RU2498376C2 - Устройство для стабилизации изображения и устройство для захвата изображения - Google Patents
Устройство для стабилизации изображения и устройство для захвата изображения Download PDFInfo
- Publication number
- RU2498376C2 RU2498376C2 RU2012100254/28A RU2012100254A RU2498376C2 RU 2498376 C2 RU2498376 C2 RU 2498376C2 RU 2012100254/28 A RU2012100254/28 A RU 2012100254/28A RU 2012100254 A RU2012100254 A RU 2012100254A RU 2498376 C2 RU2498376 C2 RU 2498376C2
- Authority
- RU
- Russia
- Prior art keywords
- angular velocity
- rotation
- image
- image stabilization
- circular motion
- Prior art date
Links
Images



























Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
- H04N23/687—Vibration or motion blur correction performed by mechanical compensation by shifting the lens or sensor position
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2217/00—Details of cameras or camera bodies; Accessories therefor
- G03B2217/005—Blur detection
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
Изобретение относится к устройству для стабилизации изображения. Устройство имеет съемочную оптическую систему, главная точка которой перемещается между первым и вторым положениями в направлении оптической оси съемочной системы. Детектор ускорения определяет ускорение, прикладываемое к устройству для стабилизации изображения, и располагается между первым и вторым положениями главной точки. Детектор угловой скорости определяет угловую скорость, прикладываемую к устройству для стабилизации изображения. Блок вычисления угловой скорости поворота определяет составляющую угловой скорости поворота вокруг главной точки съемочной оптической системы на основании значения из детектора угловой скорости. Блок вычисления угловой скорости кругового движения определяет составляющую угловой скорости кругового движения вокруг объекта на основании значений из детектора ускорения и блока вычисления угловой скорости поворота. Блок управления осуществляет управление стабилизацией изображения на основании разности между составляющими угловых скоростей поворота и кругового движения. Технический результат - предотвращение снижения качества изображения путем коррекции размытости изображения из-за дрожания. 4 н. и 13 з.п. ф-лы, 34 ил.
Description
Область техники, к которой относится изобретение
Изобретение относится к устройству для стабилизации изображения, которое предотвращает снижение качества изображения на снимке путем коррекции размытости изображения из-за дрожания, а также к устройству для съемки изображения, включающему в себя устройство для стабилизации изображения.
Предшествующий уровень техники
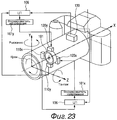
На фиг.23 представлен вид, где показан эскиз устройства для стабилизации изображения, заключенного в обычном фотоаппарате. Дрожание, воздействию которого подвергается фотоаппарат, имеет в общей сложности шесть степеней свободы, причем трем степеням свободы соответствуют повороты, которыми являются движения тангажа, рыскания и крена, а еще трем степеням свободы соответствуют поступательные движения, которые являются движениями в направлениях оси Х, оси Y и оси Z. Устройства для стабилизации изображения, которые в настоящее время выпускаются промышленностью, обычно корректируют размытость изображения из-за поворотов, соответствующих двум степеням свободы и представляющих собой движения тангажа и рыскания.
Движение фотоаппарата оперативно контролируется датчиком 130 угловой скорости. В качестве датчика угловой скорости обычно используется пьезоэлектрический датчик угловой скорости колебаний, который обнаруживает силу Кориолиса, обуславливаемую поворотом. Датчик 130 угловой скорости содержит три детектора, которые осуществляют обнаружение движения тангажа, представляющего собой поворот вокруг оси Z на фиг.23, обнаружение движения рыскания, представляющего собой поворот вокруг оси Y на фиг.23, и обнаружение движения крена, представляющего собой поворот вокруг оси Х (оптической оси) на фиг.23.
Когда надо скорректировать размытость изображения из-за дрожания, выходной сигнал датчика 130 угловой скорости посылается в центральный процессор (ЦП) 106 объектива и вычисляется целевое положение, обуславливаемое приводом, корректирующей линзы 101 для стабилизации изображения. Чтобы привести корректирующую линзу 101 в движение к целевому положению, обуславливаемому приводом, командные сигналы посылаются в формирователи 161x и 161y напряжения и эти формирователи 161x и 161y напряжения отрабатывают командные сигналы, которые посылаются также в блоки 120x и 120y привода приводимой в движение линзы. Положение корректирующей линзы 101 оперативно контролируется детекторами 110х и 110y положения линзы и подается обратно в ЦП 106 объектива. ЦП 106 объектива осуществляет управление позиционированием корректирующей линзы 101 на основании целевого положения, обуславливаемого приводом, и текущего положения корректирующей линзы 101. За счет осуществляемого подобно этому методу привода корректирующей линзы в движение в соответствии с дрожанием можно скорректировать размытость изображения, обуславливаемую дрожанием.
Однако обнаружение движения фотоаппарата из-за дрожания, происходящее в вышеупомянутом устройстве для стабилизации изображения, осуществляется лишь с помощью датчика 130 угловой скорости, и поэтому можно оперативно контролировать угловое движение (поворот), а движение, которое обуславливает параллельное вертикальное или поперечное движение оптической оси (именуемое далее параллельным движением), оперативно контролировать нельзя. Поэтому стабилизацию изображения можно осуществлять только для движений, соответствующих двум степеням свободы и представляющих собой движения тангажа и рыскания.
В данном случае в качестве примера будет описана размытость изображения, обуславливаемая параллельным движением в случае проведения фотосъемки с использованием микрообъектива с фокусным расстоянием 100 мм. Когда с помощью этого объектива проводят съемку пейзажа на бесконечном расстоянии, если выходной сигнал датчика угловой скорости составляет, по существу, 0,8°/с, скорость движения плоскости изображения - исходя из фокусного расстояния - составляет примерно 1,40 мм/с (=100×sin 0,8). Поэтому ширина движения плоскости изображения благодаря угловому движению при съемке с экспозицией 1/15 секунды становится равной 93 мкм (=1,40 мм/15). Далее, если - помимо углового движения - фотоаппарат совершает параллельное движение в вертикальном направлении со скоростью 1,0 мм/с, составляющая скорости этого параллельного движения не влияет на съемку, а размытость изображения из-за параллельного движения не возникает, поскольку в случае съемки на бесконечном расстоянии увеличение β при съемке является, по существу, нулевым.
Вместе с тем, когда осуществляется съемка крупным планом, чтобы сфотографировать цветок или аналогичный объект, увеличение при съемке очень велико и игнорировать влияние увеличения при съемке нельзя. Например, когда увеличение при съемке является увеличением, равным единице (β=1), а скорость движения в вертикальном направлении составляет 1 мм/с, изображение на плоскости изображения тоже движется со скоростью 1 мм/с. Ширина движения в плоскости изображения в момент осуществления съемки со временем экспозиции 1/15 секунды становится равной 67 мкм, и размытость изображения из-за параллельного движения проигнорировать нельзя.
Далее будет описан распространенный в физике и технике способ (модель и математическое выражение), помогающий выразить движение объекта в пространстве. В данном случае о модели, выражающей движение объекта в пространстве, можно сказать, что для облегчения описания будет описан простой объект. В этом случае, если определены три степени свободы объекта, то можно однозначно определить движение и положение этого объекта.
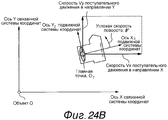
Первой является модель, выражающая параллельное движение и поворот (см. фиг.24А и 24В). В связанной системе координат O-XY в плоскости с осью абсцисс, заданной как ось Х, и перпендикулярной ей осью, заданной как ось Y, положение объекта можно определить, если определены три степени свободы, т.е. заданы положение X(t) в направлении оси X, положение Y(t) в направлении оси Y и угол θ(t) поворота самогό объекта, как показано на фиг.24A. Движение объекта (вектор скорости) можно выразить тремя составляющими - скоростью Vx(t) поступательного движения в направлении оси Х, скоростью Vy(t) поступательного движения базисной точки (начала О2 отсчета), заданной на объекте, в направлении оси Y и угловой скоростью 
(t) поворота вокруг начала координат на объекте, как показано на фиг.24В. Эта модель является наиболее распространенной.
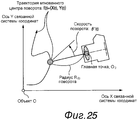
Второй является модель, выражающая мгновенный центр поворота и радиус поворота (см. фиг.25). В связанной системе координат O-XY в плоскости XY объект полагается поворачивающимся при скорости
(t) поворота с радиусом R(t) поворота вокруг некоторой точки f(t)=(X(t), Y(t)), задаваемой как мгновенный центр поворота в некоторый момент времени. Подобно этому движение в пределах плоскости можно выразить траекторией f(t) мгновенного центра поворота и скоростью 
(t) поворота в упомянутый момент времени. Эту модель часто используют при анализе стержневого механизма в механике.
Недавно в выложенной заявке №H07-225405 на патент Японии и выложенной заявке №2004-295027 на патент Японии предложены фотоаппараты, наделенные функцией коррекции параллельного движения. Можно сказать, что в выложенной заявке №H07-225405 на патент Японии движение фотоаппарата в трехмерном пространстве выражается поступательным движением и поворотом на основании значений, измеренных с помощью трех акселерометров и трех датчиков угловой скорости.
Кроме того, в выложенной заявке №2004-295027 на патент Японии при движении фотоаппарата, включающем в себя угловое движение и параллельное движение, как показано на фиг.2 этого патентного документа, вычисляется расстояние n центра поворота от фокальной плоскости. В математическом выражении 1 выложенной заявки №2004-295027 на патент Японии в первой половине вычисляется величина перемещения при угловом движении, которое происходит, когда фокальная плоскость задана как центр поворота, а в последней половине вычисляется величина перемещения при параллельном движении, которое происходит благодаря поступательному движению. Величина перемещения при параллельном движении согласно последней половине представляет собой член коррекции, который учитывают, заменяя поворотом в положении, отстоящем от фокальной плоскости на расстояние n. В способе получения положения n центра поворота, показанном на фиг.3 в выложенной заявке №2004-295027 на патент Японии, используется концепция мгновенного центра, которая часто используется в механике при создании модели, выражающей движение в пространстве. Она основана на идее, заключающейся в том, что движение в пространстве можно выразить последовательностью поворота, т.е. движение в пространстве является поворотом с некоторым радиусом и с некоторой точкой в качестве центра в данный момент времени и является поворотом радиуса со следующей некоторой точкой в качестве центра в следующий момент времени. Поэтому можно сказать, что в выложенной заявке №2004-295027 на патент Японии движение фотоаппарата из-за дрожания моделируется как последовательность поворота, имеющего мгновенный центр.
Однако способ, описанный в выложенной заявке № H07-225405 на патент Японии, создает проблему, заключающуюся в том, что объем вычислений для получения величины размытости в плоскости изображения оказывается громадным, а алгоритм вычисления оказывается очень сложным. Кроме того, не упоминаются вычисления, связанные с коррекцией применительно к размытости в направлении оптической оси (т.е. к расфокусировке). Помимо этого, можно сказать, что в выложенной заявке №2004-295027 на патент Японии движение фотоаппарата моделируется как последовательность поворота, имеющего мгновенный центр поворота, как описано выше, а проблема, создаваемая моделью и математическим выражением, заключается в том, что, как описано в абзаце [0047] самой выложенной заявки № 2004-295027 на патент Японии, в случае F1≈F2 (т.е. равенства сил, прикладываемых к двум акселерометрам) положением n центра поворота становится ∞ и провести вычисления невозможно. Помимо этого, тот факт, что положением n центра поворота становится ∞, означает, что движение из-за угла в направлении тангажа или в направлении рыскания отсутствует и это движение нельзя обнаружить с помощью датчика угловой скорости. Величину коррекции можно вычислить, воспользовавшись выходным сигналом двух датчиков ускорения, но точность при этом мала, а объем вычислений становится громадным. Кроме того, посредством математического выражения, применяемого в этом случае, нельзя провести коррекционный расчет движения в направлении оптической оси.
Помимо этого, при изменении положения главной точки съемочной оптической системы из датчика ускорения (акселерометра) выдается составляющая ошибки коррекции, которая будет описана ниже, но в выложенной заявке № H07-225405 на патент Японии и выложенной заявке №2004-295027 на патент Японии нет никакого технического описания коррекции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение сделано ввиду вышеупомянутых проблем и имеет задачей разработку устройства для стабилизации изображения и устройства для захвата изображения, которые гарантируют точную стабилизацию изображения без отказа управления, уменьшают объем вычислений и могут минимизировать величину ошибки, сопровождающую изменение положения главной точки съемочной оптической системы при любом состоянии, в котором сосуществуют угловое движение и параллельное движение.
Чтобы решить вышеупомянутую задачу, устройство для стабилизации изображения в соответствии с вариантом осуществления настоящего изобретения заимствует конструкцию, характеризующуюся тем, что она имеет съемочную оптическую систему, которая осуществляет съемку объекта, при этом главная точка съемочной оптической системы перемещается во второе положение главной точки из первого положения главной точки в направлении оптической оси съемочной оптической системы и детектор ускорения, который обнаруживает ускорение, прикладываемое к устройству для стабилизации изображения, выдает это ускорение и располагается между первым положением главной точки и вторым положением главной точки в направлении оптической оси съемочной оптической системы.
Другие задачи и признаки настоящего изобретения станут понятными из нижеследующего описания и чертежей.
Краткое описание чертежей
На фиг.1 показана блок-схема, иллюстрирующая основную часть устройства для захвата изображения, которое представляет собой вариант 1 осуществления настоящего изобретения.
На фиг.2 представлен упрощенный чертеж состояния фотоаппарата в проекции на плоскость XY согласно варианту 1 осуществления.
На фиг.3 представлен чертеж, иллюстрирующий положение главной точки и положение акселерометра в варианте 1 осуществления.
На фиг.4А и 4В представлены диаграммы, иллюстрирующие функции коэффициента ошибок выходных сигналов акселерометра в состоянии согласно фиг.3.
На фиг.5 показана диаграмма, иллюстрирующая функцию коэффициента ошибок выходного сигнала акселерометра в положении «бесконечность».
На фиг.6 показана диаграмма, иллюстрирующая положение, в котором коэффициент ошибок выходного сигнала акселерометра в состоянии согласно фиг.3 становится минимальным.
На фиг.7, которая состоит из фиг.7A и 7B, представлены блок-схемы последовательности операций, иллюстрирующие работу согласно варианту 1 осуществления.
На фиг.8А представлен чертеж, иллюстрирующий систему координат, связанную с фотоаппаратом.
На фиг.8В представлен чертеж, иллюстрирующий вид сверху фотоаппарата.
На фиг.8С представлен чертеж, иллюстрирующий вид спереди фотоаппарата.
На фиг.8D представлен чертеж, иллюстрирующий вид сбоку фотоаппарата.
На фиг.9 представлен вид, где иллюстрируется только оптическая система фотоаппарата в трехмерном пространстве.
На фиг.10А и 10В представлены виды, иллюстрирующие полярную систему координат и прямоугольную систему координат с главной точкой A.
На фиг.11 представлена координатная сетка при проецировании на плоскость X9Y9 и плоскость Z9X9.
На фиг.12 представлен чертеж, иллюстрирующий состояние фотоаппарата в проекции на плоскость X9Y9.
На фиг.13 представлен чертеж, иллюстрирующий состояние фотоаппарата в проекции на плоскость Z9X9.
На фиг.14 представлен вид исходного состояния фотоаппарата в исходный момент времени t=0.
На фиг.15 представлен вид исходного состояния фотоаппарата в системе координат О-XYZ.
На фиг.16 представлен базовый пояснительный чертеж полярной системы координат.
На фиг.17 представлен чертеж, иллюстрирующий состояние фотоаппарата в проекции на двумерную систему координат XY.
На фиг.18 представлен чертеж, иллюстрирующий состояние фотоаппарата в проекции на двумерную систему координат ZX.
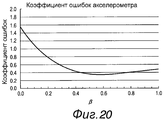
На фиг.19А и 19В представлены диаграммы, иллюстрирующие функции коэффициента ошибок выходных сигналов акселерометра в соответствии с вариантом 2 осуществления.
На фиг.20 представлена диаграмма, иллюстрирующая положение, в котором коэффициент ошибок в соответствии с вариантом 2 осуществления становится минимальным.
На фиг.21 представлена диаграмма, иллюстрирующая положение, в котором коэффициент ошибок в соответствии с модифицированным примером варианта 1 осуществления становится минимальным.
На фиг.22, которая состоит из фиг.22A и 22B, представлены блок-схемы последовательности операций, иллюстрирующие работу согласно варианту 3 осуществления.
На фиг.23 представлен вид, иллюстрирующий устройство для стабилизации изображения фотоаппарата согласно традиционному примеру.
На фиг.24А и 24В представлены чертежи, иллюстрирующие определения положения объекта и скорости объекта в обычной двумерной системе координат.
На фиг.25 представлен чертеж, иллюстрирующий определение обычной траектории мгновенного центра поворота.
Описание вариантов осуществления
Способы осуществления настоящего изобретения являются такими, как представленные в нижеследующих вариантах 1-3 осуществления.
Вариант 1 осуществления
В нижеследующем варианте осуществления движение дрожания фотоаппарата, удерживаемого руками человека, и движение изображения, которое происходит по плоскости изображения в результате движения дрожания фотоаппарата, будут выражены термином «выражение поворота и кругового движения», при этом модель движения выражается путем объединения поворота и кругового движения в оптико-геометрическом выражении.
Данный вариант осуществления представляет собой устройство для стабилизации изображения, которое вычисляет движение фотоаппарата исходя из значений, измеренных акселерометром и датчиком угловой скорости, и выражения поворота и кругового движения, а также вычисляет перемещение изображения. Размытость изображения корректируется за счет осуществления привода части или всего съемочного объектива либо части или всего устройства для захвата изображения на основании вычисленного значения перемещения изображения. В альтернативном варианте настоящее изобретение обеспечивает устройство для стабилизации изображения, которое корректирует размытость изображения путем осуществления обработки изображения применительно к изображению на снимке, проводимой на основании вычисленного значения перемещения изображения, полученного из выражения поворота и кругового движения.
На фиг.1 показана блок-схема, иллюстрирующая основную часть устройства для захвата изображения, которое представляет собой вариант 1 осуществления настоящего изобретения. Части, которые выполняют те же функции, что и в известных технических решениях, обозначены теми же позициями и символами, а избыточные описания будут надлежащим образом опущены.
Устройство для стабилизации изображения в соответствии с вариантом 1 осуществления предусмотрено в тубусе 102 объектива, прикрепляемом к корпусу 201 фотоаппарата и открепляемом от него, и осуществляет коррекцию размытости применительно к направлениям, соответствующим пяти степеням свободы, т.е. направлениям тангажа (поворота вокруг оси Z2), рыскания (поворота вокруг оси Y2), направления оси Y2, направления оси Z2 и направления Х2 (оптической оси). Вместе с тем, на фиг.1 показаны и в нижеследующем описании рассмотрены система стабилизации изображения при повороте по тангажу и система стабилизации изображения в направлении оптической оси, т.е. в направлении оси Х2 (оптической оси), а система стабилизации изображения при повороте по рысканию и движения в направлении оси Z2 является такой же, как система стабилизации изображения для поворота по тангажу и движения в направлении оси Y2.
Датчик 130 угловой скорости представляет собой детектор угловой скорости, который имеет плавающую опору относительно тубуса 102 объектива и обнаруживает угловую скорость движения, которое происходит в корпусе 201 фотоаппарата (тубусе 102 объектива). Датчик 130 угловой скорости в соответствии с вариантом 1 осуществления представляет собой пьезоэлектрический датчик угловой скорости колебаний, который обнаруживает силу Кориолиса, создаваемую за счет поворота. Датчик 130 угловой скорости представляет собой датчик угловой скорости, внутри имеющий оси чувствительности для трехосного поворота, т.е. тангажа, крена и рыскания. Причина, по которой датчик 130 угловой скорости имеет плавающую опору, заключается в том, что надо как можно лучше исключить влияние механических колебаний, сопровождающих работу механизма фотоаппарата. Датчик 130 угловой скорости выдает сигнал угловой скорости, соответствующий обнаруженной угловой скорости, в фильтр 160c.
Акселерометр 121 представляет собой детектор ускорения, который обнаруживает ускорение движения, которое сообщается корпусу 201 фотоаппарата (тубусу 102 объектива). Акселерометр 121 в соответствии с вариантом 1 осуществления представляет собой трехосный акселерометр, имеющий три оси чувствительности по отношению к трем направлениям - оси X, оси Y и оси Z, и имеющий плавающую опору на тубус 102 объектива. Акселерометр 121 имеет плавающую опору по той же причине, что и в случае датчика 130 угловой скорости. Кроме того, акселерометр 121 является трехосным датчиком ускорения (датчиком ускорения, использующим вес) в данном варианте осуществления и частотные характеристики по двум осям являются одинаково высокими, а частотная характеристика по оставшейся оси является низкой. Следовательно, чтобы обнаружить ускорения в направлении оси Y2 и направлении оси Z2, перпендикулярных оптической оси, используют две оси с высокой чувствительностью, а одну ось с низкой характеристикой выравнивают с осью Х2 (направлением оптической оси). Это нужно для точного обнаружения ускорений в направлении оси Y2 и направлении оси Z2, которые оказывают большое влияние на коррекцию размытости изображения.
Выходной сигнал акселерометра 121 подвергается аналого-цифровому преобразованию после прохождения через фильтр нижних частот (ФНЧ), такой как фильтр 160a или аналогичный ему фильтр, и вводится в блок 107 вычисления коррекции объектива со стабилизацией изображения (СИ) в ЦП 106 объектива. Акселерометр 121 может быть установлен на рамку подвижного зеркала, которая движется в направлении оптической оси во время трансфокации или аналогичной операции, рамку, которая удерживает другую оптическую систему, или блок в оптической системе, такой как упор, но в таком случае необходимо гарантировать надлежащее положение акселерометра 121 относительно главной точки после обнаружения трансфокации.
Кроме того, датчик 130 угловой скорости является датчиком гироскопического типа, как описано выше, и совершает колебания на частоте 26 кГц. Соответственно, если бы эти датчики устанавливались на одной и той же подложке, то акселерометр 121, вероятно, улавливал бы колебательный шум, и поэтому акселерометр 121 и датчик 130 угловой скорости устанавливают на отдельных подложках.
Блок 120 привода линзы со стабилизацией изображения представляет собой блок привода (исполнительный механизм), который генерирует движущую силу, чтобы привести в движение корректирующую линзу 101 в пределах плоскости изображения (в пределах плоскости Y2Z2), перпендикулярной оптической оси I, для коррекции размытости изображения. Блок 120 привода линзы со стабилизацией изображения генерирует движущую силу в направлении оси Y2 и приводит в движение корректирующую линзу 101, когда не показанная катушка переводится в возбужденное состояние током возбуждения, который выдается формирователем 161 напряжения.
Детектор 110 положения линзы представляет собой оптический детектор положения, который обнаруживает положение корректирующей линзы 101 в плоскости, перпендикулярной оптической оси I. Детектор 110 положения линзы осуществляет оперативный контроль текущего положения корректирующей линзы 101 и возвращает информацию, касающуюся текущего положения корректирующей линзы 101, в контроллер 108 стабилизации изображения через аналого-цифровой преобразователь (АЦП).
ЦП 106 объектива представляет собой центральный процессор, который осуществляет различные варианты управления на стороне тубуса 102 объектива. ЦП 106 объектива вычисляет фокусное расстояние на основании импульсного сигнала, выдаваемого детектором 163 фокусного расстояния, и вычисляет расстояние до объекта на основании импульсного сигнала, выдаваемого детектором 164 расстояния до объекта. Кроме того, в ЦП 106 объектива предусмотрены блок 107 вычисления коррекции объектива со стабилизацией изображения, контроллер 108 стабилизации изображения и контроллер 401 линзы автоматической фокусировки. ЦП 106 объектива может осуществлять связь с ЦП 109 корпуса через сочленение 190 объектива, предусмотренное между тубусом 102 объектива и корпусом 201 фотоаппарата. Команда начала коррекции размытости изображения посылается из ЦП 109 корпуса синхронно с полунажатием включения (ВКЛ) спускового переключателя 191 затвора, а команда останова коррекции размытости изображения посылается в ЦП 106 синхронно с полунажатием выключения (ВЫКЛ).
Кроме того, ЦП 106 объектива осуществляет оперативный контроль состояния переключателя 103 коррекции размытости, предусмотренного в тубусе 102 объектива. Если переключатель 103 коррекции размытости находится в состоянии ВКЛ, то ЦП 106 объектива осуществляет управление коррекцией размытости изображения, а если переключатель 103 коррекции размытости находится в состоянии ВЫКЛ, то ЦП 106 объектива игнорирует команду начала коррекции размытости изображения из ЦП 109 корпуса и не осуществляет коррекцию размытости.
Блок 107 вычисления коррекции объектива со стабилизацией изображения представляет собой часть конструкции, которая преобразует выходные сигналы фильтров 160a и 160c в информацию о целевой скорости для приведения тубуса 102 объектива в движение к целевому положению. Контроллер 108 стабилизации изображения, фильтры 160a и 160c, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) 162, детектор 163 фокусного расстояния и детектор 164 расстояния до объекта соединены с блоком 107 вычисления коррекции объектива со стабилизацией изображения. Контроллер 401 линзы автоматической фокусировки имеет блок 402 вычисления скорости движения в направлении оптической оси, который осуществляет вычисление для проведения коррекции движения в направлении оптической оси путем использования значения выходного сигнала акселерометра из блока 107 вычисления коррекции объектива со стабилизацией изображения, а также выдает результат вычисления в формирователь 172 напряжения линзы автоматической фокусировки.
Линзу 140 автоматической фокусировки можно приводить в движение в направлении оптической оси посредством блока 141 привода линзы автоматической фокусировки с помощью ультразвукового электродвигателя или шагового электродвигателя в качестве источника движущей силы. Формирователь 172 напряжения линзы автоматической фокусировки генерирует напряжение для осуществления управления возбуждением блока 141 привода линзы автоматической фокусировки.
Блок 107 вычисления коррекции объектива со стабилизацией изображения улавливает выходные сигналы (аналоговые сигналы), выдаваемые из датчика 130 угловой скорости и акселерометра 121 через фильтры 160a и 160c путем квантования сигналов посредством аналого-цифрового преобразования. На основании информации о фокусном расстоянии, получаемой из детектора 163 фокусного расстояния, информации о расстоянии до объекта, получаемой из детектора 164 расстояния до объекта, и информации, свойственной исключительно объективу, которая записана в ЭСППЗУ 162, блок 107 вычисления коррекции объектива со стабилизацией изображения преобразует упомянутые сигналы в целевую скорость привода корректирующей линзы 101. Способ преобразования (способ вычисления) к целевому положению привода, воплощаемый блоком 107 вычисления коррекции объектива со стабилизацией изображения, будет подробно описан ниже. Сигнал целевой скорости, который представляет собой информацию о целевой скорости привода, вычисляемой блоком 107 вычисления коррекции объектива со стабилизацией изображения, выдается в контроллер 108 стабилизации изображения.
Контроллер 108 стабилизации изображения представляет собой часть конструкции, которая управляет блоком 120 привода линзы со стабилизацией изображения через формирователь 161 напряжения и осуществляет следящее управление таким образом, что корректирующая линза 101 приводится в движение в соответствии с информацией о целевой скорости привода. Контроллер 108 стабилизации изображения преобразует сигнал обнаружения положения (аналоговый сигнал), выдаваемый детектором 110 положения линзы, в цифровой сигнал. Одна часть входного сигнала, поступающего в контроллер 108 стабилизации изображения, рассматривается как сигнал целевой скорости, преобразованный в целевую скорость привода корректирующей линзы 101, который является выходным сигналом блока 107 вычисления коррекции объектива со стабилизацией изображения, а другая часть входного сигнала рассматривается как информация о положении корректирующей линзы 101, которая получается детектором 110 положения линзы.
В качестве управления в контроллере 108 стабилизации изображения осуществляется управление скоростью путем использования расхождения между целевой скоростью привода корректирующей линзы 101 и информацией о фактической скорости. Контроллер 108 стабилизации изображения вычисляет сигнал возбуждения на основании целевой скорости привода, информации о скорости корректирующей линзы 101 и т.п. и выдает цифровой сигнал возбуждения в формирователь 161 напряжения.
В альтернативном варианте, в качестве управления в контроллере 108 стабилизации изображения можно воспользоваться известным пропорционально-интегрально-дифференциальным (ПИД) управлением. ПИД-управление осуществляется путем использования информации о целевом положении и информации о текущем положении линзы для корректирующей линзы 101. Контроллер 108 стабилизации изображения вычисляет сигнал возбуждения на основании информации о целевом положении, информации о текущем положении корректирующей линзы 101 и т.п. и выдает цифровой сигнал возбуждения в формирователь 161 напряжения.
Фильтры 160a и 160c представляют собой фильтры, которые удаляют заданные частотные составляющие из выходных сигналов датчика 130 угловой скорости и акселерометра 121 и отсекают шумовую составляющую и составляющую постоянного тока, присутствующие в полосе высоких частот. Фильтры 160a и 160c осуществляют аналого-цифровое преобразование сигналов угловой скорости после удаления заранее определенных частотных составляющих, а потом выдают сигналы угловой скорости в блок 107 вычисления коррекции объектива со стабилизацией изображения.
Формирователь 161 напряжения представляет собой формирователь, который подает электропитание на блок 120 привода стабилизации изображения в соответствии со входным сигналом возбуждения (напряжением возбуждения). Формирователь 161 напряжения осуществляет переключение сигнала возбуждения и прикладывает напряжение к блоку 120 привода линзы со стабилизацией изображения, чтобы осуществить возбуждение блока 120 привода линзы со стабилизацией изображения.
ЭСППЗУ 162 представляет собой энергонезависимое запоминающее устройство, которое хранит данные объектива, представляющие собой разного рода особую информацию, касающуюся тубуса 102 объектива, а также коэффициентов для преобразования импульсных сигналов, выдаваемых детектором 164 расстояния до объекта, в физические величины.
Детектор 163 фокусного расстояния представляет собой кодер трансфокации, который обнаруживает фокусное расстояние. Детектор 163 фокусного расстояния выдает импульсный сигнал, соответствующий значению фокусного расстояния, в блок 107 вычисления коррекции объектива со стабилизацией изображения. Детектор 164 расстояния до объекта представляет собой кодер фокусировки, предназначенный для обнаружения расстояния до объекта. Детектор 164 расстояния до объекта обнаруживает положение съемочной оптической системы 105 (линзы 140 автоматической фокусировки) и выдает импульсный сигнал, соответствующий этому положению, в блок 107 вычисления коррекции объектива со стабилизацией изображения.
Из результатов обнаружения детектором 163 фокусного расстояния и детектором 164 расстояния до объекта вычисляется положение главной точки A съемочной системы координат 105, как будет описано ниже. В альтернативном варианте считывается информация о положении главной точки A съемочной системы координат 105, хранимая в ЭСППЗУ 162, и осуществляется управление, которое будет описано ниже.
ЦП 109 корпуса представляет собой центральный процессор, который осуществляет различные управления всей системой фотоаппарата. ЦП 109 корпуса передает команду начала коррекции размытости в ЦП 106 объектива на основании операции ВКЛ спускового переключателя 191 затвора. В альтернативном варианте ЦП 109 корпуса передает команду останова коррекции размытости в ЦП 106 объектива на основании операции ВЫКЛ спускового переключателя 191 затвора. В альтернативном варианте осуществляется обработка различных типов, отличающаяся от вышеуказанной. Информация о спусковом переключателе 191 затвора вводится в ЦП 109 корпуса, и спусковой переключатель 191 затвора может обнаружить операцию полунажатия или полного нажатия не показанной спусковой кнопки затвора. Спусковой переключатель 191 затвора представляет собой переключатель, который обнаруживает операцию полунажатия не показанной спусковой кнопки затвора, начинает последовательность операций подготовки к съемке, обнаруживает операцию полного нажатия спусковой кнопки затвора и начинает операцию съемки.
Далее будет подробно описана начинка блока 107 вычисления коррекции стабилизации.
Блок 301 вычисления угловой скорости поворота вычисляет угловую скорость 
acxy поворота на основании значения выходного сигнала датчика угловой скорости. Значение выходного сигнала датчика угловой скорости и угловая скорость поворота обычно связаны линейной зависимостью, и поэтому угловую скорость поворота можно получить путем умножения значения выходного сигнала датчика угловой скорости на некоторый коэффициент.
Фильтр 303 верхних частот представляет собой фильтр, который передает частотную составляющую, необходимую для коррекции размытости. Блок 304 вычисления угловой скорости кругового движения может получать угловое ускорение 
axy кругового движения путем деления составляющей jraxy 
axy ускорения кругового движения, которая представляет собой значение входного сигнала из фильтра 303 верхних частот, на фокусное расстояние raxy со стороны объекта. Кроме того, проводя интегрирование по времени углового ускорения кругового движения, получают угловую скорость 
axy кругового движения, требующуюся для управления.
Блок 305 вычисления величины стабилизации изображения по разности поворота и кругового движения вычисляет скорость движения изображения в направлении Y2 поверхности для захвата изображения устройства 203 для захвата изображения путем подстановки увеличения β считываемого изображения, фактического значения f фокусного расстояния, а также угловой скорости caxy поворота и угловой скорости axy кругового движения, которые вычисляются в реальном масштабе времени, в следующее выражение (15), которое будет описано ниже.

Полученная скорость движения изображения становится целевой скоростью привода. Скорость движения изображения в направлении Z2 поверхности для захвата изображения можно аналогичным образом получить из выражения (16), которое будет описано ниже, а здесь это описание будет опущено.
Блок 306 выбора теоретической формулы выбирает либо формулу коррекции движения по разности поворота и кругового движения, предусматривающую использование разности между угловой скоростью поворота и угловой скоростью кругового движения, либо формулу коррекции движения поворота, предусматривающую использование только угловой скорости поворота, в качестве формулы, используемой для вычисления коррекции в соответствии с отношением угловой скорости кругового движения к угловой скорости поворота.
Смысл и способ применения выражения (15) формулы размытости с использованием поворота и кругового движения
В варианте 1 осуществления составляющая дрожания фотоаппарата (движения, обуславливающего угол тангажа, и параллельного движения в направлении оси Y2) в плоскости XY выражается формулой поворота и кругового движения, а скорость движения изображения в направлении Y2 на поверхности для захвата изображения (движения изображения в направлении поверхности для захвата изображения) получается с помощью выражения (15), которое представляет собой приближенное выражение формулы движения поворота и кругового движения. В описании настоящего изобретения «вектор R» обозначен как «R».

где  представляет вектор скорости движения изображения на поверхности для захвата изображения; β представляет увеличение изображения (безразмерную величину) во время коррекции размытости изображения для съемочного объектива этого фотоаппарата; f представляет фактическое фокусное расстояние (мм) во время коррекции размытости изображения для съемочного объектива этого фотоаппарата; (1+β)f представляет фокусное расстояние (мм) со стороны изображения;
представляет вектор скорости движения изображения на поверхности для захвата изображения; β представляет увеличение изображения (безразмерную величину) во время коррекции размытости изображения для съемочного объектива этого фотоаппарата; f представляет фактическое фокусное расстояние (мм) во время коррекции размытости изображения для съемочного объектива этого фотоаппарата; (1+β)f представляет фокусное расстояние (мм) со стороны изображения; caxy представляет производную по времени угла θcaxy поворота с главной точкой A в качестве центра, т.е. угловую скорость поворота (рад/сек); axy представляет производную по времени от угла θaxy кругового движения с началом О координат в качестве центра, т.е. угловую скорость кругового движения (рад/сек); ej(π/2) - это член, демонстрирующий, что вектор скорости движения изображения указывает направление, повернутое на 90 градусов (ввиду наличия (π/2) в показателе степени) от оси X2 (оптической оси) в полярной системе координат.
Подробная процедура вывода являющейся выражением (15) приближенной теоретической формулы скорости  движения изображения в подвижной системе координат O2-X2Y2 в плоскости XY будет описана ниже, а здесь со ссылками на фиг.2 будет описан смысл этой формулы.
движения изображения в подвижной системе координат O2-X2Y2 в плоскости XY будет описана ниже, а здесь со ссылками на фиг.2 будет описан смысл этой формулы.
На фиг.2 представлен схематический чертеж состояния фотоаппарата в проекции на плоскость XY согласно варианту 1 осуществления. Здесь изображены внешние очертания и объектив фотоаппарата. В фотоаппарате изображены главная точка Axy оптической системы, акселерометр Bxy, центр Cxy и устройство 203 для захвата изображения. Начало O4 координат системы координат O4-X4Y4 связано с главной точкой Axy оптической системы. Когда главная точка Axy перемещается, ось X4 сохраняет параллельное состояние по отношению к оси X, а ось Y4 сохраняет параллельное состояние по отношению к оси Y. Начало O2 координат системы координат O2-X2Y2 связано с главной точкой Axy и перемещается вместе с фотоаппаратом как единое целое. В этом случае ось Х2 всегда совпадает с оптической осью этого фотоаппарата.
Угол, описываемый вокруг начала O2 координат от оси X4 до оси Х2, задан в качестве угла θcaxy поворота. Угол, описываемый вокруг начала координат O от оси X до скаляра raxy, задан в качестве угла θaxy кругового движения. Скаляр raxy≈(l+β)f/β представляет фокусное расстояние со стороны объекта. β представляет собой увеличение при формировании изображения. Вектор 
xy ускорения силы тяжести в главной точке Axy имеет угол θgxy, описываемый вокруг главной точки Axy от оси X4 до вектора xy, получаемый путем обычного поворота (против часовой стрелки). θgxy - величина постоянная.
Термин «приближенное выражение» означает, что скорость движения изображения в направлении Y2 в плоскости для захвата изображения можно выразить так: (фокусное расстояние со стороны изображения)×(значение, полученное путем вычитания угловой скорости кругового движения из угловой скорости поворота). Точной формулой без приближения является выражение (12). Когда осуществляют коррекцию размытости изображения с большей точностью, можно использовать выражение (12) точной формулы. Здесь raxy≈(l+β)f/β представляет фокусное расстояние со стороны объектива.

Аналогично случаю плоскости XY, составляющие дрожания фотоаппарата на плоскости ZX и параллельного движения в направлении Z2 выражены посредством формулы поворота и кругового движения, а скорость движения изображения в направлении Z2 (движения изображения в поперечном направлении плоскости для захвата изображения) в плоскости поверхности устройства для захвата изображения получается с помощью приближенного выражения (16). Оно означает то же, что и выражение (15), и поэтому соответствующее описание здесь будет опущено.
Далее будет описана составляющая, включенная в выходной сигнал акселерометра 121. Процедура вывода формулы будет описана ниже, а здесь будут описаны члены, необходимые для стабилизации изображения. Выходной сигнал  акселерометра в направлении оси Y2, который используется для получения угловой скорости
акселерометра в направлении оси Y2, который используется для получения угловой скорости 
аху кругового движения, представлен выражением (27).
(третий член: ускорение кругового движения)
(четвертый член: сила Кориолиса)
(пятый член: центростремительная сила поворота)
(шестой член: ускорение поворота)
(седьмой член: составляющая ускорения силы тяжести)
(27)
Третий член jraxy 
axy в выражении (27) - это составляющая, требующаяся для получения угловой скорости 
axy кругового движения, которую желательно получить в варианте 1 осуществления, и если третий член выводят с помощью известного raxy и интегрируют, то получается угловая скорость axy кругового движения. Четвертый член, пятый член, шестой член и седьмой член являются членами, не обязательными для вычисления, и если они не исключены, то они становятся составляющими ошибки во время получения угловой скорости axy кругового движения. Четвертый член j2 
axy axy представляет силу Кориолиса, и если движение в направлении оптической оси фотоаппарата мало, то скорость в направлении оптической оси axy=0, а четвертый член является членом, которым можно пренебречь. Выражение (27) также будет описано ниже.
Пятый член, шестой член и седьмой член являются составляющими ошибки, которые включены в выходной сигнал  акселерометра, поскольку акселерометр 121 нельзя расположить в идеальном положении А главной точки и он расположен в положении В. Пятый член
акселерометра, поскольку акселерометр 121 нельзя расположить в идеальном положении А главной точки и он расположен в положении В. Пятый член  - это центростремительная сила, которая генерируется благодаря работе акселерометра 121 в окрестности главной точки A. rbaxy и θbaxy представляют координаты положения В, в котором установлен акселерометр 121, и они известны.
- это центростремительная сила, которая генерируется благодаря работе акселерометра 121 в окрестности главной точки A. rbaxy и θbaxy представляют координаты положения В, в котором установлен акселерометр 121, и они известны. caxy представляет угловую скорость поворота, являющуюся значением, которое можно измерить с помощью датчика 130 угловой скорости, установленного на фотоаппарат. Поэтому значение пятого члена можно вычислить.
Шестой член  - это составляющая ускорения, когда акселерометр 121 поворачивается вокруг главной точки A, а rbaxy и θbaxy - это координаты положения В, в котором установлен акселерометр 121, и они известны.
- это составляющая ускорения, когда акселерометр 121 поворачивается вокруг главной точки A, а rbaxy и θbaxy - это координаты положения В, в котором установлен акселерометр 121, и они известны. 
саху можно вычислить путем дифференцирования значения из датчика 130 угловой скорости, установленного на фотоаппарат. Поэтому значение шестого члена можно вычислить.
Седьмой член  - это влияние ускорения силы тяжести, и его можно считать константой в этом приближенном выражении, вследствие чего его можно исключить посредством схемы обработки фильтрацией.
- это влияние ускорения силы тяжести, и его можно считать константой в этом приближенном выражении, вследствие чего его можно исключить посредством схемы обработки фильтрацией.
Выходной сигнал  акселерометра в направлении оси X2, которое является оптической осью для использования при коррекции движения в направлении оптической оси, представлен выражением (26).
акселерометра в направлении оси X2, которое является оптической осью для использования при коррекции движения в направлении оптической оси, представлен выражением (26).
(первый член: движение в направлении оптической оси)
(второй член: центростремительная сила кругового движения)
(пятый член: центростремительная сила поворота)
(шестой член: ускорение поворота)
(седьмой член: составляющая ускорения силы тяжести)
(26)
В выражении (26) для коррекции движения в направлении оптической оси требуется лишь первый член 
axy (ускорение в направлении оптической оси). Второй член, пятый член, шестой член и седьмой член являются составляющими, не требующимися для коррекции движения в направлении оптической оси, и если они не исключены, то они становятся составляющими ошибки во время получения ускорения в направлении оси Х2, которая является оптической осью. Второй член, пятый член, шестой член и седьмой член можно исключить способом, аналогичным применявшемуся в случае выражения (27). Выражение (26) также будет описано ниже.
Как описано выше, составляющие ошибки, включенные в выходной сигнал акселерометра 121, можно исключить, но если осуществляется вычисление, связанное с коррекцией, то начало операции коррекции размытости задерживается на время этого вычисления, а точную коррекцию размытости провести нельзя.
Таким образом, на основании концепции, описываемой ниже, акселерометр 121 помещают в тубус 102 объектива, и тем самым можно минимизировать составляющую ошибки, включенную в выходной сигнал акселерометра 121. Поэтому не требуется время на вычисление, связанное с коррекцией, вследствие чего коррекцию размытости можно сделать точной.
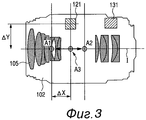
На фиг.3 представлено сечение тубуса 102 объектива для описания компоновки съемочной оптической системы 105, акселерометра 121 и датчика 131 угловой скорости. На фиг.3 главная точка съемочной оптической системы 105 находится на оптической оси I, и в соответствии с увеличением для формирования изображения, заданным пользователем, главная точка съемочной оптической системы перемещается по оптической оси I в пределах диапазона от положения А1 главной точки во время съемки с увеличением, равным единице (как во время съемки с близкого расстояния), до положения А2 главной точки во время съемки на бесконечном расстоянии (β=0,0). Более конкретно, главная точка перемещается по оптической оси I в пределах диапазона между точкой (первой точкой), в которой увеличение β при съемке становится равным 1,0, и второй точкой, которая является положением главной точки, в котором увеличение β при съемке становится равным 0,0 в съемочной оптической системе. Датчик 131 угловой скорости находится в произвольном положении в тубусе 102 объектива, а акселерометр 121 находится в некотором положении в направлении оптической оси I между положением А1 главной точки (первой точкой) во время съемки при увеличении, равном единице, и положением А2 главной точки (второй точкой) во время съемки на бесконечном расстоянии. Например, акселерометр 121 находится в положении в направлении оптической оси, где увеличение β при съемке становится равным 0,5.
Положение акселерометра 121 в направлении оптической оси I задается как положение А3 главной точки, расстояние в направлении оптической оси I от положения А1 главной точки во время съемки с увеличением, равным единице, задается как ΔX, а расстояние в направлении, перпендикулярном оптической оси I, задается как ΔY. Поэтому в выражении (27) в случае съемки с увеличением, равным единице, удовлетворяется равенство rbaxy=ΔY/sinθbaxy. А именно, удовлетворяется равенство tgθbaxy=ΔY/ΔX.
Здесь сумма пятого члена и шестого члена, которые являются необязательными членами в выражении (27), выражается как функция g(θba) ошибки положения акселерометра следующим образом:
Как описано выше, четвертым членом в выражении (27) можно пренебречь, а седьмой член тоже можно исключить с помощью схемы обработки фильтрацией. Следовательно, выходные сигналы акселерометра 121 после обработки фильтрацией представляют собой третий член, пятый член и шестой член, и поэтому когда коэффициент функции g(θba) ошибки положения акселерометра, включенной в выходной сигнал акселерометра 121 и представленной выражением (30), задан как функция f(θba) коэффициента ошибок, эту функцию f(θba) коэффициента ошибок можно выразить следующим образом:

В нижеследующем тексте предполагается, что акселерометр 121 находится в положении, где увеличение при съемке β=0,5. В содержимом выражения (31) raxy - это функция увеличения β при съемке, а в результате тщательного исследования, проведенного заявителем данной заявки, известно, что 
axy связано линейной зависимостью с увеличением β при формировании изображения. Поэтому выражение (31) можно представить следующим образом:

Кстати, известно, что даже если положение при съемке и увеличение для формирования изображения изменяются, в результате исследования, проведенного заявителем данной заявки, известно, что 
caxy и caxy, по существу, постоянны. Поэтому функция f(θba), представленная в выражении (32), имеет следующий вид при подстановке значений caxy и caxy:

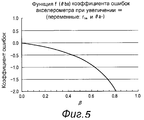
Фиг.4А иллюстрирует коэффициент ошибок при каждом увеличении формирования изображения, который получается путем получения фокусного расстояния f съемочной оптической системы 105 и увеличения формирования изображения в этот момент в выражении (33). Фиг.4A иллюстрирует ошибку во время размещения акселерометра 121, когда увеличение формирования изображения составляет β=0,5, как описано выше.
Следовательно, коэффициент ошибок определяется каждый раз от момента, когда акселерометр 121 оказывается в положении А1 главной точки во время съемки с увеличением, равным единице, посредством съемочной оптической системы 105, до момента прихода в положение А2 главной точки во время съемки на бесконечном расстоянии. Фиг.4B и фиг.5 иллюстрируют коэффициенты ошибок во время нахождения акселерометра 121 в положении съемки с увеличением, равным единице, и в положении «бесконечность». Например, фиг.6 показывает, как результат суммирования произведений значений в случаях соответствующих увеличений при формировании изображения для коэффициентов ошибок, полученных так, как показано на фиг.4А, 4В и 5, изменяется, когда акселерометр 121 располагается согласно соответствующим увеличениям при съемке. Как показано на фиг.6, обнаруживается, что когда акселерометр 121 находится в окрестности положения, соответствующего увеличению формирования изображения, составляющему β=0,7, коэффициент ошибок становится наименьшим по сравнению со случаем, в котором акселерометр 121 находится в положениях, соответствующих другим увеличениям при съемке. Следовательно, составляющую ошибки, включенную в выходной сигнал акселерометра 121, можно минимизировать, располагая акселерометр 121 в окрестности положения, соответствующего увеличению при формировании изображения, составляющему β=0,7, обеспечиваемому съемочной оптической системой 105, и поэтому не требуется время на вычисление, связанное с коррекцией выходного сигнала акселерометра 121.
Описание блок-схемы последовательности операций
На фиг.7A и 7B представлены блок-схемы последовательности операций, иллюстрирующие процесс работы, связанной с коррекцией объектива со стабилизацией изображения, устройства для стабилизации изображения в варианте 1 осуществления. Далее со ссылками на фиг.7A и 7B будет описана работа, связанная с вычислением величины коррекции корректирующей линзы 101.
На этапе (в дальнейшем этапы обозначаются символом S) 1010, когда переключатель 103 коррекции размытости находится в состоянии ВКЛ, из корпуса 201 фотоаппарата выдается команда начала коррекции посредством полунажатия ВКЛ спускового переключателя 191 затвора. Приемом этой команды начала коррекции и начинается операция коррекции размытости.
На этапе S1020 определяют, выдается ли команда останова коррекции размытости из корпуса 201 фотоаппарата, а когда она выдается, процесс переходит к этапу S1400, и операция коррекции размытости заканчивается. Когда эта команда не выдается, процесс переходит к этапу S1030, чтобы продолжить операцию коррекции размытости. Соответственно, операция коррекции размытости продолжается до тех пор, пока из корпуса 201 фотоаппарата не выдается команда останова коррекции размытости.
На этапе S1030 считывают количественное значение, полученное из детектора 163 фокусного расстояния. Количественное значение, полученное из детектора 163 фокусного расстояния, используют для вычисления увеличения β формирования изображения. На этапе S1040 считывают количественное значение (абсолютное значение расстояния), полученное из детектора 164 расстояния до объекта. На этапе S1050 вычисляют увеличение β формирования изображения на основании количественного значения, полученного из детектора 163 фокусного расстояния, и количественного значения, полученного из детектора 164 расстояния до объекта. Вычисление увеличения β формирования изображения проводят по особой формуле в зависимости от конфигурации оптической системы, и оно вычисляется на основании формулы вычисления увеличения формирования изображения. В частности, получение увеличения β формирования изображения не обязательно должно проводиться по этой формуле, и можно получать увеличение формирования изображения из таблицы применительно к закодированному положению, соответствующему фокусному расстоянию и абсолютному значению расстояния.
На этапе S1060 считывают выходные сигналы датчика 130 угловой скорости и акселерометра 121. На этапе S1070 вычисляют угловую скорость 
саху поворота на основании значения выходного сигнала датчика угловой скорости с этапа S1310. Значения выходного сигнала датчика угловой скорости и угловая скорость поворота обычно связаны линейной зависимостью, и поэтому угловую скорость поворота можно получить путем умножения на коэффициент.
На этапе S1410 определяют, полностью ли нажат спусковой переключатель 191 затвора, находясь в состоянии ВКЛ, то есть полностью ли нажата не показанная спусковая кнопка затвора. Если ответ ДА, то есть если идет время экспозиции фотоаппарата, процесс переходит к этапу S1420, а если ответ НЕТ, то есть наступает состояние перед экспозицией, процесс переходит к этапу S1090. На этапе S1090 осуществляют обработку фильтрацией для значения  выходного сигнала акселерометра с этапа S1080 и исключают седьмой член выражения (27). Значение после этого исключения задают как
выходного сигнала акселерометра с этапа S1080 и исключают седьмой член выражения (27). Значение после этого исключения задают как  .
.
На этапе S1100 значение  с этапа S1090 делят на фокусное расстояние raxy со стороны объекта и тем самым получают угловое ускорение
с этапа S1090 делят на фокусное расстояние raxy со стороны объекта и тем самым получают угловое ускорение 
axy кругового движения. Далее, интегрируя по времени угловое ускорение кругового движения, получают угловую скорость 
axy кругового движения, необходимую для управления. На следующем этапе S1104 вычисляют отношение угловой скорости кругового движения к угловой скорости поворота. На следующем этапе S1106 сохраняют значение отношения угловых скоростей кругового движения и поворота, вычисленное на этапе S1104. Когда остается предыдущее значение, новое записывают поверх предыдущего значения и сохраняют, а процесс переходит к этапу S1110.
На этапе S1420 считывают отношение угловых скоростей кругового движения и поворота, сохраненное на уже проведенном этапе S1106, и процесс переходит к этапу S1110. На этапе S1110 определяют, больше ли отношение угловой скорости caxy поворота с этапа S1070 и угловой скорости axy кругового движения с этапа S1100 чем 0,1 (то есть больше ли оно, чем заранее определенное значение). Когда это отношение больше чем 0,1, процесс переходит к этапу S1120. Когда это отношение составляет 0,1 или менее (равно упомянутому заранее определенному значению или меньше него), процесс переходит к этапу S1130.
При вычислении коррекции движения по разности поворота и кругового движения согласно этапу S1120 вычисляют скорость движения изображения в направлении Y2 поверхности для захвата изображения путем подстановки считываемого увеличения β формирования изображения, фактического значения f фокусного расстояния, значения caxy угловой скорости поворота, вычисленного в реальном масштабе времени, и оценочного значения угловой скорости axy кругового движения, полученного путем умножения отношения угловых скоростей кругового движения и поворота, сохраненного на этапе S1106, на значение caxy угловой скорости поворота, вычисленное в реальном масштабе времени, в выражение (15).

Полученная скорость движения изображения становится целевой скоростью при коррекции. Скорость движения изображения в направлении Z2 поверхности для захвата изображения получают аналогичным образом из выражения (16), но описание его здесь опущено. Во время вычисления коррекции движения поворота согласно этапу S1130 угловую скорость axy кругового движения, которая подставлена в выражение (15), задают как постоянно нулевую без проведения вычисления исходя из выходного сигнала датчика. Поэтому выражение (15) упрощается и записывается в следующем виде.
Если в выражение (15) подставляют полученное в реальном масштабе времени значение caxy угловой скорости поворота с этапа S1070, то получают в реальном масштабе времени скорость движения изображения в направлении Y2.
На этапе S1140 осуществляют связанное со следящим управлением вычисление для привода корректирующей линзы 101 с учетом чувствительности корректирующей линзы 101 на основании скорости движения изображения, полученной посредством вычисления коррекции движения по разности поворота и кругового движения (S1120) или вычисления коррекции движения поворота (S1130). При этом одновременно осуществляется оперативный контроль выходного сигнала текущего положения корректирующей линзы 101.
На этапе S1150 происходит выдача результата вычисления в формирователь 161 напряжения, который способствует приведению корректирующей линзы 101 в движение на основании результата вычисления, связанного со следящим управлением и полученного на этапе S1140. После выдачи результата вычисления в формирователь 161 напряжения процесс переходит к этапу S1020.
На этапе S1300 определяют, составляет ли увеличение β формирования изображения 0,15 или более. Когда увеличение β формирования изображения составляет 0,15 или более, процесс переходит к этапу S1320. Когда увеличение β формирования изображения меньше чем 0,15 на этапе S1300, процесс переходит к этапу S1410.
На этапе S1320 путем осуществления обработки фильтрацией для получаемого с этапа S1310 значения  выходного сигнала датчика угловой скорости в направлении оси Х2 (оптической оси) исключают седьмой член выражения (26) и, проводя интегрирование этого значения по времени, получают скорость
выходного сигнала датчика угловой скорости в направлении оси Х2 (оптической оси) исключают седьмой член выражения (26) и, проводя интегрирование этого значения по времени, получают скорость 
axy движения в направлении оптической оси.
На этапе S1330, на основании обуславливающей размытость скорости axy в направлении оптической оси, проводят связанное со следящим управлением вычисление для привода в движение линзы 140 автоматической фокусировки. На этапе S1340, на основании результата вычисления, связанного со следящим управлением и полученного на этапе S1330, осуществляют выдачу результата вычисления в формирователь 172 напряжения линзы автоматической фокусировки, который способствует приведению в движение линзы 140 автоматической фокусировки, а после этого процесс переходит к этапу S1020.
Подробное описание чертежа модели поворота и кругового движения, а также формулы поворота и кругового движения
Далее будет приведено описание чертежа модели поворота и кругового движения и описание формулы поворота и кругового движения. Сначала будет описана система координат устройства для стабилизации изображения.
Прежде всего будет описана подвижная система координат O2-X2Y2Z2, которая связана с фотоаппаратом. Во время дрожания фотоаппарата система координат O2-X2Y2Z2 совершает движение дрожания как единое целое с фотоаппаратом, и поэтому данная система координат называется подвижной системой координат.
Трехмерная система координат будет описана с помощью показанного на фиг.8А чертежа трехмерной системы координат. Эта система координат является ортогональной системой координат, и на фиг.8А ось X2, ось Y2 и ось Z2 перпендикулярны друг другу. Тангаж определяется как поворот вокруг оси Z2 относительно начала O2 координат, и тангажу от оси +X2 до оси +Y2 присваивается знак «плюс», при этом начало O2 координат играет роль центра. Рыскание определяется как поворот вокруг оси Y2 относительно начала O2 координат, и рысканию от оси +Z2 до оси +X2 присваивается знак «плюс». Крен определяется как поворот вокруг оси Х2 относительно начала O2 координат, и крену от оси +Y2 до оси +Z2 присваивается знак «плюс».
На фиг.8D представлен вид сбоку фотоаппарата, при этом сечение фотоаппарата согласно фиг.1 упрощено, а объектив показан так, будто он прозрачный. С помощью вида сбоку фотоаппарата согласно фиг.8D будет описана система координат O2-X2Y2Z2, которая связана с фотоаппаратом.
Начало координат O2 системы координат связано с главной точкой А всей оптической системы (съемочной оптической системы 105), которая присутствует в тубусе 102 объектива, а направление устройства для захвата изображения на оптической оси задается как положительное направление оси X2. Направление вверх фотоаппарата (направление вверх согласно этому чертежу) задается как положительное направление Y2, а остающееся направление задается как ось +Z2. В состоянии, в котором фотоаппарат спроецирован на плоскость X2Y2, положение В акселерометра 121 выражается длиной линейного сегмента rbaxy между началом O2 координат и положением В акселерометра 121, а также углом θbaxy, образуемым осью X2 и линейным сегментом rbaxy. Направление поворота в направлении к оси +Y2 от оси +X2 с осью θ2 в качестве центра задается как положительное направление.
Вид сверху фотоаппарата согласно фиг.8B иллюстрирует положение В акселерометра 121 в состоянии проекции на плоскость Z2X2. В состоянии, в котором фотоаппарат спроецирован на плоскость Z2X2, положение В акселерометра 121 выражается линейным сегментом rbazx между началом O2 координат и положением В акселерометра 121, а также углом ψbazx, образуемым осью Z2 и линейным сегментом rbazx. Направление поворота в направлении к оси +X2 от оси +Z2 задается как положительное направление. Кроме того, положение В также выражается углом ζbazx, образуемым осью X2 и линейным сегментом rbazx. Направление поворота в направлении к оси +Z2 от оси +X2 задается как положительное направление.
Вид спереди фотоаппарата согласно фиг.8C иллюстрирует положение акселерометра 121 в состоянии проекции на плоскость Y2Z2. В состоянии проекции на плоскость Y2Z2 положение В акселерометра 121 выражается длиной rbayz линейного сегмента между началом О2 координат и положением В акселерометра 121, а также углом ρbayz, образуемым между осью Y2 и линейным сегментом rbayz. Направление поворота в направлении оси +Z2 от оси +Y2 с осью O2 в качестве центра задается как положительное направление.
Далее будет описана связанная система координат O9-X9Y9Z9, в которой присутствует объект S. Система координат O9-X9Y9Z9 представляет собой единое целое с объектом и потому будет называться связанной системой координат.
На фиг.9 представлен чертеж, где иллюстрируется оптическая система фотоаппарата в трехмерном пространстве. Точка A=О2 представляет собой главную точку A уже описанной съемочной оптической системы 105, а также представляет собой начало координат O4 системы координат O4-X4Y4Z4.
Будет описано расположение связанной системы координат O9-X9Y9Z9 согласно исходному состоянию (момент времени t=0). Начало O9 координат совпадает с фотографируемым объектом. Ось +Y9 координат задается в направлении, противоположном направлению ускорения силы тяжести Земли. Остальные оси +X9 и +Z9 координат расположены произвольно. Точка D представляет собой точку формирования изображения объекта S и представлена геометрически-оптическим методом на продолжении линейного сегмента OA.
Способ получения трехмерного выражения главной точки A в связанной системе координат O9-X9Y9Z9 будет описан с помощью фиг.10A. Поскольку иллюстрируется пространственное положение фотоаппарата, на фиг.10А в качестве опорной точки изображена только главная точка A, а другие точки, такие как точка D формирования изображения, не изображены. Главная точка A показана с помощью вектора с началом O9 координат в качестве опорной точки, и этот вектор задается как 
. Длина вектора 
задается как скаляр ra. Угол до вектора
от оси Z9 с O9 в качестве центра задается как ψa. Угол от оси X9 от прямой линии OJ, которая является линией пересечения между плоскостью, в которой лежит вектор
и ось Z9, и плоскостью XY, задается как θa.
Как описано выше, вектор можно выразить в полярной системе координат тремя значениями: скаляра ra, угла ψa и угла θa. Если эти три значения можно вычислить исходя из измерения посредством датчика и т.п., то получается положение главной точки A фотоаппарата.
Ссылка: формула преобразования в ортогональную систему координат
В этом случае формула для преобразования положения главной точки A в ортогональную систему координат из полярной системы координат представляет собой нижеследующую формулу.
Ортогональная система координат изображена на фиг.10В.
Xa=rasinψa×cosθa;
Ya=rasinψa×sinθa;
Za=racosψa.
Описание системы координат проецирования
Далее со ссылками на фиг.11 будет описано выражение для координат, когда вектор
проецируется на плоскость X9Y9, и выражение для координат, когда вектор
проецируется на плоскость Z9X9. С помощью фиг.11 будет описана подвижная система координат O4-X4Y4Z4. Подвижная система координат O4-X4Y4Z4 также приведена к главной точке A. Начало O4 координат связано с главной А точкой. Более конкретно, начало O4 координат тоже движется при движении главной точки A. Ось +X4 координат всегда расположена параллельно оси +X9 координат, а ось +Y4 координат всегда расположена параллельно оси +Y9 координат. Эта параллельность всегда поддерживается, когда главная точка A движется.
Направление ускорения 
силы тяжести в главной точке A является отрицательным направлением оси Y9 координат.
Теперь будет описано выражение для двумерных координат в проекции на плоскость X9Y9. На фиг.11 точка, которая является главной точкой A, спроецированной на плоскость X9Y9, задается как главная точка Axy. Линейный сегмент между началом O9 координат и главной точкой Axy задается как скаляр raxy, а угол до скаляра raxy от оси X9 с началом O9 координат в качестве центра задается как θaxy. Угол θaxy является таким же углом, как θa, описанный выше. Чтобы пояснить тот факт, что это угол, спроецированный на ось X9Y9, ему присвоены обозначающие символы xy.
На фиг.12 представлен чертеж, иллюстрирующий состояние фотоаппарата в проекции на плоскость X9Y9. В этом случае также показаны внешние очертания и объектив фотоаппарата. Начало координат О4 системы координат O4-X4Y4 связано с главной точкой Axy которая описана выше. Когда главная точка A xy движется, ось X4 сохраняет состояние параллельности с осью X9, а ось Y4 сохраняет состояние параллельности с осью Y9.
Как описано выше, начало координат О2 системы координат O2-X2Y2 связано с главной точкой Axy и движется как единое целое с фотоаппаратом. При этом ось X2 всегда совпадает с оптической осью этого фотоаппарата. Угол во время поворота к оси X2 от оси X4 с началом O2 координат в качестве центра задается как θcaxy (=θca: совершенно одинаковое значение). Ускорение 
xy в главной точке Axy представляет положительный поворот (против часовой стрелки) от оси X4 с главной точкой Axy в качестве центра, а угол до xy задается как θgxy. θgxy - величина постоянная.
Теперь будут описаны термины, употребляемые в данном изобретении. В данном изобретении, по аналогии с движением Солнца и Земли, начало O9 координат, где присутствует объект, сопоставимо с Солнцем, а главная точка A фотоаппарата сопоставима с центром Земли. Угол θaxy называется «углом кругового движения» в пределах плоскости XY, а угол θcaxy называется «углом поворота» в пределах плоскости XY. Более конкретно, это аналогично тому факту, что термин «круговое движение» указывает, что Земля (фотоаппарат) движется вокруг Солнца (объекта), тогда как термин «поворот» указывает, что вертится сама Земля (фотоаппарат).
Далее будет описано выражение для двумерных координат, когда фотоаппарат проецируется на плоскость Z9X9. Фиг.13 иллюстрирует состояние фотоаппарата в проекции на плоскость Z9X9. Здесь также изображены внешние очертания и объектив фотоаппарата. Начало координат O4 системы координат O4-Z4X4 связано с главной Axy точкой. Когда главная точка Axy перемещается, ось Z4 сохраняет параллельное состояние по отношению к оси Z9, а ось X4 сохраняет параллельное состояние по отношению к оси X9.
Начало координат O2 системы координат O2-X2Y2 связано с главной Axy точкой и перемещается вместе с фотоаппаратом как единое целое. При этом ось Х2 всегда совпадает с оптической осью фотоаппарата. Угол во время поворота к оси X2 от оси Z4 с началом O2 координат в качестве центра задается как ψcazx. Кроме того, угол во время поворота к оси Х2 от оси X4 с началом O2 координат в качестве центра задается как ζcazx.
Далее будет описано исходное состояние фотоаппарата в исходный момент времени t=0 в трехмерной системе координат согласно фиг.14. Описание будет приведено в предположении, что в связанной системе координат O9-X9Y9Z9 фотограф принудительно устанавливает соответствие фотографируемого объекта S(t=0) центру видоискателя или жидкокристаллического дисплея (ЖКД), а объект S(t=0) - для удобства - в этом случае находится на оптической оси. Соответствие начала О9 координат объекту S(t=0) устанавливается принудительно. Главная точка А съемочной оптической системы 105 и точка D формирования изображения, где формируется изображение объекта S(t=0), геометрически и оптически присутствуют на оптической оси - прямой линии. Ускорение 
силы тяжести в положении главной точки A направлено в отрицательном направлении оси Y9 координат.
Если фотограф принудительно вызывает соответствие объекта S, который желательно сфотографировать, рамке автоматической фокусировки (АФ) не в центре видоискателя или жидкокристаллического дисплея, то линейный сегмент, соединяющий объект S и главную точку A, задается как 
и может быть смоделирован.
Далее задается новая связанная система координат O-XYZ. Принудительно устанавливается соответствие начала координат О связанной системы координат O-XYZ с началом O9 координат и принудительно устанавливается соответствие оси X координат и оптической оси фотоаппарата. Направление оси Y координат задается так, что ось Y9 координат находится в плоскости XY. Если ось X координат и ось Y координат заданы, то ось Z координат оказывается однозначно заданной.
Как показано на фиг.15, для удобства описания, связанная система координат O9-X9Y9Z9 не будет проиллюстрирована, а ниже будет проиллюстрирована только связанная система координат O-XYZ. По вышеупомянутому определению системы координат в исходном состоянии - в момент времени t=0 - вектор 
ускорения силы тяжести лежит в пределах плоскости XY.
Далее будет выведено выражение для размытости, иллюстрирующее взаимосвязь дрожания фотоаппарата и движения изображения. Чтобы облегчить формулировку математического выражения, используется полярная система координат. Далее берут первую производную и вторую производную вектора и угла. Так, с помощью фиг.16, где представлен базовый пояснительный чертеж полярной системы координат, будет описан смысл обычно используемого математического выражения. Выражение для положения точки А, которая присутствует в системе координат O-XY, показано с помощью положения 
. Положение 
является функцией времени и может быть также описано как 
(t). Вектор положения имеет следующий вид:
=
=rejθ
=r·cosθ+jr·sinθ (1)
Действительный член r·cosθ представляет собой составляющую в направлении Х, а мнимый член jr·sinθ представляет собой составляющую в направлении Y. Будучи выраженными в ортогональной системе координат, составляющая в направлении Х имеет вид Ax=r·cosθ, а составляющая в направлении Y имеет вид Ay=r·sinθ.
Далее получают скорость 
путем взятия первой производной положения 
по времени t. Вектор скорости имеет следующий вид:
= 
ejθ+r 
ej(θ+π/2) (2)
Будучи выраженными в ортогональной системе координат, составляющая в направлении Х имеет вид
Vx= 
x=
·cosθ+r
·cos(θ+π/2),
а составляющая в направлении Y имеет вид
Vy= y=
·sinθ+r
·sin(θ+π/2).
Далее получают ускорение 
путем взятия первой производной скорости 
по времени t. Вектор ускорения имеет следующий вид:
где первый член 
ejθ представляет составляющую ускорения согласно изменению длины r;
второй член r 
ej(θ+π)представляет составляющую центростремительной силы;
третий член r 
ej(θ+π/2) представляет составляющую углового ускорения; а
четвертый член 2
ej(θ+π/2) представляет составляющую силы Кориолиса.
Будучи выраженным в ортогональной системе координат, вектор ускорения получается посредством следующих выражений (4a) и (4b).
Составляющая 
x в направлении Х:
Составляющая y в направлении Y:
Теоретическая формула согласно данному изобретению будет описана в двумерной системе координат XY, когда фотоаппарат спроецирован на плоскость XY, изображенную на фиг.17. На фиг.17 также будут описаны задание системы координат и коды двумерной системы координат XY. Описание будет приведено путем частичного включения содержания, которое уже описано.
Объект S находится в связанной системе координат O-XY. Коды будут описаны в исходном состоянии в момент времени t=0. В исходном состоянии (t=0) оптическая ось фотоаппарата соответствует оси Х координат связанной системы координат O-XY. В исходном состоянии (t=0) объект S соответствует началу координат О связанной системы координат O-XY. В связанной системе координат O-XY главная точка A выражается вектором 
axy. Длина линейного сегмента между началом О координат и главной точкой A фотоаппарата задается как скаляр raxy, а точка, где начало О координат образует изображение посредством объектива, задается как точка D формирования изображения. Точка С представляет собой центральную точку устройства 203 для захвата изображения, а в исходном состоянии (t=0) точке С соответствует точка D формирования изображения.
Описание кодов будет приведено на чертеже состояния движения в некоторый момент времени (t=t2). Начало координат O4 системы координат O4-X4Y4 связано с главной точкой A, ось X4 координат всегда поддерживается параллельной оси X координат, а ось Y4 координат всегда поддерживается параллельной оси Y координат. Начало координат O2 системы координат O2-X2Y2 связано с главной точкой A, а ось X2 координат всегда поддерживается в проходящей в направлении оптической оси фотоаппарата.
Акселерометр 121 закреплен в точке В внутри фотоаппарата, а расстояние до нее выражается вектором 
baxy в системе координат O2-X2Y2. Длина линейного сегмента AB задается как скаляр rbaxy, а угол поворота к линейному сегменту AB от оси Х2 координат с началом O2 координат в качестве центра задается как θbaxy.
Изображение начала О координат образует - с помощью объектива - изображение в положении точки D, отличающейся от точки С центра устройства для захвата изображения. Точка D формирования изображения с главной точкой A в качестве опорной точки выражаются вектором 
daxy. Точка D с точкой С в качестве опорной точки выражаются вектором dcxy. Скаляр rdcxy, который представляет собой отрезок от точки С до точки D, является длиной перемещения точки D формирования изображения с момента времени t=0 до момента времени t2. Вектор скорости относительного движения точки D формирования изображения относительно точки С в подвижной системе координат O2-X2Y2 в некоторый момент времени t2 задается как  .
.
В связанной системе координат O-XY угол, образуемый до вектора
axy от оси Х координат с началом О координат в качестве центра, задается как угол θaxy поворота. В подвижной системе координат O4-X4Y4 образуемый угол от оси Х4 координат до оси X2 координат с началом О4 координат в качестве центра задается как угол θcaxy кругового движения.
Первая производная вектора axy по времени t описывается как 
axy, а вторая производная этого вектора описывается как 
axy. caxy описывается аналогичным образом как caxy и caxy, daxy описывается аналогичным образом как daxy и daxy, а угол θaxy кругового движения описывается аналогичным образом как 
axy и 
axy, и угол θcaxy поворота аналогичным образом описывается как caxy и 
caxy.
В некоторый момент времени t2 получают скорость  относительного движения точки D формирования изображения с точкой С в качестве центра в подвижной системе координат O2-X2Y2. Скорость
относительного движения точки D формирования изображения с точкой С в качестве центра в подвижной системе координат O2-X2Y2. Скорость  движения в точке D формирования изображения в связанной системе координат O-XY получают с помощью нижеследующего выражения (5).
движения в точке D формирования изображения в связанной системе координат O-XY получают с помощью нижеследующего выражения (5).

Скорость  движения центра С устройства для захвата изображения в связанной системе координат O-XY получают с помощью нижеследующего выражения (6).
движения центра С устройства для захвата изображения в связанной системе координат O-XY получают с помощью нижеследующего выражения (6).

Из описывающей формирование изображения формулы геометрической оптики выводят выражение (7):
1/f=1/raxy+1/rdaxy (7)
где f - это фокусное расстояние оптической системы. Затем видоизменяют выражение (7).

Исходя из вышеуказанного выражения скорость  относительного движения точки D формирования изображения относительно точки С в связанной системе координат O-XY получают из нижеследующего выражения (8).
относительного движения точки D формирования изображения относительно точки С в связанной системе координат O-XY получают из нижеследующего выражения (8).

Взаимосвязь между скаляром rcaxy и скаляром raxy(t=o) получают из нижеследующего выражения (9).

Подставляя вышеописанное выражение, скорость  относительного движения в связанной системе координат XY получают с помощью нижеследующего выражения (10).
относительного движения в связанной системе координат XY получают с помощью нижеследующего выражения (10).

Затем осуществляют преобразование координат из связанной системы координат O-XY в подвижную систему координат O2-X2Y2, связанную с фотоаппаратом. Для этого поворачивают вектор  на угол -θcaxy поворота. Поэтому скорость
на угол -θcaxy поворота. Поэтому скорость  движения изображения в подвижной системе координат O2-X2Y2, связанной с фотоаппаратом, получают из нижеследующего выражения (11).
движения изображения в подвижной системе координат O2-X2Y2, связанной с фотоаппаратом, получают из нижеследующего выражения (11).

После дальнейшего упорядочения этого выражения получается вышеупомянутое выражение (12). Поскольку скорость  движения изображения в подвижной системе координат O2-X2Y2 является скоростью относительного движения изображения относительно поверхности для захвата изображении фотоаппарата, это выражение является строгим выражением, строго выражающим движение изображения, которое действительно регистрируется в качестве изображения. В этом строгом выражении мнимая часть, а именно составляющая в направлении оси Y2 координат, является составляющей движения изображения в вертикальном направлении фотоаппарата в пределах плоскости съемки изображения. Кроме того, действительная часть выражения (12), а именно составляющая в направлении оси Х2 координат, является составляющей движения изображения в направлении оптической оси фотоаппарата в пределах плоскости съемки изображения, а также является составляющей, вследствие которой возникает так называемое размытое изображение.
движения изображения в подвижной системе координат O2-X2Y2 является скоростью относительного движения изображения относительно поверхности для захвата изображении фотоаппарата, это выражение является строгим выражением, строго выражающим движение изображения, которое действительно регистрируется в качестве изображения. В этом строгом выражении мнимая часть, а именно составляющая в направлении оси Y2 координат, является составляющей движения изображения в вертикальном направлении фотоаппарата в пределах плоскости съемки изображения. Кроме того, действительная часть выражения (12), а именно составляющая в направлении оси Х2 координат, является составляющей движения изображения в направлении оптической оси фотоаппарата в пределах плоскости съемки изображения, а также является составляющей, вследствие которой возникает так называемое размытое изображение.
Дрожание фотоаппарата, поддерживаемого рукой фотографа, рассматривается как колебательное движение с очень малой амплитудой и с некоторой точкой пространства в качестве центра, и поэтому скорость  движения изображения в подвижной системе координат O2-X2Y2, получаемая строго, преобразуется в приближенное выражение при следующих условиях.
движения изображения в подвижной системе координат O2-X2Y2, получаемая строго, преобразуется в приближенное выражение при следующих условиях.
Состояние в некоторый момент времени t2 предполагается соответствующим колебаниям в окрестности исходного состояния в момент времени t=0, и получается следующее выражение (13).
raxy≈(1+β)f/β 
(13)
В преобразованном виде получаем
raxy-f≈f/β. ∴ f·raxy/(raxy-f)=f·(l+β)(f/β)/(f/β)=f·(1+β).
Если это преобразование имеет место, то 
xy≈0 и θaxy+π/2-θcaxy≈π/2 подставляют в  , что позволяет вывести нижеследующее выражение (14).
, что позволяет вывести нижеследующее выражение (14).

Поэтому приближенная теоретическая формула скорости  движения изображения в подвижной системе координат O2-X2Y2 в пределах плоскости XY становится вышеупомянутым выражением (15). Составляющая, отображающая направление вектора движения изображения согласно правой стороне выражения (15), имеет вид ejπ/2, и поэтому направление скорости движения является направлением оси Y2, т.е. проходит под углом 90 градусов от оси X2.
движения изображения в подвижной системе координат O2-X2Y2 в пределах плоскости XY становится вышеупомянутым выражением (15). Составляющая, отображающая направление вектора движения изображения согласно правой стороне выражения (15), имеет вид ejπ/2, и поэтому направление скорости движения является направлением оси Y2, т.е. проходит под углом 90 градусов от оси X2. 
caxy - это угловая скорость поворота вокруг главной точки, A, и axy - это угловая скорость кругового движения главной точки, A, вокруг начала координат, О, связанной системы координат. β представляет увеличение для формирования изображения применительно к этой оптической системе, а f представляет фактическое фокусное расстояние. (1+β)f представляет фокусное расстояние со стороны изображения. Следовательно, это приближенное выражение означает, что скорость движения изображения в направлении Y2 в пределах поверхности для захвата изображения имеет следующий вид: (фокусное расстояние со стороны изображения)×(значение, получаемое путем вычитания угловой скорости кругового движения из угловой скорости поворота).
Теперь, с помощью фиг.18, будет описана теоретическая формула движения изображения согласно данному изобретению в двумерной системе координат ZX в проекции на плоскость ZX. Когда дрожание представляет собой колебательное движение, имеющее очень малую амплитуду, с положением, соответствующим исходному состоянию, в качестве центра, приближенные условия таковы, что ζazx≈0, ζcazx≈0, razx≈ постоянная величина, 
azx≈0 и 
azx≈0. Исходя из этих приближенных условий приближенная теоретическая формула скорости  движения изображения в подвижной системе координат O2-Z2X2 в пределах плоскости ZY представляется нижеследующим выражением (16) посредством процедуры, аналогичной получению приближенной формулы скорости
движения изображения в подвижной системе координат O2-Z2X2 в пределах плоскости ZY представляется нижеследующим выражением (16) посредством процедуры, аналогичной получению приближенной формулы скорости  движения изображения в плоскости XY.
движения изображения в плоскости XY.
Составляющая, отображающая направление вектора размытости изображения, или правая сторона выражения (16), имеет вид ejπ/2, и поэтому направление скорости движения является направлением оси Z2, т.е. проходит под углом 90 градусов от оси X2. 
cazx представляет угловую скорость поворота вокруг главной точки, A, а 
azx представляет угловую скорость кругового движения главной точки, A, вокруг начала координат, О, связанной системы координат. β представляет увеличение при формировании изображения для этой оптической системы, а f представляет фактическое фокусное расстояние этой оптической системы. (1+β)f представляет фокусное расстояние со стороны изображения. Следовательно, это приближенная формула означает, что скорость движения изображения в направлении Х2 в пределах поверхности для захвата изображения имеет следующий вид: (фокусное расстояние со стороны изображения)×(значение, получаемое путем вычитания угловой скорости кругового движения из угловой скорости поворота).
Также будет описан выходной сигнал акселерометра 121. В координатной плоскости XY угловая скорость кругового движения главной точки A можно выразить следующим образом.
Следовательно, ускорение 
a можно измерить и вычислить. В этом варианте осуществления акселерометр 121 закреплен в точке B, и поэтому значение ускорения в точке A должно быть получено путем вычисления на основании выходного сигнала акселерометра в точке B. В данном случае получают значение разности между ускорением в точке В и ускорением в главной точке A, где фактически находится акселерометр, и теоретическое значение ускорения в точке В. Теперь поясним составляющую (член), которая (который) требуется при борьбе с размытостью изображения.
Во-первых, вектор а(O-XY) ускорения, которое возникает в главной точке A, в связанной системе координат O-XY получают из нижеследующего выражения (17).
(17)
(В данном случае сила тяжести, G, воздействует на акселерометр 121 как сила реакции, и поэтому из угла θgxy вычитаются 180 градусов, отображающие направление силы тяжести.)
Теперь будет получено относительное ускорение baxy(O-XY) в точке В относительно главной точки A в связанной системе координат O-XY. Во-первых, получают относительное ускорение baxy(O-XY) из нижеследующего выражения (18).
Если взять первую производную выражения (18) по времени t, то можно получить вектор скорости. Поскольку точки A и В связаны с одним и тем же жестким корпусом, относительная скорость 
baxy(O-XY) получается из нижеследующего выражения (19) исходя из условий 
baxy=0, θbaxy=величина постоянная, 
baxy=0 и 
caxy=составляющая поворота (переменная).

Далее получают вектор ускорения. Вектор baxy(O-XY) относительного ускорения в точке В (в положении акселерометра) относительно точки А в связанной системе координат O-XY получают из нижеследующего выражения (20).

(= центростремительная сила + величина углового ускорения)
Значение этого выражения является величиной ошибки вектора скорости, обусловленной тем, что акселерометр 121 на самом деле установлен в положении В, а не в главной точке A, которое является идеальным положением.
Ускорение bxy(O-XY) в точке B в связанной системе координат O-XY выражают суммой векторов, идущих из начала О координат в главную точку A (этот вектор уже получен), а также из главной точки A в точку В. Сначала положение 
bxy(O-XY) в точке В в связанной системе координат O-XY выражают, учитывая главную точку A, с помощью нижеследующего выражения (21). Вектор положения имеет следующий вид:

Вектор скорости имеет следующий вид:

Вектор ускорения имеет следующий вид:

Далее будет вычислено ускорение  в точке B в подвижной системе координат O2-X2Y2. Широта (скаляр) ускорения, которое желательно вычислить, находится в связанной системе координат O-XYZ, где присутствует объект. Кроме того, ускорение связано с подвижной системой координат O2-X2Y2, три оси акселерометра 121 ориентированы в направлении оси X2, направлении оси Y2 и направлении оси Z2, а составляющую ускорения нужно выразить посредством направлений осей координат подвижной системы координат O2-X2Y2.
в точке B в подвижной системе координат O2-X2Y2. Широта (скаляр) ускорения, которое желательно вычислить, находится в связанной системе координат O-XYZ, где присутствует объект. Кроме того, ускорение связано с подвижной системой координат O2-X2Y2, три оси акселерометра 121 ориентированы в направлении оси X2, направлении оси Y2 и направлении оси Z2, а составляющую ускорения нужно выразить посредством направлений осей координат подвижной системы координат O2-X2Y2.
Теперь будет подробно описано состояние положения акселерометра 121. Акселерометр 121, выдающий выходные сигналы, соответствующие трем осям, находится в точке B. В подвижной системе координат O2-X2Y2 оси акселерометра заданы с возможностью получения: выходного сигнала ACCX2 акселерометра с направлением чувствительности, идущим в направлении, параллельном оси Х2, выходного сигнала ACCY2 акселерометра с направлением чувствительности, идущим в направлении, параллельном оси Y2 и выходного сигнала ACCZ2 акселерометра с направлением чувствительности, идущим в направлении, параллельном оси Z2. Поскольку здесь движение происходит в плоскости XY, будут описаны выходной сигнал ACCX2 акселерометра и выходной сигнал ACCY2 акселерометра.
Чтобы получить ускорение  путем преобразования ускорения
путем преобразования ускорения bxy(O-XY) в точке B в связанной системе координат O-XY, полученного выше, в составляющие в направлениях оси Х2 и оси Y2 с началом О координат как есть, можно осуществить преобразование координат в направлении, противоположном углу θcaxy поворота фотоаппарата. Поэтому устанавливают нижеследующее выражение (24).
Выходной сигнал акселерометра имеет следующий вид:

(первый член: движение в направлении оптической оси)
(второй член: центростремительная сила кругового движения)
(третий член: ускорение кругового движения)
(четвертый член: сила Кориолиса)
(пятый член: центростремительная сила поворота)

(шестой член: ускорение поворота)
(седьмой член: составляющая ускорения силы тяжести)
(24)
Приближенное выражение получают путем подстановки приближенных условий. Ограничительные условия задают так, что угловая скорость 
axy кругового движения и угловая скорость 
caxy поворота представляют собой колебания (±) с малой амплитудой около 0, так что axy≈0 и caxy≈0. Кроме того, предполагается, что скаляр raxy изменяется весьма незначительно, так что axy имеет конечное значение, 
axy имеет конечное значение, а θbaxy, по существу, удовлетворяет неравенству π/2-π/4≤θbaxy≤π/2+π/4.
Выходной сигнал акселерометра имеет следующий вид:

(первый член: движение в направлении оптической оси)
(второй член: центростремительная сила кругового движения)
(третий член: ускорение кругового движения)

(четвертый член: сила Кориолиса)
(пятый член: центростремительная сила кругового движения)
(шестой член: ускорение поворота)
(седьмой член: составляющая ускорения силы тяжести)
(25)
Эта действительная часть представляет собой выходной сигнал ACCX2 акселерометра в направлении оси X2, а мнимая часть представляет собой выходной сигнал ACCY2 акселерометра в направлении оси Y2. Вышеописанное представление согласно полярной системе координат можно разложить на X2-составляющую и Y2-составляющую в представлении согласно ортогональной системе координат.
Выходной сигнал акселерометра в направлении оси X2:
(первый член: движение в направлении оптической оси)
(второй член: центростремительная сила кругового движения)
(пятый член: центростремительная сила поворота)
(шестой член: ускорение поворота)
М 
(седьмой член: составляющая ускорения силы тяжести)
(26)
В выражении (26) для коррекции движения в направлении оптической оси нужен только первый член 
axy. Второй член, пятый член, шестой член и седьмой член являются составляющими, не обязательными для коррекции движения в направлении оптической оси, и если они не исключены, то они становятся составляющими ошибки, когда ускорение axy происходит в направлении оси Х2, которая является оптической осью. Второй, пятый, шестой и седьмой члены можно исключить методом, аналогичным тому, который применяется в случае нижеследующего выражения (27).
Чтобы исключить второй член (центростремительную силу кругового движения), нужно получить значения raxy и 
axy, которые включены во второй член. raxy, по существу, равен фокусному расстоянию (1+β)f/β со стороны объекта (β представляет увеличение формирования изображения). Устройства для захвата изображения в последние годы оснащаются кодером фокусировки, который измеряет положение при движении линзы 140 автоматической фокусировки. Поэтому легко вычислить расстояние до объекта исходя из значения выходного сигнала кодера фокусировки в сфокусированном состоянии. В результате получают raxy. Значение, получаемое из нижеследующего выражения (27), используют в качестве угловой скорости axy кругового движения.
Выходной сигнал акселерометра в направлении оси Х2:
(третий член: ускорение кругового движения)
(четвертый член: сила Кориолиса)
(пятый член: центростремительная сила поворота)

(шестой член: ускорение поворота)
(седьмой член: составляющая ускорения силы тяжести)
(27)
Теперь будут описаны соответствующие члены выходного сигнала Accy2(О-X2Y2) акселерометра в направлении оси Y2. Третий член jraxy 
axy - это составляющая, необходимая для получения угловой скорости 
axy кругового движения, которую желательно получить в данном варианте осуществления, и эту угловую скорость axy кругового движения получают путем деления третьего члена на известную величину raxy и интегрирования результата. Четвертый член j2 
axy axy представляет силу Кориолиса. Если движение фотоаппарата в направлении оптической оси является малым, то устанавливают axy≈0, и четвертым членом можно пренебречь. Пятый член и шестой член являются составляющими ошибки, которые включены в выходной сигнал Accy2(О-X2Y2) акселерометра, поскольку акселерометр 121 нельзя расположить в идеальной главной точке A, и он расположен в точке B.
Пятый член  представляет центростремительную силу, которая возникает из-за того, что акселерометр 121 поворачивается вокруг главной точки A. rbaxy и θbaxy - это координаты точки В, в которой установлен акселерометр 121, и они известны.
представляет центростремительную силу, которая возникает из-за того, что акселерометр 121 поворачивается вокруг главной точки A. rbaxy и θbaxy - это координаты точки В, в которой установлен акселерометр 121, и они известны. 
caxy представляет угловую скорость поворота и является значением, которое можно измерить с помощью датчика 130 угловой скорости, установленного на фотоаппарате. Следовательно, значение пятого члена можно вычислить.
Шестой член  представляет ускорение, когда акселерометр 121 поворачивается вокруг главной точки A, а rbaxy и θbaxy - это координаты точки В, в которой установлен акселерометр 121, и они известны.
представляет ускорение, когда акселерометр 121 поворачивается вокруг главной точки A, а rbaxy и θbaxy - это координаты точки В, в которой установлен акселерометр 121, и они известны. 
caxy можно вычислить путем дифференцирования значения из датчика 130 угловой скорости, установленного на фотоаппарате. Следовательно, значение шестого члена можно вычислить.
Седьмой член  - это влияние ускорения силы тяжести, и его можно считать константой в приближенном выражении, а значит - можно исключить с помощью схемы обработки фильтрацией.
- это влияние ускорения силы тяжести, и его можно считать константой в приближенном выражении, а значит - можно исключить с помощью схемы обработки фильтрацией.
Как описано выше, выходной сигнал Accy2(О-X2Y2) акселерометра в направлении оси Y2 включает в себя составляющие, не обязательные для угловой скорости axy, которую желательно получить в данном изобретении. Вместе с тем стало ясно, что путем размещения акселерометра 121 в положении, где необязательные составляющие оказываются минимальными, необязательную угловую скорость axy кругового движения можно получить без вычисления, связанного с коррекцией.
Аналогичным образом исходя из выходного сигнала Accx2(О-X2Y2) акселерометра в направлении Х2 можно получить скорость 
axy, по существу, в направлении оптической оси фотоаппарата, которую желательно вычислить. Первый член 
axy соответствует движению в направлении оптической оси. Второй член, пятый член, шестой член и седьмой член можно исключить по той же причине, которая описана в связи с выходным сигналом Accy2(О-X2Y2) акселерометра в направлении оси Y2. Вместе с тем, аналогичным образом размещая акселерометр 121 в положении, где необязательные составляющие оказываются минимальными, угловую скорость axy движения, по существу, в направлении оптической оси фотоаппарата можно получить исходя из выходного сигнала Accx2(О-X2Y2) акселерометра в направлении оси X2 без вычисления, связанного с коррекцией.
В варианте 1 осуществления, когда отношение угловой скорости кругового движения к угловой скорости поворота составляет 0,1 или менее, угловая скорость кругового движения, по существу, мала по отношению к угловой скорости поворота, и поэтому вычисление, связанное со стабилизацией изображения, упрощается, что приводит к повышению его скорости и снижению энергопотребления.
Кроме того, когда экспонирование согласно съемке начинают полным нажатием непоказанной спусковой кнопки затвора, угловая скорость кругового движения оценивается в реальном масштабе времени путем умножения отношения угловой скорости кругового движения к прошлой угловой скорости поворота на угловую скорость поворота в реальном масштабе времени. Тем самым, даже если выходной сигнал акселерометра 121 искажен ударом затвора и рабочими колебаниями фотоаппарата во время съемки, можно предотвратить использование значения ускорения кругового движения, которое в значительной степени ошибочно, и гарантировать стабильную коррекцию размытости изображения.
В съемочной оптической системе согласно данному варианту осуществления для ближайшей окрестности задается увеличение, равное единице, но ближайшая окрестность этим не ограничивается, поскольку даже если увеличение в ближайшей окрестности является, например, двукратным в соответствии со спецификациями съемочной оптической системы, к которой применяется настоящее изобретение, сумма произведений функции коэффициента ошибок при каждом увеличении формирования изображения во время съемки получается в диапазоне между двойкой и 0,0, вследствие чего можно получить положение акселерометра 121, где составляющие ошибки оказываются минимальными. Поэтому очевидно, что влияние содержания, описанного в данном варианте осуществления, не изменяется безотносительно того увеличения при формировании изображения во время съемки, которое имеется в ближайшей окрестности съемочной оптической системы.
Кроме того, угловое движение и параллельное движение заново и строго промоделированы и математически выражены как поворот и круговое движение, и поэтому какому бы состоянию ни соответствовали состояния составляющих движения, можно осуществить точную стабилизацию изображении без отказа управления. Помимо этого, поскольку акселерометр находится в положении, где величина ошибки, сопровождающая изменение положения главной точки съемочной оптической системы, становится минимальной, вследствие этого оказывается возможным осуществление точной стабилизации изображения в соответствии с изменением положения главной точки съемочной оптической системы. Кроме того, стабилизация изображения осуществляется с использованием разности между угловой скоростью поворота и угловой скоростью кругового движения, и поэтому можно уменьшить объем обработки при коррекции после вычисления разности. Помимо этого, единицы измерения поворота и кругового движения одинаковы (например: рад/сек), и поэтому вычисление становится простым. Кроме того, движение изображения на поверхности для захвата изображения устройства для захвата изображения и движение в направлении оптической оси можно представить одним и тем же выражением, и поэтому вычисление, связанное с коррекцией движения изображения, и вычисление, связанное с коррекцией движения в направлении оптической оси, можно осуществлять одновременно.
Вариант 2 осуществления
Вариант 2 осуществления будет описан с помощью фиг.19A и 19B. В варианте 1 осуществления коэффициент ошибок при каждом увеличении формирования изображения во время съемки получают с помощью выражения (33), а из результата суммы произведений значений получают положение акселерометра 121, в котором коэффициент ошибок становится минимальным. Однако в данном варианте осуществления коэффициент ошибок при каждом увеличении формирования изображения во время съемки, полученный с помощью выражения (33), умножают на частоту съемки получения взвешенного значения.
Как описано в варианте 1 осуществления, на функцию коэффициента ошибок при каждом увеличении формирования изображения во время съемки, полученную с помощью выражения (33), умножают частоту съемки при каждом увеличении формирования изображения во время съемки, известную в результате серьезного исследования, проведенного заявителем данной заявки. Частота съемки иллюстрируется на фиг.19A, а результат умножения функции коэффициента ошибок, когда акселерометр 121 расположен так, что это соответствует увеличению β=0,5 при съемке, на частоту съемки иллюстрируется на фиг.19B. Фиг.20 иллюстрирует то, как результат интегрирования значения при каждом формировании изображения во время съемки, равный величине (коэффициент ошибок)×(частота съемки), которая получается, как показано на фиг.19В, изменяется, когда акселерометр 121 оказывается в положении, соответствующем каждому увеличению формирования изображения во время съемки.
Как показано на фиг.20, коэффициент ошибок становится минимальным, когда акселерометр 121 находится в окрестности положения, соответствующего увеличению формирования изображения во время съемки, составляющему β=0,6, по сравнению со случаем, в котором акселерометр находится в положениях, соответствующих другим увеличениям при формировании изображения во время съемки. Следовательно, составляющие ошибки в выходном сигнале акселерометра 121 можно минимизировать, располагая акселерометр 121 в окрестности положения, соответствующего увеличению формирования изображения во время съемки, составляющему β=0,6, обеспечиваемому съемочной оптической системой 105, и поэтому не требуется время на вычисление, связанное с коррекцией выходного сигнала акселерометра 121. Тем самым можно осуществить точную коррекцию размытости.
Кстати, рассмотрим случай, когда функция коэффициента ошибок при каждом увеличении формирования изображения во время съемки, получаемая с помощью выражения (33), взвешивается посредством эффективной величины перемещения при параллельном движении, соответствующей каждому увеличению формирования изображения во время съемки. Фиг.21 иллюстрирует то, как результат интегрирования значения при каждом увеличении формирования изображения во время съемки, равный величине (коэффициент ошибок)×(эффективная величина перемещения при параллельном движении), изменяется, когда акселерометр 121 оказывается в положении, соответствующем каждому увеличению формирования изображения во время съемки. Как показано на фиг.21, коэффициент ошибок становится минимальным, когда акселерометр 121 находится в окрестности положения, соответствующего увеличению формирования изображения во время съемки, составляющему β=0,8, по сравнению со случаем, в котором акселерометр находится в положениях, соответствующих другим увеличениям формирования изображения во время съемки. Следовательно, составляющие ошибки в выходном сигнале акселерометра 121 можно минимизировать, располагая акселерометр 121 в окрестности положения, соответствующего увеличению формирования изображения во время съемки, составляющему β=0,8, обеспечиваемому съемочной оптической системой 105, и поэтому не требуется время на вычисление, связанное с коррекцией выходного сигнала акселерометра 121. Тем самым можно осуществить точную коррекцию размытости.
Как описано выше, за счет взвешивания коэффициента ошибок с использованием частоты съемки и эффективной величины перемещения при параллельном движении акселерометр 121 можно размещать в положении, соответствующем минимуму, которое оказывается более подходящим для использования фотоаппарата фотографом. Излишне говорить, что за счет взвешивания коэффициента ошибок с использованием частоты съемки и эффективной величины перемещения при параллельном движении акселерометр 121 также можно размещать в положении, где коэффициент ошибок минимален.
Вариант 3 осуществления
Вариант 3 осуществления будет описан с помощью фиг.22A и 22B. Предусматривается тот же процесс, что и показанный на фиг.7А и 7В в соответствии с вариантом 1 осуществления. Поэтому для того же процесса употребляются те же позиции и символы, а их описание будет опущено.
После вычисления угловой скорости кругового движения на этапе S1100 согласно фиг.22A и 22B процесс переходит к этапу S2610. На этапе S2610 определяют, составляет ли увеличение при формировании изображения 0,2 или более (т.е. соответствует ли оно заранее определенному значению или превышает его). В случае если увеличение составляет 0,2 или более, процесс переходит к этапу S2620, а в случае, если оно меньше чем 0,2 (меньше, чем заранее определенное значение), процесс переходит к этапу S1130. На этапе S1130 проводят вычисление, связанное с коррекцией поворота, как и в варианте 1 осуществления.
На этапе S2620 определяют, находится ли угловая скорость кругового движения по отношению к угловой скорости поворота в диапазоне между -0,9 и +0,9 (заранее определенное значение). Если этот параметр находится в пределах ±0,9, то процесс переходит к этапу S1120. Когда этот параметр меньше чем -0,9, или превышает +0,9, процесс переходит к этапу S2630.
На этапе S2630 фиксируют (сохраняют) отношение угловых скоростей как константу (заданную константу) со значением 0,9, а на следующем этапе S2640 вычисляют оценку данной угловой скорости кругового движения, умножая угловую скорость поворота, полученную в реальном масштабе времени, на постоянное отношение угловых скоростей, равное 0,9, и процесс переходит к следующему этапу S1120. На этапе S1120 проводят вычисление, связанное с коррекцией движения по разности поворота и кругового движения, как и в варианте 1 осуществления.
В варианте 3 осуществления, когда увеличение при формировании изображения меньше чем 0,2, угловая скорость кругового движения, по существу, мала по отношению к угловой скорости поворота, и поэтому вычисление, связанное со стабилизацией изображения, упрощается, что ведет к повышению скорости вычисления и снижению энергопотребления. Кроме того, отношение угловой скорости кругового движения к угловой скорости поворота редко превышает единицу, и когда это отношение выходит за пределы ±0,9, ошибочная избыточная коррекция предотвращается путем фиксации упомянутого отношения на уровне константы 0,9.
Хотя настоящее изобретение описано применительно к возможному варианту осуществления, следует понять, что изобретение не ограничивается описанным возможным вариантом осуществления. Объем притязаний нижеследующей формулы изобретения следует трактовать в самом широком смысле как охватывающий все такие модификации, а также эквивалентные конструкции и функции.
В этой заявке выдвигаются притязания на приоритет по заявке №2009-140255 на патент Японии, поданной 11 июня 2009 г., содержание которой во всей его полноте включено сюда посредством ссылки.
Claims (17)
1. Устройство для стабилизации изображения, содержащее
съемочную оптическую систему, которая осуществляет съемку объекта, при этом главная точка съемочной оптической системы перемещается во второе положение главной точки из первого положения главной точки в направлении оптической оси съемочной оптической системы, и
детектор ускорения, который обнаруживает ускорение, прикладываемое к устройству для стабилизации изображения, выдает это ускорение и располагается между первым положением главной точки и вторым положением главной точки в направлении оптической оси съемочной оптической системы,
детектор угловой скорости, который обнаруживает угловую скорость, прикладываемую к устройству для стабилизации изображения, и выдает эту угловую скорость,
блок управления, который осуществляет управление стабилизацией изображения на основании угловой скорости, обнаруживаемой детектором угловой скорости, и ускорения, обнаруживаемого детектором ускорения.
съемочную оптическую систему, которая осуществляет съемку объекта, при этом главная точка съемочной оптической системы перемещается во второе положение главной точки из первого положения главной точки в направлении оптической оси съемочной оптической системы, и
детектор ускорения, который обнаруживает ускорение, прикладываемое к устройству для стабилизации изображения, выдает это ускорение и располагается между первым положением главной точки и вторым положением главной точки в направлении оптической оси съемочной оптической системы,
детектор угловой скорости, который обнаруживает угловую скорость, прикладываемую к устройству для стабилизации изображения, и выдает эту угловую скорость,
блок управления, который осуществляет управление стабилизацией изображения на основании угловой скорости, обнаруживаемой детектором угловой скорости, и ускорения, обнаруживаемого детектором ускорения.
2. Устройство для стабилизации изображения по п.1, дополнительно содержащее
блок вычисления увеличения, который вычисляет увеличение формирования изображения, обеспечиваемое съемочной оптической системой,
при этом детектор ускорения находится в положении, где увеличение формирования изображения составляет примерно 0,5.
блок вычисления увеличения, который вычисляет увеличение формирования изображения, обеспечиваемое съемочной оптической системой,
при этом детектор ускорения находится в положении, где увеличение формирования изображения составляет примерно 0,5.
3. Устройство для стабилизации изображения по п.1, в котором детектор ускорения предусмотрен на рамочном элементе, который удерживает объектив, составляющий съемочную оптическую систему, или на упорном элементе, находящемся в оптической системе.
4. Устройство для стабилизации изображения по п.1, дополнительно содержащее
блок вычисления, который вычисляет положение главной точки в съемочной оптической системе, и
положение главной точки, вычисляемое блоком вычисления.
блок вычисления, который вычисляет положение главной точки в съемочной оптической системе, и
положение главной точки, вычисляемое блоком вычисления.
5. Устройство для стабилизации изображения по п.4, дополнительно содержащее
первый блок вычисления угловой скорости, который вычисляет первую составляющую угловой скорости вокруг положения главной точки, вычисленного блоком вычисления, на основании выходного сигнала детектора угловой скорости, и
второй блок вычисления угловой скорости, который вычисляет вторую составляющую угловой скорости вокруг точки, связанной с объектом, на основании выходного сигнала детектора угловой скорости и результата вычисления из первого блока вычисления угловой скорости, и корректирует вторую составляющую угловой скорости на основании положения главной точки,
при этом блок управления осуществляет управление стабилизацией изображения на основании разности между первой составляющей угловой скорости и скорректированной второй составляющей угловой скорости.
первый блок вычисления угловой скорости, который вычисляет первую составляющую угловой скорости вокруг положения главной точки, вычисленного блоком вычисления, на основании выходного сигнала детектора угловой скорости, и
второй блок вычисления угловой скорости, который вычисляет вторую составляющую угловой скорости вокруг точки, связанной с объектом, на основании выходного сигнала детектора угловой скорости и результата вычисления из первого блока вычисления угловой скорости, и корректирует вторую составляющую угловой скорости на основании положения главной точки,
при этом блок управления осуществляет управление стабилизацией изображения на основании разности между первой составляющей угловой скорости и скорректированной второй составляющей угловой скорости.
6. Устройство для захвата изображения, содержащее устройство для стабилизации изображения по п.5.
7. Устройство для стабилизации изображения, содержащее
съемочную оптическую систему, которая осуществляет съемку объекта,
детектор угловой скорости, который обнаруживает угловую скорость, прикладываемую к устройству для стабилизации изображения, и выдает эту угловую скорость,
детектор ускорения, который обнаруживает ускорение, прикладываемое к устройству для стабилизации изображения, и выдает это ускорение, причем детектор ускорения располагается между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии, осуществляемой съемочной оптической системой,
блок вычисления угловой скорости поворота, который вычисляет составляющую угловой скорости поворота вокруг положения главной точки съемочной оптической системы на основании выходного сигнала детектора угловой скорости,
блок вычисления угловой скорости кругового движения, который вычисляет составляющую угловой скорости кругового движения вокруг объекта на основании выходного сигнала детектора ускорения и результата вычисления из блока вычисления угловой скорости поворота, и
блок управления, который осуществляет управление стабилизацией изображения на основании разности между составляющей угловой скорости поворота и составляющей угловой скорости кругового движения.
съемочную оптическую систему, которая осуществляет съемку объекта,
детектор угловой скорости, который обнаруживает угловую скорость, прикладываемую к устройству для стабилизации изображения, и выдает эту угловую скорость,
детектор ускорения, который обнаруживает ускорение, прикладываемое к устройству для стабилизации изображения, и выдает это ускорение, причем детектор ускорения располагается между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии, осуществляемой съемочной оптической системой,
блок вычисления угловой скорости поворота, который вычисляет составляющую угловой скорости поворота вокруг положения главной точки съемочной оптической системы на основании выходного сигнала детектора угловой скорости,
блок вычисления угловой скорости кругового движения, который вычисляет составляющую угловой скорости кругового движения вокруг объекта на основании выходного сигнала детектора ускорения и результата вычисления из блока вычисления угловой скорости поворота, и
блок управления, который осуществляет управление стабилизацией изображения на основании разности между составляющей угловой скорости поворота и составляющей угловой скорости кругового движения.
8. Устройство для стабилизации изображения по п.7,
в котором, когда расстояние между положением главной точки съемочной оптической системы в случае съемки с близкого расстояния и детектором ускорения в направлении оптической оси задано как Xba, расстояние между оптической осью съемочной оптической системы и детектором ускорения в направлении, перпендикулярном оптической оси, задано как Yba, оказывается заданным tg(θba)=Yba/Xba, а составляющая ошибки, включенная в выходной сигнал детектора ускорения, изменяющийся в соответствии с увеличением формирования изображения, обеспечиваемым оптической съемочной системой, определяется как функция f(θba) коэффициента ошибок,
детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы, когда расстояние Yba есть величина постоянная.
в котором, когда расстояние между положением главной точки съемочной оптической системы в случае съемки с близкого расстояния и детектором ускорения в направлении оптической оси задано как Xba, расстояние между оптической осью съемочной оптической системы и детектором ускорения в направлении, перпендикулярном оптической оси, задано как Yba, оказывается заданным tg(θba)=Yba/Xba, а составляющая ошибки, включенная в выходной сигнал детектора ускорения, изменяющийся в соответствии с увеличением формирования изображения, обеспечиваемым оптической съемочной системой, определяется как функция f(θba) коэффициента ошибок,
детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы, когда расстояние Yba есть величина постоянная.
9. Устройство для стабилизации изображения по п.7,
в котором функция f(θba) коэффициента ошибок взвешена посредством частоты съемки устройства для захвата изображения, имеющего съемочную оптическую систему, а детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений взвешенной функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы.
в котором функция f(θba) коэффициента ошибок взвешена посредством частоты съемки устройства для захвата изображения, имеющего съемочную оптическую систему, а детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений взвешенной функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы.
10. Устройство для стабилизации изображения по п.8,
в котором функция f (θba) коэффициента ошибок взвешена посредством эффективной величины перемещения при параллельном движении устройства для стабилизации изображения, а детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений взвешенной функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы.
в котором функция f (θba) коэффициента ошибок взвешена посредством эффективной величины перемещения при параллельном движении устройства для стабилизации изображения, а детектор ускорения размещен в окрестности положения, находящегося на расстоянии Xba, где сумма произведений взвешенной функции f(θba) коэффициента ошибок становится минимальной, между положением главной точки в случае съемки с близкого расстояния и положением главной точки в случае съемки на бесконечном расстоянии съемочной оптической системы.
11. Устройство для стабилизации изображения по п.7, дополнительно содержащее блок вычисления разности поворота и кругового движения, который вычисляет значение разности поворота и кругового движения на основании разности между составляющей угловой скорости поворота и составляющей угловой скорости кругового движения,
при этом блок управления осуществляет управление стабилизацией изображения на основании упомянутого значения разности поворота и кругового движения.
при этом блок управления осуществляет управление стабилизацией изображения на основании упомянутого значения разности поворота и кругового движения.
12. Устройство для стабилизации изображения по п.7, дополнительно содержащее блок вычисления отношения угловых скоростей кругового движения и поворота, который вычисляет отношение угловых скоростей кругового движения и поворота, являющееся отношением составляющей угловой скорости кругового движения к составляющей угловой скорости поворота,
при этом блок вычисления угловой скорости кругового движения вычисляет оценку составляющей угловой скорости кругового движения посредством произведения составляющей угловой скорости поворота, вычисленной в реальном масштабе времени, и отношения угловых скоростей кругового движения и поворота, вычисленного блоком вычисления отношения угловых скоростей кругового движения и поворота.
при этом блок вычисления угловой скорости кругового движения вычисляет оценку составляющей угловой скорости кругового движения посредством произведения составляющей угловой скорости поворота, вычисленной в реальном масштабе времени, и отношения угловых скоростей кругового движения и поворота, вычисленного блоком вычисления отношения угловых скоростей кругового движения и поворота.
13. Устройство для стабилизации изображения по п.12,
в котором блок вычисления отношения угловых скоростей кругового движения и поворота задает отношение угловых скоростей кругового движения и поворота как заданную константу, когда отношение угловых скоростей кругового движения и поворота превышает заранее определенное значение.
в котором блок вычисления отношения угловых скоростей кругового движения и поворота задает отношение угловых скоростей кругового движения и поворота как заданную константу, когда отношение угловых скоростей кругового движения и поворота превышает заранее определенное значение.
14. Устройство для стабилизации изображения по п.12,
в котором блок управления осуществляет управление стабилизацией изображения на основании значения разности поворота и кругового движения, когда отношение угловых скоростей кругового движения и поворота больше, чем заранее определенное значение, и осуществляет управление стабилизацией изображения на основании составляющей угловой скорости поворота, когда отношение угловых скоростей кругового движения и поворота равно упомянутому заранее определенному значению или меньше него.
в котором блок управления осуществляет управление стабилизацией изображения на основании значения разности поворота и кругового движения, когда отношение угловых скоростей кругового движения и поворота больше, чем заранее определенное значение, и осуществляет управление стабилизацией изображения на основании составляющей угловой скорости поворота, когда отношение угловых скоростей кругового движения и поворота равно упомянутому заранее определенному значению или меньше него.
15. Устройство для стабилизации изображения по п.11,
в котором блок управления осуществляет управление стабилизацией изображения на основании значения разности поворота и кругового движения, когда увеличение формирования изображения съемочной оптической системы равно заранее определенному значению или превышает его, и осуществляет управление стабилизацией изображения на основании составляющей угловой скорости поворота, когда увеличение формирования изображения съемочной оптической системы меньше, чем упомянутое заранее определенное значение.
в котором блок управления осуществляет управление стабилизацией изображения на основании значения разности поворота и кругового движения, когда увеличение формирования изображения съемочной оптической системы равно заранее определенному значению или превышает его, и осуществляет управление стабилизацией изображения на основании составляющей угловой скорости поворота, когда увеличение формирования изображения съемочной оптической системы меньше, чем упомянутое заранее определенное значение.
16. Устройство для стабилизации изображения по п.7, дополнительно содержащее
детектор ускорения в направлении оптической оси, который обнаруживает действующую в направлении оптической оси составляющую ускорения, прикладываемого к устройству для стабилизации изображения, и
блок управления коррекцией движения в направлении оптической оси, который корректирует размытость изображения, обуславливаемую действующей в направлении оптической оси составляющей ускорения, прикладываемого к устройству для стабилизации изображения,
при этом блок управления коррекцией движения в направлении оптической оси осуществляет управление коррекцией движения в направлении оптической оси на основании действующей в направлении оптической оси составляющей ускорения.
детектор ускорения в направлении оптической оси, который обнаруживает действующую в направлении оптической оси составляющую ускорения, прикладываемого к устройству для стабилизации изображения, и
блок управления коррекцией движения в направлении оптической оси, который корректирует размытость изображения, обуславливаемую действующей в направлении оптической оси составляющей ускорения, прикладываемого к устройству для стабилизации изображения,
при этом блок управления коррекцией движения в направлении оптической оси осуществляет управление коррекцией движения в направлении оптической оси на основании действующей в направлении оптической оси составляющей ускорения.
17. Устройство для захвата изображения, содержащее устройство для стабилизации изображения по п.7.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-140255 | 2009-06-11 | ||
| JP2009140255A JP4857363B2 (ja) | 2009-06-11 | 2009-06-11 | 像振れ補正装置および撮像装置 |
| PCT/JP2010/057729 WO2010143485A1 (en) | 2009-06-11 | 2010-04-23 | Image stabilization apparatus and image pickup apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012100254A RU2012100254A (ru) | 2013-07-20 |
| RU2498376C2 true RU2498376C2 (ru) | 2013-11-10 |
Family
ID=43308745
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012100254/28A RU2498376C2 (ru) | 2009-06-11 | 2010-04-23 | Устройство для стабилизации изображения и устройство для захвата изображения |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US8711272B2 (ru) |
| EP (1) | EP2440970B1 (ru) |
| JP (1) | JP4857363B2 (ru) |
| KR (1) | KR101287931B1 (ru) |
| CN (1) | CN102804053B (ru) |
| BR (1) | BRPI1013048B1 (ru) |
| RU (1) | RU2498376C2 (ru) |
| WO (1) | WO2010143485A1 (ru) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013017165A (ja) | 2011-06-10 | 2013-01-24 | Panasonic Corp | 撮像装置 |
| GB2508471B (en) * | 2012-11-29 | 2015-10-07 | Cooke Optics Ltd | Camera lens assembly |
| US9563105B1 (en) * | 2013-04-10 | 2017-02-07 | Ic Real Tech Inc. | Screw coupler enabling direct secure fastening between communicating electronic components |
| TW201442512A (zh) * | 2013-04-19 | 2014-11-01 | Hon Hai Prec Ind Co Ltd | 自動對焦設計系統、電子裝置及自動對焦設計方法 |
| JP6023999B2 (ja) * | 2013-04-25 | 2016-11-09 | 多摩川精機株式会社 | 空間安定装置 |
| JP2015034879A (ja) | 2013-08-08 | 2015-02-19 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、レンズ鏡筒、光学機器、並びに撮像装置 |
| JP6410431B2 (ja) * | 2014-01-30 | 2018-10-24 | オリンパス株式会社 | カメラシステム |
| CN104792500B (zh) * | 2015-04-20 | 2017-07-14 | 中国科学院上海光学精密机械研究所 | 光学系统光束指向稳定性的诊断方法 |
| US11202011B2 (en) * | 2016-07-25 | 2021-12-14 | Canon Kabushiki Kaisha | Control apparatus, image capturing apparatus, lens apparatus, image capturing system, control method, and storage medium |
| WO2018070468A1 (ja) * | 2016-10-13 | 2018-04-19 | 富士フイルム株式会社 | ブレ補正装置、撮像装置、及びブレ補正方法 |
| JP7057628B2 (ja) | 2017-01-26 | 2022-04-20 | Omデジタルソリューションズ株式会社 | 撮像装置、及び、その像ぶれ量算出方法 |
| CN110419210B (zh) * | 2017-03-15 | 2021-01-12 | 富士胶片株式会社 | 摄像装置、摄像方法及记录介质 |
| WO2018230316A1 (ja) * | 2017-06-12 | 2018-12-20 | 富士フイルム株式会社 | ブレ検出装置、撮像装置、レンズ装置、撮像装置本体、ブレ検出方法及びブレ検出プログラム |
| JP7086571B2 (ja) * | 2017-11-16 | 2022-06-20 | キヤノン株式会社 | 撮像装置、レンズ装置およびこれらの制御方法 |
| JP6960324B2 (ja) * | 2017-12-19 | 2021-11-05 | 旭化成エレクトロニクス株式会社 | ブレ量算出装置、ブレ量補正装置、撮像装置、方法、およびプログラム |
| CN110731077B (zh) * | 2018-03-23 | 2021-10-01 | 华为技术有限公司 | 视频图像防抖方法和终端 |
| CH716570A2 (de) * | 2019-09-09 | 2021-03-15 | Andre Reber | Verfahren zur Verbesserung der Sehfähigkeit einer sehbehinderten Person mit einer portablen Sehhilfe. |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0579137A2 (en) * | 1992-07-15 | 1994-01-19 | Nikon Corporation | Image-shake correcting apparatus |
| RU2095839C1 (ru) * | 1995-04-12 | 1997-11-10 | Акционерное общество закрытого типа "Наутэк-холдинг" | Устройство стабилизации оптического изображения |
| EP1607792A2 (en) * | 2004-06-15 | 2005-12-21 | Canon Kabushiki Kaisha | Optical apparatus |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3628480A1 (de) * | 1985-08-23 | 1987-03-05 | Canon Kk | Verfahren und vorrichtung zur kompensation einer bewegung eines bildes |
| JPH073514B2 (ja) * | 1985-12-26 | 1995-01-18 | キヤノン株式会社 | 像移動機構 |
| JP3103572B2 (ja) * | 1990-01-16 | 2000-10-30 | オリンパス光学工業株式会社 | カメラ装置 |
| JP3513950B2 (ja) * | 1993-12-14 | 2004-03-31 | 株式会社ニコン | 像振れ補正カメラ |
| JPH07301839A (ja) * | 1994-05-10 | 1995-11-14 | Olympus Optical Co Ltd | カメラの手ブレ補正装置 |
| US5794078A (en) * | 1995-09-11 | 1998-08-11 | Nikon Corporation | Image movement correction of camera |
| US6429895B1 (en) * | 1996-12-27 | 2002-08-06 | Canon Kabushiki Kaisha | Image sensing apparatus and method capable of merging function for obtaining high-precision image by synthesizing images and image stabilization function |
| JPH11249185A (ja) * | 1998-03-04 | 1999-09-17 | Nikon Corp | カメラシステム及び交換レンズ |
| JP2004295027A (ja) | 2003-03-28 | 2004-10-21 | Nikon Corp | ブレ補正装置 |
| JP2006091279A (ja) * | 2004-09-22 | 2006-04-06 | Canon Inc | 光学機器 |
| JP4667052B2 (ja) * | 2005-01-27 | 2011-04-06 | キヤノン株式会社 | 撮像装置並びにそのカメラ本体及び交換レンズ |
| JP2007034141A (ja) * | 2005-07-29 | 2007-02-08 | Olympus Imaging Corp | カメラシステム及びレンズユニット |
| JP4789614B2 (ja) * | 2005-12-26 | 2011-10-12 | キヤノン株式会社 | 防振制御装置およびその制御方法 |
| CN101454715B (zh) * | 2006-05-26 | 2011-03-30 | 日本胜利株式会社 | 图像模糊修正装置 |
| JP4827662B2 (ja) * | 2006-08-31 | 2011-11-30 | Hoya株式会社 | 焦点調節装置を備えたカメラ |
| JP4400611B2 (ja) * | 2006-10-26 | 2010-01-20 | カシオ計算機株式会社 | 撮像装置、ブレ補正方法、およびプログラム |
| JP2009105784A (ja) * | 2007-10-25 | 2009-05-14 | Sony Corp | 撮像装置 |
| JP4876066B2 (ja) * | 2007-12-19 | 2012-02-15 | キヤノン株式会社 | 映像処理装置及び映像処理システム及び映像処理方法及びプログラム |
| JP5430074B2 (ja) * | 2008-04-03 | 2014-02-26 | キヤノン株式会社 | 光学機器およびそれを備えた撮像装置 |
| US8199243B2 (en) * | 2008-04-28 | 2012-06-12 | Panasonic Corporation | Imaging device and camera body |
| KR20100085728A (ko) * | 2009-01-21 | 2010-07-29 | 삼성전자주식회사 | 촬영장치 및 이를 이용한 초점 검출 방법 |
-
2009
- 2009-06-11 JP JP2009140255A patent/JP4857363B2/ja not_active Expired - Fee Related
-
2010
- 2010-04-23 US US13/263,465 patent/US8711272B2/en not_active Expired - Fee Related
- 2010-04-23 RU RU2012100254/28A patent/RU2498376C2/ru not_active IP Right Cessation
- 2010-04-23 WO PCT/JP2010/057729 patent/WO2010143485A1/en active Application Filing
- 2010-04-23 EP EP10786016.5A patent/EP2440970B1/en not_active Not-in-force
- 2010-04-23 KR KR1020127000294A patent/KR101287931B1/ko active IP Right Grant
- 2010-04-23 CN CN201080026072.3A patent/CN102804053B/zh not_active Expired - Fee Related
- 2010-04-23 BR BRPI1013048-9A patent/BRPI1013048B1/pt not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0579137A2 (en) * | 1992-07-15 | 1994-01-19 | Nikon Corporation | Image-shake correcting apparatus |
| RU2095839C1 (ru) * | 1995-04-12 | 1997-11-10 | Акционерное общество закрытого типа "Наутэк-холдинг" | Устройство стабилизации оптического изображения |
| EP1607792A2 (en) * | 2004-06-15 | 2005-12-21 | Canon Kabushiki Kaisha | Optical apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4857363B2 (ja) | 2012-01-18 |
| US20120038783A1 (en) | 2012-02-16 |
| BRPI1013048B1 (pt) | 2020-07-28 |
| CN102804053B (zh) | 2015-06-10 |
| EP2440970A4 (en) | 2012-05-16 |
| WO2010143485A1 (en) | 2010-12-16 |
| BRPI1013048A2 (pt) | 2016-04-05 |
| CN102804053A (zh) | 2012-11-28 |
| JP2010286651A (ja) | 2010-12-24 |
| EP2440970A1 (en) | 2012-04-18 |
| RU2012100254A (ru) | 2013-07-20 |
| US8711272B2 (en) | 2014-04-29 |
| EP2440970B1 (en) | 2013-10-23 |
| KR20120025586A (ko) | 2012-03-15 |
| KR101287931B1 (ko) | 2013-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2498376C2 (ru) | Устройство для стабилизации изображения и устройство для захвата изображения | |
| JP5284169B2 (ja) | 像振れ補正装置およびそれを具備する光学機器、撮像装置 | |
| US8339466B2 (en) | Image stabilization apparatus and image pickup apparatus | |
| US7689107B2 (en) | Anti-shake apparatus | |
| CN100510931C (zh) | 图像捕获设备 | |
| CN102338969B (zh) | 图像模糊校正装置及其控制方法以及摄像设备 | |
| CN102455567A (zh) | 光学装置、图像拍摄装置以及光学装置的控制方法 | |
| JP2004219930A (ja) | 手振れ補正機能付きカメラ | |
| JP2006300997A (ja) | 像振れ防止機能を有する撮像装置 | |
| JP2004295027A (ja) | ブレ補正装置 | |
| JP2010518443A (ja) | 手持ちカメラで安定画像を与える装置 | |
| US6407771B1 (en) | Camera having an image shift detecting function | |
| JP2012128356A (ja) | ブレ補正装置及び光学機器 | |
| JP3588715B2 (ja) | 動き検出装置および画像動き補正装置 | |
| JP2003307762A (ja) | ブレ補正撮影装置 | |
| JP4487487B2 (ja) | ブレ補正装置を備えた撮影装置 | |
| JP6024031B2 (ja) | ブレ補正装置及び光学機器 | |
| JP4951803B2 (ja) | 手振れ補正制御装置、及びそれを備えたカメラボディ、交換レンズ | |
| JPH07301839A (ja) | カメラの手ブレ補正装置 | |
| WO2007023663A1 (ja) | 撮像装置、画像処理プログラム、それが記録された情報記録媒体、画像処理装置、及び画像処理方法 | |
| JP2011221090A (ja) | カメラシステム | |
| JP2000227613A (ja) | 手振れ補正装置 | |
| JP2013162185A (ja) | 光学機器および撮像装置 | |
| CN116801083A (zh) | 控制装置、透镜装置、摄像装置、相机系统、控制方法及存储介质 | |
| JP2011118011A (ja) | 撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20190424 |