WO2017081919A1 - 提示制御装置及び提示制御方法 - Google Patents
提示制御装置及び提示制御方法 Download PDFInfo
- Publication number
- WO2017081919A1 WO2017081919A1 PCT/JP2016/076242 JP2016076242W WO2017081919A1 WO 2017081919 A1 WO2017081919 A1 WO 2017081919A1 JP 2016076242 W JP2016076242 W JP 2016076242W WO 2017081919 A1 WO2017081919 A1 WO 2017081919A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control
- presentation
- vehicle
- information
- behavior change
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/085—Changing the parameters of the control units, e.g. changing limit values, working points by control input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/29—Instruments characterised by the way in which information is handled, e.g. showing information on plural displays or prioritising information according to driving conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/175—Autonomous driving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/25—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using haptic output
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/26—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using acoustic output
- B60K35/265—Voice
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
Definitions
- the present disclosure relates to a presentation control apparatus that controls an information presentation apparatus that is mounted on a vehicle and that presents information to a vehicle occupant, and a presentation control method.
- Patent Document 1 discloses a system that supports driving of a driver by collectively presenting information necessary for lane change to a driver driving the vehicle. . Specifically, in the system disclosed in Patent Document 1, for example, the direction of the lane change, whether to change the lane, whether to change the lane, the waiting time until the lane change, the acceleration / deceleration necessary for changing the lane, Information such as the position of the vehicle is presented to the driver.
- the inventor of the present disclosure has conceived that the contents of acceleration / deceleration or steering control performed by the vehicle control device are presented to the occupant in accordance with the behavior change that occurs in the vehicle. According to such presentation of the operation information of the vehicle control device, the vehicle occupant can feel relieved with respect to the control of the vehicle by the vehicle control device.
- the vehicle control device tries to control the behavior of the vehicle as gently as possible. Therefore, for example, when a large behavior change such as a lane change occurs, the information per time according to the vehicle behavior change is small. For this reason, the vehicle occupant could not imagine the magnitude of the planned behavioral change that would occur in the vehicle from the presentation of information, and could be anxious.
- This disclosure is intended to provide a presentation control device and a presentation control method capable of reducing the anxiety of a vehicle occupant whose behavior is controlled by the vehicle control device.
- a presentation control device that controls presentation of information by an information presentation device directed to an occupant of the vehicle Is a plan acquisition unit that acquires a travel plan showing the details of the vehicle control scheduled by the vehicle control device, and a control target value related to the magnitude of the behavior change included in the travel plan.
- a behavior change determination unit that determines whether or not a preceding threshold corresponding to the control target value is exceeded, and details of control performed by the vehicle control device when the control target value is less than the preceding threshold.
- the vehicle is presented to the occupant by the information presentation device, and the vehicle is based on the travel plan when the control target value exceeds the preceding threshold.
- the control content of the vehicle control device is presented to the occupant. Is temporarily preceded by a change in actual vehicle behavior. As a result, the vehicle occupant can recognize in advance the occurrence of a large behavior change by presenting information through the information presenting device.
- the information presentation shows a large change in a short time, and the content of control by the vehicle control device can be exaggerated and transmitted to the occupant. . Therefore, the occupant can easily imagine the magnitude of the planned behavior change occurring in the vehicle from the information presentation.
- the presentation control device can reduce the anxiety of the vehicle occupant whose behavior is controlled by the vehicle control device.
- a presentation control method for controlling presentation of information by an information presentation device directed to an occupant of the vehicle Obtains a travel plan showing the details of the control of the vehicle scheduled by the vehicle control device, and a control target value related to the magnitude of the behavior change included in the travel plan is the control target It is determined whether or not the preceding threshold corresponding to the value is exceeded, and when the control target value is less than the preceding threshold, the content of the control performed by the vehicle control device is matched with the behavior change that occurs in the vehicle.
- the control executed by the vehicle control device based on the travel plan when the information presenting device presents the occupant and the control target value exceeds the preceding threshold.
- the presentation including that to temporarily prior to the actual behavioral changes.
- the control content of the vehicle control device is presented to the occupant. Is temporarily preceded by a change in actual vehicle behavior. As a result, the vehicle occupant can recognize in advance the occurrence of a large behavior change by presenting information through the information presenting device.
- the information presentation shows a large change in a short time, and the content of control by the vehicle control device can be exaggerated and transmitted to the occupant. . Therefore, the occupant can easily imagine the magnitude of the planned behavior change occurring in the vehicle from the information presentation.
- the presentation control device can reduce the anxiety of the vehicle occupant whose behavior is controlled by the vehicle control device.
- FIG. 1 is a diagram showing a layout around a driver's seat in the own vehicle.
- FIG. 2 is a block diagram showing the overall configuration of the in-vehicle network.
- FIG. 3 is a diagram showing functional blocks constructed in the control circuit of the vehicle control ECU.
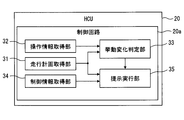
- FIG. 4 is a diagram showing functional blocks constructed in the control circuit of the HCU.
- FIG. 5 is a flowchart showing a threshold adjustment process performed by the behavior change determination unit.
- FIG. 6 is a diagram illustrating an example of a scene in which advance presentation is performed in the first embodiment.
- FIG. 7 is a diagram illustrating a correspondence relationship between vehicle behavior and each progress degree of the GUI in a scene in which advance presentation is performed.
- FIG. 8 is a diagram illustrating an example of a scene in which advance presentation is not performed in the first embodiment.
- FIG. 9 is a diagram showing a correspondence relationship between the vehicle behavior and the progress of each GUI in the scene where the prior presentation is not performed.
- FIG. 10 is a diagram illustrating another example of the scene where the preceding presentation is performed
- FIG. 11 is a diagram illustrating another example of a scene in which advance presentation is not performed.
- FIG. 12 is a flowchart showing a presentation control process performed by the control circuit of the HCU.
- FIG. 13 is a diagram illustrating an example of a scene in which advance presentation is performed in the second embodiment.
- FIG. 14 is a diagram illustrating an example of a scene in which prior presentation is not performed in the second embodiment.
- FIG. 15 is a diagram illustrating another example of a scene in which advance presentation is performed,
- FIG. 16 is a diagram illustrating another example of a scene in which advance presentation is not performed.
- An HCU (HMI (Human Machine Interface) Control Unit) 20 of the first embodiment is an electronic device mounted on the host vehicle A as shown in FIGS. 1 and 2.
- the HCU 20 is one of a plurality of nodes provided in the in-vehicle network 1 mounted on the host vehicle A.
- the in-vehicle network 1 includes an ADAS locator 96, an ITS communication device 97, an external environment recognition system 90, a vehicle control system 60, an HMI system 10, and the like. These components are connected to a communication bus 99 and can exchange information with each other by communication.
- the ADAS (Advanced Driver Assistance Systems) locator 96 includes a GNSS receiver, an inertial sensor such as a gyro sensor, and a memory for storing map data.
- a GNSS (Global Navigation Satellite System) receiver receives positioning signals from a plurality of artificial satellites.
- the ADAS locator 96 measures the position of the host vehicle A by combining the positioning signal received by the GNSS receiver and the measurement result of the inertial sensor.
- the ADAS locator 96 reads map data ahead of the host vehicle from the memory, and extracts road information such as the curvature radius of the curve, the rotation angle, and the start position.
- the ADAS locator 96 outputs the position information of the host vehicle A and road information ahead to the communication bus 99.
- An ITS (Intelligent Transport Systems) communication device 97 can exchange information by wireless communication between an in-vehicle communication device mounted on another vehicle around the host vehicle and a roadside device installed beside the road.
- the ITS communicator 97 acquires position information, travel speed information, and the like of other vehicles that travel around the vehicle through vehicle-to-vehicle communication with the in-vehicle communication device and road-to-vehicle communication with the roadside device.
- the ITS communication device 97 outputs the acquired information to the communication bus 99.
