JP4936070B2 - ナビゲーション装置及びナビゲーションプログラム - Google Patents
ナビゲーション装置及びナビゲーションプログラム Download PDFInfo
- Publication number
- JP4936070B2 JP4936070B2 JP2007339574A JP2007339574A JP4936070B2 JP 4936070 B2 JP4936070 B2 JP 4936070B2 JP 2007339574 A JP2007339574 A JP 2007339574A JP 2007339574 A JP2007339574 A JP 2007339574A JP 4936070 B2 JP4936070 B2 JP 4936070B2
- Authority
- JP
- Japan
- Prior art keywords
- link
- road
- vehicle
- information
- route search
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000006870 function Effects 0.000 claims description 150
- 238000012937 correction Methods 0.000 claims description 89
- 238000012545 processing Methods 0.000 description 79
- 238000000034 method Methods 0.000 description 15
- 238000003384 imaging method Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000003708 edge detection Methods 0.000 description 2
- 241000283070 Equus zebra Species 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011982 device technology Methods 0.000 description 1
- 238000005401 electroluminescence Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images






Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Mobile Radio Communication Systems (AREA)
Description
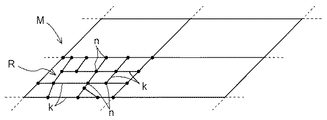
地図データベースDB1は、所定の区画毎に分けられた地図情報Mが記憶されたデータベースである。図3は、地図データベースDB1に記憶されている地図情報Mの構成の例を示す図である。この図に示すように、地図情報Mは、複数の道路リンクkの接続関係により道路ネットワークを表す道路情報Rを含んでいる。道路ネットワークは、道路リンクkと、2つの道路リンクkの接続点にあたる交差点ノードnとにより構成される。交差点ノードnは現実の道路における交差点に対応し、道路リンクkは、各交差点間を結ぶ道路に対応している。各交差点ノードnは、緯度及び経度で表現された地図上の位置(座標)の情報を有している。各道路リンクkは、リンク属性情報として、基本リンクコストCL、道路長、道路種別、道路幅、レーン数、リンク形状を表現するための形状補間点等の情報を有している。ここで、基本リンクコストCLは、道路長や道路種別等の道路属性に応じて各道路リンクに予め設定されたリンクコストであり、経路探索の際に用いられる情報である。また、道路種別は、例えば、高速道路、国道、県道、一般道、細街路、導入路等のように、道路を複数の種別に区分した際の道路種別の情報である。交差点ノードnは、ノード属性情報として、ノードコストCN、通行規制、信号の有無等の情報を有している。なお、図3においては、一つの区画の道路情報Rのみを図示し、他の区画の道路情報Rは省略して示している。基本リンクコストCL及びノードコストCNに関しては後で詳細に説明する。
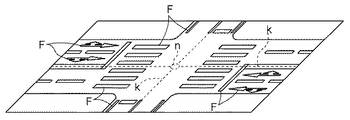
地物データベースDB2は、道路上や道路周辺に設けられた各種の地物の情報、すなわち地物情報Fが記憶されたデータベースである。この地物データベースDB2に地物情報Fが記憶される地物には、道路の路面に設けられた道路標示(ペイント標示)が含まれている。図4は、地物データベースDB2に記憶されている道路標示の地物情報Fの例を示す図である。このような道路標示に係る地物としては、例えば、横断歩道、停止線、最高速度等を表す速度標示、ゼブラゾーン、道路に沿って各レーンを区分する区画線(実線、破線、二重線等の各種区画線を含む。)、各レーンの進行方向を指定する進行方向別通行区分標示(矢印標示、例えば、直進矢印、右折矢印等を含む)等が含まれる。なお、地物情報Fが記憶される地物としては、このような道路標示のほか、信号機、標識、陸橋、トンネル、マンホール等の各種の地物も含めることができる。
表示入力装置27は、表示装置と入力装置が一体となった装置である。表示装置としては、例えば、液晶ディスプレイ、プラズマディスプレイ、有機EL(electroluminescence)ディスプレイ、電界放出ディスプレイ、CRT(cathode-ray tube)ディスプレイ等
の公知の各種の表示装置を用いることができる。また、入力装置としては、表示装置の表示画面上に配置されたタッチパネルや、表示画面の横に配置された操作スイッチ等がある。音声出力装置28は、スピーカやアンプ等を有して構成される。
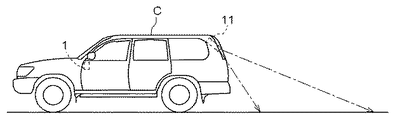
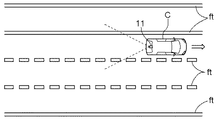
画像情報取得部12は、撮像装置11により自車両Cの周辺を撮影した画像情報Gを取得する画像情報取得手段として機能する。ここで、撮像装置11は、撮像素子を備えた車載カメラ等であって、少なくとも自車両Cの周辺の道路の路面を撮像可能な位置に設けられている。このような撮像装置11としては、例えば、図2に示すような自車両Cの後方の路面を撮像するバックカメラを用いると好適である。画像情報取得部12は、撮像装置11により撮像した撮像情報をフレームメモリ(不図示)等を介して所定の時間間隔で取り込む。この際の画像情報Gの取り込みの時間間隔は、例えば、10〜50ms程度とすることができる。これにより、画像情報取得部12は、撮像装置11により撮像した複数フレームの画像情報Gを連続的に取得することができる。ここで取得された画像情報Gは、画像認識部23へ出力される。
自車位置情報取得部13は、自車両Cの現在位置を表す自車位置情報Pを取得する自車位置情報取得手段として機能する。ここでは、自車位置情報取得部13は、GPS受信機14、方位センサ15、及び距離センサ16と接続されている。ここで、GPS受信機14は、GPS(Global Positioning System)衛星からのGPS信号を受信する装置である。このGPS信号は、通常1秒おきに受信され、自車位置情報取得部13へ出力される。自車位置情報取得部13では、GPS受信機14で受信されたGPS衛星からの信号を解析し、自車両Cの現在位置(緯度及び経度)、進行方位、移動速度等の情報を取得することができる。方位センサ15は、自車両Cの進行方位又はその進行方位の変化を検出するセンサである。この方位センサ15は、例えば、ジャイロセンサ、地磁気センサ、ハンドルの回転部に取り付けた光学的な回転センサや回転型の抵抗ボリューム、車輪部に取り
付ける角度センサ等により構成される。そして、方位センサ15は、その検出結果を自車位置情報取得部13へ出力する。距離センサ16は、自車両Cの車速や移動距離を検出するセンサである。この距離センサ16は、例えば、車両のドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサ、自車両Cの加速度を検知するヨー・Gセンサ及び検知された加速度を積分する回路等により構成される。そして、距離センサ16は、その検出結果としての車速及び移動距離の情報を自車位置情報取得部13へ出力する。
画像認識部23は、画像情報取得部12で取得された画像情報Gに対する画像認識処理を行う画像認識手段として機能する。すなわち、画像認識部23は、撮像装置11により自車両Cの周辺を撮影した画像情報Gに含まれる地物の画像認識処理を行う。この際、画像認識部23は、地物データベースDB2に記憶されている地物情報Fを用いて画像認識処理を行う。具体的には、画像認識部23は、自車位置情報Pに基づいて撮像装置11による撮像領域に含まれることになる地物を対象地物とし、当該対象地物の地物情報Fを地物データベースDB2から取得する。そして、画像認識部23は、画像情報取得部12で取得された画像情報Gに対して二値化処理やエッジ検出処理等を行い、当該画像情報Gに含まれている地物(道路標示)の輪郭情報を抽出する。その後、画像認識部23は、抽出された地物の輪郭情報と、地物データベースDB2から取得した対象地物の地物情報Fに含まれる形態情報とを比較し、それらが一致するか否かを判定する。地物の輪郭情報と対象地物の地物情報Fに含まれる形態情報とが一致する場合には、対象地物の画像認識に成功したと判定し、その画像認識結果を自車位置補正部25へ出力する。なお、対象地物の画像認識に失敗した場合には、自車位置補正部25へは画像認識結果が出力されず、したがって自車位置補正部25による自車位置情報Pの補正も行われない。
外部情報受信部24は、自車両Cの位置の特定に用いることができる特定情報を、自車両Cの外部から受信する情報受信手段として機能する。このような特定情報としては、例えば、VICS(Vehicle Information and Communication System:道路交通情報通信システム)からの情報、具体的には道路の各レーン上に設けられた発信器からの光ビーコンや電波ビーコンからの情報がある。これらの情報には、当該発信器が設置されているレーンを特定することができる情報が含まれている。この外部情報受信部24により受信した情報は、後述する走行レーン特定部26へ送られ、自車両Cの走行レーンの特定に用いられる。
自車位置補正部25は、画像認識部23による画像認識処理の結果と、地物データベースDB2から取得した地物情報Fに含まれる対象地物の位置情報とに基づいて自車位置情報Pを補正する自車位置情報補正手段である。本実施形態では、自車位置補正部25は、画像認識部23による画像認識処理の結果と、地物情報Fに含まれる対象地物の位置情報とに基づいて、自車両Cの進行方向に沿って自車位置情報Pを補正する。具体的には、自車位置補正部25は、まず、画像認識部23による画像認識結果と、撮像装置11の取付位置、取付角度、及び画角等に基づいて、対象地物の画像を含む画像情報Gの取得時における自車両Cと対象地物との位置関係を演算する。例えば、図5に示す状況で画像情報Gが取得された場合、自車位置補正部25は、画像情報Gの画像認識結果に基づいて自車両Cと対象地物ftとしての横断歩道との位置関係(例えば距離d)を演算する。次に、自車位置補正部25は、この自車両Cと対象地物ftとの位置関係の演算結果と、地物データベースDB2から取得した地物情報Fに含まれる対象地物の位置情報とに基づいて、自車両Cの進行方向における対象地物ftの位置情報(地物情報F)を基準とする高精度な自車両Cの位置情報を演算して取得する。そして、自車位置補正部25は、このようにして取得した高精度な自車両Cの位置情報に基づいて、自車位置情報取得部13で取得した自車位置情報Pに含まれる、自車両Cの進行方向の現在位置の情報を補正する。その結果、自車位置情報取得部13は、このような補正後の高精度な自車位置情報Pを取得することになる。よって、本実施形態においては、この自車位置補正部25及び自車位置情報取得部13が、自車両Cの周辺を撮影した画像情報Gに含まれる地物の画像認識結果と地物情報Fとを照合して自車両Cの位置を高精度に特定する自車位置特定手段29として機能する。
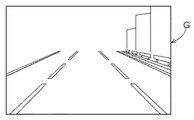
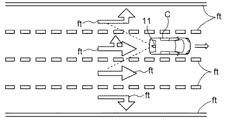
走行レーン特定部26は、自車両Cの走行レーンを特定する走行レーン特定手段として機能する。ここで、走行レーン特定部26は、画像認識部23による画像認識処理の結果と、地物データベースDB2から取得した地物情報Fとに基づいて自車両Cの走行レーンを特定する処理を行う。そのために、走行レーン特定部26は、例えば、画像情報取得部12により取得した画像情報Gに含まれる区画線の画像の画像認識部23による画像認識結果と、地物データベースDB2に記憶されている自車両Cが走行中の道路における自車位置周辺の区画線の地物情報Fとを用いる。具体的には、走行レーン特定部26は、画像認識部23による画像認識結果に示される自車両Cの周辺の区画線の種別(実線、破線、二重線等の線種)及び配置と、自車位置周辺の区画線の地物情報Fに含まれる形態情報とに基づいて、自車両Cの走行レーンを特定する。例えば、図6に示すような画像情報Gが取得された場合において、図7に示すような自車両Cの周辺の地物情報Fが取得された場合には、自車両Cが走行中のレーンは、3レーンの中の中央レーンであると特定することができる。すなわち、図6に示す画像情報Gに示される画像中では、自車両Cの位置である画像の幅方向中央に対して両側に破線の区画線があり、更にその両外側にそれぞれ実線の区画線がある。一方、図7に示す地物情報Fによれば、自車両Cが走行している道路は3レーンを有し、道路の幅方向両側には実線の区画線の地物情報Fが存在し、道路の幅方向中央側には各レーンを区切る破線の区画線の地物情報Fが存在していることがわかる。したがって、走行レーン特定部26は、これらの情報を対比することにより、自車両Cの走行レーンが3レーンの中の中央レーンであると特定することができる。
このナビゲーション装置1は、基本的なナビゲーション機能を実現するためのナビゲーション用演算処理部として、表示処理部17、マップマッチング処理部18、経路探索処理部19、案内処理部21、及び検索処理部22を備えている。ここで、表示処理部17は、表示入力装置27の表示画面に自車位置や目的地等の周辺の地図表示や当該地図上への自車位置表示等を行うための演算処理を行う処理部である。マップマッチング処理部18は、自車位置情報取得部13により取得された自車位置情報Pに示される自車位置が、地図データベースDB1に記憶された道路情報Rに含まれる道路上となるように、自車位置情報Pを補正するマップマッチング処理を行うための処理部である。経路探索処理部19は、例えば自車位置等の出発地から表示入力装置27により入力された目的地までの案内経路を探索するための演算処理を行う処理部である。本願は、この経路探索処理部19による経路探索処理に特徴がある。したがって、この点については後で詳細に説明する。案内処理部21は、経路探索処理部19により探索された出発地から目的地までの経路に従って、表示入力装置27の表示画面による案内表示や音声出力装置28による音声案内等により、使用者に対して適切な経路案内を行うための演算処理を行う処理部である。検索処理部22は、目的地や地図表示のための地点等を、住所、電話番号、施設名称、ジャンル等に基づいて検索するための演算処理を行う処理部である。
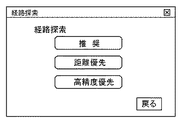
次に、本発明の特徴構成となる経路探索処理部19の機能について詳細に説明する。経路探索処理部19は、複数の道路リンクkの接続関係により道路ネットワークを表す道路情報Rに基づいて出発地から目的地までの経路を探索する経路探索手段として機能する。本実施形態においては、経路探索処理部19は、互いに異なる条件により経路探索を行う複数の経路探索機能を選択可能に備えている。したがって、このナビゲーション装置1では、例えば自車位置情報Pに示される自車両Cの現在位置等を出発地とし、表示入力装置27を用いて使用者により目的地が入力された際に、これら複数の経路探索機能を選択可能に表示入力装置27に表示する。図10は、このような複数の経路探索機能を選択可能に表示した表示画面である探索機能選択画面の例を示す図である。この図に示すように、本実施形態においては、経路探索処理部19は、推奨経路探索機能、距離優先探索機能、及び高精度優先経路探索機能の3つの経路探索機能を選択可能に備えている。
合計コスト=300+50+500+0+300=1150・・・(1)
同様に、経路「a−c−f−h」の合計コストは、以下の式(2)で求められる。
合計コスト=200+100+400+100+300=1100・・・(2)
また、経路「a−d−g−h」の合計コストは、以下の式(3)で求められる。
合計コスト=200+0+400+50+400=1050・・・(3)
したがって、経路探索処理部19は、合計コストが最も小さい経路「a−d−g−h」を、推奨経路探索機能による探索経路として決定する。
合計道路長=200+600+300=1100・・・(4)
同様に、経路「a−c−f−h」の合計道路長は、以下の式(5)で求められる。
合計道路長=200+300+400=900・・・(5)
また、経路「a−d−g−h」の合計道路長は、以下の式(6)で求められる。
合計道路長=300+500+200=1000・・・(6)
したがって、経路探索処理部19は、合計道路長が最も小さい経路「a−c−f−h」を、距離優先探索機能による探索経路として決定する。
合計コスト=300*0.8+50+500*0.64+0+300*0.8=850・・・(7)
同様に、経路「a−c−f−h」の合計コストは、以下の式(8)で求められる。
合計コスト=200+100+400*0.8+100+300=1020・・・(8)
また、経路「a−d−g−h」の合計コストは、以下の式(9)で求められる。
合計コスト=200*0.8+0+400+50+400=1010・・・(9)
したがって、経路探索処理部19は、合計コストが最も小さい経路「a−b−e−h」を、高精度優先経路探索機能による探索経路として決定する。以上のような経路探索処理を行うことにより、自車位置を高精度に特定することが可能な道路を優先的に通るような経路を探索することができる。
次に、本実施形態に係るナビゲーション装置1において実行される経路探索処理の手順について説明する。図13は、本実施形態に係る経路探索処理の手順を示すフローチャートである。以下に説明する処理の手順は、上記の各機能部を構成するハードウェア又はソフトウェア(プログラム)或いはその両方により実行される。上記の各機能部がプログラムにより構成される場合には、ナビゲーション装置1が有する演算処理装置が、上記の各機能部を構成するナビゲーションプログラムを実行するコンピュータとして動作する。以下、フローチャートに従って説明する。
(1)上記の実施形態においては、高精度リンクkhが、自車両Cの進行方向の位置を高精度に特定できる可能性がある高精度リンクkh、自車両Cの走行レーンを高精度に特定できる可能性がある高精度リンクkh、及びそれらの双方を高精度に特定できる可能性がある高精度リンクkhの3種類のいずれであるかを判定し、それぞれについて予め定められた高精度補正係数Aの値を用いる場合を例として説明した。しかし、本発明の実施形態はこれに限定されるものではない。したがって、例えば、各道路リンクkについて個別に、予め定めた高精度補正係数Aの値を用いることも、本発明の好適な実施形態の一つである。この場合、高精度補正係数Aの値は、各道路リンクkに個別の値を設定することができるので、各道路リンクkを走行する際に自車両Cの位置を高精度に特定できる可能性に応じて適切な値を設定することが可能となる。また、このような高精度補正係数Aの情報は、各道路リンクkに個別情報となるので、例えば各道路リンクkのリンク属性情報として地図データベースDB1に記憶させた構成とすると好適である。
19:経路探索処理部(経路探索手段)
24:外部情報受信部(情報受信手段)
29:自車位置特定手段
C:自車両
R:道路情報
k:道路リンク
n:交差点ノード
CL:基本リンクコスト
CN:ノードコスト
L:道路長
A:高精度補正係数
DB2:地物データベース
F:地物情報
G:画像情報
Claims (13)
- GPS情報に少なくとも基づいて自車両の位置を推定する自車位置推定手段と、複数の道路リンクの接続関係により道路ネットワークを表す道路情報に基づいて出発地から目的地までの経路を探索する経路探索手段と、を備えたナビゲーション装置であって、
地物の位置情報及び属性情報を含む地物情報を記憶した地物データベースを参照し、自車両の周辺を撮影した画像情報に含まれる地物の画像認識結果と前記地物情報とを照合して自車両の位置を高精度に特定する自車位置特定手段を更に備え、
前記地物データベースに記憶された地物情報に基づいて、前記自車位置特定手段による道路に沿った方向における自車両の位置の特定に用いることができる地物及び自車両の走行レーンの特定に用いることができる地物の一方又は双方が存在する道路リンクを、前記自車位置推定手段による自車両の推定位置よりも自車両の位置を高精度に特定できる可能性がある道路リンクである高精度リンクとし、
前記経路探索手段は、各道路リンクに設定されるリンクコストに基づいて前記経路の全体での合計コストが最小となるように経路探索を行う際に、前記高精度リンクのリンクコストを他の道路リンクよりも相対的に小さく設定する高精度優先経路探索機能を備えるナビゲーション装置。 - GPS情報に少なくとも基づいて自車両の位置を推定する自車位置推定手段と、複数の道路リンクの接続関係により道路ネットワークを表す道路情報に基づいて出発地から目的地までの経路を探索する経路探索手段と、を備えたナビゲーション装置であって、
道路に沿った方向における自車両の位置及び自車両の走行レーンの一方又は双方の特定に用いることができる特定情報を自車両の外部から受信する情報受信手段を更に備え、
前記特定情報を受信可能な道路リンクを、前記自車位置推定手段による自車両の推定位置よりも自車両の位置を高精度に特定できる可能性がある道路リンクである高精度リンクとし、
前記経路探索手段は、各道路リンクに設定されるリンクコストに基づいて前記経路の全体での合計コストが最小となるように経路探索を行う際に、前記高精度リンクのリンクコストを他の道路リンクよりも相対的に小さく設定する高精度優先経路探索機能を備えるナビゲーション装置。 - 前記経路探索手段は、前記高精度優先経路探索機能を実行する際に、前記高精度リンクに設定される値が、前記高精度リンク以外の道路リンクに設定される値よりも小さい高精度補正係数を用い、各道路リンクに予め設定された基本リンクコストに対して前記高精度補正係数を乗算した結果を、前記リンクコストとして用いて経路探索を行う請求項1又は2に記載のナビゲーション装置。
