対する変位量がゼロである中立位置になるように前記第1入力部材を付勢する付勢部と、を有し、
前記フロントフレームと前記第2入力部材とを連結し、前記ステアリング角の変化を前記第2入力部材に伝達する第2リンク機構を更に備え、
前記制御弁は、
アーティキュレート中心に、前記第1入力部材と前記第2入力部材が、鉛直方向に沿うように配置されており、
前記第2入力部材に対する前記第1入力部材の変位量に応じて、前記油圧アクチュエータに供給される油の流量を制御し、
前記ジョイスティックレバーは、前記付勢部による付勢力に対抗して操作される、
請求項1に記載の作業車両。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17806610.6A EP3406505B1 (en) | 2016-05-31 | 2017-05-29 | Work vehicle |
| US16/080,217 US10865543B2 (en) | 2016-05-31 | 2017-05-29 | Work vehicle |
| CN201780012094.6A CN108698633A (zh) | 2016-05-31 | 2017-05-29 | 作业车辆 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-109164 | 2016-05-31 | ||
| JP2016109164A JP6666795B2 (ja) | 2016-05-31 | 2016-05-31 | 作業車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017209055A1 true WO2017209055A1 (ja) | 2017-12-07 |
Family
ID=60478601
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/019926 WO2017209055A1 (ja) | 2016-05-31 | 2017-05-29 | 作業車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10865543B2 (ja) |
| EP (1) | EP3406505B1 (ja) |
| JP (1) | JP6666795B2 (ja) |
| CN (1) | CN108698633A (ja) |
| WO (1) | WO2017209055A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3988426A4 (en) * | 2019-09-30 | 2023-07-12 | Komatsu Ltd. | VALVE SYSTEM, WORKING MACHINE, VALVE CONTROL METHOD, PROGRAM AND RECORDING MEDIA |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017209058A1 (ja) * | 2016-05-31 | 2017-12-07 | 株式会社小松製作所 | 作業車両および作業車両の制御方法 |
| JP6591509B2 (ja) | 2017-11-06 | 2019-10-16 | 株式会社東芝 | 金型温度異常予兆検知装置及びプログラム |
| JP7212460B2 (ja) * | 2018-06-06 | 2023-01-25 | 株式会社小松製作所 | 作業車両 |
| JP7223526B2 (ja) * | 2018-08-13 | 2023-02-16 | 株式会社小松製作所 | 作業車両 |
| JP7182947B2 (ja) * | 2018-08-13 | 2022-12-05 | 株式会社小松製作所 | ステアリング装置、ステアリングシステム、および作業車両 |
| USD986983S1 (en) * | 2018-12-12 | 2023-05-23 | Bruder Spielwaren Gmbh + Co. Kg | Toy |
| JP7358163B2 (ja) * | 2019-09-30 | 2023-10-10 | 株式会社小松製作所 | 制御システム、作業車両の制御方法、および、作業車両 |
| CA3113334A1 (en) * | 2020-05-06 | 2021-11-06 | Nabors Drilling Technologies Usa, Inc. | Torque measuring tool and method |
| US11745552B2 (en) * | 2021-02-19 | 2023-09-05 | Caterpillar Inc. | System for detecting failure of an articulated steering mechanism |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS469007B1 (ja) * | 1968-05-22 | 1971-03-06 | ||
| JPH01105723A (ja) | 1987-10-19 | 1989-04-24 | Kojima Press Co Ltd | 表皮材付き樹脂成形品の成形方法 |
| JPH01321664A (ja) | 1988-06-23 | 1989-12-27 | Nec Corp | 樹脂封止型半導体装置 |
| JPH11105723A (ja) * | 1997-09-30 | 1999-04-20 | Komatsu Ltd | 油圧式ステアリング装置及びその油圧バルブ |
| JP2004074817A (ja) * | 2002-08-09 | 2004-03-11 | Hitachi Constr Mach Co Ltd | パワーステアリング装置 |
| JP2005082057A (ja) * | 2003-09-10 | 2005-03-31 | Hitachi Unisia Automotive Ltd | 車両の操舵制御装置 |
| JP2006347212A (ja) * | 2005-06-13 | 2006-12-28 | Hitachi Constr Mach Co Ltd | 全油圧式パワーステアリング装置 |
| JP2007185985A (ja) * | 2006-01-11 | 2007-07-26 | Toyota Motor Corp | 車両の操舵装置 |
| JP2008143456A (ja) * | 2006-12-13 | 2008-06-26 | Hitachi Constr Mach Co Ltd | パワーステアリング装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3451498A (en) * | 1967-05-23 | 1969-06-24 | Eaton Yale & Towne | Hydraulic steering control for sharp steering |
| JPS5490726A (en) * | 1977-12-27 | 1979-07-18 | Komatsu Ltd | Straight motion assisting device for construction vehicle |
| FR2565928B1 (fr) * | 1984-06-14 | 1989-12-29 | Elf France | Dispositif d'actionnement manuel en particulier pour une direction de motocycle |
| JP3783189B2 (ja) * | 1998-05-08 | 2006-06-07 | 株式会社小松製作所 | ステアリング操作装置 |
| JP2005205924A (ja) * | 2004-01-20 | 2005-08-04 | Tcm Corp | 産業用車両 |
| JP2007106308A (ja) * | 2005-10-14 | 2007-04-26 | Komatsu Ltd | 油圧式ステアリング装置 |
| JP5498858B2 (ja) * | 2010-05-27 | 2014-05-21 | 日立建機株式会社 | ホイールローダ |
| US20140182277A1 (en) * | 2012-12-27 | 2014-07-03 | Caterpillar Inc. | Electro-Hydraulic Steering System with Spool-Based Steering Event Detection |
| JP6616661B2 (ja) * | 2015-10-30 | 2019-12-04 | 株式会社小松製作所 | 作業車両 |
| CN105599803A (zh) * | 2016-01-27 | 2016-05-25 | 陈焕祥 | 一种载物车板行驶方向操作机构 |
-
2016
- 2016-05-31 JP JP2016109164A patent/JP6666795B2/ja active Active
-
2017
- 2017-05-29 WO PCT/JP2017/019926 patent/WO2017209055A1/ja active Application Filing
- 2017-05-29 EP EP17806610.6A patent/EP3406505B1/en active Active
- 2017-05-29 CN CN201780012094.6A patent/CN108698633A/zh active Pending
- 2017-05-29 US US16/080,217 patent/US10865543B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS469007B1 (ja) * | 1968-05-22 | 1971-03-06 | ||
| JPH01105723A (ja) | 1987-10-19 | 1989-04-24 | Kojima Press Co Ltd | 表皮材付き樹脂成形品の成形方法 |
| JPH01321664A (ja) | 1988-06-23 | 1989-12-27 | Nec Corp | 樹脂封止型半導体装置 |
| JPH11105723A (ja) * | 1997-09-30 | 1999-04-20 | Komatsu Ltd | 油圧式ステアリング装置及びその油圧バルブ |
| JP2004074817A (ja) * | 2002-08-09 | 2004-03-11 | Hitachi Constr Mach Co Ltd | パワーステアリング装置 |
| JP2005082057A (ja) * | 2003-09-10 | 2005-03-31 | Hitachi Unisia Automotive Ltd | 車両の操舵制御装置 |
| JP2006347212A (ja) * | 2005-06-13 | 2006-12-28 | Hitachi Constr Mach Co Ltd | 全油圧式パワーステアリング装置 |
| JP2007185985A (ja) * | 2006-01-11 | 2007-07-26 | Toyota Motor Corp | 車両の操舵装置 |
| JP2008143456A (ja) * | 2006-12-13 | 2008-06-26 | Hitachi Constr Mach Co Ltd | パワーステアリング装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3406505A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3988426A4 (en) * | 2019-09-30 | 2023-07-12 | Komatsu Ltd. | VALVE SYSTEM, WORKING MACHINE, VALVE CONTROL METHOD, PROGRAM AND RECORDING MEDIA |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6666795B2 (ja) | 2020-03-18 |
| EP3406505A1 (en) | 2018-11-28 |
| US10865543B2 (en) | 2020-12-15 |
| EP3406505B1 (en) | 2022-06-15 |
| EP3406505A4 (en) | 2019-10-09 |
| US20190017245A1 (en) | 2019-01-17 |
| JP2017213994A (ja) | 2017-12-07 |
| CN108698633A (zh) | 2018-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017209055A1 (ja) | 作業車両 | |
| JP6578186B2 (ja) | 作業車両および作業車両の制御方法 | |
| JP6817299B2 (ja) | 作業車両および作業車両の制御方法 | |
| JP6716594B2 (ja) | 作業車両および作業車両の制御方法 | |
| JP6616661B2 (ja) | 作業車両 | |
| JP6716595B2 (ja) | 作業車両および作業車両の制御方法 | |
| JP6716593B2 (ja) | 作業車両および作業車両の制御方法 | |
| JP5388461B2 (ja) | ステアリング操作装置 | |
| WO2018038266A1 (ja) | 作業車両および作業車両の制御方法 | |
| JP7022691B2 (ja) | 作業車両および作業車両の制御方法 | |
| WO2019234987A1 (ja) | 作業車両 | |
| WO2019234993A1 (ja) | 作業車両 | |
| WO2019234989A1 (ja) | 作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017806610 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2017806610 Country of ref document: EP Effective date: 20180823 |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17806610 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |