KR20220058918A - 기구 이미지 신뢰성 시스템 및 방법 - Google Patents
기구 이미지 신뢰성 시스템 및 방법 Download PDFInfo
- Publication number
- KR20220058918A KR20220058918A KR1020227010429A KR20227010429A KR20220058918A KR 20220058918 A KR20220058918 A KR 20220058918A KR 1020227010429 A KR1020227010429 A KR 1020227010429A KR 20227010429 A KR20227010429 A KR 20227010429A KR 20220058918 A KR20220058918 A KR 20220058918A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- instrument
- metrics
- images
- determining
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 112
- 238000003384 imaging method Methods 0.000 claims abstract description 34
- 238000013442 quality metrics Methods 0.000 claims description 34
- 238000010801 machine learning Methods 0.000 claims description 28
- 230000004044 response Effects 0.000 claims description 11
- 238000004891 communication Methods 0.000 claims description 4
- 238000013527 convolutional neural network Methods 0.000 claims description 4
- 239000011159 matrix material Substances 0.000 claims description 4
- 230000000007 visual effect Effects 0.000 claims description 4
- 239000002131 composite material Substances 0.000 claims description 3
- 238000001914 filtration Methods 0.000 claims description 3
- 238000003325 tomography Methods 0.000 claims description 2
- 238000004422 calculation algorithm Methods 0.000 description 45
- 238000007726 management method Methods 0.000 description 23
- 238000000605 extraction Methods 0.000 description 19
- 238000004458 analytical method Methods 0.000 description 18
- 238000013507 mapping Methods 0.000 description 18
- 238000003780 insertion Methods 0.000 description 16
- 230000037431 insertion Effects 0.000 description 16
- 230000033001 locomotion Effects 0.000 description 16
- 210000002435 tendon Anatomy 0.000 description 16
- 238000013519 translation Methods 0.000 description 16
- 238000013276 bronchoscopy Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 12
- 238000012545 processing Methods 0.000 description 12
- 210000003484 anatomy Anatomy 0.000 description 11
- 239000012636 effector Substances 0.000 description 10
- 210000004072 lung Anatomy 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 10
- 238000005452 bending Methods 0.000 description 9
- 238000001839 endoscopy Methods 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 238000005286 illumination Methods 0.000 description 8
- 238000003860 storage Methods 0.000 description 8
- 210000001015 abdomen Anatomy 0.000 description 6
- 238000013461 design Methods 0.000 description 6
- 239000012530 fluid Substances 0.000 description 6
- 230000001225 therapeutic effect Effects 0.000 description 6
- 210000003708 urethra Anatomy 0.000 description 6
- 238000002591 computed tomography Methods 0.000 description 5
- 230000004927 fusion Effects 0.000 description 5
- 230000002262 irrigation Effects 0.000 description 5
- 238000003973 irrigation Methods 0.000 description 5
- 230000037361 pathway Effects 0.000 description 5
- 210000000707 wrist Anatomy 0.000 description 5
- 230000008901 benefit Effects 0.000 description 4
- 238000001574 biopsy Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000003745 diagnosis Methods 0.000 description 4
- 239000000835 fiber Substances 0.000 description 4
- 210000001503 joint Anatomy 0.000 description 4
- 238000002357 laparoscopic surgery Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 238000001356 surgical procedure Methods 0.000 description 4
- 230000002792 vascular Effects 0.000 description 4
- 210000000683 abdominal cavity Anatomy 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 210000001105 femoral artery Anatomy 0.000 description 3
- 238000002594 fluoroscopy Methods 0.000 description 3
- 230000002496 gastric effect Effects 0.000 description 3
- 210000002414 leg Anatomy 0.000 description 3
- 239000013307 optical fiber Substances 0.000 description 3
- 230000001954 sterilising effect Effects 0.000 description 3
- 238000004659 sterilization and disinfection Methods 0.000 description 3
- 210000000626 ureter Anatomy 0.000 description 3
- 238000012084 abdominal surgery Methods 0.000 description 2
- 210000001367 artery Anatomy 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 210000000621 bronchi Anatomy 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 210000001035 gastrointestinal tract Anatomy 0.000 description 2
- 238000002575 gastroscopy Methods 0.000 description 2
- 210000004013 groin Anatomy 0.000 description 2
- 210000003734 kidney Anatomy 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000005693 optoelectronics Effects 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 1
- 206010073306 Exposure to radiation Diseases 0.000 description 1
- 208000000913 Kidney Calculi Diseases 0.000 description 1
- 206010029148 Nephrolithiasis Diseases 0.000 description 1
- 241001085205 Prenanthella exigua Species 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 210000003815 abdominal wall Anatomy 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000003556 assay Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000002302 brachial artery Anatomy 0.000 description 1
- 210000001715 carotid artery Anatomy 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000003066 decision tree Methods 0.000 description 1
- 238000013135 deep learning Methods 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 239000000032 diagnostic agent Substances 0.000 description 1
- 229940039227 diagnostic agent Drugs 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000002526 effect on cardiovascular system Effects 0.000 description 1
- 210000002310 elbow joint Anatomy 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 210000001624 hip Anatomy 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000036512 infertility Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 238000003064 k means clustering Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 230000003211 malignant effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000002324 minimally invasive surgery Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000002085 persistent effect Effects 0.000 description 1
- 238000013439 planning Methods 0.000 description 1
- 238000000513 principal component analysis Methods 0.000 description 1
- 238000011471 prostatectomy Methods 0.000 description 1
- 230000001012 protector Effects 0.000 description 1
- 238000013139 quantization Methods 0.000 description 1
- 238000007637 random forest analysis Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 229940124597 therapeutic agent Drugs 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
- 230000001131 transforming effect Effects 0.000 description 1
- 238000012384 transportation and delivery Methods 0.000 description 1
- 238000009211 ultrasonic lithotripsy Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
- 210000001635 urinary tract Anatomy 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 210000001835 viscera Anatomy 0.000 description 1
- 238000001429 visible spectrum Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
- A61B5/066—Superposing sensor position on an image of the patient, e.g. obtained by ultrasound or x-ray imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000096—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope using artificial intelligence
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/0002—Operational features of endoscopes provided with data storages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/267—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the respiratory tract, e.g. laryngoscopes, bronchoscopes
- A61B1/2676—Bronchoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
- A61B5/0036—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room including treatment, e.g., using an implantable medical device, ablating, ventilating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7221—Determining signal validity, reliability or quality
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7264—Classification of physiological signals or data, e.g. using neural networks, statistical classifiers, expert systems or fuzzy systems
- A61B5/7267—Classification of physiological signals or data, e.g. using neural networks, statistical classifiers, expert systems or fuzzy systems involving training the classification device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G12/00—Accommodation for nursing, e.g. in hospitals, not covered by groups A61G1/00 - A61G11/00, e.g. trolleys for transport of medicaments or food; Prescription lists
- A61G12/001—Trolleys for transport of medicaments, food, linen, nursing supplies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/0018—Physician's examining tables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/02—Adjustable operating tables; Controls therefor
- A61G13/04—Adjustable operating tables; Controls therefor tiltable around transverse or longitudinal axis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/12—Rests specially adapted therefor; Arrangements of patient-supporting surfaces
- A61G13/1205—Rests specially adapted therefor; Arrangements of patient-supporting surfaces for specific parts of the body
- A61G13/1235—Arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/12—Rests specially adapted therefor; Arrangements of patient-supporting surfaces
- A61G13/1205—Rests specially adapted therefor; Arrangements of patient-supporting surfaces for specific parts of the body
- A61G13/125—Ankles or feet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/12—Rests specially adapted therefor; Arrangements of patient-supporting surfaces
- A61G13/128—Rests specially adapted therefor; Arrangements of patient-supporting surfaces with mechanical surface adaptations
- A61G13/1285—Rests specially adapted therefor; Arrangements of patient-supporting surfaces with mechanical surface adaptations having modular surface parts, e.g. being replaceable or turnable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G13/00—Operating tables; Auxiliary appliances therefor
- A61G13/10—Parts, details or accessories
- A61G13/12—Rests specially adapted therefor; Arrangements of patient-supporting surfaces
- A61G13/128—Rests specially adapted therefor; Arrangements of patient-supporting surfaces with mechanical surface adaptations
- A61G13/129—Rests specially adapted therefor; Arrangements of patient-supporting surfaces with mechanical surface adaptations having surface parts for adaptation of the size, e.g. for extension or reduction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/243—Classification techniques relating to the number of classes
- G06F18/2433—Single-class perspective, e.g. one-against-all classification; Novelty detection; Outlier detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00477—Coupling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00809—Lung operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2059—Mechanical position encoders
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/007—Auxiliary appliance with irrigation system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2505/00—Evaluating, monitoring or diagnosing in the context of a particular type of medical care
- A61B2505/05—Surgical care
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2576/00—Medical imaging apparatus involving image processing or analysis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B46/00—Surgical drapes
- A61B46/10—Surgical drapes specially adapted for instruments, e.g. microscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B50/00—Containers, covers, furniture or holders specially adapted for surgical or diagnostic appliances or instruments, e.g. sterile covers
- A61B50/10—Furniture specially adapted for surgical or diagnostic appliances or instruments
- A61B50/13—Trolleys, e.g. carts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2210/00—Devices for specific treatment or diagnosis
- A61G2210/50—Devices for specific treatment or diagnosis for radiography
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30061—Lung
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Theoretical Computer Science (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Robotics (AREA)
- Multimedia (AREA)
- Pulmonology (AREA)
- Physiology (AREA)
- Signal Processing (AREA)
- Software Systems (AREA)
- Databases & Information Systems (AREA)
- Computing Systems (AREA)
- Data Mining & Analysis (AREA)
- Psychiatry (AREA)
- Otolaryngology (AREA)
- Human Computer Interaction (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Gynecology & Obstetrics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- General Engineering & Computer Science (AREA)
Abstract
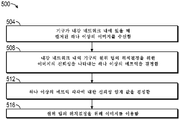
이미지 관리에 관한 시스템 및 방법이 본 명세서에 기술된다. 시스템이 세장형 본체 및 이미징 장치를 포함하는 기구를 포함할 수 있다. 세장형 본체는 내강 네트워크 내로 삽입되도록 구성될 수 있다. 이미징 장치는 세장형 본체의 원위 팁에 위치될 수 있다. 시스템은 이미징 장치로부터, 세장형 본체가 내강 네트워크 내에 있을 때 캡처된 하나 이상의 이미지를 수신할 수 있다. 이미지들 각각에 대해, 시스템은 내강 네트워크 내의 세장형 본체의 원위 팁의 위치결정을 위한 이미지의 신뢰성을 나타내는 하나 이상의 메트릭을 결정할 수 있다. 시스템은 하나 이상의 메트릭들 각각에 대한 신뢰성 임계 값을 결정할 수 있다. 시스템은 하나 이상의 메트릭이 대응하는 신뢰성 임계 값을 충족하는지에 기초하여 하나 이상의 이미지를 이용할 수 있다.
Description
관련 출원(들)의 상호 참조
본 출원은 전체적으로 본 명세서에 참고로 포함되는, 2019년 8월 30일자로 출원된 미국 가출원 제62/894,601호의 이익을 주장한다.
기술분야
본 개시는 일반적으로 의료 기구(medical instrument)의 내비게이션(navigation)을 위한 시스템 및 방법에 관한 것으로, 더 상세하게는 로봇-제어식 의료 기구를 내비게이팅하기 위한 이미지-기반 분석에 관한 것이다.
내시경술(예컨대, 기관지경술)과 같은 의료 절차는 진단 및/또는 치료 목적을 위해 환자의 내강(예컨대, 기도)의 내측에 접근하여 시각화하는 것을 수반할 수 있다. 절차 동안, 내시경과 같은 가요성 튜브형 도구 또는 기구가 환자의 신체 내로 삽입될 수 있다. 일부 경우에, 제2 기구가 내시경을 통해 진단 및/또는 처치를 위해 식별되는 조직 부위로 통과될 수 있다.
기관지경술은 의사가 기관지 및 세기관지와 같은, 환자의 폐 내의 기도의 내측 상태를 검사하도록 허용하는 의료 절차이다. 의료 절차 동안, 기관지경으로 알려진 얇은 가요성 튜브형 도구 또는 기구가 환자의 입 내로 삽입되어 환자의 인후를 따라 그 또는 그녀의 폐 기도 내로, 후속 진단 및/또는 처치를 위해 식별되는 조직 부위를 향해 통과될 수 있다. 기관지경은 조직 부위로의 경로를 제공하는 내부 루멘(interior lumen)("작업 채널(working channel)")을 가질 수 있고, 카테터(catheter) 및 다양한 의료 도구가 작업 채널을 통해 조직 부위로 삽입될 수 있다.
소정 의료 절차에서, 수술 로봇 시스템(surgical robotic system)이 수술 도구의 삽입 및/또는 조작을 제어하는 데 사용될 수 있다. 수술 로봇 시스템은 절차 동안 수술 도구의 위치설정을 제어하는 데 사용되는 조작기 조립체(manipulator assembly)를 포함하는 적어도 하나의 로봇 아암(robotic arm) 또는 다른 기구 위치설정 장치(instrument positioning device)를 포함할 수 있다.
개시된 태양은, 개시된 태양을 제한하지 않고 예시하기 위해 제공되는 첨부 도면과 함께 본 명세서에 후술될 것이며, 여기에서 유사한 명칭은 유사한 요소를 나타낸다.
도 1은 진단 및/또는 치료 기관지경술 절차(들)를 위해 배열된 카트(cart)-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 2는 도 1의 로봇 시스템의 추가의 태양을 도시한 도면.
도 3은 요관경술을 위해 배열된 도 1의 로봇 시스템의 일 실시예를 예시한 도면.
도 4는 혈관 절차를 위해 배열된 도 1의 로봇 시스템의 일 실시예를 예시한 도면.
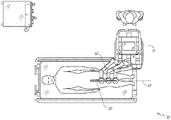
도 5는 기관지경술 절차를 위해 배열된 테이블(table)-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 6은 도 5의 로봇 시스템의 대안적인 도면을 제공한 도면.
도 7은 로봇 아암(들)을 적재하도록(stow) 구성된 예시적인 시스템을 예시한 도면.
도 8은 요관경술 절차를 위해 구성된 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 9는 복강경술 절차를 위해 구성된 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 10은 피치(pitch) 또는 틸트(tilt) 조절을 갖는 도 5 내지 도 9의 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
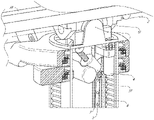
도 11은 도 5 내지 도 10의 테이블-기반 로봇 시스템의 테이블과 칼럼(column) 사이의 인터페이스(interface)의 상세한 예시를 제공한 도면.
도 12는 테이블-기반 로봇 시스템의 대안적인 실시예를 예시한 도면.
도 13은 도 12의 테이블-기반 로봇 시스템의 단부도를 예시한 도면.
도 14는 로봇 아암이 그에 부착된 테이블-기반 로봇 시스템의 단부도를 예시한 도면.
도 15는 예시적인 기구 드라이버(instrument driver)를 예시한 도면.
도 16은 페어링된(paired) 기구 드라이버를 갖는 예시적인 의료 기구를 예시한 도면.
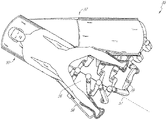
도 17은 구동 유닛의 축이 기구의 세장형 샤프트(elongated shaft)의 축에 평행한 기구 드라이버 및 기구에 대한 대안적인 설계를 예시한 도면.
도 18은 기구-기반 삽입 아키텍처(insertion architecture)를 갖는 기구를 예시한 도면.
도 19는 예시적인 제어기를 예시한 도면.
도 20은 예시적인 실시예에 따른, 도 16 내지 도 18의 기구의 위치와 같은, 도 1 내지 도 10의 로봇 시스템의 하나 이상의 요소의 위치를 추정하는 위치결정 시스템(localization system)을 예시한 블록도를 도시한 도면.
도 21은 환자의 예시적인 내강 네트워크(luminal network)를 예시한 도면.
도 22는 본 명세서에 기술된 로봇 시스템의 일부 구현예와 함께 사용될 수 있는 예시적인 명령 콘솔(command console)을 예시한 도면.
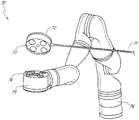
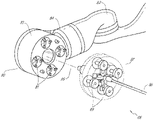
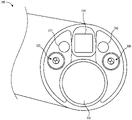
도 23은 예시적인 의료 기구의 원위 단부의 상세도를 예시한 도면.
도 24는 내강 네트워크의 분지부(branch)의 내부의 예시적인 이미지를 제공한 도면.
도 25는 분석 시스템 및 의료 기구를 포함하는 예시적인 이미지 관리 시스템(image management system)을 도시한 도면.
도 26은 본 명세서에 기술된 의료 시스템과 조합하여 사용될 수 있는 매핑 시스템(mapping system)을 도시한 도면.
도 27은 전술된 이미지 관리 시스템을 구현하기 위한 예시적인 방법을 예시한 도면.
도 1은 진단 및/또는 치료 기관지경술 절차(들)를 위해 배열된 카트(cart)-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 2는 도 1의 로봇 시스템의 추가의 태양을 도시한 도면.
도 3은 요관경술을 위해 배열된 도 1의 로봇 시스템의 일 실시예를 예시한 도면.
도 4는 혈관 절차를 위해 배열된 도 1의 로봇 시스템의 일 실시예를 예시한 도면.
도 5는 기관지경술 절차를 위해 배열된 테이블(table)-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 6은 도 5의 로봇 시스템의 대안적인 도면을 제공한 도면.
도 7은 로봇 아암(들)을 적재하도록(stow) 구성된 예시적인 시스템을 예시한 도면.
도 8은 요관경술 절차를 위해 구성된 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 9는 복강경술 절차를 위해 구성된 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 10은 피치(pitch) 또는 틸트(tilt) 조절을 갖는 도 5 내지 도 9의 테이블-기반 로봇 시스템의 일 실시예를 예시한 도면.
도 11은 도 5 내지 도 10의 테이블-기반 로봇 시스템의 테이블과 칼럼(column) 사이의 인터페이스(interface)의 상세한 예시를 제공한 도면.
도 12는 테이블-기반 로봇 시스템의 대안적인 실시예를 예시한 도면.
도 13은 도 12의 테이블-기반 로봇 시스템의 단부도를 예시한 도면.
도 14는 로봇 아암이 그에 부착된 테이블-기반 로봇 시스템의 단부도를 예시한 도면.
도 15는 예시적인 기구 드라이버(instrument driver)를 예시한 도면.
도 16은 페어링된(paired) 기구 드라이버를 갖는 예시적인 의료 기구를 예시한 도면.
도 17은 구동 유닛의 축이 기구의 세장형 샤프트(elongated shaft)의 축에 평행한 기구 드라이버 및 기구에 대한 대안적인 설계를 예시한 도면.
도 18은 기구-기반 삽입 아키텍처(insertion architecture)를 갖는 기구를 예시한 도면.
도 19는 예시적인 제어기를 예시한 도면.
도 20은 예시적인 실시예에 따른, 도 16 내지 도 18의 기구의 위치와 같은, 도 1 내지 도 10의 로봇 시스템의 하나 이상의 요소의 위치를 추정하는 위치결정 시스템(localization system)을 예시한 블록도를 도시한 도면.
도 21은 환자의 예시적인 내강 네트워크(luminal network)를 예시한 도면.
도 22는 본 명세서에 기술된 로봇 시스템의 일부 구현예와 함께 사용될 수 있는 예시적인 명령 콘솔(command console)을 예시한 도면.
도 23은 예시적인 의료 기구의 원위 단부의 상세도를 예시한 도면.
도 24는 내강 네트워크의 분지부(branch)의 내부의 예시적인 이미지를 제공한 도면.
도 25는 분석 시스템 및 의료 기구를 포함하는 예시적인 이미지 관리 시스템(image management system)을 도시한 도면.
도 26은 본 명세서에 기술된 의료 시스템과 조합하여 사용될 수 있는 매핑 시스템(mapping system)을 도시한 도면.
도 27은 전술된 이미지 관리 시스템을 구현하기 위한 예시적인 방법을 예시한 도면.
I. 개요
.
본 개시의 태양은 복강경술과 같은 최소 침습 절차 및 내시경술과 같은 비-침습 절차 둘 모두를 비롯하여 다양한 의료 절차를 수행할 수 있는 로봇식(robotically-enabled) 의료 시스템 내에 통합될 수 있다. 내시경술 절차 중에서, 시스템은 기관지경술, 요관경술, 위내시경술(gastroscopy) 등을 수행하는 것이 가능할 수 있다.
광범위한 절차를 수행하는 것에 더하여, 시스템은 의사를 보조하기 위한 향상된 이미징 및 안내와 같은 추가의 이점을 제공할 수 있다. 추가적으로, 시스템은 다루기 어려운 아암 운동 및 위치에 대한 필요 없이 인체공학적 위치로부터 절차를 수행하는 능력을 의사에게 제공할 수 있다. 더욱이, 시스템은, 시스템의 기구들 중 하나 이상이 단일 사용자에 의해 제어될 수 있도록, 개선된 사용 용이성을 갖고서 절차를 수행하는 능력을 의사에게 제공할 수 있다.
다양한 실시예가 예시의 목적으로 도면과 함께 후술될 것이다. 개시된 개념의 많은 다른 구현예가 가능하고, 개시된 구현예로 다양한 이점이 달성될 수 있다는 것이 인식되어야 한다. 참조를 위해 그리고 다양한 섹션을 찾는 데 도움을 주기 위해 표제가 본 명세서에 포함된다. 이들 표제는 그와 관련하여 기술되는 개념의 범주를 제한하도록 의도되지 않는다. 그러한 개념은 전체 명세서 전반에 걸쳐 적용될 수 있다.
A. 로봇
시스템 - 카트.
로봇식 의료 시스템은 특정 절차에 따라 다양한 방식으로 구성될 수 있다. 도 1은 진단 및/또는 치료 기관지경술 절차를 위해 배열된 카트-기반 로봇식 시스템(10)의 일 실시예를 예시한다. 기관지경술 동안, 시스템(10)은 기관지경술을 위한 절차-특정적 기관지경일 수 있는, 조향가능 내시경(13)과 같은 의료 기구를 진단 및/또는 치료 도구를 전달하기 위한 자연 구멍 접근 지점(natural orifice access point)(즉, 본 예에서 테이블 상에 위치된 환자의 입)으로 전달하기 위한 하나 이상의 로봇 아암(12)을 갖는 카트(11)를 포함할 수 있다. 도시된 바와 같이, 카트(11)는 접근 지점에 대한 접근을 제공하기 위해 환자의 상체에 근접하게 위치될 수 있다. 유사하게, 로봇 아암(12)은 접근 지점에 대해 기관지경을 위치시키도록 작동될 수 있다. 도 1의 배열은 또한, 위장(gastro-intestinal, GI) 절차를 위한 전문화된 내시경인 위내시경으로 GI 절차를 수행할 때 이용될 수 있다. 도 2는 카트의 예시적인 실시예를 더 상세히 도시한다.
계속해서 도 1을 참조하면, 일단 카트(11)가 적절하게 위치되면, 로봇 아암(12)은 조향가능 내시경(13)을 로봇으로, 수동으로, 또는 이들의 조합으로 환자 내로 삽입할 수 있다. 도시된 바와 같이, 조향가능 내시경(13)은 적어도 2개의 삽통 부품(telescoping part), 예컨대 내부 리더(leader) 부분 및 외부 시스(sheath) 부분을 포함할 수 있으며, 각각의 부분은 기구 드라이버들(28)의 세트로부터의 별개의 기구 드라이버에 결합되고, 각각의 기구 드라이버는 개별 로봇 아암의 원위 단부에 결합된다. 리더 부분을 시스 부분과 동축으로 정렬시키는 것을 용이하게 하는, 기구 드라이버(28)의 이러한 선형 배열은 하나 이상의 로봇 아암(12)을 상이한 각도 및/또는 위치로 조작함으로써 공간에서 재위치될 수 있는 "가상 레일(virtual rail)"(29)을 생성한다. 본 명세서에 기술되는 가상 레일은 파선을 사용하여 도면에 도시되어 있으며, 따라서 파선은 시스템의 임의의 물리적 구조를 도시하지 않는다. 가상 레일(29)을 따른 기구 드라이버(28)의 병진은 외부 시스 부분에 대해 내부 리더 부분을 삽통식으로 이동시키거나, 환자로부터 내시경(13)을 전진 또는 후퇴시킨다. 가상 레일(29)의 각도는 임상 적용 또는 의사 선호도에 기초하여 조절, 병진, 및 피봇될(pivoted) 수 있다. 예를 들어, 기관지경술에서, 도시된 바와 같은 가상 레일(29)의 각도 및 위치는 내시경(13)을 환자의 입 안으로 구부림으로써 발생하는 마찰을 최소화하면서 내시경(13)에 대한 의사 접근을 제공하는 것 사이의 절충을 나타낸다.
내시경(13)은 표적 목적지 또는 수술 부위에 도달할 때까지 로봇 시스템으로부터의 정확한 명령을 사용하여 삽입 후 환자의 기관 및 폐를 따라 지향될 수 있다. 환자의 폐 네트워크(lung network)를 통한 내비게이션을 향상시키고/시키거나 원하는 표적에 도달하기 위해, 내시경(13)은 향상된 관절운동 및 더 큰 굽힘 반경을 얻기 위해 외부 시스 부분으로부터 내부 리더 부분을 삽통식으로 연장시키도록 조작될 수 있다. 별개의 기구 드라이버(28)의 사용은 또한 리더 부분과 시스 부분이 서로 독립적으로 구동되도록 허용한다.
예를 들어, 내시경(13)은, 예를 들어 환자의 폐 내의 병변 또는 결절과 같은 표적에 생검 바늘을 전달하도록 지향될 수 있다. 바늘은 병리학자에 의해 분석될 조직 샘플을 얻기 위해 내시경의 길이를 따라 연장되는 작업 채널을 따라 전개될 수 있다. 병리학 결과에 따라, 추가 도구가 추가 생검을 위해 내시경의 작업 채널을 따라 전개될 수 있다. 결절을 악성으로 확인한 후에, 내시경(13)은 잠재적인 암 조직을 절제하기 위한 도구를 내시경으로 전달할 수 있다. 일부 경우에, 진단 및 치료 처치제(treatment)가 별개의 절차로 전달될 수 있다. 그들 상황에서, 내시경(13)은 또한 표적 결절의 위치를 "표시"하기 위한 기준점을 전달하는 데에도 사용될 수 있다. 다른 경우에서, 진단 및 치료 처치제는 동일한 절차 동안 전달될 수 있다.
시스템(10)은 또한 이동가능 타워(tower)(30)를 포함할 수 있으며, 이는 카트(11)에 지원 케이블을 통해 연결되어 카트(11)에 제어부, 전자장치, 유체장치, 광학계, 센서, 및/또는 전력에 대한 지원을 제공할 수 있다. 그러한 기능을 타워(30) 내에 두는 것은 수술 의사 및 그/그녀의 스태프에 의해 더 용이하게 조절 및/또는 재위치될 수 있는 더 작은 형태 인자(form factor)의 카트(11)를 허용한다. 추가적으로, 카트/테이블과 지원 타워(30) 사이의 기능의 분할은 수술실의 어수선함을 감소시키고, 임상 작업흐름의 개선을 용이하게 한다. 카트(11)는 환자 가까이에 위치될 수 있지만, 타워(30)는 절차 동안 방해가 되지 않도록 원격 위치에 적재될 수 있다.
전술된 로봇 시스템을 지원하기 위해, 타워(30)는, 예를 들어 영구 자기 저장 드라이브(persistent magnetic storage drive), 솔리드 스테이트 드라이브(solid state drive) 등과 같은 비-일시적 컴퓨터-판독가능 저장 매체 내에 컴퓨터 프로그램 명령어를 저장하는 컴퓨터-기반 제어 시스템의 구성요소(들)를 포함할 수 있다. 그들 명령어의 실행은, 실행이 타워(30)에서 발생하든 또는 카트(11)에서 발생하든 간에, 전체 시스템 또는 그의 서브-시스템(들)을 제어할 수 있다. 예를 들어, 컴퓨터 시스템의 프로세서에 의해 실행될 때, 명령어는 로봇 시스템의 구성요소로 하여금 관련 캐리지(carriage) 및 아암 마운트(arm mount)를 작동시키고, 로봇 아암을 작동시키고, 의료 기구를 제어하게 할 수 있다. 예를 들어, 제어 신호를 수신하는 것에 응답하여, 로봇 아암의 조인트(joint) 내의 모터는 아암을 소정 자세로 위치시킬 수 있다.
타워(30)는 또한, 내시경(13)을 통해 전개될 수 있는 시스템에 제어된 관주 및 흡인 능력을 제공하기 위해 펌프, 유량계, 밸브 제어부, 및/또는 유체 접근부(fluid access)를 포함할 수 있다. 이들 구성요소는 또한 타워(30)의 컴퓨터 시스템을 사용하여 제어될 수 있다. 일부 실시예에서, 관주 및 흡인 능력은 별개의 케이블(들)을 통해 내시경(13)으로 직접 전달될 수 있다.
타워(30)는 카트(11)에 필터링되고 보호된 전력을 제공하도록 설계되는 전압 및 서지(surge) 보호기를 포함하여, 그에 의해 카트(11) 내에 전력 변압기 및 다른 보조 전력 구성요소를 배치하는 것을 회피하여, 더 작고 더 이동가능한 카트(11)를 생성할 수 있다.
타워(30)는 또한 로봇 시스템(10) 전체에 걸쳐 전개된 센서에 대한 지원 장비를 포함할 수 있다. 예를 들어, 타워(30)는 로봇 시스템(10) 전체에 걸쳐 광학 센서 또는 카메라로부터 수신된 데이터를 검출, 수신, 및 처리하기 위한 광전자 장비를 포함할 수 있다. 제어 시스템과 조합하여, 그러한 광전자 장비는 타워(30) 내를 비롯하여, 시스템 전체에 걸쳐 전개된 임의의 수의 콘솔에 디스플레이하기 위한 실시간 이미지를 생성하는 데 사용될 수 있다. 유사하게, 타워(30)는 또한 전개된 전자기(electromagnetic, EM) 센서로부터 수신되는 신호를 수신하고 처리하기 위한 전자 서브시스템을 포함할 수 있다. 타워(30)는 또한 의료 기구 내의 또는 그 상의 EM 센서에 의한 검출을 위한 EM 필드 발생기(field generator)를 수용하고 위치시키는 데 사용될 수 있다.
타워(30)는 또한 시스템의 나머지 부분에서 이용가능한 다른 콘솔, 예컨대 카트의 상부에 장착된 콘솔에 더하여 콘솔(31)을 포함할 수 있다. 콘솔(31)은 의사 조작자를 위한 사용자 인터페이스 및 디스플레이 스크린, 예컨대 터치스크린을 포함할 수 있다. 시스템(10) 내의 콘솔은 일반적으로 로봇 제어뿐만 아니라 절차의 수술전 및 실시간 정보, 예컨대 내시경(13)의 내비게이션 및 위치결정 정보 둘 모두를 제공하도록 설계된다. 콘솔(31)이 의사가 이용가능한 유일한 콘솔이 아닐 때, 그것은 간호사와 같은 제2 조작자에 의해, 환자의 건강 또는 바이탈(vital) 및 시스템(10)의 작동을 모니터링할 뿐만 아니라, 내비게이션 및 위치결정 정보와 같은 절차-특정적 데이터를 제공하는 데 사용될 수 있다. 다른 실시예에서, 콘솔(30)은 타워(30)와 별개인 본체 내에 수용된다.
타워(30)는 하나 이상의 케이블 또는 연결부(도시되지 않음)를 통해 카트(11) 및 내시경(13)에 결합될 수 있다. 일부 실시예에서, 타워(30)로부터의 지원 기능은 단일 케이블을 통해 카트(11)에 제공되어, 수술실을 간소화하고 정리할 수 있다. 다른 실시예에서, 특정 기능은 별개의 케이블류(cabling) 및 연결부로 결합될 수 있다. 예를 들어, 전력은 단일 전력 케이블을 통해 카트(11)에 제공될 수 있지만, 제어부, 광학계, 유체장치, 및/또는 내비게이션에 대한 지원은 별개의 케이블을 통해 제공될 수 있다.
도 2는 도 1에 도시된 카트-기반 로봇식 시스템으로부터의 카트(11)의 일 실시예의 상세한 예시를 제공한다. 카트(11)는 일반적으로 세장형 지지 구조물(14)(흔히 "칼럼"으로 지칭됨), 카트 기부(15), 및 칼럼(14)의 상부에 있는 콘솔(16)을 포함한다. 칼럼(14)은 하나 이상의 로봇 아암(12)(3개가 도 2에 도시됨)의 전개를 지원하기 위한 캐리지(17)(대안적으로 "아암 지지부")와 같은 하나 이상의 캐리지를 포함할 수 있다. 캐리지(17)는 환자에 대한 더 양호한 위치설정을 위해 로봇 아암(12)의 기부를 조절하도록 수직 축을 따라 회전하는 개별적으로 구성가능한 아암 마운트를 포함할 수 있다. 캐리지(17)는 또한 캐리지(17)가 칼럼(14)을 따라 수직으로 병진하도록 허용하는 캐리지 인터페이스(19)를 포함한다.
캐리지 인터페이스(19)는 캐리지(17)의 수직 병진을 안내하기 위해 칼럼(14)의 서로 반대편에 있는 측부들 상에 위치되는, 슬롯(slot)(20)과 같은 슬롯을 통해 칼럼(14)에 연결된다. 슬롯(20)은 캐리지(17)를 카트 기부(15)에 대해 다양한 수직 높이에 위치시키고 유지시키기 위한 수직 병진 인터페이스를 포함한다. 캐리지(17)의 수직 병진은 카트(11)가 로봇 아암(12)의 도달범위를 조절하여 다양한 테이블 높이, 환자 크기, 및 의사 선호도를 충족시키도록 허용한다. 유사하게, 캐리지(17) 상의 개별적으로 구성가능한 아암 마운트는 로봇 아암(12)의 로봇 아암 기부(21)가 다양한 구성으로 경사지도록 허용한다.
일부 실시예에서, 슬롯(20)은 캐리지(17)가 수직으로 병진함에 따라 수직 병진 인터페이스 및 칼럼(14)의 내부 챔버 내로 먼지 및 유체가 유입되는 것을 방지하기 위해 슬롯 표면과 동일 평면상에 있고 그에 평행한 슬롯 커버로 보완될 수 있다. 슬롯 커버는 슬롯(20)의 수직 상부 및 저부 부근에 위치된 스프링 스풀(spring spool)들의 쌍을 통해 전개될 수 있다. 커버는 캐리지(17)가 상향 및 하향으로 수직으로 병진함에 따라 그들의 코일링된(coiled) 상태로부터 연장 및 후퇴되도록 전개될 때까지 스풀 내에 코일링된다. 스풀의 스프링-로딩(spring-loading)은 캐리지(17)가 스풀을 향해 병진할 때 커버를 스풀 내로 후퇴시키는 힘을 제공함과 동시에, 또한 캐리지(17)가 스풀로부터 멀어지게 병진할 때 밀폐 시일(tight seal)을 유지시킨다. 커버는 캐리지(17)가 병진함에 따라 커버의 적절한 연장 및 후퇴를 보장하기 위해, 예를 들어 캐리지 인터페이스(19) 내의 브래킷(bracket)을 사용하여 캐리지(17)에 연결될 수 있다.
칼럼(14)은 내부적으로, 사용자 입력, 예컨대 콘솔(16)로부터의 입력에 응답하여 생성된 제어 신호에 응답하여 기계화된 방식으로 캐리지(17)를 병진시키기 위해 수직으로 정렬된 리드 스크류(lead screw)를 사용하도록 설계되는, 기어 및 모터와 같은 메커니즘을 포함할 수 있다.
로봇 아암(12)은 일반적으로, 일련의 조인트(24)에 의해 연결되는 일련의 링크장치(linkage)(23)에 의해 분리되는 로봇 아암 기부(21) 및 엔드 이펙터(end effector)(22)를 포함할 수 있으며, 각각의 조인트는 독립적인 액추에이터(actuator)를 포함하고, 각각의 액추에이터는 독립적으로 제어가능한 모터를 포함한다. 각각의 독립적으로 제어가능한 조인트는 로봇 아암(12)이 이용가능한 독립적인 자유도(degree of freedom)를 나타낸다. 로봇 아암들(12) 각각은 7개의 조인트를 가질 수 있고, 따라서 7 자유도를 제공할 수 있다. 다수의 조인트는 다수의 자유도를 생성하여, "여분의(redundant)" 자유도를 허용한다. 여분의 자유도를 갖는 것은 로봇 아암(12)이 상이한 링크장치 위치 및 조인트 각도를 사용하여 공간에서 특정 위치, 배향, 및 궤적으로 그들 각각의 엔드 이펙터(22)를 위치시키도록 허용한다. 이는 시스템이 의료 기구를 공간에서 원하는 지점으로부터 위치시키고 지향시키도록 허용함과 동시에, 의사가 아암 충돌을 회피하면서 더 우수한 접근을 생성하기 위해 아암 조인트를 환자로부터 떨어진 임상적으로 유리한 위치로 이동시키도록 허용한다.
카트 기부(15)는 바닥 위에서 칼럼(14), 캐리지(17), 및 로봇 아암(12)의 중량의 균형을 잡는다. 따라서, 카트 기부(15)는 전자장치, 모터, 전력 공급부와 같은 더 무거운 구성요소뿐만 아니라, 이동을 가능하게 하고/하거나 카트(11)를 움직이지 못하게 하는 구성요소를 수용한다. 예를 들어, 카트 기부(15)는 절차 전에 카트(11)가 수술실을 용이하게 돌아다니도록 허용하는 롤링가능 휠(rollable wheel)-형상의 캐스터(caster)(25)를 포함한다. 적절한 위치에 도달한 후에, 캐스터(25)는 절차 동안 카트(11)를 제위치로 유지시키기 위해 휠 로크(wheel lock)를 사용하여 움직이지 못하게 될 수 있다.
칼럼(14)의 수직 단부에 위치되어, 콘솔(16)은 사용자 입력을 수신하기 위한 사용자 인터페이스, 및 수술전 데이터 및 수술중 데이터 둘 모두를 의사 사용자에게 제공하기 위한 디스플레이 스크린 둘 모두(또는 예를 들어 터치스크린(26)과 같은 이중-목적 장치)를 허용한다. 터치스크린(26) 상의 잠재적인 수술전 데이터는 수술전 계획, 수술전 컴퓨터 단층촬영(computerized tomography, CT) 스캔으로부터 도출된 내비게이션 및 매핑 데이터(mapping data), 및/또는 수술전 환자 인터뷰로부터의 기록을 포함할 수 있다. 디스플레이 상의 수술중 데이터는 도구로부터 제공되는 광학 정보, 센서로부터의 센서 및 좌표 정보뿐만 아니라, 호흡, 심박수, 및/또는 맥박과 같은 바이탈 환자 통계치를 포함할 수 있다. 콘솔(16)은 의사가 캐리지(17) 반대편에 있는 칼럼(14)의 측부로부터 콘솔(16)에 접근하게 허용하도록 위치되고 틸팅될 수 있다. 이러한 위치로부터, 의사는 카트(11) 뒤로부터 콘솔(16)을 작동시키면서 콘솔(16), 로봇 아암(12), 및 환자를 관찰할 수 있다. 도시된 바와 같이, 콘솔(16)은 또한 카트(11)를 조작하고 안정시키는 것을 보조하기 위한 손잡이(27)를 포함한다.
도 3은 요관경술을 위해 배열된 로봇식 시스템(10)의 일 실시예를 예시한다. 요관경술 절차에서, 카트(11)는 환자의 요도 및 요관을 통과하도록 설계된 절차-특정적 내시경인 요관경(32)을 환자의 하복부 영역으로 전달하도록 위치될 수 있다. 요관경술에서, 요관경(32)이 환자의 요도와 직접 정렬되어 그러한 영역 내의 민감한 해부학적 구조에 대한 마찰과 힘을 감소시키는 것이 바람직할 수 있다. 도시된 바와 같이, 카트(11)는 로봇 아암(12)이 환자의 요도에 대한 직접적인 선형 접근을 위해 요관경(32)을 위치시키게 허용하도록 테이블의 풋(foot)에 정렬될 수 있다. 테이블의 풋으로부터, 로봇 아암(12)은 요관경(32)을 가상 레일(33)을 따라 요도를 통해 환자의 하복부 내로 직접 삽입할 수 있다.
요도 내로의 삽입 후에, 기관지경술에서와 유사한 제어 기법을 사용하여, 요관경(32)은 진단 및/또는 치료 응용을 위해 방광, 요관, 및/또는 신장 내로 내비게이팅될 수 있다. 예를 들어, 요관경(32)은 요관경(32)의 작업 채널을 따라 전개된 레이저 또는 초음파 쇄석술 장치를 사용하여 신장 결석 축적물을 부수기 위해 요관 및 신장 내로 지향될 수 있다. 쇄석술이 완료된 후에, 생성된 결석 파편은 요관경(32)을 따라 전개된 바스켓(basket)을 사용하여 제거될 수 있다.
도 4는 혈관 절차를 위해 유사하게 배열된 로봇식 시스템(10)의 일 실시예를 예시한다. 혈관 절차에서, 시스템(10)은 카트(11)가 조향가능 카테터와 같은 의료 기구(34)를 환자의 다리 내의 대퇴 동맥 내의 접근 지점으로 전달할 수 있도록 구성될 수 있다. 대퇴 동맥은 내비게이션을 위한 더 큰 직경뿐만 아니라 환자의 심장으로의 상대적으로 덜 우회하고 사행형인 경로 둘 모두를 나타내며, 이는 내비게이션을 단순화한다. 요관경술 절차에서와 같이, 카트(11)는 로봇 아암(12)이 환자의 대퇴부/둔부 영역 내의 대퇴 동맥 접근 지점에 대한 직접적인 선형 접근을 갖는 가상 레일(35)을 제공하게 허용하도록 환자의 다리 및 하복부를 향해 위치될 수 있다. 동맥 내로의 삽입 후에, 의료 기구(34)는 기구 드라이버(28)를 병진시킴으로써 지향되고 삽입될 수 있다. 대안적으로, 카트(11)는, 예를 들어 어깨 및 손목 부근의 경동맥 및 상완 동맥과 같은 대안적인 혈관 접근 지점에 도달하기 위해 환자의 상복부 주위에 위치될 수 있다.
B. 로봇
시스템 - 테이블.
로봇식 의료 시스템의 실시예는 또한 환자의 테이블을 통합할 수 있다. 테이블의 통합은 카트를 제거함으로써 수술실 내의 자본 장비의 양을 감소시키며, 이는 환자에 대한 더 우수한 접근을 허용한다. 도 5는 기관지경술 절차를 위해 배열된 그러한 로봇식 시스템의 일 실시예를 예시한다. 시스템(36)은 바닥 위에서 플랫폼(platform)(38)("테이블" 또는 "베드(bed)"로 도시됨)을 지지하기 위한 지지 구조물 또는 칼럼(37)을 포함한다. 카트-기반 시스템에서와 매우 유사하게, 시스템(36)의 로봇 아암(39)의 엔드 이펙터는 기구 드라이버(42)를 포함하며, 이는 도 5의 기관지경(40)과 같은 세장형 의료 기구를 기구 드라이버(42)의 선형 정렬로부터 형성된 가상 레일(41)을 통해 또는 그를 따라 조작하도록 설계된다. 실제로, 형광투시 이미징(fluoroscopic imaging)을 제공하기 위한 C-아암이 방출기(emitter) 및 검출기(detector)를 테이블(38) 주위에 배치함으로써 환자의 상복부 영역 위에 위치될 수 있다.
도 6은 논의 목적을 위해 환자 및 의료 기구가 없는 시스템(36)의 대안적인 도면을 제공한다. 도시된 바와 같이, 칼럼(37)은 시스템(36) 내에 링(ring)-형상으로 도시된 하나 이상의 캐리지(43)를 포함할 수 있으며, 하나 이상의 로봇 아암(39)이 그로부터 기초할 수 있다. 캐리지(43)는 로봇 아암(39)이 그로부터 환자에게 도달하도록 위치될 수 있는 상이한 유리한 지점을 제공하기 위해 칼럼(37)의 길이를 따라 연장되는 수직 칼럼 인터페이스(44)를 따라 병진할 수 있다. 캐리지(들)(43)는, 로봇 아암(39)이 예를 들어 환자의 양쪽 측부와 같은 테이블(38)의 다수의 측부에 접근할 수 있도록 허용하기 위해, 칼럼(37) 내에 위치된 기계식 모터를 사용하여 칼럼(37)을 중심으로 회전할 수 있다. 다수의 캐리지를 갖는 실시예에서, 캐리지는 칼럼 상에 개별적으로 위치될 수 있고, 다른 캐리지와 독립적으로 병진 및/또는 회전할 수 있다. 캐리지(43)가 칼럼(37)을 둘러싸거나 심지어 원형일 필요는 없지만, 도시된 바와 같은 링-형상은 구조적 균형을 유지시키면서 칼럼(37)을 중심으로 하는 캐리지(43)의 회전을 용이하게 한다. 캐리지(43)의 회전 및 병진은 시스템(36)이 내시경 및 복강경과 같은 의료 기구를 환자 상의 상이한 접근 지점으로 정렬시키도록 허용한다. (도시되지 않은) 다른 실시예에서, 시스템(36)은 그 옆으로 연장되는 바아(bar) 또는 레일 형태의 조절가능 아암 지지부(adjustable arm support)를 갖는 환자 테이블 또는 베드를 포함할 수 있다. 하나 이상의 로봇 아암(39)은 (예컨대, 엘보우 조인트(elbow joint)를 갖는 쇼울더(shoulder)를 통해) 조절가능 아암 지지부에 부착될 수 있고, 이는 수직으로 조절될 수 있다. 수직 조절을 제공함으로써, 로봇 아암(39)은 유리하게는 환자 테이블 또는 베드 아래에 콤팩트하게 적재되고, 후속하여 절차 동안 상승될 수 있다.
로봇 아암(39)은 로봇 아암(39)에 추가의 구성가능성(configurability)을 제공하기 위해 개별적으로 회전하고/하거나 삽통식으로 연장될 수 있는 일련의 조인트를 포함하는 아암 마운트들(45)의 세트를 통해 캐리지(43) 상에 장착될 수 있다. 추가적으로, 아암 마운트(45)는, 캐리지(43)가 적절하게 회전될 때, 아암 마운트(45)가 (도 6에 도시된 바와 같이) 테이블(38)의 동일한 측부 상에, (도 9에 도시된 바와 같이) 테이블(38)의 서로 반대편에 있는 측부들 상에, 또는 테이블(38)의 인접한 측부들 상에(도시되지 않음) 위치될 수 있도록 캐리지(43) 상에 위치될 수 있다.
칼럼(37)은 테이블(38)에 대한 지지, 및 캐리지(43)의 수직 병진을 위한 경로를 구조적으로 제공한다. 내부적으로, 칼럼(37)은 캐리지(43)의 수직 병진을 안내하기 위한 리드 스크류, 및 리드 스크류에 기초하여 캐리지(43)의 병진을 기계화하기 위한 모터를 구비할 수 있다. 칼럼(37)은 또한 캐리지(43) 및 그 상에 장착된 로봇 아암(39)에 전력 및 제어 신호를 전달할 수 있다.
테이블 기부(46)는 도 2에 도시된 카트(11) 내의 카트 기부(15)와 유사한 기능을 하여, 테이블/베드(38), 칼럼(37), 캐리지(43), 및 로봇 아암(39)의 균형을 잡기 위해 더 무거운 구성요소를 수용한다. 테이블 기부(46)는 또한 절차 동안 안정성을 제공하기 위해 강성 캐스터를 통합할 수 있다. 테이블 기부(46)의 저부로부터 전개되어, 캐스터는 기부(46)의 양쪽 측부 상에서 반대 방향들로 연장될 수 있고, 시스템(36)이 이동될 필요가 있을 때 후퇴될 수 있다.
계속해서 도 6을 참조하면, 시스템(36)은 또한 타워(도시되지 않음)를 포함할 수 있으며, 이는 테이블의 형태 인자 및 부피(bulk)를 감소시키기 위해 시스템(36)의 기능을 테이블과 타워 사이에서 분할한다. 이전에 개시된 실시예에서와 같이, 타워는 처리, 컴퓨팅, 및 제어 능력, 전력, 유체장치, 및/또는 광학 및 센서 처리와 같은 다양한 지원 기능을 테이블에 제공할 수 있다. 타워는 또한, 의사 접근을 개선하고 수술실을 정리하기 위해 환자로부터 멀리 위치되도록 이동가능할 수 있다. 추가적으로, 타워 내에 구성요소를 배치하는 것은 로봇 아암(39)의 잠재적인 적재를 위한, 테이블 기부(46) 내의 더 많은 보관 공간을 허용한다. 타워는 또한, 키보드 및/또는 펜던트(pendant)와 같은, 사용자 입력을 위한 사용자 인터페이스뿐만 아니라, 실시간 이미징, 내비게이션, 및 추적 정보와 같은 수술전 및 수술중 정보를 위한 디스플레이 스크린(또는 터치스크린) 둘 모두를 제공하는 마스터 제어기(master controller) 또는 콘솔을 포함할 수 있다. 일부 실시예에서, 타워는 또한 흡입법(insufflation)을 위해 사용될 가스 탱크를 위한 홀더를 포함할 수 있다.
일부 실시예에서, 테이블 기부는 사용하지 않을 때 로봇 아암을 적재 및 보관할 수 있다. 도 7은 테이블-기반 시스템의 일 실시예에서 로봇 아암을 적재하는 시스템(47)을 예시한다. 시스템(47)에서, 캐리지(48)는 로봇 아암(50), 아암 마운트(51), 및 캐리지(48)를 기부(49) 내에 적재하기 위해 기부(49) 내로 수직으로 병진될 수 있다. 기부 커버(52)는 병진 및 후퇴되어 개방되어 캐리지(48), 아암 마운트(51), 및 로봇 아암(50)을 칼럼(53) 주위로 전개시킬 수 있고, 사용하지 않을 때 그들을 적재하여 보호하기 위해 폐쇄될 수 있다. 기부 커버(52)는 그의 개구의 에지를 따라 멤브레인(membrane)(54)으로 밀봉되어, 폐쇄될 때 먼지 및 유체 유입을 방지할 수 있다.
도 8은 요관경술 절차를 위해 구성된 로봇식 테이블-기반 시스템의 일 실시예를 예시한다. 요관경술에서, 테이블(38)은 환자를 칼럼(37) 및 테이블 기부(46)로부터 벗어난 각도로 위치시키기 위한 스위블 부분(swivel portion)(55)을 포함할 수 있다. 스위블 부분(55)은 스위블 부분(55)의 저부 부분을 칼럼(37)으로부터 멀리 위치시키기 위해 피봇 지점(예컨대, 환자의 머리 아래에 위치됨)을 중심으로 회전 또는 피봇할 수 있다. 예를 들어, 스위블 부분(55)의 피봇팅(pivoting)은 C-아암(도시되지 않음)이 테이블(38) 아래의 칼럼(도시되지 않음)과 공간을 경합함이 없이 환자의 하복부 위에 위치되도록 허용한다. 캐리지(35)(도시되지 않음)를 칼럼(37)을 중심으로 회전시킴으로써, 로봇 아암(39)은 요관경(56)을 가상 레일(57)을 따라 환자의 서혜부 영역 내로 직접 삽입하여 요도에 도달하게 할 수 있다. 요관경술에서, 스터럽(stirrup)(58)이 또한 테이블(38)의 스위블 부분(55)에 고정되어, 절차 동안 환자의 다리의 위치를 지지하고 환자의 서혜부 영역에 대한 명확한 접근을 허용할 수 있다.
복강경술 절차에서, 환자의 복벽 내의 작은 절개부(들)를 통해, 최소 침습 기구가 환자의 해부학적 구조 내로 삽입될 수 있다. 일부 실시예에서, 최소 침습 기구는 환자 내의 해부학적 구조에 접근하는 데 사용되는, 샤프트와 같은 세장형 강성 부재를 포함한다. 환자의 복강의 팽창 후에, 기구는 파지, 절단, 절제, 봉합 등과 같은 수술 또는 의료 작업을 수행하도록 지향될 수 있다. 일부 실시예에서, 기구는 복강경과 같은 스코프(scope)를 포함할 수 있다. 도 9는 복강경술 절차를 위해 구성된 로봇식 테이블-기반 시스템의 일 실시예를 예시한다. 도시된 바와 같이, 시스템(36)의 캐리지(43)는 로봇 아암들(39)의 쌍을 테이블(38)의 서로 반대편에 있는 측부들 상에 위치시키도록 회전되고 수직으로 조절될 수 있어서, 기구(59)가 환자의 양쪽 측부 상의 최소 절개부로 통과되어 그/그녀의 복강에 도달하도록 아암 마운트(45)를 사용하여 위치될 수 있게 한다.
복강경술 절차를 수용하기 위해, 로봇식 테이블 시스템은 또한 플랫폼을 원하는 각도로 틸팅되게 할 수 있다. 도 10은 피치 또는 틸트 조절을 갖는 로봇식 의료 시스템의 일 실시예를 예시한다. 도 10에 도시된 바와 같이, 시스템(36)은 테이블(38)의 틸트를 수용하여, 테이블의 하나의 부분을 다른 부분보다 바닥으로부터 더 큰 거리를 두고 위치시킬 수 있다. 추가적으로, 아암 마운트(45)는 틸트와 일치하도록 회전할 수 있어서, 로봇 아암(39)이 테이블(38)과 동일한 평면 관계를 유지시키게 한다. 더 급격한 각도를 수용하기 위해, 칼럼(37)은 또한, 칼럼(37)의 수직 연장이 테이블(38)이 바닥에 닿거나 테이블 기부(46)와 충돌하지 않게 하도록 허용하는 삽통 부분(60)을 포함할 수 있다.
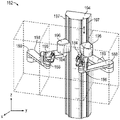
도 11은 테이블(38)과 칼럼(37) 사이의 인터페이스의 상세한 예시를 제공한다. 피치 회전 메커니즘(61)은 다중 자유도로 칼럼(37)에 대한 테이블(38)의 피치 각도를 변경하도록 구성될 수 있다. 피치 회전 메커니즘(61)은 칼럼-테이블 인터페이스에서의 직교 축(1, 2)의 위치설정에 의해 가능해질 수 있으며, 각각의 축은 전기 피치 각도 명령에 응답하여 별개의 모터(3, 4)에 의해 작동된다. 하나의 스크류(5)를 따른 회전은 하나의 축(1)에서의 틸트 조절을 가능하게 할 것인 한편, 다른 하나의 스크류(6)를 따른 회전은 다른 하나의 축(2)을 따른 틸트 조절을 가능하게 할 것이다. 일부 실시예에서, 볼 조인트(ball joint)가 다중 자유도로 칼럼(37)에 대한 테이블(38)의 피치 각도를 변경하도록 사용될 수 있다.
예를 들어, 피치 조절은, 하복부 수술을 위해, 테이블을 트렌델렌부르크 자세(Trendelenburg position)로 위치시키려고 할 때, 즉 환자의 하복부를 환자의 상복부보다 바닥으로부터 더 높은 위치에 위치시키려고 할 때 특히 유용하다. 트렌델렌부르크 자세는 환자의 내부 장기가 중력을 통해 그/그녀의 상복부를 향해 미끄러지게 하여, 최소 침습 도구가 들어가서 복강경 전립선절제술과 같은 하복부 수술 또는 의료 절차를 수행할 복강을 비운다.
도 12 및 도 13은 테이블-기반 수술 로봇 시스템(100)의 대안적인 실시예의 등각도 및 단부도를 예시한다. 수술 로봇 시스템(100)은 테이블(101)에 대해 하나 이상의 로봇 아암(예를 들어, 도 14 참조)을 지지하도록 구성될 수 있는 하나 이상의 조절가능 아암 지지부(105)를 포함한다. 예시된 실시예에서, 단일 조절가능 아암 지지부(105)가 도시되어 있지만, 추가 아암 지지부가 테이블(101)의 반대편 측부 상에 제공될 수 있다. 조절가능 아암 지지부(105)는 그것이 테이블(101)에 대한 조절가능 아암 지지부(105) 및/또는 그에 장착된 임의의 로봇 아암의 위치를 조절 및/또는 변경하기 위해 테이블(101)에 대해 이동할 수 있도록 구성될 수 있다. 예를 들어, 조절가능 아암 지지부(105)는 1 이상의 자유도로 테이블(101)에 대해 조절될 수 있다. 조절가능 아암 지지부(105)는, 하나 이상의 조절가능 아암 지지부(105) 및 그에 부착된 임의의 로봇 아암을 테이블(101) 아래에 용이하게 적재하는 능력을 포함하는, 시스템(100)에 대한 높은 다용도성을 제공한다. 조절가능 아암 지지부(105)는 적재된 위치로부터 테이블(101)의 상부 표면 아래의 위치로 상승될 수 있다. 다른 실시예에서, 조절가능 아암 지지부(105)는 적재된 위치로부터 테이블(101)의 상부 표면 위의 위치로 상승될 수 있다.
조절가능 아암 지지부(105)는 리프트(lift), 측방향 병진, 틸트 등을 포함하는 여러 자유도를 제공할 수 있다. 도 12 및 도 13의 예시된 실시예에서, 아암 지지부(105)는 도 12에 화살표로 예시된 4 자유도로 구성된다. 제1 자유도는 z-방향으로의 조절가능 아암 지지부(105)의 조절("Z-리프트")을 허용한다. 예를 들어, 조절가능 아암 지지부(105)는 테이블(101)을 지지하는 칼럼(102)을 따라 또는 그에 대해 상향 또는 하향으로 이동하도록 구성되는 캐리지(109)를 포함할 수 있다. 제2 자유도는 조절가능 아암 지지부(105)가 틸팅하도록 허용할 수 있다. 예를 들어, 조절가능 아암 지지부(105)는 조절가능 아암 지지부(105)가 트렌델렌부르크 자세에서 베드와 정렬되도록 허용할 수 있는 회전 조인트를 포함할 수 있다. 제3 자유도는 조절가능 아암 지지부(105)가 "상향 피봇(pivot up)"하도록 허용할 수 있으며, 이는 테이블(101)의 측부와 조절가능 아암 지지부(105) 사이의 거리를 조절하는 데 사용될 수 있다. 제4 자유도는 테이블의 길이방향 길이를 따른 조절가능 아암 지지부(105)의 병진을 허용할 수 있다.
도 12 및 도 13의 수술 로봇 시스템(100)은 기부(103)에 장착된 칼럼(102)에 의해 지지되는 테이블을 포함할 수 있다. 기부(103) 및 칼럼(102)은 지지 표면에 대해 테이블(101)을 지지한다. 바닥 축(131) 및 지지 축(133)이 도 13에 도시되어 있다.
조절가능 아암 지지부(105)는 칼럼(102)에 장착될 수 있다. 다른 실시예에서, 아암 지지부(105)는 테이블(101) 또는 기부(103)에 장착될 수 있다. 조절가능 아암 지지부(105)는 캐리지(109), 바아 또는 레일 커넥터(111), 및 바아 또는 레일(107)을 포함할 수 있다. 일부 실시예에서, 레일(107)에 장착된 하나 이상의 로봇 아암은 서로에 대해 병진 및 이동할 수 있다.
캐리지(109)는 제1 조인트(113)에 의해 칼럼(102)에 부착될 수 있으며, 이는 캐리지(109)가 (예컨대, 제1 또는 수직 축(123)의 상향 및 하향으로와 같이) 칼럼(102)에 대해 이동하도록 허용한다. 제1 조인트(113)는 조절가능 아암 지지부(105)에 제1 자유도("Z-리프트")를 제공할 수 있다. 조절가능 아암 지지부(105)는 조절가능 아암 지지부(105)에 대한 제2 자유도(틸트)를 제공하는 제2 조인트(115)를 포함할 수 있다. 조절가능 아암 지지부(105)는 조절가능 아암 지지부(105)에 대한 제3 자유도("상향 피봇")를 제공할 수 있는 제3 조인트(117)를 포함할 수 있다. 레일 커넥터(111)가 제3 축(127)을 중심으로 회전됨에 따라 레일(107)의 배향을 유지시키기 위해 제3 조인트(117)를 기계적으로 구속하는 (도 13에 도시된) 추가 조인트(119)가 제공될 수 있다. 조절가능 아암 지지부(105)는 제4 축(129)을 따라 조절가능 아암 지지부(105)에 대한 제4 자유도(병진)를 제공할 수 있는 제4 조인트(121)를 포함할 수 있다.
도 14는 테이블(101)의 서로 반대편에 있는 측부들 상에 장착된 2개의 조절가능 아암 지지부(105A, 105B)를 갖는 수술 로봇 시스템(140A)의 단부도를 예시한다. 제1 로봇 아암(142A)이 제1 조절가능 아암 지지부(105B)의 바아 또는 레일(107A)에 부착된다. 제1 로봇 아암(142A)은 레일(107A)에 부착되는 기부(144A)를 포함한다. 제1 로봇 아암(142A)의 원위 단부는 하나 이상의 로봇 의료 기구 또는 도구에 부착될 수 있는 기구 구동 메커니즘(146A)을 포함한다. 유사하게, 제2 로봇 아암(142B)은 레일(107B)에 부착되는 기부(144B)를 포함한다. 제2 로봇 아암(142B)의 원위 단부는 기구 구동 메커니즘(146B)을 포함한다. 기구 구동 메커니즘(146B)은 하나 이상의 로봇 의료 기구 또는 도구에 부착되도록 구성될 수 있다.
일부 실시예에서, 로봇 아암들(142A, 142B) 중 하나 이상은 7 이상의 자유도를 갖는 아암을 포함한다. 일부 실시예에서, 로봇 아암들(142A, 142B) 중 하나 이상은, 삽입 축(삽입을 포함하는 1-자유도), 리스트(wrist)(리스트 피치, 요(yaw) 및 롤(roll)을 포함하는 3-자유도), 엘보우(엘보우 피치를 포함하는 1-자유도), 쇼울더(쇼울더 피치 및 요를 포함하는 2-자유도), 및 기부(144A, 144B)(병진을 포함하는 1-자유도)를 포함하는, 8 자유도를 포함할 수 있다. 일부 실시예에서, 삽입 자유도는 로봇 아암(142A, 142B)에 의해 제공될 수 있는 한편, 다른 실시예에서는, 기구 자체가 기구-기반 삽입 아키텍처를 통한 삽입을 제공한다.
C. 기구
드라이버 및 인터페이스.
시스템의 로봇 아암의 엔드 이펙터는 (i) 의료 기구를 작동시키기 위한 전기-기계 수단을 통합하는 기구 드라이버(대안적으로 "기구 구동 메커니즘" 또는 "기구 장치 조작기"로 지칭됨), 및 (ii) 모터와 같은 임의의 전기-기계 구성요소가 없을 수 있는 제거가능 또는 탈착가능 의료 기구를 포함할 수 있다. 이러한 이분법은 의료 절차에 사용되는 의료 기구를 멸균할 필요성, 및 그들의 복잡한 기계 조립체 및 민감한 전자장치로 인해 고가의 자본 장비를 적절하게 멸균할 수 없음에 의해 주도될 수 있다. 따라서, 의료 기구는 의사 또는 의사의 스태프에 의한 개별적인 멸균 또는 폐기를 위해 기구 드라이버(및 그에 따라 시스템)로부터 탈착, 제거, 및 교환되도록 설계될 수 있다. 대조적으로, 기구 드라이버는 변경 또는 멸균될 필요가 없고, 보호를 위해 드레이핑될(draped) 수 있다.
도 15는 예시적인 기구 드라이버를 예시한다. 로봇 아암의 원위 단부에 위치되어, 기구 드라이버(62)는 구동 샤프트(64)를 통해 의료 기구에 제어된 토크를 제공하기 위해 평행 축으로 배열되는 하나 이상의 구동 유닛(63)을 포함한다. 각각의 구동 유닛(63)은 기구와 상호작용하기 위한 개별 구동 샤프트(64), 모터 샤프트 회전을 원하는 토크로 변환시키기 위한 기어 헤드(65), 구동 토크를 생성하기 위한 모터(66), 모터 샤프트의 속도를 측정하고 제어 회로부에 피드백을 제공하기 위한 인코더(encoder)(67), 및 제어 신호를 수신하고 구동 유닛을 작동시키기 위한 제어 회로부(68)를 포함한다. 각각의 구동 유닛(63)은 독립적으로 제어되고 동력화될 수 있고, 기구 드라이버(62)는 의료 기구에 다수의(예컨대, 도 16 및 도 17에 도시된 바와 같이 4개의) 독립적인 구동 출력부(drive output)를 제공할 수 있다. 작동 시에, 제어 회로부(68)는 제어 신호를 수신할 것이고, 모터(66)에 모터 신호를 전송할 것이며, 인코더(67)에 의해 측정된 바와 같은 생성된 모터 속도를 원하는 속도와 비교할 것이고, 모터 신호를 변조하여 원하는 토크를 생성할 것이다.
멸균 환경을 필요로 하는 절차의 경우, 로봇 시스템은 기구 드라이버와 의료 기구 사이에 있는, 멸균 드레이프(sterile drape)에 연결된 멸균 어댑터(sterile adapter)와 같은 구동 인터페이스를 통합할 수 있다. 멸균 어댑터의 주된 목적은 기구 드라이버의 구동 샤프트로부터 기구의 구동 입력부(drive input)로 각도 운동을, 구동 샤프트와 구동 입력부 사이의 물리적 분리, 및 그에 따라 멸균을 유지시키면서, 전달하는 것이다. 따라서, 예시적인 멸균 어댑터는 기구 드라이버의 구동 샤프트 및 기구 상의 구동 입력부와 정합되도록 의도되는 일련의 회전 입력부 및 출력부를 포함할 수 있다. 멸균 어댑터에 연결되어, 투명 또는 반투명 플라스틱과 같은 얇은 가요성 재료로 구성된 멸균 드레이프는 기구 드라이버, 로봇 아암, (카트-기반 시스템 내의) 카트 또는 (테이블-기반 시스템 내의) 테이블과 같은 자본 장비를 덮도록 설계된다. 드레이프의 사용은 자본 장비가 멸균을 필요로 하지 않는 영역(즉, 비-멸균 영역) 내에 여전히 위치되면서 환자에게 근접하게 위치되도록 허용할 것이다. 멸균 드레이프의 다른 하나의 측부 상에서, 의료 기구는 멸균을 필요로 하는 영역(즉, 멸균 영역)에서 환자와 인터페이싱할 수 있다.
D. 의료
기구.
도 16은 페어링된 기구 드라이버를 갖는 예시적인 의료 기구를 예시한다. 로봇 시스템과 함께 사용하도록 설계된 다른 기구와 마찬가지로, 의료 기구(70)는 세장형 샤프트(71)(또는 세장형 본체) 및 기구 기부(instrument base)(72)를 포함한다. 의사에 의한 수동 상호작용을 위한 그의 의도된 설계로 인해 "기구 손잡이"로 또한 지칭되는 기구 기부(72)는 일반적으로, 로봇 아암(76)의 원위 단부에서 기구 드라이버(75) 상의 구동 인터페이스를 통해 연장되는 구동 출력부(74)와 정합되도록 설계되는 회전가능 구동 입력부(73), 예컨대 리셉터클(receptacle), 풀리(pulley), 또는 스풀을 포함할 수 있다. 물리적으로 연결, 래칭(latched), 및/또는 결합될 때, 기구 기부(72)의 정합된 구동 입력부(73)는 기구 드라이버(75) 내의 구동 출력부(74)와 회전 축을 공유하여, 구동 출력부(74)로부터 구동 입력부(73)로의 토크의 전달을 허용할 수 있다. 일부 실시예에서, 구동 출력부(74)는 구동 입력부(73) 상의 리셉터클과 정합하도록 설계되는 스플라인(spline)을 포함할 수 있다.
세장형 샤프트(71)는, 예컨대 내시경술에서와 같이, 해부학적 개구 또는 내강, 또는 예컨대 복강경술에서와 같이, 최소 침습 절개부를 통해 전달되도록 설계된다. 세장형 샤프트(71)는 가요성(예컨대, 내시경과 유사한 특성을 가짐) 또는 강성(예컨대, 복강경과 유사한 특성을 가짐)이거나 가요성 부분 및 강성 부분 둘 모두의 맞춤형 조합을 포함할 수 있다. 복강경술을 위해 설계될 때, 강성의 세장형 샤프트의 원위 단부는, 적어도 1의 자유도를 갖는 클레비스(clevis)로부터 형성되는 조인트식 리스트(jointed wrist)로부터 연장되는 엔드 이펙터, 및 구동 입력부가 기구 드라이버(75)의 구동 출력부(74)로부터 수신된 토크에 응답하여 회전함에 따라 텐돈(tendon)으로부터의 힘에 기초하여 작동될 수 있는, 예를 들어 파지기 또는 가위와 같은 수술 도구 또는 의료 기구에 연결될 수 있다. 내시경술을 위해 설계될 때, 가요성의 세장형 샤프트의 원위 단부는 기구 드라이버(75)의 구동 출력부(74)로부터 수신된 토크에 기초하여 관절운동되고 구부러질 수 있는 조향가능 또는 제어가능 굽힘 섹션을 포함할 수 있다.
기구 드라이버(75)로부터의 토크는 세장형 샤프트(71)를 따른 텐돈을 사용하여 세장형 샤프트(71)를 따라 전달된다. 당김 와이어(pull wire)와 같은 이들 개별 텐돈은 기구 손잡이(72) 내의 개별 구동 입력부(73)에 개별적으로 고정될 수 있다. 손잡이(72)로부터, 텐돈은 세장형 샤프트(71)를 따른 하나 이상의 당김 루멘(pull lumen)을 따라 지향되고, 세장형 샤프트(71)의 원위 부분에, 또는 세장형 샤프트(71)의 원위 부분에 있는 리스트 내에 고정된다. 복강경술, 내시경술 또는 하이브리드 절차와 같은 수술 절차 동안, 이들 텐돈은 리스트, 파지기, 또는 가위와 같은 원위에 장착된 엔드 이펙터에 결합될 수 있다. 그러한 배열 하에서, 구동 입력부(73)에 가해진 토크는 텐돈에 장력을 전달하여, 그에 의해 엔드 이펙터가 일정 방식으로 작동하게 할 것이다. 복강경술에서, 텐돈은 조인트가 축을 중심으로 회전하게 하여, 그에 의해 엔드 이펙터가 하나의 방향 또는 다른 방향으로 이동하게 할 수 있다. 대안적으로, 텐돈은 세장형 샤프트(71)의 원위 단부에서 파지기의 하나 이상의 조오(jaw)에 연결될 수 있으며, 여기에서 텐돈으로부터의 장력은 파지기가 폐쇄되게 한다.
내시경술에서, 텐돈은 접착제, 제어 링, 또는 다른 기계적 고정을 통해 (예컨대, 원위 단부에서) 세장형 샤프트(71)를 따라 위치된 굽힘 또는 관절운동 섹션에 결합될 수 있다. 굽힘 섹션의 원위 단부에 고정식으로 부착될 때, 구동 입력부(73)에 가해진 토크는 텐돈을 따라 전달되어, 더 연질인 굽힘 섹션(때때로 관절운동가능 섹션 또는 영역으로 지칭됨)이 구부러지거나 관절운동하게 할 것이다. 비-굽힘 섹션을 따라, 내시경 샤프트의 벽을 따라(또는 그 내측에서) 개별 텐돈을 지향시키는 개별 당김 루멘을 나선형화 또는 나선화하여, 당김 와이어의 장력으로부터 발생하는 반경방향 힘의 균형을 잡는 것이 유리할 수 있다. 나선(spiraling)의 각도 및/또는 그들 사이의 간격은 특정 목적을 위해 변경 또는 조작될 수 있으며, 여기에서 더 조밀한 나선은 하중 힘 하에서의 더 작은 샤프트 압축을 나타내는 한편, 더 적은 양의 나선은 하중 힘 하에서의 더 큰 샤프트 압축을 가져오지만, 또한 더 제한된 굽힘을 나타낸다. 스펙트럼의 다른 단부 상에서, 당김 루멘은 원하는 굽힘 또는 관절운동가능 섹션에서의 제어된 관절운동을 허용하기 위해 세장형 샤프트(71)의 길이방향 축에 평행하게 지향될 수 있다.
내시경술에서, 세장형 샤프트(71)는 로봇 절차를 보조하기 위한 다수의 구성요소를 수용한다. 샤프트(71)는 샤프트(71)의 원위 단부에서 수술 영역에 수술 도구(또는 의료 기구), 관주, 및/또는 흡인을 전개시키기 위한 작업 채널을 포함할 수 있다. 샤프트(71)는 또한, 광학 카메라를 포함할 수 있는, 원위 팁(distal tip)에 있는 광학 조립체로/그로부터 신호를 전달하기 위한 와이어 및/또는 광섬유를 수용할 수 있다. 샤프트(71)는 또한, 발광 다이오드와 같은 근위에 위치된 광원으로부터 샤프트(71)의 원위 단부로 광을 전달하기 위한 광섬유를 수용할 수 있다.
기구(70)의 원위 단부에서, 원위 팁은 또한, 진단 및/또는 치료, 관주, 및 흡인을 위한 도구를 수술 부위로 전달하기 위한 작업 채널의 개구를 포함할 수 있다. 원위 팁은 또한, 내부 해부학적 공간의 이미지를 캡처하기 위한, 섬유경 또는 디지털 카메라와 같은 카메라를 위한 포트를 포함할 수 있다. 이와 관련하여, 원위 팁은 또한, 카메라를 사용할 때 해부학적 공간을 조명하기 위한 광원을 위한 포트를 포함할 수 있다.
도 16의 예에서, 구동 샤프트 축, 및 그에 따라 구동 입력부 축은 세장형 샤프트(71)의 축에 직교한다. 그러나, 이러한 배열은 세장형 샤프트(71)에 대한 롤 능력을 복잡하게 한다. 구동 입력부(73)를 정적으로 유지시키면서 세장형 샤프트(71)를 그의 축을 따라 롤링시키는 것은 텐돈이 구동 입력부(73)로부터 연장되고 세장형 샤프트(71) 내의 당김 루멘에 들어감에 따라 텐돈의 바람직하지 않은 엉킴을 야기한다. 그러한 텐돈의 결과적인 엉킴은 내시경술 절차 동안 가요성의 세장형 샤프트(71)의 이동을 예측하도록 의도된 임의의 제어 알고리즘을 방해할 수 있다.
도 17은 구동 유닛의 축이 기구의 세장형 샤프트의 축에 평행한 기구 드라이버 및 기구에 대한 대안적인 설계를 예시한다. 도시된 바와 같이, 원형 기구 드라이버(80)는 그들의 구동 출력부(81)가 로봇 아암(82)의 단부에서 평행하게 정렬되는 4개의 구동 유닛을 포함한다. 구동 유닛, 및 그들 각각의 구동 출력부(81)는 기구 드라이버(80)의 회전 조립체(83) 내에 수용되며, 이는 조립체(83) 내의 구동 유닛들 중 하나에 의해 구동된다. 회전 구동 유닛에 의해 제공되는 토크에 응답하여, 회전 조립체(83)는 회전 조립체(83)를 기구 드라이버(80)의 비-회전 부분(84)에 연결하는 원형 베어링을 따라 회전한다. 전력 및 제어 신호가 기구 드라이버(80)의 비-회전 부분(84)으로부터, 브러시형 슬립 링 연결부(brushed slip ring connection)(도시되지 않음)에 의해 회전을 통해 유지될 수 있는 전기 접촉부를 통해 회전 조립체(83)로 전달될 수 있다. 다른 실시예에서, 회전 조립체(83)는, 비-회전가능 부분(84) 내에 통합되어, 그에 따라 다른 구동 유닛에 평행하지 않은 별개의 구동 유닛에 응답할 수 있다. 회전 메커니즘(83)은 기구 드라이버(80)가 구동 유닛, 및 그들 각각의 구동 출력부(81)를 단일 유닛으로서 기구 드라이버 축(85)을 중심으로 회전시키도록 허용한다.
이전에 개시된 실시예와 마찬가지로, 기구(86)는 세장형 샤프트 부분(88), 및 기구 드라이버(80) 내의 구동 출력부(81)를 수용하도록 구성되는 (리셉터클, 풀리, 및 스풀과 같은) 복수의 구동 입력부(89)를 포함하는 기구 기부(87)(논의 목적을 위해 투명 외부 스킨으로 도시됨)를 포함할 수 있다. 이전에 개시된 실시예와 달리, 기구 샤프트(88)는 축이 도 16의 설계에서와 같이 직교하기보다는 구동 입력부(89)의 축에 실질적으로 평행한 상태로 기구 기부(87)의 중심으로부터 연장된다.
기구 드라이버(80)의 회전 조립체(83)에 결합될 때, 기구 기부(87) 및 기구 샤프트(88)를 포함하는 의료 기구(86)는 회전 조립체(83)와 조합하여 기구 드라이버 축(85)을 중심으로 회전한다. 기구 샤프트(88)가 기구 기부(87)의 중심에 위치되기 때문에, 기구 샤프트(88)는 부착될 때 기구 드라이버 축(85)과 동축이다. 따라서, 회전 조립체(83)의 회전은 기구 샤프트(88)가 그 자체의 길이방향 축을 중심으로 회전하게 한다. 더욱이, 기구 기부(87)가 기구 샤프트(88)와 함께 회전함에 따라, 기구 기부(87) 내의 구동 입력부(89)에 연결된 임의의 텐돈은 회전 동안 엉키지 않는다. 따라서, 구동 출력부(81), 구동 입력부(89), 및 기구 샤프트(88)의 축의 평행성은 임의의 제어 텐돈을 엉키게 하지 않고서 샤프트 회전을 허용한다.
도 18은 일부 실시예에 따른, 기구 기반 삽입 아키텍처를 갖는 기구를 예시한다. 기구(150)는 위에서 논의된 기구 드라이버들 중 임의의 것에 결합될 수 있다. 기구(150)는 세장형 샤프트(152), 샤프트(152)에 연결되는 엔드 이펙터(162), 및 샤프트(152)에 결합되는 손잡이(170)를 포함한다. 세장형 샤프트(152)는 근위 부분(154) 및 원위 부분(156)을 갖는 튜브형 부재를 포함한다. 세장형 샤프트(152)는 그의 외부 표면을 따라 하나 이상의 채널 또는 홈(158)을 포함한다. 홈(158)은 그를 통해 하나 이상의 와이어 또는 케이블(180)을 수용하도록 구성된다. 따라서, 하나 이상의 케이블(180)이 세장형 샤프트(152)의 외부 표면을 따라 이어진다. 다른 실시예에서, 케이블(180)은 또한 세장형 샤프트(152)를 통해 이어질 수 있다. (예컨대, 기구 드라이버를 통한) 하나 이상의 케이블(180)의 조작이 엔드 이펙터(162)의 작동을 유발한다.
기구 기부로 또한 지칭될 수 있는 기구 손잡이(170)는 일반적으로, 기구 드라이버의 부착 표면 상의 하나 이상의 토크 커플러(torque coupler)와 상호 정합되도록 설계되는 하나 이상의 기계적 입력부(174), 예컨대 리셉터클, 풀리 또는 스풀을 갖는 부착 인터페이스(172)를 포함할 수 있다.
일부 실시예에서, 기구(150)는 세장형 샤프트(152)가 손잡이(170)에 대해 병진하는 것을 가능하게 하는 일련의 풀리 또는 케이블을 포함한다. 다시 말하면, 기구(150) 자체가 기구의 삽입을 수용하는 기구-기반 삽입 아키텍처를 포함하여, 그에 의해 기구(150)의 삽입을 제공하기 위한 로봇 아암에 대한 의존성을 최소화한다. 다른 실시예에서, 로봇 아암이 기구 삽입을 주로 담당할 수 있다.
E. 제어기
.
본 명세서에 기술된 로봇 시스템들 중 임의의 것은 로봇 아암에 부착된 기구를 조작하기 위한 입력 장치 또는 제어기를 포함할 수 있다. 일부 실시예에서, 제어기는 제어기의 조작이 예컨대 마스터 슬레이브 제어(master slave control)를 통해 기구의 대응하는 조작을 유발하도록 기구와 (예컨대, 통신가능하게, 전자적으로, 전기적으로, 무선으로, 그리고/또는 기계적으로) 결합될 수 있다.
도 19는 제어기(182)의 일 실시예의 사시도이다. 본 실시예에서, 제어기(182)는 임피던스 및 어드미턴스 제어(impedance and admittance control) 둘 모두를 가질 수 있는 하이브리드 제어기를 포함한다. 다른 실시예에서, 제어기(182)는 단지 임피던스 또는 수동 제어(passive control)를 이용할 수 있다. 다른 실시예에서, 제어기(182)는 단지 어드미턴스 제어를 이용할 수 있다. 하이브리드 제어기임으로 인해, 제어기(182)는 유리하게는 사용 중인 동안 더 낮은 인지 관성(perceived inertia)을 가질 수 있다.
예시된 실시예에서, 제어기(182)는 2개의 의료 기구의 조작을 허용하도록 구성되고, 2개의 손잡이(184)를 포함한다. 손잡이들(184) 각각은 짐벌(gimbal)(186)에 연결된다. 각각의 짐벌(186)은 위치설정 플랫폼(188)에 연결된다.
도 19에 도시된 바와 같이, 각각의 위치설정 플랫폼(188)은 직선형 조인트(prismatic joint)(196)에 의해 칼럼(194)에 결합되는 SCARA 아암(선택적 순응형 조립 로봇 아암(selective compliance assembly robot arm))(198)을 포함한다. 직선형 조인트(196)는 손잡이들(184) 각각이 z-방향으로 병진되는 것을 허용하여 제1 자유도를 제공하기 위해 칼럼(194)을 따라(예컨대, 레일(197)을 따라) 병진하도록 구성된다. SCARA 아암(198)은 x-y 평면 내에서의 손잡이(184)의 운동을 허용하여, 2의 추가 자유도를 제공하도록 구성된다.
일부 실시예에서, 하나 이상의 로드 셀(load cell)이 제어기 내에 위치된다. 예를 들어, 일부 실시예에서, 로드 셀(도시되지 않음)이 짐벌들(186) 각각의 본체에 위치된다. 로드 셀을 제공함으로써, 제어기(182)의 부분들은 어드미턴스 제어 하에서 작동할 수 있어서, 그에 의해 유리하게는 사용 중인 동안 제어기의 인지 관성을 감소시킨다. 일부 실시예에서, 위치설정 플랫폼(188)은 어드미턴스 제어를 위해 구성되는 한편, 짐벌(186)은 임피던스 제어를 위해 구성된다. 다른 실시예에서, 짐벌(186)은 어드미턴스 제어를 위해 구성되는 한편, 위치설정 플랫폼(188)은 임피던스 제어를 위해 구성된다. 따라서, 일부 실시예의 경우, 위치설정 플랫폼(188)의 병진 또는 위치 자유도는 어드미턴스 제어에 의존할 수 있는 한편, 짐벌(186)의 회전 자유도는 임피던스 제어에 의존할 수 있다.
F. 내비게이션
및 제어.
전통적인 내시경술은 (예컨대, C-아암을 통해 전달될 수 있는 바와 같은) 형광투시법 및 다른 형태의 방사선-기반 이미징 모달리티(imaging modality)의 사용을 수반하여, 조작자 의사에게 관내 안내를 제공할 수 있다. 대조적으로, 본 개시에 의해 고려되는 로봇 시스템은 비-방사선-기반 내비게이션 및 위치결정 수단을 제공하여, 방사선에 대한 의사의 노출을 감소시키고 수술실 내의 장비의 양을 감소시킬 수 있다. 본 명세서에 사용되는 바와 같이, 용어 "위치결정"은 기준 좌표계에서 물체의 위치를 결정 및/또는 모니터링하는 것을 지칭할 수 있다. 수술전 매핑, 컴퓨터 비전(computer vision), 실시간 EM 추적, 및 로봇 명령 데이터와 같은 기법은 방사선이 없는 수술 환경을 달성하기 위해 개별적으로 또는 조합으로 사용될 수 있다. 방사선-기반 이미징 모달리티가 여전히 사용되는 다른 경우에, 수술전 매핑, 컴퓨터 비전, 실시간 EM 추적, 및 로봇 명령 데이터는 방사선-기반 이미징 모달리티만을 통해 획득된 정보를 개선하기 위해 개별적으로 또는 조합으로 사용될 수 있다.
도 20은 예시적인 실시예에 따른, 기구의 위치와 같은, 로봇 시스템의 하나 이상의 요소의 위치를 추정하는 위치결정 시스템(90)을 예시한 블록도이다. 위치결정 시스템(90)은 하나 이상의 명령어를 실행하도록 구성되는 하나 이상의 컴퓨터 장치들의 세트일 수 있다. 컴퓨터 장치는 위에서 논의된 하나 이상의 구성요소 내의 프로세서(또는 프로세서들) 및 컴퓨터-판독가능 메모리에 의해 구현될 수 있다. 제한이 아닌 예로서, 컴퓨터 장치는 도 1에 도시된 타워(30), 도 1 내지 도 4에 도시된 카트(11), 도 5 내지 도 14에 도시된 베드 등 내에 있을 수 있다.
도 20에 도시된 바와 같이, 위치결정 시스템(90)은 의료 기구의 원위 팁에 대한 위치 데이터(96)를 생성하도록 입력 데이터(91 내지 94)를 처리하는 위치결정 모듈(95)을 포함할 수 있다. 위치 데이터(96)는 기준 프레임(frame of reference)에 대한 기구의 원위 단부의 위치 및/또는 배향을 나타내는 데이터 또는 논리일 수 있다. 기준 프레임은 환자의 해부학적 구조 또는 알려진 물체, 예컨대 EM 필드 발생기(EM 필드 발생기에 대해서는 아래의 논의 참조)에 대한 기준 프레임일 수 있다.
이제, 다양한 입력 데이터(91 내지 94)가 더 상세히 기술된다. 수술전 매핑은 저 선량 CT 스캔의 집합의 사용을 통해 달성될 수 있다. 수술전 CT 스캔은 3차원 이미지로 재구성되며, 이는, 예컨대 환자의 내부 해부학적 구조의 절결도의 "슬라이스(slice)"로서 시각화된다. 전체적으로 분석될 때, 환자 폐 네트워크와 같은 환자의 해부학적 구조의 해부학적 공동, 공간, 및 구조에 대한 이미지-기반 모델이 생성될 수 있다. 중심선 기하학(center-line geometry)과 같은 기법이 CT 이미지로부터 결정되고 근사화되어, 모델 데이터(91)로 지칭되는(수술전 CT 스캔만을 사용하여 생성될 때 "수술전 모델 데이터"로 또한 지칭됨), 환자의 해부학적 구조의 3차원 볼륨(three-dimensional volume)을 개발할 수 있다. 일부 실시예에서, 수술전 모델 데이터(91)는 예컨대 형광투시법, 자기 공명 영상(magnetic resonance imaging, MRI), 초음파 영상, 및/또는 x-선으로부터의 데이터를 포함할 수 있다. 중심선 기하학의 사용은 그 내용이 전체적으로 본 명세서에 포함되는 미국 특허 출원 제14/523,760호에서 논의된다. 네트워크 위상 모델(network topological model)이 또한 CT 이미지로부터 도출될 수 있으며, 기관지경술에 특히 적절하다.
일부 실시예에서, 기구는 비전 데이터(또는 이미지 데이터)(92)를 제공하기 위한 카메라를 구비할 수 있다. 위치결정 모듈(95)은 하나 이상의 비전-기반(또는 이미지-기반) 위치 추적 모듈 또는 특징부를 가능하게 하도록 비전 데이터(92)를 처리할 수 있다. 예를 들어, 수술전 모델 데이터(91)는 비전 데이터(92)와 함께 사용되어 의료 기구의 컴퓨터 비전-기반 추적을 가능하게 할 수 있다(예컨대, 내시경 전진 또는 내시경의 작업 채널을 통한 기구 전진). 예를 들어, 수술전 모델 데이터(91)를 사용하여, 로봇 시스템은 내시경의 예상 이동 경로에 기초하여 모델로부터 예상 내시경 이미지의 라이브러리(library)를 생성할 수 있으며, 각각의 이미지는 모델 내의 일정 위치에 링크된다. 수술중에, 이러한 라이브러리는, 카메라(예컨대, 내시경의 원위 단부에 있는 카메라)에서 캡처된 실시간 이미지를 이미지 라이브러리 내의 이미지와 비교하여 위치결정을 보조하기 위해 로봇 시스템에 의해 참조될 수 있다.
다른 컴퓨터 비전-기반 추적 기법은 특징부 추적을 사용하여 카메라, 및 그에 따라 내시경의 운동을 결정한다. 위치결정 모듈(95)의 일부 특징부는 해부학적 내강에 대응하는 수술전 모델 데이터(91) 내의 원형 기하학적 구조를 식별하고 그들 기하학적 구조의 변화를 추적하여, 어느 해부학적 내강이 선택되었는지뿐만 아니라 카메라의 상대 회전 및/또는 병진 운동을 결정할 수 있다. 위상 맵(topological map)의 사용은 비전-기반 알고리즘 또는 기법을 추가로 향상시킬 수 있다.
다른 컴퓨터 비전-기반 기법인 광학 흐름(optical flow)은 비전 데이터(92) 내의 비디오 시퀀스(video sequence)에서 이미지 픽셀의 변위 및 병진을 분석하여 카메라 이동을 추론할 수 있다. 광학 흐름 기법의 예는 모션 검출(motion detection), 객체 분할 계산(object segmentation calculation), 휘도(luminance), 모션 보상 인코딩(motion compensated encoding), 스테레오 디스패리티 측정(stereo disparity measurement) 등을 포함할 수 있다. 다수의 반복에 걸친 다수의 프레임의 비교를 통해, 카메라(및 그에 따라 내시경)의 이동 및 위치가 결정될 수 있다.
위치결정 모듈(95)은 수술전 모델에 의해 표현되는 환자의 해부학적 구조에 정합될 수 있는 전역 좌표계에서 내시경의 실시간 위치를 생성하기 위해 실시간 EM 추적을 사용할 수 있다. EM 추적에서, 의료 기구(예컨대, 내시경 도구) 내에 하나 이상의 위치 및 배향으로 내장된 하나 이상의 센서 코일을 포함하는 EM 센서(또는 추적기)가 알려진 위치에 위치된 하나 이상의 정적 EM 필드 발생기에 의해 생성되는 EM 필드의 변화를 측정한다. EM 센서에 의해 검출된 위치 정보는 EM 데이터(93)로서 저장된다. EM 필드 발생기(또는 전송기)는 내장된 센서가 검출할 수 있는 저 강도 자기장을 생성하기 위해 환자 가까이에 배치될 수 있다. 자기장은 EM 센서의 센서 코일에 소전류(small current)를 유도하며, 이는 EM 센서와 EM 필드 발생기 사이의 거리 및 각도를 결정하기 위해 분석될 수 있다. 이들 거리 및 배향은 좌표계 내의 단일 위치를 환자의 해부학적 구조의 수술전 모델 내의 위치와 정렬시키는 기하학적 변환을 결정하기 위해 수술중에 환자 해부학적 구조(예컨대, 수술전 모델)에 "정합될" 수 있다. 일단 정합되면, 의료 기구의 하나 이상의 위치(예컨대, 내시경의 원위 팁)에 있는 내장된 EM 추적기는 환자의 해부학적 구조를 통한 의료 기구의 진행의 실시간 표시(real-time indication)를 제공할 수 있다.
로봇 명령 및 운동학(kinematics) 데이터(94)가 또한 위치결정 모듈(95)에 의해 사용되어, 로봇 시스템에 대한 위치결정 데이터(96)를 제공할 수 있다. 관절운동 명령으로부터 발생하는 장치 피치 및 요는 수술전 보정 동안 결정될 수 있다. 수술중에, 이들 보정 측정치는 알려진 삽입 깊이 정보와 조합하여 사용되어 기구의 위치를 추정할 수 있다. 대안적으로, 이들 계산치는 EM, 비전, 및/또는 위상 모델링과 조합하여 분석되어 네트워크 내의 의료 기구의 위치를 추정할 수 있다.
도 20이 도시하는 바와 같이, 다수의 다른 입력 데이터가 위치결정 모듈(95)에 의해 사용될 수 있다. 예를 들어, 도 20에 도시되어 있지 않지만, 형상-감지 섬유를 이용하는 기구가, 위치결정 모듈(95)이 기구의 위치 및 형상을 결정하는 데 사용할 수 있는 형상 데이터를 제공할 수 있다.
위치결정 모듈(95)은 입력 데이터(91 내지 94)를 조합(들)으로 사용할 수 있다. 일부 경우에, 그러한 조합은 위치결정 모듈(95)이 입력 데이터(91 내지 94) 각각으로부터 결정된 위치에 신뢰 가중치(confidence weight)를 할당하는 확률적 접근법(probabilistic approach)을 사용할 수 있다. 따라서, (EM 간섭이 있는 경우 그러할 수 있는 바와 같이) EM 데이터가 신뢰할 수 없을 수 있는 경우, EM 데이터(93)에 의해 결정된 위치의 신뢰도가 감소될 수 있고, 위치결정 모듈(95)은 비전 데이터(92) 및/또는 로봇 명령 및 운동학 데이터(94)에 더 많이 의존할 수 있다.
위에서 논의된 바와 같이, 본 명세서에서 논의되는 로봇 시스템은 위의 기법들 중 하나 이상의 조합을 통합하도록 설계될 수 있다. 타워, 베드 및/또는 카트에 기반한 로봇 시스템의 컴퓨터-기반 제어 시스템은 예를 들어 영구 자기 저장 드라이브, 솔리드 스테이트 드라이브 등과 같은 비-일시적 컴퓨터-판독가능 저장 매체 내에 컴퓨터 프로그램 명령어를 저장할 수 있으며, 이는, 실행 시에, 시스템으로 하여금 센서 데이터 및 사용자 명령을 수신 및 분석하고, 시스템 전체에 걸쳐 제어 신호를 생성하고, 전역 좌표계, 해부학적 맵 등 내에서의 기구의 위치와 같은 내비게이션 및 위치결정 데이터를 디스플레이하게 한다.
II. 내강 네트워크의 내비게이션.
위에서 논의된 다양한 로봇 시스템은 내시경술 및 복강경술 절차와 같은 다양한 의료 절차를 수행하기 위해 채용될 수 있다. 소정 절차 동안, 로봇-제어식 의료 기구와 같은 의료 기구가 환자의 신체 내로 삽입된다. 환자의 신체 내에서, 기구는 환자의 내강 네트워크 내에 위치될 수 있다. 본 명세서에 사용되는 바와 같이, 용어 "내강 네트워크"는, 복수의 내강 또는 분지부(예컨대, 폐 또는 혈관에서와 같은, 복수의 분지 내강) 또는 단일 내강 또는 분지부(예컨대, 위장관 내의)를 포함하든지 간에, 신체 내의 임의의 공동 구조를 지칭한다. 절차 동안, 기구는 내강 네트워크를 통해 하나 이상의 관심 대상의 영역으로 이동(예컨대, 내비게이팅, 안내, 구동 등)될 수 있다. 시스템을 통한 기구의 이동은 위에서 논의된 내비게이션 또는 위치결정 시스템(90)에 의해 도움을 받을 수 있으며, 이는 기구에 관한 위치 정보를 로봇 시스템을 제어하는 의사에게 제공할 수 있다.
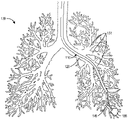
도 21은 환자의 예시적인 내강 네트워크(130)를 예시한다. 예시된 실시예에서, 내강 네트워크(130)는 환자의 폐의 경로(151)의 기관지 네트워크(즉, 내강, 분지부)이다. 예시된 내강 네트워크(130)가 환자의 폐 내의 기도의 기관지 네트워크이지만, 본 개시는 예시된 예로만 제한되지 않는다. 본 명세서에 기술된 로봇 시스템 및 방법은 기관지 네트워크, 신장 네트워크, 심혈관 네트워크(예컨대, 동맥 및 정맥), 위장관, 요로 등과 같은 임의의 유형의 내강 네트워크를 내비게이팅하기 위해 사용될 수 있다.
예시된 바와 같이, 내강 네트워크(130)는 분지 구조로 배열된 복수의 경로(151)를 포함한다. 일반적으로, 내강 네트워크(130)는 3차원 구조를 포함한다. 예시의 용이함을 위해, 도 21은 2차원 구조로서 내강 네트워크(130)를 표현한다. 이는 본 개시를 임의의 방식으로 2차원 내강 네트워크로 제한하는 것으로 해석되어서는 안 된다.
도 21은 또한 내강 네트워크(130) 내에 위치된 의료 기구의 예를 예시한다. 의료 기구는 진단 및/또는 처치를 위한 관심 대상의 영역(예컨대, 결절(155))을 향해 내강 네트워크(130)를 통해 내비게이팅된다. 예시된 예에서, 결절(155)은 경로(151)의 말초 부위(periphery)에 위치되지만, 관심 대상의 영역(들)은 환자 및 절차에 따라 내강 네트워크(130) 내에 어디든 위치될 수 있다.
예시된 예에서, 의료 기구는 내시경(116)을 포함한다. 내시경(116)은 시스(120) 및 리더(145)를 포함할 수 있다. 일부 실시예에서, 시스(120) 및 리더(145)는 삽통식 방식으로 배열될 수 있다. 예를 들어, 리더(145)는 시스(120)의 작업 채널 내측에 활주가능하게 위치될 수 있다. 시스(120)는 제1 직경을 가질 수 있고, 그의 원위 단부는 결절(155) 주위에서 소-직경 경로(151)를 통해 위치되는 것이 가능하지 않을 수 있다. 따라서, 리더(145)는 결절(155)까지의 나머지 거리만큼 시스(120)의 작업 채널로부터 연장되도록 구성될 수 있다. 리더(145)는 기구, 예를 들어 생검 바늘, 세포채취용 브러시(cytology brush), 및/또는 조직 샘플링 겸자가 그것을 통해 결절(155)의 표적 조직 부위로 통과될 수 있는 루멘을 가질 수 있다. 그러한 구현예에서, 시스(120)의 원위 단부 및 리더(145)의 원위 단부 둘 모두에는 경로(151) 내에서의 그들의 위치를 추적하기 위한 EM 기구 센서(예컨대, 도 23의 EM 기구 센서(305))가 제공될 수 있다. 시스(120) 및 리더(145)의 이러한 삽통식 배열은 내시경(116)의 더 얇은 설계를 허용할 수 있고, 시스(120)를 통한 구조적 지지를 제공하면서 내시경(116)의 굽힘 반경을 개선할 수 있다.
다른 실시예에서, 내시경(116)의 전체 직경은 삽통식 배열 없이 말초 부위에 도달하기에 충분히 작을 수 있거나, 비-조향가능 카테터를 통해 의료 기구를 전개시키도록 말초 부위에 접근하기에 충분히 작을 수 있다(예컨대, 약 2.5 내지 3 cm 이내). 내시경(116)을 통해 전개되는 의료 기구는 EM 기구 센서(예컨대, 도 23의 EM 기구 센서(305))를 구비할 수 있고, 후술되는 이미지-기반 경로 분석 및 매핑 기법이 그러한 의료 기구에 적용될 수 있다.
도시된 바와 같이, 결절(155)에 도달하기 위해, 기구(예컨대, 내시경(116))는 내강 네트워크의 경로(151)를 통해 내비게이팅되거나 안내되어야 한다. 조작자(예컨대, 의사)가 로봇 시스템을 제어하여 기구를 결절(155)로 내비게이팅할 수 있다. 조작자는 로봇 시스템을 제어하기 위한 입력을 제공할 수 있다.
도 22는 본 명세서에 기술된 로봇 시스템의 일부 구현예와 함께 사용될 수 있는 예시적인 명령 콘솔(200)을 예시한다. 조작자는 명령 콘솔(200)을 통해, 예를 들어 기구를 결절(155)과 같은 관심 대상의 영역으로 내비게이팅하거나 안내하기 위해, 로봇 시스템을 제어하기 위한 입력을 제공할 수 있다. 명령 콘솔(200)은 매우 다양한 배열 또는 구성으로 구현될 수 있다. 예시된 예에서, 명령 콘솔(200)은 콘솔 기부(201), 디스플레이(202)(예컨대, 모니터), 및 하나 이상의 제어 모듈(예컨대, 키보드(203) 및 조이스틱(204))을 포함한다. 사용자(205)(예컨대, 의사 또는 다른 조작자)가 명령 콘솔(200)을 사용하여 인체공학적 위치로부터 의료 로봇 시스템(예컨대, 도 1 내지 도 20을 참조하여 기술된 시스템)을 원격으로 제어할 수 있다.
디스플레이(202)는 전자 모니터(예컨대, LCD 디스플레이, LED 디스플레이, 터치-감응형 디스플레이), 가상 현실 관찰 장치(예컨대, 고글 또는 안경), 및/또는 다른 디스플레이 장치를 포함할 수 있다. 일부 실시예에서, 디스플레이들(202) 중 하나 이상이, 예를 들어 위치결정 시스템(90)(도 20)에 의해 결정되는 바와 같은, 기구에 관한 위치 정보를 디스플레이한다. 일부 실시예에서, 디스플레이들(202) 중 하나 이상이 환자의 내강 네트워크(130)의 수술전 모델을 디스플레이한다. 위치 정보는 수술전 모델 상에 오버레이될(overlaid) 수 있다. 디스플레이(202)는 또한 내강 네트워크(130) 내에서 기구 상에 위치된 카메라 또는 다른 감지 장치로부터 수신된 이미지 정보를 디스플레이할 수 있다. 일부 실시예에서, 기구의 모델 또는 표현이 수술 또는 의료 절차의 상태를 나타내는 데 도움을 주기 위해 수술전 모델과 함께 디스플레이된다.
일부 실시예에서, 콘솔 기부(201)는 카메라 이미지와 같은 신호의 해석과 처리 및 예컨대 환자의 내강 네트워크 내에 위치된 의료 기구로부터의 센서 데이터의 추적을 담당하는 중앙 처리 유닛(예컨대, CPU 또는 프로세서), 메모리 유닛(예컨대, 컴퓨터-판독가능 메모리), 데이터 버스, 및 연관 데이터 통신 포트를 포함한다.
콘솔 기부(201)는 또한 제어 모듈(203, 204)을 통해 사용자(205)에 의해 제공되는 명령 및 명령어를 처리할 수 있다. 도 22에 도시된 키보드(203) 및 조이스틱(204)에 더하여, 제어 모듈은 다른 장치, 예컨대 컴퓨터 마우스, 트랙패드, 트랙볼, 제어 패드, 제어기, 예컨대 핸드헬드 원격 제어기, 및 손 제스처와 손가락 제스처를 캡처하는 센서(예컨대, 모션 센서 또는 카메라)를 포함할 수 있다. 제어기는 기구의 작동(예컨대, 관절운동, 구동, 물 관주 등)에 매핑되는 사용자 입력부들(예컨대, 버튼, 조이스틱, 지향성 패드 등)의 세트를 포함할 수 있다. 명령 콘솔(200)의 제어 모듈(203, 204)을 사용하여, 사용자(205)는 내강 네트워크(130)를 통해 기구를 내비게이팅할 수 있다.
도 23은 예시적인 의료 기구(300)의 원위 단부의 상세도를 예시한다. 의료 기구(300)는 도 21의 내시경(116) 또는 리더(145)를 나타낼 수 있다. 의료 기구(300)는 본 개시 전반에 걸쳐 기술된 임의의 의료 기구, 예컨대 도 1의 내시경(13), 도 3의 요관경(32), 도 9의 복강경(59) 등을 나타낼 수 있다. 도 23에서, 기구(300)의 원위 단부는, EM 기구 센서를 형성하는 이미징 장치(315), 조명원(310), 및 EM 센서 코일(305)의 단부를 포함한다. 원위 단부는, 생검 바늘, 세포채취용 브러시, 겸자 등과 같은 수술 기구가 그것을 통해 기구 샤프트를 따라 삽입되어 기구 팁 부근의 영역에 대한 접근을 허용할 수 있는 기구(300)의 작업 채널(320)로의 개구를 추가로 포함한다.
기구(300)의 원위 단부 상에 위치된 EM 코일(305)은 기구(300)의 원위 단부의 위치 및 배향을, 그것이 내강 네트워크 내에 위치된 상태에서 검출하도록 EM 추적 시스템과 함께 사용될 수 있다. 일부 실시예에서, 코일(305)은 상이한 축을 따라 EM 필드에 대한 감도를 제공하도록 경사져, 개시된 내비게이션 시스템에 최대 6 자유도(DoF): 3 위치 DoF 및 3 각도 DoF를 측정하는 능력을 제공할 수 있다. 다른 실시예에서, 단일 코일(305)만이, 그의 축이 기구 샤프트를 따라 배향된 상태로, 원위 단부 상에 또는 그 내에 배치될 수 있다. 그러한 시스템의 회전 대칭성으로 인해, 그것은 그의 축을 중심으로 하는 롤에 민감하지 않을 수 있고, 따라서 그러한 구현예에서 5 자유도만이 검출될 수 있다. 대안적으로 또는 추가적으로, 다른 유형의 위치 센서가 채용될 수 있다.
조명원(310)은 해부학적 공간의 일부분을 조명하기 위한 광을 제공한다. 조명원(310)은 각각 선택된 파장 또는 파장 범위에서 광을 방출하도록 구성되는 하나 이상의 발광 장치일 수 있다. 파장은 임의의 적합한 파장, 예를 들어, 몇 가지 예를 들면 가시 스펙트럼 광, 적외선 광, x-선(예컨대, 형광투시법을 위함)일 수 있다. 일부 실시예에서, 조명원(310)은 기구(300)의 원위 단부에 위치된 발광 다이오드(LED)를 포함할 수 있다. 일부 실시예에서, 조명원(310)은 원격 광원, 예를 들어 x-선 발생기로부터 원위 단부를 통해 광을 전송하도록 내시경의 길이를 통해 연장되는 하나 이상의 광섬유 섬유를 포함할 수 있다. 원위 단부가 다수의 조명원(310)을 포함하는 경우, 이들은 각각 서로 동일한 또는 상이한 파장의 광을 방출하도록 구성될 수 있다.
이미징 장치(315)는 수신된 광을 나타내는 에너지를 전기 신호로 변환하도록 구성되는 임의의 감광 기판(photosensitive substrate) 또는 구조물, 예를 들어 전하-결합 소자(charge-coupled device, CCD) 또는 상보형 금속-산화물 반도체(complementary metal-oxide semiconductor, CMOS) 이미지 센서를 포함할 수 있다. 이미징 장치(315)의 일부 예는 이미지를 나타내는 광을 내시경의 원위 단부(300)로부터 내시경의 근위 단부 부근의 접안렌즈(eyepiece) 및/또는 이미지 센서로 전송하도록 구성되는 하나 이상의 광섬유, 예를 들어 광섬유 번들을 포함할 수 있다. 이미징 장치(315)는 추가적으로 다양한 광학 설계에서 필요로 하는 바와 같은 하나 이상의 렌즈 및/또는 파장 통과 또는 차단 필터를 포함할 수 있다. 조명원(310)으로부터 방출된 광은 이미징 장치(315)가 환자의 내강 네트워크의 내부의 이미지를 캡처하도록 허용한다. 이들 이미지는 이어서 개별 프레임 또는 일련의 연속적인 프레임(예컨대, 비디오)으로서 명령 콘솔(200)과 같은 컴퓨터 시스템으로 전송될 수 있다. 위에서 언급된 바와 같이 그리고 더 상세히 후술될 바와 같이, 이미징 장치(315)에 의해 캡처된 이미지(예컨대, 도 20의 비전 데이터(92))는 내강 네트워크 내의 기구의 위치(예컨대, 기구(300)의 원위 팁의 위치)를 결정하거나 추정하기 위해 내비게이션 또는 위치결정 시스템(95)에 의해 이용될 수 있다.
III. 이미지
관리.
본 개시의 실시예는 경로(예컨대, 기도) 분석 및/또는 매핑 동안 획득된 이미지의 관리를 위한 시스템 및 기법에 관한 것이다. 이미지 관리는 본 명세서에 기술된 바와 같이 내시경으로부터 획득된 이미지를 식별, 분석, 필터링, 이용, 및/또는 수정하는 것을 지칭할 수 있다. 예를 들어, 이미지 관리 시스템이 내강 네트워크 내의 기구 상에 위치된 이미징 장치를 사용하여 내강 네트워크의 내부의 이미지를 캡처할 수 있고, 이미지 관리 시스템은 이미지에서 보여지는 하나 이상의 기도를 식별하기 위해 이미지를 분석할 수 있다. 이미지 관리 시스템은 이미지의 관리를 지원하기 위해 수술전 모델 데이터(예컨대, 기계 학습 알고리즘(machine learning algorithm)으로부터의 훈련된 모델)를 사용할 수 있다. 예를 들어, 이미지 관리 시스템은, 충분히 신뢰할 수 있고, 명확하고/하거나, 달리 양질인 이미지에 대응하는 주어진 내강 네트워크의 이미지를 식별하도록 구성될 수 있다. 소정 구현예에서, 이들 시스템 및 기법은 (예컨대, 도 20을 참조하여 전술된 바와 같은) 다양한 다른 내비게이션 및 위치결정 모달리티와 함께 사용될 수 있다.
A. 이미지
분석.
의료 절차 동안, 이미지는 의료 기구(예컨대, 내시경)의 이미징 장치로부터 디스플레이 및/또는 메모리 장치로 전달될 수 있다. 내시경 이미지 장치는 내비게이션 동안 임상의에게 직접 비전 인지(direct vision perception)를 제공한다. 추가적으로 또는 대안적으로, 이미지는 (예컨대, 위치결정 모듈(95)을 사용하여) 내강 네트워크 내의 의료 장치의 위치를 결정하도록 알고리즘을 처리함으로써 분석될 수 있다. 그러나, 내시경술 동안 캡처된 이미지, 특히 비정보성(uninformative)인 그러한 이미지는 해석하기 어려울 수 있다. 내시경술에서, 비정보성 이미지는 예를 들어 빠른 카메라 모션에 기인할 수 있는 높은 정도의 유체 아티팩트(fluid artifact), 스페큘러 반사(specular reflection), 및/또는 블러니스(blurness)(또는 블러리니스(blurriness))를 나타내는 이미지를 포함할 수 있다. 이러한 비정보성 이미지를 자동으로 식별하기 위한 컴퓨터화된 알고리즘이 임상의에게 유익할 것이다. 예를 들어, 그러한 이미지는 폐기되고/되거나 비정보성인, 신뢰할 수 없는, 그리고/또는 저품질인 것으로 라벨링될 수 있다. 임상의는 또한 본 명세서에 기술된 후속 이미지 처리 알고리즘으로부터 이득을 얻을 수 있다. 이미지 관리 시스템은 유리하게는 사용자(예컨대, 의사, 의료 전문가 등)가 이미징 장치로부터 획득될 수 있는 도움이 되지 않는 이미지를 회피할 수 있게 한다. 추가적으로 또는 대안적으로, 시스템은 컴퓨터화된 알고리즘이 내강 네트워크 내의 의료 기구의 위치를 더 잘 결정하게 할 수 있다.
내강 네트워크 내측에서 내비게이팅하는 능력은 본 명세서에 기술된 로봇-제어식 수술 시스템의 특징일 수 있고, 위치결정을 수반할 수 있다. 본 명세서에 사용되는 바와 같이, 위치결정은 내강 네트워크 내의 기구의 위치를 찾아내거나 결정하는 것을 지칭할 수 있다. 결정된 위치는 기구를 내강 네트워크 내의 하나 이상의 특정 관심 대상의 영역으로 안내하는 데 도움을 주기 위해 사용될 수 있다. 일부 실시예에서, 로봇-제어식 수술 시스템은 기구에 대한 수술중 내비게이션을 제공하기 위해 하나 이상의 독립적인 감지 모달리티를 이용한다. 도 20에 도시된 바와 같이, 독립적인 감지 모달리티는 위치 데이터(예컨대, EM 데이터(93)), 비전 데이터(92), 및/또는 로봇 명령 및 운동학 데이터(94)를 제공할 수 있다. 이들 독립적인 감지 모달리티는 위치의 독립적인 추정치를 제공하도록 구성되는 추정 모듈을 포함할 수 있다. 독립적인 추정치는 이어서, 예를 들어 위치결정 모듈(95)을 사용하여 하나의 내비게이션 출력으로 조합될 수 있고, 이는 시스템에 의해 사용되거나 사용자에게 디스플레이될 수 있다. 이미지-기반 기도 분석 및 매핑은 위치의 독립적인 추정치를 제공할 수 있는, 비전 데이터(92)에 기초한 독립적인 감지 모달리티를 제공할 수 있다. 특히, 일부 경우에, 이미지-기반 기도 분석 및 매핑은, 이미징 장치에 의해 캡처된 하나 이상의 이미지에 기초하여 내강 네트워크의 어느 내강 또는 분지부에 기구의 이미징 장치가 위치되는지를 추정하는 상태/위치 추정 모듈과 감지 모달리티의 조합을 제공한다. 일부 실시예에서, 이미지-기반 기도 분석 및 매핑에 의해 제공되는 추정치는 단독으로 또는 다른 위치 추정치와 함께 사용되어, 시스템에 의해 사용되거나 사용자에게 디스플레이될 수 있는 최종 위치 추정치를 결정할 수 있다. 일부 실시예에서, 본 명세서에 기술된 이미지-기반 기도 분석 및 매핑 시스템 및 방법은 복수의 감지 모달리티를 사용하여 결정되는 이전 위치 추정치에 대한 그의 추정치에 기반할 수 있다. 따라서, 더 높은 품질의 그리고/또는 더욱 신뢰할 수 있는 이미지가 초기 및 후속 위치 추정 프로세스를 지원하고 개량할 수 있다. 이미지 관리 시스템 및 방법은 본 명세서에 기술된 다른 이미지 처리 시스템 및 방법을 보완할 수 있다. 비정보성인 그리고/또는 신뢰할 수 없는 이미지를 식별하는 것은 추가 처리로부터의 그들의 제거를 허용하여, 후속 처리에 대한 필요성을 감소시키고 잠재적으로 (예컨대, 불량한 이미지 품질로 인한) 도움이 되지 않는 또는 부정확한 결과의 수를 감소시킬 수 있다.
이미지 관리는 이미지 내의 하나 이상의 기도를 검출하기 위해 내강 네트워크 내에 위치된 기구의 이미징 장치(315)에 의해 캡처된 하나 이상의 이미지를 분석하는 것을 포함할 수 있다. 도 24는 내강 네트워크의 분지부의 내부의 예시적인 이미지(380)를 제공한다. 예시된 예에서, 이미지(380)는 폐의 기도의 내부 이미지이지만, 이미지(380)는 임의의 유형의 내강 네트워크를 나타낼 수 있다. 2개의 후속 기도(384)가 이미지(380)에서 보여진다. 기도(384)는 이미지가 캡처된 현재 기도에 연결된다.
B. 예시적인
이미지 관리 방법 및 시스템
도 24와 대조적으로, 일부 이미지는 (사람 및/또는 컴퓨터 알고리즘에게) 충분히 명확하지 않거나 신뢰할 수 없을 수 있다. 따라서, 이미지 관리 시스템은 유리하게는 명확한, 신뢰할 수 있는, 그리고/또는 달리 고품질인 이미지를 식별하고 이용하기 위해 채용될 수 있다. 도 25는 분석 시스템(410) 및 의료 기구(420)를 포함하는 예시적인 이미지 관리 시스템(400)을 도시한다. 분석 시스템(410)은 의료 기구에 결합될 수 있다. 예를 들어, 분석 시스템(410)은 의료 기구(420)에 전자적으로 연결될 수 있다. 일부 구성에서, 분석 시스템(410) 및 의료 기구(420)는 동일한 하우징 내에 수용된다.
분석 시스템(410)은 컴퓨터-판독가능 메모리(412) 및 하나 이상의 프로세서(414)를 포함할 수 있다. 메모리(412)는 비-일시적일 수 있고, 프로세서에 의해 실행될 때 이미지 관리 시스템(400)으로 하여금 다양한 기능을 수행하게 하도록 구성되는 실행가능 명령어를 포함할 수 있다. 하나 이상의 프로세서(414)는 메모리(412)와 통신할 수 있고, 본 명세서에 기술된 다양한 기능을 수행하기 위해 명령어를 실행하도록 구성될 수 있다. 제한이 아닌 예로서, 메모리(412) 및/또는 프로세서(414)는 도 1에 도시된 타워(30), 도 1 내지 도 4에 도시된 카트(11), 도 5 내지 도 14에 도시된 베드 등 내에 배치될 수 있다.
의료 기구(420)는 기구 기부(422), 세장형 본체(424), 및/또는 이미징 장치(428)를 포함할 수 있다. 의료 기구(420)는 도 21의 내시경(116), 도 23의 의료 기구(300), 도 1의 내시경(13), 도 3의 요관경(32), 도 9의 복강경(59) 등의 일부 기능을 공유할 수 있다.
의료 기구(420)는 기구 기부(422)에 결합된 세장형 본체(424)를 포함할 수 있다. 세장형 본체(424)의 원위 단부(예컨대, 원위 팁)가 이미징 장치(428)를 포함할 수 있다. 세장형 본체(424)의 원위 단부는 추가적으로 또는 대안적으로 내강 네트워크를 조명하도록 구성된 하나 이상의 조명원(도시되지 않음)을 포함할 수 있다. 본 명세서에 기술된 다른 의료 기구에서와 같이, 세장형 본체(424)의 원위 단부는, 수술 기구가 그것을 통해 기구 샤프트를 따라 그리고/또는 그 내에 삽입되어 기구 팁 부근의 내강 네트워크의 영역에 대한 접근을 허용할 수 있는 의료 기구(420)의 작업 채널로의 개구를 추가로 포함할 수 있다. 이미징 장치(428)는 이미징 장치(315)에 관하여 전술된 다양한 기능을 포함할 수 있다.
도 26은 본 명세서에 기술된 의료 시스템과 조합하여 사용될 수 있는 매핑 시스템(450)을 도시한다. 매핑 시스템(450)은 가상 뷰 생성기 모듈(virtual view generator module)(462), 디스크립터 추출 모듈(descriptor extraction module)(466), 이미지 품질 검출기(474), 디스크립터 추출 모듈(478), 및/또는 디스크립터 매칭 모듈(descriptor matching module)(482)을 포함할 수 있다. 제1 세트의 알고리즘은 가상 뷰 생성기 모듈(462) 및/또는 디스크립터 추출 모듈(466)을 포함할 수 있고, 다른 알고리즘이 하나 이상의 이미지 센서로부터 획득된 이미지 데이터(예컨대, 카메라 이미지 데이터(470)) 내의 피처(feature)를 식별하는 데 도움이 되도록 사용될 수 있는 가상(예컨대, 컴퓨터-생성, 시뮬레이션, 인공 등) 이미지를 생성하고 분석할 수 있다. 제1 세트의 알고리즘은 예컨대 의료 절차 전에 CT 모델(454) 및/또는 내비게이션 융합 데이터(458)에 적용될 수 있다. 따라서, 디스크립터 추출 모듈(466)로부터의 출력은 수술전 데이터로서 저장될 수 있다.
매핑 시스템(450)은 CT 모델(454), 내비게이션 융합 데이터(458), 및/또는 카메라 이미지 데이터(470)를 포함하는 데이터를 수신하도록 구성될 수 있다. CT 모델(454)은 CT에 기초하거나 CT를 모델링하는 가상 이미지를 포함할 수 있다. CT 모델(454)은 컴퓨터 알고리즘(예컨대, 가상 뷰 생성기 모듈(462), 디스크립터 추출 모듈(466), 디스크립터 매칭 모듈(482) 등)에 의해 액세스될 수 있는 수술전 이미지의 데이터베이스를 포함할 수 있다. 내비게이션 융합 데이터(458)는 이미지 데이터, EM 데이터, 및/또는 카메라 이미지(예컨대, 카메라 이미지 데이터(470))와의 비교로부터의 결과와 같은 추가 데이터를 포함할 수 있다.
CT 모델(454) 및/또는 내비게이션 융합 데이터(458)로부터의 데이터는 가상 뷰 생성기 모듈(462)로 전달될 수 있다. 가상 뷰 생성기 모듈(462)은 데이터를 수신하고 내강 네트워크의 가상 모델, 예컨대 내강 네트워크의 2차원(2D) 또는 3차원(3D) 모델을 생성할 수 있다. 가상 뷰 생성기 모듈(462)은 의료 절차 동안 획득될 수 있는 이미지 뷰를 모델링하거나 모사하도록 구성될 수 있다. 생성된 이미지/모델은 디스크립터 추출 모듈 또는 알고리즘(466)으로 전달될 수 있다. 디스크립터 추출 모듈(466)은 생성된 이미지/모델을 수신하고 이미지로부터 현저한 또는 유의미한 피처(예컨대, 디스크립터)를 식별하도록 구성될 수 있다. 예를 들어, 디스크립터 추출 모듈(466)은 이미지(예컨대, 가상 이미지)의 에지, 형상, 컬러 그라데이션(color gradation), 및/또는 다른 양태를 식별하도록 구성될 수 있다. 가상 모델 생성 및 분석에 관련된 추가 정보가 전체적으로 본 명세서에 참고로 포함되는, 2019년 4월 18일자로 공개된 미국 특허 출원 공개 제2019/0110843호에 추가로 기술되어 있다. 디스크립터 추출 모듈(466)로부터 획득된 데이터는 그것이 절차 동안 이용가능하도록 예를 들어 디스크립터 매칭 모듈(482)로 전달될 수 있다.
제2 세트의 알고리즘이 이미지 센서로부터 획득된 이미지 데이터 내의 유의미한 피처(예컨대, 디스크립터)를 식별하도록 궁극적으로 제1 세트의 알고리즘으로부터의 출력(들)과 비교하기 위해 사용될 수 있는 카메라 이미지 데이터(470)를 분석하도록 구성될 수 있다. 위에서 언급된 바와 같이, 의료 기구(420)의 원위 팁/부분에 있는 카메라 또는 다른 이미징 장치(428)로부터의 실시간 이미지 데이터의 분석을 통해, 정보성(informative) 이미지 데이터가 유지되어 의료 기구(420)의 위치를 결정하기 위해 그리고/또는 내강 네트워크를 통해 의료 기구(420)를 내비게이팅하는 데 도움을 주기 위해 사용될 수 있는 상태에서 비정보성 이미지 데이터가 폐기될 수 있다. 제2 세트의 알고리즘이 정보성 이미지와 비정보성 이미지의 방대한 세트를 통해 걸러냄에 따라, 유지된 이미지는 무엇이든 의료 기구(420)의 위치를 더욱 효율적이고 신속하고/하거나 정확하게 결정하는 데 사용된다. 시스템은 이미지가 비정보성인지를 그리고 그에 따라 이미지가 폐기되어야 하는지를 결정하기 위해 하나 이상의 이미지 품질 메트릭(image quality metric)(예컨대, 블러니스, 스페큘러니스(specularness), 피처니스(featureness) 등)에 의존할 수 있다. 각각의 이미지 품질 메트릭 내에서, 이미지가 그러한 이미지 품질 메트릭을 충족하는지 여부에 관한 분석에서 감도 레벨을 확립하도록 임계치가 설정될 수 있다. 이러한 분석의 결과에 기초하여, 이미지는 위치결정 및/또는 내비게이션에 사용하기 위해 유지될 수 있거나, 이미지는 의료 기구(420)의 위치결정에서의 혼란 및/또는 부정확성을 방지하기 위해 폐기될 수 있다. 제2 세트의 알고리즘은 이미지 품질 검출기(474), 디스크립터 추출 모듈(478), 및/또는 디스크립터 매칭 모듈(482)을 포함할 수 있다. 이미지 품질 검출기(474)는 카메라 이미지 데이터(470)를 수신하고, 카메라 이미지 데이터(470)가 하나 이상의 품질 메트릭을 충족하는지를 결정하기 위해 그것을 분석할 수 있다. 이미지 품질 검출기(474)의 특징이 (예컨대, 도 27을 참조하여) 더 상세히 후술된다. 예를 들어, 이미지 품질 검출기(474)는 수신된 이미지에 관련된 블러니스의 정도, 스페큘러니스의 정도, 및/또는 피처니스의 정도를 식별하도록 구성될 수 있다. 이미지가 하나 이상의 대응하는 이미지 품질 메트릭에 기초하여 하나 이상의 임계 품질 메트릭(threshold quality metric)을 통과하지 못하면, 이미지는 거부되고/되거나 폐기될 수 있다. 일부 실시예에서, 품질 메트릭을 통과한 이미지는 디스크립터 추출 모듈(478)에 의해 추가로 분석될 수 있다. 하나 이상의 품질 메트릭의 목표 수(예컨대, 1개, 2개, 3개, 4개 등) 및/또는 목표 조합이 각각의 하나 이상의 임계 품질 메트릭을 충족하면, 이미지가 충분히 신뢰할 수 있고, 정보성이고/이거나, 고품질인 것으로 결정될 수 있다.
디스크립터 추출 모듈(478)은 수신된 이미지로부터 하나 이상의 피처(예컨대, 디스크립터)를 식별하도록 구성될 수 있다. 예를 들어, 디스크립터 추출 모듈(478)은 수신된 이미지 내에서 분지, 곡률, 불규칙성, 또는 다른 현저한 피처를 식별하도록 구성될 수 있다. 디스크립터 추출 모듈(478)은 이어서 이미지 및/또는 연관 디스크립터 데이터를 디스크립터 매칭 모듈(482)로 전달할 수 있다.
디스크립터 매칭 모듈(482)은 디스크립터 추출 모듈(478)로부터 그리고/또는 디스크립터 추출 모듈(466)로부터 이미지 및/또는 디스크립터 데이터를 수신할 수 있다. 디스크립터 매칭 모듈(482)은 내강 네트워크 내의, 본 명세서에 기술된 바와 같은 의료 기구(예컨대, 내시경)의 위치를 식별할 수 있다. 예를 들어, 디스크립터 매칭(482)은 디스크립터 추출 모듈(466)로부터 획득된 하나 이상의 피처를 디스크립터 추출 모듈(478)로부터의 데이터 내에서 식별된 피처와 비교할 수 있다. 일부 예에서, 디스크립터 매칭 모듈(482)은 디스크립터 추출(466, 478)로부터 수신된 피처의 비교를 능률화하기 위해 예상 위치 데이터(예컨대, 모듈(482) 및/또는 모듈(482)에 의해 액세스가능한 메모리에 사전로딩되거나 사전에 저장됨)를 포함할 수 있다. 따라서, 매핑 시스템(450)을 사용하여, 의료 시스템이 하나 이상의 데이터 소스, 예컨대 CT 모델(454), 내비게이션 융합 데이터(458), 및/또는 카메라 이미지 데이터(470)로부터 추출된 디스크립터에 기초하여 내강 네트워크 내의 의료 기구의 위치를 식별하고/하거나 추정할 수 있다.
도 27은 전술된 이미지 관리 시스템을 구현하기 위한 예시적인 방법(500)을 예시한다. 방법(500)은 본 개시 전반에 걸쳐 기술된 다양한 로봇-제어식 시스템 또는 그의 구성요소(들)에서 구현될 수 있다. 방법(500)은 내강 네트워크 내로 삽입되도록 구성되는 세장형 본체를 갖는 기구를 포함하는 로봇 시스템으로 구현될 수 있다. 이미징 장치가 세장형 본체 상에(예컨대, 세장형 본체의 원위 단부 상에) 위치될 수 있다. 기구는 기구를 내강 네트워크를 통해 이동시키도록 구성되는 기구 위치설정 장치(예컨대, 로봇 아암)에 부착될 수 있다. 방법(500)을 채용하는 시스템이 프로세서로 하여금 방법(500)을 실행하게 하는 명령어로 구성된 프로세서를 포함할 수 있다. 방법(500)은 단지 예로서 제공되고, 이미지 관리 방법은 도 27에 도시된 것과는 상이한 단계를 사용하여 구현될 수 있다. 간략함을 위해, 도 27에 예시된 단계는 시스템(예컨대, 본 명세서에 기술된 시스템들 중 하나 또는 본 명세서에 기술된 기법들 중 하나 이상을 수행하도록 구성되는 시스템)에 의해 수행되는 것으로 기술되지만, 단계는 그러한 시스템의 하나 이상의 구성요소 또는 프로세서에 의해 수행될 수 있다.
블록(504)에서, 이미지 관리를 위한 시스템은 장치(예컨대, 이미징 장치(428))로부터, 세장형 본체가 내강 네트워크 내에 있을 때 캡처된 하나 이상의 이미지를 수신한다. 블록(508)에서, 시스템은, 하나 이상의 이미지들 각각에 대해, 내강 네트워크 내의 세장형 본체의 원위 팁 또는 부분의 위치결정을 위한 이미지의 신뢰성을 나타내는 하나 이상의 품질 메트릭을 결정한다. 품질 메트릭의 예가 아래에 제공된다. 블록(512)에서, 시스템은 하나 이상의 품질 메트릭들 각각에 대한 신뢰성 임계 값(reliability threshold value)을 결정한다. 신뢰성 임계 값은 사용자에 의해 공급될 수 있고/있거나 품질 메트릭 및/또는 품질 메트릭의 값에 기초하여 결정될 수 있다. 예를 들어, 임계치는 중요한 품질 메트릭에 대해 상대적으로 높게 설정될 수 있지만, 덜 중요한 품질 메트릭에 대해 더 낮게 설정될 수 있다. 다른 구성이 가능하다. 블록(516)에서, 대응하는 신뢰성 임계 값을 충족하는 이미지에 대한 하나 이상의 메트릭들 각각에 응답하여, 시스템은 원위 팁의 위치에 대해 이미지를 이용한다. 시스템은 기구의 원위 팁의 위치를 결정하기 위해 이미지를 사용할 수 있다. 위치 결정은 도 26에 관하여 기술된 알고리즘 및/또는 (예컨대, 도 20에 관하여) 본 명세서에 기술된 다른 알고리즘에 부분적으로 기초할 수 있다. 시스템은 대응하는 신뢰성 임계 값을 충족하지 않는 이미지에 대한 품질 메트릭들 중 하나 이상에 응답하여 기구의 원위 팁의 위치를 결정하기 위해 이미지를 폐기하거나 달리 그것을 이용하지 않을 수 있다는 것에 유의한다.
일부 예에서, 시스템은 수술전 모델 데이터에 액세스한다. 시스템은 예를 들어 하나 이상의 신뢰성 임계 값을 충족하는 이미지의 기계 학습 모델에 액세스할 수 있다. 추가적으로 또는 대안적으로, 기계 학습 모델은 하나 이상의 신뢰성 임계 값을 충족하지 못한 이미지의 모델을 포함할 수 있다. 기계 학습 모델에 기초하여, 시스템은 하나 이상의 캡처된 이미지들 각각에 대한 하나 이상의 메트릭이 대응하는 신뢰성 임계 값을 충족하는지를 결정할 수 있다. 수술전 모델 데이터는 (예컨대, 의료 기구의 위치에 대응하는 기도 및/또는 랜드마크의 총수(count)를 사용하여) 내강 시스템 내의 의료 장치의 예상 위치를 나타내는 데이터(예컨대, 이미지 데이터)와 같은 다른 데이터를 포함할 수 있다. 예를 들어, 도 27에 예시되지 않지만, 시스템은 내강 네트워크 내에 위치된 기구에 대한 위치 상태 추정치에 액세스할 수 있다. 위치 상태 추정치는 기구가 어느 분지부에 현재 위치되어 있는지의 식별을 포함할 수 있다. 위치 상태는 CT 스캔을 통해 획득된 이미지 데이터에 기초할 수 있다. 위치 상태 추정치 및 수술전 모델 데이터(예컨대, 기계 학습 모델, CT 이미지)에 기초하여, 시스템은 의료 기구의 위치를 결정할 수 있다. 위치 상태 추정치는 예를 들어 도 20의 내비게이션 및 위치결정 시스템(90)에 의해 결정될 수 있다. 위치 상태 추정치는 다양한 및/또는 다수의 위치 감지 모달리티 및 정보, 예컨대 수술전 모델 데이터(91), 비전 데이터(92), EM 데이터(93)(또는 다른 위치 감지 데이터), 및/또는 로봇 명령 및 운동학 데이터(94)에 기초하여 결정될 수 있다. 수술전 모델 데이터를 사용하는 경로의 매핑 및 위치 결정에 관련된 추가 정보가 전체적으로 본 명세서에 참고로 포함되는, 2019년 4월 18일자로 공개된 미국 특허 출원 공개 제2019/0110843호에 추가로 기술되어 있다.
시스템은 이미지가 신뢰할 수 있는지, 정보성인지, 그리고/또는 달리 충분히 고품질인지를 식별하기 위해 복수의 이미지 품질 메트릭을 사용할 수 있다. 예를 들어, 3개 이상의 품질 메트릭이 사용될 수 있다. 각각의 이미지에 대해, 시스템은 2D 이미지를 이미지 내의 이미지 위치의 집합으로 변환할 수 있다. 이미지 위치는 이미지 내의 픽셀에 대응할 수 있다. 픽셀은 2개의 축을 따라 그리드(grid)로 배열될 수 있다. 이미지 위치는  로서 정의될 수 있고, 여기서
로서 정의될 수 있고, 여기서  는 이미지 위치
는 이미지 위치  에 저장된 데이터를 나타내고,
에 저장된 데이터를 나타내고,  및
및  는 각각 이미지의 폭 및 높이를 나타낸다. 이미지 위치에 대해 저장된 데이터는 복수의 요소를 포함하는 벡터로서 저장될 수 있다. 예를 들어,
는 각각 이미지의 폭 및 높이를 나타낸다. 이미지 위치에 대해 저장된 데이터는 복수의 요소를 포함하는 벡터로서 저장될 수 있다. 예를 들어,  는 RGB 이미지 내의 적색, 녹색 및 청색 채널의 값을 저장할 수 있다. "채널"은 이미지 위치에 의해 저장된 변수의 유형을 지칭할 수 있다. 예를 들어, RGB 이미지가 3개의 채널을 갖는 반면, 그레이-스케일 이미지가 1개의 채널을 갖는다.
는 RGB 이미지 내의 적색, 녹색 및 청색 채널의 값을 저장할 수 있다. "채널"은 이미지 위치에 의해 저장된 변수의 유형을 지칭할 수 있다. 예를 들어, RGB 이미지가 3개의 채널을 갖는 반면, 그레이-스케일 이미지가 1개의 채널을 갖는다.
이미지 품질 메트릭은 다양한 메트릭에 관련될 수 있다. 하나의 인자는 이미지 또는 그 내부의 피처가 블러인(blurry) 정도에 관련될 수 있고, 이는 블러니스 또는 블러리니스로 지칭될 수 있다. 다른 인자는 이미지가 얼마나 포화된(saturated) 그리고/또는 워싱 아웃된(washed out) 것으로 나타나는지에 관련될 수 있다. 특히, 이러한 인자는 (예컨대, 광원으로부터) 카메라로의 광의 반사에 의해 유발되는 스페큘러 하이라이트(specular highlight)에 관련될 수 있다. 이러한 인자는 스페큘러니스로 지칭될 수 있다. 또 다른 인자는 이미지 내의 시각적 피처의 현저성이 어느 정도인지에 관련될 수 있고, 이는 피처니스로 지칭될 수 있다. 시각적 피처의 현저성은 이미지 내에서 검출된 시각적 피처의 수에 관련될 수 있다.
블러니스는 다양한 방식으로 획득될 수 있다. 예를 들어, 시스템은 입력 RGB 이미지를 그레이-스케일 이미지로 변환할 수 있다. 따라서, 이미지는 검음 또는 어둠의 정도와 같은 단일 채널에 기초하여 달라질 수 있다. 시스템은 이미지 상의 인근의 그리고/또는 인접한 포인트의 분산(variance)을 결정할 수 있다. 분산은 각각의 이미지 위치와 연관된 벡터에 대해 라플라스 연산자(Laplacian operator)를 수행함으로써 획득될 수 있다. 라플라스 연산자는 행렬  를 생성할 수 있다. 행렬의 분산
를 생성할 수 있다. 행렬의 분산  가 계산될 수 있다. 이로부터, 블러니스
가 계산될 수 있다. 이로부터, 블러니스  가
가  를 사용하여 계산될 수 있고, 여기서
를 사용하여 계산될 수 있고, 여기서  는
는  의 상한이다.
의 상한이다.
스페큘러니스는 전체 이미지와 비교하여 스페큘러 하이라이트를 갖는 이미지 내의 포인트의 비를 구함으로써 획득될 수 있다. 따라서, 스페큘러니스는 이미지 내의 스페큘러 하이라이트 영역의 비 또는 분율일 수 있다. 스페큘러니스는 이미지 내의 각각의 포인트의 포화도(saturation) 및/또는 값에 관련될 수 있다. "포화도"는 일반적으로 유사하게 밝은 백색의 휘도에 대한 포인트의 채도를 지칭할 수 있다. "값"은 컬러의 인지에서의 변화의 정도를 지칭할 수 있다. 스페큘러니스는 하나 이상의 임계치를 충족하는 포인트(예컨대, 픽셀)의 수를 결정함으로써 획득될 수 있다. 예를 들어, 스페큘러 포인트는 임계 포화도 레벨 미만의 포화도를 갖고/갖거나 임계 값 레벨 초과의 값을 갖는 포인트를 지칭할 수 있다.
이미지에 대한 스페큘러니스를 결정하는 것은 이미지를 상이한 유형의 이미지로 변환하는 것을 포함할 수 있다. 변환은 다중-채널 이미지를 상이한 유형의 다중-채널 이미지(예컨대, HSV 이미지)로 변환하는 것을 포함할 수 있다. 예를 들어, RGB 이미지가 HSV 이미지로 변환될 수 있다. 일부 실시예에서, R, G, B 채널 값은 0 내지 1의 범위일 수 있고, 하기 식에 따라 변환될 수 있다:

두문자어 HSV는 색조(Hue), 포화도(Saturation) 및 값(Value)을 나타낸다. 이미지의 각각의 위치는 그의 스페큘러 하이라이트의 레벨에 대해 분석될 수 있다. 포화도 임계치  및/또는 값 임계치
및/또는 값 임계치  은 충분한 스페큘러 하이라이트를 갖는 포인트(예컨대, 픽셀)를 식별하도록 설정될 수 있다. 예를 들어, 픽셀이 (1) 포화도 임계치
은 충분한 스페큘러 하이라이트를 갖는 포인트(예컨대, 픽셀)를 식별하도록 설정될 수 있다. 예를 들어, 픽셀이 (1) 포화도 임계치  미만의 포화도 양을 가질 뿐만 아니라 (2) 값 임계치
미만의 포화도 양을 가질 뿐만 아니라 (2) 값 임계치  미만의 값 양을 갖는 경우에 픽셀이 충분한 스페큘러 하이라이트를 갖는 것으로 식별될 수 있다. 충분한 스페큘러 하이라이트를 갖는 포인트(예컨대, 픽셀)의 총수에 기초하여,
미만의 값 양을 갖는 경우에 픽셀이 충분한 스페큘러 하이라이트를 갖는 것으로 식별될 수 있다. 충분한 스페큘러 하이라이트를 갖는 포인트(예컨대, 픽셀)의 총수에 기초하여,  를 계산함으로써 비가 획득될 수 있고, 여기서 포인트가
를 계산함으로써 비가 획득될 수 있고, 여기서 포인트가  보다 낮은 포화도 양 및
보다 낮은 포화도 양 및  보다 높은 값 양을 갖는 경우에
보다 높은 값 양을 갖는 경우에  이다. 그렇지 않을 경우,
이다. 그렇지 않을 경우,  이다. 사진의 스페큘러니스는 획득되는 이러한 비를 포함할 수 있다.
이다. 사진의 스페큘러니스는 획득되는 이러한 비를 포함할 수 있다.
피처니스는 특정 이미지 내의 다수의 피처를 식별함으로써 결정될 수 있다. 피처의 수는 하나 이상의 피처 검출 알고리즘, 예컨대 SIFT(scale-invariant feature transform), SURF(speeded up robust features), BRIEF(binary robust independent elementary features), FAST(features from accelerated segment test), ORB(oriented FAST and rotated BRIEF), 및/또는 BRISK(binary robust invariant scalable keypoints)를 사용하여 결정될 수 있다. 일부 구현예에서, 해리스 알고리즘(Harris algorithm)(예컨대, 해리스 아핀 영역 검출기(Harris affine region detector))이 이미지 내의, 코너와 같은 피처의 양태를 식별하는 데 사용될 수 있다. 예를 들어, 가우스 커널 필터링(Gaussian kernel filtering)이 하나 이상의 스케일에 대해 사용될 수 있고/있거나 현저한 피처(예컨대, 코너, 에지, 블롭(blob), 리지(ridge) 등)의 위치를 결정하는 것을 추가로 포함할 수 있다. 추가적으로 또는 대안적으로, (예컨대, 소벨(Sobel) 연산자를 사용하는) 소벨 필터와 같은 필터가 에지와 같은 피처의 양태를 식별하고/하거나 검출하는 데 도움을 주기 위해 사용될 수 있다. 피처는 내강 네트워크의 단면, 내강 또는 분지부 내의 불규칙성, 또는 일부 다른 관심 대상의 피처일 수 있다. 이미지 내의 피처는 환경 내의 에지, 코너, 및/또는 다른 구별가능한 요소를 포함할 수 있다. 따라서, 그러한 양태는 이미지 내의 피처의 존재를 결정하기 위해 식별될 수 있다.
위에서 언급된 바와 같이, 신뢰할 수 있고/있거나 정보성인 이미지를 식별하기 위해 하나 이상의 품질 메트릭이 사용될 수 있다. 일부 구성에서, 방법(500)은 전술된 품질 메트릭의 조합(예컨대, 선형 조합(linear combination))을 사용하는 것을 포함할 수 있다. 예를 들어, (1) 블러니스  가 블러니스 임계치
가 블러니스 임계치  보다 크고, (2) 스페큘러니스
보다 크고, (2) 스페큘러니스  가 스페큘러니스 임계치
가 스페큘러니스 임계치  보다 크고, 그리고/또는 (3) 피처니스
보다 크고, 그리고/또는 (3) 피처니스  가 피처니스 임계치
가 피처니스 임계치  보다 작은 경우에 이미지가 비정보성인 그리고/또는 신뢰할 수 없는 것으로 분류될 수 있다. 따라서, 예를 들어, 일부 구현예에서,
보다 작은 경우에 이미지가 비정보성인 그리고/또는 신뢰할 수 없는 것으로 분류될 수 있다. 따라서, 예를 들어, 일부 구현예에서,  ,
,  , 및
, 및  인 경우에 이미지가 신뢰할 수 없는 것으로 결정된다. 일부 구성에서, 품질 메트릭의 선형 조합이 복합 임계치 미만인 복합 메트릭(composite metric)을 생성하는 경우에 이미지는 신뢰할 수 없는 것으로 결정될 수 있다. 복합 메트릭
인 경우에 이미지가 신뢰할 수 없는 것으로 결정된다. 일부 구성에서, 품질 메트릭의 선형 조합이 복합 임계치 미만인 복합 메트릭(composite metric)을 생성하는 경우에 이미지는 신뢰할 수 없는 것으로 결정될 수 있다. 복합 메트릭  는 각각의 품질 메트릭에 대응하는 하나 이상의 가중 인자(weighting factor)를 사용하여 결정될 수 있다. 가중 인자는 선형 가중 인자일 수 있지만, 다른 변형이 가능하다. 예를 들어, 복합 메트릭
는 각각의 품질 메트릭에 대응하는 하나 이상의 가중 인자(weighting factor)를 사용하여 결정될 수 있다. 가중 인자는 선형 가중 인자일 수 있지만, 다른 변형이 가능하다. 예를 들어, 복합 메트릭  는
는  를 사용하여 결정될 수 있다. 여기서,
를 사용하여 결정될 수 있다. 여기서,  ,
,  , 및
, 및  는 각각의 품질 메트릭(예컨대, 블러니스
는 각각의 품질 메트릭(예컨대, 블러니스  , 스페큘러니스
, 스페큘러니스  , 피처니스
, 피처니스  )에 대한 각각의 가중 파라미터(weighting parameter)를 나타낸다. 일부 구현예에서, 한계 값
)에 대한 각각의 가중 파라미터(weighting parameter)를 나타낸다. 일부 구현예에서, 한계 값  가 내시경 이미지 내에서 검출되는 피처의 수의 상한을 나타낼 수 있다. 가중 파라미터는 일 세트의 대표 이미지의 분석에 기초하여 선택될 수 있다. 따라서, 가중 파라미터는 본 명세서에 기술된 수술전 데이터에 포함될 수 있다.
가 내시경 이미지 내에서 검출되는 피처의 수의 상한을 나타낼 수 있다. 가중 파라미터는 일 세트의 대표 이미지의 분석에 기초하여 선택될 수 있다. 따라서, 가중 파라미터는 본 명세서에 기술된 수술전 데이터에 포함될 수 있다.
위에서 언급된 바와 같이, 일부 구성에서, 시스템은 추가적으로 또는 대안적으로 전술된 품질 메트릭들 중 하나 이상을 결정하기 위해 기계 학습(ML) 알고리즘을 구현할 수 있다. 기계 학습 알고리즘은 세분화된(granular)(예컨대, 픽셀-레벨) 이미지 데이터에 추가적으로 또는 대안적으로 이미지의 전체론적 정보(holistic information)를 캡처하도록 구성될 수 있다. ML 알고리즘은 신뢰할 수 있는 그리고/또는 정보성인 이미지를 식별하도록 구성될 수 있다. 추가적으로 또는 대안적으로, ML 알고리즘은 신뢰할 수 없는 그리고/또는 비정보성인 이미지를 식별하도록 구성될 수 있다.
ML 알고리즘은 "굿(good)"(예컨대, 정보성인, 신뢰할 수 있는) 및/또는 "배드(bad)"(예컨대, 비정보성인, 신뢰할 수 없는) 이미지에 대해 사전에 훈련될 수 있다. 훈련 알고리즘은 랜덤 포레스트(Random Forest), 서포트 벡터 머신(Support Vector Machine) 또는 컨볼루션 신경망(Convolutional Neural Network, CNN)과 같은 분류자를 사용할 수 있다. 따라서, "굿" 및/또는 "배드" 이미지는 훈련된 분류자에 기초하여 결정될 수 있다.
일단 훈련되면, ML 알고리즘 또는 모델은 시스템(예컨대, 메모리(412))에 저장될 수 있다. 기계 학습 알고리즘의 일부 예는 (예를 들어, 일반 최소 제곱 회귀와 같은) 회귀 알고리즘, (예를 들어, 학습 벡터 양자화와 같은) 인스턴스-기반 알고리즘, (예를 들어, 분류 및 회귀 트리(tree)와 같은) 결정 트리 알고리즘, (예를 들어, 나이브 베이즈(Naive Bayes)와 같은) 베이지안 알고리즘(Bayesian algorithm), (예를 들어, k-평균 클러스터링(k-means clustering)과 같은) 클러스터링 알고리즘, (예를 들어, 선험적 알고리즘과 같은) 연관 규칙 학습 알고리즘, (예를 들어, 퍼셉트론(Perceptron)과 같은) 인공 신경망 알고리즘, (예를 들어, 딥 볼츠만 머신(Deep Boltzmann Machine) 또는 심층 신경망과 같은) 심층 학습 알고리즘, (예를 들어, 주요 성분 분석과 같은) 차원 축소 알고리즘, (예를 들어, 누적된 일반화와 같은) 앙상블 알고리즘(ensemble algorithm), 및/또는 다른 기계 학습 알고리즘을 포함하는, 지도(supervised) 또는 비-지도(non-supervised) 기계 학습 알고리즘을 포함한다.
위에서 언급된 바와 같이, 방법(500)은 기계 학습 모델에 액세스하는 것 및 모델을 사용하여 각각의 이미지에 대한 품질 메트릭(들)이 대응하는 신뢰성 임계 값(들)을 충족하는지를 결정하는 것을 포함할 수 있다. 기계 학습 모델은 하나 이상의 내강 네트워크 내의 분지를 식별하도록 훈련된 컨볼루션 신경망을 포함할 수 있다. 기계 학습 모델은 내강 네트워크의 시뮬레이션된 이미지에 적어도 부분적으로 기초할 수 있다. 예를 들어, 시뮬레이션된 이미지는 2차원 또는 3차원에 걸친 내강 네트워크의 적어도 하나의 컴퓨터-생성 이미지를 포함할 수 있다. 예를 들어, 기계 학습 모델은 CT 스캔으로부터 수집된 이미지에 적어도 부분적으로 기초할 수 있다. 시뮬레이션된 이미지는 내강 네트워크 내에서 시뮬레이션된 관점을 묘사할 수 있다. 추가적으로 또는 대안적으로, 이미지 데이터는 (예컨대, 환자 내의 기관지 네트워크로부터의) 비디오 이미지를 포함할 수 있다.
ML 알고리즘은 다수의 방식으로 훈련될 수 있다. 예를 들어, 시스템은 내강 네트워크의 3D 표현에 액세스할 수 있다. 시스템은 내강 네트워크의 내부의 하나 이상의 이미지에 액세스할 수 있다. 일부 구성에서, 시스템은 내강 네트워크의 내부의 이미지 및 내강 네트워크의 3D 표현에 기초하여, 각각의 이미지와 3D 표현 내의 대응하는 위치 사이의 매핑을 결정할 수 있다. 시스템은 매핑에 기초하여, ML 알고리즘에 제시된 이미지 데이터 내에서, 내강 네트워크의 대응하는 분지 및/또는 내강 네트워크 내의 대응하는 분지의 위치를 식별하기 위해 가중 파라미터를 설정할 수 있다. 추가적으로 또는 대안적으로, 시스템은 입자 필터에 기초하여, 이미지 내의 하나 이상의 피처를 예측할 수 있다.
IV. 구현
시스템 및 용어
본 명세서에 개시된 구현예는 로봇-제어식 의료 기구의 내비게이션을 위한 이미지 관리를 위한 시스템, 방법 및 장치를 제공한다. 본 명세서에 기술된 다양한 구현예는 내강 네트워크의 개선된 이미지 관리 및 내비게이션을 제공한다.
본 명세서에 사용되는 바와 같은 용어 "결합하다", "결합하는", "결합된" 또는 단어 결합하다의 다른 변형은 간접적인 연결 또는 직접적인 연결을 나타낼 수 있다는 것에 유의하여야 한다. 예를 들어, 제1 구성요소가 제2 구성요소에 "결합된" 경우, 제1 구성요소는 다른 구성요소를 통해 제2 구성요소에 간접적으로 연결되거나 제2 구성요소에 직접적으로 연결될 수 있다.
본 명세서에 기술된 이미지 데이터, 분석 및/또는 관리 알고리즘, 기계 학습 모델(들), 위치 추정, 및/또는 로봇 운동 작동 기능은 프로세서-판독가능 또는 컴퓨터-판독가능 매체 상에 하나 이상의 명령어로서 저장될 수 있다. 용어 "컴퓨터-판독가능 매체"는 컴퓨터 또는 프로세서에 의해 액세스될 수 있는 임의의 이용가능한 매체를 지칭한다. 제한이 아닌 예로서, 그러한 매체는 랜덤 액세스 메모리(RAM), 판독-전용 메모리(ROM), 전기적 소거가능 프로그램가능 판독-전용 메모리(EEPROM), 플래시 메모리, 콤팩트 디스크 판독-전용 메모리(CD-ROM) 또는 다른 광학 디스크 저장 장치, 자기 디스크 저장 장치 또는 다른 자기 저장 장치, 또는 명령어 또는 데이터 구조의 형태로 원하는 프로그램 코드를 저장하는 데 사용될 수 있고 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있다. 컴퓨터-판독가능 매체는 유형적이고 비-일시적일 수 있음에 유의하여야 한다. 본 명세서에 사용되는 바와 같이, 용어 "코드"는 컴퓨팅 장치 또는 프로세서에 의해 실행가능한 소프트웨어, 명령어, 코드 또는 데이터를 지칭할 수 있다.
본 명세서에 개시된 방법은 기술된 방법을 달성하기 위한 하나 이상의 단계 또는 동작을 포함한다. 방법 단계 및/또는 동작은 청구범위의 범주로부터 벗어남이 없이 서로 교환될 수 있다. 다시 말하면, 기술되는 방법의 적절한 작동을 위해 특정 순서의 단계 또는 동작이 요구되지 않는 한, 특정 단계 및/또는 동작의 순서 및/또는 사용은 청구범위의 범주로부터 벗어남이 없이 수정될 수 있다.
본 명세서에 사용되는 바와 같이, 용어 "복수"는 2개 이상을 나타낸다. 예를 들어, 복수의 구성요소는 2개 이상의 구성요소를 나타낸다. 용어 "결정하는"은 매우 다양한 동작을 포함하며, 따라서 "결정하는"은 계산, 컴퓨팅, 처리, 도출, 조사, 검색(예컨대, 테이블, 데이터베이스 또는 다른 데이터 구조에서의 검색), 확인 등을 포함할 수 있다. 또한, "결정하는"은 수신(예컨대, 정보를 수신함), 액세스(예컨대, 메모리의 데이터에 액세스함) 등을 포함할 수 있다. 또한, "결정하는"은 해석, 선택, 선정, 설정 등을 포함할 수 있다.
어구 "~에 기초한"은, 달리 명백히 명시되지 않는 한, "단지 ~에 기초한"을 의미하지는 않는다. 다시 말하면, 어구 "~에 기초한"은 "단지 ~에 기초한" 및 "적어도 ~에 기초한" 둘 모두를 기술한다.
개시된 구현예의 이전의 설명은 당업자가 본 발명을 제조하거나 사용하는 것을 가능하게 하도록 제공된다. 이들 구현예에 대한 다양한 수정은 당업자에게 용이하게 명백해질 것이고, 본 명세서에서 정의된 일반적인 원리는 본 발명의 범주로부터 벗어남이 없이 다른 구현예에 적용될 수 있다. 예를 들어, 당업자가 다수의 대응하는 대안적인 그리고 동등한 구조적 상세사항, 예컨대 도구 구성요소를 체결, 장착, 결합, 또는 맞물리게 하는 동등한 방식, 특정 작동 운동을 생성하기 위한 동등한 메커니즘, 및 전기 에너지를 전달하기 위한 동등한 메커니즘을 채용할 수 있을 것임이 인식될 것이다. 따라서, 본 발명은 본 명세서에 도시된 구현예로 제한되도록 의도되는 것이 아니라, 본 명세서에 개시된 원리 및 신규한 특징과 일치하는 가장 넓은 범주에 따른다.
Claims (27)
- 시스템으로서,
내강 네트워크(luminal network) 내로 삽입되도록 구성되는 세장형 본체(elongate body), 및
상기 세장형 본체의 원위 팁(distal tip)에 위치되는 이미징 장치(imaging device)
를 포함하는 기구(instrument);
실행가능 명령어들을 저장한 적어도 하나의 컴퓨터-판독가능 메모리; 및
상기 적어도 하나의 컴퓨터-판독가능 메모리와 통신하고, 상기 명령어들을 실행하여 상기 시스템으로 하여금 적어도,
상기 이미징 장치로부터, 상기 세장형 본체가 상기 내강 네트워크 내에 있을 때 캡처된 하나 이상의 이미지들을 수신하게 하고;
상기 하나 이상의 이미지들 각각에 대해, 상기 내강 네트워크 내의 상기 세장형 본체의 상기 원위 팁의 위치결정을 위한 이미지의 신뢰성을 나타내는 하나 이상의 메트릭들(metrics)을 결정하게 하고;
상기 하나 이상의 메트릭들 각각에 대한 신뢰성 임계 값(reliability threshold value)을 결정하게 하고;
대응하는 신뢰성 임계 값을 충족하는 상기 이미지에 대한 상기 하나 이상의 메트릭들 각각에 응답하여, 상기 원위 팁의 상기 위치결정을 위해 상기 이미지를 이용하게 하도록 구성되는 하나 이상의 프로세서들을 포함하는, 시스템. - 제1항에 있어서, 상기 하나 이상의 프로세서들은 상기 명령어들을 실행하여 상기 시스템으로 하여금 적어도,
하나 이상의 신뢰성 임계 값들을 충족하는 이미지들의 기계 학습 모델(machine learning model)에 액세스하게 하고;
상기 기계 학습 모델에 기초하여, 상기 하나 이상의 캡처된 이미지들 각각에 대한 상기 하나 이상의 메트릭들이 상기 대응하는 신뢰성 임계 값들을 충족하는지를 결정하게 하도록
구성되는, 시스템. - 제2항에 있어서, 상기 기계 학습 모델은 (i) 상기 대응하는 신뢰성 임계 값들을 충족하는 하나 이상의 메트릭들을 가진 이미지들과 (ii) 상기 대응하는 신뢰성 임계 값들을 충족하지 않는 하나 이상의 메트릭들을 가진 이미지들을 구별하도록 훈련된 컨볼루션 신경망(convolutional neural network)을 포함하는, 시스템.
- 제1항에 있어서, 상기 하나 이상의 메트릭들은,
상기 이미지 내의 블러(blur)의 레벨을 나타내는 제1 메트릭;
상기 이미지 내의 스페큘러 하이라이트들(specular highlights)의 양을 나타내는 제2 메트릭; 및
상기 이미지 내의 시각적 피처들(visual features)의 가용성을 나타내는 제3 메트릭
중 적어도 하나를 포함하는, 시스템. - 제4항에 있어서, 상기 이미지의 상기 이용은,
상기 제1 메트릭에 제1 가중 파라미터(weighting parameter)를 할당하는 것;
상기 제2 메트릭에 제2 가중 파라미터를 할당하는 것;
상기 제3 메트릭에 제3 가중 파라미터를 할당하는 것; 및
상기 각각의 제1, 제2 및 제3 가중 파라미터들과의 상기 제1, 제2 및 제3 메트릭들의 선형 조합(linear combination)에 기초하여, 상기 원위 팁의 상기 위치결정을 위한 상기 이미지의 상기 신뢰성을 나타내는 복합 메트릭(composite metric)을 결정하는 것을 포함하는, 시스템. - 제4항에 있어서, 상기 하나 이상의 메트릭들을 결정하는 것은,
상기 이미지의 2차원 좌표들에 대응하는 이미지 값들을 식별하는 것을 포함하고,
각각의 이미지 값은 상기 대응하는 좌표에서의 컬러 값들에 기초하는, 시스템. - 제6항에 있어서, 상기 하나 이상의 메트릭들을 결정하는 것은,
상기 이미지의 수정된 이미지에 대해 라플라스 연산자(Laplacian operator)를 수행하여 행렬을 획득하는 것; 및
상기 수정된 이미지와 연관된 상기 행렬의 분산(variance)을 결정하는 것
에 기초하여 상기 제1 메트릭을 결정하는 것을 포함하는, 시스템. - 제6항에 있어서, 상기 하나 이상의 메트릭들을 결정하는 것은,
상기 이미지에 대한 포화도(saturation) 및 명도(lightness) 값들을 결정하는 것; 및
상기 이미지의 영역에 대한 포화도 또는 값 중 적어도 하나의 비를 결정하는 것
에 기초하여 상기 제2 메트릭을 결정하는 것을 포함하는, 시스템. - 제8항에 있어서, 상기 제2 메트릭을 결정하는 것은 상기 이미지의 제1 포인트와 제2 포인트 사이의 명도 값들의 분산을 결정하는 것을 포함하고, 상기 제1 포인트와 제2 포인트는 서로 인접한, 시스템.
- 제8항에 있어서, 상기 제2 메트릭을 결정하는 것은 임계 포화도 레벨 미만의 포화도 값을 갖는 다수의 픽셀들을 식별하는 것을 포함하는, 시스템.
- 제6항에 있어서, 상기 하나 이상의 메트릭들을 결정하는 것은,
상기 이미지 내의 다수의 피처들을 식별하기 위해 SIFT, SURF, BRIEF, BRISK, 또는 FAST 중 적어도 하나를 사용하는 것에 기초하여 상기 제3 메트릭을 결정하는 것을 포함하는, 시스템. - 제6항에 있어서, 다수의 피처들을 식별하는 것은 상기 이미지 내의 에지 또는 코너 중 적어도 하나를 식별하는 것을 포함하는, 시스템.
- 제1항에 있어서, 상기 이미지의 상기 이용은 상기 하나 이상의 이미지들 각각에, 상기 하나 이상의 메트릭들에 기초하고 상기 원위 팁의 상기 위치결정을 위한 상기 이미지의 상기 신뢰성을 나타내는 신뢰성 인자(reliability factor)를 할당하는 것을 포함하는, 시스템.
- 제1항에 있어서, 상기 하나 이상의 프로세서들은 상기 명령어들을 실행하여 상기 시스템으로 하여금, 상기 하나 이상의 메트릭들에 대응하는 상기 신뢰성 임계 값들 각각을 사용자로부터 수신하게 하도록 추가로 구성되는, 시스템.
- 제1항에 있어서, 상기 하나 이상의 프로세서들은 상기 명령어들을 실행하여 상기 시스템으로 하여금, 상기 하나 이상의 메트릭들의 대응하는 제1 및 제2 메트릭들에 기초하여 제2 신뢰성 임계 값보다 높은 제1 신뢰성 임계 값을 자동으로 설정하게 하도록 추가로 구성되는, 시스템.
- 제1항에 있어서, 상기 하나 이상의 프로세서들은 상기 명령어들을 실행하여 상기 시스템으로 하여금, 가상 이미지들을 포함하는 수술전 모델 데이터에 액세스하게 하도록 추가로 구성되는, 시스템.
- 제16항에 있어서, 수술전 모델 데이터에 액세스하는 것은 상기 세장형 본체가 상기 내강 네트워크 내에 있을 때 캡처된 상기 하나 이상의 이미지들을 상기 가상 이미지들과 비교하는 것을 포함하는, 시스템.
- 제17항에 있어서, 상기 하나 이상의 프로세서들은 상기 명령어들을 실행하여 상기 시스템으로 하여금, 상기 세장형 본체가 상기 내강 네트워크 내에 있을 때 캡처된 상기 하나 이상의 이미지들을 상기 가상 이미지들과 비교한 것에 기초하여 상기 내강 네트워크 내의 상기 세장형 본체의 위치를 결정하게 하도록 추가로 구성되는, 시스템.
- 방법으로서,
세장형 기구의 원위 단부에 배치된 이미지 장치를 사용하여, 상기 세장형 기구가 내강 네트워크 내에 있을 때 캡처된 하나 이상의 이미지들을 수신하는 단계;
하나 이상의 임계 품질 메트릭들(threshold quality metrics)을 충족하는 이미지들에 대해 훈련된 기계 학습 모델에 액세스하는 단계; 및
상기 기계 학습 모델에 기초하여, 상기 하나 이상의 이미지들이 상기 하나 이상의 임계 품질 메트릭들을 충족하는지를 결정하는 단계를 포함하는, 방법. - 제19항에 있어서, 상기 기계 학습 모델에 기초하여, 상기 내강 네트워크 내의 상기 세장형 기구의 상기 원위 단부의 위치결정을 위한 이미지의 신뢰성을 나타내는 하나 이상의 품질 메트릭들을 결정하는 단계를 추가로 포함하는, 방법.
- 제19항에 있어서, 상기 하나 이상의 임계 품질 메트릭들을 결정하는 단계를 추가로 포함하는, 방법.
- 제19항에 있어서, 상기 이미지의 하나 이상의 품질 메트릭들 중 적어도 하나가 상기 대응하는 하나 이상의 임계 품질 메트릭들을 충족하지 못한다는 결정에 응답하여 상기 이미지를 상기 원위 단부의 위치결정을 위해 사용되는 것으로부터 필터링하는 단계를 추가로 포함하는, 방법.
- 제19항에 있어서, 상기 내강 네트워크 내의 상기 세장형 기구의 위치를 결정하는 단계를 추가로 포함하는, 방법.
- 제23항에 있어서, 상기 내강 네트워크 내의 상기 세장형 기구의 상기 위치를 결정하는 단계는 상기 하나 이상의 캡처된 이미지들을 내강 네트워크의 수술전 이미지들과 비교하는 단계를 포함하는, 방법.
- 제24항에 있어서, 상기 수술전 이미지들은 컴퓨터-생성 이미지들을 포함하는, 방법.
- 제24항에 있어서, 상기 수술전 이미지들은 컴퓨터 단층촬영(computerized tomography, CT) 스캔으로부터 획득된 이미지들을 포함하는, 방법.
- 시스템으로서,
내강 네트워크 내로 삽입되도록 구성되는 세장형 본체, 및
상기 세장형 본체의 원위 팁에 위치되는 이미징 장치
를 포함하는 기구;
실행가능 명령어들을 저장한 적어도 하나의 컴퓨터-판독가능 메모리; 및
상기 적어도 하나의 컴퓨터-판독가능 메모리와 통신하고, 상기 명령어들을 실행하여 상기 시스템으로 하여금 적어도,
상기 이미징 장치로부터, 상기 세장형 본체가 상기 내강 네트워크 내에 있을 때 캡처된 하나 이상의 이미지들을 수신하게 하고;
상기 하나 이상의 이미지들 각각에 대해, 상기 내강 네트워크 내의 상기 세장형 본체의 상기 원위 팁의 위치결정을 위한 이미지의 신뢰성을 나타내고 상기 이미지 내의 블러의 레벨을 나타내는 적어도 제1 메트릭을 포함하는 하나 이상의 메트릭들을 결정하게 하고;
상기 하나 이상의 메트릭들 각각에 대한 신뢰성 임계 값을 결정하게 하고;
대응하는 신뢰성 임계 값을 충족하는 상기 이미지에 대한 상기 하나 이상의 메트릭들 각각에 응답하여, 상기 원위 팁의 상기 위치결정을 위해 상기 이미지를 이용하게 하도록 구성되는 하나 이상의 프로세서들을 포함하는, 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201962894601P | 2019-08-30 | 2019-08-30 | |
| US62/894,601 | 2019-08-30 | ||
| PCT/IB2020/058023 WO2021038495A1 (en) | 2019-08-30 | 2020-08-27 | Instrument image reliability systems and methods |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20220058918A true KR20220058918A (ko) | 2022-05-10 |
Family
ID=74680694
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227010429A KR20220058918A (ko) | 2019-08-30 | 2020-08-27 | 기구 이미지 신뢰성 시스템 및 방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11147633B2 (ko) |
| EP (1) | EP4021329A4 (ko) |
| JP (1) | JP7451686B2 (ko) |
| KR (1) | KR20220058918A (ko) |
| CN (1) | CN114340540B (ko) |
| WO (1) | WO2021038495A1 (ko) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114340540B (zh) * | 2019-08-30 | 2023-07-04 | 奥瑞斯健康公司 | 器械图像可靠性系统和方法 |
| US11903561B2 (en) * | 2021-05-03 | 2024-02-20 | Iemis (Hk) Limited | Surgical systems and devices, and methods for configuring surgical systems and performing endoscopic procedures, including ERCP procedures |
| WO2022258153A1 (en) * | 2021-06-08 | 2022-12-15 | Azyro Sa | Medical treatment device, system, and console |
| CN114757897B (zh) * | 2022-03-30 | 2024-04-09 | 柳州欧维姆机械股份有限公司 | 一种改善桥梁缆索锚固区成像效果的方法 |
| CN117710375B (zh) * | 2024-02-05 | 2024-04-12 | 常州市南方电机有限公司 | 一种电机转子与定子的对中性检测方法及系统 |
Family Cites Families (422)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4745908A (en) | 1987-05-08 | 1988-05-24 | Circon Corporation | Inspection instrument fexible shaft having deflection compensation means |
| JP2750201B2 (ja) | 1990-04-13 | 1998-05-13 | オリンパス光学工業株式会社 | 内視鏡の挿入状態検出装置 |
| US5550953A (en) | 1994-04-20 | 1996-08-27 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | On-line method and apparatus for coordinated mobility and manipulation of mobile robots |
| US5603318A (en) | 1992-04-21 | 1997-02-18 | University Of Utah Research Foundation | Apparatus and method for photogrammetric surgical localization |
| US5526812A (en) | 1993-06-21 | 1996-06-18 | General Electric Company | Display system for enhancing visualization of body structures during medical procedures |
| US6059718A (en) | 1993-10-18 | 2000-05-09 | Olympus Optical Co., Ltd. | Endoscope form detecting apparatus in which coil is fixedly mounted by insulating member so that form is not deformed within endoscope |
| AU3950595A (en) | 1994-10-07 | 1996-05-06 | St. Louis University | Surgical navigation systems including reference and localization frames |
| US6690963B2 (en) | 1995-01-24 | 2004-02-10 | Biosense, Inc. | System for determining the location and orientation of an invasive medical instrument |
| US6246898B1 (en) | 1995-03-28 | 2001-06-12 | Sonometrics Corporation | Method for carrying out a medical procedure using a three-dimensional tracking and imaging system |
| CA2231425A1 (en) | 1995-09-20 | 1997-03-27 | Texas Heart Institute | Detecting thermal discrepancies in vessel walls |
| WO1997029709A1 (en) | 1996-02-15 | 1997-08-21 | Biosense, Inc. | Medical procedures and apparatus using intrabody probes |
| US6203493B1 (en) | 1996-02-15 | 2001-03-20 | Biosense, Inc. | Attachment with one or more sensors for precise position determination of endoscopes |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6047080A (en) | 1996-06-19 | 2000-04-04 | Arch Development Corporation | Method and apparatus for three-dimensional reconstruction of coronary vessels from angiographic images |
| US5831614A (en) | 1996-07-01 | 1998-11-03 | Sun Microsystems, Inc. | X-Y viewport scroll using location of display with respect to a point |
| JP2000509626A (ja) | 1997-01-24 | 2000-08-02 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 画像表示システム |
| US6246784B1 (en) | 1997-08-19 | 2001-06-12 | The United States Of America As Represented By The Department Of Health And Human Services | Method for segmenting medical images and detecting surface anomalies in anatomical structures |
| US6810281B2 (en) | 2000-12-21 | 2004-10-26 | Endovia Medical, Inc. | Medical mapping system |
| FR2779339B1 (fr) | 1998-06-09 | 2000-10-13 | Integrated Surgical Systems Sa | Procede et appareil de mise en correspondance pour la chirurgie robotisee, et dispositif de mise en correspondance en comportant application |
| US6425865B1 (en) | 1998-06-12 | 2002-07-30 | The University Of British Columbia | Robotically assisted medical ultrasound |
| WO2000028882A2 (en) | 1998-11-18 | 2000-05-25 | Microdexterity Systems, Inc. | Medical manipulator for use with an imaging device |
| US6493608B1 (en) | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US6501981B1 (en) | 1999-03-16 | 2002-12-31 | Accuray, Inc. | Apparatus and method for compensating for respiratory and patient motions during treatment |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US7386339B2 (en) | 1999-05-18 | 2008-06-10 | Mediguide Ltd. | Medical imaging and navigation system |
| US9572519B2 (en) | 1999-05-18 | 2017-02-21 | Mediguide Ltd. | Method and apparatus for invasive device tracking using organ timing signal generated from MPS sensors |
| US6466198B1 (en) | 1999-11-05 | 2002-10-15 | Innoventions, Inc. | View navigation and magnification of a hand-held device with a display |
| FI114282B (fi) | 1999-11-05 | 2004-09-30 | Polar Electro Oy | Menetelmä, järjestely ja sykemittari sydämen lyönnin tunnistamiseksi |
| US6755797B1 (en) | 1999-11-29 | 2004-06-29 | Bowles Fluidics Corporation | Method and apparatus for producing oscillation of a bladder |
| US7747312B2 (en) | 2000-01-04 | 2010-06-29 | George Mason Intellectual Properties, Inc. | System and method for automatic shape registration and instrument tracking |
| DE10011790B4 (de) | 2000-03-13 | 2005-07-14 | Siemens Ag | Medizinisches Instrument zum Einführen in ein Untersuchungsobjekt, sowie medizinisches Untersuchungs- oder Behandlungsgerät |
| US7181289B2 (en) | 2000-03-20 | 2007-02-20 | Pflueger D Russell | Epidural nerve root access catheter and treatment methods |
| DE10025285A1 (de) | 2000-05-22 | 2001-12-06 | Siemens Ag | Vollautomatische, robotergestützte Kameraführung unter Verwendung von Positionssensoren für laparoskopische Eingriffe |
| DE10033723C1 (de) | 2000-07-12 | 2002-02-21 | Siemens Ag | Visualisierung von Positionen und Orientierung von intrakorporal geführten Instrumenten während eines chirurgischen Eingriffs |
| JP4863243B2 (ja) | 2001-07-18 | 2012-01-25 | 内山工業株式会社 | エンコーダ付密封装置 |
| US6865498B2 (en) | 2001-11-30 | 2005-03-08 | Thermwood Corporation | System for calibrating the axes on a computer numeric controlled machining system and method thereof |
| US6812842B2 (en) | 2001-12-20 | 2004-11-02 | Calypso Medical Technologies, Inc. | System for excitation of a leadless miniature marker |
| US8095200B2 (en) | 2002-03-06 | 2012-01-10 | Mako Surgical Corp. | System and method for using a haptic device as an input device |
| DE10210646A1 (de) | 2002-03-11 | 2003-10-09 | Siemens Ag | Verfahren zur Bilddarstellung eines in einen Untersuchungsbereich eines Patienten eingebrachten medizinischen Instruments |
| US20050256398A1 (en) | 2004-05-12 | 2005-11-17 | Hastings Roger N | Systems and methods for interventional medicine |
| EP3189781A1 (en) | 2002-04-17 | 2017-07-12 | Covidien LP | Endoscope structures and techniques for navigating to a target in branched structure |
| US7998062B2 (en) | 2004-03-29 | 2011-08-16 | Superdimension, Ltd. | Endoscope structures and techniques for navigating to a target in branched structure |
| AU2003247338A1 (en) | 2002-04-25 | 2003-11-10 | The John Hopkins University | Robot for computed tomography interventions |
| JP2005528157A (ja) | 2002-06-04 | 2005-09-22 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 回転血管造影法に基づく冠状動脈構造のハイブリッド3d再構成 |
| JP4439393B2 (ja) | 2002-06-17 | 2010-03-24 | メイザー サージカル テクノロジーズ リミテッド | 整形外科的インサートと併用するロボット |
| WO2004000151A1 (en) | 2002-06-25 | 2003-12-31 | Michael Nicholas Dalton | Apparatus and method for superimposing images over an object |
| KR100449765B1 (ko) | 2002-10-12 | 2004-09-22 | 삼성에스디아이 주식회사 | 리튬전지용 리튬메탈 애노드 |
| US6899672B2 (en) | 2002-11-08 | 2005-05-31 | Scimed Life Systems, Inc. | Endoscopic imaging system including removable deflection device |
| JP4804005B2 (ja) | 2002-11-13 | 2011-10-26 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 境界構造を検出するための医用ビューイングシステム及び方法 |
| US7599730B2 (en) | 2002-11-19 | 2009-10-06 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US7697972B2 (en) | 2002-11-19 | 2010-04-13 | Medtronic Navigation, Inc. | Navigation system for cardiac therapies |
| US20040186349A1 (en) | 2002-12-24 | 2004-09-23 | Usgi Medical Corp. | Apparatus and methods for achieving endoluminal access |
| FR2852226B1 (fr) | 2003-03-10 | 2005-07-15 | Univ Grenoble 1 | Instrument medical localise a ecran orientable |
| US7203277B2 (en) | 2003-04-25 | 2007-04-10 | Brainlab Ag | Visualization device and method for combined patient and object image data |
| US7822461B2 (en) | 2003-07-11 | 2010-10-26 | Siemens Medical Solutions Usa, Inc. | System and method for endoscopic path planning |
| EP2316328B1 (en) | 2003-09-15 | 2012-05-09 | Super Dimension Ltd. | Wrap-around holding device for use with bronchoscopes |
| US7835778B2 (en) | 2003-10-16 | 2010-11-16 | Medtronic Navigation, Inc. | Method and apparatus for surgical navigation of a multiple piece construct for implantation |
| US20050097557A1 (en) | 2003-10-31 | 2005-05-05 | International Business Machines Corporation | Methods and apparatus for making web browser act like stand-alone application |
| WO2005058137A2 (en) | 2003-12-12 | 2005-06-30 | University Of Washington | Catheterscope 3d guidance and interface system |
| JP2005192632A (ja) | 2003-12-26 | 2005-07-21 | Olympus Corp | 被検体内移動状態検出システム |
| US8021301B2 (en) | 2003-12-26 | 2011-09-20 | Fujifilm Corporation | Ultrasonic image processing apparatus, ultrasonic image processing method and ultrasonic image processing program |
| US20050193451A1 (en) | 2003-12-30 | 2005-09-01 | Liposonix, Inc. | Articulating arm for medical procedures |
| EP1715788B1 (en) | 2004-02-17 | 2011-09-07 | Philips Electronics LTD | Method and apparatus for registration, verification, and referencing of internal organs |
| FI20040255A (fi) | 2004-02-18 | 2005-08-19 | Jurilab Ltd Oy | Menetelmä pre-eklampsian riskin havaitsemiseksi |
| US7974681B2 (en) | 2004-03-05 | 2011-07-05 | Hansen Medical, Inc. | Robotic catheter system |
| WO2005087128A1 (en) | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US7811294B2 (en) | 2004-03-08 | 2010-10-12 | Mediguide Ltd. | Automatic guidewire maneuvering system and method |
| WO2005094665A2 (en) | 2004-03-23 | 2005-10-13 | Boston Scientific Limited | In-vivo visualization system |
| WO2005092188A1 (ja) | 2004-03-29 | 2005-10-06 | Olympus Corporation | 被検体内位置検出システム |
| US20070208252A1 (en) | 2004-04-21 | 2007-09-06 | Acclarent, Inc. | Systems and methods for performing image guided procedures within the ear, nose, throat and paranasal sinuses |
| US7462175B2 (en) | 2004-04-21 | 2008-12-09 | Acclarent, Inc. | Devices, systems and methods for treating disorders of the ear, nose and throat |
| US7720521B2 (en) | 2004-04-21 | 2010-05-18 | Acclarent, Inc. | Methods and devices for performing procedures within the ear, nose, throat and paranasal sinuses |
| US8155403B2 (en) | 2004-05-05 | 2012-04-10 | University Of Iowa Research Foundation | Methods and devices for airway tree labeling and/or matching |
| US7632265B2 (en) | 2004-05-28 | 2009-12-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Radio frequency ablation servo catheter and method |
| US20060209019A1 (en) | 2004-06-01 | 2006-09-21 | Energid Technologies Corporation | Magnetic haptic feedback systems and methods for virtual reality environments |
| US7772541B2 (en) | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20060025668A1 (en) | 2004-08-02 | 2006-02-02 | Peterson Thomas H | Operating table with embedded tracking technology |
| WO2007017847A1 (en) | 2005-08-11 | 2007-02-15 | Navotek Medical Ltd. | Medical treatment system and method using radioactivity based position sensor |
| US7536216B2 (en) | 2004-10-18 | 2009-05-19 | Siemens Medical Solutions Usa, Inc. | Method and system for virtual endoscopy with guidance for biopsy |
| US9049954B2 (en) | 2004-11-03 | 2015-06-09 | Cambridge International, Inc. | Hanger bar assembly for architectural mesh and the like |
| CA2587857C (en) | 2004-11-23 | 2017-10-10 | Pneumrx, Inc. | Steerable device for accessing a target site and methods |
| CA2588002A1 (en) | 2005-01-18 | 2006-07-27 | Traxtal Inc. | Method and apparatus for guiding an instrument to a target in the lung |
| US8335357B2 (en) | 2005-03-04 | 2012-12-18 | Kabushiki Kaisha Toshiba | Image processing apparatus |
| US20060258935A1 (en) | 2005-05-12 | 2006-11-16 | John Pile-Spellman | System for autonomous robotic navigation |
| US10555775B2 (en) | 2005-05-16 | 2020-02-11 | Intuitive Surgical Operations, Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| US7756563B2 (en) | 2005-05-23 | 2010-07-13 | The Penn State Research Foundation | Guidance method based on 3D-2D pose estimation and 3D-CT registration with application to live bronchoscopy |
| US7889905B2 (en) | 2005-05-23 | 2011-02-15 | The Penn State Research Foundation | Fast 3D-2D image registration method with application to continuously guided endoscopy |
| JP4813190B2 (ja) | 2005-05-26 | 2011-11-09 | オリンパスメディカルシステムズ株式会社 | カプセル型医療装置 |
| GB2428110A (en) | 2005-07-06 | 2007-01-17 | Armstrong Healthcare Ltd | A robot and method of registering a robot. |
| US20070123748A1 (en) | 2005-07-14 | 2007-05-31 | Dwight Meglan | Robot for minimally invasive interventions |
| US8583220B2 (en) | 2005-08-02 | 2013-11-12 | Biosense Webster, Inc. | Standardization of catheter-based treatment for atrial fibrillation |
| US8657814B2 (en) | 2005-08-22 | 2014-02-25 | Medtronic Ablation Frontiers Llc | User interface for tissue ablation system |
| EP1924197B1 (en) | 2005-08-24 | 2017-10-11 | Philips Electronics LTD | System for navigated flexible endoscopy |
| US20070073136A1 (en) | 2005-09-15 | 2007-03-29 | Robert Metzger | Bone milling with image guided surgery |
| EP3788944B1 (en) | 2005-11-22 | 2024-02-28 | Intuitive Surgical Operations, Inc. | System for determining the shape of a bendable instrument |
| US8303505B2 (en) | 2005-12-02 | 2012-11-06 | Abbott Cardiovascular Systems Inc. | Methods and apparatuses for image guided medical procedures |
| US8190238B2 (en) | 2005-12-09 | 2012-05-29 | Hansen Medical, Inc. | Robotic catheter system and methods |
| DE102005059271B4 (de) | 2005-12-12 | 2019-02-21 | Siemens Healthcare Gmbh | Kathetervorrichtung |
| US8672922B2 (en) | 2005-12-20 | 2014-03-18 | Intuitive Surgical Operations, Inc. | Wireless communication in a robotic surgical system |
| US9266239B2 (en) | 2005-12-27 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Constraint based control in a minimally invasive surgical apparatus |
| US9962066B2 (en) | 2005-12-30 | 2018-05-08 | Intuitive Surgical Operations, Inc. | Methods and apparatus to shape flexible entry guides for minimally invasive surgery |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US9782229B2 (en) | 2007-02-16 | 2017-10-10 | Globus Medical, Inc. | Surgical robot platform |
| US8191359B2 (en) | 2006-04-13 | 2012-06-05 | The Regents Of The University Of California | Motion estimation using hidden markov model processing in MRI and other applications |
| WO2007129616A1 (ja) | 2006-05-02 | 2007-11-15 | National University Corporation Nagoya University | 内視鏡挿入支援システム及び内視鏡挿入支援方法 |
| DE102006021373A1 (de) | 2006-05-08 | 2007-11-15 | Siemens Ag | Röntgendiagnostikeinrichtung |
| US8348861B2 (en) | 2006-06-05 | 2013-01-08 | Technion Research & Development Foundation Ltd. | Controlled steering of a flexible needle |
| US20080071288A1 (en) | 2006-06-13 | 2008-03-20 | Intuitive Surgical, Inc. | Minimally invasive surgery guide tube |
| US7505810B2 (en) | 2006-06-13 | 2009-03-17 | Rhythmia Medical, Inc. | Non-contact cardiac mapping, including preprocessing |
| US8040127B2 (en) | 2006-08-15 | 2011-10-18 | General Electric Company | Multi-sensor distortion mapping method and system |
| JP5113841B2 (ja) * | 2006-08-21 | 2013-01-09 | エスティーアイ・メディカル・システムズ・エルエルシー | 内視鏡からの映像を用いるコンピュータ支援解析 |
| US8150498B2 (en) | 2006-09-08 | 2012-04-03 | Medtronic, Inc. | System for identification of anatomical landmarks |
| US7824328B2 (en) | 2006-09-18 | 2010-11-02 | Stryker Corporation | Method and apparatus for tracking a surgical instrument during surgery |
| CN100546540C (zh) | 2006-09-19 | 2009-10-07 | 上海宏桐实业有限公司 | 心内膜三维导航系统 |
| US7940977B2 (en) | 2006-10-25 | 2011-05-10 | Rcadia Medical Imaging Ltd. | Method and system for automatic analysis of blood vessel structures to identify calcium or soft plaque pathologies |
| EP2086399B1 (en) | 2006-11-10 | 2017-08-09 | Covidien LP | Adaptive navigation technique for navigating a catheter through a body channel or cavity |
| US7936922B2 (en) | 2006-11-22 | 2011-05-03 | Adobe Systems Incorporated | Method and apparatus for segmenting images |
| EP2087469A2 (en) | 2006-12-01 | 2009-08-12 | Thomson Licensing | Estimating a location of an object in an image |
| US20080183068A1 (en) | 2007-01-25 | 2008-07-31 | Warsaw Orthopedic, Inc. | Integrated Visualization of Surgical Navigational and Neural Monitoring Information |
| US20080183188A1 (en) | 2007-01-25 | 2008-07-31 | Warsaw Orthopedic, Inc. | Integrated Surgical Navigational and Neuromonitoring System |
| US20080183064A1 (en) | 2007-01-30 | 2008-07-31 | General Electric Company | Multi-sensor distortion detection method and system |
| US8672836B2 (en) | 2007-01-31 | 2014-03-18 | The Penn State Research Foundation | Method and apparatus for continuous guidance of endoscopy |
| US9037215B2 (en) | 2007-01-31 | 2015-05-19 | The Penn State Research Foundation | Methods and apparatus for 3D route planning through hollow organs |
| US20080218770A1 (en) | 2007-02-02 | 2008-09-11 | Hansen Medical, Inc. | Robotic surgical instrument and methods using bragg fiber sensors |
| JP4914735B2 (ja) | 2007-02-14 | 2012-04-11 | オリンパスメディカルシステムズ株式会社 | 処置具の位置制御を行う内視鏡システム |
| EP2143038A4 (en) | 2007-02-20 | 2011-01-26 | Philip L Gildenberg | VIDEOSTEREREOTAXY- AND AUDIOSTEREOTAXY-ASSISTED SURGICAL PROCEDURES AND METHODS |
| EP2358269B1 (en) | 2007-03-08 | 2019-04-10 | Sync-RX, Ltd. | Image processing and tool actuation for medical procedures |
| US10433929B2 (en) | 2007-03-09 | 2019-10-08 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for local deformable registration of a catheter navigation system to image data or a model |
| EP2117436A4 (en) | 2007-03-12 | 2011-03-02 | David Tolkowsky | DEVICES AND METHODS FOR PERFORMING MEDICAL OPERATIONS IN ARBORESCENT LUMINUM STRUCTURES |
| WO2008135985A1 (en) | 2007-05-02 | 2008-11-13 | Earlysense Ltd | Monitoring, predicting and treating clinical episodes |
| US8934961B2 (en) | 2007-05-18 | 2015-01-13 | Biomet Manufacturing, Llc | Trackable diagnostic scope apparatus and methods of use |
| US20080300478A1 (en) | 2007-05-30 | 2008-12-04 | General Electric Company | System and method for displaying real-time state of imaged anatomy during a surgical procedure |
| US20090030307A1 (en) | 2007-06-04 | 2009-01-29 | Assaf Govari | Intracorporeal location system with movement compensation |
| US9084623B2 (en) | 2009-08-15 | 2015-07-21 | Intuitive Surgical Operations, Inc. | Controller assisted reconfiguration of an articulated instrument during movement into and out of an entry guide |
| US9089256B2 (en) | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US8620473B2 (en) * | 2007-06-13 | 2013-12-31 | Intuitive Surgical Operations, Inc. | Medical robotic system with coupled control modes |
| US9138129B2 (en) | 2007-06-13 | 2015-09-22 | Intuitive Surgical Operations, Inc. | Method and system for moving a plurality of articulated instruments in tandem back towards an entry guide |
| US20080319491A1 (en) | 2007-06-19 | 2008-12-25 | Ryan Schoenefeld | Patient-matched surgical component and methods of use |
| EP2626006B1 (en) | 2007-08-14 | 2019-10-09 | Koninklijke Philips N.V. | Robotic instrument systems utilizing optical fiber sensors |
| US20130165945A9 (en) | 2007-08-14 | 2013-06-27 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable instrument |
| US20090076476A1 (en) | 2007-08-15 | 2009-03-19 | Hansen Medical, Inc. | Systems and methods employing force sensing for mapping intra-body tissue |
| WO2009097461A1 (en) | 2008-01-29 | 2009-08-06 | Neoguide Systems Inc. | Apparatus and methods for automatically controlling an endoscope |
| ES2511033T3 (es) | 2008-02-12 | 2014-10-22 | Covidien Lp | Sistema de orientación de perspectiva controlada |
| KR100927096B1 (ko) | 2008-02-27 | 2009-11-13 | 아주대학교산학협력단 | 기준 좌표상의 시각적 이미지를 이용한 객체 위치 측정방법 |
| US20090228020A1 (en) | 2008-03-06 | 2009-09-10 | Hansen Medical, Inc. | In-situ graft fenestration |
| US8219179B2 (en) | 2008-03-06 | 2012-07-10 | Vida Diagnostics, Inc. | Systems and methods for navigation within a branched structure of a body |
| US8808164B2 (en) | 2008-03-28 | 2014-08-19 | Intuitive Surgical Operations, Inc. | Controlling a robotic surgical tool with a display monitor |
| US9002076B2 (en) | 2008-04-15 | 2015-04-07 | Medtronic, Inc. | Method and apparatus for optimal trajectory planning |
| US8532734B2 (en) | 2008-04-18 | 2013-09-10 | Regents Of The University Of Minnesota | Method and apparatus for mapping a structure |
| US8218846B2 (en) | 2008-05-15 | 2012-07-10 | Superdimension, Ltd. | Automatic pathway and waypoint generation and navigation method |
| JP5372407B2 (ja) | 2008-05-23 | 2013-12-18 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US20100030061A1 (en) | 2008-07-31 | 2010-02-04 | Canfield Monte R | Navigation system for cardiac therapies using gating |
| US8290571B2 (en) | 2008-08-01 | 2012-10-16 | Koninklijke Philips Electronics N.V. | Auxiliary cavity localization |
| EP2153794B1 (en) | 2008-08-15 | 2016-11-09 | Stryker European Holdings I, LLC | System for and method of visualizing an interior of a body |
| WO2010044852A2 (en) | 2008-10-14 | 2010-04-22 | University Of Florida Research Foundation, Inc. | Imaging platform to provide integrated navigation capabilities for surgical guidance |
| WO2010048160A2 (en) * | 2008-10-20 | 2010-04-29 | The Johns Hopkins University | Environment property estimation and graphical display |
| SG194381A1 (en) | 2008-10-31 | 2013-11-29 | Chevron Phillips Chemical Co | Oligomerization catalyst system and process for oligomerizing olefins |
| US20100121139A1 (en) | 2008-11-12 | 2010-05-13 | Ouyang Xiaolong | Minimally Invasive Imaging Systems |
| US8317746B2 (en) | 2008-11-20 | 2012-11-27 | Hansen Medical, Inc. | Automated alignment |
| WO2010068783A1 (en) | 2008-12-12 | 2010-06-17 | Corindus Inc. | Remote catheter procedure system |
| US8335590B2 (en) | 2008-12-23 | 2012-12-18 | Intuitive Surgical Operations, Inc. | System and method for adjusting an image capturing device attribute using an unused degree-of-freedom of a master control device |
| JP4585048B2 (ja) | 2009-01-15 | 2010-11-24 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| KR100961661B1 (ko) | 2009-02-12 | 2010-06-09 | 주식회사 래보 | 수술용 항법 장치 및 그 방법 |
| US8120301B2 (en) | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US8337397B2 (en) | 2009-03-26 | 2012-12-25 | Intuitive Surgical Operations, Inc. | Method and system for providing visual guidance to an operator for steering a tip of an endoscopic device toward one or more landmarks in a patient |
| US9002427B2 (en) | 2009-03-30 | 2015-04-07 | Lifewave Biomedical, Inc. | Apparatus and method for continuous noninvasive measurement of respiratory function and events |
| JP2012525190A (ja) | 2009-04-29 | 2012-10-22 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | 単眼の内視鏡画像からのリアルタイム深度推定 |
| CN102439631A (zh) | 2009-05-08 | 2012-05-02 | 皇家飞利浦电子股份有限公司 | 不具有电磁跟踪和术前扫描路线图的实时镜跟踪和分支标记 |
| US8675736B2 (en) | 2009-05-14 | 2014-03-18 | Qualcomm Incorporated | Motion vector processing |
| CN102292991B (zh) | 2009-05-15 | 2014-10-08 | 夏普株式会社 | 图像处理装置和图像处理方法 |
| US20100292565A1 (en) | 2009-05-18 | 2010-11-18 | Andreas Meyer | Medical imaging medical device navigation from at least two 2d projections from different angles |
| EP2433262B1 (en) | 2009-05-18 | 2016-07-27 | Koninklijke Philips N.V. | Marker-free tracking registration and calibration for em-tracked endoscopic system |
| ES2388029B1 (es) | 2009-05-22 | 2013-08-13 | Universitat Politècnica De Catalunya | Sistema robótico para cirugia laparoscópica. |
| GB0915200D0 (en) | 2009-09-01 | 2009-10-07 | Ucl Business Plc | Method for re-localising sites in images |
| US20110092808A1 (en) | 2009-10-20 | 2011-04-21 | Magnetecs, Inc. | Method for acquiring high density mapping data with a catheter guidance system |
| CN102595998A (zh) | 2009-11-04 | 2012-07-18 | 皇家飞利浦电子股份有限公司 | 利用距离传感器的碰撞避免和检测 |
| JP4781492B2 (ja) | 2009-11-10 | 2011-09-28 | オリンパスメディカルシステムズ株式会社 | 多関節マニピュレータ装置及びそれを有する内視鏡システム |
| US20110184238A1 (en) | 2010-01-28 | 2011-07-28 | The Penn State Research Foundation | Image-based global registration system and method applicable to bronchoscopy guidance |
| EP2377457B1 (en) | 2010-02-22 | 2016-07-27 | Olympus Corporation | Medical apparatus |
| DE102010012621A1 (de) | 2010-03-24 | 2011-09-29 | Siemens Aktiengesellschaft | Verfahren und Vorrichtung zur automatischen Adaption eines Referenzbildes |
| US8425455B2 (en) | 2010-03-30 | 2013-04-23 | Angiodynamics, Inc. | Bronchial catheter and method of use |
| IT1401669B1 (it) | 2010-04-07 | 2013-08-02 | Sofar Spa | Sistema di chirurgia robotizzata con controllo perfezionato. |
| US8581905B2 (en) | 2010-04-08 | 2013-11-12 | Disney Enterprises, Inc. | Interactive three dimensional displays on handheld devices |
| WO2011126370A1 (en) | 2010-04-09 | 2011-10-13 | Universiteit Utrecht Holding B.V. | Recombinant multimeric influenza proteins |
| EP2557998B1 (en) | 2010-04-15 | 2020-12-23 | Koninklijke Philips N.V. | Instrument-based image registration for fusing images with tubular structures |
| CA2797302C (en) | 2010-04-28 | 2019-01-15 | Ryerson University | System and methods for intraoperative guidance feedback |
| US8845631B2 (en) | 2010-04-28 | 2014-09-30 | Medtronic Ablation Frontiers Llc | Systems and methods of performing medical procedures |
| US20120101369A1 (en) | 2010-06-13 | 2012-04-26 | Angiometrix Corporation | Methods and systems for determining vascular bodily lumen information and guiding medical devices |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US8460236B2 (en) | 2010-06-24 | 2013-06-11 | Hansen Medical, Inc. | Fiber optic instrument sensing system |
| US20120071753A1 (en) | 2010-08-20 | 2012-03-22 | Mark Hunter | Apparatus and method for four dimensional soft tissue navigation including endoscopic mapping |
| US9314306B2 (en) | 2010-09-17 | 2016-04-19 | Hansen Medical, Inc. | Systems and methods for manipulating an elongate member |
| JP5669529B2 (ja) | 2010-11-17 | 2015-02-12 | オリンパス株式会社 | 撮像装置、プログラム及びフォーカス制御方法 |
| US9066086B2 (en) | 2010-12-08 | 2015-06-23 | Industrial Technology Research Institute | Methods for generating stereoscopic views from monoscopic endoscope images and systems using the same |
| US8812079B2 (en) | 2010-12-22 | 2014-08-19 | Biosense Webster (Israel), Ltd. | Compensation for magnetic disturbance due to fluoroscope |
| US9414770B2 (en) | 2010-12-29 | 2016-08-16 | Biosense Webster (Israel) Ltd. | Respiratory effect reduction in catheter position sensing |
| WO2012100211A2 (en) | 2011-01-20 | 2012-07-26 | Hansen Medical, Inc. | System and method for endoluminal and transluminal therapy |
| US10391277B2 (en) | 2011-02-18 | 2019-08-27 | Voxel Rad, Ltd. | Systems and methods for 3D stereoscopic angiovision, angionavigation and angiotherapeutics |
| WO2012109760A1 (en) | 2011-02-18 | 2012-08-23 | Traumis Surgical Systems Inc. | Tool with integrated navigation and guidance system and related apparatus and methods |
| US10786432B2 (en) | 2011-04-12 | 2020-09-29 | Sartorius Stedim Biotech Gmbh | Use of a device and a method for preparing mixtures of pharmaceutical substances |
| US10918307B2 (en) | 2011-09-13 | 2021-02-16 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Catheter navigation using impedance and magnetic field measurements |
| US10362963B2 (en) | 2011-04-14 | 2019-07-30 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Correction of shift and drift in impedance-based medical device navigation using magnetic field information |
| US8900131B2 (en) | 2011-05-13 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
| US9572481B2 (en) | 2011-05-13 | 2017-02-21 | Intuitive Surgical Operations, Inc. | Medical system with multiple operating modes for steering a medical instrument through linked body passages |
| EP2723240B1 (en) | 2011-06-27 | 2018-08-08 | Koninklijke Philips N.V. | Live 3d angiogram using registration of a surgical tool curve to an x-ray image |
| US9173683B2 (en) | 2011-08-31 | 2015-11-03 | DePuy Synthes Products, Inc. | Revisable orthopedic anchor and methods of use |
| CN102973317A (zh) | 2011-09-05 | 2013-03-20 | 周宁新 | 微创手术机器人机械臂布置结构 |
| EP2753241B1 (en) | 2011-09-08 | 2016-11-09 | APN Health, LLC | Automatically determining 3d catheter location and orientation using 2d fluoroscopy only |
| EP2755591B1 (en) | 2011-09-16 | 2020-11-18 | Auris Health, Inc. | System for displaying an image of a patient anatomy on a movable display |
| US9504604B2 (en) | 2011-12-16 | 2016-11-29 | Auris Surgical Robotics, Inc. | Lithotripsy eye treatment |
| US8700561B2 (en) | 2011-12-27 | 2014-04-15 | Mcafee, Inc. | System and method for providing data protection workflows in a network environment |
| WO2013116140A1 (en) | 2012-02-03 | 2013-08-08 | Intuitive Surgical Operations, Inc. | Steerable flexible needle with embedded shape sensing |
| WO2013118090A2 (en) | 2012-02-09 | 2013-08-15 | Koninklijke Philips N.V. | Shaft tracker for real-time navigation tracking |
| WO2013126659A1 (en) | 2012-02-22 | 2013-08-29 | Veran Medical Technologies, Inc. | Systems, methods, and devices for four dimensional soft tissue navigation |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| US20140142591A1 (en) | 2012-04-24 | 2014-05-22 | Auris Surgical Robotics, Inc. | Method, apparatus and a system for robotic assisted surgery |
| US10039473B2 (en) | 2012-05-14 | 2018-08-07 | Intuitive Surgical Operations, Inc. | Systems and methods for navigation based on ordered sensor records |
| US10194801B2 (en) | 2012-06-28 | 2019-02-05 | Koninklijke Philips N.V. | Fiber optic sensor guided navigation for vascular visualization and monitoring |
| DE102012220116A1 (de) | 2012-06-29 | 2014-01-02 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Mobil handhabbare Vorrichtung, insbesondere zur Bearbeitung oder Beobachtung eines Körpers, und Verfahren zur Handhabung, insbesondere Kalibrierung, einer Vorrichtung |
| KR102189666B1 (ko) | 2012-08-15 | 2020-12-11 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 기계 몸체의 운동을 조종하기 위한 가상 자유도 |
| US9183354B2 (en) | 2012-08-15 | 2015-11-10 | Musc Foundation For Research Development | Systems and methods for image guided surgery |
| CN104736097B (zh) | 2012-08-24 | 2017-12-22 | 休斯顿大学 | 用于成像导向和机器人辅助外科手术的机器人装置和系统 |
| US9330454B2 (en) | 2012-09-12 | 2016-05-03 | Bruce Reiner | Method and apparatus for image-centric standardized tool for quality assurance analysis in medical imaging |
| US20140107390A1 (en) | 2012-10-12 | 2014-04-17 | Elekta Ab (Publ) | Implementation and experimental results of real-time 4d tumor tracking using multi-leaf collimator (mlc), and/or mlc-carriage (mlc-bank), and/or treatment table (couch) |
| US20140180063A1 (en) | 2012-10-12 | 2014-06-26 | Intuitive Surgical Operations, Inc. | Determining position of medical device in branched anatomical structure |
| US9141480B2 (en) | 2012-10-17 | 2015-09-22 | Datadirect Networks, Inc. | Handling failed transaction peers in a distributed hash table |
| US9121455B2 (en) | 2012-11-07 | 2015-09-01 | Dana Automotive Systems Group, Llc | Clutch management system |
| WO2014081725A2 (en) | 2012-11-20 | 2014-05-30 | University Of Washington Through Its Center For Commercialization | Electromagnetic sensor integration with ultrathin scanning fiber endoscope |
| LU92104B1 (en) | 2012-11-28 | 2014-05-30 | Iee Sarl | Method and system for determining a ventilatory threshold |
| JP6045417B2 (ja) | 2012-12-20 | 2016-12-14 | オリンパス株式会社 | 画像処理装置、電子機器、内視鏡装置、プログラム及び画像処理装置の作動方法 |
| US10231867B2 (en) | 2013-01-18 | 2019-03-19 | Auris Health, Inc. | Method, apparatus and system for a water jet |
| US11172809B2 (en) | 2013-02-15 | 2021-11-16 | Intuitive Surgical Operations, Inc. | Vision probe with access port |
| KR20150124446A (ko) | 2013-02-26 | 2015-11-05 | 아메트 시난 카박시 | 로봇 매니퓰레이터 시스템 |
| US9459087B2 (en) | 2013-03-05 | 2016-10-04 | Ezono Ag | Magnetic position detection system |
| EP2904957A4 (en) * | 2013-03-06 | 2016-08-24 | Olympus Corp | ENDOSCOPE SYSTEM |
| US9867635B2 (en) | 2013-03-08 | 2018-01-16 | Auris Surgical Robotics, Inc. | Method, apparatus and system for a water jet |
| US10080576B2 (en) | 2013-03-08 | 2018-09-25 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US20140296655A1 (en) | 2013-03-11 | 2014-10-02 | ROPAMedics LLC | Real-time tracking of cerebral hemodynamic response (rtchr) of a subject based on hemodynamic parameters |
| JP5718537B2 (ja) | 2013-03-12 | 2015-05-13 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US20170303941A1 (en) | 2013-03-14 | 2017-10-26 | The General Hospital Corporation | System and method for guided removal from an in vivo subject |
| US20170238807A9 (en) | 2013-03-15 | 2017-08-24 | LX Medical, Inc. | Tissue imaging and image guidance in luminal anatomic structures and body cavities |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US9301723B2 (en) | 2013-03-15 | 2016-04-05 | Covidien Lp | Microwave energy-delivery device and system |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| EP2918218A4 (en) | 2013-03-27 | 2016-08-03 | Olympus Corp | ENDOSCOPE SYSTEM |
| US10271810B2 (en) | 2013-04-02 | 2019-04-30 | St. Jude Medical International Holding S.à r. l. | Enhanced compensation of motion in a moving organ using processed reference sensor data |
| EP2983579A2 (en) | 2013-04-12 | 2016-02-17 | NinePoint Medical, Inc. | Multiple aperture, multiple modal optical systems and methods |
| US9592095B2 (en) | 2013-05-16 | 2017-03-14 | Intuitive Surgical Operations, Inc. | Systems and methods for robotic medical system integration with external imaging |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| US20140364739A1 (en) | 2013-06-06 | 2014-12-11 | General Electric Company | Systems and methods for analyzing a vascular structure |
| US10744035B2 (en) | 2013-06-11 | 2020-08-18 | Auris Health, Inc. | Methods for robotic assisted cataract surgery |
| JP6037964B2 (ja) | 2013-07-26 | 2016-12-07 | オリンパス株式会社 | マニピュレータシステム |
| US10426661B2 (en) | 2013-08-13 | 2019-10-01 | Auris Health, Inc. | Method and apparatus for laser assisted cataract surgery |
| CN105451802B (zh) | 2013-08-15 | 2019-04-19 | 直观外科手术操作公司 | 用于导管定位和插入的图形用户界面 |
| US10098565B2 (en) | 2013-09-06 | 2018-10-16 | Covidien Lp | System and method for lung visualization using ultrasound |
| CN105592790A (zh) | 2013-10-02 | 2016-05-18 | 皇家飞利浦有限公司 | 用于光学形状感测配准的集线器设计和方法 |
| EP3689284A1 (en) | 2013-10-24 | 2020-08-05 | Auris Health, Inc. | System for robotic-assisted endolumenal surgery and related methods |
| US9713509B2 (en) | 2013-10-24 | 2017-07-25 | Auris Surgical Robotics, Inc. | Instrument device manipulator with back-mounted tool attachment mechanism |
| US9314191B2 (en) | 2013-11-19 | 2016-04-19 | Pacesetter, Inc. | Method and system to measure cardiac motion using a cardiovascular navigation system |
| KR102337440B1 (ko) | 2013-12-09 | 2021-12-10 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 장치-인지 가요성 도구 정합을 위한 시스템 및 방법 |
| CN103705307B (zh) | 2013-12-10 | 2017-02-22 | 中国科学院深圳先进技术研究院 | 手术导航系统及医疗机器人 |
| CN103735313B (zh) | 2013-12-11 | 2016-08-17 | 中国科学院深圳先进技术研究院 | 一种手术机器人及其状态监测方法 |
| EP3085324B1 (en) | 2013-12-20 | 2019-02-20 | Olympus Corporation | Guide member for flexible manipulator, and flexible manipulator |
| EP4184483A1 (en) | 2013-12-20 | 2023-05-24 | Intuitive Surgical Operations, Inc. | Simulator system for medical procedure training |
| EP3096692B1 (en) | 2014-01-24 | 2023-06-14 | Koninklijke Philips N.V. | Virtual image with optical shape sensing device perspective |
| KR20210156301A (ko) | 2014-02-04 | 2021-12-24 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 중재 도구의 가상 항행을 위한 조직의 비강체 변형을 위한 시스템 및 방법 |
| SG11201606423VA (en) | 2014-02-05 | 2016-09-29 | Univ Singapore | Systems and methods for tracking and displaying endoscope shape and distal end orientation |
| US20150223902A1 (en) | 2014-02-07 | 2015-08-13 | Hansen Medical, Inc. | Navigation with 3d localization using 2d images |
| EP3104803B1 (en) | 2014-02-11 | 2021-09-15 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| JP6270537B2 (ja) | 2014-02-27 | 2018-01-31 | オリンパス株式会社 | 医療用システム |
| KR20150103938A (ko) | 2014-03-04 | 2015-09-14 | 현대자동차주식회사 | 리튬황 배터리 분리막 |
| US10952751B2 (en) | 2014-03-17 | 2021-03-23 | Marksman Targeting, Inc. | Surgical targeting systems and methods |
| CN104931059B (zh) | 2014-03-21 | 2018-09-11 | 比亚迪股份有限公司 | 车载救援导航系统和方法 |
| US10912523B2 (en) | 2014-03-24 | 2021-02-09 | Intuitive Surgical Operations, Inc. | Systems and methods for anatomic motion compensation |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| US20150305650A1 (en) | 2014-04-23 | 2015-10-29 | Mark Hunter | Apparatuses and methods for endobronchial navigation to and confirmation of the location of a target tissue and percutaneous interception of the target tissue |
| CN104055520B (zh) | 2014-06-11 | 2016-02-24 | 清华大学 | 人体器官运动监测方法和手术导航系统 |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US20170007337A1 (en) | 2014-07-01 | 2017-01-12 | Auris Surgical Robotics, Inc. | Driver-mounted torque sensing mechanism |
| US20160270865A1 (en) | 2014-07-01 | 2016-09-22 | Auris Surgical Robotics, Inc. | Reusable catheter with disposable balloon attachment and tapered tip |
| US10159533B2 (en) | 2014-07-01 | 2018-12-25 | Auris Health, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US9788910B2 (en) | 2014-07-01 | 2017-10-17 | Auris Surgical Robotics, Inc. | Instrument-mounted tension sensing mechanism for robotically-driven medical instruments |
| US9770216B2 (en) | 2014-07-02 | 2017-09-26 | Covidien Lp | System and method for navigating within the lung |
| US9603668B2 (en) | 2014-07-02 | 2017-03-28 | Covidien Lp | Dynamic 3D lung map view for tool navigation inside the lung |
| US20160000414A1 (en) | 2014-07-02 | 2016-01-07 | Covidien Lp | Methods for marking biopsy location |
| EP3164051B1 (en) | 2014-07-02 | 2023-08-30 | Covidien LP | System and program for providing distance and orientation feedback while navigating in 3d |
| CN106793939A (zh) | 2014-09-17 | 2017-05-31 | 塔里斯生物医药公司 | 用于膀胱的诊断性映射的方法和系统 |
| CN107427327A (zh) | 2014-09-30 | 2017-12-01 | 奥瑞斯外科手术机器人公司 | 具有虚拟轨迹和柔性内窥镜的可配置机器人外科手术系统 |
| EP3206577A1 (en) | 2014-10-15 | 2017-08-23 | Vincent Suzara | Magnetic field structures, field generators, navigation and imaging for untethered robotic device enabled medical procedure |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| DE102014222293A1 (de) | 2014-10-31 | 2016-05-19 | Siemens Aktiengesellschaft | Verfahren zur automatischen Überwachung des Eindringverhaltens eines von einem Roboterarm gehaltenen Trokars und Überwachungssystem |
| CA3003405A1 (en) | 2014-11-11 | 2016-05-19 | Vanderbilt University | Methods for limiting acute kidney injury |
| US20170325896A1 (en) | 2014-11-13 | 2017-11-16 | Intuitive Surgical Operations, Inc. | Systems and methods for filtering localization data |
| US9931168B2 (en) | 2015-01-12 | 2018-04-03 | Biomet Manufacuturing. LLC | Plan implementation |
| EP3258839B1 (en) | 2015-02-20 | 2019-09-04 | Teleflex Medical Devices S.à.r.l. | Medical device position location systems, devices and methods |
| JP6348078B2 (ja) | 2015-03-06 | 2018-06-27 | 富士フイルム株式会社 | 分岐構造判定装置、分岐構造判定装置の作動方法および分岐構造判定プログラム |
| JP6371729B2 (ja) | 2015-03-25 | 2018-08-08 | 富士フイルム株式会社 | 内視鏡検査支援装置、内視鏡検査支援装置の作動方法および内視鏡支援プログラム |
| US20160287279A1 (en) | 2015-04-01 | 2016-10-06 | Auris Surgical Robotics, Inc. | Microsurgical tool for robotic applications |
| WO2016164824A1 (en) | 2015-04-09 | 2016-10-13 | Auris Surgical Robotics, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| CN104758066B (zh) | 2015-05-06 | 2017-05-10 | 中国科学院深圳先进技术研究院 | 用于手术导航的设备及手术机器人 |
| US9622827B2 (en) | 2015-05-15 | 2017-04-18 | Auris Surgical Robotics, Inc. | Surgical robotics system |
| WO2016199273A1 (ja) | 2015-06-11 | 2016-12-15 | オリンパス株式会社 | 内視鏡装置及び内視鏡装置の作動方法 |
| JP6750194B2 (ja) | 2015-06-19 | 2020-09-02 | ソニー株式会社 | 医療用画像処理装置、医療用画像処理方法、及び、医療用観察システム |
| US10347904B2 (en) | 2015-06-19 | 2019-07-09 | Solidenergy Systems, Llc | Multi-layer polymer coated Li anode for high density Li metal battery |
| GB2540757B (en) | 2015-07-22 | 2021-03-31 | Cmr Surgical Ltd | Torque sensors |
| WO2017030916A1 (en) | 2015-08-14 | 2017-02-23 | Schlumberger Technology Corporation | Inline viscosity determination technique |
| CN108024698B (zh) | 2015-08-14 | 2020-09-15 | 直观外科手术操作公司 | 用于图像引导外科手术的配准系统和方法 |
| JP6987040B2 (ja) | 2015-08-28 | 2021-12-22 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 運動関係を決定する方法及び装置 |
| US10736518B2 (en) | 2015-08-31 | 2020-08-11 | Masimo Corporation | Systems and methods to monitor repositioning of a patient |
| CN108348133B (zh) | 2015-09-09 | 2020-11-13 | 奥瑞斯健康公司 | 用于手术机器人系统的器械装置操纵器 |
| US10510144B2 (en) * | 2015-09-10 | 2019-12-17 | Magentiq Eye Ltd. | System and method for detection of suspicious tissue regions in an endoscopic procedure |
| JP6594133B2 (ja) | 2015-09-16 | 2019-10-23 | 富士フイルム株式会社 | 内視鏡位置特定装置、内視鏡位置特定装置の作動方法および内視鏡位置特定プログラム |
| EP3735888B1 (en) | 2015-09-17 | 2022-11-23 | EndoMaster Pte Ltd | Improved flexible robotic endoscopy system |
| AU2016323982A1 (en) | 2015-09-18 | 2018-04-12 | Auris Health, Inc. | Navigation of tubular networks |
| CN108135488B (zh) | 2015-10-13 | 2021-11-26 | 光学实验室成像公司 | 确定侧支的剖面视角的血管内成像系统和方法 |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10231793B2 (en) | 2015-10-30 | 2019-03-19 | Auris Health, Inc. | Object removal through a percutaneous suction tube |
| US10143526B2 (en) * | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US11172895B2 (en) | 2015-12-07 | 2021-11-16 | Covidien Lp | Visualization, navigation, and planning with electromagnetic navigation bronchoscopy and cone beam computed tomography integrated |
| CN105559850B (zh) | 2015-12-17 | 2017-08-25 | 天津工业大学 | 一种用于机器人辅助外科具有力传感功能的手术钻器械 |
| US10143528B2 (en) | 2015-12-17 | 2018-12-04 | Glove First, Llc | Glove donning system |
| US10932861B2 (en) | 2016-01-14 | 2021-03-02 | Auris Health, Inc. | Electromagnetic tracking surgical system and method of controlling the same |
| US10932691B2 (en) | 2016-01-26 | 2021-03-02 | Auris Health, Inc. | Surgical tools having electromagnetic tracking components |
| US10470719B2 (en) | 2016-02-01 | 2019-11-12 | Verily Life Sciences Llc | Machine learnt model to detect REM sleep periods using a spectral analysis of heart rate and motion |
| US10717194B2 (en) | 2016-02-26 | 2020-07-21 | Intuitive Surgical Operations, Inc. | System and method for collision avoidance using virtual boundaries |
| WO2017162820A1 (en) | 2016-03-24 | 2017-09-28 | Koninklijke Philips N.V. | Treatment assessment device |
| JP7232051B2 (ja) | 2016-03-31 | 2023-03-02 | コーニンクレッカ フィリップス エヌ ヴェ | カテーテル配置のための画像誘導ロボット |
| US11324554B2 (en) | 2016-04-08 | 2022-05-10 | Auris Health, Inc. | Floating electromagnetic field generator system and method of controlling the same |
| US10470839B2 (en) | 2016-06-02 | 2019-11-12 | Covidien Lp | Assessment of suture or staple line integrity and localization of potential tissue defects along the suture or staple line |
| US10806516B2 (en) | 2016-06-20 | 2020-10-20 | General Electric Company | Virtual 4D stent implantation path assessment |
| KR102607065B1 (ko) | 2016-06-30 | 2023-11-29 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 영상 안내식 시술 중에 복수의 모드에서 안내 정보를 디스플레이하기 위한 그래픽 사용자 인터페이스 |
| US11037464B2 (en) | 2016-07-21 | 2021-06-15 | Auris Health, Inc. | System with emulator movement tracking for controlling medical devices |
| CN109561934B (zh) * | 2016-08-23 | 2022-03-08 | 直观外科手术操作公司 | 用于医疗程序期间监测患者运动的系统和方法 |
| US10238455B2 (en) | 2016-08-31 | 2019-03-26 | Covidien Lp | Pathway planning for use with a navigation planning and procedure system |
| EP3506836A4 (en) | 2016-08-31 | 2020-04-29 | Auris Health, Inc. | EXTENSION FOR SURGICAL INSTRUMENT |
| US20180055576A1 (en) | 2016-09-01 | 2018-03-01 | Covidien Lp | Respiration motion stabilization for lung magnetic navigation system |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10278778B2 (en) | 2016-10-27 | 2019-05-07 | Inneroptic Technology, Inc. | Medical device navigation using a virtual 3D space |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| US10543048B2 (en) | 2016-12-28 | 2020-01-28 | Auris Health, Inc. | Flexible instrument insertion using an adaptive insertion force threshold |
| US10136959B2 (en) | 2016-12-28 | 2018-11-27 | Auris Health, Inc. | Endolumenal object sizing |
| CN110087576B (zh) * | 2017-01-09 | 2023-03-17 | 直观外科手术操作公司 | 用于在图像引导的程序中将细长装置配准到三维图像的系统和方法 |
| US11842030B2 (en) | 2017-01-31 | 2023-12-12 | Medtronic Navigation, Inc. | Method and apparatus for image-based navigation |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| AU2018244318B2 (en) | 2017-03-28 | 2023-11-16 | Auris Health, Inc. | Shaft actuating handle |
| US10475235B2 (en) | 2017-03-29 | 2019-11-12 | Fujifilm Corporation | Three-dimensional image processing apparatus, three-dimensional image processing method, and three-dimensional image processing program |
| US11490782B2 (en) | 2017-03-31 | 2022-11-08 | Auris Health, Inc. | Robotic systems for navigation of luminal networks that compensate for physiological noise |
| WO2018187069A1 (en) | 2017-04-07 | 2018-10-11 | Auris Surgical Robotics, Inc. | Patient introducer alignment |
| US10285574B2 (en) | 2017-04-07 | 2019-05-14 | Auris Health, Inc. | Superelastic medical instrument |
| WO2018188466A1 (en) * | 2017-04-12 | 2018-10-18 | Bio-Medical Engineering (HK) Limited | Automated steering systems and methods for a robotic endoscope |
| US10643330B2 (en) | 2017-04-21 | 2020-05-05 | Biosense Webster (Israel) Ltd. | Registration of an anatomical image with a position-tracking coordinate system based on proximity to bone tissue |
| US20180308247A1 (en) | 2017-04-25 | 2018-10-25 | Best Medical International, Inc. | Tissue imaging system and method for tissue imaging |
| JP2020520691A (ja) | 2017-05-12 | 2020-07-16 | オーリス ヘルス インコーポレイテッド | 生検装置およびシステム |
| KR102576296B1 (ko) | 2017-05-17 | 2023-09-08 | 아우리스 헬스, 인코포레이티드 | 교환 가능한 작업 채널 |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| EP3645100A4 (en) | 2017-06-28 | 2021-03-17 | Auris Health, Inc. | INSTRUMENT INSERTION COMPENSATION |
| CN116725667A (zh) | 2017-06-28 | 2023-09-12 | 奥瑞斯健康公司 | 提供定位信息的系统和在解剖结构内定位器械的方法 |
| WO2019005696A1 (en) | 2017-06-28 | 2019-01-03 | Auris Health, Inc. | DETECTION OF ELECTROMAGNETIC DISTORTION |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| EP3445048A1 (en) | 2017-08-15 | 2019-02-20 | Holo Surgical Inc. | A graphical user interface for a surgical navigation system for providing an augmented reality image during operation |
| US10593052B2 (en) | 2017-08-23 | 2020-03-17 | Synaptive Medical (Barbados) Inc. | Methods and systems for updating an existing landmark registration |
| US10464209B2 (en) | 2017-10-05 | 2019-11-05 | Auris Health, Inc. | Robotic system with indication of boundary for robotic arm |
| US10016900B1 (en) | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US10555778B2 (en) * | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) * | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| WO2019113249A1 (en) | 2017-12-06 | 2019-06-13 | Auris Health, Inc. | Systems and methods to correct for uncommanded instrument roll |
| EP3684438A4 (en) | 2017-12-08 | 2021-09-22 | Auris Health, Inc. | DIRECTED FLUIDS |
| WO2019113391A1 (en) | 2017-12-08 | 2019-06-13 | Auris Health, Inc. | System and method for medical instrument navigation and targeting |
| US10470830B2 (en) | 2017-12-11 | 2019-11-12 | Auris Health, Inc. | Systems and methods for instrument based insertion architectures |
| CN110869173B (zh) | 2017-12-14 | 2023-11-17 | 奥瑞斯健康公司 | 用于估计器械定位的系统与方法 |
| JP7059377B2 (ja) | 2017-12-18 | 2022-04-25 | オーリス ヘルス インコーポレイテッド | 管腔ネットワーク内の器具の追跡およびナビゲーションの方法およびシステム |
| EP3740152A4 (en) | 2018-01-17 | 2021-11-03 | Auris Health, Inc. | SURGICAL PLATFORM WITH ADJUSTABLE ARMRESTS |
| US10765303B2 (en) | 2018-02-13 | 2020-09-08 | Auris Health, Inc. | System and method for driving medical instrument |
| EP3758641A4 (en) | 2018-03-01 | 2021-12-15 | Auris Health, Inc. | PROCEDURES AND SYSTEMS FOR MAPPING AND NAVIGATION |
| JP2019154816A (ja) | 2018-03-13 | 2019-09-19 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用画像処理装置、医療用観察装置、及び医療用観察装置の作動方法 |
| MX2020010112A (es) | 2018-03-28 | 2020-11-06 | Auris Health Inc | Sistemas y metodos para el registro de sensores de ubicacion. |
| JP7225259B2 (ja) | 2018-03-28 | 2023-02-20 | オーリス ヘルス インコーポレイテッド | 器具の推定位置を示すためのシステム及び方法 |
| JP7305668B2 (ja) | 2018-03-28 | 2023-07-10 | オーリス ヘルス インコーポレイテッド | 可変曲げ剛性プロファイルを有する医療用器具 |
| US20190298465A1 (en) | 2018-03-29 | 2019-10-03 | Auris Health, Inc. | Robotically-enabled medical systems with multifunction end effectors having rotational offsets |
| WO2019231895A1 (en) | 2018-05-30 | 2019-12-05 | Auris Health, Inc. | Systems and methods for location sensor-based branch prediction |
| US10898275B2 (en) | 2018-05-31 | 2021-01-26 | Auris Health, Inc. | Image-based airway analysis and mapping |
| EP3801189A4 (en) | 2018-05-31 | 2022-02-23 | Auris Health, Inc. | PATH-BASED NAVIGATION OF TUBULAR NETWORKS |
| EP3801280A4 (en) | 2018-05-31 | 2022-03-09 | Auris Health, Inc. | ROBOTIC SYSTEMS AND LUMINAL NETWORK NAVIGATION METHODS THAT DETECT PHYSIOLOGICAL NOISE |
| US10744981B2 (en) | 2018-06-06 | 2020-08-18 | Sensata Technologies, Inc. | Electromechanical braking connector |
| KR102579505B1 (ko) | 2018-06-07 | 2023-09-20 | 아우리스 헬스, 인코포레이티드 | 고출력 기구를 가진 로봇 의료 시스템 |
| WO2020005370A1 (en) | 2018-06-27 | 2020-01-02 | Auris Health, Inc. | Systems and techniques for providing multiple perspectives during medical procedures |
| CN112384121A (zh) | 2018-06-27 | 2021-02-19 | 奥瑞斯健康公司 | 用于医疗器械的对准系统和附接系统 |
| JP7391886B2 (ja) | 2018-06-28 | 2023-12-05 | オーリス ヘルス インコーポレイテッド | 滑車共有を組み込んだ医療システム |
| CN112804946A (zh) | 2018-08-07 | 2021-05-14 | 奥瑞斯健康公司 | 将基于应变的形状感测与导管控制相结合 |
| EP3806772A4 (en) | 2018-08-15 | 2022-03-30 | Auris Health, Inc. | MEDICAL INSTRUMENTS FOR TISSUE CAUTERIZATION |
| US10639114B2 (en) | 2018-08-17 | 2020-05-05 | Auris Health, Inc. | Bipolar medical instrument |
| AU2019326548B2 (en) | 2018-08-24 | 2023-11-23 | Auris Health, Inc. | Manually and robotically controllable medical instruments |
| US11203254B2 (en) | 2018-08-28 | 2021-12-21 | Magna Closures Inc. | Frameless window regulator rail with over-molded functional edge |
| WO2020060750A1 (en) | 2018-09-17 | 2020-03-26 | Auris Health, Inc. | Systems and methods for concomitant medical procedures |
| WO2020068303A1 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Systems and instruments for suction and irrigation |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| KR20210073542A (ko) | 2018-09-28 | 2021-06-18 | 아우리스 헬스, 인코포레이티드 | 의료 기구를 도킹시키기 위한 시스템 및 방법 |
| US10820947B2 (en) | 2018-09-28 | 2020-11-03 | Auris Health, Inc. | Devices, systems, and methods for manually and robotically driving medical instruments |
| CN112804959A (zh) | 2018-09-28 | 2021-05-14 | 奥瑞斯健康公司 | 用于伴随内窥镜和经皮医学规程的机器人系统和方法 |
| WO2020076447A1 (en) | 2018-10-08 | 2020-04-16 | Auris Health, Inc. | Systems and instruments for tissue sealing |
| US11950863B2 (en) | 2018-12-20 | 2024-04-09 | Auris Health, Inc | Shielding for wristed instruments |
| JP7480152B2 (ja) | 2018-12-28 | 2024-05-09 | オーリス ヘルス インコーポレイテッド | ロボット医療用システム及び方法のための経皮的シース |
| WO2020172394A1 (en) | 2019-02-22 | 2020-08-27 | Auris Health, Inc. | Surgical platform with motorized arms for adjustable arm supports |
| KR20210137508A (ko) | 2019-03-08 | 2021-11-17 | 아우리스 헬스, 인코포레이티드 | 의료 시스템 및 응용을 위한 틸트 메커니즘 |
| US11638618B2 (en) | 2019-03-22 | 2023-05-02 | Auris Health, Inc. | Systems and methods for aligning inputs on medical instruments |
| WO2020197625A1 (en) | 2019-03-25 | 2020-10-01 | Auris Health, Inc. | Systems and methods for medical stapling |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| KR20210149805A (ko) | 2019-04-08 | 2021-12-09 | 아우리스 헬스, 인코포레이티드 | 동시 절차를 위한 시스템, 방법, 및 작업흐름 |
| EP3989862A4 (en) | 2019-06-25 | 2023-10-04 | Auris Health, Inc. | MEDICAL INSTRUMENTS INCLUDING WRISTS WITH HYBRID REORIENTATION SURFACES |
| EP3989841A4 (en) | 2019-06-26 | 2023-09-20 | Auris Health, Inc. | SYSTEMS AND METHODS FOR ROBOTIC ARM ALIGNMENT AND MOORING |
| WO2020263629A1 (en) | 2019-06-27 | 2020-12-30 | Auris Health, Inc. | Systems and methods for a medical clip applier |
| CN114051403A (zh) | 2019-06-28 | 2022-02-15 | 奥瑞斯健康公司 | 用于机器人系统的患者导引器 |
| EP3989863A4 (en) | 2019-06-28 | 2023-10-11 | Auris Health, Inc. | MEDICAL INSTRUMENTS WITH WRISTS WITH HYBRID DIVERSION SURFACES |
| US11872007B2 (en) | 2019-06-28 | 2024-01-16 | Auris Health, Inc. | Console overlay and methods of using same |
| CN114340540B (zh) * | 2019-08-30 | 2023-07-04 | 奥瑞斯健康公司 | 器械图像可靠性系统和方法 |
-
2020
- 2020-08-27 CN CN202080061228.5A patent/CN114340540B/zh active Active
- 2020-08-27 WO PCT/IB2020/058023 patent/WO2021038495A1/en unknown
- 2020-08-27 US US17/005,165 patent/US11147633B2/en active Active
- 2020-08-27 JP JP2022513189A patent/JP7451686B2/ja active Active
- 2020-08-27 KR KR1020227010429A patent/KR20220058918A/ko not_active Application Discontinuation
- 2020-08-27 EP EP20856923.6A patent/EP4021329A4/en active Pending
-
2021
- 2021-10-14 US US17/501,943 patent/US11944422B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20210059765A1 (en) | 2021-03-04 |
| US20220031402A1 (en) | 2022-02-03 |
| WO2021038495A1 (en) | 2021-03-04 |
| EP4021329A4 (en) | 2023-05-03 |
| CN114340540B (zh) | 2023-07-04 |
| US11944422B2 (en) | 2024-04-02 |
| CN114340540A (zh) | 2022-04-12 |
| EP4021329A1 (en) | 2022-07-06 |
| US11147633B2 (en) | 2021-10-19 |
| JP2022546419A (ja) | 2022-11-04 |
| JP7451686B2 (ja) | 2024-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102455671B1 (ko) | 이미지-기반 기도 분석 및 매핑 | |
| AU2018347464B2 (en) | Image-based branch detection and mapping for navigation | |
| US10835153B2 (en) | System and method for medical instrument navigation and targeting | |
| KR20210016438A (ko) | 위치 센서-기반 분지부 예측을 위한 시스템 및 방법 | |
| JP7451686B2 (ja) | 器具画像信頼性システム及び方法 | |
| KR20220058569A (ko) | 위치 센서의 가중치-기반 정합을 위한 시스템 및 방법 | |
| EP4312856A1 (en) | Vision-based 6dof camera pose estimation in bronchoscopy | |
| CN110832544B (zh) | 用于导航的基于图像的分支检测和映射 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal |