WO2015146061A1 - 車両用認知通知装置、車両用認知通知システム - Google Patents
車両用認知通知装置、車両用認知通知システム Download PDFInfo
- Publication number
- WO2015146061A1 WO2015146061A1 PCT/JP2015/001446 JP2015001446W WO2015146061A1 WO 2015146061 A1 WO2015146061 A1 WO 2015146061A1 JP 2015001446 W JP2015001446 W JP 2015001446W WO 2015146061 A1 WO2015146061 A1 WO 2015146061A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- driver
- recognition
- host
- unit
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/163—Decentralised systems, e.g. inter-vehicle communication involving continuous checking
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/133—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams within the vehicle ; Indicators inside the vehicles or at stops
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Abstract
車両用認知通知装置は、自車両に搭載され、他車両から送信された、当該他車両のドライバが自車両を認知していることを示す信号を受信する認知情報受信処理部(F34)と、他車両のドライバが自車両を認知していることを、自車両のドライバに報知する報知制御部(F8)と、を備える。車両用認知通知システム(100)は、第1車両に搭載されている第1車両用認知通知装置(1A)と、第2車両に搭載されている第2車両用認知通知装置(1B)と、備える。第1車両用認知通知装置(1A)は、自ドライバ認知状態判定部(F72)と、認知情報送信処理部(F33)と、を備え、第2車両用認知通知装置(1B)は、認知情報受信処理部(F34)と、報知制御部(F8)と、を備える。
Description
本出願は、2014年3月28日に出願された日本国特許出願2014-70022号に基づくものであり、ここにその記載内容を参照により援用する。
本開示は、車両用認知通知装置、車両用認知通知システムに関する。
従来、複数の車両が相互に無線通信(いわゆる車車間通信)を実施して、その無線通信範囲内に存在する車両の位置情報を共有する技術がある。例えば特許文献1には、自車両と位置情報を共有している他車両の存在を示すシンボルや、当該他車両の現在位置を示す地図画像を、表示装置に表示する車両用認知支援システムが開示されている。この車両用認知支援システムによれば、自車両のドライバが当該他車両の存在を認知することを支援することができる。
また、他車両が、特許文献1に開示の車両用認知支援システムを搭載してあって、かつ、自車両と位置情報を共有している場合、当該他車両の表示装置には、他車両の存在を示すシンボルや、自車両の現在位置を示す地図画像が表示されることになる。したがって、特許文献1に開示の車両用認知支援システムによれば、他車両のドライバに自車両を認知するように支援することができる。
本願発明者らは以下を見出した。特許文献1に開示の車両用認知支援システムによれば、他車両のドライバが自車両を認知するように支援することはできても、他車両のドライバが自車両を認知しているか否かは、自車両のドライバにとっては不明である虞があった。
本開示は、この事情に基づいて成されたものであり、その目的とするところは、他車両のドライバが自車両を認知していることを、自車両のドライバが認識できる車両用認知通知装置及び車両用認知通知システムを提供することにある。
本開示の一態様に係る車両用認知通知装置は、自車両に搭載され、他車両から送信された、当該他車両のドライバが自車両を認知していることを示す信号を受信する認知情報受信処理部と、認知情報受信処理部が信号を受信した場合には、他車両のドライバが自車両を認知していることを自車両のドライバに報知する報知制御部と、を備える。
本開示の認知情報受信処理部によれば、他車両から送信された、当該他車両のドライバが自車両を認知していることを示す信号を受信した場合には、報知制御部は、他車両のドライバが自車両を認知していることを自車両のドライバに報知する。すなわち、以上の構成によれば、自車両のドライバは、他車両のドライバが自車両を認知していることを認識できる。
本開示の別の一態様に係る車両用認知通知システムによれば、第1車両に搭載されている第1車両用認知通知装置と、第2車両に搭載されている第2車両用認知通知装置と、備える車両用認知通知システムであって、第1車両用認知通知装置は、第1車両のドライバが第2車両を認知しているか否かを判定する自ドライバ認知状態判定部と、自ドライバ認知状態判定部が第1車両のドライバが第2車両を認知していると判定した場合には、第1車両のドライバが第2車両を認知していることを示す信号を第2車両に送信する認知情報送信処理部と、を備え、第2車両用認知通知装置は、第1車両から送信された、信号を受信する認知情報受信処理部と、認知情報受信処理部が信号を受信した場合には、第1車両のドライバが第2車両を認知していることを第2車両のドライバに報知する報知制御部と、を備える。
本開示の車両用認知通知システムによれば、他車両から送信された、当該他車両のドライバが自車両を認知していることを示す信号を受信した場合には、報知制御部は、他車両のドライバが自車両を認知していることを自車両のドライバに報知する。すなわち、以上の構成によれば、自車両のドライバは、他車両のドライバが自車両を認知していることを認識できる。
本開示についての上記および他の目的、特徴や利点は、添付の図面を参照した下記の詳細な説明から、より明確になる。添付図面において、
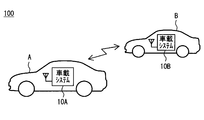
図1は、本実施形態に係る車両用認知通知システムの概略的な構成の一例を示す図であり、
図2は、本実施形態における車載システムの概略的な構成の一例を示すブロック図であり、
図3Aは、本実施形態に係る制御部の概略的な構成の一例を示すブロック図であり、
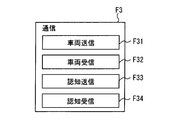
図3Bは、本実施形態に係る通信処理部の概略的な構成の一例を示すブロック図であり、
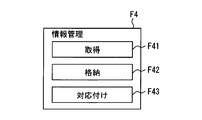
図3Cは、本実施形態に係る車両情報管理部の概略的な構成の一例を示すブロック図であり、
図3Dは、本実施形態に係る認知状態判定部の概略的な構成の一例を示すブロック図であり、
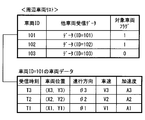
図4は、メモリが記憶する周辺車両リストのデータ構造の一例を説明するための図であり、
図5は、制御部が実施する対象車両設定処理の一例を示すフローチャートであり、
図6は、制御部が実施する他ドライバ認知状態判定処理の一例を示すフローチャートであり、
図7は、制御部が実施する認知情報送信関連処理の一例を示すフローチャートであり、
図8は、自ドライバ認知状態判定部が実施する自ドライバ認知状態判定処理の一例を示すフローチャートであり、
図9は、本実施形態における車載システムの作動及び効果を説明するための図であり、
図10Aは、変形例1における制御部の概略的な構成の一例を示すブロック図であり、
図10Bは、変形例1における位置関係変化検出部の概略的な構成の一例を示すブロック図である。
以下、本開示の実施形態について図を用いて説明する。図1は、本実施形態に係る車両用認知通知システム100の概略的な構成の一例を示す図である。車両用認知通知システム100は、図1に示すように複数の車両A、Bのそれぞれに搭載されている車載システム10A、10Bを備える。各車両に搭載されている車載システム10A、10Bは何れも同様の機能を備えており、以降においてこれらを区別しない場合には車載システム10と記す。
以降では、車載システム10を搭載している任意の1つの車両を自車両と称するが、車載システム10を搭載している複数の車両において、自車両、他車両の関係は、相対的に定まるものであり、仮に図1において車両Aを自車両とすると、車両Bが他車両となる。一例として車両Aが本開示の第1車両に相当し、車両Bが本開示の第2車両にそれぞれ相当する。以下、車載システム10の構成の詳細について説明する。
車載システム10は図2に示すように、制御部1(逐次制御部とも呼ぶ)、通信装置2、周辺監視システム3、車載センサ群4、ドライバモニタ5、表示装置6、音声出力装置7、及び入力装置8を備える。制御部1と、通信装置2、周辺監視システム3、車載センサ群4、ドライバモニタ5、表示装置6、音声出力装置7、及び入力装置8とは、それぞれ周知の車両内通信ネットワークで相互通信を実施する。車両内通信ネットワークは、有線通信によって構築されても良いし、無線通信によって構築されてもよい。また、それらを組み合わせて構築されていても良い。
通信装置2は、送受信アンテナを備え、自車両の周辺に存在する他の車両の通信装置2との間で、通信網を介さないブロードキャスト型の無線通信によって情報の送受信を行う。つまり、通信装置2は、車車間通信を行う。
車車間通信は、例えば700MHz帯の電波などを用いる構成とし、通信装置2の無線通信可能な範囲は、自車両を中心とする数百m以内とする。すなわち、自車両は、その無線通信可能な範囲に存在する他の車両と、逐次車車間通信を実施する。車車間通信で用いる周波数帯は、上述した700MHz帯以外の周波数帯、たとえば、5.8GHz帯、2.4GHz帯などの周波数を用いてもよい。また、無線通信可能な範囲も適宜設計されればよい。なお、車々間通信における通信相手は、その送受信される情報に含まれている車両IDで特定することができる。車両IDは、複数の車両をそれぞれ識別するために車両毎に設定されている識別コードである。
周辺監視システム3は、自車両に搭載され、制御部1の周辺監視制御部F2の指示に基づいて自車両の周辺の障害物(すなわち他車両)の検出を行い、検出した車両の相対位置や相対速度などを示すデータを制御部1に出力する。なお、周辺監視システム3の検出結果は、自車両周辺に存在する他車両に関する情報(たとえば位置情報や車速)をより精度よく取得するために、車車間通信で受信した車両情報(詳細は後述)と相補的に用いられる。
本実施形態では、周辺監視システム3は、前方監視ユニット31、後方監視ユニット32、右側方監視ユニット33、及び左側方監視ユニット34を備えるものとする。
各ユニットの概要としては、前方監視ユニット31は、自車両の前方の障害物の検出を逐次行い、後方監視ユニット32は、自車両の後方の障害物の検出を逐次行う。また、右側方監視ユニット33は、自車両の右側方の障害物の検出を逐次行い、左側方監視ユニット34は、自車両の左側方の障害物の検出を逐次行う。次に、各ユニットの構成及び作動の詳細について述べる。
前方監視ユニット31は、例えば自車両の前方を撮像する前方カメラと、自車両の前方の障害物(ここでは他車両)を電磁波や音波の反射によって得られる反射波を利用して検出する前方障害物センサと、を備える構成とする(何れも図示略)。なお、ここでの前方とは、自車両の正面方向に限らず、左斜め前方や右斜め前方を含む範囲を指すこととする。
例えば前方カメラは、光学式カメラであって、例えばCMOSカメラやCCDカメラ等を用いることができる。その他、前方カメラとして赤外線カメラを用いても良い。前方カメラは、例えば自車両の前方の所定範囲を撮影するように車室内のルームミラー付近に設置されればよい。
また、前方障害物センサは、探査波の送信時刻と、とその探査波が物体に反射された生じる反射波を受信した時刻との差や位相の変化をもとに、障害物との距離やその障害物が存在する方向、相対速度を検出する周知の障害物センサである。ここでは一例として、ミリ波レーダを採用する。前方障害物センサは、例えば自車両の前方の所定範囲に探査波を送信するようにフロントバンパ中央付近に設置されればよい。
もちろん、前方障害物センサは、その他、レーザレーダや赤外線センサ、超音波センサを用いてもよく、さらには、複数のカメラで撮影した画像の視差から位置を特定する測距システムなどを用いてもよい。
前方監視ユニット31は、前方カメラが撮影した画像や、前方障害物センサが検出した検出データから他車両を検出すると、当該他車両に対して、他車両毎に固有の検出車両IDを付与し、当該他車両の自車両に対する相対位置や、相対速度などを算出する。
例えば前方監視ユニット31は、前方カメラの画像情報を用いた画像認識等によって自車両前方に存在する他車両を検出すると、前方障害物センサで当該他車両までの距離や、当該他車両が存在する方向を検出する。そして、距離及び方向を特定することで当該他車両の自車両に対する相対位置を算出する。検出物体が車両であるか否かは周知のパターンマッチング技術などを適用すれば良い。
また、前方監視ユニット31は、一度検出して検出車両IDを付与した他車両に対しては、周知の物体追跡(トラッキング)手法を用いて追尾することで、この追尾が成立している限り、同一の他車両に対しては同一の検出車両IDが付与されている状態を維持する。
そして、前方監視ユニット31は、他車両に割り当てられている検出車両IDと、当該他車両の相対位置や相対速度と対応付けたデータ(前方車両データ)を生成し、逐次制御部1に出力する。
なお、他の態様として、前方監視ユニット31が前方カメラを備えずに、前方障害物センサのみによって他車両までの距離を検出する構成としてもよい。また、前方障害物センサを備えずに、前方カメラの画像のみによって他車両を検出する構成としてもよい。
後方監視ユニット32は、自車両の後方を撮像する後方カメラと、電磁波などの探査波の反射によって得られる反射波を利用して自車両の後方に存在する障害物(すなわち他車両)を検出する後方障害物センサと、を備える(何れも図示略)。ここでの後方とは、自車両の背面方向に限らず、左斜め後方や右斜め後方を含む範囲を指すこととする。
後方カメラ及び後方障害物センサは、設置箇所や撮影範囲(または検出範囲)が異なる点を除けば、前方カメラ及び前方障害物センサのそれぞれと同様の構成である。すなわち、後方カメラは光学式カメラであって、自車両の後方の所定範囲を撮影するように、例えばリアウインドウ上部に設置されればよい。また、後方障害物センサはミリ波レーダであって、自車両の後方の所定範囲に検知範囲を形成するように設置されている。例えば後方障害物センサは、例えば自車両の後方の所定範囲に探査波を送信するようにリアバンパ中央付近に、それぞれ設置されればよい。
後方監視ユニット32も、後方カメラが撮影した画像や、後方障害物センサが検出した検出データから自車両後方に存在する他車両を検出すると、当該他車両と自車両との相対位置、相対速度などを他車両毎に算出する。また、これらの他車両毎の情報を、前方監視ユニット31と同様に、他車両毎に割り当てる検出車両IDによって管理する。
そして、後方監視ユニット32は、他車両に割り当てられている検出車両IDと、当該他車両の相対位置や相対速度と対応付けたデータ(後方車両データ)を生成し、逐次制御部1に出力する。
右側方監視ユニット33は、探査波を送信してからその探査波の反射波を受信するまでの時間を利用して自車両の右側方に存在する他車両との距離や、当該他車両が存在する方向を検出する右側方障害物センサを備える。この右側方障害物センサとしては種々の障害物センサを採用することができ、本実施形態では一例として、前方障害物センサや後方障害物センサなどと同様に、ミリ波レーダを採用する構成とする。なお、ここでの右側方とは、自車両の右斜め前方から右斜め後方まで含むものとする。
右側方障害物センサで検出した他車両の情報は、制御部1に供給される。より具体的には、右側方監視ユニット33は他車両を検出すると、当該他車両と自車両との相対位置、相対速度などを他車両毎に算出する。これらの他車両毎の情報は、前方監視ユニット31と同様に、他車両毎に割り当てる検出車両IDによって管理される。そして、右側方監視ユニット33は、他車両に割り当てられている検出車両IDと、当該他車両の相対位置や相対速度と対応付けたデータ(右側方車両データ)を生成し、逐次制御部1に出力する。
左側方監視ユニット34は、探査波を送信してからその探査波の反射波を受信するまでの時間を利用して自車両の左側方に存在する他車両との距離や当該他車両が存在する方向を検出する左側方障害物センサを備える。この左側方障害物センサとしては種々の障害物センサを採用することができ、本実施形態では一例として、他の障害物センサなどと同様に、ミリ波レーダを採用する。なお、ここでの左側方とは、自車両の左斜め前方から左斜め後方まで含むものとする。
左側方障害物センサで検出した障害物の情報は、制御部1に供給される。より具体的には、左側方監視ユニット34は他車両を検出すると、当該他車両と自車両との相対位置、相対速度などを他車両毎に算出する。これらの他車両毎の情報は、前方監視ユニット31と同様に、他車両毎に割り当てる検出車両IDによって管理される。そして、左側方監視ユニット34は、他車両に割り当てられている検出車両IDと、当該他車両の相対位置や相対速度と対応付けたデータ(左側方車両データ)を生成し、逐次制御部1に出力する。
本実施形態において右側方監視ユニット33及び左側方監視ユニット34は、前方監視ユニット31及び後方監視ユニット32と異なって、カメラを備えない構成とするが、これに限らない。すなわち、右側方監視ユニット33及び左側方監視ユニット34は、前方監視ユニット31及び後方監視ユニット32と同様に、それぞれカメラを備える構成としても良い。
また、障害物センサとして全方位型のレーザレーダ等を利用できる場合には、当該全方位型の障害物センサによって、前方、後方、左側方及び右側方の障害物を検出する構成としてもよい。
車載センサ群4は、自車両に搭載された、自車両の状態を検出する種々のセンサであって、例えば、車速センサや、加速度センサ、ジャイロセンサ、GNSS受信機、操舵角センサ、ブレーキストロークセンサ、アクセルペダルセンサ、方向指示レバー位置センサ、ドアミラー角度センサなどが含まれる。
車速センサは自車両の走行速度を検出し、加速度センサは自車両に作用する加速度を検出する。GNSS受信機は、GNSS(Global Navigation Satellite System)で用いられる衛星からの電波を受信することで、GNSS受信機の現在位置を示すデータを取得する。GNSS受信機としては、例えばGPS受信機を用いることができる。
ジャイロセンサは自車両の鉛直軸周りの回転角速度を検出し、操舵角センサはステアリングの切れ角に基づいて操舵角を検出する。ブレーキストロークセンサはブレーキペダルの踏込量を検出し、アクセルペダルセンサはアクセルペダルの踏込量を検出する。方向指示レバー位置センサは、方向指示レバーが左折位置又は右折位置になっているかを検出する。
ドアミラー角度センサは、自車両に備えられた左右のドアミラーの鏡面の角度を検出するためのセンサである。車載センサ群4が備える種々のセンサが検出した検出値は、逐次制御部1に出力される。
ドライバモニタ5は、撮影面をドライバに向けた姿勢にて、車両の室内に設置されており、ドライバの顔を含む範囲を逐次(例えば100ミリ秒毎に)撮影し、その撮影画像の画像データを、制御部1に逐次出力する。本実施形態ではドライバモニタ5を、ステアリングコラムカバーの上に取り付けるものとするが、その他の態様として、バックミラー部分になどに取付けてもよい。
また、本実施形態ではドライバモニタ5として、赤外線を検出することにより、可視光の少ない環境下においても撮像可能な赤外線カメラを用いる。もちろん、ドライバモニタ5は、赤外線カメラのほかに、例えばCMOSカメラやCCDカメラ等、可視光を感知する光学式のカメラ等であってもよい。このドライバモニタ5が本開示の顔部撮影装置に相当する。
表示装置6は、制御部1からの指示に基づいてテキストや画像を表示し、種々の情報をドライバに報知する。表示装置6は、例えばフルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。本実施形態において表示装置6は、インストゥルメントパネルの車幅方向中央付近に配置されるセンターディスプレイとする。
他の態様として、表示装置6はインストゥルメントパネルの運転席側の上部に配置されたメーターディスプレイであってもよい。また、表示装置6は、フロントガラスの運転席前方の一部分に虚像を映し出して種々の情報を表示する周知のヘッドアップディスプレイであってもよい。さらに、表示装置6は、センターディスプレイや、メーターディスプレイ、ヘッドアップディスプレイなどを組み合わせて実現されていても良い。表示装置6が複数のディスプレイを備える場合には、制御部1がその表示させるデータ毎に、そのデータの出力先とするディスプレイを選択すればよい。
音声出力装置7は、スピーカ等から構成され、制御部1から入力される音声データを音声(単なる音も含む)に変換して出力する。
入力装置8は、ステアリングホイールに設けられたメカニカルなスイッチ(いわゆるステアリングスイッチ)である。例えば入力装置8としてのステアリングスイッチは、複数のスイッチを備え、それら複数のスイッチのそれぞれには、ドライバの好みに応じた機能が割り付けられている。ドライバは、この入力装置8を操作することによって、その操作に応じた機能の実行を指示することができる。入力装置8は、ドライバによる入力操作を検出すると、その入力操作を表す制御信号を制御部1に出力する。
なお、本実施形態では、入力装置8として、ステアリングスイッチを採用する構成とするが、これに限らない。その他、周知の音声認識技術を用いて実現される音声入力装置であってもよいし、インストゥルメントパネルに設けられたメカニカルなスイッチであってもよい。さらに、表示装置6と一体となって構成される周知のタッチパネルなどであっても良い。
制御部1は、通常のコンピュータとして構成されており、周知のCPU、ROMやEEPROM、フラッシュメモリなどの不揮発性メモリ、RAMなどの揮発性メモリ、I/O、及びこれらの構成を接続するバスライン(何れも図示略)などを備えている。
制御部1が備えるメモリ11は、書き換え可能な記憶媒体であって、例えば制御部1が備えるフラッシュメモリやRAMなどによって実現される。
このメモリ11が、種々の処理を実行するためのプログラムモジュールやデータを記憶している。また、メモリ11は、自車両に設定されている車両IDや、周辺車両リストを記憶している。
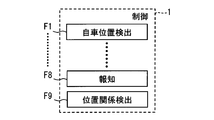
ここで図2を用い、制御部1が、メモリ11に格納されている種々のプログラムモジュールを実行することによって実現する機能について説明する。制御部1は、図2に示すように機能ブロックとして、自車位置検出部F1、周辺監視制御部F2、通信処理部F3、車両情報管理部F4、対象車両設定部F5、視線検出部F6、認知判定部F7、及び報知制御部F8を備える。この制御部1が本開示の車両用認知通知装置に相当する。また、車載システム10Aが備える制御部1Aが本開示の第1車両用認知通知装置に、車載システム10Bが備える制御部1Bが本開示の第2車両用認知通知装置に、それぞれ相当する。
自車位置検出部F1は、GNSS受信機や、車速センサ、ジャイロスコープなどの車載センサ群4が備えるセンサから入力される信号に基づいて、自車両の現在位置を検出する。現在位置を示す位置情報は、例えば緯度、経度で表される構成とすればよい。自車位置検出部F1は、逐次(例えば100ミリ秒毎)に位置情報を取得する。
なお、現在位置を検出するために用いられるセンサ群は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。もちろん、各センサの精度によっては、上述したセンサの一部の出力値を用いても良い。この自車位置検出部F1が本開示の自車位置取得部に相当する。
周辺監視制御部F2は、前述の周辺監視システム3の動作を制御するとともに、周辺監視システム3から自車両周辺に存在する他車両の情報を取得する。すなわち、前方監視ユニット31からは前方車両データを、後方監視ユニット32からは後方車両データを、右側方監視ユニット33からは右側方車両データを、左側方監視ユニット34から左側方車両データを取得する。そして、周辺監視制御部F2は、これら各方向に存在する他車両のデータに基づいて、周辺監視システム3で検出可能な範囲に存在する他車両毎に、その相対位置や相対速度を示すデータ(周辺車両データとする)を生成する。
なお、本実施形態において、前方や後方といった各方向に存在する他車両の相対位置等を特定する処理は、各方向に対応する監視ユニットが実施し、周辺監視制御部F2は、各監視ユニットが特定した結果を取りまとめるものとするが、これに限らない。各方向に存在する他車両の相対位置などを特定する処理の一部または全部は、周辺監視制御部F2が実施しても良い。すなわち、周辺監視制御部F2は、各監視ユニットが備える機器(カメラや障害物センサ)が検出したデータを逐次取得し、それらのデータから周辺車両の相対位置や相対速度等を特定してもよい。
通信処理部F3は、通信装置2の動作を制御し、自車両周辺に存在する他車両からデータを受信する処理を実施するとともに、それら他車両の全て又は一部に対してデータを送信する処理を実施する。通信処理部F3は、より細かい機能ブロックとして図3Aから図3Dに示すように、車両情報送信処理部F31、車両情報受信処理部F32、認知情報送信処理部F33、及び認知情報受信処理部F34を備える。
車両情報送信処理部F31は、少なくとも自車両の車両ID及び位置情報を含む車両情報を生成し、通信装置2を介して自車両周辺に存在する全ての他車両に向けて送信する。車両情報は、標準のフォーマットに従って生成されればよく、その送信元となる車両の車両ID及び位置情報の他、その車両の進行方向や車速も含んでいてもよい。本実施形態では、車両情報は、送信元の車両ID、位置情報、進行方向、車速、加速度を含む構成とする。
なお、車両情報は、その送信元の位置情報として、最新の位置情報だけでなく、その車両の位置情報を時系列に並べた位置情報の時系列データを含んでいてもよい。位置情報の時系列データは、その車両の走行軌跡を示す。また、車両情報は、位置情報の代わりに、位置を特定するための情報を含む構成としてもよい。位置を特定するための情報とは、例えばその送信元の車両周辺を走行する他車両の車両ID、及びその車両との相対位置を示す情報である。
車両情報受信処理部F32は、他車両が送信した車両情報を受信する処理を行う。他車両から受信した車両情報は、車両情報管理部F4に逐次出力する。他車両が送信する車両情報も自車両が送信する車両情報と同様のデータフォーマットに従って生成される。すなわち、車両情報受信処理部F32は、他車両から、当該他車両の車両ID、位置情報、進行方向、車速、加速度を含む車両情報を受信する。
認知情報送信処理部F33は、認知情報信号を生成して所定の他車両に対して送信する。認知情報信号は、自車両のドライバが当該他車両の存在を認知しているか否かを表す信号である。
