WO2014054655A1 - インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 - Google Patents
インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 Download PDFInfo
- Publication number
- WO2014054655A1 WO2014054655A1 PCT/JP2013/076735 JP2013076735W WO2014054655A1 WO 2014054655 A1 WO2014054655 A1 WO 2014054655A1 JP 2013076735 W JP2013076735 W JP 2013076735W WO 2014054655 A1 WO2014054655 A1 WO 2014054655A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pressure
- drive
- pressure chambers
- ink
- driving
- Prior art date
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/14—Structure thereof only for on-demand ink jet heads
- B41J2/14201—Structure of print heads with piezoelectric elements
- B41J2/14209—Structure of print heads with piezoelectric elements of finger type, chamber walls consisting integrally of piezoelectric material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04543—Block driving
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04573—Timing; Delays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/015—Ink jet characterised by the jet generation process
- B41J2/04—Ink jet characterised by the jet generation process generating single droplets or particles on demand
- B41J2/045—Ink jet characterised by the jet generation process generating single droplets or particles on demand by pressure, e.g. electromechanical transducers
- B41J2/04501—Control methods or devices therefor, e.g. driver circuits, control circuits
- B41J2/04581—Control methods or devices therefor, e.g. driver circuits, control circuits controlling heads based on piezoelectric elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/005—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by bringing liquid or particles selectively into contact with a printing material
- B41J2/01—Ink jet
- B41J2/135—Nozzles
- B41J2/14—Structure thereof only for on-demand ink jet heads
- B41J2002/14459—Matrix arrangement of the pressure chambers
Definitions
- the present invention relates to an ink-jet head driving method, an ink-jet head driving apparatus, and an ink-jet recording apparatus. More specifically, the present invention relates to cross-talk in an ink-jet head in which two or more pressure chambers communicate with each other through a common ink chamber. The present invention relates to an inkjet head driving method, an inkjet head driving apparatus, and an inkjet recording apparatus that can reduce the influence.
- Ink jet heads that generate pressure in the pressure chamber by the operation of the pressure applying means and eject ink from the pressure chamber from the nozzles are required to record at higher speed and with higher precision, and the number of nozzles and nozzle rows is increasing. It tends to increase. Along with this, the pressure wave generated in the pressure chamber at the time of discharge propagates to other pressure chambers to increase the crosstalk that makes the droplet velocity (droplet amount) unstable and simultaneously drives a number of pressure chambers. This increases the driving load.
- the instability of the droplet velocity due to crosstalk is caused by the pressure wave generated in the pressure chamber during ejection propagating from the inlet side of the pressure chamber to the common ink chamber and affecting other pressure chambers via the common ink chamber. It is generated by exerting.
- the pressure wave is transmitted to the other pressure chambers via the common ink chamber. Since it also propagates to each pressure chamber in the row, it is important to suppress crosstalk between the rows of pressure chambers.
- Patent Document 1 discloses that a common ink chamber is divided into two along a row of pressure chambers by a separation wall, and a pressure wave propagates from one pressure chamber row to the other pressure chamber row. It is described to prevent.
- the wall surface of the common ink chamber facing the inlet of the pressure chamber is defined to have a predetermined volume modulus or less, thereby attenuating the pressure wave propagated into the common ink chamber and causing crosstalk. It is described to reduce.
- Patent Document 3 discloses that the nozzle pitch between nozzle rows is shifted from an integer multiple of the minimum pixel pitch, and the phase of the drive signal is shifted according to the shift amount from each nozzle row. It is described that the load on the driving circuit is suppressed by adjusting so that the liquid droplets land on the lattice points of the image.
- Patent Document 4 discloses that power consumption can be reduced by shifting the phase of the drive signal by a predetermined delay time so that the peak value of the charging current for charging or discharging the piezoelectric element does not overlap between channels. It is described that it is planned. This delay time is said to be equal to the start-up time determined by the capacitance of the piezoelectric element and the charging resistance.
- the present inventor has intensively studied the problem of crosstalk and driving load between rows of pressure chambers communicating with each other through a common ink chamber. It has been found that the problem of crosstalk and driving load can be solved simultaneously by not only shifting the phase of the driving signal but also giving a specific phase difference.
- the present invention provides an inkjet head that can simultaneously reduce crosstalk and driving load generated between rows of a plurality of pressure chambers communicating with each other through a common ink chamber without changing the head structure. It is an object of the present invention to provide a driving method, an inkjet head driving apparatus, and an inkjet recording apparatus.
- N is an integer of 2 or more
- AL is 1/2 of the acoustic resonance period of the pressure wave in the pressure chamber
- t is the pressure wave transmission obtained by “the distance between nozzles between the drive groups” / “the speed at which the sound travels through the ink”
- the row of pressure chambers is driven by two or more drive circuits; 2. The method of driving an ink-jet head according to claim 1, wherein the row of pressure chambers having the same driving circuit is divided into different driving groups.
- the ink-jet head has head chips that are open at end faces where the inlet and the outlet of the pressure chamber are opposite to each other, and the pressure chamber is formed in a straight shape from the inlet to the outlet, and the pressure in the head chip 4.
- N is an integer of 2 or more
- AL is 1/2 of the acoustic resonance period of the pressure wave in the pressure chamber
- t is determined by “distance between nozzles between drive groups” / “sound value transmitted in ink”.
- Ink jet head drive device that provides a phase difference in pressure wave transmission time.
- the ink-jet head has head chips that are open at end faces where the inlet and the outlet of the pressure chamber are opposite to each other, and the pressure chamber is formed in a straight shape from the inlet to the outlet, and the pressure in the head chip
- the inkjet head driving device according to 5, 6, or 7, wherein the common ink chamber is disposed on an inlet side of the chamber.
- An inkjet head in communication with An ink jet recording apparatus comprising: the ink jet head drive device according to any one of 5 to 8 above.
- FIG. shows schematic structure of an inkjet recording device Exploded perspective view showing schematic configuration of inkjet head Partial rear view of the head chip shown in FIG. Partial sectional view of the head chip
- FIG. 1 is a schematic configuration diagram showing an example of an ink jet recording apparatus according to the present invention.
- the recording medium P is sandwiched between the transport roller pair 201 of the transport mechanism 200 and further transported in the Y direction (sub-scanning direction) by the transport roller 203 that is rotationally driven by the transport motor 202. It has become.
- An ink jet head H is provided between the transport roller 203 and the transport roller pair 201 so as to face the recording surface PS of the recording medium P.
- This inkjet head H is illustrated in the figure X, which is substantially orthogonal to the conveyance direction (sub-scanning direction) of the recording medium P by a driving unit (not shown) along the guide rail 300 spanned across the width direction of the recording medium P.
- a carriage 400 provided so as to be capable of reciprocating along the ⁇ X ′ direction (main scanning direction) is mounted such that the nozzle surface side faces the recording surface PS of the recording medium P. Details will be described later.
- the drive device 500 is electrically connected via the FPC 4.
- the ink jet head H scans the recording surface PS of the recording medium P in the XX ′ direction in the drawing as the carriage 400 moves in the main scanning direction, and discharges droplets from the nozzles during the scanning movement. Record the desired inkjet image.
- FIGS. 2 is an exploded perspective view of the inkjet head
- FIG. 3 is a partial rear view of the head chip
- FIG. 4 is a partial cross-sectional view of the head chip.
- 1 is a so-called harmonica type head chip
- 2 is a nozzle plate
- 3 is a wiring board
- 4 is an FPC
- 5 is an ink manifold.
- the head chip 1 has a hexahedral shape and has two channel rows in which a plurality of channels are arranged.
- the lower channel row in FIG. 3 is the A row
- the upper channel row is the B row.
- the head chip 1 has, as channels, a drive channel 11 through which ink that is a pressure chamber is ejected and a dummy channel 12 through which ink is not ejected, and performs recording by ejecting ink from only the drive channel 11. It is an independent drive type head chip.
- the drive channel in the A column may be referred to as 11A, the drive channel in the B column as 11B, the dummy channel in the A column as 12A, and the dummy channel in the B column as 12B.
- drive channels 11A and 11B and dummy channels 12A and 12B are alternately arranged. Between the adjacent drive channel 11A or 11B and the dummy channels 12A and 12B, there is a partition wall 13 which is a pressure applying means made of a piezoelectric element such as PZT.
- the A row partition may be referred to as 13A
- the B row partition may be referred to as 13B.
- the drive channels 11A and 11B and the dummy channels 12A and 12B are opened in the front end surface 1a and the rear end surface 1b of the head chip 1, respectively, and the drive electrodes 14 are formed in close contact with the inner surfaces thereof.
- the drive channels 11A and 11B and the dummy channels 12A and 12B have openings at the front end surface 1a and the rear end surface 1b, which are opposite end surfaces of the head chip 1, and are formed in a straight shape from the inlet to the outlet. Has been.
- the end surface on the side where ink is ejected from the head chip 1 is referred to as “front end surface”, and the opposite end surface is referred to as “rear end surface”.
- connection electrodes 15A and 15B that are electrically connected to the drive electrodes 13A and 13B of the drive channels 11A and 11B and the dummy channels 12A and 12B are formed, respectively.
- One end of each connection electrode 15A, 15B is electrically connected to the drive electrode 13A, 13B in the corresponding drive channel 11A, 11B or dummy channel 12A, 12B.
- connection electrodes 15A corresponding to the drive channels 11A and the dummy channels 12A in the A row are formed from the channels 11A and 12A to one edge 1c of the head chip 1,
- Each connection electrode 15B corresponding to the drive channel 11B and the dummy channel 12B extends from the inside of each channel 11B, 12B toward the A column side and is formed to the front of the A column channel column. Accordingly, all of the connection electrodes 15A and 15B extend in the same direction from the respective channels 11A, 11B, 12A, and 12B.
- the nozzle plate 2 is bonded to the front end surface 1a of the head chip 1 with an adhesive.
- nozzles 21 are opened only at positions corresponding to the drive channels 11A and 11B.
- the wiring substrate 3 is a flat substrate having a larger size than the rear end surface 1b of the head chip 1, and is formed in a bonding region (region indicated by a one-dot chain line in FIG. 2) that is bonded to the rear end surface 1b of the head chip 1.
- 32B are opened individually.
- the common ink chamber 51 is configured by an internal space of a box-type ink manifold 5 that is bonded to the back side (the side opposite to the head chip 1) of the wiring board 3, and passes through the through holes 32A and 32B to each drive channel 11A. , 11B is commonly supplied with ink. Accordingly, the drive channels 11A and 11B communicate with each other through the common ink chamber 51. On the other hand, the dummy channels 12 ⁇ / b> A and 12 ⁇ / b> B are blocked by the wiring board 3.
- wiring electrodes 33A and 33B electrically connected to the connection electrodes 15A and 15B arranged on the rear end surface 1b of the head chip 1 are formed by vapor deposition or sputtering.
- the wiring electrodes 33 ⁇ / b> A and 33 ⁇ / b> B extend on the surface of the wiring substrate 3 in a direction orthogonal to the channel row of the head chip 1.
- each wiring electrode 33A corresponding to the connection electrode 15A drawn from each channel 11A, 12A in the A row is located in the vicinity of each channel 11A, 12A in the A row in the bonding region 31, and the other end is It extends from the bonding region 31 toward the side perpendicular to the channel row of the head chip 1 and reaches the end 3 a of the wiring substrate 3.
- each wiring electrode 33B corresponding to the connection electrode 15B drawn from each channel 11B, 12B in the B row is located in the vicinity of each channel 11B, 12B in the B row in the junction region 31, and the other end is , Extending in the same direction as the wiring electrode 33 ⁇ / b> A and passing between adjacent through holes 32 ⁇ / b> A in the A row to the end 3 a of the wiring board 3.
- the wiring electrodes 33 ⁇ / b> A and 33 ⁇ / b> B are alternately arranged on the end portion 3 a of the wiring board 3.
- the wiring board 3 has a rear end surface 1b of the head chip 1 so that the connection electrodes 15A and 15B on the head chip 1 side and the wiring electrodes 33A and 33B on the wiring board 3 side are electrically connected correspondingly. And bonded with a predetermined pressing force (for example, 1 MPa or more) with an adhesive.
- a predetermined pressing force for example, 1 MPa or more
- an adhesive an anisotropic conductive adhesive containing conductive particles can be used, but it is preferable to use an adhesive containing no conductive particles in order to increase the reliability of short circuit prevention. .
- This ink jet head H is mounted on the carriage 400 of the ink jet recording apparatus 100 so that the column direction of the channel line is along the Y direction in FIG. 1, and as shown in FIG. Electrically connected.
- a drive signal corresponding to the image data transmitted from the drive circuit in the drive device 500 is applied to the drive electrode 14 of each drive channel 11 via the FPC 4, the partition wall 13 is sheared and deformed. The volume is changed, and pressure for ejection is applied to the ink in the drive channel 11.
- FIG. 5 shows an example of a drive signal given to the ink jet head H in order to eject ink.
- This drive signal is a rectangular wave composed of a positive voltage (+ V) having a pulse width PW that generates a negative pressure in the channel.
- FIG. 6 shows only one drive channel 11 and two dummy channels 12 adjacent to each other in one channel row of the inkjet head H, and two partition walls 13 between them.
- the pulse width PW which is the duration of the positive voltage of the drive signal
- the range is 0.8 AL or more and 1.2 AL or less.
- AL Acoustic Length
- AL measures the velocity of a droplet discharged when a rectangular wave driving signal is applied to the driving electrode 14 and changes the rectangular wave pulse width PW while keeping the rectangular wave voltage value constant. It is determined as the pulse width that maximizes the droplet flight speed.
- a pulse is a rectangular wave having a constant voltage peak value.
- a pulse width PW is a 10% rise of the voltage from 0V and a peak value voltage. It is defined as the time between 10% of the fall from.
- the rectangular wave refers to a waveform in which both the rise time and fall time between 10% and 90% of the voltage are within 1 ⁇ 2 of AL, preferably within 1 ⁇ 4.
- the driving device 500 divides all channel rows of the inkjet head H into N driving groups.
- N is an integer of 2 or more.
- the drive group is a group in units of channel columns having the drive channels 11 to which drive signals are applied from the drive device 500 at the same timing within the drive cycle T of the inkjet head H. Therefore, each drive channel 11 and each dummy channel 12 in the same channel row are included in the same drive group.
- the column is designated as drive group B, and is divided into two different drive groups.
- the drive signal applied to the drive electrode 14 of each drive channel 11 constituting the drive group A from the drive device 500 to the inkjet head H and the drive signal 14 applied to each drive channel 11 constituting the drive group B are applied.
- a phase difference of nAL + t is given to the drive signal as shown in the timing chart of FIG.
- a case where a drive signal is applied in each drive cycle T of the drive group A and the drive group A is driven before the drive group B is shown.
- n is an integer of 1 or more, and AL is 1/2 of the acoustic resonance period of the pressure wave in the drive channel 11 as described above.
- t is the pressure wave transmission time obtained by “the distance between nozzles between drive groups” / “the speed at which sound travels through the ink”.
- the speed C at which sound travels through the ink can be calculated by the following formula.
- K is the bulk modulus of the ink and ⁇ is the density of the ink.
- This speed C is a value unique to ink.
- the drive channels 11A and 11B of the drive groups A and B share the common ink chamber. 51, the droplet velocity may fluctuate greatly due to the influence of crosstalk.
- droplets are first ejected from the drive channel 11A of the drive group A, and then droplets are ejected from the drive channel 11B of the drive group B after a predetermined delay time has elapsed.
- the droplet speed ejected from the drive channel 11B of the drive group B is on the plus side and minus side according to the delay time with respect to the droplet speed ejected from the drive channel 11A of the drive group A. We found that it fluctuates periodically.
- this cycle repeats inversion positively or negatively every 1 AL.
- the drive channel 11B of the drive group B From the driving channel 11A of the driving group A was almost the same as the droplet speed from the driving channel 11A. Therefore, the present inventor examined the time lag of this cycle, and ascertained that the cycle started after the elapse of t time after the droplet discharge of the drive group A.
- the droplet velocity from the drive channel 11B of the drive group B after the lapse of nAL + t is equal to the droplet discharged from the drive channel 11A of the drive group A previously discharged. It was found that the speed was almost the same as the speed.
- an inkjet head having a plurality of channel rows usually starts ejection at different time timings in order to adjust the landing position due to the difference in physical nozzle position between adjacent channel rows.
- the recording medium P and the inkjet head H are relative to each other after the first row (for example, the drive group A) starts ejection.
- the nozzles 21 in the second row (drive group B) reach the physical position where the nozzles 21 in the first row existed at the start of discharge, and the discharge in the second row is started from that moment. Will be.
- each drive channel 11 normally discharges at the same drive timing, and only the start time and end time differ for each channel row.
- the phase difference of nAL + t between the drive groups is the difference between the start time and the end time due to the landing position adjustment due to the difference in physical nozzle position between the drive groups (landing position adjustment period between the drive groups).
- Delay time that does not include That is, as shown in FIG. 10, the delay time provided in the period in which the two drive groups to which the phase difference is applied is driven together is shown, and between the different drive groups A and B in the period in which the drive group is driven together.
- the timing at which the droplets are ejected is different because the phase difference of nAL + t is given to the application timing of the drive signal.
- N is an integer of 2 or more
- FIG. 11 shows a case where there are four channel columns.
- all the channel columns are divided into two drive groups A and B, and the adjacent channel columns have different drive groups from the top in the figure.
- the drive groups are grouped so that they alternate in the order of A, B, A, and B.
- D ' is equal to D or large enough to sufficiently attenuate the pressure wave.
- FIG. 13 shows a case where there are six channel columns.
- all channel columns are divided into three drive groups, and driving is performed from the top in the figure so that adjacent channel columns have different drive groups.
- the groups are grouped so that the groups alternate in the order of A, B, C, A, B, and C.
- D ' is equal to D or large enough to sufficiently attenuate the pressure wave.
- n 1AL + t
- n of the phase difference nAL + t between the drive groups is all the same value.
- the drive groups When there are three or more channel rows, it is preferable to divide the drive groups so that the adjacent channel rows are different. Since channel columns belonging to at least one different drive group are arranged between channel columns belonging to the same drive group, the separation distance of the same drive group is increased, and crosstalk between the same drive groups is increased. Can be reduced.
- all the channel rows of the inkjet head H are not limited to those driven by a common drive circuit in the drive device 500, but have two or more drive circuits in the drive device 500. Each may be driven by a circuit. In this case, it is preferable that the drive groups have different drive circuits in the same channel row.
- FIG. 15 shows an example in which four channel rows are driven by two rows by two drive circuits 501 and 502 in the drive device 500.
- the two channel columns driven by the drive circuit 501 are divided into different drive groups A and B
- the two channel columns driven by the drive circuit 502 are divided into different drive groups A and B.
- a drop in droplet speed can be reduced. This is because the load on the drive circuit is reduced by reducing the number of drive channels that are simultaneously driven by one drive circuit, and the waveform dullness of the drive signal can be reduced.
- a rectangular wave composed of a positive voltage (+ V) having a pulse width PW that generates a negative pressure in the channel 12 is exemplified as the drive signal.
- the drive signal in the present invention is limited to such a signal. Any drive signal may be used as long as it is a discharge signal for discharging droplets.
- the head chip 1 of the inkjet head H a so-called harmonica type head chip having a hexahedron shape disposed on the opposite end surfaces of the channel inlet and outlet is illustrated.
- the entrance of the drive channel 11 is arranged on the same plane of the rear end face 1 b in all the channel rows, and the common ink chamber 51 is arranged on the entrance side of the drive channel 11.
- the head chip structure in the present invention is not necessarily limited to such a structure, and any pressure chamber may be used as long as the pressure chambers between the plurality of pressure chambers communicate with each other through a common ink chamber.
- the ink jet recording apparatus performs recording by ejecting liquid droplets in the process of scanning and moving the ink jet head H in the width direction (main scanning direction) of the recording medium P.
- the inkjet head H is constituted by a line-shaped inkjet head fixed across the width direction of the recording medium P, and droplets are ejected from the nozzles 21 in the process of moving the recording medium P along the Y direction in FIG. May be recorded.
- the channel rows of the inkjet head H are arranged along the X-X ′ direction in FIG.
- the two channel rows of this inkjet head are driven by the same drive circuit.
- the ink used for this inkjet head had a viscosity of 10 mPa ⁇ s, a surface tension of 32 mN / s, and the speed at which sound was transmitted through the ink was 1300 m / s.
- t 0.9 ( ⁇ s) was calculated from this calculated value.
- the drive signal applied from the drive device to each drive channel was a rectangular wave consisting only of the positive voltage (+ V) shown in FIG.
- the four channel rows of this inkjet head are driven by two drive circuits as shown in FIG.
- the ink used for this ink jet head had a viscosity of 5.7 mPa ⁇ s, a surface tension of 41 mN / s, and the speed at which sound was transmitted through the ink was 1600 m / s.
- the driving signal was the same as in Example 1.
- crosstalk and driving load were evaluated. The results are shown in Table 2.
- H Inkjet head 1: Head chip 1a: Front end surface 1b: Rear end surface 1c: Edge 11, 11, A, 11B: Drive channel (pressure chamber) 12, 12A, 12B: Dummy channel 13, 13A, 13B: Partition wall (pressure applying means) 14: Drive electrode 15A, 15B: Connection electrode 2: Nozzle plate 21: Nozzle 3: Wiring substrate 3a: End 31: Joining region 32A, 32B: Through hole 33A, 33B: Wiring electrode 4: FPC 5: Ink manifold 51: Common ink chamber 100: Inkjet recording apparatus 200: Conveying mechanism 201: Conveying roller pair 202: Conveying motor 203: Conveying roller 300: Guide rail 400: Carriage 500: Driving device 501, 502: Driving circuit
Landscapes
- Particle Formation And Scattering Control In Inkjet Printers (AREA)
- Ink Jet (AREA)
Abstract
ヘッド構造を何ら変更することなく、共通インク室を介して連通している複数の圧力室の列間で発生するクロストークと駆動負荷とを同時に低減することができるインクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置の提供を目的とし、駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の圧力室同士が共通インク室によって連通しており、圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、圧力室の圧力付与手段に印加する駆動信号に、異なる駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間)の位相差を与える。
Description
本発明はインクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置に関し、詳しくは、2列以上の圧力室の列の圧力室同士が共通インク室によって連通しているインクジェットヘッドにおけるクロストークの影響を低減できるインクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置に関する。
圧力付与手段の動作によって圧力室内に圧力を発生させ、該圧力室内のインクをノズルから吐出するインクジェットヘッドは、より高速で高精細な記録が求められており、ノズル数、ノズル列数はますます増加する傾向にある。これに伴い、吐出の際に圧力室内で発生した圧力波が他の圧力室に伝播して液滴速度(液滴量)を不安定にするクロストークの増大及び多数の圧力室を同時に駆動することによる駆動負荷の増大が問題となっている。
クロストークによる液滴速度の不安定化は、吐出の際に圧力室内で発生した圧力波が、圧力室の入口側から共通インク室に伝播し、共通インク室を介して他の圧力室に影響を及ぼすことによって発生する。特に、圧力室の列を2列以上有し、各圧力室の列の圧力室同士が共通インク室によって連通しているインクジェットヘッドの場合、圧力波は共通インク室を介して他の圧力室の列の各圧力室にも伝播するため、圧力室の列間でのクロストークを抑制することが重要である。
このクロストークの問題に関し、特許文献1には、共通インク室を分離壁によって圧力室の列間に沿って二分し、一方の圧力室の列から他方の圧力室の列への圧力波の伝播を防止することが記載されている。
また、特許文献2には、圧力室の入口に対向する共通インク室の壁面を所定の体積弾性率以下のものに規定することにより、共通インク室内に伝播した圧力波を減衰させてクロストークを低減することが記載されている。
一方、駆動負荷の問題に関し、特許文献3には、ノズル列間のノズルピッチを最小画素ピッチの整数倍からずらして配置し、そのずれ量に応じて駆動信号の位相をずらして各ノズル列からの液滴が画像の格子点に着弾するように調整することで、駆動回路の負荷を抑えることが記載されている。
また、特許文献4には、圧電素子を充電する充電電流または放電する放電電流のピーク値がチャネル間で重ならないように、所定のディレイ時間だけ駆動信号の位相をずらすことで、低電力化を図ることが記載されている。このディレイ時間は、圧電素子の静電容量と充電抵抗とで定められる立ち上げ時間と等しいものであるとされている。
特許文献1、2に記載の技術では、圧力室の列間のクロストークを低減するためにインクジェットヘッド構造そのものの変更が必要となる問題がある。特に特許文献1のように共通インク室内に分離壁を設ける場合、ヘッド構造が複雑化するためにコスト増となる問題がある。しかも、圧力室の列数の増加に伴って分離壁も増設しなくてはならず、インク供給系が複雑となってヘッドの取扱いが難しくなる問題もある。
一方、駆動負荷を抑制する観点だけに着目すれば、特許文献3、4に記載のように駆動信号の位相をずらすことは有効であると考えられる。しかし、単に駆動信号の位相をずらしても吐出時に発生した圧力波が共通インク室を介して他の圧力室に影響を及ぼすことに変わりはない。これら特許文献3、4には、圧力室の列間で発生するクロストークを低減することについては一切言及されていない。
そこで、本発明者は、共通インク室を介して連通している圧力室の列間のクロストークと駆動負荷の問題について鋭意検討したところ、駆動負荷を低減するために圧力室の列間で単に駆動信号の位相をずらすだけでなく、特定の位相差を与えることにより、クロストークと駆動負荷の問題を同時に解決できることを見出した。
すなわち、本発明は、ヘッド構造を何ら変更することなく、共通インク室を介して連通している複数の圧力室の列間で発生するクロストークと駆動負荷とを同時に低減することができるインクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置を提供することを課題とする。
本発明の他の課題は、以下の記載により明らかとなる。
1.駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドの駆動方法であって、
前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動方法。
前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動方法。
2.隣接する前記圧力室の列を、異なる駆動グループに分割する前記1記載のインクジェットヘッドの駆動方法。
3.前記圧力室の列は、2以上の駆動回路によって駆動され、
前記駆動回路が同じ前記圧力室の列を、異なる駆動グループに分割する前記1記載のインクジェットヘッドの駆動方法。
前記駆動回路が同じ前記圧力室の列を、異なる駆動グループに分割する前記1記載のインクジェットヘッドの駆動方法。
4.前記インクジェットヘッドは、前記圧力室の入口と出口とが相反する端面にそれぞれ開口し、前記圧力室が前記入口から前記出口にかけてストレート状に形成されたヘッドチップを有し、前記ヘッドチップにおける前記圧力室の入口側に前記共通インク室が配置されたインクジェットヘッドである前記1、2又は3記載のインクジェットヘッドの駆動方法。
5.駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドの駆動装置であって、
前記インクジェットヘッドの前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「インク中を伝わる音速値」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動装置。
前記インクジェットヘッドの前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「インク中を伝わる音速値」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動装置。
6.隣接する前記圧力室の列は、異なる駆動グループに分割される前記5記載のインクジェットヘッドの駆動装置。
7.前記圧力室の列を駆動する2以上の駆動回路を有し、
前記駆動回路が同じ前記圧力室の列は、異なる駆動グループに分割される前記5記載のインクジェットヘッドの駆動装置。
前記駆動回路が同じ前記圧力室の列は、異なる駆動グループに分割される前記5記載のインクジェットヘッドの駆動装置。
8.前記インクジェットヘッドは、前記圧力室の入口と出口とが相反する端面にそれぞれ開口し、前記圧力室が前記入口から前記出口にかけてストレート状に形成されたヘッドチップを有し、前記ヘッドチップにおける前記圧力室の入口側に前記共通インク室が配置されたインクジェットヘッドである前記5、6又は7記載のインクジェットヘッドの駆動装置。
9.駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドと、
前記5~8のいずれかに記載のインクジェットヘッドの駆動装置とを備えるインクジェット記録装置。
前記5~8のいずれかに記載のインクジェットヘッドの駆動装置とを備えるインクジェット記録装置。
以下、本発明の実施の形態について図面を用いて説明する。
図1は、本発明に係るインクジェット記録装置の一例を示す概略構成図である。
インクジェット記録装置100において、記録媒体Pは、搬送機構200の搬送ローラー対201に挟持され、更に、搬送モーター202によって回転駆動される搬送ローラー203により図示Y方向(副走査方向)に搬送されるようになっている。
搬送ローラー203と搬送ローラー対201の間には、記録媒体Pの記録面PSと対向するようにインクジェットヘッドHが設けられている。このインクジェットヘッドHは、記録媒体Pの幅方向に亘って掛け渡されたガイドレール300に沿って、不図示の駆動手段によって、記録媒体Pの搬送方向(副走査方向)と略直交する図示X-X’方向(主走査方向)に沿って往復移動可能に設けられたキャリッジ400に、ノズル面側が記録媒体Pの記録面PSと対向するように配置されて搭載されており、詳細については後述するように、FPC4を介して駆動装置500と電気的に接続されている。
インクジェットヘッドHは、キャリッジ400の主走査方向の移動に伴って記録媒体Pの記録面PSを図示X-X’方向に走査移動し、この走査移動の過程でノズルから液滴を吐出することによって所望のインクジェット画像を記録する。
次に、本発明において好ましく用いられるインクジェットヘッドHの一例を図2~図4に示す。図2はインクジェットヘッドの分解斜視図、図3はそのヘッドチップの部分背面図、図4はヘッドチップの部分断面図である。
図中、1はいわゆるハーモニカ型のヘッドチップ、2はノズルプレート、3は配線基板、4はFPC、5はインクマニホールドである。
ヘッドチップ1は六面体形状を呈し、チャネルが複数配列されたチャネル列を2列有している。ここでは図3中の下側のチャネル列をA列、上側のチャネル列をB列とする。このヘッドチップ1は、チャネルとして、圧力室であるインクが吐出される駆動チャネル11と、インクが吐出されないダミーチャネル12とを有し、駆動チャネル11のみからインクが吐出されることによって記録を行う独立駆動タイプのヘッドチップである。
以下、A列の駆動チャネルを11A、B列の駆動チャネルを11B、A列のダミーチャネルを12A、B列のダミーチャネルを12Bという場合がある。
各チャネル列は、それぞれ駆動チャネル11A、11Bとダミーチャネル12A、12Bとが交互に配置されている。隣接する駆動チャネル11A又は11Bとダミーチャネル12A、12Bとの間は、PZT等の圧電素子からなる圧力付与手段である隔壁13となっている。
以下、A列の隔壁を13A、B列の隔壁を13Bという場合がある。
各駆動チャネル11A、11Bと各ダミーチャネル12A、12Bは、ヘッドチップ1の前端面1aと後端面1bとにそれぞれ開口しており、その内面には駆動電極14がそれぞれ密着形成されている。駆動チャネル11A、11B及びダミーチャネル12A、12Bは、その入口と出口がヘッドチップ1の相反する端面である前端面1aと後端面1bにそれぞれが開口しており、入口から出口にかけてストレート状に形成されている。
なお、同図に示すインクジェットヘッドHにおいて、ヘッドチップ1からインクが吐出される側の端面を「前端面」といい、その反対側の端面を「後端面」という。
ヘッドチップ1の後端面1bには、駆動チャネル11A、11B及びダミーチャネル12A、12Bの各駆動電極13A、13Bと導通する接続電極15A、15Bがそれぞれ形成されている。各接続電極15A、15Bの一端は、対応する駆動チャネル11A、11B又はダミーチャネル12A、12B内の駆動電極13A、13Bと導通している。他端は、A列の駆動チャネル11A及びダミーチャネル12Aに対応する各接続電極15Aにおいては、各チャネル11A、12A内からヘッドチップ1の一方の端縁1cにかけて形成されているが、B列の駆動チャネル11B及びダミーチャネル12Bに対応する各接続電極15Bにおいては、各チャネル11B、12B内からA列側に向けて延び、該A列のチャネル列の手前までにかけて形成されている。従って、接続電極15A、15Bのいずれも、各チャネル11A、11B、12A、12Bから同一方向に向けて延びている。
ノズルプレート2は、ヘッドチップ1の前端面1aに接着剤によって接合されている。ノズルプレート2には、各駆動チャネル11A、11Bに対応する位置のみにノズル21が開設されている。
配線基板3は、ヘッドチップ1の後端面1bよりも大判な平板状の基板であり、ヘッドチップ1の後端面1bと接合する接合領域(図2中の一点鎖線で示される領域)31内には、ヘッドチップ1の後端面1bに開口する駆動チャネル11A、11Bに対応する位置のみに、インクマニホールド5の共通インク室51から各駆動チャネル11A、11B内にインクを供給するための貫通穴32A、32Bが個別に開設されている。
共通インク室51は、配線基板3の背面側(ヘッドチップ1と反対面側)に接着される箱型のインクマニホールド5の内部空間によって構成され、貫通穴32A、32Bを通って各駆動チャネル11A、11Bに共通にインクを供給するようになっている。従って、各駆動チャネル11A、11Bは、この共通インク室51を介して連通している。一方、ダミーチャネル12A、12Bは配線基板3によって塞がれている。
配線基板3の表面には、ヘッドチップ1の後端面1bに配列されている各接続電極15A、15Bと電気的に接続される配線電極33A、33Bが、蒸着又はスパッタリング等によって形成されている。配線電極33A、33Bは、配線基板3の表面上においてヘッドチップ1のチャネル列と直交する方向に延びている。
A列の各チャネル11A、12Aから引き出される接続電極15Aに対応する各配線電極33Aは、一端が、接合領域31内のA列の各チャネル11A、12Aの近傍に位置し、他端が、該接合領域31からヘッドチップ1のチャネル列と直交する側方に向けて延び、配線基板3の端部3aに至っている。
一方、B列の各チャネル11B、12Bから引き出される接続電極15Bに対応する各配線電極33Bは、一端が、接合領域31内のB列の各チャネル11B、12Bの近傍に位置し、他端が、配線電極33Aと同一方向に向けて延び、A列の隣接する貫通穴32Aの間を通って配線基板3の端部3aに至っている。配線電極33Aと33Bは、配線基板3の端部3aに交互に配列されている。
この配線基板3は、ヘッドチップ1側の各接続電極15A、15Bと配線基板3側の各配線電極33A、33Bとが対応して電気的に接続するように、該ヘッドチップ1の後端面1bに貼り合わされ、接着剤によって所定の押圧力(例えば1MPa以上)で接合されている。接着剤としては、導電性粒子を含む異方性導電性接着剤を使用することもできるが、ショート防止の確実性を高めるためにも、導電性粒子を含まない接着剤を使用することが好ましい。
このインクジェットヘッドHは、チャネル列の列方向が、図1中のY方向に沿うようにインクジェット記録装置100のキャリッジ400に搭載され、図1に示したように、FPC4を介して駆動装置500と電気的に接続される。そして、駆動装置500内の駆動回路から送信される画像データに応じた駆動信号がFPC4を介して各駆動チャネル11の駆動電極14に印加されると、隔壁13がせん断変形して駆動チャネル11の容積を変化させ、駆動チャネル11内のインクに吐出のための圧力が付与される。
図5はインクを吐出するためにインクジェットヘッドHに与えられる駆動信号の一例を示している。この駆動信号はチャネル内に負の圧力を発生させるパルス幅PWの正電圧(+V)からなる矩形波である。
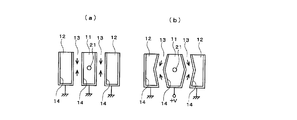
この駆動信号によるインクの吐出動作について図6を参照して説明する。図6はインクジェットヘッドHの1つのチャネル列における1つの駆動チャネル11及びその両隣の2つのダミーチャネル12と、それらの間の2つの隔壁13のみを示している。
いま、図6(a)に示すように、各チャネル11、12間の隔壁13がいずれも中立状態にあるとき、中央の駆動チャネル11の駆動電極14に図5に示す駆動信号を印加すると、図6(b)に示すように、隔壁13を形成する圧電素子の分極方向(図中矢印で示す。)に直角な方向の電界が生じ、両隔壁13が互いに外側に向けてせん断変形し、駆動チャネル11の容積を拡大させる。この隔壁13の変形により駆動チャネル11内にインクが流れ込む。この状態を所定のパルス幅PWだけ維持した後、駆動信号が0電位に戻されると、駆動チャネル11内のインクに圧力が掛かり、ノズル21から液滴が吐出される。
隔壁13の外側に向けた変形によって生じた駆動チャネル11内の圧力は、負から正へ、正から負へと1AL毎に反転を繰り返す。このため、効率良く液滴を吐出するためには、駆動信号の正電圧の継続時間であるパルス幅PWは、駆動チャネル11内の圧力が負から正に転じる1AL近傍とすることが好ましく、具体的には0.8AL以上1.2AL以下の範囲とすることが好ましい。
ここで駆動信号の継続時間を示すAL(Acoustic Length)とは、チャネル12における圧力波の音響的共振周期の1/2のことである。ALは、駆動電極14に矩形波の駆動信号を印加した際に吐出される液滴の速度を測定し、矩形波の電圧値を一定にして矩形波のパルス幅PWを変化させたときに、液滴の飛翔速度が最大になるパルス幅として求められる。
また、パルスとは、一定電圧波高値の矩形波であり、0Vを0%、波高値電圧を100%とした場合に、パルス幅PWとは、電圧の0Vからの立ち上がり10%と波高値電圧からの立ち下がり10%との間の時間として定義する。
更に、矩形波とは、電圧の10%と90%との間の立ち上がり時間、立ち下がり時間のいずれもがALの1/2以内、好ましくは1/4以内であるような波形を指す。
次に、本発明において駆動装置500からインクジェットヘッドHに対して駆動信号を印加する方法について説明する。
本発明において、駆動装置500はインクジェットヘッドHが有する全チャネル列をN個の駆動グループに分割している。Nは2以上の整数である。
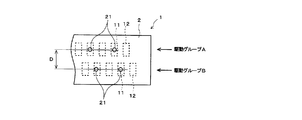
駆動グループとは、インクジェットヘッドHの駆動周期T内において駆動装置500から駆動信号を同一タイミングで印加する駆動チャネル11を有するチャネル列を単位とするグループのことである。従って、同一チャネル列内の各駆動チャネル11及び各ダミーチャネル12は同一の駆動グループに含まれる。但し、同一の駆動グループが複数のチャネル列によって構成されていてもよい。図1、図2に示すインクジェットヘッドHは、2列のチャネル列を有するため、ここではN=2として、図7に示すようにA列のチャネル列が駆動グループAとされ、B列のチャネル列が駆動グループBとされて、2個の異なる駆動グループに分割されている。
なお、インクジェットヘッドHにおける同一駆動グループの駆動チャネル11は、全て同時に駆動する。
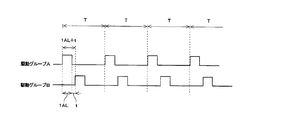
インクジェットヘッドHに対して駆動装置500から駆動グループAを構成する各駆動チャネル11の駆動電極14に印加される駆動信号と、駆動グループBを構成する各駆動チャネル11の駆動電極14に印加される駆動信号との間に、図8のタイミングチャートに示すように、nAL+tの位相差を与える。ここでは駆動グループAの各駆動周期Tに駆動信号が印加され、駆動グループBよりも駆動グループAを先に駆動する場合を示している。
なお、nは1以上の整数、ALは上記の通り駆動チャネル11における圧力波の音響的共振周期の1/2である。図8ではn=1の場合を例示している。
また、tは「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間である。
この「駆動グループ間のノズル間距離」における駆動グループ間とは、本発明において位相差を持って駆動される対象となる2つの異なる駆動グループ間のことである。図7のように2列のチャネル列を有する場合、この駆動グループ間のノズル間距離は、図7中にDで示される距離となる。
音がインク中を伝わる速度Cは、下記式で算出することができる。

Kはインクの体積弾性率、ρはインクの密度である。この速度Cは、インク固有の値である。
ここで、駆動グループA、Bのそれぞれの駆動チャネル11A、11Bの駆動電極14に駆動信号を印加して液滴を吐出させると、駆動グループA、Bの駆動チャネル11A、11B同士は共通インク室51によって連通しているため、クロストークの影響によって液滴速度が大きく変動することがある。しかし、本発明者が実験したところによると、先に例えば駆動グループAの駆動チャネル11Aから液滴を吐出し、次いで所定のDelay時間経過後に駆動グループBの駆動チャネル11Bから液滴を吐出するように駆動する場合、駆動グループAの駆動チャネル11Aから吐出される液滴速度に対して、駆動グループBの駆動チャネル11Bから吐出される液滴速度は、Delay時間に応じてプラス側及びマイナス側に周期的に変動することを見出した。
この周期は、図9に示すように駆動グループAの液滴吐出時から若干のタイムラグをおいた後、1AL毎にプラス又はマイナスに反転を繰り返しており、この反転時に駆動グループBの駆動チャネル11Bからの液滴速度が、駆動グループAの駆動チャネル11Aからの液滴速度とほぼ同速度となるものであった。そこで、本発明者は、この周期のタイムラグについて検討したところ、駆動グループAの液滴吐出後に、上記したt時間経過してから周期が始まっていることを突き止めた。すなわち、駆動グループAの駆動チャネル11Aからの液滴吐出後、nAL+t経過後の駆動グループBの駆動チャネル11Bからの液滴速度は、先に吐出される駆動グループAの駆動チャネル11Aからの液滴速度とほぼ同速度となるものであることがわかった。
このため、この駆動方法、駆動装置500及びこれを備えたインクジェット記録装置100によれば、駆動グループA、Bに対してそれぞれ印加する各駆動信号に、このnAL+tの位相差を付与することで、インクジェットヘッドHのヘッド構造に全く変更を加える必要なく、共通インク室51を共通にする駆動グループA、B間でのクロストークの影響を実質的に無視することができ、チャネル列間での液滴速度の変動を抑えることが可能となる。しかも、各駆動グループA、B間で駆動信号に位相差が付与されるため、駆動負荷も抑えられる。
図9に示すように、後に駆動信号が印加される駆動グループの駆動チャネル11からの液滴速度は、t時間経過後1AL毎にプラス又はマイナスに反転するため、nは1以上の整数であればよい。しかし、後に駆動する駆動グループからの吐出のための駆動がその次の駆動周期Tにかからないようにする必要がある。また、nが大きくなりすぎると、異なる駆動グループ間の駆動タイミングが離れてプリント速度の低下を招くおそれがあるため、プリントの高速化の観点からは可及的に小さい値とすることが好ましく、n=1とすることが最も好ましい。
なお、複数のチャネル列を有するインクジェットヘッドは、通常、隣接するチャネル列間の物理的なノズル位置の違いによる着弾位置調整のため、予め異なる時間タイミングで吐出を始めている。例えば以上説明した2列のチャネル列を有するインクジェットヘッドHでは、図10に示すように、1列目(例えば駆動グループA)が吐出を開始してから、記録媒体PとインクジェットヘッドHとが相対的に移動して、吐出開始時に1列目の各ノズル21が存在した物理的位置に2列目(駆動グループB)の各ノズル21が到達し、その瞬間から2列目の吐出が開始されることになる。この場合でも、通常各駆動チャネル11は同じ駆動タイミングで吐出を行っており、チャネル列毎に開始時間と終了時間が異なるにすぎない。
本発明にいう駆動グループ間のnAL+tの位相差は、このように駆動グループ間の物理的なノズル位置の違いによる着弾位置調整による開始時間及び終了時間の差(駆動グループ間の着弾位置調整期間)を含まないDelay時間のことである。すなわち、図10に示すように、位相差を付与する対象となる2つの駆動グループが共に駆動する期間において設けられるDelay時間を示し、その駆動グループが共に駆動する期間における異なる駆動グループA、B間で駆動信号の印加タイミングにnAL+tの位相差が付与されることで、液滴が吐出されるタイミングそのものが異なるものである。
駆動グループA、B間にnAL+tの位相差が付与されることで、厳密には駆動グループA、B間で着弾位置調整が必要となる問題があるが、この問題は記録媒体PとインクジェットヘッドHの相対的な移動速度を調整することで解決できる。
以上の説明では、チャネル列が2列の場合であるが、本発明においてチャネル列は複数列であればよく、その複数のチャネル列をN個(Nは2以上の整数)の駆動グループに分割することで、上記同様に構成することができる。
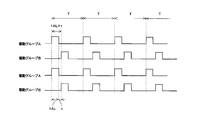
図11は4列のチャネル列を有する場合を示しており、ここでは全チャネル列を2つの駆動グループA、Bに分割し、隣接するチャネル列で異なる駆動グループとなるように、図中上から駆動グループがA、B、A、Bの順に交互となるようにグループ分けしている。
このような実施の形態においては、D’はDと同等か圧力波が十分に減衰するほど大きいことが好ましい。
このときの駆動信号の印加タイミングは、図12に示すように、異なる駆動グループA、B間で1AL+t(n=1とした場合)の位相差が付与されることで、各駆動グループA、B間での液滴速度の変動の抑制と駆動負荷の低減化を図ることができる。
また、図13は6列のチャネル列を有する場合を示しており、ここでは全チャネル列を3つの駆動グループに分割し、隣接するチャネル列で異なる駆動グループとなるように、図中上から駆動グループがA、B、C、A、B、Cの順に交互となるようにグループ分けしている。
このような実施の形態においては、D’はDと同等か圧力波が十分に減衰するほど大きいことが好ましい。
このときの駆動信号の印加タイミングは、図14に示すように、それぞれ隣接する異なる駆動グループA、B間及び駆動グループB、C間で1AL+t(n=1とした場合)の位相差が付与されることで、各駆動グループA、B、C間での液滴速度の変動の抑制と駆動負荷の低減化を図ることができる。
このように分割される駆動グループが3以上となる場合、駆動グループ間の位相差nAL+tのnは全て同じ値とすることが、プリント速度の低下を避ける観点から好ましい。
チャネル列が3列以上となる場合は、隣接するチャネル列で駆動グループを異ならせるように分割することが好ましい。同一の駆動グループに属するチャネル列の間に少なくとも1つの異なる駆動グループに属するチャネル列が配置されることになるため、同一の駆動グループの離間距離が大きくなり、同一の駆動グループ間でのクロストークの影響を低減することができる。
本発明において、インクジェットヘッドHの全てのチャネル列は、駆動装置500内の共通の駆動回路によって駆動されるものに限らず、駆動装置500内に駆動回路を2以上有し、この2以上の駆動回路によってそれぞれ駆動されるものであってもよい。この場合、駆動グループは、駆動回路が同じチャネル列で異ならせるようにすることが好ましい。
図15は、4列のチャネル列が、駆動装置500内の2つの駆動回路501、502によって2列ずつ駆動される例を示している。この場合、駆動回路501で駆動される2つのチャネル列を異なる駆動グループA、Bに分け、また、駆動回路502で駆動される2つのチャネル列を異なる駆動グループA、Bに分けている。このようにすると液滴速度の低下を低減することができる。その理由は、1つの駆動回路で同時に駆動する駆動チャネル数が減少することにより駆動回路への負荷が減少し、駆動信号の波形鈍りを低減することができるためである。
また、以上の説明では、駆動信号としてチャネル12内に負の圧力を発生させるパルス幅PWの正電圧(+V)からなる矩形波を例示したが、本発明における駆動信号はこのようなものに限定されず、液滴を吐出するための駆動信号であればどのようなものであってもよい。
更に、以上の説明では、インクジェットヘッドHのヘッドチップ1として、チャネルの入口と出口が相反する端面に配置された六面体形状を呈するいわゆるハーモニカ型のヘッドチップを例示した。このようなヘッドチップ1は、全てのチャネル列において駆動チャネル11の入口が後端面1bの同一平面上に配置され、この駆動チャネル11の入口側に共通インク室51が配置されるため、クロストークの影響が比較的大きく、液滴速度の変動が生じ易いことから、本発明の適用によって顕著な効果が得られるために好ましい態様である。しかし、本発明におけるヘッドチップ構造は必ずしもこのようなものに限定されず、複数の圧力室の列間の圧力室同士が共通インク室によって連通しているものであればよい。
また、本発明におけるインクジェット記録装置は、以上説明したように、インクジェットヘッドHを記録媒体Pの幅方向(主走査方向)に亘って走査移動させる過程で液滴を吐出して記録を行うものに限らず、インクジェットヘッドHが記録媒体Pの幅方向に亘って固定されたライン状のインクジェットヘッドによって構成され、記録媒体Pを図1中のY方向に沿って移動させる過程でノズル21から液滴を吐出して記録を行うものであってもよい。この場合、インクジェットヘッドHのチャネル列は図1中のX-X’方向に沿って配置される。
以下、実施例によって本発明の効果を例証する。
(実施例1)
図2に示したインクジェットヘッドと同じ構造の2列のチャネル列を有するインクジェットヘッドを用意し、一方のチャネル列を駆動グループA、他方のチャネル列を駆動グループBとした。各チャネル列はそれぞれ256ノズル、チャネル列間のノズル間距離Dは1.128mm、AL=5.0μsであった。
図2に示したインクジェットヘッドと同じ構造の2列のチャネル列を有するインクジェットヘッドを用意し、一方のチャネル列を駆動グループA、他方のチャネル列を駆動グループBとした。各チャネル列はそれぞれ256ノズル、チャネル列間のノズル間距離Dは1.128mm、AL=5.0μsであった。
このインクジェットヘッドの2つのチャネル列は同一の駆動回路にて駆動が行われるものである。
このインクジェットヘッドに対して使用するインクは、粘度が10mPa・s、表面張力32mN/s、音がインク中を伝わる速度は1300m/sであった。
以上の条件から、「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間tの値は、1128(μm)/1300×106(μm/s)=0.87×10-6(s)=0.87(μs)であり、ここでは、この計算値からt=0.9(μs)とした。
駆動装置から各駆動チャネルに対して印加される駆動信号は、図5に示した正電圧(+V)のみからなる矩形波を使用した。パルス幅PWは1AL=5.0μs、駆動周期Tは100μsとした。なお、駆動信号は全チャネル列に対して共通の駆動装置から印加されるものとした。
このインクジェットヘッドを図1に示すインクジェット記録装置のキャリッジ上に搭載し、駆動グループA、B間の位相差(nAL+t)を、n=1とし、1×5.0+0.9=5.9μsとして、駆動グループAに先に駆動信号を印加するようにインクジェットヘッドを駆動した。
<クロストークの評価>
各駆動グループA、Bの各ノズルからそれぞれ吐出される液滴をカメラを用いて撮像し、得られた液滴像を画像処理することによって液滴速度を計算し、その結果からチャネル列毎の各ノズルの平均速度を求めた。得られた平均速度から、|駆動グループAの平均速度-駆動グループBの平均速度|を計算し、その計算値から駆動グループAの平均速度に対する変動比率(=計算値/駆動グループAの平均速度×100:単位%)を求め、以下の基準に従ってクロストークの影響を評価した。その結果を表1に示す。
◎:5%未満
○:5%以上10%未満
△:10%以上15%未満
×:15%以上
各駆動グループA、Bの各ノズルからそれぞれ吐出される液滴をカメラを用いて撮像し、得られた液滴像を画像処理することによって液滴速度を計算し、その結果からチャネル列毎の各ノズルの平均速度を求めた。得られた平均速度から、|駆動グループAの平均速度-駆動グループBの平均速度|を計算し、その計算値から駆動グループAの平均速度に対する変動比率(=計算値/駆動グループAの平均速度×100:単位%)を求め、以下の基準に従ってクロストークの影響を評価した。その結果を表1に示す。
◎:5%未満
○:5%以上10%未満
△:10%以上15%未満
×:15%以上
<駆動負荷>
インクジェットヘッドを駆動する際の駆動負荷について、nAL+t=0として全チャネル列に位相差を設けずに全駆動チャネルを駆動した際の電流値を100とし、それに対する比率(%)を求めた。駆動負荷の値は小さいほど好ましい。その結果を表1に示す。
インクジェットヘッドを駆動する際の駆動負荷について、nAL+t=0として全チャネル列に位相差を設けずに全駆動チャネルを駆動した際の電流値を100とし、それに対する比率(%)を求めた。駆動負荷の値は小さいほど好ましい。その結果を表1に示す。
(実施例2)
位相差(nAL+t)を、n=2として、2×5.0+0.9=10.9μsとした以外は実施例1と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。
位相差(nAL+t)を、n=2として、2×5.0+0.9=10.9μsとした以外は実施例1と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。
(比較例1)
実施例1と同一のインクジェットヘッドにおいて、駆動グループA、B間の位相差を全く設けず、nAL+t=0として、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。
実施例1と同一のインクジェットヘッドにおいて、駆動グループA、B間の位相差を全く設けず、nAL+t=0として、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。
(比較例2)
位相差(nAL+t)を、n=0.5、t=0として、0.5×5.0=2.5μsとした以外は実施例1と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。
位相差(nAL+t)を、n=0.5、t=0として、0.5×5.0=2.5μsとした以外は実施例1と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表1に示す。

(実施例3)
インクジェットヘッドのノズル列を図11に示したように4列としたインクジェットヘッドを用意し、全チャネル列を、隣接するチャネル列間で駆動グループが異なるように駆動グループA、Bの2つに分割した。各チャネル列はそれぞれ256ノズル、異なる駆動グループとなるチャネル列間のノズル間距離Dは0.846mm、AL=5.0μsであった。
インクジェットヘッドのノズル列を図11に示したように4列としたインクジェットヘッドを用意し、全チャネル列を、隣接するチャネル列間で駆動グループが異なるように駆動グループA、Bの2つに分割した。各チャネル列はそれぞれ256ノズル、異なる駆動グループとなるチャネル列間のノズル間距離Dは0.846mm、AL=5.0μsであった。
このインクジェットヘッドの4つのチャネル列は図15に示すように2つの駆動回路にて駆動が行われるものである。
このインクジェットヘッドに対して使用するインクは、粘度が5.7mPa・s、表面張力41mN/s、音がインク中を伝わる速度は1600m/sであった。
以上の条件から、「隣接する圧力室の列間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間tの値は、846(μm)/1600×106(μm/s)=0.53×10-6(s)=0.53(μs)であり、ここでは、この計算値からt=0.5(μs)とした。
駆動信号は、実施例1と同一とした。
駆動グループA、B間の位相差(nAL+t)を、n=1とし、1×5.0+0.5=5.5μsとして、駆動グループAに先に駆動信号を印加するようにインクジェットヘッドを駆動し、実施例1と同様にしてクロストーク及び駆動負荷を評価した。その結果を表2に示す。
(実施例4)
位相差(nAL+t)を、n=2として、2×5.0+0.5=10.5μsとした以外は実施例3と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。
位相差(nAL+t)を、n=2として、2×5.0+0.5=10.5μsとした以外は実施例3と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。
(比較例3)
実施例3と同一のインクジェットヘッドにおいて、駆動グループA、B間の位相差を全く設けず、nAL+t=0として、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。
実施例3と同一のインクジェットヘッドにおいて、駆動グループA、B間の位相差を全く設けず、nAL+t=0として、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。
(比較例4)
位相差(nAL+t)を、n=0.5、t=0として、0.5×5.0=2.5μsとした以外は実施例3と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。
位相差(nAL+t)を、n=0.5、t=0として、0.5×5.0=2.5μsとした以外は実施例3と同一にし、同様にクロストークと駆動負荷について評価した。その結果を表2に示す。

以上の結果から、いずれの実施例においても液滴速度の変動は抑制され、クロストークの影響が低減された。
H:インクジェットヘッド
1:ヘッドチップ
1a:前端面
1b:後端面
1c:端縁
11、11A、11B:駆動チャネル(圧力室)
12、12A、12B:ダミーチャネル
13、13A、13B:隔壁(圧力付与手段)
14:駆動電極
15A、15B:接続電極
2:ノズルプレート
21:ノズル
3:配線基板
3a:端部
31:接合領域
32A、32B:貫通穴
33A、33B:配線電極
4:FPC
5:インクマニホールド
51:共通インク室
100:インクジェット記録装置
200:搬送機構
201:搬送ローラー対
202:搬送モーター
203:搬送ローラー
300:ガイドレール
400:キャリッジ
500:駆動装置
501、502:駆動回路
1:ヘッドチップ
1a:前端面
1b:後端面
1c:端縁
11、11A、11B:駆動チャネル(圧力室)
12、12A、12B:ダミーチャネル
13、13A、13B:隔壁(圧力付与手段)
14:駆動電極
15A、15B:接続電極
2:ノズルプレート
21:ノズル
3:配線基板
3a:端部
31:接合領域
32A、32B:貫通穴
33A、33B:配線電極
4:FPC
5:インクマニホールド
51:共通インク室
100:インクジェット記録装置
200:搬送機構
201:搬送ローラー対
202:搬送モーター
203:搬送ローラー
300:ガイドレール
400:キャリッジ
500:駆動装置
501、502:駆動回路
Claims (9)
- 駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドの駆動方法であって、
前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「音がインク中を伝わる速度」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動方法。 - 隣接する前記圧力室の列を、異なる駆動グループに分割する請求項1記載のインクジェットヘッドの駆動方法。
- 前記圧力室の列は、2以上の駆動回路によって駆動され、
前記駆動回路が同じ前記圧力室の列を、異なる駆動グループに分割する請求項1記載のインクジェットヘッドの駆動方法。 - 前記インクジェットヘッドは、前記圧力室の入口と出口とが相反する端面にそれぞれ開口し、前記圧力室が前記入口から前記出口にかけてストレート状に形成されたヘッドチップを有し、前記ヘッドチップにおける前記圧力室の入口側に前記共通インク室が配置されたインクジェットヘッドである請求項1、2又は3記載のインクジェットヘッドの駆動方法。
- 駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドの駆動装置であって、
前記インクジェットヘッドの前記圧力室の列をN個(Nは2以上の整数)の駆動グループに分割し、前記圧力室の前記圧力付与手段に印加する前記駆動信号に、異なる前記駆動グループ間でnAL+t(但し、nは1以上の整数、ALは圧力室における圧力波の音響的共振周期の1/2、tは「駆動グループ間のノズル間距離」/「インク中を伝わる音速値」で求められる圧力波伝達時間)の位相差を与えるインクジェットヘッドの駆動装置。 - 隣接する前記圧力室の列は、異なる駆動グループに分割される請求項5記載のインクジェットヘッドの駆動装置。
- 前記圧力室の列を駆動する2以上の駆動回路を有し、
前記駆動回路が同じ前記圧力室の列は、異なる駆動グループに分割される請求項5記載のインクジェットヘッドの駆動装置。 - 前記インクジェットヘッドは、前記圧力室の入口と出口とが相反する端面にそれぞれ開口し、前記圧力室が前記入口から前記出口にかけてストレート状に形成されたヘッドチップを有し、前記ヘッドチップにおける前記圧力室の入口側に前記共通インク室が配置されたインクジェットヘッドである請求項5、6又は7記載のインクジェットヘッドの駆動装置。
- 駆動信号の印加により動作する圧力付与手段によって内部のインクをノズルから吐出させるための圧力を発生する圧力室の列を2列以上有し、各圧力室の列の前記圧力室同士が共通インク室によって連通しているインクジェットヘッドと、
請求項5~8のいずれかに記載のインクジェットヘッドの駆動装置とを備えるインクジェット記録装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014539766A JP6202002B2 (ja) | 2012-10-02 | 2013-10-01 | インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 |
| CN201380051194.1A CN104703801B (zh) | 2012-10-02 | 2013-10-01 | 喷墨头的驱动方法、喷墨头的驱动装置以及喷墨记录装置 |
| EP13843417.0A EP2905138B1 (en) | 2012-10-02 | 2013-10-01 | Driving method of inkjet head, driving apparatus of inkjet head, and inkjet recording apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-220398 | 2012-10-02 | ||
| JP2012220398 | 2012-10-02 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014054655A1 true WO2014054655A1 (ja) | 2014-04-10 |
Family
ID=50434979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/076735 WO2014054655A1 (ja) | 2012-10-02 | 2013-10-01 | インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2905138B1 (ja) |
| JP (1) | JP6202002B2 (ja) |
| CN (1) | CN104703801B (ja) |
| WO (1) | WO2014054655A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025524A1 (ja) * | 2013-08-22 | 2015-02-26 | コニカミノルタ株式会社 | インクジェット染色方法 |
| JP2016159573A (ja) * | 2015-03-04 | 2016-09-05 | セイコーエプソン株式会社 | 液体吐出装置、および、液体吐出装置の制御方法 |
| JPWO2015137497A1 (ja) * | 2014-03-14 | 2017-04-06 | コニカミノルタ株式会社 | インクジェット記録方法 |
| JP2017105170A (ja) * | 2015-12-08 | 2017-06-15 | 株式会社リコー | 液体を吐出する装置 |
| JP2020025916A (ja) * | 2018-08-10 | 2020-02-20 | 東芝テック株式会社 | 薬液吐出装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2546097B (en) | 2016-01-08 | 2020-12-30 | Xaar Technology Ltd | Droplet deposition head |
| GB2548859B (en) * | 2016-03-30 | 2019-12-04 | Xaar Technology Ltd | A droplet deposition apparatus |
| JP2018043365A (ja) * | 2016-09-12 | 2018-03-22 | 東芝テック株式会社 | インクジェットヘッド駆動装置及びインクジェットヘッド |
| CN108274913B (zh) * | 2017-12-05 | 2022-02-11 | 武汉璟丰科技有限公司 | 一种提高共享壁喷头直线度的自适应均分方法 |
| CN110861410B (zh) * | 2018-08-28 | 2021-11-19 | 东芝泰格有限公司 | 液体喷出装置以及图像形成装置 |
| JP2021146637A (ja) * | 2020-03-19 | 2021-09-27 | 東芝テック株式会社 | インクジェットヘッド及びインクジェットプリンタ |
| GB2616859A (en) * | 2022-03-21 | 2023-09-27 | Xaar Technology Ltd | Methods and apparatus for droplet deposition |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0569544A (ja) * | 1991-04-05 | 1993-03-23 | Ricoh Co Ltd | 液体噴射記録ヘツドの駆動方法 |
| JPH07125195A (ja) | 1993-06-16 | 1995-05-16 | Ricoh Co Ltd | インクジェットヘッドの駆動方法 |
| JPH10315451A (ja) * | 1997-05-19 | 1998-12-02 | Ricoh Co Ltd | インクジェット記録装置及びインクジェットヘッド駆動回路 |
| JP2002137388A (ja) | 2000-11-01 | 2002-05-14 | Konica Corp | インクジェットヘッド |
| JP2003011368A (ja) | 2001-07-04 | 2003-01-15 | Ricoh Co Ltd | インクジェットヘッド及びインクジェット記録装置 |
| JP2007168185A (ja) | 2005-12-20 | 2007-07-05 | Konica Minolta Holdings Inc | インクジェットヘッド |
| JP2012116040A (ja) * | 2010-11-30 | 2012-06-21 | Kyocera Corp | 記録装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000326511A (ja) * | 1999-05-18 | 2000-11-28 | Nec Corp | インクジェット記録ヘッドの駆動方法及びその回路 |
| JP4247043B2 (ja) * | 2002-06-28 | 2009-04-02 | 東芝テック株式会社 | インクジェットヘッドの駆動装置 |
| JP2005059440A (ja) * | 2003-08-14 | 2005-03-10 | Brother Ind Ltd | インクジェットヘッド記録装置、インクジェット記録方法及びプログラム |
| JP4543847B2 (ja) * | 2004-09-14 | 2010-09-15 | ブラザー工業株式会社 | ライン式インクジェットプリンタ |
| JP4935418B2 (ja) * | 2006-02-27 | 2012-05-23 | ブラザー工業株式会社 | インクジェット記録装置 |
| JP5334289B2 (ja) * | 2008-09-30 | 2013-11-06 | 富士フイルム株式会社 | 液滴吐出装置及び画像形成装置 |
| JP5709554B2 (ja) * | 2011-01-26 | 2015-04-30 | 京セラ株式会社 | インクジェットヘッド及び記録装置 |
-
2013
- 2013-10-01 WO PCT/JP2013/076735 patent/WO2014054655A1/ja active Application Filing
- 2013-10-01 JP JP2014539766A patent/JP6202002B2/ja active Active
- 2013-10-01 CN CN201380051194.1A patent/CN104703801B/zh active Active
- 2013-10-01 EP EP13843417.0A patent/EP2905138B1/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0569544A (ja) * | 1991-04-05 | 1993-03-23 | Ricoh Co Ltd | 液体噴射記録ヘツドの駆動方法 |
| JPH07125195A (ja) | 1993-06-16 | 1995-05-16 | Ricoh Co Ltd | インクジェットヘッドの駆動方法 |
| JPH10315451A (ja) * | 1997-05-19 | 1998-12-02 | Ricoh Co Ltd | インクジェット記録装置及びインクジェットヘッド駆動回路 |
| JP2002137388A (ja) | 2000-11-01 | 2002-05-14 | Konica Corp | インクジェットヘッド |
| JP2003011368A (ja) | 2001-07-04 | 2003-01-15 | Ricoh Co Ltd | インクジェットヘッド及びインクジェット記録装置 |
| JP2007168185A (ja) | 2005-12-20 | 2007-07-05 | Konica Minolta Holdings Inc | インクジェットヘッド |
| JP2012116040A (ja) * | 2010-11-30 | 2012-06-21 | Kyocera Corp | 記録装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015025524A1 (ja) * | 2013-08-22 | 2015-02-26 | コニカミノルタ株式会社 | インクジェット染色方法 |
| JPWO2015025524A1 (ja) * | 2013-08-22 | 2017-03-02 | コニカミノルタ株式会社 | インクジェット染色方法 |
| JPWO2015137497A1 (ja) * | 2014-03-14 | 2017-04-06 | コニカミノルタ株式会社 | インクジェット記録方法 |
| JP2016159573A (ja) * | 2015-03-04 | 2016-09-05 | セイコーエプソン株式会社 | 液体吐出装置、および、液体吐出装置の制御方法 |
| JP2017105170A (ja) * | 2015-12-08 | 2017-06-15 | 株式会社リコー | 液体を吐出する装置 |
| JP2020025916A (ja) * | 2018-08-10 | 2020-02-20 | 東芝テック株式会社 | 薬液吐出装置 |
| JP7149765B2 (ja) | 2018-08-10 | 2022-10-07 | 東芝テック株式会社 | 薬液吐出装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104703801B (zh) | 2016-08-24 |
| JPWO2014054655A1 (ja) | 2016-08-25 |
| EP2905138A1 (en) | 2015-08-12 |
| CN104703801A (zh) | 2015-06-10 |
| EP2905138B1 (en) | 2019-06-05 |
| JP6202002B2 (ja) | 2017-09-27 |
| EP2905138A4 (en) | 2016-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6202002B2 (ja) | インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 | |
| JP4956994B2 (ja) | 液滴吐出ヘッドの駆動方法 | |
| US8662642B2 (en) | Liquid ejection head | |
| CN109484024B (zh) | 喷墨头、使用该喷墨头的喷墨装置和器件的制造方法 | |
| JP6149863B2 (ja) | インクジェットヘッドの駆動方法、インクジェットヘッドの駆動装置及びインクジェット記録装置 | |
| US20170113457A1 (en) | Inkjet head and inkjet printer | |
| US10906297B2 (en) | Liquid ejection device and image forming device | |
| JP5533298B2 (ja) | インクジェット記録装置 | |
| JP2007203610A (ja) | 液滴吐出ヘッド及び液滴吐出装置 | |
| JP5183547B2 (ja) | 記録装置 | |
| JP2020032715A (ja) | 液体吐出装置及び画像形成装置 | |
| JP4763418B2 (ja) | インクジェットヘッドの駆動方法、インクジェットヘッドおよびインクジェット記録装置 | |
| US20170113460A1 (en) | Inkjet head and inkjet printer | |
| CN108202531B (zh) | 液体喷射头、液体喷射记录装置、及液体喷射头的驱动方法 | |
| JP2013248755A (ja) | 液体吐出ヘッドおよびそれを用いた記録装置 | |
| JP5286840B2 (ja) | インクジェットヘッド及びインクジェットヘッドを備えた塗布装置 | |
| US8123338B2 (en) | Liquid droplet jet head, liquid droplet discharging apparatus, and image forming apparatus | |
| JP5040726B2 (ja) | インクジェットヘッド及びインクジェットヘッドを備えた塗布装置 | |
| JP6134030B2 (ja) | 液体吐出ヘッドおよびそれを用いた記録装置 | |
| JP7533161B2 (ja) | 液滴吐出装置 | |
| JP3348738B2 (ja) | インク噴射装置の駆動方法及びその装置 | |
| WO2016098625A1 (ja) | インクジェットヘッド、インクジェット記録装置、及びインクジェットヘッドの製造方法 | |
| JP2009190306A (ja) | インクジェットヘッド、インクジェットヘッドを備えた塗布装置及びインクジェットヘッドの駆動方法 | |
| JP2024031599A (ja) | 液体吐出ヘッド | |
| JP4935939B2 (ja) | 液滴吐出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13843417 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014539766 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013843417 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |