WO2012176270A1 - 内燃機関の制御装置 - Google Patents
内燃機関の制御装置 Download PDFInfo
- Publication number
- WO2012176270A1 WO2012176270A1 PCT/JP2011/064072 JP2011064072W WO2012176270A1 WO 2012176270 A1 WO2012176270 A1 WO 2012176270A1 JP 2011064072 W JP2011064072 W JP 2011064072W WO 2012176270 A1 WO2012176270 A1 WO 2012176270A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- correction value
- control
- amount
- target
- learning
- Prior art date
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0025—Controlling engines characterised by use of non-liquid fuels, pluralities of fuels, or non-fuel substances added to the combustible mixtures
- F02D41/0047—Controlling exhaust gas recirculation [EGR]
- F02D41/0077—Control of the EGR valve or actuator, e.g. duty cycle, closed loop control of position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2441—Methods of calibrating or learning characterised by the learning conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2451—Methods of calibrating or learning characterised by what is learned or calibrated
- F02D41/2464—Characteristics of actuators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/24—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means
- F02D41/2406—Electrical control of supply of combustible mixture or its constituents characterised by the use of digital means using essentially read only memories
- F02D41/2425—Particular ways of programming the data
- F02D41/2429—Methods of calibrating or learning
- F02D41/2477—Methods of calibrating or learning characterised by the method used for learning
- F02D41/2483—Methods of calibrating or learning characterised by the method used for learning restricting learned values
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02B—INTERNAL-COMBUSTION PISTON ENGINES; COMBUSTION ENGINES IN GENERAL
- F02B29/00—Engines characterised by provision for charging or scavenging not provided for in groups F02B25/00, F02B27/00 or F02B33/00 - F02B39/00; Details thereof
- F02B29/04—Cooling of air intake supply
- F02B29/0406—Layout of the intake air cooling or coolant circuit
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02B—INTERNAL-COMBUSTION PISTON ENGINES; COMBUSTION ENGINES IN GENERAL
- F02B3/00—Engines characterised by air compression and subsequent fuel addition
- F02B3/06—Engines characterised by air compression and subsequent fuel addition with compression ignition
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M26/00—Engine-pertinent apparatus for adding exhaust gases to combustion-air, main fuel or fuel-air mixture, e.g. by exhaust gas recirculation [EGR] systems
- F02M26/13—Arrangement or layout of EGR passages, e.g. in relation to specific engine parts or for incorporation of accessories
- F02M26/22—Arrangement or layout of EGR passages, e.g. in relation to specific engine parts or for incorporation of accessories with coolers in the recirculation passage
- F02M26/23—Layout, e.g. schematics
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Definitions
- the present invention relates to a control device for an internal combustion engine.
- Patent Document 1 describes an internal combustion engine equipped with an exhaust gas recirculation device (hereinafter, this device is referred to as an “EGR device”).
- This EGR device is a device that supplies (that is, recirculates) the exhaust gas to the combustion chamber by introducing the exhaust gas discharged from the combustion chamber of the internal combustion engine into the exhaust passage into the intake passage.
- EGR gas the exhaust gas supplied to the combustion chamber by the EGR device
- EGR gas amount the amount of EGR gas supplied to the combustion chamber.
- the EGR device described in Patent Document 1 has an EGR control valve.
- the opening degree of the EGR control valve can be changed.
- the amount of EGR gas can be changed by changing the opening degree of the EGR control valve. That is, the EGR gas amount can be controlled by controlling the opening degree of the EGR control valve.
- EGR gas reduces the quantity of the substance (especially nitrogen oxide) produced
- the amount of EGR gas that can optimally reduce the exhaust emission varies depending on the engine operating state (that is, the operating state of the internal combustion engine).
- an EGR gas amount that can optimally reduce the exhaust emission according to the engine operating state is obtained in advance by experiments or the like, and the obtained EGR gas amount is used as a target EGR gas amount for the internal combustion engine.
- the target EGR gas amount is set in accordance with the engine operating state during engine operation (that is, during operation of the internal combustion engine) and stored in the electronic control unit of the engine, and the actual EGR amount is set to the set target EGR gas amount.
- the opening degree of the EGR control valve is controlled so that the gas amounts match.
- a correction value for correcting a parameter value (hereinafter referred to as “control parameter value”) that affects the calculation of the operation amount given to the EGR control valve. )
- the control parameter value is corrected by the instantaneous correction value, and the operation amount given to the EGR control valve is calculated using the corrected control parameter value.
- learning addition value a value calculated by multiplying the instantaneous correction value by a coefficient smaller than “1”
- learning correction value a value calculated by multiplying the instantaneous correction value by a coefficient smaller than “1”
- learning correction value a learning value calculated by multiplying the instantaneous correction value by a coefficient smaller than “1”
- control parameter value is calculated based on the deviation and the already calculated learning correction. It is possible to employ a control (hereinafter referred to as “learning control”) in which an operation amount given to the EGR control valve is calculated using the corrected control parameter value.
- an excessively large instantaneous correction value that is, When an instantaneous correction value that is far from an appropriate instantaneous correction value that can converge the EGR gas amount to the target EGR gas amount with a stable behavior is calculated, an excessively large learning addition value (that is, an EGR gas amount) May be calculated as a learning addition value that causes a learning correction value that is significantly different from an appropriate learning correction value that can be converged to the target EGR gas amount with a stable behavior.
- an excessively large learning correction value That is, a learning correction value that is far from an appropriate learning correction value that can converge the EGR gas amount to the target EGR gas amount with a stable behavior is calculated.
- the control parameter value is corrected by the excessively large learning correction value and the instantaneous correction value calculated next, and when the corrected control parameter value is used for calculation of the operation amount given to the EGR control valve, The amount of EGR gas changes while exhibiting unstable behavior. That is, the control of the EGR gas amount becomes unstable.
- the learning correction value includes a deviation of the EGR gas amount from the target EGR gas amount (hereinafter referred to as target EGR) caused by a steady error related to the operation of the EGR control valve (hereinafter referred to as “EGR control valve steady error”).
- the deviation of the EGR gas amount relative to the amount is called “EGR gas amount deviation”). That is, in order to calculate the operation amount to be given to the EGR control valve, the relationship between the EGR gas amount and the operation amount when the operation amount is given to the control target is obtained in advance. Then, an operation amount to be applied to the EGR control valve is calculated from the obtained relationship and the target EGR gas amount, and the calculated operation amount is applied to the EGR control valve.
- the operation characteristic of the EGR control valve with respect to a given operation amount is the same as the operation characteristic of the EGR control valve used to obtain the above relationship (hereinafter, this operation characteristic is referred to as “the desired operation characteristic”). If the environment surrounding the EGR control valve is the same as the environment assumed when the above relationship is obtained (hereinafter, this environment is referred to as “the desired ambient environment”), the operation amount calculated using the above relationship is By giving the EGR control valve, the amount of EGR gas should match the target amount of EGR gas. However, in practice, since the operation characteristics of the EGR control valve differ depending on the individual EGR control valves, the operation characteristics of the EGR control valve may differ from the intended operation characteristics.
- the EGR gas amount does not match the target EGR gas amount.
- the environment surrounding the EGR control valve may be different from the intended surrounding environment.
- the EGR gas amount does not match the target EGR gas amount even if the operation amount calculated using the above relationship is given to the EGR control valve. In such a case, it can be said that an EGR control valve steady-state error has occurred in the EGR control valve.
- the learning correction value has a function of eliminating such an EGR control valve steady-state error.
- the learning correction value increases as the learning correction value is calculated, that is, the learning correction value progresses.
- Approaches a value that can completely eliminate the EGR control valve steady-state error hereinafter, this value is referred to as a “learning value”. Therefore, in order to increase the followability of the EGR gas amount with respect to the target EGR gas amount, it is preferable that the learning correction value reaches the learning value as soon as possible.
- the instantaneous correction value is not an excessively large value, but a relatively large learning addition value is calculated from the instantaneous correction value, and the learning correction value is updated by this learning addition value, and is calculated next to the learning correction value.
- the control parameter value is corrected by the instantaneous correction value, and the operation amount given to the EGR control valve is calculated based on the corrected control parameter value. Even if this operation amount is given to the EGR control valve, the EGR gas amount If the learning coefficient is fixed at a relatively small constant value, the learning addition value calculated from the instantaneous correction value is excessively small (that is, the behavior of the EGR gas amount is It is an excessively small value compared to the largest learning addition value in a range where it does not become unstable.
- the learning correction value cannot reach the learning value quickly.
- the learning coefficient is fixed to a relatively large constant value, when the instantaneous correction value is excessively large, the learning addition value calculated from the instantaneous correction value becomes excessively large. In this case, since an excessively large learning correction value is calculated, after all, the learning correction value cannot reach the learning value quickly.
- control amount EGR gas amount in the above example
- target EGR gas amount in the above example target EGR gas amount in the above example
- control target in the above example, the EGR control valve
- An object of the present invention is to simultaneously achieve the stability of control of the control amount and the improvement of the learning speed of the learning correction value.
- One aspect of the present invention is an operation state of a control target that should be a target in order to calculate a target control amount that is a target value of the control amount of the control target and to match the control amount with the calculated target control amount.
- a control parameter correction value for correcting a control parameter value that is a parameter value used for setting a target operation state is calculated, and set using the control parameter value corrected by the calculated control parameter correction value.
- the present invention relates to a control device for an internal combustion engine that controls an operation state of a control target according to a target operation state.
- the control device provides an instantaneous correction value for correcting the control parameter value currently used for setting the target operation state of the control target so that the control amount matches the target control amount.
- the learning correction value is obtained by integrating the control calculated based on the deviation of the control amount and the learning addition value that is obtained by correcting the instantaneous correction value by the learning coefficient that is a coefficient for correcting the instantaneous correction value.
- the control parameter correction value is calculated based on the newly calculated instantaneous correction value and the already calculated learning correction value.
- the follow-up form allowed as the follow-up form of the control amount with respect to the target control amount is predetermined as the allowable follow-up form, and the follow-up form of the control amount with respect to the target control amount is
- the range of the control parameter correction value in the allowable follow-up form is determined in advance as the allowable control parameter correction value range.
- control device of the present invention sets the learning coefficient so that the control parameter correction value falls within the allowable control parameter correction value range.
- the following means are generally employed as means for controlling the control amount to the target control amount depending on the controlled object. That is, in order to calculate the operation amount to be given to the control object to control the control amount to the target control amount based on the target control amount, a relationship between the target control amount and the operation amount is obtained in advance, During operation of the engine, an operation amount is calculated based on the target control amount using this relationship, and this operation amount is given to the control target.
- the operation characteristic of the controlled object used when the above relationship is obtained is referred to as “initial operation characteristic”, and the environment surrounding the control object when the above relationship is obtained is referred to as “the desired ambient environment”.
- the above relationship is used to determine the The control amount should match the target control amount by giving the calculated operation amount to the control target.
- the operation characteristics of the controlled object may deviate from the intended operation characteristics. In this case, even if the operation amount calculated using the above relationship is given to the control target, the control amount does not match the target control amount.
- the controlled object when used for a long period of time, the controlled object may be deteriorated, and its operating characteristics may deviate from the intended operating characteristics. Also in this case, even if the operation amount calculated using the above relationship is given to the control object, the control amount does not match the target control amount. Of course, the environment surrounding the controlled object may be different from the intended surrounding environment. Also in this case, even if the operation amount calculated using the above relationship is given to the control object, the control amount does not match the target control amount. Under such circumstances, it can be said that a steady error (hereinafter referred to as “steady operation characteristic error”) of the operation characteristic of the controlled object occurs with respect to the intended operation characteristic.
- steady operation characteristic error hereinafter referred to as “steady operation characteristic error”
- control amount error An error in the control amount with respect to the target control amount (hereinafter, this error is referred to as “control amount error”) is a control amount error resulting from the steady operation characteristic error (hereinafter, this control amount error is referred to as “steady control amount error”).
- steady control amount error When the operating state of the internal combustion engine is in a steady state, it can be said that most of the control amount error is a steady control amount error.
- the instantaneous correction value is calculated based on the control amount error
- the learning addition value is calculated based on the instantaneous correction value
- the learning correction value is calculated based on the learning addition value (that is, the learning correction value is It is updated based on this learning addition value). Therefore, the learning correction value has a function of eliminating the steady control amount error. If the learning correction value is calculated more frequently, that is, if learning of the learning correction value is advanced, the learning correction value is a value that can completely eliminate the steady-state control amount error (hereinafter, this value is referred to as “learning value”). Gradually). Therefore, from the viewpoint of quickly converging the control amount to the target control amount, it is preferable that the learning correction value reaches the learning value early. That is, it is preferable to improve the learning speed of the learning correction value.
- a means for setting the learning coefficient to a relatively large value can be considered.
- this has the following disadvantages. That is, when the learning coefficient is fixed to a relatively large constant value, an excessively large instantaneous correction value (that is, a large value from an appropriate instantaneous correction value that can converge the control amount to the target control amount with a stable behavior).
- an excessively large learning addition value that is, a learning correction value far from an appropriate learning correction value that can converge the control amount to the target control amount with a stable behavior
- a learning addition value that is calculated is calculated.
- an excessively large learning addition value is calculated, and a new learning correction value is calculated using the learning addition value (that is, the learning correction value is updated), an excessively large learning correction value (that is, the learning correction value is updated). Therefore, a learning correction value that is far from an appropriate learning correction value that can converge the control amount to the target control amount with a stable behavior is calculated.
- the excessively large learning correction value is used for calculating the control parameter correction value, the control parameter value is corrected by the control parameter correction value, and the corrected control parameter value is used for controlling the operation state of the control target. If this is done, the controlled variable will change while exhibiting unstable behavior. That is, control of the control amount becomes unstable. However, it is not preferable that the control amount is unstable.
- the learning coefficient is fixed to a constant value. As long as the means is adopted, these cannot be achieved simultaneously. Under such circumstances, the inventor of the present application has come to the idea of variably setting the learning coefficient, and if the learning coefficient is set to any value depending on the situation, ensuring the stability of control of the control amount and learning correction value As a result of repeated studies on whether the improvement of the learning speed can be achieved at the same time, the present invention has been invented.
- the control parameter correction value is within the allowable control parameter correction value range (that is, when the control parameter value corrected by the control parameter correction value is used in the operation state of the control target, the control amount is set to the target control amount.
- the learning coefficient is set to a value within the range of the control parameter correction value that can be converged with a stable behavior. For this reason, even if an excessively large instantaneous correction value is calculated, an excessively large learning addition value is not calculated, and as a result, an excessively large learning correction value is not calculated.
- an excessively large instantaneous correction value is calculated, a learning addition value is calculated based on the instantaneous correction value, a learning correction value is calculated based on the learning addition value, and the learning correction value Even if the control parameter correction value is calculated using the control parameter value and the control parameter value corrected by the control parameter correction value is used for controlling the operation state of the control target, the control amount control is stable. Since learning of the learning correction value proceeds in a stable state, the learning correction value can reach the learning value quickly (that is, the learning speed of the learning correction value is improved). .
- the learning coefficient is set to a large value, a learning addition value is calculated based on the instantaneous correction value using the learning coefficient, and learning is performed based on the learning addition value.
- the control parameter correction value is a value within the allowable control parameter correction value range. That is, in the present invention, when the instantaneous correction value is not an excessively large value, the learning coefficient is set to a large value. Therefore, according to the present invention, the learning correction value can be quickly reached the learning value in a state where the control of the control amount is stabilized (that is, the learning speed of the learning correction value is improved).
- Another invention of the present application calculates a target control amount that is a target value of a control amount of a control target, and an operation state of the control target that should be a target in order to make the control amount coincide with the calculated target control amount
- a control parameter correction value for correcting a control parameter value that is a parameter value used to set a target operation state is calculated, and the control parameter value corrected by the calculated control parameter correction value is used.
- the present invention relates to a control device for an internal combustion engine that controls an operation state of a control target in accordance with a target operation state that is set.
- the control device provides an instantaneous correction value for correcting the control parameter value currently used for setting the target operation state of the control target so that the control amount matches the target control amount.
- the learning correction value is obtained by integrating the control calculated based on the deviation of the control amount and the learning addition value that is obtained by correcting the instantaneous correction value by the learning coefficient that is a coefficient for correcting the instantaneous correction value.
- the control parameter correction value is calculated based on the newly calculated instantaneous correction value and the already calculated learning correction value.
- control device of the present invention sets a larger learning coefficient as the learning correction value already calculated is larger.
- steady operation characteristic error a steady error of the operation characteristic of the control target with respect to the intended operation characteristic.
- the controlled variable error (that is, the controlled variable error with respect to the target controlled variable) includes the steady controlled variable error (that is, the controlled variable error caused by the steady operation characteristic error), and the operating state of the internal combustion engine is When in a steady state, it can be said that most of the controlled variable error is a steady controlled variable error.
- the learning correction value has a function of eliminating the steady control amount error. From the viewpoint of quickly converging the control amount to the target control amount, it is preferable to make the learning correction value reach the learning value early. That is, it is preferable to improve the learning speed of the learning correction value.
- control of the control amount becomes unstable.
- the learning correction value proceeds while the control amount control is unstable, the learning correction value cannot reach the learning value quickly (that is, the learning speed of the learning correction value is improved).
- the learning coefficient is fixed to a relatively small constant value, control of the control amount becomes stable, but the learning correction value cannot reach the learning value quickly.
- the learning coefficient is fixed to a constant value. As long as the means is adopted, these cannot be achieved simultaneously. Under such circumstances, the inventor of the present application has come to the idea of variably setting the learning coefficient, and if the learning coefficient is set to any value depending on the situation, ensuring the stability of control of the control amount and learning correction value As a result of repeated studies on whether the improvement of the learning speed can be achieved at the same time, the present invention has been invented.
- the learning coefficient is set to a larger value as the learning correction value is larger.
- a large learning correction value means that the learning correction value is close to the learning value, and if the learning correction value is close to the learning value, the possibility that an excessive instantaneous correction value is calculated is low. Therefore, even if the learning coefficient is set to a large value when the learning correction value is large, the possibility that an excessive learning addition value is calculated is low. Therefore, the learning correction value updated by the learning addition value calculated at this time is used for calculation of the control parameter correction value, and the control parameter value corrected by this control parameter correction value is used for control of the operation state of the control target. Even if it is performed, the control of the control amount is sufficiently suppressed from becoming unstable. On the other hand, the learning coefficient is large, so that the learning speed of the learning correction value is sufficiently improved.
- the smaller the learning correction value the smaller the learning coefficient is set.
- a small learning correction value means that the learning correction value is far from the learning value, and if the learning correction value is far from the learning value, there is a high possibility that an excessive instantaneous correction value is calculated. Therefore, if the learning coefficient is large, there is a high possibility that an excessive learning addition value is calculated.
- the learning correction value updated by the excessive learning addition value is used for calculation of the control parameter correction value, and the control parameter value corrected by the control parameter correction value is used for controlling the operation state of the control target. If controlled, control of the controlled variable becomes unstable.
- the learning coefficient is set to a smaller value as the learning correction value is smaller.
- the control of the control amount is sufficiently suppressed from being unstable, while the learning coefficient is set to a value corresponding to the learning correction value.
- the learning correction value learning speed is improved in an appropriate manner.
- the control device of the present invention comprises air-fuel ratio control means for controlling the air-fuel ratio of the air-fuel mixture formed in the combustion chamber, the controlled object is the air-fuel ratio control means, and the control amount is in the combustion chamber.
- the air-fuel ratio of the air-fuel mixture formed, the estimated air-fuel ratio that is the estimated value of the air-fuel ratio is the target control amount
- the control parameter value is a parameter used for setting the target operating state of the air-fuel ratio control means
- the control parameter correction value is a correction value for correcting the control parameter value so that the air-fuel ratio of the air-fuel mixture matches the estimated air-fuel ratio, and the instantaneous correction value is the estimated air-fuel ratio of the air-fuel mixture.
- the estimated air-fuel ratio is calculated, Air-fuel mixture
- a control parameter correction value for correcting the control parameter value is calculated so as to match the estimated air-fuel ratio
- the target of the air-fuel ratio control means is calculated using the control parameter value corrected by the calculated control parameter correction value.
- the operating state is set.
- control device of the present invention includes an exhaust gas recirculation device that introduces exhaust gas discharged from the combustion chamber into the exhaust passage into the intake passage, and the exhaust gas recirculation device introduces the amount of exhaust gas introduced into the intake passage.
- Exhaust gas recirculation amount control means for controlling the exhaust gas recirculation amount control means the control parameter value is a parameter value used for setting the target operating state of the exhaust gas recirculation amount control means, and the instantaneous correction value is When the correction value is used to correct the control parameter value currently used for setting the target operating state of the exhaust gas recirculation amount control means so that the air-fuel ratio matches the estimated air-fuel ratio, Then, an estimated air-fuel ratio is calculated, a control parameter correction value for correcting the control parameter value so that the air-fuel ratio of the air-fuel mixture matches the estimated air-fuel ratio is calculated, and based on the calculated control parameter correction value, Target operating state of the exhaust gas recirculation amount control means is set by using the corrected control parameter value each.
- the control device of the present invention sets a target exhaust gas recirculation amount that is a target value of the exhaust gas recirculation amount that is the amount of exhaust gas introduced into the intake passage by the exhaust gas recirculation device, and
- the engine having a value of a predetermined parameter relating to the operation of the internal combustion engine The exhaust gas recirculation amount to be targeted in accordance with the operation parameter value is obtained in advance as a reference exhaust gas recirculation amount
- the control parameter value is the engine operation parameter value
- the engine operation parameter value is the control parameter correction.
- the reference exhaust gas recirculation amount is calculated based on the corrected engine operating parameter value, and the calculated reference exhaust gas recirculation amount is calculated as the target exhaust gas. It is set to be re-circulation amount.
- the control device of the present invention further includes a fuel supply means for supplying fuel to the combustion chamber, and a target that is a target value of the fuel supply amount that is the amount of fuel supplied to the combustion chamber by the fuel supply means.
- a fuel supply amount for supplying fuel to the combustion chamber
- a target that is a target value of the fuel supply amount that is the amount of fuel supplied to the combustion chamber by the fuel supply means.
- the engine operating parameter value is set to the target fuel supply.
- a target fuel supply amount equivalent amount which is a fuel supply amount corresponding to the amount, and the target fuel supply amount equivalent amount is corrected by the control parameter correction value and based on the corrected target fuel supply amount equivalent amount.
- a gas recirculation amount is calculated, and the calculated reference exhaust gas recirculation amount is set as a target exhaust gas recirculation amount.
- the control device of the present invention sets a target exhaust gas recirculation amount that is a target value of the exhaust gas recirculation amount that is the amount of exhaust gas introduced into the intake passage by the exhaust gas recirculation device, and
- the engine operation which is a value of a predetermined parameter relating to the operation of the internal combustion engine
- the target exhaust gas recirculation amount is determined in advance as the reference exhaust gas recirculation amount in accordance with the parameter value
- the control parameter value is the reference exhaust gas recirculation amount, which is based on the engine operating parameter value.
- An exhaust gas recirculation amount is calculated, the calculated reference exhaust gas recirculation amount is corrected by the control parameter correction value, and the corrected reference exhaust gas recirculation amount is the target exhaust gas. It is set in the circulation amount.
- the control device of the present invention further includes a fuel supply means for supplying fuel to the combustion chamber, and a target that is a target value of the fuel supply amount that is the amount of fuel supplied to the combustion chamber by the fuel supply means.
- a fuel supply means for supplying fuel to the combustion chamber
- a target that is a target value of the fuel supply amount that is the amount of fuel supplied to the combustion chamber by the fuel supply means.
- the engine operating parameter value is set to the target fuel supply.
- a target fuel supply amount equivalent amount corresponding to the amount, a reference exhaust gas recirculation amount is calculated based on the target fuel supply amount equivalent amount, and the calculated reference exhaust gas recirculation amount is It is corrected by the control parameter correction value, and the corrected reference exhaust gas recirculation amount is set as the target exhaust gas recirculation amount.
- control device of the present invention further includes supply air amount detection means for detecting the supply air amount that is the amount of air supplied to the combustion chamber, according to the above invention, this corresponds to the target fuel supply amount.
- a target fuel supply amount equivalent amount that is a fuel supply amount is corrected by the control parameter correction value, and is estimated based on the corrected target fuel supply amount equivalent amount and the supply air amount detected by the supply air amount detecting means.
- An air-fuel ratio is calculated.
- (A) is the figure which showed the map utilized in order to acquire the reference
- (B) is used in order to acquire the reference
- (C) is a diagram showing a map used for acquiring a reference EGR rate in the first embodiment. It is the figure which showed the map utilized in order to acquire a correction
- (A) is the figure which showed the map utilized in order to acquire a reference fuel injection valve in 5th Embodiment
- (B) is used in order to acquire the reference
- FIG. It is the figure which showed the map utilized in order to acquire a learning correction value in 5th Embodiment.
- first embodiment One embodiment of the control device for an internal combustion engine of the present invention (hereinafter referred to as “first embodiment”) will be described.
- engine operation means “operation of the internal combustion engine”
- engine speed means “speed of the internal combustion engine”.
- FIG. 1 shows an internal combustion engine to which the control device of the first embodiment is applied.
- the internal combustion engine shown in FIG. 1 is a compression ignition type internal combustion engine (so-called diesel engine).
- 10 is an internal combustion engine
- 20 is a main body of the internal combustion engine
- 21 is a fuel injection valve
- 22 is a fuel pump
- 23 is a fuel supply passage
- 30 is an intake passage
- 31 is an intake manifold
- 32 is an intake pipe
- 33 Throttle valve, 34 intercooler, 35 air flow meter, 36 air cleaner, 37 intake pressure sensor
- 70 is an accelerator pedal
- 71 is an accelerator pedal depression amount sensor
- 72 is a crank position sensor
- 80 is an electronic control device.
- the intake passage 30 includes an intake manifold 31 and an intake pipe 32.
- the exhaust passage 40 includes an exhaust manif
- the electronic control unit 80 is composed of a microcomputer.
- the electronic control unit 80 includes a CPU (microprocessor) 81, a ROM (read only memory) 82, a RAM (random access memory) 83, a backup RAM 84, and an interface 85.
- the CPU 81, ROM 82, RAM 83, backup RAM 84, and interface 85 are connected to each other by a bidirectional bus.
- the fuel injection valve 21 is attached to the main body 20 of the internal combustion engine.
- a fuel pump 22 is connected to the fuel injection valve 21 via a fuel supply passage 23.
- the fuel pump 22 supplies high-pressure fuel to the fuel injection valve 21 via the fuel supply passage 23.
- the fuel injection valve 21 is electrically connected to the interface 85 of the electronic control unit 80.
- the electronic control unit 80 supplies a command signal for causing the fuel injection valve 21 to inject fuel to the fuel injection valve 21.
- the fuel pump 22 is also electrically connected to the interface 85 of the electronic control unit 80.
- the electronic control unit 80 supplies the fuel pump 22 with a control signal for controlling the operation of the fuel pump 22 so that the pressure of the fuel supplied from the fuel pump 22 to the fuel injection valve 21 is maintained at a predetermined pressure.
- the fuel injection valve 21 is attached to the main body 20 of the internal combustion engine so that its fuel injection hole is exposed in the combustion chamber. Therefore, when a command signal is supplied from the electronic control unit 80 to the fuel injection valve 21, the fuel injection valve 21 directly injects fuel into the combustion chamber.
- the intake manifold 31 is branched into a plurality of pipes at one end thereof, and these branched pipes are connected to intake ports (not shown) respectively formed corresponding to the combustion chambers of the main body 20 of the internal combustion engine. Yes.
- the intake manifold 31 is connected to one end of the intake pipe 32 at the other end.
- the exhaust manifold 41 branches into a plurality of pipes at one end thereof, and these branched pipes are connected to exhaust ports (not shown) formed respectively corresponding to the combustion chambers of the main body 20 of the internal combustion engine. Yes.
- the exhaust manifold 41 is connected to one end of the exhaust pipe 42 at the other end.
- the throttle valve 33 is disposed in the intake pipe 32.
- this opening is referred to as “throttle valve opening”
- the flow path area in the intake pipe 32 in the region where the throttle valve 33 is disposed changes.
- the throttle valve 33 is connected to an actuator (hereinafter, this actuator is referred to as “throttle valve actuator”) for changing its operating state (that is, the throttle valve opening).
- the throttle valve actuator is electrically connected to the interface 85 of the electronic control unit 80.
- the electronic control unit 80 supplies a control signal for driving the throttle valve actuator to the throttle valve actuator so as to control the throttle valve opening to the target throttle valve opening.
- the intercooler 34 is disposed in the intake pipe 32 upstream of the throttle valve 33.
- the intercooler 34 cools the air flowing into it.
- the air flow meter 35 is disposed in the intake pipe 32 upstream of the intercooler 34.
- the air flow meter 35 is electrically connected to the interface 85 of the electronic control unit 80.
- the air flow meter 35 outputs an output value corresponding to the amount of air passing therethrough. This output value is input to the electronic control unit 80.
- the electronic control unit 80 calculates the amount of air passing through the air flow meter 35 based on this output value, and hence the amount of air taken into the combustion chamber.
- the intake pressure sensor 37 is disposed in the intake passage 30 (more specifically, the intake manifold 31) downstream of the throttle valve 33.
- the intake pressure sensor 37 is electrically connected to the interface 85 of the electronic control unit 80.
- the intake pressure sensor 37 outputs an output value corresponding to the pressure of the surrounding gas (that is, the pressure of the gas in the intake manifold 31 and the pressure of the gas sucked into the combustion chamber). Based on this output value, the electronic control unit 80 calculates the pressure of the gas around the intake pressure sensor 37, that is, the pressure of the gas sucked into the combustion chamber (hereinafter referred to as “intake pressure”).
- the air-fuel ratio sensor 43 is disposed in the exhaust passage 40 (more specifically, the intake pipe 42).
- the air-fuel ratio sensor 43 is electrically connected to the interface 85 of the electronic control unit 80.
- the air-fuel ratio sensor 43 outputs an output value corresponding to the oxygen concentration in the exhaust gas coming there.
- the electronic control unit 80 calculates the air-fuel ratio of the air-fuel mixture formed in the combustion chamber based on this output value.
- the accelerator pedal depression amount sensor 71 is electrically connected to the interface 85 of the electronic control unit 80.
- the accelerator pedal depression amount sensor 71 outputs an output value corresponding to the depression amount of the accelerator pedal 70. This output value is input to the electronic control unit 80. Based on this output value, the electronic control unit 80 calculates the depression amount of the accelerator pedal 70 and thus the torque required for the internal combustion engine.
- the crank position sensor 72 is disposed in the vicinity of the crankshaft (not shown) of the internal combustion engine.
- the crank position sensor 72 is electrically connected to the interface 85 of the electronic control unit 80.
- the crank position sensor 72 outputs an output value corresponding to the rotational phase of the crankshaft. This output value is input to the electronic control unit 80.
- the electronic control unit 80 calculates the engine speed based on this output value.
- the EGR device 50 includes an exhaust gas recirculation passage (hereinafter referred to as “EGR passage”) 51, an exhaust gas recirculation control valve (hereinafter referred to as “EGR control valve”) 52, and an exhaust gas recirculation cooler (hereinafter referred to as “EGR passage valve”).
- the cooler is referred to as “EGR cooler” 53.
- the EGR device 50 is a device that introduces exhaust gas discharged from the combustion chamber into the exhaust passage 40 into the intake passage 30 via the EGR passage 51.
- One end of the EGR passage 51 is connected to the exhaust passage 40 (more specifically, the exhaust manifold 41) and the other end is connected to the intake passage 30 (more specifically, the intake manifold 31).
- the EGR passage 51 connects the exhaust passage 40 to the intake passage 30.
- the EGR control valve 52 is disposed in the EGR passage 51.
- the EGR control valve 52 has a built-in actuator (hereinafter, this actuator is referred to as an “EGR control valve actuator”) for changing its operating state (that is, the EGR control valve opening).
- the EGR control valve actuator is electrically connected to the electronic control unit 80.
- the electronic control unit 80 supplies a control signal for driving the EGR control valve actuator to the EGR control valve actuator so as to control the EGR control valve opening to the target EGR control valve opening.
- fuel injection amount means “amount of fuel injected from the fuel injection valve”.
- the optimum fuel injection amount is obtained in advance by experiments or the like according to the amount of depression of the accelerator pedal.
- the obtained fuel injection amount is stored in the electronic control unit as a reference fuel injection amount Qb in the form of a map of a function of the accelerator pedal depression amount Dac as shown in FIG.
- the reference fuel injection amount Qb corresponding to the accelerator pedal depression amount Dac at that time is acquired from the map of FIG. 2A, and the acquired reference fuel injection amount Qb becomes the target fuel injection amount. Is set.
- a command signal is supplied from the electronic control unit to the fuel injection valve so that the fuel of the target fuel injection amount thus set is injected from the fuel injection valve.
- the reference fuel injection amount Qb increases as the accelerator pedal depression amount Dac increases.
- the operation state of the internal combustion engine shown in FIG. 1 is maintained in a steady operation state (that is, a state in which the fuel injection amount and the engine speed are kept constant) and the environment surrounding the internal combustion engine.
- a steady operation state that is, a state in which the fuel injection amount and the engine speed are kept constant
- Parameters that affect the engine operating state for example, atmospheric pressure, atmospheric temperature, internal combustion engine temperature, etc., hereinafter referred to as “environmental parameters” have a specific value.
- an appropriate throttle valve opening corresponding to the fuel injection amount and the engine speed is obtained in advance by experiments or the like. Then, as shown in FIG.
- the obtained throttle valve opening is set as a reference throttle valve opening Dthb in the form of a map of a function of the fuel injection amount Q and the engine speed N. Is remembered.
- the reference throttle valve opening Dthb increases as the fuel injection amount Q increases, and the reference throttle valve opening Dthb increases as the engine speed N increases.
- the reference throttle valve opening degree Dthb corresponding to the fuel injection amount Q and the engine speed N at that time is acquired from the map of FIG. 2B, and the acquired reference throttle valve opening degree Dthb is obtained. Is set to the target throttle valve opening. Then, a control signal for driving the throttle valve actuator is supplied from the electronic control device so as to drive the throttle valve so that the throttle valve opening becomes the target throttle valve opening TDth thus set.
- the target value of the EGR rate (that is, the ratio of the mass of exhaust gas to the mass of all gases sucked into the combustion chamber) is set as the target EGR rate (this target EGR rate).
- the method for setting the rate will be described later).
- the EGR control valve actuator is controlled by the electronic control unit so that the actual EGR rate (a method for calculating the EGR rate will be described later) is controlled so that the EGR control valve opening degree matches the set target EGR rate. Is feedback controlled.
- a control signal for driving the EGR control valve actuator to drive the EGR control valve so as to increase the EGR control valve opening degree is sent from the electronic control unit. Supplied to the EGR control valve actuator.
- a control signal for driving the EGR control valve actuator to drive the EGR control valve so as to decrease the EGR control valve opening degree is sent from the electronic control unit to the EGR control valve actuator. To be supplied.
- the actual EGR rate Regr is calculated according to the following equation 1.
- Gc is “the total amount of gas sucked into the combustion chamber in one intake stroke (that is, a mixture of air and EGR gas)”
- Ga is “in one intake stroke”
- the total amount of gas sucked into the combustion chamber in one intake stroke can be calculated from parameters such as engine speed and intake pressure, and the amount of air sucked into the combustion chamber in one intake stroke Can be calculated from the amount of air detected by an air flow meter, for example.
- the operation state of the internal combustion engine shown in FIG. 1 is maintained in a steady operation state (that is, a state in which the fuel injection amount and the engine speed are kept constant) and the environment surrounding the internal combustion engine.
- Parameters that affect the engine operating state for example, atmospheric pressure, atmospheric temperature, internal combustion engine temperature, etc., hereinafter referred to as “environmental parameters” have a specific value.
- an appropriate EGR rate corresponding to the fuel injection amount and the engine speed that is, the ratio of the mass of exhaust gas to the mass of all gases sucked into the combustion chamber
- the obtained EGR rate is stored in the electronic control unit as a reference EGR rate Regrb in the form of a map of a function of the fuel injection amount Q and the engine speed N as shown in FIG. Yes.
- the reference EGR rate Regrb decreases as the fuel injection amount Q increases, and the reference EGR rate Regrb decreases as the engine speed N increases.
- the fuel injection obtained by multiplying the target fuel injection amount set during engine operation by a control parameter correction value (details of this control parameter correction value will be described later).
- the amount is set as the fuel injection amount Q for obtaining the reference EGR rate Regrb from the map of FIG. 2 (C), and the engine speed at that time is used for obtaining the reference EGR rate Regrb from the map of FIG. 2 (C).
- the reference EGR rate Regrb is acquired from the map of FIG. That is, the fuel injection amount obtained by correcting the target fuel injection amount set during engine operation with the control parameter correction value is used to obtain the reference EGR rate Regrb from the map of FIG. Then, the reference EGR rate Regrb acquired from the map of FIG. 2C is set as the target EGR rate.
- Equation 2 “Q” is “a fuel supply amount used for obtaining the reference EGR rate from the map of FIG. 2C”, “TQ” is a “target fuel injection amount”, and “K”. Is the “control parameter correction value”.
- detected air-fuel ratio means “air-fuel ratio of air-fuel mixture detected by an air-fuel ratio sensor”
- estimated air-fuel ratio means “estimated value of air-fuel ratio of air-fuel mixture”.
- intake air amount means “amount of air detected by an air flow meter”.
- control parameter correction value is an instantaneous correction value, a learning correction value (details of these instantaneous correction value and learning correction value will be described later), and “1”. Calculated by adding up.
- K is a “control parameter correction value”
- KT is an “instantaneous correction value”
- KG is a “learning correction value”.
- air-fuel ratio error ratio a value obtained by dividing the estimated air-fuel ratio by the detected air-fuel ratio (hereinafter, this value is referred to as “air-fuel ratio error ratio”) is calculated.
- Air-fuel ratio error ratio a value obtained by dividing the estimated air-fuel ratio by the detected air-fuel ratio
- AFe an “estimated air-fuel ratio”
- AFd a “detected air-fuel ratio”.
- the estimated air-fuel ratio is a value obtained by dividing the intake air amount by a value obtained by multiplying the target fuel injection amount by the control parameter correction value, as shown in the following equation 5.
- Equation 5 “AFe” is “estimated air-fuel ratio”
- K is “control parameter correction value”
- TQ is “target fuel injection amount”
- Ga is “intake air amount”. It is. Further, it can be said that the air-fuel ratio error ratio corresponds to a value corresponding to the deviation of the detected air-fuel ratio with respect to the estimated air-fuel ratio.
- the reference EGR rate is acquired so that the air-fuel ratio error ratio becomes “1”.
- the control parameter correction value that can set the air-fuel ratio error ratio to “1” by correcting the control parameter correction value currently used for correcting the target fuel injection amount for calculating the fuel injection amount used for The correction value is calculated as an instantaneous correction value.
- the target fuel supply for calculating the fuel injection amount used for obtaining the reference EGR rate so that the air-fuel ratio error ratio becomes “1”.
- the air-fuel ratio error ratio can be set to “1” by correcting the current target fuel injection amount on the assumption that the target fuel injection amount is corrected by the control parameter correction value currently used for correcting the amount.
- a correction value for the target fuel injection amount is calculated as an instantaneous correction value.
- the learning correction value of the first embodiment will be described.
- the instantaneous correction value calculated sequentially is multiplied by a predetermined coefficient (hereinafter referred to as “learning coefficient”, the details of which will be described later).
- a new learning correction value is calculated by adding the obtained value (hereinafter referred to as “learning addition value”) and the currently used learning correction value.
- “KGn” is “newly calculated learning correction value (ie, updated learning correction value)”
- KT” is “instantaneous correction value”
- KL” is “learning coefficient”.
- “KGp” is “the currently used learning correction value”.
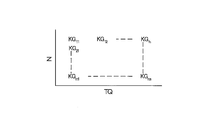
- the new learning correction value KGn calculated in this way is the learning correction corresponding to the current target fuel injection amount TQ and the current engine speed N among the learning correction values KG stored in the map of FIG. Stored as value KG.
- the calculation and storage of the new learning correction value corresponds to the update of the learning correction value.
- the instantaneous correction value is calculated based on the air-fuel ratio error ratio as described above, and the learning correction value is calculated from the map of FIG. 3 based on the target fuel injection amount TQ and the engine speed N at that time. KG is acquired.
- the control parameter correction value K is calculated by applying the learning correction value KG thus obtained and the instantaneous correction value calculated as described above to the above equation 3. Note that the initial value of the learning correction value KG stored in the map of FIG. 3 is “0”.
- the learning coefficient of the first embodiment is set to a larger value as the currently used learning correction value is larger.
- the learning coefficient is a value of “0” or more and a value of “1” or less.
- a command signal (in other words, an operation amount to be given to the fuel injection valve) to be given to the fuel injection valve in order to inject the fuel of the target fuel injection amount from the fuel injection valve based on the target fuel injection amount.
- a relationship between the target fuel injection amount and the command signal (for example, a conversion rule for converting the target fuel injection amount into the command signal) is obtained in advance, and this relationship is used during engine operation to target fuel injection.
- a command signal is calculated based on the quantity, and this command signal is given to the fuel injection valve.
- the operating characteristic of the fuel injection valve used when the above relationship is obtained is referred to as “the desired operating characteristic”
- the environment surrounding the fuel injection valve when the above relationship is obtained is referred to as “the desired operating characteristic”. If the operating characteristics of the fuel injector are the same as the desired operating characteristics and the environment surrounding the fuel injector is the same as the desired surrounding environment, the target fuel The command signal calculated based on the injection amount is given to the fuel injection valve, so that the fuel injection amount should match the target fuel injection amount.
- the operating characteristics of the fuel injection valve differ depending on the individual fuel injection valves, so that the operating characteristics of the fuel injection valve may deviate from the intended operating characteristics.
- the relationship between the output value of the air flow meter and the intake air amount (for example, a conversion rule for converting the output value of the air flow meter into the intake air amount). ) Is obtained in advance, and the intake air amount is calculated based on the output value of the air flow meter using this relationship during engine operation.
- the operating characteristics of the air flow meter used when the above relationship is determined are referred to as “initial operating characteristics”, and the environment surrounding the air flow meter when the above relationship is determined is referred to as “the desired ambient environment”.
- the intake air amount calculated using the above relationship Should match the actual intake air volume.
- the intake air amount calculated using the above relationship does not match the actual intake air amount.
- the air flow meter may be deteriorated, and its operating characteristics may deviate from the intended operating characteristics. Also in this case, the intake air amount calculated using the above relationship does not match the actual intake air amount.
- steady operational characteristic error of the air flow meter there is a steady error in the operational characteristics of the air flow meter with respect to the intended operational characteristics (hereinafter, this error is referred to as “steady operational characteristic error of the air flow meter”).
- the error of the detected air-fuel ratio (that is, the air-fuel ratio of the air-fuel mixture) with respect to the estimated air-fuel ratio (hereinafter, this error is referred to as “air-fuel ratio error”) includes the steady operation characteristic error of the fuel injection valve and the steady operation of the air flow meter.
- Air-fuel ratio error (hereinafter referred to as “steady air-fuel ratio error”) due to characteristic errors, and when the engine operating state is in a steady state, most of the air-fuel ratio error is a steady air-fuel ratio error. I can say that.
- the instantaneous correction value is sequentially calculated based on the air-fuel ratio error, and this instantaneous correction value is reflected in the newly calculated learning correction value. Therefore, the learning correction value has a function of eliminating the steady air-fuel ratio error. If the learning correction value is calculated more frequently, that is, if learning of the learning correction value is advanced, the learning correction value is a value that can completely eliminate the steady air-fuel ratio error (hereinafter, this value is referred to as a “learning value”). Gradually). Therefore, from the viewpoint of quickly converging the air-fuel ratio of the air-fuel mixture to the target air-fuel ratio, it is preferable that the learning correction value reaches the learning value early. That is, it is preferable to improve the learning speed of the learning correction value.
- a means for setting the learning coefficient to a relatively large value can be considered.
- this has the following disadvantages. That is, when the learning coefficient is fixed to a relatively large constant value, an excessively large instantaneous correction value (that is, an appropriate instantaneous correction that can converge the air-fuel ratio of the mixture to the estimated air-fuel ratio in a stable manner) When an instantaneous correction value that is far from the value is calculated, an excessively large learning addition value (that is, an appropriate learning correction value that can converge the air-fuel ratio of the mixture to the estimated air-fuel ratio in a stable manner) There is a possibility that a learning addition value that causes a far-off learning correction value to be calculated).
- an excessively large learning addition value is calculated, and a new learning correction value is calculated using the learning addition value (that is, the learning correction value is updated), an excessively large learning correction value (that is, the learning correction value is updated). Therefore, a learning correction value far from an appropriate learning correction value that can converge the air-fuel ratio of the air-fuel mixture to the estimated air-fuel ratio with a stable behavior is calculated. Then, the excessively large learning correction value is used for calculating the control parameter correction value, the target fuel injection amount is corrected by the control parameter correction value, and the reference EGR rate is obtained using the corrected target fuel injection amount.
- the air-fuel ratio of the air-fuel mixture changes while exhibiting unstable behavior. become. That is, the control of the air-fuel ratio of the air-fuel mixture becomes unstable. However, it is not preferable that the control of the air-fuel ratio of the air-fuel mixture is unstable. In addition, even if learning of the learning correction value proceeds while the control of the air-fuel ratio of the air-fuel mixture is unstable, the learning correction value cannot reach the learning value quickly (that is, learning of the learning correction value). Speed is not improved). However, if the learning coefficient is fixed to a relatively small constant value, the control of the air-fuel ratio of the air-fuel mixture becomes stable, but the learning correction value cannot reach the learning value quickly.
- the learning coefficient is set to a larger value as the currently used learning correction value is larger.
- a large learning correction value means that the learning correction value is close to the learning value, and if the learning correction value is close to the learning value, the possibility that an excessive instantaneous correction value is calculated is low. Therefore, even if the learning coefficient is calculated as a large value when the learning correction value is large, the possibility that an excessive learning addition value is calculated is low. Therefore, the learning correction value updated by the learning addition value calculated at this time is used for calculation of the fuel injection amount for acquiring the reference EGR rate, and the target based on the reference EGR rate acquired based on the fuel injection amount.
- the smaller the learning correction value currently used the smaller the learning coefficient is set.
- a small learning correction value means that the learning correction value is far from the learning value, and if the learning correction value is far from the learning value, there is a high possibility that an excessive instantaneous correction value is calculated. Therefore, if the learning coefficient is large, there is a high possibility that an excessive learning addition value is calculated.
- the learning correction value updated by the excessive learning addition value is used to calculate the fuel injection amount for acquiring the reference EGR rate, and the target is based on the reference EGR rate acquired based on the fuel injection amount.
- the learning coefficient is set to a smaller value as the learning correction value is smaller. Therefore, even if an excessive instantaneous correction value is calculated, the possibility that an excessive learning addition value is calculated is low. . Therefore, according to the first embodiment, it is sufficiently suppressed that the control of the air-fuel ratio of the air-fuel mixture becomes unstable, while the learning coefficient is set to a value corresponding to the learning correction value. The learning speed of the learning correction value is improved in an appropriate manner.
- a learning coefficient is set in accordance with the contribution of the currently used learning correction value to the newly calculated learning correction value, and thus the learning correction value contribution to the control parameter correction value. It is.
- the first embodiment has the advantage that it is possible to simultaneously ensure the stability of the control of the air-fuel ratio of the air-fuel mixture and improve the learning speed of the learning correction value.
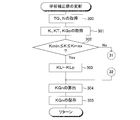
- FIG. 4 An example of this routine is shown in FIG. 4 is a routine executed at a predetermined time interval, that is, a routine executed at a predetermined calculation cycle.
- step 4 is started, first, at step 100, the current target fuel injection amount TQ and the current engine speed N are acquired.
- step 101 the instantaneous correction value KT calculated immediately before the execution of this step (that is, the past time closest to the execution time of this step) is acquired, and the target fuel injection acquired in step 100 is acquired.
- the learning correction value KGp is acquired from the map of FIG.
- the learning coefficient KL is set so that the larger the learning correction value KGp acquired in step 101 is, the larger the value is.
- a new learning correction value KGn is calculated by applying the instantaneous correction value KT and learning correction value KTp acquired in step 101 and the learning coefficient KL set in step 102 to the above equation 6.
- the new learning correction value KGn calculated at step 103 is stored as the learning correction value of the map of FIG. 3 corresponding to the target fuel injection amount TQ and the engine speed N acquired at step 100. The routine ends.
- the learning coefficient setting method of the first embodiment may be any method as long as the learning correction value used at that time is larger and a larger learning coefficient is set.
- the following method may be used. Can be adopted.
- an embodiment adopting this method hereinafter referred to as “second embodiment”.
- the learning coefficient (hereinafter referred to as the learning coefficient of the second embodiment corresponding to the learning coefficient of the first embodiment is referred to as the “first learning coefficient” in the instantaneous correction value calculated sequentially, as shown in the following Expression 7.
- 1 learning coefficient ", the details of which will be described later) (that is, a learning addition value) and a learning correction value that is currently used and a predetermined coefficient (hereinafter referred to as" second learning coefficient ").
- a new learning correction value is calculated by adding together a value obtained by multiplying by a coefficient called “coefficient” (details will be described later).
- Equation 7 “KGn” is “newly calculated learning correction value (ie, updated learning correction value)”, “KT” is “instantaneous correction value”, and “KL1” is “first learning value”. “KGp” is “the currently used learning correction value”, and “KL2” is the “second learning coefficient”.
- the new learning correction value KGn thus calculated is the current target fuel injection amount among the learning correction values KG stored in the map of FIG. It is stored as a learning correction value KG corresponding to TQ and the current engine speed N.
- an instantaneous correction value is calculated based on the air-fuel ratio error ratio, and a learning correction value KG is acquired from the map of FIG. 3 based on the target fuel injection amount TQ and the engine speed N at that time.
- the control parameter correction value K is calculated by applying the learning correction value KG thus obtained and the instantaneous correction value calculated as described above to the above equation 3.
- the absolute value of the instantaneous correction value calculated sequentially is multiplied by the calculation period (that is, the time period for executing the correction learning value calculation).
- the value obtained by multiplying the absolute value of the value obtained by adding the currently used learning correction value to the sequentially calculated instantaneous correction value and the value obtained by multiplying the reference value is calculated as a variable time constant.
- KV is a “variable time constant”
- KT is an “instantaneous correction value”
- TC is an “arithmetic period”
- KG is “the currently used learning correction”.
- Value "and” KB is the” reference value ".
- the reference value I is a value obtained in advance by experiments or the like so that the actual control parameter correction value falls within the allowable error range.
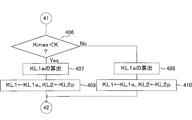
- the first learning coefficient is calculated by dividing the calculation cycle by a value obtained by adding a variable time constant to the calculation cycle, as shown in the following Expression 9.
- the second learning coefficient is calculated by dividing the variable time constant by a value obtained by adding the variable time constant to the calculation cycle.
- “KL1” is the “first learning coefficient”
- “KL2” is the “second learning coefficient”
- “TC” is the “calculation cycle”
- “KV” is “variable” Constant.
- KL1 TC / (TC + KV) (9)
- KL2 KV / (TC + KV) (10)
- the learning correction value reaches the learning value early from the viewpoint of quickly converging the air-fuel ratio of the air-fuel mixture to the target air-fuel ratio. That is, it is preferable to improve the learning speed of the learning correction value.
- a means for setting the first learning coefficient to a relatively large value can be considered.
- this has the following disadvantages. That is, when the first learning coefficient is fixed to a relatively large constant value, if an excessively large instantaneous correction value is calculated, an excessively large learning addition value may be calculated.
- an excessively large learning addition value is calculated and a new learning correction value is calculated using the learning addition value (that is, the learning correction value is updated), an excessively large learning correction value is calculated. Will be. Then, the excessively large learning correction value is used for calculating the control parameter correction value, the target fuel injection amount is corrected by the control parameter correction value, and the reference EGR rate is obtained using the corrected target fuel injection amount.
- the air-fuel ratio of the air-fuel mixture changes while exhibiting unstable behavior. become. That is, the control of the air-fuel ratio of the air-fuel mixture becomes unstable. However, it is not preferable that the control of the air-fuel ratio of the air-fuel mixture is unstable. In addition, even if learning of the learning correction value proceeds while the control of the air-fuel ratio of the air-fuel mixture is unstable, the learning correction value cannot reach the learning value quickly (that is, learning of the learning correction value). Speed is not improved). However, if the first learning coefficient is fixed to a relatively small constant value, the control of the air-fuel ratio of the air-fuel mixture becomes stable, but the learning correction value cannot reach the learning value quickly.
- the variable time constant KV is calculated as a smaller value as the learning correction value KG is larger, as can be seen from Equation 8 above.
- the first learning coefficient KL1 is calculated as a larger value as the variable time constant KV is smaller. That is, the larger the learning correction value KG, the larger the first learning coefficient KL1 is calculated.
- a large learning correction value means that the learning correction value is close to the learning value, and if the learning correction value is close to the learning value, the possibility that an excessive instantaneous correction value is calculated is low. Therefore, even if the first learning coefficient is calculated as a large value when the learning correction value is large, the possibility that an excessive learning addition value is calculated is low.
- the learning correction value updated by the learning addition value calculated at this time is used for calculation of the fuel injection amount for acquiring the reference EGR rate, and the target based on the reference EGR rate acquired based on the fuel injection amount. Even if the EGR rate is set and this target EGR rate is used to control the operating state of the EGR control valve (that is, the EGR control valve opening), it is sufficient that the control of the air-fuel ratio of the air-fuel mixture becomes unstable. On the other hand, since the first learning coefficient is large, the learning speed of the learning correction value is sufficiently improved.
- the smaller the learning correction value the smaller the first learning coefficient is calculated.
- a small learning correction value means that the learning correction value is far from the learning value, and if the learning correction value is far from the learning value, there is a high possibility that an excessive instantaneous correction value is calculated. Therefore, if the first learning coefficient is large, there is a high possibility that an excessive learning addition value is calculated.
- the learning correction value updated by the excessive learning addition value is used to calculate the fuel injection amount for acquiring the reference EGR rate, and the target is based on the reference EGR rate acquired based on the fuel injection amount.
- the control of the air-fuel ratio of the air-fuel mixture becomes unstable.
- the first learning coefficient is calculated as a smaller value as the learning correction value is smaller, an excessive learning addition value may be calculated even if an excessive instantaneous correction value is calculated. Is low. Therefore, according to the second embodiment, it is sufficiently suppressed that the control of the air-fuel ratio of the air-fuel mixture becomes unstable, while the first learning coefficient is set to a value corresponding to the learning correction value. Therefore, the learning speed of the learning correction value is improved in an appropriate manner.
- the contribution of the currently used learning correction value to the newly calculated learning correction value and thus the contribution of the learning correction value to the control parameter correction value.
- the first learning coefficient corresponding to is calculated.
- the second embodiment has the advantage that it is possible to simultaneously ensure the stability of the control of the air-fuel ratio of the air-fuel mixture and improve the learning speed of the learning correction value.
- variable time constant KV calculated from 8 is determined whether the variable time constant KV calculated from 8 is larger than the upper limit value, and when the variable time constant calculated from the above equation 8 is larger than the upper limit value, the upper limit value is set as the first learning coefficient.
- it may be adopted as a variable time constant that is actually used for calculating the second learning coefficient. That is, the variable time constant calculated from Equation 8 may be guarded to the upper limit value.
- variable time constant calculated from the above equation 8 is less than or equal to the upper limit value
- the calculated variable time constant is adopted as the variable time constant actually used for calculating the first learning coefficient and the second learning coefficient. That's fine.
- the variable time constant KV calculated from Expression 8 is smaller than the lower limit value.
- variable time constant calculated from Equation 8 may be guarded to the lower limit value.
- the calculated variable time constant is adopted as the variable time constant actually used for calculating the first learning coefficient and the second learning coefficient. That's fine.
- the second learning coefficient may be fixed to a constant value.
- the first learning coefficient as large as possible is calculated on condition that the control parameter correction value is within the allowable correction value range. It is preferable to set a reference value.
- the routine shown in FIG. 5 is a routine executed at a predetermined time interval, that is, a routine executed at a predetermined calculation cycle.
- step 5 is started, first, at step 200, the current target fuel injection amount TQ and the current engine speed N are acquired.
- step 201 the instantaneous correction value KT calculated immediately before the execution of this step (that is, the past time closest to the execution time of this step) is acquired, and the target fuel injection acquired in step 200 is acquired.
- the learning correction value KGp is acquired from the map of FIG.
- the variable time constant KV is calculated by applying the instantaneous correction value KT and the learning correction value KGp acquired in step 201 to the above equation 8.
- step 203 the first learning coefficient KL1 is calculated by applying the variable time constant KV calculated in step 202 to the above equation 9, and the variable time constant KV calculated in step 202 is calculated using the equation 10 above. Is applied to the second learning coefficient KL2.
- step 204 the instantaneous correction value KT and learning correction value KTp acquired in step 201 and the first learning coefficient KL1 and the second learning coefficient KL2 calculated in step 203 are applied to the above equation 7 to A correct learning correction value KGn is calculated.
- step 205 the new learning correction value KGn calculated at step 204 is stored as the learning correction value of the map of FIG. 3 corresponding to the target fuel injection amount TQ and the engine speed N acquired at step 200. The routine ends.
- the control parameter correction value is calculated using the newly calculated learning correction value, and the target fuel injection amount and the engine speed corrected by the control parameter correction value are calculated.
- the reference EGR rate corresponding to the number is acquired from the map of FIG. 2C, the acquired reference EGR rate is set as the target EGR rate, and the operation state of the EGR control valve according to the set target EGR rate ( That is, when the opening degree of the EGR control valve is controlled, the learning coefficient is set depending on whether or not the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio. It is an idea.
- the target EGR rate is set as in the first embodiment. That is, as shown in the above equation 2, the fuel injection amount obtained by multiplying the target fuel injection amount set during engine operation by the control parameter correction value is calculated from the map of FIG.
- the reference EGR rate is obtained from the map shown in FIG. 2C as the engine speed for obtaining the reference EGR rate from the map shown in FIG. 2C. Is done. Then, the acquired reference EGR rate is set as the target EGR rate.
- control parameter correction value is calculated as in the first embodiment. That is, as shown in Equation 3, the control parameter correction value K is calculated by adding the instantaneous correction value KT, the learning correction value KG, and “1”.
- the instantaneous correction value is calculated as in the first embodiment. That is, as shown in the above equation 4, a value (that is, an air-fuel ratio error ratio) Raf obtained by dividing the estimated air-fuel ratio AFe by the detected air-fuel ratio AFd is calculated.
- the estimated air-fuel ratio AFe is obtained by dividing the intake air amount Ga by a value obtained by multiplying the target fuel injection amount TQ by the control parameter correction value K as shown in the above equation 5. Value.
- the reference EGR rate is acquired so that the air-fuel ratio error ratio becomes “1”.
- the control parameter correction value that can set the air-fuel ratio error ratio to “1” by correcting the control parameter correction value currently used for correcting the target fuel injection amount for calculating the fuel injection amount used for The correction value is calculated as an instantaneous correction value.
- the learning correction value is calculated as in the first embodiment. That is, as shown in the above equation 6, the learning addition value obtained by multiplying the successively calculated instantaneous correction value KT by the learning coefficient KL and the currently used learning correction value KGp are added together. A new learning correction value KGn is calculated.
- the new learning correction value calculated in this way is the current target fuel injection amount and the current engine speed among the learning correction values stored in the map of FIG. Stored as the corresponding learning correction value.
- an instantaneous correction value is calculated based on the air-fuel ratio error ratio as described above, and a learning correction value is obtained from the map of FIG. 3 based on the target fuel injection amount and engine speed at that time. Is done.
- the control parameter correction value is calculated by applying the learning correction value thus obtained and the instantaneous correction value calculated as described above to Equation 3 above.
- the learning coefficient of the third embodiment will be described.
- a prescribed learning coefficient is preset.
- the learning correction value is updated using the prescribed learning coefficient
- the control parameter correction value is calculated using the updated learning correction value, and is corrected by the calculated control parameter correction value.
- the reference EGR rate corresponding to the target fuel injection amount and the engine speed is acquired from the map of FIG. 2C, the acquired reference EGR rate is set as the target EGR rate, and the set target EGR rate is set.
- Range of the control parameter correction value in which the air-fuel ratio of the air-fuel mixture can be controlled in a stable manner toward the estimated air-fuel ratio when the operating state of the EGR control valve (that is, the EGR control valve opening) is controlled according to (Hereinafter, this range is referred to as “allowable correction value range”) is obtained in advance by experiments or the like.
- control parameter correction value is within the allowable correction value range.
- the specified learning coefficient is employed as it is as the learning coefficient actually used for updating the learning correction value.
- the control parameter correction value when it is determined that the control parameter correction value is not within the allowable correction value range, whether or not the control parameter correction value is larger than the upper limit value of the allowable correction value range (hereinafter, this upper limit value is referred to as “allowable upper limit value”). Is determined.
- a learning coefficient that can match the control parameter correction value with the allowable upper limit value is used as a learning coefficient that is actually used for updating the learning correction value.
- the specified learning coefficient is corrected so that the control parameter correction value matches the allowable upper limit value, and this corrected learning coefficient is used as the learning correction value. It is adopted as a learning coefficient that is actually used for updating.
- the control parameter correction value is not larger than the allowable upper limit value, that is, the control parameter correction value is smaller than the lower limit value of the allowable correction value range (hereinafter, this lower limit value is referred to as “allowable lower limit value”).
- this lower limit value is referred to as “allowable lower limit value”.
- a learning coefficient that can make the control parameter correction value coincide with the allowable lower limit value is adopted as a learning coefficient that is actually used for updating the learning correction value.
- the control parameter correction value is smaller than the allowable lower limit value, the specified learning coefficient is corrected so that the control parameter correction value matches the allowable lower limit value, and this corrected learning coefficient is actually used for updating the learning correction value. Adopted as a learning coefficient.
- the control parameter correction value when the control parameter correction value is not within the allowable correction value range, that is, when the learning correction value is updated using a specified learning coefficient, the air-fuel ratio of the mixture is changed to the estimated air-fuel ratio.
- the specified learning coefficient is corrected so that the control parameter correction value is within the allowable correction value range, and the corrected learning coefficient is used to update the learning correction value. It is adopted as a learning coefficient that is actually used. More specifically, when the control parameter correction value is larger than the allowable upper limit value and therefore the control parameter correction value is not within the allowable correction value range, the specified learning is performed so that the control parameter correction value matches the allowable upper limit value.
- the coefficient is corrected, and the corrected learning coefficient is adopted as a learning coefficient actually used for updating the learning correction value.
- the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio. That is, stable control of the air-fuel ratio of the air-fuel mixture is ensured.
- the control parameter correction value is smaller than the allowable lower limit value, and therefore the control parameter correction value is not within the allowable correction value range
- the specified learning coefficient is corrected so that the control parameter correction value matches the allowable lower limit value.
- the corrected learning coefficient is employed as a learning coefficient that is actually used for updating the learning correction value.
- the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio. That is, the stability of the control of the air-fuel ratio of the air-fuel mixture is ensured.
- the specified learning coefficient is corrected only when the control parameter correction value is not within the allowable correction value range. That is, the specified learning coefficient is corrected only when the control of the air-fuel ratio of the air-fuel mixture is not ensured. Therefore, as a whole, the learning coefficient actually used for updating the learning correction value is set to a learning coefficient that can maintain the learning speed of the learning correction value high. For this reason, according to the third embodiment, the learning speed of the learning correction value is improved as a whole.
- the learning coefficient according to the contribution of the currently used learning correction value to the newly calculated learning correction value, and hence the learning correction value contribution to the control parameter correction value, is calculated. It is.
- the third embodiment has an advantage that it is possible to simultaneously achieve the stability of the control of the air-fuel ratio of the air-fuel mixture and the improvement of the learning speed of the learning correction value.
- the specified learning coefficient when the control parameter correction value is larger than the allowable upper limit value, the specified learning coefficient is corrected so that the control parameter correction value matches the allowable upper limit value.
- the control parameter The prescribed learning coefficient may be corrected so that the correction value is a value within the allowable correction value range.
- the specified learning coefficient when the control parameter correction value is smaller than the allowable lower limit value, the specified learning coefficient is corrected so that the control parameter correction value matches the allowable lower limit value.
- control parameter correction value when the control parameter correction value is smaller than the allowable lower limit value, the control parameter The prescribed learning coefficient may be corrected so that the correction value is a value within the allowable correction value range.
- the specified learning coefficient is corrected only when the control parameter correction value is not within the allowable correction value range.
- the learning coefficient may be corrected within a range in which the control parameter correction value is within the allowable correction value. In this case, from the viewpoint of improving the learning speed of the learning correction value, when the control parameter correction value is within the allowable correction value range, the largest learning coefficient that can fit the control parameter correction value within the allowable correction value range. It is preferable to correct the specified learning coefficient so as to be the learning coefficient.
- routines that are executed at predetermined time intervals that is, routines that are executed at a predetermined calculation cycle.
- step 300 the current target fuel injection amount TQ and the current engine speed N are acquired.
- step 301 the control parameter correction value K and the instantaneous correction value KT calculated immediately before the execution of this step (that is, the past time closest to the execution time of this step) are acquired. Based on the acquired target fuel injection amount TQ and the engine speed N, a learning correction value KGp is acquired from the map of FIG.
- step 302 it is determined whether or not the control parameter correction value K acquired in step 301 is within an allowable correction value range (Kmin ⁇ K ⁇ Kmax).
- the routine proceeds to step 303.
- the routine proceeds to step 306 in FIG.
- step 302 When it is determined in step 302 that the control parameter correction value K is within the allowable correction value range and the routine proceeds to step 303, the specified learning coefficient KL1p is input to the learning coefficient KL1, and the routine proceeds to step 304.
- step 306 the control parameter correction value K acquired in step 301 is the upper limit value of the allowable correction value range. It is determined whether or not it is larger than Kmax (Kmax ⁇ K). Here, when it is determined that Kmax ⁇ K, the routine proceeds to step 307. On the other hand, if it is determined that Kmax ⁇ K is not satisfied, the routine proceeds to step 309.
- step 306 When it is determined in step 306 that Kmax ⁇ K and the routine proceeds to step 307, the specified learning coefficient is corrected so that the control parameter correction value K acquired in step 301 can be made to coincide with the upper limit value Kmax. Thus, the corrected learning coefficient KLa is calculated.
- step 308 the corrected learning coefficient KLa calculated at step 307 is input to the learning coefficient KL, and the routine proceeds to step 304.
- step 306 If it is determined in step 306 that Kmax ⁇ K is not satisfied, that is, if the control parameter correction value K acquired in step 301 is smaller than the lower limit value Kmin of the allowable correction value range and the routine proceeds to step 309, the control parameter correction value K is acquired in step 301
- the corrected learning coefficient KLa is calculated by correcting the specified learning coefficient so that the control parameter correction value K thus made can be matched with the lower limit value Kmin.
- step 310 the corrected learning coefficient KLa calculated at step 309 is input to the learning coefficient KL, and the routine proceeds to step 304.
- a new learning correction value KGn is calculated. More specifically, when the routine proceeds from step 303 to step 304, the learning coefficient KL to which the specified learning coefficient KLp is input in step 303 and the instantaneous correction value KT and the learning correction value acquired in step 301 are stored. A new learning correction value KGn is calculated by applying KGp to Equation 6 above. When the routine proceeds from step 308 to step 304, the learning coefficient KL to which the corrected learning coefficient KLa is input in step 308 and the instantaneous correction value KT and the learning correction value KGp acquired in step 301 are expressed by the following equation (6). By applying, a new learning correction value KGn is calculated.
- step 304 the learning coefficient KL to which the corrected learning coefficient KLa is input in step 310 and the instantaneous correction value KT and the learning correction value KGp acquired in step 301 are expressed by the above equation 6.
- a new learning correction value KGn is calculated.
- step 305 the new learning correction value KGn calculated at step 304 is stored in the electronic control unit corresponding to the target fuel injection amount TQ and the engine speed N acquired at step 300.
- a control parameter correction value is calculated using a newly calculated learning correction value, and the target fuel injection amount and the engine speed corrected by the control parameter correction value are calculated.
- the reference EGR rate corresponding to the number is acquired from the map of FIG. 2C, the acquired reference EGR rate is set as the target EGR rate, and the operation state of the EGR control valve according to the set target EGR rate ( That is, when the opening degree of the EGR control valve is controlled, the first learning coefficient is set according to whether or not the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio.
- the target EGR rate is set as in the second embodiment. That is, as shown in the above equation 2, the fuel injection amount obtained by multiplying the target fuel injection amount set during engine operation by the control parameter correction value is calculated from the map of FIG.
- the reference EGR rate is obtained from the map shown in FIG. 2C as the engine speed for obtaining the reference EGR rate from the map shown in FIG. 2C. Is done. Then, the acquired reference EGR rate is set as the target EGR rate.
- control parameter correction value is calculated as in the second embodiment. That is, as shown in Equation 3, the control parameter correction value K is calculated by adding the instantaneous correction value KT, the learning correction value KG, and “1”.
- the instantaneous correction value is calculated as in the second embodiment. That is, as shown in the above equation 4, a value (that is, an air-fuel ratio error ratio) Raf obtained by dividing the estimated air-fuel ratio AFe by the detected air-fuel ratio AFd is calculated.
- the estimated air-fuel ratio AFe is obtained by dividing the intake air amount Ga by a value obtained by multiplying the target fuel injection amount TQ by the control parameter correction value K as shown in the above equation 5. Value.
- the reference EGR rate is acquired so that the air-fuel ratio error ratio becomes “1”.
- the control parameter correction value that can set the air-fuel ratio error ratio to “1” by correcting the control parameter correction value currently used for correcting the target fuel injection amount for calculating the fuel injection amount used for The correction value is calculated as an instantaneous correction value.
- the learning correction value is calculated as in the second embodiment. That is, as shown in the above equation 7, the learning addition value obtained by multiplying the sequentially calculated instantaneous correction value KT by the first learning coefficient KL1 and the currently used learning correction value KGp are subjected to the second learning.
- a new learning correction value KGn is calculated by adding the value obtained by multiplying the coefficient KL2.
- the new learning correction value thus calculated is the current target fuel injection amount and the current learning correction value stored in the map of FIG. Is stored as a learning correction value corresponding to the engine speed.
- an instantaneous correction value is calculated based on the air-fuel ratio error ratio, and a learning correction value is acquired from the map of FIG. 3 based on the target fuel injection amount and engine speed at that time.
- the control parameter correction value is calculated by applying the learning correction value thus obtained and the instantaneous correction value calculated as described above to Equation 3 above.
- a value obtained by dividing the calculation cycle by a value obtained by adding a fixed time constant to the calculation cycle is set in advance as a prescribed first learning coefficient.
- a value obtained by dividing the fixed time constant by a value obtained by adding the fixed time constant to the calculation cycle is preset as a prescribed second learning coefficient.
- KL1 is the “specified first learning coefficient”
- KL2 is the “specified second learning coefficient”
- TC is the “calculation cycle”
- KF Is the “fixed time constant”.
- the fixed time constant is a constant value regardless of the value of the learning correction value, unlike the variable time constant of the first embodiment.
- KL1 TC / (TC + KF) (11)
- KL2 KF / (TC + KF) (12)
- the learning correction value is updated using the predetermined first learning coefficient and the predetermined second learning coefficient set in advance as described above, and thus the updated learning correction value is used.
- a control parameter correction value is calculated, and a reference EGR rate corresponding to the target fuel injection amount and the engine speed corrected by the calculated control parameter correction value is acquired from the map of FIG.
- the acquired reference EGR rate is set to the target EGR rate, and the operation state of the EGR control valve (that is, the EGR control valve opening) is controlled according to the set target EGR rate, the air-fuel ratio of the mixture is changed.
- a range of control parameter correction values that can be controlled with a stable behavior toward the estimated air-fuel ratio hereinafter, this range is referred to as “allowable correction value range” is obtained in advance by experiments or the like.
- the prescribed first learning coefficient is employed as it is as the first learning coefficient that is actually used for updating the learning correction value.
- the control parameter correction value when it is determined that the control parameter correction value is not within the allowable correction value range, whether or not the control parameter correction value is larger than the upper limit value of the allowable correction value range (hereinafter, this upper limit value is referred to as “allowable upper limit value”). Is determined.
- the first learning coefficient that can match the control parameter correction value with the allowable upper limit value is actually used for updating the learning correction value.
- One learning coefficient is adopted. That is, when it is determined that the control parameter correction value is larger than the allowable upper limit value, the specified first learning coefficient is corrected so that the control parameter correction value matches the allowable upper limit value, and the corrected first learning coefficient is corrected. Is adopted as the first learning coefficient that is actually used for updating the learning correction value.
- the control parameter correction value when it is determined that the control parameter correction value is not larger than the allowable upper limit value, that is, the control parameter correction value is smaller than the lower limit value of the allowable correction value range (hereinafter, this lower limit value is referred to as “allowable lower limit value”).
- the first learning coefficient that can match the control parameter correction value with the allowable lower limit value is employed as the first learning coefficient that is actually used for updating the learning correction value. That is, when the control parameter correction value is smaller than the allowable lower limit value, the specified first learning coefficient is corrected so that the control parameter correction value matches the allowable lower limit value, and the corrected first learning coefficient is used as the learning correction value. This is employed as the first learning coefficient that is actually used for updating.
- the specified second learning coefficient is used as it is as the second learning coefficient that is actually used for updating the learning correction value. Adopted.
- the air-fuel ratio of the air-fuel mixture is estimated.
- the specified first learning coefficient is corrected so that the control parameter correction value is within the allowable correction value range, and the corrected first learning coefficient is It is adopted as the first learning coefficient that is actually used for updating the learning correction value. More specifically, when the control parameter correction value is larger than the allowable upper limit value, and therefore, when the control parameter correction value is not within the allowable correction value range, the control parameter correction value is set to match the allowable upper limit value.
- One learning coefficient is corrected, and the corrected first learning coefficient is adopted as the first learning coefficient that is actually used for updating the learning correction value.
- the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio. That is, stable control of the air-fuel ratio of the air-fuel mixture is ensured.
- the specified first learning coefficient is set so that the control parameter correction value matches the allowable lower limit value.
- the corrected first learning coefficient is adopted as the first learning coefficient that is actually used for updating the learning correction value.
- the air-fuel ratio of the air-fuel mixture can be controlled with a stable behavior toward the estimated air-fuel ratio. That is, the stability of the control of the air-fuel ratio of the air-fuel mixture is ensured.
- the specified first learning coefficient is corrected only when the control parameter correction value is not within the allowable correction value range. That is, the specified first learning coefficient is corrected only when the control of the air-fuel ratio of the air-fuel mixture is not ensured. Accordingly, as a whole, the first learning coefficient actually used for updating the learning correction value is set to the first learning coefficient that can maintain the learning speed of the learning correction value high. For this reason, according to the fourth embodiment, the learning speed of the learning correction value is improved as a whole.
- the first learning coefficient corresponding to the contribution of the currently used learning correction value to the newly calculated learning correction value, and hence the contribution of the learning correction value to the control parameter correction value, is obtained. It is calculated.
- the fourth embodiment has an advantage that it is possible to simultaneously achieve the stability of control of the air-fuel ratio of the air-fuel mixture and the improvement of the learning speed of the learning correction value.
- the specified first learning coefficient is corrected so that the control parameter correction value matches the allowable upper limit value.
- the control parameter The prescribed first learning coefficient may be corrected so that the correction value falls within the allowable correction value range.
- the specified first learning coefficient is corrected so that the control parameter correction value matches the allowable lower limit value.
- control parameter correction value when the control parameter correction value is smaller than the allowable lower limit value, the control parameter The prescribed first learning coefficient may be corrected so that the correction value falls within the allowable correction value range.
- the specified first learning coefficient is corrected when the control parameter correction value is larger than the allowable upper limit value.
- the specified second learning coefficient may be corrected when the control parameter correction value is larger than the allowable upper limit value.
- the specified first learning coefficient and the specified second learning coefficient are corrected so that the control parameter correction value matches the allowable upper limit value.
- the corrected first learning coefficient and second learning coefficient are respectively employed as the first learning coefficient and the second learning coefficient that are actually used for updating the learning correction value.
- the specified first learning coefficient and the specified second learning coefficient are corrected so that the control parameter correction value matches the allowable lower limit value.
- the 1 learning coefficient and the second learning coefficient are respectively employed as the first learning coefficient and the second learning coefficient that are actually used for updating the learning correction value.
- the specified first learning coefficient is corrected only when the control parameter correction value is not within the allowable correction value range.
- the first learning coefficient may be corrected within a range in which the control parameter correction value is within the allowable correction value.
- the control parameter correction value when the control parameter correction value is within the allowable correction value range, the first learning coefficient that can fit the control parameter correction value within the allowable correction value range. It is preferable to correct the prescribed first learning coefficient so as to be the largest first learning coefficient.
- routines of FIGS. 8 and 9 are routines executed at predetermined time intervals, that is, routines executed at a predetermined calculation cycle.
- step 400 the current target fuel injection amount TQ and the current engine speed N are acquired.
- step 401 the control parameter correction value K and the instantaneous correction value KT calculated immediately before the execution of this step (that is, the past time closest to the execution time of this step) are acquired. Based on the acquired target fuel injection amount TQ and the engine speed N, a learning correction value KGp is acquired from the map of FIG.
- step 402 it is determined whether or not the control parameter correction value K acquired at step 401 is within the allowable correction value range (Kmin ⁇ K ⁇ Kmax).
- the routine proceeds to step 403.
- the routine proceeds to step 406 in FIG.
- step 403 When it is determined in step 402 that the control parameter correction value K is within the allowable correction value range and the routine proceeds to step 403, the specified first learning coefficient KL1p is input to the first learning coefficient KL1 and the specified first learning coefficient KL1.
- the second learning coefficient KL2p is input to the second learning coefficient KL2, and the routine proceeds to step 404.
- step 406 the control parameter correction value K acquired in step 401 is the upper limit value of the allowable correction value range. It is determined whether or not it is larger than Kmax (Kmax ⁇ K).
- Kmax ⁇ K the routine proceeds to step 407.
- Kmax ⁇ K the routine proceeds to step 409.
- step 406 When it is determined in step 406 that Kmax ⁇ K and the routine proceeds to step 407, the prescribed first learning coefficient is set so that the control parameter correction value K acquired in step 401 can be made to coincide with the upper limit value Kmax. As a result of the correction, the corrected first learning coefficient KL1a is calculated.
- step 408 the corrected first learning coefficient KL1a calculated in step 407 is input to the first learning coefficient KL1, and the specified second learning coefficient KL2p is input to the second learning coefficient KL2, and the routine is stepped. Proceed to 404.
- step 406 If it is determined in step 406 that Kmax ⁇ K is not satisfied, that is, the control parameter correction value K acquired in step 401 is smaller than the lower limit value Kmin of the allowable correction value range, and the routine proceeds to step 409, the control parameter correction value K is acquired in step 401.
- the corrected first learning coefficient KL1a is calculated by correcting the prescribed first learning coefficient so that the control parameter correction value K thus made can be matched with the lower limit value Kmin.
- step 410 the corrected first learning coefficient KL1a calculated in step 409 is input to the first learning coefficient KL1, and the prescribed second learning coefficient KL2p is input to the second learning coefficient KL2, and the routine is stepped. Proceed to 404.
- a new learning correction value KGn is calculated. More specifically, when the routine proceeds from step 403 to step 404, the first learning coefficient KL1 to which the specified first learning coefficient KL1p is input in step 403 and the second learning coefficient KL2p specified in step 403 are input. A new learning correction value KGn is calculated by applying the second learning coefficient KL2 to which is input and the instantaneous correction value KT and the learning correction value KGp acquired in step 401 to the above equation 7. When the routine proceeds from step 408 to step 404, the second learning in which the first learning coefficient KL1 to which the corrected first learning coefficient KL1a is input in step 408 and the second learning coefficient KL1p specified in step 408 is input.
- a new learning correction value KGn is calculated by applying the coefficient KL2 and the instantaneous correction value KT and learning correction value KGp acquired in step 401 to the above equation 7.
- the routine proceeds from step 410 to step 404, the second learning in which the corrected first learning coefficient KL1a is input in step 410 and the second learning coefficient KL1p specified in step 410 is input.
- a new learning correction value KGn is calculated by applying the coefficient KL2 and the instantaneous correction value KT and learning correction value KGp acquired in step 401 to the above equation 7.
- the new learning correction value KGn calculated at step 404 is stored in the electronic control unit corresponding to the target fuel injection amount TQ and the engine speed N acquired at step 400.
- the above-described embodiment is an embodiment in which the present invention is applied to a control device that executes control for matching the air-fuel ratio of the air-fuel mixture with the estimated air-fuel ratio by controlling the EGR rate with the EGR control valve.
- the present invention can also be applied to a control device that executes control for matching the air-fuel ratio of the air-fuel mixture to the estimated air-fuel ratio by controlling the intake air amount with a throttle valve in an internal combustion engine that does not include an EGR device.
- an embodiment in which the technical idea of the first embodiment is applied to such a control device hereinafter referred to as “fifth embodiment” will be described.
- the structure of 5th Embodiment which is not mentioned in the following description is the same as the structure of 1st Embodiment.
- FIG. 10 shows an internal combustion engine to which the control device of the fifth embodiment is applied.
- the internal combustion engine shown in FIG. 10 is the same as the internal combustion engine shown in FIG. 1 except that it does not include an EGR device. Further, since the internal combustion engine to which the control device of the fifth embodiment is applied does not include an EGR device, unlike the first embodiment, the EGR control valve is not controlled.
- an optimal fuel injection amount is obtained in advance by experiments or the like according to the depression amount of the accelerator pedal.
- the obtained fuel injection amount is stored in the electronic control unit as a reference fuel injection amount Qb in the form of a map of a function of the accelerator pedal depression amount Dac as shown in FIG.
- the reference fuel injection amount Qb corresponding to the accelerator pedal depression amount Dac at that time is acquired from the map of FIG. 11A, and the acquired reference fuel injection amount Qb becomes the target fuel injection amount. Is set.
- a command signal is supplied from the electronic control unit to the fuel injection valve so that the fuel of the target fuel injection amount thus set is injected from the fuel injection valve.
- the reference fuel injection amount Qb increases as the accelerator pedal depression amount Dac increases.
- the operating state of the internal combustion engine shown in FIG. 10 is maintained in a steady operation state (that is, a state in which the fuel injection amount and the engine speed are kept constant) and the environment surrounding the internal combustion engine.
- Parameters that affect the engine operating state for example, atmospheric pressure, atmospheric temperature, internal combustion engine temperature, etc., hereinafter referred to as “environmental parameters” have a specific value.
- an appropriate throttle valve opening corresponding to the fuel injection amount and the engine speed is obtained in advance by experiments or the like. Then, as shown in FIG.
- the obtained throttle valve opening is set as a reference throttle valve opening Dthb in the form of a map of a function of the fuel injection amount Q and the engine speed N. Is remembered.
- the reference throttle valve opening Dthb increases as the fuel injection amount Q increases, and the reference throttle valve opening Dthb increases as the engine speed N increases.
- the fuel injection amount obtained by multiplying the target fuel injection amount set during engine operation by the control parameter correction value is set as a reference throttle from the map of FIG.
- the fuel injection amount Q for obtaining the valve opening degree Dthb is set as the engine speed N for obtaining the reference throttle valve opening degree Dthb from the map of FIG. )
- the fuel injection amount obtained by correcting the target fuel injection amount set during engine operation with the control parameter correction value is used to obtain the reference throttle valve opening Dthb from the map of FIG.
- “Q” is “a fuel supply amount used for obtaining the reference throttle valve opening from the map of FIG. 11B”
- TQ is a “target fuel injection amount”
- “K” is a “control parameter correction value”.
- the reference throttle valve opening Dthb acquired from the map of FIG. 11B is set as the target throttle valve opening.
- a control signal for driving the throttle valve actuator is supplied from the electronic control device so as to drive the throttle valve so that the throttle valve opening becomes the target throttle valve opening TDth thus set.
- control parameter correction value is calculated according to Equation 3 as in the first embodiment.
- the air-fuel ratio error ratio is calculated according to Equation 4 as in the first embodiment.
- the reference throttle valve opening degree is set so that the air-fuel ratio error ratio becomes “1”.
- Parameter correction capable of setting the air-fuel ratio error ratio to "1” by correcting the control parameter correction value currently used for correcting the target fuel injection amount for calculating the fuel injection amount used for obtaining A correction value for the value is calculated as an instantaneous correction value.
- the air-fuel ratio error ratio is set to “1” by correcting the current target fuel injection amount on the assumption that the target fuel injection amount is corrected by the control parameter correction value currently used for correcting the fuel supply amount.
- a correction value for the target fuel injection amount that can be calculated is calculated as an instantaneous correction value.
- a new learning correction value is calculated according to Equation 6 as in the first embodiment.
- the new learning correction value KGn calculated in this way is the learning correction corresponding to the current target fuel injection amount TQ and the current engine speed N among the learning correction values KG stored in the map of FIG. Stored as value KG.
- the calculation and storage of the new learning correction value corresponds to the update of the learning correction value.
- the instantaneous correction value is calculated based on the air-fuel ratio error ratio as described above, and the learning correction value is calculated from the map of FIG. 12 based on the target fuel injection amount TQ and the engine speed N at that time.
- KG is acquired.
- the control parameter correction value K is calculated by applying the learning correction value KG thus obtained and the instantaneous correction value calculated as described above to Equation 3. Note that the initial value of the learning correction value KG stored in the map of FIG. 12 is “0”.
- the learning coefficient of the fifth embodiment is set to a larger value as the learning correction value used in the current actuator is larger.
- the learning coefficient is a value of “0” or more and a value of “1” or less.
- the learning coefficient is set to a larger value as the currently used learning correction value is larger. That is, a learning coefficient is set in accordance with the contribution degree of the currently used learning correction value to the newly calculated learning correction value, and consequently the contribution degree of the learning correction value to the control parameter correction value.
- the fifth embodiment simultaneously ensures the stability of the air-fuel ratio control of the air-fuel mixture and improves the learning speed of the learning correction value. There is an advantage that can be achieved.
- the second embodiment of the present invention is a control device that executes control for matching the air-fuel ratio of the air-fuel mixture to the estimated air-fuel ratio by controlling the intake air amount with a throttle valve in an internal combustion engine that does not include an EGR device.
- the technical idea of the third embodiment or the fourth embodiment can also be applied.
- routine shown in FIG. 4 can be adopted as a routine for executing the update of the learning correction value of the fifth embodiment.
- a control device that executes control for making the air-fuel ratio of the air-fuel mixture coincide with the estimated air-fuel ratio by controlling the intake air amount through control of the EGR rate by the EGR control valve. It is an embodiment to which the present invention is applied. However, the present invention can also be applied to a control device that executes control of the intake air amount using a throttle valve in addition to control of the intake air amount via control of the EGR rate using the EGR control valve.
- control parameter correction values in the first to fourth embodiments are correction values for correcting the target fuel injection amount in order to obtain the fuel injection amount for obtaining the reference EGR rate.
- this control parameter correction value may be a correction value for correcting the reference EGR rate acquired using the target fuel injection amount as the fuel injection amount for acquiring the reference EGR rate as it is.
- the reference EGR rate corrected by the control parameter correction value is set as the target EGR rate.
- control parameter correction value of the fifth embodiment is a correction value for correcting the target fuel injection amount in order to obtain the fuel injection amount for obtaining the reference throttle valve opening.
- control parameter correction value may be a correction value for correcting the reference throttle valve opening acquired using the target fuel injection amount as the fuel injection amount for acquiring the reference throttle valve opening as it is. In this case, the reference throttle valve opening corrected by the control parameter is set to the target throttle valve opening.
- the instantaneous correction value is a so-called PI term.
- the above-described embodiment is an embodiment in which the present invention is applied to a compression ignition type internal combustion engine, but the present invention is also applicable to a spark ignition type internal combustion engine (so-called gasoline engine).
Abstract
本発明は、制御量が目標制御量に一致するように制御対象の目標動作状態を設定するために用いられる制御パラメータ値を補正する制御パラメータ補正値によって補正された制御パラメータ値を用いて設定される目標動作状態に従って制御対象を制御する内燃機関の制御装置に関する。本発明では、瞬時補正値(KT)を制御量偏差に基づいて算出する制御と学習係数(KL)によって瞬時補正値を補正して得られる値を積算することによって学習補正値KGを算出する制御とが実行され、新たに算出される瞬時補正値と既に算出されている学習補正値とに基づいて制御パラメータ補正値が算出される。そして、本発明では、制御量の目標制御量追従形態が許容追従形態となる許容制御パラメータ補正値範囲が予め定められており、制御パラメータ補正値が許容制御パラメータ補正値範囲内に収まるように学習係数が設定される。
Description
本発明は内燃機関の制御装置に関する。
特許文献1に排気再循環装置(以下この装置を「EGR装置」という)を備えた内燃機関が記載されている。このEGR装置は内燃機関の燃焼室から排気通路に排出された排気ガスを吸気通路に導入することによって同排気ガスを燃焼室に供給する(つまり、再循環する)装置である。以下、EGR装置によって燃焼室に供給される排気ガスを「EGRガス」と称し、燃焼室に供給されるEGRガスの量を「EGRガス量」と称する。
特許文献1に記載のEGR装置はEGR制御弁を有する。このEGR制御弁はその開度が変更可能に構成されている。EGR制御弁の開度を変更することによってEGRガス量を変更することができる。すなわち、EGR制御弁の開度を制御することによってEGRガス量を制御することができる。そして、EGRガスは燃焼室における燃料の燃焼によって生成される物質(特に、窒素酸化物)の量を低減する。つまり、EGRガスは燃焼室から排出される排気エミッションを低減する。
ところで、排気エミッションを最適に低減することができるEGRガス量は機関運転状態(すなわち、内燃機関の運転状態)に応じて異なる。特許文献1に記載の内燃機関では、機関運転状態に応じて排気エミッションを最適に低減することができるEGRガス量を実験等によって予め求め、これら求められたEGRガス量を目標EGRガス量として内燃機関の電子制御装置に記憶させておき、機関運転中(すなわち、内燃機関の運転中)に機関運転状態に応じて目標EGRガス量を設定し、この設定された目標EGRガス量に実際のEGRガス量が一致するようにEGR制御弁の開度を制御するようにしている。
ところで、上述したようにEGRガス量を目標EGRガス量に制御する場合のEGR制御弁の制御として、実際のEGRガス量と目標EGRガス量との間の偏差を算出し、この偏差が零になるようにEGR制御弁に与えられる操作量の算出に影響するパラメータの値(以下この値を「制御パラメータ値」という)を補正するための補正値(以下この補正値を「瞬時補正値」という)を算出し、この瞬時補正値によって制御パラメータ値を補正し、この補正された制御パラメータ値を用いてEGR制御弁に与えられる操作量を算出するという制御を採用することができる。そして、この制御を採用した場合において、この制御に加えて、瞬時補正値に「1」よりも小さい係数を乗算することによって算出される値(以下この値を「学習加算値」という)を積算することによって瞬時補正値の学習値(以下この学習値を「学習補正値」という)を算出し、上記制御パラメータ値を上記偏差に基づいて算出される瞬時補正値と既に算出されている学習補正値とによって補正し、この補正された制御パラメータ値を用いてEGR制御弁に与えられる操作量を算出するという制御(以下この制御を「学習制御」という)を採用することができる。
ここで、学習補正値を算出するために瞬時補正値に乗算される係数(以下この係数を「学習係数」という)が一定の値に固定されている場合において、過剰に大きな瞬時補正値(すなわち、EGRガス量を目標EGRガス量に安定した挙動で収束させることができる適切な瞬時補正値から大きくかけ離れた瞬時補正値)が算出されると、過剰に大きな学習加算値(すなわち、EGRガス量を目標EGRガス量に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値を算出させてしまう学習加算値)が算出される可能性がある。ここで、過剰に大きな学習加算値が算出され、この学習加算値を用いて新たな学習補正値が算出されると(すなわち、学習補正値が更新されると)、過剰に大きな学習補正値(すなわち、EGRガス量を目標EGRガス量に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値)が算出されることになる。そして、この過剰に大きな学習補正値と次に算出される瞬時補正値とによって制御パラメータ値が補正され、この補正された制御パラメータ値がEGR制御弁に与えられる操作量の算出に用いられると、EGRガス量が不安定な挙動を示しながら変化することになる。つまり、EGRガス量の制御が不安定になる。
さらに、上記学習補正値にはEGR制御弁の動作に関する定常的な誤差(以下この誤差を「EGR制御弁定常誤差」という)に起因する目標EGRガス量に対するEGRガス量の偏差(以下、目標EGR量に対するEGRガス量の偏差を「EGRガス量偏差」という)を解消する働きがある。すなわち、EGR制御弁に与えられるべき操作量を算出するために、制御対象に操作量が与えられたときのEGRガス量と操作量との関係が予め求められる。そして、この求められた関係と目標EGRガス量とからEGR制御弁に与えられるべき操作量が算出され、この算出された操作量がEGR制御弁に与えられる。ここで、与えられた操作量に対するEGR制御弁の動作特性が上記関係を求めるときに用いられたEGR制御弁の動作特性(以下この動作特性を「所期の動作特性」という)と同じであり且つEGR制御弁を取り巻く環境が上記関係を求めるときに想定されている環境(以下この環境を「所期の周囲環境」という)と同じであれば、上記関係を用いて算出された操作量がEGR制御弁に与えられることによってEGRガス量が目標EGRガス量に一致するはずである。しかしながら、実際には、EGR制御弁の動作特性は個々のEGR制御弁によって異なることから、EGR制御弁の動作特性が所期の動作特性とは異なることがある。この場合、上記関係を用いて算出された操作量がEGR制御弁に与えられたとしてもEGRガス量は目標EGRガス量に一致しない。また、当然のことながら、EGR制御弁を取り巻く環境が所期の周囲環境とは異なることもある。この場合にも、上記関係を用いて算出された操作量がEGR制御弁に与えられたとしてもEGRガス量は目標EGRガス量に一致しない。そして、こうした場合、EGR制御弁にEGR制御弁定常誤差が生じていると言える。上記学習補正値はこうしたEGR制御弁定常誤差を解消する働きがあるのである。
そして、学習加算値にはEGR制御弁定常誤差に起因するEGRガス量誤差が反映されることから、学習補正値の算出回数が多くなれば、すなわち、学習補正値の学習が進めば学習補正値はEGR制御弁定常誤差を完全に解消することができる値(以下この値を「習熟値」という)に近づく。したがって、目標EGRガス量に対するEGRガス量の追従性を高くするためには、学習補正値を可能な限り早く習熟値に到達させることが好ましい。
ここで、瞬時補正値が過剰に大きな値ではなく、瞬時補正値から比較的大きな学習加算値が算出され、この学習加算値によって学習補正値が更新され、この学習補正値と次に算出される瞬時補正値とによって制御パラメータ値が補正され、この補正された制御パラメータ値に基づいてEGR制御弁に与えられる操作量が算出され、この操作量がEGR制御弁に与えられたとしてもEGRガス量の挙動が不安定にならない場合において、学習係数が比較的小さい一定の値に固定されていると、瞬時補正値から算出される学習加算値が過剰に小さい値(すなわち、EGRガス量の挙動が不安定にならない範囲で最も大きな学習加算値に比べて過剰に小さい値)となる。この場合、学習補正値を早く習熟値に到達させることができない。一方、学習係数が比較的大きい一定の値に固定されていると、瞬時補正値が過剰に大きな値である場合、瞬時補正値から算出される学習加算値が過剰に大きい値となる。この場合、過剰に大きな学習補正値が算出されるのだから、結局のところ、学習補正値を早く習熟値に到達させることができない。
このように、上述した学習制御が行われる限り、EGRガス量の制御が不安定になったり、学習補正値の学習速度が遅くなったりする。
そして、このことは、一般的に、制御対象(上の例では、EGR制御弁)によって制御量(上の例では、EGRガス量)を目標制御量(上の例では、目標EGRガス量)に制御するために上述したような学習制御を利用している場合にも等しく当てはまる。
本発明の目的は制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することにある。
本願の1つの発明は、制御対象の制御量の目標値である目標制御量を算出し、該算出された目標制御量に制御量を一致させるために目標とすべき制御対象の動作状態である目標動作状態を設定するために用いられるパラメータの値である制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて設定される目標動作状態に従って制御対象の動作状態を制御する内燃機関の制御装置に関する。
そして、本発明の制御装置は、制御量が目標制御量に一致するように制御対象の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための瞬時補正値を目標制御量に対する制御量の偏差に基づいて算出する制御と、瞬時補正値を補正するための係数である学習係数によって瞬時補正値を補正することによって得られる値である学習加算値を積算することによって学習補正値を算出する制御と、を実行し、新たに算出される瞬時補正値と既に算出されている学習補正値とに基づいて制御パラメータ補正値を算出する。
ここで、本発明の制御装置では、目標制御量に対する制御量の追従の形態として許容される追従の形態が許容追従形態として予め定められており、目標制御量に対する制御量の追従の形態が前記許容追従形態となる制御パラメータ補正値の範囲が許容制御パラメータ補正値範囲として予め定められておる。
そして、上記目的を達成するために、本発明の制御装置は、制御パラメータ補正値が前記許容制御パラメータ補正値範囲内に収まるように前記学習係数を設定する。
本発明によれば、制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができる。すなわち、制御対象によって制御量を目標制御量に制御するための手段として、一般的には、以下の手段が採用される。すなわち、制御量を目標制御量に制御するために制御対象に与えられるべき操作量を目標制御量に基づいて算出するために、目標制御量と操作量との間の関係が予め求められ、内燃機関の運転中、この関係を用いて目標制御量に基づいて操作量が算出され、この操作量が制御対象に与えられる。ここで、上記関係が求められたときに用いられた制御対象の動作特性を「所期の動作特性」と称し、上記関係が求められたときの制御対象を取り巻く環境を「所期の周囲環境」と称したとき、制御対象の動作特性が所期の動作特性と同じであり且つ制御対象を取り巻く環境が所期の周囲環境と同じであれば、上記関係を用いて目標制御量に基づいて算出された操作量が制御対象に与えられることによって制御量が目標制御量に一致するはずである。しかしながら、実際には、制御対象の動作特性は個々の制御対象によって異なることから、制御対象の動作特性が所期の動作特性からずれていることがある。この場合、上記関係を用いて算出された操作量が制御対象に与えられたとしても制御量は目標制御量に一致しない。また、制御対象が長期間使用されることによって当該制御対象が劣化し、その動作特性が所期の動作特性からずれることがある。この場合にも、上記関係を用いて算出された操作量が制御対象に与えられたとしても制御量は目標制御量に一致しない。もちろん、制御対象を取り巻く環境が所期の周囲環境とは異なることもある。この場合にも、上記関係を用いて算出された操作量が制御対象に与えられたとしても制御量は目標制御量に一致しない。こうした状況下では、所期の動作特性に対する制御対象の動作特性の定常的な誤差(以下この誤差を「定常動作特性誤差」という)が生じていると言える。
そして、目標制御量に対する制御量の誤差(以下この誤差を「制御量誤差」という)には上記定常動作特性誤差に起因する制御量誤差(以下この制御量誤差を「定常制御量誤差」という)が含まれており、内燃機関の運転状態が定常状態にあるときには制御量誤差のほとんどが定常制御量誤差であると言える。
ところで、瞬時補正値は制御量誤差に基づいて算出され、学習加算値はこの瞬時補正値に基づいて算出され、学習補正値はこの学習加算値に基づいて算出される(すなわち、学習補正値はこの学習加算値に基づいて更新される)。したがって、学習補正値には定常制御量誤差を解消する働きがある。そして、学習補正値の算出回数が多くなれば、すなわち、学習補正値の学習が進めば、学習補正値は定常制御量誤差を完全に解消することができる値(以下この値を「習熟値」という)に徐々に近づく。したがって、制御量を目標制御量に早く収束させるという観点では、学習補正値を習熟値に早く到達させることが好ましい。すなわち、学習補正値の学習速度を向上させることが好ましい。
ここで、学習補正値の学習速度を向上させる手段として、学習係数を比較的大きい値に設定するという手段が考えられる。しかしながら、これには以下のような不都合がある。すなわち、学習係数が比較的大きい一定の値に固定されている場合、過剰に大きな瞬時補正値(すなわち、制御量を目標制御量に安定した挙動で収束させることができる適切な瞬時補正値から大きくかけ離れた瞬時補正値)が算出されると、過剰に大きな学習加算値(すなわち、制御量を目標制御量に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値を算出させてしまう学習加算値)が算出される可能性がある。ここで、過剰に大きな学習加算値が算出され、この学習加算値を用いて新たな学習補正値が算出される(すなわち、学習補正値が更新される)と、過剰に大きな学習補正値(すなわち、制御量を目標制御量に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値)が算出されることになる。そして、この過剰に大きな学習補正値が制御パラメータ補正値の算出に用いられ、この制御パラメータ補正値によって制御パラメータ値が補正され、この補正された制御パラメータ値が制御対象の動作状態の制御に用いられると、制御量が不安定な挙動を示しながら変化することになる。つまり、制御量の制御が不安定になる。しかしながら、制御量の制御が不安定であることは好ましくない。しかも、制御量の制御が不安定な状態で学習補正値の学習が進行したとしても結果的には学習補正値を早く習熟値に到達させることはできない(すなわち、学習補正値の学習速度は向上されない)。しかしながら、学習係数を比較的小さい一定の値に固定すれば制御量の制御は安定するが学習補正値を早く習熟値に到達させることはできない。
つまり、制御量を好ましい形態で制御するためには制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできないのである。こうした状況下において、本願の発明者は学習係数を可変に設定するという思想に至り、そして、状況に応じて如何なる値に学習係数を設定すれば制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるかについて研究を重ねた結果、本発明を発明するに至ったのである。
すなわち、本発明では、制御パラメータ補正値が許容制御パラメータ補正値範囲(すなわち、制御パラメータ補正値によって補正された制御パラメータ値が制御対象の動作状態に用いられた場合に制御量を目標制御量に安定した挙動で収束させることができる制御パラメータ補正値の範囲)内の値になるように学習係数が設定される。このため、過剰に大きな瞬時補正値が算出されたとしても過剰に大きな学習加算値が算出されることがなく、その結果、過剰に大きな学習補正値が算出されることもない。したがって、本発明によれば、過剰に大きな瞬時補正値が算出され、この瞬時補正値に基づいて学習加算値が算出され、この学習加算値に基づいて学習補正値が算出され、この学習補正値を用いて制御パラメータ補正値が算出され、この制御パラメータ補正値によって補正された制御パラメータ値が制御対象の動作状態の制御に用いられたとしても、制御量の制御は安定しており、制御量の制御が安定した状態で学習補正値の学習が進行することから、結果的には、学習補正値を早く習熟値に到達させることができる(すなわち、学習補正値の学習速度が向上される)。
一方、瞬時補正値が過剰に大きな値ではない場合、学習係数が大きな値に設定され、この学習係数を用いて瞬時補正値に基づいて学習加算値が算出され、この学習加算値に基づいて学習補正値が算出され、この学習補正値に基づいて制御パラメータ補正値が算出されたとしても、この制御パラメータ補正値は許容制御パラメータ補正値範囲内の値になる。つまり、本発明では、瞬時補正値が過剰に大きな値ではない場合、学習係数が大きな値に設定される。したがって、本発明によれば、制御量の制御を安定させた状態で、学習補正値を早く習熟値に到達させることができる(すなわち、学習補正値の学習速度が向上される)。
こうした理由から、本発明によれば、制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるのである。
また、本願の別の発明は、制御対象の制御量の目標値である目標制御量を算出し、該算出された目標制御量に制御量を一致させるために目標とすべき制御対象の動作状態である目標動作状態を設定するために用いられるパラメータの値である制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて設定される目標動作状態に従って制御対象の動作状態を制御する内燃機関の制御装置に関する。
そして、本発明の制御装置は、制御量が目標制御量に一致するように制御対象の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための瞬時補正値を目標制御量に対する制御量の偏差に基づいて算出する制御と、瞬時補正値を補正するための係数である学習係数によって瞬時補正値を補正することによって得られる値である学習加算値を積算することによって学習補正値を算出する制御と、を実行し、新たに算出される瞬時補正値と既に算出されている学習補正値とに基づいて制御パラメータ補正値を算出する。
そして、上記目的を達成するために、本発明の制御装置は、既に算出されている学習補正値が大きいほど大きい学習係数を設定する。
本発明によれば、制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができる。すなわち、上述したように、所期の動作特性に対する制御対象の動作特性の定常的な誤差(以下この誤差を「定常動作特性誤差」という)が生じていることがある。
そして、制御量誤差(すなわち、目標制御量に対する制御量の誤差)には定常制御量誤差(すなわち、上記定常動作特性誤差に起因する制御量誤差)が含まれており、内燃機関の運転状態が定常状態にあるときには制御量誤差のほとんどが定常制御量誤差であると言える。
ところで、上述したように、学習補正値には定常制御量誤差を解消する働きがある。そして、制御量を目標制御量に早く収束させるという観点では、学習補正値を習熟値に早く到達させることが好ましい。すなわち、学習補正値の学習速度を向上させることが好ましい。
ここで、上述したように、学習補正値の学習速度を向上させる手段として、学習係数を比較的大きい値に設定するという手段を採用した場合、制御量の制御が不安定になる。しかしながら、制御量の制御が不安定になることは好ましくない。しかも、制御量の制御が不安定な状態で学習補正値の学習が進行したとしても結果的には学習補正値を早く習熟値に到達させることはできない(すなわち、学習補正値の学習速度は向上されない)。しかしながら、学習係数を比較的小さい一定の値に固定すれば制御量の制御は安定するが学習補正値を早く習熟値に到達させることはできない。
つまり、制御量を好ましい形態で制御するためには制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできないのである。こうした状況下において、本願の発明者は学習係数を可変に設定するという思想に至り、そして、状況に応じて如何なる値に学習係数を設定すれば制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるかについて研究を重ねた結果、本発明を発明するに至ったのである。
すなわち、本発明では、学習補正値が大きいほど学習係数は大きな値に設定される。ここで、学習補正値が大きいことは学習補正値が習熟値に近いことを意味し、学習補正値が習熟値に近ければ過剰な瞬時補正値が算出される可能性が低い。したがって、学習補正値が大きいときに学習係数が大きな値に設定されたとしても、過剰な学習加算値が算出される可能性が低い。したがって、このとき算出される学習加算値によって更新された学習補正値が制御パラメータ補正値の算出に用いられ、この制御パラメータ補正値によって補正された制御パラメータ値が制御対象の動作状態の制御に用いられたとしても、制御量の制御が不安定になることが十分に抑制され、その一方で、学習係数が大きいのであるから、学習補正値の学習速度が十分に向上される。
逆に、本発明では、学習補正値が小さいほど学習係数は小さい値に設定される。ここで、学習補正値が小さいことは学習補正値が習熟値から遠いことを意味し、学習補正値が習熟値から遠ければ過剰な瞬時補正値が算出される可能性が高い。したがって、学習係数が大きいと過剰な学習加算値が算出される可能性が高い。上述したように、過剰な学習加算値によって更新された学習補正値が制御パラメータ補正値の算出に用いられ、その制御パラメータ補正値によって補正された制御パラメータ値が制御対象の動作状態の制御に用いられると、制御量の制御が不安定になる。しかしながら、本発明では、学習係数は学習補正値が小さいほど小さい値に設定されるのだから、過剰な瞬時補正値が算出されたとしても過剰な学習加算値が算出される可能性は低い。したがって、本発明によれば、この場合にも、制御量の制御が不安定になることが十分に抑制され、その一方で、学習係数が学習補正値に応じた値に設定されるのであるから、学習補正値の学習速度が適正な形で向上される。
こうした理由から、本発明によれば、制御量の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるのである。
なお、上記発明の制御装置が、燃焼室に形成される混合気の空燃比を制御する空燃比制御手段を具備し、前記制御対象が前記空燃比制御手段であり、前記制御量が燃焼室に形成される混合気の空燃比であり、同空燃比の推定値である推定空燃比が目標制御量であり、前記制御パラメータ値が前記空燃比制御手段の目標動作状態の設定に用いられるパラメータの値であり、前記制御パラメータ補正値が混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための補正値であり、前記瞬時補正値が混合気の空燃比が推定空燃比に一致するように前記空燃比制御手段の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための補正値である場合、上記発明によれば、推定空燃比が算出され、混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための制御パラメータ補正値が算出され、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて前記空燃比制御手段の目標動作状態が設定される。
また、上記発明の制御装置が、燃焼室から排気通路に排出された排気ガスを吸気通路に導入する排気再循環装置を具備し、該排気再循環装置が吸気通路に導入される排気ガスの量を制御する排気ガス再循環量制御手段を有し、前記制御パラメータ値が前記排気ガス再循環量制御手段の目標動作状態の設定に用いられるパラメータの値であり、前記瞬時補正値が混合気の空燃比が推定空燃比に一致するように前記排気ガス再循環量制御手段の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための補正値である場合、上記発明によれば、推定空燃比が算出され、混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための制御パラメータ補正値が算出され、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて前記排気ガス再循環量制御手段の目標動作状態が設定される。
また、上記発明の制御装置が、前記排気再循環装置によって吸気通路に導入される排気ガスの量である排気ガス再循環量の目標値である目標排気ガス再循環量を設定し、排気ガス再循環量が目標排気ガス再循環量に一致するように前記排気ガス再循環量制御手段の目標動作状態を設定する場合、上記発明によれば、内燃機関の運転に関する所定のパラメータの値である機関運転パラメータ値に応じて目標とすべき排気ガス再循環量が基準排気ガス再循環量として予め求められており、前記制御パラメータ値が機関運転パラメータ値であり、機関運転パラメータ値が前記制御パラメータ補正値によって補正され、該補正された機関運転パラメータ値に基づいて基準排気ガス再循環量が算出され、該算出された基準排気ガス再循環量が目標排気ガス再循環量に設定される。
ここで、上記発明の制御装置が、燃焼室に燃料を供給する燃料供給手段をさらに具備し、該燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量の目標値である目標燃料供給量を設定し、該目標燃料供給量の燃料が燃焼室に供給されるように前記燃料供給手段の動作状態を制御する場合、上記発明によれば、前記機関運転パラメータ値が目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量であり、該目標燃料供給量相当量が前記制御パラメータ補正値によって補正され、該補正された目標燃料供給量相当量に基づいて基準排気ガス再循環量が算出され、該算出された基準排気ガス再循環量が目標排気ガス再循環量に設定される。
また、上記発明の制御装置が、前記排気再循環装置によって吸気通路に導入される排気ガスの量である排気ガス再循環量の目標値である目標排気ガス再循環量を設定し、排気ガス再循環量が目標排気ガス再循環量に一致するように前記排気ガス再循環量制御手段の動作状態を制御する場合、上記発明によれば、内燃機関の運転に関する所定のパラメータの値である機関運転パラメータ値に応じて目標とすべき排気ガス再循環量が基準排気ガス再循環量として予め求められており、前記制御パラメータ値が基準排気ガス再循環量であり、機関運転パラメータ値に基づいて基準排気ガス再循環量が算出され、該算出された基準排気ガス再循環量が前記制御パラメータ補正値によって補正され、該補正された基準排気ガス再循環量が目標排気ガス再循環量に設定される。
ここで、上記発明の制御装置が、燃焼室に燃料を供給する燃料供給手段をさらに具備し、該燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量の目標値である目標燃料供給量を設定し、該目標燃料供給量の燃料が燃焼室に供給されるように前記燃料供給手段の動作状態を制御する場合、上記発明によれば、前記機関運転パラメータ値が目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量であり、該目標燃料供給量相当量に基づいて基準排気ガス再循環量が算出され、該算出された基準排気ガス再循環量が前記制御パラメータ補正値によって補正され、該補正された基準排気ガス再循環量が目標排気ガス再循環量に設定される。
また、上記発明の制御装置が、燃焼室に供給される空気の量である供給空気量を検出する供給空気量検出手段をさらに具備する場合、上記発明によれば、目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量が前記制御パラメータ補正値によって補正され、該補正された目標燃料供給量相当量と前記供給空気量検出手段によって検出される供給空気量とに基づいて推定空燃比が算出される。
本発明の内燃機関の制御装置の1つの実施形態(以下「第1実施形態」という)について説明する。なお、以下の説明において「機関運転」とは「内燃機関の運転」を意味し、「機関回転数」とは「内燃機関の回転数」を意味する。
第1実施形態の制御装置が適用される内燃機関が図1に示されている。図1に示されている内燃機関は圧縮自着火式の内燃機関(いわゆるディーゼルエンジン)である。図1において、10は内燃機関、20は内燃機関10の本体、21は燃料噴射弁、22は燃料ポンプ、23は燃料供給通路、30は吸気通路、31は吸気マニホルド、32は吸気管、33はスロットル弁、34はインタークーラ、35はエアフローメータ、36はエアクリーナ、37は吸気圧センサ、40は排気通路、41は排気マニホルド、42は排気管、43は空燃比センサ、50は排気再循環装置(以下この装置を「EGR装置」という)、70はアクセルペダル、71はアクセルペダル踏込量センサ、72はクランクポジションセンサ、80は電子制御装置をそれぞれ示している。吸気通路30は吸気マニホルド31と吸気管32とから構成されている。排気通路40は排気マニホルド41と排気管42とから構成されている。
電子制御装置80はマイクロコンピュータからなる。また、電子制御装置80はCPU(マイクロプロセッサ)81、ROM(リードオンリメモリ)82、RAM(ランダムアクセスメモリ)83、バックアップRAM84、および、インターフェース85を有する。これらCPU81、ROM82、RAM83、バックアップRAM84、および、インターフェース85は双方向バスによって互いに接続されている。
燃料噴射弁21は内燃機関の本体20に取り付けられている。燃料噴射弁21には燃料供給通路23を介して燃料ポンプ22が接続されている。燃料ポンプ22は燃料噴射弁21に燃料供給通路23を介して高圧の燃料を供給する。また、燃料噴射弁21は電子制御装置80のインターフェース85に電気的に接続されている。電子制御装置80は燃料噴射弁21に燃料を噴射させるための指令信号を燃料噴射弁21に供給する。また、燃料ポンプ22も電子制御装置80のインターフェース85に電気的に接続されている。電子制御装置80は燃料ポンプ22から燃料噴射弁21に供給される燃料の圧力が予め定められた圧力に維持されるように燃料ポンプ22の作動を制御する制御信号を燃料ポンプ22に供給する。なお、燃料噴射弁21はその燃料噴射孔が燃焼室内に露出するように内燃機関の本体20に取り付けられている。したがって、電子制御装置80から燃料噴射弁21に指令信号が供給されると燃料噴射弁21は燃焼室内に燃料を直接噴射する。
吸気マニホルド31はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている吸気ポート(図示せず)に接続されている。また、吸気マニホルド31はその他端で吸気管32の一端に接続されている。
排気マニホルド41はその一端で複数の管に分岐しており、これら分岐した管はそれぞれ内燃機関の本体20の燃焼室にそれぞれ対応して形成されている排気ポート(図示せず)に接続されている。また、排気マニホルド41はその他端で排気管42の一端に接続されている。
スロットル弁33は吸気管32に配置されている。また、スロットル弁33の開度(以下この開度を「スロットル弁開度」という)が変更されるとスロットル弁33が配置された領域における吸気管32内の流路面積が変わる。これによってスロットル弁33を通過する空気の量が変わり、ひいては、燃焼室に吸入される空気の量が変わる。スロットル弁33にはその動作状態(すなわち、スロットル弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「スロットル弁アクチュエータ」という)が接続されている。スロットル弁アクチュエータは電子制御装置80のインターフェース85に電気的に接続されている。電子制御装置80はスロットル弁開度を目標スロットル弁開度に制御するようにスロットル弁アクチュエータを駆動するための制御信号をスロットル弁アクチュエータに供給する。
インタークーラ34はスロットル弁33よりも上流において吸気管32に配置されている。インタークーラ34はそこに流入する空気を冷却する。
エアフローメータ35はインタークーラ34よりも上流において吸気管32に配置されている。また、エアフローメータ35は電子制御装置80のインターフェース85に電気的に接続されている。エアフローメータ35はそこを通過する空気の量に対応する出力値を出力する。この出力値は電子制御装置80に入力される。電子制御装置80はこの出力値に基づいてエアフローメータ35を通過する空気の量、ひいては、燃焼室に吸入される空気の量を算出する。
吸気圧センサ37はスロットル弁33よりも下流の吸気通路30(より具体的には、吸気マニホルド31)に配置されている。また、吸気圧センサ37は電子制御装置80のインターフェース85に電気的に接続されている。吸気圧センサ37はその周辺の気体の圧力(つまり、吸気マニホルド31内の気体の圧力であって、燃焼室に吸入される気体の圧力)に対応する出力値を出力する。電子制御装置80はこの出力値に基づいて吸気圧センサ37周りの気体の圧力、すなわち、燃焼室に吸入される気体の圧力(以下この圧力を「吸気圧」という)を算出する。
空燃比センサ43は排気通路40(より具体的には、吸気管42)に配置されている。また、空燃比センサ43は電子制御装置80のインターフェース85に電気的に接続されている。空燃比センサ43はそこに到来する排気ガス中の酸素濃度に対応する出力値を出力する。電子制御装置80はこの出力値に基づいて燃焼室に形成される混合気の空燃比を算出する。
アクセルペダル踏込量センサ71は電子制御装置80のインターフェース85に電気的に接続されている。アクセルペダル踏込量センサ71はアクセルペダル70の踏込量に対応する出力値を出力する。この出力値は電子制御装置80に入力される。電子制御装置80はこの出力値に基づいてアクセルペダル70の踏込量、ひいては、内燃機関に要求されているトルクを算出する。
クランクポジションセンサ72は内燃機関のクランクシャフト(図示せず)近傍に配置されている。また、クランクポジションセンサ72は電子制御装置80のインターフェース85に電気的に接続されている。クランクポジションセンサ72はクランクシャフトの回転位相に対応する出力値を出力する。この出力値は電子制御装置80に入力される。電子制御装置80はこの出力値に基づいて機関回転数を算出する。
EGR装置50は排気再循環通路(以下この通路を「EGR通路」という)51と、排気再循環制御弁(以下この制御弁を「EGR制御弁」という)52と、排気再循環クーラ(以下このクーラを「EGRクーラ」という)53とを有する。EGR装置50は燃焼室から排気通路40に排出された排気ガスをEGR通路51を介して吸気通路30に導入する装置である。EGR通路51はその一端で排気通路40(より具体的には、排気マニホルド41)に接続されているとともにその他端で吸気通路30(より具体的には、吸気マニホルド31)に接続されている。すなわち、EGR通路51は排気通路40を吸気通路30に連結している。EGR制御弁52はEGR通路51に配置されている。EGR制御弁52の開度(以下この開度を「EGR制御弁開度」という)が変更されるとEGR制御弁52を通過する排気ガスの量が変わり、ひいては、吸気通路30に導入される排気ガスの量が変わる。EGR制御弁52はその動作状態(すなわち、EGR制御弁開度)を変更するためのアクチュエータ(以下このアクチュエータを「EGR制御弁アクチュエータ」という)を内蔵している。EGR制御弁アクチュエータは電子制御装置80に電気的に接続されている。電子制御装置80はEGR制御弁開度を目標EGR制御弁開度に制御するようにEGR制御弁アクチュエータを駆動するための制御信号をEGR制御弁アクチュエータに供給する。
次に、第1実施形態の燃料噴射弁の制御について説明する。なお、以下の説明において「燃料噴射量」とは「燃料噴射弁から噴射される燃料の量」を意味する。第1実施形態では、アクセルペダルの踏込量に応じて最適な燃料噴射量が実験等によって予め求められる。そして、これら求められた燃料噴射量が図2(A)に示されているようにアクセルペダルの踏込量Dacの関数のマップの形で基準燃料噴射量Qbとして電子制御装置に記憶されている。そして、機関運転中、その時々のアクセルペダルの踏込量Dacに対応する基準燃料噴射量Qbが図2(A)のマップから取得され、この取得された基準燃料噴射量Qbが目標燃料噴射量に設定される。そして、斯くして設定された目標燃料噴射量の燃料が燃料噴射弁から噴射されるように電子制御装置から燃料噴射弁に指令信号が供給される。なお、図2(A)に示されているように、基準燃料噴射量Qbはアクセルペダルの踏込量Dacが大きくなるほど多くなる。
次に、第1実施形態のスロットル弁の制御について説明する。第1実施形態では、図1に示されている内燃機関の運転状態を定常運転状態(すなわち、燃料噴射量と機関回転数とが一定に維持された状態)に維持するとともに内燃機関を取り巻く環境に関するパラメータであって機関運転状態に影響を及ぼすパラメータ(たとえば、大気圧、大気温度、内燃機関の温度などであって、以下このパラメータを「環境パラメータ」という)の値が特定の値にあるという条件のもと、燃料噴射量と機関回転数とに応じた適切なスロットル弁開度が実験等によって予め求められる。そして、これら求められたスロットル弁開度が図2(B)に示されているように燃料噴射量Qと機関回転数Nとの関数のマップの形で基準スロットル弁開度Dthbとして電子制御装置に記憶されている。なお、図2(B)のマップでは、燃料噴射量Qが多いほど基準スロットル弁開度Dthbが大きくなり、機関回転数Nが大きいほど基準スロットル弁開度Dthbが大きくなっている。
そして、機関運転中、その時々の燃料噴射量Qと機関回転数Nとに対応する基準スロットル弁開度Dthbが図2(B)のマップから取得され、この取得された基準スロットル弁開度Dthbが目標スロットル弁開度に設定される。そして、スロットル弁開度が斯くして設定された目標スロットル弁開度TDthとなるようにスロットル弁を駆動するようにスロットル弁アクチュエータを駆動させる制御信号が電子制御装置から供給される。なお、図2(B)に示されているマップでは、燃料噴射量Qが大きいほど基準スロットル弁開度Dthbが大きく、機関回転数Nが大きいほど基準スロットル弁開度TDthbが大きい。
次に、第1実施形態のEGR制御弁の制御について説明する。第1実施形態では、機関運転中、EGR率(すなわち、燃焼室に吸入される全ての気体の質量に占める排気ガスの質量の割合)の目標値が目標EGR率として設定される(この目標EGR率の設定方法については後述する)。そして、実際のEGR率(このEGR率の算出方法については後述する)が上記設定された目標EGR率に一致するようにEGR制御弁開度が制御されるように電子制御装置によってEGR制御弁アクチュエータがフィードバック制御される。より具体的には、実際のEGR率が目標EGR率よりも低ければEGR制御弁開度が大きくなるようにEGR制御弁を駆動するようにEGR制御弁アクチュエータを駆動させる制御信号が電子制御装置からEGR制御弁アクチュエータに供給される。一方、実際のEGR率が目標EGR率よりも高ければEGR制御弁開度が小さくなるようにEGR制御弁を駆動するようにEGR制御弁アクチュエータを駆動させる制御信号が電子制御装置からEGR制御弁アクチュエータに供給される。
次に、第1実施形態の実際のEGR率の算出方法について説明する。第1実施形態では、次式1に従って実際のEGR率Regrが算出される。式1において「Gc」は「1回の吸気行程において燃焼室に吸入された気体の総量(つまり、空気とEGRガスとの混合気)」であり、「Ga」は「1回の吸気行程において燃焼室に供給された空気の量」である。なお、1つの吸気行程において燃焼室に吸入される気体の総量は、たとえば、機関回転数、吸気圧などのパラメータから算出可能であり、1回の吸気行程において燃焼室に吸入される空気の量は、たとえば、エアフローメータによって検出される空気の量から算出可能である。
Regr=(Gc-Ga)/Gc …(1)
次に、第1実施形態の目標EGR率の設定方法について説明する。第1実施形態では、図1に示されている内燃機関の運転状態を定常運転状態(すなわち、燃料噴射量と機関回転数とが一定に維持された状態)に維持するとともに内燃機関を取り巻く環境に関するパラメータであって機関運転状態に影響を及ぼすパラメータ(たとえば、大気圧、大気温度、内燃機関の温度などであって、以下このパラメータを「環境パラメータ」という)の値が特定の値にあるという条件のもと、燃料噴射量と機関回転数とに応じた適切なEGR率(すなわち、燃焼室に吸入される全ての気体の質量に占める排気ガスの質量の割合)が予め実験等によって求められる。そして、これら求められたEGR率が図2(C)に示されているように燃料噴射量Qと機関回転数Nとの関数のマップの形で基準EGR率Regrbとして電子制御装置に記憶されている。なお、図2(C)のマップでは、燃料噴射量Qが多いほど基準EGR率Regrbが小さくなり、機関回転数Nが大きいほど基準EGR率Regrbが小さくなっている。
そして、次式2に示されているように、機関運転中に設定される目標燃料噴射量に制御パラメータ補正値(この制御パラメータ補正値の詳細については後述する)を乗算して得られる燃料噴射量を図2(C)のマップからの基準EGR率Regrbの取得用の燃料噴射量Qとするとともにそのときの機関回転数を図2(C)のマップからの基準EGR率Regrbの取得用の機関回転数Nとして図2(C)のマップから基準EGR率Regrbが取得される。すなわち、機関運転中に設定される目標燃料噴射量を制御パラメータ補正値によって補正することによって得られる燃料噴射量が図2(C)のマップからの基準EGR率Regrbの取得に用いられる。そして、図2(C)のマップから取得された基準EGR率Regrbが目標EGR率に設定される。
Q=TQ×K …(2)
なお、式2において「Q」が「図2(C)のマップからの基準EGR率の取得に用いられる燃料供給量」であり、「TQ」が「目標燃料噴射量」であり、「K」が「制御パラメータ補正値」である。
次に、第1実施形態の制御パラメータ補正値について説明する。なお、以下の説明において「検出空燃比」とは「空燃比センサによって検出される混合気の空燃比」を意味し、「推定空燃比」とは「混合気の空燃比の推定値」を意味し、「吸入空気量」とは「エアフローメータによって検出される空気の量」を意味する。
第1実施形態では、次式3に示されているように、制御パラメータ補正値は瞬時補正値と学習補正値(これら瞬時補正値および学習補正値の詳細は後述する)と「1」とを合算することによって算出される。式3において「K」が「制御パラメータ補正値」であり、「KT」が「瞬時補正値」であり、「KG」が「学習補正値」である。
K=KT+KG+1 …(3)
次に、第1実施形態の瞬時補正値について説明する。第1実施形態では、次式4に示されているように、推定空燃比を検出空燃比によって除算した値(以下この値を「空燃比誤差比」という)が算出される。式4において「Raf」が「空燃比誤差比」であり、「AFe」が「推定空燃比」であり、「AFd」が「検出空燃比」である。また、推定空燃比は、次式5に示されているように、制御パラメータ補正値を目標燃料噴射量に乗算して得られる値によって吸入空気量を除算することによって得られる値である。式5において「AFe」が「推定空燃比」であり、「K」が「制御パラメータ補正値」であり、「TQ」が「目標燃料噴射量」であり、「Ga」が「吸入空気量」である。また、空燃比誤差比は推定空燃比に対する検出空燃比の偏差に相当する値に相当するものであると言える。
Raf=AFe/AFd …(4)
AFe=Ga/(TQ×K) …(5)
AFe=Ga/(TQ×K) …(5)
そして、空燃比誤差比が「1」ではないとき(つまり、検出空燃比が推定空燃比に一致していないとき)には、空燃比誤差比が「1」になるように基準EGR率の取得に用いられる燃料噴射量を算出するための目標燃料噴射量の補正に現在用いられている制御パラメータ補正値を補正することによって空燃比誤差比を「1」にすることができる制御パラメータ補正値に対する補正値が瞬時補正値として算出される。別の言い方をすれば、空燃比誤差比が「1」ではないときには、空燃比誤差比が「1」になるように基準EGR率の取得に用いられる燃料噴射量を算出するための目標燃料供給量の補正に現在用いられている制御パラメータ補正値によって目標燃料噴射量を補正することを前提にして現在の目標燃料噴射量を補正することによって空燃比誤差比を「1」にすることができる目標燃料噴射量に対する補正値が瞬時補正値として算出される。
次に、第1実施形態の学習補正値について説明する。第1実施形態では、次式6に示されているように、逐次算出される瞬時補正値に所定の係数(以下この係数を「学習係数」といい、その詳細は後述する)を乗算して得られる値(以下この値を「学習加算値」という)と、現在用いられている学習補正値とを合算することによって新たな学習補正値が算出される。式6において「KGn」が「新たに算出される学習補正値(すなわち、更新された学習補正値)」であり、「KT」が「瞬時補正値」であり、「KL」が「学習係数」であり、「KGp」が「現在用いられている学習補正値」である。
KGn=KT×KL+KGp …(6)
なお、斯くして算出される新たな学習補正値KGnは図3のマップに保存されている学習補正値KGのうち現在の目標燃料噴射量TQと現在の機関回転数Nとに対応する学習補正値KGとして保存される。こうした新たな学習補正値の算出とその保存とが学習補正値の更新に相当する。そして、機関運転中、上述したように空燃比誤差比に基づいて瞬時補正値が算出されるとともに、そのときの目標燃料噴射量TQおよび機関回転数Nに基づいて図3のマップから学習補正値KGが取得される。そして、斯くして取得された学習補正値KGと上述したように算出される瞬時補正値とを上式3に適用することによって制御パラメータ補正値Kが算出される。なお、図3のマップに保存されている学習補正値KGの初期値は「0」である。
次に、第1実施形態の学習係数について説明する。第1実施形態では、現在用いられている学習補正値が大きいほど学習係数が大きい値に設定される。なお、第1実施形態では、学習係数は「0」以上の値であって且つ「1」以下の値である。
次に、第1実施形態から得られる利点について説明する。燃料噴射弁から目標燃料噴射量の燃料を噴射させるために燃料噴射弁に与えられるべき指令信号(別の言い方をすれば、燃料噴射弁に与えられるべき操作量)を目標燃料噴射量に基づいて算出するために、目標燃料噴射量と指令信号との間の関係(たとえば、目標燃料噴射量を指令信号に変換する変換則)が予め求められ、機関運転中、この関係を用いて目標燃料噴射量に基づいて指令信号が算出され、この指令信号が燃料噴射弁に与えられる。ここで、上記関係が求められたときに用いられた燃料噴射弁の動作特性を「所期の動作特性」と称し、上記関係が求められたときの燃料噴射弁を取り巻く環境を「所期の周囲環境」と称したとき、燃料噴射弁の動作特性が所期の動作特性と同じであり且つ燃料噴射弁を取り巻く環境が所期の周囲環境と同じであれば、上記関係を用いて目標燃料噴射量に基づいて算出された指令信号が燃料噴射弁に与えられることによって燃料噴射量が目標燃料噴射量に一致するはずである。しかしながら、実際には、燃料噴射弁の動作特性は個々の燃料噴射弁によって異なることから、燃料噴射弁の動作特性が所期の動作特性からずれていることがある。この場合、上記関係を用いて算出された指令信号が燃料噴射弁に与えられたとしても燃料噴射量は目標燃料噴射量に一致しない。また、燃料噴射弁が長期間使用されることによって当該燃料噴射弁が劣化し、その動作特性が所期の動作特性からずれることがある。この場合にも、上記関係を用いて算出された指令信号が燃料噴射弁に与えられたとしても燃料噴射量は目標燃料噴射量に一致しない。もちろん、燃料噴射弁を取り巻く環境が所期の周囲環境とは異なることもある。この場合にも、上記関係を用いて算出された指令信号が燃料噴射弁に与えられたとしても燃料噴射量は目標燃料噴射量に一致しない。こうした状況下では、所期の動作特性に対する燃料噴射弁の動作特性の定常的な誤差(以下この誤差を「燃料噴射弁の定常動作特性誤差」という)が生じていると言える。
また、エアフローメータの出力値に基づいて吸入空気量を算出するために、エアフローメータの出力値と吸入空気量との間の関係(たとえば、エアフローメータの出力値を吸入空気量に変換する変換則)が予め求められ、機関運転中、この関係を用いてエアフローメータの出力値に基づいて吸入空気量が算出される。ここで、上記関係が求められたときに用いられたエアフローメータの動作特性を「所期の動作特性」と称し、上記関係が求められたときのエアフローメータを取り巻く環境を「所期の周囲環境」と称したとき、エアフローメータの動作特性が所期の動作特性と同じであり且つエアフローメータを取り巻く環境が所期の周囲環境と同じであれば、上記関係を用いて算出された吸入空気量は実際の吸入空気量に一致するはずである。しかしながら、実際には、エアフローメータの動作特性は個々のエアフローメータによって異なることから、エアフローメータの動作特性が所期の動作特性からずれていることがある。この場合、上記関係を用いて算出された吸入空気量が実際の吸入空気量に一致しない。また、エアフローメータが長期間使用されることによって当該エアフローメータが劣化し、その動作特性が所期の動作特性からずれることがある。この場合にも、上記関係を用いて算出された吸入空気量は実際の吸入空気量に一致しない。もちろん、エアフローメータを取り巻く環境が所期の周囲環境とは異なることもある。この場合にも、上記関係を用いて算出された吸入空気量は実際の吸入空気量に一致しない。こうした状況下では、所期の動作特性に対するエアフローメータの動作特性の定常的な誤差(以下この誤差を「エアフローメータの定常動作特性誤差」という)が生じていると言える。
そして、推定空燃比に対する検出空燃比(すなわち、混合気の空燃比)の誤差(以下この誤差を「空燃比誤差」という)には上記燃料噴射弁の定常動作特性誤差と上記エアフローメータの定常動作特性誤差とに起因する空燃比誤差(以下この誤差を「定常空燃比誤差」という)が含まれており、機関運転状態が定常状態にあるときには空燃比誤差のほとんどが定常空燃比誤差であると言える。
ところで、瞬時補正値は空燃比誤差に基づいて逐次算出され、新たに算出される学習補正値にはこの瞬時補正値が反映される。したがって、学習補正値には定常空燃比誤差を解消する働きがある。そして、学習補正値の算出回数が多くなれば、すなわち、学習補正値の学習が進めば、学習補正値は定常空燃比誤差を完全に解消することができる値(以下この値を「習熟値」という)に徐々に近づく。したがって、混合気の空燃比を目標空燃比に早く収束させるという観点では、学習補正値を習熟値に早く到達させることが好ましい。すなわち、学習補正値の学習速度を向上させることが好ましい。
ここで、学習補正値の学習速度を向上させる手段として、学習係数を比較的大きい値に設定するという手段が考えられる。しかしながら、これには以下のような不都合がある。すなわち、学習係数が比較的大きい一定の値に固定されている場合、過剰に大きな瞬時補正値(すなわち、混合気の空燃比を推定空燃比に安定した挙動で収束させることができる適切な瞬時補正値から大きくかけ離れた瞬時補正値)が算出されると、過剰に大きな学習加算値(すなわち、混合気の空燃比を推定空燃比に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値を算出させてしまう学習加算値)が算出される可能性がある。ここで、過剰に大きな学習加算値が算出され、この学習加算値を用いて新たな学習補正値が算出される(すなわち、学習補正値が更新される)と、過剰に大きな学習補正値(すなわち、混合気の空燃比を推定空燃比に安定した挙動で収束させることができる適切な学習補正値から大きくかけ離れた学習補正値)が算出されることになる。そして、この過剰に大きな学習補正値が制御パラメータ補正値の算出に用いられ、この制御パラメータ補正値によって目標燃料噴射量が補正され、この補正された目標燃料噴射量を用いて基準EGR率が取得され、この基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態の制御に用いられると、混合気の空燃比が不安定な挙動を示しながら変化することになる。つまり、混合気の空燃比の制御が不安定になる。しかしながら、混合気の空燃比の制御が不安定であることは好ましくない。しかも、混合気の空燃比の制御が不安定な状態で学習補正値の学習が進行したとしても結果的には学習補正値を早く習熟値に到達させることはできない(すなわち、学習補正値の学習速度は向上されない)。しかしながら、学習係数を比較的小さい一定の値に固定すれば混合気の空燃比の制御は安定するが学習補正値を早く習熟値に到達させることはできない。
つまり、混合気の空燃比を好ましい形態で制御するためには混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできないのである。
しかしながら、第1実施形態では、現在用いられている学習補正値が大きいほど学習係数が大きな値に設定される。ここで、学習補正値が大きいことは学習補正値が習熟値に近いことを意味し、学習補正値が習熟値に近ければ過剰な瞬時補正値が算出される可能性が低い。したがって、学習補正値が大きいときに学習係数が大きな値として算出されたとしもて、過剰な学習加算値が算出される可能性が低い。したがって、このとき算出される学習加算値によって更新された学習補正値が基準EGR率取得用の燃料噴射量の算出に用いられ、その燃料噴射量に基づいて取得された基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態(すなわち、EGR制御弁開度)の制御に用いられたとしても、混合気の空燃比の制御が不安定になることが十分に抑制され、その一方で、学習係数が大きいのであるから学習補正値の学習速度が十分に向上される。
逆に、第1実施形態では、現在用いられている学習補正値が小さいほど学習係数が小さな値に設定される。ここで、学習補正値が小さいことは学習補正値が習熟値から遠いことを意味し、学習補正値が習熟値から遠ければ過剰な瞬時補正値が算出される可能性が高い。したがって、学習係数が大きいと過剰な学習加算値が算出される可能性が高い。上述したように、過剰な学習加算値によって更新された学習補正値が基準EGR率取得用の燃料噴射量の算出に用いられ、その燃料噴射量に基づいて取得された基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態(すなわち、EGR制御弁開度)の制御に用いられると、混合気の空燃比の制御が不安定なる。しかしながら、第1実施形態では、学習係数は学習補正値が小さいほど小さい値に設定されるのだから、過剰な瞬時補正値が算出されたとしても過剰な学習加算値が算出される可能性は低い。したがって、第1実施形態によれば、混合気の空燃比の制御が不安定になることが十分に抑制され、その一方で、学習係数が学習補正値に応じた値に設定されるのであるから学習補正値の学習速度が適正な形で向上される。
つまり、第1実施形態では、新たに算出される学習補正値に対する現在用いられている学習補正値の寄与度、ひいては、制御パラメータ補正値に対する学習補正値の寄与度に応じた学習係数が設定されるのである。
こうした理由から、第1実施形態には、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるという利点がある。
次に、第1実施形態の学習補正値の更新を実行するルーチンの一例について説明する。このルーチンの一例が図4に示されている。なお、図4のルーチンは所定の時間間隔で実行されるルーチン、すなわち、所定の演算周期でもって実行されるルーチンである。
図4のルーチンが開始されると、始めに、ステップ100において、現在の目標燃料噴射量TQと現在の機関回転数Nとが取得される。次いで、ステップ101において、本ステップの実行の直前(すなわち、本ステップの実行時点に最も近い過去の時点)に算出された瞬時補正値KTが取得されるとともに、ステップ100で取得された目標燃料噴射量TQと機関回転数Nとに基づいて図3のマップから学習補正値KGpが取得される。次いで、ステップ101で取得された学習補正値KGpが大きいほど大きい値になるように学習係数KLが設定される。次いで、ステップ103において、ステップ101で取得された瞬時補正値KTおよび学習補正値KTpとステップ102で設定された学習係数KLとを上式6に適用することによって新たな学習補正値KGnが算出される。次いで、ステップ104において、ステップ103で算出された新たな学習補正値KGnがステップ100で取得された目標燃料噴射量TQと機関回転数Nとに対応する図3のマップの学習補正値として保存され、ルーチンが終了する。
なお、第1実施形態の学習係数の設定方法はそのときに用いられている学習補正値が大きいほど大きい学習係数が設定される方法であれば如何なる方法でもよく、たとえば、以下のような方法を採用することができる。次に、この方法を採用した実施形態(以下「第2実施形態」という)について説明する。
第2実施形態では、次式7に示されているように、逐次算出される瞬時補正値に学習係数(以下、第1実施形態の学習係数に対応する第2実施形態の学習係数を「第1学習係数」といい、その詳細は後述する)を乗算して得られる値(すなわち、学習加算値)と、現在用いられている学習補正値に所定の係数(以下この係数を「第2学習係数」といい、その詳細は後述する)を乗算して得られる値とを合算することによって新たな学習補正値が算出される。式7において「KGn」が「新たに算出される学習補正値(すなわち、更新された学習補正値)」であり、「KT」が「瞬時補正値」であり、「KL1」が「第1学習係数」であり、「KGp」が「現在用いられている学習補正値」であり、「KL2」が「第2学習係数」である。
KGn=KT×KL1+KGp×KL2 …(7)
なお、第2実施形態では、第1実施形態と同様に、斯くして算出される新たな学習補正値KGnは図3のマップに保存されている学習補正値KGのうち現在の目標燃料噴射量TQと現在の機関回転数Nとに対応する学習補正値KGとして保存される。そして、機関運転中、空燃比誤差比に基づいて瞬時補正値が算出されるとともに、そのときの目標燃料噴射量TQおよび機関回転数Nに基づいて図3のマップから学習補正値KGが取得される。そして、斯くして取得された学習補正値KGと上述したように算出される瞬時補正値とを上式3に適用することによって制御パラメータ補正値Kが算出される。
次に、第2実施形態の第1学習係数および第2学習係数について説明する。第2実施形態では、次式8に示されているように、逐次算出される瞬時補正値の絶対値に演算周期(すなわち、補正学習値の算出を実行する時間周期)を乗算して得られる値を、逐次算出される瞬時補正値に現在用いられている学習補正値を加算して得られる値の絶対値に基準値を乗算して得られる値で除算した値が可変時定数として算出される。式8において「KV」が「可変時定数」であり、「KT」が「瞬時補正値」であり、「TC」が「演算周期」であり、「KG」が「現在用いられている学習補正値」であり、「KB」が「基準値」である。また、混合気の空燃比を安定した挙動で推定空燃比に収束させるのに適切な制御パラメータ補正値に対する実際の制御パラメータ補正値の誤差の範囲を「許容誤差範囲」と称したとき、基準値とは、実際の制御パラメータ補正値が許容誤差範囲内に収まるように予め実験等によって求められた値である。
KV=(|KT|×TC)/(|KT+KG|×KB) …(8)
そして、第2実施形態では、次式9に示されているように、演算周期に可変時定数を加算して得られる値で演算周期を除算することによって第1学習係数が算出されるとともに、次式10に示されているように、演算周期に可変時定数を加算して得られる値で可変時定数を除算することによって第2学習係数が算出される。式9および式10において「KL1」が「第1学習係数」であり、「KL2」が「第2学習係数」であり、「TC」が「演算周期」であり、「KV」が「可変時定数」である。
KL1=TC/(TC+KV) …(9)
KL2=KV/(TC+KV) …(10)
KL2=KV/(TC+KV) …(10)
次に、第2実施形態から得られる利点について説明する。第1実施形態に関連して説明したように、混合気の空燃比を目標空燃比に早く収束させるという観点では、学習補正値を習熟値に早く到達させることが好ましい。すなわち、学習補正値の学習速度を向上させることが好ましい。
ここで、学習補正値の学習速度を向上させる手段として、第1学習係数を比較的大きい値に設定するという手段が考えられる。しかしながら、これには以下のような不都合がある。すなわち、第1学習係数が比較的大きい一定の値に固定されている場合、過剰に大きな瞬時補正値が算出されると、過剰に大きな学習加算値が算出される可能性がある。ここで、過剰に大きな学習加算値が算出され、この学習加算値を用いて新たな学習補正値が算出される(すなわち、学習補正値が更新される)と、過剰に大きな学習補正値が算出されることになる。そして、この過剰に大きな学習補正値が制御パラメータ補正値の算出に用いられ、この制御パラメータ補正値によって目標燃料噴射量が補正され、この補正された目標燃料噴射量を用いて基準EGR率が取得され、この基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態の制御に用いられると、混合気の空燃比が不安定な挙動を示しながら変化することになる。つまり、混合気の空燃比の制御が不安定になる。しかしながら、混合気の空燃比の制御が不安定であることは好ましくない。しかも、混合気の空燃比の制御が不安定な状態で学習補正値の学習が進行したとしても結果的には学習補正値を早く習熟値に到達させることはできない(すなわち、学習補正値の学習速度は向上されない)。しかしながら、第1学習係数を比較的小さい一定の値に固定すれば混合気の空燃比の制御は安定するが学習補正値を早く習熟値に到達させることはできない。
そして、このことは第2学習係数が比較的大きな値に固定されていようとも比較的小さな値に固定されていようとも等しく当てはまる。
つまり、混合気の空燃比を好ましい形態で制御するためには混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、第1学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできないのである。
しかしながら、第2実施形態では、上式8から判るように、学習補正値KGが大きいほど可変時定数KVは小さい値として算出される。そして、上式9から判るように、可変時定数KVが小さいほど第1学習係数KL1は大きい値として算出される。つまり、学習補正値KGが大きいほど第1学習係数KL1は大きい値として算出されるのである。ここで、学習補正値が大きいことは学習補正値が習熟値に近いことを意味し、学習補正値が習熟値に近ければ過剰な瞬時補正値が算出される可能性が低い。したがって、学習補正値が大きいときに第1学習係数が大きな値として算出されたとしもて、過剰な学習加算値が算出される可能性が低い。したがって、このとき算出される学習加算値によって更新された学習補正値が基準EGR率取得用の燃料噴射量の算出に用いられ、その燃料噴射量に基づいて取得された基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態(すなわち、EGR制御弁開度)の制御に用いられたとしても、混合気の空燃比の制御が不安定になることが十分に抑制され、その一方で、第1学習係数が大きいのであるから、学習補正値の学習速度が十分に向上される。
逆に、第2実施形態では、学習補正値が小さいほど第1学習係数は小さい値として算出される。ここで、学習補正値が小さいことは学習補正値が習熟値から遠いことを意味し、学習補正値が習熟値から遠ければ過剰な瞬時補正値が算出される可能性が高い。したがって、第1学習係数が大きいと過剰な学習加算値が算出される可能性が高い。上述したように、過剰な学習加算値によって更新された学習補正値が基準EGR率取得用の燃料噴射量の算出に用いられ、その燃料噴射量に基づいて取得された基準EGR率に基づいて目標EGR率が設定され、この目標EGR率がEGR制御弁の動作状態(すなわち、EGR制御弁開度)の制御に用いられると、混合気の空燃比の制御が不安定なる。しかしながら、第1実施形態では、第1学習係数は学習補正値が小さいほど小さい値として算出されるのだから、過剰な瞬時補正値が算出されたとしても過剰な学習加算値が算出される可能性は低い。したがって、第2実施形態によれば、混合気の空燃比の制御が不安定になることが十分に抑制され、その一方で、第1学習係数が学習補正値に応じた値に設定されるのであるから、学習補正値の学習速度が適正な形で向上される。
つまり、第2実施形態でも、第1実施形態と同様に、新たに算出される学習補正値に対する現在用いられている学習補正値の寄与度、ひいては、制御パラメータ補正値に対する学習補正値の寄与度に応じた第1学習係数が算出されるのである。
こうした理由から、第2実施形態には、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるという利点がある。
なお、混合気の空燃比の制御を安定性の確保と学習補正値の学習速度の向上とを同時に達成するという観点から、可変時定数に上限値がある場合、第2実施形態において、上式8から算出された可変時定数KVがその上限値よりも大きいか否かを判定し、上式8から算出された可変時定数がその上限値よりも大きいときにこの上限値を第1学習係数および第2学習係数の算出に実際に用いられる可変時定数として採用するようにしてもよい。つまり、上式8から算出される可変時定数をその上限値にガードするようにしてもよい。もちろん、上式8から算出された可変時定数がその上限値以下であるときには同算出された可変時定数を第1学習係数および第2学習係数の算出に実際に用いられる可変時定数として採用すればよい。同様に、混合気の空燃比の制御を安定性の確保と学習補正値の学習速度の向上とを同時に達成するという観点から、可変時定数に下限値がある場合、第2実施形態において、上式8から算出された可変時定数KVがその下限値よりも小さいか否かを判定し、上式8から算出された可変時定数がその下限値よりも小さいときにこの下限値を第1学習係数および第2学習係数の算出に実際に用いられる可変時定数として採用するようにしてもよい。つまり、上式8から算出される可変時定数をその下限値にガードするようにしてもよい。もちろん、上式8から算出された可変時定数がその下限値以上であるときには同算出された可変時定数を第1学習係数および第2学習係数の算出に実際に用いられる可変時定数として採用すればよい。
また、第2実施形態では、第1学習係数だけでなく第2学習係数も学習補正値に応じて変化する。しかしながら、これに代えて、第2学習係数が一定の値に固定されていてもよい。
また、第2実施形態において、学習補正値の学習速度を向上させる観点では、制御パラメータ補正値が許容補正値範囲内に収まることを条件として可能な限り大きな第1学習係数が算出されるように基準値を設定することが好ましい。
次に、第2実施形態の学習補正値の更新を実行するルーチンの一例について説明する。このルーチンの一例が図5に示されている。なお、図5のルーチンは所定の時間間隔で実行されるルーチン、すなわち、所定の演算周期でもって実行されるルーチンである。
図5のルーチンが開始されると、始めに、ステップ200において、現在の目標燃料噴射量TQと現在の機関回転数Nとが取得される。次いで、ステップ201において、本ステップの実行の直前(すなわち、本ステップの実行時点に最も近い過去の時点)に算出された瞬時補正値KTが取得されるとともに、ステップ200で取得された目標燃料噴射量TQと機関回転数Nとに基づいて図3のマップから学習補正値KGpが取得される。次いで、ステップ201で取得された瞬時補正値KTおよび学習補正値KGpを上式8に適用することによって可変時定数KVが算出される。次いで、ステップ203において、ステップ202で算出された可変時定数KVを上式9に適用することによって第1学習係数KL1が算出されるとともに、ステップ202で算出された可変時定数KVを上式10に適用することによって第2学習係数KL2が算出される。次いで、ステップ204において、ステップ201で取得された瞬時補正値KTおよび学習補正値KTpとステップ203で算出された第1学習係数KL1および第2学習係数KL2とを上式7に適用することによって新たな学習補正値KGnが算出される。次いで、ステップ205において、ステップ204で算出された新たな学習補正値KGnがステップ200で取得された目標燃料噴射量TQと機関回転数Nとに対応する図3のマップの学習補正値として保存され、ルーチンが終了する。
ところで、第1実施形態の技術思想は、広く捉えれば、新たに算出された学習補正値を用いて制御パラメータ補正値が算出され、この制御パラメータ補正値によって補正された目標燃料噴射量と機関回転数とに応じた基準EGR率が図2(C)のマップから取得され、この取得された基準EGR率が目標EGR率に設定され、この設定された目標EGR率に従ってEGR制御弁の動作状態(すなわち、EGR制御弁の開度)が制御された場合に、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができるか否かに応じて学習係数を設定するという技術思想である。そして、第1実施形態の技術思想をこのように捉えた場合、こうした技術思想を具体化する実施形態として、以下のような実施形態を挙げることもできる。次に、この実施形態(以下「第3実施形態」)について説明する。なお、第3実施形態の制御装置が適用される内燃機関は図1に示されている内燃機関である。また、以下の説明において言及されていない第3実施形態の構成は第1実施形態の構成と同じである。
第3実施形態では、第1実施形態と同様に目標EGR率が設定される。すなわち、上式2に示されているように、機関運転中に設定される目標燃料噴射量に制御パラメータ補正値を乗算して得られる燃料噴射量を図2(C)のマップから基準EGR率の取得用の燃料噴射量とするとともにそのときの機関回転数を図2(C)のマップからの基準EGR率の取得用の機関回転数として図2(C)のマップから基準EGR率が取得される。そして、この取得された基準EGR率が目標EGR率に設定される。
また、第3実施形態では、第1実施形態と同様に制御パラメータ補正値が算出される。すなわち、上式3に示されているように、瞬時補正値KTと学習補正値KGと「1」とを合算することによって制御パラメータ補正値Kが算出される。
また、第3実施形態では、第1実施形態と同様に瞬時補正値が算出される。すなわち、上式4に示されているように、推定空燃比AFeを検出空燃比AFdによって除算した値(すなわち、空燃比誤差比)Rafが算出される。ここで、推定空燃比AFeは、上式5に示されているように、制御パラメータ補正値Kを目標燃料噴射量TQに乗算して得られる値によって吸入空気量Gaを除算することによって得られる値である。
そして、空燃比誤差比が「1」ではないとき(つまり、検出空燃比が推定空燃比に一致していないとき)には、空燃比誤差比が「1」になるように基準EGR率の取得に用いられる燃料噴射量を算出するための目標燃料噴射量の補正に現在用いられている制御パラメータ補正値を補正することによって空燃比誤差比を「1」にすることができる制御パラメータ補正値に対する補正値が瞬時補正値として算出される。
また、第3実施形態では、第1実施形態と同様に学習補正値が算出される。すなわち、上式6に示されているように、逐次算出される瞬時補正値KTに学習係数KLを乗算して得られる学習加算値と現在用いられている学習補正値KGpとを合算することによって新たな学習補正値KGnが算出される。
なお、第1実施形態と同様に、斯くして算出される新たな学習補正値は図3のマップに保存されている学習補正値のうち現在の目標燃料噴射量と現在の機関回転数とに対応する学習補正値として保存される。そして、機関運転中、上述したように空燃比誤差比に基づいて瞬時補正値が算出されるとともに、そのときの目標燃料噴射量および機関回転数に基づいて図3のマップから学習補正値が取得される。そして、斯くして取得された学習補正値と上述したように算出される瞬時補正値とを上式3に適用することによって制御パラメータ補正値が算出される。
次に、第3実施形態の学習係数について説明する。第3実施形態では、規定の学習係数が予め設定される。そして、この規定の学習係数を用いて学習補正値が更新され、斯くして更新される学習補正値を用いて制御パラメータ補正値が算出され、斯くして算出される制御パラメータ補正値によって補正された目標燃料噴射量と機関回転数とに応じた基準EGR率が図2(C)のマップから取得され、この取得された基準EGR率が目標EGR率に設定され、この設定された目標EGR率に従ってEGR制御弁の動作状態(すなわち、EGR制御弁開度)が制御された場合に、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる制御パラメータ補正値の範囲(以下この範囲を「許容補正値範囲」という)が実験等によって予め求められる。
そして、機関運転中、算出される制御パラメータ補正値が上記許容補正値範囲内にあるか否かが判定される。ここで、制御パラメータ補正値が許容補正値範囲内にあると判定されたときには、規定の学習係数が学習補正値の更新に実際に用いられる学習係数としてそのまま採用される。
一方、制御パラメータ補正値が許容補正値範囲内にないと判定されたときには、制御パラメータ補正値が許容補正値範囲の上限値(以下この上限値を「許容上限値」という)よりも大きいか否かが判定される。ここで、制御パラメータ補正値が許容上限値よりも大きいと判定されたときには、制御パラメータ補正値を許容上限値に一致させることができる学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。つまり、制御パラメータ補正値が許容上限値よりも大きいと判定されたときには、制御パラメータ補正値が許容上限値に一致するように規定の学習係数が補正され、この補正された学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。
一方、制御パラメータ補正値が許容上限値よりも大きくないと判定されたとき、すなわち、制御パラメータ補正値が許容補正値範囲の下限値(以下この下限値を「許容下限値」という)よりも小さいときには、制御パラメータ補正値を許容下限値に一致させることができる学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。つまり、制御パラメータ補正値が許容下限値よりも小さいときには、制御パラメータ補正値が許容下限値に一致するように規定の学習係数が補正され、この補正された学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。
次に、第3実施形態から得られる利点について説明する。第1実施形態に関連して説明したように、混合気の空燃比を好ましい形態で制御するためには混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、第1学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできない。
しかしながら、第3実施形態では、制御パラメータ補正値が許容補正値範囲内にないとき、すなわち、規定の学習係数を用いて学習補正値の更新が行われると混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができないときには、制御パラメータ補正値が許容補正値範囲内の値になるように規定の学習係数が補正され、この補正された学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。より具体的には、制御パラメータ補正値が許容上限値よりも大きく、したがって、制御パラメータ補正値が許容補正値範囲内にないときには、制御パラメータ補正値が許容上限値に一致するように規定の学習係数が補正され、この補正された学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。これによれば、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる。つまり、混合気の空燃比の制御の安定が確保される。一方、制御パラメータ補正値が許容下限値よりも小さく、したがって、制御パラメータ補正値が許容補正値範囲内にないときには、制御パラメータ補正値が許容下限値に一致するように規定の学習係数が補正され、この補正された学習係数が学習補正値の更新に実際に用いられる学習係数として採用される。これによれば、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる。つまり、混合気の空燃比の制御の安定性が確保される。
さらに、第3実施形態では、制御パラメータ補正値が許容補正値範囲内にないときにのみ規定の学習係数が補正される。すなわち、混合気の空燃比の制御の安定性が確保されないときにのみ規定の学習係数が補正される。したがって、全体として、学習補正値の更新に実際に用いられる学習係数は学習補正値の学習速度を高く維持することができる学習係数に設定される。このため、第3実施形態によれば、全体として、学習補正値の学習速度の向上が図られている。
つまり、第3実施形態では、新たに算出される学習補正値に対する現在用いられている学習補正値の寄与度、ひいては、制御パラメータ補正値に対する学習補正値の寄与度に応じた学習係数が算出されるのである。
こうした理由から、第3実施形態には、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるという利点がある。
なお、第3実施形態では、制御パラメータ補正値が許容上限値よりも大きいときに制御パラメータ補正値が許容上限値に一致するように規定の学習係数が補正される。しかしながら、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成するためには、広くは、制御パラメータ補正値が許容上限値よりも大きいときに制御パラメータ補正値が許容補正値範囲内の値になるように規定の学習係数を補正するようにしてもよい。また、第3実施形態では、制御パラメータ補正値が許容下限値よりも小さいときに制御パラメータ補正値が許容下限値に一致するように規定の学習係数が補正される。しかしながら、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成するためには、広くは、制御パラメータ補正値が許容下限値よりも小さいときに制御パラメータ補正値が許容補正値範囲内の値になるように規定の学習係数を補正するようにしてもよい。
また、第3実施形態では、制御パラメータ補正値が許容補正値範囲内にないときにのみ規定の学習係数が補正される。しかしながら、これに加えて、制御パラメータ補正値が許容補正値範囲内にあるときに制御パラメータ補正値が許容補正値内に収まる範囲で学習係数を補正するようにしてもよい。この場合、学習補正値の学習速度を向上させる観点では、制御パラメータ補正値が許容補正値範囲内にあるときに制御パラメータ補正値を許容補正値範囲内に収めることができる学習係数のうち最も大きい学習係数となるように規定の学習係数を補正するようにすることが好ましい。
次に、第3実施形態の学習補正値の更新を実行するルーチンの一例について説明する。このルーチンの一例は図6および図7に示されている。なお、図6および図7のルーチンは所定の時間間隔で実行されるルーチン、すなわち、所定の演算周期でもって実行されるルーチンである。
図6および図7のルーチンが開始されると、始めに、ステップ300において、現在の目標燃料噴射量TQと現在の機関回転数Nとが取得される。次いで、ステップ301において、本ステップの実行の直前(すなわち、本ステップの実行時点に最も近い過去の時点)に算出された制御パラメータ補正値Kおよび瞬時補正値KTが取得されるとともに、ステップ300で取得された目標燃料噴射量TQと機関回転数Nとに基づいて図3のマップから学習補正値KGpが取得される。次いで、ステップ302において、ステップ301で取得された制御パラメータ補正値Kが許容補正値範囲内にある(Kmin≦K<Kmax)か否かが判別される。ここで、制御パラメータ補正値Kが許容補正値範囲内にあると判別されたときには、ルーチンはステップ303に進む。一方、制御パラメータ補正値Kが許容補正値範囲内にないと判別されたときには、ルーチンは図7のステップ306に進む。
ステップ302において制御パラメータ補正値Kが許容補正値範囲内にあると判別され、ルーチンがステップ303に進むと、規定の学習係数KL1pが学習係数KL1に入力され、ルーチンがステップ304に進む。
ステップ302において制御パラメータ補正値Kが許容補正値範囲内にないと判別され、ルーチンが図7のステップ306に進むと、ステップ301で取得された制御パラメータ補正値Kが許容補正値範囲の上限値Kmaxよりも大きい(Kmax<K)か否かが判別される。ここで、Kmax<Kであると判別されたときには、ルーチンはステップ307に進む。一方、Kmax<Kではないと判別されたときには、ルーチンはステップ309に進む。
ステップ306においてKmax<Kであると判別され、ルーチンがステップ307に進むと、ステップ301で取得された制御パラメータ補正値Kを上限値Kmaxに一致させることができるように規定の学習係数が補正されることによって補正学習係数KLaが算出される。次いで、ステップ308において、ステップ307で算出された補正学習係数KLaが学習係数KLに入力され、ルーチンがステップ304に進む。
ステップ306においてKmax<Kではないと判別され、すなわち、ステップ301で取得された制御パラメータ補正値Kが許容補正値範囲の下限値Kminよりも小さく、ルーチンがステップ309に進むと、ステップ301で取得された制御パラメータ補正値Kを下限値Kminに一致させることができるように規定の学習係数が補正されることによって補正学習係数KLaが算出される。次いで、ステップ310において、ステップ309で算出された補正学習係数KLaが学習係数KLに入力され、ルーチンがステップ304に進む。
図6のステップ304では、新たな学習補正値KGnが算出される。より具体的には、ルーチンがステップ303からステップ304に進んだ場合には、ステップ303で規定の学習係数KLpが入力された学習係数KLとステップ301で取得された瞬時補正値KTおよび学習補正値KGpとを上式6に適用することによって新たな学習補正値KGnが算出される。ルーチンがステップ308からステップ304に進んだ場合には、ステップ308で補正学習係数KLaが入力された学習係数KLとステップ301で取得された瞬時補正値KTおよび学習補正値KGpとを上式6に適用することによって新たな学習補正値KGnが算出される。ルーチンがステップ310からステップ304に進んだ場合には、ステップ310で補正学習係数KLaが入力された学習係数KLとステップ301で取得された瞬時補正値KTおよび学習補正値KGpとを上式6に適用することによって新たな学習補正値KGnが算出される。次いで、ステップ305において、ステップ304で算出された新たな学習補正値KGnがステップ300で取得された目標燃料噴射量TQと機関回転数Nとに対応して電子制御装置に保存される。
ところで、第2実施形態の技術思想は、広く捉えれば、新たに算出された学習補正値を用いて制御パラメータ補正値が算出され、この制御パラメータ補正値によって補正された目標燃料噴射量と機関回転数とに応じた基準EGR率が図2(C)のマップから取得され、この取得された基準EGR率が目標EGR率に設定され、この設定された目標EGR率に従ってEGR制御弁の動作状態(すなわち、EGR制御弁の開度)が制御された場合に、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができるか否かに応じて第1学習係数を設定するという技術思想である。そして、第2実施形態の技術思想をこのように捉えた場合、こうした技術思想を具体化する実施形態として、以下のような実施形態を挙げることもできる。次に、この実施形態(以下「第4実施形態」)について説明する。なお、第4実施形態の制御装置が適用される内燃機関は図1に示されている内燃機関である。また、以下の説明において言及されていない第4実施形態の構成は第2実施形態の構成と同じである。
第4実施形態では、第2実施形態と同様に目標EGR率が設定される。すなわち、上式2に示されているように、機関運転中に設定される目標燃料噴射量に制御パラメータ補正値を乗算して得られる燃料噴射量を図2(C)のマップから基準EGR率の取得用の燃料噴射量とするとともにそのときの機関回転数を図2(C)のマップからの基準EGR率の取得用の機関回転数として図2(C)のマップから基準EGR率が取得される。そして、この取得された基準EGR率が目標EGR率に設定される。
また、第4実施形態では、第2実施形態と同様に制御パラメータ補正値が算出される。すなわち、上式3に示されているように、瞬時補正値KTと学習補正値KGと「1」とを合算することによって制御パラメータ補正値Kが算出される。
また、第4実施形態では、第2実施形態と同様に瞬時補正値が算出される。すなわち、上式4に示されているように、推定空燃比AFeを検出空燃比AFdによって除算した値(すなわち、空燃比誤差比)Rafが算出される。ここで、推定空燃比AFeは、上式5に示されているように、制御パラメータ補正値Kを目標燃料噴射量TQに乗算して得られる値によって吸入空気量Gaを除算することによって得られる値である。
そして、空燃比誤差比が「1」ではないとき(つまり、検出空燃比が推定空燃比に一致していないとき)には、空燃比誤差比が「1」になるように基準EGR率の取得に用いられる燃料噴射量を算出するための目標燃料噴射量の補正に現在用いられている制御パラメータ補正値を補正することによって空燃比誤差比を「1」にすることができる制御パラメータ補正値に対する補正値が瞬時補正値として算出される。
また、第4実施形態では、第2実施形態と同様に学習補正値が算出される。すなわち、上式7に示されているように、逐次算出される瞬時補正値KTに第1学習係数KL1を乗算して得られる学習加算値と現在用いられている学習補正値KGpに第2学習係数KL2を乗算して得られる値とを合算することによって新たな学習補正値KGnが算出される。
なお、第4実施形態では、第2実施形態と同様に、斯くして算出される新たな学習補正値は図3のマップに保存されている学習補正値のうち現在の目標燃料噴射量と現在の機関回転数とに対応する学習補正値として保存される。そして、機関運転中、空燃比誤差比に基づいて瞬時補正値が算出されるとともに、そのときの目標燃料噴射量および機関回転数に基づいて図3のマップから学習補正値が取得される。そして、斯くして取得された学習補正値と上述したように算出される瞬時補正値とを上式3に適用することによって制御パラメータ補正値が算出される。
次に、第4実施形態の第1学習係数および第2学習係数について説明する。第4実施形態では、次式11に示されているように、演算周期に固定時定数を加算して得られる値で演算周期を除算して得られる値が規定の第1学習係数として予め設定され、また、次式12に示されているように、演算周期に固定時定数を加算して得られる値で固定時定数を除算して得られる値が規定の第2学習係数として予め設定される。式11および式12において「KL1」が「規定の第1学習係数」であり、「KL2」が「規定の第2学習係数」であり、「TC」が「演算周期」であり、「KF」が「固定時定数」である。なお、固定時定数は、第1実施形態の可変時定数とは異なり、学習補正値の値にかかわらず一定の値である。
KL1=TC/(TC+KF) …(11)
KL2=KF/(TC+KF) …(12)
KL2=KF/(TC+KF) …(12)
そして、第4実施形態では、このように予め設定された規定の第1学習係数および規定の第2学習係数を用いて学習補正値が更新され、斯くして更新される学習補正値を用いて制御パラメータ補正値が算出され、斯くして算出される制御パラメータ補正値によって補正された目標燃料噴射量と機関回転数とに応じた基準EGR率が図2(C)のマップから取得され、この取得された基準EGR率が目標EGR率に設定され、この設定された目標EGR率に従ってEGR制御弁の動作状態(すなわち、EGR制御弁開度)が制御された場合に、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる制御パラメータ補正値の範囲(以下この範囲を「許容補正値範囲」という)が実験等によって予め求められる。
そして、機関運転中、算出される制御パラメータ補正値が上記許容補正値範囲内にあるか否かが判定される。ここで、制御パラメータ補正値が許容補正値範囲内にあると判定されたときには、規定の第1学習係数が学習補正値の更新に実際に用いられる第1学習係数としてそのまま採用される。
一方、制御パラメータ補正値が許容補正値範囲内にないと判定されたときには、制御パラメータ補正値が許容補正値範囲の上限値(以下この上限値を「許容上限値」という)よりも大きいか否かが判定される。ここで、制御パラメータ補正値が許容上限値よりも大きいと判定されたときには、制御パラメータ補正値を許容上限値に一致させることができる第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。つまり、制御パラメータ補正値が許容上限値よりも大きいと判定されたときには、制御パラメータ補正値が許容上限値に一致するように規定の第1学習係数が補正され、この補正された第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。
一方、制御パラメータ補正値が許容上限値よりも大きくないと判定されたとき、すなわち、制御パラメータ補正値が許容補正値範囲の下限値(以下この下限値を「許容下限値」という)よりも小さいときには、制御パラメータ補正値を許容下限値に一致させることができる第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。つまり、制御パラメータ補正値が許容下限値よりも小さいときには、制御パラメータ補正値が許容下限値に一致するように規定の第1学習係数が補正され、この補正された第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。
なお、第4実施形態では、制御パラメータ補正値が許容補正値範囲内にあるか否かにかかわらず、規定の第2学習係数が学習補正値の更新に実際に用いられる第2学習係数としてそのまま採用される。
次に、第4実施形態から得られる利点について説明する。第1実施形態に関連して説明したように、混合気の空燃比を好ましい形態で制御するためには混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、第1学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできない。
しかしながら、第4実施形態では、制御パラメータ補正値が許容補正値範囲内にないとき、すなわち、規定の第1学習係数を用いて学習補正値の更新が行われると混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができないときには、制御パラメータ補正値が許容補正値範囲内の値になるように規定の第1学習係数が補正され、この補正された第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。より具体的には、制御パラメータ補正値が許容上限値よりも大きく、したがって、制御パラメータ補正値が許容補正値範囲内にないときには、制御パラメータ補正値が許容上限値に一致するように規定の第1学習係数が補正され、この補正された第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。これによれば、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる。つまり、混合気の空燃比の制御の安定が確保される。一方、制御パラメータ補正値が許容下限値よりも小さく、したがって、制御パラメータ補正値が許容補正値範囲内にないときには、制御パラメータ補正値が許容下限値に一致するように規定の第1学習係数が補正され、この補正された第1学習係数が学習補正値の更新に実際に用いられる第1学習係数として採用される。これによれば、混合気の空燃比を推定空燃比に向かって安定した挙動で制御することができる。つまり、混合気の空燃比の制御の安定性が確保される。
さらに、第4実施形態では、制御パラメータ補正値が許容補正値範囲内にないときにのみ規定の第1学習係数が補正される。すなわち、混合気の空燃比の制御の安定性が確保されないときにのみ規定の第1学習係数が補正される。したがって、全体として、学習補正値の更新に実際に用いられる第1学習係数は学習補正値の学習速度を高く維持することができる第1学習係数に設定される。このため、第4実施形態によれば、全体として、学習補正値の学習速度の向上が図られている。
つまり、第4実施形態では、新たに算出される学習補正値に対する現在用いられている学習補正値の寄与度、ひいては、制御パラメータ補正値に対する学習補正値の寄与度に応じた第1学習係数が算出されるのである。
こうした理由から、第4実施形態には、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるという利点がある。
なお、第4実施形態では、制御パラメータ補正値が許容上限値よりも大きいときに制御パラメータ補正値が許容上限値に一致するように規定の第1学習係数が補正される。しかしながら、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成するためには、広くは、制御パラメータ補正値が許容上限値よりも大きいときに制御パラメータ補正値が許容補正値範囲内の値になるように規定の第1学習係数を補正するようにしてもよい。また、第2実施形態では、制御パラメータ補正値が許容下限値よりも小さいときに制御パラメータ補正値が許容下限値に一致するように規定の第1学習係数が補正される。しかしながら、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成するためには、広くは、制御パラメータ補正値が許容下限値よりも小さいときに制御パラメータ補正値が許容補正値範囲内の値になるように規定の第1学習係数を補正するようにしてもよい。
また、第4実施形態では、制御パラメータ補正値が許容上限値よりも大きいときに規定の第1学習係数のみが補正される。しかしながら、これに加えて、制御パラメータ補正値が許容上限値よりも大きいときに規定の第2学習係数を補正するようにしてもよい。この場合、具体的には、制御パラメータ補正値が許容上限値よりも大きいときには、制御パラメータ補正値が許容上限値に一致するように規定の第1学習係数および規定の第2学習係数が補正され、これら補正された第1学習係数および第2学習係数が学習補正値の更新に実際に用いられる第1学習係数および第2学習係数としてそれぞれ採用される。一方、制御パラメータ補正値が許容下限値よりも小さいときには、制御パラメータ補正値が許容下限値に一致するように規定の第1学習係数および規定の第2学習係数が補正され、これら補正された第1学習係数および第2学習係数が学習補正値の更新に実際に用いられる第1学習係数および第2学習係数としてそれぞれ採用される。
また、第4実施形態では、制御パラメータ補正値が許容補正値範囲内にないときにのみ規定の第1学習係数が補正される。しかしながら、これに加えて、制御パラメータ補正値が許容補正値範囲内にあるときに制御パラメータ補正値が許容補正値内に収まる範囲で第1学習係数を補正するようにしてもよい。この場合、学習補正値の学習速度を向上させる観点では、制御パラメータ補正値が許容補正値範囲内にあるときに制御パラメータ補正値を許容補正値範囲内に収めることができる第1学習係数のうち最も大きい第1学習係数となるように規定の第1学習係数を補正するようにすることが好ましい。
次に、第4実施形態の学習補正値の更新を実行するルーチンの一例について説明する。このルーチンの一例は図8および図9に示されている。なお、図8および図9のルーチンは所定の時間間隔で実行されるルーチン、すなわち、所定の演算周期でもって実行されるルーチンである。
図8および図9のルーチンが開始されると、始めに、ステップ400において、現在の目標燃料噴射量TQと現在の機関回転数Nとが取得される。次いで、ステップ401において、本ステップの実行の直前(すなわち、本ステップの実行時点に最も近い過去の時点)に算出された制御パラメータ補正値Kおよび瞬時補正値KTが取得されるとともに、ステップ400で取得された目標燃料噴射量TQと機関回転数Nとに基づいて図3のマップから学習補正値KGpが取得される。次いで、ステップ402において、ステップ401で取得された制御パラメータ補正値Kが許容補正値範囲内にある(Kmin≦K<Kmax)か否かが判別される。ここで、制御パラメータ補正値Kが許容補正値範囲内にあると判別されたときには、ルーチンはステップ403に進む。一方、制御パラメータ補正値Kが許容補正値範囲内にないと判別されたときには、ルーチンは図9のステップ406に進む。
ステップ402において制御パラメータ補正値Kが許容補正値範囲内にあると判別され、ルーチンがステップ403に進むと、規定の第1学習係数KL1pが第1学習係数KL1に入力されるとともに、規定の第2学習係数KL2pが第2学習係数KL2に入力され、ルーチンがステップ404に進む。
ステップ402において制御パラメータ補正値Kが許容補正値範囲内にないと判別され、ルーチンが図9のステップ406に進むと、ステップ401で取得された制御パラメータ補正値Kが許容補正値範囲の上限値Kmaxよりも大きい(Kmax<K)か否かが判別される。ここで、Kmax<Kであると判別されたときには、ルーチンはステップ407に進む。一方、Kmax<Kではないと判別されたときには、ルーチンはステップ409に進む。
ステップ406においてKmax<Kであると判別され、ルーチンがステップ407に進むと、ステップ401で取得された制御パラメータ補正値Kを上限値Kmaxに一致させることができるように規定の第1学習係数が補正されることによって補正第1学習係数KL1aが算出される。次いで、ステップ408において、ステップ407で算出された補正第1学習係数KL1aが第1学習係数KL1に入力されるとともに、規定の第2学習係数KL2pが第2学習係数KL2に入力され、ルーチンがステップ404に進む。
ステップ406においてKmax<Kではないと判別され、すなわち、ステップ401で取得された制御パラメータ補正値Kが許容補正値範囲の下限値Kminよりも小さく、ルーチンがステップ409に進むと、ステップ401で取得された制御パラメータ補正値Kを下限値Kminに一致させることができるように規定の第1学習係数が補正されることによって補正第1学習係数KL1aが算出される。次いで、ステップ410において、ステップ409で算出された補正第1学習係数KL1aが第1学習係数KL1に入力されるとともに、規定の第2学習係数KL2pが第2学習係数KL2に入力され、ルーチンがステップ404に進む。
図8のステップ404では、新たな学習補正値KGnが算出される。より具体的には、ルーチンがステップ403からステップ404に進んだ場合には、ステップ403で規定の第1学習係数KL1pが入力された第1学習係数KL1とステップ403で規定の第2学習係数KL2pが入力された第2学習係数KL2とステップ401で取得された瞬時補正値KTおよび学習補正値KGpとを上式7に適用することによって新たな学習補正値KGnが算出される。ルーチンがステップ408からステップ404に進んだ場合には、ステップ408で補正第1学習係数KL1aが入力された第1学習係数KL1とステップ408で規定の第2学習係数KL1pが入力された第2学習係数KL2とステップ401で取得された瞬時補正値KTおよび学習補正値KGpとを上式7に適用することによって新たな学習補正値KGnが算出される。ルーチンがステップ410からステップ404に進んだ場合には、ステップ410で補正第1学習係数KL1aが入力された第1学習係数KL1とステップ410で規定の第2学習係数KL1pが入力された第2学習係数KL2とステップ401で取得された瞬時補正値KTおよび学習補正値KGpとを上式7に適用することによって新たな学習補正値KGnが算出される。次いで、ステップ405において、ステップ404で算出された新たな学習補正値KGnがステップ400で取得された目標燃料噴射量TQと機関回転数Nとに対応して電子制御装置に保存される。
ところで、上述した実施形態はEGR制御弁によってEGR率を制御することによって混合気の空燃比を推定空燃比に一致させる制御を実行する制御装置に本発明を適用した実施形態である。しかしながら、本発明はEGR装置を備えていない内燃機関においてスロットル弁によって吸入空気量を制御することによって混合気の空燃比を推定空燃比に一致させる制御を実行する制御装置にも適用可能である。次に、こうした制御装置に本発明を適用した場合の実施形態の一例として、こうした制御装置に第1実施形態の技術思想を適用した場合の実施形態(以下「第5実施形態」)について説明する。なお、以下の説明において言及されていない第5実施形態の構成は第1実施形態の構成と同じである。
第5実施形態の制御装置が適用される内燃機関が図10に示されている。図10に示されている内燃機関はEGR装置を備えていない点を除いて図1に示されている内燃機関と同じである。また、第5実施形態の制御装置が適用される内燃機関がEGR装置を備えていないことから、第1実施形態とは異なり、EGR制御弁の制御は行われない。
次に、第5実施形態の燃料噴射弁の制御について説明する。第5実施形態では、アクセルペダルの踏込量に応じて最適な燃料噴射量が実験等によって予め求められる。そして、これら求められた燃料噴射量が図11(A)に示されているようにアクセルペダルの踏込量Dacの関数のマップの形で基準燃料噴射量Qbとして電子制御装置に記憶されている。そして、機関運転中、その時々のアクセルペダルの踏込量Dacに対応する基準燃料噴射量Qbが図11(A)のマップから取得され、この取得された基準燃料噴射量Qbが目標燃料噴射量に設定される。そして、斯くして設定された目標燃料噴射量の燃料が燃料噴射弁から噴射されるように電子制御装置から燃料噴射弁に指令信号が供給される。なお、図11(A)に示されているように、基準燃料噴射量Qbはアクセルペダルの踏込量Dacが大きくなるほど多くなる。
次に、第5実施形態のスロットル弁の制御について説明する。第5実施形態では、図10に示されている内燃機関の運転状態を定常運転状態(すなわち、燃料噴射量と機関回転数とが一定に維持された状態)に維持するとともに内燃機関を取り巻く環境に関するパラメータであって機関運転状態に影響を及ぼすパラメータ(たとえば、大気圧、大気温度、内燃機関の温度などであって、以下このパラメータを「環境パラメータ」という)の値が特定の値にあるという条件のもと、燃料噴射量と機関回転数とに応じた適切なスロットル弁開度が実験等によって予め求められる。そして、これら求められたスロットル弁開度が図11(B)に示されているように燃料噴射量Qと機関回転数Nとの関数のマップの形で基準スロットル弁開度Dthbとして電子制御装置に記憶されている。なお、図11(B)のマップでは、燃料噴射量Qが多いほど基準スロットル弁開度Dthbが大きくなり、機関回転数Nが大きいほど基準スロットル弁開度Dthbが大きくなっている。
そして、次式13に示されているように、機関運転中に設定される目標燃料噴射量に制御パラメータ補正値を乗算して得られる燃料噴射量を図11(B)のマップからの基準スロットル弁開度Dthbの取得用の燃料噴射量Qとするとともにそのときの機関回転数を図11(B)のマップからの基準スロットル弁開度Dthbの取得用の機関回転数Nとして図11(B)のマップから基準スロットル弁開度Dthbが取得される。すなわち、機関運転中に設定される目標燃料噴射量を制御パラメータ補正値によって補正することによって得られる燃料噴射量が図11のマップからの基準スロットル弁開度Dthbの取得に用いられる。なお、式13において「Q」が「図11(B)のマップからの基準スロットル弁開度の取得に用いられる燃料供給量」であり、「TQ」が「目標燃料噴射量」であり、「K」が「制御パラメータ補正値」である。
Q=TQ×K …(13)
そして、図11(B)のマップから取得された基準スロットル弁開度Dthbが目標スロットル弁開度に設定される。そして、スロットル弁開度が斯くして設定された目標スロットル弁開度TDthとなるようにスロットル弁を駆動するようにスロットル弁アクチュエータを駆動させる制御信号が電子制御装置から供給される。
なお、第5実施形態では、第1実施形態と同様に式3に従って制御パラメータ補正値が算出される。
次に、第5実施形態の瞬時補正値について説明する。第5実施形態では、第1実施形態と同様に式4に従って空燃比誤差比が算出される。そして、空燃比誤差比が「1」ではないとき(つまり、検出空燃比が推定空燃比に一致していないとき)には、空燃比誤差比が「1」になるように基準スロットル弁開度の取得に用いられる燃料噴射量を算出するための目標燃料噴射量の補正に現在用いられている制御パラメータ補正値を補正することによって空燃比誤差比を「1」にすることができる制御パラメータ補正値に対する補正値が瞬時補正値として算出される。別の言い方をすれば、空燃比誤差比が「1」ではないときには、空燃比誤差比が「1」になるように基準スロットル弁開度の取得に用いられる燃料噴射量を算出するための目標燃料供給量の補正に現在用いられている制御パラメータ補正値によって目標燃料噴射量を補正することを前提にして現在の目標燃料噴射量を補正することによって空燃比誤差比を「1」にすることができる目標燃料噴射量に対する補正値が瞬時補正値として算出される。
次に、第5実施形態の学習補正値について説明する。第5実施形態では、第1実施形態と同様に式6に従って新たな学習補正値が算出される。なお、斯くして算出される新たな学習補正値KGnは図12のマップに保存されている学習補正値KGのうち現在の目標燃料噴射量TQと現在の機関回転数Nとに対応する学習補正値KGとして保存される。こうした新たな学習補正値の算出とその保存とが学習補正値の更新に相当する。そして、機関運転中、上述したように空燃比誤差比に基づいて瞬時補正値が算出されるとともに、そのときの目標燃料噴射量TQおよび機関回転数Nに基づいて図12のマップから学習補正値KGが取得される。そして、斯くして取得された学習補正値KGと上述したように算出される瞬時補正値とを式3に適用することによって制御パラメータ補正値Kが算出される。なお、図12のマップに保存されている学習補正値KGの初期値は「0」である
次に、第5実施形態の学習係数について説明する。第5実施形態では、現時アクチュエータ用いられている学習補正値が大きいほど学習係数が大きい値に設定される。なお、第5実施形態では、学習係数は「0」以上の値であって且つ「1」以下の値である。
次に、第5実施形態から得られる利点について説明する。第1実施形態に関連して説明したように、混合気の空燃比を好ましい形態で制御するためには混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することが望ましいが、学習係数を一定の値に固定するという手段を採用する限り、これらを同時に達成することはできない。
しかしながら、第5実施形態では、現在用いられている学習補正値が大きいほど学習係数が大きな値に設定される。つまり、新たに算出される学習補正値に対する現在用いられている学習補正値の寄与度、ひいては、制御パラメータ補正値に対する学習補正値の寄与度に応じた学習係数が設定される。
したがって、第1実施形態に関連して説明した理由と同様の理由から、第5実施形態には、混合気の空燃比の制御の安定性の確保と学習補正値の学習速度の向上とを同時に達成することができるという利点がある。
なお、当然のことながら、EGR装置を備えていない内燃機関においてスロットル弁によって吸入空気量を制御することによって混合気の空燃比を推定空燃比に一致させる制御を実行する制御装置に第2実施形態、第3実施形態、または、第4実施形態の技術思想を適用することもできる。
また、第5実施形態の学習補正値の更新を実行するルーチンとして、たとえば、図4に示されているルーチンを採用することができる。
また、第1実施形態~第4実施形態はEGR制御弁によるEGR率の制御を介して吸入空気量を制御することによって混合気の空燃比を推定空燃比に一致させる制御を実行する制御装置に本発明を適用した実施形態である。しかしながら、本発明はEGR制御弁によるEGR率の制御を介した吸入空気量の制御に加えて、スロットル弁による吸入空気量の制御を実行する制御装置にも適用可能である。
また、第1実施形態~第4実施形態の制御パラメータ補正値は基準EGR率取得用の燃料噴射量を得るために目標燃料噴射量を補正する補正値である。しかしながら、この制御パラメータ補正値が目標燃料噴射量を基準EGR率取得用の燃料噴射量としてそのまま用いて取得された基準EGR率を補正する補正値であってもよい。なお、この場合、制御パラメータ補正値によって補正された基準EGR率が目標EGR率に設定されることになる。
また、第5実施形態の制御パラメータ補正値は基準スロットル弁開度取得用の燃料噴射量を得るために目標燃料噴射量を補正する補正値である。しかしながら、この制御パラメータ補正値が目標燃料噴射量を基準スロットル弁開度取得用の燃料噴射量としてそのまま用いて取得された基準スロットル弁開度を補正する補正値であってもよい。なお、この場合、制御パラメータによって補正された基準スロットル弁開度が目標スロットル弁開度に設定されることになる。
また、上述した実施形態において、瞬時補正値を算出する手法として、いわゆるPI制御(すなわち、比例積分制御)の考え方を利用した手法を採用することができる。この場合、瞬時補正値はいわゆるPI項である。
また、上述した実施形態は圧縮自着火式の内燃機関に本発明を適用した場合の実施形態であるが、本発明は火花点火式の内燃機関(いわゆるガソリンエンジン)にも適用可能である。
Claims (9)
- 制御対象の制御量の目標値である目標制御量を算出し、該算出された目標制御量に制御量を一致させるために目標とすべき制御対象の動作状態である目標動作状態を設定するために用いられるパラメータの値である制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて設定される目標動作状態に従って制御対象の動作状態を制御する内燃機関の制御装置であって、
制御量が目標制御量に一致するように制御対象の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための瞬時補正値を目標制御量に対する制御量の偏差に基づいて算出する制御と、瞬時補正値を補正するための係数である学習係数によって瞬時補正値を補正することによって得られる値である学習加算値を積算することによって学習補正値を算出する制御と、を実行し、新たに算出される瞬時補正値と既に算出されている学習補正値とに基づいて制御パラメータ補正値を算出する内燃機関の制御装置において、
目標制御量に対する制御量の追従の形態として許容される追従の形態が許容追従形態として予め定められており、目標制御量に対する制御量の追従の形態が前記許容追従形態となる制御パラメータ補正値の範囲が許容制御パラメータ補正値範囲として予め定められており、制御パラメータ補正値が前記許容制御パラメータ補正値範囲内に収まるように前記学習係数を設定する内燃機関の制御装置。 - 制御対象の制御量の目標値である目標制御量を算出し、該算出された目標制御量に制御量を一致させるために目標とすべき制御対象の動作状態である目標動作状態を設定するために用いられるパラメータの値である制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて設定される目標動作状態に従って制御対象の動作状態を制御する内燃機関の制御装置であって、
制御量が目標制御量に一致するように制御対象の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための瞬時補正値を目標制御量に対する制御量の偏差に基づいて算出する制御と、瞬時補正値を補正するための係数である学習係数によって瞬時補正値を補正することによって得られる値である学習加算値を積算することによって学習補正値を算出する制御と、を実行し、新たに算出される瞬時補正値と既に算出されている学習補正値とに基づいて制御パラメータ補正値を算出する内燃機関の制御装置において、
既に算出されている学習補正値が大きいほど大きい学習係数を設定する内燃機関の制御装置。 - 燃焼室に形成される混合気の空燃比を制御する空燃比制御手段を具備し、前記制御対象が前記空燃比制御手段であり、前記制御量が燃焼室に形成される混合気の空燃比であり、同空燃比の推定値である推定空燃比が目標制御量であり、前記制御パラメータ値が前記空燃比制御手段の目標動作状態の設定に用いられるパラメータの値であり、前記制御パラメータ補正値が混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための補正値であり、前記瞬時補正値が混合気の空燃比が推定空燃比に一致するように前記空燃比制御手段の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための補正値であり、
推定空燃比を算出し、混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて前記空燃比制御手段の目標動作状態を設定する請求項1または2に記載の内燃機関の制御装置。 - 燃焼室から排気通路に排出された排気ガスを吸気通路に導入する排気再循環装置を具備し、該排気再循環装置が吸気通路に導入される排気ガスの量を制御する排気ガス再循環量制御手段を有し、前記制御パラメータ値が前記排気ガス再循環量制御手段の目標動作状態の設定に用いられるパラメータの値であり、前記瞬時補正値が混合気の空燃比が推定空燃比に一致するように前記排気ガス再循環量制御手段の目標動作状態の設定に現在用いられている制御パラメータ値を補正するための補正値であり、
推定空燃比を算出し、混合気の空燃比が推定空燃比に一致するように制御パラメータ値を補正するための制御パラメータ補正値を算出し、該算出された制御パラメータ補正値によって補正された制御パラメータ値を用いて前記排気ガス再循環量制御手段の目標動作状態を設定する請求項3に記載の内燃機関の制御装置。 - 前記排気再循環装置によって吸気通路に導入される排気ガスの量である排気ガス再循環量の目標値である目標排気ガス再循環量を設定し、排気ガス再循環量が目標排気ガス再循環量に一致するように前記排気ガス再循環量制御手段の目標動作状態を設定する請求項4に記載の内燃機関の制御装置において、
内燃機関の運転に関する所定のパラメータの値である機関運転パラメータ値に応じて目標とすべき排気ガス再循環量が基準排気ガス再循環量として予め求められており、前記制御パラメータ値が機関運転パラメータ値であり、機関運転パラメータ値を前記制御パラメータ補正値によって補正し、該補正された機関運転パラメータ値に基づいて基準排気ガス再循環量を算出し、該算出された基準排気ガス再循環量を目標排気ガス再循環量に設定する内燃機関の制御装置。 - 燃焼室に燃料を供給する燃料供給手段をさらに具備し、該燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量の目標値である目標燃料供給量を設定し、該目標燃料供給量の燃料が燃焼室に供給されるように前記燃料供給手段の動作状態を制御する請求項5に記載の内燃機関の制御装置において、
前記機関運転パラメータ値が目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量であり、該目標燃料供給量相当量を前記制御パラメータ補正値によって補正し、該補正された目標燃料供給量相当量に基づいて基準排気ガス再循環量を算出し、該算出された基準排気ガス再循環量を目標排気ガス再循環量に設定する内燃機関の制御装置。 - 前記排気再循環装置によって吸気通路に導入される排気ガスの量である排気ガス再循環量の目標値である目標排気ガス再循環量を設定し、排気ガス再循環量が目標排気ガス再循環量に一致するように前記排気ガス再循環量制御手段の動作状態を制御する請求項4に記載の内燃機関の制御装置において、
内燃機関の運転に関する所定のパラメータの値である機関運転パラメータ値に応じて目標とすべき排気ガス再循環量が基準排気ガス再循環量として予め求められており、前記制御パラメータ値が基準排気ガス再循環量であり、機関運転パラメータ値に基づいて基準排気ガス再循環量を算出し、該算出された基準排気ガス再循環量を前記制御パラメータ補正値によって補正し、該補正された基準排気ガス再循環量を目標排気ガス再循環量に設定する内燃機関の制御装置。 - 燃焼室に燃料を供給する燃料供給手段をさらに具備し、該燃料供給手段によって燃焼室に供給される燃料の量である燃料供給量の目標値である目標燃料供給量を設定し、該目標燃料供給量の燃料が燃焼室に供給されるように前記燃料供給手段の動作状態を制御する請求項7に記載の内燃機関の制御装置において、
前記機関運転パラメータ値が目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量であり、該目標燃料供給量相当量に基づいて基準排気ガス再循環量を算出し、該算出された基準排気ガス再循環量を前記制御パラメータ補正値によって補正し、該補正された基準排気ガス再循環量を目標排気ガス再循環量に設定する内燃機関の制御装置。 - 燃焼室に供給される空気の量である供給空気量を検出する供給空気量検出手段をさらに具備する請求項6または8に記載の内燃機関の制御装置において、
目標燃料供給量に相当する燃料供給量である目標燃料供給量相当量を前記制御パラメータ補正値によって補正し、該補正された目標燃料供給量相当量と前記供給空気量検出手段によって検出される供給空気量とに基づいて推定空燃比を算出する内燃機関の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/064072 WO2012176270A1 (ja) | 2011-06-20 | 2011-06-20 | 内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/064072 WO2012176270A1 (ja) | 2011-06-20 | 2011-06-20 | 内燃機関の制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012176270A1 true WO2012176270A1 (ja) | 2012-12-27 |
Family
ID=47422152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/064072 WO2012176270A1 (ja) | 2011-06-20 | 2011-06-20 | 内燃機関の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2012176270A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112031962A (zh) * | 2019-06-03 | 2020-12-04 | 丰田自动车株式会社 | 废气再循环系统的异常检测装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6270641A (ja) * | 1985-09-24 | 1987-04-01 | Japan Electronic Control Syst Co Ltd | 内燃機関の学習制御装置 |
| JP2000073832A (ja) * | 1998-08-28 | 2000-03-07 | Unisia Jecs Corp | 内燃機関のアイドル空気量学習制御装置 |
| JP2001295702A (ja) * | 2000-04-13 | 2001-10-26 | Mitsubishi Motors Corp | 排気ガス再循環装置 |
| JP2005315198A (ja) * | 2004-04-30 | 2005-11-10 | Denso Corp | 内燃機関の排気浄化装置 |
| JP2007255219A (ja) * | 2006-03-20 | 2007-10-04 | Toyota Motor Corp | 内燃機関のegr制御装置 |
| JP2008121447A (ja) * | 2006-11-09 | 2008-05-29 | Nissan Diesel Motor Co Ltd | 燃料噴射制御装置 |
-
2011
- 2011-06-20 WO PCT/JP2011/064072 patent/WO2012176270A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6270641A (ja) * | 1985-09-24 | 1987-04-01 | Japan Electronic Control Syst Co Ltd | 内燃機関の学習制御装置 |
| JP2000073832A (ja) * | 1998-08-28 | 2000-03-07 | Unisia Jecs Corp | 内燃機関のアイドル空気量学習制御装置 |
| JP2001295702A (ja) * | 2000-04-13 | 2001-10-26 | Mitsubishi Motors Corp | 排気ガス再循環装置 |
| JP2005315198A (ja) * | 2004-04-30 | 2005-11-10 | Denso Corp | 内燃機関の排気浄化装置 |
| JP2007255219A (ja) * | 2006-03-20 | 2007-10-04 | Toyota Motor Corp | 内燃機関のegr制御装置 |
| JP2008121447A (ja) * | 2006-11-09 | 2008-05-29 | Nissan Diesel Motor Co Ltd | 燃料噴射制御装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112031962A (zh) * | 2019-06-03 | 2020-12-04 | 丰田自动车株式会社 | 废气再循环系统的异常检测装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7996143B2 (en) | Control apparatus for an internal combustion engine | |
| JP4251073B2 (ja) | 内燃機関の制御装置 | |
| JP5093406B1 (ja) | 内燃機関の制御装置 | |
| JP4929966B2 (ja) | 燃料噴射制御装置 | |
| JP2009108713A (ja) | Egr分配ばらつき検出装置 | |
| JP5136812B1 (ja) | 内燃機関の制御装置 | |
| US20160123264A1 (en) | Control device for internal combustion engine | |
| JP4802792B2 (ja) | 内燃機関のegr制御装置 | |
| US9169792B2 (en) | Engine control system with actuator control | |
| WO2020045486A1 (ja) | 蒸発燃料処理装置 | |
| JP2005320964A (ja) | ディーゼル機関の噴射量制御装置 | |
| JP5664774B2 (ja) | 内燃機関の制御装置 | |
| JP2007247426A (ja) | 内燃機関の空燃比制御装置 | |
| WO2012176270A1 (ja) | 内燃機関の制御装置 | |
| JP5673839B2 (ja) | 内燃機関の制御装置 | |
| US9650985B2 (en) | Fuel injection control apparatus of engine | |
| WO2012086025A1 (ja) | 内燃機関の制御装置 | |
| JP5093408B1 (ja) | 内燃機関の制御装置 | |
| JP6209982B2 (ja) | 内燃機関の制御システム | |
| US10221804B2 (en) | Fuel injection control device | |
| WO2012176269A1 (ja) | 内燃機関の制御装置 | |
| JP6223904B2 (ja) | 燃料噴射量補正方法及びコモンレール式燃料噴射制御装置 | |
| JP5549457B2 (ja) | 内燃機関の制御装置 | |
| US10578047B2 (en) | Controller for internal combustion engine and method for controlling internal combustion engine | |
| JP2015203378A (ja) | 内燃機関のインバランス率学習装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11868267 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 11868267 Country of ref document: EP Kind code of ref document: A1 |