WO2015076109A1 - 電動ブレーキ装置 - Google Patents
電動ブレーキ装置 Download PDFInfo
- Publication number
- WO2015076109A1 WO2015076109A1 PCT/JP2014/079408 JP2014079408W WO2015076109A1 WO 2015076109 A1 WO2015076109 A1 WO 2015076109A1 JP 2014079408 W JP2014079408 W JP 2014079408W WO 2015076109 A1 WO2015076109 A1 WO 2015076109A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- abnormality detection
- electric
- brake device
- brake
- detection operation
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
- B60T17/22—Devices for monitoring or checking brake systems; Signal devices
- B60T17/221—Procedure or apparatus for checking or keeping in a correct functioning condition of brake systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/741—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on an ultimate actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
- B60T8/90—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means using a simulated speed signal to test speed responsive control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D55/00—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes
- F16D55/02—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members
- F16D55/22—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads
- F16D55/224—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members
- F16D55/225—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads
- F16D55/226—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads in which the common actuating member is moved axially, e.g. floating caliper disc brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
- F16D65/18—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/18—Electric or magnetic
- F16D2121/24—Electric or magnetic using motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2125/00—Components of actuators
- F16D2125/18—Mechanical mechanisms
- F16D2125/20—Mechanical mechanisms converting rotation to linear movement or vice versa
- F16D2125/34—Mechanical mechanisms converting rotation to linear movement or vice versa acting in the direction of the axis of rotation
- F16D2125/40—Screw-and-nut
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2125/00—Components of actuators
- F16D2125/18—Mechanical mechanisms
- F16D2125/44—Mechanical mechanisms transmitting rotation
- F16D2125/46—Rotating members in mutual engagement
- F16D2125/48—Rotating members in mutual engagement with parallel stationary axes, e.g. spur gears
Definitions
- This invention relates to an electric brake device, and relates to a technique for detecting an abnormality of the electric brake device at an early stage.
- the braking distance may increase undesirably as the braking force decreases. For this reason, it is necessary to promptly notify the driver of the occurrence of an abnormality in the electric brake device.
- Patent Document 1 discloses an electric brake device that can supply necessary power when an abnormality occurs in a power supply system.
- This electric brake device is based on the premise that a failure of a power source can be detected, and relates to a technique for switching a power supply path in accordance with a failure or a disconnected path.
- Patent Documents 2 and 3 disclose a technique for confirming the operation before the vehicle travels or when the parking brake is activated.
- Patent Document 4 discloses a technique for simultaneously detecting disconnection when an electric brake is operated.
- the function diagnosis of the electric brake device is performed for the purpose of detecting and grasping the brake abnormality by the vehicle integrated control device or the driver. It is necessary.
- an abnormality can be detected relatively easily for a power failure or the like. Further, complete disconnection of the harness, separation of the connector and the like, damage due to overcurrent, and the like are easy to detect when the abnormality occurs.
- the electric brake device operates due to load or aging deterioration due to repeated vibration or impact. It can also occur in situations where it is not.
- an abnormality since it is difficult to detect an abnormality in a non-operating state where the electric brake device is not operating, there is a possibility that an abnormality may be detected for the first time when a brake request is generated from the driver.
- the abnormality cannot be detected without operating the electric brake, for example, the abnormality will occur in the electric brake device at the start of braking, as the condition of traveling without using the brake for a long time, such as driving on a highway, continues. There is a risk that
- An object of the present invention is to provide an electric brake device that can detect the presence or absence of abnormality of the electric brake device at an early stage when the brake operating means is not operated while the vehicle is running.
- the electric brake device includes a brake rotor 6, a pressing member 7, an electric actuator 2 that presses the pressing member 7 against the brake rotor 6, and a control device 9 that controls the electric actuator 2.
- An electric brake device provided, The control device 9 Basic control means 36a for operating the electric actuator 2 in response to the operation of the brake operation means 40 by the driver and pressing the pressing member 7 against the brake rotor 6 to give a braking force;
- An abnormality detection operation control means 36b for operating the electric actuator 2 according to a set condition while the vehicle is running and the brake operation means 40 is not operated;
- the electric actuator 2 is operated by the abnormality detection operation control means 36b, a measured value of a predetermined item for the vehicle is acquired, and the measured value is compared with an estimated value or a set value to determine the electric brake.
- an abnormality detection unit 37 that detects whether the apparatus is abnormal.
- the “setting condition” is, for example, a condition for operating the electric actuator 2 so as to provide a braking force that generates a deceleration of a certain ratio (for example, 10%) or less with respect to the deceleration of the vehicle.
- the “measured value of a predetermined item for the vehicle” is, for example, an actual pressing force of the pressing member 7 when the electric actuator 2 is operated.
- the “estimated value or set value” is a pressing force of the pressing member 7 estimated from, for example, a rotation angle of the electric actuator 2, a generated torque, or the like when the electric actuator 2 is operated.
- the abnormality detecting unit 37 detects, for example, the actual pressing force of the pressing member 7 and compares it with the estimated pressing force when the electric actuator 2 is operated by the abnormality detection operation control unit 36b. Then, the presence or absence of abnormality of the electric brake device is detected from the comparison result.
- the control device 9 further detects an abnormality for operating the electric actuator 2 with respect to the abnormality detection operation control unit 36b when the vehicle operation is continued without operating the brake operation unit 40 for a certain period of time.
- An abnormality detection operation timer 38 for giving an instruction to execute an operation at a predetermined time;
- the abnormality detection operation control means 36b may operate the electric actuator 2 based on a command from the abnormality detection operation timer 38.
- the abnormality detection operation timer 38 receives information related to the driving state of the electric brake device from the rotation angle, generated torque, etc. of the electric actuator 2, and measures the time from the last use of the electric brake device. Also good.
- the abnormality detection operation timer 38 may generate an abnormality detection operation trigger when the measurement time exceeds a certain time.
- the abnormality detection operation control means 36b executes an abnormality detection operation for operating the electric actuator 2. As described above, since the operation for detecting an abnormality can be automatically executed without requiring an operation by the operator, the operation burden on the operator can be reduced.
- the control device 9 further instructs the abnormality detection operation control means 36b to execute an abnormality detection operation for operating the electric actuator 2 in response to an input from the input operation means by the operator.
- the abnormality detection operation can be executed at an arbitrary timing by the operator.
- the command given to the abnormality detection operation command input unit 39 may be generated by the external connection device 35 connected to the outside of the control device 9.
- the externally connected device is, for example, a vehicle integrated control device 35 that is a higher-level control means of the control device 9.
- the abnormality detection unit 37 detects whether the electric brake device is abnormal. May be. According to this, the presence or absence of abnormality of the electric brake device can be quickly detected at a stage before the pressing member 7 is brought into contact with the brake rotor 6.
- the electric actuator 2 When the pressing member 7 is not in contact with the brake rotor 6 and no abnormality is detected, the electric actuator 2 is operated by the abnormality detecting operation control means 36b, and the pressing member 7 is lightly applied to the brake rotor 6. In the contacted state, the abnormality detecting unit 37 may detect whether the electric brake device is abnormal. Even when the abnormality of the electric brake device is not detected in the non-contact state of the pressing member 7, the electric brake device is further used to detect the abnormality of the electric brake device in a state where the pressing member 7 is lightly contacted. It becomes possible to improve the detection accuracy of the presence or absence of abnormality.
- the abnormality detection unit 37 applies the voltage applied to the electric actuator 2, And determining whether the difference between the correlation value indicating at least two or more of the current and the rotation angle of the electric actuator 2 and the set comparison value is within an allowable range, The normal operation of the electric brake device may be confirmed.
- the “set comparison value” is determined by, for example, testing or simulation.
- the abnormality detection unit 37 determines that a difference between a correlation value indicating at least two correlations among the applied voltage, current, and rotation angle and a set comparison value is within an allowable range. If it is determined that the electric actuator 2 is within the range, it can be confirmed that the electric actuator 2 is operating as instructed.
- a brake force detection unit 44 that detects a brake force when the pressing member 7 is pressed against the brake rotor 6 is provided, While the pressing member 7 is brought into light contact with the brake rotor 6 by the abnormality detection operation control unit 36b, the abnormality detection unit 37 applies the voltage applied to the electric actuator 2, the electric actuator 2 The braking force estimated from at least one of the current and the rotation angle is compared with the braking force detected by the braking force detection unit 44, and the difference between these braking forces is within a set allowable range. Whether or not the electric brake device is operating normally may be confirmed.
- the degree of the “light contact” is, for example, such that the output change of the pressure detection sensor provided in the electric brake device can be clearly determined not to be caused by noise but by pressure.
- the electric braking device Detect that it is operating normally when the abnormality detection unit 37 determines that the difference between the estimated braking force and the braking force detected by the braking force detection unit 44 is within the set allowable range, the electric braking device Detect that it is operating normally.
- abnormality detection unit 37 When an abnormality of the electric brake device is detected by the abnormality detection unit 37, information on the occurrence of abnormality is given to one or both of an external device and a driver communicating with the control device 9.
- An abnormality occurrence information notifying means 34 for notifying may be provided.
- the abnormality occurrence information notification unit 34 is a display unit such as an in-vehicle display device provided on a console panel of the vehicle, for example. According to this, the driver can recognize information on the occurrence of abnormality at an early stage, and can appropriately deal with it.
- the abnormality detection operation control means 36b may make the pressing member 7 lightly contact the brake rotor 6. Generally, when the pressing member 7 is brought into light contact with the brake rotor 6, a slight deceleration is generated, which makes the vehicle occupant feel uncomfortable.
- the timing is the timing at which deceleration occurs due to deceleration due to running resistance or deceleration due to engine braking or equivalent regenerative braking.
- the pressing member 7 is brought into light contact with the brake rotor 6, so that the vehicle occupant feels special discomfort due to the abnormality detection operation. Difficult to remember.
- the braking force due to the light contact may be a braking force that generates a deceleration of a certain ratio or less with respect to the deceleration due to the running resistance of the vehicle.
- the traveling speed of the vehicle is high, the traveling resistance is large, and the passenger is less likely to feel uncomfortable. Therefore, by setting the braking force due to the light contact as a braking force that generates a deceleration of a certain ratio (for example, 10%) or less with respect to the deceleration due to the running resistance, the vehicle occupant can perform the abnormality detection operation. Difficulty remembering.
- the light contact is performed when an acceleration of a certain level or more is generated in the vehicle, and the braking force by the light contact is less than a certain rate of the acceleration. It may be a braking force that generates a deceleration of.
- the accelerator is stepped on and operated to accelerate, the light contact operation of the pressing member 7 is performed so that a deceleration that is extremely smaller (for example, about 1%) than the acceleration force is generated. This makes it difficult for the passengers of the vehicle to feel uncomfortable due to the abnormality detection operation.
- the detection result of the detection mechanism is corrected, and the next and subsequent braking is performed.
- the control accuracy at the time may be improved.
- the characteristics of the detection mechanism may change depending on the temperature, and apparently the relationship between the rotation angle of the electric actuator 2 and the actually generated pressing force or braking force changes. Therefore, if the relationship is broken within the accuracy range guaranteed by the detection mechanism, the detection result of the detection mechanism is corrected based on the predicted value and the detected braking force.
- the control accuracy can be improved.
- the electric brake device according to this embodiment is a disc brake type as an example, but is not limited to the disc brake type, and may be a drum brake type. As shown in FIG. 1, the electric brake device includes a brake mechanism Bk and a control device 9.
- the brake mechanism Bk includes a housing 1, an electric motor 2 that is an electric actuator, a speed reduction mechanism 3 that decelerates the rotation of the electric motor 2, a linear motion mechanism 4, a lock mechanism 5, a brake rotor 6, and a pressing member. And a brake pad 7.
- a base plate 8 extending radially outward is provided at the open end of the housing 1, and the electric motor 2 is supported on the base plate 8.
- a linear motion mechanism 4 that applies a braking force to the brake rotor 6, in this example, the disk rotor, by the output of the electric motor 2.
- the opening end of the housing 1 and the outer surface of the base plate 8 are covered with a cover 10.
- the linear motion mechanism 4 is a mechanism that converts the rotational motion output by the speed reduction mechanism 3 into a linear motion and causes the brake pad 7 to abut or separate from the brake rotor 6.
- the linear motion mechanism 4 includes a slide member 11, a bearing member 12, an annular thrust plate 13, a thrust bearing 14, rolling bearings 15 and 15, a rotating shaft 16, a carrier 17, and sliding bearings 18 and 19. And have.
- a cylindrical slide member 11 is supported on the inner peripheral surface of the housing 1 so as to be prevented from rotating and movable in the axial direction.
- a bearing member 12 is provided on one axial end side of the slide member 11 in the housing 1.
- the bearing member 12 has a flange portion extending radially outward and a boss portion.
- Rolling bearings 15 and 15 are fitted into the boss portions, and a rotary shaft 16 is fitted to the inner ring inner surface of each of the bearings 15 and 15. Therefore, the rotating shaft 16 is rotatably supported by the bearing member 12 via the bearings 15 and 15.
- a carrier 17 that can rotate around the rotation shaft 16 is provided on the inner periphery of the slide member 11.
- the carrier 17 includes disks 17a and 17b that are arranged to face each other in the axial direction.
- the disk 17b close to the bearing member 12 may be referred to as an inner disk 17b
- the disk 17a may be referred to as an outer disk 17a.
- a side surface facing the other disk 17b is provided with an interval adjusting member 17c protruding in the axial direction from the outer peripheral edge portion on this side surface.
- a plurality of the interval adjusting members 17 c are arranged at intervals in the circumferential direction.
- the discs 17a and 17b are integrally provided by the distance adjusting member 17c.
- the inner disk 17b is rotatably supported by a sliding bearing 18 fitted between the rotating shaft 16 and the inner disk 17b.
- a shaft insertion hole is formed at the center of the outer disk 17a, and a slide bearing 19 is fitted in the shaft insertion hole.
- the outer disk 17a is rotatably supported on the rotary shaft 16 by a slide bearing 19.
- a washer that receives a thrust load is fitted to the end of the rotating shaft 16, and a retaining ring for preventing the washer from coming off is provided.
- the carrier 17 is provided with a plurality of roller shafts 21 at intervals in the circumferential direction. Both end portions of each roller shaft 21 are supported across the disks 17a and 17b. That is, the discs 17a and 17b are formed with a plurality of shaft insertion holes each having a long hole, and both end portions of the roller shafts 21 are inserted into the shaft insertion holes, and the roller shafts 21 are supported so as to be movable in the radial direction.
- the An elastic ring 22 that urges the roller shafts 21 radially inward is stretched around the plurality of roller shafts 21.
- a planetary roller 20 is rotatably supported on each roller shaft 21, and each planetary roller 20 is interposed between the outer peripheral surface of the rotary shaft 16 and the inner peripheral surface of the slide member 11.
- Each planetary roller 20 is pressed against the outer peripheral surface of the rotating shaft 16 by the urging force of the elastic ring 22 spanned across the plurality of roller shafts 21.
- As the rotating shaft 16 rotates each planetary roller 20 that contacts the outer peripheral surface of the rotating shaft 16 rotates due to contact friction.
- On the outer peripheral surface of the planetary roller 20 a spiral groove that meshes with the spiral protrusion 11a of the slide member 11 is formed.
- a washer and a thrust bearing are interposed between the inner disk 17b of the carrier 17 and one axial end of the planetary roller 20.
- an annular thrust plate 13 and a thrust bearing 14 are provided between the inner disk 17 b and the bearing member 12.
- the speed reduction mechanism 3 is a mechanism that transmits the rotation of the electric motor 2 at a reduced speed to the output gear 23 fixed to the rotation shaft 16, and includes a plurality of gear trains.
- the speed reduction mechanism 3 is fixed to the end of the rotary shaft 16 by sequentially reducing the rotation of the input gear 24 attached to the rotor shaft 2 a of the electric motor 2 by the gear trains 25, 26 and 27. Transmission to the output gear 23 is possible.
- the lock mechanism 5 will be described.
- the lock mechanism 5 is configured to be switchable between a locked state in which the braking force slack operation of the linear motion mechanism 4 is prevented and an allowed unlocked state.
- the deceleration mechanism 3 is provided with a lock mechanism 5.
- the lock mechanism 5 is a casing (not shown), a lock pin 29, an urging means (not shown) for urging the lock pin 29 to an unlocked state, and an actuator for switching and driving the lock pin 29. And a linear solenoid 30.
- the casing is supported by the base plate 8, and the base plate 8 is formed with pin holes that allow the lock pins 29 to advance and retreat.
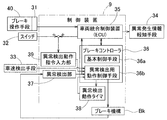
- FIG. 3 is a block diagram of a control system of the electric brake device.
- a vehicle equipped with the brake mechanism Bk (see FIG. 1) is provided with a control device 9, a sensor 31, a switch (input operation means) 32, a vehicle speed detection means 33, and an abnormality occurrence information notification means 34.
- the control device 9 includes a vehicle integrated control device 35, a brake controller 36, an abnormality detection unit 37, an abnormality detection operation timer 38, and an abnormality detection operation command input unit 39.
- the vehicle integrated control device 35 is an electric control unit (ECU) that performs overall control of the entire automobile, and is an upper control means that gives a command to the brake controller 36 and the like.
- the vehicle integrated control device 35 includes a computer, a program executed by the computer, and an electronic circuit.
- the vehicle integrated control device 35 generates a deceleration command according to the output of the sensor 31 that changes according to the amount of operation of the brake operation means 40 by the driver, and outputs this deceleration command to the brake controller 36.
- the brake controller 36 includes basic control means 36a and abnormality detection operation control means 36b.
- the basic control means 36a in the brake controller 36 gives a braking command to each brake mechanism Bk (see FIG. 1) in accordance with the deceleration command from the vehicle integrated control device 35.
- the basic control unit 36a operates the electric motor 2 of each brake mechanism Bk in response to the operation of the brake operation unit 40 by the driver, and applies the braking force by pressing the brake pad 7 against the brake rotor 6 (see FIG. 1). .
- the abnormality detection operation control means 36b operates the electric motor 2 of each brake mechanism Bk in accordance with the set condition separately from the brake operation by the driver, that is, when the vehicle is running and the brake operation means 40 is not operated. . Whether or not the vehicle is running is determined, for example, if the vehicle speed detection means 33 detects a vehicle speed of a certain vehicle speed (for example, a vehicle speed of 40 km / h) or more, the abnormality detection operation control means 36b is running the vehicle. Judge.
- the abnormality detection operation control means 36b may be provided as a partial function of the basic control means 36a.
- FIG. 4 is a block diagram showing the abnormality detecting brake control unit 9a and other elements of the control device 9 of the electric brake device.
- the abnormality detection brake control unit 9 a includes an abnormality detection operation control unit 36 b, an abnormality detection unit 37, an abnormality detection operation timer 38, and an abnormality detection operation command input unit 39 in the control device 9.
- the abnormality detection operation control means 36b includes an abnormality detection operation generation unit 41 and an electric brake drive unit 42.
- the abnormality detection operation generation unit 41 gives an abnormality detection operation command for increasing or decreasing the gap between the brake rotor 6 and the brake pad 7 to the electric brake drive unit 42.
- the electric brake drive unit 42 rotates the electric motor 2 in accordance with the abnormality detection operation command.
- the abnormality detection unit 37 acquires a measurement value of a predetermined item about the vehicle when the electric motor 2 is rotated by the abnormality detection operation control unit 36b, and compares the measurement value with an estimated value or a set value. The presence or absence of abnormality in the electric brake device is detected.
- the “measured value of a predetermined item about the vehicle” is, for example, an actual pressing force of the brake pad 7 when the electric motor 2 is rotated.
- the “estimated value or set value” is the pressing force of the brake pad 7 estimated from, for example, the motor rotation angle and the generated torque calculated from the motor current when the electric motor 2 is rotated.
- the abnormality detection unit 37 applies the voltage applied to the electric motor 2. Determining whether or not a difference between a correlation value indicating at least two of the motor current and the motor rotation angle and a set comparison value is within an allowable range. Check the normal operation of the device. When the abnormality detection unit 37 determines that the difference is within the allowable range, the abnormality detection unit 37 detects that the electric brake device is operating normally.
- the “set comparison value” is determined by, for example, testing or simulation.
- the abnormality detection operation timer 38 receives the brake drive state from the electric brake drive unit 42.
- This brake driving state is information obtained from the actual pressing force of the brake pad 7 described above, the motor rotation angle, the generated torque, and the like.
- the abnormality detection operation timer 38 generates an abnormality detection operation trigger when the vehicle travel is continued without operating the brake operation means 40 (FIG. 3) for a predetermined time based on the brake driving state.
- the abnormality detection operation trigger is detected by the abnormality detection operation generation unit 41.
- the abnormality detection operation trigger is also generated by the abnormality detection operation command input unit 39 in response to the operation of the switch 32 by the operator.
- the abnormality detection operation trigger generated by the input unit 39 is also detected by the abnormality detection operation generation unit 41.
- the abnormality occurrence information notification means 34 is a display means such as an in-vehicle display device provided on the console panel of the vehicle, for example.
- the vehicle integrated control device 35 receives the information on the occurrence of the abnormality of the electric brake device output from the abnormality detection unit 37 and causes the display means to perform a display notifying the abnormality.
- the driver can recognize the occurrence information of the abnormality at an early stage, and appropriately take measures such as retreating the vehicle to a place where it does not interfere with traffic of other vehicles and stopping the vehicle.
- FIG. 5 is a flowchart for detecting the presence or absence of an abnormality in the electric brake device
- FIG. 6 is a flowchart for detecting an abnormality in the electric brake device. This will be described with reference to FIG. 3 together with FIG. This example explains the simplest abnormality detection flow for the sake of simplicity.
- the abnormality detection operation timer 38 receives the brake drive state from the electric brake drive unit 42, and measures the time from the last use of the operation by the brake operation means. When a certain time has elapsed, an abnormality detection operation trigger is generated.
- the predetermined time is, for example, 10 minutes when the brake is not used by the brake operating means, or 10 minutes when the brake is not used by the brake operating means and the vehicle travels at a certain vehicle speed such as a vehicle speed of 40 km / h.
- the abnormality detection operation trigger is also generated by a driver switch input input from the abnormality detection operation command input unit 39 or a command from the vehicle integrated control device 35.
- step S1 When the abnormality detection operation generation unit 41 detects an abnormality detection operation trigger (Yes in step S1), the abnormality detection operation generation unit 41 sends a command to the electric brake drive unit 42 to rotate the electric motor 2 to reduce the slight gap. (Step S2). At this stage, the brake pad 7 is not in contact with the brake rotor 6. At this time, the abnormality detection unit 37 reads the motor rotation angle of the electric motor 2. Based on the change in the motor rotation angle at this time, the abnormality detection unit 37 confirms that the electric motor 2 is rotating as instructed (yes in step S3), and proceeds to step S4. In step S1, if the abnormality detection operation generation unit 41 does not detect the abnormality detection operation trigger (no in step S1), the process returns to step S1 and waits until the generation of the abnormality detection operation trigger is detected.
- step S ⁇ b> 4 the abnormality detection operation generation unit 41 further gives a command to rotate the electric motor 2 or generate torque to the electric brake drive unit 42, generates a pressing force on the brake pad 7, and causes the brake pad 7 to move to the brake rotor 6. Lightly touch.
- step S2 the electric motor 2 may be rotated to the extent that a pressing force is generated.
- the abnormality detection unit 37 compares the pressing force estimated from the motor rotation angle and the generated torque when the pressing force is generated with the actually generated pressing force (step S5). If normal (yes in step S5), the process returns to step S1 and waits until the next occurrence of an abnormality detection operation trigger is detected.
- step S3 when the abnormality detection unit 37 determines that the electric motor 2 does not rotate as commanded (no in step S3), the process proceeds to an abnormality detection process (step S6). Similarly, when the abnormality detection unit 37 determines in step S5 that no pressing force is generated as instructed (no in step S5), the process proceeds to abnormality detection processing (step S6). At this time, the abnormality detection unit 37 gives an abnormality detection signal to the abnormality detection operation generation unit 41, so that the abnormality detection operation generation unit 41 generates a command for processing at the time of abnormality detection.
- the abnormality detection operation generation unit 41 gives a command to the electric brake drive unit 42 to rotate the electric motor 2 in the reverse direction to enlarge the slight gap once (step S7).
- the abnormality detection unit 37 confirms that the electric motor 2 is rotating as instructed based on the motor rotation angle at this time (yes in step S8), the abnormality detection operation generation unit 41 turns the electric motor 2 off.
- a command to rotate in the forward direction to reduce the slight gap is given to the electric brake drive unit 42 to rotate the electric motor 2 (step S9).
- the abnormality detection operation generation unit 41 further gives a command to rotate the electric motor 2 or generate torque to the electric brake drive unit 42 to generate a pressing force on the brake pad 7 so that the brake pad 7 is applied to the brake rotor 6.
- Light contact is made (step S10).
- the abnormality detection unit 37 compares the pressing force estimated from the motor rotation angle and the generated torque when the pressing force is generated with the actually generated pressing force (step S11). If it is normal (yes in step S11), it is determined that the previous abnormality determination is wrong (step S12), and the process returns to step S1 and waits until the occurrence of the abnormality detection operation trigger is detected.
- Step S8 when the abnormality detection unit 37 determines that the electric motor 2 does not rotate as commanded (No in Step S8), it can determine that the motor cannot be driven (Step S13). At this time, the electric motor 2 cannot be rotated, or the rotation of the electric motor 2 cannot be detected. For example, the electric motor 2 is stuck, the brake mechanism Bk is locked, an abnormality of a current drive element (not shown), the motor rotation angle is determined. If the motor rotation angle detection mechanism 43 to be detected is abnormal and the current cannot be normally flowed, there may be a current sensor abnormality or a motor coil short circuit.
- step S11 when the abnormality detection unit 37 determines that the pressing force is not generated as instructed (no in step S11), it can be determined that the pressing cannot be performed (step S14). At this time, the electric motor 2 rotates, but no pressing force is generated by the brake pad 7, and motor idling or caliper abnormality due to abnormality of the brake mechanism Bk can be considered.
- the vehicle integrated control device 35 receives the information on the occurrence of abnormality output from the abnormality detection unit 37 and causes the abnormality occurrence information notification unit 34 to display a notification indicating the abnormality (step) S15). After that, for example, a measure for an abnormality such as using a fail-safe mechanism or sharing the braking force is implemented (step S16). Thereafter, this process is terminated.
- the abnormality detection operation control unit 36b operates the electric motor 2 as described above when the vehicle is running and the brake operation unit 40 is not operated. At this time, if the abnormality detection unit 37 determines that the electric motor 2 does not rotate as instructed or no pressing force is generated as instructed, the abnormality of the electric brake device is detected.
- the presence or absence of an abnormality in the electric brake device can be detected at an early stage in a situation where the vehicle travels without using a brake for a long time, such as on an expressway.
- the driver can take appropriate measures such as retreating the vehicle to a place where it does not interfere with traffic of other vehicles and stopping the vehicle.
- the abnormality detection operation timer 38 generates an abnormality detection operation trigger, and the abnormality detection operation control means 36b detects the occurrence of the abnormality detection operation trigger and executes an abnormality detection operation for rotating the electric motor 2.
- the abnormality detection operation can be automatically executed without requiring any operation by the driver, and the operation burden on the driver can be reduced.
- the abnormality detection operation command input unit 39 may give a command to execute an abnormality detection operation for operating the electric motor 2 to the abnormality detection operation control unit 36b by a switch input by the driver. Thereby, the abnormality detection operation can be executed at an arbitrary timing by the driver.
- the motor rotation angle detection mechanism 43 is provided with a brake force detection unit 44 that detects a brake force when the brake pad 7 is pressed against the brake rotor 6.
- the abnormality detection unit 37 is at least one of the voltage applied to the electric motor 2, the motor current, and the motor rotation angle.
- the braking force estimated from the above and the braking force detected by the braking force detection unit 44 are compared, and it is determined whether or not the difference between these braking forces is within a set allowable range. Normal operation may be confirmed.
- the electric brake device is normally operated. Detect that it is working.
- the abnormality detection operation control means 36b may lightly contact the brake pad 7 with the brake rotor 6.
- the brake pad 7 is lightly contacted with the brake rotor 6, a slight deceleration is generated, and the vehicle occupant feels uncomfortable.
- the timing is the timing at which deceleration occurs due to deceleration due to running resistance or deceleration due to engine braking or equivalent regenerative braking. It is difficult for passengers to remember a special feeling of discomfort due to the overlapping abnormality detection operation.
- the braking force by the light contact may be a braking force that generates a deceleration of a certain ratio or less with respect to the deceleration due to the running resistance of the vehicle.
- a braking force that generates a deceleration of a certain ratio for example, 10%
- the vehicle occupant can perform the abnormality detection operation. Difficulty remembering.
- the light contact is performed when an acceleration of a certain level or more is generated in the vehicle, and the braking force due to the light contact is reduced to a certain rate or less of the acceleration. It may be a size that generates speed.
- the accelerator is stepped on and operated to accelerate, the light contact operation of the brake pad 7 is performed so that a deceleration that is extremely smaller (for example, about 1%) than the acceleration force is generated. This makes it difficult for the passengers of the vehicle to feel uncomfortable due to the abnormality detection operation.
- the series of abnormality detections described above may be performed simultaneously on, for example, four wheels of a vehicle after a predetermined time has elapsed since the last use of the electric brake device, or may be performed sequentially one by one. Alternatively, for example, one wheel may be implemented in 10 minutes and four wheels may be completed in 40 minutes.
- the method of detecting the pressing force is exemplified, but a mechanism for directly measuring the braking force generated in the tire, for example, a tire rotation axial force sensor, a mechanism for measuring the deceleration generated in the vehicle, for example, A vehicle acceleration sensor may be used.
- Electric motor (electric actuator) 6 ... Brake rotor 7 ... Brake pad (pressing member) 9 ...
- Control device 36a Basic control means 36b .
- Abnormality detection operation control means 37 ...
- Abnormality detection unit 40 ... Brake operation means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Regulating Braking Force (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Braking Arrangements (AREA)
- Braking Systems And Boosters (AREA)
Abstract
車両走行中でブレーキ操作手段が操作されていないときに、電動ブレーキ装置の異常の有無を早期に検出することができる電動ブレーキ装置を提供する。この電動ブレーキ装置の制御装置(9)は、運転者によるブレーキ操作手段(40)の操作に応答して電動モータ(2)を動作させて制動力を与える基本制御手段(36a)と、車両走行中でかつブレーキ操作手段(40)が操作されていない間に、設定条件に従って電動モータ(2)を動作させる異常検出用動作制御手段(36b)とを備える。さらに異常検出用動作制御手段(36b)により電動モータを動作させたときに車両についての定められた事項の測定値を取得し、この測定値を推定値または設定値と比較して電動ブレーキ装置の異常有無を検出する異常検出部(37)を備える。
Description
本出願は、2013年11月19日出願の特願2013-238690の優先権を主張するものであり、それらの全体を参照により本願の一部をなすものとして引用する。
この発明は、電動ブレーキ装置に関し、この電動ブレーキ装置の異常を早期に発見する技術に関する。
電動ブレーキを搭載した車両で、例えば、ある1つの車輪の電動ブレーキ装置に異常が発生した場合、ブレーキ力の低下に伴って、制動距離が不所望に増加するおそれがある。このため、電動ブレーキ装置の異常の発生を速やかに運転者に通知する必要がある。
一方、特許文献1には、電源系統の異常発生時に必要電力を供給できる電動ブレーキ装置が開示されている。この電動ブレーキ装置は、電源の故障を検出できることが前提となっており、故障もしくは断線した経路に応じて電源供給経路を切り替える技術に関する。
車両走行前や、パーキングブレーキ作動時に動作確認を行う技術が開示された文献もある(特許文献2,3)。また、その他電動ブレーキ作動時に断線検出を同時に実施する技術が開示された文献もある(特許文献4)。
電動アクチュエータの動作によって、ブレーキロータにブレーキ押圧部材を押し付ける電動ブレーキ装置においては、例えば、車両統合制御装置や運転者がブレーキ異常を検出・把握することを目的として、電動ブレーキ装置の機能診断を行うことが必要である。
この際、例えば、電源故障等については、比較的容易に異常検出が可能である。また、ハーネスの完全断線やコネクタ等の離反、過電流による損傷等については、当該の異常が発生した時点での検出が容易である。
しかしながら、ハーネスや配電経路の部分的な断線、各種センサの異常、電動アクチュエータであるモータのロータ磁石の脱落、等については、振動または衝撃の繰り返しによる負荷や経年劣化により、電動ブレーキ装置が動作していない状況においても発生し得る。しかし、電動ブレーキ装置が動作していない非動作状態における異常検知は困難であるため、運転者からブレーキ要求が発生した時点で、初めて異常を検知するおそれがある。
電動ブレーキを作動させなければ異常を検出できないと、例えば、高速道路走行中のような、長時間ブレーキを用いずに走行する状況が継続するほど、制動開始時に電動ブレーキ装置に異常が発生している可能性が高くなるおそれがある。
この発明の目的は、車両走行中でブレーキ操作手段が操作されていないときに、電動ブレーキ装置の異常の有無を早期に検出することができる電動ブレーキ装置を提供することである。
以下、便宜上理解を容易にするために、実施形態の符号を参照して説明する。
この発明の一構成に係る電動ブレーキ装置は、ブレーキロータ6と、押圧部材7と、前記ブレーキロータ6に前記押圧部材7を押し付ける電動アクチュエータ2と、この電動アクチュエータ2を制御する制御装置9とを備えた電動ブレーキ装置であって、
前記制御装置9は、
運転者によるブレーキ操作手段40の操作に応答して前記電動アクチュエータ2を動作させ、前記ブレーキロータ6に前記押圧部材7を押し付けて制動力を与える基本制御手段36aと、
車両走行中でかつ前記ブレーキ操作手段40が操作されていない間に、設定条件に従って前記電動アクチュエータ2を動作させる異常検出用動作制御手段36bと、
この異常検出用動作制御手段36bにより前記電動アクチュエータ2を動作させたときに前記車両についての定められた事項の測定値を取得し、この測定値を推定値または設定値と比較して前記電動ブレーキ装置の異常有無を検出する異常検出部37とを備える。
前記制御装置9は、
運転者によるブレーキ操作手段40の操作に応答して前記電動アクチュエータ2を動作させ、前記ブレーキロータ6に前記押圧部材7を押し付けて制動力を与える基本制御手段36aと、
車両走行中でかつ前記ブレーキ操作手段40が操作されていない間に、設定条件に従って前記電動アクチュエータ2を動作させる異常検出用動作制御手段36bと、
この異常検出用動作制御手段36bにより前記電動アクチュエータ2を動作させたときに前記車両についての定められた事項の測定値を取得し、この測定値を推定値または設定値と比較して前記電動ブレーキ装置の異常有無を検出する異常検出部37とを備える。
前記「設定条件」は、例えば、車両の減速度に対して、一定の割合(例えば10%)以下の減速度を発生するブレーキ力となるように電動アクチュエータ2を動作させる条件である。
前記「車両についての定められた事項の測定値」は、前記電動アクチュエータ2を動作させたときの、例えば、押圧部材7の実際の押圧力である。
前記「推定値または設定値」は、前記電動アクチュエータ2を動作させたときの、例えば、前記電動アクチュエータ2の回転角、発生トルク等から推定される押圧部材7の押圧力である。
この構成によると、異常検出部37は、異常検出用動作制御手段36bにより電動アクチュエータ2を動作させたときに、例えば、押圧部材7の実際の押圧力を検出し、推定される押圧力と比較し、比較結果から電動ブレーキ装置の異常有無を検出する。
このように車両走行中において、運転者によりブレーキ操作手段40が操作されていないときに、電動ブレーキ装置の異常の有無を検出することができる。そのため、例えば、高速道路走行中のような、長時間ブレーキを用いずに走行する状況下において、電動ブレーキ装置の異常の有無を早期に検出することができる。電動ブレーキ装置の異常を検出した場合、運転者は、例えば、車両を他の車両の交通の妨げにならない場所に退避して停車する等、適切に対処することができる。
前記制御装置9は、さらに、前記ブレーキ操作手段40を一定時間操作しない車両走行が継続している場合に、前記異常検出用動作制御手段36bに対して、前記電動アクチュエータ2を動作させる異常検出用動作を実行させる指令を、定められた時間毎に与える異常検出動作タイマ38を有し、
前記異常検出用動作制御手段36bは、前記異常検出動作タイマ38の指令に基づき、前記電動アクチュエータ2を動作させても良い。
前記異常検出用動作制御手段36bは、前記異常検出動作タイマ38の指令に基づき、前記電動アクチュエータ2を動作させても良い。
これによれば、異常検出動作タイマ38は、電動アクチュエータ2の回転角、発生トルク等から電動ブレーキ装置の駆動状態に関する情報を受け取り、電動ブレーキ装置を最後に使用した時点からの時間を計測してもよい。異常検出動作タイマ38は、計測時間が一定時間を超えた場合に、異常検出動作トリガを生成してもよい。異常検出用動作制御手段36bは、この異常検出動作トリガの発生を検出すると、電動アクチュエータ2を動作させる異常検出用動作を実行する。このように操作者による操作を必要とせずに異常検出用動作を自動で実行することができるため、操作者の操作負担を軽減することができる。
前記制御装置9は、さらに、操作者による入力操作手段からの入力に応答して、前記異常検出用動作制御手段36bに対して、前記電動アクチュエータ2を動作させる異常検出用動作を実行させる指令を与える異常検出動作指令入力部39を有しても良い。これにより、操作者による任意のタイミングで異常検出用動作を実行することができる。
前記異常検出動作指令入力部39に与えられる指令が、前記制御装置9の外部に接続された外部接続機器35により生成されても良い。前記外部接続機器は、例えば、前記制御装置9の上位制御手段である車両統合制御装置35である。
前記異常検出用動作制御手段36bにより前記電動アクチュエータ2を動作させて、前記押圧部材7が前記ブレーキロータ6に非接触状態のとき、前記異常検出部37により前記電動ブレーキ装置の異常有無を検出しても良い。これによれば、押圧部材7を前記ブレーキロータ6に接触させる前段階で迅速に電動ブレーキ装置の異常有無を検出し得る。
前記押圧部材7が前記ブレーキロータ6に非接触状態で異常が検出されなかったとき、前記異常検出用動作制御手段36bにより前記電動アクチュエータ2を動作させ、前記押圧部材7を前記ブレーキロータ6に軽接触させた状態で、前記異常検出部37により前記電動ブレーキ装置の異常有無を検出しても良い。押圧部材7の非接触状態で電動ブレーキ装置の異常が検出されなかった場合であっても、前記押圧部材7を軽接触させた状態でさらに電動ブレーキ装置の異常有無を検出する場合、電動ブレーキ装置の異常有無の検出精度を高めることが可能となる。
前記異常検出用動作制御手段36bにより、前記ブレーキロータ6と前記押圧部材7との間隔を増加および/または減少させている間に、前記異常検出部37は、前記電動アクチュエータ2への印加電圧、ならびに前記電動アクチュエータ2の電流および回転角のうち、少なくとも二つ以上の相関関係を示す相関関係値と、設定された比較用の値との差が許容範囲内であるか否かを判断し、前記電動ブレーキ装置の正常動作を確認しても良い。
前記「設定された比較用の値」は、例えば、試験やシミュレーション等により定められる。
前記「設定された比較用の値」は、例えば、試験やシミュレーション等により定められる。
これによれば、異常検出部37は、前記印加電圧、電流、および回転角のうち、少なくとも二つ以上の相関関係を示す相関関係値と、設定された比較用の値との差が許容範囲内であると判断すると、電動アクチュエータ2が指令通りに動作していることを確認できる。
さらに、前記ブレーキロータ6に前記押圧部材7を押し付けたときのブレーキ力を検出するブレーキ力検出部44を備え、
前記異常検出用動作制御手段36bによって、前記押圧部材7が前記ブレーキロータ6に軽接触させられている間に、前記異常検出部37は、前記電動アクチュエータ2への印加電圧、前記電動アクチュエータ2の電流、および回転角のうち少なくとも一つ以上から推定されるブレーキ力と、前記ブレーキ力検出部44で検出されるブレーキ力とを比較し、これらブレーキ力の差が設定された許容範囲内であるか否かを判断し、前記電動ブレーキ装置の正常動作を確認しても良い。
前記異常検出用動作制御手段36bによって、前記押圧部材7が前記ブレーキロータ6に軽接触させられている間に、前記異常検出部37は、前記電動アクチュエータ2への印加電圧、前記電動アクチュエータ2の電流、および回転角のうち少なくとも一つ以上から推定されるブレーキ力と、前記ブレーキ力検出部44で検出されるブレーキ力とを比較し、これらブレーキ力の差が設定された許容範囲内であるか否かを判断し、前記電動ブレーキ装置の正常動作を確認しても良い。
前記「軽接触」の程度は、例えば、電動ブレーキ装置に設けられた押圧検出センサの出力変化が、ノイズではなく押圧によるものであると明確に判断できる程度とする。
これによれば、異常検出部37は、前記推定されるブレーキ力と、ブレーキ力検出部44で検出されるブレーキ力との差が設定された許容範囲内であると判断すると、電動ブレーキ装置が正常に動作している旨検出する。
前記異常検出部37にて前記電動ブレーキ装置の異常が検出された場合、前記制御装置9と通信を行っている外部の機器および運転者のいずれか一方または両方に対して、異常発生の情報を報知する異常発生情報報知手段34を設けても良い。異常発生情報報知手段34は、例えば、車両のコンソールパネル等に設けられた車内表示装置等の表示手段である。
これによれば、運転者は、異常発生の情報を早期に認識でき、適切に対処することができる。
これによれば、運転者は、異常発生の情報を早期に認識でき、適切に対処することができる。
運転者による前記車両のアクセルの操作を解除し前記車両が減速に転じたときに、前記異常検出用動作制御手段36bが、前記押圧部材7を前記ブレーキロータ6に軽接触させても良い。一般に、押圧部材7をブレーキロータ6に軽接触させると、微小ながら減速度が発生してしまい、車両の搭乗者にとって違和感を覚える。
これに対して、前記車両のアクセルの操作を解除したタイミングで軽接触させるのであれば、前記タイミングは、走行抵抗による減速や、エンジンブレーキもしくはそれに相当する回生制動による減速により減速度が発生するタイミングと重なり、搭乗者は異常検出用動作による特別な違和感を覚えにくい。
この構成によると、前記車両のアクセルの操作を解除し前記車両が減速に転じたときに、押圧部材7をブレーキロータ6に軽接触させるため、車両の搭乗者が異常検出用動作による特別な違和感を覚えにくい。
この構成によると、前記車両のアクセルの操作を解除し前記車両が減速に転じたときに、押圧部材7をブレーキロータ6に軽接触させるため、車両の搭乗者が異常検出用動作による特別な違和感を覚えにくい。
前記軽接触によるブレーキ力は、前記車両の走行抵抗による減速度に対して、一定の割合以下の減速度を発生するブレーキ力であっても良い。例えば、車両の走行速度が高い場合は、走行抵抗が大きく、搭乗者は比較的違和感を覚えにくくなる。よって、軽接触によるブレーキ力を、走行抵抗による減速度に対して、一定の割合(例えば10%)以下の減速度を発生するブレーキ力とすることで、車両の搭乗者が異常検出用動作による違和感を覚えにくくなる。
前記電動ブレーキ装置の異常検出用動作要求が発生した状態において、前記車両に一定以上の加速度が発生した際に前記軽接触を実施し、この軽接触によるブレーキ力は、前記加速度の一定の割合以下の減速度を発生するブレーキ力であっても良い。この場合、例えば、アクセルが強く踏まれて操作されて加速する場合に、この加速力より極めて小さい(例えば1%程度)減速度が発生するように、押圧部材7の軽接触動作を実施する。これにより、車両の搭乗者は異常検出用動作による違和感を覚えにくくなる。
前記軽接触の際に、検出されたブレーキ力がそれぞれの検出機構の保証する精度の範囲内で予測値と偏差を持つ場合、前記検出機構の検出結果に補正を与えて、次回以降の制動実施時の制御精度を向上させても良い。例えば、検出機構が温度によって特性が変化する可能性があり、見かけ上は、電動アクチュエータ2の回転角と実際に発生する押圧力やブレーキ力の関係が変化する。そこで、検出機構の保証する精度の範囲内で関係が崩れているならば、予測値と検出されたブレーキ力を元に、検出機構の検出結果に補正を与えることで、次回以降の制動実施時の制御精度を向上させ得る。
請求の範囲および/または明細書および/または図面に開示された少なくとも2つの構成のどのような組合せも、本発明に含まれる。特に、請求の範囲の各請求項の2つ以上のどのような組合せも、本発明に含まれる。
この発明は、添付の図面を参考にした以下の好適な実施形態の説明から、より明瞭に理解されるであろう。しかしながら、実施形態および図面は単なる図示および説明のためのものであり、この発明の範囲を定めるために利用されるべきものではない。この発明の範囲は添付の請求の範囲によって定まる。添付図面において、複数の図面における同一の符号は、同一または相当する部分を示す。
この発明の第1および第2の実施形態に係る電動ブレーキ装置の断面図である。
図1の電動ブレーキ装置の減速機構の拡大断面図である。
図1の電動ブレーキ装置の制御系のブロック図である。
図1の電動ブレーキ装置の制御装置の要部を示すブロック図である。
図1の電動ブレーキ装置の異常有無を検出するフローチャートである。
図1の電動ブレーキ装置の異常検出時のフローチャートである。
この発明の第1の実施形態に係る電動ブレーキ装置を図1ないし図6と共に説明する。この実施形態に係る電動ブレーキ装置は、一例としてディスクブレーキタイプであるが、ディスクブレーキタイプだけに限定されるものではなくドラムブレーキタイプであっても良い。図1に示すように、この電動ブレーキ装置は、ブレーキ機構Bkと、制御装置9とを有する。
先ず、ブレーキ機構Bkについて説明する。
ブレーキ機構Bkは、ハウジング1と、電動アクチュエータである電動モータ2と、この電動モータ2の回転を減速する減速機構3と、直動機構4と、ロック機構5と、ブレーキロータ6と、押圧部材であるブレーキパッド7とを有する。ハウジング1の開口端に、径方向外方に延びるベースプレート8が設けられ、このベースプレート8に電動モータ2が支持されている。ハウジング1内には、電動モータ2の出力によりブレーキロータ6、この例ではディスクロータに対して制動力を負荷する直動機構4が組み込まれている。ハウジング1の開口端およびベースプレート8の外側面は、カバー10によって覆われている。
ブレーキ機構Bkは、ハウジング1と、電動アクチュエータである電動モータ2と、この電動モータ2の回転を減速する減速機構3と、直動機構4と、ロック機構5と、ブレーキロータ6と、押圧部材であるブレーキパッド7とを有する。ハウジング1の開口端に、径方向外方に延びるベースプレート8が設けられ、このベースプレート8に電動モータ2が支持されている。ハウジング1内には、電動モータ2の出力によりブレーキロータ6、この例ではディスクロータに対して制動力を負荷する直動機構4が組み込まれている。ハウジング1の開口端およびベースプレート8の外側面は、カバー10によって覆われている。
直動機構4について説明する。
直動機構4は、減速機構3で出力される回転運動を直線運動に変換して、ブレーキロータ6に対してブレーキパッド7を当接または離隔させる機構である。この直動機構4は、スライド部材11と、軸受部材12と、環状のスラスト板13と、スラスト軸受14と、転がり軸受15,15と、回転軸16と、キャリア17と、すべり軸受18,19とを有する。ハウジング1の内周面に、円筒状のスライド部材11が、回り止めされ且つ軸方向に移動自在に支持されている。スライド部材11の内周面には、径方向内方に所定距離突出して螺旋状に形成された螺旋突起11aが設けられている。この螺旋突起11aに、後述する複数の遊星ローラ20が噛合している。
直動機構4は、減速機構3で出力される回転運動を直線運動に変換して、ブレーキロータ6に対してブレーキパッド7を当接または離隔させる機構である。この直動機構4は、スライド部材11と、軸受部材12と、環状のスラスト板13と、スラスト軸受14と、転がり軸受15,15と、回転軸16と、キャリア17と、すべり軸受18,19とを有する。ハウジング1の内周面に、円筒状のスライド部材11が、回り止めされ且つ軸方向に移動自在に支持されている。スライド部材11の内周面には、径方向内方に所定距離突出して螺旋状に形成された螺旋突起11aが設けられている。この螺旋突起11aに、後述する複数の遊星ローラ20が噛合している。
ハウジング1内におけるスライド部材11の軸方向一端側に、軸受部材12が設けられている。この軸受部材12は、径方向外方に延びるフランジ部と、ボス部とを有する。ボス部内に転がり軸受15,15が嵌合され、これら各軸受15,15の内輪内径面に回転軸16が嵌合されている。よって回転軸16は、軸受部材12に軸受15,15を介して回転自在に支持される。
スライド部材11の内周には、前記回転軸16を中心に回転可能なキャリア17が設けられている。キャリア17は、軸方向に互いに対向して配置されるディスク17a,17bを有する。軸受部材12に近いディスク17bをインナ側ディスク17bといい、ディスク17aをアウタ側ディスク17aという場合がある。一方のディスク17aのうち、他方のディスク17bに臨む側面には、この側面における外周縁部から軸方向に突出する間隔調整部材17cが設けられる。この間隔調整部材17cは、複数の遊星ローラ20の間隔を調整するため、円周方向に間隔を空けて複数配設されている。これら間隔調整部材17cにより、両ディスク17a,17bが一体に設けられる。
インナ側ディスク17bは、回転軸16との間に嵌合されたすべり軸受18により、回転自在に支持されている。アウタ側ディスク17aには、中心部に軸挿入孔が形成され、この軸挿入孔にすべり軸受19が嵌合されている。アウタ側ディスク17aは、すべり軸受19により回転軸16に回転自在に支持される。回転軸16の端部には、スラスト荷重を受けるワッシャが嵌合され、このワッシャの抜け止め用の止め輪が設けられる。
キャリア17には、複数のローラ軸21が周方向に間隔を空けて設けられている。各ローラ軸21の両端部が、ディスク17a,17bにわたって支持されている。すなわちディスク17a,17bには、それぞれ長孔から成る軸挿入孔が複数形成され、各軸挿入孔に各ローラ軸21の両端部が挿入されてこれらローラ軸21が径方向に移動自在に支持される。複数のローラ軸21には、これらローラ軸21を径方向内方に付勢する弾性リング22が掛け渡されている。
各ローラ軸21に、遊星ローラ20が回転自在に支持され、各遊星ローラ20は、回転軸16の外周面と、スライド部材11の内周面との間に介在される。複数のローラ軸21に渡って掛け渡された弾性リング22の付勢力により、各遊星ローラ20が回転軸16の外周面に押し付けられる。回転軸16が回転することで、この回転軸16の外周面に接触する各遊星ローラ20が接触摩擦により回転する。遊星ローラ20の外周面には、前記スライド部材11の螺旋突起11aに噛合する螺旋溝が形成されている。
キャリア17のインナ側ディスク17bと、遊星ローラ20の軸方向一端部との間には、ワッシャおよびスラスト軸受(いずれも図示せず)が介在されている。ハウジング1内において、インナ側ディスク17bと軸受部材12との間には、環状のスラスト板13およびスラスト軸受14が設けられている。
キャリア17のインナ側ディスク17bと、遊星ローラ20の軸方向一端部との間には、ワッシャおよびスラスト軸受(いずれも図示せず)が介在されている。ハウジング1内において、インナ側ディスク17bと軸受部材12との間には、環状のスラスト板13およびスラスト軸受14が設けられている。
減速機構3について説明する。
図2に示すように、減速機構3は、電動モータ2の回転を、回転軸16に固定された出力ギヤ23に減速して伝える機構であり、複数のギヤ列を含む。この例では、減速機構3は、電動モータ2のロータ軸2aに取付けられた入力ギヤ24の回転を、ギヤ列25,26,27により順次減速して、回転軸16の端部に固定された出力ギヤ23に伝達可能としている。
図2に示すように、減速機構3は、電動モータ2の回転を、回転軸16に固定された出力ギヤ23に減速して伝える機構であり、複数のギヤ列を含む。この例では、減速機構3は、電動モータ2のロータ軸2aに取付けられた入力ギヤ24の回転を、ギヤ列25,26,27により順次減速して、回転軸16の端部に固定された出力ギヤ23に伝達可能としている。
ロック機構5について説明する。
ロック機構5は、直動機構4の制動力弛み動作を阻止するロック状態と許容するアンロック状態とにわたって切換え可能に構成されている。前記減速機構3に、ロック機構5が設けられている。ロック機構5は、ケーシング(図示せず)と、ロックピン29と、このロックピン29をアンロック状態に付勢する付勢手段(図示せず)と、ロックピン29を切換え駆動するアクチュエータであるリニアソレノイド30とを有する。前記ケーシングは、ベースプレート8に支持され、このベースプレート8には、ロックピン29の進退を許すピン孔が形成されている。
ロック機構5は、直動機構4の制動力弛み動作を阻止するロック状態と許容するアンロック状態とにわたって切換え可能に構成されている。前記減速機構3に、ロック機構5が設けられている。ロック機構5は、ケーシング(図示せず)と、ロックピン29と、このロックピン29をアンロック状態に付勢する付勢手段(図示せず)と、ロックピン29を切換え駆動するアクチュエータであるリニアソレノイド30とを有する。前記ケーシングは、ベースプレート8に支持され、このベースプレート8には、ロックピン29の進退を許すピン孔が形成されている。
リニアソレノイド30によりロックピン29を進出させて、ギヤ列26における出力側の中間ギヤ28に形成された係止孔(図示せず)に係合し、中間ギヤ28の回転を禁止することで、ロック状態にする。リニアソレノイド30をオフにすると、前記付勢手段による付勢力により、ロックピン29を前記ケーシング内に退入させて前記係止孔から離脱させ、中間ギヤ28の回転を許すことで、ロック機構5をアンロック状態にする。
制御装置9等について説明する。
図3は、この電動ブレーキ装置の制御系のブロック図である。前記ブレーキ機構Bk(図1参照)を搭載する車両には、制御装置9と、センサ31と、スイッチ(入力操作手段)32と、車速検出手段33と、異常発生情報報知手段34とが設けられている。制御装置9は、車両統合制御装置35と、ブレーキコントローラ36と、異常検出部37と、異常検出動作タイマ38と、異常検出動作指令入力部39とを備える。車両統合制御装置35は、自動車全般の統括制御を行う電気制御ユニット(ECU)であり、ブレーキコントローラ36等に指令を与える上位制御手段である。この車両統合制御装置35は、コンピュータとこれに実行されるプログラム、および電子回路により構成される。
図3は、この電動ブレーキ装置の制御系のブロック図である。前記ブレーキ機構Bk(図1参照)を搭載する車両には、制御装置9と、センサ31と、スイッチ(入力操作手段)32と、車速検出手段33と、異常発生情報報知手段34とが設けられている。制御装置9は、車両統合制御装置35と、ブレーキコントローラ36と、異常検出部37と、異常検出動作タイマ38と、異常検出動作指令入力部39とを備える。車両統合制御装置35は、自動車全般の統括制御を行う電気制御ユニット(ECU)であり、ブレーキコントローラ36等に指令を与える上位制御手段である。この車両統合制御装置35は、コンピュータとこれに実行されるプログラム、および電子回路により構成される。
車両統合制御装置35は、運転者によるブレーキ操作手段40の動作量に応じて変化するセンサ31の出力に応じて減速指令を生成し、この減速指令をブレーキコントローラ36へ出力する。ブレーキコントローラ36は、基本制御手段36aと異常検出用動作制御手段36bとを有する。ブレーキコントローラ36における基本制御手段36aは、車両統合制御装置35からの減速指令に従って、各ブレーキ機構Bk(図1参照)に制動指令を与える。基本制御手段36aは、運転者によるブレーキ操作手段40の操作に応答して各ブレーキ機構Bkの電動モータ2を動作させ、ブレーキロータ6にブレーキパッド7を押し付けて制動力を与える(図1参照)。
異常検出用動作制御手段36bは、運転者によるブレーキ操作とは別に、すなわち車両走行中でかつブレーキ操作手段40が操作されていないときに、設定条件に従って各ブレーキ機構Bkの電動モータ2を動作させる。前記車両走行中であるか否かは、例えば、車速検出手段33により一定車速(例えば車速40km/h)以上の車速が検出されていれば、異常検出用動作制御手段36bが車両走行中であると判断する。なお異常検出用動作制御手段36bは、基本制御手段36aの一部の機能として設けられても良い。
図4は、この電動ブレーキ装置の制御装置9の異常検出用ブレーキ制御部9aおよびその他の要素を示すブロック図である。前記異常検出用ブレーキ制御部9aは、制御装置9のうち異常検出用動作制御手段36bと、異常検出部37と、異常検出動作タイマ38と、異常検出動作指令入力部39とを有する。
異常検出用動作制御手段36bは、異常検出動作生成部41と、電動ブレーキ駆動部42とを有する。異常検出動作生成部41は、後述する異常検出動作トリガの発生を検出すると、ブレーキロータ6とブレーキパッド7間の隙間を増減つまり拡大または減少する異常検出動作指令を電動ブレーキ駆動部42に与える。電動ブレーキ駆動部42は、異常検出動作指令に従って電動モータ2を回転させる。
異常検出部37は、異常検出用動作制御手段36bにより電動モータ2を回転させたときに車両についての定められた事項の測定値を取得し、この測定値を推定値または設定値と比較して電動ブレーキ装置の異常有無を検出する。前記「車両についての定められた事項の測定値」は、電動モータ2を回転させたときの、例えば、ブレーキパッド7の実際の押圧力である。前記「推定値または設定値」は、電動モータ2を回転させたときの、例えば、モータ回転角、および、モータ電流から演算される発生トルク等から推定されるブレーキパッド7の押圧力である。
電動ブレーキ駆動部42が異常検出動作指令に従って電動モータ2を回転させ、ブレーキロータ6とブレーキパッド7間の隙間を拡大または減少させたときに、異常検出部37は、電動モータ2への印加電圧、モータ電流、およびモータ回転角のうち、少なくとも二つ以上の相関関係を示す相関関係値と、設定された比較用の値との差が許容範囲内であるか否かを判断し、電動ブレーキ装置の正常動作を確認する。異常検出部37は、前記差が許容範囲内と判断すると、電動ブレーキ装置が正常に動作していると検出する。前記「設定された比較用の値」は、例えば、試験やシミュレーション等により定められる。
異常検出動作タイマ38は、電動ブレーキ駆動部42からブレーキ駆動状態を受け取る。このブレーキ駆動状態は、前述のブレーキパッド7の実際の押圧力、モータ回転角、および、発生トルク等から得られる情報である。異常検出動作タイマ38は、前記ブレーキ駆動状態に基づき、ブレーキ操作手段40(図3)を一定時間操作しない車両走行を継続させたときに、異常検出動作トリガを生成する。この異常検出動作トリガは、前記異常検出動作生成部41により検出される。異常検出動作トリガは、また、異常検出動作指令入力部39によって、操作者によるスイッチ32の操作に応答して生成される。この入力部39で生成された異常検出動作トリガも異常検出動作生成部41により検出される。
異常発生情報報知手段34は、例えば、車両のコンソールパネルに設けられた車内表示装置のような表示手段である。車両統合制御装置35は、異常検出部37から出力された電動ブレーキ装置の異常発生の情報を受けて、前記表示手段に異常を知らせる表示を行わせる。これにより、運転者は、異常発生の情報を早期に認識して、例えば、車両を他の車両の交通の妨げにならない場所に退避して停車する等、適切に対処し得る。
異常検出を行う前は、前記基本制御手段36a(図3)による通常のブレーキ動作終了後の状態であるとする。異常検出前の状態は、ブレーキロータ6とブレーキパッド7との間には僅かに隙間(以後、この隙間を「僅かな隙間」と呼ぶ)がある。この僅かな隙間の大きさは、ブレーキロータ6にブレーキパッド7を接触させるには、明らかに電動モータ2を回転させる必要があって、振動などによって偶然ブレーキロータ6にブレーキパッド7が接触することがない程度の大きさである。
図5は、この電動ブレーキ装置の異常有無を検出するフローチャートであり、図6は、同電動ブレーキ装置の異常検出時のフローチャートである。図5または図6と共に図3も参照しつつ説明する。この例は、簡便のため最も単純な異常検出フローを説明したものであり、異常検出方法や再検査方法、繰り返し回数、繰り返し検出動作後に正常と判断された場合のフローの戻り位置などは、これに限定されるものではない。
図5に示すように、本処理開始後、異常検出動作タイマ38が電動ブレーキ駆動部42からブレーキ駆動状態を受け取り、ブレーキ操作手段による操作を最後に使用した時点からの時間を計測する。一定時間が経過したら、異常検出動作トリガを生成する。前記一定時間とは、例えば、ブレーキ操作手段によるブレーキ無使用が10分間や、ブレーキ操作手段によるブレーキ無使用かつ車速40km/h等の一定車速以上の走行する時間が10分間である。なおこの図5のフローチャートに示していないが、異常検出動作指令入力部39から入力される運転者のスイッチ入力や、車両統合制御装置35からの指令によっても異常検出動作トリガは生成される。
異常検出動作生成部41が異常検出動作トリガを検出すると(ステップS1のyes)、異常検出動作生成部41は、電動モータ2を回転させ前記僅かな隙間を減らす指令を、電動ブレーキ駆動部42に与える(ステップS2)。この段階ではブレーキパッド7はブレーキロータ6に対し非接触状態である。このとき異常検出部37は、電動モータ2のモータ回転角を読み取る。異常検出部37は、このときのモータ回転角の変化に基づいて、電動モータ2が指令通りに回転していることを確認し(ステップS3のyes)、ステップS4に移行する。なお、ステップS1において、異常検出動作生成部41が異常検出動作トリガを検出しなければ(ステップS1のno)、ステップS1に戻り、異常検出動作トリガの発生を検出するまで待機する。
ステップS4において、異常検出動作生成部41は、さらに電動モータ2を回転もしくはトルクを発生させる指令を電動ブレーキ駆動部42に与え、ブレーキパッド7に押圧力を発生させてブレーキパッド7をブレーキロータ6に軽接触させる。なおステップS2において、押圧力が発生する程度まで電動モータ2を回転させても良い。異常検出部37は、押圧力を発生させたときの、モータ回転角および発生トルクから推定される押圧力と、実際に発生した押圧力とを比較する(ステップS5)。正常な場合は(ステップS5のyes)、ステップS1に戻り、次の異常検出動作トリガの発生を検出するまで待機する。
ステップS3において、異常検出部37が、電動モータ2が指令通りに回転しないと判断した場合(ステップS3のno)、異常検出時処理へ進む(ステップS6)。同様に、ステップS5において、異常検出部37が、指令通りに押圧力が発生しないと判断した場合も(ステップS5のno)、異常検出時処理へ進む(ステップS6)。この際、異常検出部37が異常検出信号を異常検出動作生成部41に与えることで、この異常検出動作生成部41は、異常検出時処理のための指令を生成する。
図6に示すように、異常検出動作生成部41は、電動モータ2を逆方向に回転させ前記僅かな隙間を一度拡大する指令を、電動ブレーキ駆動部42に与える(ステップS7)。異常検出部37が、このときのモータ回転角に基づいて、電動モータ2が指令通りに回転していることを確認すると(ステップS8のyes)、異常検出動作生成部41は、電動モータ2を正方向に回転させ前記僅かな隙間を減らす指令を電動ブレーキ駆動部42に与え、電動モータ2を回転させる(ステップS9)。
次に、異常検出動作生成部41は、さらに電動モータ2を回転もしくはトルクを発生させる指令を電動ブレーキ駆動部42に与え、ブレーキパッド7に押圧力を発生させてブレーキパッド7をブレーキロータ6に軽接触させる(ステップS10)。異常検出部37は、押圧力を発生させたときの、モータ回転角および発生トルクから推定される押圧力と、実際に発生した押圧力とを比較する(ステップS11)。正常な場合は(ステップS11のyes)、先の異常判断が間違いであったと判断し(ステップS12)、ステップS1に戻り、異常検出動作トリガの発生を検出するまで待機する。
ステップS8において、異常検出部37は、電動モータ2が指令通りに回転しないと判断した場合(ステップS8のno)、モータ駆動不能と判断できる(ステップS13)。このとき、電動モータ2を回転できない、もしくは電動モータ2の回転を検出できない状態であり、例えば、電動モータ2の固着、ブレーキ機構Bkのロック、図示外の電流駆動素子の異常、モータ回転角を検出するモータ回転角度検出機構43の異常等が考えられ、正常に電流を流すことができない場合は、電流センサの異常やモータコイルの短絡などが考えられる。
ステップS11において、異常検出部37が、指令通りに押圧力が発生しないと判断した場合は(ステップS11のno)、押圧発生不能と判断できる(ステップS14)。このとき電動モータ2は回転するが、ブレーキパッド7による押圧力が発生しない状態であり、ブレーキ機構Bkの異常によるモータ空転やキャリパ異常などが考えられる。異常の状態にあることが確定した後、車両統合制御装置35は、異常検出部37から出力された異常発生の情報を受けて、異常発生情報報知手段34に異常を知らせる表示を行わせる(ステップS15)。その後、例えば、フェールセーフ用の機構を使用したり、制動力を分担するなどの異常時の対策を実施する(ステップS16)。その後本処理を終了する。
作用効果について説明する。
異常検出用動作制御手段36bは、車両走行中でかつブレーキ操作手段40が操作されていないときに、前述のように電動モータ2を動作させる。このとき、電動モータ2が指令通りに回転しない、または、指令通りに押圧力が発生しないと異常検出部37で判断すると、電動ブレーキ装置の異常を検出する。
異常検出用動作制御手段36bは、車両走行中でかつブレーキ操作手段40が操作されていないときに、前述のように電動モータ2を動作させる。このとき、電動モータ2が指令通りに回転しない、または、指令通りに押圧力が発生しないと異常検出部37で判断すると、電動ブレーキ装置の異常を検出する。
このように車両走行中において、運転者によりブレーキ操作手段40が操作されていないときに、電動ブレーキ装置の異常の有無を検出することができる。例えば、高速道路走行中のような、長時間ブレーキを用いずに走行する状況下において、電動ブレーキ装置の異常の有無を早期に検出することができる。電動ブレーキ装置の異常を検出した場合、運転者は、例えば、車両を他の車両の交通の妨げにならない場所に退避して停車する等、適切に対処することができる。
異常検出動作タイマ38が異常検出動作トリガを生成し、異常検出用動作制御手段36bが、この異常検出動作トリガの発生を検出して、電動モータ2を回転させる異常検出用動作を実行するため、運転者による操作を必要とせずに異常検出用動作を自動で実行することができ、運転者の操作負担を軽減することができる。
また、運転者によるスイッチ入力により、異常検出動作指令入力部39が異常検出用動作制御手段36bに対して、電動モータ2を動作させる異常検出用動作を実行させる指令を与えてもよい。これにより、運転者による任意のタイミングで異常検出用動作を実行することができる。
第2の実施形態について説明する。
図4に示すように、モータ回転角度検出機構43には、ブレーキロータ6にブレーキパッド7を押し付けたときのブレーキ力を検出するブレーキ力検出部44が設けられる。異常検出用動作制御手段36bにより、ブレーキパッド7をブレーキロータ6に軽接触させたときに、異常検出部37は、電動モータ2への印加電圧、モータ電流、およびモータ回転角のうち少なくとも一つ以上から推定されるブレーキ力と、ブレーキ力検出部44で検出されるブレーキ力とを比較し、これらブレーキ力の差が設定された許容範囲内であるか否かを判断し、電動ブレーキ装置の正常動作を確認しても良い。
図4に示すように、モータ回転角度検出機構43には、ブレーキロータ6にブレーキパッド7を押し付けたときのブレーキ力を検出するブレーキ力検出部44が設けられる。異常検出用動作制御手段36bにより、ブレーキパッド7をブレーキロータ6に軽接触させたときに、異常検出部37は、電動モータ2への印加電圧、モータ電流、およびモータ回転角のうち少なくとも一つ以上から推定されるブレーキ力と、ブレーキ力検出部44で検出されるブレーキ力とを比較し、これらブレーキ力の差が設定された許容範囲内であるか否かを判断し、電動ブレーキ装置の正常動作を確認しても良い。
これにより、異常検出部37は、前記推定されるブレーキ力と、ブレーキ力検出部44で検出されるブレーキ力との差が設定された許容範囲内であると判断すると、電動ブレーキ装置が正常に動作している旨検出する。
運転者による前記車両のアクセルの操作を解除し車両が減速に転じたときに、異常検出用動作制御手段36bが、ブレーキパッド7をブレーキロータ6に軽接触させても良い。ブレーキパッド7をブレーキロータ6に軽接触させると、微小ながら減速度が発生して、車両の搭乗者が違和感を覚える。
これに対して、前記車両のアクセルの操作を解除したタイミングで軽接触させるのであれば、前記タイミングは、走行抵抗による減速や、エンジンブレーキもしくはそれに相当する回生制動による減速により減速度が発生するタイミングと重なり異常検出用動作による特別な違和感を搭乗者は覚えにくい。
この構成によると、前記車両のアクセルの操作を解除し車両が減速に転じたときに、ブレーキパッド7をブレーキロータ6に軽接触させるため、車両の搭乗者が異常検出用動作による特別な違和感を覚えにくい。
前記軽接触によるブレーキ力は、車両の走行抵抗による減速度に対して、一定の割合以下の減速度を発生するブレーキ力であっても良い。例えば、車両の走行速度が高い場合は、走行抵抗が大きく、搭乗者は比較的違和感を覚えにくくなる。よって、軽接触によるブレーキ力を、走行抵抗による減速度に対して、一定の割合(例えば10%)以下の減速度を発生するブレーキ力とすることで、車両の搭乗者が異常検出用動作による違和感を覚えにくくなる。
電動ブレーキ装置の異常検出用動作要求が発生した状態において、車両に一定以上の加速度が発生した際に前記軽接触を実施し、この軽接触によるブレーキ力が、前記加速度の一定の割合以下の減速度を発生する大きさであっても良い。この場合、例えば、アクセルが強く踏まれて操作されて加速する場合に、この加速力より極めて小さい(例えば1%程度)減速度が発生するように、ブレーキパッド7の軽接触動作を実施する。これにより、車両の搭乗者は異常検出用動作による違和感を覚えにくくなる。
以上説明した一連の異常検出は、電動ブレーキ装置を最後に使用してから一定時間経過後に、例えば車両の4輪に対して同時に実施しても、1輪ずつ順番に実施してもよい。また、例えば10分間で1輪実施し、40分で4輪完了するなどしても良い。
以上の説明では、押圧力を検出する方法を例示したが、タイヤに発生する制動力を直接計測する機構、例えば、タイヤ回転軸力センサや、車両に発生した減速度を計測する機構、例えば、車両加速度センサを用いても良い。
2…電動モータ(電動アクチュエータ)
6…ブレーキロータ
7…ブレーキパッド(押圧部材)
9…制御装置
36a…基本制御手段
36b…異常検出用動作制御手段
37…異常検出部
40…ブレーキ操作手段
6…ブレーキロータ
7…ブレーキパッド(押圧部材)
9…制御装置
36a…基本制御手段
36b…異常検出用動作制御手段
37…異常検出部
40…ブレーキ操作手段
Claims (11)
- ブレーキロータと、
押圧部材と、
前記ブレーキロータに前記押圧部材を押し付ける電動アクチュエータと、
この電動アクチュエータを制御する制御装置とを備えた電動ブレーキ装置であって、
前記制御装置は、
運転者によるブレーキ操作手段の操作に応答して前記電動アクチュエータを動作させ、前記ブレーキロータに前記押圧部材を押し付けて制動力を与える基本制御手段と、
車両走行中でかつ前記ブレーキ操作手段が操作されていない間に、設定条件に従って前記電動アクチュエータを動作させる異常検出用動作制御手段と、
この異常検出用動作制御手段により前記電動アクチュエータを動作させたときに前記車両についての定められた事項の測定値を取得し、この測定値を推定値または設定値と比較して前記電動ブレーキ装置の異常有無を検出する異常検出部とを備えた、電動ブレーキ装置。 - 請求項1に記載の電動ブレーキ装置において、前記制御装置は、さらに、
前記ブレーキ操作手段を一定時間操作しない車両走行が継続している場合に、前記異常検出用動作制御手段に対して、前記電動アクチュエータを動作させる異常検出用動作を実行させる指令を、定められた時間毎に与える異常検出動作タイマを有し、
前記異常検出用動作制御手段は、前記異常検出動作タイマの指令に基づき、前記電動アクチュエータを動作させる電動ブレーキ装置。 - 請求項1または請求項2に記載の電動ブレーキ装置において、前記制御装置は、さらに、
操作者による入力操作手段からの入力に応答して、前記異常検出用動作制御手段に対して、前記電動アクチュエータを動作させる異常検出用動作を実行させる指令を与える異常検出動作指令入力部を有する電動ブレーキ装置。 - 請求項3に記載の電動ブレーキ装置において、前記異常検出動作指令入力部に与えられる指令が、前記制御装置の外部に接続された外部接続機器により生成される電動ブレーキ装置。
- 請求項1ないし請求項4のいずれか1項に記載の電動ブレーキ装置において、前記異常検出用動作制御手段により前記電動アクチュエータを動作させて、前記押圧部材が前記ブレーキロータに非接触状態のとき、前記異常検出部により前記電動ブレーキ装置の異常有無を検出する電動ブレーキ装置。
- 請求項5記載の電動ブレーキ装置において、前記押圧部材が前記ブレーキロータに非接触状態で異常が検出されなかったとき、前記異常検出用動作制御手段により前記電動アクチュエータを動作させ、前記押圧部材を前記ブレーキロータに軽接触させた状態で、前記異常検出部により前記電動ブレーキ装置の異常有無を検出する電動ブレーキ装置。
- 請求項1ないし請求項6のいずれか1項に記載の電動ブレーキ装置において、前記異常検出用動作制御手段により、前記ブレーキロータと前記押圧部材との間隔を増加および/または減少させている間に、前記異常検出部は、前記電動アクチュエータへの印加電圧、ならびに前記電動アクチュエータの電流および回転角のうち、少なくとも二つ以上の相関関係を示す相関関係値と、設定された比較用の値との差が許容範囲内であるか否かを判断し、前記電動ブレーキ装置の正常動作を確認する電動ブレーキ装置。
- 請求項1ないし請求項7のいずれか1項に記載の電動ブレーキ装置において、さらに、前記ブレーキロータに前記押圧部材を押し付けたときのブレーキ力を検出するブレーキ力検出部を備え、
前記異常検出用動作制御手段によって、前記押圧部材が前記ブレーキロータに軽接触させられている間に、前記異常検出部は、前記電動アクチュエータへの印加電圧、前記電動アクチュエータの電流、および回転角のうち少なくとも一つ以上から推定されるブレーキ力と、前記ブレーキ力検出部で検出されるブレーキ力とを比較し、これらブレーキ力の差が設定された許容範囲内であるか否かを判断し、前記電動ブレーキ装置の正常動作を確認する電動ブレーキ装置。 - 請求項8に記載の電動ブレーキ装置において、運転者による前記車両のアクセルの操作が解除されて前記車両が減速に転じたときに、前記異常検出用動作制御手段が、前記押圧部材を前記ブレーキロータに軽接触させる電動ブレーキ装置。
- 請求項8または請求項9に記載の電動ブレーキ装置において、前記軽接触によるブレーキ力は、前記車両の走行抵抗による減速度に対して、一定の割合以下の減速度を発生させるブレーキ力である電動ブレーキ装置。
- 請求項8ないし請求項10のいずれか1項に記載の電動ブレーキ装置において、前記車両に一定以上の加速度が発生したときに、前記異常検出用動作制御手段が、前記押圧部材を前記ブレーキロータに軽接触させ、前記軽接触によるブレーキ力は、前記加速度の一定の割合以下の減速度を発生させるブレーキ力である電動ブレーキ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480062542.XA CN105745128B (zh) | 2013-11-19 | 2014-11-06 | 电动制动装置 |
| EP14863817.4A EP3072762B1 (en) | 2013-11-19 | 2014-11-06 | Electric brake device |
| US15/146,521 US9956947B2 (en) | 2013-11-19 | 2016-05-04 | Electric brake device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013238690A JP6452934B2 (ja) | 2013-11-19 | 2013-11-19 | 電動ブレーキ装置 |
| JP2013-238690 | 2013-11-19 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/146,521 Continuation US9956947B2 (en) | 2013-11-19 | 2016-05-04 | Electric brake device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2015076109A1 true WO2015076109A1 (ja) | 2015-05-28 |
| WO2015076109A8 WO2015076109A8 (ja) | 2016-05-12 |
Family
ID=53179376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/079408 WO2015076109A1 (ja) | 2013-11-19 | 2014-11-06 | 電動ブレーキ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9956947B2 (ja) |
| EP (1) | EP3072762B1 (ja) |
| JP (1) | JP6452934B2 (ja) |
| CN (1) | CN105745128B (ja) |
| WO (1) | WO2015076109A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6451662B2 (ja) * | 2016-02-23 | 2019-01-16 | 株式会社安川電機 | 異常判定装置、異常判定プログラム、異常判定システム、及びモータ制御装置 |
| JP6589842B2 (ja) * | 2016-12-13 | 2019-10-16 | トヨタ自動車株式会社 | 電動ブレーキシステム |
| DE102017204178A1 (de) * | 2017-03-14 | 2018-09-20 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Absicherung der Funktionsfähigkeit eines Bedienelements einer Parkbremse |
| KR102315860B1 (ko) * | 2017-06-05 | 2021-10-21 | 현대자동차주식회사 | Abs를 이용한 캘리퍼 고장 검출 방법 |
| JP6933517B2 (ja) * | 2017-07-13 | 2021-09-08 | ファナック株式会社 | モータ制御装置 |
| JP6939273B2 (ja) * | 2017-08-31 | 2021-09-22 | 株式会社アドヴィックス | ブレーキ制御装置 |
| JP6539321B2 (ja) * | 2017-09-25 | 2019-07-03 | 株式会社Subaru | 車両の制御システム及び車両の制御方法 |
| CN108162949B (zh) * | 2017-12-28 | 2020-05-26 | 天津清智科技有限公司 | 一种判断汽车制动电磁阀故障的方法 |
| JP6876194B2 (ja) * | 2018-02-21 | 2021-05-26 | 日立Astemo株式会社 | 電動ブレーキおよび制御装置 |
| US20210078557A1 (en) * | 2018-02-21 | 2021-03-18 | Hitachi Automotive Systems, Ltd. | Electric brake device and electric brake control device |
| JP7056367B2 (ja) * | 2018-05-17 | 2022-04-19 | トヨタ自動車株式会社 | 認識エラー検出装置、電動ブレーキ制御装置 |
| CN110550011B (zh) * | 2018-05-31 | 2021-11-12 | 比亚迪股份有限公司 | 制动力估算方法、装置、存储介质及车辆 |
| CN110103931B (zh) * | 2019-04-28 | 2024-01-19 | 北京百度网讯科技有限公司 | 一种检测车辆制动异常的方法、装置 |
| JP7243788B2 (ja) * | 2020-12-25 | 2023-03-22 | トヨタ自動車株式会社 | 制御装置、マネージャ、システム、制御方法、プログラム及び車両 |
| JP7519947B2 (ja) * | 2021-03-30 | 2024-07-22 | 株式会社クボタ | 自走作業車 |
| KR20220146160A (ko) * | 2021-04-23 | 2022-11-01 | 에이치엘만도 주식회사 | 전자식 주차 브레이크 시스템 및 그 제어방법 |
| CN117162984A (zh) * | 2022-12-06 | 2023-12-05 | 北京车和家汽车科技有限公司 | 车辆制动控制方法、装置、电子设备、介质和车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05893B2 (ja) | 1984-01-23 | 1993-01-07 | Toshiba Kk | |
| JP2002058288A (ja) | 2000-05-31 | 2002-02-22 | Tokico Ltd | 電動ディスクブレーキ装置 |
| JP2004359169A (ja) | 2003-06-06 | 2004-12-24 | Hitachi Ltd | 電動ブレーキ装置 |
| JP2006232259A (ja) | 2005-01-27 | 2006-09-07 | Hitachi Ltd | 電動ブレーキ装置および電動ブレーキ制御装置 |
| WO2009013172A1 (de) * | 2007-07-23 | 2009-01-29 | Siemens Aktiengesellschaft | Verfahren zum statischen überprüfen eines bremssystems eines fahrzeugs |
| WO2013034735A2 (de) * | 2011-09-09 | 2013-03-14 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | Bremssteuereinrichtung für eine bremsanlage, bremsanlage, schienenfahrzeug sowie verfahren zum betreiben einer bremsanlage |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08127332A (ja) * | 1994-10-31 | 1996-05-21 | Sumitomo Electric Ind Ltd | アンチロックブレーキ装置 |
| JPH11170991A (ja) * | 1997-12-16 | 1999-06-29 | Toyota Motor Corp | 電気式ブレーキ異常判定方法 |
| JP2007015469A (ja) * | 2005-07-05 | 2007-01-25 | Fujitsu Ten Ltd | 運転補助装置の制御装置および制御方法 |
| DE102011077786A1 (de) * | 2011-06-20 | 2012-12-20 | Continental Teves Ag & Co. Ohg | Aktuatorsystem und Betriebsverfahren für ein Aktuatorsystem |
-
2013
- 2013-11-19 JP JP2013238690A patent/JP6452934B2/ja active Active
-
2014
- 2014-11-06 WO PCT/JP2014/079408 patent/WO2015076109A1/ja active Application Filing
- 2014-11-06 CN CN201480062542.XA patent/CN105745128B/zh not_active Expired - Fee Related
- 2014-11-06 EP EP14863817.4A patent/EP3072762B1/en not_active Not-in-force
-
2016
- 2016-05-04 US US15/146,521 patent/US9956947B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05893B2 (ja) | 1984-01-23 | 1993-01-07 | Toshiba Kk | |
| JP2002058288A (ja) | 2000-05-31 | 2002-02-22 | Tokico Ltd | 電動ディスクブレーキ装置 |
| JP2004359169A (ja) | 2003-06-06 | 2004-12-24 | Hitachi Ltd | 電動ブレーキ装置 |
| JP2006232259A (ja) | 2005-01-27 | 2006-09-07 | Hitachi Ltd | 電動ブレーキ装置および電動ブレーキ制御装置 |
| WO2009013172A1 (de) * | 2007-07-23 | 2009-01-29 | Siemens Aktiengesellschaft | Verfahren zum statischen überprüfen eines bremssystems eines fahrzeugs |
| WO2013034735A2 (de) * | 2011-09-09 | 2013-03-14 | Knorr-Bremse Systeme für Schienenfahrzeuge GmbH | Bremssteuereinrichtung für eine bremsanlage, bremsanlage, schienenfahrzeug sowie verfahren zum betreiben einer bremsanlage |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3072762A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US9956947B2 (en) | 2018-05-01 |
| EP3072762A4 (en) | 2017-08-23 |
| CN105745128B (zh) | 2018-12-28 |
| EP3072762B1 (en) | 2018-09-19 |
| WO2015076109A8 (ja) | 2016-05-12 |
| EP3072762A1 (en) | 2016-09-28 |
| US20160244042A1 (en) | 2016-08-25 |
| JP6452934B2 (ja) | 2019-01-16 |
| CN105745128A (zh) | 2016-07-06 |
| JP2015098253A (ja) | 2015-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015076109A1 (ja) | 電動ブレーキ装置 | |
| EP3241713B1 (en) | Electric brake actuator with parking function | |
| JP6289855B2 (ja) | パーキング機能付き電動ブレーキ装置 | |
| EP2907709B1 (en) | Electric-powered parking brake device | |
| US10113601B2 (en) | Electric brake device | |
| CN104114426B (zh) | 电停车制动器控制装置和控制方法以及制动系统 | |
| JP6336273B2 (ja) | 車両用ブレーキ装置 | |
| JP5811507B2 (ja) | レンジ切換装置の異常診断装置 | |
| EP2810807B1 (en) | Vehicle control device | |
| JP2019041538A (ja) | 電動車両の制御装置 | |
| JP2021131114A (ja) | 車両制御システム | |
| JP6621689B2 (ja) | 直動アクチュエータ | |
| JP5956001B2 (ja) | 電動ブレーキ装置 | |
| JP2005016600A (ja) | 電動パーキングブレーキ装置 | |
| JP6242641B2 (ja) | 電動ブレーキ装置システム | |
| JP6685749B2 (ja) | パーキング装置 | |
| JP2018118623A (ja) | ブレーキストロークセンサの故障検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14863817 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014863817 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014863817 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |