JP5669529B2 - 撮像装置、プログラム及びフォーカス制御方法 - Google Patents
撮像装置、プログラム及びフォーカス制御方法 Download PDFInfo
- Publication number
- JP5669529B2 JP5669529B2 JP2010257025A JP2010257025A JP5669529B2 JP 5669529 B2 JP5669529 B2 JP 5669529B2 JP 2010257025 A JP2010257025 A JP 2010257025A JP 2010257025 A JP2010257025 A JP 2010257025A JP 5669529 B2 JP5669529 B2 JP 5669529B2
- Authority
- JP
- Japan
- Prior art keywords
- focusing
- unit
- image
- focusing process
- focus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 337
- 238000003384 imaging method Methods 0.000 title claims description 89
- 230000008569 process Effects 0.000 claims description 307
- 238000012545 processing Methods 0.000 claims description 184
- 238000004364 calculation method Methods 0.000 claims description 113
- 239000013598 vector Substances 0.000 claims description 54
- 230000003287 optical effect Effects 0.000 claims description 40
- 238000001514 detection method Methods 0.000 claims description 36
- 230000008859 change Effects 0.000 claims description 26
- 238000006243 chemical reaction Methods 0.000 claims description 12
- 230000002123 temporal effect Effects 0.000 claims description 8
- 238000011156 evaluation Methods 0.000 description 7
- 238000005286 illumination Methods 0.000 description 7
- 230000010354 integration Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 7
- 210000004204 blood vessel Anatomy 0.000 description 6
- 230000003902 lesion Effects 0.000 description 6
- 230000001276 controlling effect Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 239000000835 fiber Substances 0.000 description 4
- 210000001035 gastrointestinal tract Anatomy 0.000 description 4
- 238000012327 Endoscopic diagnosis Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 238000004590 computer program Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 230000000875 corresponding effect Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000002265 prevention Effects 0.000 description 3
- NAWXUBYGYWOOIX-SFHVURJKSA-N (2s)-2-[[4-[2-(2,4-diaminoquinazolin-6-yl)ethyl]benzoyl]amino]-4-methylidenepentanedioic acid Chemical compound C1=CC2=NC(N)=NC(N)=C2C=C1CCC1=CC=C(C(=O)N[C@@H](CC(=C)C(O)=O)C(O)=O)C=C1 NAWXUBYGYWOOIX-SFHVURJKSA-N 0.000 description 2
- 101100478627 Arabidopsis thaliana S-ACP-DES2 gene Proteins 0.000 description 2
- 101000836261 Homo sapiens U4/U6.U5 tri-snRNP-associated protein 2 Proteins 0.000 description 2
- 101150038966 SAD2 gene Proteins 0.000 description 2
- 102100027243 U4/U6.U5 tri-snRNP-associated protein 2 Human genes 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 230000010349 pulsation Effects 0.000 description 2
- 229920006395 saturated elastomer Polymers 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- 230000002596 correlated effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000002572 peristaltic effect Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/61—Control of cameras or camera modules based on recognised objects
- H04N23/611—Control of cameras or camera modules based on recognised objects where the recognised objects include parts of the human body
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/90—Arrangement of cameras or camera modules, e.g. multiple cameras in TV studios or sports stadiums
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
- Focusing (AREA)
Description
本実施形態が行う合焦処理の概要について説明する。まず、コントラストAF(AF:Auto-Focus)について説明する。図5に示すように、複数の焦点位置d1〜d5において画像を撮像し、その画像からコントラスト値(例えば高周波成分やエッジ量など)を求める。そして、求めた複数のコントラスト値の中で、コントラスト値が最大となる焦点位置を合焦位置とする。あるいは、d1〜d5でのコントラスト値を補間する処理を行い、補間処理後のコントラスト値が最大となる焦点位置を推定し、推定された焦点位置を合焦位置としてもよい。
2.1.内視鏡システムの第1の構成例
図1に、内視鏡システム(内視鏡装置)の第1の構成例を示す。内視鏡システムは、光源部100、撮像部200、制御装置300(画像処理部)、表示部400、外部I/F部500を含む。
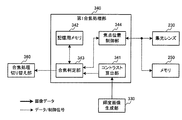
次に、第1の合焦処理について詳細に説明する。図6に、第1合焦処理部の詳細な構成例を示す。図6に示すように第1合焦処理部340は、コントラスト算出部341、記憶用メモリ342(記憶部)、合焦判定部343、焦点位置制御部344を含む。コントラスト算出部341は合焦判定部343に接続されている。焦点位置制御部344は合焦判定部343と、集光レンズ230と、メモリ250に接続されている。また、記憶用メモリ342は、合焦判定部343と双方向に接続されている。
(i)まず、記憶用メモリ342の内容をすべて“0”にセットする。記憶用メモリ342には後述するように、コントラストC_memと焦点位置d_memが保持される。
一方、上式(3)の関係が成立しない場合は、以下の(vi)の処理を実行する。
次に、第2の合焦処理について詳細に説明する。まず、画像の輝度値に基づいて、撮像部と被写体との間の相対的な移動量を検出する手法について説明する。

とする。
図11に、切り替え判定部357aの詳細な構成例を示す。切り替え判定部357aは、コントラスト判定部770、経過時間判定部771、平均輝度判定部772を含む。コントラスト判定部770と、経過時間判定部771と、平均輝度判定部772はそれぞれ制御部370に接続されている。
第1の実施形態では、輝度画像の平均輝度に基づいて上式(6)を用いて初期フレームを基準とした相対的な移動量を検出する手法について説明したが、本実施形態では、輝度画像の周波数特性に基づいて移動量を検出してもよい。
第1の実施形態では、輝度画像の平均輝度に基づいて上式(6)を用いて初期フレームを基準とした相対的な移動量を検出する手法について説明したが、本実施形態では、輝度画像の局所領域より検出した動きベクトル(広義には動き情報)に基づいて移動量を検出してもよい。
上記の本実施形態では、制御装置300を構成する各部をハードウェアで構成することとしたが、これに限定されるものではない。例えば、撮像部により取得された画像に対してCPUが各部の処理を行う構成とし、CPUがプログラムを実行することによってソフトウェアとして実現することとしてもよい。あるいは、各部が行う処理の一部をソフトウェアで構成することとしてもよい。
210 ライトガイドファイバ、220 照明レンズ、230 集光レンズ、
240 撮像素子、250 メモリ、300 制御装置、310 補間処理部、
320 表示画像生成部、330 輝度画像生成部、340 第1合焦処理部、
341 コントラスト算出部、342 記憶用メモリ、343 合焦判定部、
344 焦点位置制御部、350 第2合焦処理部、
351,355,356 移動量検出部、352 経過時間算出部、
353 合焦位置算出部、354 焦点位置制御部、
357a,357b,357c 切り替え判定部、358 コントラスト算出部、
360 合焦処理切り替え部、361 動きベクトル算出部、370 制御部、
400 表示部、500 外部I/F部、
600 コンピュータシステム、610 本体部、
611 CPU、612 RAM、613 ROM、614 HDD、
615 CD−ROMドライブ、616 USBポート、
617 I/Oインターフェース、618 LANインターフェース、
620 ディスプレイ、621 表示画面、630 キーボード、640 マウス、
650 モデム、660 CD−ROM、670 USBメモリ、681 PC、
682 サーバ、683 プリンタ、
710 平均輝度算出部、711 平均輝度記憶部、712 移動量算出部、
750 周波数特性取得部、751 周波数特性記憶部、752 移動量算出部、
753 移動量積算部、760 局所領域設定部、761 動きベクトル算出部、
762 フレームメモリ、763 移動量算出部、770 コントラスト判定部、
771 経過時間判定部、772 平均輝度判定部、773,774 算出精度判定部、
A,A’,Aall 移動量、C,Cnow,Corg コントラスト、CTH 閾値、
D,A×D 距離、d1〜d5,dnow,dorg 焦点位置、dist 距離、
f 周波数軸、f,f1now,f2now,f1pre,f2pre 周波数、
FNUM フレーム数、FTH 閾値、N1 広域エリアネットワーク、
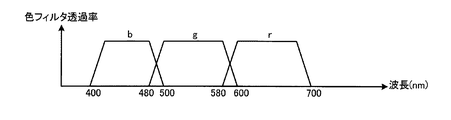
N3 公衆回線、p,q 座標、r,g,b 色フィルタ、R1,R2 周波数特性、
rdpre,rdnow 局所領域間の距離、S1,S2 局所領域、SAD 誤差値、
SADmin 誤差値の最小値、SADTH 閾値、Wnow,Wpre 周波数特性、
x 変換倍率、Y 輝度信号、Ymin,Ymax 閾値、
Ynow,Yorg 平均輝度値、ε 誤差値、εmin 誤差値の最小値、
εTH 閾値
Claims (20)
- 光学系を有し、複数の焦点位置の画像を時系列に取得する撮像部と、
時系列に取得された前記複数の焦点位置の画像のコントラスト値を算出し、算出した前記コントラスト値に基づいて第1の合焦処理を行って前記光学系の前記焦点位置を制御する第1合焦処理部と、
前記撮像部と被写体の間の相対的な移動量を検出し、前記撮像部と被写体との距離に応じて段階的に定められた焦点位置に対して前記光学系の前記焦点位置を前記検出した前記移動量に基づいて制御して、第2の合焦処理を行う第2合焦処理部と、
前記第1の合焦処理が成されたか否かを判定する合焦判定部と、
前記合焦判定部により前記第1の合焦処理が成されたと判定された場合に、前記第1の合焦処理から前記第2の合焦処理に切り替える合焦処理切り替え部と、
を備え、
前記第2合焦処理部は、
前記切り替えが行われた後に時系列に取得される前記画像の各画像に対して前記第2の合焦処理を行い、
前記第2合焦処理部は、
前記第2の合焦処理における合焦状態を評価するためのパラメータに基づいて、合焦処理を切り替えるか否かを判定する切り替え判定部を有し、
前記合焦処理切り替え部は、
前記切り替え判定部からの判定結果に基づいて、前記第2の合焦処理から前記第1の合焦処理に切り替えることを特徴とする撮像装置。 - 請求項1において、
前記パラメータは、
前記第2の合焦処理に用いられる制御パラメータであることを特徴とする撮像装置。 - 請求項1において、
前記第2合焦処理部は、
取得された前記画像に基づいてコントラスト値を算出するコントラスト算出部を有し、
前記切り替え判定部は、
前記コントラスト値を前記パラメータとして、合焦処理を切り替えるか否かの前記判定を行うことを特徴とする撮像装置。 - 請求項1において、
前記第2合焦処理部は、
取得された前記画像の平均輝度を算出する平均輝度算出部を有し、
前記切り替え判定部は、
前記平均輝度を前記パラメータとして、合焦処理を切り替えるか否かの前記判定を行うことを特徴とする撮像装置。 - 請求項1において、
前記第2合焦処理部は、
取得された前記画像の周波数特性を取得する周波数特性取得部を有し、
前記切り替え判定部は、
合焦処理を切り替えるか否かの前記判定を、前記周波数特性に基づいて行うことを特徴とする撮像装置。 - 請求項5において、
前記撮像部は、
前記画像として、時系列に第1の画像と第2の画像を取得し、
前記第2合焦処理部は、
前記第1の画像の周波数特性と前記第2の画像の周波数特性のマッチング処理を行い、マッチング誤差を表す誤差値に基づいて前記第2の合焦処理を行い、
前記切り替え判定部は、
前記パラメータとしての前記誤差値が閾値より大きい場合に、前記第2の合焦処理から前記第1の合焦処理に切り替える判定を行うことを特徴とする撮像装置。 - 請求項1において、
前記撮像部は、
前記画像として、時系列に第1の画像と第2の画像を取得し、
前記第2合焦処理部は、
前記第1の画像と前記第2の画像のマッチング処理を行って被写体の動きベクトルを検出する動きベクトル検出部を有し、
前記動きベクトル検出部は、
前記マッチング処理において、マッチング誤差を表す誤差値を求め、
前記切り換え判定部は、
前記誤差値を前記パラメータとして、合焦処理を切り替えるか否かの前記判定を行うことを特徴とする撮像装置。 - 請求項1において、
前記第2合焦処理部は、
前記合焦処理切り替え部により前記第2の合焦処理に切り替えられた後の経過時間を計測する経過時間算出部を有し、
前記切り替え判定部は、
前記経過時間を前記パラメータとして、合焦処理を切り替えるか否かの前記判定を行うことを特徴とする撮像装置。 - 請求項1において、
前記第2合焦処理部は、
前記撮像部と被写体の間の相対的な移動量を検出する移動量検出部を有し、
前記第2合焦処理部は、
前記移動量に基づいて前記光学系の前記焦点位置を制御することを特徴とする撮像装置。 - 請求項9において、
前記移動量検出部は、
取得された前記画像の画像信号の時間的な変化量に基づいて前記移動量を検出することを特徴とする撮像装置。 - 請求項10において、
前記撮像部は、
前記画像として、時系列に第1の画像と第2の画像を取得し、
前記移動量検出部は、
前記第1の画像の平均輝度値と前記第2の画像の平均輝度値との比を前記画像信号の時間的な変化量として、前記移動量を検出することを特徴とする撮像装置。 - 請求項9において、
前記第2合焦処理部は、
取得された前記画像の周波数特性を取得する周波数特性取得部を有し、
前記移動量検出部は、
前記周波数特性に基づいて前記移動量を検出することを特徴とする撮像装置。 - 請求項12において、
前記撮像部は、
前記画像として、時系列に第1の画像と第2の画像を取得し、
前記移動量検出部は、
前記第2の画像の周波数特性に対して周波数軸のスケール変換を行い、前記スケール変換の変換倍率を変化させながら前記第1の画像の周波数特性と前記第2の画像の周波数特性のマッチング処理を行い、マッチング誤差を表す誤差値が最も小さい前記変換倍率に基づいて前記移動量を検出することを特徴とする撮像装置。 - 請求項9において、
前記第2合焦処理部は、
取得された前記画像から動きベクトルを検出する動きベクトル検出部を有し、
前記移動量検出部は、
検出された前記動きベクトルに基づいて前記移動量を検出することを特徴とする撮像装置。 - 請求項1において、
前記光学系は、
所定数の焦点位置の中から一つの焦点位置を選択することで前記焦点位置を変更することを特徴とする撮像装置。 - 請求項1において、
前記光学系は、
ズーム処理を行い、
前記第1合焦処理部は、
通常観察モードよりも前記ズーム処理の倍率が高倍率に設定された拡大観察モードにおいて、前記第1の合焦処理を行い、
前記第2合焦処理部は、
前記拡大観察モードにおいて、前記第2の合焦処理を行うことを特徴とする撮像装置。 - 請求項9において、
前記第2合焦処理部は、
前記移動量が閾値より小さい場合、前記光学系の前記焦点位置を変更しないことを特徴とする撮像装置。 - 請求項1において、
前記第1合焦処理部は、
取得された前記画像から前記コントラスト値を算出するコントラスト算出部を有し、
前記第1合焦処理部は、
前記コントラスト値に基づいて前記第1の合焦処理を行って前記光学系の前記焦点位置を制御することを特徴とする撮像装置。 - 光学系を有する撮像部により時系列に取得された複数の焦点位置の画像のコントラスト値を算出し、算出した前記コントラスト値に基づいて第1の合焦処理を行って前記光学系の焦点位置を制御する第1合焦処理部と、
前記撮像部と被写体の間の相対的な移動量を検出し、前記撮像部と被写体との距離に応じて段階的に定められた焦点位置に対して前記光学系の前記焦点位置を前記検出した前記移動量に基づいて制御して、第2の合焦処理を行う第2合焦処理部と、
前記第1の合焦処理が成されたか否かを判定する合焦判定部と、
前記合焦判定部により前記第1の合焦処理が成されたと判定された場合に、前記第1の合焦処理から前記第2の合焦処理に切り替える合焦処理切り替え部として、
コンピュータを機能させ、
前記第2合焦処理部は、
前記切り替えが行われた後に時系列に取得される前記画像の各画像に対して前記第2の合焦処理を行い、
前記第2合焦処理部は、
前記第2の合焦処理における合焦状態を評価するためのパラメータに基づいて、合焦処理を切り替えるか否かを判定する切り替え判定部を有し、
前記合焦処理切り替え部は、
前記切り替え判定部からの判定結果に基づいて、前記第2の合焦処理から前記第1の合焦処理に切り替えることを特徴とするプログラム。 - 光学系を有する撮像部により時系列に取得された複数の焦点位置の画像のコントラスト値を算出し、算出した前記コントラスト値に基づいて第1の合焦処理を行って前記光学系の焦点位置を制御し、
前記撮像部と被写体の間の相対的な移動量を検出し、前記撮像部と被写体との距離に応じて段階的に定められた焦点位置に対して前記光学系の前記焦点位置を前記検出した前記移動量に基づいて制御して、第2の合焦処理を行い、
前記第1の合焦処理が成されたか否かを判定し、
前記合焦判定部により前記第1の合焦処理が成されたと判定された場合に、前記第1の合焦処理から前記第2の合焦処理に切り替え、
前記切り替えが行われた後に時系列に取得される前記画像の各画像に対して前記第2の合焦処理を行い、
前記第2の合焦処理における合焦状態を評価するためのパラメータに基づいて、合焦処理を切り替えるか否かを判定し、
前記合焦処理を切り替えるか否かの判定結果に基づいて、前記第2の合焦処理から前記第1の合焦処理に切り替える、
ことを特徴とするフォーカス制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010257025A JP5669529B2 (ja) | 2010-11-17 | 2010-11-17 | 撮像装置、プログラム及びフォーカス制御方法 |
| US13/291,423 US20120120305A1 (en) | 2010-11-17 | 2011-11-08 | Imaging apparatus, program, and focus control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010257025A JP5669529B2 (ja) | 2010-11-17 | 2010-11-17 | 撮像装置、プログラム及びフォーカス制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012108313A JP2012108313A (ja) | 2012-06-07 |
| JP2012108313A5 JP2012108313A5 (ja) | 2013-12-26 |
| JP5669529B2 true JP5669529B2 (ja) | 2015-02-12 |
Family
ID=46047446
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010257025A Active JP5669529B2 (ja) | 2010-11-17 | 2010-11-17 | 撮像装置、プログラム及びフォーカス制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20120120305A1 (ja) |
| JP (1) | JP5669529B2 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010049004A1 (en) * | 2008-10-31 | 2010-05-06 | Hewlett-Packard Development Company, L.P. | Method and digital imaging appliance adapted for selecting a focus setting |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| KR101795604B1 (ko) * | 2011-11-24 | 2017-11-09 | 삼성전자주식회사 | 자동 초점 조절 장치 및 그 제어방법 |
| US9277111B2 (en) * | 2012-05-18 | 2016-03-01 | Canon Kabushiki Kaisha | Image capture apparatus and control method therefor |
| JP5820794B2 (ja) * | 2012-10-05 | 2015-11-24 | オリンパス株式会社 | 撮像装置 |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| EP2957217A4 (en) * | 2013-06-12 | 2017-03-01 | Olympus Corporation | Endoscope system |
| US20150022679A1 (en) * | 2013-07-16 | 2015-01-22 | Motorola Mobility Llc | Fast Motion Detection with GPU |
| CN105378534B (zh) | 2013-10-04 | 2018-01-02 | 奥林巴斯株式会社 | 摄像装置、摄像装置的工作方法 |
| WO2015064462A1 (ja) * | 2013-10-31 | 2015-05-07 | オリンパスメディカルシステムズ株式会社 | 撮像システム、撮像システムの作動方法 |
| JP6243364B2 (ja) * | 2015-01-26 | 2017-12-06 | 富士フイルム株式会社 | 内視鏡用のプロセッサ装置、及び作動方法、並びに制御プログラム |
| CN108778113B (zh) | 2015-09-18 | 2022-04-15 | 奥瑞斯健康公司 | 管状网络的导航 |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| KR101850363B1 (ko) * | 2016-02-16 | 2018-04-20 | 주식회사 이오테크닉스 | 촬영장치 및 촬영방법 |
| KR101993670B1 (ko) * | 2016-03-17 | 2019-06-27 | 주식회사 이오테크닉스 | 촬영 방법 및 촬영 방법을 이용한 대상물 정렬 방법 |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| US11490782B2 (en) | 2017-03-31 | 2022-11-08 | Auris Health, Inc. | Robotic systems for navigation of luminal networks that compensate for physiological noise |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| KR20200100613A (ko) | 2017-12-14 | 2020-08-26 | 아우리스 헬스, 인코포레이티드 | 기구 위치 추정을 위한 시스템 및 방법 |
| KR20200101334A (ko) | 2017-12-18 | 2020-08-27 | 아우리스 헬스, 인코포레이티드 | 관강내 조직망 내 기구 추적 및 항행을 위한 방법 및 시스템 |
| JP7225259B2 (ja) | 2018-03-28 | 2023-02-20 | オーリス ヘルス インコーポレイテッド | 器具の推定位置を示すためのシステム及び方法 |
| EP3773131B1 (en) | 2018-03-28 | 2024-07-10 | Auris Health, Inc. | Systems for registration of location sensors |
| WO2019231895A1 (en) | 2018-05-30 | 2019-12-05 | Auris Health, Inc. | Systems and methods for location sensor-based branch prediction |
| WO2019231891A1 (en) | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Path-based navigation of tubular networks |
| CN110831538B (zh) | 2018-05-31 | 2023-01-24 | 奥瑞斯健康公司 | 基于图像的气道分析和映射 |
| WO2019231990A1 (en) * | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Robotic systems and methods for navigation of luminal network that detect physiological noise |
| JP7166821B2 (ja) * | 2018-07-18 | 2022-11-08 | ソニー・オリンパスメディカルソリューションズ株式会社 | 医療用撮像装置及び医療用観察システム |
| JP7536752B2 (ja) | 2018-09-28 | 2024-08-20 | オーリス ヘルス インコーポレイテッド | 内視鏡支援経皮的医療処置のためのシステム及び方法 |
| US11147633B2 (en) | 2019-08-30 | 2021-10-19 | Auris Health, Inc. | Instrument image reliability systems and methods |
| US11207141B2 (en) | 2019-08-30 | 2021-12-28 | Auris Health, Inc. | Systems and methods for weight-based registration of location sensors |
| EP4084720A4 (en) | 2019-12-31 | 2024-01-17 | Auris Health, Inc. | ALIGNMENT TECHNIQUES FOR PERCUTANE ACCESS |
| US11602372B2 (en) | 2019-12-31 | 2023-03-14 | Auris Health, Inc. | Alignment interfaces for percutaneous access |
| US11298195B2 (en) | 2019-12-31 | 2022-04-12 | Auris Health, Inc. | Anatomical feature identification and targeting |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2772079B2 (ja) * | 1989-01-09 | 1998-07-02 | オリンパス光学工業株式会社 | 自動合焦装置 |
| JP2979182B2 (ja) * | 1992-06-15 | 1999-11-15 | 富士写真フイルム株式会社 | フォーカスレンズ駆動装置並びにフォーカスレンズ及び絞り駆動装置 |
| US6972798B1 (en) * | 1999-08-31 | 2005-12-06 | Canon Kabushiki Kaisha | Focusing device and method |
| JP3955458B2 (ja) * | 2001-11-06 | 2007-08-08 | ペンタックス株式会社 | 内視鏡のオートフォーカス装置 |
| JP2004205982A (ja) * | 2002-12-26 | 2004-07-22 | Pentax Corp | 自動焦点調節装置 |
| JP4595563B2 (ja) * | 2005-01-27 | 2010-12-08 | ソニー株式会社 | オートフォーカス制御装置、オートフォーカス制御方法および撮像装置 |
| JP2006319596A (ja) * | 2005-05-12 | 2006-11-24 | Fuji Photo Film Co Ltd | 撮像装置および撮像方法 |
| US7909256B2 (en) * | 2005-12-31 | 2011-03-22 | Motorola Mobility, Inc. | Method and system for automatically focusing a camera |
| JP2008052225A (ja) * | 2006-08-28 | 2008-03-06 | Olympus Imaging Corp | カメラ、合焦制御方法、プログラム |
| JP2008090059A (ja) * | 2006-10-03 | 2008-04-17 | Samsung Techwin Co Ltd | 撮像装置およびそのオートフォーカス制御方法 |
| JP5028138B2 (ja) * | 2007-05-08 | 2012-09-19 | オリンパス株式会社 | 画像処理装置および画像処理プログラム |
| JP5048468B2 (ja) * | 2007-11-28 | 2012-10-17 | 富士フイルム株式会社 | 撮像装置およびその撮像方法 |
| JP5483953B2 (ja) * | 2009-08-18 | 2014-05-07 | キヤノン株式会社 | 焦点調節装置、焦点調節方法及びプログラム |
| US8248448B2 (en) * | 2010-05-18 | 2012-08-21 | Polycom, Inc. | Automatic camera framing for videoconferencing |
-
2010
- 2010-11-17 JP JP2010257025A patent/JP5669529B2/ja active Active
-
2011
- 2011-11-08 US US13/291,423 patent/US20120120305A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20120120305A1 (en) | 2012-05-17 |
| JP2012108313A (ja) | 2012-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5669529B2 (ja) | 撮像装置、プログラム及びフォーカス制御方法 | |
| JP5562808B2 (ja) | 内視鏡装置及びプログラム | |
| JP5816511B2 (ja) | 画像処理装置、内視鏡装置及び画像処理装置の作動方法 | |
| WO2012032914A1 (ja) | 画像処理装置、内視鏡装置、画像処理プログラム及び画像処理方法 | |
| JP5576739B2 (ja) | 画像処理装置、画像処理方法、撮像装置及びプログラム | |
| US9345391B2 (en) | Control device, endoscope apparatus, aperture control method, and information storage medium | |
| CN107005646B (zh) | 对焦控制装置、内窥镜装置以及对焦控制装置的控制方法 | |
| JP2014207645A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP6453905B2 (ja) | フォーカス制御装置、内視鏡装置及びフォーカス制御装置の制御方法 | |
| JP6103849B2 (ja) | 内視鏡装置及び内視鏡装置の作動方法 | |
| JP6574448B2 (ja) | 内視鏡装置及び内視鏡装置のフォーカス制御方法 | |
| JP2012245157A (ja) | 内視鏡装置 | |
| WO2017122287A1 (ja) | 内視鏡装置及び内視鏡装置の作動方法 | |
| WO2017221507A1 (ja) | 内視鏡システム | |
| JP2012239644A (ja) | 画像処理装置、内視鏡装置、画像処理方法 | |
| JP5063480B2 (ja) | オートフォーカス機構付き撮像システム及びその調整方法 | |
| JP6120491B2 (ja) | 内視鏡装置及び内視鏡装置のフォーカス制御方法 | |
| JP2012110481A (ja) | 内視鏡装置、フォーカス制御方法及びプログラム | |
| JP6242230B2 (ja) | 画像処理装置、内視鏡装置、画像処理装置の作動方法及び画像処理プログラム | |
| US9323978B2 (en) | Image processing device, endoscope apparatus, and image processing method | |
| JP6530067B2 (ja) | 内視鏡装置及び内視鏡装置の作動方法 | |
| WO2022191058A1 (ja) | 内視鏡画像処理装置、方法及びプログラム | |
| JP6653386B2 (ja) | 画像処理装置、内視鏡システム、プログラム及び画像処理装置の作動方法 | |
| JP2012055412A (ja) | 画像処理装置、内視鏡装置、画像処理方法及びプログラム | |
| CN114785948B (zh) | 内窥镜调焦方法、装置、内镜图像处理器及可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140827 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141029 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141125 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141216 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5669529 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |