KR20140143165A - 무단 변속기의 제어 장치 - Google Patents
무단 변속기의 제어 장치 Download PDFInfo
- Publication number
- KR20140143165A KR20140143165A KR1020147027834A KR20147027834A KR20140143165A KR 20140143165 A KR20140143165 A KR 20140143165A KR 1020147027834 A KR1020147027834 A KR 1020147027834A KR 20147027834 A KR20147027834 A KR 20147027834A KR 20140143165 A KR20140143165 A KR 20140143165A
- Authority
- KR
- South Korea
- Prior art keywords
- control
- vehicle
- gradient
- ratio
- speed
- Prior art date
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66227—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling shifting exclusively as a function of speed and torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66254—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling
- F16H61/66259—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling using electrical or electronical sensing or control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H37/00—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00
- F16H37/02—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings
- F16H37/021—Combinations of mechanical gearings, not provided for in groups F16H1/00 - F16H35/00 comprising essentially only toothed or friction gearings toothed gearing combined with continuous variable friction gearing
- F16H2037/023—CVT's provided with at least two forward and one reverse ratio in a serial arranged sub-transmission
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
- F16H2059/663—Road slope
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H2061/6604—Special control features generally applicable to continuously variable gearings
- F16H2061/6605—Control for completing downshift at hard braking
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H2061/66204—Control for modifying the ratio control characteristic
- F16H2061/66209—Control for modifying the ratio control characteristic dependent on ambient conditions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2312/00—Driving activities
- F16H2312/02—Driving off
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/70—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for change-speed gearing in group arrangement, i.e. with separate change-speed gear trains arranged in series, e.g. range or overdrive-type gearing arrangements
- F16H61/702—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for change-speed gearing in group arrangement, i.e. with separate change-speed gear trains arranged in series, e.g. range or overdrive-type gearing arrangements using electric or electrohydraulic control means
Abstract
차량의 엔진(1)과 구동륜(7) 사이에서 동력을 단접하는 마찰 결합 요소(32)와, 무단 변속기(4)의 변속비 및 마찰 결합 요소(32)를 제어하는 제어 수단(11, 12)을 구비한다. 제어 수단은, 차속이 0으로 된 차량 정지 시에 변속비가 최대 변속비가 아닌 경우에, 마찰 결합 요소(32)를 슬립 상태로 제어하면서 변속비를 최대 변속비로 조작한다. 또한, 이때, 도로가 오르막 구배인 경우, 구배에 대응한 결합압 및 엔진 토크를 설정하고, 차량의 미끄러짐을 방지한다.
Description
본 발명은 차량에 탑재되는 무단 변속기의 제어 장치에 관한 것이다.
무단 변속기를 구비한 차량에서는, 정지 전의 감속 시에 변속비를 정지 시까지 최대 변속비까지 조작함으로써, 그 후의 재발진 시의 발진 성능을 확보하고 있다. 그러나, 주행 중의 급격한 제동에 의한 감속 시에는, 차량 정지까지의 시간이 짧으므로 정지 시까지 변속비를 최대 변속비까지 조작할 수 없고, 또한 감속 시에 차륜이 로크되어 버리면 변속비를 변경 조작하는 것조차 할 수 없다. 물론 정지 후에도, 변속비를 조작할 수는 없다.
특허문헌 1에는, 무단 변속기와 구동륜 사이에, 동력 전달 저지 수단으로서의 클러치 또는 브레이크를 갖는 부변속기를 구비한 차량에 있어서, 차량의 급제동이 검출되면 부변속기의 클러치 또는 브레이크를 해방하고 구동륜과의 사이에서 동력 전달 저지 상태로 함으로써 변속비를 변경 조작 가능하게 하여, 그 후의 재발진 시까지 변속비를 최대 변속비까지 조작하고, 이에 의해 발진 성능을 확보할 수 있도록 한 기술이 기재되어 있다.
그런데, 특허문헌 1의 기술의 경우, 동력 전달 저지 상태로서 변속비를 최대 변속비측으로 변경 조작하는 제어를 개시하면, 스로틀 밸브 개방도가 0(완전 폐쇄 상태)인 한, 변속비가 최대 변속비에 도달할 때까지는 이 제어가 실행된다. 따라서, 이 동력 전달 저지 상태에서 변속비 제어를 실행하고 있는 동안에는 구동륜에 동력이 전달되지 않는다. 이로 인해, 차량이 오르막길에서 정지하였을 때에 이 제어가 실시되고 있으면, 차량의 미끄러짐이 발생할 우려가 있다.
또한, 특허문헌 1의 기술에서는, 클러치나 브레이크에의 작동유 공급 유로로부터 작동유를 배출하여 배압을 행함으로써 동력 전달 저지를 실시하고 있으므로, 변속비 제어가 종료되어 동력 전달 저지 상태로부터 동력 전달 가능한 상태로 전환해도, 클러치나 브레이크가 결합할 때까지 타임 래그가 발생한다. 이로 인해, 재발진의 타이밍에 따라서는, 동력 전달 래그가 발생할 가능성이 있다. 이 래그를 저감시키기 위해 라인압을 높게 설정하는 것이 유효하지만, 이 경우, 클러치나 브레이크의 결합 쇼크를 초래하여 바람직하지 않다.
본 발명은 이러한 과제에 비추어 창안된 것으로, 차량의 급제동 시 등에 있어서, 오르막길에 정지한 경우라도 차량의 미끄러짐이 발생하는 일 없이 무단 변속기의 변속비를 최대 변속비(환언하면 최LOW 상태)로 변경 조작할 수 있도록 함과 함께, 라인압을 높게 설정하는 일 없이 재발진 시의 동력 전달 래그의 발생을 억제할 수 있도록 한, 무단 변속기의 제어 장치를 제공하는 것을 목적으로 하고 있다.
(1) 상기한 목적을 달성하기 위해, 본 발명의 무단 변속기의 제어 장치는, 차량의 엔진과 구동륜 사이에 탑재되고, 무단 변속 기구와, 상기 구동륜에의 출력부에 장비되어 동력을 단접(斷接)하는 마찰 결합 요소를 갖는 무단 변속기에 있어서, 상기 무단 변속 기구의 변속비 및 상기 마찰 결합 요소를 제어하는, 무단 변속기의 제어 장치이며, 상기 차량의 차속을 검출하는 차속 검출 수단과, 상기 변속비를 검출하는 변속비 검출 수단과, 상기 차속 검출 수단으로부터의 검출 차속 정보에 기초하여, 상기 차속이 0으로 된 차량 정지 시에, 상기 변속비 검출 수단에 의한 검출 변속비가 최대 변속비인지 여부를 판정하고, 상기 검출 변속비가 최대 변속비가 아닌 경우, 상기 마찰 결합 요소를 슬립 상태로 제어하면서 상기 변속비를 최대 변속비로 조작하는 로우 복귀 제어를 실시하는 제어 수단을 구비하고 있다.
(2) 상기 차량이 정지한 도로의 구배를 추정하는 구배 추정 수단을 더 구비하고, 상기 제어 수단은, 상기 구배 추정 수단에 의한 추정 도로 구배가 오르막 구배인지 여부를 판정하고, 상기 추정 도로 구배가 오르막 구배이며 상기 로우 복귀 제어를 실시할 때에는, 상기 마찰 결합 요소를 슬립 상태로 하는 결합압을 상기 추정 도로 구배에 따라 제어하는 것이 바람직하다.
(3) 이 경우, 상기 제어 수단은, 상기 추정 도로 구배가 오르막 구배이며 상기 로우 복귀 제어를 실시할 때에는, 상기 마찰 결합 요소의 결합압을 상기 추정 도로 구배에 따라 제어함과 함께, 상기 엔진에 필요한 토크를 상기 추정 도로 구배에 따라 설정하여 이 설정 토크를 상기 엔진의 제어 수단에 출력하는 것이 바람직하다.
(4) 또한, 상기 제어 수단은, 상기 구배 추정 수단에 의한 추정 도로 구배가 오르막 구배가 아니고 상기 로우 복귀 제어를 실시할 때, 상기 마찰 결합 요소가 슬립 상태로 되는 최소 결합압에 기초하여 상기 마찰 결합 요소의 결합압을 제어하는 것이 바람직하다.
(5) 상기 제어 수단은, 상기 차량 정지 시에 있어서의 상기 검출 변속비에 따라 제어 시간을 설정하고, 이 제어 시간만큼 상기 로우 복귀 제어를 실시하는 것이 바람직하다.
(6) 상기 제어 수단은, 슬립 상태로 된 상기 마찰 결합 요소의 입출력 회전 속도차가 미리 설정된 기준 회전 속도차 이상으로 되면 상기 로우 복귀 제어를 개시하는 것이 바람직하다.
(1) 본 발명의 무단 변속기의 제어 장치에 따르면, 차속이 0으로 된 차량 정지 시에는, 마찰 결합 요소를 슬립 상태로 제어하여 변속비를 변경 가능의 상태로 하면서 변속비를 최대 변속비로 조작하는 로우 복귀 제어를 실시한다. 이에 의해, 차량의 급제동 정지 시에도, 변속비를 최대 변속비로 조작할 수 있음과 함께, 구동륜에의 동력이 완전히 빠지는 일이 없으므로 예를 들어 정지한 도로가 오르막길이라도 차량의 미끄러짐을 억제할 수 있다. 또한, 마찰 결합 요소가 슬립 상태이므로 재발진 시의 동력 전달 래그의 발생을 억제할 수 있고, 라인압을 높게 설정할 필요도 없다.
(2) 또한, 차량이 정지한 도로가 오르막 구배(즉, 오르막길)인 경우, 마찰 결합 요소를 슬립 상태로 하는 결합압을 추정 도로 구배에 따라 설정하고, 이 설정압으로 되도록 상기 마찰 결합 요소의 결합압을 제어함으로써, 정지한 도로가 오르막길인 경우의 차량의 미끄러짐을 확실하게 억제하면서, 변속비를 최대 변속비로 조작할 수 있다.
(3) 이 경우, 또한, 엔진에 필요한 토크를 추정 도로 구배에 따라 설정하여 엔진 토크를 이 설정 토크로 제어함으로써, 정지한 도로가 오르막길인 경우의 차량의 미끄러짐을 한층 더 확실하게 억제하면서, 변속비를 최대 변속비로 조작할 수 있다.
(4) 차량이 정지한 도로가 오르막 구배가 아닌 경우에 로우 복귀 제어를 실시할 때에는, 마찰 결합 요소가 슬립 상태로 되는 최소 결합압에 기초하여 마찰 결합 요소의 결합압을 제어함으로써, 결합압의 부여에 드는 에너지를 절약할 수 있다.
(5) 또한, 이때, 검출 변속비에 따른 제어 시간만큼 로우 복귀 제어를 실시하도록 하면, 심플한 로직으로 로우 복귀 제어를 종료시킬 수 있다.
(6) 마찰 결합 요소의 입출력 회전 속도차가 미리 설정된 기준 회전 속도차 이상으로 되면 로우 복귀 제어를 개시함으로써, 로우 복귀 제어를 원활하게 실시할 수 있다.
도 1은 본 발명의 일 실시 형태에 관한 무단 변속기 및 그 제어 장치를 탑재한 차량의 구동계를 나타내는 구성도이다.
도 2는 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치의 제어계를 나타내는 구성도이다.
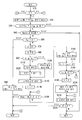
도 3은 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치에 의한 제어를 설명하는 흐름도(메인 루틴)이다.
도 4는 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치에 의한 제어를 설명하는 흐름도(서브 루틴)이며, (a)는 그 경사 제어를 나타내고, (b)는 그 클러치 슬립 제어를 나타내고, (c)는 그 클러치 체결 제어를 나타낸다.
도 2는 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치의 제어계를 나타내는 구성도이다.
도 3은 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치에 의한 제어를 설명하는 흐름도(메인 루틴)이다.
도 4는 본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치에 의한 제어를 설명하는 흐름도(서브 루틴)이며, (a)는 그 경사 제어를 나타내고, (b)는 그 클러치 슬립 제어를 나타내고, (c)는 그 클러치 체결 제어를 나타낸다.
이하, 도면을 사용하여 본 발명의 실시 형태를 설명한다.
도 1은 본 실시 형태에 관한 무단 변속기 및 그 제어 장치를 탑재한 차량의 구동계의 구성도이다. 도 1에 나타내는 바와 같이, 이 차량은 동력원으로서 엔진(1)을 구비한다. 엔진(1)의 출력 회전은, 로크업 클러치가 구비된 토크 컨버터(2), 제1 기어열(3), 무단 변속기(이하, 단순히 변속기라고도 함)(4), 제2 기어열(5), 종감속 장치(6)를 통해 구동륜(7)에 전달된다. 제2 기어열(5)에는 주차 시에 변속기(4)의 출력축을 기계적으로 회전 불가능하게 로크하는 파킹 기구(8)가 설치되어 있다.
또한, 이 차량에는, 엔진(1)의 동력의 일부를 이용하여 구동되는 오일 펌프(10)와, 오일 펌프(10)로부터의 유압을 압력 조절하여 변속기(4)의 각 부위에 공급하는 유압 제어 회로(11)와, 유압 제어 회로(11)를 제어하는 변속기 컨트롤러(변속기 ECU)(12)가 설치되어 있다. 유압 제어 회로(11)와 변속기 컨트롤러(12)로 변속에 관한 제어 수단이 구성된다.
각 구성에 대해 설명하면, 변속기(4)는, 벨트식 무단 변속 기구(단순히, CVT라고도 함)(20)와, 부변속 기구(30)가, 엔진(1)으로부터 구동륜(7)에 이르기까지의 동력 전달 경로에 있어서 직렬로 설치되어 있다. 부변속 기구(30)는, 변속기(4)에 있어서의 구동륜(7)에의 출력부, 즉, CVT(20)의 후단(출력측)에 배치되고, 동력을 단접하는 마찰 결합 요소를 포함하고 있다. 본 실시 형태에서는, 이러한 마찰 체결 요소로서 Low 브레이크(32)가 구비되지만, 상세는 후술한다. 또한, 부변속 기구(30)는, 이 예와 같이 CVT(20)의 출력축에 직접 접속되어 있어도 되고, 그 밖의 변속 내지 동력 전달 기구(예를 들어, 기어열)를 통해 접속되어 있어도 된다.
CVT(20)는, 프라이머리 풀리(21)와, 세컨더리 풀리(22)와, 이들 풀리(21, 22)의 사이에 권회되는 V 벨트(23)를 구비한다. 풀리(21, 22)는, 각각 고정 시브와, 이 고정 시브에 대해 시브면을 대향시킨 상태로 배치되고 고정 시브와의 사이에 V 홈을 형성하는 가동 시브와, 이 가동 시브의 배면에 설치되어 가동 시브를 축 방향으로 변위시키는 유압 실린더(23a, 23b)를 구비한다. 유압 실린더(23a, 23b)에 공급되는 유압을 조정하면, V 홈의 폭이 변화되어 V 벨트(23)와 각 풀리(21, 22)의 접촉 반경이 변화되고, CVT(20)의 변속비 Ratio가 무단계로 변화된다.
본 실시 형태에서는, 부변속 기구(30)는 전진 2단·후진 1단의 변속 기구이다. 부변속 기구(30)는 2개의 유성 기어의 캐리어를 연결한 라비뇨형 유성 기어 기구(31)와, 라비뇨형 유성 기어 기구(31)를 구성하는 복수의 회전 요소에 접속되고, 그들의 연계 상태를 변경하는 복수의 마찰 체결 요소[Low 브레이크(32), High 클러치(33), Rev 브레이크(34)]를 구비한다.
각 마찰 체결 요소(32∼34)에의 공급 유압을 조정하고, 각 마찰 체결 요소(32∼34)의 체결·해방 상태를 변경하면, 부변속 기구(30)의 변속단이 변경된다. 예를 들어, Low 브레이크(32)를 체결하고, High 클러치(33)와 Rev 브레이크(34)를 해방하면 부변속 기구(30)의 변속단은 1속으로 되고, 이때 「변속기(4)가 저속 모드이다」라고도 표현할 수 있다. High 클러치(33)를 체결하고, Low 브레이크(32)와 Rev 브레이크(34)를 해방하면 부변속 기구(30)의 변속단은 1속보다도 변속비가 작은 2속으로 되고, 이때 「변속기(4)가 고속 모드이다」라고도 표현할 수 있다. 또한, Rev 브레이크(34)를 체결하고, Low 브레이크(32)와 High 클러치(33)를 해방하면 부변속 기구(30)의 변속단은 후진으로 된다.
변속기 컨트롤러(12)는, 도 2에 나타내는 바와 같이, CPU(121)와, RAM·ROM으로 이루어지는 기억 장치(122)와, 입력 인터페이스(123)와, 출력 인터페이스(124)와, 이들을 서로 접속하는 버스(125)로 구성된다.
입력 인터페이스(123)에는, 엔진(1)의 스로틀 밸브의 개방도(이하, 「스로틀 개방도 TVO」라 함)를 검출하는 스로틀 개방도 센서(41)의 출력 신호, 프라이머리 풀리(21)의 회전 속도(이하, 프라이머리 회전 속도 Npri라 함)를 검출하는 프라이머리 회전 속도 센서(42)의 출력 신호, 세컨더리 풀리(22)의 회전 속도(이하, 세컨더리 회전 속도 Nsec라 함)를 검출하는 세컨더리 회전 속도 센서(43)의 출력 신호, 브레이크 스위치(44)의 검출 신호, 셀렉트 레버의 위치를 검출하는 인히비터 스위치(45)의 출력 신호, 차량의 주행 속도(이하, 차속 Vsp라 함)를 검출하는 차속 센서(46)의 출력 신호, 차량의 전후 가속도(이하, 가속도 Gbf라 함)를 검출하는 전후 G 센서(전후 가속도 센서)(47)의 출력 신호 등이 입력된다.
기억 장치(122)에는, 변속기(4)의 변속 제어 프로그램, 이 변속 제어 프로그램에서 사용하는 변속 맵(도시 생략)이 저장되어 있다. CPU(121)는, 기억 장치(122)에 저장되어 있는 변속 제어 프로그램을 판독하여 실행하고, 입력 인터페이스(123)를 통해 입력되는 각종 신호에 대해 각종 연산 처리를 실시하여 변속 제어 신호를 생성하고, 생성한 변속 제어 신호를, 출력 인터페이스(124)를 통해 유압 제어 회로(11)에 출력한다. CPU(121)가 연산 처리에서 사용하는 각종 값, 그 연산 결과는 기억 장치(122)에 적절히 저장된다.
유압 제어 회로(11)는 복수의 유로 및 복수의 유압 제어 밸브로 구성된다. 이 유압 제어 회로(11)는 변속기 컨트롤러(12)로부터의 변속 제어 신호에 기초하여, 복수의 유압 제어 밸브를 제어하여 유압의 공급 경로를 전환함과 함께 오일 펌프(10)에서 발생한 유압으로부터 필요한 유압을 조제하고, 이것을 변속기(4)의 각 부위에 공급한다. 이에 의해, CVT(20)의 변속비 Ratio, 부변속 기구(30)의 변속단이 변경되고, 변속기(4)의 변속이 행해진다.
〔무단 변속기의 제어 장치〕
여기서, 본 실시 형태에 관한 무단 변속기의 제어 장치를 설명한다.
본 제어 장치는, 유압 제어 회로(11) 및 변속기 컨트롤러(12)를 구비하고, CVT(20)의 변속비[프라이머리 풀리(21) 및 세컨더리 풀리(22)의 가동 풀리의 위치]와, 부변속 기구(30)의 마찰 체결 요소의 하나인 Low 브레이크(32)의 체결 상태와, 엔진(1)의 토크를 제어 대상으로 한다.
또한, 이 제어를 행하기 위해, 프라이머리 회전 속도 센서(42), 세컨더리 회전 속도 센서(43), 브레이크 스위치(44), 차속 센서(46), 전후 G 센서(47)로부터의 각 검출 신호가 이용된다.
또한, 프라이머리 회전 속도 센서(42) 및 세컨더리 회전 속도 센서(43)로부터의 검출 신호 Npri, Nsec는, 변속기 컨트롤러(12)의 기능 구성으로서 장비되는 변속비 산출부(12a)에 있어서의 CVT(20)의 변속비 Ratio(=Npri/Nsec)의 산출에 사용된다. 따라서, 프라이머리 회전 속도 센서(42), 세컨더리 회전 속도 센서(43) 및 변속비 산출부(12a)로부터 변속비 검출 수단이 구성된다.
또한, 차속 센서(46)의 검출 신호는, Low 브레이크(32)의 출력측의 회전 속도 Nout으로 환산되어, 변속기 컨트롤러(12)에 있어서, Low 브레이크(32)의 입력측의 회전 속도에 상당하는 세컨더리 회전 속도 센서(43)의 검출 신호(세컨더리 회전 속도) Nsec와, Low 브레이크(32)의 출력측의 회전 속도 Nout의 차(=Nsec-Nout)가 연산되어, 제어에 이용된다.
또한, 전후 G 센서(47)는 변속기 컨트롤러(12)의 기능 구성으로서 장비되는 구배각 추정부(12b)에 있어서의 차량이 정지한 도로의 구배(도로 구배)의 추정에 사용된다. 또한, 여기서는, 구배의 크기를 구배각(전후 경사각) θ로 나타낸다.
차량의 정지 시, 즉, 차속 센서(46)에 의해 검출된 차속 Vsp가 0인 경우에는, 도로가 구배가 없는 평탄로이면, 전후 G 센서(47)는 전후 G를 검출하지 않지만, 주행 노면에 구배가 있으면 전후 G 센서(47)가 중력에 반응하여, 오르막 구배(오르막길)에서는 정(正)의 전후 G의 값이, 내리막 구배(내리막길)에서는 부(負)의 전후 G의 값이 검출된다.
또한, 예를 들어 급격한 구배의 오르막길(구배각이 큰 오르막길)에 정차한 경우에는, 완만한 구배의 오르막길(구배각이 작은 오르막길)에 정차한 경우보다도, 검출되는 전후 G의 값은 커진다.
따라서, 차량의 정지 시에는, 전후 G 센서(47)의 검출값과, 구배각(전후 경사각) θ 사이에 명확한 대응 관계가 있고, 이 대응 관계를 미리 취득해 둠으로써, 전후 G 센서(47)의 검출값으로부터 구배각 θ를 추정할 수 있다.
본 실시 형태의 구배각 추정부(12b)에서는, 도시하지 않은 맵에, 이 전후 G와 구배각 θ의 대응 관계를 기록하고 있고, 이 맵을 사용하여 전후 G 센서(47)의 검출값으로부터 구배각 플랜지 ar을 추정한다.
그리고, 변속기 컨트롤러(12)에는, 차속 센서(46) 및 브레이크 스위치(44)로부터의 검출 정보에 기초하여, 차속이 0으로 된 차량 정지 시에, 변속비 검출 수단에 의해 검출된 검출 변속비 Ratio가 최대 변속비(즉, 최LOW 상태)인지 여부를 판정하고, 검출 변속비 Ratio가 최대 변속비가 아닌 경우, 마찰 결합 요소인 Low 브레이크(32)를 슬립 상태로 제어하면서 변속비를 최대 변속비로 조작하는 로우 복귀 제어를 실시하는 기능(로우 복귀 제어부)(12c)을 장비하고 있다.
이 로우 복귀 제어부(12c)에서는, 제동 조작에 의해 차속 Vsp가 일정 차속 이하로 저하되면 주행 중에 로우 복귀 제어를 행하는 일반적인 로우 복귀 제어(제2 로우 복귀 제어)와, 차량의 정지 시에 로우 복귀 제어를 행하는 정지 시 로우 복귀 제어(제1 로우 복귀 제어, 본 발명에 관한 로우 복귀 제어)를 행한다.
즉, 본 제어 장치는, 차량이 정지 후에 재시동할 때에 대비하여, CVT(20)의 변속비 Ratio를 미리 최LOW(즉, 최대 변속비)로 제어하는 로우 복귀 제어를 행하는 장치이며, 변속기 컨트롤러(12) 및 유압 제어 회로(11)로 구성된다. 변속기 컨트롤러(12)는 제동에 의해 차량이 감속하고 소정 차속 이하로 되면, 유압 제어 회로(11)를 통해 CVT(20)의 변속비 Ratio를 최LOW로 제어하지만, 이 제어는, 프라이머리 풀리(21)의 유압 실린더(23a)에 공급되는 유압을 감압 조정함으로써 행할 수 있다.
통상의 정지 시에는, 일정 시간 이상의 감속 시간이 있으므로, 이 감속 시간에 있어서 프라이머리 풀리(21)의 유압 실린더(23a)에 공급되는 유압을 감압하고, CVT(20)의 변속비 Ratio를 최LOW로 변경할 수 있지만, 드라이버가, 급격하게 브레이크 페달을 답입하여 정지하는 급정지 시 등에는, 차량이 정지할 때까지의 시간 내에, CVT(20)의 변속비 Ratio를 최LOW까지 완전히 변경할 수 없는 경우가 있다.
CVT(20)의 변속비 Ratio의 변경은, 통상, CVT(20)의 작동 중, 즉, 프라이머리 풀리(21)나 세컨더리 풀리(22)의 회전 중이 아니면 실시할 수는 없다.
따라서, 본 제어 장치에서는, 차량이 정지한 경우라도, 프라이머리 풀리(21)나 세컨더리 풀리(22)가 회전할 수 있도록, 변속기(4)의 구동륜(7)에의 출력부, 즉, CVT(20)와 구동륜(7) 사이에 장비된 동력을 단접할 수 있는 마찰 결합 요소(단순히, 클러치라고도 함)를 슬립 상태로 한다.
본 실시 형태에서는, CVT(20)와 구동륜(7) 사이에, Low 브레이크(32), High 클러치(33), Rev 브레이크(34)라 하는 마찰 결합 요소를 갖는 부변속 기구(30)가 장비되어 있으므로, 이 부변속 기구(30)의 마찰 결합 요소, 특히, 감속하여 정지한 시점에서 결합 상태에 있는 Low 브레이크(32)를 이용하여, 이 Low 브레이크(32)를 차량의 정지 상태에서도 프라이머리 풀리(21)나 세컨더리 풀리(22)가 회전할 수 있도록 슬립 상태로 제어한다.
프라이머리 풀리(21)나 세컨더리 풀리(22)가 회전할 수 있도록 하기 위해서는, 결합 상태에 있는 Low 브레이크(32)를 해방해 버릴 수도 있지만, 차량이 오르막길에 정지하고 있으면, Low 브레이크(32)를 해방해 버리면, 구동륜(7)에의 동력 전달이 차단되므로, 차량이 미끄러져 버릴 우려가 있다.
또한, 차량이 정지하고 있는 도로가 오르막길이 아니고 차량이 미끄러질 우려가 없어도, Low 브레이크(32)를 완전히 해방해 버리면, 만약 이 Low 브레이크(32)의 해방 상태에서 재발진 요구가 있으면, Low 브레이크(32)가 결합할 때까지에 타임 래그가 발생한다. 이에 의한 동력 전달 래그가, 재발진 시에 차량에 반응지연을 발생시켜 버린다. 이 래그를 저감시키기 위해 라인압을 높게 설정하는 것이 유효하지만, 이 방법은, 클러치나 브레이크의 결합 쇼크를 초래하므로 채용할 수 없다.
따라서, Low 브레이크(32)를 해방해 버리는 것이 아니라, 슬립 상태로 하여, 차량이 정지하고 있어도 프라이머리 풀리(21)나 세컨더리 풀리(22)가 회전할 수 있도록 하고, 또한, 구동륜(7)에 동력 전달할 수 있고, 또한, Low 브레이크(32)의 체결에 관한 타임 래그의 발생을 해소할 수 있도록 하고 있는 것이다.
단, 오르막길 이외에서 단순히 Low 브레이크(32)를 슬립 상태로 하기 위해서는, 약간이라도 Low 브레이크(32)의 결합 요소간이 접촉하고 있으면 되지만, 차량이 오르막길에 정지하고 있는 경우에는, 차량이 미끄러져 버리지 않도록, 구동륜(7)에 미끄러짐을 방지할 수 있을 만큼의 동력을 전달하는 것이 필요해진다. Low 브레이크(32)를 슬립 상태로 하면서 구동륜(7)에 필요한 동력을 전달하기 위해서는, Low 브레이크(32)의 결합압을 높이면 되지만, Low 브레이크(32)의 결합압을 높이면, 프라이머리 풀리(21)나 세컨더리 풀리(22)의 회전 속도를 충분히 확보할 수 없게 되어, CVT(20)의 변속비 Ratio를 최LOW까지 변경하는 데 시간을 필요로 해 버린다.
따라서, 본 실시 형태에서는, Low 브레이크(32)의 결합압을 지나치게 높이지 않고 구동륜(7)에 필요한 동력을 전달할 수 있도록, Low 브레이크(32)의 결합압은 억제하지만 엔진 토크를 증가 제어하여, 구동륜(7)에 필요한 동력을 전달할 수 있도록 하고 있다.
구동륜(7)에 전달해야 하는 차량의 미끄러짐을 방지할 수 있을 만큼의 동력은, 오르막길의 구배(전후 경사)에 대응하므로, 본 장치에서는, 오르막길의 구배(전후 경사)를 추정하여, 이 추정한 도로 구배(추정 도로 구배)에 대응하여, Low 브레이크(32)의 결합압(클러치 체결 용량)과 엔진(1)에 필요한 토크(필요 엔진 토크)를 설정하여, Low 브레이크(32)의 결합압이 설정한 결합압(설정압)으로 되도록, 엔진(1)의 토크가 설정한 토크(설정 토크)로 되도록, 각각 제어한다. 엔진 토크의 제어는, 설정 토크를 엔진 컨트롤러(엔진 ECU)(50)에 송신함으로써 엔진 컨트롤러(50)를 통해 행한다. 또한, 본 실시 형태에서는, 이러한 클러치 체결 용량 및 필요 엔진 토크의 설정은, 미리 설치한 맵을 사용한 산출에 의해 행한다.
또한, 이때의 Low 브레이크(32)의 결합압(클러치 체결 용량) 및 엔진(1)의 토크의 제어는, 오르막길의 구배(경사)에 따라 행하므로, 여기서는, 이들의 제어, 특히, 이들의 제어에 관한 각 값의 설정의 처리에 대해, 경사 제어라고도 한다.
한편, 오르막길 이외에서는, 단순히 Low 브레이크(32)를 슬립 상태로 하기만 하면 되고, 약간이라도 Low 브레이크(32)의 결합 요소간이 접촉하고 있으면 되므로, 이러한 Low 브레이크(32)의 결합압(클러치 체결 용량)으로서, 예를 들어 슬립 상태로 할 수 있는 최소 결합압에 기초한 일정한 결합압(클러치 체결 용량)을 미리 설정하고, Low 브레이크(32)를 이 일정한 결합압으로 제어하고, 엔진(1)의 토크는 특별히 제어하지는 않는다. 따라서, 엔진(1)은 아이들 운전 상태로 된다.
또한, 정지 시의 로우 복귀 제어(제1 로우 복귀 제어)는, Low 브레이크(32)를 슬립 상태로 한 결과 발생하는 Low 브레이크(32)의 입출력 회전 속도차, 즉, Low 브레이크(32)의 입력측의 회전 속도(세컨더리 회전 속도) Nsec와, Low 브레이크(32)의 출력측의 회전 속도 Nout의 차(=Nsec-Nout)가 기준값 δ 이상으로 되면 개시한다. 이에 의해, 로우 복귀 제어를 원활하게 행할 수 있도록 하고 있다.
〔무단 변속기의 제어 장치의 작용 및 효과〕
본 발명의 일 실시 형태에 관한 무단 변속기의 제어 장치는, 상술한 바와 같이 구성되므로, 예를 들어 도 3, 도 4에 나타내는 바와 같이 무단 변속기의 제어가 행해진다. 또한, 도 3, 도 4에 나타내는 플로우는 차량의 시동과 함께 개시되고, 미리 설정된 제어 주기로 반복하여 실시된다.
도 3에 나타내는 바와 같이, 우선, 제어 플래그 F가 판정된다(스텝 S10). 이 제어 플래그 F는, 제어 개시 시에는 0으로 되고, 그 후, 차량이 정지하여 제1 로우 복귀 제어의 실시 중에는 1로 되고, 또한, 제1 로우 복귀 제어가 종료되고, Low 브레이크(32)의 체결 제어 중(클러치 체결 제어 중)에는 2로 된다. 또한, Low 브레이크(32)의 체결 제어가 완료되면 0으로 리셋된다.
제어 플래그 F가 0이면, 브레이크 스위치, 차속 Vsp, 변속비 Ratio의 각 정보를 도입하고(스텝 S20), 제동 상태(브레이크 온)에서 차속 Vsp가 설정 차속 V0 이하로 되었는지 여부를 판정한다(스텝 S30). 제동 상태가 아니거나, 또는, 차속 Vsp가 설정 차속 V0보다도 크면, 금회의 처리를 종료한다. 제동 상태에서 차속 Vsp가 설정 차속 V0 이하로 된 경우, 변속비 Ratio가 「최LOW」(즉, 최대 변속비)인지 여부를 판정하고(스텝 S40), 변속비 Ratio가 최LOW이면, 금회의 처리를 종료한다.
한편, 변속비 Ratio가 최LOW가 아니면, 차속 Vsp가 0으로 되었는지 여부를 판정한다(스텝 S50). 차속 Vsp가 0으로 되어 있지 않으면 프라이머리압 Ppri를 감압시키는 제2 로우 복귀 제어를 실시한다(스텝 S60). 통상이라면, 제2 로우 복귀 제어에 의해, 차량이 정지할 때까지 변속비 Ratio가 최LOW까지 조작되고, 최종적으로 스텝 S40에서 부정되어 제어가 종료되지만, 급감속 등에 의해, 차량이 정지할 때까지에 변속비 Ratio가 최LOW까지 도달하지 않는 경우에는, 스텝 S40 및 스텝 S50에 있어서 긍정 판정된다.
이 경우에는, 우선, 그때의 변속비 Ratio에 따른 LOW 복귀 제어 시간 t1을 설정한다(스텝 S70). 이 LOW 복귀 제어 시간 t1에 대해서는 후술하지만, LOW 복귀 제어 시간 t1은 변속비 Ratio와 최LOW의 차가 클수록 길게 한다. 또한, 차량이 정지한 도로의 구배각(전후 경사각) θ를 추정한다(스텝 S80). 그리고, 구배각 θ를 오르막길 판정 기준값 θs와 비교한다(스텝 S90). 오르막길 판정 기준값 θs는, 0에 가까운 정의 값(구배각 θ는 오르막 구배가 정)으로 한다. 여기서, 구배각 θ가 오르막길 판정 기준값 θs 미만이면, 차량이 정지한 도로는 오르막길이 아니므로, 미리 설정된 일정한 결합압(클러치 체결 용량)을 판독하고(스텝 S100), 이 일정한 결합압에 기초하여 클러치 슬립 제어를 실시한다(스텝 S130).
한편, 구배각 θ가 오르막길 판정 기준값 θs 이상이면, 차량이 정지한 도로는 오르막길이므로, 우선, 경사 제어의 처리(스텝 S110)를 행한다. 이 경사 제어의 처리에서는, 도 4의 (a)에 나타내는 바와 같이, 구배각 θ에 따라 Low 브레이크(32)의 결합압(클러치 체결 용량)을 산출하고(스텝 S112), 구배각 θ에 따라 엔진(1)에 필요한 토크(필요 엔진 토크)를 산출한다(스텝 S114). 일반적으로, 구배각 θ가 클수록 Low 브레이크(32)의 결합압(클러치 체결 용량)이 높게 부여되고, 마찬가지로, 구배각 θ가 클수록 엔진(1)의 토크가 크게 설정된다.
경사 제어의 처리를 종료하면, 도 3에 나타내는 바와 같이, 필요 엔진 토크에 따라, 엔진(1)의 토크를 제어하고(스텝 S120), 산출한 클러치 체결 용량에 기초하여 클러치 슬립 제어를 실시한다(스텝 S130).
이 클러치 슬립 제어에서는, 도 4의 (b)에 나타내는 바와 같이, Low 브레이크(32)의 결합압(클러치압)이 목표압 Pct로 될 때까지 감압한다(스텝 S132, S134). 또한, 이 목표압 Pct는, 오르막길이 아니면 스텝 S100에서 판독한 일정한 결합압(클러치 체결 용량)이며, 오르막길이면 스텝 S112에서 산출한 구배각 θ에 따른 결합압(클러치 체결 용량)이다. 또한, 이 감압은 제어 주기마다 소정압을 감하여 실시한다.
이 클러치 슬립 제어 중에는, 플래그 F를 1로 세트한다(스텝 S140). 그리고, Low 브레이크(32)의 입출력 회전 속도차, 즉, Low 브레이크(32)의 입력측의 회전 속도에 상당하는 세컨더리 회전 속도 센서(43)의 검출 신호(세컨더리 회전 속도) Nsec와, Low 브레이크(32)의 출력측의 회전 속도 Nout의 차(=Nsec-Nout)가 연산되고, 이 입출력 회전 속도차를 기준값 δ와 비교한다(스텝 S150).
여기서, 입출력 회전 속도차가 기준값 δ 이상으로 되면, 프라이머리압 Ppri를 감압시키는 제1 로우 복귀 제어를 실시한다(스텝 S160). 이 제1 로우 복귀 제어는, 타이머 카운트(카운트값 tn, tn의 초기값은 0, 카운트 가산값은 t0)를 기동시키고(스텝 S170), 타이머 카운트값 tn이 변속비 Ratio에 따라 설정된 LOW 복귀 제어 시간 t1에 도달할 때까지(스텝 S180), 계속해서 행한다.
타이머 카운트값 tn이 LOW 복귀 제어 시간 t1에 도달하면, 플래그 F를 2로 세트한다(스텝 S190). 그리고, 엔진 토크 제어(스텝 S120) 및 클러치 슬립 제어(스텝 S130)를 종료하고(스텝 S200), 클러치 체결 제어(스텝 S210)를 행한다.
이 클러치 체결 제어에서는, 도 4의 (c)에 나타내는 바와 같이, Low 브레이크(32)의 결합압(클러치압)을 체결압 Pc1로 될 때까지 증압 제어한다(스텝 S212, S214). Low 브레이크(32)의 결합압(클러치압)이 체결압 Pc1로 되면, 플래그 F를 0으로 리셋한다(스텝 S216). 그리고, 종료 판정(스텝 S220)을 거쳐, 제어를 종료한다.
따라서, 급제동에 의해 차속이 0으로 된 차량 정지 시에도, 변속비를 최대 변속비로 조작할 수 있고, 재발진 시의 발진 성능을 확보할 수 있다. 또한, 이때에도, 구동륜(7)에의 동력이 완전히 차단되는 일이 없으므로 예를 들어 정지한 도로가 오르막길이라도 차량의 미끄러짐을 억제할 수 있다. 또한, 마찰 결합 요소의 Low 브레이크(32)가 슬립 상태로 되므로, 재발진 시의 동력 전달 래그의 발생을 억제할 수 있고, 라인압을 높게 설정할 필요도 없다.
또한, 차량이 정지한 도로가 오르막 구배(즉, 오르막길)인 경우, 마찰 결합 요소의 Low 브레이크(32)를 슬립 상태로 하는 결합압을 도로의 구배각 θ에 따라 설정하고, 이 설정압으로 되도록 Low 브레이크(32)의 결합압을 제어함으로써, 정지한 도로가 오르막길인 경우의 차량의 미끄러짐을 확실하게 억제하면서, 변속비를 최대 변속비로 조작할 수 있다.
본 실시 형태의 경우, 또한, 엔진(1)에 필요한 토크를 구배각 θ에 따라 설정하여 엔진 토크를 제어하므로, 오르막길에서의 차량의 미끄러짐을 한층 더 확실하게 억제하면서, 변속비를 빠르게 최대 변속비로 조작할 수 있다.
차량이 정지한 도로가 오르막 구배가 아닌 경우에는, 마찰 결합 요소를 슬립 상태로 하는 최소 결합압에 기초하여 Low 브레이크(32)의 결합압을 제어함으로써, 결합압의 부여에 드는 에너지를 절약할 수 있다.
그리고, 변속비 Ratio와 최LOW의 차가 클수록 길게 설정한 LOW 복귀 제어 시간 t1만큼 제1 로우 복귀 제어를 실시하므로, 심플한 로직으로 제1 로우 복귀 제어를 종료시킬 수 있다.
또한, Low 브레이크(32)의 입출력 회전 속도차가 미리 설정된 기준 회전 속도차 δ보다도 커지면 제1 로우 복귀 제어를 개시함으로써, 제1 로우 복귀 제어를 원활하게 실시할 수 있다.
이상, 본 발명의 실시 형태에 대해 설명하였지만, 본 발명은 상술한 실시 형태에 한정되는 것이 아니라, 본 발명의 취지를 일탈하지 않는 범위에서 다양하게 변형하여 실시할 수 있다.
예를 들어, 상기 실시 형태에서는, 오르막길 정지 시의 마찰 결합 요소의 슬립 제어 시에, 엔진의 토크도 제어하고 있지만, 엔진 토크까지는 제어하지 않고, 결합압만을 제어해도 된다.
또한, 상기한 실시 형태에서는, 제동 상태에서 차속 Vsp가 설정 차속 V0 이하로 되었는지 여부를 판정하고(스텝 S30), 제동 상태에서 차속 Vsp가 설정 차속 V0 이하로 된 경우에, 변속비 Ratio가 최LOW인지 여부를 판정하고 있지만(스텝 S40), 변속비 Ratio가 최LOW인지 여부를 판정하는 전제 조건으로서, 제동 상태인지 여부는 생략 가능하다. 즉, 도 3의 스텝 S30의 판정을, 단순히 「차속 Vsp가 설정 차속 V0 이하로 되었는지 여부」로 하고, 차속 Vsp가 설정 차속 V0 이하로 되어 있지 않은 경우에는 금회의 처리를 종료하고, 차속 Vsp가 설정 차속 V0 이하로 된 경우에는, 변속비 Ratio가 최LOW인지 여부를 판정하도록 구성해도 된다. 이 경우, 브레이크 스위치 등으로부터의 제동의 유무에 관한 정보는 불필요해진다.
또한, 무단 변속 기구는, 벨트식에 한정하지 않고, 체인식, 토로이달식 등이어도 된다.
또한, 마찰 결합 요소는, 상기 구동륜에의 출력부에 장비되어 동력을 단접하는 것이면 되고, Low 브레이크(32)에 한정되지 않는다.
Claims (6)
- 차량의 엔진과 구동륜 사이에 탑재되고, 무단 변속 기구와, 상기 구동륜에의 출력부에 장비되어 동력을 단접하는 마찰 결합 요소를 갖는 무단 변속기에 있어서, 상기 무단 변속 기구의 변속비 및 상기 마찰 결합 요소를 제어하는, 무단 변속기의 제어 장치이며,
상기 차량의 차속을 검출하는 차속 검출 수단과,
상기 변속비를 검출하는 변속비 검출 수단과,
상기 차속 검출 수단으로부터의 검출 차속 정보에 기초하여, 상기 차속이 0으로 된 차량 정지 시에, 상기 변속비 검출 수단에 의한 검출 변속비가 최대 변속비인지 여부를 판정하고, 상기 검출 변속비가 최대 변속비가 아닌 경우, 상기 마찰 결합 요소를 슬립 상태로 제어하면서 상기 변속비를 최대 변속비로 조작하는 로우 복귀 제어를 실시하는 제어 수단을 구비하고 있는, 무단 변속기의 제어 장치. - 제1항에 있어서, 상기 차량이 정지한 도로의 구배를 추정하는 구배 추정 수단을 더 구비하고,
상기 제어 수단은, 상기 구배 추정 수단에 의한 추정 도로 구배가 오르막 구배인지 여부를 판정하고, 상기 추정 도로 구배가 오르막 구배이며 상기 로우 복귀 제어를 실시할 때에는, 상기 마찰 결합 요소를 슬립 상태로 하는 결합압을 상기 추정 도로 구배에 따라 제어하는, 무단 변속기의 제어 장치. - 제2항에 있어서, 상기 제어 수단은, 상기 추정 도로 구배가 오르막 구배이며 상기 로우 복귀 제어를 실시할 때에는, 상기 마찰 결합 요소의 결합압을 상기 추정 도로 구배에 따라 제어함과 함께, 상기 엔진에 필요한 토크를 상기 추정 도로 구배에 따라 설정하여 이 설정 토크를 상기 엔진의 제어 수단에 출력하는, 무단 변속기의 제어 장치.
- 제2항 또는 제3항에 있어서, 상기 제어 수단은, 상기 구배 추정 수단에 의한 추정 도로 구배가 오르막 구배가 아니고 상기 로우 복귀 제어를 실시할 때, 상기 마찰 결합 요소가 슬립 상태로 되는 최소 결합압에 기초하여 상기 마찰 결합 요소의 결합압을 제어하는, 무단 변속기의 제어 장치.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 차량 정지 시에 있어서의 상기 검출 변속비에 따라 제어 시간을 설정하고, 이 제어 시간만큼 상기 로우 복귀 제어를 실시하는, 무단 변속기의 제어 장치.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 상기 제어 수단은, 슬립 상태로 된 상기 마찰 결합 요소의 입출력 회전 속도차가 미리 설정된 기준 회전 속도차 이상으로 되면 상기 로우 복귀 제어를 개시하는, 무단 변속기의 제어 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2012-084074 | 2012-04-02 | ||
| JP2012084074 | 2012-04-02 | ||
| PCT/JP2013/059870 WO2013151000A1 (ja) | 2012-04-02 | 2013-04-01 | 無段変速機の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140143165A true KR20140143165A (ko) | 2014-12-15 |
| KR101624824B1 KR101624824B1 (ko) | 2016-05-26 |
Family
ID=49300483
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147027834A KR101624824B1 (ko) | 2012-04-02 | 2013-04-01 | 무단 변속기의 제어 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9279496B2 (ko) |
| EP (1) | EP2835563B1 (ko) |
| JP (1) | JP5745687B2 (ko) |
| KR (1) | KR101624824B1 (ko) |
| CN (1) | CN104246315B (ko) |
| WO (1) | WO2013151000A1 (ko) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5936633B2 (ja) * | 2014-01-17 | 2016-06-22 | ジヤトコ株式会社 | ベルト式無段変速機の変速制御装置 |
| JP5901700B2 (ja) * | 2014-06-20 | 2016-04-13 | ジヤトコ株式会社 | マルチディスク変速機及びその制御方法 |
| US9400042B2 (en) * | 2014-10-23 | 2016-07-26 | Gm Global Technology Operations, Llc | Two mode continuously variable transmission |
| DE112016000215T5 (de) * | 2015-03-27 | 2017-09-28 | Aisin Aw Co., Ltd. | Steuervorrichtung und Steuerverfahren für ein kontinuierlich variables Getriebe |
| JP2016190605A (ja) * | 2015-03-31 | 2016-11-10 | いすゞ自動車株式会社 | 道路勾配推定装置及び道路勾配推定方法 |
| WO2016208438A1 (ja) * | 2015-06-23 | 2016-12-29 | ジヤトコ株式会社 | 変速機及び変速機の制御方法 |
| US10385967B2 (en) * | 2015-11-09 | 2019-08-20 | GM Global Technology Operations LLC | Method and apparatus to control a continuously variable transmission |
| US10408343B2 (en) * | 2017-06-30 | 2019-09-10 | GM Global Technology Operations LLC | Continuously variable transmission pump limited stop controls |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61290269A (ja) * | 1985-06-18 | 1986-12-20 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| JPH0657509B2 (ja) * | 1986-09-29 | 1994-08-03 | 富士重工業株式会社 | 無段変速機の制御装置 |
| JPH0198748A (ja) * | 1987-10-07 | 1989-04-17 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP3006070B2 (ja) * | 1990-11-01 | 2000-02-07 | トヨタ自動車株式会社 | 車両用無段変速機の変速比制御装置 |
| JP3565122B2 (ja) * | 1999-12-24 | 2004-09-15 | 三菱自動車工業株式会社 | 車両用自動変速機のクリープ力制御装置 |
| JP4344379B2 (ja) * | 2006-12-06 | 2009-10-14 | ジヤトコ株式会社 | 無段変速機の制御装置 |
| WO2009116319A1 (ja) * | 2008-03-21 | 2009-09-24 | ジヤトコ株式会社 | 無段変速機の制御装置 |
| JP4660583B2 (ja) * | 2008-09-25 | 2011-03-30 | ジヤトコ株式会社 | 無段変速機及びその変速制御方法 |
| JP4914467B2 (ja) * | 2009-07-17 | 2012-04-11 | ジヤトコ株式会社 | 無段変速機及びその制御方法 |
| JP4847567B2 (ja) * | 2009-08-26 | 2011-12-28 | ジヤトコ株式会社 | 無段変速機及びその制御方法 |
| JP5039815B2 (ja) * | 2010-08-05 | 2012-10-03 | ジヤトコ株式会社 | アイドルストップ車両 |
| JP5039819B2 (ja) * | 2010-09-01 | 2012-10-03 | ジヤトコ株式会社 | コーストストップ車両及びコーストストップ方法 |
-
2013
- 2013-04-01 US US14/389,599 patent/US9279496B2/en not_active Expired - Fee Related
- 2013-04-01 WO PCT/JP2013/059870 patent/WO2013151000A1/ja active Application Filing
- 2013-04-01 CN CN201380017872.2A patent/CN104246315B/zh not_active Expired - Fee Related
- 2013-04-01 JP JP2014509149A patent/JP5745687B2/ja not_active Expired - Fee Related
- 2013-04-01 EP EP13771840.9A patent/EP2835563B1/en not_active Not-in-force
- 2013-04-01 KR KR1020147027834A patent/KR101624824B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| EP2835563A4 (en) | 2016-07-20 |
| EP2835563B1 (en) | 2018-01-31 |
| JPWO2013151000A1 (ja) | 2015-12-17 |
| CN104246315A (zh) | 2014-12-24 |
| WO2013151000A1 (ja) | 2013-10-10 |
| CN104246315B (zh) | 2017-11-24 |
| JP5745687B2 (ja) | 2015-07-08 |
| US9279496B2 (en) | 2016-03-08 |
| KR101624824B1 (ko) | 2016-05-26 |
| US20150066320A1 (en) | 2015-03-05 |
| EP2835563A1 (en) | 2015-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101624824B1 (ko) | 무단 변속기의 제어 장치 | |
| KR101602607B1 (ko) | 벨트식 무단 변속기의 변속 제어 장치 | |
| KR101587747B1 (ko) | 코스트 스톱 차량 및 코스트 스톱 차량의 제어 방법 | |
| KR101259306B1 (ko) | 코스트 스톱 차량 및 코스트 스톱 방법 | |
| JP5740336B2 (ja) | 無段変速機の変速制御装置 | |
| KR101322069B1 (ko) | 차량의 제어 장치 | |
| JP5542607B2 (ja) | コーストストップ車両及びコーストストップ方法 | |
| JP5750162B2 (ja) | 車両制御装置、及びその制御方法 | |
| MX2012009031A (es) | Transmision automatica y metodo de control para la misma. | |
| EP3054197B1 (en) | Control device for stepped transmission mechanism and system | |
| KR101929107B1 (ko) | 자동 변속기의 제어 장치 및 제어 방법 | |
| WO2017051678A1 (ja) | 車両のセーリングストップ制御方法及び制御装置 | |
| US9845095B2 (en) | Vehicle control device and vehicle control method | |
| CN108603590B (zh) | 车辆的控制装置 | |
| JP4821124B2 (ja) | 車両の発進摩擦要素制御装置 | |
| KR20180100683A (ko) | 차량의 제어 장치 및 차량의 제어 방법 | |
| JP6019051B2 (ja) | ベルト無段変速機及びその制御方法 | |
| JP6598712B2 (ja) | 車両のセーリングストップ制御方法及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20190417 Year of fee payment: 4 |