Verfahren zur Verminderung von Rupfschwingungen einer Reibungskupplung in einem
Antriebsstrang eines Kraftfahrzeugs
Die Erfindung betrifft ein Verfahren zur Verminderung von Rupfschwingungen einer von einem Kupplungsaktor automatisiert anhand einer einem zu übertragenden Kupplungsmoment zugeordneten Kupplungssollmoment gesteuerten, in einem Antriebsstrang eines Kraftfahrzeugs zwischen einer Brennkraftmaschine und einem Getriebe angeordneten Reibungskupplung mit einem infolge zeitweise auftretender Rupfschwingungen schwingungsbehafteten Kupplungsistmoment. Automatisierte Reibungskupplungen in einem Antriebsstrang eines Kraftfahrzeugs zwischen einer Brennkraftmaschine und einem Getriebe sind seit Langem bekannt. Hierbei verlagert anstatt des Fußes eines Fahrers ein mittels einer Steuereinrichtung gesteuerter Kupp- lungsaktor ein Betätigungselement, beispielsweise einen Kupplungshebel, eine Tellerfeder, eine Hebelfeder oder dergleichen entlang eines Betätigungsweges. Dem Betätigungsweg ist eine beispielsweise an äußere Verhältnisse wie Kupplungstemperatur, den Reibeigenschaften der Kupplungsbeläge, Betriebszeit und dergleichen anpassbare und beispielsweise mittels eines Tastpunkts auf den Betätigungsweg kalibierbare Momentenkennlinie zugeordnet. Beispielsweise abhängig von der vom Fahrer gewünschten oder aus einer Getriebesteuerung resultierenden Betriebssituation der Reibungskupplung wird von einer Steuereinheit ein Kupplungssollmoment oder eine mit dieser verbundene Größe ermittelt und als Steuergröße zur Einstellung eines dem Kupplungssollmoment entsprechenden Betätigungswegs des Kupplungsaktors aus- gegeben. Je nach Ausbildung des Kupplungsaktors kann diese Größe bei elektrischem Antrieb des Kupplungsaktors eine elektrische Größe wie Spannung, Strom
oder Pulsweite einer Versorgungsspannung oder ein Druck, ein Volumenstrom oder dergleichen bei einem hydraulisch oder pneumatisch betriebenen Kupplungsaktor sein. Die Einstellung des Betätigungswegs kann mittels relativer und/oder absoluter Wegsensoren überwacht oder geregelt werden.
An derartigen Reibungskupplungen können bedingt durch die geometrischen, nicht dem Idealzustand entsprechenden Eigenschaften und Fertigungstoleranzen, beispielsweise zu ungleichem Reibeingriff führende Winkel- und/oder Achsversätze zwischen den Reibpartnern der Reibungskupplung, so genannte Rupfschwingungen auftreten, bei deren Auftreten dem aufgrund des vorgegebenen Kupplungssollmoments eingestellten Kupplungsmoment ein Kupplungsstörmoment mit einer vorgegebenen Amplitude und Frequenz überlagert wird, welches zu Komfortstörungen des Kraftahrzeugs und erhöhtem Verschleiß führen kann. Zur Verminderung derartiger Rupfschwingungen ist beispielsweise aus der DE 10 2012 217 132 A1 ein Verfahren bekannt, bei dem die Frequenz, Amplitude und Phase einer dem Getriebeeingangssignal überlagerten Schwingung ermittelt wird. Abhängig von der ermittelten Frequenz wird hierbei ein verstärktes und phasenverschobenes Signal gleicher Frequenz erzeugt und als Steuersignal auf das Kupplungssollmoment moduliert, um Schwingungen des Getriebeeingangssignals auszulöschen. Beim Auftreten mehrerer Frequenzanteile mit vergleichbarer Amplitude im ermittelten Bereich kann diese Kompensation zu einem schwer kontrollierbaren Verhalten führen. Findet zudem ein Phasensprung im Getriebeeingangssignal statt, ist eine Frequenzbestimmung schwierig, ebenso bei sich stark ändernder Amplitude oder Frequenz, da Amplituden-, Phasen- und Frequenzmodulation miteinander zusammenhängen.
In der DE 10 2013 204 698 A1 wird ein Verfahren offenbart, um Triebstrangschwin- gungen in allgemeiner Form durch eine Tilgung einer Resonanzfrequenz zu dämpfen.
Mittels dieses Verfahrens ist eine Verringerung der geometrisch bedingten Rupfschwingungen nur begrenzt möglich. Zwar lassen sich durch Anpassung von Filterparametern bekannte Anregungsfrequenzen variieren, um eine Optimierung für diese Anregung durchzuführen, doch können dadurch weitere Anregungsfrequenzen ver- stärkt, beispielsweise ein geometrisch bedingtes Rupfen in einer anderen Frequenz gefördert werden.
Aus der nicht vorveröffentlichten deutschen Patentanmeldung Nr. 10 2013 206 446.2 ist ein Verfahren zur Verminderung von Rupfschwingungen einer von einem Kupplungsaktor automatisiert anhand einer einem zu übertragenden Kupplungsmoment zugeordneten Kupplungssollmoment gesteuerten, in einem Antriebsstrang eines Kraftfahrzeugs zwischen einer Brennkraftmaschine und einem Getriebe angeordneten Reibungskupplung bekannt. Hierbei werden ein Kupplungsistmoment überlagernde Rupfschwingungen korrigiert, indem aus einem Übertragungsverhalten des Kupplungsistmoments eine absolute Amplitude und eine Phase eines am Ausgang der Reibungs- kupplung ermittelten, einem Regler zugeführten Eingangssignals ermittelt werden, aus diesen ein phasenselektives Störmoment bestimmt, aus diesem ein phasenrichtiges Korrekturmoment bestimmt und mit diesem das Kupplungssollmoment mittels eines das Kupplungsistmoment mit dem Korrekturmoment regelnden Reglers korrigiert wird. Aufgabe der Erfindung ist die vorteilhafte Weiterbildung eines derartigen Verfahrens. Die Aufgabe wird durch die Merkmale des Verfahrens gemäß Anspruch 1 gelöst. Die von diesem abhängigen Ansprüche geben vorteilhafte Ausführungsformen des Verfahrens des Anspruchs 1 wieder.
Das vorgeschlagene Verfahren dient der Verminderung von Rupfschwingungen einer von einem Kupplungsaktor automatisiert anhand einer einem zu übertragenden Kupp- lungsmoment zugeordneten Kupplungssollmoment gesteuerten, in einem Antriebs-
Strang eines Kraftfahrzeugs zwischen einer Brenn kraftmasch ine und einem Getriebe angeordneten Reibungskupplung mit einem infolge zeitweise auftretender Schwingungen schwingungsbehafteten Kupplungsistmoment. Die Rupfschwingungen werden erfasst, indem aus einem Übertragungsverhalten des Kupplungsistmoments eine ab- solute Amplitude und eine Phase eines am Ausgang der Reibungskupplung erfassten Eingangssignals ermittelt werden. Hierzu kann ein Lock-In-Regler angewendet werden, der die aus dem Eingangssignal, beispielsweise einer Getriebeeingangsdrehzahl, einer Längsbeschleunigung des Kraftfahrzeugs oder dergleichen, gewonnenen phasenselektiven Größen Amplitude und Phasenlage regelt. Der Regler sowie gegebe- nenfalls vor- und/oder nachgeschaltete Filter und/oder Berechnungseinheiten bestimmen aus diesen ein phasenselektives Störmoment und ein entsprechend korrelierendes phasenrichtiges Korrekturmoment. Mit diesem Korrekturmoment wird das Kupplungsistmoment korrigiert, indem der Regler das Korrekturmoment in das Kupplungssollmoment einspeist. Hierbei wird zur Anpassung des Korrekturmoments an das schwingungsbehaftete Eingangssignal, dessen Phasenlage, Amplitude, an das ermittelte Störmoment und dergleichen das Korrekturmoment insbesondere phasenselektiv mittels eines vorgebbaren Verstärkungsfaktor gewichtet.
Auf diese Weise kann beispielsweise mittels des Verstärkungsfaktors vorgegeben werden, wie viel der aus dem Eingangssignal ermittelten wie identifizierten Schwin- gungsamplitude kompensiert wird. Die Vorgabe der Größe des Verstärkungsfaktors kann dabei einem gezielten Ausblenden/Abschalten in kritischen oder nicht regelbaren Situationen, in denen eine stabile Arbeitsweise des Reglers beispielsweise infolge eines instabilen Eingangssignals erwartet wird, dienen.
Eine stabile beziehungsweise sinnvolle Antirupfregelung zur Vermeidung oder
Dämpfung von Rupfschwingungen ist nicht in jedem Betriebszustand vorteilhaft. Bei-
spielsweise ist eine Antirupfregelung nur bei schlupfender Reibungskupplung gegeben, da Rupfschwingungen nur in diesem Betriebszustand typischerweise auftreten, da das von der Reibungskupplung übertragbare Kupplungsmoment ausschließlich in diesem Betriebszustand auch von dem tatsächlichen übertragenen Kupplungsmoment abhängt. Weiterhin treten Betriebszustände auf, bei denen das
Antriebsstrangverhalten nur unzureichend bekannt ist und damit das Eingangssignal nicht so ermittelt werden kann, dass eine stabile Arbeitsweise des Reglers erwartet werden kann.
Der Verstärkungsfaktor kann abhängig von zumindest einer innerhalb des Verfahrens vorhandenen Größe vorgegeben werden. Eine vorteilhafte Ausführungsform des Verfahrens sieht beispielsweise eine Antirupfstrategie vor, bei der ein linear arbeitender Regler beispielsweise in Form eines parametrisierbaren Softwaretilgers und ein Lock- In-Regler kombiniert ist. Hierbei geht eine effektive Frequenzantwort des Systems, welches beispielsweise aus der Kupplungssteuerung, dem Kupplungsaktor mit der Betätigungsmechanik, der Reibungskupplung sowie dem sich anschließenden, eine schwingungsfähige Last gegenhaltenden Antriebsstrang gebildet sein kann, bei aktivem Softwaretilger in den Lock-In-Regler ein. Da hierbei die im Lock-In-Regler hinterlegte, beispielsweise zu der Störung inverse Frequenzantwort nur bei aktivem Softwaretilger ausreichend bekannt ist, wird der Lock-In-Regler zusammen mit diesem über eine situationsabhängige Gesamtverstärkung ausgeblendet. Dies geschieht in Form einer Limitierung eines dem Lock-In-Regler eigenen Verstärkungsfaktors auf diese Gesamtverstärkung.
Dieser Verstärkungsfaktor kann von internen, das heißt innerhalb des Verfahrens bearbeiteten Parametern und Größen abhängig gemacht werden. Beispielsweise kann ein Kennfeld mit einer entsprechenden Wichtung des Verstärkungsfaktors vorgegeben
werden, das von der identifizierten Amplitude und einer Referenzfrequenz des Lock- In-Reglers abhängig ist. Weiterhin können Betriebszustände auftreten, die auf interne Größen und Parameter des Verfahrens zurückzuführen sind, bei denen vorteilhafterweise der Lock-In-Regler abgeschaltet oder der Verstärkungsfaktor abgesenkt wird. Beispielsweise kann der Verstärkungsfaktor abhängig von der Referenzfrequenz vorgegeben werden, da für niedrige und hohe Frequenzen die Frequenzantwort unzureichend bekannt ist. Beispielsweise können bei niedrigen Frequenzen unterhalb typischer Rupffrequenzen Wechselwirkungen mit der übrigen Fahrstrategie auftreten, bei hohen Frequenzen oberhalb der typischen Rupffrequenzen können die Phasengenau- igkeit und die Dynamik des Kupplungssystems unzureichend und daher schlecht vorhersagbar sein.
Weiterhin kann eine Abhängigkeit des Verstärkungsfaktors von der identifizierten Schwingungsamplitude bestimmt und gegebenenfalls berücksichtigt werden. Beispielsweise kann bei kleinen Amplituden der Verstärkungsfaktor gegebenenfalls bis auf Null (keine Wirkung des Reglers) abgesenkt werden, da der Kupplungsaktor mit seinem Stellsystem aufgrund mangelnder Auflösung, Hysterese und dergleichen gegebenenfalls nicht exakt genug geregelt werden kann.
Desweiteren kann aufgrund der kaum wahrnehmbaren Störung bei kleinen Amplituden wie Störamplituden auf eine Regelung verzichtet werden, da diese gegebenen- falls durch den Fahrer oder Insassen des Kraftfahrzeugs gar nicht wahrnehmbar sind. Bei entsprechend hohen Amplituden kann der Regler beispielsweise abgeschaltet werden oder der Verstärkungsfaktor gegebenenfalls bis auf Null reduziert werden, da ein zugrunde gelegtes lineares Verhalten nicht mehr gesichert ist und die Reibungskupplung einen Defekt aufweisen kann.
Gemäß einer weiteren vorteilhaften Ausführungsform des Verfahrens kann der Verstärkungsfaktor abhängig von einer außerhalb des Verfahrens vorgegebenen Größe vorgegeben werden, beispielsweise abgeschwächt oder zu Null gesetzt werden. Beispielsweise kann der Verstärkungsfaktor von einer übergeordneten Strategie, bei- spielsweise einem übergeordneten Steuergerät limitiert werden. In diesem Sinne kann das Verfahren eine Schnittstelle aufweisen, in die weitere Steuerprogramme des Kraftfahrzeugs eingreifen können. Beispielsweise können derartige Zugriffe seitens des Herstellers des Kraftfahrzeugs erfolgen, um Zugriff auf das Verfahren zu nehmen. Der Zugriff kann beispielsweise Betriebszustände wie beispielsweise eine Erstinbe- triebnahme am Bandende (EOL) oder dergleichen beinhalten.
Alternativ oder zusätzlich zu einer Begrenzung des Korrekturmoments mittels eines Verstärkungsfaktors kann das Eingangssignal bezüglich seiner Regelqualität geprüft und bei fehlender Qualität der Regler in seinen Ursprungszustand zurückversetzt werden. Hierbei kann bei nicht verwendbaren Eingangssignalen eine Neuinitialisierung des Reglers erfolgen. Beispielsweise kann die Identifikation von Rupfschwingungen reglerbedingt eine Form von Gedächtnis aufweisen und auf der Filterung kontinuierlicher Signale beruhen. Wenn die Qualität des Eingangssignals beispielsweise aufgrund einer der begrenzten Signalerfassungsrate von Sensoren, Störungen auf dem Eingangssignal und dergleichen unterhalb einer vorgegebenen Qualitätsschwelle liegt, kann die Regelung der Rupfschwingungen ausgeblendet werden, indem der Regler abgeschaltet und eine Löschung dessen Gedächtnisses beispielsweise in Form integrativer Anteile, Filterinhalte und dergleichen stattfindet.
In einer bevorzugten Ausführungsform des Verfahrens erfolgt eine Bestimmung von Schwingungsanteilen des Eingangssignals äquidistant in einem Phasenraum einer Referenzfrequenz. Hierdurch kann der Regler unter Schonung der den Regler darstel-
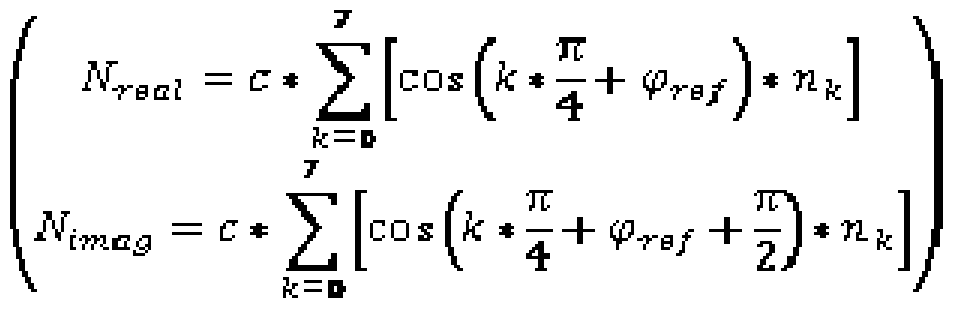
lenden Prozessorresourcen ausgebildet werden. Eine Bestimmung von Frequenzanteilen ist mit relativ hohem Rechenaufwand verbunden. Beispielsweise können rechenaufwendige trigonometrische Funktionen, Mittelung über einen Puffer und dergleichen notwendig werden. Es wird daher vorgeschlagen, für die Regelung Zeiger vorzusehen, die entsprechend einer komplexen Fourier-Komponente für die Fundamentalfrequenz einer sogenannten diskreten Fouriertransformation berechnet werden. Die Fundamentalfrequenz ist hierbei zeitlich veränderlich und kann durch eine Referenzfrequenz, beispielsweise die Drehzahl der Brennkraftmaschine des Antriebsstrangs, die Getriebeeingangs- oder Schlupfdrehzahl zwischen Drehzahl der Kurbel- welle und Getriebeeingangsdrehzahl vorgegeben werden. Dabei kann das Eingangssignal, beispielsweise die Getriebeeingangsdrehzahl einer fortlaufenden Phase zugeordnet werden, die sich durch Integration, beispielsweise Summation der Referenzfrequenz über die Zeit ergibt. Dabei kann eine Bestimmung mit hinreichender und gleichbleibender Qualität erzielt werden, indem diese Zuordnung in Form einer Nach- abtastung der entsprechenden Eingangssignale zu Zeitpunkten erfolgt, die äquidistan- ten Phasenschritten entsprechen. Als vorteilhaft haben sich beispielsweise acht Abtastpunkte pro Periode, beispielsweise als π/4-Schritte, erwiesen. Die Bestimmung der Fourier-Komponenten erfolgt in Form zweier Summen:
mit
ψτΒί ~ * 4 , ganzzahligem ι , dem Normierungsfaktor c und dem Puffer über die acht letzten nachabgetasteten Eingangssignale
n k . Hierbei sei angemerkt, dass hierbei
gilt, so dass sich eine Berechnung trigonometrischer Funktionen auf acht Stützstellen der Kosinusfunktion beschränkt, was sich sehr effizient über eine Wertetabelle umset- zen lässt. Weiterhin kann eine Neuberechnung der Summen bei jedem Abtastschritt entfallen, da sich nur deren Randwerte unterscheiden, das heißt, es wird von der letzten Summe nur der älteste Wert subtrahiert und der neueste Wert im Sinne eines gleitenden Mittels addiert. Weiterhin weisen die Summanden aufgrund der
periodischen Kosinusfunktion denselben Vorfaktor auf.
Die Darstellung von Schwingungsanzeigen kann in Form von Zeigern mit einer
Amplitude und einer Phasenlage in Bezug auf den Phasenraum erfolgen und mittels dieser das Störmoment ermittelt werden. Die Schwingungsanteile werden hierbei in Form von Zeigern behandelt, die die Amplitude und Phasenlage in Bezug auf die Referenzfrequenz darstellen. Eine Interpretation als komplexe Zahlen ermöglicht auch eine effiziente Darstellung von Amplituden- und Phasenkompensationen beziehungsweise als Vorsteuerungen im Sinne entsprechender Zeiger, beispielsweise Dreh- und Streckzeigern. Indem ein zu einer Referenzfrequenz gehöriger Schwingungsanteil in Form eines Zeigers ausgedrückt wird, ergeben sich rechnerisch einfache Möglichkeiten der Manipulation zur Kompensation oder Vorsteuerung typischer Einflüsse. Vor- teilhaft ist die Beschreibung in Form komplexer Zahlen. Eine Transformation in Form einer Verstärkung A und einer Phasendrehung φ lässt sich durch die komplexe Zahl z = A * cosGp)+ i * Λ * sin(<p)
ausdrücken, wobei günstigerweise für eine Transformation nicht die Amplitude A und Phase, sondern direkt der Real- und Imaginärteil verwendet werden. Die Transforma- tion eines bestimmten Zeigers in komplexer Darstellung bedeutet dann eine komplexe
Multiplikation mit dem Transformationszeiger. Diese Vorgehensweise kann beispielsweise der Verwendung von Vektoren und Matrizen entsprechen, wobei die Transformationsmatrizen nur aus zwei unabhängigen Komponenten bestehen.
Gemäß einer vorteilhaften Ausführung des Verfahrens kann aus dem Kupplungssoll- moment und aus dem Kupplungsistmoment eine Frequenzantwortfunktion eines sich ändernden Übertragungsverhaltens ermittelt werden und bei sich änderndem Übertragungsverhalten eine von diesem abhängige Vorsteuerung des Korrekturmoments vorgesehen werden. Hierzu kann eine vorteilhafte Vorsteuerung die Kompensation des veränderlichen Übertragungsverhaltens eines Aktorteilsystems, beispielsweise den Lageregler des Kupplungsaktors bei Frequenzänderung betreffen.
Hierbei identifiziert der Lock-In-Regler aufgrund eines Schwingungszeigers beispielsweise der Getriebeeingangsdrehzahl, der hinterlegten Frequenzantwort und dem geschlossenen Regelkreis einen Schwingungszeiger für das Kupplungssollmoment. Der Regler basiert auf der Annahme, dass eine hinreichend (phasen-)stabile geometrische Störung auf dem Kupplungsistmoment besteht. Zwischen Kupplungssollmoment und Kupplungsistmoment wird hierbei eine Beziehung vorausgesetzt, die näherungsweise durch eine Frequenzantwortfunktion ausgedrückt werden kann. Diese Frequenzantwortfunktion wird bei Änderung der Referenzfrequenz bestimmt, wobei ein Transformationszeiger berechnet wird, der als Vorsteuerung bei Frequenzänderung die erwar- tete Änderung des identifizierten Sollmomentenzeigers repräsentiert. Es hat sich als vorteilhaft erwiesen, den Transformationszeiger in der Form eines festen Zeigers zu hinterlegen, der mit der beispielsweise gefilterten Ableitung der Referenzfrequenz multipliziert wird. Der feste Zeiger wird im Fall einer Doppelkupplung in bevorzugter Weise getrennt für jede der beiden Reibungskupplungen bestimmt und hinterlegt. AI-
ternativ kann der feste Zeiger auf verschiedene Reglereinstellungen des Kupplungslagereglers abgestimmt werden.
Gemäß einer weiteren Ausführungsform kann eine durch eine sensorische Erfassung des Eingangssignals bedingte Phasenverschiebung korrigiert werden. Hierbei wird ei- ne Kompensation beziehungsweise Korrektion typischer Zeitverzögerungen des Eingangssignals, die bei einer Drehzahlerfassung über die Detektion der Zeitdifferenz beispielsweise zwischen zwei Zahnradzähnen entsteht, kompensiert. Beispielsweise kann eine derartige Zeitdifferenz aufgrund der typischen Ausführung eines Drehzahlsensors in Form eines Hall-Sensors entstehen, der vorbeistreichende Zähne ei- nes Zahnrades detektiert und deren Zeitdifferenz nutzt, um eine Drehzahl zu bestimmen. Hierbei erhält das gemessene Drehzahlsignal eine zeitliche Verschiebung zur physikalischen Drehzahl, die umgekehrt proportional zur Drehzahl ist. Dies wirkt sich in der effektiven Frequenzantwort des Reglers als Phasenverschiebung aus, die für eine bestimmte Drehzahl proportional zur beobachteten Frequenz ist. In vorteilhafter Weise wird diese ermittelbare Beziehung der Phasenverschiebung zur Korrektur der hinterlegten Frequenzantwortfunktion verwendet. Hierzu wird die Phasenverschiebung bei einer vorgegebenen Drehzahl bestimmt und auf die anderen auftretenden Drehzahlen umgerechnet. Um diese Korrektur effizient zu berechnen, ohne trigonometrische Funktionen einzusetzen, wird die Berechnungsfunktion linearisiert, um eine zent- rale Bezugsfrequenz nD[rpm] zu erhalten. Der analytisch berechnete Korrekturzeiger ergibt sich hierbei nach: cosO„)\
sm(<pn) }
mit
60
mit der aktuellen Referenzfrequenz nref und
60 60
öt = mit der aktuellen Drehzahl ni
ps und der Zähnezahl N
z am Zahnrad. Indem man die hinterlegte Frequenzantwort auf die Bezugsfrequenz korrigiert, beziehungsweise bei dieser bestimmt, lässt sich der Korrekturzeiger um diese Bezugsfrequenz gut nähern:
Um einen ausgewogenen Fehler zwischen beispielsweise bei 200rpm und sehr gro- ßen Drehzahlen zu erhalten, kann die Bezugsfrequenz in der effektiven Mitte des Kehrwerts, beispielsweise bei 400rpm vorgesehen werden.
Gemäß einer weiteren vorteilhaften Ausführungsform ist der Regler als Integral regier ausgebildet und das Korrekturmoment wird als Summensignal aus einem bereits ausgegebenen phasenselektiven Korrekturmoment und einem aktuell aus dem Eingangs- Signal ermittelten Restmoment gebildet. Beispielsweise wird ein Integralregler in Form einer PT1 -Filterung eines Summensignals vorgesehen, aus dem Zeiger des bereits vom Regler modulierten Korrekturmoments und der aus der verbleibenden Drehzahl identifizierten Schwingung und dem aus diesem bestimmten Restmoment gebildet. Hierbei kann ein Integral regier derart ausgebildet werden, dass eine Abweichung vom Ziel des zu korrigierenden Kupplungssollmoments mit einer vorgegebenen Gewichtung auf das bereits ausgegebene Regelsignal wie Korrekturmoment hinzugefügt wird. Im Fall eines Lock-In-Reglers kann dieses Vorgehen auf den ausgegebenen Schwingungszeiger angewendet werden. Alternativ kann die Summe aus dem bereits ausgegebenen Signal und einem noch vorhandenen Restschwingungszeiger gebildet wer-
den und mittels einer PT1 -Filterung gefiltert werden. In vorteilhafter Weise kann dadurch ohne zusätzlichen Rechenaufwand ein gefilterter Zeiger für die identifizierte Schwingung gewonnen werden, falls aufgrund eines vorgegebenen Verstärkungsfaktors kleiner eins nicht das vollständige ermittelte Korrekturmoment auf das Kupp- lungssollmoment moduliert werden soll. Beispielsweise kann diese Ausführungsform bei kleinen identifizierten Amplituden den Verstärkungsfaktor selbst herunterzusetzen. Für eine phasenrichtige Modulation des Summensignals auf das Kupplungssollmoment kann das phasenselektive Korrekturmoment gegenüber dem Restmoment mittels einer Zeitverzögerung phasenselektiv ausgebildet werden. Hierbei wird der Schwingungszeiger des bereits modulierten Korrekturmoments verzögert, um die Verzögerung bei der Identifikation des Restmoments auszugleichen. Bei der Summenbildung des bereits ausgegebenen Schwingungszeigers und des Restschwingungszeigers wird dabei auf eine phasenrichtige Summation geachtet. Hierzu wird beispielsweise der Restschwingungszeiger durch Mittelung über die letzte Periode der Refe- renzfrequenz gewonnen und wird gegenüber dem aktuell ausgegebenen Schwingungszeiger um einen geeigneten Phasenwinkel verzögert. In vorteilhafter Weise erfolgt dies mittels einer identischen Mittelung oder beispielsweise mittels einer einfachen Verzögerung um eine halbe Periodendauer.
Die Erfindung wird anhand des in den Figuren 1 bis 3 dargestellten Ausführungsbei- spiels näher erläutert. Dabei zeigen:
Figur 1 ein Blockschaltbild zur Durchführung des vorgeschlagenen Verfahrens, Figur 2 ein Detail des Blockschaltbilds der Figur 1 mit einer Transformation eines
Drehzahlzeigers in einen Momentenzeiger
und
Figur 3 ein Detail des Blockschaltbilds der Figur 1 mit einer Kompensation von
Phasenunterschieden.
Die Figur 1 zeigt das Blockschaltbild 1 zur Steuerung einer Reibungskupplung. Hierbei wird aus einer Fahrstrategie ein Kupplungssollmoment M(s) eingespeist und in der Kupplungssteuerung 2 in einem Lageregler das Wegsignal, beispielsweise in Form der Steuerspannung V(c) an den Kupplungsaktor mit der Reibungskupplung 3 ausgegeben. Die Reibungskupplung 3 überträgt ein eingestelltes Kupplungsistmoment M(i) und ist von dem Störmoment M(e) überlagert, welches beispielsweise durch
geometrische Kupplungsfehler und dergleichen erzeugt wird. Mittels des Störmoments M(e) wird der Lageregler der Reibungskupplung 3 laufend nachgeregelt. Hieraus resultiert an dem Getriebeeingang 4 die Getriebeeingangsdrehzahl n(g). Aufgrund des Rupfverhaltens der Reibungskupplung 3 entstehen drehzahlabhängig und abhängig vom dynamischen Verhalten des Antriebsstrangs und dergleichen beispielsweise bei Anfahr- und Kriechvorgängen sowie beim Einkuppeln nach Schaltvorgängen des Getriebes Rupfschwingungen, die mittels des Reglers 5 korrigiert werden. Hierzu werden mittels des Reglers 5, beispielsweise einem Lock-In-Regler, die Rupfschwingungen an dem Getriebeeingang identifiziert und in ein phasenselektives Korrekturmoment M(k) gewandelt, mit welchem an dem Knotenpunkt 6 das Kupplungssollmoment M(s) korrigiert wird, wodurch die Rupfschwingungen zumindest gedämpft werden.
Der Regler 5 wandelt im Block 7 abhängig von der Referenzfrequenz fref, die beispielsweise als Schlupffrequenz der Reibungskupplung 3, als Getriebeeingangsdrehzahl n(g), als Drehzahl der Brennkraftmaschine oder dergleichen eingespeist wird, den identifizierten Schwingungsanteil in die Phasendomäne. In Block 8 erfolgt eine Bestimmung der Fourier-Komponenten der Schwingungsanteile. In Block 9 folgt eine
Wandlung der Schwingungsanteile in Momentenanteile. In Block 10 erfolgt die Regelung der Momentenanteile beispielsweise in Form einer Integralregeleinheit. In Block 1 1 erfolgt die Zuordnung der Phasenlage der Momentenanteile anhand der Referenzfrequenz fref und Ausgabe des phasenselektiven Korrekturmoments M(k).
Die Figur 2 zeigt den Block 9 der Figur 1 im Detail. In Block 9 erfolgt die Transformation der Drehzahlzeiger Zd in Momentenzeiger Zm. Hierbei wird eine beispielsweise durch einen Drehzahlsensor hervorgerufene Phasenverschiebung des Drehzahlzeigers Zd korrigiert. Hierbei wird der Transformationszeiger Zt aus der hinterlegten, beispielsweise gespeicherten Frequenzantwort mittels des aus der Referenzfrequenz fref und der Getriebeeingangsdrehzahl n(g) gebildeten Korrekturzeigers Zk am Knotenpunkt 13 korrigiert. Der Transformationszeiger Zt transformiert den Drehzahlzeiger Zd in den Momentenzeiger Zm am Knotenpunkt 14.
Die Figur 3 zeigt den Block 10 der Figur 1 im Detail. In den als Integralregeleinheit dienenden Block 10 wird der bereits in Block 9 bezüglich einer Phasenverschiebung durch den Drehzahlsensor korrigierte Momentenzeiger Zm eingespeist. Durch den PT1 -Filter 15 wird der Momentenzeiger Zm auf den gefilterten Ausgang Zmi reduziert. Das gefilterte Ausgangssignal Zmi stellt quasi das Gedächtnis des Filters dar: Neue Werte werden in jedem Ausführungsschritt mit dem bisherigen Filterwert gewichtet summiert und danach in den Eingang des PT1 -Filters 15 eingespeist. Hierzu wird das gefilterte Ausgangssignal Zmi in einer Regelschleife an dem Knotenpunkt 16 mit dem Korrekturzeiger Zs multipliziert. Der Korrekturzeiger Zs wird aus in dem Block 17 vorgehaltenen differentiellen Korrekturzeigerkoeffizienten und einer in Block 18 nach der Zeit differenzierten Referenzfrequenz in dem Knotenpunkt 19 gebildet und vor dem PT1 -Filter 15 eingespeist. Vor dem Ausgang des mittels der Zeiger gefiltertes Ausgangssignal Zmi und Korrekturzeiger Zs des phasenselektiven Korrekturmoments
M(k) aus dem Block 10 ist der Block 12 zur Wichtung des Korrekturmoments M(k) vorgesehen. Hierbei kann das Korrekturmoment M(k) in Block 10 abhängig von äußeren oder inneren Parametern und Größen gewichtet werden, um einen negativen Einfluss des Reglers 5 auf das Kupplungssollmoment M(s) (Fig. 1 ), beispielsweise bei unsicherem Eingangssignal in Form der Getriebeeingangsdrehzahl n(g) (Fig. 1 ) oder dergleichen und/oder bei gewünschtem Eingriff von außen zu begrenzen oder den Regler 5 abzuschalten. Um das Korrekturmoment M(k) und den aus dem gefilterten Ausgangssignals Zmi und dem Korrekturzeigers Zs gebildeten phasenberichtigten Momentenzeiger Zp aufeinander in die exakte Phasenlage zu synchronisieren, wird in dem Block 20 das Korrekturmoment M(k) verzögert. Die Verzögerung erfolgt um eine halbe Periode der Referenzfrequenz fref, wobei ein durch ein gleitendes Mittel bei der Fourier-Komponentenbestimmung erzeugter Zeitverzug des Drehzahlzeigers hier kompensiert wird.
Bezuqszeichenliste
1 Blockschaltbild
2 Kupplungssteuerung
3 Reibungskupplung
4 Getriebeeingang
5 Regler
6 Knotenpunkt
7 Block
8 Block
9 Block
10 Block
1 1 Block
12 Block
13 Knotenpunkt
14 Knotenpunkt
15 PT1 -Filter
16 Knotenpunkt
17 Block
18 Block
19 Knotenpunkt
20 Block
fref Referenzfrequenz
M(e) Kontroll moment
M(i) Kupplungsistmoment
M(k) Korrekturmoment
M(s) Kupplungssollmoment
n(g) Getriebeeingangsdrehzahl
V(c) Steuerspannung
Zd Drehzahlzeiger
Zk Korrekturzeiger
Zm Momentenzeiger
Zmi Ausgangssignal
Zp Momentenzeiger
Zs Korrekturzeiger
Zt Transfornnationszeiger