例えば認知情報信号は、送信元の車両IDと、宛先とする他車両の車両IDと、自車両のドライバがその宛先とする他車両の存在を認知しているか否かを表す認知情報を含んでいる構成とする。認知情報は、例えば処理上のフラグである認知フラグによって表せばよい。より具体的には、自車両のドライバが当該他車両の存在を認知している場合には認知フラグに1を設定し、一方、自車両のドライバが当該他車両の存在を認知していない場合には、認知フラグに0を設定した認知情報信号を送信すればよい。
認知情報受信処理部F34は、他車両が自車両に向けて送信した認知情報信号を受信する処理を実施する。すなわち、他車両から受信した認知情報信号は、その認知情報信号の送信元のドライバが、自車両を認知しているか否かなどを表している。以降では、自車両のドライバを自ドライバ、他車両のドライバを他ドライバとも称する。
なお、本実施形態では各車両は通信装置2による同報通信を行うため、自車両の通信装置2は、自車両以外に向けて送信された認知情報信号も受信することになる。そこで、認知情報受信処理部F34は、通信装置2から認知情報信号が入力されると、当該認知情報信号に含まれている宛先の車両IDと自車両の車両IDとを照合する。そして、その称号の結果、宛先の車両IDが自車両のIDとなっていない当該認知情報信号については破棄し、一方、宛先の車両IDが自車両の車両IDとなっている場合には、その認知情報信号を認知判定部F7に渡す。このような構成とすることで、本実施形態においても特定の車両との通信を実施する構成とする。
車両情報管理部F4は、自車両周辺に存在する他車両の情報を管理する。車両情報管理部F4は、上述した役割を実施するためのより細かい機能ブロックとして、他車両情報取得部F41、車両情報格納処理部F42、及び周辺車両対応付け部F43を備える。
他車両情報取得部F41は、車両情報受信処理部F32が他車両から受信した車両情報を取得するとともに、周辺監視制御部F2から周辺車両データを取得する。すなわち、他車両情報取得部F41は、自車両周辺に存在する他車両の情報(位置情報や車速など)などを取得する。この他車両情報取得部F41が本開示の他車位置取得部に相当する。
車両情報格納処理部F42は、他車両情報取得部F41が車両情報受信処理部F32から取得した他車両の車両情報を、送信元の他車両の車両IDと対応付けてメモリ11に格納する。一例として本実施形態の車両情報格納処理部F42は、図4に示すように、車両情報を受信している他車両をリスト化した周辺車両リストによって、自車両周辺に存在する他車両の車両情報を管理する。周辺車両リストは、車両ID毎に、当該他車両から受信した車両情報をリスト化した他車両受信データと、対象車両設定フラグと、を備えている。
他車両受信データは、当該他車両から受信した車両情報を、受信時刻が新しい順に並べたデータであって、各時刻で受信した車両情報に含まれていた車両位置、進行方向、車速、送信間隔を備えている。なお、他車両受信データが備えるデータは古いものから順次破棄していけばよい。また、一定時間車両情報を受信していない車両IDのデータについては、周辺車両リストから削除する。対象車両設定フラグについては後述する。
また、車両情報格納処理部F42は、車両情報送信処理部F31が生成した、自車両の車両情報についても他車両受信データと同様に、生成時刻が新しい順に並べてメモリ11に保存する。このメモリ11に格納している、時系列に並べた自車両の車両情報からなるデータを自車両データと称する。
さらに、車両情報格納処理部F42は、他車両情報取得部F41が周辺監視制御部F2から取得した周辺車両データに含まれる他車両毎のデータを、そのデータに対応付けられている検出車両ID毎に区別してメモリ11に格納する。なお、検出車両ID毎のデータを以降では、他車両検出データと称する。他車両検出データは、当該他車両の自車両に対する相対位置や相対速度など、周辺監視システム3が検出した結果を検出時刻が新しい順に並べたデータとする。なお、便宜上、周辺監視システム3が検出した自車両に対する他車両の相対位置を検出相対位置、また、その相対速度を検出相対速度と称する。
周辺車両対応付け部F43は、検出車両ID毎の他車両検出データと、周辺車両リストが備える車両ID毎の他車両受信データと、に基づいて、周辺監視システム3が検出している他車両(言い換えれば検出車両ID)と、車両IDとの対応付けを行う。
例えば、周辺車両対応付け部F43は、ある車両IDの他車両受信データに含まれる位置情報と、自車両の位置情報とから、自車両に対する当該他車両の相対位置(受信相対位置とする)を算出する。そして、周辺車両対応付け部F43は、前述の受信相対位置と、他車両毎の検出相対位置と、を比較して、周辺監視システム3が検出している他車両のうち、その車両情報を送信している他車両に該当する他車両を抽出する。
より具体的には、周辺監視システム3が検出している他車両のうち、当該他車両の検出相対位置と、前述の受信相対位置との差が所定の許容距離内(例えば1m以内)となる検出車両IDとなっている他車両を、当該受信相対位置の算出に用いた車両情報の送信元の他車両であると判定する。そして、その該当すると判定した他車両の検出車両IDと、当該受信相対位置の算出に用いた車両情報を送信している他車両の車両IDとを対応付ける。
なお、本実施形態では、現在時刻での受信相対位置と検出相対位置とに基づいて、車両情報を受信している他車両と、周辺監視システム3が検出している他車両との対応付けを行う構成とするがこれに限らない。複数の時点における受信相対位置の時系列データと、同じ複数の時点における検出相対位置の時系列データと、に基づいて、車両情報を受信している他車両と、周辺監視システム3が検出している他車両との対応付けを行ってもよい。これら複数時点における受信相対位置の時系列データは、メモリ11に格納されている他車両受信データに基づいて生成されればよい。
また、相対位置に加えて、相対速度や、進行方向、加速度などを用いて、車両情報を受信している他車両と、周辺監視システム3が検出している他車両との対応付けを行ってもよい。
相対速度を用いる場合には、他車両から受信した車両情報に含まれる車速と車載センサ群4から取得する自車両の車速とから算出した相対速度(受信相対位置とする)と、検出車両ID毎に保存されている検出相対速度と、を比較し、その相対速度の差を算出する。そして、受信相対速度と検出相対速度の差が所定の閾値以下であって、受信相対位置と検出相対位置の差も一定距離以内となっている他車両を、当該受信相対速度や受信相対位置の算出に用いた車両情報を送信した他車両であると判定する。
もちろん、車両情報を受信している他車両と、周辺監視システム3が検出している他車両との対応付けの方法は、上述した例に限らず、その他、公知の方法を適用してもよい。
本実施形態では以降で述べる種々の処理において、車両IDと検出車両IDとの対応付けが完了している他車両の、相対位置や、相対速度、位置情報、車速などとして、周辺監視システム3が検出した値を用いる構成とする。すなわち、他車両の相対位置や相対速度として、検出相対位置や検出相対速度を採用し、他車両の位置情報は、自車位置検出部F1が検出する自車両の位置情報と検出相対位置から特定する。また、他車両の車速も、自車両の車速と検出相対速度とから求めた値を採用する構成とする。加速度など、他のパラメータも同様とする。
もちろん、他の態様として、他車両から受信する車両情報を信頼して用いることが出来る場合には、他車両の走行状態を示す情報として、その車両情報から受信した車両情報に含まれる値を用いてもよい。すなわち、他車両の位置情報や車速として、当該他車両から車両情報に含まれる値を採用してもよい。
なお、他車両の進行方向は、当該他車両から受信した車両情報に含まれている値を採用してもよいし、当該他車両の位置情報の時系列データから算出した値を採用してもよい。
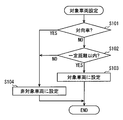
対象車両設定部F5は、車両情報を受信している他車両のうち、他ドライバ認知状態判定処理及び認知情報送信関連処理において処理の対象とする他車両(対象車両とする)を設定する処理(対象車両設定処理とする)を実施する。この対象車両設定処理については、図5に示すフローチャートを用いて説明する。
図5は、対象車両設定部F5が実施する対象車両設定処理の一例を示すフローチャートである。図5に示す対象車両設定処理は、例えば、車両情報受信処理部F32が他車両から車両情報を受信した場合に実施する構成とする。その他、周辺車両リストに登録されている複数の他車両のそれぞれに対して、逐次(例えば100ミリ秒毎)に実施してもよい。
まず、S101では、受信した車両情報に基づいて、当該車両情報を送信した他車両が対向車線を走行する他車両であるか否かを判定する。
他車両が対向車線を走行する他車両であるか否かは、受信した車両情報に含まれる当該他車両の進行方向と、自車両の進行方向とを比較することで判定すればよい。例えば、当該他車両の進行方向と自車両の進行方向とのなす角度が、所定の閾値(対向車判定閾値とする)以上となっている場合に、他車両が対向車線を走行する他車両であると判定する。対向車判定閾値は、例えば170度など、適宜設計すればよい。
当該車両情報を送信した他車両が、対向車線を走行する他車両であると判定した場合には、S101がYESとなって、S104に移る。一方、車両情報を送信した他車両が、対向車線を走行する他車両であると判定した場合には、S101がNOとなってS102に移る。
S102では、車両情報に含まれる位置情報と自車両の位置情報に基づいて、当該車両情報を送信した他車両が、自車両から所定の距離(対象車両設定用距離とする)以内に存在するか否かを判定する。対象車両設定用距離は、例えば50mなどの一定値としてもよいし、自車両の車速に応じて定まる値であってもよい。後者の場合には、対象車両との相対速度が大きいほど、対象車両設定用距離も大きくなるように設定する。
当該車両情報を送信した他車両が、自車両から対象車両設定用距離以内に存在する場合にはS102がYESとなってS103に移る。一方、当該車両情報を送信した他車両が、自車両から対象車両設定用距離以内に存在しない場合には、S102がNOとなってS104に移る。
S103では、当該他車両を対象車両に設定して本フローを終了する。より具体的には、周辺車両リストにおいて、当該車両情報を送信した他車両の対象車両フラグに1を設定する。対象車両フラグは、対象車両とする他車両と、対象車両ではない他車両(非対象車両とする)とを区別するためのフラグであって、対象車両とする他車両に対しては対象車両フラグを1に設定する。一方、対象車両フラグが0に設定されている車両とは、非対象車両であることを意味する。
S104では、当該他車両を非対象車両に設定して本フローを終了する。すなわち、周辺車両リストにおいて、当該車両情報を送信した他車両の対象車両フラグに0を設定する。
以上で述べたようにして、自車両周辺に存在する他車両に対して、対象車両とするか否かを予め設定しておくことで、後述の他ドライバ認知状態判定処理及び認知情報送信関連処理における処理負荷を軽減することができる。すなわち、上述の対象車両設定処理は、他ドライバ認知状態判定処理及び認知情報送信関連処理における処理負荷を軽減するための処理であって、必須の処理ではない。
また、本実施形態では、自車両と他車両の進行方向の差や、自車両と他車両との距離を用いて対象車両と非対象車両とを区別する例を示したが、これに限らない。例えば、自車両の走行している道路の種別や、走行経路、交差点情報などを用いて対象車両と非対象車両とを区別してもよい。
さらに、本実施形態では、対向車線を走行する車両と、自車両から対象車両設定用距離以上離れている他車両を、対象車両に設定せず、それ以外の他車両を対象車両とする構成とするがこれに限らない。進行方向によらず、自車両から対象車両設定用距離以内に存在する他車両を全て対象車両としてもよい。すなわち、図5に示すフローチャートは一例である。対象車両とする条件は適宜設計されれば良い。
また、対向車に限らず、物理的に遭遇する可能性がないと判定できる車両を、非対象車両とする構成としてもよい。物理的に遭遇する可能性がない車両とは、例えば、都市高速と一般道路が並走する区間において、都市高速道路を走行する車両と、一般道路を走行する車両の関係にある車両である。すなわち、自車両が高速道路に並走する一般道路を走行している場合、高速道路を走行する他車両の中には、自車両と同じ進行方向となっているものも存在しうる。しかしながら、一般道路を走行している自車両と、高速道路を走行している当該他車両とは、物理的に遭遇する可能性が無いと言える。したがって、このような車両は非対称車両と設定することが好ましい。
都市高速道路を走行する車両と、一般道路を走行する車両の関係にあるか否かは、種々の方法で判定すれば良い。例えば、車々間通信で送受信される車両情報に、各車両が走行している道路の種別(高速道路や一般道路)の情報が含まれている場合には、その情報を用いて、上述したような関係を満たす車両であるか否かを判定すればよい。また、位置情報が緯度・経度に加えて高さ方向の情報を含んでいる場合には、自車両と他車両が存在する高さの差から、物理的に遭遇する可能性があるか否かを判定してもよい。高さの差が所定の閾値以上ある場合には、都市高速道路を走行する車両と、一般道路を走行する車両の関係にあったり、立体駐車場において違う階層に存在する車両であったりすることを意味し、何れの場合にも、物理的に遭遇する可能性がないと言える。
逆に、交差点付近においては、その進行方向が、自車両の進行方向と一定の角度差を為す他車両であっても、物理的に遭遇する可能性がある車両と判定してもよい。これは、交差点においては、様々な進行方向となっている車両が合流するからである。
視線検出部F6は、ドライバモニタ5が撮影した画像データを逐次取得し、その画像データから、公知の画像処理技術を用いて特徴点を検出し、顔領域、及び顔領域における目領域、黒目部分などを検出する。本実施形態のドライバモニタ5は自車両に固定して設置されているとともに、撮像方向も固定されているため、画像データにおける顔領域の位置や大きさに応じて、自車両内におけるドライバの顔の位置を特定することができる。そして、視線検出部F6は顔領域の大きさと顔領域における目領域の位置および黒目の位置から、ドライバの視線方向を検出する。
認知判定部F7は、より細かい機能ブロックとして、他ドライバ認知状態判定部F71と、自ドライバ認知状態判定部F72と、を備えている。他ドライバ認知状態判定部F71は、自車両に対する他ドライバの認知状態を判定する。本実施形態において、他ドライバ認知状態判定部F71は、自車両に対する他ドライバの認知状態を、認知済み、未認知、不明の3つに区別することとする。
自車両に対する他ドライバの認知状態が認知済みとなっている場合とは、他ドライバが自車両を認識している場合を指し、自車両に対する他ドライバの認知状態が未認知となっている場合とは、他ドライバが自車両を未だ認識していない場合を指す。また、自車両に対する他ドライバの認知状態が不明となっている場合とは、他車両からの認知情報信号を受信しておらず、自車両に対する他ドライバの認知状態を示す情報(すなわち、認知情報)を得られていない場合を指す。このように自車両に対する他ドライバの認知状態が不明となる場合とは、他車両に車載システム10が搭載されていない場合などを意味する。他ドライバ認知状態判定部F71の詳細については、他ドライバ認知状態判定処理で言及する。
自ドライバ認知状態判定部F72は、他車両に対する自ドライバの認知状態を判定し、認知情報送信処理部F33に、その認知状態に基づいた認知情報を生成及び送信させる。なお、他車両に対する自ドライバの認知状態とは、自ドライバが当該他車両の存在を認知しているか否か、すなわち、認知済みか未認知の何れか一方で表されることとする。
報知制御部F8は、表示装置6や音声出力装置7を介して、ドライバに対して種々の情報を報知する処理を実施する。例えば報知制御部F8は、他車両から受信した認知情報信号に基づいて、当該他車両のドライバが自車両を認知しているか否かなどを表す情報を表示装置6に表示する。
また、報知制御部F8は、自車両のドライバが、ドライバに報知すべき他車両が存在する方向をドライバに視認するように促す画像やテキストや、接近中の他車両が存在することをドライバに報知する画像やテキストを表示装置6に表示する。ここで、ドライバに報知すべき他車両とは、自車両の視認可能範囲にあって、まだドライバが認知していない他車両などが該当する。
なお、報知制御部F8は、表示装置6だけでなく、音声出力装置7を介してドライバに対する報知を実施する。さらに、報知制御部F8は、ドアミラーに設けた照明装置(図示略)を点灯させたりするなどして、自車両のドライバに、注意すべき方向を視認するように促してもよい。この報知制御部F8の作動については、図6及び図7に示すフローチャートの説明の中で言及する。
次に、図6に示すフローチャートを用いて、制御部1が実施する他ドライバ認知状態判定処理について説明する。この他ドライバ認知状態判定処理は、制御部1が備える機能ブロックのうち、主として他ドライバ認知状態判定部F71が実施する。他ドライバ認知状態判定処理が備える各処理ステップのうち、他ドライバ認知状態判定部F71が実施する処理ステップに関しては、その処理ステップを実施する主体の記載を省略する。
この図6に示すフローチャートは、例えば、逐次(100ミリ秒毎に)実施される。なお、以下の処理は、周辺車両リストにおいて対象車両となっている他車両毎に順次実施する。したがって、以降での説明に登場する対象車両とは、周辺車両リストにおいて対象車両と設定されている他車両のうちの任意の1台を指す。
まず、S201では、自車両の位置情報と、対象車両の位置情報に基づいて、自車両が、対象車両の視認可能範囲内に存在するか否かを判定する。対象車両の視認可能範囲は、予め設計された視認可能範囲定義データと、位置情報と、進行方向と、に基づいて定まる範囲である。例えば、視認可能範囲は、位置情報が示す地点を基準として、車両前後方向において所定距離(例えば50m)以内、車幅方向において所定距離(例えば20m)以内となる範囲とすればよい。車両の前後方向や車幅方向などは、進行方向から決定すればよい。
視認可能定義データは、その視認可能定義データによって定まる視認可能範囲が、ドライバが視認できると想定される範囲となるように予め設計されればよい。例えば視認可能範囲が、ドライバが車両の正面方向を向いている姿勢において視界に入る範囲だけでなく、体や顔の向きを変えることで、直接視認できる範囲を含むように視認可能範囲データは設計されてもよい。さらに、視認可能範囲が、ドアミラーやバックミラーを介してドライバが間接的に視認できる範囲を含むように視認可能範囲定義データを設定してもよい。また、視認可能範囲定義データは、周辺監視システム3が検出できる範囲に基づいて設定されてもよい。
また、視認可能範囲は、視認可能範囲定義データに加えて、例えば雨天や降雪、霧などの天候条件や夜間か否かなどの、ドライバの視界距離に影響するパラメータ(視界パラメータとする)に基づいて設定されてもよい。例えば、雨天時や降雪時、霧が出ている場合には、ドライバの視界距離は、晴天時などに比べて低下する。したがって、雨天時や降雪時、霧が出ている場合には、視認可能範囲も通常時よりも小さくなるように設定してもよい。夜間時も、昼間よりもドライバの視界が悪くなる。したがって、夜間時は、昼間時よりも視認可能範囲が狭まるように設定する。
夜間か否かは、時間情報に基づいて判定してもよいし、日照センサの出力値から判定してもよい。また、天候条件は、車両外部に設けられたセンタから取得してもよいし、レインセンサから取得してもよい。
なお、視認可能範囲データは、対象車両の視認可能範囲を決定する場合だけではなく、自車両の視認可能範囲を決定する際にも用いる。すなわち、自車両の位置情報、進行方向、及び視認可能範囲定義データに基づいて、自車両の視認可能範囲も一意に定めることができる視認可能範囲定義データは、メモリ11に保存されているものとする。
そして、自車両が、対象車両の視認可能範囲に存在する場合には、S201がYESとなってS202に移る。一方、自車両が対象車両の視認可能範囲に存在しない場合にはS201がNOとなって本フローを終了する。
なお、本実施形態では、対象車両と自車両との間に他の車両が存在し、当該他の車両によって、自車両の周辺監視システム3で対象車両を検出できていない場合には、自車両は対象車両の視認可能範囲に存在しないと判定する。自車両の周辺監視システム3で対象車両を検出できていない場合には、車両情報の送信元としての対象車両と、周辺車両データに含まれる他車両との対応付けができていない状態であることを意味する。
もちろん、他の態様として、対象車両と自車両との間に他の車両が存在し、自車両の周辺監視システム3で対象車両を検出できていない場合であっても、自車両は対象車両の視認可能範囲に存在すると判定する構成としてもよい。
S202では、認知情報受信処理部F34が対象車両から認知情報信号を受信したか否かを判定する。対象車両から認知情報信号を受信した場合には、S202がYESとなってS204に移る。一方、対象車両から認知情報信号を受信しなかった場合には、S202がNOとなってS203に移る。なお、ここでは一例としてS201でYESとなってから、一定時間以内に当該対象車両からの認知情報信号を受信しなかった場合に、S202をNOと判定することとする。
S203では、自車両に対する他ドライバの認知状態を不明と判定して本フローを終了する。
S204では、受信した認知情報信号に基づいて、対象車両のドライバが自車両を認知しているか否かを判定する。そして、対象車両のドライバが自車両を認知している場合、ここでは、受信した認知情報信号に含まれている認知フラグが1となっている場合には、S204がYESとなってS208に移る。一方、対象車両のドライバが自車両を認知していない場合、すなわち、受信した認知情報信号に含まれている認知フラグが0となっている場合には、S204がNOとなってS205に移る。
S205では、自車両に対する他ドライバの認知状態を、未認知と判定してS206に移る。この場合、上述したように、他ドライバが自車両を未だ認識していないことを意味する。
S206では報知制御部F8が、対象車両のドライバが自車両の存在を認知していないことを示す情報を自ドライバに報知してS207に移る。より具体的には、報知制御部F8は、対象車両のドライバが自車両の存在を認知していないことを示す画像やテキストを表示装置6に表示する。また、対象車両のドライバが自車両の存在を認知していないことを示す音声を音声出力装置7から出力してもよい。
S207では、本フローを継続するか否かを判定する。本フローを継続すると判定する場合とは、例えば自車両がまだ対象車両の視認可能範囲に存在している場合である。また、本フローを継続しないと判定する場合とは、自車両が対象車両の視認可能範囲から退出した場合とする。
S207で本フローを継続すると判定した場合には、S207がYESとなってS204に移る。一方、S207で本フローを継続しないと判定した場合には、S207がNOとなって本フローを終了する。すなわち、本フローを継続しないと判定するか、又は、対象車両のドライバが自車両を認知していることを示す認知情報信号を受信するまで(S204 YES)、S204~S207を繰り返す。その間、自車両に対する他ドライバの認知状態は未認知であるという判定を維持する。
S208では、自車両に対する他ドライバの認知状態を、認知済みと判定してS209に移る。この場合、上述したように、他ドライバが自車両を認識していることを意味する。S209では報知制御部F8が、対象車両のドライバが自車両の存在を認知していることを示す情報を自ドライバに報知してS210に移る。より具体的には、報知制御部F8は、対象車両のドライバが自車両の存在を認知していることを示す画像やテキストを表示装置6に表示する。また、対象車両のドライバが自車両の存在を認知していることを示す音声を音声出力装置7から出力してもよい。
S210では、S208で自車両に対する他ドライバの認知状態は認知済みであると判定してから所定の時間(判定結果保持時間とする)経過したか否かを判定する。この判定結果保持時間は、認知済みという判定結果を保持する時間であって、適宜設計されればよい。本実施形態では一例として10秒とするが、5秒や15秒などであってもよい。
そして、S208で自車両に対する他ドライバの認知状態は認知済みであると判定してから判定結果保持時間経過した場合には、S210がYESとなってS211に移る。一方、判定結果保持時間経過していない間は、S210がNOとなってS210を繰り返す。
S211では、自車両に対する他ドライバの認知状態の判定結果を初期化して、すなわち、認知済みであるという判定結果を取り消して、S212に移る。S212では、S207と同様に、本フローを継続するか否かを判定する。S212で本フローを継続すると判定した場合には、S212がYESとなってS204に移る。一方、S212で本フローを継続しないと判定した場合には、S212がNOとなって本フローを終了する。
次に、図7に示すフローチャートを用いて、制御部1が実施する認知情報送信関連処理について説明する。この認知情報送信関連処理は、主として自ドライバ認知状態判定部F72が、他の機能ブロック(認知情報送信処理部F33)と協働して実施するものである。認知情報送信関連処理が備える各処理ステップのうち、自ドライバ認知状態判定部F72が実施する処理ステップに関しては、その処理ステップを実施する主体の記載を省略する。
この図7に示すフローチャートは、例えば、逐次(100ミリ秒毎に)実施される。なお、以下の処理も、前述の他ドライバ認知状態判定処理と同様に、周辺車両リストにおいて対象車両となっている全ての他車両毎に実施することとする。すなわち、図7に示すフローチャートの説明の中で言及する対象車両とは、周辺車両リストにおいて対象車両と設定されている他車両のうちの任意の1台を指す。
まず、S301では、自車両の位置情報と、対象車両の位置情報に基づいて、対象車両が、自車両の視認可能範囲内に存在するか否かを判定する。自車両の視認可能範囲は、自車両の位置情報、進行方向、及びメモリ11に登録されている視認可能範囲定義データに基づいて算出すればよい。
そして、対象車両が、自車両の視認可能範囲に存在する場合には、S301がYESとなってS302に移る。一方、自車両が対象車両の視認可能範囲に存在しない場合にはS301がNOとなって本フローを終了する。
なお、本実施形態では、対象車両と自車両との間に他の車両が存在し、当該他の車両によって、自車両の周辺監視システム3で対象車両を検出できていない場合には、対象車両は自車両の視認可能範囲に存在しないと判定する。もちろん、他の態様として、対象車両と自車両との間に他の車両が存在し、自車両の周辺監視システム3で対象車両を検出できていない場合であっても、対象車両が自車両の視認可能範囲に存在すると判定する構成としてもよい。
S302では、対象車両に対する自ドライバの認知状態を判定する処理(自ドライバ認知状態判定処理とする)を実施し、S303に移る。ここで、このS302で実施する自ドライバ認知状態判定処理について、図8に示すフローチャートを用いて説明する。
図8に示すフローチャートは前述の通り、図7のS302に移ったときに開始される。なお、他の態様として逐次実施し、処理の結果得られる認知状態を当該他車両と対応付けて保持していてもよい。
まず、S31では、対象車両の自車両に対する相対位置を取得し、その対象車両が存在する方向(対象車両方向とする)を取得する。S32では、視線検出部F6が検出している自ドライバの視線方向を取得する。
S33では、視線検出部F6が検出している自ドライバの視線方向に基づいて、自ドライバが対象車両を認知したか否かを判定する。例えば、S32で取得している自ドライバの視線方向が、S31で取得した対象車両方向と一致している時間が一定時間(視認判定時間とする)以上となっている場合に、自ドライバが対象車両を認知したと判定する。視認判定時間は、適宜設計されれば良く、ここでは1.5秒とする。
また、ドアミラーを介して自ドライバが間接的に見ることができる範囲に存在する場合には、自ドライバの視線方向が、当該対象車両が存在する側に対応するドアミラーが設置されている方向となっている時間が視認判定時間以上となっている場合に、自ドライバが対象車両を認知したと判定する。
ドアミラーを介して自ドライバが間接的に見ることができる範囲は、例えば、ドライバモニタ5が検出しているドライバの頭の位置と、ドラミラー角度センサが検出しているドアミラーの角度と、に基づいて決定すれば良い。また、ドライバの頭の位置に代わって、運転席のヘッドレストの位置を用いても良い。運転席のヘッドレストの位置は、運転席の座席の位置を検出する座席位置センサの出力値に基づいて決定してもよいし、標準的な座席の位置から決定してもよい。
さらに、周辺監視システム3が自車両の周辺を撮影するカメラ(例えば後方カメラ等)を備えてあって、そのカメラが撮影した、その対象車両が含まれている画像を表示装置6に表示している場合には、自ドライバの視線方向が、表示装置6が設置されている方向と一致している時間が視認判定時間以上となった場合に自ドライバが対象車両を認知したと判定してもよい。
自ドライバが対象車両を認知したと判定した場合には、S33がYESとなってS34に移る。また、自ドライバが対象車両を認知していないと判定した場合には、S33がNOとなってS35に移る。
S34では、対象車両に対する自ドライバの認知状態を、認知済みであると判定して、図7の認知情報送信関連処理に戻る。また、S35では、対象車両に対する自ドライバの認知状態を、未認知であると判定して、図7の認知情報送信関連処理に戻る。
図7のフローチャートに戻り、認知情報送信関連処理の続きを説明する。S303では、S302で実施した自ドライバ認知状態判定処理の結果、対象車両に対する自ドライバの認知状態が、認知済みであるか否かを判定する。対象車両に対する自ドライバの認知状態が認知済みである場合には、S303がYESとなってS304に移る。一方、対象車両に対する自ドライバの認知状態が未認知である場合には、S303がNOとなってS308に移る。
S304では認知情報送信処理部F33が、対象車両に向けて、自ドライバが対象車両を認知していることを示す認知情報信号を送信する。すなわち、認知フラグを1とした認知情報信号を対象車両に送信する。S304での処理が完了するとS305に移る。
S305では、認知情報信号を送信してから判定結果保持時間経過したか否かを判定する。認知情報信号を送信してから判定結果保持時間経過した場合には、S305がYESとなってS306に移る。一方、認知情報信号を送信してから判定結果保持時間経過していない場合には、S305がNOとなり、S305を繰り返して判定結果保持時間経過するまで待機する。S306では、対象車両に対する自ドライバの認知状態を未認知に戻して(すなわち初期化して)、S307に移る。
S307では、本フローを継続するか否かを判定する。本フローを継続すると判定する場合とは、例えば対象車両がまだ自車両の視認可能範囲に存在している場合である。また、本フローを継続しないと判定する場合とは、対象車両が自車両の視認可能範囲から退出した場合とする。
S307で本フローを継続すると判定した場合には、S307がYESとなってS302に移る。一方、S307で本フローを継続しないと判定した場合には、S307がNOとなって本フローを終了する。
S308では認知情報送信処理部F33が、対象車両に向けて、自ドライバが対象車両を認知していないことを示す認知情報信号を送信する。すなわち、認知フラグを0とした認知情報信号を対象車両に送信する。S308での処理が完了するとS309に移る。
S309では、自ドライバに対象車両を認知するように促す報知処理を実施して、S310に移る。より具体的には、報知制御部F8は、表示装置6に対象車両方向を視認するように促す内容の情報を表示する。また、報知制御部F8は、対象車両方向を視認するように促す音声を音声出力装置7から出力させてもよい。さらに、対象車両が存在する側のドアミラーに設けた照明装置(図示略)を点灯させたりするなどして、自車両のドライバに、対象車両方向を視認するように促してもよい。
S310では、S307と同様に、本フローを継続するか否かを判定する。S310で本フローを継続すると判定した場合には、S310がYESとなってS302に移る。一方、S310で本フローを継続しないと判定した場合には、S310がNOとなって本フローを終了する。
次に、図9を用いて、車両用認知通知システムの作動及び効果について説明する。図9は、車両Aが、車両Bを追い抜こうとしている状況を示す模式図である。車両Cは、車両Bにとっての先行車両である。車両Bが走行する車線は、車両Aが走行する車線に比べて混んでいるものとする。車両A及び車両Bはそれぞれ、車載システム10A及び10Bを搭載している。
また、図9中に示す一点鎖線20Aは車両Aの視認可能範囲を、一点鎖線20Bは車両Bの視認可能範囲をそれぞれ示す。すなわち、図9は、車両Aが車両Bの視認可能範囲に進入し、車両Bが車両Aの視認可能範囲に入った時点を表している。なお、便宜上、車両Aが車両Bからの認知情報信号を受信し、車両Bが車両Aに対して認知情報信号を送信するものとして以下の説明を行う。また、車両Aを自車両、車両Bを自車両Aにとっての他車両とする。
まず、自車両Aの車載システム10Aは、自車両Aが他車両Bの視認可能範囲に進入したこと(S201 YES)を受けて、他車両Bから認知情報信号が送信されてくるのを待機する(すなわち、受信待機状態となる)。そして、他車両Bからの認知情報信号を受信すると(S202 YES)、車両Aの他ドライバ認知状態判定部F71は、その認知情報信号に基づいて、他車両Bのドライバが自車両Aを認知しているか否かを判定する(S204)。
ここで、他車両Bの自ドライバ認知状態判定部F72が、他車両Bのドライバが車両Aを認知していると判定している場合(S303 YES)、車両Bは、車両Bのドライバが車両Aを認知していることを示す認知情報信号を送信する(S304)。すなわち、車両Aが受信した認知情報信号は、車両Bのドライバが車両Aを認知していることを示す内容となっている(S204 YES)。そして、車両Aの報知制御部F8は、車両Bのドライバは車両Aを認知していることを、表示装置6や音声出力装置7などを介して車両Aのドライバに報知する(S209)。
すなわち、以上の構成によれば、自車両Aのドライバは、他車両のドライバが自車両Aを認知していることを認識できる。
また、他車両Bの自ドライバ認知状態判定部F72が、他車両Bのドライバが車両Aを認知していないと判定している場合(S303 NO)、車両Bは、車両Bのドライバが車両Aを認知していないことを示す認知情報信号を送信する(S308)。すなわち、車両Aが受信した認知情報信号は、車両Bのドライバが車両Aを認知していないことを示す内容となっている(S204 NO)。そして、車両Aの報知制御部F8は、車両Bのドライバは車両Aを認知していないことを、表示装置6や音声出力装置7などを介して車両Aのドライバに報知する(S206)。
したがって、以上の構成によれば、自車両Aのドライバは、他車両のドライバが自車両Aを認知していないことを認識できる。例えば、図9の状況においては、自車両のドライバは、追い抜こうとしている他車両Bのドライバが自車両を認知していないことを知ることによって、車両Bが急に自車両Aが走行している車線に車線変更してくるかもしれないなどの予測をたてることができる。
さらに、本実施形態において車両Aの他ドライバ認知状態判定部F71は、車両Bの視認可能範囲に進入してから一定時間経過しても、車両Bからの認知情報信号を受信しなかった場合には(S202 NO)、車両Bのドライバが自車両を認知しているか否かは不明であると判定し(S203)、車両Aのドライバにその旨を報知する。
したがって、自車両Aのドライバは、他車両Bのドライバが自車両Aの存在を認知しているか否かは不明であるという情報を得ることができる。他車両Bのドライバが自車両Aの存在を認知しているかが不明である場合、車両Aのドライバは、車両Bのドライバが自車両Aを認知していない場合と同様に、車両Bが自車両Aの走行車線に車線変更してくるかもしれないなどの予測をたてることができる。
なお、本実施形態では、自車両Aの他ドライバ認知状態判定部F71は、一度他車両Bのドライバが自車両Aを認知していると判定してから、判定結果保持時間経過した場合には、その判定結果を取り消す。そして、再び他車両Bのドライバの自車両Aに対する認知状態を判定する構成とした。これによって、自車両Aと他車両Bとが並走している状態が、判定結果保持時間以上継続して、他車両Bのドライバの自車両Aに対する意識が薄くなっている場合には、未認知に戻すことができる。
また、以上では、図9における車両Aを自車両、車両Bを他車両として、本実施形態の作動及び効果を述べたが、もちろん、それぞれが逆の立場となることもある。以下では、車両Aを他車両、車両Bを自車両とした場合の、自車両Bにおける作動及び効果について述べる。
まず、自車両Bの車載システム10Aは、他車両Aが自車両Bの視認可能範囲に進入したこと(S301 YES)を受けて、自ドライバ認知状態判定部F72が自ドライバ認知状態判定処理を実施し(S302)、自車両Bのドライバが他車両Aを認知しているか否かを判定する。自車両Bのドライバが他車両Bを認知していると判定した場合には(S303 YES)、自車両Bのドライバが他車両Bを認知していることを示す認知情報信号を他車両Bに送信する。
すなわち、以上で述べた本実施形態の構成によれば、他車両Aに対して、自車両Bのドライバが当該他車両Aを認知していることを通知することができる。
なお、自ドライバ認知状態判定部F72が、自車両Bのドライバが他車両Aを認知していないと判定した場合には(S303 NO)、報知制御部F8は、自車両Bのドライバに対して、他車両Aの存在を確認するように促す報知を実施する。これによって、自車両Bのドライバは、他車両Aを認知しやすくなる。
また、自車両Bのドライバが他車両Aを認知していないと判定されている場合であって、かつ、他車両Aが自車両Bの視認可能範囲内に存在する場合(S310 YES)には、自ドライバ認知状態判定処理は逐次実施される。このため、その後、自車両Bのドライバが他車両Aを認知した場合には、自車両Bのドライバが他車両Aを認知していることを示す認知情報信号が他車両Aに送信される。
なお、以上では、各車両A、及び車両Bの組み合わせにおいて、何れか一方が認知情報信号を送信し、他方が認知情報信号を受信する構成としたが、車両A及び車両Bのそれぞれが相手に向けて認知情報信号を送信する構成としてもよい。すなわち、車両Aは、車両Bからの認知情報信号を受信する一方、車両Bに対して認知情報信号を送信してもよい。
また、以上では、追い抜き/追い抜かれの状況において認知情報信号を送受信する例を示したが、もちろん、その他の状況にも適用することができる。例えば交差点に進入する状況において、認知情報信号を送受信することで、ドライバ同士の認識をすり合わせることができ、交差点付近での衝突の可能性を低減することができる。 以上、本開示の実施形態を説明したが、本開示は上述の実施形態に限定されるものではなく、以下に述べる変形例も本開示の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
(変形例1)
変形例1の制御部1は、図10Aと図10Bに示すように上述した機能ブロック(F1~F8)に加えて、位置関係変化検出部F9を備える。位置関係変化検出部F9は、自車両と、自車両周辺を走行する他車両との相対位置、及びその相対位置の時間変化から、両者の位置関係を変更しようとする、自車両及び他車両の少なくとも何れか一方の動作を検出する。ここでの位置関係の変更とは、先行車両となる車両や後続車両となる車両を変更することを指す。なお、ここでの相対位置の時間変化とは、相対速度によって表されてもよい。また、相対速度を時間微分して定まる相対加速度によって表されても良い。
変形例1の制御部1は、図10Aと図10Bに示すように上述した機能ブロック(F1~F8)に加えて、位置関係変化検出部F9を備える。位置関係変化検出部F9は、自車両と、自車両周辺を走行する他車両との相対位置、及びその相対位置の時間変化から、両者の位置関係を変更しようとする、自車両及び他車両の少なくとも何れか一方の動作を検出する。ここでの位置関係の変更とは、先行車両となる車両や後続車両となる車両を変更することを指す。なお、ここでの相対位置の時間変化とは、相対速度によって表されてもよい。また、相対速度を時間微分して定まる相対加速度によって表されても良い。
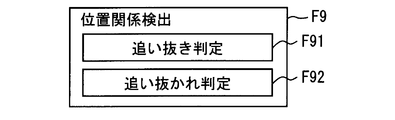
位置関係変化検出部F9は、より細かい機能ブロックとして、追い抜き判定部F91、及び追い抜かれ判定部F92を備える。なお、位置関係変化検出部F9が実施する処理は、自車両周辺を走行する他車両のそれぞれに対して実施する。ここでの自車両周辺を走行する他車両とは、周辺監視システム3で検出している他車両としてもよいし、自車両の視認可能範囲に存在する他車両としてもよい。
追い抜き判定部F91は、自車両が他車両を追い抜こうとしているか否かを判定する。自車両が他車両を追い抜く状況としては、自車両が走行している車線(自車走行車線とする)において自車両前方を走行している他車両を追い抜く場合や、自車走行車線に隣接し、その進行方向が自車走行車線と等しい車線(隣接車線とする)において自車前方を走行する他車両を追い抜く場合などが考えられる。
ここでは、一例として、追い抜き判定部F91が、隣接車線において自車両前方を走行する車線を走行する他車両を、自車両が追い抜こうとしているか否かを判定する場合の処理について述べる。以降では、自車走行車線において自車両前方を走行している他車両のうち、最も自車両に近い他車両を正面先行車両と称し、隣接車線において自車両前方を走行する他車両のうち、最も自車両に近い他車両を側方先行車両と称する。なお、同じ車線を走行しているか否かは周知の車線検出技術を適用すればよい。
追い抜き判定部F91は、まず、自車両に対する他車両の相対位置から、当該他車両が、側方先行車両であるか否かを判定する。次に、当該他車両が、側方先行車両である場合には、自車走行車線において、当該自車走行車線での走行を維持したまま、当該他車両を追い抜くことができるか否かを判定する。当該自車走行車線での走行を維持したまま、当該他車両を追い抜くことができる場合とは、自車走行車線において少なくとも当該他車両の側方の領域まで正面先行車両が存在しない場合などである。当該他車両を追い抜くことができると判定した場合には、自車両と他車両との相対位置の時間変化から、自車両が当該他車両を追い抜こうとしているか否かを判定する。
ここで、自車両が当該他車両を追い抜こうとしていると判定する場合とは、自車両と当該他車両との距離が時間の経過に伴って小さくなっている場合、すなわち、自車両が当該他車両に接近していっている場合などである。また、自車両が当該他車両に接近する場合とは、自車両に対する他車両の相対速度が負である場合を意味する。したがって、自車両に対する他車両の相対速度が負である場合に、自車両が当該他車両を追い抜こうとしていると判定してもよい。さらに、自車両に対する当該他車両の相対化速度が負となっている場合に、自車両が当該他車両を追い抜こうとしていると判定してもよい。
以上のようにして、追い抜き判定部F91は、自車両が側方先行車両を追い抜こうとしているか否かを判定する。そして、追い抜き判定部F91が、自車両が側方先行車両を追い抜こうとしていると判定したことに基づいて、他ドライバ認知状態判定部F71は、自車両が追い抜こうとしている他車両を対象とする他ドライバ認知状態判定処理を開始する。また、追い抜き判定部F91によって自車両が側方先行車両を追い抜こうとしていると判定されている場合には、制御部1は自車両が追い抜こうとしている他車両を対象とする認知情報送信関連処理を実施しないこととする。これに伴って、自ドライバ認知状態判定部F72は、当該他車両に対する自ドライバ認知状態判定処理を実施しない。
なお、以上では、追い抜き判定部F91が、自車両が側方先行車両に相当する他車両を追い抜こうとしているか否かを判定する場合の処理について説明したが、正面先行車両に相当する他車両を追い抜こうとしているか否かを判定する処理についても、適宜、他車両を追い抜こうとしていると判定する条件を設計すればよい。
ところで、自車両が正面先行車両に相当する他車両を追い抜こうとしている場合、車線変更を実施した後は、側方先行車両に相当する他車両を追い抜こうとする状況と、同じ状況となる。したがって、正面先行車両を追い抜こうとしているか否かを判定する処理についても以上で述べた処理と同様の判定条件を適用することもできる。
追い抜かれ判定部F92は、自車両が他車両に追い抜かれようとしているか否か、すなわち、他車両が自車両を追い抜こうとしているか否かを判定する。自車両が他車両に追い抜かれる状況としては、自車走行車線において自車両後方を走行している他車両に追い抜かれる場合や、隣接車線において自車を走行する他車両に追い抜かれる場合などが考えられる。
ここでは、一例として、追い抜かれ判定部F92が、隣接車線を走行する他車両を追い抜こうとしているか否かを判定する場合の処理について述べる。以降では、自車走行車線において自車両後方を走行している他車両のうち、最も自車両に近い他車両を背面後続車両と称し、隣接車線において自車両後方を走行する他車両のうち、最も自車両に近い他車両を側方後続車両と称する。
追い抜かれ判定部F92は、まず、自車両に対する他車両の相対位置から、当該他車両が、側方後続車両であるか否かを判定する。当該他車両が側方先行車両である場合には、当該他車両が自車両を追い抜くことができるか否かを判定する。当該他車両が自車両を追い抜くことができる場合とは、その側方後続車両が走行する車線において自車両側方に相当する領域から自車両斜め前方に相当する領域までに、別の他車両が存在しない場合などである。当該他車両が自車両を追い抜くことができると判定した場合には、自車両と他車両との相対位置の時間変化に基づいて、自車両が当該他車両を追い抜こうとしているか否かを判定する。
ここで、当該他車両が自車両を追い抜こうとしていると判定する場合とは、自車両と当該他車両との距離が時間の経過に伴って小さくなっている場合、すなわち、当該他車両が自車両に接近してきている場合などである。なお、他車両が自車両に接近する場合とは、自車両に対する他車両の相対速度が正である場合を意味する。また、その他、自車両に対する当該他車両の相対化速度が正となっている場合に、他車両が自車両を追い抜こうとしていると判定してもよい。
以上のようにして、追い抜かれ判定部F92は、側方後続車両が自車両を追い抜こうとしているか否か、すなわち、自車両が後方後続車両に追い抜かれようとしているか否かを判定する。そして、追い抜かれ判定部F92が、自車両が側方先行車両に追い抜かれようとしていると判定したことに基づいて、自ドライバ認知状態判定部F72は、自車両を追い抜こうとしている他車両を対象とする自ドライバ認知状態判定処理を開始する。
また、追い抜かれ判定部F92が、自車両が側方先行車両に追い抜かれようとしていると判定している場合には、自車両を追い抜こうとしている他車両を対象とする他ドライバ認知状態判定処理を実施しない構成とする。
なお、以上では、追い抜かれ判定部F92が、側方後続車両に相当する他車両が自車両を追い抜こうとしているか否かを判定する場合の処理について説明したが、背面後続車両に相当する他車両が自車両を追い抜こうとしているか否かを判定する処理についても、適宜、他車両を追い抜こうとしていると判定する条件を設計すればよい。
以上のような変形例1の構成によれば、例えば、先行車両や後続車両といった位置関係を変更しようとしている自車両と他車両の組み合わせにおいて、認知情報信号を送信する側となる車両と、認知情報信号を受信する側となる車両とを区別することができる。
例えば、自車両が側方先行車両に相当する他車両を追い抜こうとしている場合、実施形態で述べたように、当該他車両のドライバが自車両を認知しているか否かといった情報は自車両のドライバにとっては有用であるといえる。しかしながら、側方先行車両に相当する他車両のドライバにとって、自車両のドライバが当該側方先行車両を認知しているか否かは有用ではない可能性が高い。
このような場合に、自車両の車載システム10が、当該他車両に対して認知情報信号を送信してしまうと、当該他車両のドライバにとっては、有用ではない情報が報知されることになり、かえって当該他車両のドライバに煩わしさを与えてしまう可能性が生じる。
一方、この変形例1のような構成によれば、追い抜く側の車両(追抜車両とする)は、その車両が追い抜こうとする車両(被追抜車両とする)を対象とする自ドライバ認知状態判定処理を実施せず、当該被追抜車両に対して認知情報信号も送信しない。また、被追抜車両の制御部1は、追抜車両を対象とする他ドライバ認知状態判定処理を実施しない。このため、被追抜車両のドライバに対して、被追抜車両に対する追抜車両のドライバの認知状態が報知されることを防ぐことができる。すなわち、被追抜車両のドライバに有用性の低い情報が報知されることを防ぐことができる。
なお、以上では位置関係変化検出部F9が、自車両が他車両を追い抜こうとする動作や、他車両が自車両を追い抜こうとする動作を検出する例を述べた。しかし、位置関係変化検出部F9が検出する、位置関係を変更しようとする自車両又は他車両による動作は、これらに限らない。例えば、自車両や他車両が車線変更しようとする動作や、正面先行車両と背面後続車両の関係にある複数の他車両の間に割り込もうとする自車両の動作、さらには、自車両と、自車両の正面先行車との間に割り込もうとする他車両の動きなどを検出してもよい。
これらの動きは、例えば自車両又は他車両の方向指示レバーの位置が、方向指示レバーの位置が右折位置や左折位置になっているかに基づいて判定すれば良い。自車両の方向指示レバーの位置は、車載センサ群4が備える方向指示レバー位置センサから取得すればよい。また、他車両の方向指示レバーの位置は、車両情報に含まれている場合には、車両情報から取得すればよい。そして、方向指示レバーの位置が右折位置や左折位置になっている場合に、その車両が車線変更しようとしていると判定すればよい。
また、周知の車線検出技術を用いて自車走行車線の定義づける白線を検出し、自車両や他車両が当該白線に接近したり、当該白線を越える動作を検出した場合に、車線変更していると判定すればよい。
当該車線変更をしようとしている車両が他車両である場合には、その他車両、自車両、及びその他の周辺車両の位置関係から、割り込みをしようとしているか否かを判定すれば良い。例えば、進行方向において、正面先行車両と自車両との間に存在する側方先行車両が、車線変更しようとしている場合には、割り込みをしようとしていると判定すればよい。
(変形例2)
前述の実施形態及び変形例1では、自車両のドライバが、他車両を認知していない場合も、その旨を示す認知情報信号を当該他車両に送信する構成としたが、これに限らない。自車両のドライバが他車両を認知している場合に、当該他車両に向けてその旨を示す信号(認知済み信号とする)を送信し、自車両のドライバが他車両を認知していない場合にはその旨を示す信号を送信しない構成としてもよい。この認知済み信号が本開示の信号に相当する。もちろん、他車両も同様である。すなわち、他車両は、当該他車両のドライバが自車両を認知している場合のみ、自車両に向けて認知済み信号を送信する。
前述の実施形態及び変形例1では、自車両のドライバが、他車両を認知していない場合も、その旨を示す認知情報信号を当該他車両に送信する構成としたが、これに限らない。自車両のドライバが他車両を認知している場合に、当該他車両に向けてその旨を示す信号(認知済み信号とする)を送信し、自車両のドライバが他車両を認知していない場合にはその旨を示す信号を送信しない構成としてもよい。この認知済み信号が本開示の信号に相当する。もちろん、他車両も同様である。すなわち、他車両は、当該他車両のドライバが自車両を認知している場合のみ、自車両に向けて認知済み信号を送信する。
そして、自車両の車載システム10は、他車両から認知済み信号を受信した場合に、自車両のドライバに対して、他車両のドライバが自車両を認知していることを報知する。このような構成においても、自車両のドライバは、他車両のドライバが自車両を認知していることを認識できる。
(その他の変形例)
本実施形態では、自車両と対象車両の通信は、車車間通信で行う構成としたが、もちろんこれに限らない。自車両と他車両との通信は、車両外部に設けられたサーバなどを介して実施してもよい。
本実施形態では、自車両と対象車両の通信は、車車間通信で行う構成としたが、もちろんこれに限らない。自車両と他車両との通信は、車両外部に設けられたサーバなどを介して実施してもよい。
また、以上では、他ドライバの自車両に対する認知状態として、認知済み、未認知、不明の3つに区別する構成としたが、これに限らない。未認知と不明とをまとめて、認知済みと不明だけであってもよい。
また、以上では、図7の認知情報送信関連処理のS302において自ドライバ認知状態判定処理を実施する構成としたが、これに限らない。自ドライバ認知状態判定部F72は、自ドライバ認知状態判定処理を、認知情報送信関連処理とは独立して逐次実施しておき、その判定結果は、周辺車両リストの車両IDなどと対応付けて保存しておけば良い。このような構成によれば、認知情報送信関連処理のS302では、その時点においてすでに判定されてある自ドライバの認知状態を取得して、S303の判定を実施すればよい。
また、以上では、対象車両の視認可能範囲に自車両が入ったか否かに基づいて、他ドライバ認知状態判定処理を実施する構成としたがこれに限らない。自車両から、他ドライバ認知状態判定処理の対象とする他車両に、認知情報信号を送信するように要求する認知情報要求信号を送信したことを起点に、他ドライバ認知状態判定処理を実施する構成としてもよい。 さらに、以上では対象車両が自車両の視認可能範囲に入ったか否かに基づいて、認知情報送信関連処理を実施する構成としたがこれに限らない。他車両から、認知情報信号を送信するように要求する認知情報要求信号を受信したことを起点に、自ドライバ認知状態判定処理を実施し、当該他車両に対して認知情報信号を返送する構成としてもよい。
また、上述した認知情報要求信号は、他車両と自車両との位置関係に基づいて、自動的に送信する構成としてもよいし、自車両のドライバが入力装置8を操作したことに基づいて送信してもよい。
この出願に記載されるフローチャート、あるいは、フローチャートの処理は、複数のステップ(あるいはセクションと言及される)から構成され、各ステップは、たとえば、S101と表現される。さらに、各ステップは、複数のサブステップに分割されることができる、一方、複数のステップが合わさって一つのステップにすることも可能である。
以上、本開示の実施形態、構成、態様を例示したが、本開示に係る実施形態、構成、態様は、上述した各実施形態、各構成、各態様に限定されるものではない。例えば、異なる実施形態、構成、態様にそれぞれ開示された技術的部を適宜組み合わせて得られる実施形態、構成、態様についても本開示に係る実施形態、構成、態様の範囲に含まれる。
Claims (12)
- 自車両に搭載され、
他車両から送信された、当該他車両のドライバが自車両を認知していることを示す信号を受信する認知情報受信処理部(F34)と、
前記認知情報受信処理部(F34)が前記信号を受信した場合には、前記他車両のドライバが自車両を認知していることを、自車両のドライバに報知する報知制御部(F8)と、を備える車両用認知通知装置。 - 請求項1において、
前記認知情報受信処理部(F34)は、他車両から送信された、当該他車両のドライバが自車両を認知しているか否かを示す認知情報信号を受信し、
前記認知情報受信処理部(F34)が受信した認知情報信号に基づいて、前記他車両のドライバが自車両を認知しているか否かを判定する他ドライバ認知状態判定部(F71)を備え、
前記報知制御部(F8)は、前記他ドライバ認知状態判定部(F71)が前記認知情報信号に基づいて判定した結果を、自車両のドライバに報知する車両用認知通知装置。 - 請求項2において、
所定の他車両に対して、自車両のドライバが当該他車両を認知しているか否かを判定する自ドライバ認知状態判定部(F72)と、
前記自ドライバ認知状態判定部(F72)が判定した結果に基づいて、自車両のドライバが当該他車両を認知しているか否かを示す前記認知情報信号を当該他車両に送信する認知情報送信処理部(F33)と、を備える車両用認知通知装置。 - 請求項3において、
自車両の位置を取得する自車位置取得部(F1)と、
前記他車両が送信した、当該他車両の位置を特定するための情報を含む車両情報を受信する車両情報受信処理部(F32)と、
前記車両情報受信処理部(F32)が受信した前記車両情報に基づいて、前記他車両の位置を取得する他車位置取得部(F41)と、
自車両のドライバの視線方向を検出する視線検出部(F6)と、を備え、
前記自ドライバ認知状態判定部(F72)は、
前記視線検出部(F6)が検出した前記視線方向と、前記自車位置取得部(F1)が取得した自車両の位置と、前記他車位置取得部(F41)が取得した前記他車両の位置と、に基づいて、自車両のドライバが前記他車両を認知しているか否かを判定する車両用認知通知装置。 - 請求項4において、
前記自ドライバ認知状態判定部(F72)は、
前記自車位置取得部(F1)が取得した自車両の位置と、前記他車位置取得部(F41)が取得した前記他車両の位置と、に基づいて、前記他車両が自車両の所定の視認可能範囲に存在するか否かを判定し、
前記他車両が前記他車両の前記視認可能範囲に存在すると判定した場合に、自車両のドライバが当該他車両を認知しているか否かを判定する車両用認知通知装置。 - 請求項4又は5において、
前記他ドライバ認知状態判定部(F71)は、
前記自車位置取得部(F1)が取得した自車両の位置と、前記他車位置取得部(F41)が特定した前記他車両の位置と、に基づいて、自車両が前記他車両の所定の視認可能範囲に存在するか否かを判定し、
自車両が前記他車両の前記視認可能範囲に存在すると判定してから一定時間内に前記他車両から前記認知情報信号を受信しなかった場合には、前記他車両のドライバが自車両を認知しているか否かを表す認知状態は不明であると判定し、
自車両が前記他車両の所定の視認可能範囲に存在すると判定してから一定時間内に、前記他車両から、前記他車両のドライバが自車両を認知していることを示す前記認知情報信号を受信した場合には、前記他車両のドライバは自車両を認知していると判定し、
自車両が前記他車両の所定の視認可能範囲に存在すると判定してから一定時間内に、前記他車両から、前記他車両のドライバが自車両を認知していないことを示す前記認知情報信号を受信した場合には、前記他車両のドライバは自車両を認知していないと判定する車両用認知通知装置。 - 請求項5又は6において、
自車両の周辺に存在する複数の他車両のうち、前記自ドライバ認知状態判定部(F72)による判定の対象とする前記他車両を対象車両に設定する対象車両設定部(F5)を備え、
前記自ドライバ認知状態判定部(F72)は、前記対象車両設定部(F5)によって対象車両に設定されている前記他車両が自車両の前記視認可能範囲に存在する場合に、自車両のドライバが当該他車両を認知しているか否かを判定し、
前記対象車両設定部(F5)は、複数の前記他車両のうち、自車両と進行方向が一定角度以内であって、かつ、所定の対象車両設定用距離以内に存在する前記他車両を、前記対象車両に設定する車両用認知通知装置。 - 請求項4から7の何れか1項において、
自車両の位置と前記他車両の位置から定まる自車両に対する前記他車両の相対位置に基づいて、自車両と当該他車両との位置関係を特定するとともに、その自車両と当該他車両との位置関係を変更しようとする前記他車両の動作を検出する位置関係変化検出部(F9)を備え、
前記認知情報送信処理部(F33)は、前記位置関係変化検出部(F9)が自車両と当該他車両との位置関係を変更しようとする前記他車両の動作を検出したことに基づいて、前記認知情報信号を当該他車両に送信する車両用認知通知装置。 - 請求項8の何れか1項において、
前記位置関係変化検出部(F9)は、前記他車両が自車両を追い抜こうとしているか否かを判定する、追い抜かれ判定部(F92)を備え、
前記認知情報送信処理部(F33)は、前記追い抜かれ判定部(F92)が、前記他車両が自車両を追い抜こうとしていると判定したことに基づいて、前記認知情報信号を当該他車両に送信する車両用認知通知装置。 - 請求項4から9の何れか1項において、
自車両の位置と前記他車両の位置から定まる自車両に対する前記他車両の相対位置に基づいて、自車両と当該他車両との位置関係を特定するとともに、その自車両と当該他車両との位置関係を変更しようとする自車両の動作を検出する位置関係変化検出部(F9)を備え、
前記他ドライバ認知状態判定部(F71)は、前記位置関係変化検出部(F9)が自車両と当該他車両との位置関係を変更しようとする自車両の動作を検出したことに基づいて、前記他車両のドライバが自車両を認知しているか否かを判定する処理を開始する車両用認知通知装置。 - 請求項10において、
前記位置関係変化検出部(F9)は、自車両が前記他車両を追い抜こうとしているか否かを判定する追い抜き判定部(F91)を備え、
前記追い抜き判定部(F91)が、自車両が前記他車両を追い抜こうとしていると判定した場合に、前記他ドライバ認知状態判定部(F71)は、前記他車両のドライバが自車両を認知しているか否かを表す認知状態を判定する処理を開始する車両用認知通知装置。 - 第1車両に搭載されている第1車両用認知通知装置(1A)と、第2車両に搭載されている第2車両用認知通知装置(1B)と、備える車両用認知通知システム(100)であって、
前記第1車両用認知通知装置(1A)は、前記第1車両のドライバが前記第2車両を認知しているか否かを判定する自ドライバ認知状態判定部(F72)と、
前記自ドライバ認知状態判定部(F72)が前記第1車両のドライバが前記第2車両を認知していると判定した場合には、前記第1車両のドライバが前記第2車両を認知していることを示す信号を前記第2車両に送信する認知情報送信処理部(F33)と、を備え、
前記第2車両用認知通知装置(1B)は、
前記第1車両から送信された、前記信号を受信する認知情報受信処理部(F34)と、
前記認知情報受信処理部(F34)が前記信号を受信した場合には、前記第1車両のドライバが前記第2車両を認知していることを前記第2車両のドライバに報知する報知制御部(F8)と、を備える車両用認知通知システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201580017189.8A CN106415693B (zh) | 2014-03-28 | 2015-03-16 | 车辆用认知通知装置、车辆用认知通知系统 |
| US15/126,088 US9747800B2 (en) | 2014-03-28 | 2015-03-16 | Vehicle recognition notification apparatus and vehicle recognition notification system |
| DE112015001534.5T DE112015001534B4 (de) | 2014-03-28 | 2015-03-16 | Fahrzeugerkennungsbenachrichtigungsvorrichtung und Fahrzeugerkennungsbenachrichtigungssystem |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-070022 | 2014-03-28 | ||
| JP2014070022A JP6252304B2 (ja) | 2014-03-28 | 2014-03-28 | 車両用認知通知装置、車両用認知通知システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015146061A1 true WO2015146061A1 (ja) | 2015-10-01 |
Family
ID=54194612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/001446 WO2015146061A1 (ja) | 2014-03-28 | 2015-03-16 | 車両用認知通知装置、車両用認知通知システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9747800B2 (ja) |
| JP (1) | JP6252304B2 (ja) |
| CN (1) | CN106415693B (ja) |
| DE (1) | DE112015001534B4 (ja) |
| WO (1) | WO2015146061A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019197526A (ja) * | 2018-03-14 | 2019-11-14 | ホンダ リサーチ インスティテュート ヨーロッパ ゲーエムベーハーHonda Research Institute Europe GmbH | 自車両の操作を支援するための方法、他の交通参加者を支援するための方法、ならびに対応する支援システムおよび車両 |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6252304B2 (ja) | 2014-03-28 | 2017-12-27 | 株式会社デンソー | 車両用認知通知装置、車両用認知通知システム |
| US9959765B2 (en) * | 2015-07-20 | 2018-05-01 | Dura Operating Llc | System and method for providing alert to a vehicle or an advanced driver assist system based on vehicle dynamics input |
| JP6447749B2 (ja) * | 2015-12-15 | 2019-01-09 | 株式会社村田製作所 | 運転支援情報伝送システム、受信機、運転支援システム、及び運転支援情報伝送方法 |
| US20170327037A1 (en) * | 2016-05-10 | 2017-11-16 | Ford Global Technologies, Llc | Adaptive rear view display |
| JP2017212579A (ja) * | 2016-05-25 | 2017-11-30 | 住友電気工業株式会社 | 通信機および移動通信機 |
| JP6765100B2 (ja) | 2016-08-31 | 2020-10-07 | 学校法人早稲田大学 | 視野外障害物検知システム |
| CN108501949B (zh) * | 2017-02-27 | 2022-11-22 | 松下电器(美国)知识产权公司 | 信息处理装置以及记录介质 |
| JP6515125B2 (ja) * | 2017-03-10 | 2019-05-15 | 株式会社Subaru | 画像表示装置 |
| JP6722132B2 (ja) * | 2017-04-27 | 2020-07-15 | クラリオン株式会社 | 推奨運転出力装置、推奨運転出力方法、及び推奨運転出力システム |
| WO2018207243A1 (ja) * | 2017-05-09 | 2018-11-15 | 三菱電機株式会社 | 車載認証システム、車載認証方法および車載認証プログラム |
| JP7162233B2 (ja) | 2017-06-08 | 2022-10-28 | 学校法人早稲田大学 | 障害物探知システム |
| JP6894354B2 (ja) * | 2017-11-24 | 2021-06-30 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2019125039A (ja) * | 2018-01-12 | 2019-07-25 | トヨタ自動車株式会社 | 判定装置、判定方法及びプログラム |
| US10623834B1 (en) * | 2018-01-15 | 2020-04-14 | United Services Automobile Association (Usaa) | Vehicle tracking techniques |
| JP7003689B2 (ja) * | 2018-01-29 | 2022-01-20 | トヨタ自動車株式会社 | 制御装置およびエージェント連携方法 |
| JP2019159638A (ja) * | 2018-03-12 | 2019-09-19 | 矢崎総業株式会社 | 車載システム |
| JP6823003B2 (ja) * | 2018-03-29 | 2021-01-27 | 本田技研工業株式会社 | 出力装置 |
| DE112018007487T5 (de) * | 2018-04-16 | 2021-04-22 | Mitsubishi Electric Corporation | Fahrzeugkommunikationsvorrichtung |
| CN109448409A (zh) * | 2018-10-30 | 2019-03-08 | 百度在线网络技术(北京)有限公司 | 交通信息交互的方法、装置、设备和计算机存储介质 |
| JP7053438B2 (ja) * | 2018-11-26 | 2022-04-12 | 株式会社東芝 | 電子装置、電子システム、方法、およびプログラム |
| JP7234614B2 (ja) * | 2018-12-10 | 2023-03-08 | トヨタ自動車株式会社 | 異常検出装置、異常検出システム及び異常検出プログラム |
| JP7095591B2 (ja) * | 2018-12-28 | 2022-07-05 | トヨタ自動車株式会社 | 報知装置及び車両制御装置 |
| CN113454692B (zh) * | 2019-02-19 | 2024-04-16 | Sk电信有限公司 | 驾驶信息提供方法以及车辆地图提供服务器和方法 |
| KR20200106102A (ko) * | 2019-02-21 | 2020-09-11 | 현대자동차주식회사 | 저비용 자율 주행 셔틀 운행 방법 및 장치 |
| JP7197416B2 (ja) * | 2019-03-28 | 2022-12-27 | 株式会社デンソーテン | 制御装置、及び、制御部の動作方法 |
| CN112153567A (zh) * | 2019-06-28 | 2020-12-29 | 大陆泰密克汽车系统(上海)有限公司 | 用于构建实时区域电子地图的方法和车辆 |
| CN110356344A (zh) * | 2019-07-24 | 2019-10-22 | 重庆长安汽车股份有限公司 | 一种应用于全景系统的车载事件记录方法、系统及汽车 |
| US11651692B2 (en) * | 2021-10-07 | 2023-05-16 | Qualcomm Incorporated | Presenting relevant warnings to a vehicle operator |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007249757A (ja) * | 2006-03-17 | 2007-09-27 | Denso It Laboratory Inc | 警報装置 |
| JP2008210051A (ja) * | 2007-02-23 | 2008-09-11 | Mazda Motor Corp | 車両用運転支援システム |
| JP2009134704A (ja) * | 2007-11-05 | 2009-06-18 | Fujitsu Ten Ltd | 周辺監視装置、安全走行支援システム、及び車両 |
| JP2010238053A (ja) * | 2009-03-31 | 2010-10-21 | Hino Motors Ltd | 並走警報装置、車両およびプログラム |
| JP2013206183A (ja) * | 2012-03-28 | 2013-10-07 | Fujitsu Ltd | 事故予防装置、事故予防方法およびプログラム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3884815B2 (ja) * | 1997-03-03 | 2007-02-21 | 本田技研工業株式会社 | 車両用情報表示装置 |
| JP3773040B2 (ja) | 2001-10-31 | 2006-05-10 | 本田技研工業株式会社 | 車両用認知支援システム |
| US20050128063A1 (en) | 2003-11-28 | 2005-06-16 | Denso Corporation | Vehicle driving assisting apparatus |
| JP4645891B2 (ja) | 2005-03-24 | 2011-03-09 | 日本精機株式会社 | 車両用運転支援装置及び車両用運転支援方法 |
| JP4797588B2 (ja) * | 2005-11-17 | 2011-10-19 | アイシン精機株式会社 | 車両周辺表示装置 |
| JP5171629B2 (ja) * | 2006-09-04 | 2013-03-27 | パナソニック株式会社 | 走行情報提供装置 |
| JP5050735B2 (ja) * | 2007-08-27 | 2012-10-17 | マツダ株式会社 | 車両用運転支援装置 |
| WO2009060581A1 (ja) * | 2007-11-05 | 2009-05-14 | Fujitsu Ten Limited | 周辺監視装置、安全走行支援システム、及び車両 |
| JP2010287162A (ja) * | 2009-06-15 | 2010-12-24 | Aisin Aw Co Ltd | 運転支援装置及びプログラム |
| JP5353999B2 (ja) * | 2011-04-01 | 2013-11-27 | 株式会社デンソー | 運転者支援装置 |
| JP5742937B2 (ja) * | 2011-06-02 | 2015-07-01 | トヨタ自動車株式会社 | 車両用視界支援装置 |
| WO2013011588A1 (ja) * | 2011-07-21 | 2013-01-24 | トヨタ自動車株式会社 | 車両用情報伝達装置 |
| DE112012003322T5 (de) * | 2011-08-11 | 2014-04-30 | Ford Global Technologies, Llc | System und Verfahren zum Festlegen akustischer Metriken zur Detektion von Fahruntüchtigkeit des Fahrers |
| JP5965803B2 (ja) | 2012-09-27 | 2016-08-10 | 株式会社マンダム | デオドラント組成物及びデオドラント剤 |
| JP6252304B2 (ja) | 2014-03-28 | 2017-12-27 | 株式会社デンソー | 車両用認知通知装置、車両用認知通知システム |
-
2014
- 2014-03-28 JP JP2014070022A patent/JP6252304B2/ja not_active Expired - Fee Related
-
2015
- 2015-03-16 CN CN201580017189.8A patent/CN106415693B/zh not_active Expired - Fee Related
- 2015-03-16 DE DE112015001534.5T patent/DE112015001534B4/de not_active Expired - Fee Related
- 2015-03-16 WO PCT/JP2015/001446 patent/WO2015146061A1/ja active Application Filing
- 2015-03-16 US US15/126,088 patent/US9747800B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007249757A (ja) * | 2006-03-17 | 2007-09-27 | Denso It Laboratory Inc | 警報装置 |
| JP2008210051A (ja) * | 2007-02-23 | 2008-09-11 | Mazda Motor Corp | 車両用運転支援システム |
| JP2009134704A (ja) * | 2007-11-05 | 2009-06-18 | Fujitsu Ten Ltd | 周辺監視装置、安全走行支援システム、及び車両 |
| JP2010238053A (ja) * | 2009-03-31 | 2010-10-21 | Hino Motors Ltd | 並走警報装置、車両およびプログラム |
| JP2013206183A (ja) * | 2012-03-28 | 2013-10-07 | Fujitsu Ltd | 事故予防装置、事故予防方法およびプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019197526A (ja) * | 2018-03-14 | 2019-11-14 | ホンダ リサーチ インスティテュート ヨーロッパ ゲーエムベーハーHonda Research Institute Europe GmbH | 自車両の操作を支援するための方法、他の交通参加者を支援するための方法、ならびに対応する支援システムおよび車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9747800B2 (en) | 2017-08-29 |
| JP6252304B2 (ja) | 2017-12-27 |
| JP2015191583A (ja) | 2015-11-02 |
| US20170076605A1 (en) | 2017-03-16 |
| DE112015001534T5 (de) | 2016-12-15 |
| CN106415693A (zh) | 2017-02-15 |
| DE112015001534B4 (de) | 2021-11-04 |
| CN106415693B (zh) | 2019-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6252304B2 (ja) | 車両用認知通知装置、車両用認知通知システム | |
| JP7043450B2 (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JP6354776B2 (ja) | 車両の制御装置 | |
| CN110371114B (zh) | 车辆控制装置、车辆控制方法及存储介质 | |
| US9896094B2 (en) | Collision avoidance control system and control method | |
| US10262629B2 (en) | Display device | |
| US20190071075A1 (en) | Vehicle control system, vehicle control method, and vehicle control program | |
| CN109987099B (zh) | 车辆控制系统、车辆控制方法及存储介质 | |
| US20200398849A1 (en) | Vehicle control system, vehicle control method, and program | |
| JP6976280B2 (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JPWO2018122966A1 (ja) | 車両制御システム、車両制御方法、および車両制御プログラム | |
| KR20180072139A (ko) | 차량 및 그 제어 방법 | |
| KR20210083462A (ko) | 운전자 보조 시스템, 그를 가지는 차량 및 그 제어 방법 | |
| US20190071071A1 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP7310524B2 (ja) | 遠隔自動運転車両、及び車両遠隔指示システム | |
| JP6827378B2 (ja) | 車両制御システム、車両制御方法、およびプログラム | |
| JP2020163900A (ja) | 車両制御装置、車両制御方法、及びプログラム | |
| JP2011118483A (ja) | 車載装置および認知支援システム | |
| CN112309157B (zh) | 图像显示装置 | |
| EP3835823B1 (en) | Information processing device, information processing method, computer program, information processing system, and moving body device | |
| US10640128B2 (en) | Vehicle control device, vehicle control method, and storage medium | |
| JP2018005468A (ja) | 車両の制御装置 | |
| KR102611337B1 (ko) | 차량의 ar 디스플레이 장치 및 그것의 동작방법 | |
| US20230120095A1 (en) | Obstacle information management device, obstacle information management method, and device for vehicle | |
| JP2015093568A (ja) | 車載装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15768590 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15126088 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112015001534 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15768590 Country of ref document: EP Kind code of ref document: A1 |