- 前記高精度補正係数は、道路に沿った方向における自車両の位置を高精度に特定できる可能性がある道路リンクに設定される値と、自車両の走行レーンを高精度に特定できる可能性がある道路リンクに設定される値と、道路に沿った方向における自車両の位置及び自車両の走行レーンの双方を高精度に特定できる可能性がある道路リンクに設定される値と、が予め定められている請求項3に記載のナビゲーション装置。
- 前記高精度補正係数は、各道路リンクを走行する際に自車両の位置を高精度に特定できる可能性に応じて、各道路リンクについて予め定められている請求項3に記載のナビゲーション装置。
- 前記高精度補正係数は、自車両の位置を高精度に特定できる可能性が高くなるに従って小さい値となるように設定される請求項3から5のいずれか一項に記載のナビゲーション装置。
- 前記基本リンクコストは、各道路リンクの道路長及び道路属性に応じて設定される請求項3から6のいずれか一項に記載のナビゲーション装置。
- 前記経路探索手段は、前記高精度優先経路探索機能を実行する際に、前記高精度リンクに設定される値が、前記高精度リンク以外の道路リンクに設定される値よりも大きい高精度補正係数を用い、各道路リンクに予め設定された基本リンクコストから前記高精度補正係数を引算した結果、又は前記高精度リンクに設定される値が、前記高精度リンク以外の道路リンクに設定される値よりも小さい高精度補正係数を用い、各道路リンクに予め設定された基本リンクコストに前記高精度補正係数を加算した結果を、前記リンクコストとして用いて経路探索を行う請求項1又は2に記載のナビゲーション装置。
- 前記経路探索手段は、前記高精度優先経路探索機能を実行する際に、前記高精度リンクについて、各道路リンクに予め設定された基本リンクコストよりも小さい値に設定された高精度優先用リンクコストを、前記リンクコストとして用いて経路探索を行う請求項1又は2に記載のナビゲーション装置。
- 前記経路探索手段は、前記リンクコストに加えて、各交差点ノードに設定されるノードコストに基づいて、前記経路の全体での合計コストが最小となるように経路探索を行う請求項1から9のいずれか一項に記載のナビゲーション装置。
- 前記経路探索手段は、前記高精度優先経路探索機能に加えて、当該高精度優先経路探索機能とは異なる条件により経路探索を行う一又は二以上の経路探索機能を選択可能に備えている請求項1から10のいずれか一項に記載のナビゲーション装置。
- GPS情報に少なくとも基づいて自車両の位置を推定する自車位置推定機能と、複数の道路リンクの接続関係により道路ネットワークを表す道路情報に基づいて出発地から目的地までの経路を探索する経路探索機能と、をコンピュータに実現させるためのナビゲーションプログラムであって、
地物の位置情報及び属性情報を含む地物情報を記憶した地物データベースを参照し、自車両の周辺を撮影した画像情報に含まれる地物の画像認識結果と前記地物情報とを照合して自車両の位置を高精度に特定する自車位置特定機能を実現可能に更に備え、
前記地物データベースに記憶された地物情報に基づいて、前記自車位置特定機能による道路に沿った方向における自車両の位置の特定に用いることができる地物及び自車両の走行レーンの特定に用いることができる地物の一方又は双方が存在する道路リンクを、前記自車位置推定機能による自車両の推定位置よりも自車両の位置を高精度に特定できる可能性がある道路リンクである高精度リンクとし、
各道路リンクに設定されるリンクコストに基づいて前記経路の全体での合計コストが最小となるように経路探索を行う際に、前記高精度リンクのリンクコストを他の道路リンクよりも相対的に小さく設定する高精度優先経路探索機能をコンピュータに実現させるためのナビゲーションプログラム。 - GPS情報に少なくとも基づいて自車両の位置を推定する自車位置推定機能と、複数の道路リンクの接続関係により道路ネットワークを表す道路情報に基づいて出発地から目的地までの経路を探索する経路探索機能と、をコンピュータに実現させるためのナビゲーションプログラムであって、
道路に沿った方向における自車両の位置及び自車両の走行レーンの一方又は双方の特定に用いることができる特定情報を自車両の外部から受信する情報受信機能を実現可能に更に備え、
前記特定情報を受信可能な道路リンクを、前記自車位置推定手段による自車両の推定位置よりも自車両の位置を高精度に特定できる可能性がある道路リンクである高精度リンクとし、
各道路リンクに設定されるリンクコストに基づいて前記経路の全体での合計コストが最小となるように経路探索を行う際に、前記高精度リンクのリンクコストを他の道路リンクよりも相対的に小さく設定する高精度優先経路探索機能をコンピュータに実現させるためのナビゲーションプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007339574A JP4936070B2 (ja) | 2007-12-28 | 2007-12-28 | ナビゲーション装置及びナビゲーションプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007339574A JP4936070B2 (ja) | 2007-12-28 | 2007-12-28 | ナビゲーション装置及びナビゲーションプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009162518A JP2009162518A (ja) | 2009-07-23 |
| JP4936070B2 true JP4936070B2 (ja) | 2012-05-23 |
Family
ID=40965324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007339574A Expired - Fee Related JP4936070B2 (ja) | 2007-12-28 | 2007-12-28 | ナビゲーション装置及びナビゲーションプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4936070B2 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5355443B2 (ja) * | 2010-02-15 | 2013-11-27 | 三菱電機株式会社 | 位置補正システム |
| JP5549468B2 (ja) * | 2010-08-05 | 2014-07-16 | アイシン・エィ・ダブリュ株式会社 | 地物位置取得装置、方法およびプログラム |
| JP6741436B2 (ja) * | 2016-02-10 | 2020-08-19 | 株式会社ゼンリン | 運転支援システム |
| JP6214796B1 (ja) * | 2016-03-30 | 2017-10-18 | 三菱電機株式会社 | 走行計画生成装置、走行計画生成方法及び走行計画生成プログラム |
| CN108303103B (zh) | 2017-02-07 | 2020-02-07 | 腾讯科技(深圳)有限公司 | 目标车道的确定方法和装置 |
| JP6915194B2 (ja) * | 2017-08-25 | 2021-08-04 | 株式会社アイシン | 経路探索システムおよび経路探索プログラム |
| DE102019007861B4 (de) * | 2019-11-13 | 2025-10-02 | Mercedes-Benz Group AG | Verfahren zur Freigabe einer Fahrstrecke |
| JP7575345B2 (ja) * | 2021-05-24 | 2024-10-29 | アルプスアルパイン株式会社 | ナビゲーション装置、地図データ編集装置および経路探索方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3598601B2 (ja) * | 1995-08-23 | 2004-12-08 | 神鋼電機株式会社 | 無人車の運行管理システム |
| JP3928537B2 (ja) * | 2002-10-07 | 2007-06-13 | 株式会社デンソー | カーナビゲーション装置 |
| JP4369376B2 (ja) * | 2005-01-19 | 2009-11-18 | 株式会社ケンウッド | 案内経路生成装置、ナビゲーションシステムおよび案内経路生成方法 |
-
2007
- 2007-12-28 JP JP2007339574A patent/JP4936070B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009162518A (ja) | 2009-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8346473B2 (en) | Lane determining device, lane determining method and navigation apparatus using the same | |
| JP4861850B2 (ja) | レーン判定装置及びレーン判定方法 | |
| EP2442072B1 (en) | Route search device and route search method | |
| JP4936070B2 (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| EP2096411A2 (en) | Navigation apparatus and navigation program | |
| CN101103250B (zh) | 导航装置 | |
| US11170138B2 (en) | Geographic position calculation for sign placement based on destination profiling of probe data | |
| JP2006512587A (ja) | マーク付き迂回路を使用する交通障害周辺のルート計算法 | |
| JP2009008590A (ja) | 自車位置認識装置及び自車位置認識プログラム | |
| JP2008299650A (ja) | 地物抽出方法、並びにそれを用いた画像認識方法及び地物データベース作成方法 | |
| WO2007122927A1 (ja) | 位置登録装置、位置登録方法、位置登録プログラムおよび記録媒体 | |
| JP2004198209A (ja) | ナビゲーション装置並びに該装置用プログラム及び記録媒体 | |
| JP4953012B2 (ja) | 画像認識装置と画像認識装置のためのプログラム、及びこれを用いたナビゲーション装置とナビゲーション装置のためのプログラム | |
| US20200363217A1 (en) | Systems, methods, and a computer program product for updating map data | |
| US8494769B2 (en) | Information system, terminal device, and information center device | |
| JP2004226341A (ja) | マップマッチング方法 | |
| WO2007105519A1 (ja) | 位置登録装置、経路探索装置、位置登録方法、位置登録プログラムおよび記録媒体 | |
| JP2009042186A (ja) | ナビゲーション装置、サーバ、及びナビゲーションプログラム | |
| JP4953015B2 (ja) | 自車位置認識装置と自車位置認識プログラム、及びこれを用いたナビゲーション装置 | |
| EP2317282B1 (en) | Map display device and map display method | |
| JP5071737B2 (ja) | レーン判定装置及びレーン判定プログラム、並びにそれを用いたナビゲーション装置 | |
| JP2007155392A (ja) | 地図表示装置、ナビゲーションシステム及び地図表示方法 | |
| JP2009058430A (ja) | ナビゲーション装置及びナビゲーションプログラム | |
| JP2009150695A (ja) | 合流地点決定システム、合流地点決定方法、合流地点決定プログラム | |
| JP4817993B2 (ja) | ナビゲーション装置および誘導経路設定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100311 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100311 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110818 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110825 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111017 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111102 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120126 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120208 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4936070 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |