WO2016129233A1 - 車両用表示制御装置及び車両用表示制御方法 - Google Patents
車両用表示制御装置及び車両用表示制御方法 Download PDFInfo
- Publication number
- WO2016129233A1 WO2016129233A1 PCT/JP2016/000488 JP2016000488W WO2016129233A1 WO 2016129233 A1 WO2016129233 A1 WO 2016129233A1 JP 2016000488 W JP2016000488 W JP 2016000488W WO 2016129233 A1 WO2016129233 A1 WO 2016129233A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- display
- opening
- vehicle
- area
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 15
- 238000001514 detection method Methods 0.000 claims abstract description 128
- 230000004044 response Effects 0.000 claims description 3
- 238000005562 fading Methods 0.000 claims 1
- 230000015654 memory Effects 0.000 description 26
- 230000004048 modification Effects 0.000 description 25
- 238000012986 modification Methods 0.000 description 25
- 230000006870 function Effects 0.000 description 19
- 230000004913 activation Effects 0.000 description 11
- 230000009467 reduction Effects 0.000 description 9
- 238000009434 installation Methods 0.000 description 7
- 238000012544 monitoring process Methods 0.000 description 7
- 239000000446 fuel Substances 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 230000001186 cumulative effect Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 2
- 239000000498 cooling water Substances 0.000 description 2
- 238000011160 research Methods 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/93—Sonar systems specially adapted for specific applications for anti-collision purposes
- G01S15/931—Sonar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/04—Display arrangements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/14—Digital output to display device ; Cooperation and interconnection of the display device with other functional units
- G06F3/1423—Digital output to display device ; Cooperation and interconnection of the display device with other functional units controlling a plurality of local displays, e.g. CRT and flat panel display
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/90—Arrangement of cameras or camera modules, e.g. multiple cameras in TV studios or sports stadiums
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
- B60R2001/1253—Mirror assemblies combined with other articles, e.g. clocks with cameras, video cameras or video screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/301—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing combining image information with other obstacle sensor information, e.g. using RADAR/LIDAR/SONAR sensors for estimating risk of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/802—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views
- B60R2300/8026—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views in addition to a rear-view mirror system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8033—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for pedestrian protection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/804—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for lane monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8066—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring rearward traffic
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/60—Editing figures and text; Combining figures or text
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0116—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from roadside infrastructure, e.g. beacons
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/042—Detecting movement of traffic to be counted or controlled using inductive or magnetic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
Definitions
- the present disclosure relates to a vehicle display control device and a vehicle display control method.
- vehicle display control technology for controlling display on a display unit mounted on the host vehicle is widely known.
- an opening image is displayed on the display unit during the opening period when the opening command is detected by detecting the opening command from the user for the host vehicle. I am letting.
- the opening image displayed on the display unit is for performing an effect that welcomes the user, and is stored in advance in the image storage unit so that it is read and displayed during the opening period. .
- an obstacle in the outside world is detected by a plurality of outside sensors mounted on the own vehicle, and a notification according to the distance of the obstacle from the own vehicle is sounded. It is realized by the change of. According to such notification, it is possible to enhance the effect of reducing or avoiding the collision damage targeted by the safety system using these external sensors, and to ensure the safety and security of the user.
- the present inventor supports the user's understanding of the functions, capabilities, and limitations of each external sensor by displaying sensor information regarding each external sensor as the opening period display as disclosed in Patent Document 1. We have conducted extensive research on the technology to do this.
- the present disclosure was created as a result of such earnest research, and the purpose of the present disclosure is to reduce the collision damage by supporting the user's understanding of each external sensor in the own vehicle on which a plurality of external sensors are mounted.
- the object is to provide a vehicle display control device and a vehicle display control method that contribute to avoidance.
- a display control device for a vehicle is a sensor information display unit related to each external sensor in a host vehicle equipped with a plurality of external sensors that detect obstacles in the external environment and a display unit that displays information.
- Display control device for controlling the display of the vehicle, an opening detection unit for detecting an opening command from the user to the host vehicle, a host vehicle image showing the host vehicle, and a detection area capable of detecting an obstacle for each external sensor
- a plurality of area images associated with the vehicle image and an image storage unit for storing the vehicle image and each area image from the image storage unit during the opening period when the opening command is detected by the opening detection unit
- An opening control unit that reads and displays the images as sensor information on the display unit.
- a vehicle display control method includes a sensor information display unit for each external sensor in a host vehicle equipped with a plurality of external sensors for detecting obstacles in the external environment and a display unit for displaying information.
- the opening command from the user for the host vehicle is detected, and the host vehicle image indicating the host vehicle and an obstacle for each external sensor are detected during the opening period when the opening command is detected.
- the vehicle image and each area image are read out from the stored image storage unit including a plurality of area images indicating the detection areas where objects can be detected in association with the vehicle image, and these images are read as sensor information on the display unit. Including displaying.
- an image read from the image storage unit is displayed on the display unit as sensor information during the opening period when an opening command from the user to the host vehicle is detected.
- the image displayed at this time is obtained by associating an area image indicating a detection area where an obstacle can be detected for each external sensor with a host vehicle image indicating the host vehicle. Therefore, the user can intuitively grasp and understand the function, performance, and limit of each external sensor from the display of the area image for each external sensor associated with the host vehicle image. According to this, since the user's understanding regarding each external sensor can be supported, it is possible to contribute to the reduction or avoidance of collision damage.
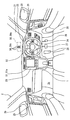
- FIG. 1 is an interior view showing an interior of a host vehicle equipped with a travel assist system according to a first embodiment of the present disclosure.
- FIG. 2 is a block diagram showing the driving assist system according to the first embodiment.
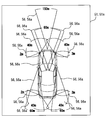
- FIG. 3 is a schematic top view for explaining the plurality of external sensors in FIG.
- FIG. 4 is a front view showing a display state by the HUD of FIG.
- FIG. 5 is a front view showing a display state by the HUD of FIG.
- FIG. 6 is a front view showing a display state by the MFD of FIG.
- FIG. 7A is a schematic front view for explaining the display by the MFD of FIG.
- FIG. 1 is an interior view showing an interior of a host vehicle equipped with a travel assist system according to a first embodiment of the present disclosure.
- FIG. 2 is a block diagram showing the driving assist system according to the first embodiment.
- FIG. 3 is a schematic top view for explaining the plurality of external sensors in FIG.
- FIG. 4 is a front view showing
- FIG. 7B is a schematic front view for explaining display by MFD, following FIG. 7A.
- FIG. 7C is a schematic front view for explaining display by MFD, following FIG. 7B.
- FIG. 7D is a schematic front view for explaining display by MFD, following FIG. 7C.
- FIG. 8 is a front view showing a display state by the MFD of FIG.
- FIG. 9 is a front view showing a display state by the MFD of FIG.
- FIG. 10 is a front view showing a display state by the MFD of FIG.
- FIG. 11 is a block diagram showing a plurality of blocks constructed by the HCU of FIG.
- FIG. 12 is a flowchart showing a vehicle display control flow by the HCU of FIG. FIG.
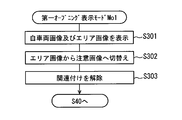
- FIG. 13 is a flowchart showing the first opening display mode according to S30 of FIGS. 7A to 7D.
- FIG. 14A is a schematic front view for explaining display by MFD according to the second embodiment of the present disclosure
- FIG. 14B is a schematic front view for explaining the display by MFD, following FIG. 14A.
- FIG. 14C is a schematic front view for explaining display by MFD, following FIG. 14B.
- FIG. 15A is a schematic front view for explaining display by MFD according to the third embodiment of the present disclosure
- FIG. 15B is a schematic front view for explaining display by MFD, following FIG. 15A.
- FIG. 15C is a schematic front view for explaining display by MFD, following FIG. 15B.
- FIG. 15D is a schematic front view for explaining display by MFD, following FIG.
- FIG. 16 is a block diagram illustrating a plurality of blocks constructed by the HCU according to the fourth embodiment of the present disclosure.
- FIG. 17 is a flowchart showing a vehicle display control flow by the HCU of FIG.
- FIG. 18 is a flowchart showing the first opening display mode in S4030 of FIG.
- FIG. 19 is a front view showing a modification of the display state shown in FIG. 20 is an interior view showing a modified example of the interior of the host vehicle shown in FIG.
- FIG. 21 is a block diagram showing a modification of the travel assist system shown in FIG.
- a travel assist system (ASSIST) 1 according to a first embodiment to which the present disclosure is applied is mounted on a host vehicle (VH) 2 as shown in FIGS.
- VH host vehicle
- the speed at which the host vehicle 2 travels is referred to as a vehicle speed
- the road on which the host vehicle 2 travels is referred to as a travel path
- the vehicle speed limited to the host vehicle 2 on the travel path is referred to as a limit speed.
- the travel assist system 1 includes a periphery monitoring system (MONITOR) 3, a vehicle control system (CONTROL) 4, and an information presentation system (INFO PROVIDE) 5.
- the systems 3, 4, and 5 of the travel assist system 1 are connected via an in-vehicle network 6 such as a LAN (Local Area Network).
- LAN Local Area Network
- the periphery monitoring system 3 includes an external sensor 30 and a periphery monitoring ECU (Electronic Control Unit) 31.
- the outside sensor 30 detects obstacles that exist in the outside of the host vehicle 2 and may collide, such as other vehicles, artificial structures, humans and animals, and traffic indications in the outside.
- sonars 301 and 302 As the external sensor 30, sonars 301 and 302, radars 303, 304, and 305 and cameras 306 and 307 are mounted on the host vehicle 2.
- the front side sonar 301 is an ultrasonic sensor installed on each of the left and right sides of the front portion of the vehicle 2.
- Each front side sonar 301 receives the reflected wave of the ultrasonic wave transmitted to the front side detection area 301a in the outside of the host vehicle 2, thereby detecting an obstacle in the area 301a and outputting a detection signal.
- the detection area 301a that can be detected by each front side sonar 301 is set with a maximum detection distance Ds of, for example, about 2 m as a distance from the installation location of the sonar 301 in the own vehicle 2.
- the rear side sonar 302 is an ultrasonic sensor that is installed on each of the left and right sides of the rear portion of the vehicle 2. Each rear side sonar 302 detects the obstacle in the area 302a by receiving the reflected wave of the ultrasonic wave transmitted to the detection area 302a on the rear side of the outside of the host vehicle 2, and detects the detection signal. Is output.
- the detection area 302a that can be detected by each rear side sonar 302 is set with a maximum detection distance Ds of, for example, about 2 m as a distance from the installation location of the sonar 302 in the own vehicle 2.
- the front short-range millimeter-wave radar 303 is a millimeter-wave sensor installed on each of the left and right sides of the front portion of the vehicle 2.
- Each near-field millimeter wave radar 303 detects an obstacle in the area 303a by receiving a millimeter wave or quasi-millimeter reflected wave transmitted to the front detection area 303a in the external environment of the host vehicle 2. And outputs a detection signal.
- the detection area 303a that can be detected by each forward short-range millimeter wave radar 303 is set with a maximum detection distance Drs of, for example, about 40 m as a distance from the installation location of the radar 303 in the own vehicle 2. .
- the rear short-range millimeter-wave radar 304 is a millimeter-wave sensor installed on each of the left and right sides of the rear portion of the vehicle 2. Each rear short-range millimeter-wave radar 304 detects the obstacle in the area 304a by receiving the reflected millimeter wave or quasi-millimeter wave transmitted to the rear detection area 304a in the external environment of the host vehicle 2. And outputs a detection signal.
- the detection area 304a that can be detected by each rear short-range millimeter-wave radar 304 is set with a maximum detection distance Drs of, for example, about 40 m as a distance from the installation location of the radar 304 in the own vehicle 2. .
- the long-distance millimeter-wave radar 305 is a millimeter-wave sensor installed in the center of the front portion of the host vehicle 2.
- the long-distance millimeter-wave radar 305 receives the reflected millimeter wave transmitted to the front detection area 305a in the external environment of the host vehicle 2, thereby detecting an obstacle in the area 305a and outputting a detection signal.
- the detection area 305a that can be detected by the long-range millimeter-wave radar 305 is set with a maximum detection distance Drl of, for example, about 70 to 150 m as the distance from the installation location of the radar 305 in the own vehicle 2. .
- the front camera 306 is a single-lens or compound-eye camera that is installed in a pair in the center mirror in the passenger compartment 2c of the host vehicle 2.
- Each front camera 306 detects an obstacle or traffic display in the area 306a and outputs an image signal by photographing a front detection area 306a in the external world of the host vehicle 2.
- the detection area 306a that can be detected by each front camera 306 is set with a maximum detection distance Dc of, for example, about 50 to 60 m as the distance from the installation location of the camera 306 in the host vehicle 2.
- the rear camera 307 that also functions as an electronic mirror is a monocular or compound eye camera provided on each of the left and right door mirrors 29 (see FIG. 1) of the vehicle 2.
- Each rear camera 307 captures an image of the rear detection area 307a in the external environment of the host vehicle 2, thereby detecting an obstacle in the area 307a and outputting an image signal.
- the detection area 307a that can be detected by each rear camera 307 is set with a maximum detection distance Dc of, for example, about 50 to 60 m as the distance from the installation location of the camera 307 in the host vehicle 2.
- the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307 are collectively referred to as “external sensor 30”.
- the detection areas 301a, 302a, 303a, 304a, 305a, 306a, and 307a of the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307 are collectively referred to as “detection area 30a”.
- the maximum detection distances Ds, Drs, Drl, and Dc of the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307 are collectively referred to as “maximum detection distance D”.
- the maximum detection distance D of the detection area 30a for each external sensor 30 is Ds, Drs, Dc, Drl in order from the shortest, as described above.
- the 2 is composed mainly of a microcomputer having a processor and a memory, and is connected to the external sensor 30 and the in-vehicle network 6.
- the surroundings monitoring ECU 31 uses, for example, sign information such as a speed limit sign, a stop sign, an intersection sign, an entrance / exit guide sign, a tunnel sign and a gradient sign, and lane marking information such as a white line and a yellow line based on an output signal of the external sensor 30. get.
- the periphery monitoring ECU 31 acquires obstacle information such as the type of the obstacle and the relative relationship of the obstacle with respect to the host vehicle 2 based on the output signal of the external sensor 30.
- the distance monitoring ECU 31 acquires the inter-vehicle distance, the inter-vehicle time, the relative speed, the collision prediction time, and the like for the front vehicle as the front obstacle.
- the vehicle control system 4 includes a vehicle state sensor 40, an occupant sensor 41, and a vehicle control ECU 42.
- the vehicle state sensor 40 is connected to the in-vehicle network 6.
- the vehicle state sensor 40 detects the traveling state of the host vehicle 2.
- the vehicle state sensor 40 is, for example, one type or a plurality of types among a vehicle speed sensor, a rotation speed sensor, a fuel sensor, a water temperature sensor, a battery sensor, a radio wave receiver, and the like.
- the vehicle speed sensor detects the vehicle speed of the host vehicle 2 and outputs a vehicle speed signal corresponding to the detection.
- the rotation speed sensor detects the engine rotation speed in the host vehicle 2 and outputs a rotation speed signal corresponding to the detection.
- the fuel sensor detects the remaining amount of fuel in the fuel tank of the host vehicle 2 and outputs a fuel signal corresponding to the detection.
- the water temperature sensor detects the cooling water temperature of the internal combustion engine in the host vehicle 2 and outputs a water temperature signal corresponding to the detection.
- a battery sensor outputs the battery signal according to the said detection by detecting the battery remaining charge of the own vehicle 2.
- the radio wave receiver outputs a traffic signal by receiving output radio waves from, for example, a positioning satellite, another vehicle transmitter for vehicle-to-vehicle communication, and a roadside device for road-to-vehicle communication.
- the traffic signal is a signal representing traffic information related to the host vehicle 2 such as a travel position, a travel direction, a travel time, a travel path state, a speed limit, and the like, and the obstacle information.
- the passenger sensor 41 is connected to the in-vehicle network 6.
- the occupant sensor 41 detects the state or operation of a user who has boarded in the passenger compartment 2c of the host vehicle 2 shown in FIG.
- the occupant sensor 41 is, for example, one type or a plurality of types among a power switch, a user state monitor, a seating sensor, a door sensor, a display setting switch, a light switch, a turn switch, and the like.
- the power switch is turned on by the user in the passenger compartment 2c to start the internal combustion engine or the electric motor of the host vehicle 2, and outputs a power signal corresponding to the operation.
- the user state monitor captures the user state on the driver's seat 20 in the passenger compartment 2c with an image sensor, thereby detecting the user state and outputting an image signal.
- the seating sensor outputs a seating signal corresponding to the detection by detecting the user's seating operation on the driver's seat 20 in the passenger compartment 2c.
- a door sensor outputs the door signal according to the said detection by detecting opening operation by the user from the vehicle interior 2c in the door 25 by the side of the driver's seat 20 among the own vehicles 2.
- the display setting switch is operated by the user to set the display state in the passenger compartment 2c and outputs a display setting signal corresponding to the operation.
- the light switch is turned on by the user in the passenger compartment 2c to turn on various lights of the host vehicle 2, and outputs a light signal corresponding to the operation.
- the turn switch is turned on by the user in the passenger compartment 2c to operate the direction indicator of the host vehicle 2, and outputs a turn signal corresponding to the operation.
- the vehicle control ECU 42 shown in FIG. 2 is mainly composed of a microcomputer having a processor and a memory, and is connected to the in-vehicle network 6.
- the vehicle control ECU 42 is one type or a plurality of types including at least an integrated control ECU among an engine control ECU, a motor control ECU, a brake control ECU, an integrated control ECU, and the like.
- the engine control ECU accelerates or decelerates the vehicle speed of the host vehicle 2 by controlling the operation of the throttle actuator and the fuel injection valve of the engine according to the operation of the accelerator pedal 26 (see FIG. 1) or automatically.
- the motor control ECU accelerates or decelerates the vehicle speed of the host vehicle 2 by controlling the operation of the motor generator according to the operation of the accelerator pedal 26 or automatically.
- the brake control ECU accelerates or decelerates the vehicle speed of the host vehicle 2 by controlling the operation of the brake actuator according to the operation of the brake pedal 27 (see FIG. 1) or automatically.
- the integrated control ECU synchronously controls the operation of the other control ECU based on, for example, the output signals of the sensors 40 and 41, the acquired information in the periphery monitoring ECU 31, the control information in the other control ECU as the vehicle control ECU 42, and the like.
- the integrated control ECU of the present embodiment automatically reduces the collision damage of the host vehicle 2 against a front obstacle such as a forward vehicle traveling in the same direction by giving a control command to another control ECU as the vehicle control ECU 42 or Operates to avoid.
- the integrated control ECU forcibly and automatically decelerates the vehicle speed of the host vehicle 2 to realize collision damage reduction braking (AEB: Autonomous Emergency Braking) when the emergency control condition is satisfied.
- AEB Autonomous Emergency Braking
- the emergency control condition of the AEB is that the predicted time of collision of the host vehicle 2 with respect to the preceding vehicle approaches, for example, 5 seconds or less.
- the information presentation system 5 is a combination of an acoustic unit 5s, a vibration unit 5v, and a display unit 5d.
- the acoustic unit 5s is mounted on the host vehicle 2 in order to present information in an auditory manner.
- the acoustic unit 5s is mainly composed of a speaker and a sound source circuit, and is connected to the in-vehicle network 6.
- the acoustic unit 5s is installed, for example, in one or a plurality of locations among the driver's seat 20, the instrument panel 22, and the door 25 in the passenger compartment 2c of the host vehicle 2 shown in FIG. A perceptible sound wave or sound is generated.
- the vibration unit 5v shown in FIG. 2 is mounted on the host vehicle 2 for tactile presentation of information.
- the vibration unit 5v is mainly composed of a vibration actuator, and is connected to the in-vehicle network 6.
- the vibration unit 5v is installed, for example, in one or a plurality of locations of the driver's seat 20, the steering handle 24, the accelerator pedal 26, the brake pedal 27, and the footrest 28 in the passenger compartment 2c shown in FIG. An alarm vibration that can be perceived by the user is generated.
- the display unit 5d shown in FIG. 2 is mounted on the host vehicle 2 for visually presenting information.
- the display unit 5d includes a HUD (Head-up Display) 50, an MFD (Multi Function Display) 51, a combination meter 52, and an HCU (HMI (Human Machine Interface) Control Unit) 54.
- HUD Head-up Display
- MFD Multi Function Display
- HCU HMI (Human Machine Interface) Control Unit
- the HUD 50 is installed on the instrument panel 22 in the passenger compartment 2c shown in FIG.
- the HUD 50 projects the image 56 formed so as to show predetermined information on the liquid crystal panel or the projection screen onto the windshield 21 of the host vehicle 2 so that the virtual image of the image 56 can be visually recognized by the user on the driver's seat 20. indicate.
- the virtual image display by the HUD 50 is visually recognized by the user in the display area 50a having a predetermined area that is the projection range of the image 56 on the windshield 21 and overlapping with the outside scene in front of the host vehicle 2.
- the display of the caution image 56c and the notification image 56i as shown in FIGS.
- the virtual image display by the HUD 50 in addition to the images 56c and 56i, for example, an image display indicating one type or a plurality of types of information among navigation information, sign information, obstacle information, and the like may be adopted.
- an image display indicating one type or a plurality of types of information among navigation information, sign information, obstacle information, and the like may be adopted.
- a virtual image display can also be realized by projecting the image 56 on the combiner.
- the navigation information can be acquired based on the map information stored in the memory 54m and the output signal of the sensor 40, for example, in the HCU 54 described in detail later.
- the MFD 51 is installed in the center console 23 in the passenger compartment 2c shown in FIG.
- the MFD 51 displays a real image of the image 56 formed so as to show predetermined information on one or a plurality of liquid crystal panels so that the user on the driver's seat 20 can visually recognize the image.
- the real image display by the MFD 51 is visually recognized by the user in the display range 51 a having a larger area than the display range 50 a of the HUD 50.
- the display of the host vehicle image 56s, the area image 56a, the caution image 56c, and the notification image 56i as shown in FIGS. 4 to 10 is employed.
- the real image display by the MFD 51 employs an image display that shows one or more types of information among navigation information, audio information, video information, communication information, and the like. May be.
- the combination meter 52 is installed on the instrument panel 22 in the passenger compartment 2c shown in FIG.
- the combination meter 52 displays vehicle information related to the host vehicle 2 so that the user on the driver's seat 20 can visually recognize the vehicle information.
- the combination meter 52 is a digital meter that displays vehicle information by an image formed on a liquid crystal panel, or an analog meter that displays vehicle information by indicating a scale with a pointer.
- As the display by the combination meter 52 for example, one type or plural types of vehicle speed, engine speed, fuel remaining amount, cooling water temperature, battery remaining amount, operation state of the light switch, turn switch and door 25, etc. A display showing information is adopted.
- the HCU 54 is mainly composed of a microcomputer having a processor 54p and a memory 54m, and is connected to the display elements 50, 51, 52 and the in-vehicle network 6 of the display unit 5d.
- the HCU 54 controls the operations of the acoustic unit 5s and the vibration unit 5v and the operations of the display elements 50, 51, and 52 of the display unit 5d in synchronization.
- the HCU 54 controls the operation thereof based on, for example, output signals of the sensors 40 and 41, acquisition information in the ECU 31, control information in the ECU 42, storage information in the memory 54m, and acquisition information including time information of the HCU 54 itself.
- the memory 54m of the HCU 54 and the memories of other various ECUs are respectively configured by using one or a plurality of storage media such as a semiconductor memory, a magnetic medium, or an optical medium.
- the images 56s, 56a, 56c, and 56i are stored as data in the memory 54m as the “image storage unit”, so that the HCU 54 functions as a “vehicle display control device”. With this function, the HCU 54 controls the virtual image display of the images 56c and 56i on the HUD 50 and the real image display of the images 56s, 56a, 56c and 56i on the MFD 51 as sensor information display regarding each external sensor 30. This will be described below.
- the “image storage unit” for storing the images 56s, 56a, 56c, and 56i is selected from any of the memories of the built-in ECU of the display elements 50, 51, and 52, or of these memories and the memory 54m of the HCU 54. Of course, it may be realized by jointly using a plurality of memories.
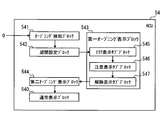
- the HCU 54 functionally constructs a plurality of blocks 541, 542, 543, 544, and 540 as shown in FIG. 11 by executing the vehicle display control program stored in the memory 54m by the processor 54p.
- these blocks 541, 542, 543, 544, and 540 may be constructed by hardware using one or a plurality of ICs.
- the opening detection block 541 as an “opening detection unit” detects an opening command O from the user to the host vehicle 2.
- the opening command O refers to a user's intention to start driving the host vehicle 2 and is detected based on an output signal of the occupant sensor 41.
- Such opening command O is detected based on, for example, an ON operation detected based on a power signal of a power switch, an opening operation detected based on a door signal of a door sensor, and a seating signal of a seating sensor or an image signal of a user status monitor.
- the seating operation is adopted.
- the period setting block 542 as the “opening control unit” sets the opening period Po (see FIG. 12) after the opening command O is detected by the opening detection block 541.
- the opening period Po is started immediately after the opening command O is detected or after a set time from the detection of the opening command O.
- the time length after the start of the opening period Po is displayed on display blocks 543 and 544, which will be described in detail later, so that the user on the driver's seat 20 can view the images 56s, 56a, 56c, and 56i. For example, it is set to about 5 to 10 seconds according to the control content.
- the display blocks 543 and 544 as the “opening control unit” sequentially execute the individual opening display modes Mo1 and Mo2 (see FIG. 12), respectively.
- the first opening display block 543 is composed of a plurality of sub-blocks 545, 546, 547.
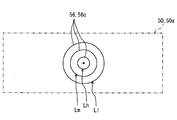
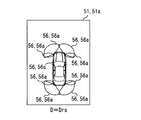
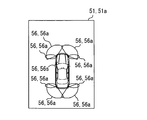
- the area display sub-block 545 reads the host vehicle image 56s and the plurality of area images 56a from the memory 54m and displays them on the MFD 51 as shown in FIG.
- the host vehicle image 56 s at this time is a graphic image schematically showing the top view shape of the host vehicle 2.
- each area image 56a at this time is a graphic image schematically showing a corresponding area in the detection area 30a (see FIG. 3) for each external sensor 30.
- the display colors of these area images 56a may be the same as each other or different from each other.
- the separation distance from the own vehicle image 56s to the most distant portion is an index that visually represents the maximum detection distance D (see FIG. 3) of the corresponding detection area 30a.
- the ratio of the separation distances to the part farthest from the host vehicle image 56 s in the outer peripheral contour line of each area image 56 a is the maximum detection distance D of the corresponding detection area 30 a.
- the ratio between the two is different for convenience of display size.
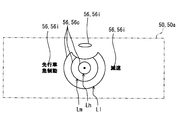
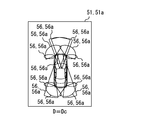
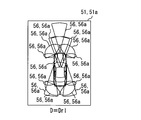
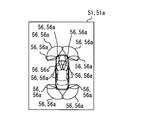
- the area display sub-block 545 sequentially displays each area image 56a on the display range 51a of the MFD 51 in order from the outside sensor 30 side having the shortest maximum detection distance D corresponding to the area image 56a as shown in FIGS. 7A to 7D.
- Ds sonars 301 and 302 shown in FIG. 7A Ds sonars 301 and 302 shown in FIG. 7A
- Drs short-range millimeter wave radars 303 and 304 shown in FIG. 7B Dc cameras 306 and 307 shown in FIG. 7C
- the corresponding area image 56a is superimposed and displayed on the host vehicle image 56s in the order of the long distance millimeter wave radar 305 of Drl.
- the MFD 51 in the display control period by the area display sub-block 545 in the opening period Po all the area images 56a are displayed in association with the host vehicle image 56s as shown in FIG.
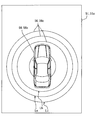
- each of the caution images 56c at this time includes a plurality of cautions corresponding to the risk of depending on the distance of the obstacle from the own vehicle 2 (hereinafter simply referred to as “obstacle distance”) as the driving risk of the own vehicle 2 by the user
- the graphic images schematically show the levels Ll, Lh, and Lm, respectively.
- the caution image 56c indicating the caution level L1 when the driving risk is low is a circular image in which the radius of the outer peripheral outline centering on the host vehicle image 56s is the maximum diameter.
- the caution image 56c indicating the caution level Lh when the driving risk is high is a circular image in which the radius of the outer periphery contour centering on the host vehicle image 56s is the minimum diameter.
- the caution image 56c indicating the caution level Lm when the driving risk is moderate is a circular image in which the radius of the outer peripheral contour centered on the host vehicle image 56s is between the minimum diameter and the maximum diameter.
- the radius of the outer peripheral contour line of each of the attention images 56c is an index that visually associates the obstacle distance from the own vehicle 2 with the detection area 30a shown in FIG. 6 by each area image 56a before switching. .
- the attention levels Ll, Lh, and Lm are collectively referred to as “attention level L”.
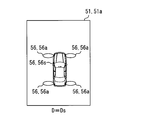
- the caution display sub-block 546 displays each of all the caution images 56c switched from the area image 56a in the display range 51a of the MFD 51 in association with the host vehicle image 56s as shown in FIG.
- the images 56a and 56c are animatedly displayed in the form of moving images in which the respective attention images 56c are faded in at the respective display positions while the respective area images 56a are faded out at the respective display positions.
- the cancellation display sub-block 547 shown in FIG. 11 deletes the vehicle image 56s associated with each caution image 56c in the MFD 51 as shown in FIG. 9 after the display control period by the caution display sub-block 546 in the opening period Po. Then, the association is released. At this time, particularly in the present embodiment, the display of each caution image 56c released from the association with the host vehicle image 56s is concentrically reduced in the display range 51a of the MFD 51. As a result, in the MFD 51 in the display control period by the release display sub-block 547 in the opening period Po, only the caution images 56c are displayed in a reduced state.
- the first opening display mode Mo1 is realized in a series of display control periods by the sub-blocks 545, 546, and 547. Therefore, in the present embodiment, the MFD 51 used in the first opening display mode Mo1 corresponds to the “first opening display unit”.
- the second opening display block 544 shown in FIG. 11 displays the caution images 56c on the MFD 51 to the HUD 50 after the display control period by the release display sub-block 547 in the opening period Po.
- each reduced attention image 56c released from the association with the host vehicle image 56s is displayed in the display range 50a of the HUD 50 in substantially the same size as the display size of the MFD 51.
- each caution image 56c to be moved is erased in the display range 51a of the MFD 51, and a plurality of notification images 56i are read from the memory 54m and displayed in the range 51a.
- the images 56c and 56i may be displayed in animation in the form of moving images in which the respective notification images 56i are faded in at the respective display locations while the respective caution images 56c are faded out at the respective display locations.
- all the notification images 56i may be displayed after the all erasure of the attention image 56c or simultaneously with the all erasure.
- Each notification image 56i at this time indicates the distinction of notification contents (see FIG. 5) notified in association with the attention level of each attention image 56c by the HUD 50 after the opening period Po, which will be described in detail later. Character image.
- one of the notification images 56i indicates that the cause of driving risk corresponding to the attention level L is notified in the factor display area in the display range 51a of the MUD 51 by the character notation of the display area name. It is a character image. Another one of the notification images 56i is a character image indicating that the driving behavior corresponding to the attention level L is notified in the behavior display area in the display range 51a by the character notation of the display area name. Another one of the notification images 56i is a character image indicating that the attention level L to the front obstacle is notified in the front display area of the display range 51a by the character notation of the display area name.
- Yet another one of the notification images 56i is a character image indicating that the attention level L to the rear obstacle is notified in the rear display area of the display range 51a by the character notation of the display area name. Still another one of the notification images 56i is a character image that indicates that the attention level L is notified in the attention level display area in the display range 51a by the character notation of the display area name.
- the boundaries between the display areas corresponding to the respective notification images 56i are virtually indicated by two-dot chain lines.
- the second opening display mode Mo2 is realized in the display control period by the second opening display block 544 in the opening period Po. Therefore, in the present embodiment, the HUD 50 used in the second opening display mode Mo2 corresponds to the “second opening display unit”.
- the display of the caution image 56c on the HUD 50 by the execution of the second opening display mode Mo2 is continued even after the opening period Po ends, but the display of the notification image 56i on the MFD 51 by the execution is performed in the opening period Po. It will be erased upon completion.
- the normal display block 540 shown in FIG. 11 executes the normal display mode Mn (see FIG. 12) after the opening period Po. By executing the normal display mode Mn, the normal display block 540 continues to display each caution image 56c in the caution level display area as shown in FIG. 5 in the display range 50a of the HUD 50, and is selected as necessary.
- the notification image 56i is also displayed in a predetermined area.
- the notification image 56i at this time is a character image or a graphic image in which the notification content itself that is notified in association with the attention level of each attention image 56c is represented by character notation or schematically.
- one of the notification images 56i is a character representation of the driving risk occurrence factor corresponding to the attention level L in the factor display area in the display range 50a of the HUD 50 that has a smaller display area than the display range 51a of the MUD 51. It is a character image shown by.
- Another one of the notification images 56i is a character image that indicates the driving behavior according to the attention level L in a character notation in the behavior display area of the display range 50a.
- Another one of the notification images 56i is an elliptical image that schematically shows the attention level L to the front obstacle in the front display area of the display range 50a.
- Still another one of the notification images 56i is an oval image (not shown) schematically showing the attention level L to the rear obstacle in the rear display area of the display range 50a.
- the normal display block 540 for displaying an elliptical image as the notification image 56i in the front display area or the rear display area is an image corresponding to the attention level L among the attention images 56c displayed in the attention level display area. For example as shown in FIG. As a result, the user can be alerted to the driving risk from the stage before the operation of the AEB.
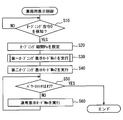
- the vehicle display control flow as the “vehicle display control method” is realized. Details thereof will be described below. Note that “S” in the vehicle display control flow means each step.
- the opening detection block 541 determines whether or not the opening command O from the user for the host vehicle 2 has been detected.
- the opening command O at this time is assumed to be an ON operation of the power switch here.
- S10 is repeated until the opening command O is detected.
- the process proceeds to S20.
- the opening period Po is set by the period setting block 542.
- the first opening display mode Mo1 in the opening period Po is executed by the first opening display block 543.
- the host vehicle image 56s and a plurality of area images 56a associated therewith are read from the memory 54m by the area display sub-block 545 and displayed on the MFD 51.
- the area images 56a are sequentially displayed in order from the outside sensor 30 side where the maximum detection distance D is short.
- the caution display sub-block 546 executes the display on the MFD 51 of each caution image 56c read from the memory 54m by switching from the entire area image 56a.
- the entire area image 56a associated with the own vehicle image 56s is faded out, and the all caution image 56c is associated with the own vehicle image 56s and displayed in animation. It will be.
- the second opening display block 544 executes the second opening display mode Mo2 in the opening period Po in S40 of the vehicle display control flow shown in FIG. Specifically, in the second opening display mode Mo ⁇ b> 2, the display of each caution image 56 c released from the association with the host vehicle image 56 s by the MFD 51 is moved to the HUD 50 by the second opening display block 544. At this time, in the MFD 51 of the present embodiment, each caution image 56c to be moved is deleted and each notification image 56i read from the memory 54m is displayed.
- the normal display block 540 determines whether or not the power switch is turned off in S50. As a result, when the power switch is turned off, the vehicle display control flow is terminated, while when the switch is turned on, the process proceeds to S60.
- the normal display mode Mn is executed by the normal display block 540. Specifically, in the normal display mode Mn, the display of each caution image 56c on the HUD 50 is continued, and the notification image 56i selected as necessary is displayed on the HUD 50. After this, the process returns to S50, whereby the display of each caution image 56c and the display of the notification image 56i as necessary are executed until the power switch is turned off.
- S10 corresponds to an “opening detection step”
- S20, S30, and S40 correspond to an “opening control step”.
- an image read from the memory 54m is displayed on the MFD 51 as sensor information during the opening period Po when the opening command O from the user to the host vehicle 2 is detected.
- the image displayed at this time is obtained by associating the area image 56 a showing the detection area 30 a where the obstacle can be detected for each external sensor 30 with the own vehicle image 56 s showing the own vehicle 2. Therefore, the user can intuitively grasp and understand the function, performance, and limit of each external sensor 30 from the display of the area image 56a for each external sensor 30 associated with the own vehicle image 56s. According to this, since the user's understanding regarding each external sensor 30 can be supported, it is possible to contribute to the reduction or avoidance of collision damage.
- each area image 56a is sequentially displayed in sequence from the external sensor 30 side where the maximum detection distance D of the detection area 30a is short as the distance from the host vehicle 2. Accordingly, the user can intuitively and accurately grasp the maximum detection distance D representing the detection limit for the detection area 30a for each external sensor 30 in order from the shortest, so that the user's understanding of the detection limit can be improved. . Therefore, this is effective in reducing or avoiding collision damage.
- the area image 56a displayed in association with the host vehicle image 56s in the opening period Po is switched to the attention image 56c read from the memory 54m after the association display.
- the user can detect the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after switching, and the detection area 30a for each external sensor 30 corresponding to each area image 56a before switching. It becomes easy to be conscious in connection with. Therefore, the user intuitively understands that an obstacle detected in the detection area 30a by the function of each external sensor 30 requires a level of attention corresponding to the distance from the host vehicle 2. Can do. Therefore, this is effective in reducing or avoiding collision damage.
- the attention image 56c switched from the area image 56a in the opening period Po is displayed in association with the host vehicle image 56s.
- both the area image 56a before the switching and the attention image 56c after the switching are clearly related to the distance from the host vehicle 2 by the association with the common host vehicle image 56s.
- the user grasps the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after switching in association with the detection area 30a corresponding to each area image 56a before switching. It becomes easy. Therefore, for the obstacle detected in the detection area 30a by the function of each external sensor 30, an intuitive understanding level that the level of attention corresponding to the distance from the host vehicle 2 is necessary, It can be enhanced by the user. Therefore, it is particularly effective in contributing to the reduction or avoidance of collision damage.
- the area image 56a fades out at the display location, and the caution image 56c is displayed as an animation that fades in at the same location.
- the area image 56a before switching and the caution image 56c after switching are temporarily superimposed and displayed.
- the user grasps the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after switching in association with the detection area 30a corresponding to each area image 56a before switching. It becomes easy. Therefore, for the obstacle detected in the detection area 30a by the function of each external sensor 30, an intuitive understanding level that the level of attention corresponding to the distance from the host vehicle 2 is necessary, It can be enhanced by the user. Therefore, it is particularly effective in contributing to the reduction or avoidance of collision damage.
- the area image 56a is displayed on the MFD 51 in the display unit 5d after being displayed in association with the host vehicle image 56s. It is switched to 56c. Therefore, the user can easily grasp the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after switching in association with the detection area 30a corresponding to each area image 56a before switching. . Furthermore, during the opening period Po, the display of the caution image 56c on the MFD 51 is moved to the HUD 50 that displays the caution image 56c after the synchronization Po in the display unit 5d by executing the second opening display mode Mo2. .
- the user can associate the attention level L indicated by the attention image 56c in the HUD 50 after the opening period Po with the attention level L indicated by the attention image 56c in the HUD 50 during the synchronization Po. Therefore, the user grasps the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after the opening period Po in association with the detection area 30a corresponding to each area image 56a before switching. It becomes easy to do. According to the above, an intuitive understanding that an obstacle detected in the detection area 30a by the function of each external sensor 30 requires a level of attention corresponding to the distance from the host vehicle 2. The degree can be increased by the user. Therefore, it is particularly effective in contributing to the reduction or avoidance of collision damage.
- the caution image 56c is switched from the area image 56a and displayed in association with the host vehicle image 56s by executing the first opening display mode Mo1 in the opening period Po. Therefore, the user can easily grasp the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c after switching in association with the detection area 30a corresponding to each area image 56a before switching. .
- the vehicle image 56s is erased in the MFD 51 and the association with the caution image 56c is released, and then the second opening display mode Mo2 is executed.
- the attention image 56c whose association has been released is displayed on the HUD 50.
- the attention image 56c is set to an appropriate size in order to associate the driving risk that depends on the obstacle distance with the detection area 30a and correspond to the attention level L. Can be displayed. Therefore, for the obstacle detected in the detection area 30a by the function of each external sensor 30, the level of caution according to the distance from the host vehicle 2 is necessary, and it is difficult to prevent the driving view.
- the HUD 50 of the area it can be continuously conscious until after the opening period Po. Therefore, it is possible to greatly contribute to the reduction or avoidance of collision damage.
- the notification image 56i is displayed on the MFD 51.
- the notification image 56i is read from the memory 54m and displayed in order to show the distinction of the notification content notified in association with the attention image 56c after the opening period Po. Therefore, it is ensured that the user understands that the obstacle detected in the detection area 30a by the function of each external sensor 30 requires a level of caution according to the distance from the vehicle 2. Can be raised. Therefore, it is possible to greatly contribute to the reduction or avoidance of collision damage.
- the second embodiment of the present disclosure is a modification of the first embodiment.
- the area display sub-block 545 displays each area image 56a in order from the outside sensor 30 side in which the activation time T required for activation in response to the opening command O is short.
- the sequence is displayed on the MFD 51. Therefore, in S301 of the vehicle display control flow of the second embodiment, the respective area images 56a are sequentially displayed in order from the outside sensor 30 side with the short activation time T.
- the activation times Ts of the sonars 301 and 302 shown in FIG. 14A are about 1 second, for example, the activation times Tr of the radars 303, 304, and 305 shown in FIG. 14B are about 3 seconds, and the cameras 306 and 307 shown in FIG.
- the activation time Tc is about 5 seconds, for example. Therefore, when the activation times Ts, Tr, and Tc of the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307 are collectively referred to as the above-described “activation time T”, the activation times T are in order from the shortest. Ts, Tr, Tc.
- the corresponding area image 56a is superimposed and displayed on the host vehicle image 56s.
- each area image 56a is displayed in sequence from the external sensor 30 side having a short activation time T in response to the opening command O. Accordingly, the user can intuitively and accurately grasp the activation time T as the performance of each external sensor 30 in order from the shortest one, so that the user's understanding of the performance can be improved. Therefore, this is effective in reducing or avoiding collision damage.
- the third embodiment of the present disclosure is a modification of the first embodiment.
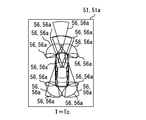
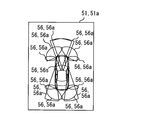
- the area display sub-block 545 displays the animation of each area image 56a in an MFD 51 as a moving image that gradually spreads away from the host vehicle image 56s as shown in FIGS. 15A to 15D. Therefore, in S301 of the vehicle display control flow of the third embodiment, each area image 56a is displayed in animation in a moving image shape that gradually spreads away from the own vehicle image 56s.
- 15A to 15D show the gradually expanding display state in time order for the area image 56a showing the detection areas 306a and 307a corresponding to the cameras 306 and 307 in the external sensor 30, In this case, the spread is smoothly continuous.
- the area image 56a showing the detection areas 301a, 302a, 303a, 304a, and 305a corresponding to the external sensors 30 other than the cameras 306 and 307 also has a display state that gradually increases as shown in FIGS. 15A to 15D. It goes without saying.
- each area image 56a is displayed as an animation that gradually spreads toward the side away from the host vehicle image 56s.
- the user can intuitively understand the range of the detection area 30a spreading toward the side away from the host vehicle 2 as the performance of each external sensor 30, for example, with an image of ultrasonic waves or the like as a detection irradiation wave. Therefore, the user's understanding of the performance can be improved. Therefore, this is effective in reducing or avoiding collision damage.
- the fourth embodiment of the present disclosure is a modification of the first embodiment.
- the HCU 4054 of the fourth embodiment constructs an opening detection block 4541 as an “opening detection unit”.
- the opening detection block 4541 determines the number of times of detection on the same date, in addition to executing detection of the opening command O as in the first embodiment.
- the opening detection block 4541 determines the date when the detection of the opening command O is executed based on one or more of the output signal of the radio wave receiver serving as the occupant sensor 41 and the timing information of the HCU 54.
- the opening detection block 4541 stores or updates the number of detections of the opening command O in the memory 54m on the same date, and resets the number of detections as the date is changed.
- the HCU 4054 constructs a first opening display block 4543 as an “opening detection unit”.
- the opening detection block 4541 determines that the opening command O is detected for the first time on the same date
- the first opening display block 4543 executes the first opening display mode Mo1 during the opening period Po.
- the display control content of 1st opening display mode Mo1 is the same as that of 1st embodiment.
- the HCU 4054 additionally constructs a third opening display block 4548 as an “opening control unit”.
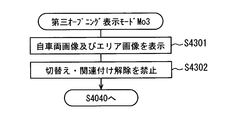
- the third opening display block 4548 displays the third opening display mode Mo3 (see FIG. 17) during the opening period Po.
- the third opening display block 4548 is composed of only the area display sub-block 4545.
- the area display sub-block 4545 reads the vehicle image 56s and the plurality of area images 56a from the memory 54m and displays them on the display range 51a of the MFD 51. .
- the HCU 4054 additionally constructs a fourth opening display block 4549 as an “opening control unit”.
- the fourth opening display block 4549 executes the fourth opening display mode Mo4 (see FIG. 17) after the display control period by the area display sub-block 4545 in the opening period Po.
- the fourth opening display block 4549 displays each caution image 56c in the caution level display area in the display range 50a of the HUD 50.
- the reduced attention images 56c that are no longer associated with the vehicle image 56s are displayed as the display size in the display mode Mo2. It is displayed in the display range 50a of the HUD 50 with substantially the same size.
- the display of the notification image 56i is not executed in the MFD 51 at this time, the display of the images 56s and 56a is completely erased before or after the entire display of the caution image 56c by the HUD 50 or simultaneously with the entire display. May be.
- period setting block 542 the second opening display block 544, and the normal display block 540 constructed by the HCU 4054 are the same as those in the first embodiment.
- the vehicle display control flow is realized as shown in FIGS. The details will be described focusing on the different parts.
- the process proceeds to S4010 after performing S10 and S20 similar to those in the first embodiment.
- the first opening display block 4543 determines the number of times the opening command O is detected on the same date.
- S30 and S40 similar to those of the first embodiment are sequentially executed.
- S4030 is different from S30 and S40.
- S4040 are sequentially executed.
- the third opening display block 4548 executes the third opening display mode Mo3 in the opening period Po.
- the host vehicle image 56s and a plurality of area images 56a associated therewith are read from the memory 54m by the area display sub-block 4545 and displayed on the MFD 51.
- the area display sub-block 4545 switches the area image 56a to the attention image 56c in the first opening display mode Mo1 and cancels the association between the images 56c and 56s in the display mode Mo1. It is prohibited by.
- the fourth opening display block 4549 executes the fourth opening display mode Mo4 in the opening period Po. Specifically, in the fourth opening display mode Mo4, each caution image 56c whose association with the host vehicle image 56s is released is displayed on the HUD 50. At this time, the display of the notification image 56i is not executed in the MFD 51 of the fourth embodiment.
- S50 and S60 similar to those of the first embodiment are executed both after the sequential execution of S30 and S40 and after the sequential execution of S4030 and S4040. Accordingly, in the vehicle display control flow of the fourth embodiment, S10 and S4010 correspond to “opening detection step”, and S20, S30, S40, S4030, and S4040 correspond to “opening control step”.
- the first opening display mode Mo1 and the second opening display mode Mo2 are sequentially executed during the opening period Po when the opening command O is detected for the first time on the same date. . Therefore, the user can easily grasp the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c in association with the detection area 30a corresponding to each area image 56a before switching.
- the third opening display mode Mo3 and the fourth opening display mode Mo4 are sequentially executed in the opening period Po when the opening command O is detected for the second time or later on the same date.
- the third opening display mode Mo3 in the first opening display mode Mo1, switching from the area image 56a displayed in association with the host vehicle image 56s in the MFD 51 to the attention image 56c is prohibited. Therefore, it is possible to suppress the user from feeling troublesome due to repeated display of the caution image 56c on the same date.
- the fourth opening display mode Mo4 after the third opening display mode Mo3 attention is paid to the HUD 50. An image 56c is displayed. Therefore, the user can easily grasp the driving risk that depends on the obstacle distance corresponding to the attention level L indicated by the attention image 56c in the HUD 50 in association with the detection area 30a corresponding to each area image 56a in the MFD 51. Become.
- the display order of each area image 56a is in an order other than that described in the first and second embodiments, for example, according to the operation of the display setting switch by the user. You may employ
- all area images 56a may be displayed simultaneously.
- sub-blocks 545 and 4545 and S301 and S4301 of Modification 3 for example, only the area image 56a corresponding to the detection area 30a of the external sensor 30 selected according to the operation of the display setting switch by the user may be displayed.
- the sequence display of each area image 56a according to the second embodiment may be adopted in the sub blocks 545 and 4545 and S301 and S4301 of the fourth embodiment.
- the area image 56a corresponding to the detection area 305a of the long-distance millimeter-wave radar 305 having a long maximum detection distance D is displayed, and other area images 56a and The own vehicle image 56s may be reduced.
- the ratio of the separation distances from the own vehicle image 56s to the most distant portion of the outer peripheral contour line of each area image 56a is set to the ratio of the maximum detection distances D of the corresponding detection areas 30a.
- the sub blocks 547 and S303 may not be employed.
- the association between the image 56s and the attention image 56c may be canceled by deleting the host vehicle image 56s in the sub blocks 546 and S302.
- the previous modification 8 may be employed or may not be employed.
- the third opening display mode Mo3 according to the fourth embodiment is executed instead of the first opening display mode Mo1. May be. That is, in the modified example 10, the sub-blocks 546, 547 and S302, S303 may not be adopted in the blocks 543 and S30 of the first embodiment, the second embodiment, or the third embodiment.
- the caution image 56c may be displayed in association with the image 56s by displaying the host vehicle image 56s.
- the sub blocks 546 and S302 or the sub blocks 547 and S303 may be added.
- the blocks 544 and S40 may be adopted instead of the blocks 4549 and S4040.
- the entire display of the area image 56a may be deleted after the entire display of the caution image 56c or simultaneously with the entire display.
- the blocks 544 and S40 may not be employed.
- the blocks 4549 and S4040 may not be used instead of or in addition to the modification 13.
- the notification image 56i may not be displayed in the sub blocks 547 and S303.
- the determination conditions other than the number of detections of the opening command O on the same date may be used.
- the determination conditions of such modification 16 include, for example, the cumulative number of detection times or elapsed time from the first opening command O after shipment from the factory, the time interval of the opening command O between the previous time and the current time, the detection location of the opening command O, and the like. Adopted.
- the display modes Mo1 and Mo2 are executed by blocks 4543 and 544 and S30 and S40, and when the cumulative number of detections is large, display is performed by blocks 4548 and 4549 and S4030 and S4040. Modes Mo3 and Mo4 are executed.
- the display modes Mo1 and Mo2 are executed by the blocks 4543 and 544 and S30 and S40. If the elapsed time is long, the display modes Mo3 and Mo4 are executed by the blocks 4548, 4549 and S4030 and S4040. Execute. Further, when the time interval is long as a determination condition, the display modes Mo1 and Mo2 are executed by the blocks 4543 and 544 and S30 and S40, and when the time interval is short, the display modes Mo3 and Mo4 are executed by the blocks 4548, 4549 and S4030 and S4040. Execute.
- the display modes Mo1 and Mo2 are executed in blocks 4543, 544 and S30, S40, and if the detection location is other than the home, blocks 4548, 4549 and S4030, In S4040, display modes Mo3 and Mo4 are executed.
- At least one of the HUD 50 and the combination meter 52 may be used instead of or in addition to the MFD 51 as a display destination of the images 56s, 56a, and 56c in the blocks 543 and 4543 and S30 and S4030.
- the image 56i is displayed in blocks 544 and S40.
- Such a display destination corresponds to the “first opening display section”.
- FIG. 20 shows a modified example 18 in which both the HUD 50 and the combination meter 52 are adopted as such a movement destination or display destination. Such a movement destination or display destination corresponds to the “second opening display section”.
- the HCU 54 may not be provided.
- one or more of the ECUs 31 and 42 and the display ECU provided for controlling the display elements 50, 51, and 52 may function as a “vehicle display control device”.
- the blocks 541, 542, 543, 544, and 540 may be constructed by a processor of one or more types of ECUs to realize a vehicle display control flow as the “vehicle display control method”.
- FIG. 21 shows a modified example 19 in which the ECU 51e having the processor 54p and the memory 54m in the MFD 51 fulfills the function of “vehicle display control device”.
- Modification 20 external sensors 30 other than the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307, such as a laser radar, may be employed.
- Modification 21 as long as there are a plurality of external sensors 30, at least one of the sonars 301 and 302, the radars 303, 304, and 305 and the cameras 306 and 307 may not be employed.
- the display number of the area image 56a is changed for each vehicle type of the host vehicle 2, so that the user is aware of the excess or deficiency of the safety performance according to the vehicle type and is appropriate. This can lead to driving behavior.
- At least one of the acoustic unit 5s and the vibration unit 5v may be operated simultaneously with the display.
- the display area of the display range 50a on the HUD 50 may be set larger or equal to the display area of the display range 51a on the MFD 51.
- each unit is expressed as S10, for example.
- each part can be divided into a plurality of sub-parts, while the plurality of parts can be combined into one part.
- each part configured in this manner can be referred to as a circuit, a device, a module, and a means.
- Each of the above-mentioned plurality of parts or a combination thereof is not only (i) a software part combined with a hardware unit (for example, a computer), but also (ii) hardware (for example, an integrated circuit, As a part of the (wiring logic circuit), it can be realized with or without including the functions of related devices.
- the hardware unit can be configured inside a microcomputer.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Multimedia (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electromagnetism (AREA)
- Acoustics & Sound (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Traffic Control Systems (AREA)
Abstract
外界の障害物を検知する複数の外界センサ(30)と、情報を表示する表示ユニット(5d)とを搭載した自車両において、各外界センサに関するセンサ情報の表示ユニットでの表示を制御する車両用表示制御装置(54,51e)であって、自車両に対するユーザからのオープニング指令(O)を検知するオープニング検知部(541,4541)と、自車両を示す自車両画像(56s)と、各外界センサ毎に障害物を検知可能な検知エリア(30a)を自車両画像と関連付けて示す複数のエリア画像(56a)とを、記憶する画像記憶部(54m)と、オープニング指令が検知された場合のオープニング期間(Po)において、画像記憶部から自車両画像及び各エリア画像を読出して、それらの画像をセンサ情報として表示ユニットに表示させるオープニング制御部(542,543,544,4543,4548,4549)とを、備える。
Description
本出願は、2015年2月9日に出願された日本特許出願番号2015-023616号に基づくもので、ここにその記載内容を援用する。
本開示は、車両用表示制御装置及び車両用表示制御方法に関する。
従来、自車両に搭載された表示ユニットでの表示を制御する車両用表示制御技術は、広く知られている。
例えば、特許文献1に開示される車両用表示制御技術では、自車両に対するユーザからのオープニング指令を検知することで、当該オープニング指令が検知された場合のオープニング期間に、オープニング画像を表示ユニットに表示させている。ここで、表示ユニットに表示させるオープニング画像は、ユーザを歓迎する演出を行うためのものであり、画像記憶部に予め記憶されることで、オープニング期間に読出されて表示されるようになっている。
また、特許文献2に開示される車両用表示制御技術では、自車両に搭載された複数の外界センサにより外界の障害物を検知して、自車両からの障害物の距離に応じた報知を音の変化により実現している。このような報知によれば、それら外界センサを利用した安全システムの狙う衝突被害の軽減効果又は回避効果を高めて、ユーザの安全と安心とを確保することが可能となる。
特許文献2に開示されるような複数の外界センサに関して、それぞれの機能、性能及び限界を理解した上でユーザが自車両を運転することは、衝突被害の軽減効果又は回避効果をさらに高めていく上で、重要となる。しかし、各外界センサによる障害物の検知機能については、直接的な視認や体感が困難であることから、近年における安全技術の高度化も相俟って、ユーザにとっては直感的に理解し難いものとなってきている。また、各外界センサの性能や限界については、ユーザが自車両の取り扱い説明書等を熟読しなければ正確に把握できず、安全システムの作動する運転シーンが実際に現出するまでは、ユーザには理解され難いというのが実状である。
そこで本発明者は、特許文献1に開示されるようなオープニング期間の表示として、各外界センサに関するセンサ情報の表示を行うことで、それら各外界センサの機能、能力及び限界に対するユーザの理解を支援する技術ついて、鋭意研究を重ねてきた。
本開示は、こうした鋭意研究の結果として創作されたものであり、その目的は、外界センサが複数搭載される自車両において、各外界センサに関するユーザの理解を支援することで、衝突被害の軽減又は回避に貢献する車両用表示制御装置及び車両用表示制御方法を、提供することにある。
本開示の一態様による車両用表示制御装置は、外界の障害物を検知する複数の外界センサと、情報を表示する表示ユニットとを搭載した自車両において、各外界センサに関するセンサ情報の表示ユニットでの表示を制御する表示制御装置であって、自車両に対するユーザからのオープニング指令を検知するオープニング検知部と、自車両を示す自車両画像と、各外界センサ毎に障害物を検知可能な検知エリアを自車両画像と関連付けて示す複数のエリア画像とを、記憶する画像記憶部と、オープニング検知部によりオープニング指令が検知された場合のオープニング期間において、画像記憶部から自車両画像及び各エリア画像を読出して、それらの画像をセンサ情報として表示ユニットに表示させるオープニング制御部とを、備える。
本開示の他の態様による車両用表示制御方法は、外界の障害物を検知する複数の外界センサと、情報を表示する表示ユニットとを搭載した自車両において、各外界センサに関するセンサ情報の表示ユニットでの表示を制御する方法であって、自車両に対するユーザからのオープニング指令を検知し、オープニング指令が検知された場合のオープニング期間において、自車両を示す自車両画像と、各外界センサ毎に障害物を検知可能な検知エリアを自車両画像と関連付けて示す複数のエリア画像との記憶された画像記憶部から、自車両画像及び各エリア画像を読出して、それらの画像をセンサ情報として表示ユニットに表示させることを、含む。
上記車両用表示制御装置及び方法によると、自車両に対するユーザからのオープニング指令が検知された場合のオープニング期間には、画像記憶部から読出される画像がセンサ情報として表示ユニットに表示される。このとき表示される画像は、各外界センサ毎に障害物を検知可能な検知エリアを示すエリア画像を、自車両を示す自車両画像と関連付けたものとなる。故にユーザは、自車両画像と関連付けられた各外界センサ毎のエリア画像の表示から、それら各外界センサの機能、性能及び限界を直感的に把握して理解できる。これによれば、各外界センサに関するユーザの理解を支援し得るので、衝突被害の軽減又は回避に貢献することが可能となる。
本開示についての上記目的およびその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。その図面は、
図1は、本開示の第一実施形態による走行アシストシステムを搭載した自車両の車室内を示す内観図であり、
図2は、第一実施形態による走行アシストシステムを示すブロック図であり、
図3は、図2の複数の外界センサについて説明するための上面模式図であり、
図4は、図1のHUDによる表示状態を示す正面図であり、
図5は、図1のHUDによる表示状態を示す正面図であり、
図6は、図1のMFDによる表示状態を示す正面図であり、
図7Aは、図1のMFDによる表示について説明するための正面模式図であり、
図7Bは、図7Aに続いて、MFDによる表示について説明するための正面模式図であり、
図7Cは、図7Bに続いて、MFDによる表示について説明するための正面模式図であり、
図7Dは、図7Cに続いて、MFDによる表示について説明するための正面模式図であり、
図8は、図1のMFDによる表示状態を示す正面図であり、
図9は、図1のMFDによる表示状態を示す正面図であり、
図10は、図1のMFDによる表示状態を示す正面図であり、
図11は、図2のHCUにより構築される複数のブロックを示すブロック図であり、
図12は、図2のHCUによる車両用表示制御フローを示すフローチャートであり、
図13は、図7Aから図7DのS30による第一オープニング表示モードを示すフローチャートであり、
図14Aは、本開示の第二実施形態のMFDによる表示について説明するための正面模式図であり、
図14Bは、図14Aに続いて、MFDによる表示について説明するための正面模式図であり、
図14Cは、図14Bに続いて、MFDによる表示について説明するための正面模式図であり、
図15Aは、本開示の第三実施形態のMFDによる表示について説明するための正面模式図であり、
図15Bは、図15Aに続いて、MFDによる表示について説明するための正面模式図であり、
図15Cは、図15Bに続いて、MFDによる表示について説明するための正面模式図であり、
図15Dは、図15Cに続いて、MFDによる表示について説明するための正面模式図であり、
図16は、本開示の第四実施形態のHCUにより構築される複数のブロックを示すブロック図であり、
図17は、図16のHCUによる車両用表示制御フローを示すフローチャートであり、
図18は、図17のS4030による第一オープニング表示モードを示すフローチャートであり、
図19は、図6に示す表示状態の変形例を示す正面図であり、
図20は、図1に示す自車両の車室内の変形例を示す内観図であり、
図21は、図2に示す走行アシストシステムの変形例を示すブロック図である。
以下、本開示の複数の実施形態を図面に基づいて説明する。尚、各実施形態において対応する構成要素には同一の符号を付すことにより、重複する説明を省略する場合がある。各実施形態において構成の一部分のみを説明している場合、当該構成の他の部分については、先行して説明した他の実施形態の構成を適用することができる。また、各実施形態の説明において明示している構成の組み合わせばかりではなく、特に組み合わせに支障が生じなければ、明示していなくても複数の実施形態の構成同士を部分的に組み合せることができる。
(第一実施形態)
本開示が適用される第一実施形態の走行アシストシステム(ASSIST)1は、図1,2に示すように、自車両(VH)2に搭載される。尚、以下では、自車両2の走行する速度を車速といい、自車両2の走行する道路を走行路といい、走行路上の自車両2に対して制限される車速を制限速度という。
本開示が適用される第一実施形態の走行アシストシステム(ASSIST)1は、図1,2に示すように、自車両(VH)2に搭載される。尚、以下では、自車両2の走行する速度を車速といい、自車両2の走行する道路を走行路といい、走行路上の自車両2に対して制限される車速を制限速度という。
図2に示すように走行アシストシステム1は、周辺監視系(MONITOR)3、車両制御系(CONTROL)4及び情報提示系(INFO PROVIDE)5から構成されている。これら走行アシストシステム1の各系3,4,5は、例えばLAN(Local Area Network)等の車内ネットワーク6を介して接続されている。
周辺監視系3は、外界センサ30及び周辺監視ECU(Electronic Control Unit)31を備えている。外界センサ30は、自車両2の外界に存在して衝突する可能性のある障害物、例えば他車両、人工構造物、人間及び動物等や、外界に存在する交通表示を検知する。図2,3に示すように外界センサ30としては、ソナー301,302、レーダ303,304,305及びカメラ306,307が、自車両2に搭載されている。
図3に示すように前側方ソナー301は、自車両2のうちフロント部分の左右両側にそれぞれ一つずつ設置された超音波センサである。各前側方ソナー301は、自車両2の外界のうち前側方の検知エリア301aへと送信した超音波の反射波を受信することで、当該エリア301a内の障害物を検知して検知信号を出力する。ここで、各前側方ソナー301により検知可能な検知エリア301aは、自車両2のうち当該ソナー301の設置箇所からの距離として、例えば2m程度の最大検知距離Dsをもって、設定されている。
後側方ソナー302は、自車両2のうちリア部分の左右両側にそれぞれ一つずつ設置された超音波センサである。各後側方ソナー302は、自車両2の外界のうち後側方の検知エリア302aへと送信した超音波の反射波を受信することで、当該エリア302a内の障害物を検知して検知信号を出力する。ここで、各後側方ソナー302により検知可能な検知エリア302aは、自車両2のうち当該ソナー302の設置箇所からの距離として、例えば2m程度の最大検知距離Dsをもって、設定されている。
前方近距離ミリ波レーダ303は、自車両2のうちフロント部分の左右両側にそれぞれ一つずつ設置されたミリ波センサである。各前方近距離ミリ波レーダ303は、自車両2の外界のうち前方の検知エリア303aへと送信したミリ波又は準ミリ波の反射波を受信することで、当該エリア303a内の障害物を検知して検知信号を出力する。ここで、各前方近距離ミリ波レーダ303により検知可能な検知エリア303aは、自車両2のうち当該レーダ303の設置箇所からの距離として、例えば40m程度の最大検知距離Drsをもって、設定されている。
後方近距離ミリ波レーダ304は、自車両2のうちリア部分の左右両側にそれぞれ一つずつ設置されたミリ波センサである。各後方近距離ミリ波レーダ304は、自車両2の外界のうち後方の検知エリア304aへと送信したミリ波又は準ミリ波の反射波を受信することで、当該エリア304a内の障害物を検知して検知信号を出力する。ここで、各後方近距離ミリ波レーダ304により検知可能な検知エリア304aは、自車両2のうち当該レーダ304の設置箇所からの距離として、例えば40m程度の最大検知距離Drsをもって、設定されている。
遠距離ミリ波レーダ305は、自車両2のうちフロント部分の中央に一つ設置されたミリ波センサである。遠距離ミリ波レーダ305は、自車両2の外界のうち前方の検知エリア305aへと送信したミリ波の反射波を受信することで、当該エリア305a内の障害物を検知して検知信号を出力する。ここで、遠距離ミリ波レーダ305により検知可能な検知エリア305aは、自車両2のうち当該レーダ305の設置箇所からの距離として、例えば70~150m程度の最大検知距離Drlをもって、設定されている。
前方カメラ306は、自車両2のうち車室2c内中央のルームミラーに一対設置された単眼式又は複眼式のカメラである。各前方カメラ306は、自車両2の外界のうち前方の検知エリア306aを撮影することで、当該エリア306a内の障害物又は交通表示を検知して画像信号を出力する。ここで、各前方カメラ306により検知可能な検知エリア306aは、自車両2のうち当該カメラ306の設置箇所からの距離として、例えば50~60m程度の最大検知距離Dcをもって、設定されている。
電子ミラーとしても機能する後方カメラ307は、自車両2のうち左右のドアミラー29(図1参照)にそれぞれ一つずつ設けられた単眼式又は複眼式のカメラである。各後方カメラ307は、自車両2の外界のうち後方の検知エリア307aを撮影することで、当該エリア307a内の障害物を検知して画像信号を出力する。ここで、各後方カメラ307により検知可能な検知エリア307aは、自車両2のうち当該カメラ307の設置箇所からの距離として、例えば50~60m程度の最大検知距離Dcをもって、設定されている。
以上より本実施形態では、ソナー301,302、レーダ303,304,305及びカメラ306,307を総称する場合には、「外界センサ30」という。また、ソナー301,302、レーダ303,304,305及びカメラ306,307のそれぞれの検知エリア301a,302a,303a,304a,305a,306a,307aを総称する場合には、「検知エリア30a」という。さらに、ソナー301,302、レーダ303,304,305及びカメラ306,307のそれぞれの最大検知距離Ds,Drs,Drl,Dcを総称する場合には、「最大検知距離D」という。こうした総称下、各外界センサ30毎における検知エリア30aの最大検知距離Dについては、上述したように、短いものから順にDs,Drs,Dc,Drlとなっている。
図2に示す周辺監視ECU31は、プロセッサ及びメモリを有するマイクロコンピュータを主体として構成され、外界センサ30及び車内ネットワーク6に接続されている。周辺監視ECU31は、例えば制限速度標識、止まれ標識、交差点標識、出入口案内標識、トンネル標識及び勾配標識等といった標識情報、並びに白線及び黄線等といった区画線情報を、外界センサ30の出力信号に基づき取得する。それと共に周辺監視ECU31は、例えば障害物の種類、及び自車両2に対する障害物の相対関係等といった障害物情報を、外界センサ30の出力信号に基づき取得する。ここで特に障害物情報としては、例えば前方障害物としての前方車両に対する車間距離、車間時間、相対速度及び衝突予測時間等が周辺監視ECU31により取得される。
車両制御系4は、車両状態センサ40、乗員センサ41及び車両制御ECU42を備えている。車両状態センサ40は、車内ネットワーク6に接続されている。車両状態センサ40は、自車両2の走行状態を検知する。車両状態センサ40は、例えば車速センサ、回転数センサ、燃料センサ、水温センサ、バッテリセンサ及び電波受信機等のうち、一種類又は複数種類である。
具体的に車速センサは、自車両2の車速を検知することで、当該検知に応じた車速信号を出力する。回転数センサは、自車両2におけるエンジン回転数を検知することで、当該検知に応じた回転数信号を出力する。燃料センサは、自車両2の燃料タンクにおける燃料残量を検知することで、当該検知に応じた燃料信号を出力する。水温センサは、自車両2における内燃機関の冷却水温度を検知することで、当該検知に応じた水温信号を出力する。バッテリセンサは、自車両2のバッテリ残量を検知することで、当該検知に応じたバッテリ信号を出力する。電波受信機は、例えば測位衛星、車車間通信用の他車両送信機、及び路車間通信用の路側機等からの出力電波を受信することで、交通信号を出力する。ここで交通信号は、例えば走行位置、走行方向、走行時刻、走行路状態及び制限速度等といった自車両2に関連する交通情報、並びに上記の障害物情報を表わす信号である。
乗員センサ41は、車内ネットワーク6に接続されている。乗員センサ41は、図1に示す自車両2の車室2c内に搭乗したユーザの状態又は操作を検知する。乗員センサ41は、例えばパワースイッチ、ユーザ状態モニタ、着座センサ、ドアセンサ、表示設定スイッチ、ライトスイッチ、ターンスイッチ等のうち、一種類又は複数種類である。
具体的にパワースイッチは、自車両2の内燃機関又は電動モータを始動させるために車室2c内にてユーザによりオン操作されることで、当該操作に応じたパワー信号を出力する。ユーザ状態モニタは、車室2c内にて運転席20上のユーザ状態を画像センサにより撮影することで、当該ユーザ状態を検知して画像信号を出力する。着座センサは、車室2c内にて運転席20へのユーザの着座動作を検知することで、当該検知に応じた着座信号を出力する。ドアセンサは、自車両2のうち運転席20側のドア25にて車室2c外からのユーザによる開放操作を検知することで、当該検知に応じたドア信号を出力する。
表示設定スイッチは、車室2c内にて表示状態を設定するためにユーザにより操作されることで、当該操作に応じた表示設定信号を出力する。ライトスイッチは、自車両2の各種ライトを点灯させるために車室2c内にてユーザによりオン操作されることで、当該操作に応じたライト信号を出力する。ターンスイッチは、自車両2の方向指示器を作動させるために車室2c内にてユーザによりオン操作されることで、当該操作に応じたターン信号を出力する。
図2に示す車両制御ECU42は、プロセッサ及びメモリを有するマイクロコンピュータを主体として構成され、車内ネットワーク6に接続されている。車両制御ECU42は、エンジン制御ECU、モータ制御ECU、ブレーキ制御ECU及び統合制御ECU等のうち、統合制御ECUを少なくとも含む一種類又は複数種類である。
具体的にエンジン制御ECUは、エンジンのスロットルアクチュエータや燃料噴射弁の作動をアクセルペダル26(図1参照)の操作に従って又は自動で制御することで、自車両2の車速を加減速する。モータ制御ECUは、モータジェネレータの作動をアクセルペダル26の操作に従って又は自動で制御することで、自車両2の車速を加減速する。ブレーキ制御ECUは、ブレーキアクチュエータの作動をブレーキペダル27(図1参照)の操作に従って又は自動で制御することで、自車両2の車速を加減速する。
統合制御ECUは、例えばセンサ40,41の出力信号、周辺監視ECU31での取得情報、及び車両制御ECU42としての他制御ECUでの制御情報等に基づき、当該他制御ECUの作動を同期制御する。特に本実施形態の統合制御ECUは、車両制御ECU42としての他制御ECUに制御指令を与えることで、同一方向へ走行する前方車両等の前方障害物に対する自車両2の衝突被害を自動で軽減又は回避するように、作動する。このとき統合制御ECUは、緊急制御条件が成立した場合に、自車両2の車速を強制的に自動減速して衝突被害軽減制動(AEB:Autonomous Emergency Braking)を実現する。ここで、AEBの緊急制御条件としては、前方車両に対する自車両2の衝突予測時間が、例えば5秒以下にまで迫ること等である。
情報提示系5は、音響ユニット5s、振動ユニット5v及び表示ユニット5dを組み合わせてなる。
音響ユニット5sは、情報を聴覚提示するために自車両2に搭載されている。音響ユニット5sは、スピーカ及び音源回路を主体として構成され、車内ネットワーク6に接続されている。音響ユニット5sは、図1に示す自車両2の車室2c内にて例えば運転席20、インストルメントパネル22及びドア25のうち一箇所又は複数箇所に設置されて、運転席20上のユーザにより知覚可能な報知音波又は報知音声を発する。
図2に示す振動ユニット5vは、情報を触覚提示するために自車両2に搭載されている。振動ユニット5vは、振動アクチュエータを主体として構成され、車内ネットワーク6に接続されている。振動ユニット5vは、図1に示す車室2c内にて例えば運転席20、ステアリングハンドル24、アクセルペダル26、ブレーキペダル27及びフットレスト28のうち一箇所又は複数箇所に設置されて、運転席20上のユーザにより知覚可能な報知振動を発する。
図2に示す表示ユニット5dは、情報を視覚提示するために自車両2に搭載されている。表示ユニット5dは、HUD(Head-up Display)50、MFD(Multi Function Display)51、コンビネーションメータ52及びHCU(HMI(Human Machine Interface) Control Unit)54を備えている。
HUD50は、図1に示す車室2c内にてインストルメントパネル22に設置されている。HUD50は、液晶パネル又は投射スクリーンにて所定情報を示すように形成した画像56を自車両2のウインドシールド21に投影することで、当該画像56の虚像を運転席20上のユーザにより視認可能に表示する。このとき、HUD50による虚像表示は、ウインドシールド21への画像56の投影範囲となる所定面積の表示範囲50aにて、自車両2の前方の外界風景と重なってユーザに視認される。こうしたHUD50による虚像表示としては、図2,4,5に示すような注意画像56c及び報知画像56iの表示が採用される。また、HUD50による虚像表示としては、画像56c,56iに追加して、例えばナビゲーション情報、標識情報及び障害物情報等のうち、一種類又は複数種類の情報を示す画像表示を採用してもよい。尚、インストルメントパネル22に配置されてウインドシールド21と共同して外界風景を透過させるコンバイナを用いることで、当該コンバイナに画像56を投影することによっても、虚像表示の実現が可能である。また、上記のナビゲーション情報は、例えば後に詳述するHCU54において、メモリ54mに記憶の地図情報と、センサ40の出力信号とに基づき取得可能である。
MFD51は、図1に示す車室2c内にてセンターコンソール23に設置される。MFD51は、一つ又は複数の液晶パネルにて所定情報を示すように形成した画像56の実像を、運転席20上のユーザにより視認可能に表示する。このとき、MFD51による実像表示は、HUD50の表示範囲50aよりも大きな面積の表示範囲51aにて、ユーザに視認される。こうしたMFD51による実像表示としては、図4~10に示すような自車両画像56s、エリア画像56a、注意画像56c及び報知画像56iの表示が採用される。また、MFD51による実像表示としては、画像56s,56a,56c,56iに追加して、ナビゲーション情報、オーディオ情報、映像情報及び通信情報等のうち、一種類又は複数種類の情報を示す画像表示を採用してもよい。
コンビネーションメータ52は、図1に示す車室2c内にてインストルメントパネル22に設置される。コンビネーションメータ52は、自車両2に関する車両情報を、運転席20上のユーザにより視認可能に表示する。コンビネーションメータ52は、液晶パネルに形成した画像により車両情報を表示するデジタルメータ、又は指針により目盛を指示して車両情報を表示するアナログメータである。こうしたコンビネーションメータ52による表示としては、例えば車速、エンジン回転数、燃料残量、冷却水温度、バッテリ残量、並びにライトスイッチ、ターンスイッチ及びドア25の操作状態等のうち、一種類又は複数種類の情報を示す表示が採用される。
HCU54は、プロセッサ54p及びメモリ54mを有するマイクロコンピュータを主体として構成され、表示ユニット5dの表示要素50,51,52及び車内ネットワーク6に接続されている。HCU54は、音響ユニット5s及び振動ユニット5vの作動、並びに表示ユニット5dの表示要素50,51,52の作動とを同期制御する。このときHCU54は、例えばセンサ40,41の出力信号、ECU31での取得情報、ECU42での制御情報、メモリ54mの記憶情報、並びにHCU54自身の計時情報を含む取得情報等に基づき、それらの作動制御を実行する。尚、HCU54のメモリ54m及び他の各種ECUのメモリは、例えば半導体メモリ、磁気媒体若しくは光学媒体等といった記憶媒体を、一つ又は複数使用してそれぞれ構成される。
ここで特に本実施形態では、「画像記憶部」としてのメモリ54mに画像56s,56a,56c,56iがデータとして記憶されることで、HCU54が「車両用表示制御装置」として機能する。かかる機能によりHCU54は、HUD50での画像56c,56iの虚像表示且つMFD51での画像56s,56a,56c,56iの実像表示を、各外界センサ30に関するセンサ情報表示として制御することから、その詳細を以下に説明する。尚、画像56s,56a,56c,56iを記憶させる「画像記憶部」を、表示要素50,51,52の内蔵ECUの各メモリのうちいずれかにより、又はそれら各メモリ及びHCU54のメモリ54mのうち複数メモリの共同により、実現しても勿論よい。
HCU54は、メモリ54mに記憶の車両用表示制御プログラムをプロセッサ54pにより実行することで、図11に示すように複数のブロック541,542,543,544,540を機能的に構築する。尚、これらブロック541,542,543,544,540のうち少なくとも一部を、一つ又は複数のIC等によりハードウェア的に構築しても勿論よい。
「オープニング検知部」としてのオープニング検知ブロック541は、自車両2に対するユーザからのオープニング指令Oを検知する。ここでオープニング指令Oとは、自車両2の運転を開始するユーザの意思を表すものをいい、乗員センサ41の出力信号に基づき検知される。こうしたオープニング指令Oには、例えばパワースイッチのパワー信号に基づき検知されるオン操作、ドアセンサのドア信号に基づき検知される開放操作、及び着座センサの着座信号又はユーザ状態モニタの画像信号に基づき検知される着座動作等が採用される。
「オープニング制御部」としての期間設定ブロック542は、オープニング検知ブロック541によるオープニング指令Oの検知後に、オープニング期間Po(図12参照)を設定する。ここでオープニング期間Poは、オープニング指令Oの検知直後、又はオープニング指令Oの検知から設定時間後に、開始される。また、オープニング期間Poの開始後における時間長さは、運転席20上のユーザによる画像56s,56a,56c,56iの視認が可能となるように、後に詳述する表示ブロック543,544での表示制御内容に応じて、例えば5~10秒程度に設定される。
このような期間設定ブロック542により設定されたオープニング期間Poにおいて、「オープニング制御部」としての表示ブロック543,544は、それぞれ個別のオープニング表示モードMo1,Mo2(図12参照)を順次実行する。まず、第一オープニング表示ブロック543は、複数のサブブロック545,546,547から構成されている。
エリア表示サブブロック545は、自車両画像56s及び複数のエリア画像56aを、メモリ54mから読出してMFD51に図6の如く表示させる。このときの自車両画像56sは、自車両2の上面視形状を、模式的に示した図形画像となる。また、このときの各エリア画像56aは、各外界センサ30毎の検知エリア30a(図3参照)のうちそれぞれ対応するエリアを、模式的に示した図形画像となる。こうした各エリア画像56aの表示色は、互いに同じであってもよいし、互いに異なっていてもよい。また、各エリア画像56aの外周輪郭線のうち、自車両画像56sから最も離間した部分までの離間距離は、それぞれ対応する検知エリア30aの最大検知距離D(図3参照)をイメージ的に表す指標となる。但し、図3,6に示すように、各エリア画像56aの外周輪郭線のうち自車両画像56sから最も離間した部分までの離間距離同士の比は、それぞれ対応する検知エリア30aの最大検知距離D同士の比とは、表示サイズの都合上から相異なっている。
以上によりエリア表示サブブロック545は、図7Aから図7Dの如くエリア画像56aに対応する最大検知距離Dの短い外界センサ30側から順に、各エリア画像56aをMFD51の表示範囲51aにシーケンス表示させる。このとき特に本実施形態では、図7Aに示すDsのソナー301,302、図7Bに示すDrsの近距離ミリ波レーダ303,304、図7Cに示すDcのカメラ306,307、及び図7Dに示すDrlの遠距離ミリ波レーダ305という順に従って、対応するエリア画像56aを自車両画像56sに重畳表示させる。以上の結果、オープニング期間Poのうちエリア表示サブブロック545による表示制御期間のMFD51においては、図6の如く全エリア画像56aのそれぞれが自車両画像56sに関連付けて表示される。
図11に示す注意表示サブブロック546は、オープニング期間Poのうちエリア表示サブブロック545による表示制御期間後に、MFD51での全エリア画像56aの表示を、メモリ54mから読出した注意画像56cの複数表示へと図8の如く切替える。このときの各注意画像56cは、ユーザによる自車両2の運転リスクとして、自車両2からの障害物の距離(以下、単に「障害物距離」という)に依拠するリスクに対応させた複数の注意レベルLl,Lh,Lmを、それぞれ模式的に示した図形画像となる。
具体的に、運転リスクが低い場合に注意レベルLlを示す注意画像56cは、自車両画像56sを中心とする外周輪郭線の半径が最大径の円形画像である。運転リスクが高い場合に注意レベルLhを示す注意画像56cは、自車両画像56sを中心とする外周輪郭線の半径が最小径の円形画像である。運転リスクが中程度である場合に注意レベルLmを示す注意画像56cは、自車両画像56sを中心とする外周輪郭線の半径が最小径及び最大径の間の円形画像である。こうした各注意画像56cの外周輪郭線の半径は、切替え前の各エリア画像56aにより図6の如く示される検知エリア30aに対して、自車両2からの障害物距離をイメージ的に関連付ける指標となる。尚、以下の説明において注意レベルLl,Lh,Lmを総称する場合には、「注意レベルL」という。
以上により注意表示サブブロック546は、エリア画像56aから切替えられる全注意画像56cのそれぞれを、図8の如く自車両画像56sと関連付けてMFD51の表示範囲51aに表示させる。このとき特に本実施形態では、各エリア画像56aをそれぞれの表示箇所にてフェードアウトさせつつ、各注意画像56cをそれぞれの表示箇所にてフェードインさせる動画状に、それらの画像56a,56cをアニメーション表示させる。以上の結果、オープニング期間Poのうち注意表示サブブロック546による表示制御期間のMFD51においては、自車両画像56sが表示箇所に残像しつつ、当該画像56sとの関連付け対象がエリア画像56aから注意画像56cへと切替えられる。
図11に示す解除表示サブブロック547は、オープニング期間Poのうち注意表示サブブロック546による表示制御期間後に、各注意画像56cの関連付けられた自車両画像56sをMFD51にて図9の如く消去させることで、当該関連付けを解除する。このとき特に本実施形態では、自車両画像56sとの関連付けを解除された各注意画像56cの表示を、MFD51の表示範囲51aにて同心上に縮小させる。以上の結果、オープニング期間Poのうち解除表示サブブロック547による表示制御期間のMFD51においては、各注意画像56cのみが縮小状態にて表示される。
このようにして各サブブロック545,546,547による一連の表示制御期間には、第一オープニング表示モードMo1が実現されることになる。故に本実施形態では、かかる第一オープニング表示モードMo1にて利用されるMFD51が「第一オープニング表示部」に相当する。
これに対して、図11に示す第二オープニング表示ブロック544は、オープニング期間Poのうち解除表示サブブロック547による表示制御期間後において、MFD51での各注意画像56cの表示をHUD50へと図4の如く移動させる。このとき特に本実施形態では、自車両画像56sとの関連付けを解除された縮小状態の各注意画像56cを、MFD51での表示サイズと実質同一サイズにてHUD50の表示範囲50aに表示させる。それと共に、図10の如く本実施形態では、移動対象の各注意画像56cをMFD51の表示範囲51aにて消去すると共に、複数の報知画像56iをメモリ54mから読出して当該範囲51aに表示させる。このとき、各注意画像56cをそれぞれの表示箇所にてフェードアウトさせつつ、各報知画像56iをそれぞれの表示箇所にてフェードインさせる動画状に、それらの画像56c,56iをアニメーション表示させてもよい。あるいは、注意画像56cの全消去よりも後、又は当該全消去と同時に、報知画像56iを全表示させてもよい。また、このときの各報知画像56iは、後に詳述するオープニング期間Po後のHUD50により各注意画像56cの注意レベルと関連付けて報知される報知内容(図5参照)の区別を、文字表記により示した文字画像となる。
具体的に報知画像56iの一つは、MUD51の表示範囲51aのうち要因表示エリアにて注意レベルLに対応した運転リスクの発生要因が報知されることを、当該表示エリア名の文字表記により示す文字画像である。報知画像56iの別の一つは、表示範囲51aのうち行動表示エリアにて注意レベルLに応じた運転行動が報知されることを、当該表示エリア名の文字表記により示す文字画像である。報知画像56iのまた別の一つは、表示範囲51aのうち前方表示エリアにて前方障害物への注意レベルLが報知されることを、当該表示エリア名の文字表記により示す文字画像である。報知画像56iのさらに別の一つは、表示範囲51aのうち後方表示エリアにて後方障害物への注意レベルLが報知されることを、当該表示エリア名の文字表記により示す文字画像である。報知画像56iのまたさらに別の一つは、表示範囲51aのうち注意レベル表示エリアにて注意レベルLが報知されることを、当該表示エリア名の文字表記により示す文字画像である。尚、図10では、各報知画像56iにそれぞれ対応する表示エリア同士の境界を、二点鎖線により仮想的に示している。
以上の結果、オープニング期間Poのうち第二オープニング表示ブロック544による表示制御期間にて、第二オープニング表示モードMo2が実現されることになる。故に本実施形態では、かかる第二オープニング表示モードMo2にて利用されるHUD50が「第二オープニング表示部」に相当する。尚、第二オープニング表示モードMo2の実行によるHUD50での注意画像56cの表示は、オープニング期間Poの終了後も継続されるが、当該実行によるMFD51での報知画像56iの表示は、オープニング期間Poの終了に伴って消去される。
図11に示す通常表示ブロック540は、オープニング期間Po後に通常表示モードMn(図12参照)を実行する。かかる通常表示モードMnの実行により通常表示ブロック540は、HUD50の表示範囲50aにて図5の如く、注意レベル表示エリアでの各注意画像56cの表示を継続させると共に、必要に応じて選択される報知画像56iも所定エリアにて表示させる。ここで、このときの報知画像56iは、各注意画像56cの注意レベルと関連付けて報知される報知内容自体を、文字表記により又は模式的に示した文字画像又は図形画像となる。
具体的に報知画像56iの一つは、MUD51の表示範囲51aよりも小さな表示面積となるHUD50の表示範囲50aのうち要因表示エリアにて、注意レベルLに対応した運転リスクの発生要因を文字表記により示す文字画像である。報知画像56iの別の一つは、表示範囲50aのうち行動表示エリアにて、注意レベルLに応じた運転行動を文字表記により示す文字画像である。報知画像56iのまた別の一つは、表示範囲50aのうち前方表示エリアにて、前方障害物への注意レベルLを模式的に示す楕円形画像である。報知画像56iのさらに別の一つは、表示範囲50aのうち後方表示エリアにて、後方障害物への注意レベルLを模式的に示す楕円形画像(図示なし)である。ここで、報知画像56iとして楕円形画像を前方表示エリア又は後方表示エリアに表示する際の通常表示ブロック540は、注意レベル表示エリアに表示される各注意画像56cのうち注意レベルLに応じた画像を、例えば図5の如く変形させる。以上の結果、AEBの作動前段階から、運転リスクに対する注意喚起をユーザに対して与えることが可能となる。
以上説明したブロック541,542,543,544,540を構築するHCU54によると、図12,13に示すように、「車両用表示制御方法」としての車両用表示制御フローが実現されることから、その詳細を以下に説明する。尚、車両用表示制御フロー中の「S」とは、各ステップを意味する。
図12に示す車両用表示制御フローのS10では、自車両2に対するユーザからのオープニング指令Oを検知したか否かにつき、オープニング検知ブロック541により判定する。このときのオープニング指令Oは、ここではパワースイッチのオン操作であるとする。こうしたS10の判定の結果、オープニング指令Oを検知するまではS10を繰返す一方、同指令Oを検知すると、S20へ移行する。
S20では、オープニング期間Poを期間設定ブロック542により設定する。続くS30では、オープニング期間Poにおける第一オープニング表示モードMo1を第一オープニング表示ブロック543により実行する。
具体的に、図13に示す第一オープニング表示モードMo1のS301では、自車両画像56s及びそれに関連付けられる複数のエリア画像56aを、エリア表示サブブロック545によりメモリ54mから読出してMFD51に表示させる。このとき、本実施形態のMFD51においては、最大検知距離Dが短い外界センサ30側から順に、各エリア画像56aをシーケンス表示させることになる。
次に、第一オープニング表示モードMo1のS302では、注意表示サブブロック546により、メモリ54mから読出した各注意画像56cのMFD51での表示を、全エリア画像56aからの切替えにより実行する。このとき、本実施形態のMFD51においては、自車両画像56sと関連付けられた全エリア画像56aをフェードアウトさせつつ、全注意画像56cを自車両画像56sと関連付けつつフェードインさせる動画状に、アニメーション表示させることになる。
続いて、第一オープニング表示モードMo1のS303では、MFD51にて各注意画像56cの関連付けられた自車両画像56sを、解除表示サブブロック547により消去することで、当該関連付けを解除する。
こうして第一オープニング表示モードMo1が完了すると、図12に示す車両用表示制御フローのS40では、オープニング期間Poにおける第二オープニング表示モードMo2を第二オープニング表示ブロック544により実行する。具体的に第二オープニング表示モードMo2においては、MFD51にて自車両画像56sとの関連付けを解除された各注意画像56cの表示を、第二オープニング表示ブロック544によりHUD50へと移動させる。このとき、本実施形態のMFD51においては、移動対象の各注意画像56cを消去すると共に、メモリ54mから読出した各報知画像56iを表示させることになる。
以上によりオープニング期間Poが経過すると、S50では、パワースイッチがオフ操作されたか否かにつき、通常表示ブロック540により判定する。その結果、パワースイッチがオフ操作されている場合には車両用表示制御フローを終了する一方、同スイッチがオン操作されている場合にはS60へ移行する。
S60では、通常表示ブロック540により通常表示モードMnを実行する。具体的に通常表示モードMnにおいては、HUD50での各注意画像56cの表示を継続させると共に、必要に応じて選択される報知画像56iを同HUD50にて表示させる。尚、この後にはS50へと戻ることで、パワースイッチがオフ操作されるまでは、各注意画像56cの表示且つ必要に応じた報知画像56iの表示が実行されることになる。
尚、以上の車両用表示制御フローにおいては、S10が「オープニング検知ステップ」に相当し、S20,S30,S40が「オープニング制御ステップ」に相当する。
(作用効果)
以上説明した第一実施形態の作用効果を、以下に説明する。
以上説明した第一実施形態の作用効果を、以下に説明する。
第一実施形態によると、自車両2に対するユーザからのオープニング指令Oが検知された場合のオープニング期間Poには、メモリ54mから読出される画像がセンサ情報としてMFD51に表示される。このとき表示される画像は、各外界センサ30毎に障害物を検知可能な検知エリア30aを示すエリア画像56aを、自車両2を示す自車両画像56sと関連付けたものとなる。故にユーザは、自車両画像56sと関連付けられた各外界センサ30毎のエリア画像56aの表示から、それら各外界センサ30の機能、性能及び限界を直感的に把握して理解できる。これによれば、各外界センサ30に関するユーザの理解を支援し得るので、衝突被害の軽減又は回避に貢献することが可能となる。
また、第一実施形態によると、各エリア画像56aは、自車両2からの距離として検知エリア30aの最大検知距離Dが短い外界センサ30側から順に、シーケンス表示される。これによりユーザは、各外界センサ30毎の検知エリア30aについて検知限界を表す最大検知距離Dを、短いものから順に直感的に且つ正確に把握できるので、当該検知限界に対するユーザの理解度を高め得る。したがって、衝突被害の軽減又は回避に貢献する上において、有効となる。
さらに、第一実施形態によると、オープニング期間Poにおいて自車両画像56sと関連付けて表示されるエリア画像56aは、当該関連付け表示の後に、メモリ54mから読出された注意画像56cへと切替えられる。これによりユーザは、切替え後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した各外界センサ30毎の検知エリア30aと関連付けて、意識し易くなる。故に、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることを、ユーザは直感的に理解し得る。したがって、衝突被害の軽減又は回避に貢献する上において、有効となる。
またさらに、第一実施形態によると、オープニング期間Poにおいてエリア画像56aから切替えられる注意画像56cは、自車両画像56sと関連付けて表示される。その結果、切替え前のエリア画像56aについても、切替え後の注意画像56cについても、共通の自車両画像56sとの関連付けにより自車両2からの距離との関係が明確となる。これによりユーザは、切替え後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易くなる。故に、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることの直感的な理解度を、ユーザに高めさせ得る。したがって、衝突被害の軽減又は回避に貢献する上において、特に有効となる。
加えて、第一実施形態のオープニング期間Poにおいては、エリア画像56aが表示箇所にてフェードアウトしつつ、注意画像56cが同箇所にてフェードインする動画状に、アニメーション表示される。その結果、切替え前のエリア画像56aと切替え後の注意画像56cとは、一時的に重畳して表示されることになる。これによりユーザは、切替え後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易くなる。故に、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることの直感的な理解度を、ユーザに高めさせ得る。したがって、衝突被害の軽減又は回避に貢献する上において、特に有効となる。
また加えて、第一実施形態のオープニング期間Poには、まず第一オープニング表示モードMo1の実行により、表示ユニット5dのうちMFD51にてエリア画像56aは、自車両画像56sとの関連付け表示後に注意画像56cへと切替えられる。故にユーザは、切替え後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易い。また、さらにオープニング期間Poには、第二オープニング表示モードMo2の実行により、表示ユニット5dのうち同期間Po後に注意画像56cを表示させるHUD50へと、MFD51での注意画像56cの表示が移動させられる。これによりユーザは、オープニング期間Po後のHUD50にて注意画像56cにより示される注意レベルLを、同期間Po中のHUD50にて注意画像56cにより示される注意レベルLと対応付けできる。故にユーザは、オープニング期間Po後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクも、切替え前の各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易くなる。以上によれば、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることの直感的な理解度を、ユーザに高めさせ得る。したがって、衝突被害の軽減又は回避に貢献する上において、特に有効となる。
さらに加えて、第一実施形態のMFD51においては、オープニング期間Poでの第一オープニング表示モードMo1の実行により、注意画像56cがエリア画像56aから切替えられて自車両画像56sと関連付け表示される。故にユーザは、切替え後の注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易い。しかもオープニング期間Poには、第一オープニング表示モードMo1の実行により、MFD51にて自車両画像56sが消去されて注意画像56cとの関連付けが解除された後、第二オープニング表示モードMo2の実行により、当該関連付けの解除された注意画像56cがHUD50に表示される。これによれば、MFD51よりも小さな表示面積となるHUD50の表示範囲50aでは、障害物距離に依拠する運転リスクを検知エリア30aに関連付けて注意レベルLと対応させるために、注意画像56cを適正サイズで表示できる。故に、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることを、運転視界を妨げ難い小面積のHUD50を利用して、オープニング期間Po後まで継続的に意識させ得る。したがって、衝突被害の軽減又は回避に大きく貢献することが可能となる。
またさらに加えて、第一実施形態のオープニング期間Poのうち、注意画像56cの表示がMFD51からHUD50へ移動する第二オープニング表示モードMo2においては、報知画像56iが当該MFD51に表示される。ここで報知画像56iは、オープニング期間Po後に注意画像56cに関連付けて報知される報知内容の区別を示すために、メモリ54mから読出されて表示されることになる。故に、各外界センサ30の機能により検知エリア30a内にて検知される障害物に対しては、自車両2からの距離に応じたレベルの注意が必要であることの理解度を、ユーザに確実に高めさせ得る。したがって、衝突被害の軽減又は回避に大きく貢献することが可能となる。
(第二実施形態)
本開示の第二実施形態は、第一実施形態の変形例である。
本開示の第二実施形態は、第一実施形態の変形例である。
第二実施形態においてエリア表示サブブロック545は、図14Aから図14C示すように、オープニング指令Oに応答して起動するのに要する起動時間Tが短い外界センサ30側から順に、各エリア画像56aをMFD51にシーケンス表示させる。また故に、第二実施形態の車両用表示制御フローのうちS301では、起動時間Tが短い外界センサ30側から順に、各エリア画像56aをシーケンス表示させる。
ここで、図14Aに示すソナー301,302の起動時間Tsは例えば1秒程度、図14Bに示すレーダ303,304,305の起動時間Trは例えば3秒程度、図14Cに示すカメラ306,307の起動時間Tcは例えば5秒程度である。そこで、ソナー301,302、レーダ303,304,305及びカメラ306,307の起動時間Ts,Tr,Tcを、上述の「起動時間T」として総称すると、当該起動時間Tについては、短いものから順にTs,Tr,Tcとなっている。故に、以上の如き第二実施形態においては、図14Aに示すTsのソナー301,302、図14Bに示すTrのレーダ303,304,305、及び図14Cに示すTcのカメラ306,307という順に従って、対応するエリア画像56aを自車両画像56sに重畳表示させることになる。
このように第二実施形態によると、各エリア画像56aは、オープニング指令Oに応答した起動時間Tが短い外界センサ30側から順に、シーケンス表示される。これによりユーザは、各外界センサ30の性能としての起動時間Tを、短いものから順に直感的に且つ正確に把握できるので、当該性能に対するユーザの理解度を高め得る。したがって、衝突被害の軽減又は回避に貢献する上において、有効となる。
(第三実施形態)
本開示の第三実施形態は、第一実施形態の変形例である。
本開示の第三実施形態は、第一実施形態の変形例である。
第三実施形態においてエリア表示サブブロック545は、図15Aから図15Dに示すようにMFD51にて各エリア画像56aを、自車両画像56sとは離間する側へ次第に広がる動画状に、アニメーション表示させる。また故に、第三実施形態の車両用表示制御フローのうちS301では、自車両画像56sとは離間する側へ次第に広がる動画状に、各エリア画像56aをアニメーション表示させる。
尚、図15Aから図15Dは、外界センサ30のうちカメラ306,307に対応した検知エリア306a,307aを示すエリア画像56aにつき、次第に広がる表示状態を時間順で段階的に示しているが、実際には、当該広がりは滑らかに連続することになる。また、外界センサ30のうちカメラ306,307以外に対応した検知エリア301a,302a,303a,304a,305aを示すエリア画像56aについても、図15Aから図15Dに示すように同様に次第に広がる表示状態となることは、いうまでもない。
このように第三実施形態によると、各エリア画像56aは、自車両画像56sとは離間する側へ次第に広がる動画状に、アニメーション表示される。これによりユーザは、各外界センサ30の性能として自車両2とは離間する側へと広がっている検知エリア30aの範囲を、例えば検知用照射波としての超音波等が出射されるイメージをもって直感的に把握できるので、当該性能に対するユーザの理解度を高め得る。したがって、衝突被害の軽減又は回避に貢献する上において、有効となる。
(第四実施形態)
本開示の第四実施形態は、第一実施形態の変形例である。
本開示の第四実施形態は、第一実施形態の変形例である。
図16に示すように、第四実施形態のHCU4054は、「オープニング検知部」としてのオープニング検知ブロック4541を構築する。オープニング検知ブロック4541は、第一実施形態と同様にオープニング指令Oの検知を実行するのに加え、同一日付における当該検知の回数を判定する。ここでオープニング検知ブロック4541は、例えば乗員センサ41としての電波受信機の出力信号及びHCU54の計時情報のうち一種類又は複数種類に基づき、オープニング指令Oの検知実行時における日付を判断する。また、オープニング検知ブロック4541は、同一日付においてオープニング指令Oの検知回数をメモリ54mにて記憶又は更新し、日付の変更に伴って当該検知回数をリセットする。
HCU4054は、「オープニング検知部」としての第一オープニング表示ブロック4543を構築する。第一オープニング表示ブロック4543は、オープニング検知ブロック4541によりオープニング指令Oの検知が同一日付での一回目と判定された場合には、オープニング期間Poに第一オープニング表示モードMo1を実行する。尚、第一オープニング表示モードMo1の表示制御内容は、第一実施形態と同様である。
HCU4054は、「オープニング制御部」としての第三オープニング表示ブロック4548を追加構築する。第三オープニング表示ブロック4548は、オープニング検知ブロック4541によりオープニング指令Oの検知が同一日付での2回目以降と判定された場合には、オープニング期間Poに第三オープニング表示モードMo3(図17参照)を実行する。具体的に第三オープニング表示ブロック4548は、エリア表示サブブロック4545のみから構成されている。ここでエリア表示サブブロック4545は、第一実施形態で説明したエリア表示サブブロック545と同様に、自車両画像56s及び複数のエリア画像56aを、メモリ54mから読出してMFD51の表示範囲51aに表示させる。故に、このような第三オープニング表示ブロック4548では、第一オープニング表示モードMo1の場合におけるエリア画像56aから注意画像56cへの切替えと、同表示モードMo1の場合における画像56c,56sの関連付け解除とが禁止される。
HCU4054は、「オープニング制御部」としての第四オープニング表示ブロック4549を追加構築する。第四オープニング表示ブロック4549は、オープニング期間Poのうちエリア表示サブブロック4545による表示制御期間後において、第四オープニング表示モードMo4(図17参照)を実行する。具体的に第四オープニング表示ブロック4549は、HUD50の表示範囲50aのうち注意レベル表示エリアに各注意画像56cを表示させる。このとき特に第四実施形態では、第二オープニング表示モードMo2の場合と同様に、自車両画像56sとの関連付けを解除された縮小状態の各注意画像56cを、同表示モードMo2での表示サイズと実質同一サイズにてHUD50の表示範囲50aに表示させる。また、このときのMFD51においては、報知画像56iの表示は実行されないことから、HUD50による注意画像56cの全表示よりも前若しくは後、又は当該全表示と同時に画像56s,56aの表示を全消去してもよい。
尚、HCU4054が構築する期間設定ブロック542、第二オープニング表示ブロック544及び通常表示ブロック540については、第一実施形態と同様である。
以上説明したブロック4541,542,4543,544,4548,4549,540を構築するHCU4054によると、車両用表示制御フローが図17,18に示すように実現されることから、第一実施形態とは異なる部分を中心にその詳細を説明する。
図17に示す車両用表示制御フローでは、第一実施形態と同様なS10,S20の実行後に、S4010へと移行する。S4010では、同一日付におけるオープニング指令Oの検知回数を、第一オープニング表示ブロック4543により判定する。その結果、検知回数が一回である場合には、第一実施形態と同様なS30,S40を順次実行する一方、検知回数が二回以上である場合には、当該S30,S40とは異なるS4030,S4040を順次実行する。
具体的にS4030では、オープニング期間Poにおける第三オープニング表示モードMo3を第三オープニング表示ブロック4548により実行する。具体的に、図18に示す第三オープニング表示モードMo3のS4301では、自車両画像56s及びそれに関連付けられる複数のエリア画像56aを、エリア表示サブブロック4545によりメモリ54mから読出してMFD51に表示させる。また、続いてS4302では、第一オープニング表示モードMo1の場合におけるエリア画像56aから注意画像56cへの切替えと、同表示モードMo1の場合における画像56c,56sの関連付け解除とを、エリア表示サブブロック4545により禁止する。
図17に示すように、こうしたS4030に続くS4040では、オープニング期間Poにおける第四オープニング表示モードMo4を第四オープニング表示ブロック4549により実行する。具体的に第四オープニング表示モードMo4では、自車両画像56sとの関連付けが解除された各注意画像56cを、HUD50に表示させる。このとき、第四実施形態のMFD51においては、報知画像56iの表示を実行しない。
以上、S30,S40の順次実行後にも、S4030,S4040の順次実行後にも、第一実施形態と同様なS50,S60を実行する。したがって、第四実施形態の車両用表示制御フローにおいては、S10,S4010が「オープニング検知ステップ」に相当し、S20,S30,S40,S4030,S4040が「オープニング制御ステップ」に相当する。
このように第四実施形態によると、オープニング指令Oの検知が同一日付において一回目となる場合のオープニング期間Poには、第一オープニング表示モードMo1と第二オープニング表示モードMo2とが順次実行される。故にユーザは、注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、切替え前の各エリア画像56aに対応した検知エリア30aに関連付けて、把握し易い。
また一方、第四実施形態によると、オープニング指令Oの検知が同一日付において二回目以降となる場合のオープニング期間Poには、第三オープニング表示モードMo3と第四オープニング表示モードMo4とが順次実行される。ここで第三オープニング表示モードMo3では、第一オープニング表示モードMo1のうち、MFD51にて自車両画像56sと関連付けて表示されたエリア画像56aから注意画像56cへの切替えが禁止される。故に、同一日付における注意画像56cの繰返し表示に起因して、ユーザが煩わしさを感じることを抑制できるまた、そうした第三オープニング表示モードMo3後となる第四オープニング表示モードMo4では、HUD50にて注意画像56cが表示される。故にユーザは、HUD50にて注意画像56cにより示される注意レベルLと対応して障害物距離に依拠する運転リスクを、MFD51にて各エリア画像56aに対応した検知エリア30aと関連付けて、把握し易くなる。
以上によれば、オープニング指令Oの検知回数に起因した煩わしさを抑制しつつ、障害物に対しては同検知回数に拘らず、自車両2からの距離に応じたレベルの注意が必要であることの直感的な理解度を高め得る。したがって、ユーザの運転フィーリングを妨げることなく、衝突被害の軽減又は回避に貢献することが可能となる。
(他の実施形態)
以上、本開示の複数の実施形態について説明したが、本開示は、それらの実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
以上、本開示の複数の実施形態について説明したが、本開示は、それらの実施形態に限定して解釈されるものではなく、本開示の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
変形例1のサブブロック545,4545及びS301,S4301では、各エリア画像56aの表示順として、第一実施形態及び第二実施形態にて説明した以外の順、例えばユーザによる表示設定スイッチの操作に従って設定される順等を、採用してもよい。変形例2のサブブロック545,4545及びS301,S4301では、全てのエリア画像56aを同時に表示させてもよい。
変形例3のサブブロック545,4545及びS301,S4301では、例えばユーザによる表示設定スイッチの操作に従って選択された外界センサ30の検知エリア30aに対応するエリア画像56aのみを、表示させてもよい。変形例4では、第二実施形態による各エリア画像56aのシーケンス表示を、第四実施形態のサブブロック545,4545及びS301,S4301において、採用してもよい。変形例5では、第三実施形態による各エリア画像56aのアニメーション表示を、第二実施形態又は第四実施形態のサブブロック545,4545及びS301,S4301において、採用してもよい。
変形例6のサブブロック545,4545及びS301,S4301では、図19に示すように、各検知エリア30aの最大検知距離Dを文字表記により示した文字画像を、各エリア画像56aに付して表示させてもよい。変形例7のサブブロック545,4545及びS301,S4301では、例えば最大検知距離Dの長い遠距離ミリ波レーダ305の検知エリア305aに対応したエリア画像56a等の表示に伴い、他のエリア画像56a及び自車両画像56sを縮小させてもよい。こうした変形例7では、各エリア画像56aの外周輪郭線のうち自車両画像56sから最も離間した部分までの離間距離同士の比を、それぞれ対応する検知エリア30aの最大検知距離D同士の比に対して、実質的に一致させることが可能となる。
変形例8のブロック543,4543及びS30,S4030では、サブブロック547及びS303を採用しなくてもよい。変形例9のブロック543,4543及びS30,S4030では、サブブロック546及びS302にて自車両画像56sを消去することで、当該画像56sと注意画像56cとの関連付けを解除してもよい。こうした変形例9では、先の変形例8を併せて採用してもよいし、採用しなくてもよい。
変形例10では、第一実施形態、第二実施形態又は第三実施形態のブロック543及びS30において、第四実施形態による第三オープニング表示モードMo3を、第一オープニング表示モードMo1に代えて実行してもよい。即ち、変形例10では、第一実施形態、第二実施形態又は第三実施形態のブロック543及びS30において、サブブロック546,547及びS302,S303を採用しなくてもよい。
変形例11のブロック544,4549,540及びS40,S4040,S60では、自車両画像56sを表示させることで、注意画像56cを当該画像56sに関連付けて表示させてもよい。こうした変形例11を適用した第四実施形態のブロック4548及びS4030においては、サブブロック546及びS302、又はサブブロック547及びS303を追加してもよい。尚、このようにサブブロック547及びS303を追加する場合には、ブロック4549及びS4040に代えて、ブロック544及びS40を採用してもよい。
変形例12のサブブロック546及びS302では、注意画像56cの全表示よりも後、又は当該全表示と同時に、エリア画像56aを全表示消去させてもよい。変形例13では、ブロック544及びS40を採用しなくてもよい。変形例14では、第四実施形態において、変形例13に代えて又は加えてブロック4549及びS4040を採用しなくてもよい。変形例15では、サブブロック547及びS303において、報知画像56iを表示させなくてもよい。
変形例16では、第四実施形態のブロック4541及びS4010において、同一日付におけるオープニング指令Oの検知回数以外を、判定条件としてもよい。こうした変形例16の判定条件としては、例えば工場出荷後における最初のオープニング指令Oからの累積検知回数又は経過時間、前回と今回とのオープニング指令Oの時間間隔、及びオープニング指令Oの検知場所等が、採用される。ここで、判定条件として累積検知回数が少ない場合にはブロック4543,544及びS30,S40により表示モードMo1,Mo2を実行し、当該累積検知回数が多い場合はブロック4548,4549及びS4030,S4040により表示モードMo3,Mo4を実行する。また、判定条件として経過時間が短い場合はブロック4543,544及びS30,S40により表示モードMo1,Mo2を実行し、当該経過時間が長い場合はブロック4548,4549及びS4030,S4040により表示モードMo3,Mo4を実行する。さらに、判定条件として時間間隔が長い場合はブロック4543,544及びS30,S40により表示モードMo1,Mo2を実行し、当該時間間隔が短い場合はブロック4548,4549及びS4030,S4040により表示モードMo3,Mo4を実行する。またさらに、判定条件として検知場所がユーザの自宅である場合はブロック4543,544及びS30,S40により表示モードMo1,Mo2を実行し、当該検知場所が自宅以外の場合はブロック4548,4549及びS4030,S4040により表示モードMo3,Mo4を実行する。
変形例17では、ブロック543,4543及びS30,S4030における画像56s,56a,56cの表示先として、HUD50及びコンビネーションメータ52のうち少なくとも一方を、MFD51に代えて又は加えて採用してもよい。こうした変形例17の表示先においては、ブロック544及びS40にて画像56iを表示させることになる。尚、このような表示先が「第一オープニング表示部」に相当する。
変形例18では、ブロック544,4549,540及びS40,S4040,S60における注意画像56cの移動先又は表示先として、MFD51及びコンビネーションメータ52のうち少なくとも一方を、HUD50に代えて若しくは加えて採用してもよい。ここで図20は、こうした移動先又は表示先に、HUD50及びコンビネーションメータ52の双方を採用した場合の変形例18を、示している。尚、このような移動先又は表示先が「第二オープニング表示部」に相当する。
変形例19では、HCU54を設けなくてもよい。こうした変形例19では、例えばECU31,42と、表示要素50,51,52の制御用に設けられる表示ECUとのうち、一種類又は複数種類を「車両用表示制御装置」として機能させてもよい。即ち、一種類又は複数種類のECUが有するプロセッサによりブロック541,542,543,544,540を構築して、「車両用表示制御方法」としての車両用表示制御フローを実現してもよい。ここで図21は、MFD51のうちプロセッサ54p及びメモリ54mを有したECU51eにより、「車両用表示制御装置」の機能を果たす場合の変形例19を、示している。
変形例20では、ソナー301,302、レーダ303,304,305及びカメラ306,307以外の外界センサ30、例えばレーザレーダ等を採用してもよい。変形例21では、外界センサ30が複数である限りにおいて、ソナー301,302、レーダ303,304,305及びカメラ306,307のうち少なくとも一つを、採用しなくてもよい。こうした変形例20,21によれば、エリア画像56aの表示数が自車両2の車種毎に変更されることで、ユーザは、当該車種に応じた安全性能の過不足を意識して、適切な運転行動に繋げることが可能となるのである。
変形例22のブロック543,544,540,4543,4548,4549及びS30,S40,S60,S4030,S4040では、音響ユニット5s及び振動ユニット5vのうち少なくとも一方を、表示と同時に作動させてもよい。変形例23では、HUD50での表示範囲50aの表示面積を、MFD51での表示範囲51aの表示面積と比べて、大きく又は等しく設定してもよい。
本開示に記載されるフローチャート、あるいは、フローチャートの処理は、複数の部(あるいはステップと言及される)から構成され、各部は、たとえば、S10と表現される。さらに、各部は、複数のサブ部に分割されることができる、一方、複数の部が合わさって一つの部にすることも可能である。さらに、このように構成される各部は、サーキット、デバイス、モジュール、ミーンズとして言及されることができる。
また、上記の複数の部の各々あるいは組合わさったものは、(i) ハードウエアユニット(例えば、コンピュータ)と組み合わさったソフトウエアの部のみならず、(ii) ハードウエア(例えば、集積回路、配線論理回路)の部として、関連する装置の機能を含みあるいは含まずに実現できる。さらに、ハードウエアの部は、マイクロコンピュータの内部に構成されることもできる。
本開示は、実施例に準拠して記述されたが、本開示は当該実施例や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範畴や思想範囲に入るものである。
Claims (12)
- 外界の障害物を検知する複数の外界センサ(30)と、情報を表示する表示ユニット(5d)とを搭載した自車両において、各前記外界センサに関するセンサ情報の前記表示ユニットでの表示を制御する車両用表示制御装置(54,51e)であって、
前記自車両に対するユーザからのオープニング指令(O)を検知するオープニング検知部(541,4541)と、
前記自車両を示す自車両画像(56s)と、各前記外界センサ毎に前記障害物を検知可能な検知エリア(30a)を前記自車両画像と関連付けて示す複数のエリア画像(56a)とを、記憶する画像記憶部(54m)と、
前記オープニング検知部により前記オープニング指令が検知された場合のオープニング期間(Po)において、前記画像記憶部から前記自車両画像及び各前記エリア画像を読出して、それらの画像を前記センサ情報として前記表示ユニットに表示させるオープニング制御部(542,543,544,4543,4548,4549)とを、備える車両用表示制御装置。 - 前記オープニング制御部は、前記自車両からの距離として前記検知エリアの最大検知距離(D)が短い前記外界センサ側から順に、各前記エリア画像を前記表示ユニットにシーケンス表示させる請求項1に記載の車両用表示制御装置。
- 前記オープニング制御部は、前記オープニング指令に応答して起動するのに要する起動時間(T)が短い前記外界センサ側から順に、各前記エリア画像を前記表示ユニットにシーケンス表示させる請求項1に記載の車両用表示制御装置。
- 前記オープニング制御部は、前記自車両画像とは離間する側へ次第に広がる動画状に、各前記エリア画像を前記表示ユニットにアニメーション表示させる請求項1~3のいずれか一項に記載の車両用表示制御装置。
- 前記画像記憶部は、前記ユーザによる前記自車両の運転リスクとして、前記自車両からの前記障害物の距離に依拠するリスクに対応させた注意レベルを示す注意画像(56c)を、記憶し、
前記オープニング制御部は、前記オープニング期間の前記表示ユニットにおいて前記エリア画像を、前記自車両画像と関連付けて表示させた後、前記画像記憶部から読出した前記注意画像へ切替える請求項1~4のいずれか一項に記載の車両用表示制御装置。 - 前記オープニング制御部は、前記エリア画像から切替えられる前記注意画像を、前記自車両画像と関連付けて前記表示ユニットに表示させる請求項5に記載の車両用表示制御装置。
- 前記オープニング制御部は、前記エリア画像を表示箇所にてフェードアウトさせつつ、前記注意画像を前記表示箇所にてフェードインさせる動画状に、それらの画像を前記表示ユニットにアニメーション表示させる請求項5又は6に記載の車両用表示制御装置。
- 前記オープニング制御部は、
前記表示ユニットのうち第一オープニング表示部(51)において前記エリア画像を、前記自車両画像と関連付けて表示させた後、前記注意画像へ切替える第一オープニング表示モード(Mo1)と、
前記表示ユニットのうち前記オープニング期間後に前記注意画像を表示させる第二オープニング表示部(50)へ、前記第一オープニング表示部における前記注意画像の表示を移動させる第二オープニング表示モード(Mo2)とを、前記オープニング期間に順次実行する請求項5~7のいずれか一項に記載の車両用表示制御装置。 - 前記オープニング制御部は、
前記第一オープニング表示部において、前記エリア画像から切替えられる前記注意画像を前記自車両画像と関連付けて表示させた後、前記自車両画像の消去により当該関連付けを解除する前記第一オープニング表示モードと、
前記第一オープニング表示部よりも表示面積の小さな前記第二オープニング表示部において、前記自車両画像との関連付けを解除された前記注意画像を表示させる前記第二オープニング表示モードとを、順次実行する請求項8に記載の車両用表示制御装置。 - 前記画像記憶部は、前記オープニング期間後に前記注意画像の前記注意レベルと関連付けて報知される報知内容の区別を示す報知画像(56i)を、記憶し、
前記オープニング制御部は、前記注意画像の表示を前記第一オープニング表示部から前記第二オープニング表示部へ移動させ、且つ前記報知画像を前記画像記憶部から読出して前記第一オープニング表示部に表示させる前記第二オープニング表示モードを、実行する請求項8又は9に記載の車両用表示制御装置。 - 前記オープニング制御部(542,544,4543,4548,4549)は、
前記オープニング検知部(4541)による前記オープニング指令の検知が同一日付において一回目となる場合の前記オープニング期間には、前記第一オープニング表示モードと前記第二オープニング表示モードとを順次実行する一方、
前記オープニング検知部による前記オープニング指令の検知が同一日付において二回目以降となる場合の前記オープニング期間には、前記第一オープニング表示モードのうち前記エリア画像から前記注意画像への切替えを禁止する第三オープニング表示モード(Mo3)と、前記第二オープニング表示部において前記注意画像を表示させる第四オープニング表示モード(Mo4)とを順次実行する請求項8~10のいずれか一項に記載の車両用表示制御装置。 - 外界の障害物を検知する複数の外界センサ(30)と、情報を表示する表示ユニット(5d)とを搭載した自車両において、各前記外界センサに関するセンサ情報の前記表示ユニットでの表示を制御する車両用表示制御方法であって、
前記自車両に対するユーザからのオープニング指令(O)を検知し(S10,S4010)、
前記オープニング指令が検知された場合のオープニング期間(Po)において、前記自車両を示す自車両画像(56s)と、各前記外界センサ毎に前記障害物を検知可能な検知エリア(30a)を前記自車両画像と関連付けて示す複数のエリア画像(56a)との記憶された画像記憶部から、前記自車両画像及び各前記エリア画像を読出して、それらの画像を前記センサ情報として前記表示ユニットに表示させる(S20,S30,S40,S4030,S4040)ことを、含む車両用表示制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/549,462 US10387734B2 (en) | 2015-02-09 | 2016-02-01 | Vehicle display control device and vehicle display control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-023616 | 2015-02-09 | ||
| JP2015023616A JP6417994B2 (ja) | 2015-02-09 | 2015-02-09 | 車両用表示制御装置及び車両用表示制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016129233A1 true WO2016129233A1 (ja) | 2016-08-18 |
Family
ID=56615471
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/000488 WO2016129233A1 (ja) | 2015-02-09 | 2016-02-01 | 車両用表示制御装置及び車両用表示制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10387734B2 (ja) |
| JP (1) | JP6417994B2 (ja) |
| WO (1) | WO2016129233A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106960582A (zh) * | 2017-03-12 | 2017-07-18 | 浙江大学 | 一种基于宏观基本图的区域瓶颈控制的方法 |
| CN109324329A (zh) * | 2017-08-01 | 2019-02-12 | 福特全球技术公司 | 用于驾驶危险检测的方法和设备 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6224029B2 (ja) * | 2015-05-21 | 2017-11-01 | 富士通テン株式会社 | 画像処理装置および画像処理方法 |
| JP6304272B2 (ja) * | 2016-02-04 | 2018-04-04 | トヨタ自動車株式会社 | 車両用注意喚起装置 |
| KR101846666B1 (ko) * | 2016-05-02 | 2018-04-06 | 현대자동차주식회사 | 측후방 주시 카메라 시스템 작동 제어장치 및 방법 |
| JP6194520B1 (ja) * | 2016-06-24 | 2017-09-13 | 三菱電機株式会社 | 物体認識装置、物体認識方法および自動運転システム |
| JP6616340B2 (ja) * | 2017-01-31 | 2019-12-04 | 矢崎総業株式会社 | 車両用表示装置および車両用表示装置の表示方法 |
| JP6819431B2 (ja) | 2017-04-12 | 2021-01-27 | トヨタ自動車株式会社 | 注意喚起装置 |
| KR102310379B1 (ko) * | 2017-06-09 | 2021-10-12 | 현대자동차주식회사 | 주행 정보 안내 장치 및 방법, 그리고 차량 시스템 |
| JP6954069B2 (ja) * | 2017-12-08 | 2021-10-27 | トヨタ自動車株式会社 | 車両用注意喚起装置 |
| FR3077876B1 (fr) * | 2018-02-12 | 2020-09-18 | Cad 42 Services | Procede et systeme de detection et d'evaluation de la dangerosite d'au moins une zone de danger |
| US11958358B2 (en) * | 2018-05-08 | 2024-04-16 | Sony Semiconductor Solutions Corporation | Image processing apparatus, moving apparatus, method, and program |
| US10967751B2 (en) * | 2019-05-10 | 2021-04-06 | Gm Global Technology Operations, Llc | Method to detect the proper connection of a vehicle charging cable |
| JP7121715B2 (ja) * | 2019-09-19 | 2022-08-18 | 本田技研工業株式会社 | 推定装置、推定方法、及びプログラム |
| WO2021107328A1 (ko) * | 2019-11-28 | 2021-06-03 | 삼성전자주식회사 | 주변 환경을 탐색하는 전자 장치 및 그 동작 방법 |
| CN113034954A (zh) * | 2021-03-03 | 2021-06-25 | 北京航迹科技有限公司 | 一种车辆预警方法和系统 |
| US11724645B1 (en) * | 2021-08-18 | 2023-08-15 | Paul Abernathy | Passenger safety system |
| US20230347876A1 (en) * | 2022-04-29 | 2023-11-02 | Rivian Ip Holdings, Llc | Adas timing adjustments and selective incident alerts based on risk factor information |
| EP4349631A1 (en) * | 2022-10-05 | 2024-04-10 | Volvo Truck Corporation | Vehicle interface system for driver assistance |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1199894A (ja) * | 1997-09-30 | 1999-04-13 | Mazda Motor Corp | 車両用障害物検出装置 |
| JP2005241511A (ja) * | 2004-02-27 | 2005-09-08 | Clarion Co Ltd | 車両周辺障害物警告装置及びこれに用いる信号処理装置 |
| JP2010023836A (ja) * | 2005-10-13 | 2010-02-04 | Denso Corp | 車両用表示装置 |
| JP2012188057A (ja) * | 2011-03-14 | 2012-10-04 | Panasonic Corp | 表示装置 |
| JP2015006820A (ja) * | 2013-06-24 | 2015-01-15 | マツダ株式会社 | 車両用情報表示装置 |
| JP2016033729A (ja) * | 2014-07-31 | 2016-03-10 | クラリオン株式会社 | 周囲環境認識装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6731204B2 (en) | 2002-02-19 | 2004-05-04 | Continental Teves, Inc. | Object detection system providing driver information through sound |
| JP4466580B2 (ja) | 2005-10-13 | 2010-05-26 | 株式会社デンソー | 車両用表示装置 |
| JP4986268B2 (ja) | 2008-04-23 | 2012-07-25 | 日本精機株式会社 | 車両用表示装置 |
| JP2011225189A (ja) | 2010-04-23 | 2011-11-10 | Kanto Auto Works Ltd | 車両故障警告装置及び車両故障警告システム |
| DE102011083770A1 (de) * | 2011-09-29 | 2013-04-04 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur rechnergestützten Verarbeitung des Nahfeldes eines Fahrzeugs |
| KR101583998B1 (ko) * | 2014-10-17 | 2016-01-19 | 현대자동차주식회사 | 주차지원장치 및 방법 |
-
2015
- 2015-02-09 JP JP2015023616A patent/JP6417994B2/ja not_active Expired - Fee Related
-
2016
- 2016-02-01 US US15/549,462 patent/US10387734B2/en active Active
- 2016-02-01 WO PCT/JP2016/000488 patent/WO2016129233A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1199894A (ja) * | 1997-09-30 | 1999-04-13 | Mazda Motor Corp | 車両用障害物検出装置 |
| JP2005241511A (ja) * | 2004-02-27 | 2005-09-08 | Clarion Co Ltd | 車両周辺障害物警告装置及びこれに用いる信号処理装置 |
| JP2010023836A (ja) * | 2005-10-13 | 2010-02-04 | Denso Corp | 車両用表示装置 |
| JP2012188057A (ja) * | 2011-03-14 | 2012-10-04 | Panasonic Corp | 表示装置 |
| JP2015006820A (ja) * | 2013-06-24 | 2015-01-15 | マツダ株式会社 | 車両用情報表示装置 |
| JP2016033729A (ja) * | 2014-07-31 | 2016-03-10 | クラリオン株式会社 | 周囲環境認識装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106960582A (zh) * | 2017-03-12 | 2017-07-18 | 浙江大学 | 一种基于宏观基本图的区域瓶颈控制的方法 |
| CN109324329A (zh) * | 2017-08-01 | 2019-02-12 | 福特全球技术公司 | 用于驾驶危险检测的方法和设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016146135A (ja) | 2016-08-12 |
| US20180032824A1 (en) | 2018-02-01 |
| US10387734B2 (en) | 2019-08-20 |
| JP6417994B2 (ja) | 2018-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6417994B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| US10663315B2 (en) | Vehicle display control device and vehicle display control method | |
| JP6372384B2 (ja) | 車間マネジメント装置及び車間マネジメント方法 | |
| WO2017068694A1 (ja) | 駐車支援方法及び駐車支援装置 | |
| US10249190B2 (en) | Vehicular display control apparatus and vehicular display control method | |
| JP6705335B2 (ja) | 車両用表示制御装置及び車両運転アシストシステム | |
| WO2022044768A1 (ja) | 車両用表示装置 | |
| WO2016129232A1 (ja) | 車速マネジメント装置及び車速マネジメント方法 | |
| JP2017166913A (ja) | 表示制御装置及び表示制御方法 | |
| JP6471575B2 (ja) | 車両用表示制御装置及び車両用表示ユニット | |
| WO2022230781A1 (ja) | 車両用報知制御装置及び車両用報知制御方法 | |
| JP7310851B2 (ja) | 車両用表示装置 | |
| JP2023138849A (ja) | 提示制御装置及び提示制御プログラム | |
| WO2021251468A1 (ja) | 画像処理装置 | |
| JP2022176869A (ja) | 自動運転制御装置、及び自動運転制御プログラム | |
| JP7333230B2 (ja) | 車両の制御方法及び車両の制御装置 | |
| WO2023026707A1 (ja) | 車両用制御装置及び車両用制御方法 | |
| JP7334768B2 (ja) | 提示制御装置及び提示制御プログラム | |
| WO2024181080A1 (ja) | 車両用制御装置及び車両用制御方法 | |
| WO2023157515A1 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| WO2024172121A1 (ja) | 自動運転制御装置、自動運転制御プログラム、及び自動運転制御方法 | |
| WO2022244548A1 (ja) | 自動運転制御装置、及び自動運転制御プログラム | |
| JP2023033097A (ja) | 車両用制御装置及び車両用制御方法 | |
| JP2023121723A (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| JP2022169455A (ja) | 車両用報知制御装置及び車両用報知制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16748881 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16748881 Country of ref document: EP Kind code of ref document: A1 |