WO2017073092A1 - 回転電機 - Google Patents
回転電機 Download PDFInfo
- Publication number
- WO2017073092A1 WO2017073092A1 PCT/JP2016/055896 JP2016055896W WO2017073092A1 WO 2017073092 A1 WO2017073092 A1 WO 2017073092A1 JP 2016055896 W JP2016055896 W JP 2016055896W WO 2017073092 A1 WO2017073092 A1 WO 2017073092A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- coil
- coil portion
- electrical angle
- phase difference
- angle phase
- Prior art date
Links
Images











































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0421—Electric motor acting on or near steering gear
- B62D5/0424—Electric motor acting on or near steering gear the axes of motor and final driven element of steering gear, e.g. rack, being parallel
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/03—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with a magnetic circuit specially adapted for avoiding torque ripples or self-starting problems
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/18—Windings for salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/276—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM]
- H02K1/2766—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect
- H02K1/2773—Magnets embedded in the magnetic core, e.g. interior permanent magnets [IPM] having a flux concentration effect consisting of tangentially magnetized radial magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
- H02K1/2781—Magnets shaped to vary the mechanical air gap between the magnets and the stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Definitions
- the number of field poles of the rotor is 12n ⁇ 2n (n is a natural number), and the number of slots is 12n.
- An electric motor characterized in that the number of field poles is 18n ⁇ 2n (n is a natural number) and the number of slots is 18n is disclosed, and the motor is reduced in vibration and noise.
- the number of turns of the conducting wire of the coil section is such that the electrical angle phase difference is ⁇ 1 , ⁇ m is different from the number of turns of the conducting wire of the coil portion, and the electrical angle phase difference is the number of turns of the conducting wire of the coil portion adjacent to both sides in the circumferential direction of the stator core of the coil portion of the ⁇ k
- the torque generated by the electric motor 7 is a thrust that moves a rack shaft (not shown) in the housing 10 in the direction of arrow X through a gear box 9 in which a belt (not shown) and a ball screw (not shown) are built.
- a rack shaft (not shown) in the housing 10 in the direction of arrow X
- a gear box 9 in which a belt (not shown) and a ball screw (not shown) are built.
- the tie rod 11 moves and the tire can be steered to turn the vehicle.
- the driver is assisted by the torque of the electric motor 7 and can turn the vehicle with a small steering force.
- the rack boot 12 is provided so that foreign matter does not enter the apparatus.
- FIG. 14 is a longitudinal sectional view showing the electric motor as the reference example.
- the difference from the electric motor of the first embodiment shown in FIG. 3 is that the number of turns and the wire diameter of the conductor 21 are different, and the stator 22
- the structure, that is, the arrangement of the armature winding 38 and each coil portion which is a constituent element thereof is the same as that in FIG.
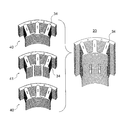
- FIG. 15 is a diagram showing a method of manufacturing the stator core 20 of the electric motor shown in FIG.
- the stator iron core 20 has tips of adjacent teeth 34 connected to each other, an inner core 57 that includes the teeth 34 and does not include the core back 33, and an outer core 56 that includes the core back 33 and does not include the teeth 34. It is manufactured by press-fitting an inner core 57 into an outer core 56.
- the teeth 34 of the inner core 57 before press-fitting are in a state where the core back 33 is not present, and the coil portion can be inserted from the radially outer side. Then, after inserting a coil part in the inner core 57 with which the insulator 39 was mounted
- the number of turns of the conductive wire 21 of each coil portion of all the teeth 34 is equal.
- broken lines that bisect the slots 35 symmetrically in the circumferential direction of the stator 22 are shown in the slots 35, and the coil portions in the slots 35 are shown with respect to the broken lines shown in the slots 35.
- the arrangement of the conductive wires 21 is symmetric about the teeth 34.
- the coil portions of the respective phases correspond to the numbers 1 to 12 of the teeth 34, -U21, + U22, + V11, -V12, -W21, + W22, + U11, -U12, They are arranged in the order of -V21, + V22, + W11, -W12. Note that “+” and “ ⁇ ” indicate the winding polarity of the coil portion, and “+” and “ ⁇ ” have opposite winding polarities.
- FIG. 17A is a vector diagram showing the electrical angle phases of the coil portions + U21, ⁇ U22, + U23 connected in series in the U-phase second armature winding portion 37 (see FIGS. 4 and 5) of the first embodiment.
- the vector length indicates the strength of the magnetomotive force generated by the coil portion wound around each tooth 34
- the vector angle indicates the electrical angle phase of the coil portion wound around each tooth 34. Is shown. Since the magnetomotive force of the coil portion is proportional to the product of the number of turns and the magnitude of the current, the length of the vector in the figure is proportional to the number of turns.
- the magnetomotive force vector generated in the coil part in the second armature winding part 37 of the U phase of FIG. 14 shown in the first reference example, in which the number of turns of all the coil parts is equal, is shown in FIG. 17B.
- the magnetomotive force generated by the U phase is represented by the length of the composite vector.
- the magnetomotive forces generated by the coil portions + U21, -U22, + U23 are equal. Therefore, compared with the case where the number of turns of the conducting wires 21 of all the coil portions is equal, in the first embodiment in which the vector whose electrical angle phase is located at the center is large, the combined vector length increases, Magnetic force can be increased. Thereby, the magnetic flux density between the magnetic space
- 18B shows a case where the sum of the numbers of turns of the conductors 21 of all the coil portions wound around each tooth 34 is equal to that of the first embodiment shown in FIG. 18A and all the coil portions have the same number of turns.
- the electric angle phases of the coil portions + U21, -U22, + U23 in the second U-phase winding portion U2 of the second armature winding portion 37 are shown in a vector diagram.
- the sum of the number of turns of the conductive wires 21 of all the coil portions wound around each tooth 34 is referred to as the total number of turns. If the length of the vector is represented by the number of turns, the magnetomotive force of the first embodiment is 17 + 2 ⁇ 14 cos 20 ° by obtaining the length of the combined vector as shown in FIG.
- FIG. 21 shows the mechanical angle phase when the coil portions of the teeth 34 of numbers 4, 8, and 18 are connected in series as a first example in which the connection methods of the U-phase coil portions are different.
- Connection diagrams of the armature winding 38 at this time are shown in FIGS.
- FIG. 22 shows the case of ⁇ connection
- FIG. 23 shows the case of Y connection.
- a series coil section group is formed in which the coil sections of -U13, + U21, and -U22 are connected in series.
- FIG. 24 shows a vector diagram of the electrical angle phase of each coil part of the U-phase series coil part group in the armature winding shown in FIGS. 22 and 23. As shown in the figure, the magnetomotive force generated is the same as that of FIG.
- the coil part + U21 is a multi-winding coil part or a small winding coil part rather than the coil parts -U22 and + U23 has been described.
- the coil part -U22 and the coil part + U23 are multi-turn coils or less than the coil part + U21.
- a wound coil may be used. Since the total number of turns can be specified more finely, the torque of the electric motor 7 can be specified more finely, and the degree of freedom in torque design can be improved.
- the in-phase coil part -U22 and the coil part + U23 are adjacent to each other.
- the resistance can be reduced, the amount of heat generated at the location where the same phase is adjacent can be reduced, and the concentration of heat generation can be suppressed.
- the insulator inserted into 57 and wound around the teeth B later.
- the coil portion on one side protrudes from the broken line at the center of the slot 35.
- the wire diameter of the coil part wound around the teeth B having the multi-winding coil part is compared with the wire diameters of other in-phase coil parts connected in series with each coil part. Big.
- the coil portion wound around the tooth 34 of the number 1 and the coil portion connected in series to the coil V11 is the coil portion + V12 wound around the tooth 34 of the number 5 and the coil wound around the tooth 34 of the number 6
- the wire diameter of the coil portion -V11 is larger than that of the coil portions + V12 and -V13.
- FIG. 29 is a front sectional view of the electric motor 7 showing a configuration in which the number of turns of the conducting wire 21 of the coil portion wound around each of the teeth 34 of numbers 1, 3, 5, 7, 9, 11, 13, 15, 17 is increased.
- FIG. 29 coil portions having different numbers of turns are arranged in all the slots 35 as compared with the first embodiment shown in FIG. The space factor has been improved.
- the arrangement of the number of turns that is, the distribution of magnetomotive force is not 180 ° rotationally symmetric. Therefore, the configuration shown in the figure is called a magnetomotive force asymmetric configuration.
- the motor 7 having 14 field poles, teeth 34, and 18 slots 35 has an electrical angle phase of a coil part constituting each series coil part group as shown in FIGS. 17A and 18A.
- the arrangement is such that three magnetomotive force vectors are arranged with a phase difference of 20 °.
- the magnetomotive force distribution is 180 ° and rotationally symmetric, so that a maximum of two sets of three phases can be formed during one rotation 360 ° of the electric motor 7. Therefore, by setting the number of parallel circuits to 1 or 2, the number of coils constituting the in-phase series coil section group can be 6 or 3.
- the electric motor 7 of this embodiment is a so-called concentrated winding in which the coil portion is intensively wound around the teeth 34, and has the effect that the coil end is small, the size is small, the copper loss is small, the heat generation is low, and the efficiency is high. It is done. Since the number of (18 ⁇ 4) y field poles (18 is a natural number) and the number of teeth 34 and slots 35 are 18y, the number of field poles is (3 ⁇ 1) y and the number of teeth 34 or slots 35. The torque can be improved as compared with the case of 3y.
- 33 is a table showing the turn ratio when the number of turns of the coil portions of teeth A and B is different.
- the combination of the number of turns was selected such that the sum of the numbers of turns of all the coil portions wound around the stator 22, that is, the total number of turns becomes equal.
- the total number of turns is 216.
- the total number of turns is 216.
- FIG. FIG. 36 is a front sectional view showing an electric motor 7 according to the third embodiment of the present invention.
- the electric motor 7 of this embodiment in addition to increasing the circumferential width of the tooth B having the multi-winding coil portion so that W B > W A , the tooth B is wound around the tooth B as compared with that of FIG.
- the circumferential width W S2 ′ of the slot 35 in which the coil portion is accommodated is increased, and the width W S1 ′ of the other slots 35 is decreased.
- the other configuration is the same as that of the electric motor 7 of the first embodiment shown in FIG.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Windings For Motors And Generators (AREA)
Abstract
Description
その結果、導線のターン数が大きいコイル部、すなわち多巻コイル部と隣接するコイル部が同相となり、局所的に発熱が集中する。
例えば、車両用の電動パワーステアリング装置に用いられる電動機においては、一般的にバッテリー電圧が12V程度と小さく、出力を高めるために電流を増加させる必要があるため、ターン数が少なく、径が大きい導線を用いてコイル部を形成する。
このとき、電動パワーステアリングのハンドル操作時にハンドル位置が一定位置に保持され、3相の電流が変動せず固定された場合などに、同相のコイル部が隣接する同相のコイル部との間で局所的な発熱が増大するという課題があった。
この固定子の内側に磁気的空隙部を介して設けられ回転軸を中心に回転する回転子と、を備え、
前記電機子巻線では、前記コイル部のうち同相のコイル部の数がn個(n≧3)であって、m個(m≦n)の直列接続された同相の前記コイル部からなる直列コイル部群の内、二つの前記コイル部間の電気角位相差が最も大きいものをθmとおき、電気角位相差が最も大きい前記コイル部の内の一方の電気角位相差をθ1=0°とし、電気角位相差が前記θ1の前記コイル部に対する残りの前記コイル部の電気角各位相差をそれぞれ小さいものから順に、θ2,θ3・・・・θmとした場合において、
θ1<θk<θm(k=2,3,・・・,m-1)を満たすθkの電気角位相差を有する前記コイル部の導線のターン数は、電気角位相差がθ1,θmの前記コイル部の導線のターン数と異なり、かつ電気角位相差が前記θkの前記コイル部の前記固定子鉄心の周方向の両側に隣接する前記コイル部の導線のターン数とも異なり、さらに、電気角位相差が前記θkの前記コイル部の相は、電気角位相差が前記θkの前記コイル部の前記周方向の両側に隣接するそれぞれの前記コイル部の相と異なる、
または、
θ1<θk<θm(k=2,3,・・・,m-1)を満たすθkの電気角位相差を有する前記コイル部の導線の線径は、電気角位相差がθ1,θmの前記コイル部の導線の線径と異なり、かつ電気角位相差が前記θkの前記コイル部の前記固定子鉄心の周方向の両側に隣接する前記コイル部の導線の線径とも異なり、さらに、電気角位相差が前記θkの前記コイル部の相は、電気角位相差が前記θkの前記コイル部の前記周方向の両側に隣接するそれぞれの前記コイル部の相と異なる。
図1は、この発明の実施の形態1の電動機7が搭載された自動車の電動パワーステアリング装置1を示す構成図、図2は、図1の電動駆動装置13を示す断面図である。
この電動パワーステアリング装置は、回転電機である電動機7と、この電動機7と一体のECU(Electric Control Unit)6とからなる電動駆動装置13を備えている。
なお、上記電動駆動装置13では、電動機7とECU6が電動機7の軸線方向に一体になって配置されているが、この限りではなく、ECU6が電動機7の径方向に配置されていてもよく、また電動機7とECU6とが別体となっていてもよい。
一方、車速などの自動車の情報が電気信号に変換されて第2のコネクタ5を通じてECU6に伝達される。ECU6は、上記トルクと車速などの自動車の情報から、必要なアシストトルクを演算し、インバータを通じてハウジング10と平行に配置された電動機7に電流を供給する。
また、ECU6への電源供給は、バッテリーやオルタネータから電源コネクタ8を介して送られる。
電動機7で発生したトルクは、ベルト(図示せず)とボールネジ(図示せず)が内蔵されたギヤボックス9を介してハウジング10内のラック軸(図示せず)を矢印Xの方向に動かす推力を発生させ、運転者の操舵力をアシストする。
これにより、タイロッド11が動き、タイヤが転舵して車両を旋回させることができる。
この結果、運転者は、電動機7のトルクによってアシストされ、少ない操舵力で車両を旋回させることができる。
なお、ラックブーツ12は、異物が装置内に侵入しないように設けられている。
固定子22の固定子鉄心20は、円環状のコアバック33と、コアバック33から磁気的空隙長の方向である内径方向に延びた計18個のティース34と、を有し、隣接したティース34間にはスロット35が形成されている。
固定子22の電機子巻線38は、18個のティース34にインシュレータ39を介してそれぞれ導線21が集中巻で巻回されてスロット35に収容された複数のコイル部から構成されている。
V相に含まれるコイル部は、-V11、+V12、-V13、+V21、-V22、+V23の6個、W相に含まれるコイル部は、-W11、+W12、-W13、+W21、-W22、+W23の6個、U相に含まれるコイル部は、-U11、+U12、-U13、+U21、-U22、+U23の6個あり、外部でそれぞれ接続される。
また、図3に示すように、各コイル部は、ティース34の番号1~18のそれぞれに対応して、-V11、-W22、+W23、+U21、+V12、-V13、-W11、-U22、+U23、+V21、+W12、-W13、-U11、-V22、+V23、+W21、+U12、-U13の順に並んで配置されている。なお、「+」、「-」はコイル部の巻極性を示しており、「+」と「-」は巻極性が逆となる。
第1の電機子巻線部36は、-U11、+U12及び-U13の各コイルが直列に接続されており、-V11、+V12及び-V13の各コイル部が直列に接続されており、-W11、+W12及び-W13が直列に接続されており、これらの各第1の同相巻線部の接続部A1、B1、C1を接続してΔ結線を構成されている。
第2の電機子巻線部37は、+U21、-U22及び+U23の各コイル部が直列に接続されており、+V21、-V22及び+V23の各コイル部が直列に接続されており、+W21、-W22及び+W23が直列に接続されており、これらの各第2の同相巻線部の接続部A2、B2、C2を接続してΔ結線を構成されている。
なお、各相の並列数が2の回路を構成する電機子巻線38は、図5に示すように、第1の電機子巻線部36及び第2の電機子巻線部37をY結線で構成してもよい。
なお、今後、同相のコイル部が複数直列に接続されたものを直列コイル部群と呼ぶことにする。
また、電機子巻線38、図7に示すように、同相の各コイル部を全て直列に接続した各相の直列コイル部群の両端部の接続部であるA、B、Cを接続して1組の3相のY結線構成としてもよい。
同図において、ティース34の番号2、3、5、6、8、9、11、12、14、15、17、18を纏めてティースAと呼び、ティース34の番号1、4、7、10、13、16を纏めてティースBと呼ぶこととすると、ティースBに巻装されたコイル部の導線21のターン数及び線径は、ティースAに巻装されたコイル部の導線21のターン数及び線径より、多くまた大きい。
なお、同図では、ティースBに巻装されたコイル部の断面にはハッチングを加えて示している。
図8は、この実施の形態1の電動機7の変形例を示す縦断面図であり、この電動機7では、14個の永久磁石32の径方向長さが周方向長さに比べて長い形状となるように回転子鉄心30に14個埋め込まれ、隣り合う永久磁石32の向かい合う面が互いに同じ極になるように着磁されている。
なお、この例の場合、永久磁石32の外側に、永久磁石32の保護と飛散防止用にステンレスやアルミニウムなどの非磁性材料を円筒状にしたカバーで覆う場合がある。
なお、連結コアブロック40は、隣接した各ティース34の回転子29側の先端部の両端面が当接したものを含む。
電動機7では、詳細は省略し、電機子巻線のみ示している。
ECU6も簡単のため詳細は省略し、インバータ42のパワー回路部のみを示す。
ECU6は1台のインバータ42の回路から構成されていて、このインバータ42から電機子巻線38に3相の電流を供給する。
電機子巻線38では、図5に示す、Y結線の第1の電機子巻線部36の接続部A1、B1、C1と、Y結線の第2の電機子巻線部37の接続部A2、B2、C2において、接続部A1とA2、接続部B1とB2、接続部C1とC2とをそれぞれ接続部A、B、Cで接続され、各相が2並列である回路が構成されている。
なお、インバータ42を接続される電機子巻線38に関しては、図4に示すΔ結線された、第1の電機子巻線部36及び第2の電機子巻線部37を用いてもよい。
また、図6及び図7に示す、同相のコイル部がそれぞれ直列に接続された電機子巻線38でもよい。
なお、図13では電源43がECU6の内部にあるかのように描かれているが、実際はバッテリー等の外部の電源からコネクタを介して、電力が供給される。
電源リレー45は、1個設けられていて、2個のMOS-FETで構成され故障時などは電源リレー45を開放して、過大な電流が流れないように動作する。
また、同図では、電源43、コイル44、電源リレー45の順に接続されているが、電源リレー45は、コイル44よりも電源43に近い位置に設けられてもよいことは言うまでもない。
なお、コンデンサ46は平滑コンデンサである。
また、同図では1個のコンデンサ46で構成されているが、複数のコンデンサを並列に接続して構成してもよいことは言うまでもない。
電動機7とECU6の電気的接続箇所は、3相分で計3箇所であるが、電動機7の内部で、第1の電機子巻線部36と第2の電機子巻線部37とに別れるように接続されている。
図14は、この参考例である電動機を示す縦断面図であり、図3に示す実施の形態1の電動機との違いは、導線21のターン数及び線径が異なるだけで、固定子22の構造、即ち電機子巻線38、その構成要素である各コイル部の配置は図3のものと同じである。
この固定子鉄心20は、隣接したティース34の先端部同士が連結されており、ティース34を含みコアバック33を含まない内コア57と、コアバック33を含みティース34を含まない外コア56とから構成され、外コア56に内コア57を圧入して製造される。
圧入前の内コア57のティース34は、コアバック33がない状態であり、径外側方向からコイル部を挿入することができる。そこで、コイル部をインシュレータ39が装着された内コア57に挿入した後、外コア56を圧入することで、固定子22が製造される。
この第1の参考例の場合、全ティース34の各コイル部の導線21のターン数が等しい。
図14には、各スロット35の内部に、スロット35を固定子22の周方向に対称的に二等分する破線を示しており、スロット35内に示す破線に対しスロット35内のコイル部の導線21の配置がティース34を中心に対称となる。
この電動機は、回転子29の界磁極が10個、固定子22のスロット35の数及びティース34の数が12個であり、固定子22の内側に回転自在の回転子29が設けられている。
回転子29は、回転軸となるシャフト27とシャフト27外側に回転子鉄心30が設けられ、さらに回転子鉄心30の内部に永久磁石32が周方向に等間隔に10個埋め込まれている。
固定子22は、コアバック33、等間隔に配置されコアバック33から磁気的空隙長の方向に突出した12個のティース34及びティース34間に設けられた12個のスロット35が形成された磁性体からなる固定子鉄心20と、この固定子鉄心20の12個のティース34にそれぞれ集中巻で巻装され、スロット35に収容された複数のコイル部を有する。
コイル部を巻装するティース34の番号を、反時計回りに1、2、3、・・・、12とし、それぞれのティース34に巻装されたコイル部は、U相、V相、W相の電源と接続されており、V相に含まれるものは+V11、-V12、-V21、+V22の4個、W相に含まれるものは+W11、-W12、-W21、+W22の4個、U相に含まれるものは+U11、-U12、-U21、+U22の4個、を有し、外部でそれぞれ接続されて構成される。
また、図16に示すように、各相のコイル部は、ティース34の番号1~12のそれぞれに対応して、-U21、+U22、+V11、-V12、-W21、+W22、+U11、-U12、-V21、+V22、+W11、-W12の順に並んでいる。
なお、「+」、「-」はコイル部の巻極性を示しており、「+」と「-」は巻極性が逆となる。
同図では、多巻コイル部に隣接するコイル部が同相となる個所が6つある。
これにより、各相のコイル部が収められたスロット35が6つ存在する。ティース34の番号2、4、6、8、10、12に巻装された多巻コイル部が収納されたスロット35の占積率が向上するため、全ティース34のコイル部の導線21のターン数が等しい場合と比較し、発熱量を低減することができる。
しかし、すべてのコイル部に対しそれぞれ同相のコイル部が隣接して配置されているため、電流による発熱が隣接した同相のコイル部間に集中し、局所的な発熱が増大する。
このことは、電動パワーステアリングのハンドルが固定され、電流が変動せず固定された場合において、単一の相のコイル部が配置されたスロット35における局所的な発熱量が増大するため、永久磁石32の磁気特性の低下によるトルクの低下や、基板19への加熱による性能の低下などを招くという課題があった。
ここで電気角位相とは、電動機7の回転子29上で隣り合う1つのN極と1つのS極がなす角度を180°に変換したときの角度である。また、コイル部の巻極性が異なる場合、電気角位相は180°反転する。
これらを踏まえると、例えば、図3に示す界磁極が14、固定子22のスロット35の数が18の電動機7において、隣接するN極とS極がなす角度は360°/14=25.71°なのでこの角度を180°に変換する。
この電動機7において、隣接する2本のティース34がなす角度は360°/18=20°なので、この角度を電気角位相に変換すると20°×180/25.71=140°となる。
なお、電気角位相に対し、回転子29が1周回転するときの角度を360°とする場合の角度を機械角または機械角位相、あるいは単に角度と呼ぶこととする。
よって、最も電気角位相差が大きいのは-U22と+U23の電気角位相差40°である。ここで、+U23を基準として電気角位相をθ1=0°とおくと、コイル部+U21の電気角位相は20°でありθ2=20°となり、コイル部-U22の電気角位相は40°でありθ3=40°となる。このベクトル図を示したものが図17Aであり、θ1<θ2<θ3であることがわかる。
この実施の形態の例では、+U21のコイル部、即ち電気角位相がθ2であるコイル部の導線21のターン数が、直列接続された他の同相のコイル部より大きい多巻コイルであり、発生する起磁力が-U22、+U23より強いため、ベクトル長さが他に比べて大きく示されている。
この比較例では、コイル部+U21、-U22、+U23の発生する起磁力は等しい。
従って、すべてのコイル部の導線21のターン数が等しい場合と比較して、電気角位相が中央に位置するベクトルが大きくなるこの実施の形態1のものでは、合成ベクトル長さが増加し、起磁力を増加させることができる。
これにより、電動機7の固定子22と回転子29の磁気的空隙部間における磁束密度を増加させ、トルクを向上することができる。
各ティース34に巻装された全てのコイル部の導線21のターン数の和を総ターン数と呼ぶこととする。ベクトルの長さをターン数で表すとすると、実施の形態1のものの起磁力は、図19Aに示すように、合成ベクトルの長さを求めることにより17+2×14cos20°となる。
一方、総ターン数が実施の形態1のものと等しく、かつ全てのコイル部の導線21のターン数が等しい場合の起磁力は、図19Bに示すように、15+2×15cos20°となる。起磁力の差は2(1-cos20°)≒0.1206であり、実施の形態1のものの方が大きくなる。
つまり、総ターン数を一定とした場合に、第1の参考例と同様に、全てのコイル部の導線21のターン数を等しくした構成と比較して、実施の形態1のものは、起磁力を増大させ、トルクを向上する効果がある。
また、目標値とするトルクを出力する電動機を設計する場合に、コイル部+U21の導線21のターン数を調整し多巻コイルとする、もしくは他のコイル部よりターン数が少ない少巻コイルとすることにより、起磁力を示す合成ベクトルの長さをより細かい値の幅で調整できる。
電動機のトルクは、起磁力に比例するため、トルクをより細かい値の幅で指定することができ、電動機のトルク設計の自由度を向上する効果がある。
この例では、同相のコイル部の数が6個であり、直列接続されたコイル部の数が3個または6個の場合に、直列コイル部群の電気角位相をθ1<θ2<θ3とおけて、電気角位相がθ2であるコイル部のターン数を異ならせることによる効果を得ることができる。
同図では、コイル部+U21、-U22、+U23が直列接続された場合を示している。コイル部+U21が巻装されたティース34の機械角位相を基準としφ1=0°とする。番号4のティース34から反時計回りに見た機械角位相が最も大きいのは、番号9のコイル部+U23が巻装されたティース34であり、番号4のティース34からφ3=100°の位置にある。コイル部-U22が巻装された番号8のティース34は、番号4と番号9のティース34との間に配置されており、番号4のティース34からφ2=80°の位置にある。
このとき、コイル部+U21が巻装された番号4のティース34は、異相であるコイル部+W23、コイル部+V12が巻装されたティース34に隣接している。
コイル部+U21は、コイル部-U22、+U23、+W23、+V12よりも多巻コイルであるため、コイル部を構成する導線21が他のコイル部より長く、抵抗が増大し局所的な発熱が集中し易い。
しかしながら、このコイル部+U21では、固定子22の周方向の両側で隣接するコイル部がV相、W相であることにより、同相の電流が集中することによる局所的な発熱が抑制され、発熱を分散させることができる。
さらに、このように同相のコイル部が固定子22上で分散して配置されることにより、回転子29に偏芯があった場合に、固定子22と回転子29間の磁気的空隙部に発生する磁界の強さが3つの各相の巻線部コイル部で不均一となることを抑制する効果がある。
このときの電機子巻線38の結線図を図22及び図23に示す。
図22はΔ結線の場合を示しており、図23はY結線の場合を示している。
U相では-U13、+U21、-U22の各コイル部が直列に接続された直列コイル部群を構成している。
図24は、図22及び図23に示した電機子巻線におけるU相の直列コイル部群の各コイル部の電気角位相のベクトル図を示す。
同図に示すように、接続される各コイル部のティース34の番号が図20と異なる以外は、図17A、図18Aと同様であるため、発生する起磁力は、図20のものと同様である。
このとき、コイル部-U13が巻装された番号18のティース34の機械角位相を基準としφ1=0°とする。番号18のティース34から反時計回りに見た機械角位相が最も大きいのは、コイル部-U22が巻装された番号8のティース34であり、φ3=160°とする。基準である番号18のティース34から番号8のティース34を視たたとき、番号4のティース34は、番号18と番号8のティース34との間に配置されており、番号4のティース34の機械角はφ2=80°である。
この場合についても、多巻コイル部+U21が巻装された番号4のティース34は、異相であるコイル部+W23、コイル部+V12が巻装されたティース34に隣接しており、図20のものと同様の効果が得られる。
このときの電機子巻線38の結線図を図26及び図27に示す。
図26はΔ結線の場合を示しており、図27はY結線の場合を示している。
U相では+U12、+U21、+U23の各コイル部が直列に接続された直列コイル部群を構成している。
図28に、図26及び図27で示した結線方法における第1の電機子巻線部36のU相を構成するコイル部の電気角位相のベクトル図を示す。
同図に示すように、接続される各コイル部のティース34の番号が図20と異なる以外は、図17A、図18Aと同様であるため、発生する起磁力は、図20のもの
と同様である。
この場合についても、多巻コイル部+U21が巻装された番号4のティース34は、異相であるコイル部+W23、コイル部+V12が巻装されたティース34に隣接しており、図20のものと同様の効果が得られる。
総ターン数をさらに細かく指定することができるため、電動機7のトルクをさらに細かく指定可能とし、トルクの設計の自由度を向上できる。
なお、ターン数が1つの固定子22の構造内で異なるこの実施の形態の例では、第1の参考例で述べた製造方法を採用する場合、ティースAに巻装するボビンを先に内コア57に挿入し、ティースBに巻装するインシュレータを後から挿入することで製造可能である。
この場合、図3に示すように、スロット35の中心の破線から片側のコイル部がはみ出す構造となる。
以上より、多巻コイル部を有するティースBを採用することでスロット35の隙間を低減する上記構造は、製造可能であり、発熱量の低減を図ることができる。
例えば、番号1のティース34に巻装されたコイル部-V11に直列接続されたコイル部は、番号5のティース34に巻装されたコイル部+V12、番号6のティース34に巻装されたコイル部-V13であるが、コイル部-V11の線径は、コイル部+V12、-V13と比較して大きい。
このように、線径を異ならせることにより、スロット35の隙間をより少なくし、スロット35のコイル部に対する占積率を向上しコイル部の抵抗を低減し、発熱量を低減することが可能となる。
また、固定子22における導線21の各ターン数の配置も、固定子22をその中心に対し180°回転させてもその配置が同じとなっている。
即ち、番号1~9のティース34を含む固定子22の上半分の各相のコイル部及びターン数の配置を、固定子22中心に対し180°回転させると、番号10~18のティース34を含む固定子22の下半分における各相のコイル部及びターン数の配置と等しくなっている。
このとき、固定子22の各コイル部が発生する起磁力は、それぞれのターン数と電流の積で表されるため、固定子22における起磁力の分布が、同じく180°固定子22を中心に対し回転させてもその分布が同じとなる。
このことを、起磁力が180°で回転対称である、即ち2回回転対称であると言うこととする。
この実施の形態の例は180°回転対称であるが、一般化しPを整数として固定子22を中心に対しP°回転させたとき、相とターン数の配置が回転前と同じとなる場合はP°で回転対称である、即ち360/P回回転対称であるとする。
固定子22の径方向に生じる電磁加振力は、電動機の騒音・振動の要因であり、特に空間1次の電磁加振力は電動機のベアリングのたたき音を生じ、大きな騒音源となるため低減することが望ましい。
そこで前述のように、固定子22の各コイル部が発生する起磁力が180°で回転対称であることにより、大きな騒音源である空間1次の電磁加振力の発生を抑制することが可能となる。
図29に示す構成は、図3に示す実施の形態1のものと比較し、全てのスロット35にターン数が異なるコイル部が配置されており、スロット35の隙間がより少なくなり、スロット35の占積率がより向上している。
しかし、図29に示す構成では、ターン数の配置、即ち起磁力の分布が180°回転対称でない。よって同図の構成を、起磁力非対称の構成と呼ぶことにする。
ここで、起磁力非対称の構成における空間1次の電磁加振力を1としたときの、第1の参考例と実施の形態1の電動機7における空間1次の電磁加振力の値を比較した結果を図30に示す。
同図より、起磁力非対称の構成では空間1次の電磁加振力が発生しているのに対し、実施の形態1では第1の参考例とほぼ同等に抑えられている。
従って、ターン数を異ならせるコイル部の配置を、固定子22に対し180°回転対称にすることで、前述のターン数を異ならせる効果を有しながら、騒音源である空間1次の電磁加振力の増大を抑えることが可能である。
この実施の形態の例では、180°=360°/2で回転対称、即ち2回回転対称であり、起磁力に含まれる空間次数成分が2次以上であるため、空間1次の電磁加振力が発生しないが、このことを一般化してLを2以上の自然数としターン数の分布が360°/Lで回転対称、即ちL回回転対称である場合は、起磁力に含まれる空間次数成分がL次以上であるため、空間1次の電磁加振力が発生しないことはいうまでもない。
なお、L回回転対称の配置が、製造誤差の範囲(機械角で±10・程度)でずれた場合でも、図30の電磁加振力は、図29のものの例まで増加しないため問題ない。
前記のように、この実施の形態の例は起磁力の分布が180°で回転対称であるため、電動機7の1周360°の間に最大2組の3相を構成することができる。
よって、回路の並列数を1または2とすることにより、同相直列コイル部群を構成するコイルの数を6個または3個とすることができる。
よって、この20°の電気角位相差で並ぶ3本の起磁力ベクトルに対応するコイルを1組とし、同相とすることにより、図17A、図18Aに示すように各同相の直列コイル部群における総ターン数を等しくすることができる。
よって、回路の並列数をLとすることにより、各同相直列コイル部群における総ターン数を等しくする構成が可能である。
このとき、各同相直列コイル部群の各直列コイル部群に発生する誘起電圧が等しくなるため、各相の並列回路において循環電流が発生しないという効果がある。
また、界磁極を(18±4)y個(yは自然数)、ティース34、スロット35の数を18y個としたので、界磁極を(3±1)y個、ティース34またはスロット35の数を3y個とした場合よりもトルクを向上できる。
また、界磁極を(12±2)y個、ティース34またはスロット35数を12y個とした場合よりも空間次数が2次の固定子鉄心20に生じる電磁加振力が小さくでき、振動、騒音を低減できるという効果が得られる。
また、高調波、特にトルクリプルの主成分である6f成分や12f成分の巻線係数が小さいので、トルクリプルが低減できる。
界磁極は、22個、ティース34の数は18個となっている。周方向のコイル部の配置は図3と同様であるため、前記と同等の効果が得られるのはいうまでもない。
よって、この変形例の構造により、熱が伝達する経路をつくり、電動機7の温度上昇を低減することができる。
コイル部+U21は、他の2つの同相直列コイル部-U22、+U23の中間の電気角位相に位置している。
同様に、コイル部-V11、-W11、+V21、-U11、+W21も各直列コイル部群の中で、他のコイル部の中間の電気角位相に位置している。
即ち、電機子巻線38が第1の電機子巻線部36と第2の電機子巻線部37とが並列回路で構成される場合において、並列回路を構成する直列コイル部群のなかのコイル部の線径は、別の直列コイル部群で同じ電気角位相を有するコイル部の線径と等しい。
これにより、各直列コイル部群の抵抗値が等しくなるため、各直列コイル部群に等しい電圧が印加された際に、電流が各直列コイル部群でアンバランスにならないという効果がある。
電動機7の回路の各相や、各相を構成する並列回路で電流がアンバランスとなる場合、起磁力分布が乱れるためトルクリプルが増大するという問題があるが、この実施の形態の例ではこの問題が生じない。
このとき、ティースAに巻装されたコイル部のターン数とティースBに巻装されたコイル部のターン数の比をターン数比率と定義し、(ターン数比率)=(ティースBに巻装されたコイル部のターン数(β))/(ティースAに巻装されたコイル部のターン数(α))で求める。
例えば、この実施の形態の図3に示すように、ティースAの巻装されたコイル部のターン数(α)は14、ティースBに巻装されたコイル部のターン数(β)は17であるので、ターン数比率は(β/α)=17/14=1.214である。
図33に、ティースAとティースBのコイル部のターン数を異ならせた場合のターン数比率を表で示している。
ターン数の組合せは、固定子22に巻装されたすべてのコイル部のターン数の和、すなわち総ターン数が等しくなるものを選択した。
例えば、同図でα=12、β=12のときの総ターン数は、12×6+12×12=216であるのに対し、同図でα=11、β=14のときの総ターン数は11×12+14×6=216であり、等しい値としている。その他の組合せについても、総ターン数は216となる。
図14に示す第1の参考例のように、全コイル部のターン数が等しい電動機7の発生トルクは、コイル部に印加する電流値と総ターン数の積におおむね比例する。よって、総ターン数を揃え、かつ印加する電流を等しくすることで、電動機7の発生トルクがほぼ同等となるようなターン数の組合せを選択した。
図33で示したターン数の組合せで解析計算を実行し、計算結果をターン数比率に対する平均トルクとトルクリプルの関係として示したものを図34に示した。
平均トルク及びトルクリプルは、ともにα=12、β=12の場合の値を1としたときの比率を示したものである。
同図より、平均トルクはターン数比率1.60で最大となり、トルクリプルはターン数比率1.27で最小となっている。ターン数比率が1.0より大きく2.0以下であれば、第1の参考例に対応するターン数比率1の場合と比較し、平均トルクを向上し、かつトルクリプルを同等以下とする効果が得られる。
図35は、この発明の実施の形態2の電動機7を示す正断面図である。
この実施の形態の電動機7では、多巻コイル部が巻装されたティースBの周方向の幅WBが、ティースAの周方向の幅WAに比較し大きくなっている。
他の構成は、図3に示した実施の形態1の電動機7と同じである。
また、ティースBに少巻コイル部を巻装した場合には、逆に幅WBを幅WAより小さくすることにより、ティースBに巻装されたコイル部が収納されたスロット35の幅を大きくし、ティースBに巻装されたコイルの線径を大きくすることにより抵抗を低減し、発熱量の低減を図ることができる。
図36は、この発明の実施の形態3の電動機7を示す正断面図である。
この実施の形態の電動機7では、多巻コイル部を有するティースBの周方向の幅を大きくしWB>WAとすることに加え、図35のものと比較してティースBに巻装されたコイル部が収納されたスロット35の周方向幅WS2'を大きくし、その他のスロット35の幅WS1'を小さくしている。
他の構成は、図3に示した実施の形態1の電動機7と同じである。
これにより、ティース34の周方向の幅のみ変更した場合である図35のものと比較して、多巻コイル部の-V11、+U21、-W11、+V21、-U11、+W21が収納されたスロット35の隙間が増え、より多くの導線21のターン数をティース34に巻回できるようになり、ターン数を選択する自由度が向上する。
さらに、多巻コイル部が収納されていないその他のスロット35の隙間が小さくなり、占積率が向上するという効果がある。
この変形例では、図36に示すティース34の幅の変更とスロット35の幅の変更に加え、多巻コイル部が巻装されたティースBに、導線21のターン数を1ターン増加させた例を示している。同図では、スロット35の内部において増加させた1ターンの導線21の断面をハッチングしている。
このように、スロット35の周方向幅を異ならせることで、スロット35の面積を有効に利用し、ターン数の選択の自由度を高め、トルク性能の向上を図ることができる。
図38は、実施の形態4の電動機7を示す正断面図である。
この実施の形態では、ティースBに巻装されたコイル部の導線21の線径が、ティースAの導線21の線径と等しい。
他の構成は、図3に示した実施の形態1の電動機7と同じである。
この実施の形態では、各ティース34に巻装するコイル部を1種類の線径の導線21で構成できるため、製造性を高めながらも実施の形態1と同様の効果が得られる。
図39は、実施の形態5の電動機7を示す正断面図である。
この実施の形態では、ティースBに巻装されたコイル部の導線21のターン数が、ティースAのコイル部の導線21のターン数と等しく、かつティースBに巻装されたコイル部の導線21の線径が、ティースAの導線21の線径と異なる。
同図において、導線21の線径が異なるコイル部が巻装されたティース34のコイル部の断面をハッチングしている。
他の構成は、図3に示した実施の形態1の電動機7と同じである。
図40は、実施の形態6の電動機7を示す正断面図である。
この実施の形態では、コイル部の構成要素である導線に断面が矩形上の平角線を用いている。
同図において、ティースBに巻装されたコイル部の導線21aのターン数は、ティースAに巻装されたコイル部の導線21aのターン数より大きい。同図では、多巻コイル部の断面にハッチングしている。
他の構成は、図3に示した実施の形態1の電動機7と同じである。
同図に示すように、丸線と同様にターン数を異なる構成とすることができるため、今までに述べた効果に加え、スロット35の占積率の更なる向上を図ることが可能である。
また、図41はこの実施の形態6の変形例であり、ティースBに巻装されたコイル部の導線21aのターン数及び断面積が、その他のコイル部より大きい。
この変形例では、断面積が異なることは、丸線では線径が異なることに対応する。
よって、実施の形態1の電動機7において線径を異ならせることと同様に、平角線の断面積を異ならせることにより、スロット35の占積率をさらに向上することが可能である。
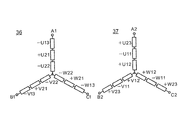
図42は、この実施の形態7における電動機7及びECU6の回路図である。
この実施の形態では、電動機7を駆動するインバータ42を2台とし、図3の電機子巻線38の第1の電機子巻線部36の接続部A1、B1、C1に、第1のインバータ42Aが接続され、第2の電機子巻線部37の接続部A2、B2、C2に、第2のインバータ42Bが接続される。
図42では、簡単のため電動機7では電機子巻線のみを示している。
この電動機巻線は、第1のU相巻線部U1、第1のV相巻線部V1、第1のW相巻線部W1によって構成される第1の電機子巻線部36と、第2のU相巻線部U2、第2のV相巻線部V2、第2のW相巻線部W2によって構成される第2の電機子巻線部37とから構成されている。
ECU6も簡単のため詳細は省略し、第1のインバータ42A、第2のインバータ42Bのパワー回路部のみを示す。
ECU6は、2台のインバータ42A,42Bの回路から構成されていて、それぞれのインバータ42A,42Bから第1および第2の電機子巻線部36,37に3相の電流を供給する。 ECU6にはバッテリー等の電源43から直流電源が供給されており、ノイズ除去用のコイル44を介して、電源リレー45Aが接続されている。
なお、図42では電源43がECU6の内部にあるかのように描かれているが、実際はバッテリー等の外部の電源からコネクタを介して、電力が供給される。
電源リレー45A,45Bは、2個あり、それぞれ2個のMOS-FETで構成され故障時などは電源リレー45A,45Bを開放して、過大な電流が流れないようにする。
なお、図では、電源リレー45A,45Bは、電源43、コイル44の後に接続されているが、コイル44よりも電源43に近い位置に設けられてもよいことは言うまでもない。第1のコンデンサ46A、第2のコンデンサ46Bは、平滑コンデンサである。
図ではそれぞれ、1個のコンデンサで構成されているが、複数のコンデンサを並列に接続されて構成してもよいことは言うまでもない。
さらに、下側の3つの第2のMOS-FET48A、第4のMOS-FET50A、第6のMOS-FET52AのGND(グランド)側にはそれぞれシャント抵抗が1つずつ接続されており、シャント53A,54A,55Aとしている。これらシャント抵抗は電流値の検出に用いられる。
なお、シャント53A,54A,55Aは3個の例を示したが、2個のシャントであってもよいし、1個のシャントであっても電流検出は可能であるため、そのような構成であってもよいことは言うまでもない。
さらに、下側の3つの第2のMOS-FET47B、第4のMOS-FET50B、第6のMOS-FET52BのGND(グランド)側にはそれぞれシャント抵抗が1つずつ接続されており、シャント53B,54B,55Bとしている。これらシャント抵抗は電流値の検出に用いられる。
なお、シャント53B,54B,55Bは3個の例を示したが、2個のシャントであってもよいし、1個のシャントであっても電流検出は可能であるため、そのような構成であってもよいことは言うまでもない。
2台のインバータ42A,42Bは、回転角度センサである磁気センサ14によって検出した回転角度に応じた制御回路(図示せず)から上記各MOS-FETに信号を送ることでスイッチングし、第1の電機子巻線部36及び第2の電機子巻線部37に所望の3相電流を供給する。
なお、磁気センサ14の代りに、レゾルバやGMRセンサ等を用いてシャフト27の回転角度を検出してもよい。
電動パワーステアリング装置1ではトルクリプルは振動・騒音の原因となるほか、運転者がトルクリプルを感じて操舵感覚が悪化することがある。
しかしながら、この実施の形態の構成により、トルクリプルを大幅に低減できるため振動騒音が小さく、良好な操舵感覚を得ることができるという効果がある。
さらに、それぞれ3相で構成される第1の電機子巻線部36、第2の電機子巻線部37は異なるインバータ42A,42Bに接続されているため、インバータ42A,42Bの片方の故障や、片方の結線の断線等が生じた場合も、もう片方の3相の入力が継続されるため、電動機7を駆動し続ける冗長性が得られるという効果がある。
また、インバータ42A,42Bを2台とすることにより、インバータ42A,42Bが供給する電流をインバータ42が1台の場合の半分に低減できるため、回路における損失を低減し、発熱量を低減する効果がある。
なお、この実施の形態の効果は、上記各実施の形態の電動機の構成と両立することが可能であるため、上記各実施の形態に述べた効果に加え、発熱量の低減効果、トルクリプルの低減効果、冗長性を持たせる効果を追加することができる。
また、電動パワーステアリング装置に搭載される電動機は一例であり、工作用、運搬用等に利用される電動機であってもよい。
また、発電機にもこの発明は適用できる。
Claims (12)
- 円環状のコアバックから周方向に間隔を空けて径内側方向に延びた複数のティースにより複数のスロットが形成された固定子鉄心、この固定子鉄心の前記ティースに巻装された複数のコイル部を有する電機子巻線を含む固定子と、
この固定子の内側に磁気的空隙部を介して設けられ回転軸を中心に回転する回転子と、を備え、
前記電機子巻線では、前記コイル部のうち同相のコイル部の数がn個(n≧3)であって、m個(m≦n)の直列接続された同相の前記コイル部からなる直列コイル部群の内、二つの前記コイル部間の電気角位相差が最も大きいものをθmとおき、電気角位相差が最も大きい前記コイル部の内の一方の電気角位相差をθ1=0°とし、電気角位相差が前記θ1の前記コイル部に対する残りの前記コイル部の電気角各位相差をそれぞれ小さいものから順に、θ2,θ3,・・・,θmとした場合において、
θ1<θk<θm(k=2,3,・・・,m-1)を満たすθkの電気角位相差を有する前記コイル部の導線のターン数は、電気角位相差がθ1,θmの前記コイル部の導線のターン数と異なり、かつ電気角位相差が前記θkの前記コイル部の前記固定子鉄心の周方向の両側に隣接する前記コイル部の導線のターン数とも異なり、さらに、電気角位相差が前記θkの前記コイル部の相は、電気角位相差が前記θkの前記コイル部の前記周方向の両側に隣接するそれぞれの前記コイル部の相と異なる、
または、
θ1<θk<θm(k=2,3,・・・,m-1)を満たすθkの電気角位相差を有する前記コイル部の導線の線径は、電気角位相差がθ1,θmの前記コイル部の導線の線径と異なり、かつ電気角位相差が前記θkの前記コイル部の前記固定子鉄心の周方向の両側に隣接する前記コイル部の導線の線径とも異なり、さらに、電気角位相差が前記θkの前記コイル部の相は、電気角位相差が前記θkの前記コイル部の前記周方向の両側に隣接するそれぞれの前記コイル部の相と異なる回転電機。 - 電気角位相差が前記θkの前記コイル部の線径は、同じ前記直列コイル部群の他の前記コイル部と異なる請求項1に記載の回転電機。
- Lを2以上の整数としたとき、各前記コイル部の相とターン数の配置が、前記回転軸の中心に機械角でL回回転対称である請求項1又は請求項2記載の回転電機。
- 前記直列コイル部群は、並列回路を構成し、前記並列回路の並列数が前記Lである請求項3に記載の回転電機。
- 電気角位相差が前記θkの前記コイル部が巻装された前記ティースの前記周方向の幅は、他の前記ティースの前記周方向の幅より大きい請求項1~4の何れか1項に記載の回転電機。
- 電気角位相差が前記θkの前記コイル部が収納された前記スロットの周方向の幅は、他の前記スロットの前記周方向の幅より大きい請求項1~5の何れか1項に記載の回転電機。
- yを自然数とし、(18±4)y極、18yスロットで構成されている請求項1~6の何れか1項に記載の回転電機。
- 直列コイル部群は、並列回路を構成し、各前記直列コイル部群は、同じ電気角位相差の前記コイル部同士の線径が等しい請求項1~7の何れか1項に記載の回転電機。
- 前記直列コイル部群を構成するm個(m≦n)の前記コイル部の内、電気角位相差が前記θkの前記コイル部のターン数を分子とし、残りの前記コイル部のターン数を分母として求めた比率をターン数比率と定義したとき、ターン数比率が1.0より大きく2.0以下である請求項7に記載の回転電機。
- 前記固定子鉄心の前記ティースの前記回転子側の先端部は、前記周方向の両隣の前記ティースの先端部と連結している請求項1~9の何れか1項に記載の回転電機。
- 前記回転電機は、電動機であり、
前記電機子巻線は、第1の電機子巻線部と第2の電機子巻線部とから構成され、前記第1の電機子巻線部及び前記第2の電機子巻線部は、それぞれ個別のインバータに接続されている請求項1~10の何れか1項に記載の回転電機。 - 前記電動機は、電動パワーステアリング装置に搭載される請求項11に記載の回転電機。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017547636A JP6415746B2 (ja) | 2015-10-28 | 2016-02-26 | 回転電機 |
| EP16859329.1A EP3370327A4 (en) | 2015-10-28 | 2016-02-26 | Rotary electric machine |
| CN201680061835.5A CN108141090B (zh) | 2015-10-28 | 2016-02-26 | 旋转电机 |
| US15/759,845 US10833549B2 (en) | 2015-10-28 | 2016-02-26 | Rotary electric machine |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015211874 | 2015-10-28 | ||
| JP2015-211874 | 2015-10-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017073092A1 true WO2017073092A1 (ja) | 2017-05-04 |
Family
ID=58631522
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/055896 WO2017073092A1 (ja) | 2015-10-28 | 2016-02-26 | 回転電機 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10833549B2 (ja) |
| EP (1) | EP3370327A4 (ja) |
| JP (1) | JP6415746B2 (ja) |
| CN (1) | CN108141090B (ja) |
| WO (1) | WO2017073092A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10404124B2 (en) | 2015-10-28 | 2019-09-03 | Mitsubishi Electric Corporation | Rotary electric machine |
| WO2021053797A1 (ja) * | 2019-09-19 | 2021-03-25 | 三菱電機株式会社 | 回転電機及び天井扇風機 |
| WO2021060102A1 (ja) * | 2019-09-23 | 2021-04-01 | 株式会社デンソートリム | 回転電機及び回転電機用ステータ |
| WO2021193462A1 (ja) * | 2020-03-25 | 2021-09-30 | ファナック株式会社 | モータ |
| JP2021164304A (ja) * | 2020-03-31 | 2021-10-11 | 日本電産株式会社 | モータ |
| WO2022009620A1 (ja) * | 2020-07-06 | 2022-01-13 | 株式会社デンソー | 回転電機 |
| JP7272793B2 (ja) | 2015-11-05 | 2023-05-12 | エルジー イノテック カンパニー リミテッド | バスバー、モーター、およびこれを含む動力伝達システム |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190068044A1 (en) * | 2010-01-25 | 2019-02-28 | Svetozar B. Petrovich | In Evolution of Gravity Fields |
| EP3439156B1 (en) * | 2016-03-29 | 2020-06-17 | Mitsubishi Electric Corporation | Electric motor |
| WO2017169131A1 (ja) * | 2016-03-30 | 2017-10-05 | 日本電産株式会社 | モータ |
| US11387764B2 (en) * | 2018-07-12 | 2022-07-12 | Zunum Aero, Inc. | Multi-inverter system for electric machine |
| US11043879B2 (en) * | 2018-08-07 | 2021-06-22 | Tau Motors, Inc. | Electric motor with flux barriers |
| JP7293702B2 (ja) * | 2019-02-08 | 2023-06-20 | 株式会社デンソー | 回転電機 |
| JP6912508B2 (ja) * | 2019-03-19 | 2021-08-04 | ファナック株式会社 | 固定子および電動機 |
| JP7103299B2 (ja) * | 2019-04-22 | 2022-07-20 | 株式会社デンソー | 回転電機 |
| GB2586989B (en) * | 2019-09-11 | 2022-07-27 | Rolls Royce Plc | Electric Machines |
| JP7227938B2 (ja) * | 2020-05-15 | 2023-02-22 | 株式会社デンソー | 回転電機 |
| WO2022020240A1 (en) * | 2020-07-20 | 2022-01-27 | Moog Inc. | Fault tolerant redundant electric motor |
| JP6991298B1 (ja) * | 2020-10-21 | 2022-01-12 | 三菱電機株式会社 | 電流検出装置 |
| CN116633059B (zh) * | 2023-05-15 | 2024-05-14 | 浙江大学 | 一种电机成型绕组结构及其加工方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011223676A (ja) * | 2010-04-06 | 2011-11-04 | Mitsubishi Electric Corp | 永久磁石式電動機 |
| WO2013080374A1 (ja) * | 2011-12-02 | 2013-06-06 | 三菱電機株式会社 | 永久磁石型集中巻モータ |
| JP2014068497A (ja) * | 2012-09-27 | 2014-04-17 | Hitachi Automotive Systems Ltd | 回転電機およびそれを用いた電動パワーステアリング装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2711008A (en) * | 1950-10-26 | 1955-06-21 | Beresford James & Son Ltd | Manufacture of stators for electric motors |
| US4403401A (en) * | 1978-09-15 | 1983-09-13 | General Electric Company | Method of making a dynamoelectric machine stator having concentric amorphous metal laminations |
| JP3604577B2 (ja) | 1999-02-26 | 2004-12-22 | 三菱電機株式会社 | 直流モータ |
| CN101258662A (zh) * | 2005-09-07 | 2008-09-03 | 株式会社美姿把 | 电动动力转向装置用马达 |
| JP2009213257A (ja) * | 2008-03-04 | 2009-09-17 | Hitachi Ltd | 回転電機 |
| JP5228582B2 (ja) | 2008-04-04 | 2013-07-03 | 三菱電機株式会社 | 永久磁石型回転電機およびそれを用いた電動パワーステアリング装置 |
| DE102009036034B4 (de) * | 2009-08-04 | 2011-07-07 | FEAAM GmbH, 85579 | Elektrische Maschine |
| DE102011078157A1 (de) | 2011-06-28 | 2013-01-03 | Robert Bosch Gmbh | Elektrische Maschine |
| JP2014158396A (ja) | 2013-02-18 | 2014-08-28 | Mitsubishi Electric Corp | 同期電動機の固定子 |
| KR102124042B1 (ko) | 2013-02-18 | 2020-06-18 | 삼성디스플레이 주식회사 | 기상 증착 장치, 이를 이용한 증착 방법 및 유기 발광 표시 장치 제조 방법 |
| CN104283350A (zh) * | 2013-07-02 | 2015-01-14 | 丹佛斯(天津)有限公司 | 定子、电机和压缩机 |
| JP5677530B2 (ja) * | 2013-08-07 | 2015-02-25 | 東芝産業機器システム株式会社 | 回転電機の固定子巻線、回転電機の固定子、回転電機の固定子の製造方法、及び回転電機の固定子の製造に用いる治具 |
-
2016
- 2016-02-26 JP JP2017547636A patent/JP6415746B2/ja active Active
- 2016-02-26 WO PCT/JP2016/055896 patent/WO2017073092A1/ja active Application Filing
- 2016-02-26 CN CN201680061835.5A patent/CN108141090B/zh active Active
- 2016-02-26 EP EP16859329.1A patent/EP3370327A4/en active Pending
- 2016-02-26 US US15/759,845 patent/US10833549B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011223676A (ja) * | 2010-04-06 | 2011-11-04 | Mitsubishi Electric Corp | 永久磁石式電動機 |
| WO2013080374A1 (ja) * | 2011-12-02 | 2013-06-06 | 三菱電機株式会社 | 永久磁石型集中巻モータ |
| JP2014068497A (ja) * | 2012-09-27 | 2014-04-17 | Hitachi Automotive Systems Ltd | 回転電機およびそれを用いた電動パワーステアリング装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3370327A4 * |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10404124B2 (en) | 2015-10-28 | 2019-09-03 | Mitsubishi Electric Corporation | Rotary electric machine |
| JP7272793B2 (ja) | 2015-11-05 | 2023-05-12 | エルジー イノテック カンパニー リミテッド | バスバー、モーター、およびこれを含む動力伝達システム |
| WO2021053797A1 (ja) * | 2019-09-19 | 2021-03-25 | 三菱電機株式会社 | 回転電機及び天井扇風機 |
| JPWO2021053797A1 (ja) * | 2019-09-19 | 2021-03-25 | ||
| JP7170891B2 (ja) | 2019-09-19 | 2022-11-14 | 三菱電機株式会社 | 回転電機及び天井扇風機 |
| WO2021060102A1 (ja) * | 2019-09-23 | 2021-04-01 | 株式会社デンソートリム | 回転電機及び回転電機用ステータ |
| JPWO2021060102A1 (ja) * | 2019-09-23 | 2021-10-21 | 株式会社デンソートリム | 回転電機及び回転電機用ステータ |
| WO2021193462A1 (ja) * | 2020-03-25 | 2021-09-30 | ファナック株式会社 | モータ |
| JP2021164304A (ja) * | 2020-03-31 | 2021-10-11 | 日本電産株式会社 | モータ |
| WO2022009620A1 (ja) * | 2020-07-06 | 2022-01-13 | 株式会社デンソー | 回転電機 |
| JP7512720B2 (ja) | 2020-07-06 | 2024-07-09 | 株式会社デンソー | 回転電機 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108141090B (zh) | 2019-10-18 |
| EP3370327A1 (en) | 2018-09-05 |
| CN108141090A (zh) | 2018-06-08 |
| JPWO2017073092A1 (ja) | 2018-02-22 |
| EP3370327A4 (en) | 2018-11-21 |
| US10833549B2 (en) | 2020-11-10 |
| US20180248433A1 (en) | 2018-08-30 |
| JP6415746B2 (ja) | 2018-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6415746B2 (ja) | 回転電機 | |
| JP5726329B2 (ja) | 永久磁石型集中巻モータ | |
| US10404124B2 (en) | Rotary electric machine | |
| US9800100B2 (en) | Permanent magnet motor and driving apparatus-integrated permanent magnet motor | |
| JP6091619B2 (ja) | 永久磁石型モータ、及び電動パワーステアリング装置 | |
| US9564779B2 (en) | Permanent magnet motor | |
| US9627936B2 (en) | Permanent magnet motor | |
| JP6636184B2 (ja) | 電動駆動装置および電動パワーステアリング装置 | |
| US20180115202A1 (en) | Rotary electric machine and electric power steering apparatus | |
| WO2016067695A1 (ja) | 回転電機および当該回転電機を用いた電動パワーステアリング装置 | |
| WO2016166796A1 (ja) | 電動駆動装置 | |
| JP5989154B2 (ja) | 永久磁石型モータ | |
| JP6188639B2 (ja) | 電動機 | |
| JP5905176B1 (ja) | 回転電機および当該回転電機を用いた電動パワーステアリング装置 | |
| JP5072734B2 (ja) | 永久磁石型回転電機およびパワーステアリング装置 | |
| JPWO2013054439A1 (ja) | 永久磁石型モータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16859329 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017547636 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15759845 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016859329 Country of ref document: EP |