- the external environment recognition system 90 includes external sensors such as a front camera unit 92 and radar units 93 and 94, and a surrounding monitoring ECU 91.
- the outside recognition system 90 includes moving objects such as pedestrians, non-human animals, bicycles, motorcycles, and other vehicles, as well as falling objects on the road, traffic signals, guardrails, curbs, road signs, road markings, lane markings, And detecting static objects such as trees.
- the external recognition system 90 can include external sensors such as lidar and sonar in addition to the units 92 to 94.
- the front camera unit 92 is, for example, a monocular or compound eye camera installed near the rearview mirror of the host vehicle A.
- the front camera unit 92 is directed in the traveling direction of the host vehicle A, and can photograph a range of about 80 meters from the host vehicle A with a horizontal viewing angle of about 45 degrees, for example.
- the front camera unit 92 sequentially outputs captured image data showing a moving object and a stationary object to the periphery monitoring ECU 91.
- the radar unit 93 is installed, for example, at the front part of the host vehicle A.
- the radar unit 93 emits 77 GHz millimeter waves from the transmission antenna toward the traveling direction of the host vehicle A.
- the radar unit 93 receives millimeter waves reflected by a moving object and a stationary object in the traveling direction by a receiving antenna.
- the radar unit 93 can scan a range of about 60 meters from the host vehicle A at a horizontal scanning angle of about 55 degrees, for example.
- the radar unit 93 sequentially outputs the scanning result based on the received signal to the periphery monitoring ECU 91.
- the radar units 94 are installed on the left and right of the rear part of the host vehicle A, for example.
- the radar unit 94 emits a quasi-millimeter wave in the 24 GHz band from the transmitting antenna toward the rear side of the host vehicle A.
- the radar unit 94 receives a quasi-millimeter wave reflected by a moving object and a stationary object on the rear side by a receiving antenna.
- the radar unit 94 can scan a range of about 30 meters from the host vehicle A at a horizontal scanning angle of about 120 degrees, for example.
- the radar unit 94 sequentially outputs the scanning result based on the received signal to the periphery monitoring ECU 91.
- the periphery monitoring ECU 91 is mainly configured by a microcomputer or a microcontroller having a processor, a RAM, and a memory.
- the periphery monitoring ECU 91 is communicably connected to the front camera unit 92, the radar units 93 and 94, and the communication bus 99.
- the surrounding monitoring ECU 91 detects the relative positions of the moving object and the stationary object in the traveling direction by integrating the information acquired from the units 92 and 93.
- the periphery monitoring ECU 91 detects the relative positions and the like of the moving object and the stationary object at the rear and rear sides based on the information acquired from the radar unit 94.
- the perimeter monitoring ECU 91 is information on the relative position of the preceding vehicle A1 (see FIG. 6) and the parallel running vehicle that travels around the host vehicle A, information indicating the degree of congestion around the host vehicle, and a section in the traveling direction of the host vehicle A. Line shape information and the like are output to the communication bus 99 as monitoring information.
- the periphery monitoring ECU 91 determines whether or not the lane change to the adjacent lane is possible based on the detection of the parallel vehicle traveling in the adjacent lane, and outputs the determination result to the communication bus 99 as monitoring information. To do.
- the vehicle control system 60 includes a detection sensor that detects a driving operation such as an accelerator position sensor 61, a brake pedal force sensor 62, and a steering angle sensor 63, a vehicle speed sensor 64 that detects a traveling state of the host vehicle A, and the like. .
- the vehicle control system 60 includes a travel control device such as an electronic control throttle 66, a brake actuator 67, and an EPS (Electric Power Steering) motor 68, and a vehicle control ECU 70.
- the vehicle control system 60 controls the traveling of the host vehicle A based on the driving operation by the driver, the monitoring information by the external environment recognition system 90, and the like.
- the accelerator position sensor 61 detects the amount of depression of the accelerator pedal 123 by the driver and outputs it to the vehicle control ECU 70.
- the brake pedal force sensor 62 detects the pedal force of the brake pedal 124 by the driver and outputs it to the vehicle control ECU 70.
- the steering angle sensor 63 detects the steering angle of the steering wheel (hereinafter referred to as steering) 16 by the driver and outputs it to the vehicle control ECU 70.
- the driver's operation information acquired by each of these sensors 61 to 63 is output to the vehicle control ECU 70 and output to the communication bus 99 through the vehicle control ECU 70.
- the vehicle speed sensor 64 detects the current traveling speed of the host vehicle A by measuring the rotational speed of the output shaft or the axle of the transmission, and outputs it to the vehicle control ECU 70.
- the electronic control throttle 66 controls the opening of the throttle based on a control signal output from the vehicle control ECU 70.
- the brake actuator 67 controls the braking force generated on each wheel by generating a brake pressure based on a control signal output from the vehicle control ECU 70.
- the EPS motor 68 controls the steering force and the steering force applied to the steering mechanism based on a control signal output from the vehicle control ECU 70.
- the vehicle control ECU 70 is one or a plurality of types including at least an integrated control ECU among a power unit control ECU, a brake control ECU, an integrated control ECU, and the like.
- the control circuit 70a of the vehicle control ECU 70 includes a processor 71, a rewritable nonvolatile memory 73, an input / output interface 74 for inputting / outputting information, and a bus for connecting them.
- the vehicle control ECU 70 is connected to the sensors 61 to 64 and the travel control devices.
- the vehicle control ECU 70 acquires detection signals output from the sensors 61 to 64 and outputs control signals to the travel control devices.
- the vehicle control ECU 70 is connected to a communication bus 99 and can communicate with the HCU 20 and the surrounding monitoring ECU 91.
- the vehicle control ECU 70 can output detection signals from the sensors 61 to 64 to the communication bus 99.
- the vehicle control ECU 70 is capable of controlling at least one of acceleration / deceleration and steering of the host vehicle A, and has a plurality of driving support functions for supporting or acting on behalf of the driver.
- the driving support function substantially realizes automatic driving.
- the vehicle control ECU 70 executes the program stored in the memory 73 by the processor 71, so that the LTC function unit 81, the LCA function unit 82, the automatic merging function unit 83, and the travel plan setting unit 84 shown in FIG. Build as a block.
- the LTC (Lane Trace Control) function unit 81 maintains the center of the lane in which the host vehicle A (see FIG. 1) is maintained at the center of the currently running lane by generating a steering force in a direction that prevents access to the lane marking. Realize the function. In addition, the LTC function unit 81 realizes a lane departure suppression function that suppresses a departure from the lane during travel. With these functions, the LTC function unit 81 can cause the host vehicle A to travel along the lane. In addition, when overtaking a large vehicle A2 (see FIG. 8) traveling in an adjacent lane, the LTC function unit 81 performs an offset traveling that brings the host vehicle A closer to the side farther from the large vehicle A2 in the traveling lane.
- the LCA (Lane Change Assist) function unit 82 realizes a lane change support function for moving the host vehicle A (see FIG. 1) from the currently traveling lane to the adjacent lane.
- the LCA function unit 82 moves the host vehicle A to the adjacent lane by generating a steering force in the direction toward the adjacent lane.
- the automatic merging function unit 83 realizes an automatic merging function for merging the host vehicle A (see FIG. 1) traveling on the rampway or the merging lane to the main line such as an expressway.
- the automatic merging function unit 83 generates a driving force or a braking force in an acceleration lane provided along the main road, thereby causing the traveling speed of the host vehicle A to travel on the main road (travel lane).
- the vehicle is accelerated / decelerated to the traveling speed of the vehicle A3 (see FIG. 10).
- the automatic merge function unit 83 moves the host vehicle A to the adjacent lane by generating a steering force in the direction toward the main road.
- the travel plan setting unit 84 generates a travel plan for the host vehicle A (see FIG. 1) based on the monitoring information acquired from the periphery monitoring ECU 91, the ADAS locator 96, and the ITS communication device 97.
- the travel plan is information indicating the contents of acceleration / deceleration control and steering control of the host vehicle A that are scheduled to be executed by the function units 81 to 83.
- the travel plans include, for example, a short-term travel plan such as adjustment of travel speed and movement to an adjacent lane, and a medium-term travel plan obtained by combining a plurality of short-term travel plans.
- At least one of an acceleration / deceleration schedule and a steering schedule for causing the host vehicle A to travel along the planned travel locus is set.
- the acceleration / deceleration schedule defines the target acceleration TG in the front-rear direction and the target speed change amount TS as the control target value TV.
- the steering schedule defines the steering direction, the target steering angle, the total target movement amount TM in the lateral direction, and the like as the control target value TV. Based on these control target values TV defined by the travel plan setting unit 84, the functional units 81 to 83 control the behavior of the host vehicle A.
- the travel plan setting unit 84 When the travel plan setting unit 84 generates the short-term and medium-term travel plans including the control target value TV, the travel plan setting unit 84 immediately outputs the generated travel plan to the communication bus 99 (see FIG. 2). In addition, each of the functional units 81 to 83 sequentially outputs control information for acceleration / deceleration control and steering control performed based on the travel plan to the communication bus 99.
- the HMI system 10 includes a plurality of display devices such as a combination meter 12, a CID 13, and a HUD device 14 in addition to the above-described HCU 20 shown in FIGS.
- the HMI system 10 further includes an audio speaker 15, a footrest control mechanism 110, and a steering vibration mechanism 115.
- the HMI system 10 presents information to the driver of the host vehicle A seated in the driver's seat 17d and other passengers of the host vehicle A using each configuration.
- the combination meter 12 is arranged in front of the driver's seat 17d.
- the combination meter 12 displays various images for information notification on the display screen of the liquid crystal display based on the image data acquired from the HCU 20.
- the CID (Center Information Display) 13 is disposed above the center cluster in the passenger compartment of the host vehicle A.
- the liquid crystal display of the CID 13 is visible not only to the driver but also to passengers of the vehicle excluding the driver, for example, a passenger sitting on the passenger seat 17p.
- the CID 13 displays various images for information notification on the display screen of the liquid crystal display based on the image data acquired from the HCU 20.
- the HUD (Head-Up Display) device 14 projects the light of the image based on the image data acquired from the HCU 20 onto the projection area 14a (see also FIG. 5 and the like) defined in the windshield 18.
- the light of the image reflected on the vehicle interior side by the windshield 18 is perceived by the driver sitting in the driver's seat 17d.
- the driver can visually recognize the virtual image of the image projected by the HUD device 14 on the outside scene in front of the host vehicle A.
- the HUD device 14 presents information to the driver by a display object displayed as a virtual image.
- the audio speaker 15 is disposed in the lining of the door of the vehicle A.
- the audio speaker 15 is located on the side of each of the driver seat 17d and the passenger seat 17p.
- the audio speaker 15 reproduces sound or sound that can be heard by all passengers of the host vehicle A. Specifically, mechanical beep sounds such as “ping” and “beep”, synthesized speech such as messages, and the like are output from the audio speaker 15.
- the audio speaker 15 can present information for all the occupants by the sound and voice to be reproduced.
- the footrest control mechanism 110 can change the posture of the footrest 113 on which the driver's left foot is placed.
- the footrest control mechanism 110 includes an actuator 112, a footrest drive unit 111, and the like.
- the actuator 112 can change the posture of the footrest 113 from the normal reference posture.
- the footrest drive unit 111 drives the actuator 112 to incline the footrest 113 back and forth and right and left.
- the footrest driving unit 111 sets a direction in which the footrest 113 is displaced based on a control signal acquired from the HCU 20.
- the footrest control mechanism 110 can present information through the driver's sense of touch by the operation of the footrest 113.
- the steering vibration mechanism 115 is embedded in the rim portion of the steering 16.
- the steering vibration mechanism 115 generates vibration in the rim portion of the steering wheel 16 that is touched by the driver.
- the steering vibration mechanism 115 can present information through the sense of touch of the driver by vibration generated in the rim portion.
- the steering vibration mechanism 115 and the vibration frequency felt by the driver can be changed.
- the HCU 20 includes a main processor 21, a drawing processor 22, a rewritable nonvolatile memory 23, an input / output interface 24 for inputting / outputting information, and a control circuit 20a having a bus connecting them.
- the HCU 20 is connected to each display device, the audio speaker 15, the footrest control mechanism 110, the steering vibration mechanism 115, and the like.
- the HCU 20 controls the presentation of information by the information presentation device 40 including, for example, the HUD device 14, the audio speaker 15, and the footrest control mechanism 110 based on the travel plan acquired from the vehicle control ECU 70.
- the HCU 20 can notify an occupant such as a driver of the operating state of the vehicle control system 60, that is, a change in the behavior of the host vehicle A due to the driving support function.
- control circuit 20a of the HCU 20 executes the presentation control program stored in the memory 23 by each of the processors 21 and 22. Thereby, the control circuit 20a constructs the travel plan acquisition unit 31, the operation information acquisition unit 32, the behavior change determination unit 33, the control information acquisition unit 34, and the presentation execution unit 35 as functional blocks. Details of these functional blocks related to information presentation will be described below with reference to FIGS. 1 to 3 based on FIG.
- the travel plan acquisition unit 31 acquires the short-term and medium-term travel plans generated by the travel plan setting unit 84. As described above, a plurality of control target values TV related to the magnitude of the behavior change of the host vehicle A, such as the target acceleration TG in the front-rear direction, the target speed change amount TS, and the horizontal target movement amount TM, are included in the travel plan. Is included.
- the operation information acquisition unit 32 all the driving support functions by the function units 81 to 83 are stopped, and the driving information input by the driver in the state of manual driving in which the driving operation of the host vehicle A is performed by the driver. Get the transition of operation. Specifically, the operation information acquisition unit 32 continuously acquires operation information such as an acceleration / deceleration operation and a steering operation based on the detection signals of the sensors 61 to 63.
- the behavior change determination unit 33 determines whether or not a large behavior change is planned for the host vehicle A in a state where the driving support function by the function units 81 to 83 is operating. Specifically, the behavior change determination unit 33 is based on the medium-term or short-term travel plan acquired by the travel plan acquisition unit 31, and the control target value TV included in the travel plan corresponds to the control target value TV. It is determined whether or not the second threshold TH2 is exceeded (see S102 in FIG. 12). The second threshold value TH2 is set to be smaller than the control target value TV when a behavior change in which each occupant including the driver is likely to feel anxiety is performed.
- the behavior change determination unit 33 determines whether or not the control target value TV exceeds the first threshold value TH1.
- the first threshold TH1 is a value smaller than the second threshold TH2.
- the first threshold value TH1 is set in advance so as to be larger than the acceleration / deceleration or steering control target value TV implemented by the function units 81 to 83 in order to correct the behavior change of the host vehicle A caused by disturbance. Has been.
- the behavior change determination unit 33 stores a first threshold value TH1 and a second threshold value TH2 respectively corresponding to each control target value TV.
- two acceleration thresholds THG1 and THG2 are set in order to evaluate the magnitude of the target acceleration TG in the front-rear direction.
- two speed difference thresholds THS1 and THS2 are set in order to evaluate the magnitude of the target speed change amount TS.
- two movement amount thresholds THM1 and THM2 are set.
- the behavior change determination unit 33 appropriately adjusts each second threshold value TH2 (THG2, THM2, THM2) based on the driver operation information acquired by the operation information acquisition unit 32 according to the characteristics of the driver. .
- a threshold adjustment process is repeatedly performed when the host vehicle A is in a manual driving state.
- the behavior change determination unit 33 refers to the driver's operation information sequentially acquired by the operation information acquisition unit 32 (see S10 in FIG. 5), and the driver's driving based on the acquired operation information. The characteristics are evaluated (see S11 in FIG. 5).
- each second threshold value TH2 is adjusted to a value higher than the initially set standard value.
- each second threshold value TH2 is adjusted to a value lower than the standard value (see S12 in FIG. 5).
- the control information acquisition unit 34 in a state in which the behavior of the host vehicle A is controlled by the function units 81 to 83, each control information of acceleration / deceleration control and steering control sequentially output from the function units 81 to 83, Get in real time.
- the presentation execution unit 35 Based on the travel plan acquired by the travel plan acquisition unit 31 and the control information acquired by the control information acquisition unit 34, the presentation execution unit 35 displays the operating state of the driving support function by the function units 81 to 83 as driving. Present to the person sequentially. Specifically, the presentation execution unit 35 presents the details of the control performed by each of the functional units 81 to 83 to the driver by changing the aspect of the control status image 50 displayed as a virtual image by the HUD device 14. To do. In addition to such display, the presentation executing unit 35 changes the content of the control performed by each of the function units 81 to 83 by changing at least one of the frequency and volume of the sound output from the audio speaker 15. To present. In addition, the presentation execution unit 35 changes the posture of the footrest 113 to present the driver with the details of the control performed by the function units 81 to 83.
- the presentation execution unit 35 changes the method of presenting the control content to the driver based on the determination result of the behavior change determination unit 33. Specifically, in a normal state where no significant behavior change is planned, the presentation execution unit 35 adjusts the content of the control performed by each of the functional units 81 to 83 to the driver according to the behavior change that occurs in the host vehicle A. To present. On the other hand, when a large behavior change is scheduled for the host vehicle A, the presentation executing unit 35 temporarily precedes the actual behavior change with the presentation of the control contents performed by the function units 81 to 83. Let Further, when the behavior change scheduled for the host vehicle A is a slight change such as correcting a disturbance, the presentation executing unit 35 reflects the control contents executed by the function units 81 to 83 in the presentation. I will not let you.
- the control status image 50 includes a plurality of lane marking image portions 51a to 51c, an arrow image portion 52, and the like.
- the control status image 50 is a GUI (Graphical User Interface) for notifying the vehicle behavior by displaying a plurality of still images divided into frames in order.
- the lane marking image portions 51a to 51c are image portions showing lane markings on both sides of the host vehicle recognized by the periphery monitoring ECU 91.
- the arrow image part 52 is an image part showing behavior of the host vehicle A such as acceleration / deceleration and movement in the lateral direction.
- the movements of the arrow image unit 52 and the footrest 113 for presenting information are standardized in advance for lateral movement and acceleration / deceleration as described later.
- the tip of the arrow image unit 52 slides in the lateral direction and the footrest 113 tilts in the lateral direction in synchronization with the behavior of the host vehicle A.
- the arrow image unit 52 expands and contracts in the vertical direction, and the footrest 113 tilts in the front-rear direction.
- the arrow image unit 52 and the footrest 113 can temporarily present the contents of the control scheduled in each of the function units 81 to 83 with respect to the actual behavior change.
- the driver since the movements of the arrow image unit 52 and the footrest 113 are standardized, from the movement of the arrow image unit 52 and the footrest 113 whose steps (degree of progress) are earlier than in the case of synchronization, the driver takes the lead. It becomes possible to determine that the presentation is being performed.
- the scene shown in FIG. 6 is a scene that overtakes the preceding vehicle A1 that travels at a lower speed than the own vehicle A by the control of the own vehicle A by the LCA function unit 82.
- the travel plan setting unit 84 generates a short-term travel plan for moving the host vehicle A to the overtaking lane adjacent to the right side in order to overtake the preceding vehicle A1.
- the behavior change determination unit 33 determines that the lateral target movement amount TM (lane width for one lane) exceeds the movement amount threshold value THM2 with respect to the travel plan for changing lanes. Therefore, in at least a part of the period (t1 to t4) in which the lane change is performed, the content of control by the LCA function unit 82 is temporarily presented in advance with respect to the actual behavior change.
- the vehicle behavior and the degree of progress of the GUI will be described in order along the time series.
- the changes in the modes of the lane marking image units 51a and 51b and the arrow image unit 52 are synchronized with the behavior change of the host vehicle A or Following.
- an arrow image portion 52 that extends linearly along the vertical direction is positioned between the two lane marking image portions 51a and 51b.
- the audio speaker 15 outputs sound for notifying the operation of the LCA function unit 82.
- the footrest control mechanism 110 links the left and right movements of the footrest 113 with the steering of the host vehicle A.
- the control status image 50 starts the advance presentation of the control content scheduled to be implemented by the LCA function unit 82 from the timing (t1) when the LCA function unit 82 starts steering control based on the travel plan.
- the advance presentation is performed halfway through the lane change implementation period (t1 to t4).
- the advance presentation is temporarily limited to the period (t1 to t3) until the host vehicle A crosses the right lane marking.
- the control status image 50 moves the position of the tip (upper end) in the horizontal direction (rightward) while maintaining the position of the base end (lower end) of the arrow image portion 52.
- the arrow image part 52 is deformed into a bent shape.
- the control status image 50 causes the arrow image portion 52 to straddle the right lane marking image portion 51b at a timing (t2) earlier than the own vehicle A actually straddles the right lane marking.
- the arrow image portion 52 is transformed into a mode in which the tip is positioned between the two lane marking image portions 51b and 51c that divide the passing lane on the display.
- the control status image 50 indicates the arrival position of the host vehicle A by the position of the tip, and notifies the driver of the result of the behavior change of the host vehicle A accompanying the lane change.
- the control status image 50 maintains the aspect of the arrow image portion 52 straddling the lane marking image portion 51b until the own vehicle A actually crosses the lane marking (t3). In addition, during this period (t2 to t3), the frequency or volume of the sound from the audio speaker 15 and the posture of the footrest 113 are kept constant.
- the control status image 50 adds the position of the base end of the arrow image portion 52 on the display in accordance with the movement of the own vehicle A in the lateral direction. Move sideways (to the right) toward the crossing lane.
- the arrow image unit 52 returns to a linear form reflecting the behavior of the host vehicle A that goes straight.
- the frequency or volume of the sound from the audio speaker 15 is gradually returned to the state before the change.
- the posture of the footrest 113 is gradually returned from the state inclined rightward to the reference position.
- the control status image 50 skips the frame representing the movement between t1 and t2 at the start timing (t1) of the steering control, and moves the arrow image portion 52 from the t1 mode to the t2 mode. It may be changed in an instant (see FIG. 7, two-dot chain line).
- the control status image 50 does not stop the arrow image portion 52 between t2 and t3, but moves more slowly between t2 and t3 than between t1 and t2. The mode may be changed (see the dashed line in FIG. 7).
- the next scene shown in FIG. 8 is a scene in which the large vehicle A2 traveling in the adjacent lane is overtaken by the control of the host vehicle A by the LTC function unit 81.
- the travel plan setting unit 84 generates a short-term travel plan that brings the travel position of the host vehicle A to the right side in the lane when overtaking the large vehicle A2.
- anxiety of each occupant including the driver is reduced.
- the behavior change determination unit 33 determines that the lateral target movement amount TM is equal to or less than the movement amount threshold value THM2 and exceeds the movement amount threshold value THM1 for the travel plan for performing such offset traveling.
- control content of the LCA function unit 82 is reflected in the control status image 50 throughout the period (t1 to t4) in which the offset of the own vehicle A is performed, and the movement of the control status image 50 is Synchronize or follow A behavior change.
- the control status image 50 is an arrow image at the timing (t1) when the LTC function unit 81 starts control of steering for offset based on the travel plan.
- the tip of the portion 52 is moved slightly in the lateral direction (rightward).
- the arrow image portion 52 has a form in which the tip is brought close to the right lane marking image portion 51c.
- the footrest control mechanism 110 slightly tilts the footrest 113 from the reference position to the right.
- the control status image 50 moves the position of the base end of the arrow image portion 52 to the right.
- the arrow image unit 52 is synchronized with the behavior of the host vehicle A that travels straight, and has a linear shape that is closer to the right lane line image unit 51c than the left lane line image unit 51b.
- the footrest control mechanism 110 returns the footrest 113 to the reference position.
- the following scenes shown in FIGS. 10 and 11 are scenes in which the own vehicle A traveling on the ramp or the merge lane is merged with a main road such as an expressway by the control of the own vehicle A by the automatic merge function unit 83.
- the travel plan setting unit 84 uses the ITS communicator 97 to obtain the position information and travel speed information of the other vehicle A3 traveling on the main line, the inter-vehicle communication with the vehicle A3, or the road-vehicle communication with the roadside device. Get in.
- the travel plan setting unit 84 acquires the length of the acceleration section attached to the main road from the road information from the ADAS locator 96.
- the travel plan setting unit 84 uses these pieces of information to generate a medium-term travel plan for joining the host vehicle A to the main road and a short-term travel plan for adjusting the travel speed of the host vehicle A before joining.
- the behavior change determination unit 33 causes the target acceleration TG (0.2 G) in the front-rear direction to exceed the acceleration threshold THG2 (for example, 0.15 G) for a short-term travel plan for accelerating the host vehicle A in a short acceleration section. It is determined that Therefore, in at least a part of the period (t1 to t4) in which the acceleration of the host vehicle A is performed, the control content by the automatic merging function unit 83 is temporarily presented in advance with respect to the actual behavior change.
- the vehicle behavior and the degree of progress of the GUI will be described in order along the time series.
- a change in the state of the arrow image unit 52, a change in sound by the audio speaker 15, and a change in the posture of the footrest 113 are Synchronize or follow changes in behavior.
- the arrow image unit 52 is arranged at the center of the two lane marking image units 51a and 51b, and indicates the traveling speed of the host vehicle A by the length along the vertical direction.
- the control status image 50 starts the advance presentation of the control content scheduled to be implemented by the automatic merging function unit 83 from the timing (t1) when the automatic merging function unit 83 starts acceleration control based on the travel plan.
- the prior presentation is performed halfway through the acceleration execution period (t1 to t4) and is temporarily performed only during the period (t1 to t3) until the traveling speed of the host vehicle A reaches the target intermediate speed.
- the target intermediate speed is set between the target arrival speed, which is the target achieved in the short-term travel plan, and the current travel speed.
- the control status image 50 moves the position of the distal end upward while maintaining the position of the proximal end of the arrow image portion 52.
- the arrow image part 52 is deformed into a shape extending along the vertical direction.
- the control status image 50 extends the arrow image portion 52 to a length corresponding to the target intermediate speed at a timing (t2) earlier than the traveling speed of the host vehicle A reaches the target intermediate speed. Due to such a change in the length of the arrow image portion 52, the control status image 50 notifies the driver of the execution of strong acceleration. In addition, during this period (t1 to t2), at least one of the frequency and volume of the sound from the audio speaker 15 is remarkably increased as the prior presentation of the control contents, and the footrest 113 is remarkably tilted forward from the reference position. It is.
- the control status image 50 maintains the length of the arrow image portion 52 until the timing (t3) when the traveling speed of the host vehicle A actually reaches the target intermediate speed. In addition, during this period (t2 to t3), the frequency or volume of the sound from the audio speaker 15 and the posture of the footrest 113 are maintained constant.
- the control status image 50 moves the position of the upper end of the arrow image unit 52 further upward in accordance with the acceleration of the host vehicle A.
- the arrow image unit 52 extends to a length reflecting the travel speed of the host vehicle A.
- the frequency or volume of the sound from the audio speaker 15 is further increased.
- the footrest control mechanism 110 tilts the footrest 113 further forward.
- the control status image 50 skips the frame representing the movement between t1 and t2 at the acceleration control start timing (t1), and moves the arrow image portion 52 from the t1 mode to the t2 mode. Alternatively, it may be changed for a moment (see the two-dot chain line in FIG. 7). As yet another modification, the control status image 50 does not stop the arrow image unit 52 between t2 and t3, but moves the arrow image unit 52 between t2 and t3 with a slower movement than between t1 and t2. You may make it extend
- the behavior change determination unit 33 determines that the target acceleration TG (for example, 0.1 G) in the front-rear direction is equal to or less than the acceleration threshold value THG2 with respect to a short-term travel plan for accelerating the host vehicle A in a long acceleration section. It is determined that THG1 is exceeded.
- the control content of the automatic joining function unit 83 is reflected in the control status image 50 over the entire period (t1 to t4) in which the host vehicle A is accelerated, and the movement of the control status image 50 is Synchronize with or follow the behavior change of the vehicle A.
- the control status image 50 is displayed at the tip of the arrow image unit 52. Starts moving upward.
- the arrow image unit 52 is gradually enlarged in the vertical direction as the traveling speed of the host vehicle A increases.
- the arrow image unit 52 extends to a length reflecting the travel speed of the host vehicle A.
- the frequency or volume of the sound reproduced from the audio speaker 15 is gradually increased. Furthermore, the footrest control mechanism 110 gradually tilts the footrest 113 forward from the reference position.
- whether or not to perform the advance presentation is determined based on the target acceleration TG, but may be determined based on the target speed change amount TS. Specifically, when the behavior change determination unit 33 determines that the target speed change amount TS exceeds the speed difference threshold value THS2, advance presentation is performed. On the other hand, when it is determined that the target speed change amount TS is equal to or less than the speed difference threshold THS2 and exceeds the speed difference threshold THS1, the progress of the GUI is matched to the progress of the vehicle control.
- each of the functional units 81 to 83 can temporarily interrupt control such as lane change and acceleration / deceleration due to the situation of other vehicles traveling around and the override by the driver.
- steps such as GUI are also put on hold in accordance with vehicle behavior.
- the GUI by the HUD device 14 is temporarily switched from the control status image 50 to a message image that notifies the suspension of control.
- a message sound for notifying that control is on hold is reproduced by the audio speaker 15.
- the GUI information presentation is returned from the message image to the control status image 50 immediately before switching, and is synchronized with the behavior of the host vehicle A again.
- the message sound for notifying the cancellation of the hold is reproduced by the audio speaker 15.
- the GUI is switched from the control status image 50 being the advance presentation to the message image. Then, when the progress of the vehicle control is resumed, the GUI is returned to the control status image 50 immediately before switching, which was being presented in advance.
- the GUI temporarily interrupts the previous presentation that was being performed and resumes the information presentation by the control status image 50 in a state synchronized with the behavior of the host vehicle A. It is also possible.
- the GUI step resumed in synchronism with the vehicle control is returned again to the state preceding the vehicle control step.
- the presentation control process shown in FIG. 12 is performed by the control circuit 20a when one of the functional units 81 to 83 is activated in the vehicle control ECU.
- the presentation control process is repeatedly performed by the control circuit 20a until all the functional units 81 to 83 are stopped.
- the travel plan acquisition unit 31 acquires the travel plan generated by the travel plan setting unit 84, and the process proceeds to S102.
- S102 whether each control target value TV (TG, TS, TM) included in the travel plan acquired in S101 by the behavior change determination unit 33 exceeds each second threshold value TH2 (THG2, THS2, THM2). Determine whether or not.
- THG2, THS2, THM2 second threshold value
- S104 the presentation of the control content by the HUD device 14, the audio speaker 15, and the footrest control mechanism 110 is temporarily preceded by the actual behavior change of the host vehicle A, and the process proceeds to S105.
- S105 it is determined whether or not the progress of the control of the host vehicle A has reached the progress of the presentation preceded in S104.
- S105 the determination is repeated to wait for the vehicle control to progress. Then, based on the fact that the actual vehicle control has caught up with the preceding presentation, the process proceeds to S107.
- the control contents of the respective functional units 81 to 82 are presented to the driver as the actual behavior change of the own vehicle A. Is temporarily preceded.
- the driver or the like can recognize in advance the occurrence of a large behavior change by presenting information through the information presentation device 40.
- the information presentation such as the GUI shows a large change in a short time, and the contents of control by the function units 81 to 83 are exaggerated. I can tell the driver. Therefore, the driver can easily imagine the magnitude of the planned behavior change occurring in the host vehicle A from the information presentation.
- the HCU 20 can reduce the driver's anxiety in the own vehicle A whose behavior is controlled by the functional units 81 to 83.
- the presentation of the control content is synchronized with the actual vehicle behavior from a point just before the end of the series of behavior changes based on the travel plan (see t3 in FIG. 7). Therefore, the driver can quickly grasp that a series of behavior changes will soon end based on the synchronization of the presentation contents such as the GUI with the vehicle behavior.
- the advance presentation is started from the time when acceleration / deceleration or steering control based on the travel plan is started (see t1 in FIG. 7). Therefore, based on the remarkable change of the information presentation device 40, the driver can easily grasp the timing when the control of the vehicle behavior is started.
- the behavior change determination unit 33 appropriately generates a large behavior change that causes the driver to feel uneasy based on the longitudinal acceleration and the lateral movement amount that are scheduled to occur in the host vehicle A. Can be determined. Therefore, the HCU 20 can reduce the driver's anxiety by reliably performing the prior presentation of the control contents in a scene where the driver is likely to feel anxiety.
- the behavior change determination unit 33 of the first embodiment can adjust the second threshold TH2 in accordance with the driving characteristics of the driver.
- the HCU 20 can reduce the driver's anxiety by surely performing the control contents in advance in a scene where the individual driver is likely to feel anxiety.
- the HCU 20 when the control target value TV is lower than the first threshold value TH1, the HCU 20 does not reflect the control contents scheduled to be performed by the function units 81 to 83 in the information presentation. Therefore, a slight behavior change that corrects the disturbance generated by each of the functional units 81 to 83 is not notified to the driver. Therefore, the situation where the driver feels troublesome to present information related to the behavior change is avoided.
- the control contents scheduled to be implemented by the function units 81 to 83 are reliable. Will be recognized by the driver.
- the HUD device 14 corresponds to a “display”
- the audio speaker 15 corresponds to a “sound output device”
- the footrest 113 corresponds to a “foot rest”
- the HCU 20 performs “presentation control”. It corresponds to "apparatus”.
- the travel plan acquisition unit 31 corresponds to a “plan acquisition unit”
- the operation information acquisition unit 32 corresponds to an “operation acquisition unit”
- the control status image 50 corresponds to a “display object”
- the vehicle control ECU 70 sets “ It corresponds to a “vehicle control device”.
- the first threshold TH1 corresponds to the “reflection threshold”
- the second threshold TH2 corresponds to the “preceding threshold”.
- the driver who controls the own vehicle A during manual driving is also referred to as “driver” for the sake of convenience during automatic driving.
- This driver mainly corresponds to the “occupant”.
- a driver during automatic driving may be obliged to monitor or may not be obliged to monitor.
- a control status image 250 of the second embodiment shown in FIGS. 13 to 16 is a modification of the first embodiment.
- the control status image 250 includes a flying object image portion 252 as a display element corresponding to the arrow image portion 52 (see FIG. 8 and the like) of the first embodiment.
- the flying object image unit 252 is displayed in a manner slightly floating from the virtual road surface on the display expressed by the lane marking image units 51a to 51c.
- the flying object image part 252 is an image part in which a pair of triangular figures are arranged symmetrically.
- the scene shown in FIG. 13 is a scene that overtakes the preceding vehicle A1 as in FIG. 6, and is a case where the behavior change determination unit 33 determines that the lateral target movement amount TM exceeds the movement amount threshold THM2. is there.
- the control status image 250 starts prior presentation of the control contents from the timing (t1) when the steering control is started by the LCA function unit 82. Also in the second embodiment, advance presentation is performed only during a period (t1 to t3) until the host vehicle A crosses the right lane marking.
- the control status image 250 rotates the flying object image part 252 clockwise at the timing (t1) when the steering control is started, and moves the tip of the flying object image part 252 to the right side. Then, at a timing (t2) earlier than the own vehicle A actually crosses the right lane line, the control status image 250 straddles the flying object image portion 252 over the right lane line image portion 51b. As a result, the flying object image unit 252 has a mode in which the tip is positioned between the two lane marking image portions 51b and 51c that divide the passing lane on the display, and the destination of the own vehicle A is directed to the driver. Notice.
- the control status image 250 maintains the form of the flying object image portion 252 straddling the lane marking image portion 51b until the own vehicle A actually straddles the lane marking (t3).
- the control status image 250 moves the position of the flying object image unit 252 further to the right in accordance with the movement of the host vehicle A in the lateral direction.
- the flying object image portion 252 is displayed at the center of the two lane marking image portions 51b and 51c.
- the flying object image unit 252 is returned to a posture in which the tip is directed upward so as to reflect the behavior of the vehicle A traveling straight.
- the next scene shown in FIG. 14 is a scene that overtakes the large vehicle A2 traveling in the adjacent lane in the same manner as in FIG.
- the behavior change determination unit 33 determines that the lateral target movement amount TM is equal to or less than the movement amount threshold THM2 and exceeds the movement amount threshold THM1.
- the control status image 250 reflects the control content of the LTC function unit 81 over the entire period (t1 to t4) during which the host vehicle A is offset, and the movement of the flying object image unit 252 is reflected in the host vehicle A. Synchronize or follow changes in behavior.
- the control status image 250 is obtained by rotating the flying object image unit 252 clockwise at a timing (t1) when the LTC function unit 81 starts steering control for offset based on the travel plan. Move the tip slightly laterally (to the right). As a result, during the period (t1 to t2) when the host vehicle A is approaching the right lane marking, the flying object image portion 252 has a form in which the tip is brought close to the right lane marking image portion 51c.
- the flying object image unit 252 returns to a posture in which the tip is directed upward by rotating counterclockwise. At this time, the flying object image portion 252 is displayed at a position closer to the right lane marking image portion 51c than to the left lane marking image portion 51b.
- the next scene shown in FIG. 15 is a scene where the host vehicle A joins the main road as in FIG. 10, and the behavior change determination unit 33 determines that the target acceleration TG in the front-rear direction exceeds the acceleration threshold THG2. This is the case.
- the control status image 250 starts the advance presentation of the control contents from the timing (t1) when the acceleration control is started by the automatic merging function unit 83. Also in the second embodiment, the advance presentation is performed only during the period (t1 to t3) until the traveling speed of the host vehicle A exceeds the target intermediate speed.
- the control status image 250 indicates the traveling speed of the host vehicle A by the relative position in the vertical direction of the flying object image unit 252 with respect to the lane marking image units 51a and 51b. Therefore, the control status image 250 starts the upward movement of the flying object image unit 252 from the timing (t1) when the acceleration control is started. As a result, the flying object image unit 252 completes the movement to the position corresponding to the target intermediate speed at a timing (t2) earlier than the traveling speed of the host vehicle A reaches the target intermediate speed. The control status image 250 notifies the driver of the strong acceleration scheduled for the host vehicle A by the remarkable movement of the flying object image unit 252.
- the control status image 250 maintains the display position of the flying object image unit 252 until the timing (t3) when the traveling speed of the host vehicle A reaches the target intermediate speed.
- the control status image 250 moves the position of the flying object image unit 252 further in accordance with the acceleration of the host vehicle A.
- the flying object image unit 252 is displayed at a position reflecting the current travel speed of the host vehicle A that has reached the target arrival speed.
- the next scene shown in FIG. 16 is a scene where the host vehicle A joins the main road as in FIG.
- the behavior change determination unit 33 determines that the longitudinal target acceleration TG is equal to or less than the acceleration threshold THG2 and exceeds the acceleration threshold THG1.
- the control status image 250 reflects the control content of the automatic merging function unit 83 and the movement of the flying object image unit 252 over the entire period (t1 to t4) in which the host vehicle A is accelerated. Synchronize or follow the behavior change of A.
- the control status image 250 starts the upward movement of the flying object image unit 252 from the timing (t1) when acceleration control is started based on the travel plan. Then, during a period (t1 to t3) until the traveling speed of the host vehicle A reaches the target arrival speed, the control status image 250 is displayed in the display position of the flying object image unit 252 as the traveling speed of the host vehicle A increases. Is gradually moved upward. As a result, at the timing (t4) when the acceleration based on the travel plan ends, the flying object image unit 252 is displayed at a position reflecting the current travel speed of the host vehicle A that has reached the target arrival speed.
- control status image 250 corresponds to a “display object”.
- the prior presentation by the said embodiment was temporarily implemented until the middle of a series of vehicle control based on one travel plan.
- the timing (see t3 in FIG. 6) at which the preceding presentation is ended may be set as appropriate.
- the prior presentation may be performed during the entire period of a series of vehicle controls based on one travel plan.
- the preceding presentation according to the above embodiment was started simultaneously with the timing (see t1 in FIG. 6) at which specific vehicle control by each of the functional units 81 to 83 is started.
- the start timing of prior presentation may be made earlier than the start timing of vehicle control. According to such presentation, the driver can recognize the occurrence of a large behavior change at an earlier stage.
- the start timing of the advance presentation may be set after the start timing of the vehicle control. According to such presentation, a change in the mode of information presentation can become more prominent. Therefore, the driver can surely recognize the occurrence of a large behavior change.
- the longitudinal acceleration, the speed difference to the target traveling speed, the amount of movement in the lateral direction, and the like are used as values for evaluating the magnitude of the behavior change.
- the behavior change determination unit can determine the magnitude of the behavior change using other values.
- the behavior change determination unit may evaluate the magnitude of the planned behavior change on the basis of the magnitude of the lateral acceleration and the forward / backward jerk.
- the behavior change determination unit may be configured to evaluate the magnitude of the behavior change using a machine-learned determiner instead of evaluating the magnitude of the behavior change using an individual threshold. .
- the acceleration threshold value THG2 as the second threshold value TH2 is set so that the advance presentation is performed, for example, by performing acceleration of about 0.2G. Further, the movement amount threshold value THM2 as the second threshold value TH2 is set so that the advance presentation is performed by performing the horizontal movement across the lane marking.
- each of these threshold values can be changed as appropriate.
- the absolute value of the acceleration threshold value THG2 when the deceleration control is performed may be different from the absolute value of the acceleration threshold value THG2 when the deceleration control is performed.
- the second threshold value TH2 has been realized by monitoring the driving operation during manual driving.
- personal adaptation may be omitted.
- the second threshold value may be adjusted according to the driver's preference by the driver's input to the steering switch 16a (see FIG. 1).
- the first threshold value TH1 that omits the reflection of the control content to the information presentation is provided, but such a first threshold value TH1 may not be provided. Furthermore, the details of minute vehicle control may not be reflected in the information presentation by being omitted from the travel plan output to the communication bus.
- control content of each functional unit is presented to the driver by a combination of the virtual image display by the HUD device 14, the sound presentation by the audio speaker 15, and the tactile sense presentation by the footrest control mechanism 110.
- control content may be presented to the driver using only one of these.
- the configuration for displaying the control status image is not limited to the HUD device 14, but may be the combination meter 12, the CID 13, or the like.
- the configuration for displaying the control status image may not be a display device installed in the vehicle.
- the control status image may be displayed on a screen of a mobile terminal brought into the vehicle by a driver or the like.
- the travel plan setting unit 84 of the vehicle control ECU 70 generates a travel plan.
- the travel plan may be generated outside the host vehicle A and transmitted to the vehicle control ECU 70.
- the position information and the traveling speed information of other vehicles are acquired by the inter-vehicle communication and the road-to-vehicle communication by the ITS communication device 97, but the ITS communication device 97 may be omitted. Even with the outside world recognition system 90 alone, information on other vehicles around the host vehicle can be acquired with sufficient accuracy and accuracy.
- the functional units 81 to 83 are exemplified as the functional blocks for automatic driving constructed in the vehicle control ECU 70.
- the functional blocks constructed in the vehicle control ECU are not limited to these.
- an ACC (Adaptive Cruise Control) function unit, an LKA (Lane Keeping Assist) function unit, and the like may be built in the vehicle control ECU.
- These functional units may be activated based on an input from the driver to the steering switch 16a (see FIG. 1), or activated when the host vehicle A enters a specific automatic driving area. May be.
- the functions provided by the main processor 21 and the drawing processor 22 of the HCU 20 can be provided by hardware and software different from those described above, or a combination thereof.
- the control circuit of the vehicle control ECU, the control circuit of the combination meter, the control circuit of the CID, etc. may execute part or all of the presentation control processing.
- each function may be provided by hardware and software different from those described above, or a combination thereof.
- various non-transitional physical storage media such as a flash memory and a hard disk can be adopted as a memory for storing programs executed by the processors 21 and 22.
- each section is expressed as S10, for example.
- each section can be divided into a plurality of subsections, while a plurality of sections can be combined into one section.
- each section configured in this manner can be referred to as a device, module, or means.
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/774,189 US10647331B2 (en) | 2015-11-09 | 2016-09-07 | Presentation control device and presentation control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015219722A JP6439657B2 (ja) | 2015-11-09 | 2015-11-09 | 提示制御装置及び提示制御方法 |
| JP2015-219722 | 2015-11-09 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017081919A1 true WO2017081919A1 (ja) | 2017-05-18 |
Family
ID=58695162
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/076242 Ceased WO2017081919A1 (ja) | 2015-11-09 | 2016-09-07 | 提示制御装置及び提示制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10647331B2 (https=) |
| JP (1) | JP6439657B2 (https=) |
| WO (1) | WO2017081919A1 (https=) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020066360A (ja) * | 2018-10-25 | 2020-04-30 | パイオニア株式会社 | 表示制御装置、表示制御方法及び表示制御用プログラム |
| WO2020203066A1 (ja) * | 2019-04-01 | 2020-10-08 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| WO2023100698A1 (ja) * | 2021-12-02 | 2023-06-08 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| JP2023082664A (ja) * | 2021-12-02 | 2023-06-14 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7113259B2 (ja) * | 2017-06-30 | 2022-08-05 | パナソニックIpマネジメント株式会社 | 表示システム、表示システムを備える情報提示システム、表示システムの制御方法、プログラム、及び表示システムを備える移動体 |
| JP6596772B2 (ja) | 2017-09-01 | 2019-10-30 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP6968258B2 (ja) * | 2018-03-08 | 2021-11-17 | 三菱電機株式会社 | 運転支援装置および運転支援方法 |
| JP7183555B2 (ja) * | 2018-03-22 | 2022-12-06 | 株式会社リコー | 表示装置、移動体、表示方法、及びプログラム |
| JP6962468B2 (ja) * | 2018-06-29 | 2021-11-05 | 日産自動車株式会社 | 走行支援方法及び車両制御装置 |
| DE112019004143T5 (de) * | 2018-08-17 | 2021-06-10 | Sony Corporation | Informationsverarbeitungsvorrichtung, informationsverarbeitungssystem, informationsverarbeitungsverfahren und programm |
| CN112638749B (zh) * | 2018-09-07 | 2023-03-24 | 日产自动车株式会社 | 车辆的行驶控制方法及行驶控制装置 |
| JP2020095565A (ja) * | 2018-12-14 | 2020-06-18 | トヨタ自動車株式会社 | 情報処理システム、プログラム、及び情報処理方法 |
| JP7268481B2 (ja) * | 2019-05-22 | 2023-05-08 | トヨタ自動車株式会社 | 情報処理装置、自律走行車両、情報処理方法及びプログラム |
| JP7303666B2 (ja) | 2019-05-29 | 2023-07-05 | 日立Astemo株式会社 | 車両制御装置、車両制御方法および車両制御システム |
| WO2021079497A1 (ja) * | 2019-10-25 | 2021-04-29 | ヤマハ発動機株式会社 | リーン車両用リアルタイム情報提示制御装置 |
| JP7375476B2 (ja) * | 2019-11-01 | 2023-11-08 | 株式会社デンソー | 車両の報知システム、プログラム |
| JP2022048538A (ja) * | 2020-09-15 | 2022-03-28 | 株式会社東海理化電機製作所 | 制御装置、制御方法、及びプログラム |
| JP7359127B2 (ja) * | 2020-10-20 | 2023-10-11 | トヨタ自動車株式会社 | 自動運転システム |
| JP7355057B2 (ja) * | 2021-03-24 | 2023-10-03 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| JP7767738B2 (ja) * | 2021-06-01 | 2025-11-12 | マツダ株式会社 | ヘッドアップディスプレイ装置 |
| US20230035533A1 (en) * | 2021-07-29 | 2023-02-02 | Transportation Ip Holdings, Llc | Vehicle control system and method |
| CN116409336A (zh) * | 2021-12-30 | 2023-07-11 | 魔门塔(苏州)科技有限公司 | 基于经验路段的自动驾驶速度规划方法、装置、介质 |
| CN116409338A (zh) * | 2021-12-30 | 2023-07-11 | 魔门塔(苏州)科技有限公司 | 基于坡度的自动驾驶速度规划方法、装置、介质及设备 |
| US12546606B2 (en) * | 2022-07-14 | 2026-02-10 | Qualcomm Incorporated | User interface-assisted vehicle positioning |
| JP2024112710A (ja) * | 2023-02-08 | 2024-08-21 | トヨタ自動車株式会社 | 車両用表示装置、車両用表示方法、及び車両用表示プログラム |
| WO2025105348A1 (ja) * | 2023-11-17 | 2025-05-22 | 本田技研工業株式会社 | 運転支援装置、運転支援方法、及びプログラム |
| JP2025134421A (ja) * | 2024-03-04 | 2025-09-17 | トヨタ自動車株式会社 | 車載表示システム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005201763A (ja) * | 2004-01-15 | 2005-07-28 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2006500593A (ja) * | 2002-09-27 | 2006-01-05 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | ナビゲーション装置 |
| JP2009061878A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 走行制御装置 |
| JP2012061944A (ja) * | 2010-09-15 | 2012-03-29 | Toyota Motor Corp | 車両の制御装置 |
| JP2013237290A (ja) * | 2012-05-11 | 2013-11-28 | Toyota Motor Corp | 表示制御装置、車両制御装置および車両 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2989740B2 (ja) * | 1994-03-31 | 1999-12-13 | 富士通テン株式会社 | 経路案内方法 |
| US7202776B2 (en) * | 1997-10-22 | 2007-04-10 | Intelligent Technologies International, Inc. | Method and system for detecting objects external to a vehicle |
| JP4639951B2 (ja) * | 2005-05-19 | 2011-02-23 | トヨタ自動車株式会社 | 運転支援装置 |
| SG172499A1 (en) | 2009-12-23 | 2011-07-28 | Rokko Systems Pte Ltd | Assembly and method for ic unit engagement |
| JP5806733B2 (ja) | 2011-05-20 | 2015-11-10 | 本田技研工業株式会社 | 車線変更支援情報可視化システム |
-
2015
- 2015-11-09 JP JP2015219722A patent/JP6439657B2/ja active Active
-
2016
- 2016-09-07 US US15/774,189 patent/US10647331B2/en active Active
- 2016-09-07 WO PCT/JP2016/076242 patent/WO2017081919A1/ja not_active Ceased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006500593A (ja) * | 2002-09-27 | 2006-01-05 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | ナビゲーション装置 |
| JP2005201763A (ja) * | 2004-01-15 | 2005-07-28 | Alpine Electronics Inc | ナビゲーション装置 |
| JP2009061878A (ja) * | 2007-09-05 | 2009-03-26 | Toyota Motor Corp | 走行制御装置 |
| JP2012061944A (ja) * | 2010-09-15 | 2012-03-29 | Toyota Motor Corp | 車両の制御装置 |
| JP2013237290A (ja) * | 2012-05-11 | 2013-11-28 | Toyota Motor Corp | 表示制御装置、車両制御装置および車両 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020066360A (ja) * | 2018-10-25 | 2020-04-30 | パイオニア株式会社 | 表示制御装置、表示制御方法及び表示制御用プログラム |
| JP2025027083A (ja) * | 2018-10-25 | 2025-02-26 | パイオニア株式会社 | 表示制御装置、表示制御方法及び表示制御用プログラム |
| WO2020203066A1 (ja) * | 2019-04-01 | 2020-10-08 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP2020168892A (ja) * | 2019-04-01 | 2020-10-15 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| JP7059975B2 (ja) | 2019-04-01 | 2022-04-26 | 株式会社デンソー | 表示制御装置及び表示制御プログラム |
| WO2023100698A1 (ja) * | 2021-12-02 | 2023-06-08 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| JP2023082664A (ja) * | 2021-12-02 | 2023-06-14 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| JP7616193B2 (ja) | 2021-12-02 | 2025-01-17 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
| US12576891B2 (en) | 2021-12-02 | 2026-03-17 | Denso Corporation | Vehicle control device and vehicle control method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180326996A1 (en) | 2018-11-15 |
| JP6439657B2 (ja) | 2018-12-19 |
| JP2017091170A (ja) | 2017-05-25 |
| US10647331B2 (en) | 2020-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6439657B2 (ja) | 提示制御装置及び提示制御方法 | |
| JP6519435B2 (ja) | 報知管理装置及び報知管理方法 | |
| JP6447481B2 (ja) | 起動提案装置及び起動提案方法 | |
| JP2023112082A (ja) | 車両用表示装置 | |
| JP6575492B2 (ja) | 自動運転システム | |
| JP6040991B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP6665605B2 (ja) | 表示制御装置及び表示制御方法 | |
| JP2019206339A (ja) | 走行制御装置及び車載システム | |
| WO2017154396A1 (ja) | 運転交代制御装置及び運転交代制御方法 | |
| JP6856086B2 (ja) | 報知管理装置及び報知管理プログラム | |
| US20230013492A1 (en) | Presentation control device and non-transitory computer readable storage medium | |
| US20240294188A1 (en) | Vehicle control device | |
| WO2016157814A1 (ja) | 起動提案装置及び起動提案方法 | |
| JP6949288B2 (ja) | 運転支援装置、運転支援システムおよび運転支援方法 | |
| JP2018090006A (ja) | 運転支援装置 | |
| JP7310851B2 (ja) | 車両用表示装置 | |
| CN115707333A (zh) | 驾驶控制方法及驾驶控制装置 | |
| JP2020095044A (ja) | 表示制御装置及び表示制御方法 | |
| JP7363833B2 (ja) | 提示制御装置、提示制御プログラム、自動走行制御システムおよび自動走行制御プログラム | |
| JP7831526B2 (ja) | 自動運転制御装置、自動運転制御プログラム、提示制御装置及び提示制御プログラム | |
| JP7375651B2 (ja) | 通知制御装置及び通知制御プログラム | |
| JP2018069894A (ja) | 車両制御装置 | |
| US12258031B2 (en) | Presentation control device and automated driving control system | |
| JP2021043084A (ja) | 表示制御装置及び表示制御プログラム | |
| JP2023111852A (ja) | 車両用制御装置及び車両用制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16863883 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15774189 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16863883 Country of ref document: EP Kind code of ref document: A1 |