WO2017169203A1 - 制振制御装置及び制振制御方法、並びに移動体 - Google Patents
制振制御装置及び制振制御方法、並びに移動体 Download PDFInfo
- Publication number
- WO2017169203A1 WO2017169203A1 PCT/JP2017/005252 JP2017005252W WO2017169203A1 WO 2017169203 A1 WO2017169203 A1 WO 2017169203A1 JP 2017005252 W JP2017005252 W JP 2017005252W WO 2017169203 A1 WO2017169203 A1 WO 2017169203A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vibration suppression
- vehicle
- vibration
- mode
- moving body
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0164—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input mainly during accelerating or braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
- B60G17/0165—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input to an external condition, e.g. rough road surface, side wind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/06—Characteristics of dampers, e.g. mechanical dampers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/10—Damping action or damper
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/04—Means for informing, instructing or displaying
- B60G2600/042—Monitoring means
- B60G2600/0422—Monitoring means involving data transmission, e.g. via satellite or GPS; for data monitoring, telemetry or platooning purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/20—Manual control or setting means
- B60G2600/202—Manual control or setting means using a remote, e.g. cordless, transmitter or receiver unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/71—Distributed control; Master - slave controllers; Remote control units
Definitions
- the technology disclosed in the present specification relates to a vibration suppression control device and a vibration suppression control method for controlling vibration suppression of a moving body such as a vehicle, and a moving body.
- the passenger compartment becomes a clothing, food and living space similar to the living room at home.
- An object of the technology disclosed in the present specification is to provide a vibration suppression control device and a vibration suppression control method for controlling vibration suppression of a mobile object such as a vehicle, and a mobile object.
- the technology disclosed in the present specification has been made in consideration of the above-mentioned problems, and the first aspect thereof is A vibration control mechanism that controls the moving body in any of a plurality of vibration suppression modes having different degrees of vibration suppression; A control unit for controlling a vibration suppression mode in the vibration suppression mechanism unit according to the state of the moving body; It is the vibration suppression control apparatus which comprises.
- the different vibration suppression modes have different areas for suppressing vibration of the moving body. It is configured as follows.
- the vibration suppression control device further includes a detection unit that detects the state of the moving body including the state of the passenger.
- the said control part is comprised so that switching of a vibration suppression mode may be controlled according to the passenger
- the control unit of the vibration suppression control device has detected that the food and drink are present in the moving body. Accordingly, the vibration control mode is configured to switch to a vibration suppression mode that suppresses vibration more strongly.
- the control unit of the vibration suppression control device has detected that the detection unit has detected that the comfort of the passenger has decreased. Accordingly, it is configured to switch to a vibration suppression mode that suppresses vibration more strongly.
- the vibration suppression control device includes a detection unit that detects a state of the moving body including a state of an object installed in the moving body. Is further provided. And the said control part is comprised so that switching of the vibration suppression mode may be controlled according to the condition of the said object which the said detection part detected.
- control unit of the vibration suppression control device controls the vibration according to a place where the object detected by the detection unit is placed. It is configured to control switching of the vibration mode.
- the control unit of the vibration suppression control device includes an object placed on a predetermined object installed in the moving body.
- the vibration suppression mode is switched to a vibration suppression mode that suppresses vibration more strongly.
- control unit of the vibration suppression control device is configured to be in a vibration suppression mode according to an operation state of a device installed in the moving body. It is configured to control switching.
- the vibration suppression control device further includes a detection unit that detects an operation state of the moving body.
- the said control part is comprised so that switching of the vibration suppression mode may be controlled according to the driving
- the vibration suppression control device further includes a detection unit that detects an ambient environment of the moving body. And the said control part is comprised so that switching of the vibration suppression mode may be controlled according to the surrounding environment which the said detection part detected.
- control unit of the vibration suppression control device is configured to allow a user to select whether to switch a vibration suppression mode. Yes.
- the vibration suppression mode is a mode in which the moving body is set to a low speed or a mode in which the moving body is stopped. At least one of them.
- the vibration suppression control device includes a mode for selecting a route along which the moving body moves as the vibration suppression mode.
- the vibration suppression control device includes a mode in which vibration suppression is not performed as the vibration suppression mode.
- the vibration suppression control device according to the first aspect is configured such that energy consumption differs for each vibration suppression mode.
- the seventeenth aspect of the technology disclosed in this specification is: A damping step for damping the moving body in one of a plurality of damping modes with different degrees of vibration suppression; A control step of controlling a vibration suppression mode in the vibration suppression step according to the state of the moving body; Is a vibration suppression control method.
- the eighteenth aspect of the technology disclosed in this specification is: A drive unit for driving the mobile body; A vibration control mechanism that controls the moving body in any one of a plurality of vibration suppression modes having different degrees of suppressing vibration based on driving by the driving unit; A control unit for controlling a vibration suppression mode in the vibration suppression mechanism unit according to the state of the moving body; It is the moving body which comprises.
- FIG. 1 is a diagram schematically illustrating a configuration example of a vehicle control system 2000 to which the technology disclosed in this specification can be applied.
- FIG. 2 is a flowchart (first half) showing a processing procedure for switching the vibration suppression mode in accordance with the state of the vehicle.
- FIG. 3 is a flowchart (second half) showing a processing procedure for switching the vibration suppression mode in accordance with the state of the vehicle.
- FIG. 4 is a diagram illustrating a configuration example of a GUI screen that notifies switching of the vibration suppression mode.
- FIG. 5 is a diagram illustrating another configuration example of the GUI screen that notifies the switching of the vibration suppression mode.
- FIG. 6 is a diagram illustrating a configuration example of a GUI screen that notifies the setting of the vibration suppression mode.
- FIG. 7 is a diagram showing mode transition of the vibration suppression mode.
- FIG. 1 schematically shows a configuration example of a vehicle control system 2000 to which the technology disclosed in this specification can be applied.
- the illustrated vehicle control system 2000 includes a drive system control unit 2100, a body system control unit 2200, a battery / control unit 2300, an outboard information detection unit 2400, an inboard information detection unit 2500, an integrated control unit 2600, and the like. It consists of the control unit.
- the control units 2100 to 2600 are interconnected via a communication network 2010.
- the communication network 2010 is, for example, an in-vehicle communication network that conforms to an arbitrary communication standard such as CAN (Controller Area Network), LIN (Local Interconnect Network), LAN (Local Area Network), FlexRay (registered trademark), or locally.
- CAN Controller Area Network
- LIN Local Interconnect Network
- LAN Local Area Network
- FlexRay registered trademark
- Each of the control units 2100 to 2600 includes, for example, a microcomputer that performs arithmetic processing according to various programs, a storage unit that stores programs executed by the microcomputer or parameters used for various calculations, and various control objects. And a driving circuit for driving the apparatus.
- Each of the control units 2100 to 2600 includes a network interface (IF) for communicating with other control units via the communication network 2010, and between the devices and sensors inside and outside the vehicle.
- IF network interface
- the drive system control unit 2100 controls the operation of the device related to the drive system of the vehicle according to various programs.
- the drive system control unit 2100 includes a driving force generator for generating a driving force of a vehicle such as an internal combustion engine or a driving motor, a driving force transmission mechanism for transmitting the driving force to wheels, and a steering angle of the vehicle. It functions as a control device such as a steering mechanism that adjusts and a braking device that generates a braking force of the vehicle.
- the drive system control unit 2100 may have a function as a control device such as ABS (Antilock Break System), ESC (Electronic Stability Control), and vehicle vibration control.
- a vehicle state detection unit 2110 and a vibration control mechanism unit 2120 are connected to the drive system control unit 2100.
- the vehicle state detection unit 2110 includes, for example, a gyro sensor that detects the angular velocity of the rotational movement of the vehicle body, an acceleration sensor that detects vehicle acceleration, or an accelerator pedal operation amount, a brake pedal operation amount, steering -At least one of sensors for detecting the steering angle of the wheel, the engine speed, or the rotational speed of the wheel is included.
- the drive system control unit 2100 performs arithmetic processing using a signal input from the vehicle state detection unit 2110, and controls an internal combustion engine, a drive motor, an electric power steering device, a brake device, and the like (all not shown). .
- the vibration damping mechanism 2120 for example, provides a shock absorber in parallel with the spring in the suspension, and damps the relative motion of the upper and lower ends of the spring with the shock absorber, thereby damping the vibration in the pitch direction of the vehicle body.
- the structure of the vibration damping mechanism itself is arbitrary.
- the vibration control mechanism 2120 may also control vibrations not only in the pitch direction of the vehicle body but also in the roll direction and the yaw direction.
- the vibration control mechanism unit 2120 not only controls all of the vehicle body above the traveling unit (chassis), but also separates the traveling unit (chassis) from the vehicle compartment (or an object installed in the vehicle interior). ) May be limited to vibration suppression.
- the vibration suppression mechanism 2120 has a plurality of vibration suppression modes having different levels for suppressing vibration, and the vehicle interior state is in accordance with an instruction from the drive system control unit 2100 (or the microcomputer 2610).
- the vibration suppression mode is adaptively switched according to the above.
- the vibration suppression mechanism unit 2120 may change the level of suppressing vibration in each vibration suppression mode, for example, by making different areas for suppressing vibration in the vehicle body for each vibration suppression mode.
- the performance of suppressing the vibration of the vehicle body is different for each vibration suppression mode, and the energy consumption (fuel consumption, battery consumption, etc.) is different for each vibration suppression mode. Details of these points will be described later.
- the body system control unit 2200 controls the operation of various devices mounted on the vehicle body according to various programs.
- the body system control unit 2200 includes a control device for locking and releasing a door lock such as a keyless entry system and a smart key system, and starting and stopping of the system 2000, a power window device, and various lamps (head lamp, back lamp, brake lamp). (Including a turn signal and a fog lamp) (functions include switching control of a headlamp to a high beam or a low beam).
- a control unit 2200 receives a radio wave transmitted from a portable transmitter incorporated in a key (or substitutes for a key) or signals from various switches, a vehicle door lock device, a power window device, a lamp, etc. Neither is shown in FIG. 1).
- the battery control unit 2300 controls a secondary battery that is a power supply source of the drive motor according to various programs.
- the battery device 2310 including the secondary battery measures the battery temperature, the battery output voltage, the remaining battery capacity, and the like of the secondary battery, and outputs them to the battery control unit 2300.
- the battery control unit 2300 performs arithmetic processing using input information from the battery device 2310, and performs control of a secondary battery temperature adjustment control, a cooling device (not shown) provided in the battery device 2310, and the like.
- the outside information detection unit 2400 detects information outside the vehicle on which the vehicle control system 2000 is mounted.
- the vehicle exterior information detection unit 2400 is connected to at least one of the imaging unit 2410 and the vehicle exterior information detection unit 2420.
- the imaging unit 2410 is a so-called in-vehicle camera and images the surroundings of the vehicle, and includes at least one of a ToF (Time of Flight) camera, a stereo camera, a monocular camera, an infrared camera, and other cameras.
- ToF Time of Flight
- the outside information detection unit 2420 includes, for example, current weather or an environmental sensor for detecting the weather, a surrounding information detection sensor for detecting a surrounding vehicle, an obstacle, a passerby, and a voice sensor (in the vicinity of the vehicle). At least one (none of which is shown) is included.
- the vehicle outside information detection unit 2420 is an audio sensor, it is possible to acquire sound outside the vehicle accompanying an accident or near-miss, such as a horn, a sudden brake, or a collision sound.
- the environmental sensors referred to here are, for example, a raindrop sensor that detects rain, a fog sensor that detects fog, a sunshine sensor that detects sunlight intensity, a snow sensor that detects snowfall, and the like.
- the ambient information detection sensor includes an ultrasonic sensor, a radar device, a LIDAR (Light Detection and Ranging, Laser Imaging Detection and Ranging) device, and the like.
- the imaging unit 2410 and the outside information detection unit 2420 may be configured as independent sensors or devices, or may be configured as a device in which a plurality of sensors or devices are integrated. The details of the installation positions of the imaging unit 2410 and the vehicle outside information detection unit 2420 will be omitted.
- the vehicle outside information detection unit 2400 causes the imaging unit 2410 to capture an image outside the vehicle and receives the captured image data from the imaging unit 2410. In addition, the vehicle exterior information detection unit 2400 receives detection information from the vehicle exterior information detection unit 2420.
- the vehicle exterior information detection unit 2420 is an ultrasonic sensor, a radar device, or a LIDAR device
- the vehicle exterior information detection unit 2400 transmits ultrasonic waves, electromagnetic waves, or the like, and information on reflected waves from the vehicle exterior information detection unit 2420. Receive.
- the vehicle outside information detection unit 2400 is drawn on a road sign (road guidance) installed on the road shoulder of a surrounding person or vehicle, an obstacle, a road, based on the information received from the vehicle outside information detection unit 2420. You may perform the image recognition process which recognizes a road sign etc., the object recognition process which detects or recognizes the object outside a vehicle, and the distance detection process to the object outside a vehicle. Further, the vehicle exterior information detection unit 2400 may perform environment recognition processing for recognizing the surrounding environment such as rain, fog, or road surface conditions based on the information received from the vehicle exterior information detection unit 2420.
- vehicle exterior information detection unit 2400 may perform processing such as distortion correction or alignment on the image data received from the vehicle exterior information detection unit 2420.
- vehicle exterior information detection unit 2400 may generate an overhead image or a panoramic image by combining image data captured by different imaging units 2410. Further, the vehicle exterior information detection unit 2400 may perform viewpoint conversion processing using image data captured by different imaging units 2410.
- the in-vehicle information detection unit 2500 detects in-vehicle information.
- the in-vehicle information detection unit 2500 is connected to, for example, an in-vehicle state detection unit 2510 that detects the state of a driver or other occupant driving the vehicle, and based on the state information input from the in-vehicle state detection unit 2510. Detect information in the car.
- the driver here refers to a passenger sitting in a driver's seat in the vehicle or a passenger stored as a person to be driven by the integrated control unit 2600 among the passengers in the vehicle. .
- the in-vehicle state detection unit 2510 collects the in-vehicle camera (driver monitor camera) that images the interior of the vehicle, a thermo camera, a biological sensor that detects biological information (sweat, body temperature, heart rate, etc.) of the driver or each passenger, and audio in the vehicle.
- a microphone that sounds, a thermometer that measures the temperature and humidity in the vehicle, a hygrometer, an odor sensor, an illuminance sensor, and the like may be included.
- the face included in the image captured by the driver monitor camera can be recognized to authenticate the passenger.
- the biometric sensor is provided on, for example, a seat surface or a steering wheel, and detects biometric information of a driver sitting on the driver's seat or a driver holding the steering wheel.
- the microphone can acquire sound in the passenger compartment accompanying an accident or near-miss, such as horn, sudden braking, or passenger voice (scream).
- the vehicle interior information detection unit 2500 may perform signal processing such as noise canceling on an audio signal collected by a microphone.
- the in-vehicle information detection unit 2500 may modulate a sound other than a specific sound (for example, a driver or a voice registered in advance) for the purpose of privacy protection.
- the vehicle interior state detection unit 2510 includes a load sensor that detects a load applied to the driver's seat and other seats (passenger seat, rear seat, etc.) (whether a person is seated in the seat) and a change in the weight of the passenger compartment. But you can.
- the vehicle interior state detection unit 2510 detects the state of the driver based on operations performed by the driver on various devices such as an accelerator, a brake, a steering wheel, a wiper, a turn signal, an air conditioner, and other switches. May be. Further, the in-vehicle state detection unit 2510 may check a status such as a driver's lack of a driver's license or driving refusal.
- the drive system control unit 2100 (or the microcomputer 2610) adaptively switches the vibration suppression mode of the vibration suppression mechanism unit 2120 in accordance with the vehicle interior state detected by the vehicle interior state detection unit 2510. The details of this point will be given later.
- the integrated control unit 2600 controls the overall operation in the vehicle control system 2000 according to various programs.
- the integrated control unit 2600 includes a microcomputer 2610, a general-purpose communication interface 2620, a dedicated communication interface 2630, a positioning unit 2640, a beacon receiving unit 2650, an in-vehicle device interface 2660, and an audio image.
- An output unit 2670, an in-vehicle network interface 2680, and a storage unit 2690 are provided.
- an input unit 2800 is connected to the integrated control unit 2600.
- the input unit 2800 is configured by a device that can be input by a driver or other passengers, such as a touch panel, a button, a microphone, a switch, and a lever.
- the input unit 2800 may be, for example, a remote control device using infrared rays or other radio waves, or a mobile phone, a PDA (Personal Digital Assistant), a smartphone, a tablet terminal, or the like corresponding to the operation of the vehicle control system 2000.
- the external connection device (both not shown) may be used.
- the input unit 2800 may be a voice input using a microphone.
- the input unit 2800 may be, for example, a camera. In this case, the passenger can input information to the integrated control unit 2600 by a gesture.
- the input unit 2800 may include, for example, an input control circuit that generates an input signal based on information input by the passengers using the input unit 2800 and outputs the input signal to the integrated control unit 2600. Passengers including the driver can input various data and instruct processing operations to the vehicle control system 2000 by operating the input unit 2800.
- the storage unit 2690 includes a RAM (Random Access Memory) that stores various programs executed by the microcomputer, and an EEPROM (ElectricallyErasable and Programmable Read Only Memory) that stores various parameters, calculation results, detection values of sensors, and the like. You may go out.
- the storage unit 2690 is a large-capacity storage device (illustrated) including a magnetic storage device such as an HDD (Hard Disc Drive), a semiconductor storage device such as an SSD (Solid State Drive), an optical storage device, or a magneto-optical storage device. Not included).
- the large-capacity storage device can be used, for example, for recording images (drive recorder) in the vicinity of the vehicle or in the passenger compartment captured by the imaging unit 2410.
- General-purpose communication interface 2620 is a general-purpose communication interface that mediates communication with various devices existing in the external environment.
- the general-purpose communication interface 2620 is a cellular communication protocol such as GSM (registered trademark) (Global System of Mobile communications), WiMAX, LTE (Long Term Evolution) or LTE-A (LTE-Advanced), Wi-Fi (registered trademark), etc.
- GSM Global System of Mobile communications
- WiMAX Wireless LAN
- LTE-A Long Term Evolution-Advanced
- Wi-Fi registered trademark
- Other wireless communication protocols such as wireless LAN and Bluetooth (registered trademark) are implemented.
- the general-purpose communication interface 2620 is, for example, a device (for example, the Internet, a cloud network, or an operator-specific network) that exists on an external network (for example, a base station in cellular communication or an access point in a wireless LAN).
- the general-purpose communication interface 2620 uses, for example, P2P (Peer To Peer) technology to a terminal (for example, an information terminal carried by a driver or a passerby, a store adjacent to a running road). It may be connected to an installed store terminal or an MTC (Machine Type Communication) terminal (such as a home gas meter or vending machine) connected to a communication network without human intervention.
- P2P Peer To Peer
- MTC Machine Type Communication
- the dedicated communication interface 2630 is a communication interface that supports a communication protocol formulated for use in a vehicle.
- the dedicated communication interface 2630 includes, for example, WAVE (Wireless Access in Vehicle Environment) or DSRC (Dedicated Short Range Communication Protocol), which is a combination of the lower layer IEEE 802.11p and the upper layer IEEE 1609, or the DSRC (Dedicated Short Range Communication Protocol). You can do it.
- the dedicated communication interface 2630 typically includes vehicle-to-vehicle communication, vehicle-to-infrastructure communication, vehicle-to-home communication, and vehicle-to-pedestrian communication.
- V2X communication which is a concept including one or more, is performed.
- the positioning unit 2640 receives, for example, a GNSS signal from a GNSS (Global Navigation Satellite System) satellite (for example, a GPS signal from a Global Positioning System (GPS) satellite), performs positioning, and performs latitude, longitude, and altitude of the vehicle.
- the position information including is generated.
- the positioning unit 2640 may specify the current position based on the electric measurement information from the wireless access point using PlaceEngine (registered trademark) or the like, or a mobile phone having a positioning function, PHS (Personal Handy-
- the position information may be acquired from a mobile terminal possessed by the passenger, such as a phone system or a smartphone.
- the beacon receiving unit 2650 receives, for example, radio waves or electromagnetic waves transmitted from a wireless station installed on the road, and acquires the current position of the vehicle and road traffic information (information such as traffic jams, closed roads, and required time). . Note that the function of the beacon receiving unit 2650 can be included in the dedicated communication interface 2630 described above and mounted.
- the in-vehicle device interface 2660 is a communication interface that mediates connections between the microcomputer 2610 and various in-vehicle devices 2760 existing in the vehicle.
- the in-vehicle device interface 2660 may establish a wireless connection using a wireless communication protocol such as a wireless LAN, Bluetooth (registered trademark), NFC (Near Field Communication), or WUSB (Wireless USB (Universal Serial Bus)).
- the in-vehicle device interface 2660 is connected to a wired terminal such as USB, HDMI (registered trademark) (High Definition Multimedia Interface), MHL (Mobile High-definition Link) via a connection terminal (and a cable if necessary).
- a connection may be established.
- the in-vehicle device interface 2660 exchanges a control signal or a data signal with, for example, a mobile device or wearable device possessed by a passenger, or an in-vehicle device 2760 that is carried in or attached to the vehicle.
- the in-vehicle network interface 2680 is an interface that mediates communication between the microcomputer 2610 and the communication network 2010.
- the in-vehicle network interface 2680 transmits and receives signals and the like in accordance with a predetermined protocol supported by the communication network 2010.
- the microcomputer 2610 of the integrated control unit 2600 is acquired via at least one of the general-purpose communication interface 2620, the dedicated communication interface 2630, the positioning unit 2640, the beacon receiving unit 2650, the in-vehicle device interface 2660, and the in-vehicle network interface 2680.
- the vehicle control system 2000 is controlled according to various programs based on the information to be performed.
- the microcomputer 2610 calculates a control target value for the driving force generator, steering mechanism, or braking device based on the acquired information inside and outside the vehicle, and outputs a control command to the drive system control unit 2100. May be.
- the micro computer 2610 may perform cooperative control for the purpose of avoiding collision of the vehicle or mitigating impact, following traveling based on the inter-vehicle distance, vehicle speed maintaining traveling, automatic driving, and the like.
- the micro computer 2610 instructs the vibration suppression mechanism unit 2120 to switch the vibration suppression mode according to the vehicle interior state detected by the vehicle interior state detection unit 2510, the driving state of the vehicle, the surrounding environment, and the like. May be.
- the micro computer 2610 is information acquired via at least one of the general-purpose communication interface 2620, the dedicated communication interface 2630, the positioning unit 2640, the beacon receiving unit 2650, the in-vehicle device interface 2660, and the in-vehicle network interface 2680. Based on the above, local map information including peripheral information of the current position of the vehicle may be created. Further, the micro computer 2610 generates a warning signal by predicting dangers such as a collision of the vehicle, approach of a passerby or a building, and approaching a closed road based on the acquired information. You may do it.
- the warning signal here is, for example, a signal for generating a warning sound or lighting a warning lamp.
- micro computer 2610 may realize the drive recorder function using the storage unit 2690 described above. Specifically, the micro computer 2610 may control the recording of the image around the vehicle and the vehicle interior imaged by the imaging unit 2410.
- the sound image output unit 2670 transmits an output signal of at least one of sound and image to an output device capable of visually or audibly notifying the passenger of the vehicle or the outside of the vehicle.
- the output device is a display device
- the display device can display results obtained by various processes performed by the microcomputer 2610 or information received from other control units in various formats such as text, images, tables, and graphs. Display visually.
- the audio output device converts an audio signal made up of reproduced audio data or acoustic data into an analog signal and outputs it aurally.
- an audio speaker 2710, a display unit 2720, and an instrument panel 2730 are provided as output devices.
- Display unit 2720 may include, for example, at least one of an on-board display or a head-up display.
- a head-up display is a device that uses a windshield to project an image (like an image at an infinite point) into the driver's field of view.
- the display unit 2720 may have an AR (Augmented Reality) display function.
- the vehicle may be provided with headphones, a projector, a lamp, or the like as an output device.
- the display unit 2720 may be a large screen or an omnidirectional display that projects an image on a wall surface (including a window) of a passenger compartment.
- the instrument panel 2730 is arranged in front of the driver's seat (and the passenger seat), and includes a meter panel indicating information necessary for driving the vehicle such as a speedometer, tachometer, fuel gauge, water temperature gauge, and distance meter. Including a navigation system that provides driving guidance to the destination.
- the vehicle control system 2000 shown in FIG. 1 may be physically integrated as one unit. Further, the vehicle control system 2000 may further include a control unit other than that shown in FIG. Alternatively, at least one of the control units 2100 to 2600 may be physically constituted by a group of two or more units. Also, some of the functions that the control units 2100 to 2600 should perform may be realized by other control units. In short, it is allowed to change the configuration of the vehicle control system 2000 as long as the above-described arithmetic processing realized by transmission / reception of information via the communication network 2010 is performed by any control unit. . In addition, a sensor or device connected to any one of the control units may be connected to another control unit, and a plurality of pieces of information detected or acquired by a certain sensor or device may be transmitted via the communication network 2010. The control units may transmit and receive each other.
- Automatic driving can also be defined as a driving mode that autonomously travels to a specified destination while recognizing the surrounding environment of the vehicle using a sensing device such as a radar, LIDAR, GPS, or an in-vehicle camera.
- a sensing device such as a radar, LIDAR, GPS, or an in-vehicle camera.
- the strict definition of automatic driving is not particular.
- the automatic driving may be performed only on a dedicated driving lane or a lane section of an automatic driving vehicle set on an expressway or a general road.
- social infrastructure development it is necessary to relax laws and regulations related to autonomous driving in order to realize autonomous driving of vehicles, but in the following, these problems will be resolved and the introduction of automated driving will begin. It will be described as being done.
- “Relaxing space” can be likened to a passenger's living room or favorite place (frequently used cafe terrace, frequently used park, frequently used library, etc.) for passengers. In such a space, the occupant may be released from the seat belt, sitting in a chair or standing. Passengers are almost unaware that they are in the car, reading books, operating information terminals such as smartphones, watching movies and other content on displays installed in the passenger compartment, and other boarding Sometimes we have conversations and meetings with people. In addition, a table is installed in the passenger compartment, and vases, cups, dishes with dishes are placed on the table, and passengers may have meals or parties. If the vehicle is a camper-like vehicle, it is assumed that the passenger takes a shower, sleeps, and the passenger performs almost all activities in daily life even while driving the vehicle. .
- Definition of Damping Mode Damping control of the vehicle body is indispensable in order to secure the ride comfort of the vehicle and to make the cabin a relaxing space. Damping is equivalent to controlling the relative position and inclination of a damping object such as a vehicle body with respect to the ground contact surface. From the standpoint that relaxation can be realized if only the space in which the passenger gets in can be controlled, it may be separated from the traveling unit (chassis) and only the passenger compartment may be controlled. In addition, vibrations may be limited to objects used by passengers in the passenger compartment, such as information terminals such as smart devices, tables and chairs installed in the passenger compartment, and objects on the table, rather than the entire passenger compartment. Good.
- vibration damping mechanism 2120 a shock absorber is provided in parallel with the spring in the suspension, and the relative motion of the upper and lower ends of the spring is attenuated by the shock absorber.
- vibration suppression mechanism itself is arbitrary.
- vibration control referred to below includes “vibration isolation”.
- damping control of the vehicle body is important to improve the ride comfort.
- the driver cannot perform the driving operation according to the driving condition such as the road surface or the weather, so the vibration suppression control is more important than the manual driving.
- vibration suppression mode 0 no vibration suppression
- vibration suppression mode 1 no vibration suppression
- vibration suppression mode 2 no vibration suppression
- “suppressing vibration” corresponds to controlling the relative position and inclination with respect to the ground plane. Energy consumption increases to suppress vibration. Therefore, it may be possible to control only the passenger compartment separately from the traveling unit (chassis). In addition, energy is controlled by limiting vibration to objects used by passengers in the passenger compartment, not in the entire passenger compartment (information terminals such as smart devices, tables and chairs installed in the passenger compartment, and objects on the table). You may make it suppress consumption.
- the vibration suppression mechanism 2120 does not perform any vibration suppression operation, and the vehicle travels normally (automatic operation or manual operation).
- the vibration suppression mechanism 2120 operates the vehicle body vibration suppression operation.
- the vibration suppression mechanism unit 2120 suppresses vibration more strongly than in the vibration suppression mode 1.
- the vibration suppression mode 2 the vehicle is further driven at a lower speed.
- the braking force of the vehicle is generated in the braking device of the drive system control unit 2100 so that the change in the acceleration of the vehicle body is reduced, or the change in the acceleration of the vehicle body is reduced based on the map information. It is also possible to select an appropriate travel route (for example, route selection avoiding a curve or a slope).
- each vibration suppression mode is not limited to the above, but it should be understood that the level of vibration suppression increases in the order of vibration suppression mode 0, vibration suppression mode 1, and vibration suppression mode 2.
- the vibration suppression area in the vehicle body may be different from each other, and the vibration suppression level in each vibration suppression mode may be changed.
- a “stop mode” is also defined in which the traveling of the vehicle is stopped and the passenger is released from the vibration of the vehicle body.
- FIG. 7 shows a mode transition diagram. For example, every time an event requiring a high level of vibration control occurs, the mode is changed in the order of the vibration suppression mode 1 and the vibration suppression mode 2. If the vibration suppression mode 2 cannot withstand vibration, the stop mode is reached.
- the mode transitions in the order of vibration suppression mode 2 and vibration suppression mode 1.
- the vibration control mode is switched to the vibration suppression mode 0 and the vibration suppression itself is stopped.
- the vibration suppression mode that can suppress vibration more strongly provides better ride comfort and a more relaxed space for passengers.
- the energy consumption in the damping mechanism unit 2120
- an additional charge for each vibration suppression mode may be set to compensate for the increased cost for vibration suppression.
- Table 1 there is no additional charge in vibration suppression mode 0 and stop mode without vibration suppression, an additional charge of 500 yen per 10 kilometers in vibration suppression mode 1, and 800 yen per 10 kilometers in vibration suppression mode 2. Each has an additional charge.
- the vibration suppression mode that can further suppress the vibration suppression mode according to the situation of the vehicle, the ride comfort of the vehicle is better, the passenger compartment becomes more relaxed, and the passenger's satisfaction is improved.
- the energy consumption in the vibration damping mechanism unit 2120, increases correspondingly, resulting in a decrease in fuel consumption and battery consumption.
- the vehicle is always set to the strongest vibration suppression mode, the ride comfort is always secured, but the fuel consumption is reduced and the battery is exhausted. Also, when the road surface is good, or the passenger is seated with the seat belt fastened and there is no need for strong vibration suppression mode, or there is no need for vibration suppression in the first place (for example, If the strong vibration suppression mode is set during forwarding, the fuel consumption is reduced and the battery is consumed. Further, in the rental car, unnecessary additional charges are generated due to unnecessary vibration suppression.
- the vibration suppression mode is adaptively considered in consideration of energy consumption (fuel consumption, battery consumption, etc.) according to various conditions of the vehicle such as in-vehicle conditions, driving conditions of the vehicle, and surrounding environment.
- energy consumption fuel consumption, battery consumption, etc.
- various conditions of the vehicle such as in-vehicle conditions, driving conditions of the vehicle, and surrounding environment.
- the mode is switched to weak vibration suppression mode.
- the strong vibration suppression mode is switched.
- Monitoring objects for controlling the vibration suppression mode are broadly classified into the situation inside the vehicle, the driving situation of the vehicle, and the surrounding environment. Further, the situation in the vehicle to be monitored includes the situation of the passenger, the situation of the object in the car, the situation of the in-vehicle device such as a display installed in the car, and the like. Hereinafter, the control method of the vibration suppression mode will be described for each monitoring target.
- Control of vibration suppression mode according to in-vehicle situation
- in-vehicle camera or thermo camera included in in-vehicle state detection unit 2510 occupant's biological information (sweat, body temperature, heartbeat For example), a load sensor for detecting a load applied to the seat and a change in the weight of the passenger compartment, a thermometer, a hygrometer, an odor sensor, and an illuminance sensor.
- a smartphone possessed by the passenger may transmit information related to the vibration suppression preference to the vehicle side via V2X communication or the like.
- an object in the car is a monitoring target
- the image captured by the car camera is recognized as an object, and objects such as tables, desks, chairs, etc. are installed in the car, or objects are placed on the device. It is possible to detect the presence of the object, and to estimate the size (ground contact area) and weight of the placed object.
- the load sensor can detect changes in the load applied to the seat and the weight of the passenger compartment.
- the illumination sensor can detect changes in the brightness and shadows in the vehicle.
- the operation status of the in-vehicle device may be monitored.
- the vibration control is limited to a specific object such as a chair or table installed in the passenger compartment. May be performed.
- a specific object such as a chair or table installed in the passenger compartment. May be performed.
- the passenger status as listed in Table 2 corresponds to the conditions that trigger the switching of the vehicle vibration suppression mode.
- the correspondence relationship between the passenger situation and the vibration suppression mode may be managed as a database.
- switching of the vibration suppression mode may be controlled according to the place where the object is placed. This is because even if the same object is placed on the floor surface of the passenger compartment, the required level of vibration control differs depending on whether it is placed on a table installed in the vehicle. Further, when an object is placed on a device such as a table installed in the vehicle, the vibration suppression mode may be determined based on the size (ground contact area) and weight of the object.
- vibration control may be performed only for an object that is desired to avoid falling or dropping at least.
- vibration suppression target it is possible to suppress energy consumption compared to the case where all the portions above the traveling unit (chassis) are controlled.
- the situation of objects in the vehicle as listed in Table 3 corresponds to the conditions that trigger the switching of the vibration suppression mode of the vehicle.
- the correspondence relationship between the state of the object in the vehicle and the vibration suppression mode may be managed as a database.
- the display includes, for example, a large screen or omnidirectional display that projects an image on a wall surface (including a window) of a passenger compartment, in addition to a small screen display of about 320 ⁇ 180 pixels that receives one-segment broadcasting.
- the vibration suppression mode may be set according to the motion of the moving image.
- vibration suppression and vibration control may be performed at least on the in-vehicle display.
- vibration suppression target it is possible to suppress energy consumption compared to the case where all the portions above the traveling unit (chassis) are controlled.
- the situation of the in-vehicle display as listed in Table 4 corresponds to a condition that becomes a trigger for switching the vibration suppression mode of the vehicle.
- the correspondence relationship between the state of the in-vehicle display and the vibration suppression mode may be managed as a database.
- a vehicle state detection unit 2110 can be cited. For example, it is possible to determine whether the vehicle is traveling at a high speed or at a low speed based on a detection result such as the engine speed or the rotational speed of the wheel. Further, based on the detection result of the gyro sensor, it can be determined whether or not the vehicle body is shaking. It is also possible to determine whether or not the vehicle is not able to travel smoothly (roads with many curves, rough terrain, etc.) based on the accelerator pedal operation amount, the brake pedal operation amount, and the steering angle of the steering wheel. .
- the level at which the vehicle body is allowed to vibrate (or the level at which vibration suppression is required) differs depending on the driving conditions of these vehicles. Moreover, you may make it receive the information regarding the driving condition of the own vehicle via V2X communication etc. from the outside, such as a surrounding vehicle and a pedestrian who can observe the own vehicle.
- a vehicle used for pick-up such as a taxi
- the following table 5 summarizes examples of vibration suppression mode settings according to the driving conditions of the vehicle.
- the driving status of the vehicle as listed in Table 5 corresponds to a condition that becomes a trigger for switching the vibration suppression mode of the vehicle.
- the correspondence relationship between the driving state of the vehicle and the vibration suppression mode may be managed in a database.
- an imaging unit 2410 such as an in-vehicle camera, an environmental sensor included in the vehicle outside information detection unit 2420, an ambient information detection sensor, and the like.
- the vehicle itself may not collect information on the surrounding environment, but the general-purpose communication interface 2620 may receive information on the surrounding environment from a server on an external network such as the Internet via V2X communication or the like.
- the general-purpose communication interface 2620 may receive information on the surrounding environment from a server on an external network such as the Internet via V2X communication or the like.
- the ambient environment as listed in Table 6 corresponds to a condition that becomes a trigger for switching the vibration suppression mode of the vehicle.
- the correspondence relationship between the surrounding environment and the vibration suppression mode may be managed as a database.
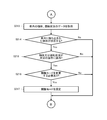
- FIGS. 2 and 3 show a processing procedure for switching the vibration suppression mode in accordance with the state of the vehicle in the form of a flowchart.
- the illustrated processing procedure can be realized, for example, in such a form that the microcomputer 2610 executes a predetermined program code during driving of the vehicle.
- the vibration suppression mode currently set (or the vibration suppression mechanism 2120 is performing) is acquired or confirmed (step S201).
- step S202 it is checked whether there is a passenger in the vehicle interior based on the captured image of the driver monitor camera included in the vehicle interior state detection unit 2510 and the change in the weight of the seat and the vehicle compartment detected by the load sensor (step S202). ).
- step S202 If there is a passenger in the vehicle interior (Yes in step S202), data relating to the vehicle status is acquired from the vehicle interior state detection unit 2510, the imaging unit 2410, the vehicle exterior information detection unit 2420, the vehicle state detection unit 2110, and the like (Ste S203). And the acquired data are analyzed and the condition of a vehicle is estimated (step S204).
- the situation of the vehicle mentioned here includes the situation of the passenger, the situation of the object in the vehicle, the situation of the in-vehicle device, the driving situation of the vehicle, and the surrounding environment of the vehicle.
- the predetermined condition referred to here refers to a condition for damping the vehicle.
- step S205 If the vehicle status does not meet the predetermined condition (No in step S205), the process returns to step S201, and the above processing is repeatedly executed until the vehicle status changes. On the other hand, if the vehicle condition meets the predetermined condition (Yes in step S205), the vibration control mode corresponding to the vehicle condition is determined (step S206).
- the predetermined condition here is a condition that triggers switching the vibration suppression mode.
- the predetermined condition is a condition related to a passenger's situation, a situation of an object in the vehicle, an in-vehicle device, a driving situation of the vehicle, an ambient environment, and the like.
- Information regarding trigger conditions and vibration suppression modes corresponding to the conditions may be managed in a database.
- step S207 it is checked whether or not it is necessary to change from the currently set vibration suppression mode (or the vibration suppression mode acquired in step S201) (step S207).
- the vibration suppression mode When the vibration suppression mode needs to be changed, it is better to change to a higher vibration suppression mode to improve the conditions inside the vehicle or the passenger's comfort, and there is no need to control the vehicle body. There are cases where it is better to reduce the energy consumption by switching to a vibration suppression mode with a low level by getting out of the situation where the car body vibrates.
- step S207 If it is not necessary to change the vibration suppression mode (No in step S207), the process returns to step S201 and the above processing is repeatedly executed until it is necessary to change the vibration suppression mode.
- step S207 if the vibration suppression mode needs to be changed (Yes in step S207), the user is notified of switching of the vibration suppression mode (step S208), and whether or not the user has permitted switching of the vibration suppression mode. Is checked (step S209).
- the user who notifies the switching of the vibration suppression mode and obtains the permission is a vehicle occupant or driver who is affected by the ride comfort.
- the vehicle is a rented vehicle such as a taxi and not only the ride comfort but also the fare increases or decreases by switching the vibration suppression mode, it is necessary to obtain the passenger's permission as a user.
- permission may be obtained from a manager of a vehicle that is remote, not a passenger.
- the notification of switching of the vibration suppression mode is performed, for example, via a GUI (Graphical User Interface) screen.
- GUI Graphic User Interface
- the same notification may be performed by a voice message instead of the GUI, and the user may instruct whether to permit switching of the vibration suppression mode by voice input.
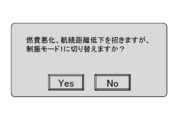
- FIG. 4 shows a configuration example of a GUI screen that notifies the switching of the vibration suppression mode.
- a message “Will the fuel consumption worsen and the cruising range will be reduced, but switch to vibration suppression mode 1?” Is displayed, and the “Yes” button for permitting switching of the control mode and “No” to reject are displayed. "Button is provided.
- FIG. 5 shows another configuration example of the GUI screen that notifies the switching of the vibration suppression mode.
- the vehicle is charged with an additional charge according to the control mode, and the message “Will you pay an additional charge of 800 yen per 10 km, but switch to control mode 1?”
- a “Yes” button for permitting switching of the control mode and a “No” button for rejecting are provided.
- step S209 If the switching of the vibration suppression mode is rejected (eg, “No” button is pressed on the GUI screen shown in FIG. 4 or FIG. 5) (No in step S209), the process returns to step S201 to change the vibration suppression mode.
- the above processing is repeatedly executed until permission is granted.
- Step S210 when switching of the vibration suppression mode is permitted, such as when the “Yes” button is pressed on the GUI screen shown in FIG. 4 or FIG. 5 (Yes in step S209), the permitted vibration suppression mode is set. (Step S210).
- the user may be notified via the GUI screen that the vehicle body has been set to the new vibration suppression mode.
- a vibration mode change request may be received on the GUI screen. For example, if you switch to a higher-level vibration suppression mode, but the user feels that the original low-level vibration suppression mode is sufficient, or you want to switch to a higher-level vibration suppression mode because the ride quality has not improved yet Because there are cases.
- the same notification may be performed by a voice message instead of the GUI, and the user may instruct to change the vibration suppression mode by voice input.
- FIG. 6 shows a configuration example of a GUI screen that notifies the setting of the vibration suppression mode.
- a “Yes” button for instructing to continue the control mode the original vibration suppression mode
- step S210 If the user has not requested to change the vibration suppression mode for the vibration suppression mode set in step S210 (No in step S211), the process returns to step S201 and the above processing is repeatedly executed.
- Step S211 when a vibration control mode change request is received from the user (Yes in step S211), the change is requested to the vibration suppression mode requested (the original vibration suppression mode or a higher (lower) vibration suppression mode). (Step S212). Thereafter, the process returns to step S201, and the above process is repeatedly executed.
- the correspondence between the condition that triggered the switching of the vibration suppression mode in step S206 and the changed vibration suppression mode may be stored or learned. Or you may make it memorize
- step S202 when it is determined in step S202 that there is no passenger in the vehicle interior (No in step S202), the state of the object in the vehicle and the driving state of the vehicle are detected from the in-vehicle state detection unit 2510, the vehicle state detection unit 2110, and the like. The data regarding is acquired (step S213).
- step S214 it is checked whether or not there is an object brought into the vehicle (step S214). If no object brought into the vehicle is detected (No in step S214), the process returns to step S201, and the above processing is repeatedly executed until the vehicle condition changes.
- step S214 If an object brought into the vehicle is detected (Yes in step S214), it is checked whether or not the detected object or the driving state of the vehicle meets a predetermined condition (step S215).
- the predetermined condition referred to here refers to a condition for damping the vehicle.
- the vehicle driving status mentioned here means, for example, whether the vehicle is being picked up or forwarded. If the vehicle is being picked up, vibration control of the vehicle body is necessary to maintain the state of the object placed in the vehicle (settings in the vehicle). On the other hand, if the vehicle is being forwarded, it is not necessary to maintain the state of the object in the vehicle, and therefore, vibration control of the vehicle body is also unnecessary.
- step S215 If the detected object or the driving situation of the vehicle does not meet the predetermined condition (No in step S215), the process returns to step S201 and the above process is repeated until the situation of the vehicle changes.
- the detected state of the detected object or vehicle satisfies the predetermined condition (Yes in step S215), for example, refer to Table 3 and Table 5 or the information corresponding to these tables, and control is performed. It is checked whether or not it is necessary to change the vibration mode (step S216).
- step S216 If it is not necessary to change the vibration suppression mode (No in step S216), the process returns to step S201 and the above processing is repeatedly executed until it is necessary to change the vibration suppression mode.
- step S216 when the vibration suppression mode needs to be changed (Yes in step S216), the vibration suppression mode is changed (step S217). Thereafter, the process returns to step S201, and the above process is repeatedly executed.
- energy consumption fuel consumption, battery consumption, etc.
- various conditions of the vehicle such as the in-vehicle condition, the driving condition of the vehicle, and the surrounding environment.
- the technology disclosed in this specification can be applied to various vehicles such as automobiles (including gasoline cars and diesel cars), electric cars, hybrid electric cars, motorcycles, bicycles, personal mobility, and the like. Furthermore, the technology disclosed in this specification can also be applied to mobile bodies (robots, airplanes, ships, and the like) other than vehicles traveling on a road.
- a vibration suppression control apparatus to which the technology disclosed in this specification is applied is suitable for a vehicle that is driving automatically, taking into account energy consumption (fuel consumption, battery consumption, etc.) according to the conditions inside the vehicle.
- energy consumption fuel consumption, battery consumption, etc.
- the vibration suppression control of the vehicle body can be performed in the vibration mode, it is needless to say that the same vibration suppression control can be performed for the vehicle during manual operation.
- a vibration control mechanism that controls the moving body in any one of a plurality of vibration suppression modes having different degrees of vibration suppression;
- a vibration suppression control device comprising: (2) The plurality of different vibration suppression modes are different from each other in the area for suppressing the vibration of the moving body.
- the control unit switches to a vibration suppression mode that suppresses vibration more strongly in response to the detection unit detecting that food or drink is present in the moving body.
- the control unit switches to a vibration suppression mode that suppresses vibration more strongly in response to the detection unit detecting that the comfort of the passenger has decreased.
- It further comprises a detection unit for detecting the state of the moving body including the state of the object installed in the moving body, The control unit controls switching of a vibration suppression mode according to the state of the object detected by the detection unit;
- the control unit controls switching of the vibration suppression mode according to a place where the object detected by the detection unit is placed.
- the vibration suppression control device according to (6) above.
- the control unit switches to a vibration suppression mode that more strongly suppresses vibration in response to the detection unit detecting that an object is placed on a predetermined object installed in the moving body.
- the vibration suppression control device according to (6) above.
- the control unit controls switching of a vibration suppression mode according to an operation state of a device installed in the moving body.
- the vibration suppression control device according to (1) above.
- the control unit controls switching of the vibration suppression mode according to the surrounding environment detected by the detection unit.
- the control unit causes the user to select whether to switch the vibration suppression mode.
- the vibration suppression mode includes at least one of a mode for slowing down the moving body or a mode for stopping the moving body.
- the vibration suppression mode includes a mode for selecting a route along which the moving body moves.
- the vibration suppression mode includes a mode in which vibration suppression is not performed.
- the vibration suppression control device according to (1) above.
- a moving body comprising: (19) The control unit sets a vibration suppression mode in response to switching being permitted.
- the vibration suppression control device according to (12) above.
- the control unit changes the vibration suppression mode in response to a request from the user to change the vibration suppression mode.
- the vibration suppression mode includes a mode for stopping the moving body.
- the vibration control mechanism unit controls only a part of the moving body, The vibration suppression control device according to (1) above.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Vibration Prevention Devices (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
車両の制振を制御する制振制御装置及び制振制御方法を提供する。 車内の状況や車両の運転状況、周囲環境など車両の状況に応じて、エネルギー消費(燃費やバッテリーの消費量など)を考慮しながら、適応的に制振モードを切り替えて、車体の制振制御を行なうようにする。すなわち、車内の状況や車両の運転状況、周囲環境を常時モニタリングして、現状ほど強い制振を行なう必要がない状況と判断された場合には弱い制振モードに切り替え、逆に、もっと強い制振を行なう必要があると判断された場合には強い制振モードに切り替える。
Description
本明細書で開示する技術は、車両などの移動体の制振を制御する制振制御装置及び制振制御方法、並びに移動体に関する。
車両の自動運転に関する研究が急速に進められている(例えば、特許文献1を参照のこと)。今後の先進安全運転システム(ADAS)のさらなる普及や、運転者が介在不要となる専用走行レーンやレーン区間を導入するなど社会インフラの整備、さらには、運転者を車両制御から切り離すことを許容するなど法規制の緩和などにより、近い将来に完全自動運転する車両が公道に出現することが予想される。
車両制御から完全に切り離された車両の搭乗者にとって、車室は自宅のリビング・ルームと同じような衣食住の空間となる。すなわち、車室内では、単に寛いだり眠ったり、読書したり、搭乗者同士で会話したりするだけでなく、映画やTV番組などのコンテンツを視聴する、ゲームをする、食事やパーティーを行なうなど、車室内ではさまざまな活動を行なうことが想定される。よって、車室は、これらの活動の妨げとならないように、乗り心地のよい(若しくは、乗っていることを感じさせない)、快適な空間であるべきである。
車両の乗り心地を向上させる技術は、さらに古くから研究開発されている。例えば、車体のピッチ方向などの振動を制振する車両制振技術が知られている(例えば、特許文献2を参照のこと)。また、後席乗員の着座姿勢に応じて、抑制すべき振動方向の各々に対する、人体の共振周波数帯域の振動を抑制するための制御量をそれぞれ決定することにより、後席乗員の乗り心地を安定して向上させる車両制御装置について提案がなされている(例えば、特許文献3を参照のこと)。
本明細書で開示する技術の目的は、車両などの移動体の制振を制御する制振制御装置及び制振制御方法、並びに移動体を提供することにある。
本明細書で開示する技術は、上記課題を参酌してなされたものであり、その第1の側面は、
振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する制振制御装置である。
振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する制振制御装置である。
本明細書で開示する技術の第2の側面によれば、第1の側面に係る制振制御装置において、前記異なる複数の制振モードは、前記移動体の振動を制振するエリアが互いに異なるように構成されている。
本明細書で開示する技術の第3の側面によれば、第1の側面に係る制振制御装置は、搭乗者の状況を含む前記移動体の状況を検出する検出部をさらに備えている。そして、前記制御部は、前記検出部が検出した搭乗者の状況に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第4の側面によれば、第3の側面に係る制振制御装置の前記制御部は、前記移動体内に飲食物が存在することを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替えるように構成されている。
本明細書で開示する技術の第5の側面によれば、第3の側面に係る制振制御装置の前記制御部は、搭乗者の快適性が低下したことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替えるように構成されている。
本明細書で開示する技術の第6の側面によれば、第1の側面に係る制振制御装置は、前記移動体内に設置された物体の状況を含む前記移動体の状況を検出する検出部をさらに備えている。そして、前記制御部は、前記検出部が検出した前記物体の状況に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第7の側面によれば、第6の側面に係る制振制御装置の前記制御部は、前記検出部が検出した前記物体の置かれている場所に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第8の側面によれば、第6の側面に係る制振制御装置の前記制御部は、前記移動体内に設置された所定物の上に物が置かれたことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替えるように構成されている。
本明細書で開示する技術の第9の側面によれば、第1の側面に係る制振制御装置の前記制御部は、前記移動体内に設置されたデバイスの動作状況に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第10の側面によれば、第1の側面に係る制振制御装置は、前記移動体の運転状況を検出する検出部をさらに備えている。そして、前記制御部は、前記検出部が検出した運転状況に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第11の側面によれば、第1の側面に係る制振制御装置は、前記移動体の周囲環境を検出する検出部をさらに備えている。そして、前記制御部は、前記検出部が検出した周囲環境に応じて制振モードの切り替えを制御するように構成されている。
本明細書で開示する技術の第12の側面によれば、第1の側面に係る制振制御装置の前記制御部は、制振モードを切り替えるか否かをユーザーに選択させるように構成されている。
本明細書で開示する技術の第13の側面によれば、第1の側面に係る制振制御装置において、前記制振モードは、前記移動体を低速にするモード又は前記移動体を停止するモードのうち少なくとも1つを含んでいる。
本明細書で開示する技術の第14の側面によれば、第1の側面に係る制振制御装置は、前記制振モードとして、前記移動体が移動する経路を選択するモードを含んでいる。
本明細書で開示する技術の第15の側面によれば、第1の側面に係る制振制御装置は、前記制振モードとして、制振を行なわないモードを含んでいる。
本明細書で開示する技術の第16の側面によれば、第1の側面に係る制振制御装置は、制振モード毎にエネルギー消費が異なるように構成されている。
また、本明細書で開示する技術の第17の側面は、
振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振ステップと、
前記移動体の状況に応じて前記制振ステップにおける制振モードを制御する制御ステップと、
を有する制振制御方法である。
振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振ステップと、
前記移動体の状況に応じて前記制振ステップにおける制振モードを制御する制御ステップと、
を有する制振制御方法である。
また、本明細書で開示する技術の第18の側面は、
当該移動体を駆動するための駆動部と、
前記駆動部による駆動に基づく振動を抑制する程度が異なる複数の制振モードのいずれかで前記移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する移動体である。
当該移動体を駆動するための駆動部と、
前記駆動部による駆動に基づく振動を抑制する程度が異なる複数の制振モードのいずれかで前記移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する移動体である。
本明細書で開示する技術によれば、車両などの移動体の制振を制御する制振制御装置及び制振制御方法、並びに移動体を提供することができる。
なお、本明細書に記載された効果は、あくまでも例示であり、本発明の効果はこれに限定されるものではない。また、本発明が、上記の効果以外に、さらに付加的な効果を奏する場合もある。
本明細書で開示する技術のさらに他の目的、特徴や利点は、後述する実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
以下、図面を参照しながら本明細書で開示する技術の実施形態について詳細に説明する。
A.システム構成
図1には、本明細書で開示する技術を適用することができる車両制御システム2000の構成例を模式的に示している。図示の車両制御システム2000は、駆動系制御ユニット2100と、ボディ系制御ユニット2200と、バッテリー・制御ユニット2300と、車外情報検出ユニット2400と、車内情報検出ユニット2500と、統合制御ユニット2600などの複数の制御ユニットで構成されている。
図1には、本明細書で開示する技術を適用することができる車両制御システム2000の構成例を模式的に示している。図示の車両制御システム2000は、駆動系制御ユニット2100と、ボディ系制御ユニット2200と、バッテリー・制御ユニット2300と、車外情報検出ユニット2400と、車内情報検出ユニット2500と、統合制御ユニット2600などの複数の制御ユニットで構成されている。
各制御ユニット2100~2600は、通信ネットワーク2010を介して相互接続されている。通信ネットワーク2010は、例えば、CAN(Controller Area Network)、LIN(Local Interconnect Network)、LAN(Local Area Network)、FlexRay(登録商標)などの任意の通信規格に準拠した車載通信ネットワーク、あるいはローカルに定めた通信規格に準拠したネットワークでよい。
各制御ユニット2100~2600はそれぞれ、例えば、各種プログラムに従って演算処理を行なうマイクロ・コンピューターと、マイクロ・コンピューターにより実行されるプログラム又は各種演算に用いられるパラメーターなどを記憶する記憶部と、各種制御対象の装置を駆動する駆動回路とを備えている。また、各制御ユニット2100~2600は、通信ネットワーク2010を介して他の制御ユニットとの間で通信を行なうためのネットワーク・インターフェース(IF)を備えるとともに、車内外の装置又はセンサーなどとの間で有線通信又は無線通信により通信を行なうための通信インターフェースを備えている。
駆動系制御ユニット2100は、各種プログラムに従って車両の駆動系に関連する装置の動作を制御する。例えば、駆動系制御ユニット2100は、内燃機関や駆動用モーターなどの車両の駆動力を発生させるための駆動力発生装置、駆動力を車輪に伝達するための駆動力伝達機構、車両の舵角を調節するステアリング機構、及び、車両の制動力を発生させる制動装置などの制御装置として機能する。また、駆動系制御ユニット2100は、ABS(Antilock Brake System)やESC(Electronic Stability Control)、車両の制振制御などの制御装置としての機能を備えてもよい。駆動系制御ユニット2100には、車両状態検出部2110と制振機構部2120が接続されている。
車両状態検出部2110には、例えば、車体の軸回転運動の角速度を検出するジャイロ・センサー、車両の加速度を検出する加速度センサー、あるいは、アクセル・ペダルの操作量、ブレーキ・ペダルの操作量、ステアリング・ホイールの操舵角、エンジン回転数又は車輪の回転速度などを検出するためのセンサーのうちの少なくとも1つが含まれる。駆動系制御ユニット2100は、車両状態検出部2110から入力される信号を用いて演算処理を行ない、内燃機関や駆動用モーター、電動パワー・ステアリング装置、ブレーキ装置など(いずれも図示しない)を制御する。
制振機構部2120は、例えば、サスペンションにおいてスプリングとともにショック・アブソーバーを並列に設け、ショック・アブソーバーでスプリングの上下端の相対運動を減衰させることで、車体のピッチ方向などの振動を制振する。但し、本明細書で開示する技術では、制振機構の構造自体は任意である。勿論、制振機構部2120は、車体のピッチ方向だけではなく、ロール方向やヨー方向の振動も併せて制振するようにしてもよい。また、制振機構部2120は、車体のうち走行部(シャシー)より上の部分すべてを制振する以外に、走行部(シャシー)とは分離して車室(若しくは車室内に設置された物体)に限定して制振するようにしてもよい。
本実施形態では、制振機構部2120は、振動を抑制するレベルが異なる複数の制振モードを有しており、駆動系制御ユニット2100(若しくは、マイクロ・コンピューター2610)からの指示に従って、車内状態などに応じて制振モードを適応的に切り替えるようになっている。また、制振機構部2120は、制振モード毎に、車体で振動を抑制するエリアを互いに異ならせるなどして、各制振モードにおいて振動を抑制するレベルを変えるようにしてもよい。制振モード毎に車体の振動を抑制する性能が相違し、また、制振モード毎にエネルギー消費(燃費やバッテリーの消費量など)が相違するが、これらの点の詳細について後述に譲る。
ボディ系制御ユニット2200は、各種プログラムに従って車体に装備された各種装置の動作を制御する。例えば、ボディ系制御ユニット2200は、キーレスエントリーシステムやスマートキーシステムといったドアロックの施錠と解除並びにシステム2000の始動と停止に関する制御装置、パワーウィンドウ装置や各種ランプ(ヘッドランプ、バックランプ、ブレーキ・ランプ、ターンシグナル、フォグランプを含む)の制御装置として機能する(機能として、ヘッドランプのハイビーム又はロービームへの切り替え制御を含むものとする)。ボディ系制御ユニット2200は、鍵に内蔵される(若しくは、鍵を代替する)携帯発信機から送出される電波又は各種スイッチの信号が到来すると、車両のドアロック装置やパワーウィンドウ装置、ランプなど(いずれも図1には図示しない)を制御する。
バッテリー制御ユニット2300は、各種プログラムに従って駆動用モーターの電力供給源である二次電池を制御する。例えば、バッテリー制御ユニット2300には、二次電池を備えたバッテリー装置2310は、二次電池のバッテリー温度やバッテリー出力電圧、バッテリーの残存容量などを計測して、バッテリー制御ユニット2300に出力する。バッテリー制御ユニット2300は、バッテリー装置2310からの入力情報を用いて演算処理を行ない、二次電池の温度調節制御やバッテリー装置2310に備えられた冷却装置(図示しない)などの制御を実施する。
車外情報検出ユニット2400は、車両制御システム2000を搭載した車両の外部の情報を検出する。例えば、車外情報検出ユニット2400には、撮像部2410及び車外情報検出部2420のうちの少なくとも一方が接続されている。
撮像部2410は、いわゆる車載カメラであり、車両の周囲を撮像するが、ToF(Time of Flight)カメラ、ステレオカメラ、単眼カメラ、赤外線カメラ又はその他のカメラのうちの少なくとも1つが含まれる。
車外情報検出部2420には、例えば、現在の天候又は気象を検出するための環境センサーや、周辺車両や障害物、通行人などを検出するための周囲情報検出センサー、音声センサー(車両の周辺で発生する音声を集音するマイク)のうちの少なくとも1つ(いずれも図示しない)が含まれる。車外情報検出部2420が音声センサーの場合、クラクションや急ブレーキ、衝突音など、事故やヒヤリハットに伴う車外の音を取得することができる。
ここで言う環境センサーは、例えば、雨天を検出する雨滴センサー、霧を検出する霧センサー、日照度合いを検出する日照センサー、降雪を検出する雪センサーなどである。また、周囲情報検出センサーは、超音波センサーやレーダー装置、LIDAR(Light Detection and Ranging、Laser Imaging Detection and Ranging)装置などで構成される。
これらの撮像部2410及び車外情報検出部2420は、それぞれ独立したセンサー乃至装置として構成してもよいし、複数のセンサー乃至装置が統合された装置として構成してもよい。撮像部2410及び車外情報検出部2420の設置位置の詳細については、説明を省略する。
車外情報検出ユニット2400は、撮像部2410に車外の画像を撮像させるとともに、撮像された画像データを撮像部2410から受信する。また、車外情報検出ユニット2400は、車外情報検出部2420から検出情報を受信する。車外情報検出部2420が超音波センサー、レーダー装置、又はLIDAR装置である場合には、車外情報検出ユニット2400は、超音波又は電磁波などを発信させるとともに、車外情報検出部2420からの反射波の情報を受信する。
車外情報検出ユニット2400は、車外情報検出部2420から受信した情報に基づいて、周囲の人や車両、障害物、道路の路肩に設置された道路標識(道路案内)、道路の路面に描かれた道路標識などを認識する画像認識処理や、車外の物体を検出又は認識する物体認識処理、車外の物体までの距離検出処理を行なってもよい。また、車外情報検出ユニット2400は、車外情報検出部2420から受信した情報に基づいて、降雨、霧、又は路面の状態などの周囲環境を認識する環境認識処理を行なってもよい。
なお、車外情報検出ユニット2400は、車外情報検出部2420から受信した画像データに対して歪み補正又は位置合わせなどの処理を行なうようにしてもよい。また、車外情報検出ユニット2400は、異なる撮像部2410により撮像された画像データを合成して俯瞰画像又はパノラマ画像を生成するようにしてもよい。また、車外情報検出ユニット2400は、異なる撮像部2410により撮像された画像データを用いて、視点変換処理を行なうようにしてもよい。
車内情報検出ユニット2500は、車内の情報を検出する。車内情報検出ユニット2500には、例えば、車両を運転するドライバーや他の搭乗者の状態を検出する車内状態検出部2510が接続されており、車内状態検出部2510から入力される状態情報に基づいて、車内の情報を検出する。ここで言うドライバーとは、車内にいる搭乗者のうち、車内の運転席に座っている搭乗者、あるいは、統合制御ユニット2600が運転を行なうべき人物として記憶している搭乗者を指すものとする。
車内状態検出部2510は、車内を撮像する車載カメラ(ドライバーモニターカメラ)や、サーモカメラ、ドライバー若しくは各搭乗者の生体情報(発汗、体温、心拍など)を検出する生体センサー、車内の音声を集音するマイク、車内の気温や湿度を計測する温度計、湿度計、匂いセンサー、照度センサーなどを含んでもよい。ドライバーモニターカメラの撮像画像内に含まれる顔を認識して、搭乗者を顔認証することができる。また、認識された顔の向く方向や認識された顔に含まれる眼の動きに基づいて、ドライバーや他の搭乗者の注視点(若しくは視線方向)を検出することができる。生体センサーは、例えば、座面又はステアリング・ホイールなどに設けられ、運転席に座ったドライバーやステアリング・ホイールを握るドライバーの生体情報を検出する。また、マイクは、クラクションや急ブレーキ、搭乗者の音声(悲鳴)など、事故やヒヤリハットに伴う車室内の音を取得することができる。車内情報検出ユニット2500は、マイクで集音された音声信号に対してノイズ・キャンセリングなどの信号処理を行なうようにしてもよい。車内情報検出ユニット2500は、プライバシー保護などの目的で、特定の音声(例えば、ドライバーや事前に登録した声)以外の音声に変調をかけてもよい。
また、車内状態検出部2510は、運転席やその他の座席(助手席、後部座席など)に加わる荷重(座席に人が座ったか否か)や車室の重量の変化を検出する荷重センサーを含んでもよい。また、車内状態検出部2510は、アクセルやブレーキ、ステアリング、ワイパー、ターンシグナル、エアコン、その他のスイッチなど、ドライバーが車両を操作するさまざまなデバイスに対する操作に基づいて、ドライバーの状態を検出するようにしてもよい。また、車内状態検出部2510は、ドライバーの運転免許証不所持や運転拒否といったステータスのチェックを行なうようにしてもよい。
本実施形態では、車内状態検出部2510で検出される車内状態などに応じて、駆動系制御ユニット2100(若しくは、マイクロ・コンピューター2610)が制振機構部2120の制振モードを適応的に切り替えるようになっているが、この点の詳細については後述に譲る。
統合制御ユニット2600は、各種プログラムに従って車両制御システム2000内の動作全般を制御する。図1に示す例では、統合制御ユニット2600は、マイクロ・コンピューター2610と、汎用通信インターフェース2620と、専用通信インターフェース2630と、測位部2640と、ビーコン受信部2650と、車内機器インターフェース2660と、音声画像出力部2670と、車載ネットワーク・インターフェース2680と、記憶部2690を備えている。また、統合制御ユニット2600には、入力部2800が接続されている。
入力部2800は、例えば、タッチパネルやボタン、マイクロフォン、スイッチ、レバーなど、ドライバーやその他の搭乗者によって入力操作され得る装置で構成される。入力部2800は、例えば、赤外線又はその他の電波を利用したリモート・コントロール装置であってもよいし、車両制御システム2000の操作に対応した携帯電話機やPDA(Personal Digital Assistant)、スマートフォン、タブレット端末などの外部接続機器(いずれも図示しない)であってもよい。入力部2800はマイクによる音声入力でもよい。入力部2800は、例えばカメラであってもよく、その場合、搭乗者はジェスチャーにより統合制御ユニット2600に情報を入力することができる。さらに、入力部2800は、例えば、上記の入力部2800を用いて搭乗者らにより入力された情報に基づいて入力信号を生成し、統合制御ユニット2600に出力する入力制御回路などを含んでもよい。ドライバーを始めとする搭乗者らは、この入力部2800を操作することにより、車両制御システム2000に対して各種のデータを入力したり処理動作を指示したりすることができる。
記憶部2690は、マイクロ・コンピューターにより実行される各種プログラムを記憶するRAM(Random Access Memory)、及び各種パラメーター、演算結果やンサーの検出値などを記憶するEEPROM(ElectricallyErasable and Programmable Read Only Memory)を含んでいてもよい。また、記憶部2690は、HDD(Hard Disc Drive)などの磁気記憶デバイスやSSD(Solid State Drive)などの半導体記憶デバイス、光記憶デバイス又は光磁気記憶デバイスなどで構成される大容量記憶装置(図示しない)を含んでもよい。大容量記憶装置は、例えば、撮像部2410で撮像した車両周辺や車室内の映像の記録(ドライブ・レコーダー)に利用することができる。
汎用通信インターフェース2620は、外部環境に存在するさまざまな機器との間の通信を仲介する汎用的な通信インターフェースである。汎用通信インターフェース2620は、GSM(登録商標)(Global System of Mobile communications)、WiMAX、LTE(Long Term Evolution)若しくはLTE-A(LTE-Advanced)などのセルラー通信プロトコル、Wi-Fi(登録商標)などの無線LAN、Bluetooth(登録商標)などのその他の無線通信プロトコルを実装している。汎用通信インターフェース2620は、例えば、セルラー通信における基地局や無線LANにおけるアクセスポイントなどを介して、外部ネットワーク(例えば、インターネット、クラウド・ネットワーク、又は事業者固有のネットワーク)上に存在する機器(例えば、アプリケーション・サーバー又は制御サーバー、管理サーバーなど)へ接続することができる。また、汎用通信インターフェース2620は、例えばP2P(Peer To Peer)技術を用いて、当該車両の近傍に存在する端末(例えば、ドライバーや通行人が携帯する情報端末、走行中の道路に隣接する店舗に設置された店舗端末、人間の介在なしに通信ネットワークに接続するMTC(Machine Type Communication)端末(家庭用ガスのメーターや自動販売機など)など)と接続してもよい。
専用通信インターフェース2630は、車両における使用を目的として策定された通信プロトコルをサポートする通信インターフェースである。専用通信インターフェース2630は、例えば、下位レイヤのIEEE802.11pと上位レイヤのIEEE1609との組合せであるWAVE(Wireless Access in Vehicle Environment)、又はDSRC(Dedicated Short Range Communications)、セルラー通信プロトコルといった標準プロトコルを実装してよい。専用通信インターフェース2630は、典型的には、車車間(Vehicle to Vehicle)通信、路車間(Vehicle to Infrastructure)通信、車と家の間(Vehicleto Home)及び歩車間(Vehicle to Pedestrian)通信のうちの1つ以上を含む概念であるV2X通信を遂行する。
測位部2640は、例えば、GNSS(Global Navigation Satellite System)衛星からのGNSS信号(例えば、GPS(Global Positioning System)衛星からのGPS信号)を受信して測位を実行し、車両の緯度、経度及び高度を含む位置情報を生成する。なお、測位部2640は、PlaceEngine(登録商標)などを利用して無線アクセスポイントからの電測情報に基づいて現在位置を特定してもよく、又は測位機能を有する携帯電話機、PHS(Personal Handy-phone System)若しくはスマートフォンといった搭乗者が所持する携帯端末から位置情報を取得するようにしてもよい。
ビーコン受信部2650は、例えば、道路上に設置された無線局などから発信される電波又は電磁波を受信し、車両の現在位置や道路交通情報(渋滞、通行止め、所要時間などの情報)を取得する。なお、ビーコン受信部2650の機能を、上述した専用通信インターフェース2630に含めて実装することも可能である。
車内機器インターフェース2660は、マイクロ・コンピューター2610と車内に存在するさまざまな車内機器2760との間の接続を仲介する通信インターフェースである。車内機器インターフェース2660は、無線LAN、Bluetooth(登録商標)、NFC(Near Field Communication)、又はWUSB(Wireless USB(Universal Serial Bus))といった無線通信プロトコルを用いて無線接続を確立してもよい。また、車内機器インターフェース2660は、図示しない接続端子(及び、必要であればケーブル)を介して、USB、HDMI(登録商標)(High Definition Multimedia Interface)、MHL(Mobile High-definition Link)などの有線接続を確立してもよい。車内機器インターフェース2660は、例えば、搭乗者が所持するモバイル機器やウェアラブル機器、又は車両に搬入され若しくは取り付けられる車内機器2760との間で、制御信号又はデータ信号を交換する。
車載ネットワーク・インターフェース2680は、マイクロ・コンピューター2610と通信ネットワーク2010との間の通信を仲介するインターフェースである。車載ネットワーク・インターフェース2680は、通信ネットワーク2010によりサポートされる所定のプロトコルに則して、信号などを送受信する。
統合制御ユニット2600のマイクロ・コンピューター2610は、汎用通信インターフェース2620、専用通信インターフェース2630、測位部2640、ビーコン受信部2650、車内機器インターフェース2660、車載ネットワーク・インターフェース2680のうちの少なくとも1つを介して取得される情報に基づいて、各種プログラムに従って、車両制御システム2000を制御する。
例えば、マイクロ・コンピューター2610は、取得される車内外の情報に基づいて、駆動力発生装置、ステアリング機構又は制動装置の制御目標値を演算し、駆動系制御ユニット2100に対して制御指令を出力してもよい。例えば、マイクロ・コンピューター2610は、車両の衝突回避あるいは衝撃緩和、車間距離に基づく追従走行、車速維持走行、自動運転などを目的とした協調制御を行なうようにしてもよい。また、マイクロ・コンピューター2610は、車内状態検出部2510で検出される車内状態や車両の運転状況、周囲環境などに応じて、制振機構部2120に対して制振モードの切り替えを指示するようにしてもよい。
また、マイクロ・コンピューター2610は、汎用通信インターフェース2620、専用通信インターフェース2630、測位部2640、ビーコン受信部2650、車内機器インターフェース2660及び車載ネットワーク・インターフェース2680のうちの少なくとも1つを介して取得される情報に基づいて、当該車両の現在位置の周辺情報を含むローカル地図情報を作成するようにしてもよい。また、マイクロ・コンピューター2610は、取得される情報に基づいて、当該車両の衝突、通行人や建造物などの接近、通行止めの道路への進入などの危険を予測して、警告用信号を生成するようにしてもよい。ここで言う警告用信号は、例えば、警告音を発生させたり、警告ランプを点灯させたりするための信号である。
また、マイクロ・コンピューター2610は、上述した記憶部2690などを利用して、ドライブ・レコーダー機能を実現するようにしてもよい。具体的には、マイクロ・コンピューター2610は、撮像部2410で撮像した車両周辺や車室内の映像の記録の制御を行なうようにしてもよい。
音声画像出力部2670は、当該車両の搭乗者又は車外に対して、視覚的又は聴覚的に情報を通知することが可能な出力装置へ音声及び画像のうちの少なくとも一方の出力信号を送信する。出力装置が表示装置の場合、表示装置は、マイクロ・コンピューター2610が行なった各種処理により得られた結果又は他の制御ユニットから受信された情報を、テキスト、イメージ、表、グラフなどさまざまな形式で視覚的に表示する。また、出力装置が音声出力装置の場合、音声出力装置は、再生された音声データ又は音響データなどからなるオーディオ信号をアナログ信号に変換して聴覚的に出力する。図1に示す例では、出力装置として、オーディオ・スピーカー2710、表示部2720、並びにインストルメント・パネル2730が装備されている。
表示部2720は、例えば、オンボード・ディスプレイ又はヘッド・アップ・ディスプレイの少なくとも1つを含んでいてもよい。ヘッド・アップ・ディスプレイは、フロントガラスを利用してドライバーの視野に(無限遠の点に結像するような)画像を映し出すデバイスである。表示部2720は、AR(Augmented Reality)表示機能を備えていてもよい。上述した以外にも、ヘッドホン、プロジェクター又はランプなどを出力装置として車両に備えていてもよい。あるいは、表示部2720は、車室の壁面(ウィンドウを含む)に映像を投影する大画面若しくは全天球ディスプレイであってもよい。
また、インストルメント・パネル2730は、運転席(並びに助手席)の正面に配置され、スピードメーターやタコメーター、燃料計、水温計、距離計といった自動車の走行に必要な情報を指し示すメーター・パネルや、目的地までの走行案内を行なうナビゲーション・システムを含む。
なお、図1に示した車両制御システム2000を構成する複数の制御ユニットのうち少なくとも2つの制御ユニットを物理的に1つのユニットとして一体化して構成してもよい。また、車両制御システム2000が図1に示した以外の制御ユニットをさらに備えていてもよい。あるいは、制御ユニット2100~2600のうち少なくとも1つを物理的には2以上のユニットの集まりで構成してもよい。また、制御ユニット2100~2600が担うべき機能のうち一部を他の制御ユニットで実現するようにしてもよい。要するに、通信ネットワーク2010を介した情報の送受信によって実現される上記の演算処理がいずれかの制御ユニットで行なわれるように構成されていれば、車両制御システム2000の構成を変更することが許容される。また、いずれかの制御ユニットに接続されているセンサーや装置類が他の制御ユニットにも接続されていてもよく、あるセンサー又は装置で検出若しくは取得された情報を、通信ネットワーク2010を介して複数の制御ユニット間で相互に送受信するようにしてもよい。
B.自動運転について
本実施形態では、上記の車両制御システム2000の制御下にある車両は、自動運転が可能であるとする。自動運転は、レーダーやLIDAR、GPS、車載カメラなどのセンシング・デバイスを用いて車両の周囲環境を認識しながら、指定した目的地まで自律的に走行する運転モードと定義することもできる。但し、以下の説明では、自動運転の厳密な定義にはこだわらないものとする。また、自動運転は、高速道路や、一般道に設定された自動運転車両の専用走行レーンやレーン区間に限定して実施されるものであってもよい。また、車両の自動運転の実現には、社会インフラの整備に加えて、自動運転に関連する法規制の緩和も必要であるが、以下では、これらの問題が解消して自動運転の導入が開始されたものとして説明する。
本実施形態では、上記の車両制御システム2000の制御下にある車両は、自動運転が可能であるとする。自動運転は、レーダーやLIDAR、GPS、車載カメラなどのセンシング・デバイスを用いて車両の周囲環境を認識しながら、指定した目的地まで自律的に走行する運転モードと定義することもできる。但し、以下の説明では、自動運転の厳密な定義にはこだわらないものとする。また、自動運転は、高速道路や、一般道に設定された自動運転車両の専用走行レーンやレーン区間に限定して実施されるものであってもよい。また、車両の自動運転の実現には、社会インフラの整備に加えて、自動運転に関連する法規制の緩和も必要であるが、以下では、これらの問題が解消して自動運転の導入が開始されたものとして説明する。
車両が自動運転を行なう期間中、運転操作から解放されたドライバーやその他の搭乗者にとって、乗り心地が良く、車室がリラックスできる空間であることが望ましい。勿論、手動運転中の車両やタクシーのような賃走車であっても、搭乗者にとって乗り心地が良く、車室がリラックスできる空間が好ましいことは同様である。
「リラックスできる空間」とは、車室が搭乗者にとって自宅のリビング・ルームやお気に入りの場所(よく利用するカフェテラスや、よく行く公園、頻繁に利用する図書館など)に喩えることができる。搭乗者は、このような空間では、シートベルトから解き放たれ、椅子に座っていることもあれば立っていることもある。搭乗者は、車中であることをほとんど意識せずに、読書したり、スマートフォンなどの情報端末を操作したり、車室内に設置されたディスプレイで映画などのコンテンツを鑑賞したり、他の搭乗者と会話や会議をしたりすることもある。また、車室内には、テーブルが設置され、テーブル上には花瓶やコップ、料理が盛られた皿が置かれ、搭乗者が食事やパーティーをしていることもある。また、車両がキャンピングカーのような車両であれば、シャワーを浴びたり、睡眠をとったり、搭乗者は、車両の運転中も、日常生活上のほとんどすべての行動を車室で行なうことが想定される。
C.車体の制振制御
C-1.制振モードの定義
車両の乗り心地を担保し、車室をリラックスできる空間にするには、車体の制振制御が不可欠である。制振は、車体などの制振対象の接地面に対する相対的な位置及び傾きを制御することに相当する。搭乗者が乗車する空間だけ制振できればリラクゼーションを実現できるという観点から、走行部(シャシー)とは分離して、車室だけを制振するようにしてもよい。また、車室全体ではなく、車室内で搭乗者が使用する物体(スマートなどの情報端末、車室に設置されたテーブルや椅子、テーブル上の物)に限定して制振するようにしてもよい。
C-1.制振モードの定義
車両の乗り心地を担保し、車室をリラックスできる空間にするには、車体の制振制御が不可欠である。制振は、車体などの制振対象の接地面に対する相対的な位置及び傾きを制御することに相当する。搭乗者が乗車する空間だけ制振できればリラクゼーションを実現できるという観点から、走行部(シャシー)とは分離して、車室だけを制振するようにしてもよい。また、車室全体ではなく、車室内で搭乗者が使用する物体(スマートなどの情報端末、車室に設置されたテーブルや椅子、テーブル上の物)に限定して制振するようにしてもよい。
例えば、制振機構部2120として、サスペンションにおいてスプリングとともにショック・アブソーバーを並列に設け、ショック・アブソーバーでスプリングの上下端の相対運動を減衰させることで実現する。但し、本明細書で開示する技術では、制振のメカニズム自体は任意である。また、以下で言う「制振」は「免振」も含むものとする。
車両が自動運転又は手動運転のいずれの運転モードであっても、乗り心地をよくするには、車体の制振制御が重要である。但し、自動運転モード下では、路面や天候など運転状況に応じてドライバーが運転操作を行なえる訳ではないので、手動運転時よりも制振制御がさらに重要である。
本実施形態では、以下の表1に示すように、「制振モード0(制振なし)」、「制振モード1」、「制振モード2」という3種類の制振モードを定義している。

上記の表1中、「振動を抑制」するとは、接地面に対する相対的な位置及び傾きを制御することに相当する。振動を抑制するにはエネルギー消費が増大する。そこで、走行部(シャシー)とは分離して、車室だけを制振するようにしてもよい。また、車室全体ではなく、車室内で搭乗者が使用する物体(スマートなどの情報端末、車室に設置されたテーブルや椅子、テーブル上の物)に限定して制振することによって、エネルギー消費を抑えるようにしてもよい。
制振モード0では、制振機構部2120は何ら制振の動作を行なわず、車両が通常走行(自動運転又は手動運転)を行なう。制振モード1では、制振機構部2120が車体の制振動作を稼働させる。制振モード2では、制振機構部2120は、制振モード1よりも強く振動を抑制する。自動運転の場合には、制振モード2では、さらに低速走行にする。また、制振モード2では、車体の加速度の変化が小さくなるように駆動系制御ユニット2100の制動装置に車両の制動力を発生させたり、地図情報に基づいて車体の加速度の変化が小さくなるような走行経路の選択(例えば、カーブや坂道を避けた経路選択)を行なったりするようにしてもよい。
各制振モードの厳密な定義は上記には限定されないが、制振モード0、制振モード1、制振モード2の順で振動を抑制するレベルが高くなる、という点を理解されたい。例えば、制振モード毎に、車体で振動を抑制するエリアを互いに異ならせるようにして、各制振モードにおいて振動を抑制するレベルを変えるようにしてもよい。
また、最も強い制振モードを適用しても、所望する乗り心地で、車室をリラックスできる空間にすることが不可能な場合のために、走行の継続や目的地への到達を諦めて、車両の走行を停止して搭乗者を車体の振動から解放する「停止モード」も定義しておく。図7には、モード遷移図を示した。例えば、レベルの高い制振が要求される事象が発生する度に、制振モード1、制振モード2の順にモード遷移させ、制振モード2でも振動に耐えられなくなると、停止モードに達する。一方、振動が鎮まって、停止せずに再び走行が可能になり、あるいはレベルの低い制振でも乗り心地を得ることができるようになると、制振モード2、制振モード1の順にモード遷移させ、振動がほぼなくなり又は精神が不要になると、制振モード0に移行して制振自体を停止する。なお、制振モード2と停止モードの間に、さらに制振モード2よりも振動をより強く抑制する制振モード3、制振モード4、…を定義してもよい。
振動をより強く抑制できる制振モードほど、車両の乗り心地はよく、車室はよりリラックスできる空間となり、搭乗者の満足度は向上する。しかしながら、振動をより強く抑制には、その分だけ(制振機構部2120における)エネルギー消費が増大し、燃費の低下やバッテリーの消耗を招来し、走行のためのコストが増大する。
タクシーやリムジンなどの貸走中の車両の場合には、制振のために増大したコストを補填するために、制振モード毎の追加料金を設定するようにしてもよい。表1に示した例では、制振を行なわない制振モード0及び停止モードでは追加料金なし、制振モード1では10キロメートル当たり500円の追加料金、制振モード2では10キロメートル当たり800円の追加料金をそれぞれ設定している。
C-2.車両の状況に応じた制振モード
振動をより強く抑制できる制振モードほど、車両の乗り心地はよく、車室はよりリラックスできる空間となり、搭乗者の満足度は向上する。しかしながら、振動をより強く抑制には、その分だけ(制振機構部2120における)エネルギー消費が増大し、燃費の低下やバッテリーの消耗を招来する。
振動をより強く抑制できる制振モードほど、車両の乗り心地はよく、車室はよりリラックスできる空間となり、搭乗者の満足度は向上する。しかしながら、振動をより強く抑制には、その分だけ(制振機構部2120における)エネルギー消費が増大し、燃費の低下やバッテリーの消耗を招来する。
車両を常に最も強い制振モードに設定していると、乗り心地は常に担保されるが燃費の低下やバッテリーの消耗が激しくなる。また、路面が良好であり、又は搭乗者がシートベルトを締めて座席に座っていて、強い制振モードにする必要がないときや、搭乗者がおらずそもそも制振する必要がないとき(例えば、回送中のとき)に強い制振モードを設定すると、いたずらに燃費の低下やバッテリーの消耗を招くことになる。また、貸走車においては、不要な制振によって無駄な追加料金が発生してしまう。
そこで、本実施形態では、車内の状況や車両の運転状況、周囲環境など車両のさまざまな状況に応じて、エネルギー消費(燃費やバッテリーの消費量など)を考慮しながら、適応的に制振モードを切り替えて、車体の制振制御を行なうようにする。すなわち、車内の状況や車両の運転状況、周囲環境を常時モニタリングして、現状ほど強い制振を行なう必要がない状況と判断された場合には弱い制振モードに切り替え、逆に、もっと強い制振を行なう必要があると判断された場合には強い制振モードに切り替えるようにする。
制振モードを制御するためのモニタリング対象は、車内の状況、車両の運転状況、周囲環境に大別される。また、モニタリングすべき車内の状況として、搭乗者の状況、車内の物体の状況、車内に設置されたディスプレイなど車内デバイスの状況などを挙げることができる。以下、モニタリング対象毎に、制振モードの制御方法について説明する。
(1)車内の状況に応じた制振モードの制御
車内の状況をモニタリングする手段として、例えば、車内状態検出部2510に含まれる車内カメラやサーモカメラ、搭乗者の生体情報(発汗、体温、心拍など)を検出する生体センサー、座席に加わる荷重や車室の重量の変化を検出する荷重センサー、温度計、湿度計、匂いセンサー、照度センサーを挙げることができる。
車内の状況をモニタリングする手段として、例えば、車内状態検出部2510に含まれる車内カメラやサーモカメラ、搭乗者の生体情報(発汗、体温、心拍など)を検出する生体センサー、座席に加わる荷重や車室の重量の変化を検出する荷重センサー、温度計、湿度計、匂いセンサー、照度センサーを挙げることができる。
車内カメラの撮像画像を顔認識して、搭乗者数や各搭乗者を人物特定したり、顔の表情を判定したり、物体認識して車内にどのような物体が存在するかを判定したりすることができる。また、サーモカメラの撮像画像に基づいて、搭乗者の体温や、車内の物体の温度(例えば、熱い液体物か)を判定することができる。搭乗者の生体情報(発汗、体温、心拍など)や顔の表情と車内の雰囲気(気温、湿度)を総合的に評価して、搭乗者に不快感を与える(若しくは、快適性が低下した)状況か否かを判定することもできる。また、車内カメラの撮像画像の認識結果又は匂いセンサーの検出結果に基づいて、搭乗者が車内で飲食していることを検出することができる。あるいは、照度センサーの検出結果に基づいて、搭乗者が飲食、又はその他の作業中(例えば、チェスなどのゲームを行なっている、プラモデルを組み立てている、絵を描いている)であることを検出することができる。また、搭乗者が所持するスマートフォンが制振のプリファレンスに関する情報を、V2X通信などを介して車両側に送信するようにしてもよい。
また、車内の物体がモニタリング対象であれば、車内カメラの撮像画像を物体認識して、車内にテーブルや机、椅子などの物体が設置されていることや、デバイスの上に物が置かれていることを検知すること、さらには置かれている物の大きさ(接地面積)や重さを推定することができる。荷重センサーで座席に加わる荷重や車室の重量の変化を検出することができる。また、照度センサーで車内の明るさや影の変化を検出することができる。
また、車内ディスプレイなどのデバイスがモニタリング対象であれば、車内デバイスの動作状況をモニタリングしてもよい。また、スマートフォンなど搭乗者が操作する情報端末から端末の操作状況などに関する情報を取得するようにしてもよい。
(1-1)搭乗者の状況に応じた制振モードの制御
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、搭乗者のさまざまな状況が想定される。搭乗者が着座し且つシートベルトを締めているとは限らず、着座しているがシートベルトを外している状態、横になっている状態、立っている状態、スマートフォンなどの情報端末を操作している状態、飲食をしている状態、不快感又は不健康(酔いを含む)な状態、搭乗者数が多い場合などさまざまである。搭乗者の状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。また、搭乗者の人数に応じて、不快感が増し、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が変化することもある。搭乗者の状況に応じた制振モードの設定例を以下の表2にまとめておく。
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、搭乗者のさまざまな状況が想定される。搭乗者が着座し且つシートベルトを締めているとは限らず、着座しているがシートベルトを外している状態、横になっている状態、立っている状態、スマートフォンなどの情報端末を操作している状態、飲食をしている状態、不快感又は不健康(酔いを含む)な状態、搭乗者数が多い場合などさまざまである。搭乗者の状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。また、搭乗者の人数に応じて、不快感が増し、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が変化することもある。搭乗者の状況に応じた制振モードの設定例を以下の表2にまとめておく。
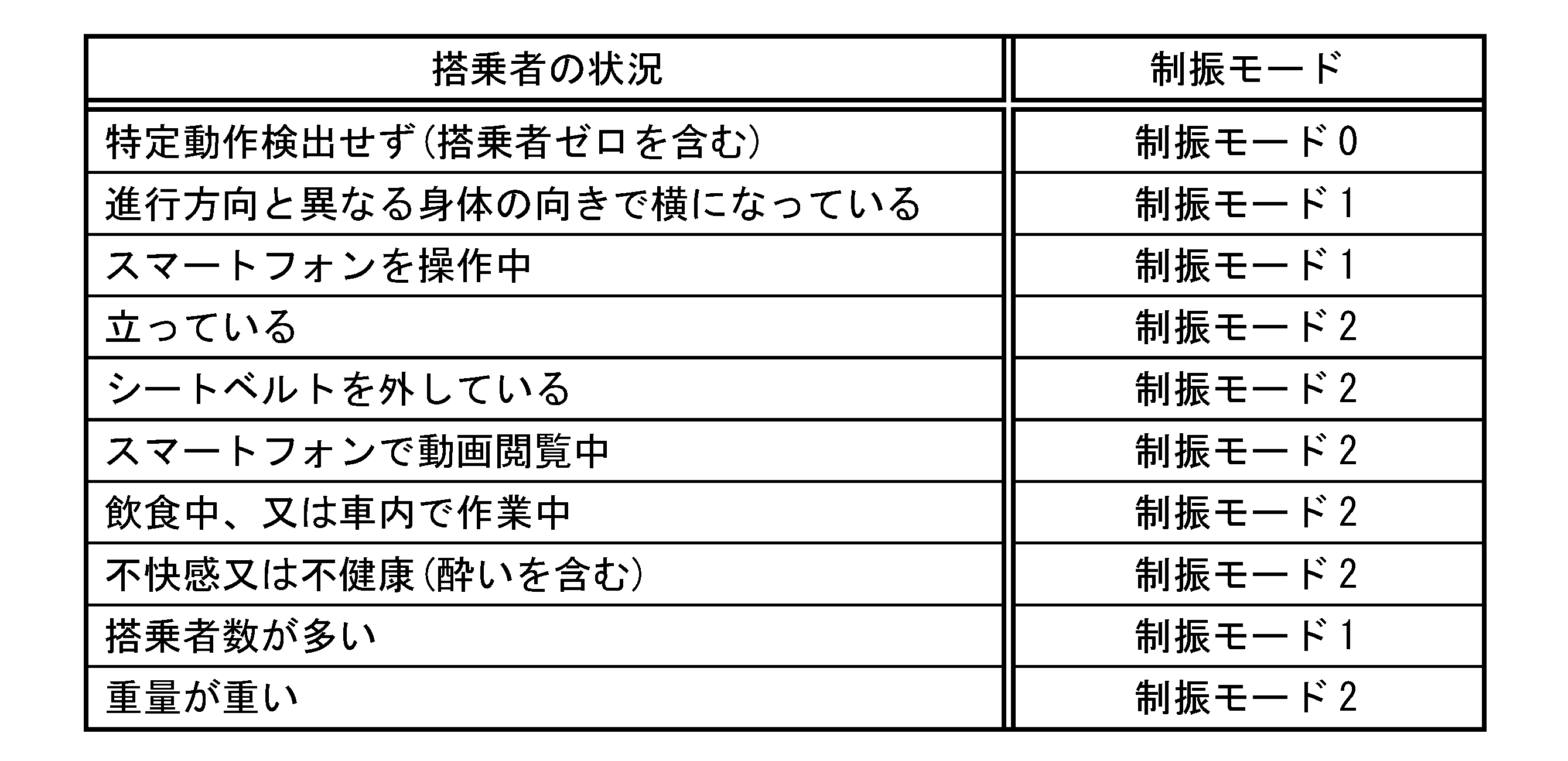
なお、搭乗者が椅子に座って作業しているときや、テーブルを使用して飲食やその他の作業中のときには、少なくとも椅子やテーブルなど車室に設置された特定の物体に限定して制振を行なうようにしてもよい。制振の対象を限定することで、走行部(シャシー)より上の部分すべてを制振する場合と比べて、エネルギー消費を抑制することができる。
表2に挙げたような搭乗者の状況は、車両の制振モードを切り替えるトリガーとなる条件に相当する。搭乗者の状況と制振モードとの対応関係をデータベース化して管理するようにしてもよい。
(1-2)車内の物体の状況に応じた制振モードの制御
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、車内にさまざまな物体があることが想定される。例えば、車内にテーブルが設置され、テーブル上には花瓶や飲み物を入れたコップ、料理が盛られた皿が置かれ、搭乗者が食事やパーティーをしていることも想定される。このような場合、車体を適切に制振しないと、テーブルが転倒したり、テーブルの上に置かれた物体が落下したりして破損するおそれがある。このため、車内の物体の状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。車内の物体の状況に応じた制振モードの設定例を以下の表3にまとめておく。
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、車内にさまざまな物体があることが想定される。例えば、車内にテーブルが設置され、テーブル上には花瓶や飲み物を入れたコップ、料理が盛られた皿が置かれ、搭乗者が食事やパーティーをしていることも想定される。このような場合、車体を適切に制振しないと、テーブルが転倒したり、テーブルの上に置かれた物体が落下したりして破損するおそれがある。このため、車内の物体の状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。車内の物体の状況に応じた制振モードの設定例を以下の表3にまとめておく。

なお、車室内で物体が検出された場合には、その物体が置かれている場所に応じて制振モードの切り替えを制御するようにしてもよい。同じ物体でも、車室の床面に置かれている場合と、車内に設置されたテーブルの上に置かれている場合とでは、求められる制振のレベルが異なるからである。また、テーブルなど車内に設置されたデバイス上に物体が置かれている場合には、その物体の大きさ(接地面積)や重さに基づいて制振モードを決定するようにしてもよい。
また、少なくとも転倒や落下を回避したい物体に限定して制振を行なうようにしてもよい。制振の対象を限定することで、走行部(シャシー)より上の部分すべてを制振する場合と比べて、エネルギー消費を抑制することができる。
表3に挙げたような車内の物体の状況は、車両の制振モードを切り替えるトリガーとなる条件に相当する。車内の物体の状況と制振モードとの対応関係をデータベース化して管理するようにしてもよい。
(1-3)車内デバイスに応じた制振モードの制御
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、車内にディスプレイやオーディオ製品などが設置され、コンテンツを視聴することが想定される。ディスプレイは、例えばワンセグ放送を受信する320×180画素程度の小画面ディスプレイの他、車室の壁面(ウィンドウを含む)に映像を投影する大画面若しくは全天球ディスプレイも含まれる。
車室がリラックスできる空間であり、リビング・ルームのように使用される場合には、車内にディスプレイやオーディオ製品などが設置され、コンテンツを視聴することが想定される。ディスプレイは、例えばワンセグ放送を受信する320×180画素程度の小画面ディスプレイの他、車室の壁面(ウィンドウを含む)に映像を投影する大画面若しくは全天球ディスプレイも含まれる。
音楽鑑賞は車体の振動の影響を受け難いが、ディスプレイの画面を見ているときには、搭乗者は酔うなど、振動の影響を受け易い。また、画面に表示されているコンテンツが静止画か動画かによって振動の影響を受ける度合いは異なる。再生コンテンツが静止画又は動画のいずれであるかは、コンテンツのメタ情報に基づいて検出することができる。さらに、車載カメラで撮像した映像を表示している場合、車体が振動すると、画面だけでなく車載カメラも揺れるので、振動の影響はさらに大きくなる。車内ディスプレイの状況に応じた制振モードの設定例を以下の表4にまとめておく。

また、動画コンテンツを視聴する場合であっても、動きの激しい映像か否かによっても振動の影響が異なるので、動画の動きに応じて制振モードを設定するようにしてもよい。
なお、搭乗者が動画コンテンツを閲覧しているときには、少なくとも車内ディスプレイに限定して制振制振を行なうようにしてもよい。制振の対象を限定することで、走行部(シャシー)より上の部分すべてを制振する場合と比べて、エネルギー消費を抑制することができる。
表4に挙げたような車内ディスプレイの状況は、車両の制振モードを切り替えるトリガーとなる条件に相当する。車内ディスプレイの状況と制振モードとの対応関係をデータベース化して管理するようにしてもよい。
(2)車両の運転状況に応じた制振モードの制御
車両の運転状況をモニタリングする手段として、車両状態検出部2110を挙げることができる。例えば、エンジン回転数又は車輪の回転速度などの検出結果に基づいて高速走行か低速走行かを判定することができる。また、ジャイロ・センサーの検出結果に基づいて、車体が揺れている状態か否かを判定することができる。また、アクセル・ペダルの操作量、ブレーキ・ペダルの操作量、ステアリング・ホイールの操舵角に基づいて、円滑に走行できない状況(カーブの多い道、不整地など)か否かを判定することができる。これらの車両の運転状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。また、自車両の運転状況に関する情報を、自車両を観察できる周辺車両や歩行者など外部からV2X通信などを介して受信するようにしてもよい。
車両の運転状況をモニタリングする手段として、車両状態検出部2110を挙げることができる。例えば、エンジン回転数又は車輪の回転速度などの検出結果に基づいて高速走行か低速走行かを判定することができる。また、ジャイロ・センサーの検出結果に基づいて、車体が揺れている状態か否かを判定することができる。また、アクセル・ペダルの操作量、ブレーキ・ペダルの操作量、ステアリング・ホイールの操舵角に基づいて、円滑に走行できない状況(カーブの多い道、不整地など)か否かを判定することができる。これらの車両の運転状況に応じて、車体の振動が許容されるレベル(若しくは、制振が要求されるレベル)が異なる。また、自車両の運転状況に関する情報を、自車両を観察できる周辺車両や歩行者など外部からV2X通信などを介して受信するようにしてもよい。
タクシーのような送迎に使用される車両の場合には、タクシーメーターのような車内機器2760のスイッチ操作に基づいて、乗客なしの状況であっても迎車又は回送のいずれであるかを判定することができる。迎車中であれば、車内のセッティングなどを保つために車体の制振が必要であるが、回送中であればそのような必要はない。
車両の運転状況に応じた制振モードの設定例を以下の表5にまとめておく。

表5に挙げたような車両の運転状況は、車両の制振モードを切り替えるトリガーとなる条件に相当する。車両の運転状況と制振モードとの対応関係をデータベース化して管理するようにしてもよい。
(3)周囲環境に応じた制振モードの制御
車両の周囲環境をモニタリングする手段として、車載カメラのような撮像部2410や、車外情報検出部2420に含まれる環境センサーや周囲情報検出センサーなどを挙げることができる。あるいは、車両自体が周囲環境の情報を収集するのではなく、汎用通信インターフェース2620がインターネットなどの外部ネットワーク上のサーバーからV2X通信などを介して、周囲環境に関する情報を受信するようにしてもよい。例えば、豪雨や豪雪、落雷、暴風雨、台風、地震などの天災時には、いずれの制振モードでも搭乗者の快適性の低下を防ぐことができない。周囲環境に応じた制振モードの設定例を以下の表6にまとめておく。
車両の周囲環境をモニタリングする手段として、車載カメラのような撮像部2410や、車外情報検出部2420に含まれる環境センサーや周囲情報検出センサーなどを挙げることができる。あるいは、車両自体が周囲環境の情報を収集するのではなく、汎用通信インターフェース2620がインターネットなどの外部ネットワーク上のサーバーからV2X通信などを介して、周囲環境に関する情報を受信するようにしてもよい。例えば、豪雨や豪雪、落雷、暴風雨、台風、地震などの天災時には、いずれの制振モードでも搭乗者の快適性の低下を防ぐことができない。周囲環境に応じた制振モードの設定例を以下の表6にまとめておく。

表6に挙げたような周囲環境は、車両の制振モードを切り替えるトリガーとなる条件に相当する。周囲環境と制振モードとの対応関係をデータベース化して管理するようにしてもよい。
C-3.制振モードの切り替え制御
図2及び図3には、車両の状況に応じて制振モードを切り替えるための処理手順をフローチャートの形式で示している。図示の処理手順は、例えば車両の運転中に、マイクロ・コンピューター2610が所定のプログラム・コードを実行するという形態で実現することができる。
図2及び図3には、車両の状況に応じて制振モードを切り替えるための処理手順をフローチャートの形式で示している。図示の処理手順は、例えば車両の運転中に、マイクロ・コンピューター2610が所定のプログラム・コードを実行するという形態で実現することができる。
まず、現在設定されている(若しくは、制振機構部2120が行なっている)制振モードを取得または確認する(ステップS201)。
次いで、車内状態検出部2510に含まれるドライバーモニターカメラの撮像画像や、荷重センサーで検出された座席や車室の重量の変化に基づいて、車室内に搭乗者がいるかどうかをチェックする(ステップS202)。
車室内に搭乗者がいる場合には(ステップS202のYes)、車内状態検出部2510、撮像部2410並びに車外情報検出部2420、車両状態検出部2110などから、車両の状況に関するデータを取得する(ステップS203)。そして、取得したデータを分析して、車両の状況を推定する(ステップS204)。ここで言う車両の状況には、搭乗者の状況、車内の物体の状況、車内デバイスの状況、車両の運転状況、車両の周囲環境が含まれる。
次いで、推定された車両の状況が所定の条件に該当するか否かをチェックする(ステップS205)。ここで言う所定の条件とは、車両に対して制振を行なうべき条件のことを指す。
車両の状況が所定の条件に該当しない場合には(ステップS205のNo)、ステップS201に戻って、車両の状況が変わるまで上記の処理を繰り返し実行する。一方、車両の状況が所定の条件に該当する場合には(ステップS205のYes)、車両の状況に応じた制振モードが何であるかを割り出す(ステップS206)。
ここで言う所定の条件とは、制振モードを切り替えるトリガーとなるような条件である。所定の条件は、例えば表2~表6に示したように、搭乗者の状況や車内の物体の状況、車内デバイス、車両の運転状況、周囲環境などに関する条件である。トリガーとなる条件に関する情報や、各条件に対応する制振モードをデータベース化して管理するようにしてもよい。
次いで、現在設定されている制振モード(若しくは、ステップS201で取得した制振モード)から変更する必要があるか否かをチェックする(ステップS207)。
制振モードを変更する必要がある場合とは、車内の状況や搭乗者の居心地などを向上するためによりレベルの高い制振モードに変更した方がよい場合と、車体を制振することが不要になったり車体が振動する状況から脱したりしてレベルの低い制振モードに変更して、むしろエネルギー消費を抑えた方がよい場合がある。
制振モードを変更する必要がない場合には(ステップS207のNo)、ステップS201に戻って、制振モードを変更する必要が生じるまで上記の処理を繰り返し実行する。
一方、制振モードを変更する必要がある場合には(ステップS207のYes)、制振モードの切り替えをユーザーに通知して(ステップS208)、ユーザーが制振モードの切り替えを許可したか否かをチェックする(ステップS209)。
ここで、制振モードの切り替えを通知し、許可を得るユーザーとは、乗り心地の影響を受ける車両の搭乗者やドライバーである。車両がタクシーのような賃走車で、制振モードの切り替えにより乗り心地だけでなく運賃が増減する場合には、ユーザーとして乗客の許可を得る必要がある。あるいは無人運転車の場合には、搭乗者ではなく、遠隔にいる車両の管理者などの許可を得るようにしてもよい。
また、レベルの高い制振モードに切り替えると、燃費の低下やバッテリーの消耗を招来するので、そのことをユーザーに通知する必要がある。制振モードの切り替えの通知は、例えばGUI(Graphical User Interface)画面を介して行なう。勿論、同様の通知をGUIではなく音声メッセージで行ない、ユーザーも制振モードの切り替えを許可するか否かを音声入力で指示するようにしてもよい。
図4には、制振モードの切り替えを通知するGUI画面の構成例を示している。図示の例では、「燃費悪化、航続距離低下を招きますが、制振モード1に切り替えますか?」というメッセージを表示するとともに、制御モードの切り替えを許可する「Yes」ボタン並びに拒絶する「No」ボタンが配設されている。
また、図5には、制振モードの切り替えを通知するGUI画面の他の構成例を示している。図示の例では、制御モードに応じて追加料金が課される賃走車を想定しており、「10km当たり800円の追加料金がかかりますが、制御モード1に切り替えますか?」というメッセージを表示するとともに、制御モードの切り替えを許可する「Yes」ボタン並びに拒絶する「No」ボタンが配設されている。
図4や図5に示したGUI画面で「No」ボタンが押されるなど、制振モードの切り替えが拒否された場合には(ステップS209のNo)、ステップS201に戻って、制振モードの変更が許可されるまで上記の処理を繰り返し実行する。
一方、図4や図5に示したGUI画面で「Yes」ボタンが押されるなど、制振モードの切り替えが許可された場合には(ステップS209のYes)、許可された制振モードに設定する(ステップS210)。
車体を新たな制振モードに設定したことを、例えばGUI画面を介してユーザーに通知するようにしてもよい。また、ユーザーが新たな制振モードに満足しない場合もあるので、GUI画面で制振モードの変更依頼を受け付けるようにしてもよい。例えば、レベルの高い制振モードに切り替えたが、ユーザーが元のレベルの低い制振モードでも十分と感じた場合や、まだ乗り心地が改善されないのでもっとレベルの高い制振モードに切り替えたいと思う場合があるからである。勿論、同様の通知をGUIではなく音声メッセージで行ない、ユーザーも制振モードの変更を音声入力で指示するようにしてもよい。
図6には、制振モードの設定を通知するGUI画面の構成例を示している。図示の例では、「制振モード1に切り替えました。このまま制振モード1を続けますか?」というメッセージを表示するとともに、制御モードの継続を指示する「Yes」ボタン、元の制振モードへの復帰を指示する「元のモードに戻す」ボタン、よりレベルの高い制振モードへの変更を指示する「より振動を低減するモードへ移行」ボタンが配設されている。
ステップS210で設定した制振モードに対して、ユーザーから制振モードの変更依頼がなかった場合には(ステップS211のNo)、ステップS201に戻り、上記の処理を繰り返し実行する。
一方、ユーザーから制振モードの変更依頼を受け付けたときには(ステップS211のYes)、変更依頼された制振モード(元の制振モード、又は、よりレベルの高い(低い)制振モード)へ変更する(ステップS212)。その後、ステップS201に戻り、上記の処理を繰り返し実行する。
なお、制振モードの変更依頼を受け付けたときには、ステップS206で制振モードの切り替えのトリガーとなった条件と変更された制振モードの対応関係を記憶又は学習するようにしてもよい。あるいは、制振モードの変更を依頼したユーザー毎に条件と制振モードの対応関係を記憶又は学習するようにしてもよい。
また、ステップS202で車室内に搭乗者がいないと判定された場合には(ステップS202のNo)、車内状態検出部2510や車両状態検出部2110などから、車内の物体の状況や車両の運転状況に関するデータを取得する(ステップS213)。
次いで、車内に持ち込まれた物体が存在するか否かをチェックする(ステップS214)。車内に持ち込まれた物体が検出ない場合には(ステップS214のNo)、ステップS201に戻って、車両の状況が変わるまで上記の処理を繰り返し実行する。
車内に持ち込まれた物体が検出された場合には(ステップS214のYes)、検出された物体又は車両の運転状況が所定の条件に該当するか否かをチェックする(ステップS215)。ここで言う所定の条件とは、車両に対して制振を行なうべき条件のことを指す。
ここで言う車両の運転状況とは、例えば迎車又は回送のいずれであるかを意味する。車両が迎車中であれば、車内に置かれた物体の状況(車内のセッティングなど)を保つために車体の制振が必要である。他方、回送中の車両であれば、車内の物体の状況を保つ必要はなく、したがって、車体の制振も不要である。
検出された物体又は車両の運転状況が所定の条件に該当しない場合には(ステップS215のNo)、ステップS201に戻って、車両の状況が変わるまで上記の処理を繰り返し実行する。一方、検出された物体又は車両の運転状況が所定の条件に該当する場合には(ステップS215のYes)、例えば上記の表3並びに表5若しくはこれらの表に該当する情報を参照して、制振モードを変更する必要があるか否かをチェックする(ステップS216)。
制振モードを変更する必要がない場合には(ステップS216のNo)、ステップS201に戻って、制振モードを変更する必要が生じるまで上記の処理を繰り返し実行する。
一方、制振モードを変更する必要がある場合には(ステップS216のYes)、制振モードを変更する(ステップS217)。その後、ステップS201に戻り、上記の処理を繰り返し実行する。
このように図2及び図3に示した処理手順によれば、車内の状況や車両の運転状況、周囲環境など車両のさまざまな状況に応じて、エネルギー消費(燃費やバッテリーの消費量など)を考慮しながら、適応的に制振モードを切り替えて、車体の制振制御を行なうようにすることができる。
以上、特定の実施形態を参照しながら、本明細書で開示する技術について詳細に説明してきた。しかしながら、本明細書で開示する技術の要旨を逸脱しない範囲で当業者が該実施形態の修正や代用を成し得ることは自明である。
本明細書で開示する技術は、自動車(ガソリン車及びディーゼル車を含む)、電気自動車、ハイブリッド電気自動車、自動二輪車、自転車、パーソナル・モビリティーなどさまざまな車両に適用することができる。さらには本明細書で開示する技術は、道路を走行する車両以外の形態の移動体(ロボット、飛行機や船舶など)にも適用することができる。
本明細書で開示する技術を適用した制振制御装置は、例えば自動運転中の車両に対して車内の状況に応じて、エネルギー消費(燃費やバッテリーの消費量など)を考慮しながら適切な制振モードで車体の制振制御を行なうことができるが、勿論、手動運転中の車両に対しても同様の制振制御を行なうことができる。
要するに、例示という形態により本明細書で開示する技術について説明してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本明細書で開示する技術の要旨を判断するためには、特許請求の範囲を参酌すべきである。
なお、本明細書の開示の技術は、以下のような構成をとることも可能である。
(1)振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する制振制御装置。
(2)前記異なる複数の制振モードは、前記移動体の振動を制振するエリアが互いに異なる、
上記(1)に記載の制振制御装置。
(3)搭乗者の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した搭乗者の状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(4)前記制御部は、前記移動体内に飲食物が存在することを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(2)に記載の制振制御装置。
(5)前記制御部は、搭乗者の快適性が低下したことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(2)に記載の制振制御装置。
(6)前記移動体内に設置された物体の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した前記物体の状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(7)前記制御部は、前記検出部が検出した前記物体の置かれている場所に応じて制振モードの切り替えを制御する、
上記(6)に記載の制振制御装置。
(8)前記制御部は、前記移動体内に設置された所定物の上に物が置かれたことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(6)に記載の制振制御装置。
(9)前記制御部は、前記移動体内に設置されたデバイスの動作状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(10)前記移動体の運転状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した運転状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(11)前記移動体の周囲環境を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した周囲環境に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(12)前記制御部は、制振モードを切り替えるか否かをユーザーに選択させる、
上記(1)に記載の制振制御装置。
(13)前記制振モードは、前記移動体を低速にするモード又は前記移動体を停止するモードのうち少なくとも1つを含む、
上記(1)に記載の制振制御装置。
(14)前記制振モードは、前記移動体が移動する経路を選択するモードを含む、
上記(1)に記載の制振制御装置。
(15)前記制振モードは、制振を行なわないモードを含む、
上記(1)に記載の制振制御装置。
(16)前記制振モード毎にエネルギー消費が異なる、
上記(1)に記載の制振制御装置。
(17)振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振ステップと、
前記移動体の状況に応じて前記制振ステップにおける制振モードを制御する制御ステップと、
を有する制振制御方法。
(18)当該移動体を駆動するための駆動部と、
前記駆動部による駆動に基づく振動を抑制する程度が異なる複数の制振モードのいずれかで前記移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する移動体。
(19)前記制御部は、切り替えが許可されたことに応じて制振モードを設定する、
上記(12)に記載の制振制御装置。
(20)前記制御部は、ユーザーから制振モードの変更が依頼されたことに応じて制振モードを変更する、
上記(1)に記載の制振制御装置。
(21)前記制振モードは、前記移動体を停止するモードを含む、
上記(1)に記載の制振制御装置。
(22)前記制振機構部は、前記移動体の一部のみを制振する、
上記(1)に記載の制振制御装置。
(1)振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する制振制御装置。
(2)前記異なる複数の制振モードは、前記移動体の振動を制振するエリアが互いに異なる、
上記(1)に記載の制振制御装置。
(3)搭乗者の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した搭乗者の状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(4)前記制御部は、前記移動体内に飲食物が存在することを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(2)に記載の制振制御装置。
(5)前記制御部は、搭乗者の快適性が低下したことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(2)に記載の制振制御装置。
(6)前記移動体内に設置された物体の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した前記物体の状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(7)前記制御部は、前記検出部が検出した前記物体の置かれている場所に応じて制振モードの切り替えを制御する、
上記(6)に記載の制振制御装置。
(8)前記制御部は、前記移動体内に設置された所定物の上に物が置かれたことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
上記(6)に記載の制振制御装置。
(9)前記制御部は、前記移動体内に設置されたデバイスの動作状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(10)前記移動体の運転状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した運転状況に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(11)前記移動体の周囲環境を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した周囲環境に応じて制振モードの切り替えを制御する、
上記(1)に記載の制振制御装置。
(12)前記制御部は、制振モードを切り替えるか否かをユーザーに選択させる、
上記(1)に記載の制振制御装置。
(13)前記制振モードは、前記移動体を低速にするモード又は前記移動体を停止するモードのうち少なくとも1つを含む、
上記(1)に記載の制振制御装置。
(14)前記制振モードは、前記移動体が移動する経路を選択するモードを含む、
上記(1)に記載の制振制御装置。
(15)前記制振モードは、制振を行なわないモードを含む、
上記(1)に記載の制振制御装置。
(16)前記制振モード毎にエネルギー消費が異なる、
上記(1)に記載の制振制御装置。
(17)振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振ステップと、
前記移動体の状況に応じて前記制振ステップにおける制振モードを制御する制御ステップと、
を有する制振制御方法。
(18)当該移動体を駆動するための駆動部と、
前記駆動部による駆動に基づく振動を抑制する程度が異なる複数の制振モードのいずれかで前記移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する移動体。
(19)前記制御部は、切り替えが許可されたことに応じて制振モードを設定する、
上記(12)に記載の制振制御装置。
(20)前記制御部は、ユーザーから制振モードの変更が依頼されたことに応じて制振モードを変更する、
上記(1)に記載の制振制御装置。
(21)前記制振モードは、前記移動体を停止するモードを含む、
上記(1)に記載の制振制御装置。
(22)前記制振機構部は、前記移動体の一部のみを制振する、
上記(1)に記載の制振制御装置。
2000…車両制御システム、2010…通信ネットワーク
2100…駆動系制御ユニット
2110…車両状態検出部、2120…制振機構部
2200…ボディ系制御ユニット、2300…バッテリー制御ユニット
2310…バッテリー装置、2400…車外情報検出ユニット
2410…撮像部、2420…車外情報検出部
2500…車内情報検出ユニット、2510…車内状態検出部
2600…統合制御ユニット、2610…マイクロ・コンピューター
2620…汎用通信インターフェース
2630…専用通信インターフェース、2640…測位部
2650…ビーコン受信部、2660…車内機器インターフェース
2670…音声画像出力部
2680…車載ネットワーク・インターフェース、2690…記憶部
2710…オーディオ・スピーカー、2720…表示部
2730…インストルメント・パネル、2760…車内機器
2800…入力部
2100…駆動系制御ユニット
2110…車両状態検出部、2120…制振機構部
2200…ボディ系制御ユニット、2300…バッテリー制御ユニット
2310…バッテリー装置、2400…車外情報検出ユニット
2410…撮像部、2420…車外情報検出部
2500…車内情報検出ユニット、2510…車内状態検出部
2600…統合制御ユニット、2610…マイクロ・コンピューター
2620…汎用通信インターフェース
2630…専用通信インターフェース、2640…測位部
2650…ビーコン受信部、2660…車内機器インターフェース
2670…音声画像出力部
2680…車載ネットワーク・インターフェース、2690…記憶部
2710…オーディオ・スピーカー、2720…表示部
2730…インストルメント・パネル、2760…車内機器
2800…入力部
Claims (18)
- 振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する制振制御装置。 - 前記異なる複数の制振モードは、前記移動体の振動を制振するエリアが互いに異なる、
請求項1に記載の制振制御装置。 - 搭乗者の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した搭乗者の状況に応じて制振モードの切り替えを制御する、
請求項1に記載の制振制御装置。 - 前記制御部は、前記移動体内に飲食物が存在することを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
請求項3に記載の制振制御装置。 - 前記制御部は、搭乗者の快適性が低下したことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
請求項3に記載の制振制御装置。 - 前記移動体内に設置された物体の状況を含む前記移動体の状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した前記物体の状況に応じて制振モードの切り替えを制御する、
請求項1に記載の制振制御装置。 - 前記制御部は、前記検出部が検出した前記物体の置かれている場所に応じて制振モードの切り替えを制御する、
請求項6に記載の制振制御装置。 - 前記制御部は、前記移動体内に設置された所定物の上に物が置かれたことを前記検出部が検出したことに応じて、より強く振動を抑制する制振モードに切り替える、
請求項6に記載の制振制御装置。 - 前記制御部は、前記移動体内に設置されたデバイスの動作状況に応じて制振モードの切り替えを制御する、
請求項1に記載の制振制御装置。 - 前記移動体の運転状況を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した運転状況に応じて制振モードの切り替えを制御する、
請求項1に記載の制振制御装置。 - 前記移動体の周囲環境を検出する検出部をさらに備え、
前記制御部は、前記検出部が検出した周囲環境に応じて制振モードの切り替えを制御する、
請求項1に記載の制振制御装置。 - 前記制御部は、制振モードを切り替えるか否かをユーザーに選択させる、
請求項1に記載の制振制御装置。 - 前記制振モードは、前記移動体を低速にするモード又は前記移動体を停止するモードのうち少なくとも1つを含む、
請求項1に記載の制振制御装置。 - 前記制振モードは、前記移動体が移動する経路を選択するモードを含む、
請求項1に記載の制振制御装置。 - 前記制振モードは、制振を行なわないモードを含む、
請求項1に記載の制振制御装置。 - 前記制振モード毎にエネルギー消費が異なる、
請求項1に記載の制振制御装置。 - 振動を抑制する程度が異なる複数の制振モードのいずれかで移動体を制振する制振ステップと、
前記移動体の状況に応じて前記制振ステップにおける制振モードを制御する制御ステップと、
を有する制振制御方法。 - 当該移動体を駆動するための駆動部と、
前記駆動部による駆動に基づく振動を抑制する程度が異なる複数の制振モードのいずれかで前記移動体を制振する制振機構部と、
前記移動体の状況に応じて前記制振機構部における制振モードを制御する制御部と、
を具備する移動体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018508535A JP6900950B2 (ja) | 2016-03-29 | 2017-02-14 | 制振制御装置及び制振制御方法、並びに移動体 |
| US16/070,034 US10981427B2 (en) | 2016-03-29 | 2017-02-14 | Damping control device, damping control method, and moving body |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-065650 | 2016-03-29 | ||
| JP2016065650 | 2016-03-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017169203A1 true WO2017169203A1 (ja) | 2017-10-05 |
Family
ID=59962931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/005252 WO2017169203A1 (ja) | 2016-03-29 | 2017-02-14 | 制振制御装置及び制振制御方法、並びに移動体 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10981427B2 (ja) |
| JP (2) | JP6900950B2 (ja) |
| WO (1) | WO2017169203A1 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019089591A1 (en) * | 2017-10-30 | 2019-05-09 | Mobileye Vision Technologies Ltd. | Vehicle navigation based on human activity |
| CN110154939A (zh) * | 2018-02-16 | 2019-08-23 | 丰田自动车株式会社 | 移动体、业务支援方法、存储介质及业务支援系统 |
| JP2019151290A (ja) * | 2018-03-06 | 2019-09-12 | トヨタ自動車株式会社 | 輸送システム、情報処理装置、情報処理方法、およびプログラム |
| CN110641391A (zh) * | 2018-06-26 | 2020-01-03 | 上海博泰悦臻网络技术服务有限公司 | 车辆、车机设备及其车载办公环境控制方法 |
| EP3598353A1 (en) * | 2018-07-20 | 2020-01-22 | Panasonic Intellectual Property Corporation of America | Information processing method |
| EP3598352A1 (en) * | 2018-07-20 | 2020-01-22 | Panasonic Intellectual Property Corporation of America | Information processing method |
| WO2020031652A1 (ja) * | 2018-08-10 | 2020-02-13 | 日立オートモティブシステムズ株式会社 | 情報処理装置、車両制御方法、情報処理システム |
| WO2020039222A1 (ja) * | 2018-08-20 | 2020-02-27 | 日産自動車株式会社 | 車両管理システム及び車両管理方法 |
| WO2022064649A1 (ja) * | 2020-09-25 | 2022-03-31 | 三菱電機株式会社 | 移動体制御装置および移動体制御方法 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11112793B2 (en) * | 2017-08-28 | 2021-09-07 | Motional Ad Llc | Mixed-mode driving of a vehicle having autonomous driving capabilities |
| JP6881401B2 (ja) * | 2018-07-09 | 2021-06-02 | 株式会社デンソー | 異常判定装置 |
| US12100228B2 (en) * | 2019-04-24 | 2024-09-24 | Mitsubishi Electric Corporation | Travel environment analysis apparatus, travel environment analysis system, and travel environment analysis method |
| KR20210147154A (ko) * | 2020-05-27 | 2021-12-07 | 현대자동차주식회사 | 차량 통합 제어 장치, 그를 포함한 시스템 및 그 방법 |
| KR20220039980A (ko) * | 2020-09-22 | 2022-03-30 | 현대자동차주식회사 | 편의시설 경유 제안 장치 및 이를 포함한 자율 주행 차량 |
| JP7060182B1 (ja) * | 2020-12-23 | 2022-04-26 | 日本精工株式会社 | 電動パワーステアリング装置の制御装置、および制御方法 |
| EP4296012A1 (en) * | 2021-06-25 | 2023-12-27 | Samsung Electronics Co., Ltd. | Traveling robot device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004299569A (ja) * | 2003-03-31 | 2004-10-28 | Mazda Motor Corp | 自動車用制御装置 |
| JP2012088622A (ja) * | 2010-10-21 | 2012-05-10 | Fujitsu Ltd | 映像表示装置、映像表示方法、及びプログラム |
| JP2013189064A (ja) * | 2012-03-13 | 2013-09-26 | Toyota Central R&D Labs Inc | 車両制御装置及びプログラム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2532059B2 (ja) * | 1985-09-13 | 1996-09-11 | 日産自動車株式会社 | 車両のサスペンシヨン制御装置 |
| US6622074B1 (en) * | 2002-05-29 | 2003-09-16 | Ford Global Technologies, Llc | Vehicle motion control subsystem and method |
| US7212896B2 (en) * | 2002-05-29 | 2007-05-01 | Ford Global Technologies, Llc | Vehicle control |
| US7480547B2 (en) * | 2005-04-14 | 2009-01-20 | Ford Global Technologies, Llc | Attitude sensing system for an automotive vehicle relative to the road |
| JP4852919B2 (ja) * | 2005-07-25 | 2012-01-11 | アイシン・エィ・ダブリュ株式会社 | 車両乗上制御システム及び車両乗上制御方法 |
| US7878312B2 (en) * | 2006-05-31 | 2011-02-01 | University Of Maryland | Adaptive energy absorption system for a vehicle seat |
| DE102006037531A1 (de) * | 2006-08-10 | 2008-02-14 | Siemens Ag | Verfahren und Vorrichtung zum Betreiben eines Fahrzeugs |
| US8285447B2 (en) * | 2007-03-20 | 2012-10-09 | Enpulz, L.L.C. | Look ahead vehicle suspension system |
| WO2012039299A1 (ja) * | 2010-09-24 | 2012-03-29 | シンフォニアテクノロジー株式会社 | アクティブ制振装置、車両、アクティブ制振装置の制御方法 |
| US9533539B2 (en) * | 2011-10-20 | 2017-01-03 | GM Global Technology Operations LLC | Vehicle suspension system and method of using the same |
| US9205717B2 (en) * | 2012-11-07 | 2015-12-08 | Polaris Industries Inc. | Vehicle having suspension with continuous damping control |
| JP6205947B2 (ja) | 2013-07-26 | 2017-10-04 | 日産自動車株式会社 | 自動運転制御装置 |
| JP2016007978A (ja) | 2014-06-25 | 2016-01-18 | トヨタ自動車株式会社 | 車両制御装置 |
| JP6829422B2 (ja) * | 2018-02-05 | 2021-02-10 | トヨタ自動車株式会社 | 車両用制振制御装置 |
-
2017
- 2017-02-14 WO PCT/JP2017/005252 patent/WO2017169203A1/ja active Application Filing
- 2017-02-14 US US16/070,034 patent/US10981427B2/en active Active
- 2017-02-14 JP JP2018508535A patent/JP6900950B2/ja active Active
-
2021
- 2021-06-16 JP JP2021100504A patent/JP7124932B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004299569A (ja) * | 2003-03-31 | 2004-10-28 | Mazda Motor Corp | 自動車用制御装置 |
| JP2012088622A (ja) * | 2010-10-21 | 2012-05-10 | Fujitsu Ltd | 映像表示装置、映像表示方法、及びプログラム |
| JP2013189064A (ja) * | 2012-03-13 | 2013-09-26 | Toyota Central R&D Labs Inc | 車両制御装置及びプログラム |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11377102B2 (en) | 2017-10-30 | 2022-07-05 | Mobileye Vision Technologies Ltd. | Navigation based on sensed looking direction of a pedestrian |
| US11167756B2 (en) | 2017-10-30 | 2021-11-09 | Mobileye Vision Technologies Ltd. | Navigation based on detected response of a pedestrian to navigational intent |
| WO2019089591A1 (en) * | 2017-10-30 | 2019-05-09 | Mobileye Vision Technologies Ltd. | Vehicle navigation based on human activity |
| CN110154939A (zh) * | 2018-02-16 | 2019-08-23 | 丰田自动车株式会社 | 移动体、业务支援方法、存储介质及业务支援系统 |
| JP2019142269A (ja) * | 2018-02-16 | 2019-08-29 | トヨタ自動車株式会社 | 移動体、業務支援方法、業務支援プログラムおよび業務支援システム |
| JP7010048B2 (ja) | 2018-02-16 | 2022-01-26 | トヨタ自動車株式会社 | 移動体、業務支援方法、業務支援プログラムおよび業務支援システム |
| JP2019151290A (ja) * | 2018-03-06 | 2019-09-12 | トヨタ自動車株式会社 | 輸送システム、情報処理装置、情報処理方法、およびプログラム |
| CN110228402A (zh) * | 2018-03-06 | 2019-09-13 | 丰田自动车株式会社 | 运输系统、信息处理装置、信息处理方法及非暂时性存储介质 |
| JP7010065B2 (ja) | 2018-03-06 | 2022-01-26 | トヨタ自動車株式会社 | 輸送システム、情報処理装置、情報処理方法、およびプログラム |
| CN110641391A (zh) * | 2018-06-26 | 2020-01-03 | 上海博泰悦臻网络技术服务有限公司 | 车辆、车机设备及其车载办公环境控制方法 |
| EP3598352A1 (en) * | 2018-07-20 | 2020-01-22 | Panasonic Intellectual Property Corporation of America | Information processing method |
| EP3598353A1 (en) * | 2018-07-20 | 2020-01-22 | Panasonic Intellectual Property Corporation of America | Information processing method |
| WO2020031652A1 (ja) * | 2018-08-10 | 2020-02-13 | 日立オートモティブシステムズ株式会社 | 情報処理装置、車両制御方法、情報処理システム |
| JPWO2020039222A1 (ja) * | 2018-08-20 | 2021-09-24 | 日産自動車株式会社 | 車両管理システム及び車両管理方法 |
| JP7034300B2 (ja) | 2018-08-20 | 2022-03-11 | 日産自動車株式会社 | 車両管理システム及び車両管理方法 |
| WO2020039222A1 (ja) * | 2018-08-20 | 2020-02-27 | 日産自動車株式会社 | 車両管理システム及び車両管理方法 |
| US11748671B2 (en) | 2018-08-20 | 2023-09-05 | Nissan Motor Co., Ltd. | Vehicle management system and vehicle management method |
| WO2022064649A1 (ja) * | 2020-09-25 | 2022-03-31 | 三菱電機株式会社 | 移動体制御装置および移動体制御方法 |
| JPWO2022064649A1 (ja) * | 2020-09-25 | 2022-03-31 | ||
| JP7297166B2 (ja) | 2020-09-25 | 2023-06-23 | 三菱電機株式会社 | 移動体制御装置および移動体制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6900950B2 (ja) | 2021-07-14 |
| JPWO2017169203A1 (ja) | 2019-02-07 |
| JP7124932B2 (ja) | 2022-08-24 |
| US10981427B2 (en) | 2021-04-20 |
| JP2021167191A (ja) | 2021-10-21 |
| US20190016188A1 (en) | 2019-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7124932B2 (ja) | 制振制御装置 | |
| US12080160B2 (en) | Feedback performance control and tracking | |
| JP6773046B2 (ja) | 運転支援装置及び運転支援方法、並びに移動体 | |
| US10576994B1 (en) | Autonomous system operator cognitive state detection and alerting | |
| US10946868B2 (en) | Methods and devices for autonomous vehicle operation | |
| CN109155834B (zh) | 显示控制装置、显示控制方法、显示装置以及移动体装置 | |
| CN113596705B (zh) | 一种发声装置的控制方法、发声系统以及车辆 | |
| US20210155122A1 (en) | Apparatus and method for controlling interior of vehicle | |
| US12075231B2 (en) | Electronic device, method and computer program | |
| CN115520198A (zh) | 图像处理方法、系统和车辆 | |
| KR20240089530A (ko) | 디스플레이 방법, 디스플레이 디바이스, 스티어링 휠 및 차량 | |
| KR102212777B1 (ko) | 영상 출력 장치 | |
| JPWO2018020884A1 (ja) | 端末機器、および機器システム | |
| KR20210146891A (ko) | 정보 처리 장치 및 정보 처리 방법 | |
| US20230186651A1 (en) | Control device, projection system, control method, and program | |
| WO2018051621A1 (ja) | 通信装置、および通信システム | |
| CN114828131A (zh) | 通讯方法、介质、车载通讯系统、芯片及车辆 | |
| EP4098151A1 (en) | Seat for mobile device, seat control device, and seat control method | |
| JPWO2018070167A1 (ja) | 通信装置、および通信システム | |
| KR101892498B1 (ko) | 차량용 사용자 인터페이스 장치, 차량과 이동 단말기의 연동 시스템 | |
| WO2019167578A1 (ja) | 通信装置、および通信システム | |
| WO2018051616A1 (ja) | 通信装置、および通信システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2018508535 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17773751 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17773751 Country of ref document: EP Kind code of ref document: A1 |