WO2016148237A1 - 情報処理装置、及び、車両位置検出方法 - Google Patents
情報処理装置、及び、車両位置検出方法 Download PDFInfo
- Publication number
- WO2016148237A1 WO2016148237A1 PCT/JP2016/058501 JP2016058501W WO2016148237A1 WO 2016148237 A1 WO2016148237 A1 WO 2016148237A1 JP 2016058501 W JP2016058501 W JP 2016058501W WO 2016148237 A1 WO2016148237 A1 WO 2016148237A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- image data
- road
- information
- calculated
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/005—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 with correlation of navigation data from several sources, e.g. map or contour matching
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3602—Input other than that of destination using image analysis, e.g. detection of road signs, lanes, buildings, real preceding vehicles using a camera
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3667—Display of a road map
- G01C21/367—Details, e.g. road map scale, orientation, zooming, illumination, level of detail, scrolling of road map or positioning of current position marker
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/582—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of traffic signs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/0969—Systems involving transmission of navigation instructions to the vehicle having a display in the form of a map
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3664—Details of the user input interface, e.g. buttons, knobs or sliders, including those provided on a touch screen; remote controllers; input using gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Definitions
- the present invention relates to a technique for detecting the position of a vehicle.
- Patent Document 1 describes that “the current location of a vehicle is detected using dead reckoning, the current location information of the vehicle is managed, and the amount of movement in the left-right direction is determined using the dead reckoning navigation.
- the current position detection means detects the current position of the vehicle using dead reckoning, and the lane movement detection means "The movement is detected, and the current location information of the vehicle including the lane position is managed by the current location information management means.”
- Patent Document 1 since the technique described in Patent Document 1 detects the current position of the vehicle by using the accumulated amount of movement of the vehicle, if the travel distance of the vehicle increases, the detected position of the vehicle and the actual vehicle There is a problem that an error from the position becomes large.
- the present invention has been made in view of the above-described circumstances, and an object thereof is to calculate the position of a vehicle on a road with higher accuracy.
- an information processing apparatus mounted on a vehicle acquires captured image data obtained by capturing the outside of the vehicle, and the captured image data includes a predetermined object.
- target image data that is image data is included, the relative position of the vehicle with respect to the target is calculated based on the target image data, and the position of the vehicle on the road is calculated based on the calculated relative position.
- a control unit for detection is provided.
- control unit may include the target image data in the captured image data based on a comparison result between the image data corresponding to the stored target image data and the captured image data. It is characterized by determining whether it is included.
- the information processing apparatus of the present invention includes a storage unit that stores road information including information indicating a position of the object and information indicating a relationship between the object and the road, and the control unit calculates The position of the vehicle on the road is calculated based on the relative position and the road information stored in the storage unit.
- control unit calculates, as the relative position, a perpendicular separation distance that is a separation distance between the vehicle and the object in a direction intersecting the traveling direction of the vehicle.
- the position of the vehicle on the road is calculated based on the perpendicular separation distance and the road information stored in the storage unit.
- the road information includes information on a width of a lane that the road has, and information on a separation distance between the object and the road
- the control unit calculates the perpendicular direction Based on the separation distance and the road information stored in the storage unit, a lane in which the vehicle is traveling is specified.
- the information processing apparatus of the present invention is characterized in that the object includes a road sign.
- the information processing apparatus of the present invention includes an interface to which a photographing apparatus having a photographing function can be connected, and the control unit receives and acquires the photographed image data from the photographing apparatus via the interface.
- the control unit acquires photographed image data obtained by photographing the outside of the vehicle, and the photographed image data includes a predetermined object. If the target image data is included, the relative position of the vehicle with respect to the target is calculated based on the target image data, and the position of the vehicle on the road is calculated based on the calculated relative position. Is detected.
- the vehicle position detection method of the present invention stores image data corresponding to the target image data, and based on a comparison result between the image data corresponding to the stored target image data and the captured image data, It is determined whether or not the target image data is included in the image data.
- the vehicle position detection method of the present invention is based on road information including the calculated relative position, information indicating the position of the object, and information indicating a relationship between the object and the road. The position on the road is calculated.
- the vehicle position detection method of the present invention calculates, as the relative position, a perpendicular separation distance that is a separation distance between the vehicle and the object in a direction intersecting the traveling direction of the vehicle, and the computed perpendicular direction The position of the vehicle on the road is calculated based on the separation distance and the road information stored in the storage unit.
- the vehicle position detection method of the present invention is based on the road information including the calculated perpendicular separation distance, information on the width of the lane of the road and information on the separation distance between the object and the road.
- a lane in which the vehicle is traveling is specified.
- the present invention provides an information processing apparatus that is communicably connected to a vehicle-mounted device mounted on a vehicle via a network, and images the outside of the vehicle from the vehicle-mounted device.
- the captured image data includes target image data that is image data of a predetermined target, the relative position of the vehicle with respect to the target based on the target image data
- a control unit that detects the position of the vehicle on the road based on the calculated relative position and notifies the in-vehicle device of the detection result.
- the position of the vehicle on the road can be calculated with higher accuracy.
- FIG. 1 is a block diagram showing a functional configuration of the in-vehicle navigation device according to the first embodiment.
- FIG. 2 is a diagram illustrating a relationship among a driving lane, a vehicle, and a road sign.
- FIG. 3 is a flowchart showing the operation of the in-vehicle navigation device.
- FIG. 4 is a diagram illustrating an example of captured image data.
- FIG. 5 is a diagram illustrating a data structure of road information data.
- FIG. 6 is a flowchart showing the operation of the in-vehicle navigation device according to the second embodiment.
- FIG. 7 is a diagram illustrating a relationship among a driving lane, a vehicle, and a road sign.
- FIG. 1 is a block diagram showing a functional configuration of the in-vehicle navigation device according to the first embodiment.
- FIG. 2 is a diagram illustrating a relationship among a driving lane, a vehicle, and a road sign.
- FIG. 3 is a
- FIG. 8 is a flowchart showing the operation of the in-vehicle navigation device according to the third embodiment.
- FIG. 9 is a diagram illustrating a relationship between a driving lane, a vehicle, and a road sign.
- FIG. 10 is a diagram illustrating a configuration of a vehicle position detection system according to the fourth embodiment.
- FIG. 1 is a block diagram showing a functional configuration of an in-vehicle navigation device 1 (information processing device) according to the first embodiment.
- the in-vehicle navigation device 1 is a device mounted on a vehicle, and displays a map for displaying the current position of the vehicle on the displayed map by displaying a map for displaying the vehicle position detection function for detecting the current position of the vehicle.
- a route search function that searches for a route to the destination, and a route display that displays a map, displays a route to the destination on the map, and guides the route to the destination It has a function.
- a vehicle equipped with the in-vehicle navigation device 1 is expressed as “own vehicle”.
- the in-vehicle navigation device 1 includes a control unit 10, a touch panel 11, a storage unit 12, a GPS unit 13, a relative orientation detection unit 14, an interface 15, and a vehicle speed acquisition unit 16. Prepare.
- the control unit 10 includes a CPU, a ROM, a RAM, other peripheral circuits, and the like, and controls each unit of the in-vehicle navigation device 1.
- the CPU 10 controls each unit of the in-vehicle navigation device 1 in cooperation with hardware and software such that the CPU reads and executes a control program stored in the ROM.
- the touch panel 11 includes a display panel 111 and a touch sensor 112.
- the display panel 111 includes a display device such as a liquid crystal display panel or an organic EL panel, and displays various images according to the control of the control unit 10.
- the touch sensor 112 is disposed so as to overlap the display panel 111, detects a user's touch operation, and outputs a signal indicating the touch operation to the control unit 10. Based on the signal input from the touch sensor 112, the control unit 10 executes a process corresponding to the user's touch operation.
- the storage unit 12 includes a nonvolatile memory and stores various data.
- the storage unit 12 stores map data 121.
- the map data 121 includes parcel data.
- Parcel data is data used in the above-described map display and route guidance, road drawing data related to the drawing of road shapes, background drawing data related to drawing of backgrounds such as topography, character strings such as administrative divisions Drawing data relating to the display of the map, such as character string drawing data relating to the drawing.
- the road drawing data includes node information having information on nodes corresponding to connection points in a road network such as intersections, and link information having information on links corresponding to roads formed between the nodes, It also contains information necessary for route guidance.
- the map data 121 includes region data.
- Region data is data used in the route search described above, and corresponds to node information having information on nodes corresponding to connection points in a road network such as intersections and roads formed between nodes. It includes information necessary for route search, such as link information having information about links.
- the map data 121 includes road information data 1211. The road information data 1211 will be described later.
- the GPS unit 13 receives GPS radio waves from GPS satellites via a GPS antenna (not shown), and acquires the current position and traveling direction of the host vehicle from the GPS signals superimposed on the GPS radio waves by calculation.
- the GPS unit 13 outputs the acquisition result to the control unit 10.
- the relative orientation detection unit 14 includes a gyro sensor and an acceleration sensor.
- the gyro sensor is constituted by, for example, a vibrating gyroscope and detects a relative direction (for example, a turning amount in the yaw axis direction) of the host vehicle.
- the acceleration sensor detects acceleration acting on the host vehicle (for example, tilt of the host vehicle with respect to the traveling direction).
- the relative orientation detection unit 14 outputs the detection results of the gyro sensor and the acceleration sensor to the control unit 10.
- the vehicle speed acquisition unit 16 is connected to, for example, a sensor that detects a vehicle speed pulse, detects the vehicle speed of the host vehicle based on the vehicle speed pulse input from the sensor, and communicates with, for example, an ECU (Engine ControltorUnit).
- the vehicle speed of the host vehicle is detected by acquiring information about the vehicle speed from the ECU.
- the vehicle speed acquisition unit 16 outputs the detection result to the control unit 10.
- the control unit 10 detects the vehicle speed of the host vehicle based on the input from the vehicle speed acquisition unit 16.
- the control unit 10 When detecting the position of the host vehicle, the control unit 10 detects the state of the host vehicle such as the vehicle speed detected based on the input from the GPS unit 13 and the relative bearing detection unit 14, the input from the vehicle speed acquisition unit 16, and Then, the current position of the host vehicle is estimated based on the map data 121, and the current position estimated by a method to be described later is appropriately corrected to detect the current position of the host vehicle.
- control unit 10 displays the detected current position of the host vehicle on the map displayed on the touch panel 11.
- control unit 10 searches for a route from the detected current position to the destination set by the user based on the map data 121.
- route guidance the control unit 10 displays the current position of the displayed vehicle on the map while guiding the route while showing the route to the destination on the map.
- the interface 15 is connected to an external device, and communicates with the connected external device according to a predetermined protocol under the control of the control unit 10.
- an in-vehicle camera 20 imaging device
- an external device is connected to the interface 15 as an external device.
- the in-vehicle camera 20 is a stereo camera having two photographing units that photograph the front of the host vehicle.
- the lens mechanisms of the two photographing units are arranged inside the windshield of the host vehicle and spaced apart in the left-right direction, which is a direction orthogonal to the front-rear direction of the host vehicle.
- Each of the two photographing units performs photographing in synchronization with a predetermined cycle.
- the in-vehicle camera 20 generates two captured image data based on the imaging results of the two imaging units, and outputs the generated two captured image data to the control unit 10 via the interface 15.
- the vehicle-mounted navigation apparatus 1 which concerns on this embodiment has a function which performs the own vehicle position detection which detects the present position of the own vehicle. And about the own vehicle position detection, there is a need to detect the current position of the own vehicle on the traveling road with the highest possible accuracy. In particular, with regard to detecting the position of the host vehicle, there is a need to detect which lane the host vehicle is traveling among the plurality of lanes with as high accuracy as possible when the running road has a plurality of lanes. By detecting the lane in which the host vehicle is traveling (hereinafter referred to as “traveling lane”) with high accuracy, the user can be more accurately notified of the lane in which the host vehicle is traveling when displaying a map. In route guidance, it is possible to accurately notify a change in lane for smoothly traveling the searched route, and the convenience for the user is improved. Based on the above, the vehicle-mounted navigation device 1 detects the lane in which the host vehicle is traveling by the following method.
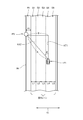
- FIG. 2 shows a road used to detect the position of the host vehicle in a process P1, which is the current position of the host vehicle, and the current position of the host vehicle when the host vehicle is traveling in a predetermined travel lane. It is a figure which shows an example of the relationship with the position P2 which is the position of a sign (hereinafter, simply referred to as “road sign”).
- FIG. 3 is a flowchart showing the operation of the in-vehicle navigation device 1 when detecting the lane in which the host vehicle is traveling.
- the shape of the travel lane is the same as the travel lane illustrated in FIG. 2, and the travel lane, the current position of the host vehicle, and the road sign It is assumed that the relationship with the position conforms to the relationship illustrated in FIG. That is, it is assumed that the travel lane has a plurality of lanes (in the example of FIG. 2, five lanes of the first lane S1 to the fifth lane S5). Further, the travel lane is not bent from the current position of the host vehicle (position P1 in the example of FIG. 2) to at least the position of the road sign (position P2 in the example of FIG. 2) in the traveling direction. It is assumed that the number of lanes does not change and the width of each lane does not change substantially.
- the leftmost lane in the traveling direction (the first lane S1 in the example of FIG. 2) has a roadside zone (in the example of FIG. 2) along the lane. It is assumed that the roadside band R1) extends.
- the position of the road sign (position P2 in the example of FIG. 2) is diagonally left frontward in the traveling direction from the position of the own vehicle (position P1 in the example of FIG. 2), and is mounted on the own vehicle. It is assumed that the position can be taken by the in-vehicle camera 20.
- the direction intersecting with the traveling direction of the host vehicle is referred to as “right angle direction” (in the example of FIG. 2, the right angle direction Y1).
- the control unit 10 of the in-vehicle navigation device 1 acquires captured image data output from the in-vehicle camera 20 (step SA1).
- the in-vehicle camera 20 captures the front of the host vehicle at a predetermined cycle in synchronization with the two capturing units, and outputs captured image data based on the capturing result to the control unit 10. Therefore, the control unit 10 executes the process of step SA1 in a cycle corresponding to the cycle in which the in-vehicle camera 20 outputs the captured image data, and triggers the execution of the process of step SA1 (acquisition of captured image data). The following processing is executed.
- step SA2 the control unit 10 analyzes the captured image data acquired in step SA1 and adds a road sign (hereinafter referred to as “maximum speed road sign”) indicating the maximum speed (restricted speed, regulated speed) in the captured image data. It is determined whether or not target image data that is image data of the image is included (step SA2).
- step SA2 the process of step SA2 will be described in detail. Note that the control unit 10 executes the process of step SA2 using any one of the captured image data input in synchronization with the two stereo cameras.
- FIG. 4 is a diagram schematically illustrating an example of photographed image data in a mode suitable for explanation.
- the captured image data includes dots having information relating to colors (for example, information representing the color components of each RGB color by gradation values of a predetermined gradation) in a dot matrix corresponding to a predetermined resolution. It is the arranged image data.
- the map data 121 includes image data (hereinafter referred to as “template image data”) used as a template in pattern matching for each of the maximum speed road signs for each maximum speed.
- the template image data corresponds to “image data corresponding to the stored target image data”.
- the control unit 10 performs pattern matching using the template image data included in the map data 121, and determines whether or not the captured image data includes target image data.
- the area A1 is image data of an image of a maximum speed road sign indicating that the maximum speed is 50 km / h, and the image data corresponding to the area A1 corresponds to target image data. Therefore, when acquiring the captured image data of FIG.
- the control unit 10 uses the template image data related to the template of the image of the maximum speed road sign indicating that the maximum speed is 50 km / h in step SA2. Based on the pattern matching, it is determined that the target image data is included in the captured image data.
- step SA2 in order to improve the accuracy of determining whether or not the target image data is included in the captured image data and the accuracy of calculating the distance between the marked vehicles described later, the controller 10 captures the captured image data.
- the size of the target image data included in the image data is equal to or larger than a predetermined threshold, it may be determined that the target image data is included in the captured image data.
- the method for determining whether or not the target image data is included in the captured image data is not limited to the method using pattern matching, and any method may be used.
- step SA2 If it is determined in step SA2 that the target image data is not included in the captured image data (step SA2: NO), the control unit 10 ends the process.
- step SA2 When it is determined in step SA2 that the target image data is included in the captured image data (step SA2: YES), the control unit 10 captures a captured road sign (maximum speed road sign) based on the target image data. Is recognized (step SA3).
- a captured road sign maximum speed road sign
- the control unit 10 analyzes the target image data and acquires the type of road sign corresponding to the target image data.
- the control unit 10 specifies a character string or a figure included in a road sign corresponding to the target image data by a method such as pattern matching.
- the map data 121 includes information for associating a character string or a figure included in the road sign with the type of road sign for each type of road sign. Based on the information, the control unit 10 acquires the specified character string and the type of road sign corresponding to the figure.
- the method for identifying the type of road sign is not limited to a method based on a character string or a graphic included in the road sign, and any method may be used.
- the method of specifying the type of road sign may be a method of specifying the type of road sign reflecting the shape, color, etc. of the road sign.
- the control unit 10 sets the distance between the road sign corresponding to the target image data and the own vehicle (hereinafter referred to as “the distance between the marked vehicles. In the example of FIG. 2, the distance A between the marked vehicles)”. calculate.
- the control unit 10 calculates the distance between the marked vehicles by the existing image processing using the difference (parallax) of the target image data in the two captured image data of the two imaging units input from the in-vehicle camera 20. To do.
- the method for calculating the distance between the marked vehicles is not limited to the exemplified method, and any method may be used.
- the control unit 10 may calculate the distance between the marked vehicles by a predetermined means based on the size of the target image data in the captured image data.
- step SA5 the control unit 10 makes a virtual straight line extending in the traveling direction of the host vehicle (virtual straight line KT1 in the example of FIG. 2) and a virtual straight line connecting the host vehicle and the road sign (in the example of FIG. 2).
- a virtual straight line KT2 (hereinafter referred to as “an angle between the marked vehicles.
- an angle ⁇ ) is calculated.
- the control unit 10 determines the distance between the marked vehicles calculated in step SA4, the position of the target image data in the two captured image data of the two imaging units input from the in-vehicle camera 20, and the boundary of the lane in the captured image data.
- the angle between the marked vehicles is calculated by the existing image processing based on the direction of the white line indicating. Note that the method for calculating the angle between the marked vehicles is not limited to the exemplified method, and any method may be used.
- step SA6 the control unit 10 performs a perpendicular direction (in FIG. 4) between the current position of the host vehicle (position P1 in the example of FIG. 2) and the position of the road sign (position P2 in the example of FIG. 2).
- a distance in the right angle direction Y1) (hereinafter referred to as “right angle direction separation distance”.
- the right angle direction separation distance B) is calculated.
- the control unit 10 calculates the perpendicular separation distance by the following formula M1.
- the control unit 10 detects the current position of the host vehicle based on inputs from the GPS unit 13, the relative direction detection unit 14, and the vehicle speed acquisition unit 16 (step SA7).
- the current position of the host vehicle detected based on inputs from the GPS unit 13 and the relative direction detection unit 14 is expressed as “estimated current position”. Since the estimated current position is calculated using the input from the GPS unit 13, an error derived from GPS may occur, and it is not appropriate to detect the traveling lane based on the estimated current position.
- the estimated current position represents the current position of the host vehicle with longitude and latitude.
- the control unit 10 refers to the road information data 1211 (step SA8).
- the road information data 1211 is a database having a record for each of the road signs (road signs managed by the map data 121) displayed on the map based on the map data 121.
- FIG. 5 is a diagram showing the data structure of one record of the road information data 1211. As shown in FIG. 5, one record of the road information data 1211 includes sign information J1 and corresponding road information J2.
- the sign information J1 is information related to the road sign, and is represented by a sign ID J11 for uniquely identifying the road sign, a sign type information J12 indicating the type of the road sign, and a position (longitude and latitude) of the road sign. Label position information J13 indicating the position).
- Corresponding road information J2 is information relating to a road on which a road sign is provided.
- the road provided with the road sign means a road on one side where traveling according to the rules indicated by the road sign is required.
- Corresponding road information J2 includes road link IDJ21 (identification information allocated for each link in the above-described region data or parcel data link information), lane number information J22 indicating the number of lanes of the road, and road signs.
- Road separation information J23 indicating a separation distance between the left end of the leftmost lane in the traveling direction and the position of the road sign (hereinafter referred to as a “sign road separation distance”);
- Corresponding road information J2 includes first lane width information J241 to nth lane width information J24n indicating the width of the lane for each of n (where n is an integer equal to or greater than “1”) lanes on the road.
- n lanes are expressed as a first lane, a second lane,..., An nth lane in order from the leftmost lane in the traveling direction.
- the road separation information J23 corresponds to “information about the separation distance between the object and the road”.
- step SA9 the control unit 10 specifies a road sign record corresponding to the target image data from the records of the road information data 1211.
- step SA9 the process of step SA9 will be described in detail.
- step SA9 the control unit 10 records that the position indicated by the sign position information J13 in the road information data 1211 and the estimated current position detected in step SA7 have a predetermined relationship among the records included in the road information data 1211.
- the position indicated by the sign position information J13 in the road information data 1211 and the estimated current position detected in step SA7 have a predetermined relationship
- the position indicated by the sign position information J13 is a vehicle-mounted camera starting from the estimated current position. It means being within 20 shooting ranges.
- the control unit 10 identifies the extracted record as a road sign record corresponding to the target image data. On the other hand, there may be a case where there are a plurality of records to be extracted.
- the control unit 10 selects a record in which the type of road sign indicated by the sign type information J12 matches the type of road sign corresponding to the target image data acquired in step SA3 among the plurality of extracted records. It is specified as a road sign record corresponding to the image data.
- the same kind of road signs are arranged apart from each other by a predetermined distance or more. Therefore, by identifying the corresponding record by the above method, the road sign record corresponding to the target image data can be appropriately identified.
- step SA10 the control unit 10 acquires the road separation information J23 and the first lane width information J241 to the nth lane width information J24n based on the record specified in step SA9.
- control unit 10 determines whether the host vehicle is based on the separation distance in the perpendicular direction calculated in step SA6, the road separation information J23 acquired in step SA10, and the first lane width information J241 to the nth lane width information J24n.
- a traveling lane (traveling lane) is specified (step SA11).
- the process of step SA11 will be described in detail.
- the lane in which the host vehicle is traveling can be specified by the relationship between the separation distance in the perpendicular direction, the separation distance of the sign road, and the width of each lane that the road has. That is, the separation distance in the perpendicular direction, the separation distance of the sign road, and the widths of the first lane to the nth lane of the road (travel lane) have the following relationship.
- “Signal road separation distance + width of first lane + ... + (m-1) lane width ⁇ right-angle direction separation distance ⁇ sign road separation distance + first lane width + ... + m-th lane Width (where m is an integer greater than or equal to" 1 ").
- the lane (traveling lane) in which the host vehicle is traveling is the mth lane.
- the perpendicular distance C, the sign road separation distance H1, and the widths L1 to L5 of the first lane S1 to the fifth lane S5 of the road (travel lane) are as follows: It is in. “Signal road separation distance H1 + width L1 + width L2 ⁇ right-angle direction separation distance C ⁇ sign road separation distance H1 + width L1 + width L2 + width L3”.
- the lane in which the host vehicle is traveling is the third lane S3.
- step SA11 the control unit 10 determines the lane (travel) in which the host vehicle is traveling based on the relationship between the separation distance in the perpendicular direction, the separation distance between the sign road, and the width of each lane that the road has. Lane).
- the control unit 10 calculates the angle between the marked vehicles, the distance between the marked vehicles, and the separation distance in the perpendicular direction. Then, if the angle between the marked vehicles and the distance between the marked vehicles are determined, the position of the own vehicle with respect to the road sign is determined. Therefore, the angle between the marked vehicles and the distance between the marked vehicles are determined according to “the road sign (object)”. This corresponds to the “relative position of the host vehicle (vehicle)”.
- the right-angle direction separation distance is set to “relative position of the own vehicle (vehicle) with respect to the road sign (object)”. Equivalent to.
- the control unit 10 detects the lane in which the host vehicle travels using the calculated inter-signed vehicle angle, the inter-signed vehicle distance, and the perpendicular separation distance.
- these relative positions can be used in other ways when detecting the host vehicle.
- the control part 10 can detect the relative position of the own vehicle with respect to a road sign based on the angle between labeled vehicles and the distance between labeled vehicles. Therefore, the control unit 10 can detect the position of the host vehicle on the map by acquiring the position of the road sign on the map. And if the estimated current position detected by input from the GPS unit 13 or the like is corrected by the position on the map of the own vehicle detected based on the angle between the marked vehicles and the distance between the marked vehicles, higher accuracy is obtained.
- the position of the host vehicle can be detected.
- an automatic driving system including not only a system related to complete automatic driving but also a system that supports automatic driving in a predetermined case
- the position of the host vehicle can be detected with higher accuracy by using the calculated angle between the marked vehicles, the distance between the marked vehicles, and the separation distance in the perpendicular direction.
- the in-vehicle navigation device 1 acquires captured image data obtained by capturing the outside of the host vehicle (vehicle), and includes road signs in the captured image data.
- target image data that is image data of (predetermined target) is included, based on the target image data, the relative position of the vehicle with respect to the road sign (a combination of the angle between the marked vehicles and the distance between the marked vehicles, or a right angle)
- a control unit 10 that detects the position of the vehicle on the road based on the calculated relative position.
- the relative position of the host vehicle with respect to the road sign is calculated based on the target image data included in the captured image data, and the position of the host vehicle on the road is detected based on the calculated relative position. Therefore, for example, compared to the case where the current position of the vehicle is detected using the accumulated movement amount of the vehicle, the position detection error associated with the increase in the travel distance of the vehicle does not occur, and the vehicle is detected with high accuracy.
- the position on the road can be calculated.
- the vehicle-mounted navigation apparatus 1 includes a storage unit 12 that stores road information data 1211 having road information including information indicating the position of the road sign and information indicating the relationship between the road sign and the road. .
- road information data 1211 having road information including information indicating the position of the road sign and information indicating the relationship between the road sign and the road.
- the control unit 10 can detect the position of the host vehicle on the road with high accuracy based on the calculated relative position using the road information included in the road information data 1211.
- the control unit 10 calculates and calculates, as a relative position, a perpendicular separation distance that is a separation distance between the own vehicle and the road sign in a perpendicular direction (a direction intersecting the traveling direction of the own vehicle). Based on the perpendicular separation distance and the road information data 1211, the position of the host vehicle on the road is calculated. According to this configuration, the control unit 10 uses the road information included in the road information data 1211 to detect the position of the host vehicle on the road with high accuracy based on the calculated perpendicular separation distance.
- the road information of the road information data 1211 includes the first lane width information J241 to the nth lane width information J24n (information on the width of the lane that the road has), and the road separation information J23 (object and object). Information on the distance from the road). Then, the control unit 10 identifies the lane in which the host vehicle is traveling based on the calculated perpendicular separation distance and the road information data 1211. According to this configuration, using the road information included in the road information data 1211, the position of the host vehicle on the road is detected with high accuracy based on the calculated perpendicular separation distance.
- FIG. 6 is a flowchart showing an operation when the in-vehicle navigation device 1 according to the present embodiment detects a lane in which the host vehicle is traveling.
- FIG. 7 is a diagram illustrating the relationship among the travel lane, the position of the road sign, and the position of the host vehicle in order to explain the processing of the in-vehicle navigation device 1 according to the present embodiment.
- the in-vehicle device executes different processes for the processes of Step SA4 to Step SA6 among the processes described using the flowchart of FIG. 3 in the first embodiment. Based on this, in the flowchart of FIG. 6, steps in which the same processing as that in FIG. 3 is performed are assigned the same reference numerals and description thereof is omitted. In the following, the process of steps SB1 to SB5 performed in place of the process of steps SA4 to SA6 in FIG. 3 will be described.
- step SB ⁇ b> 1 the control unit 10 calculates the angle between the marked vehicles by a method similar to the method described in the first embodiment.
- the position of the own vehicle at the timing of executing the process of step SB1 is the position Q1
- the position of the road sign is the position Q2
- the control unit 10 The angle ⁇ 1 is calculated as the angle.
- step SB2 the control unit 10 monitors whether or not the host vehicle has traveled a predetermined distance or more from the timing at which the process of step SB1 is executed (step SB2).
- the detection that the vehicle has traveled over a certain distance in step SB2 does not need to be a strict detection. For example, if there is a high possibility that the vehicle has traveled over a certain distance due to the relationship between the vehicle speed and the travel time, the vehicle travels a certain distance. As described above, it may be determined that the vehicle has traveled.
- step SB3 the second inter-vehicle angle is calculated based on the position Q3) (step SB3).
- the angle between the second marked vehicles is a virtual straight line extending in the traveling direction of the host vehicle (virtual straight line KT3 in the example of FIG. 7), and a second current position of the host vehicle (position Q3 in the example of FIG. 7). This is an angle with a virtual straight line (virtual straight line KT4 in the example of FIG.
- step SB3 the control unit 10 calculates the second labeled vehicle angle in the same manner as the method for calculating the labeled vehicle angle described in the first embodiment.
- the control unit 10 determines the position of the host vehicle at the timing when the process of step SB1 is executed (position Q1 in the example of FIG. 7) and the position of the host vehicle at the timing when the process of step SB3 is executed (see FIG. In the example of FIG. 7, the distance (hereinafter referred to as “vehicle travel distance”. In the example of FIG. 7, the vehicle travel distance E) is calculated (step SB4).
- the control unit 10 is based on the input from the GPS unit 13 and the relative bearing detection unit 14, and the estimated current position of the host vehicle at the time when the process of step SB1 is executed, and the step SB3.
- the estimated current position of the host vehicle at the time when the process is executed is detected, and the vehicle travel distance is calculated by appropriately correcting the vehicle speed and the like during travel.
- the control unit 10 includes an image of a predetermined object (may be a road sign) in the captured image data based on the shooting performed by the in-vehicle camera 20 at the timing when the process of step SB1 is executed, and step SB3.
- the vehicle travel distance is calculated based on the mode of change of the image of the predetermined object in the photographed image data based on the photographing performed by the in-vehicle camera 20 at the timing when the above process is executed.
- the method for calculating the vehicle travel distance is not limited to the exemplified method, and any method may be used.
- control unit 10 determines the angle between the marked vehicles calculated in Step SB1 (the angle ⁇ 1 in the example of FIG. 7), the second angle between the marked vehicles calculated in the step SB3 (the angle ⁇ 2 in the example of FIG. 7), and Based on the vehicle travel distance calculated in step SB4 (vehicle travel distance E in the example of FIG. 7), a perpendicular separation distance (in the example of FIG. 7, perpendicular separation distance C) is calculated (step SB5).
- a second current position position Q3 in the example of FIG. 7
- a virtual straight line virtual straight line KT3 in the example of FIG. 7
- a road that passes through the second current position and extends in the traveling direction of the host vehicle.
- the distance from the intersection of a virtual straight line (virtual straight line KT5 in the example of FIG. 7) that passes through the position of the sign (position Q2 in the example of FIG. 7) and extends in the right-angle direction is the “corresponding distance” (example of FIG. 7). Then, if the corresponding distance x.), The following equation holds.
- tan ⁇ 1 right-angle direction separation distance C / (vehicle travel distance E + corresponding distance x)
- tan ⁇ 2 separation distance C in the right-angle direction / corresponding distance x
- the perpendicular distance C can be calculated by the following equation M4 ′.
- Right-angle direction separation distance C (vehicle travel distance E ⁇ tan ⁇ 1 ⁇ tan ⁇ 2) / (tan ⁇ 2 ⁇ tan ⁇ 1)
- Step SB5 the control unit 10 calculates the perpendicular separation distance using the above-described equation M4.
- the control unit 10 of the in-vehicle navigation device 1 detects the position of the host vehicle (the lane in which the vehicle is traveling) has been described. If the processing described in the present embodiment is performed, the position of the host vehicle can be detected with higher accuracy, as in the first embodiment.
- the calculation of the angle (the angle between the marked vehicles and the angle between the second marked vehicles) with the current position of the own vehicle as the apex is performed twice.
- the configuration may be such that the relative position (separation distance in the perpendicular direction) of the host vehicle with respect to the road sign is calculated by a method corresponding to the above-described method based on the calculated and executed angles three or more times.
- the relative position can be calculated with higher accuracy.
- the in-vehicle camera 20 captures the front of the host vehicle, and the control unit 10 calculates the relative position of the host vehicle with respect to the road sign based on the captured image data based on the capturing result in front of the host vehicle. did.
- the control unit 10 is based on the side of the host vehicle or the result of photographing the rear side by the method described above. Based on the captured image data, it is possible to calculate the relative position of the vehicle with respect to the road sign.
- FIG. 8 is a flowchart showing the operation of the in-vehicle navigation device 1 according to this embodiment.
- FIG. 9 shows the position of a road sign used for detecting the travel lane, the current position of the host vehicle Z1, and the position of the host vehicle when the host vehicle is traveling in a predetermined travel lane. It is a figure which shows an example of the relationship with a certain position Z2.
- the in-vehicle navigation device 1 executes the process of the flowchart shown in FIG. 8 in the following case. That is, when the captured image data includes target image data related to the road sign image, the control unit 10 of the in-vehicle navigation device 1 uses a predetermined means to start from the current position of the host vehicle to the road sign. To determine whether the road is bent. For example, the control unit 10 acquires link information of a road (travel lane) on which the host vehicle travels, and based on the relationship between the link information, the position of the host vehicle, and the position of the road sign, It is determined whether the road is bent between the position and the road sign. The method for determining whether the road is bent is not limited to the exemplified method, and any method may be used. When the control unit 10 determines that the road is bent between the current position of the host vehicle and the road sign, the control unit 10 performs the process of the flowchart of FIG.
- control unit 10 is executing processing corresponding to step SA1 and step SA3 of the flowchart of FIG.
- the control unit 10 of the in-vehicle navigation device 1 is a method similar to the method described in the first embodiment, and based on the target image data related to the road sign image included in the captured image data.
- a distance between the marked vehicles in the example of FIG. 9, a distance F between the marked vehicles
- an angle between the marked vehicles angle ⁇ 3 in the example of FIG. 9 are calculated (step SC1).
- the control unit 10 refers to the road information data 1211 and identifies a road sign record corresponding to the aspect image data in the same method as described in the first embodiment, and the identified record has
- the marker position information J13 is acquired (step SC2).
- the sign position information J13 is the position of the road sign (position expressed by longitude and latitude.
- the coordinates based on the map data 121 may be coordinates in a predetermined coordinate system). It is information which shows.
- the control unit 10 determines the position of the road sign (position Z2 in the example of FIG. 9) indicated by the sign position information J13 acquired in step SC2 and the distance between the marked vehicles calculated in step SC1 (in the example of FIG. 9, Based on the distance between the marked vehicles F.) and the angle between the marked vehicles (in the example of FIG. 9, the angle ⁇ 3), the current position of the host vehicle (the position Z1 in the example of FIG. 9) is calculated (step SC3). .
- the distance between the marked vehicles and the angle between the marked vehicles the relative position of the own vehicle with respect to the road sign is determined. Therefore, the current position of the own vehicle is determined by determining the position of the road sign.
- the control unit 10 refers to the map data 121 and acquires information about the center line of the road (travel lane) on which the host vehicle travels (hereinafter referred to as “center line information”) (step SC4).
- the center line of the road is a line that follows the center in the direction perpendicular to the entire road width including the traveling lane with which the traveling direction is opposite on the roadway.
- Line TS In the example of FIG. Line TS.
- the center line on the map is managed as a collection of straight lines (hereinafter referred to as “unit straight lines”) along the center line.
- the center line TS is managed as a unit straight line TS1 and a unit straight line TS2.
- the map data 121 includes unit line information including a position on the map at one end and a position on the map at the other end for each unit line.
- the control unit 10 acquires unit straight line information of a unit straight line (in the example of FIG. 9, a unit straight line TS1) located on the side of the position of the host vehicle as center line information.
- control unit 10 determines the current position of the own vehicle, the perpendicular line, and the unit straight line when the perpendicular line is dropped from the current position of the own vehicle with respect to the unit straight line indicated by the unit straight line information acquired in step SC4.
- the length with the intersection (length N2 in the example of FIG. 9) is calculated (step SC5).
- control unit 10 refers to the road information data 1211 and acquires the first lane width information J241 to the nth lane width information J24n of the road that is running (step SC6).
- the control unit 10 determines the center line information (unit straight line information) acquired in step SC4, the length of the perpendicular calculated in step SC5, and the first lane width information J241 to the nth lane width information acquired in step SC6. Based on J24n, the lane in which the host vehicle is traveling is specified (step SC7).
- the lane in which the host vehicle is traveling is specified (step SC7).
- the width of each lane provided on the road and the distance between the center line and the current position of the host vehicle are determined, the lane in which the host vehicle is positioned is determined.
- step SC7 the control unit 10 calculates the position of the intersection of the perpendicular and the center line on the map, and based on the relationship between the position, the length of the perpendicular, and the width of the lane. Identify the lane in which the vehicle is traveling.
- control unit 10 of the in-vehicle navigation device 1 detects the position of the host vehicle (the lane in which the vehicle is traveling) has been described above. If the process described in this embodiment is performed, the position of the host vehicle can be detected with higher accuracy, as in the first embodiment and the second embodiment.
- FIG. 10 is a diagram illustrating a vehicle position detection system 2 according to the fourth embodiment.
- the device mounted on the vehicle executes the process related to the detection of the current location of the host vehicle.
- the processing is executed by the control server 3 that can communicate with the device mounted on the vehicle via the network N.
- the control server 3 functions as an “information processing apparatus”.
- the vehicle-mounted device 1 b As shown in FIG. 10, the vehicle-mounted device 1 b according to the present embodiment is mounted on the vehicle.
- the in-vehicle camera 20 is connected to the in-vehicle device 1b according to the present embodiment.
- the in-vehicle device 1b is communicably connected to the control server 3 via a network N configured including the Internet.
- the in-vehicle device 1b may have a function of accessing the network N so that the in-vehicle device 1b directly accesses the network N.
- a terminal having a function of accessing the in-vehicle device 1b and the network N (for example, a vehicle occupant It may be configured such that the in-vehicle device 1b accesses the network N via a terminal by connecting to a mobile phone) possessed by short-range wireless communication, wired communication, or other communication method.
- the in-vehicle device 1b has a function of transmitting captured image data input from the in-vehicle camera 20 to the in-vehicle navigation device 1 via the network N.
- the control server 5 includes a CPU, a ROM, a RAM, other peripheral circuits, and the like.
- the server control unit 6 controls each unit of the control server 5 by cooperation of hardware and software such as reading and executing a program. Is provided.
- the server control unit 6 functions as a “control unit”.
- the server control unit 6 receives the captured image data from the in-vehicle device 1b, performs a process corresponding to the flowchart of FIG. 3, FIG. 6, or FIG. Detect the relative position of the vehicle.
- the control server 5 stores the information necessary for the processing related to the detection (for example, the information corresponding to the estimated current position described above or the information included in the road information data 1211), or as necessary. Obtained from the in-vehicle device 1b at an appropriate timing.
- the server control unit 6 appropriately notifies the in-vehicle device 1b of the detection result of information indicating the relative position of the host vehicle with respect to the detected road sign.
- the in-vehicle device 1b executes a corresponding process based on the notification from the control server 5.
- the vehicle-mounted apparatus 1b mounted in the vehicle can acquire the relative position of the own vehicle with respect to a road sign, and acquired relative position.
- the corresponding processing can be executed based on the above.
- the in-vehicle navigation device 1 and the control server 5 detect the relative position of the host vehicle with respect to a road sign as an object.
- the object is not limited to a road sign and may be anything as long as it can be photographed by the in-vehicle camera 20.
- the object may be a signal, a building, a signboard, or the like.
- the road sign has a characteristic that the position where it is provided is determined to some extent in relation to the road, a characteristic that it is managed by the map data 121, and a characteristic that the types are limited and there is a standard of shape for each type. Yes, it is suitable as an object.
- FIGS. 1 and 10 are schematic diagrams showing the functional configurations of the in-vehicle navigation device 1 and the control server 5 classified according to main processing contents in order to facilitate understanding of the present invention.
- the configurations of these devices can be classified into more components depending on the processing contents. Moreover, it can also classify
- the present invention is not limited by the way of dividing the processing unit or the name.
- the processing of each device can be divided into more processing units according to the processing content. Moreover, it can also divide
- the in-vehicle navigation device 1 is configured to acquire captured image data from the in-vehicle camera 20 that is an external device, but the in-vehicle navigation device 1 may have a configuration having an imaging function.
- SYMBOLS 1 Car-mounted navigation apparatus (information processing apparatus), 5 ... Control server (information processing apparatus), 6 ... Server control part (control part), 10 ... Control part, 12 ... Memory
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
車両の道路上の位置を、より高い精度で算出する。 車載ナビゲーション装置1は、車両の外を撮影して得られた撮影画像データを取得し、撮影画像データに、道路標識の画像データである対象画像データが含まれる場合、対象画像データに基づいて、道路標識に対する車両の相対位置を算出し、算出した相対位置に基づいて、車両の道路上の位置を検出する制御部10を備える。
Description
本発明は、車両の位置を検出する技術に関する。
本技術分野の背景技術として、特許文献1には、「推測航法を利用して車両の現在地を検出して、車両の現在地情報を管理し、前記推測航法を利用して左右方向の移動量を積算し、その移動量と道路のレーン幅とを比較して現在地情報のレーン移動を検出することにより、現在地検出手段により推測航法を利用して車両の現在地を検出し、レーン移動検出手段によりレーン移動を検出して、レーン位置を含む車両の現在地情報を現在地情報管理手段により管理する。」と記載されている。
しかしながら、特許文献1に記載された技術は、積算した車両の移動量を利用して車両の現在位置を検出するため、車両の走行距離が長くなると、検出した車両の位置と、実際の車両の位置との誤差が大きくなるという問題がある。
本発明は、上述した事情に鑑みてなされたものであり、車両の道路上の位置を、より高い精度で算出することを目的とする。
本発明は、上述した事情に鑑みてなされたものであり、車両の道路上の位置を、より高い精度で算出することを目的とする。
上記目的を達成するために、本発明は、車両に搭載された情報処理装置において、車両の外を撮影して得られた撮影画像データを取得し、前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、算出した前記相対位置に基づいて、前記車両の道路上の位置を検出する制御部を備えることを特徴とする。
また、本発明の情報処理装置は、前記制御部は、記憶された前記対象画像データに対応する画像データと前記撮影画像データとの比較結果に基づいて、前記撮影画像データに前記対象画像データが含まれるか否かを判別することを特徴とする。
また、本発明の情報処理装置は、前記対象物の位置を示す情報、及び、前記対象物と道路との関係を示す情報を含む道路情報を記憶する記憶部を備え、前記制御部は、算出した前記相対位置、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする。
また、本発明の情報処理装置は、前記制御部は、前記相対位置として、前記車両の進行方向に交わる方向における前記車両と前記対象物との離間距離である直角方向離間距離を算出し、算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする。
また、本発明の情報処理装置は、前記道路情報は、道路が有する車線の幅に関する情報、及び、前記対象物と道路との離間距離に関する情報を含み、前記制御部は、算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両が走行している車線を特定することを特徴とする。
また、本発明の情報処理装置は、前記対象物は、道路標識を含むことを特徴とする。
また、本発明の情報処理装置は、撮影機能を有する撮影装置が接続可能なインターフェースを備え、前記制御部は、前記インターフェースを介して前記撮影装置から前記撮影画像データを受信して取得することを特徴とする。
また、上記目的を達成するために、本発明の車両位置検出方法は、制御部により、車両の外を撮影して得られた撮影画像データを取得し、前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、算出した前記相対位置に基づいて、前記車両の道路上の位置を検出することを特徴とする。
また、本発明の車両位置検出方法は、前記対象画像データに対応する画像データを記憶し、記憶した前記対象画像データに対応する画像データと前記撮影画像データとの比較結果に基づいて、前記撮影画像データに前記対象画像データが含まれるか否かを判別することを特徴とする。
また、本発明の車両位置検出方法は、算出した前記相対位置、及び、前記対象物の位置を示す情報及び前記対象物と道路との関係を示す情報を含む道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする。
また、本発明の車両位置検出方法は、前記相対位置として、前記車両の進行方向に交わる方向における前記車両と前記対象物との離間距離である直角方向離間距離を算出し、算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする。
また、本発明の車両位置検出方法は、算出した前記直角方向離間距離、及び、道路が有する車線の幅に関する情報及び前記対象物と道路との離間距離に関する情報を含む前記道路情報に基づいて、前記車両が走行している車線を特定することを特徴とする。
また、上記目的を達成するために、本発明は、車両に搭載された車載装置とネットワークを介して通信可能に接続された情報処理装置において、前記車載装置から、前記車両の外を撮影して得られた撮影画像データを取得し、前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、算出した前記相対位置に基づいて、前記車両の道路上の位置を検出し、検出結果を前記車載装置に通知する制御部を備えることを特徴とする。
本発明によれば、車両の道路上の位置を、より高い精度で算出できる。
以下、図面を参照して本発明の実施形態について説明する。
<第1実施形態>
図1は、第1実施形態に係る車載ナビゲーション装置1(情報処理装置)の機能的構成を示すブロック図である。
図1は、第1実施形態に係る車載ナビゲーション装置1(情報処理装置)の機能的構成を示すブロック図である。
車載ナビゲーション装置1は、車両に搭載される装置であり、車両の現在位置を検出する自車位置検出を行う機能、地図を表示して、表示した地図上に車両の現在位置を表示する地図表示を行う機能、目的地までの経路を探索する経路探索を行う機能、及び、地図を表示して、地図上に目的地までの経路を表示し、目的地までの経路を案内する経路案内を行う機能を備える。
以下、車載ナビゲーション装置1が搭載された車両を「自車両」と表現する。
図1に示すように、車載ナビゲーション装置1は、制御部10と、タッチパネル11と、記憶部12と、GPSユニット13と、相対方位検出ユニット14と、インターフェース15と、車速取得部16と、を備える。
制御部10は、CPUや、ROM、RAM、その他の周辺回路等を備え、車載ナビゲーション装置1の各部を制御する。制御部10は、例えば、CPUが、ROMに記憶された制御プログラムを読み出して実行する等、ハードウェアとソフトウェアとの協働により、車載ナビゲーション装置1の各部を制御する。
タッチパネル11は、表示パネル111と、タッチセンサー112とを備える。表示パネル111は、液晶表示パネルや、有機ELパネル等の表示装置を備え、制御部10の制御に従って、各種画像を表示する。タッチセンサー112は、表示パネル111に重ねて配置され、ユーザのタッチ操作を検出し、タッチ操作を示す信号を制御部10に出力する。制御部10は、タッチセンサー112から入力された信号に基づいて、ユーザのタッチ操作に対応する処理を実行する。
記憶部12は、不揮発性メモリーを備え、各種データを記憶する。
記憶部12は、地図データ121を記憶する。
地図データ121は、パーセルデータを含む。パーセルデータは、上述した地図表示や、経路案内で利用されるデータであり、道路の形状の描画に係る道路描画データや、地形等の背景の描画に係る背景描画データ、行政区画等の文字列の描画に係る文字列描画データ等の地図の表示に係る描画データを含む。なお、前記道路描画データは、交差点等の道路網における結線点に対応するノードに関する情報を有するノード情報や、ノードとノードとの間に形成される道路に対応するリンクに関する情報を有するリンク情報、経路案内のために必要な情報をさらに含んでいる。
また、地図データ121は、リージョンデータを含む。リージョンデータは、上述した経路探索で利用されるデータであり、交差点等の道路網における結線点に対応するノードに関する情報を有するノード情報や、ノードとノードとの間に形成される道路に対応するリンクに関する情報を有するリンク情報等、経路探索のために必要な情報を含む。
また、地図データ121は、道路情報データ1211を含む。道路情報データ1211については、後述する。
地図データ121は、パーセルデータを含む。パーセルデータは、上述した地図表示や、経路案内で利用されるデータであり、道路の形状の描画に係る道路描画データや、地形等の背景の描画に係る背景描画データ、行政区画等の文字列の描画に係る文字列描画データ等の地図の表示に係る描画データを含む。なお、前記道路描画データは、交差点等の道路網における結線点に対応するノードに関する情報を有するノード情報や、ノードとノードとの間に形成される道路に対応するリンクに関する情報を有するリンク情報、経路案内のために必要な情報をさらに含んでいる。
また、地図データ121は、リージョンデータを含む。リージョンデータは、上述した経路探索で利用されるデータであり、交差点等の道路網における結線点に対応するノードに関する情報を有するノード情報や、ノードとノードとの間に形成される道路に対応するリンクに関する情報を有するリンク情報等、経路探索のために必要な情報を含む。
また、地図データ121は、道路情報データ1211を含む。道路情報データ1211については、後述する。
GPSユニット13は、図示せぬGPSアンテナを介してGPS衛星からのGPS電波を受信し、GPS電波に重畳されたGPS信号から、自車両の現在位置と進行方向とを演算により取得する。GPSユニット13は、取得結果を制御部10に出力する。
相対方位検出ユニット14は、ジャイロセンサと、加速度センサとを備える。ジャイロセンサは、例えば振動ジャイロにより構成され、自車両の相対的な方位(例えば、ヨー軸方向の旋回量)を検出する。加速度センサは、自車両に作用する加速度(例えば、進行方向に対する自車両の傾き)を検出する。相対方位検出ユニット14は、ジャイロセンサ、及び、加速度センサの検出結果を制御部10に出力する。
車速取得部16は、例えば、車速パルスを検出するセンサと接続され、当該センサから入力される車速パルスに基づいて自車両の車速を検出し、また例えば、ECU(Engine Contorol Unit)と通信して、ECUから車速に関する情報を取得して自車両の車速を検出する。車速取得部16は、検出結果を制御部10に出力する。制御部10は、車速取得部16からの入力に基づいて、自車両の車速を検出する。
制御部10は、自車位置検出を行う場合、GPSユニット13及び相対方位検出ユニット14からの入力、車速取得部16からの入力に基づいて検出した自車両の車速等の自車両の状態、及び、地図データ121に基づいて自車両の現在位置を推定し、適宜、後述する方法で推定した現在位置を補正して、自車両の現在位置を検出する。
また、制御部10は、地図表示を行う場合、検出した自車両の現在位置を、タッチパネル11に表示した地図上に表示する。
また、制御部10は、経路探索を行う場合、地図データ121に基づいて、検出した現在位置から、ユーザに設定された目的地に至る経路を探索する。
また、制御部10は、経路案内を行う場合、目的地までの経路を地図上に示しつつ、現出した自車両の現在位置を地図上に表示し、経路を案内する。
また、制御部10は、経路探索を行う場合、地図データ121に基づいて、検出した現在位置から、ユーザに設定された目的地に至る経路を探索する。
また、制御部10は、経路案内を行う場合、目的地までの経路を地図上に示しつつ、現出した自車両の現在位置を地図上に表示し、経路を案内する。
インターフェース15は、外部装置が接続され、制御部10の制御に従って、所定のプロトコルに従って、接続された外部装置と通信する。本実施形態では、インターフェース15に外部装置として車載カメラ20(撮影装置)が接続される。
車載カメラ20は、自車両の前方を撮影する2つの撮影部を有するステレオカメラである。2つの撮影部のレンズ機構は、自車両のフロントガラスの内側で、自車両の前後方向に直交する方向である左右方向に離間して配置されている。2つの撮影部のそれぞれは、所定の周期で同期をとって撮影を実行する。車載カメラ20は、2つの撮影部の撮影結果に基づいて2つの撮影画像データを生成し、生成した2つの撮影画像データを、インターフェース15を介して制御部10に出力する。
ところで、上述したように、本実施形態に係る車載ナビゲーション装置1は、自車両の現在位置を検出する自車位置検出を行う機能を有する。
そして、自車位置検出について、走行中の道路における自車両の現在位置をできるだけ高い精度で検出したいとするニーズがある。特に、自車位置検出について、走行中の道路が複数の車線を有する場合において、複数の車線のうち、どの車線を自車両が走行しているかをできるだけ高い精度で検出したいとするニーズがある。自車両が走行している車線(以下、「走行車線」という。)を高い精度で検出することにより、地図表示に際し、ユーザに、自車両が走行中の車線をより正確に報知でき、また、経路案内に際し、探索した経路をスムーズに走行するための車線の変更等を的確に報知でき、ユーザの利便性が向上する。
以上を踏まえ、車載ナビゲーション装置1は、以下の方法で自車両が走行している車線を検出する。
そして、自車位置検出について、走行中の道路における自車両の現在位置をできるだけ高い精度で検出したいとするニーズがある。特に、自車位置検出について、走行中の道路が複数の車線を有する場合において、複数の車線のうち、どの車線を自車両が走行しているかをできるだけ高い精度で検出したいとするニーズがある。自車両が走行している車線(以下、「走行車線」という。)を高い精度で検出することにより、地図表示に際し、ユーザに、自車両が走行中の車線をより正確に報知でき、また、経路案内に際し、探索した経路をスムーズに走行するための車線の変更等を的確に報知でき、ユーザの利便性が向上する。
以上を踏まえ、車載ナビゲーション装置1は、以下の方法で自車両が走行している車線を検出する。
図2は、自車両が所定の走行レーンを走行している場合において、当該走行レーンと、自車両の現在位置である位置P1、及び、後述する処理で自車両の位置の検出に利用する道路標識(以下、単に「道路標識」という。)の位置である位置P2との関係の一例を示す図である。
また、図3は、自車両が走行している車線を検出するときの車載ナビゲーション装置1の動作を示すフローチャートである。
また、図3は、自車両が走行している車線を検出するときの車載ナビゲーション装置1の動作を示すフローチャートである。
以下で図3のフローチャートを用いて説明する処理は、走行レーンの形状が図2に例示した走行レーンに準じた形状であり、また、走行レーンと、自車両の現在位置、及び、道路標識の位置との関係が、図2に例示する関係に準じたものであることを前提とする。
すなわち、走行レーンは、複数の車線(図2の例では、第1車線S1~第5車線S5の5つの車線)を有することを前提とする。
また、走行レーンは、自車両の現在位置(図2の例では、位置P1)から、進行方向に向かって、少なくとも道路標識の位置(図2の例では、位置P2)までは屈曲することなく直線的に延びており、車線の数に変化がなく、各車線の幅に略変化がないことを前提とする。
また、走行レーンに含まれる車線のうち、進行方向に向かって最も左側の車線(図2の例では、第1車線S1)の左側には、当該車線に沿って路側帯(図2の例では、路側帯R1)が延在することを前提とする。
また、道路標識の位置(図2の例では、位置P2)は、自車両の位置(図2の例では、位置P1)から進行方向に向かって左斜め前方であって、自車両に搭載された車載カメラ20により撮影可能な位置であることを前提とする。
すなわち、走行レーンは、複数の車線(図2の例では、第1車線S1~第5車線S5の5つの車線)を有することを前提とする。
また、走行レーンは、自車両の現在位置(図2の例では、位置P1)から、進行方向に向かって、少なくとも道路標識の位置(図2の例では、位置P2)までは屈曲することなく直線的に延びており、車線の数に変化がなく、各車線の幅に略変化がないことを前提とする。
また、走行レーンに含まれる車線のうち、進行方向に向かって最も左側の車線(図2の例では、第1車線S1)の左側には、当該車線に沿って路側帯(図2の例では、路側帯R1)が延在することを前提とする。
また、道路標識の位置(図2の例では、位置P2)は、自車両の位置(図2の例では、位置P1)から進行方向に向かって左斜め前方であって、自車両に搭載された車載カメラ20により撮影可能な位置であることを前提とする。
以下の説明では、自車両の進行方向に交わる方向を「直角方向」(図2の例では、直角方向Y1)という。
図3に示すように、車載ナビゲーション装置1の制御部10は、車載カメラ20が出力した撮影画像データを取得する(ステップSA1)。
上述したように、車載カメラ20は、2つの撮影部で同期をとって所定の周期で自車両の前方を撮影し、撮影結果に基づく撮影画像データを制御部10に出力する。従って、制御部10は、ステップSA1の処理を車載カメラ20が撮影画像データを出力する周期に対応する周期で実行し、ステップSA1の処理の実行(撮影画像データの取得)をトリガーとして、ステップSA2以下の処理を実行する。
上述したように、車載カメラ20は、2つの撮影部で同期をとって所定の周期で自車両の前方を撮影し、撮影結果に基づく撮影画像データを制御部10に出力する。従って、制御部10は、ステップSA1の処理を車載カメラ20が撮影画像データを出力する周期に対応する周期で実行し、ステップSA1の処理の実行(撮影画像データの取得)をトリガーとして、ステップSA2以下の処理を実行する。
次いで、制御部10は、ステップSA1で取得した撮影画像データを分析し、撮影画像データに、最高速度(制限速度、規制速度)を示す道路標識(以下、「最高速度道路標識」という。)の画像の画像データである対象画像データが含まれているか否かを判別する(ステップSA2)。以下、ステップSA2の処理について詳述する。
なお、制御部10は、2台のステレオカメラから同期をとって入力される撮影画像データのうち、いずれか一方の撮影画像データを用いて、ステップSA2の処理を実行する。
なお、制御部10は、2台のステレオカメラから同期をとって入力される撮影画像データのうち、いずれか一方の撮影画像データを用いて、ステップSA2の処理を実行する。
図4は、撮影画像データの一例を、説明に適した態様で模式的に示す図である。
本実施形態において、撮影画像データは、色に関する情報(例えば、RGBの各色の色成分を所定階調の階調値で表す情報)を有するドットが、所定の解像度に対応してドットマトリックス状に配置された画像データである。
本実施形態において、撮影画像データは、色に関する情報(例えば、RGBの各色の色成分を所定階調の階調値で表す情報)を有するドットが、所定の解像度に対応してドットマトリックス状に配置された画像データである。
ここで、地図データ121は、最高速度ごとの最高速度道路標識のそれぞれについて、パターンマッチングでテンプレートとして用いる画像データ(以下、「テンプレート画像データ」という。)を有する。テンプレート画像データは、「記憶された対象画像データに対応する画像データ」に相当する。ステップSA2において、制御部10は、地図データ121が有するテンプレート画像データを用いたパターンマッチングを行って、撮影画像データに、対象画像データが含まれているか否かを判別する。
図4の例では、領域A1は、最高速度が50km/hであることを示す最高速度道路標識の画像の画像データであり、当該領域A1に対応する画像データが、対象画像データに相当する。従って、制御部10は、ステップSA1において図4の撮影画像データを取得した場合、ステップSA2において最高速度が50km/hであることを示す最高速度道路標識の画像のテンプレートに係るテンプレート画像データを用いたパターンマッチングにより、撮影画像データに対象画像データが含まれていると判別する。
図4の例では、領域A1は、最高速度が50km/hであることを示す最高速度道路標識の画像の画像データであり、当該領域A1に対応する画像データが、対象画像データに相当する。従って、制御部10は、ステップSA1において図4の撮影画像データを取得した場合、ステップSA2において最高速度が50km/hであることを示す最高速度道路標識の画像のテンプレートに係るテンプレート画像データを用いたパターンマッチングにより、撮影画像データに対象画像データが含まれていると判別する。
なお、ステップSA2において、撮影画像データに対象画像データが含まれているか否かの判別の精度、及び、後述する標識車両間距離の算出の精度を向上するため、制御部10は、撮影画像データに含まれていた対象画像データのサイズが所定の閾値以上の場合に、撮影画像データに対象画像データが含まれると判別するようにしてもよい。
なお、撮影画像データに、対象画像データが含まれているか否かを判別する方法は、パターンマッチングを用いた方法に限らず、どのような方法であってもよい。
ステップSA2において、撮影画像データに、対象画像データが含まれていないと判別した場合(ステップSA2:NO)、制御部10は、処理を終了する。
ステップSA2において、撮影画像データに対象画像データが含まれていると判別した場合(ステップSA2:YES)、制御部10は、対象画像データに基づいて、撮影された道路標識(最高速度道路標識)を認識する(ステップSA3)。
具体的には、ステップSA3において、制御部10は、対象画像データを分析し、対象画像データに対応する道路標識の種類を取得する。例えば、制御部10は、パターンマッチング等の方法により、対象画像データに対応する道路標識に含まれる文字列や、図形を特定する。ここで、地図データ121は、道路標識の種類ごとに、道路標識に含まれる文字列や図形と、道路標識の種類とを対応付ける情報を有する。制御部10は、当該情報に基づいて、特定した文字列や、図形に対応する道路標識の種類を取得する。
なお、道路標識の種類を特定する方法は、道路標識に含まれる文字列や、図形に基づく方法に限らず、どのような方法であってもよい。例えば、道路標識の種類を特定する方法は、道路標識の形状や、色等を反映して道路標識の種類を特定する方法であってもよい。
なお、道路標識の種類を特定する方法は、道路標識に含まれる文字列や、図形に基づく方法に限らず、どのような方法であってもよい。例えば、道路標識の種類を特定する方法は、道路標識の形状や、色等を反映して道路標識の種類を特定する方法であってもよい。
続くステップSA4で、制御部10は、対象画像データに対応する道路標識と、自車両との離間距離(以下、「標識車両間距離」という。図2の例では、標識車両間距離A)を算出する。
例えば、制御部10は、車載カメラ20から入力された2つの撮影部の2つの撮影画像データにおける対象画像データの位置の差(視差)を利用した既存の画像処理により、標識車両間距離を算出する。
例えば、制御部10は、車載カメラ20から入力された2つの撮影部の2つの撮影画像データにおける対象画像データの位置の差(視差)を利用した既存の画像処理により、標識車両間距離を算出する。
なお、標識車両間距離の算出方法は、例示した方法に限らず、どのような方法であってもよい。例えば、制御部10は、撮影画像データにおける対象画像データのサイズに基づく所定の手段により、標識車両間距離を算出してもよい。
続くステップSA5で、制御部10は、自車両の進行方向に向かって延びる仮想直線(図2の例では、仮想直線KT1)と、自車両と道路標識とを結ぶ仮想直線(図2の例では、仮想直線KT2)との角度(以下、「標識車両間角度」という。図2の例では、角度θ)を算出する。
例えば、制御部10は、ステップSA4で算出した標識車両間距離と、車載カメラ20から入力された2つの撮影部の2つの撮影画像データにおける対象画像データの位置と、撮影画像データにおける車線の境界を示す白線の向きとに基づく既存の画像処理により、標識車両間角度を算出する。
なお、標識車両間角度の算出方法は、例示した方法に限らず、どのような方法であってもよい。
例えば、制御部10は、ステップSA4で算出した標識車両間距離と、車載カメラ20から入力された2つの撮影部の2つの撮影画像データにおける対象画像データの位置と、撮影画像データにおける車線の境界を示す白線の向きとに基づく既存の画像処理により、標識車両間角度を算出する。
なお、標識車両間角度の算出方法は、例示した方法に限らず、どのような方法であってもよい。
続くステップSA6で、制御部10は、自車両の現在位置(図2の例では、位置P1)と、道路標識の位置(図2の例では、位置P2)との、直角方向(図4の例では、直角方向Y1)における距離(以下、「直角方向離間距離」という。図4の例では、直角方向離間距離B。)を算出する。以下、ステップSA6の処理について詳述する。
制御部10は、ステップSA4で算出した標識車両間距離、及び、ステップSA5で算出した標識車両間角度に基づいて、以下の数式M1によって、直角方向離間距離を算出する。
(式M1):直角方向離間距離=標識車両間距離・sin(標識車両間角度)
制御部10は、ステップSA4で算出した標識車両間距離、及び、ステップSA5で算出した標識車両間角度に基づいて、以下の数式M1によって、直角方向離間距離を算出する。
(式M1):直角方向離間距離=標識車両間距離・sin(標識車両間角度)
次いで、制御部10は、GPSユニット13、相対方位検出ユニット14、及び、車速取得部16からの入力に基づいて、自車両の現在位置を検出する(ステップSA7)。
以下の説明では、GPSユニット13、及び、相対方位検出ユニット14からの入力に基づいて検出される自車両の現在位置を「推定現在位置」と表現する。推定現在位置は、GPSユニット13からの入力を利用して算出されるため、GPSに由来する誤差が生じる場合があり、推定現在位置に基づいて、走行車線を検出するのは適切ではない。また、推定現在位置は、自車両の現在位置を、経度、及び、緯度によって表すものである。
以下の説明では、GPSユニット13、及び、相対方位検出ユニット14からの入力に基づいて検出される自車両の現在位置を「推定現在位置」と表現する。推定現在位置は、GPSユニット13からの入力を利用して算出されるため、GPSに由来する誤差が生じる場合があり、推定現在位置に基づいて、走行車線を検出するのは適切ではない。また、推定現在位置は、自車両の現在位置を、経度、及び、緯度によって表すものである。
次いで、制御部10は、道路情報データ1211を参照する(ステップSA8)。
道路情報データ1211は、地図データ121に基づく地図に表示される道路標識(地図データ121で管理する道路標識)のそれぞれについて、レコードを有するデータベースである。
道路情報データ1211は、地図データ121に基づく地図に表示される道路標識(地図データ121で管理する道路標識)のそれぞれについて、レコードを有するデータベースである。
図5は、道路情報データ1211の1件のレコードのデータ構造を示す図である。
図5に示すように、道路情報データ1211の1件のレコードは、標識情報J1と、対応道路情報J2とを有する。
図5に示すように、道路情報データ1211の1件のレコードは、標識情報J1と、対応道路情報J2とを有する。
標識情報J1は、道路標識に関する情報であり、道路標識を一意に識別するための標識IDJ11と、道路標識の種類を示す標識種類情報J12と、道路標識の位置(経度、及び、緯度で表される位置)を示す標識位置情報J13と有する。
対応道路情報J2は、道路標識が設けられた道路に関する情報である。なお、道路標識が設けられた道路とは、当該道路標識が示す規則に従った走行が求められる片側の道路を意味する。
対応道路情報J2は、道路のリンクIDJ21(上述したリージョンデータ、又は、パーセルデータのリンク情報において、リンクごとに割り振られた識別情報)と、道路の車線数を示す車線数情報J22と、道路標識が設けられた道路の車線のうち進行方向に向かって最も左側の車線の左端と、道路標識の位置との離間距離(以下、「標識道路離間距離」という。)を示す道路離間情報J23と、を有する。また、対応道路情報J2は、道路が有するn(ただし、nは、「1」以上の整数)個の車線ごとに、車線の幅を示す第1車線幅情報J241~第n車線幅情報J24nを有する。以下の説明では、n個の車線について、進行方向に向かって最も左側の車線から順番に、第1車線、第2車線、・・・、第n車線と表現する。
対応道路情報J2は、道路のリンクIDJ21(上述したリージョンデータ、又は、パーセルデータのリンク情報において、リンクごとに割り振られた識別情報)と、道路の車線数を示す車線数情報J22と、道路標識が設けられた道路の車線のうち進行方向に向かって最も左側の車線の左端と、道路標識の位置との離間距離(以下、「標識道路離間距離」という。)を示す道路離間情報J23と、を有する。また、対応道路情報J2は、道路が有するn(ただし、nは、「1」以上の整数)個の車線ごとに、車線の幅を示す第1車線幅情報J241~第n車線幅情報J24nを有する。以下の説明では、n個の車線について、進行方向に向かって最も左側の車線から順番に、第1車線、第2車線、・・・、第n車線と表現する。
道路情報データ1211の各レコードが有する情報は、「道路情報」に相当する。
また、道路離間情報J23は、「対象物と道路との離間距離に関する情報」に相当する。
また、道路離間情報J23は、「対象物と道路との離間距離に関する情報」に相当する。
続くステップSA9で、制御部10は、道路情報データ1211が有するレコードの中から、対象画像データに対応する道路標識のレコードを特定する。以下、ステップSA9の処理について詳述する。
ステップSA9において、制御部10は、道路情報データ1211が有する各レコードのうち、道路情報データ1211の標識位置情報J13が示す位置と、ステップSA7で検出した推定現在位置とが所定の関係にあるレコードを抽出する。
道路情報データ1211の標識位置情報J13が示す位置と、ステップSA7で検出した推定現在位置とが所定の関係にあるとは、標識位置情報J13が示す位置が、推定現在位置を起点とした車載カメラ20の撮影範囲内にあることをいう。
抽出したレコードが1つの場合、制御部10は、抽出されたレコードを、対象画像データに対応する道路標識のレコードとして、特定する。
一方、抽出されるレコードが複数ある場合が生じ得る。この場合、制御部10は、抽出した複数のレコードのうち、標識種類情報J12が示す道路標識の種類が、ステップSA3で取得した対象画像データに対応する道路標識の種類と一致するレコードを、対象画像データに対応する道路標識のレコードとして、特定する。
ここで、通常、同一の種類の道路標識は、一定以上の距離、離間して配置される。従って、上記方法で、対応するレコードを特定することにより、対象画像データに対応する道路標識のレコードを、適切に、特定できる。
道路情報データ1211の標識位置情報J13が示す位置と、ステップSA7で検出した推定現在位置とが所定の関係にあるとは、標識位置情報J13が示す位置が、推定現在位置を起点とした車載カメラ20の撮影範囲内にあることをいう。
抽出したレコードが1つの場合、制御部10は、抽出されたレコードを、対象画像データに対応する道路標識のレコードとして、特定する。
一方、抽出されるレコードが複数ある場合が生じ得る。この場合、制御部10は、抽出した複数のレコードのうち、標識種類情報J12が示す道路標識の種類が、ステップSA3で取得した対象画像データに対応する道路標識の種類と一致するレコードを、対象画像データに対応する道路標識のレコードとして、特定する。
ここで、通常、同一の種類の道路標識は、一定以上の距離、離間して配置される。従って、上記方法で、対応するレコードを特定することにより、対象画像データに対応する道路標識のレコードを、適切に、特定できる。
続くステップSA10において、制御部10は、ステップSA9で特定したレコードに基づいて、道路離間情報J23、及び、第1車線幅情報J241~第n車線幅情報J24nを取得する。
次いで、制御部10は、ステップSA6で算出した直角方向離間距離と、ステップSA10で取得した道路離間情報J23、及び、第1車線幅情報J241~第n車線幅情報J24nに基づいて、自車両が走行している車線(走行車線)を特定する(ステップSA11)。以下、ステップSA11の処理について詳述する。
ここで、自車両が走行している車線は、直角方向離間距離と、標識道路離間距離、及び、道路が有する各車線の幅との関係により、特定可能である。
すなわち、直角方向離間距離と、標識道路離間距離と、道路(走行レーン)が有する第1車線~第n車線の幅とは、以下の関係にある。「標識道路離間距離+第1車線の幅+・・・+第(m-1)車線の幅<直角方向離間距離<標識道路離間距離+第1車線の幅+・・・+第m車線の幅」(ただし、mは、「1」以上の整数。)。この場合、自車両が走行している車線(走行車線)は、第m車線である。
例えば、図2の場合、直角方向離間距離Cと、標識道路離間距離H1、及び、道路(走行レーン)が有する第1車線S1~第5車線S5の幅L1~幅L5とは、以下の関係にある。「標識道路離間距離H1+幅L1+幅L2<直角方向離間距離C<標識道路離間距離H1+幅L1+幅L2+幅L3」。そして、この場合、自車両が走行している車線は、第3車線S3である。
以上を踏まえ、ステップSA11において、制御部10は、直角方向離間距離と、標識道路離間距離、及び、道路が有する各車線の幅との関係に基づいて、自車両が走行している車線(走行車線)を特定する。
すなわち、直角方向離間距離と、標識道路離間距離と、道路(走行レーン)が有する第1車線~第n車線の幅とは、以下の関係にある。「標識道路離間距離+第1車線の幅+・・・+第(m-1)車線の幅<直角方向離間距離<標識道路離間距離+第1車線の幅+・・・+第m車線の幅」(ただし、mは、「1」以上の整数。)。この場合、自車両が走行している車線(走行車線)は、第m車線である。
例えば、図2の場合、直角方向離間距離Cと、標識道路離間距離H1、及び、道路(走行レーン)が有する第1車線S1~第5車線S5の幅L1~幅L5とは、以下の関係にある。「標識道路離間距離H1+幅L1+幅L2<直角方向離間距離C<標識道路離間距離H1+幅L1+幅L2+幅L3」。そして、この場合、自車両が走行している車線は、第3車線S3である。
以上を踏まえ、ステップSA11において、制御部10は、直角方向離間距離と、標識道路離間距離、及び、道路が有する各車線の幅との関係に基づいて、自車両が走行している車線(走行車線)を特定する。
以上、自車両が走行している車線を検出(特定)するときの車載ナビゲーション装置1の動作を説明した。
ここで、上記の説明では、制御部10は、標識車両間角度、標識車両間距離、及び、直角方向離間距離を算出した。
そして、標識車両間角度、及び、標識車両間距離が定まれば、道路標識に対する自車両の位置が定まるため、標識車両間角度、及び、標識車両間距離は、「道路標識(対象物)に対する自車両(車両)の相対位置」に相当する。
同様に、直角方向離間距離が定まれば、道路標識に対する直角方向における自車両の位置が定まるため、直角方向離間距離は、「道路標識(対象物)に対する自車両(車両)の相対位置」に相当する。
ここで、上記の説明では、制御部10は、標識車両間角度、標識車両間距離、及び、直角方向離間距離を算出した。
そして、標識車両間角度、及び、標識車両間距離が定まれば、道路標識に対する自車両の位置が定まるため、標識車両間角度、及び、標識車両間距離は、「道路標識(対象物)に対する自車両(車両)の相対位置」に相当する。
同様に、直角方向離間距離が定まれば、道路標識に対する直角方向における自車両の位置が定まるため、直角方向離間距離は、「道路標識(対象物)に対する自車両(車両)の相対位置」に相当する。
また、上述した実施形態では、制御部10は、算出した標識車両間角度、標識車両間距離、及び、直角方向離間距離を用いて、自車両が走行する車線を検出していた。しかしながら、これら相対位置は、自車両の検出に際し、他の方法で使用可能である。
例えば、制御部10は、標識車両間角度、及び、標識車両間距離に基づいて、道路標識に対する自車両の相対位置を検出できる。従って、制御部10は、道路標識の地図上の位置を取得することにより、自車両の地図上の位置を検出できる。そして、標識車両間角度、及び、標識車両間距離に基づいて検出した自車両の地図上の位置により、例えば、GPSユニット13等からの入力により検出した推定現在位置を補正すれば、より高い精度で、自車両の位置を検出できる。
また、自動運転システム(完全な自動運転に係るシステムだけでなく、所定の場合に自動運転を支援するシステムを含む。)では、自車両の位置を高い精度で検出することが求められるが、自車両の位置の検出に際し、算出した標識車両間角度、標識車両間距離、及び、直角方向離間距離を用いることにより、より高い精度で、自車両の位置を検出できる。
例えば、制御部10は、標識車両間角度、及び、標識車両間距離に基づいて、道路標識に対する自車両の相対位置を検出できる。従って、制御部10は、道路標識の地図上の位置を取得することにより、自車両の地図上の位置を検出できる。そして、標識車両間角度、及び、標識車両間距離に基づいて検出した自車両の地図上の位置により、例えば、GPSユニット13等からの入力により検出した推定現在位置を補正すれば、より高い精度で、自車両の位置を検出できる。
また、自動運転システム(完全な自動運転に係るシステムだけでなく、所定の場合に自動運転を支援するシステムを含む。)では、自車両の位置を高い精度で検出することが求められるが、自車両の位置の検出に際し、算出した標識車両間角度、標識車両間距離、及び、直角方向離間距離を用いることにより、より高い精度で、自車両の位置を検出できる。
以上説明したように、本実施形態に係る車載ナビゲーション装置1(情報処理装置)は、自車両(車両)の外を撮影して得られた撮影画像データを取得し、撮影画像データに、道路標識(所定の対象物)の画像データである対象画像データが含まれる場合、対象画像データに基づいて、道路標識に対する車両の相対位置(標識車両間角度と標識車両間距離との組み合わせ、又は、直角方向離間距離)を算出し、算出した相対位置に基づいて、車両の道路上の位置を検出する制御部10を備える。
この構成によれば、撮影画像データに含まれる対象画像データに基づいて、道路標識に対する自車両の相対位置を算出し、算出した相対位置に基づいて、自車両の道路上の位置が検出されるため、例えば、積算した車両の移動量を利用して車両の現在位置を検出する場合と比較して、車両の走行距離の長距離化に伴う位置検出の誤差が生じず、高い精度で車両の道路上の位置を算出できる。
この構成によれば、撮影画像データに含まれる対象画像データに基づいて、道路標識に対する自車両の相対位置を算出し、算出した相対位置に基づいて、自車両の道路上の位置が検出されるため、例えば、積算した車両の移動量を利用して車両の現在位置を検出する場合と比較して、車両の走行距離の長距離化に伴う位置検出の誤差が生じず、高い精度で車両の道路上の位置を算出できる。
また、本実施形態では、車載ナビゲーション装置1は、道路標識の位置を示す情報、及び、道路標識と道路との関係を示す情報を含む道路情報を有する道路情報データ1211記憶する記憶部12を備える。
そして、制御部10は、算出した相対位置(標識車両間角度と標識車両間距離との組み合わせ、又は、直角方向離間距離)、及び、記憶部12が記憶する道路情報データ1211に基づいて、自車両の道路上の位置を算出する。
この構成によれば、制御部10は、道路情報データ1211が有する道路情報を利用して、算出した相対位置に基づいて、高い精度で自車両の道路上の位置を検出できる。
そして、制御部10は、算出した相対位置(標識車両間角度と標識車両間距離との組み合わせ、又は、直角方向離間距離)、及び、記憶部12が記憶する道路情報データ1211に基づいて、自車両の道路上の位置を算出する。
この構成によれば、制御部10は、道路情報データ1211が有する道路情報を利用して、算出した相対位置に基づいて、高い精度で自車両の道路上の位置を検出できる。
また、本実施形態では、制御部10は、相対位置として、直角方向(自車両の進行方向に交わる方向)における自車両と道路標識との離間距離である直角方向離間距離を算出し、算出した直角方向離間距離、及び、道路情報データ1211に基づいて、自車両の道路上の位置を算出する。
この構成によれば、制御部10は、道路情報データ1211が有する道路情報を利用して、算出した直角方向離間距離に基づいて、高い精度で自車両の道路上の位置を検出する。
この構成によれば、制御部10は、道路情報データ1211が有する道路情報を利用して、算出した直角方向離間距離に基づいて、高い精度で自車両の道路上の位置を検出する。
また、本実施形態では、道路情報データ1211の道路情報は、第1車線幅情報J241~第n車線幅情報J24n(道路が有する車線の幅に関する情報)、及び、道路離間情報J23(対象物と道路との離間距離に関する情報)を含む。
そして、制御部10は、算出した直角方向離間距離、及び、道路情報データ1211に基づいて、自車両が走行している車線を特定する。
この構成によれば、道路情報データ1211が有する道路情報を利用して、算出した直角方向離間距離に基づいて、高い精度で自車両の道路上の位置を検出する。
そして、制御部10は、算出した直角方向離間距離、及び、道路情報データ1211に基づいて、自車両が走行している車線を特定する。
この構成によれば、道路情報データ1211が有する道路情報を利用して、算出した直角方向離間距離に基づいて、高い精度で自車両の道路上の位置を検出する。
<第2実施形態>
次に、第2実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
また、第2実施形態では、走行レーンの形状、及び、走行レーンと自車両の現在位置及び道路標識の位置との関係について、第1実施形態に係る前提と同様の前提であるものとする。
次に、第2実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
また、第2実施形態では、走行レーンの形状、及び、走行レーンと自車両の現在位置及び道路標識の位置との関係について、第1実施形態に係る前提と同様の前提であるものとする。
図6は、本実施形態に係る車載ナビゲーション装置1が、自車両が走行している車線を検出するときの動作を示すフローチャートである。
図7は、本実施形態に係る車載ナビゲーション装置1の処理を説明するため、走行レーンと、道路標識の位置と、自車両の位置との関係を示す図である。
図7は、本実施形態に係る車載ナビゲーション装置1の処理を説明するため、走行レーンと、道路標識の位置と、自車両の位置との関係を示す図である。
本実施形態に係る車載装置は、第1実施形態で図3のフローチャートを用いて説明した処理のうち、ステップSA4~ステップSA6の処理について、異なる処理を実行する。これを踏まえ、図6のフローチャートにおいて、図3と同一の処理が行われるステップについては、同一の符号を振り、その説明を省略する。そして、以下では、図3のステップSA4~SA6の処理に代えて行われるステップSB1~SB5の処理を説明する。
図6に示すように、ステップSB1において、制御部10は、第1実施形態で説明した方法と同様の方法で、標識車両間角度を算出する。
図7の例では、ステップSB1の処理を実行するタイミング時の自車両の位置は、位置Q1であり、道路標識の位置は、位置Q2であり、ステップSB1において、制御部10は、標識車両間角度として、角度θ1を算出する。
図7の例では、ステップSB1の処理を実行するタイミング時の自車両の位置は、位置Q1であり、道路標識の位置は、位置Q2であり、ステップSB1において、制御部10は、標識車両間角度として、角度θ1を算出する。
次いで、制御部10は、ステップSB1の処理を実行したタイミングから、自車両が、一定距離以上、走行したか否かを監視する(ステップSB2)。ステップSB2における一定距離以上を走行したことの検出は、厳密な検出である必要はなく、例えば、車速と走行時間との関係で一定距離以上を走行した可能性が高い状況であれば、一定距離以上、走行したと判別してよい。
ステップSB1の処理を実行したタイミングから、自車両が、一定距離以上、走行した場合(ステップSB2:YES)、制御部10は、その時点での自車両の現在位置(以下、「第2現在位置」という。図7の例では、位置Q3。)に基づく第2標識車両間角度を算出する(ステップSB3)。
第2標識車両間角度は、自車両の進行方向に向かって延びる仮想直線(図7の例では、仮想直線KT3)と、自車両の第2現在位置(図7の例では、位置Q3)と道路標識の位置(図7の例では、位置Q2)とを結ぶ仮想直線(図2の例では、仮想直線KT4)との角度である。図7の例では、第2標識車両間角度は、角度θ2である。
ステップSB3において、制御部10は、上述した第1実施形態で説明した標識車両間角度を算出する方法と同様の方法で、第2標識車両間角度を算出する。
第2標識車両間角度は、自車両の進行方向に向かって延びる仮想直線(図7の例では、仮想直線KT3)と、自車両の第2現在位置(図7の例では、位置Q3)と道路標識の位置(図7の例では、位置Q2)とを結ぶ仮想直線(図2の例では、仮想直線KT4)との角度である。図7の例では、第2標識車両間角度は、角度θ2である。
ステップSB3において、制御部10は、上述した第1実施形態で説明した標識車両間角度を算出する方法と同様の方法で、第2標識車両間角度を算出する。
次いで、制御部10は、ステップSB1の処理を実行したタイミング時の自車両の位置(図7の例では、位置Q1。)と、ステップSB3の処理を実行したタイミング時の自車両の位置(図7の例では、位置Q3)との距離(以下、「車両走行距離」という。図7の例では、車両走行距離E)を算出する(ステップSB4)。
ステップSB4において、例えば、制御部10は、GPSユニット13、及び、相対方位検出ユニット14からの入力に基づいて、ステップSB1の処理を実行したタイミング時の自車両の推定現在位置と、ステップSB3の処理を実行したタイミング時の自車両の推定現在位置とを検出し、適宜、走行時の車速の状況等を反映した補正を行って、車両走行距離を算出する。また例えば、制御部10は、ステップSB1の処理を実行したタイミング時に車載カメラ20が行った撮影に基づく撮影画像データにおける所定のオブジェクト(道路標識であってもよい。)の画像、及び、ステップSB3の処理を実行したタイミング時に車載カメラ20が行った撮影に基づく撮影画像データにおける当該所定のオブジェクトの画像の変化の態様に基づいて、車両走行距離を算出する。
車両走行距離を算出する方法は、例示した方法に限らず、どのような方法であってもよい。
ステップSB4において、例えば、制御部10は、GPSユニット13、及び、相対方位検出ユニット14からの入力に基づいて、ステップSB1の処理を実行したタイミング時の自車両の推定現在位置と、ステップSB3の処理を実行したタイミング時の自車両の推定現在位置とを検出し、適宜、走行時の車速の状況等を反映した補正を行って、車両走行距離を算出する。また例えば、制御部10は、ステップSB1の処理を実行したタイミング時に車載カメラ20が行った撮影に基づく撮影画像データにおける所定のオブジェクト(道路標識であってもよい。)の画像、及び、ステップSB3の処理を実行したタイミング時に車載カメラ20が行った撮影に基づく撮影画像データにおける当該所定のオブジェクトの画像の変化の態様に基づいて、車両走行距離を算出する。
車両走行距離を算出する方法は、例示した方法に限らず、どのような方法であってもよい。
次いで、制御部10は、ステップSB1で算出した標識車両間角度(図7の例では、角度θ1)、ステップSB3で算出した第2標識車両間角度(図7の例では、角度θ2)、及び、ステップSB4で算出した車両走行距離(図7の例では、車両走行距離E)に基づいて、直角方向離間距離(図7の例では、直角方向離間距離C)を算出する(ステップSB5)。
ここで、第2現在位置(図7の例では、位置Q3)と、第2現在位置を通り、自車両の進行方向に向かって延びる仮想直線(図7の例では、仮想直線KT3)及び道路標識の位置(図7の例では、位置Q2)を通り、直角方向に向かって延びる仮想直線(図7の例では、仮想直線KT5)の交点との距離を「対応距離」(図7の例では、対応距離x。)とすると、以下の式が成り立つ。
(式M2):tan(標識車両間角度)=直角方向離間距離/(車両走行距離+対応距離)
(式M3):tan(第2標識車両間角度)=直角方向離間距離/対応距離
従って、直角方向離間距離は、以下の式M4によって算出できる。
(式M4):直角方向離間距離=(車両走行距離・tan(標識車両間角度)・tan(第2標識車両間角度))/(tan(第2標識車両間角度)-tan(標識車両間角度))
以上を踏まえ、図7の例の場合、以下の式が成り立つ。
(式M2´):tanθ1=直角方向離間距離C/(車両走行距離E+対応距離x)
(式M3´):tanθ2=直角方向離間距離C/対応距離x
そして、直角方向離間距離Cは、以下の式M4´によって算出できる。
(式M4´):直角方向離間距離C=(車両走行距離E・tanθ1・tanθ2)/(tanθ2-tanθ1)
(式M2):tan(標識車両間角度)=直角方向離間距離/(車両走行距離+対応距離)
(式M3):tan(第2標識車両間角度)=直角方向離間距離/対応距離
従って、直角方向離間距離は、以下の式M4によって算出できる。
(式M4):直角方向離間距離=(車両走行距離・tan(標識車両間角度)・tan(第2標識車両間角度))/(tan(第2標識車両間角度)-tan(標識車両間角度))
以上を踏まえ、図7の例の場合、以下の式が成り立つ。
(式M2´):tanθ1=直角方向離間距離C/(車両走行距離E+対応距離x)
(式M3´):tanθ2=直角方向離間距離C/対応距離x
そして、直角方向離間距離Cは、以下の式M4´によって算出できる。
(式M4´):直角方向離間距離C=(車両走行距離E・tanθ1・tanθ2)/(tanθ2-tanθ1)
ステップSB5において、制御部10は、上述した式M4を用いて、直角方向離間距離を算出する。
以上、本実施形態に係る車載ナビゲーション装置1の制御部10が、自車両の位置(走行している車線)を検出する際の動作について説明した。本実施形態で説明した処理を行えば、第1実施形態と同様、より高い精度での自車両の位置の検出が可能となる。
なお、本実施形態では、自車両の現在位置を頂点とする角度(標識車両間角度、第2標識車両間角度)の算出を2回行っていたが、これを自車両の走行に応じて、3回以上、実行し、算出した各角度に基づいて、上述した方法に対応する方法で、自車両の道路標識に対する相対位置(直角方向離間距離)を算出する構成であってもよい。この構成によれば、より高い精度で、相対位置を算出できる。
また、上述した実施形態では、車載カメラ20は自車両の前方を撮影し、制御部10は自車両の前方の撮影結果に基づく撮影画像データに基づいて、自車両の道路標識に対する相対位置を算出した。一方で、車載カメラ20が、自車両の側方や、後方を撮影可能な位置に設けてあれば、制御部10は、上述した方法により、自車両の側方や、後方の撮影結果に基づく撮影画像データに基づいて、自車両の道路標識に対する相対位置を算出することが可能である。
なお、本実施形態では、自車両の現在位置を頂点とする角度(標識車両間角度、第2標識車両間角度)の算出を2回行っていたが、これを自車両の走行に応じて、3回以上、実行し、算出した各角度に基づいて、上述した方法に対応する方法で、自車両の道路標識に対する相対位置(直角方向離間距離)を算出する構成であってもよい。この構成によれば、より高い精度で、相対位置を算出できる。
また、上述した実施形態では、車載カメラ20は自車両の前方を撮影し、制御部10は自車両の前方の撮影結果に基づく撮影画像データに基づいて、自車両の道路標識に対する相対位置を算出した。一方で、車載カメラ20が、自車両の側方や、後方を撮影可能な位置に設けてあれば、制御部10は、上述した方法により、自車両の側方や、後方の撮影結果に基づく撮影画像データに基づいて、自車両の道路標識に対する相対位置を算出することが可能である。
<第3実施形態>
次いで、第3実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
次いで、第3実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
上述した第1実施形態、及び、第2実施形態では、少なくとも自車両の現在位置から、道路標識まで、道路(走行レーン)が屈曲していないことを前提とした。一方、本実施形態では、自車両の現在位置から、道路標識までの間で道路(走行レーン)が屈曲している場合の車載ナビゲーション装置1の動作について説明する。
図8は、本実施形態に係る車載ナビゲーション装置1の動作を示すフローチャートである。
図9は、自車両が所定の走行レーンを走行している場合において、当該走行レーンと、自車両の現在位置である位置Z1、及び、自車両の位置の検出に利用する道路標識の位置である位置Z2との関係の一例を示す図である。
図9は、自車両が所定の走行レーンを走行している場合において、当該走行レーンと、自車両の現在位置である位置Z1、及び、自車両の位置の検出に利用する道路標識の位置である位置Z2との関係の一例を示す図である。
車載ナビゲーション装置1は、図8に示すフローチャートの処理を、以下の場合に実行する。すなわち、車載ナビゲーション装置1の制御部10は、撮影画像データに、道路標識の画像に係る対象画像データが含まれている場合、所定の手段で、自車両の現在位置から、道路標識までの間で道路が屈曲しているか否かを判別する。例えば、制御部10は、自車両が走行する道路(走行レーン)のリンク情報を取得し、リンク情報と、自車両の位置、及び、道路標識の位置との関係に基づいて、自車両の現在位置から、道路標識までの間で道路が屈曲しているか否かを判別する。道路が屈曲しているか否かを判別する方法は、例示した方法に限らず、どのような方法であってもよい。
そして、制御部10は、自車両の現在位置から、道路標識までの間で道路が屈曲していると判別した場合、図8のフローチャートの処理を実行する。
そして、制御部10は、自車両の現在位置から、道路標識までの間で道路が屈曲していると判別した場合、図8のフローチャートの処理を実行する。
以下の図8のフローチャートの開始時点では、制御部10は、図3のフローチャートのステップSA1、及び、ステップSA3に対応する処理を実行しているものとする。
図8に示すように、車載ナビゲーション装置1の制御部10は、第1実施形態で説明した方法と同様の方法で、撮影画像データに含まれる道路標識の画像に係る対象画像データに基づいて、標識車両間距離(図9の例では、標識車両間距離F。)、及び、標識車両間角度(図9の例では、角度θ3。)を算出する(ステップSC1)。
次いで、制御部10は、道路情報データ1211を参照し、上述した第1実施形態で説明した方法と同様の方法で、態様画像データに対応する道路標識のレコードを特定し、特定したレコードが有する標識位置情報J13を取得する(ステップSC2)。上述したように、標識位置情報J13は、道路標識の位置(経度、及び、緯度で表される位置。地図データ121に基づく地図が展開される所定の座標系における座標であってもよい。)を示す情報である。
次いで、制御部10は、道路情報データ1211を参照し、上述した第1実施形態で説明した方法と同様の方法で、態様画像データに対応する道路標識のレコードを特定し、特定したレコードが有する標識位置情報J13を取得する(ステップSC2)。上述したように、標識位置情報J13は、道路標識の位置(経度、及び、緯度で表される位置。地図データ121に基づく地図が展開される所定の座標系における座標であってもよい。)を示す情報である。
次いで、制御部10は、ステップSC2で取得した標識位置情報J13が示す道路標識の位置(図9の例では、位置Z2)と、ステップSC1で算出した標識車両間距離(図9の例では、標識車両間距離F。)、及び、標識車両間角度(図9の例では、角度θ3。)に基づいて、自車両の現在位置(図9の例では位置Z1)を算出する(ステップSC3)。
標識車両間距離、及び、標識車両間角度が定まることにより、道路標識に対する自車両の相対位置が定まるため、道路標識の位置が定まることにより、自車両の現在位置が定まる。
標識車両間距離、及び、標識車両間角度が定まることにより、道路標識に対する自車両の相対位置が定まるため、道路標識の位置が定まることにより、自車両の現在位置が定まる。
次いで、制御部10は、地図データ121を参照し、自車両が走行する道路(走行レーン)の中心線に関する情報(以下、「中心線情報」という。)を取得する(ステップSC4)。
本実施形態において、道路の中心線とは、車道において、進行方向が相対する走行レーンを含めた道路幅全体に対して直角方向の中心をたどる線のことであり、図9の例では、中心線TSである。地図データ121では、地図上の中心線を、中心線に沿った直線(以下、「単位直線」という。)の集合体として管理する。例えば、図9の例では、中心線TSは、単位直線TS1、及び、単位直線TS2として管理される。そして、地図データ121は、単位直線のそれぞれについて、一方の端の地図上の位置と、他方の端の地図上の位置とを含む単位直線情報を有する。
ステップSC4において、制御部10は、中心線情報として、自車両の位置の側方に位置する単位直線(図9の例では、単位直線TS1)の単位直線情報を取得する。
本実施形態において、道路の中心線とは、車道において、進行方向が相対する走行レーンを含めた道路幅全体に対して直角方向の中心をたどる線のことであり、図9の例では、中心線TSである。地図データ121では、地図上の中心線を、中心線に沿った直線(以下、「単位直線」という。)の集合体として管理する。例えば、図9の例では、中心線TSは、単位直線TS1、及び、単位直線TS2として管理される。そして、地図データ121は、単位直線のそれぞれについて、一方の端の地図上の位置と、他方の端の地図上の位置とを含む単位直線情報を有する。
ステップSC4において、制御部10は、中心線情報として、自車両の位置の側方に位置する単位直線(図9の例では、単位直線TS1)の単位直線情報を取得する。
次いで、制御部10は、ステップSC4で取得した単位直線情報が示す単位直線に対して、自車両の現在位置から垂線をおろした場合の、自車両の現在位置と、当該垂線及び当該単位直線の交点との長さ(図9の例では、長さN2)を算出する(ステップSC5)。
次いで、制御部10は、道路情報データ1211を参照し、走行中の道路の第1車線幅情報J241~第n車線幅情報J24nを取得する(ステップSC6)。
次いで、制御部10は、ステップSC4で取得した中心線情報(単位直線情報)、ステップSC5で算出した垂線の長さ、及び、ステップSC6で取得した第1車線幅情報J241~第n車線幅情報J24nに基づいて、自車両が走行している車線を特定する(ステップSC7)。
ここで、道路では、中心線から、進行方向に向かって左の方向に向かって、連続して車線が設けられる。従って、道路に設けられた各車線の幅、及び、中心線と自車両の現在位置との距離が定まれば、自車両が位置する車線が定まる。
以上を踏まえ、ステップSC7において、制御部10は、垂線と、中心線との交点の地図上の位置を算出し、当該位置と、垂線の長さと、車線の幅との関係に基づいて、自車両が走行している車線を特定する。
ここで、道路では、中心線から、進行方向に向かって左の方向に向かって、連続して車線が設けられる。従って、道路に設けられた各車線の幅、及び、中心線と自車両の現在位置との距離が定まれば、自車両が位置する車線が定まる。
以上を踏まえ、ステップSC7において、制御部10は、垂線と、中心線との交点の地図上の位置を算出し、当該位置と、垂線の長さと、車線の幅との関係に基づいて、自車両が走行している車線を特定する。
以上、本実施形態に係る車載ナビゲーション装置1の制御部10が、自車両の位置(走行している車線)を検出する際の動作について説明した。本実施形態で説明した処理を行えば、第1実施形態や、第2実施形態と同様、より高い精度での自車両の位置の検出が可能となる。
<第4実施形態>
次いで、第4実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
次いで、第4実施形態について説明する。
以下の説明において、第1実施形態で説明した構成要素と同一の構成要素については、同一の符号を付与し、その詳細な説明を省略する。
図10は、第4実施形態に係る車両位置検出システム2を示す図である。
上述した第1~第3実施形態では、車両に搭載された装置が、自車両の現在地の検出に係る処理を実行した。一方で、本実施形態では、当該処理を、車両に搭載された装置とネットワークNを介して通信可能な制御サーバー3が実行する。
本実施形態では、制御サーバー3が、「情報処理装置」として機能する。
上述した第1~第3実施形態では、車両に搭載された装置が、自車両の現在地の検出に係る処理を実行した。一方で、本実施形態では、当該処理を、車両に搭載された装置とネットワークNを介して通信可能な制御サーバー3が実行する。
本実施形態では、制御サーバー3が、「情報処理装置」として機能する。
図10に示すように、車両には、本実施形態に係る車載装置1bが搭載される。本実施形態に係る車載装置1bには、車載カメラ20が接続される。
車載装置1bは、インターネットを含んで構成されたネットワークNを介して制御サーバー3と通信可能に接続される。車載装置1bにネットワークNにアクセスする機能を設け、車載装置1bがネットワークNに直接アクセスする構成であってもよく、車載装置1bとネットワークNへアクセスする機能を有する端末(例えば、車両の搭乗者が所有する携帯電話)とを近距離無線通信や有線通信、その他の通信方式で接続し、車載装置1bが端末を介してネットワークNにアクセスする構成であってもよい。
車載装置1bは、インターネットを含んで構成されたネットワークNを介して制御サーバー3と通信可能に接続される。車載装置1bにネットワークNにアクセスする機能を設け、車載装置1bがネットワークNに直接アクセスする構成であってもよく、車載装置1bとネットワークNへアクセスする機能を有する端末(例えば、車両の搭乗者が所有する携帯電話)とを近距離無線通信や有線通信、その他の通信方式で接続し、車載装置1bが端末を介してネットワークNにアクセスする構成であってもよい。
車載装置1bは、車載カメラ20から入力された撮影画像データを、ネットワークNを介して、車載ナビゲーション装置1に送信する機能を有する。
制御サーバー5は、CPUや、ROM、RAM、その他の周辺回路等を備え、プログラムを読み出して実行する等のハードウェアとソフトウェアとの協働により、制御サーバー5の各部を制御するサーバー制御部6を備える。
サーバー制御部6は、「制御部」として機能する。
サーバー制御部6は、車載装置1bから撮影画像データを受信し、受信した撮影画像データに基づいて、図3、図6、又は、図8のフローチャートに対応する処理を行って、道路標識に対する自車両の相対位置を検出する。当該検出に係る処理に必要な情報(例えば、上述した推定現在位置に対応する情報や、道路情報データ1211に含まれる情報等)について、制御サーバー5は、自ら記憶し、又は、必要に応じて適切なタイミングで車載装置1bから取得する。サーバー制御部6は、検出した道路標識に対する自車両の相対位置を示す情報を、適宜、検出結果を車載装置1bに通知する。
車載装置1bは、制御サーバー5からの通知に基づいて、対応する処理を実行する。
サーバー制御部6は、「制御部」として機能する。
サーバー制御部6は、車載装置1bから撮影画像データを受信し、受信した撮影画像データに基づいて、図3、図6、又は、図8のフローチャートに対応する処理を行って、道路標識に対する自車両の相対位置を検出する。当該検出に係る処理に必要な情報(例えば、上述した推定現在位置に対応する情報や、道路情報データ1211に含まれる情報等)について、制御サーバー5は、自ら記憶し、又は、必要に応じて適切なタイミングで車載装置1bから取得する。サーバー制御部6は、検出した道路標識に対する自車両の相対位置を示す情報を、適宜、検出結果を車載装置1bに通知する。
車載装置1bは、制御サーバー5からの通知に基づいて、対応する処理を実行する。
以上、第4実施形態について説明したが、第4実施形態の構成であっても、車両に搭載された車載装置1bは、道路標識に対する自車両の相対位置を取得可能であり、取得した相対位置に基づいて、対応する処理を実行可能である。
なお、上述した実施の形態は、あくまでも本発明の一態様を示すものであり、本発明の範囲内で任意に変形および応用が可能である。
例えば、上述した実施形態では、車載ナビゲーション装置1、及び、制御サーバー5は、対象物としての道路標識に対する自車両の相対位置を検出していた。しかしながら、対象物は、道路標識に限らず、車載カメラ20によって撮影可能な物であれば、何であってもよい。例えば、対象物は、信号や、建物、看板等であってもよい。ただし、道路標識は、設けられる位置が道路との関係である程度定められているという特性、地図データ121で管理されるという特性、種類が限られており種類ごとの形状の規格があるという特性があり、対象物として適切である。
例えば、上述した実施形態では、車載ナビゲーション装置1、及び、制御サーバー5は、対象物としての道路標識に対する自車両の相対位置を検出していた。しかしながら、対象物は、道路標識に限らず、車載カメラ20によって撮影可能な物であれば、何であってもよい。例えば、対象物は、信号や、建物、看板等であってもよい。ただし、道路標識は、設けられる位置が道路との関係である程度定められているという特性、地図データ121で管理されるという特性、種類が限られており種類ごとの形状の規格があるという特性があり、対象物として適切である。
また、図1、図10は、本願発明を理解容易にするために、車載ナビゲーション装置1、及び、制御サーバー5の機能構成を主な処理内容に応じて分類して示した概略図であり、これら装置の構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、1つの構成要素がさらに多くの処理を実行するように分類することもできる。また、各構成要素の処理は、1つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。また、各構成要素の処理は、1つのプログラムで実現されてもよいし、複数のプログラムで実現されてもよい。
また、図を用いて説明したフローチャートの処理単位は、車載ナビゲーション装置1、及び、制御サーバー5の処理を理解容易にするために、主な処理内容に応じて分割したものである。処理単位の分割の仕方や名称によって、本願発明が制限されることはない。各装置の処理は、処理内容に応じて、さらに多くの処理単位に分割することもできる。また、1つの処理単位がさらに多くの処理を含むように分割することもできる。また、同様のフリー状態判定が行えれば、上記のフローチャートの処理順序も、図示した例に限られるものではない。
また、上述した実施形態では、車載ナビゲーション装置1は、外部装置である車載カメラ20から撮影画像データを取得する構成であったが、車載ナビゲーション装置1が撮影機能を有する構成であってもよい。
また、図を用いて説明したフローチャートの処理単位は、車載ナビゲーション装置1、及び、制御サーバー5の処理を理解容易にするために、主な処理内容に応じて分割したものである。処理単位の分割の仕方や名称によって、本願発明が制限されることはない。各装置の処理は、処理内容に応じて、さらに多くの処理単位に分割することもできる。また、1つの処理単位がさらに多くの処理を含むように分割することもできる。また、同様のフリー状態判定が行えれば、上記のフローチャートの処理順序も、図示した例に限られるものではない。
また、上述した実施形態では、車載ナビゲーション装置1は、外部装置である車載カメラ20から撮影画像データを取得する構成であったが、車載ナビゲーション装置1が撮影機能を有する構成であってもよい。
1…車載ナビゲーション装置(情報処理装置)、5…制御サーバー(情報処理装置)、6…サーバー制御部(制御部)、10…制御部、12…記憶部、15…インターフェース、20…車載カメラ(撮影装置)。
Claims (13)
- 車両に搭載された情報処理装置において、
車両の外を撮影して得られた撮影画像データを取得し、前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、算出した前記相対位置に基づいて、前記車両の道路上の位置を検出する制御部を備える
ことを特徴とする情報処理装置。 - 前記制御部は、
記憶された前記対象画像データに対応する画像データと前記撮影画像データとの比較結果に基づいて、前記撮影画像データに前記対象画像データが含まれるか否かを判別する
ことを特徴とする請求項1に記載の情報処理装置。 - 前記対象物の位置を示す情報、及び、前記対象物と道路との関係を示す情報を含む道路情報を記憶する記憶部を備え、
前記制御部は、
算出した前記相対位置、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出する
ことを特徴とする請求項1又は2に記載の情報処理装置。 - 前記制御部は、
前記相対位置として、前記車両の進行方向に交わる方向における前記車両と前記対象物との離間距離である直角方向離間距離を算出し、
算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする請求項3に記載の情報処理装置。 - 前記道路情報は、道路が有する車線の幅に関する情報、及び、前記対象物と道路との離間距離に関する情報を含み、
前記制御部は、
算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両が走行している車線を特定することを特徴とする請求項4に記載の情報処理装置。 - 前記対象物は、道路標識を含むことを特徴とする請求項1から5のいずれか1項に記載の情報処理装置。
- 撮影機能を有する撮影装置が接続可能なインターフェースを備え、
前記制御部は、
前記インターフェースを介して前記撮影装置から前記撮影画像データを受信して取得することを特徴とする請求項1から6のいずれか1項に記載の情報処理装置。 - 制御部により、
車両の外を撮影して得られた撮影画像データを取得し、
前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、
算出した前記相対位置に基づいて、前記車両の道路上の位置を検出する
ことを特徴とする車両位置検出方法。 - 前記対象画像データに対応する画像データを記憶し、記憶した前記対象画像データに対応する画像データと前記撮影画像データとの比較結果に基づいて、前記撮影画像データに前記対象画像データが含まれるか否かを判別することを特徴とする請求項8に記載の車載位置検出方法。
- 算出した前記相対位置、及び、前記対象物の位置を示す情報及び前記対象物と道路との関係を示す情報を含む道路情報に基づいて、前記車両の道路上の位置を算出する
ことを特徴とする請求項8又は9に記載の車両位置検出方法。 - 前記相対位置として、前記車両の進行方向に交わる方向における前記車両と前記対象物との離間距離である直角方向離間距離を算出し、
算出した前記直角方向離間距離、及び、前記記憶部が記憶する前記道路情報に基づいて、前記車両の道路上の位置を算出することを特徴とする請求項10に記載の車両位置検出方法。 - 算出した前記直角方向離間距離、及び、道路が有する車線の幅に関する情報及び前記対象物と道路との離間距離に関する情報を含む前記道路情報に基づいて、前記車両が走行している車線を特定することを特徴とする請求項11に記載の車両位置検出方法。
- 車両に搭載された車載装置とネットワークを介して通信可能に接続された情報処理装置において、
前記車載装置から、前記車両の外を撮影して得られた撮影画像データを取得し、前記撮影画像データに、所定の対象物の画像データである対象画像データが含まれる場合、前記対象画像データに基づいて、前記対象物に対する前記車両の相対位置を算出し、算出した前記相対位置に基づいて、前記車両の道路上の位置を検出し、検出結果を前記車載装置に通知する制御部を備える
ことを特徴とする情報処理装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16765066.2A EP3279611A4 (en) | 2015-03-19 | 2016-03-17 | Information processing device, and vehicle position detecting method |
| US15/556,116 US20180045516A1 (en) | 2015-03-19 | 2016-03-17 | Information processing device and vehicle position detecting method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015056157A JP2016176769A (ja) | 2015-03-19 | 2015-03-19 | 情報処理装置、及び、車両位置検出方法 |
| JP2015-056157 | 2015-03-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016148237A1 true WO2016148237A1 (ja) | 2016-09-22 |
Family
ID=56919246
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/058501 WO2016148237A1 (ja) | 2015-03-19 | 2016-03-17 | 情報処理装置、及び、車両位置検出方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20180045516A1 (ja) |
| EP (1) | EP3279611A4 (ja) |
| JP (1) | JP2016176769A (ja) |
| WO (1) | WO2016148237A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108051836A (zh) * | 2017-11-02 | 2018-05-18 | 中兴通讯股份有限公司 | 一种定位方法、装置、服务器及系统 |
| CN110018503A (zh) * | 2018-01-10 | 2019-07-16 | 上海汽车集团股份有限公司 | 车辆的定位方法及定位系统 |
| CN110287803A (zh) * | 2019-05-29 | 2019-09-27 | 广州小鹏汽车科技有限公司 | 一种轨迹路标的识别方法及系统 |
| JP2021169989A (ja) * | 2020-04-17 | 2021-10-28 | 株式会社Nichijo | 自己位置測定システム、車両、及び、自己位置測定方法 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2992006C (en) * | 2015-07-13 | 2018-08-21 | Nissan Motor Co., Ltd. | Own-position estimation device and own-position estimation method |
| JP6602683B2 (ja) * | 2016-02-05 | 2019-11-06 | 株式会社東芝 | 充電装置および位置ずれ検出方法 |
| EP3239660B1 (en) * | 2016-04-26 | 2019-06-19 | Volvo Car Corporation | Method and system for selectively enabling a user device on the move to utilize digital content associated with entities ahead |
| JPWO2017199369A1 (ja) * | 2016-05-18 | 2019-03-07 | パイオニア株式会社 | 地物認識装置、地物認識方法およびプログラム |
| KR20190031544A (ko) * | 2016-07-26 | 2019-03-26 | 닛산 지도우샤 가부시키가이샤 | 자기 위치 추정 방법 및 자기 위치 추정 장치 |
| KR102406498B1 (ko) * | 2016-12-07 | 2022-06-10 | 현대자동차주식회사 | 차량의 자율주행모드와 운전보조모드 간의 변환방법 |
| KR102695518B1 (ko) * | 2017-01-26 | 2024-08-14 | 삼성전자주식회사 | 차량 경로 가이드 방법 및 장치 |
| DE102017001707A1 (de) * | 2017-02-22 | 2018-08-23 | GM Global Technology Operations LLC (n. d. Ges. d. Staates Delaware) | Benachrichtigung über einen geschätzten Bewegungspfad eines Fahrzeugs |
| JP6946044B2 (ja) * | 2017-04-27 | 2021-10-06 | 株式会社ゼンリン | 走行支援装置及びプログラム |
| JP7079070B2 (ja) | 2017-04-27 | 2022-06-01 | 株式会社ゼンリン | 走行支援装置及びプログラム |
| JP6986557B2 (ja) * | 2017-05-19 | 2021-12-22 | パイオニア株式会社 | 測定装置、測定方法およびプログラム |
| JP6838522B2 (ja) * | 2017-08-10 | 2021-03-03 | トヨタ自動車株式会社 | 画像収集システム、画像収集方法、画像収集装置、および記録媒体 |
| JP6941677B2 (ja) * | 2017-08-25 | 2021-09-29 | 日立Astemo株式会社 | 画像認識装置 |
| FR3072182A1 (fr) * | 2018-03-05 | 2019-04-12 | Continental Automotive France | Calculateur, systeme et procede de geolocalisation d'un vehicule |
| US10558872B2 (en) * | 2018-03-23 | 2020-02-11 | Veoneer Us Inc. | Localization by vision |
| CN111936820A (zh) * | 2018-03-30 | 2020-11-13 | 丰田自动车欧洲公司 | 用于调整车辆外部位置信息的系统和方法 |
| JP7025293B2 (ja) * | 2018-07-10 | 2022-02-24 | トヨタ自動車株式会社 | 自車位置推定装置 |
| CN109029458B (zh) * | 2018-07-19 | 2020-06-30 | 东莞信大融合创新研究院 | 一种双目视觉定位的方法 |
| WO2020021596A1 (ja) * | 2018-07-23 | 2020-01-30 | 三菱電機株式会社 | 車両位置推定装置および車両位置推定方法 |
| GB201818357D0 (en) * | 2018-11-12 | 2018-12-26 | Forsberg Services Ltd | Locating system |
| US11003190B2 (en) | 2018-12-13 | 2021-05-11 | Here Global B.V. | Methods and systems for determining positional offset associated with a road sign |
| TWI696144B (zh) | 2018-12-19 | 2020-06-11 | 財團法人工業技術研究院 | 影像生成器的訓練方法 |
| CN112149659B (zh) * | 2019-06-27 | 2021-11-09 | 浙江商汤科技开发有限公司 | 定位方法及装置、电子设备和存储介质 |
| CN110727269B (zh) * | 2019-10-09 | 2023-06-23 | 陈浩能 | 车辆控制方法及相关产品 |
| US11125575B2 (en) | 2019-11-20 | 2021-09-21 | Here Global B.V. | Method and apparatus for estimating a location of a vehicle |
| JP2022178701A (ja) * | 2021-05-20 | 2022-12-02 | フォルシアクラリオン・エレクトロニクス株式会社 | ナビゲーション装置 |
| CN116380107B (zh) * | 2023-05-29 | 2023-08-22 | 速度科技股份有限公司 | 一种基于高精地图对车辆进行定位的系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04163251A (ja) * | 1990-10-29 | 1992-06-08 | Oki Electric Ind Co Ltd | 走行車線認識システム |
| JP2009033743A (ja) * | 2007-07-30 | 2009-02-12 | Delphi Technologies Inc | 物体を認識するための方法 |
| JP2010519550A (ja) * | 2007-02-21 | 2010-06-03 | テレ アトラス ノース アメリカ インコーポレイテッド | 絶対座標及び相対座標を含む車両ナビゲーション及び案内のためのシステム及び方法 |
| US20130261838A1 (en) * | 2012-03-28 | 2013-10-03 | Gentex Corporation | Vehicular imaging system and method for determining roadway width |
| WO2014166532A1 (en) * | 2013-04-10 | 2014-10-16 | Harman Becker Automotive Systems Gmbh | Navigation system and method of determining a vehicle position |
| JP2014203115A (ja) * | 2013-04-01 | 2014-10-27 | パイオニア株式会社 | 検出装置、制御方法、プログラム及び記憶媒体 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007232690A (ja) * | 2006-03-03 | 2007-09-13 | Denso Corp | 現在地検出装置、地図表示装置、および現在地検出方法 |
| JP2011013039A (ja) * | 2009-06-30 | 2011-01-20 | Clarion Co Ltd | 車線判定装置及びナビゲーションシステム |
| US9052207B2 (en) * | 2009-10-22 | 2015-06-09 | Tomtom Polska Sp. Z O.O. | System and method for vehicle navigation using lateral offsets |
| DE102011112404B4 (de) * | 2011-09-03 | 2014-03-20 | Audi Ag | Verfahren zum Bestimmen der Position eines Kraftfahrzeugs |
| EP2950291A4 (en) * | 2013-01-25 | 2016-10-12 | Toyota Motor Co Ltd | ROAD AREA DETECTION SYSTEM |
| JP2015003566A (ja) * | 2013-06-19 | 2015-01-08 | トヨタ自動車株式会社 | 逸脱防止装置 |
| US9205835B2 (en) * | 2014-01-30 | 2015-12-08 | Mobileye Vision Technologies Ltd. | Systems and methods for detecting low-height objects in a roadway |
-
2015
- 2015-03-19 JP JP2015056157A patent/JP2016176769A/ja active Pending
-
2016
- 2016-03-17 WO PCT/JP2016/058501 patent/WO2016148237A1/ja active Application Filing
- 2016-03-17 US US15/556,116 patent/US20180045516A1/en not_active Abandoned
- 2016-03-17 EP EP16765066.2A patent/EP3279611A4/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04163251A (ja) * | 1990-10-29 | 1992-06-08 | Oki Electric Ind Co Ltd | 走行車線認識システム |
| JP2010519550A (ja) * | 2007-02-21 | 2010-06-03 | テレ アトラス ノース アメリカ インコーポレイテッド | 絶対座標及び相対座標を含む車両ナビゲーション及び案内のためのシステム及び方法 |
| JP2009033743A (ja) * | 2007-07-30 | 2009-02-12 | Delphi Technologies Inc | 物体を認識するための方法 |
| US20130261838A1 (en) * | 2012-03-28 | 2013-10-03 | Gentex Corporation | Vehicular imaging system and method for determining roadway width |
| JP2014203115A (ja) * | 2013-04-01 | 2014-10-27 | パイオニア株式会社 | 検出装置、制御方法、プログラム及び記憶媒体 |
| WO2014166532A1 (en) * | 2013-04-10 | 2014-10-16 | Harman Becker Automotive Systems Gmbh | Navigation system and method of determining a vehicle position |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3279611A4 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108051836A (zh) * | 2017-11-02 | 2018-05-18 | 中兴通讯股份有限公司 | 一种定位方法、装置、服务器及系统 |
| CN108051836B (zh) * | 2017-11-02 | 2022-06-10 | 中兴通讯股份有限公司 | 一种定位方法、装置、服务器及系统 |
| US12117541B2 (en) | 2017-11-02 | 2024-10-15 | Zte Corporation | Positioning method and device, and server and system |
| CN110018503A (zh) * | 2018-01-10 | 2019-07-16 | 上海汽车集团股份有限公司 | 车辆的定位方法及定位系统 |
| CN110287803A (zh) * | 2019-05-29 | 2019-09-27 | 广州小鹏汽车科技有限公司 | 一种轨迹路标的识别方法及系统 |
| CN110287803B (zh) * | 2019-05-29 | 2021-07-13 | 广州小鹏自动驾驶科技有限公司 | 一种轨迹路标的识别方法及系统 |
| JP2021169989A (ja) * | 2020-04-17 | 2021-10-28 | 株式会社Nichijo | 自己位置測定システム、車両、及び、自己位置測定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180045516A1 (en) | 2018-02-15 |
| EP3279611A1 (en) | 2018-02-07 |
| EP3279611A4 (en) | 2018-11-21 |
| JP2016176769A (ja) | 2016-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016148237A1 (ja) | 情報処理装置、及び、車両位置検出方法 | |
| CN113570893B (zh) | 自动驾驶辅助装置、控制方法及存储介质 | |
| CN107251123B (zh) | 车辆组管理装置、车辆组管理方法和车辆组显示装置 | |
| JP6775188B2 (ja) | ヘッドアップディスプレイ装置および表示制御方法 | |
| JP5461065B2 (ja) | 現在位置特定装置とその現在位置特定方法 | |
| JP4831434B2 (ja) | 地物情報収集装置及び地物情報収集プログラム、並びに自車位置認識装置及びナビゲーション装置 | |
| EP2336998A2 (en) | Travel guiding apparatus for vehicle, travel guiding method for vehicle, and computer-readable storage medium | |
| US11720992B2 (en) | Method, apparatus, and computer program product for generating an overhead view of an environment from a perspective image | |
| CN102208036A (zh) | 车辆位置检测系统 | |
| JP2016095831A (ja) | 運転支援システム及びセンタ | |
| JP2007108043A (ja) | 位置測位装置、および位置測位方法 | |
| US11410429B2 (en) | Image collection system, image collection method, image collection device, recording medium, and vehicle communication device | |
| US20170323566A1 (en) | Electronic apparatus, guide method, and guide system | |
| JP7088136B2 (ja) | 標示物認識システム及び標示物認識方法 | |
| JP2011123840A (ja) | 車両案内装置、車両案内方法、及び車両案内プログラム | |
| CN113748447A (zh) | 幽灵交通拥堵检测和避免 | |
| JP2019191653A (ja) | 地図情報更新システムおよび地図情報更新プログラム | |
| JP2009205403A (ja) | 道路標示認識装置、および道路標示認識方法 | |
| JP6875057B2 (ja) | 電子装置、走行レーン検出プログラムおよび走行レーン検出方法 | |
| JP4936070B2 (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| JP6165422B2 (ja) | 情報処理システム、情報処理装置、サーバ、端末装置、情報処理方法、及びプログラム | |
| JP2013036930A (ja) | ナビゲーション装置およびこれを備えたナビゲーションシステム | |
| JP2017120238A (ja) | ナビ情報提供システム及びナビ情報提供装置 | |
| US20190073828A1 (en) | Head-up display system | |
| JP4953015B2 (ja) | 自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16765066 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15556116 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2016765066 Country of ref document: EP |